El Compás Satelitario y propuesta de un prototipo de bajo ...
74
El Compás Satelitario Ernesto Martínez de Carvajal Hedrich 1 El Compás Satelitario y propuesta de un prototipo de bajo coste TFC Licenciatura en Navegación y Transporte marítimo de la FNB. Autor: Ernesto Martínez de Carvajal Hedrich - Diplomado en Navegación y Transporte Marítimo. - Técnico Superior en Navegación, Pesca y Transporte Marítimo. - Técnico Superior Informático. - Piloto de segunda de la Marina Mercante. - Patrón de Altura de la Marina Mercante. - Comisario de Averías.
Transcript of El Compás Satelitario y propuesta de un prototipo de bajo ...

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
1
El Compaacutes Satelitario y propuesta de
un prototipo de bajo coste
TFC Licenciatura en Navegacioacuten y Transporte
mariacutetimo de la FNB
Autor Ernesto Martiacutenez de Carvajal Hedrich
- Diplomado en Navegacioacuten y Transporte Mariacutetimo
- Teacutecnico Superior en Navegacioacuten Pesca y Transporte Mariacutetimo
- Teacutecnico Superior Informaacutetico
- Piloto de segunda de la Marina Mercante
- Patroacuten de Altura de la Marina Mercante
- Comisario de Averiacuteas
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
2
Iacutendice
1- Introduccioacuten 3
2- Evolucioacuten de los equipos de medicioacuten de rumbo 4
21- Queacute es el rumbo 4
22- Equipos de medicioacuten del rumbo 7
221- El compaacutes magneacutetico 8
222- Bitaacutecora 15
222- El girocompaacutes 16
223- El GPS 19
224- El Compaacutes fluxgate 27
225- El compaacutes satelitario 30
226- Progresioacuten tecnoloacutegica 30
3- El compaacutes satelitario 34
31- Componentes 37
311- La antena 38
312- El receptor de la sentildeal de correccioacuten diferencial 39
313- El procesador 41
314- La unidad de visualizacioacuten 41
4- Construccioacuten de un prototipo de bajo coste 49
41- CPU de LEGO 53
42- Sensores dGPS de Dexter Industries 54
43- Piezas varias de LEGO 58
44- El programa 59
5- Costes 62
6- Conclusiones 65
7 Anexos 67
71- Folleto del girocompaacutes GC85 de Simrad 67
72- Folleto del compas satelitario SC-110 de Furuno 69
8- Fuentes de informacioacuten 74
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
3
1- Introduccioacuten
Este trabajo de fin de carrera de los estudios de Licenciatura en Naacuteutica y Transporte
mariacutetimo versa sobre un dispositivo de medicioacuten de rumbo de reciente aparicioacuten
denominado Compaacutes Satelitario Como veremos a lo largo del mismo la tecnologiacutea
utilizada por este dispositivo ndash el GPS- en modo alguno puede considerarse novedosa
aunque siacute lo es el uso que se le ha dado Por ese motivo considero mucho maacutes
apropiada su denominacioacuten inglesa GPS Compass
El trabajo consta de los siguientes apartados
Introduccioacuten
Evolucioacuten de los equipos de medicioacuten de rumbo
El compaacutes satelitario
Construccioacuten de un prototipo de bajo coste
Conclusiones
Fuentes de informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
4
2- Evolucioacuten de los equipos de medicioacuten de rumbo
21- Queacute es el rumbo
Empezaremos por definir lo que se entiende por rumbo obviamente dentro del
mundo de la naacuteutica Seriacutea absurdo pretender inventar una nueva definicioacuten para un
concepto tan conocido por los navegantes por lo que reproducimos lo que puede
encontrarse en cualquier libro de naacuteutica
En navegacioacuten se define el rumbo como el aacutengulo medido en el plano horizontal
entre el norte y la direccioacuten de avance del barco medido en ciacuterculo es decir de 0ordm a
360ordm
El rumbo se expresa siempre con tres diacutegitos y si es necesario se antildeaden ceros a la
izquierda Asiacute al decir rumbo 028ordm se evitan errores de interpretacioacuten evitando la
confusioacuten con rumbo 128ordm o 228ordm
Anteriormente el rumbo se expresaba en cuadrantal por referencia a un cuadrante
de la rosa naacuteutica rumbo S 30ordm E significa 30 grados hacia el este contados desde el
sur lo que equivale a rumbo circular 150ordm Hoy en diacutea este formato no es el utilizado
habitualmente en la marina mercante
En la propia definicioacuten se incluye un concepto que requiere un breve anaacutelisis puesto
que como veremos de eacutel se derivan diferentes tipos de rumbo Nos referimos al
ldquoNorterdquo el cual tambieacuten encontramos profusamente definido en libros de navegacioacuten
El norte es el punto cardinal que indica sobre un meridiano la direccioacuten al Polo
Norte
Se trata por lo tanto de uno de los cuatro puntos cardinales y estaacute situado
diametralmente opuesto al Polo Sur En el hemisferio norte se corresponde con el
punto del horizonte cuya perpendicular pasa aproximadamente por la Estrella Polar
No obstante el primer elemento utilizado para medir rumbos fue el compaacutes o aguja
magneacutetica la cual se orienta hacia el norte magneacutetico que no tiene porqueacute coincidir
con el polo norte motivo por el cual ya tenemos dos posibles adjetivos para este
Norte
Norte verdadero
Es el que se corresponde con el Polo Norte geograacutefico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
5
Norte magneacutetico
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula que no tiene
porqueacute coincidir con la del Polo Norte geograacutefico Es diferente en cada zona del
planeta y la diferencia entre el norte verdadero y este se conoce como
declinacioacuten magneacutetica Por otro lado se ha de tener en cuenta que dado que el
campo magneacutetico terrestre es generado por el nuacutecleo de ferrita existente en en
interior de la Tierra y que dicho nuacutecleo gira ldquolibrementerdquo con respecto a ella el
norte magneacutetico variacutea su posicioacuten (aunque a efectos praacutecticos se considera que
cambia cada antildeo)
Por otro lado el compaacutes o aguja magneacutetica instalada a bordo de un buque se
encuentra afectado por los elementos metaacutelicos del mismo lo que genera un desviacuteo
que depende del rumbo del buque y que podemos conocer a traveacutes de la ldquotablilla de
desviacuteosrdquo Esto genera un tercer posible adjetivo para el teacutermino Norte
Norte de aguja
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula instalada a bordo
de un buque y que no tiene porqueacute coincidir con el norte magneacutetico
Esta seriacutea la representacioacuten graacutefica de los tres tipos de norte que hemos comentado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
6
Asiacute pues dado que en la definicioacuten de rumbo nos referimos a ldquoaacutengulo formado entre el
norte y la direccioacuten de avancerdquo nos aparecen nuevos conceptos en base que hagamos
referencia al norte verdadero magneacutetico o de aguja
Rumbo verdadero
Es el aacutengulo formado entre el norte verdadero y la direccioacuten del buque Es el
rumbo que podemos medir en las cartas o mediante equipos que no se vean
afectados ni por la declinacioacuten magneacutetica ni por el desviacuteo de aguja
Rumbo magneacutetico
Es el aacutengulo formado entre el norte magneacutetico y la direccioacuten del buque
Rumbo de aguja
Es el aacutengulo formado entre el norte de aguja y la direccioacuten del buque Es el
utilizado por el timonel cuando gobierna haciendo uso de la aguja
Esta seriacutea la representacioacuten graacutefica de los tres tipos de rumbo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
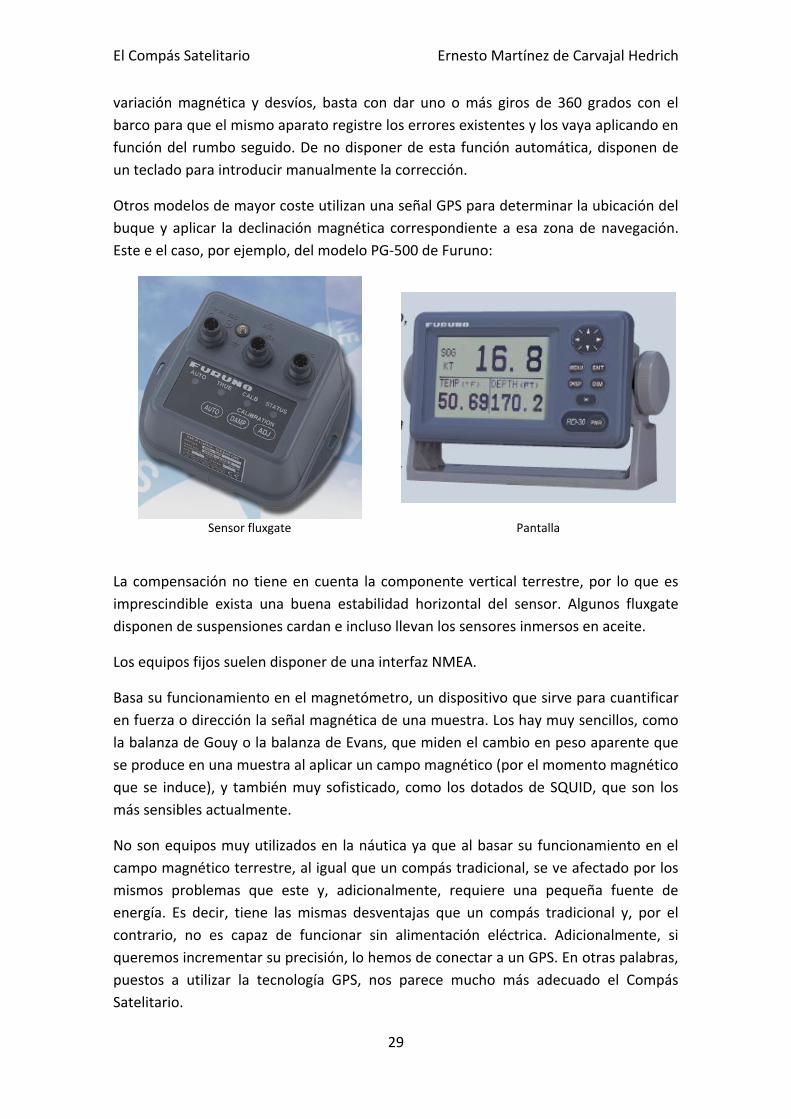
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
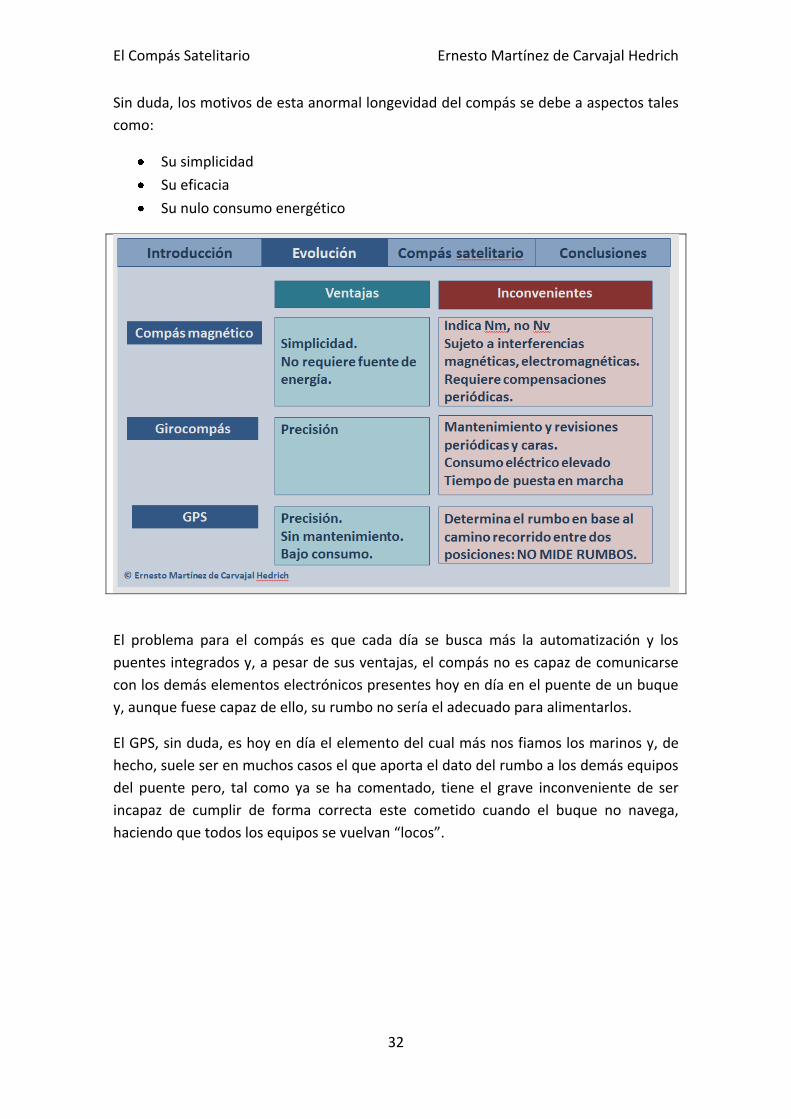
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
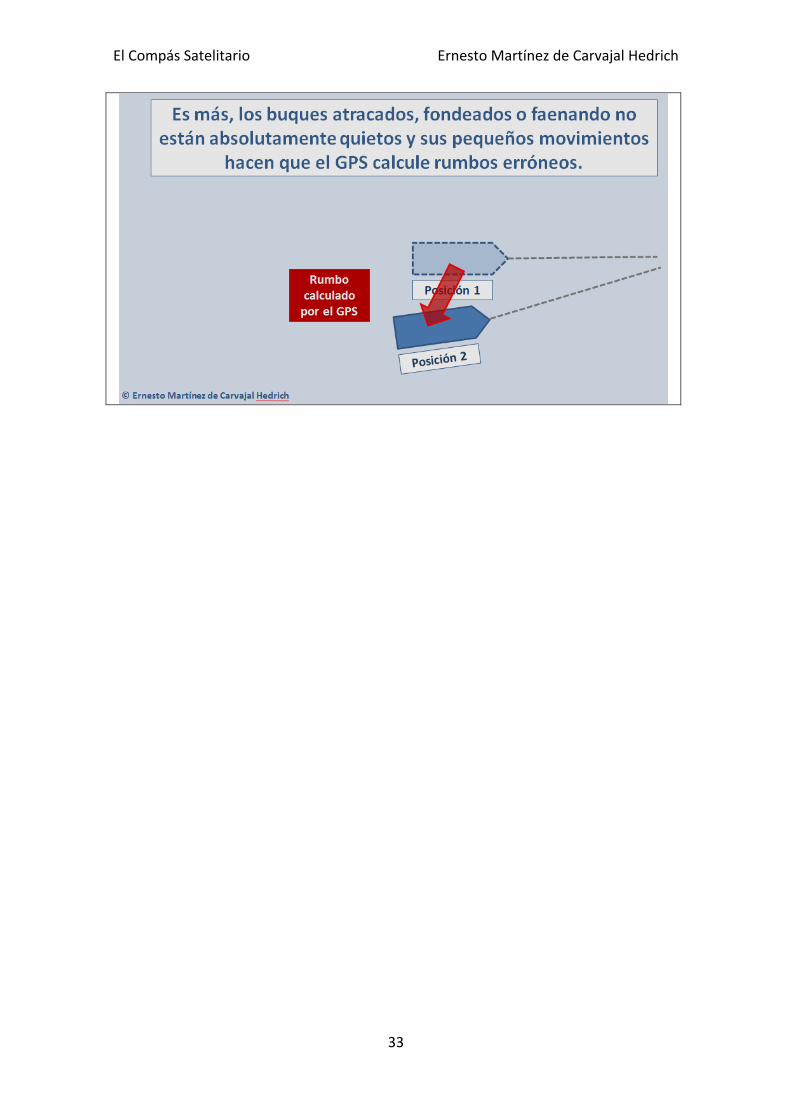
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
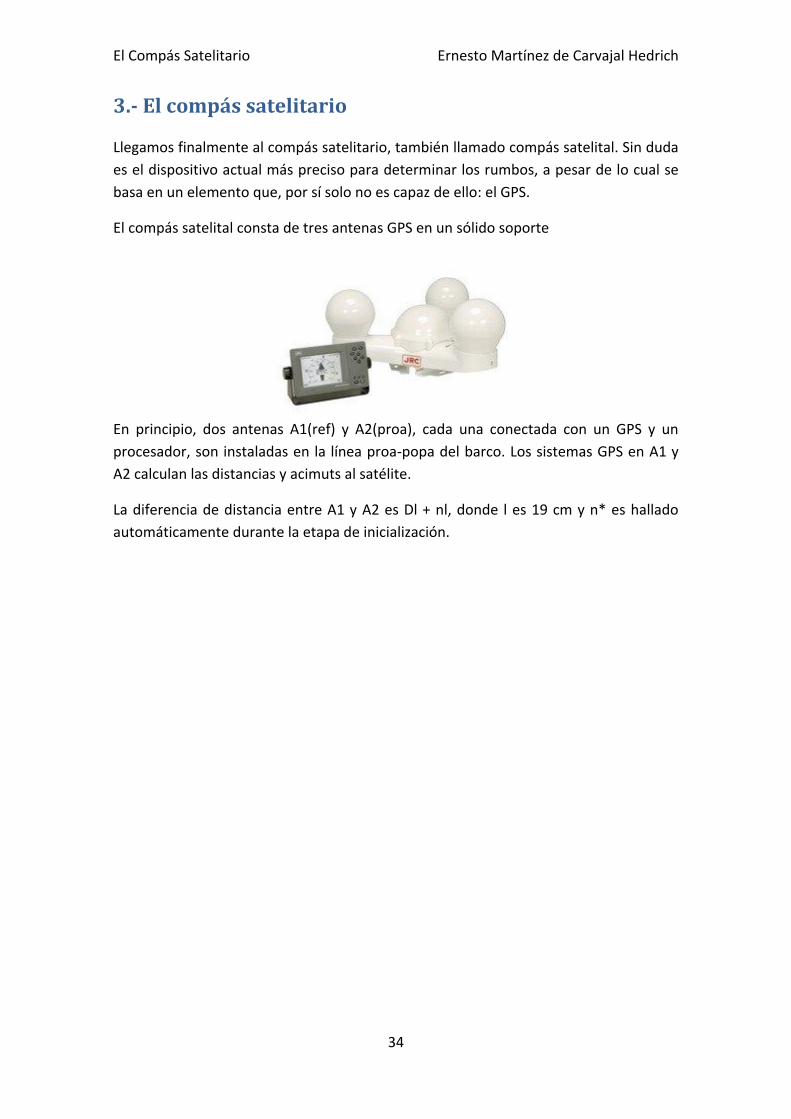
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
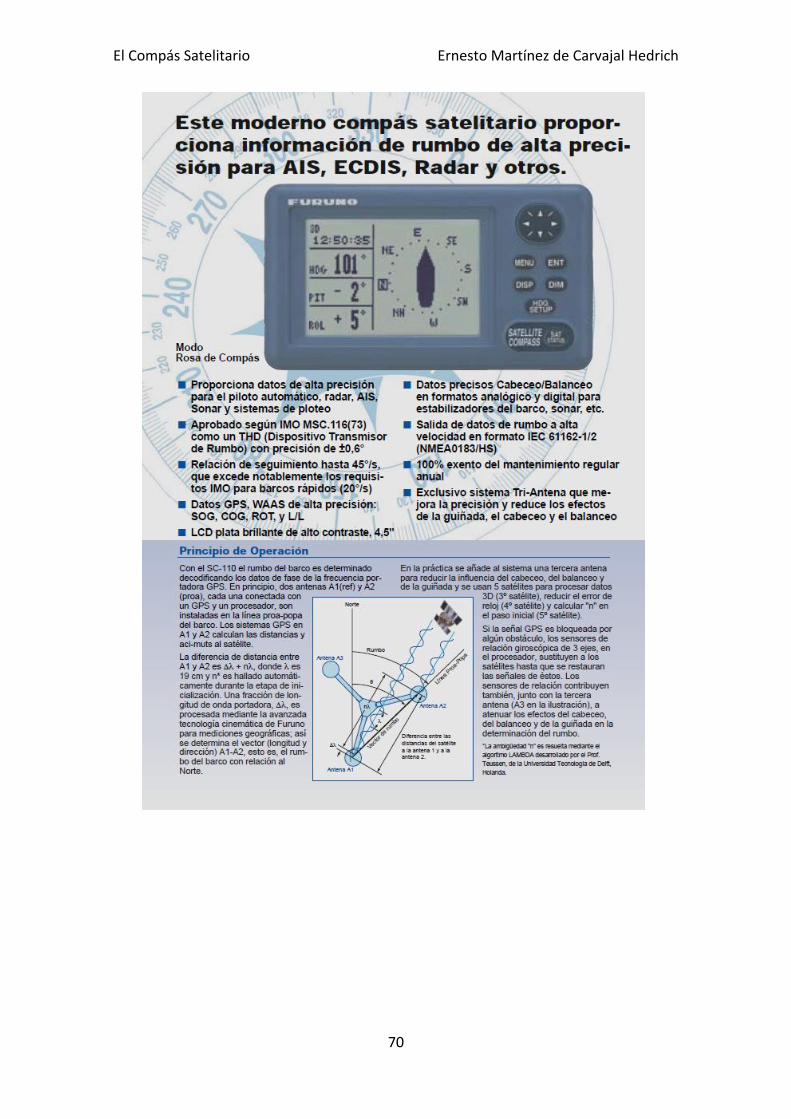
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
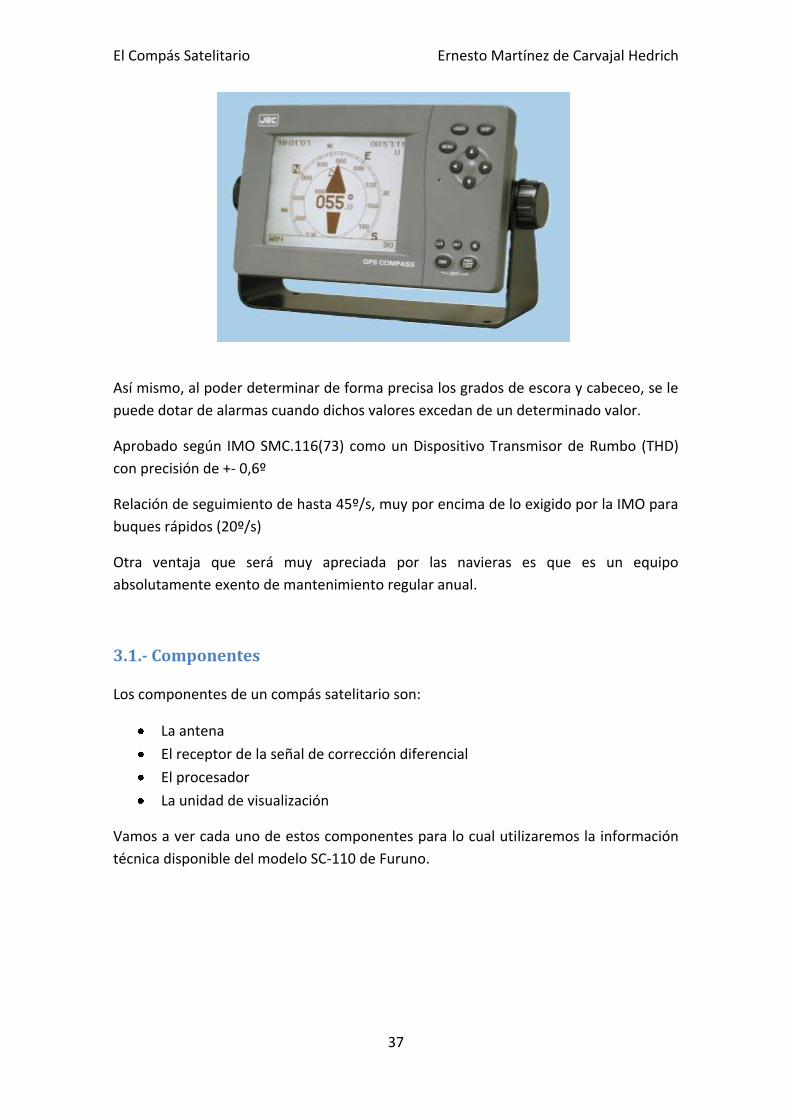
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
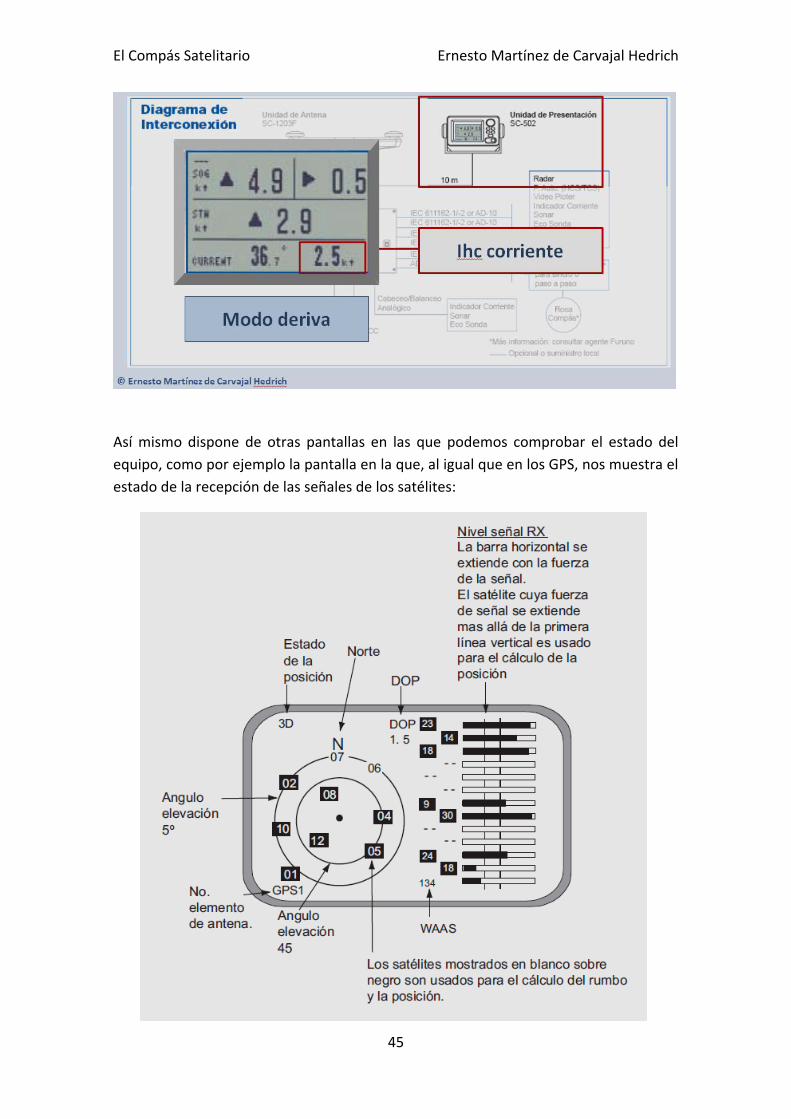
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
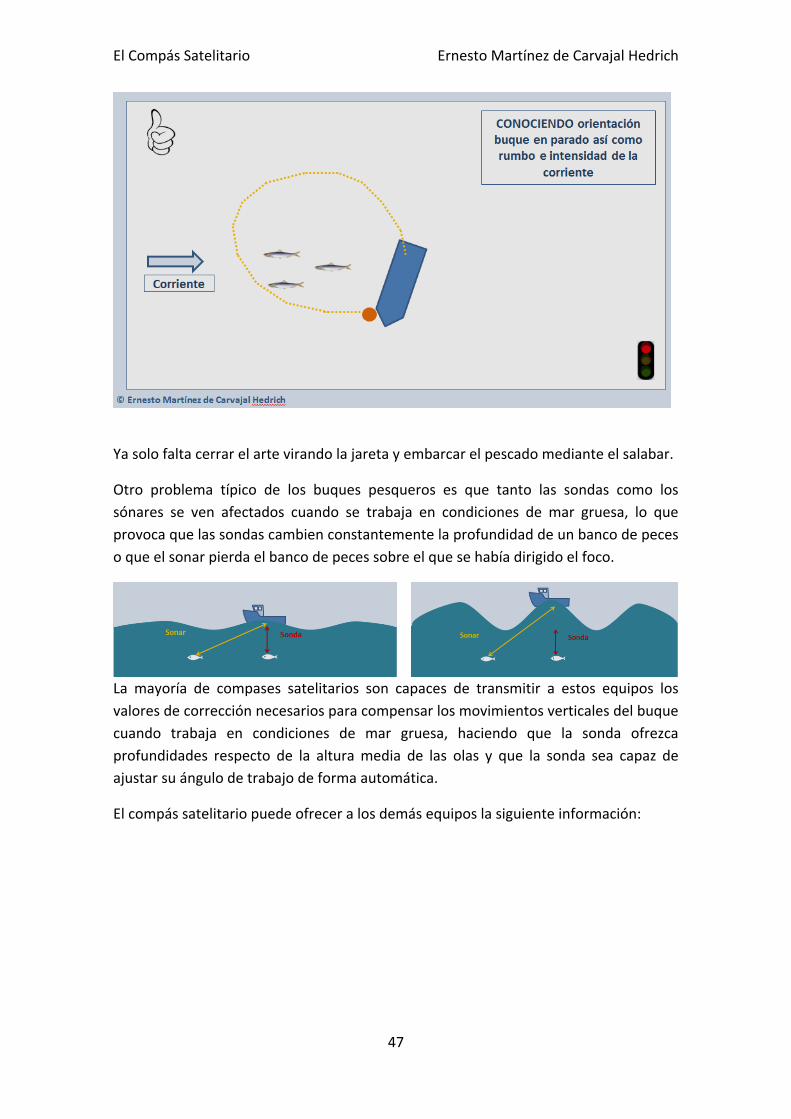
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
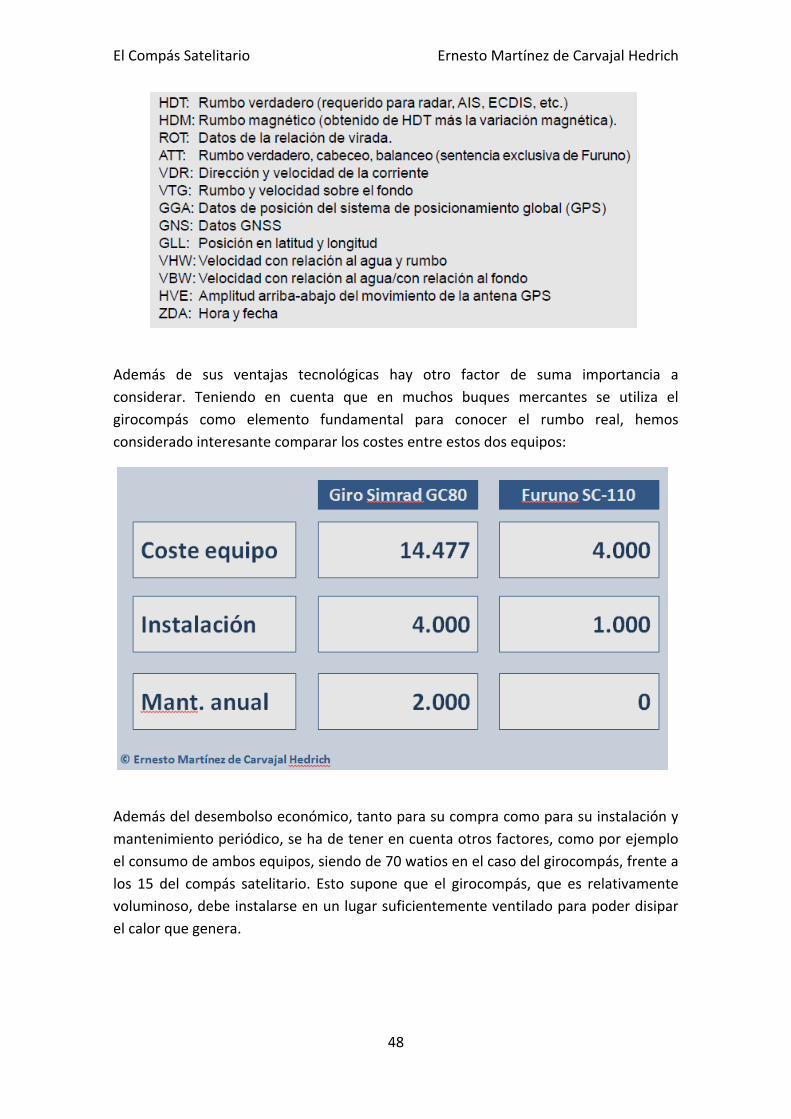
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
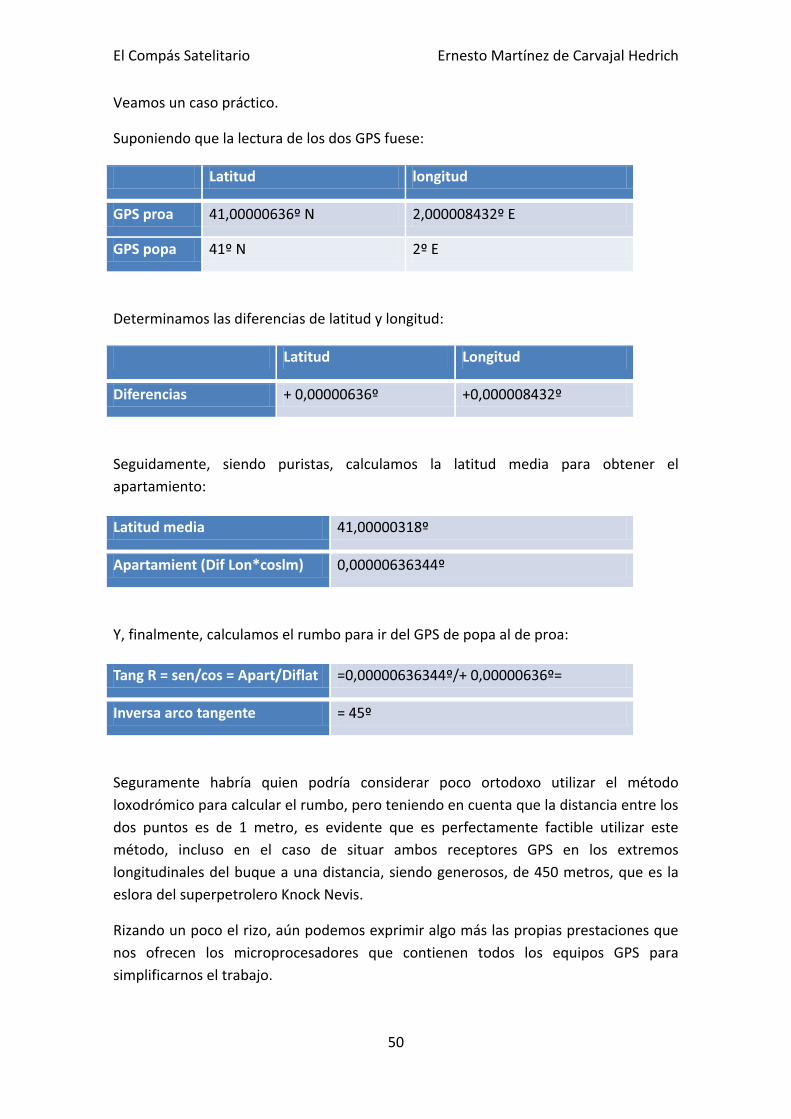
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
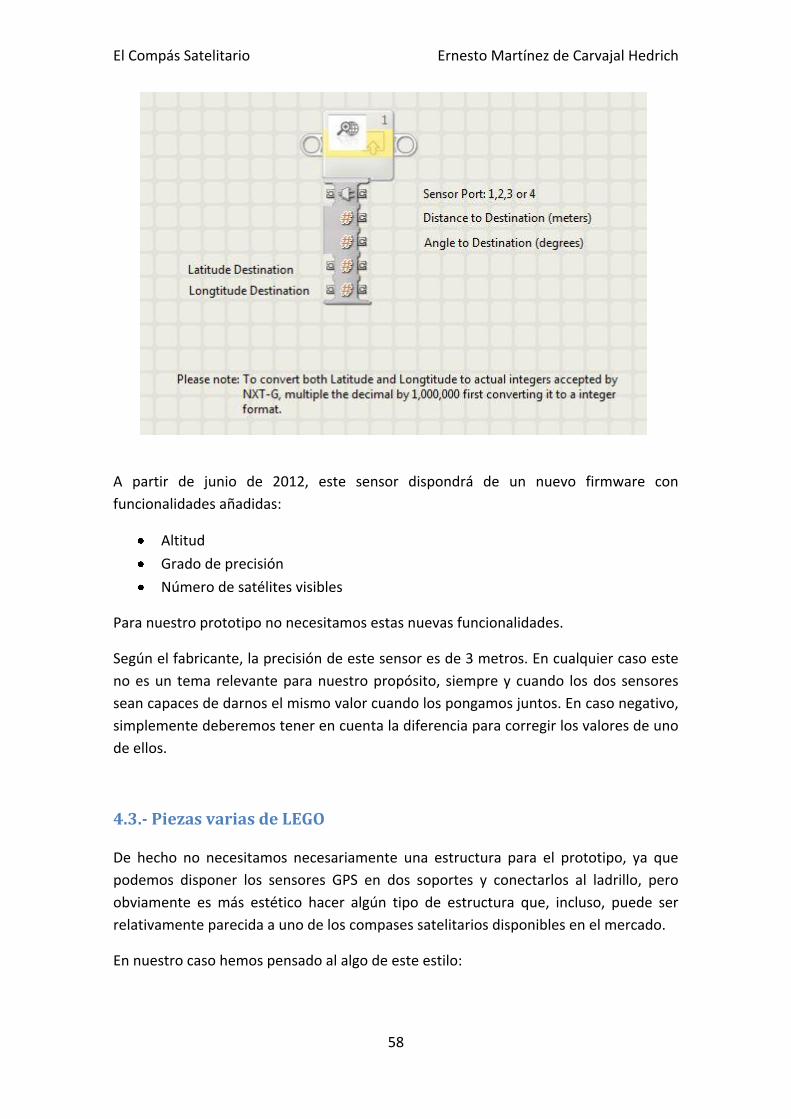
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
2
Iacutendice
1- Introduccioacuten 3
2- Evolucioacuten de los equipos de medicioacuten de rumbo 4
21- Queacute es el rumbo 4
22- Equipos de medicioacuten del rumbo 7
221- El compaacutes magneacutetico 8
222- Bitaacutecora 15
222- El girocompaacutes 16
223- El GPS 19
224- El Compaacutes fluxgate 27
225- El compaacutes satelitario 30
226- Progresioacuten tecnoloacutegica 30
3- El compaacutes satelitario 34
31- Componentes 37
311- La antena 38
312- El receptor de la sentildeal de correccioacuten diferencial 39
313- El procesador 41
314- La unidad de visualizacioacuten 41
4- Construccioacuten de un prototipo de bajo coste 49
41- CPU de LEGO 53
42- Sensores dGPS de Dexter Industries 54
43- Piezas varias de LEGO 58
44- El programa 59
5- Costes 62
6- Conclusiones 65
7 Anexos 67
71- Folleto del girocompaacutes GC85 de Simrad 67
72- Folleto del compas satelitario SC-110 de Furuno 69
8- Fuentes de informacioacuten 74
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
3
1- Introduccioacuten
Este trabajo de fin de carrera de los estudios de Licenciatura en Naacuteutica y Transporte
mariacutetimo versa sobre un dispositivo de medicioacuten de rumbo de reciente aparicioacuten
denominado Compaacutes Satelitario Como veremos a lo largo del mismo la tecnologiacutea
utilizada por este dispositivo ndash el GPS- en modo alguno puede considerarse novedosa
aunque siacute lo es el uso que se le ha dado Por ese motivo considero mucho maacutes
apropiada su denominacioacuten inglesa GPS Compass
El trabajo consta de los siguientes apartados
Introduccioacuten
Evolucioacuten de los equipos de medicioacuten de rumbo
El compaacutes satelitario
Construccioacuten de un prototipo de bajo coste
Conclusiones
Fuentes de informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
4
2- Evolucioacuten de los equipos de medicioacuten de rumbo
21- Queacute es el rumbo
Empezaremos por definir lo que se entiende por rumbo obviamente dentro del
mundo de la naacuteutica Seriacutea absurdo pretender inventar una nueva definicioacuten para un
concepto tan conocido por los navegantes por lo que reproducimos lo que puede
encontrarse en cualquier libro de naacuteutica
En navegacioacuten se define el rumbo como el aacutengulo medido en el plano horizontal
entre el norte y la direccioacuten de avance del barco medido en ciacuterculo es decir de 0ordm a
360ordm
El rumbo se expresa siempre con tres diacutegitos y si es necesario se antildeaden ceros a la
izquierda Asiacute al decir rumbo 028ordm se evitan errores de interpretacioacuten evitando la
confusioacuten con rumbo 128ordm o 228ordm
Anteriormente el rumbo se expresaba en cuadrantal por referencia a un cuadrante
de la rosa naacuteutica rumbo S 30ordm E significa 30 grados hacia el este contados desde el
sur lo que equivale a rumbo circular 150ordm Hoy en diacutea este formato no es el utilizado
habitualmente en la marina mercante
En la propia definicioacuten se incluye un concepto que requiere un breve anaacutelisis puesto
que como veremos de eacutel se derivan diferentes tipos de rumbo Nos referimos al
ldquoNorterdquo el cual tambieacuten encontramos profusamente definido en libros de navegacioacuten
El norte es el punto cardinal que indica sobre un meridiano la direccioacuten al Polo
Norte
Se trata por lo tanto de uno de los cuatro puntos cardinales y estaacute situado
diametralmente opuesto al Polo Sur En el hemisferio norte se corresponde con el
punto del horizonte cuya perpendicular pasa aproximadamente por la Estrella Polar
No obstante el primer elemento utilizado para medir rumbos fue el compaacutes o aguja
magneacutetica la cual se orienta hacia el norte magneacutetico que no tiene porqueacute coincidir
con el polo norte motivo por el cual ya tenemos dos posibles adjetivos para este
Norte
Norte verdadero
Es el que se corresponde con el Polo Norte geograacutefico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
5
Norte magneacutetico
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula que no tiene
porqueacute coincidir con la del Polo Norte geograacutefico Es diferente en cada zona del
planeta y la diferencia entre el norte verdadero y este se conoce como
declinacioacuten magneacutetica Por otro lado se ha de tener en cuenta que dado que el
campo magneacutetico terrestre es generado por el nuacutecleo de ferrita existente en en
interior de la Tierra y que dicho nuacutecleo gira ldquolibrementerdquo con respecto a ella el
norte magneacutetico variacutea su posicioacuten (aunque a efectos praacutecticos se considera que
cambia cada antildeo)
Por otro lado el compaacutes o aguja magneacutetica instalada a bordo de un buque se
encuentra afectado por los elementos metaacutelicos del mismo lo que genera un desviacuteo
que depende del rumbo del buque y que podemos conocer a traveacutes de la ldquotablilla de
