DOCUMENTO PROYECTO DE GRADO DISEÑO Y CONSTRUCCIÓN …
33
1 DOCUMENTO PROYECTO DE GRADO DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE SEGURIDAD PARA UNA PLATAFORMA 3 RRS PRESENTADO POR: ESTUDIANTE DE PREGADO SAUL A. PIÑERES ABDALA PARA OBTAR POR EL TITULO DE: INGENIERO MECANICO PRESENTADO A: PROFESOR CARLOS F. RODRIGUEZ.H, DR.ENG.IND. [email protected] SEMESTRE 2014-02 UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA MECÁNICA BOGOTÁ D.C.
Transcript of DOCUMENTO PROYECTO DE GRADO DISEÑO Y CONSTRUCCIÓN …

1
DOCUMENTO PROYECTO DE GRADO
DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE SEGURIDAD PARA UNA PLATAFORMA 3 RRS
PRESENTADO POR:
ESTUDIANTE DE PREGADO
SAUL A. PIÑERES ABDALA
PARA OBTAR POR EL TITULO DE:
INGENIERO MECANICO
PRESENTADO A:
PROFESOR
CARLOS F. RODRIGUEZ.H, DR.ENG.IND.
SEMESTRE 2014-02
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
BOGOTÁ D.C.

2
Contenido Introducción .................................................................................................................................... 4
1. Descripción de la plataforma 3RRS ........................................................................................ 5
1.1 Estructura Mecánica ......................................................................................................... 6
1.2 Caja de control ................................................................................................................. 8
2. Necesidad de un sistema de seguridad .................................................................................. 10
2.1 Protección de la Plataforma 3RRS contra si misma ....................................................... 11
2.2 Seguridad ante interacción con humanos ....................................................................... 12
2.3 Protección ante interacción con objetos ......................................................................... 12
2.4 Protección adicional ....................................................................................................... 13
3. Sistema de seguridad Plataforma 3RRS ............................................................................... 13
3.1 Operador Lógico ............................................................................................................ 14
3.2 Límite de Carrera ........................................................................................................... 15
3.2.1 Requerimientos de diseño ....................................................................................... 15
3.2.2 Etapa de diseño ....................................................................................................... 16
3.2.3 Selección del sensor ................................................................................................ 19
3.2.4 Construcción de la estructura del sistema de sensores............................................ 21
3.2.5 Implementación del límite de carrera ..................................................................... 21
3.3 Tope Físico ..................................................................................................................... 23
3.3.1 Requerimientos de diseño ....................................................................................... 23
3.3.2 Etapa de diseño ....................................................................................................... 24
3.3.3 Construcción de la base de reposo y montaje del tope físico. ................................ 27
4. Prueba de los mecanismos de seguridad ............................................................................... 28
4.1.1 Diseño y ejecución de pruebas. ............................................................................... 28
4.1.2 Resultados ............................................................................................................... 29
5. Conclusiones ......................................................................................................................... 30
6. Anexos .................................................................................................................................. 31
Bibliografía ................................................................................................................................... 33
3
Tabla de Contenido de Figuras, tablas y ecuaciones.
Figura 1. Esquema de funcionamiento de la plataforma 3RRS ...................................................... 5
Figura 2. Estado de la Plataforma 3RRS antes de la realización del proyecto ............................... 6
Figura 3. Vista isométrica CAD Plataforma 3RRS posterior a la ejecución del proyecto ............. 7
Figura 4. Vista isométrica CAD, cadena cinemática brazo 3. ........................................................ 7
Figura 5. Disposición de los elementos en la caja de control por dentro. ....................................... 8
Figura 6. Tarjeta de control MP2300S Fuente: (Yaskawa Robotics) ............................................ 9
Figura 7. Unidad amplificadora MECHATROLINK-II y Motor electrico SGMGV-09A3A61
Fuente: (Yaskawa Robotics) ........................................................................................................... 9
Figura 8. Barrera movil ................................................................................................................. 13
Figura 9. Diagrama de Venn sistema de seguridad Plataforma 3RRS ......................................... 14
Figura 10. Esquema trayectoria eslabón 1. ................................................................................... 16
Figura 11. Representación en CAD del giro de un eslabón ......................................................... 17
Figura 12. CAD de la platina ....................................................................................................... 18
Figura 13. Diseño final en CAD del límite de carrera ................................................................. 19
Figura 14. Sensor de Proximidad Inductivo PRCM18-8DN Fuente: (ELECTRICAS BOGOTA
LTDA ).......................................................................................................................................... 20
Figura 15. Conexiones para el modulo LIO-01 Fuente: Figura 14.4.15 (MP2300iec Hardware
Manual YEA-SIA-IEC-2Q, 2013) ................................................................................................ 22
Figura 16. Circuito para conectar los sensores con la MP2300S .................................................. 22
Figura 17. Diagrama esquemático para los tipos de colisión........................................................ 24
Figura 18. Amortiguador de choque OEM 0.25MB Fuente: (Micro Pneumatic S.A., 2014)....... 25
Figura 19. CAD del tope físico o base de reposo de la Plataforma 3RRS .................................... 26
Figura 20. CAD de la base de reposo diferenciado en colores. .................................................... 26
Figura 21. Simulación del CAD de la base de reposo por medio de elementos finitos. ............... 27
Figura 22. Base de reposo ............................................................................................................. 27
Figura 23. Diseño preliminar que consideraba tope físico de caucho convencional. ................... 31
Figura 24. Diseño preliminar que consideraba montar el sensor junto con el tope físico. ........... 31
Tabla 1. Resultados prueba mecanismo de seguridad de nivel 1 ................................................. 28
Tabla 2. Resultados prueba mecanismo de seguridad nivel 2 ..................................................... 29
Tabla 3. Resultados prueba mecanismo de seguridad nivel 3 y 4. .............................................. 29
Tabla 4. Memoria de cálculos para la selección del amortiguador de choque ............................ 31
Tabla 5. Arreglo de cableado y conectores. Fuente: Tabla 14.4.12 (MP2300iec Hardware
Manual YEA-SIA-IEC-2Q, 2013) ................................................................................................ 32
Ecuación 1. Energía Cinética ........................................................................................................ 24
Ecuación 2. Energía de Empuje .................................................................................................... 24