desviacuteosrdquo Esto genera un tercer posible adjetivo para el teacutermino Norte
Norte de aguja
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula instalada a bordo
de un buque y que no tiene porqueacute coincidir con el norte magneacutetico
Esta seriacutea la representacioacuten graacutefica de los tres tipos de norte que hemos comentado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
6
Asiacute pues dado que en la definicioacuten de rumbo nos referimos a ldquoaacutengulo formado entre el
norte y la direccioacuten de avancerdquo nos aparecen nuevos conceptos en base que hagamos
referencia al norte verdadero magneacutetico o de aguja
Rumbo verdadero
Es el aacutengulo formado entre el norte verdadero y la direccioacuten del buque Es el
rumbo que podemos medir en las cartas o mediante equipos que no se vean
afectados ni por la declinacioacuten magneacutetica ni por el desviacuteo de aguja
Rumbo magneacutetico
Es el aacutengulo formado entre el norte magneacutetico y la direccioacuten del buque
Rumbo de aguja
Es el aacutengulo formado entre el norte de aguja y la direccioacuten del buque Es el
utilizado por el timonel cuando gobierna haciendo uso de la aguja
Esta seriacutea la representacioacuten graacutefica de los tres tipos de rumbo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
3
1- Introduccioacuten
Este trabajo de fin de carrera de los estudios de Licenciatura en Naacuteutica y Transporte
mariacutetimo versa sobre un dispositivo de medicioacuten de rumbo de reciente aparicioacuten
denominado Compaacutes Satelitario Como veremos a lo largo del mismo la tecnologiacutea
utilizada por este dispositivo ndash el GPS- en modo alguno puede considerarse novedosa
aunque siacute lo es el uso que se le ha dado Por ese motivo considero mucho maacutes
apropiada su denominacioacuten inglesa GPS Compass
El trabajo consta de los siguientes apartados
Introduccioacuten
Evolucioacuten de los equipos de medicioacuten de rumbo
El compaacutes satelitario
Construccioacuten de un prototipo de bajo coste
Conclusiones
Fuentes de informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
4
2- Evolucioacuten de los equipos de medicioacuten de rumbo
21- Queacute es el rumbo
Empezaremos por definir lo que se entiende por rumbo obviamente dentro del
mundo de la naacuteutica Seriacutea absurdo pretender inventar una nueva definicioacuten para un
concepto tan conocido por los navegantes por lo que reproducimos lo que puede
encontrarse en cualquier libro de naacuteutica
En navegacioacuten se define el rumbo como el aacutengulo medido en el plano horizontal
entre el norte y la direccioacuten de avance del barco medido en ciacuterculo es decir de 0ordm a
360ordm
El rumbo se expresa siempre con tres diacutegitos y si es necesario se antildeaden ceros a la
izquierda Asiacute al decir rumbo 028ordm se evitan errores de interpretacioacuten evitando la
confusioacuten con rumbo 128ordm o 228ordm
Anteriormente el rumbo se expresaba en cuadrantal por referencia a un cuadrante
de la rosa naacuteutica rumbo S 30ordm E significa 30 grados hacia el este contados desde el
sur lo que equivale a rumbo circular 150ordm Hoy en diacutea este formato no es el utilizado
habitualmente en la marina mercante
En la propia definicioacuten se incluye un concepto que requiere un breve anaacutelisis puesto
que como veremos de eacutel se derivan diferentes tipos de rumbo Nos referimos al
ldquoNorterdquo el cual tambieacuten encontramos profusamente definido en libros de navegacioacuten
El norte es el punto cardinal que indica sobre un meridiano la direccioacuten al Polo
Norte
Se trata por lo tanto de uno de los cuatro puntos cardinales y estaacute situado
diametralmente opuesto al Polo Sur En el hemisferio norte se corresponde con el
punto del horizonte cuya perpendicular pasa aproximadamente por la Estrella Polar
No obstante el primer elemento utilizado para medir rumbos fue el compaacutes o aguja
magneacutetica la cual se orienta hacia el norte magneacutetico que no tiene porqueacute coincidir
con el polo norte motivo por el cual ya tenemos dos posibles adjetivos para este
Norte
Norte verdadero
Es el que se corresponde con el Polo Norte geograacutefico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
5
Norte magneacutetico
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula que no tiene
porqueacute coincidir con la del Polo Norte geograacutefico Es diferente en cada zona del
planeta y la diferencia entre el norte verdadero y este se conoce como
declinacioacuten magneacutetica Por otro lado se ha de tener en cuenta que dado que el
campo magneacutetico terrestre es generado por el nuacutecleo de ferrita existente en en
interior de la Tierra y que dicho nuacutecleo gira ldquolibrementerdquo con respecto a ella el
norte magneacutetico variacutea su posicioacuten (aunque a efectos praacutecticos se considera que
cambia cada antildeo)
Por otro lado el compaacutes o aguja magneacutetica instalada a bordo de un buque se
encuentra afectado por los elementos metaacutelicos del mismo lo que genera un desviacuteo
que depende del rumbo del buque y que podemos conocer a traveacutes de la ldquotablilla de
desviacuteosrdquo Esto genera un tercer posible adjetivo para el teacutermino Norte
Norte de aguja
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula instalada a bordo
de un buque y que no tiene porqueacute coincidir con el norte magneacutetico
Esta seriacutea la representacioacuten graacutefica de los tres tipos de norte que hemos comentado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
6
Asiacute pues dado que en la definicioacuten de rumbo nos referimos a ldquoaacutengulo formado entre el
norte y la direccioacuten de avancerdquo nos aparecen nuevos conceptos en base que hagamos
referencia al norte verdadero magneacutetico o de aguja
Rumbo verdadero
Es el aacutengulo formado entre el norte verdadero y la direccioacuten del buque Es el
rumbo que podemos medir en las cartas o mediante equipos que no se vean
afectados ni por la declinacioacuten magneacutetica ni por el desviacuteo de aguja
Rumbo magneacutetico
Es el aacutengulo formado entre el norte magneacutetico y la direccioacuten del buque
Rumbo de aguja
Es el aacutengulo formado entre el norte de aguja y la direccioacuten del buque Es el
utilizado por el timonel cuando gobierna haciendo uso de la aguja
Esta seriacutea la representacioacuten graacutefica de los tres tipos de rumbo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
4
2- Evolucioacuten de los equipos de medicioacuten de rumbo
21- Queacute es el rumbo
Empezaremos por definir lo que se entiende por rumbo obviamente dentro del
mundo de la naacuteutica Seriacutea absurdo pretender inventar una nueva definicioacuten para un
concepto tan conocido por los navegantes por lo que reproducimos lo que puede
encontrarse en cualquier libro de naacuteutica
En navegacioacuten se define el rumbo como el aacutengulo medido en el plano horizontal
entre el norte y la direccioacuten de avance del barco medido en ciacuterculo es decir de 0ordm a
360ordm
El rumbo se expresa siempre con tres diacutegitos y si es necesario se antildeaden ceros a la
izquierda Asiacute al decir rumbo 028ordm se evitan errores de interpretacioacuten evitando la
confusioacuten con rumbo 128ordm o 228ordm
Anteriormente el rumbo se expresaba en cuadrantal por referencia a un cuadrante
de la rosa naacuteutica rumbo S 30ordm E significa 30 grados hacia el este contados desde el
sur lo que equivale a rumbo circular 150ordm Hoy en diacutea este formato no es el utilizado
habitualmente en la marina mercante
En la propia definicioacuten se incluye un concepto que requiere un breve anaacutelisis puesto
que como veremos de eacutel se derivan diferentes tipos de rumbo Nos referimos al
ldquoNorterdquo el cual tambieacuten encontramos profusamente definido en libros de navegacioacuten
El norte es el punto cardinal que indica sobre un meridiano la direccioacuten al Polo
Norte
Se trata por lo tanto de uno de los cuatro puntos cardinales y estaacute situado
diametralmente opuesto al Polo Sur En el hemisferio norte se corresponde con el
punto del horizonte cuya perpendicular pasa aproximadamente por la Estrella Polar
No obstante el primer elemento utilizado para medir rumbos fue el compaacutes o aguja
magneacutetica la cual se orienta hacia el norte magneacutetico que no tiene porqueacute coincidir
con el polo norte motivo por el cual ya tenemos dos posibles adjetivos para este
Norte
Norte verdadero
Es el que se corresponde con el Polo Norte geograacutefico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
5
Norte magneacutetico
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula que no tiene
porqueacute coincidir con la del Polo Norte geograacutefico Es diferente en cada zona del
planeta y la diferencia entre el norte verdadero y este se conoce como
declinacioacuten magneacutetica Por otro lado se ha de tener en cuenta que dado que el
campo magneacutetico terrestre es generado por el nuacutecleo de ferrita existente en en
interior de la Tierra y que dicho nuacutecleo gira ldquolibrementerdquo con respecto a ella el
norte magneacutetico variacutea su posicioacuten (aunque a efectos praacutecticos se considera que
cambia cada antildeo)
Por otro lado el compaacutes o aguja magneacutetica instalada a bordo de un buque se
encuentra afectado por los elementos metaacutelicos del mismo lo que genera un desviacuteo
que depende del rumbo del buque y que podemos conocer a traveacutes de la ldquotablilla de
desviacuteosrdquo Esto genera un tercer posible adjetivo para el teacutermino Norte
Norte de aguja
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula instalada a bordo
de un buque y que no tiene porqueacute coincidir con el norte magneacutetico
Esta seriacutea la representacioacuten graacutefica de los tres tipos de norte que hemos comentado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
6
Asiacute pues dado que en la definicioacuten de rumbo nos referimos a ldquoaacutengulo formado entre el
norte y la direccioacuten de avancerdquo nos aparecen nuevos conceptos en base que hagamos
referencia al norte verdadero magneacutetico o de aguja
Rumbo verdadero
Es el aacutengulo formado entre el norte verdadero y la direccioacuten del buque Es el
rumbo que podemos medir en las cartas o mediante equipos que no se vean
afectados ni por la declinacioacuten magneacutetica ni por el desviacuteo de aguja
Rumbo magneacutetico
Es el aacutengulo formado entre el norte magneacutetico y la direccioacuten del buque
Rumbo de aguja
Es el aacutengulo formado entre el norte de aguja y la direccioacuten del buque Es el
utilizado por el timonel cuando gobierna haciendo uso de la aguja
Esta seriacutea la representacioacuten graacutefica de los tres tipos de rumbo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
5
Norte magneacutetico
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula que no tiene
porqueacute coincidir con la del Polo Norte geograacutefico Es diferente en cada zona del
planeta y la diferencia entre el norte verdadero y este se conoce como
declinacioacuten magneacutetica Por otro lado se ha de tener en cuenta que dado que el
campo magneacutetico terrestre es generado por el nuacutecleo de ferrita existente en en
interior de la Tierra y que dicho nuacutecleo gira ldquolibrementerdquo con respecto a ella el
norte magneacutetico variacutea su posicioacuten (aunque a efectos praacutecticos se considera que
cambia cada antildeo)
Por otro lado el compaacutes o aguja magneacutetica instalada a bordo de un buque se
encuentra afectado por los elementos metaacutelicos del mismo lo que genera un desviacuteo
que depende del rumbo del buque y que podemos conocer a traveacutes de la ldquotablilla de
desviacuteosrdquo Esto genera un tercer posible adjetivo para el teacutermino Norte
Norte de aguja
Es la direccioacuten que sentildeala la aguja imantada de una bruacutejula instalada a bordo
de un buque y que no tiene porqueacute coincidir con el norte magneacutetico
Esta seriacutea la representacioacuten graacutefica de los tres tipos de norte que hemos comentado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
6
Asiacute pues dado que en la definicioacuten de rumbo nos referimos a ldquoaacutengulo formado entre el
norte y la direccioacuten de avancerdquo nos aparecen nuevos conceptos en base que hagamos
referencia al norte verdadero magneacutetico o de aguja
Rumbo verdadero
Es el aacutengulo formado entre el norte verdadero y la direccioacuten del buque Es el
rumbo que podemos medir en las cartas o mediante equipos que no se vean
afectados ni por la declinacioacuten magneacutetica ni por el desviacuteo de aguja
Rumbo magneacutetico
Es el aacutengulo formado entre el norte magneacutetico y la direccioacuten del buque
Rumbo de aguja
Es el aacutengulo formado entre el norte de aguja y la direccioacuten del buque Es el
utilizado por el timonel cuando gobierna haciendo uso de la aguja
Esta seriacutea la representacioacuten graacutefica de los tres tipos de rumbo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
6
Asiacute pues dado que en la definicioacuten de rumbo nos referimos a ldquoaacutengulo formado entre el
norte y la direccioacuten de avancerdquo nos aparecen nuevos conceptos en base que hagamos
referencia al norte verdadero magneacutetico o de aguja
Rumbo verdadero
Es el aacutengulo formado entre el norte verdadero y la direccioacuten del buque Es el
rumbo que podemos medir en las cartas o mediante equipos que no se vean
afectados ni por la declinacioacuten magneacutetica ni por el desviacuteo de aguja
Rumbo magneacutetico
Es el aacutengulo formado entre el norte magneacutetico y la direccioacuten del buque
Rumbo de aguja
Es el aacutengulo formado entre el norte de aguja y la direccioacuten del buque Es el
utilizado por el timonel cuando gobierna haciendo uso de la aguja
Esta seriacutea la representacioacuten graacutefica de los tres tipos de rumbo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
7
Vamos a ver seguidamente los equipos utilizados para medir este rumbo y la evolucioacuten
que han tenido
22- Equipos de medicioacuten del rumbo
Entre los diferentes equipos de medicioacuten de rumbo podemos citar
El compaacutes magneacutetico
El girocompaacutes
El GPS
El Compaacutes fluxgate
El compaacutes satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
8
221- El compaacutes magneacutetico Un compaacutes es el nombre geneacuterico que recibe el instrumento empleado para
determinar direcciones a bordo de un barco Su funcionamiento se basa en la bruacutejula
por lo que empezaremos por hablar de este elemento
La bruacutejula es un instrumento que sirve para orientarse en relacioacuten al norte y que tiene su fundamento en la propiedad de las agujas magnetizadas Por medio de una aguja imantada sentildeala el Norte magneacutetico el cual como ya vimos es diferente para cada zona del planeta y distinto del Norte geograacutefico Utiliza como medio de funcionamiento el magnetismo terrestre La aguja imantada indica la direccioacuten del campo magneacutetico terrestre apuntando hacia los polos norte y sur
Como veremos maacutes adelante a lo largo de la historia han ido surgiendo sistemas de
navegacioacuten maacutes avanzados y completos (GPS) que brindan maacutes informacioacuten y
precisioacuten sin embargo la bruacutejula auacuten es muy popular en actividades que requieren
alta movilidad o que impiden debido a su naturaleza el acceso a energiacutea eleacutectrica de
la cual dependen los demaacutes sistemas
Antes de la creacioacuten de la bruacutejula la direccioacuten en mar abierto se determinaba con la
posicioacuten de los cuerpos celestes Algunas veces la navegacioacuten se apoyaba con el uso de
sondas para hacerse una idea de la proximidad de la costa Las dificultades principales
que se presentaban con el uso de estos meacutetodos eran las aguas demasiado profundas
para el uso de sondas y que muchas veces el cielo estaba demasiado nublado o el
clima era muy neblinoso La bruacutejula se usaba principalmente para paliar estos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
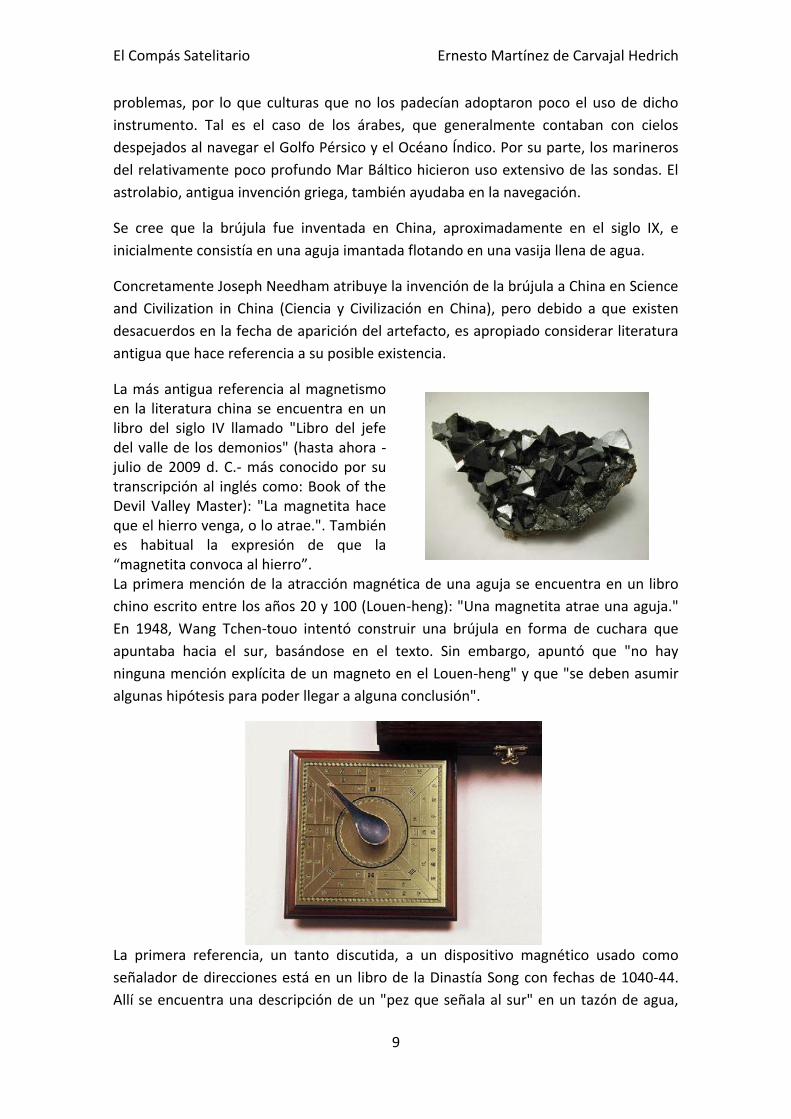
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
9
problemas por lo que culturas que no los padeciacutean adoptaron poco el uso de dicho
instrumento Tal es el caso de los aacuterabes que generalmente contaban con cielos
despejados al navegar el Golfo Peacutersico y el Oceacuteano Iacutendico Por su parte los marineros
del relativamente poco profundo Mar Baacuteltico hicieron uso extensivo de las sondas El
astrolabio antigua invencioacuten griega tambieacuten ayudaba en la navegacioacuten
Se cree que la bruacutejula fue inventada en China aproximadamente en el siglo IX e
inicialmente consistiacutea en una aguja imantada flotando en una vasija llena de agua
Concretamente Joseph Needham atribuye la invencioacuten de la bruacutejula a China en Science
and Civilization in China (Ciencia y Civilizacioacuten en China) pero debido a que existen
desacuerdos en la fecha de aparicioacuten del artefacto es apropiado considerar literatura
antigua que hace referencia a su posible existencia
La maacutes antigua referencia al magnetismo en la literatura china se encuentra en un libro del siglo IV llamado Libro del jefe del valle de los demonios (hasta ahora -julio de 2009 d C- maacutes conocido por su transcripcioacuten al ingleacutes como Book of the Devil Valley Master) La magnetita hace que el hierro venga o lo atrae Tambieacuten es habitual la expresioacuten de que la ldquomagnetita convoca al hierrordquo
La primera mencioacuten de la atraccioacuten magneacutetica de una aguja se encuentra en un libro
chino escrito entre los antildeos 20 y 100 (Louen-heng) Una magnetita atrae una aguja
En 1948 Wang Tchen-touo intentoacute construir una bruacutejula en forma de cuchara que
apuntaba hacia el sur basaacutendose en el texto Sin embargo apuntoacute que no hay
ninguna mencioacuten expliacutecita de un magneto en el Louen-heng y que se deben asumir
algunas hipoacutetesis para poder llegar a alguna conclusioacuten
La primera referencia un tanto discutida a un dispositivo magneacutetico usado como
sentildealador de direcciones estaacute en un libro de la Dinastiacutea Song con fechas de 1040-44
Alliacute se encuentra una descripcioacuten de un pez que sentildeala al sur en un tazoacuten de agua
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
10
que se alineaba a siacute mismo hacia el sur En el escrito el objeto se recomienda como
meacutetodo de orientacioacuten en la oscuridad de la noche No hay sin embargo ninguna
mencioacuten a su uso en navegacioacuten ni de coacutemo el pez fue magnetizado A este respecto
mencionar que es posible construir una especie de bruacutejula haciendo uso de una
tortuga dada la capacidad de esta de orientarse en el campo magneacutetico terrestre
La primera referencia indiscutible a una aguja magnetizada en escritos chinos aparece
en 10867 El ldquoEnsayo del tesoro de los suentildeosrdquo escrito por Shen Kuo de la dinastiacutea
Song conteniacutea una descripcioacuten detallada de coacutemo los geomantes magnetizaron una
aguja frotando su punta con magnetita y colgando la aguja magneacutetica con una fibra de
seda con un poco de cera pegada en el centro de la aguja Shen Kuo sentildealoacute que una
aguja preparada de este modo algunas veces apuntaba hacia el norte y otras hacia el
sur
Como curiosidad mencionar que las antiguas bruacutejulas chinas eran utilizadas en el
marco conjunto de la magia y de la ciencia y la protociencia ndash la ciencia especulativa-
por ejemplo la bruacutejula magneacutetica es un instrumento fundamental en la geomancia -
meacutetodo de adivinacioacuten que interpreta marcas en el suelo o cualquier patroacuten que se
forme a partir de arrojar un puntildeado de piedras arena o tierra- y el feng shui las
bruacutejulas chinas tradicionales para el feng shui en lugar de los puntos cardinales (N-E-S-
WOacute) suelen tener por marco los hexagramas binarios del I Ching es decir tales
bruacutejulas chinas estaacuten en el centro del diagrama llamado Pa Kua y el punto cardinal que
suelen utilizar de referencia es el Sur ya que para la tradicioacuten China el Norte era
nefasto (por el friacuteo se asociaba a la muerte) y por oposicioacuten el Sur era (como el Este)
fasto o bienaventurado (de alliacute consideraban que veniacutea el calor y con ello la vida)
Existe un gran debate acerca de queacute ocurrioacute con la bruacutejula tras su aparicioacuten en China y
la forma con la que se propagoacute por el resto del mundo Diferentes teoriacuteas incluyen
Viaje de la bruacutejula desde China hasta el Medio Este a traveacutes de la Ruta de la
Seda y luego a Europa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
11
Transferencia directa de la bruacutejula de China a Europa y luego de Europa al
Medio Este
Creacioacuten independiente de la bruacutejula en Europa y luego paso de eacutesta al Medio
Este
Las dos uacuteltimas teoriacuteas se basan en evidencias de aparicioacuten de la bruacutejula en trabajos
europeos antes que en araacutebigos La primera mencioacuten europea de una aguja
magnetizada y su uso entre marineros ocurre en ldquoDe naturis rerumrdquo (Las cosas
naturales) de Alexander Neckam probablemente escrito en Pariacutes en 1190 Otra
evidencia para esto incluye la palabra aacuterabe para bruacutejula (al-konbas) similar al
kompass o compass de las lenguas germaacutenicas posiblemente derivada de la palabra
italiana compasso por la forma circular de la caja de la bruacutejula
En el mundo aacuterabe la maacutes temprana referencia al dispositivo se encuentra en El libro
tesaurus de los mercaderes (conocido por su transcripcioacuten al ingleacutes como The Book
of the Merchants Treasure) escrito en aacuterabe por Baylak al-Kibjaki en El Cairo en 1282
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
12
Extraiacutedo del libro ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G Schmidl
Dado que el autor describe haber presenciado el uso de una bruacutejula en un viaje en
barco 40 antildeos antes algunos eruditos se inclinan a anteceder la posible fecha de
aparicioacuten del objeto consecuentemente Tambieacuten hay una mencioacuten musulmana a una
bruacutejula con forma de pez de hierro en un libro persa de 1232
En Europa la bruacutejula o compaacutes magneacutetico es oficialmente conocida desde el
Renacimiento inicialmente se creyoacute que obraba por brujeriacutea de alliacute su nombre maacutes
comuacuten que es un diminutivo de bruja desde fines de la Edad Media y hasta
aproximadamente mediados del siglo XIX se creyoacute que la aguja imantada apuntaba
hacia el Polo Norte y se creiacutea que esto ocurriacutea porque -se suponiacutea- existiacutea en el Polo
Norte una gigantesca montantildea de hierro o de magnetita en medio de una isla
(imaginaria) a la que se llamoacute Rupes Nigra Lo maacutes curioso es que seguacuten parece esta
creencia supersticiosa logroacute una gran difusioacuten a pesar de que aparecioacute en un libro
titulado ldquoInventio Fortunatardquo de autoriacutea incierto lo que demuestra que los bulos ya
lograban en aquellos remotos antildeos una gran notoriedad aun careciendo de Internet
La bruacutejula seca fue inventada en Europa alrededor del antildeo 1300 Este artilugio consta
de tres elementos una aguja magnetizada una caja con cubierta de vidrio y una carta
naacuteutica con la rosa de los vientos dibujada en una de sus caras La carta se adheriacutea en
la aguja que a su vez se encontraba sobre un eje de forma que podiacutea rotar libremente
Como la bruacutejula se poniacutea en liacutenea con la quilla del barco y la carta giraba siempre que
el barco cambiaba de direccioacuten el aparato indicaba en todo momento el rumbo que
llevaba el barco A pesar de que el sistema de agujas en cajas ya habiacutea sido descrito por
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
13
el erudito franceacutes Peter Peregrinus en 1269 fue el italiano Flavio Gioja piloto marino
originario de Amalfi quien perfeccionoacute la bruacutejula de navegacioacuten suspendiendo la aguja
sobre la carta naacuteutica daacutendole al aparato su apariencia familiar Ese modelo de
bruacutejula con la aguja atada a una tarjeta rotatoria tambieacuten se describe en un
comentario de la Divina Comedia de Dante (1380) y en otra fuente se habla de una
bruacutejula portaacutetil en una caja (1318) soportando la nocioacuten de que la bruacutejula seca era
conocida en Europa por esa eacutepoca
Monumento a Flavio Giogia en Amalfi (Italia)
Volviendo al mundo de la naacuteutica dejamos la bruacutejula en su espacio natural la tierra
para seguir hablando del compaacutes
El primer escrito que hace alusioacuten al uso de una aguja magnetizada en navegacioacuten es el
libro ldquoCharlas de la mesa de Pingzhourdquo (por ahora maacutes conocido fuera de China por su
transliteracioacuten al ingleacutes como Pingzhou Table Talks de Zhu Yu con fecha del antildeo 1117
El navegante conoce la geografiacutea eacutel observa las estrellas en la noche observa el sol
en el diacutea cuando estaacute oscuro y nublado eacutel observa la bruacutejula Esto por supuesto
habriacutea recibido una valiosa ayuda del descubrimiento de Shen Kuo del concepto del
norte verdadero la declinacioacuten magneacutetica hacia el polo norte magneacutetico
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
14
El primer uso de una bruacutejula de navegacioacuten de 48 posiciones en el mar estaacute mencionado en un libro titulado Las aduanas de Camboya escrito por Zhou Daguan diplomaacutetico de la dinastiacutea Yuan En este libro se describe su viaje en 1296 desde Wenzhou hasta Angkor Thom donde un marinero tomoacute una direccioacuten de la aguja de ding wei equivalente a 225deg SO Luego de arribar en Baria el marinero tomoacute un dato de la Aguja (bruacutejula) de Kun Shen o 525deg SO8
El mapa de navegacioacuten de Zheng He tambieacuten conocido como el Mapa Mao Kun
contiene una gran cantidad de tomas de valores de aguja de los viajes de Zheng He
En la Biblioteca Bodleiana tienen un manual de instrucciones titulado Shun Feng Xiang
Song (Vientos propicios -o justos- para compantildeiacutea) que contiene gran detalle acerca del
uso de la bruacutejula de navegacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
15
Siguiendo con la evolucioacuten histoacuterica de la bruacutejula maacutes adelante fue mejorada para reducir su tamantildeo e incrementar su practicidad cambiaacutendose la vasija de agua por un eje rotatorio y antildeadieacutendose una rosa de los vientos que sirve de guiacutea para calcular direcciones Actualmente las bruacutejulas han recibido pequentildeas mejoras que si bien no cambian su sistema de funcionamiento hacen maacutes sencillas las mediciones a realizar Entre estas mejoras se encuentran sistemas de iluminacioacuten para toma de datos en entornos oscuros y visores para mediciones en las que las referencias son objetos situados en la lejaniacutea
Centraacutendonos en el mundo de la naacuteutica la normativa actual exige disponer de este
elemento a bordo a pesar de que en la realidad no es el elemento utilizado realmente
para conocer y seguir un rumbo
En el antildeo 2010 la Universidad del Paiacutes Vasco patentoacute una bruacutejula virtual capaz de corregir el rumbo en tiempo real Un anaacutelisis de dicha patente evidencia que el funcionamiento de esta bruacutejula virtual se basa en procesar la informacioacuten recibida de los diferentes equipos de abordo y aplicar valores de correccioacuten obtenidos de la tablilla de desviacuteos del buque asiacute como la declinacioacuten magneacutetica de la zona
Desde mi humilde punto de vista considero que esta patente solo tiene cierto intereacutes
como ejercicio acadeacutemico pero no es en absoluto fiable ya que no es capaz de
adaptarse a cambios que puedan originarse por ejemplo en el magnetismo del buque
Por otro lado requiere alimentarse de un GPS para conocer la zona de navegacioacuten y
ya puestos a utilizar esta tecnologiacutea es mucho mejor hacerlo de forma maacutes eficaz
como lo hace el compaacutes satelitario
222- Bitaacutecora La bitaacutecora en siacute es un armario por lo general de forma ciliacutendrica o prismaacutetica que esta
fijo a la cubierta de una embarcacioacuten junto a la rueda del timoacuten y en la que va
montada la aguja naacuteutica mediante suspensioacuten Cardaacuten a fin de que siempre se
mantenga horizontal a pesar de los balances y cabezadas del buque En su interior se
colocan imanes y en el exterior dos esferas de hierro dulce para anular la accioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
16
perturbadora producida por los hierros de a bordo y hacer uniforme el campo
magneacutetico que rodea a la aguja con objeto de lograr que en todo momento sentildeale el
norte magneacutetico o al menos se desviacutee lo menos posible de este
Antiguamente cuando los buques careciacutean de puente de mando cubierto soliacutea
guardarse en el interior de la bitaacutecora el llamado cuaderno de bitaacutecora para
preservarlo de las inclemencias del tiempo Aunque el nombre se ha popularizado en
los uacuteltimos antildeos a raiacutez de su utilizacioacuten en diferentes aacutembitos el cuaderno de trabajo o
bitaacutecora ha sido utilizado desde siempre
No deja de ser llamativo que hoy en diacutea y a pesar de la evolucioacuten exponencial de la
tecnologiacutea se sigan utilizando estos arcaicos artefactos que ademaacutes por ley deben ser
calibrados perioacutedicamente mediante expertos llamados ldquoCompensadores de agujasrdquo
sin duda una profesioacuten que seguacuten mi humilde entender tiene los diacuteas contados
222- El girocompaacutes Un girocompaacutes es un dispositivo que mira siempre al Norte geograacutefico usando un
juego de discos o anillos que mediante motores giran a alta velocidad y las fuerzas de
friccioacuten para aprovechar la rotacioacuten de la Tierra No basan su funcionamiento por lo
tanto en el magnetismo terrestre por lo que estaacuten libres de los problemas que de ello
se derivan aunque tiene otros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
17
Los girocompases se usan ampliamente en los barcos Tienen dos ventajas principales
sobre las bruacutejulas magneacuteticas
Sentildealan al norte geograacutefico es decir la direccioacuten del eje de rotacioacuten de la
Tierra y no al norte magneacutetico
No se ven afectados por el metal del casco de los barcos
Un girocompaacutes es esencialmente un giroacutescopo una rueda girando montada de forma que su eje queda libre para orientarse en cualquier direccioacuten Basa por lo tanto su funcionamiento en el mismo efecto que la sencilla peonza pero como veremos los utilizados en los buques son extremadamente complejos y por lo tanto caros de comprar instalar y mantener
Supongamos que la rueda gira con su eje sentildealando en alguna direccioacuten diferente a la
de la Estrella Polar Debido a la ley de conservacioacuten del momento angular una rueda
en esta situacioacuten mantendraacute su orientacioacuten original Dado que la Tierra rota para un
observador estacionario sobre la Tierra pareceraacute que el eje del giroacutescopo rota una vez
cada 24 horas Un giroacutescopo rotando de esta forma no puede usarse en navegacioacuten El
ingrediente adicional crucial necesario para un girocompaacutes es alguacuten mecanismo que
aplique un par de giro cuando el eje del giroacutescopo no sentildeale al norte
Un de los meacutetodos para lograr esto usa friccioacuten para aplicar el par necesario el
giroacutescopo del girocompaacutes no es por tanto totalmente libre para reorientarse por siacute
mismo Si por ejemplo un dispositivo conectado al eje se sumerge en un fluido viscoso
entonces dicho fluido se resistiraacute a la reorientacioacuten del eje Esta fuerza de friccioacuten
provocada por el fluido resulta en un par de giro actuando sobre el eje provocando
que eacuteste gire en una direccioacuten ortogonal al par (es decir precedente) hacia el norte
geograacutefico (la Estrella Polar) Una vez que el eje apunte hacia el norte pareceraacute
estacionario y no experimentaraacute ninguna fuerza de friccioacuten maacutes Esto se debe a que el
norte geograacutefico es la uacutenica direccioacuten para la que el giroacutescopo puede permanecer
sobre la superficie de la Tierra sin ser forzado a cambiar Se considera que eacuteste es un
punto de energiacutea potencial miacutenima
El otro de los meacutetodos sin duda maacutes praacutectico utiliza pesos para forzar al eje del
giroacutescopo a permanecer horizontal con respecto a la superficie de la Tierra pero
permitirle rotar libremente dentro de ese plano En este caso la gravedad aplicaraacute un
par de giro obligando al eje del giroacutescopo a orientarse hacia el norte Debido a que los
pesos confinaraacuten al eje a estar horizontal respecto a la superficie de la Tierra eacuteste
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
18
nunca puede alinearse con el eje del planeta (excepto en el Ecuador) y debe
realinearse a medida que la tierra rota Pero con respecto a la superficie terrestre el
giroacutescopo pareceraacute estar estacionario y sentildealando junto a la superficie terrestre hacia
el polo norte geograacutefico
Dado que el funcionamiento de un girocompaacutes depende crucialmente de su rotacioacuten
sobre la Tierra no funcionaraacute correctamente si el buque en el que estaacute montado se
mueve raacutepidamente especialmente en la direccioacuten este a oeste
Posee dos ventajas sobre el compaacutes magneacutetico
Sentildeala la direccioacuten del norte verdadero en oposicioacuten al norte magneacutetico
indicado por la bruacutejula
No se ve afectado por la estructura del buque No posee desviacuteo por tanto si
bien posee un pequentildeo error este es constante a todo rumbo
Estas ventajas permiten la aplicacioacuten del girocompaacutes no solo en el mundo de la
naacuteutica Por ejemplo es de gran utilidad en la mineriacutea donde instrumentos como el
GPS o la bruacutejula no seriacutean uacutetiles debido a la dificultad en la recepcioacuten en GPS o a la
poca fiabilidad de la bruacutejula debido a la presencia de vetas metaacutelicas
Por el contrario tiene tambieacuten algunos inconvenientes
Requiere de una fuente constante de energiacutea
Su consumo eleacutectrico es elevado (70 W 140 durante la puesta en marcha)
Su tiempo de puesta en marcha es elevado (desde 05 hasta 4 horas)
Su coste de compra es elevado
Su coste de instalacioacuten tambieacuten es elevado
Requiere un mantenimiento perioacutedico que tambieacuten es costoso
Es importante recalcar que tal como se indica el tiempo de puesta en marcha puede
oscilar desde la media hora hasta las cuatro horas hasta que el compaacutes se estabiliza
algo a tener muy en cuenta
Asiacute mismo es de destacar su consumo eleacutectrico de 70 watios a la hora (140 durante la
puesta en marcha) algo a tener en cuenta a bordo de los buques no solo por lo que
respecta al aporte de energiacutea si no por el hecho de que es un elemento que genera
mucho calor (y bastante ruido)
El girocompaacutes fue patentado en 1885 por el holandeacutes Martinus Gerardus van den Bos
si bien su disentildeo nunca funcionoacute adecuadamente Debe ser muy frustrante tener una
idea pero no lograr que acabe de funcionar correctamente
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
19
En 1889 el capitaacuten Arthur Krebs disentildeoacute un giroacutescopo pendular eleacutectrico para el
submarino experimental franceacutes Gymnote que le permitiriacutea forzar un bloqueo naval
en 1890
En 1903 el alemaacuten Herman Anschuumltz-Kaempfe construyoacute un girocompaacutes que
funcionaba y obtuvo una patente sobre su disentildeo
Herman Anschuumltz-Kaempfe Su girocompaacutes
En 1908 Anschuumltz-Kaempfe y el inventor estadounidense Elmer Ambrose Sperry
patentaron el girocompaacutes en Gran Bretantildea y los Estados Unidos Cuando Sperry
intentoacute vender este dispositivo a la armada alemana en 1914 Anschuumltz-Kaempfe le
denuncioacute por violacioacuten de patente Sperry argumentoacute que la patente de Anschuumltz-
Kaempfe no era vaacutelida debido a que no mejoraba significativamente la anterior
patente de van den Bos Se concluyoacute que Sperry la habiacutea infringido al usar un meacutetodo
especiacutefico de amortiguamiento Anschuumltz-Kaempfe ganoacute el caso en 1915
223- El GPS Siguiendo con la evolucioacuten tecnoloacutegica llegamos al GPS (Global Positioning System
sistema de posicionamiento global) o NAVSTAR-GPS1 el cual es un sistema global de
navegacioacuten por sateacutelite (GNSS) que permite determinar en todo el mundo la posicioacuten
de un objeto una persona o un vehiacuteculo con una precisioacuten hasta de centiacutemetros (si se
utiliza GPS diferencial) aunque lo habitual son unos pocos metros de precisioacuten El
sistema fue desarrollado instalado y actualmente operado por el Departamento de
Defensa de los Estados Unidos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
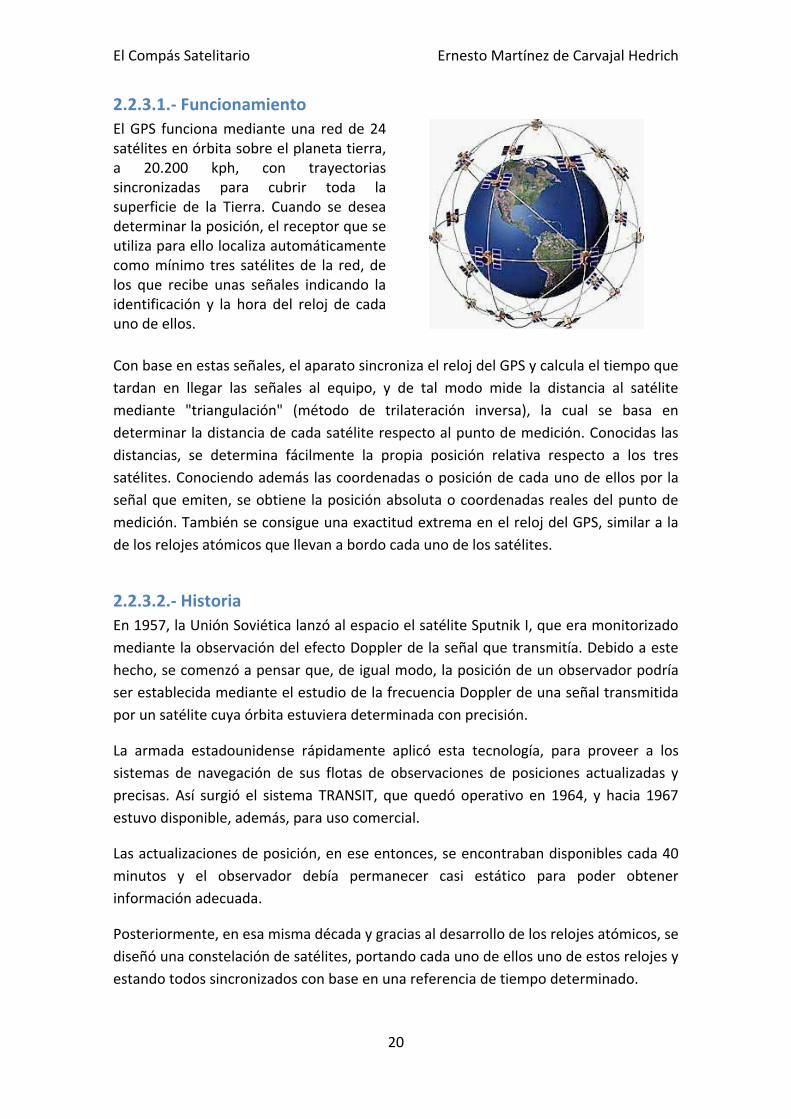
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
20
2231- Funcionamiento
El GPS funciona mediante una red de 24 sateacutelites en oacuterbita sobre el planeta tierra a 20200 kph con trayectorias sincronizadas para cubrir toda la superficie de la Tierra Cuando se desea determinar la posicioacuten el receptor que se utiliza para ello localiza automaacuteticamente como miacutenimo tres sateacutelites de la red de los que recibe unas sentildeales indicando la identificacioacuten y la hora del reloj de cada uno de ellos
Con base en estas sentildeales el aparato sincroniza el reloj del GPS y calcula el tiempo que
tardan en llegar las sentildeales al equipo y de tal modo mide la distancia al sateacutelite
mediante triangulacioacuten (meacutetodo de trilateracioacuten inversa) la cual se basa en
determinar la distancia de cada sateacutelite respecto al punto de medicioacuten Conocidas las
distancias se determina faacutecilmente la propia posicioacuten relativa respecto a los tres
sateacutelites Conociendo ademaacutes las coordenadas o posicioacuten de cada uno de ellos por la
sentildeal que emiten se obtiene la posicioacuten absoluta o coordenadas reales del punto de
medicioacuten Tambieacuten se consigue una exactitud extrema en el reloj del GPS similar a la
de los relojes atoacutemicos que llevan a bordo cada uno de los sateacutelites
2232- Historia
En 1957 la Unioacuten Sovieacutetica lanzoacute al espacio el sateacutelite Sputnik I que era monitorizado
mediante la observacioacuten del efecto Doppler de la sentildeal que transmitiacutea Debido a este
hecho se comenzoacute a pensar que de igual modo la posicioacuten de un observador podriacutea
ser establecida mediante el estudio de la frecuencia Doppler de una sentildeal transmitida
por un sateacutelite cuya oacuterbita estuviera determinada con precisioacuten
La armada estadounidense raacutepidamente aplicoacute esta tecnologiacutea para proveer a los
sistemas de navegacioacuten de sus flotas de observaciones de posiciones actualizadas y
precisas Asiacute surgioacute el sistema TRANSIT que quedoacute operativo en 1964 y hacia 1967
estuvo disponible ademaacutes para uso comercial
Las actualizaciones de posicioacuten en ese entonces se encontraban disponibles cada 40
minutos y el observador debiacutea permanecer casi estaacutetico para poder obtener
informacioacuten adecuada
Posteriormente en esa misma deacutecada y gracias al desarrollo de los relojes atoacutemicos se
disentildeoacute una constelacioacuten de sateacutelites portando cada uno de ellos uno de estos relojes y
estando todos sincronizados con base en una referencia de tiempo determinado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
21
En 1973 se combinaron los programas de la Armada y el de la Fuerza Aeacuterea de los
Estados Unidos (este uacuteltimo consistente en una teacutecnica de transmisioacuten codificada que
proveiacutea datos precisos usando una sentildeal modulada con un coacutedigo de PRN (Pseudo-
Random Noise ruido pseudo-aleatorio) en lo que se conocioacute como Navigation
Technology Program (programa de tecnologiacutea de navegacioacuten) posteriormente
renombrado como NAVSTAR GPS
Entre 1978 y 1985 se desarrollaron y lanzaron once sateacutelites prototipo experimentales
NAVSTAR a los que siguieron otras generaciones de sateacutelites hasta completar la
constelacioacuten actual a la que se declaroacute con laquocapacidad operacional inicialraquo en
diciembre de 1993 y con laquocapacidad operacional totalraquo en abril de 1995
En 2009 este paiacutes ofrecioacute el servicio normalizado de determinacioacuten de la posicioacuten para
apoyar las necesidades de la OACI y eacutesta aceptoacute el ofrecimiento
2233- El receptor GPS
La situacioacuten de los sateacutelites puede ser determinada de antemano por el receptor con la
informacioacuten del llamado almanaque (un conjunto de valores con 5 elementos
orbitales) paraacutemetros que son transmitidos por los propios sateacutelites La coleccioacuten de
los almanaques de toda la constelacioacuten se completa cada 12-20 minutos y se guarda en
el receptor GPS
La informacioacuten que es uacutetil al receptor GPS para determinar su posicioacuten se llama
efemeacuterides En este caso cada sateacutelite emite sus propias efemeacuterides en la que se
incluye la salud del sateacutelite (si debe o no ser considerado para la toma de la posicioacuten)
su posicioacuten en el espacio su hora atoacutemica informacioacuten doppler etc
El receptor GPS utiliza la informacioacuten enviada por los sateacutelites (hora en la que
emitieron las sentildeales localizacioacuten de los mismos) y trata de sincronizar su reloj interno
con el reloj atoacutemico que poseen los sateacutelites La sincronizacioacuten es un proceso de
prueba y error que en un receptor portaacutetil ocurre una vez cada segundo Una vez
sincronizado el reloj puede determinar su distancia hasta los sateacutelites y usa esa
informacioacuten para calcular su posicioacuten en la tierra
Cada sateacutelite indica que el receptor se encuentra en un punto en la superficie de la
esfera con centro en el propio sateacutelite y de radio la distancia total hasta el receptor
Obteniendo informacioacuten de dos sateacutelites se nos indica que el receptor se encuentra
sobre la circunferencia que resulta cuando se intersecan las dos esferas
Si adquirimos la misma informacioacuten de un tercer sateacutelite notamos que la nueva esfera
soacutelo corta la circunferencia anterior en dos puntos Uno de ellos se puede descartar
porque ofrece una posicioacuten absurda (por fuera del globo terraacutequeo sobre los
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
22
sateacutelites) De esta manera ya tendriacuteamos la posicioacuten en 3D Sin embargo dado que el
reloj que incorporan los receptores GPS no estaacute sincronizado con los relojes atoacutemicos
de los sateacutelites GPS los dos puntos determinados no son precisos
Teniendo informacioacuten de un cuarto sateacutelite eliminamos el inconveniente de la falta de
sincronizacioacuten entre los relojes de los receptores GPS y los relojes de los sateacutelites Y es
en este momento cuando el receptor GPS puede determinar una posicioacuten 3D exacta
(latitud longitud y altitud) Al no estar sincronizados los relojes entre el receptor y los
sateacutelites la interseccioacuten de las cuatro esferas con centro en estos sateacutelites es un
pequentildeo volumen en vez de ser un punto La correccioacuten consiste en ajustar la hora del
receptor de tal forma que este volumen se transforme en un punto
Debido al caraacutecter militar del sistema GPS el Departamento de Defensa de los EE UU
se reservaba la posibilidad de incluir un cierto grado de error aleatorio que podiacutea
variar de los 15 a los 100 m La llamada disponibilidad selectiva (SA) fue eliminada el 2
de mayo de 2000 Aunque actualmente no aplique tal error inducido la precisioacuten
intriacutenseca del sistema GPS depende del nuacutemero de sateacutelites visibles en un momento y
posicioacuten determinados
Con un elevado nuacutemero de sateacutelites siendo captados (7 8 oacute 9 sateacutelites) y si eacutestos
tienen una geometriacutea adecuada (estaacuten dispersos) pueden obtenerse precisiones
inferiores a 25 metros en el 95 del tiempo Si se activa el sistema DGPS llamado SBAS
(WAAS-EGNOS-MSAS) la precisioacuten mejora siendo inferior a un metro en el 97 de los
casos Estos sistemas SBAS no se aplican en Sudameacuterica ya que esa zona no cuenta
con este tipo de sateacutelites geoestacionarios
El DGPS (Differential GPS) o GPS diferencial es un sistema que proporciona a los
receptores de GPS correcciones de los datos recibidos de los sateacutelites GPS con el fin de
proporcionar una mayor precisioacuten en la posicioacuten calculada Se concibioacute
fundamentalmente debido la introduccioacuten de la disponibilidad selectiva (SA)
El fundamento radica en el hecho de que los errores producidos por el sistema GPS
afectan por igual (o de forma muy similar) a los receptores situados proacuteximos entre siacute
Los errores estaacuten fuertemente correlacionados en los receptores proacuteximos
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicioacuten
basaacutendose en otras teacutecnicas recibe la posicioacuten dada por el sistema GPS y puede
calcular los errores producidos por el sistema GPS comparaacutendola con la suya conocida
de antemano Este receptor transmite la correccioacuten de errores a los receptores
proacuteximos a eacutel y asiacute estos pueden a su vez corregir tambieacuten los errores producidos por
el sistema dentro del aacuterea de cobertura de transmisioacuten de sentildeales del equipo GPS de
referencia
En suma la estructura DGPS quedariacutea de la siguiente manera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
23
Estacioacuten monitorizada (referencia) que conoce su posicioacuten con una precisioacuten
muy alta Esta estacioacuten estaacute compuesta por Un receptor GPS
Un microprocesador para calcular los errores del sistema GPS y para generar la
estructura del mensaje que se enviacutea a los receptores
Transmisor para establecer un enlace de datos unidireccional hacia los
receptores de los usuarios finales
Equipo de usuario compuesto por un receptor DGPS (GPS + receptor del enlace
de datos desde la estacioacuten monitorizada)
Existen varias formas de obtener las correcciones DGPS Las maacutes usadas son
Recibidas por radio a traveacutes de alguacuten canal preparado para ello como el RDS
en una emisora de FM
Descargadas de Internet o con una conexioacuten inalaacutembrica
Proporcionadas por alguacuten sistema de sateacutelites disentildeado para tal efecto En
Estados Unidos existe el WAAS en Europa el EGNOS y en Japoacuten el MSAS todos
compatibles entre siacute
En los mensajes que se enviacutean a los receptores proacuteximos se pueden incluir dos tipos de
correcciones
Una correccioacuten directamente aplicada a la posicioacuten Esto tiene el inconveniente
de que tanto el usuario como la estacioacuten monitora deberaacuten emplear los
mismos sateacutelites pues las correcciones se basan en esos mismos sateacutelites
Una correccioacuten aplicada a las pseudodistancias de cada uno de los sateacutelites
visibles En este caso el usuario podraacute hacer la correccioacuten con los 4 sateacutelites de
mejor relacioacuten sentildeal-ruido (SN) Esta correccioacuten es maacutes flexible
El error producido por la disponibilidad selectiva (SA) variacutea incluso maacutes raacutepido que la
velocidad de transmisioacuten de los datos Por ello junto con el mensaje que se enviacutea de
correcciones tambieacuten se enviacutea el tiempo de validez de las correcciones y sus
tendencias Por tanto el receptor deberaacute hacer alguacuten tipo de interpolacioacuten para
corregir los errores producidos
Si se deseara incrementar el aacuterea de cobertura de correcciones DGPS y al mismo
tiempo minimizar el nuacutemero de receptores de referencia fijos seraacute necesario modelar
las variaciones espaciales y temporales de los errores En tal caso estariacuteamos hablando
del GPS diferencial de aacuterea amplia
Con el DGPS se pueden corregir en parte los errores debidos a
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
24
Disponibilidad selectiva (eliminada a partir del antildeo 2000)
Propagacioacuten por la ionosfera - troposfera
Errores en la posicioacuten del sateacutelite (efemeacuterides)
Errores producidos por problemas en el reloj del sateacutelite
Para que las correcciones DGPS sean vaacutelidas el receptor tiene que estar relativamente
cerca de alguna estacioacuten DGPS generalmente a menos de 1000 km Las precisiones
que manejan los receptores diferenciales son centimeacutetricas por lo que pueden ser
utilizados en ingenieriacutea
A pesar de su moderna tecnologiacutea el GPS esconde una gran carencia en realidad es
incapaz de medir rumbos Ciertamente todos los equipos GPS ofrecen el rumbo al que
se navega y de hecho nos basamos en su valor (contrastado a veces con el
girocompaacutes) para realizar las anotaciones en el libro bitaacutecora pero la realidad es que
este equipo simplemente es capaz de saber en queacute direccioacuten nos hemos movido es
decir determina el rumbo que aparece en pantalla calculando el rumbo seguido desde
una posicioacuten anterior a la actual Por ese motivo es incapaz de dar un rumbo correcto
cuando el buque no se mueve y de hecho podemos observar coacutemo va dando valores
aleatorios en base a los miacutenimos movimientos del buque ya sea en su atraque o en el
fondeo
Existen otros proyectos similares patrocinados por otros paiacuteses o consorcios La
antigua Unioacuten Sovieacutetica construyoacute un sistema similar llamado GLONASS ahora
gestionado por la Federacioacuten Rusa Actualmente la Unioacuten Europea estaacute desarrollando
su propio sistema de posicionamiento por sateacutelite denominado Galileo que parece
que sigue su curso a pesar de la profunda crisis econoacutemica
A su vez la Repuacuteblica Popular China estaacute implementando su propio sistema de
navegacioacuten el denominado Beidou que contaraacute con entre 12 y 14 sateacutelites entre 2011
y 2015 Para 2020 ya plenamente operativo deberaacute contar con 30 sateacutelites De
momento (abril 2011) ya tienen 8 en oacuterbita
No obstante en el fondo se basan en una tecnologiacutea similar por lo que no considero
necesario profundizar en ellos a efectos del presente trabajo
2234- Carencias del GPS
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente (AIS ECDIS Sonar Sonda o Piloto automaacutetico) pero tal como ya se ha
comentado tiene el grave inconveniente de ser incapaz de cumplir este cometido
cuando el buque no navega haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)
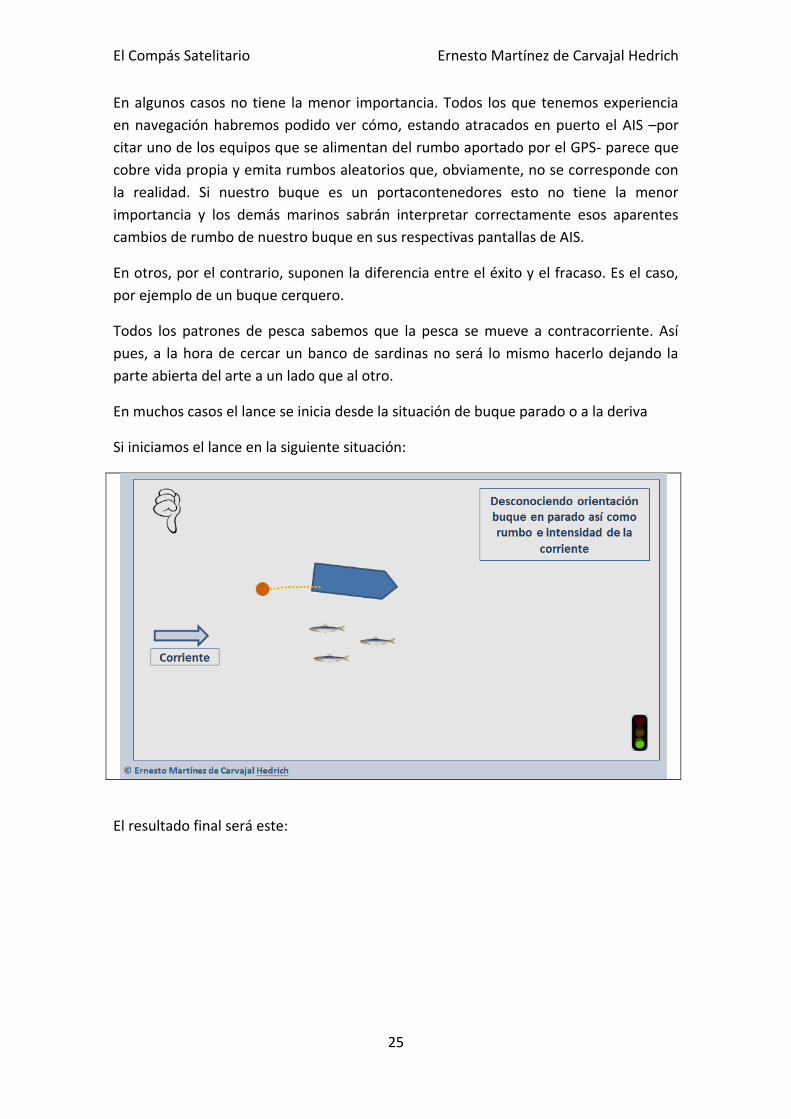
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
25
En algunos casos no tiene la menor importancia Todos los que tenemos experiencia
en navegacioacuten habremos podido ver coacutemo estando atracados en puerto el AIS ndashpor
citar uno de los equipos que se alimentan del rumbo aportado por el GPS- parece que
cobre vida propia y emita rumbos aleatorios que obviamente no se corresponde con
la realidad Si nuestro buque es un portacontenedores esto no tiene la menor
importancia y los demaacutes marinos sabraacuten interpretar correctamente esos aparentes
cambios de rumbo de nuestro buque en sus respectivas pantallas de AIS
En otros por el contrario suponen la diferencia entre el eacutexito y el fracaso Es el caso
por ejemplo de un buque cerquero
Todos los patrones de pesca sabemos que la pesca se mueve a contracorriente Asiacute
pues a la hora de cercar un banco de sardinas no seraacute lo mismo hacerlo dejando la
parte abierta del arte a un lado que al otro
En muchos casos el lance se inicia desde la situacioacuten de buque parado o a la deriva
Si iniciamos el lance en la siguiente situacioacuten
El resultado final seraacute este
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
26
Es decir que el banco de peces se saldraacute por la parte auacuten abierta del arte antes de que
podamos completar el ciacuterculo o antes de virar la corredera
Para evitar esto necesitamos por un lado conocer la direccioacuten de la corriente
informacioacuten que podemos obtener a partir de un correntiacutemetro y por otro lado
necesitamos saber la orientacioacuten exacta de nuestro buque para iniciar el lance en la
direccioacuten correcta para lo cual no nos sirve de nada el GPS
Como veremos maacutes adelante con la informacioacuten proporcionada por el corrientiacutemetro
y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
27
Y el resultado seraacute bastante maacutes satisfactorio
Existen muchos otros tipos de buque que necesitan saber con exactitud cual es su
orientacioacuten incluso cuando estaacuten parados como por ejemplo
Cableros
Remolcadores
Buques de suministro a plataformas
Y queda claro que el GPS no sirve para este propoacutesito al menos en su concepcioacuten
original
224- El Compaacutes fluxgate El compas fluxgate es un dispositivo electromagneacutetico sencillo que utiliza dos o maacutes
pequentildeas bobinas enrolladas en un nuacutecleo de ferrita por la que se hace circular una
corriente alterna que genera otra corriente secundaria senoidal
La tensioacuten de la corriente secundaria alcanza su valor maacuteximo cuando la bobina estaacute
paralela a las liacuteneas del campo magneacutetico terrestre y su valor es nulo cuando se halla a
90 grados
Para conocer la posicioacuten relativa se hace uso de dos sensores perpendiculares entre siacute
Uno de ellos genera una tensioacuten secundaria equivalente al coseno del aacutengulo que
forman las liacuteneas del campo magneacutetico terrestre con la bobina mientras que el
segundo sensor genera una tensioacuten secundaria en funcioacuten del seno del mismo aacutengulo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)

El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
28
Siempre es conveniente que el compaacutes disponga de una funcioacuten de alarma que avise al
patroacuten ante guintildeadas superiores a las previstas
El compaacutes electroacutenico no precisa rosa naacuteutica para indicar los rumbos pudiendo no
soacutelo mostrar digitalmente los resultados sino tambieacuten intercambiar informacioacuten con
otros instrumentos
Uno de los sistemas maacutes empleados consta de tres bobinas que forman un triaacutengulo
junto a un nuacutecleo de hierro que al hacer pasar la corriente actuacutea como un
electroimaacuten Dado que el campo magneacutetico del hierro no puede sobrepasar el valor de
saturacioacuten dicho campo tiene un valor maacuteximo cualquiera que sea la intensidad de la
corriente que circule por las bobinas La bobina que capte mayor cantidad del campo
magneacutetico es la que primero quedaraacute saturada El conjunto actuacutea como una vaacutelvula de
flujo de ahiacute el nombre en ingleacutes de ldquofluxgaterdquo con el que se conocen estos compases
Al contrario de lo que sucede con las agujas magneacuteticas las bobinas del fluxgate no
tienen necesidad de orientarse para proporcionar la informacioacuten requerida bastando
para convertir los valores eleacutectricos generados en impulsos que enviados a un display
o instrumento adecuado pueden convertirse en rumbos equivalentes
Los compases electroacutenicos utilizan las mismas liacuteneas de fuerza magneacutetica que los
compases convencionales por lo que se ven afectados por los fenoacutemenos de desviacuteos y
variaciones magneacuteticas si bien pueden separarse el sensor e indicador de rumbo lo
que permite situar el sensor en el lugar de a bordo menos expuesto a perturbaciones e
interferencias
Una buena parte de los modelos existentes en el mercado disponen de un sistema de
compensacioacuten automaacutetico de precisioacuten + 05 grados Para introducir los valores de
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
29
variacioacuten magneacutetica y desviacuteos basta con dar uno o maacutes giros de 360 grados con el
barco para que el mismo aparato registre los errores existentes y los vaya aplicando en
funcioacuten del rumbo seguido De no disponer de esta funcioacuten automaacutetica disponen de
un teclado para introducir manualmente la correccioacuten
Otros modelos de mayor coste utilizan una sentildeal GPS para determinar la ubicacioacuten del
buque y aplicar la declinacioacuten magneacutetica correspondiente a esa zona de navegacioacuten
Este e el caso por ejemplo del modelo PG-500 de Furuno
Sensor fluxgate Pantalla
La compensacioacuten no tiene en cuenta la componente vertical terrestre por lo que es
imprescindible exista una buena estabilidad horizontal del sensor Algunos fluxgate
disponen de suspensiones cardan e incluso llevan los sensores inmersos en aceite
Los equipos fijos suelen disponer de una interfaz NMEA
Basa su funcionamiento en el magnetoacutemetro un dispositivo que sirve para cuantificar
en fuerza o direccioacuten la sentildeal magneacutetica de una muestra Los hay muy sencillos como
la balanza de Gouy o la balanza de Evans que miden el cambio en peso aparente que
se produce en una muestra al aplicar un campo magneacutetico (por el momento magneacutetico
que se induce) y tambieacuten muy sofisticado como los dotados de SQUID que son los
maacutes sensibles actualmente
No son equipos muy utilizados en la naacuteutica ya que al basar su funcionamiento en el
campo magneacutetico terrestre al igual que un compaacutes tradicional se ve afectado por los
mismos problemas que este y adicionalmente requiere una pequentildea fuente de
energiacutea Es decir tiene las mismas desventajas que un compaacutes tradicional y por el
contrario no es capaz de funcionar sin alimentacioacuten eleacutectrica Adicionalmente si
queremos incrementar su precisioacuten lo hemos de conectar a un GPS En otras palabras
puestos a utilizar la tecnologiacutea GPS nos parece mucho maacutes adecuado el Compaacutes
Satelitario
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
30
225- El compaacutes satelitario Este equipo que es el objeto de este trabajo lo tratamos en profundidad en el
apartado 3 Simplemente adelantar que actualmente es el equipo maacutes preciso para
determinar la direccioacuten de un buque en casi cualquier situacioacuten incluso parado
226- Progresioacuten tecnoloacutegica Algo que sin duda me ha llamado mucho la atencioacuten es el hecho de que actualmente
se siga utilizando en la navegacioacuten mercante equipos basados en una tecnologiacutea que
cuenta con muchos antildeos a sus espaldas No es que reniegue de la bondad de algo
simplemente por el hecho de ser antiguo Lo que es llamativo es que haya sido capaz
de seguir en activo mientras que en otros campos la vida media de una tecnologiacutea es
en ocasiones de apenas una deacutecada
En ese sentido he querido mostrar de forma esquemaacutetica este hecho
Obseacutervese que desde la aparicioacuten del compaacutes naacuteutico hasta el girocompaacutes
transcurrieron 800 antildeos A partir de ahiacute la evolucioacuten fue algo menos lenta y ldquosolordquo
transcurrieron 200 antildeos hasta la aparicioacuten del GPS
Esto nos permite calificar al compaacutes como un prodigio de la supervivencia tecnoloacutegica
maacutexime si lo comparamos con otras tecnologiacuteas como la informaacutetica o la telefoniacutea que
desde sus inicios sigue una curva exponencial
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
31
En el caso concreto de la informaacutetica podemos situar sus inicios a finales de los antildeos
40 principio de los 50 A la sazoacuten los computadores se construiacutean utilizando
dispositivos electromecaacutenicos como los releacutes y dispositivos electroacutenicos baacutesicos como
las vaacutelvulas termoioacutenicas las resistencias y los condensadores No teniacutean pantalla ni
teclado ni sistema operativo y su programacioacuten se haciacutea a base de tarjetas perforadas
o recableando las conexiones entre sus componentes
Aquellos primeros colosos como el Mark Y o el ENIAC ocupaban toda una sala
pesaban varias toneladas y tardaban una decena de segundos al hacer una divisioacuten En
los uacuteltimos 50 antildeos la ciencia y la tecnologiacutea han hecho posible pasar de esos
dinosaurios a los ordenadores de hoy en diacutea los cuales podemos coger con la palma de
la mano y son capaces de realizar centenares de millones de operaciones por segundo
Este salto ha sido posible gracias al transistor a los circuitos integrados y a los
dispositivos de almacenamiento de datos magneacutetico soacutelidos y oacutepticos
Quizaacutes maacutes cercana al puacuteblico general es el caso de la evolucioacuten de la telefoniacutea que en
su etapa final se ha combinado con la informaacutetica ofreciendo pequentildeos dispositivos
que ademaacutes de elevadas prestaciones de telefoniacutea disponen de una potencia de
caacutelculo extremadamente superior a los primeros ordenadores
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
32
Sin duda los motivos de esta anormal longevidad del compaacutes se debe a aspectos tales
como
Su simplicidad
Su eficacia
Su nulo consumo energeacutetico
El problema para el compaacutes es que cada diacutea se busca maacutes la automatizacioacuten y los
puentes integrados y a pesar de sus ventajas el compaacutes no es capaz de comunicarse
con los demaacutes elementos electroacutenicos presentes hoy en diacutea en el puente de un buque
y aunque fuese capaz de ello su rumbo no seriacutea el adecuado para alimentarlos
El GPS sin duda es hoy en diacutea el elemento del cual maacutes nos fiamos los marinos y de
hecho suele ser en muchos casos el que aporta el dato del rumbo a los demaacutes equipos
del puente pero tal como ya se ha comentado tiene el grave inconveniente de ser
incapaz de cumplir de forma correcta este cometido cuando el buque no navega
haciendo que todos los equipos se vuelvan ldquolocosrdquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
33
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
34
3- El compaacutes satelitario
Llegamos finalmente al compaacutes satelitario tambieacuten llamado compaacutes satelital Sin duda
es el dispositivo actual maacutes preciso para determinar los rumbos a pesar de lo cual se
basa en un elemento que por siacute solo no es capaz de ello el GPS
El compaacutes satelital consta de tres antenas GPS en un soacutelido soporte
En principio dos antenas A1(ref) y A2(proa) cada una conectada con un GPS y un
procesador son instaladas en la liacutenea proa-popa del barco Los sistemas GPS en A1 y
A2 calculan las distancias y acimuts al sateacutelite
La diferencia de distancia entre A1 y A2 es Dl + nl donde l es 19 cm y n es hallado
automaacuteticamente durante la etapa de inicializacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
35
Una fraccioacuten de longitud de onda portadora Dl es procesada para mediciones
geograacuteficas asiacute se determina el vector A1-A2 esto es el rumbo del barco con relacioacuten
al Norte
En la praacutectica se antildeade al sistema una tercera antena para reducir la influencia del
cabeceo del balanceo y de la guintildeada y se usan 5 sateacutelites para procesar datos 3D (3ordm
sateacutelite) reducir el error de reloj (4ordm sateacutelite) y calcular n en el paso inicial (5ordm
sateacutelite)
Si la sentildeal GPS es bloqueada por alguacuten obstaacuteculo los sensores de relacioacuten giroscoacutepica
de 3 ejes en el procesador sustituyen a los sateacutelites hasta que se restauran las sentildeales
de eacutestos si bien esta es una situacioacuten poco habitual en los buques mercantes
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
36
Los sensores de relacioacuten contribuyen tambieacuten junto con la tercera antena (A3 en la
ilustracioacuten) a atenuar los efectos del cabeceo del balanceo y de la guintildeada en la
determinacioacuten del rumbo
Este compaacutes satelitario puede ser utilizado para una amplia variedad de aplicaciones
que requieren sentildeal de rumbo tales como RadarARPA AIS ECDIS Sonar Sondas
Piloto Automaacutetico etc
Su funcionamiento no se ve afectado ni por la velocidad del barco la latitud el
geomagnetismo etc
El tiempo de respuesta es miacutenimo y el seguimiento es excelente hasta 45ordms (SOLAS
HSC Code requiere como miacutenimo 20ordms)
Suministra informacioacuten de posicioacuten GPS SOG (velocidad sobre el fondo) COG (rumbo
sobre el fondo) y ROT (velocidad de giro)
La SOG calculada mediante el desplazamiento Doppler de las sentildeales satelitarias es
notablemente precisa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
37
Asiacute mismo al poder determinar de forma precisa los grados de escora y cabeceo se le
puede dotar de alarmas cuando dichos valores excedan de un determinado valor
Aprobado seguacuten IMO SMC116(73) como un Dispositivo Transmisor de Rumbo (THD)
con precisioacuten de +- 06ordm
Relacioacuten de seguimiento de hasta 45ordms muy por encima de lo exigido por la IMO para
buques raacutepidos (20ordms)
Otra ventaja que seraacute muy apreciada por las navieras es que es un equipo
absolutamente exento de mantenimiento regular anual
31- Componentes
Los componentes de un compaacutes satelitario son
La antena
El receptor de la sentildeal de correccioacuten diferencial
El procesador
La unidad de visualizacioacuten
Vamos a ver cada uno de estos componentes para lo cual utilizaremos la informacioacuten
teacutecnica disponible del modelo SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
38
311- La antena Como ya se ha comentado previamente se trata de tres receptores GPS montados en
un soporte
Obviamente debe estar instalada en el exterior y sin elementos fiacutesicos que puedan
alterar la sentildeal GPS enviada por los sateacutelites ya sea bloqueaacutendola o generando
reflexiones
Situacioacuten ideal Situacioacuten no ideal
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
39
En caso necesario se puede dotar a la antena de elementos ldquoespanta paacutejarosrdquo
Este seriacutea su ubicacioacuten en el diagrama de conexioacuten
312- El receptor de la sentildeal de correccioacuten diferencial Opcionalmente se puede alimentar al sistema mediante la sentildeal de correccioacuten
diferencial lo que permite incrementar su precisioacuten en la posicioacuten desde los 10m a los
5m
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
40
En el caso de este equipo de Furuno cabe mencionar que ademaacutes de poder
incrementar la precisioacuten con la sentildeal diferencial se puede configurar para utilizar el
sistema WAAS (Wide Area Augmentation System o Sistema de Aumentacioacuten Basado en
Sateacutelites) desarrollado por Estados Unidos el cual se trata de un complemento para la
red GPS al objeto de proporcionar una mayor precisioacuten y seguridad en las sentildeales
permitiendo una precisioacuten en la posicioacuten menor de dos metros En el fondo funciona
como el GPS diferencial si bien la informacioacuten es transmitida por medio de una
constelacioacuten especiacutefica de 3 sateacutelites y solo funciona en las aacutereas en las que se dispone
de las correspondientes estaciones terrenas (Estados Unidos Alaska Hawaacutei y Puerto
Rico)
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
41
313- El procesador El procesador es el elemento que realiza los caacutelculos necesarios a partir de la
informacioacuten proporcionada por todos los elementos de entrada como los tres GPS la
sentildeal diferencial giroacutescopos etc
Cuando el sistema se arranca por primera vez no tiene en memoria informacioacuten de los
sateacutelites GPS (Almanaque) en estas condiciones tarda aproximadamente 12 minutos
en adquirir el almanaque encontrar el rumbo y presentar laquoOKraquo
El contador de tiempo en la esquina superior izquierda de la pantalla indica el tiempo
transcurrido desde el encendido del equipo si transcurridos 30 minutos no aparece la
indicacioacuten laquoOKraquo la situacioacuten de la antena no es la adecuada no hay cinco sateacutelites laquoa
la vistaraquo o existe alguacuten obstaacuteculo en el camino de las sentildeales
314- La unidad de visualizacioacuten Es el elemento con el cual controlamos el funcionamiento del equipo y en el cual
podemos visualizar la informacioacuten que genera el procesador
Dispone de los siguientes botones para el control del equipo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
42
Dada la gran variedad de datos disponibles podemos verla agrupada seguacuten diferentes
modos de presentacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
43
En el modo gobierno se presenta el rumbo en forma numeacuterica y analoacutegica Tambieacuten se
indican SOG (velocidad con relacioacuten al fondo) y COG (rumbo con relacioacuten al fondo)
En el modo de navegacioacuten se presenta la posicioacuten (en latitud y longitud) el rumbo la
velocidad la fecha la hora y el estado de determinacioacuten de la posicioacuten
El modo rotacioacuten nos permite conocer la direccioacuten y velocidad con la que el buque rota
sobre siacute mismo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
44
El modo deriva nos permite conocer los datos de la corriente rumbo e intensidad
horaria para lo cual el equipo debe ser alimentado mediante la informacioacuten
proporcionada por un corrientiacutemetro
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
45
Asiacute mismo dispone de otras pantallas en las que podemos comprobar el estado del
equipo como por ejemplo la pantalla en la que al igual que en los GPS nos muestra el
estado de la recepcioacuten de las sentildeales de los sateacutelites
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
46
Como ya vimos al hablar de las carencias del GPS el compaacutes satelitario aporta
informacioacuten real de la orientacioacuten del buque incluso cuando estaacute parado algo que no
es de excesivo intereacutes en muchos buques mercantes pero que siacute lo es en buques
especiacuteficos tales como por ejemplo pesqueros remolcadores o de suministro
En el caso concreto de los pesqueros gracias a la informacioacuten proporcionada por el
corrientiacutemetro y el compaacutes satelitario podemos iniciar el lance en la direccioacuten correcta
es decir contracorriente para que al completar el cerco el banco de peces se
encuentre con la parte cerrada del arte en su direccioacuten de avance (contra corriente)
Y el resultado seraacute bastante maacutes satisfactorio
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
47
Ya solo falta cerrar el arte virando la jareta y embarcar el pescado mediante el salabar
Otro problema tiacutepico de los buques pesqueros es que tanto las sondas como los
soacutenares se ven afectados cuando se trabaja en condiciones de mar gruesa lo que
provoca que las sondas cambien constantemente la profundidad de un banco de peces
o que el sonar pierda el banco de peces sobre el que se habiacutea dirigido el foco
La mayoriacutea de compases satelitarios son capaces de transmitir a estos equipos los
valores de correccioacuten necesarios para compensar los movimientos verticales del buque
cuando trabaja en condiciones de mar gruesa haciendo que la sonda ofrezca
profundidades respecto de la altura media de las olas y que la sonda sea capaz de
ajustar su aacutengulo de trabajo de forma automaacutetica
El compaacutes satelitario puede ofrecer a los demaacutes equipos la siguiente informacioacuten
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
48
Ademaacutes de sus ventajas tecnoloacutegicas hay otro factor de suma importancia a
considerar Teniendo en cuenta que en muchos buques mercantes se utiliza el
girocompaacutes como elemento fundamental para conocer el rumbo real hemos
considerado interesante comparar los costes entre estos dos equipos
Ademaacutes del desembolso econoacutemico tanto para su compra como para su instalacioacuten y
mantenimiento perioacutedico se ha de tener en cuenta otros factores como por ejemplo
el consumo de ambos equipos siendo de 70 watios en el caso del girocompaacutes frente a
los 15 del compaacutes satelitario Esto supone que el girocompaacutes que es relativamente
voluminoso debe instalarse en un lugar suficientemente ventilado para poder disipar
el calor que genera
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
49
Ademaacutes debido a su elevado tiempo de puesta en marcha no se suele apagar en las
estancias en puerto maacutexime en la actualidad ya que las estancias se reducen al
miacutenimo posible fieles a la filosofiacutea de que el buque en puerto no genera beneficios
4- Construccioacuten de un prototipo de bajo coste
Volvamos un momento sobre el funcionamiento del GPS Seguacuten comentaacutebamos en el
apartado correspondiente este equipo es incapaz de medir rumbos de forma directa
como lo hace por ejemplo un compaacutes flugate y en su lugar lo que hace es
determinarlo en base a dos situaciones consecutivas de un buque
Dada la cantidad de caacutelculos que es capaz de hacer por segundo es evidente que estas
dos posiciones consecutivas pueden ser muy proacuteximas cuando la velocidad del buque
es baja
Supongamos un buque navegando 2 nudos o su equivalente en metros por segundo
que seriacutea de 1 ms Suponiendo que el GPS es capaz de darnos correctamente el
rumbo en un segundo significa que es capaz de discriminar las miacutenimas diferencias
que habraacute en las coordenadas de dos puntos separados un metro
Bien pues la propuesta del prototipo de Compaacutes Satelitario se basa precisamente en
que bastariacutean dos GPS alienados en la liacutenea de crujiacutea separados uno de otro un metro
Leyendo simultaacuteneamente los valores de ambos GPS podemos determinar mediante
una estima inversa queacute rumbo se ha de seguir para ir desde el GPS de popa al de proa
rumbo que corresponde con la orientacioacuten del buque esteacute parado o no
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
50
Veamos un caso praacutectico
Suponiendo que la lectura de los dos GPS fuese
Determinamos las diferencias de latitud y longitud
Seguidamente siendo puristas calculamos la latitud media para obtener el
apartamiento
Y finalmente calculamos el rumbo para ir del GPS de popa al de proa
Seguramente habriacutea quien podriacutea considerar poco ortodoxo utilizar el meacutetodo
loxodroacutemico para calcular el rumbo pero teniendo en cuenta que la distancia entre los
dos puntos es de 1 metro es evidente que es perfectamente factible utilizar este
meacutetodo incluso en el caso de situar ambos receptores GPS en los extremos
longitudinales del buque a una distancia siendo generosos de 450 metros que es la
eslora del superpetrolero Knock Nevis
Rizando un poco el rizo auacuten podemos exprimir algo maacutes las propias prestaciones que
nos ofrecen los microprocesadores que contienen todos los equipos GPS para
simplificarnos el trabajo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
51
Entre las tiacutepicas funcionalidades del cualquier GPS estaacute como no podiacutea ser menos la
de darnos el rumbo a seguir para ir desde la situacioacuten actual a la de destino En otras
palabras si al GPS de popa le pedimos que nos lleve a la posicioacuten correspondiente al
GPS de proa tendriacuteamos un rumbo que seriacutea la orientacioacuten real del buque
Asiacute pues una forma de simplificar nuestro prototipo es precisamente la expuesta por
lo que el algoritmo se reduce a darle al GPS de popa el punto de destino que
corresponde al GPS de proa tras lo cual solo resta leer el rumbo calculado por el
propio GPS de popa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
52
Teniendo en cuenta este enfoque estos son los elementos que vamos a necesitar para
construir nuestro prototipo
Veamos en detalles cada uno de estos elementos
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
53
41- CPU de LEGO
Para el desarrollo del prototipo utilizaremos diferentes componentes del sistema LEGO
MindStorm tanto por su bajo coste como por su versatilidad LEGO MindStorm es una
plataforma para el aprendizaje de roboacutetica y montaje de robots totalmente
funcionales con los que anteriormente ya habiacutea disentildeado elementos tales como un
radar o un vehiacuteculo capaz de desplazarse en un rumbo determinado
El corazoacuten de este sistema es el denominado ldquoladrillordquo que constituye la unidad
central de proceso dotada de cuatro entradas para diferentes tipos de sensores tres
salidas para diferentes actuadores y un puerto USB para conectarse a un ordenador al
objeto fundamentalmente de cargarle el programa correspondiente
En la parte frontal dispone de una pequentildea pantalla LCD de 100 x 64 piacutexels asiacute como
de cuatro botones que pueden utilizarse para el control de la propia CPU (por ejemplo
navegar entre carpetas y ficheros ejecutar y parar los programas) asiacute como en los
programas como entradas Internamente funciona con un microprocesador ARM7 de
32-bits
ARM es una arquitectura RISC (Reduced Instruction Set Computer Computacioacuten de
Juego de Instrucciones Reducidas) de 32 bits desarrollada por ARM Holdings Fue
llamado Advanced RISC Machine y anteriormente Acorn RISC Machine La arquitectura
ARM es el conjunto de instrucciones de 32 bits maacutes ampliamente utilizado en unidades
producidas Originalmente concebida por Acorn Computers para su uso en
ordenadores personales los primeros productos basados en ARM eran los Acorn
Archimedes lanzados en 1987
La relativa simplicidad de los procesadores ARM los hace ideales para aplicaciones de
baja potencia Como resultado se han convertido en el procesador dominante en el
mercado de la electroacutenica moacutevil e integrada encarnados en microprocesadores y
microcontroladores pequentildeos de bajo consumo y relativamente bajo coste En 2005
alrededor del 98 de los maacutes de mil millones de teleacutefonos moacuteviles vendidos cada antildeo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
54
utilizan al menos un procesador ARM Desde 2009 los procesadores ARM son
aproximadamente el 90 de todos los procesadores RISC de 32 bits empotrados y se
utilizan ampliamente en la electroacutenica de consumo incluyendo PDAs tabletas
teleacutefonos moacuteviles videoconsolas de mano calculadoras reproductores digitales de
muacutesica y medios (fotos viacutedeos etc) y perifeacutericos de ordenador como discos duros y
routers
Adicionalmente el ladrillo de LEGO estaacute dotado con 256 Kbytes de memoria FLASH y 64
Kbytes de memoria RAM suficientes para almacenar un programa complejo
Su coste es de unos 190 euros Sin duda seriacutea posible encontrar un procesador
programable de menor coste pero hemos preferido utilizar este por lo mucho que
facilita la conexioacuten de los componentes asiacute como la sencillez con la que se desarrollan
los programas
42- Sensores dGPS de Dexter Industries
Para los sensores y actuadores hay dos posibilidades utilizar directamente los que
proporciona Lego Mindstorms u otra empresa que construya sensores adaptados al
bloque NXT como puede ser HiTechnic Pero tambieacuten se puede utilizar sensores no
adaptados (o externos) los cuales tambieacuten funcionan con el bloque NXT siempre y
cuando se implementen adecuadamente
LEGO no dispone entre sus sensores de un GPS pero por suerte hemos encontrado
una empresa Dexter Technologies cuya actividad se centra exclusivamente en el
disentildeo y fabricacioacuten de sensores compatibles con LEGO MINDSTORMS NXT y entre los
sensores que ofrecen tienen uno que es un GPS diferencial Considero que dado que
el prototipo que vamos a disentildear soacutelo va a proporcionarnos el rumbo (y no la
posicioacuten) no es necesaria la precisioacuten aportada por un GPS diferencial siempre y
cuando el posible error de posicioacuten del GPS no diferencial de popa sea el mismo que el
de proa lo cual queda garantizado por el propio fundamento del GPS diferencial
El fundamento del GPS diferencial radica en el hecho de que los errores producidos
por el sistema GPS afectan por igual (o de forma muy similar) a los receptores
situados proacuteximos entre siacute Los errores estaacuten fuertemente correlacionados en los
receptores proacuteximos
Al ser el uacutenico disponible con un coste de 90 doacutelares (que por alguna extrantildea razoacuten se
vende en Europa al mismo precio en euros) nos tocaraacute desembolsar 180 euros por
una pareja y lo que es peor veacuternoslas con Aduanas uacuteltimamente muy aacutevida de tasas y
recargos por lo que el coste final puede duplicarse
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
55
Seguacuten la informacioacuten aportada por el propio fabricante ldquoEl GPS de Dexter Industries
GPS es una unidad GPS fabricada para ser utilizada con LEGOreg MINDSTORMSreg NXT El
sensor determina la posicioacuten y calcula datos de navegacioacuten Ofrece por lo tanto la
latitud la longitud la hora la velocidad y el rumbo seguido asiacute como informacioacuten
sobre la distancia y el rumbo para llegar a una situacioacuten determinadardquo
El sensor GPS se conecta a cualquiera de las cuatro entradas disponibles en el ladrillo NXT mediante un cable dotado en sus extremos de conectores RJ (los tiacutepicos de un teleacutefono fijo)
Los datos de salida que ofrece el sensor GPS son
Fecha y hora UTC
Latitud
Longitud
Velocidad en cms
El rumbo (en grados)
Asiacute pues por el mismo coste podriacuteamos leer ademaacutes la velocidad convertirla a nudos y
visualizarla
Por otro lado le podemos pasar al GPS la latitud y longitud de destino (o de punto de
paso) en cuyo caso el GPS calcula la distancia y el rumbo que se debe seguir para ir
hasta eacutel informacioacuten que podemos leer
Estas son las partes del sensor GPS de Dexter Industries
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
56
El sensor GPS se conecta al ladrillo LEGO a traveacutes de cualquiera de los cuatro puertos
disponibles para sensores A partir de ese momento se activa la unidad e inicia la
buacutesqueda de sentildeales GPS procedentes de los sateacutelites Dependiendo de donde se
encuentre y del horizonte visible la unidad puede tardar maacutes o menos tiempo El
tiempo total de adquisicioacuten de datos depende mucho de la ubicacioacuten de la unidad y de
la disposicioacuten de los sateacutelites visibles En un lugar despejado y sin obstaacuteculos el tiempo
total puede ser de medio minuto Una vez completado este proceso la unidad ya es
capaz de darnos las coordenadas y se enciende el led azul En caso de peacuterdida de la
sentildeal se apaga el led si bien la unidad mantiene la uacuteltima posicioacuten calculada
Si se desconecta la unidad del ladrillo NXT se apaga la unidad y pierde todos sus datos
En la siguiente imagen podemos ver una propuesta de montaje asiacute como la pantalla
del bloque LEGO mostrando los dados proporcionados por el sensor GPS
Tambieacuten se puede observar el cable de conexioacuten La luz azul indica que estaacute recibiendo
correctamente la sentildeal GPS
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
57
Para poder utilizar el entorno de programacioacuten graacutefico proporcionado por LEGO
necesitamos descargarnos los ldquomoacutedulosrdquo de la paacutegina web del fabricante
Una vez hemos descargado los moacutedulos de control debemos importarles en el
software de LEGO Mindstorms NXT y ha partir de ese momento podemos incluirlos en
nuestro programa como uno maacutes de los sensores
Estas son las ldquoconexionesrdquo disponibles cuando se utiliza el moacutedulo para leer los datos
relativos a la posicioacuten actual
El nuacutemero que aparece en la parte superior derecha corresponde a la puerta del
bloque NXT al que hemos conectado el sensor
Mientras que estas son las ldquoconexionesrdquo disponibles para saber la distancia y rumbo a
seguir para ir a un determinado destino
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
58
A partir de junio de 2012 este sensor dispondraacute de un nuevo firmware con
funcionalidades antildeadidas
Altitud
Grado de precisioacuten
Nuacutemero de sateacutelites visibles
Para nuestro prototipo no necesitamos estas nuevas funcionalidades
Seguacuten el fabricante la precisioacuten de este sensor es de 3 metros En cualquier caso este
no es un tema relevante para nuestro propoacutesito siempre y cuando los dos sensores
sean capaces de darnos el mismo valor cuando los pongamos juntos En caso negativo
simplemente deberemos tener en cuenta la diferencia para corregir los valores de uno
de ellos
43- Piezas varias de LEGO
De hecho no necesitamos necesariamente una estructura para el prototipo ya que
podemos disponer los sensores GPS en dos soportes y conectarlos al ladrillo pero
obviamente es maacutes esteacutetico hacer alguacuten tipo de estructura que incluso puede ser
relativamente parecida a uno de los compases satelitarios disponibles en el mercado
En nuestro caso hemos pensado al algo de este estilo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
59
No obstante es evidente que esta no es una cuestioacuten importante y por lo tanto no
haremos demasiada incidencia
44- El programa
Para el software existe la opcioacuten de utilizar el programa de desarrollo que proporciona
Lego con la plataforma Lego Mindstorms NXT fabricado por LabVIEW Este programa
permite ldquoescribirrdquo nuestro programa en un coacutemodo e intuitivo entorno graacutefico
(LabView lo bautizoacute como lenguaje G en referencia a ldquoGraacuteficordquo) si bien son compilados
cuando se procede a cargarlos en el ladrillo
Ademaacutes del propio programa de desarrollo necesitamos los moacutedulos de software que
nos permitan gestionar los sensores GPS los cuales se pueden descargar de la paacutegina
web de Dexter Industries
Como ya vimos el algoritmo que vamos a plantear es el que nos evita realizar ninguacuten
tipo de caacutelculo pasando al GPS de popa la posicioacuten del GPS de proa como destino y
pedirle seguidamente al GPS de popa cuaacutel es el rumbo a seguir
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
60
El primer paso antes de escribir el programa seraacute convertir el algoritmo en
pseudocoacutedigo es decir en un conjunto de instrucciones escrito en un lenguaje maacutes o
menos cercano
Seguidamente entramos en el entorno de desarrollo de Lego MindStorms NXT y
creamos nuestro programa
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
61
En el siguiente graacutefico explicamos cual es la funcioacuten de cada elemento
Y con esto hemos completado nuestro prototipo de un compaacutes satelitario simplificado
Quede claro que este prototipo en modo alguno pretende emular a sus hermanos
mayores ofrecidos por las diferentes marcas comerciales entre otras cosas porque al
no disponer del tercer GPS no es capaz por ejemplo de dar informacioacuten relativa al
balance del buque ni corregir los errores que este movimiento pueda provocar pero
es sin duda una buena forma de hacer maacutes comprensible esta tecnologiacutea y por otro
lado es absolutamente funcional para lograr el objetivo que nos hemos propuestos
que es conocer hacia doacutende mira el buque en cualquier situacioacuten incluso parado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
62
5- Costes
Nos queda hablar de la cuestioacuten monetaria Nos ha parecido interesante comparar los
costes del compaacutes satelitario con el girocompaacutes ya que a fin de cuentas es este uacuteltimo
equipo al que maacutes fiabilidad se le otorga en los buques que no disponen de un compaacutes
satelitario
Adicionalmente incluimos en la comparativa el coste de nuestro prototipo ya que a
pesar de que no aporta las mismas funcionalidades que los modelos comerciales si
hace y de forma perfecta lo maacutes fundamental que es darnos la orientacioacuten del buque
(no el rumbo que sigue) y adicionalmente podriacuteamos disponer de la velocidad
respecto del fondo
Es evidente que el girocompaacutes tiene los diacuteas contados En su contra tiene ademaacutes de
su elevado coste de compra su elevado coste de mantenimiento y el hecho de que es
un equipo con muchos componentes mecaacutenicos y como tales sujetos a fallos asiacute
como su elevado consumo y generacioacuten de calor
Por el contrario el compaacutes satelitario tiene un coste sensiblemente inferior y ademaacutes
estaacute praacutecticamente libre de mantenimiento Los problemas que puede presentar son
de hecho los mismos que un GPS Su consumo eleacutectrico es similar a una bombilla
actual de bajo consumo
La inclusioacuten de nuestro humilde prototipo permite evidenciar que a pesar de que el
Compaacutes Satelitario es mucho maacutes econoacutemico que un girocompaacutes auacuten podriacutea ser maacutes
barato y su elevado coste en realidad obedece a la poliacutetica habitual de los
constructores cuando sacan al mercado equipos dotados de ldquonueva tecnologiacuteardquo
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
63
Debemos tener en cuenta que en nuestro prototipo hemos utilizado una CPU
programable dotada de 4 entradas 3 salidas un conector USB y memoria RAM en
definitiva un elemento mucho maacutes caro que un microprocesador especiacuteficamente
disentildeado para hacer la tarea correspondiente al programa que hemos disentildeado por lo
que el coste auacuten podriacutea ser menor y de hecho un prototipo funcional pero con los
elementos miacutenimos necesarios tendriacutea un coste en torno a los 250 euros
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
64
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
65
6- Conclusiones
El compaacutes satelitario en realidad no es si no un conjunto de receptores GPS (o dGPS)
trabajando en equipo
Por lo tanto no se puede considerar como el fruto de una nueva tecnoloacutegica
Lo que siacute es novedoso es la forma en la que se hace uso de dicha tecnologiacutea con la
ventaja de que se trata de tecnologiacutea muy experimentada lo que sin duda le situacutea
actualmente en la cima de los dispositivos electroacutenicos indicadores de rumbo
Como toda ldquonueva tecnologiacuteardquo su coste actual es elevado pero se reduciraacute
draacutesticamente en pocos antildeos
Muy probablemente apareceraacuten equipos de bajo coste para buques en los cuales lo
uacutenico que se requiere es conocer el rumbo (u orientacioacuten) del buque
Sus grandes ventajas sobre el girocompaacutes supondraacuten la desaparicioacuten de este equipo
cuyos costes no han bajado maacutexime en un entorno econoacutemico en el que las navieras
intentan reducir al maacuteximo los costes reduccioacuten que por suerte en este caso no
tendriacutea consecuencias negativas
Dado que para su funcionamiento se requiere alimentacioacuten eleacutectrica es de esperar
que el compaacutes magneacutetico continuacutee siendo un equipo obligatorio a bordo al menos
como equipo alternativo o de fortuna ya que en caso de ausencia absoluta de
corriente es el uacutenico capaz de darnos un rumbo cuanto menos aproximado
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
66
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
67
7 Anexos
71- Folleto del girocompaacutes GC85 de Simrad
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
68
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
69
72- Folleto del compas satelitario SC-110 de Furuno
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
70
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
71
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
72
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
73
El Compaacutes Satelitario Ernesto Martiacutenez de Carvajal Hedrich
74
8- Fuentes de informacioacuten
Artiacuteculo ldquoTWO EARLY ARABIC SOURCES ON THEMAGNETIC COMPASSrdquo de Petra G
Schmidl
Journal of Arabic and Islamic Studies (Volume 1) Antildeo 1997 Editado por Joseph
Norment Bell y Petr Zemaacutenek
Libro ldquoNavegacioacuten deportiva y profesionalrdquo Antildeo 2006 Autor y editor Ernesto Martiacutenez
de Carvajal Hedrich
httpdexterindustriescommanualdgps-2 (27-05-2012)
httpwwwfurunocomenindexhtml (28-05-2012)
httpwwwsimradcom (28-05-2012)
httpmindstormslegocomen-usdefaultaspxicmp=COUSFR28MINDSTORMS (28-
05-2012)