4
Introducción
El presente documento contiene los detalles de la ejecución del proyecto de grado de grado
Diseño y construcción de un sistema de seguridad para una Plataforma 3RRS, en primer lugar se
presenta una descripción de la Plataforma 3RRS, su funcionamiento y los elementos mecánicos
que la componen con el objetivo de hacer entrar en contexto al lector.
A medida que se avanza en el documento se argumenta él porque es necesaria la concepción de
un sistema de seguridad para este tipo de robot paralelo, lo anterior teniendo en cuenta los
reglamentos internos de la universidad, las políticas nacionales al respecto y las normas
internacionales que cobijan la operación de este tipo de máquinas.
Posteriormente se hace una descripción completa del sistema de seguridad desarrollado para la
plataforma 3RRS, discriminado por medio de niveles y agrupado teniendo en cuenta aquellos
elementos que se pueden introducir en conjunto para mantener con un hilo conductor al
documento. Adicionalmente es importante mencionar que el énfasis del sistema seguridad es la
protección de la maquina contra sí misma por causa de impactos entre sus componentes.
Finalmente se presentan las pruebas realizadas a la máquina, los resultados de las mismas y un
conjunto de recomendaciones y conclusiones sobre el proyecto, ya que estos últimos son
aspectos a tener en cuenta para la operación de la Plataforma 3RRS.

5
1. Descripción de la plataforma 3RRS
La plataforma 3RRS es un tipo de robot paralelo con 3 grados de libertad capaz de desarrollar
múltiples tareas, diseñada para soportar una capacidad de carga aproximada de 500 kg. La
estructura mecánica de la plataforma 3RRS está conformada por una cadena cinemática abierta
de 6 eslabones, los cuales se agrupan de a pares para formar 3 brazos mecánicos e impulsar al
robot. Cada brazo mecánico es impulsado por un motor eléctrico rotacional por medio de un
sistema de transmisión de potencia. Los motores eléctricos reciben la energía de una unidad
amplificadora de potencia, una para cada motor y que reciben la señal de control por medio de
una tarjeta multiejes Yaskawa MP2300S. Esta configuración se presenta en Figura 1.
Figura 1. Esquema de funcionamiento de la plataforma 3RRS
En esta sección se describirá con más detalle los elementos mencionados anteriormente, para lo
cual en la primera parte se explicara la cadena cinemática junto con el sistema de transmisión de
potencia que impulsa los eslabones. Posteriormente se mostrara la caja de control del sistema,
que contiene el sistema de control y las unidades amplificadores de potencia. Finalmente se
explicara el sistema de cableado de la plataforma 3RRS.
Ordenes de Operador
Tarjeta de control
Unidades amplificadora de potencia
Motores electricos
Sistema de transmision de
portencia
Cadena Cinematica

6
Figura 2. Estado de la Plataforma 3RRS antes de la realización del proyecto
1.1 Estructura Mecánica
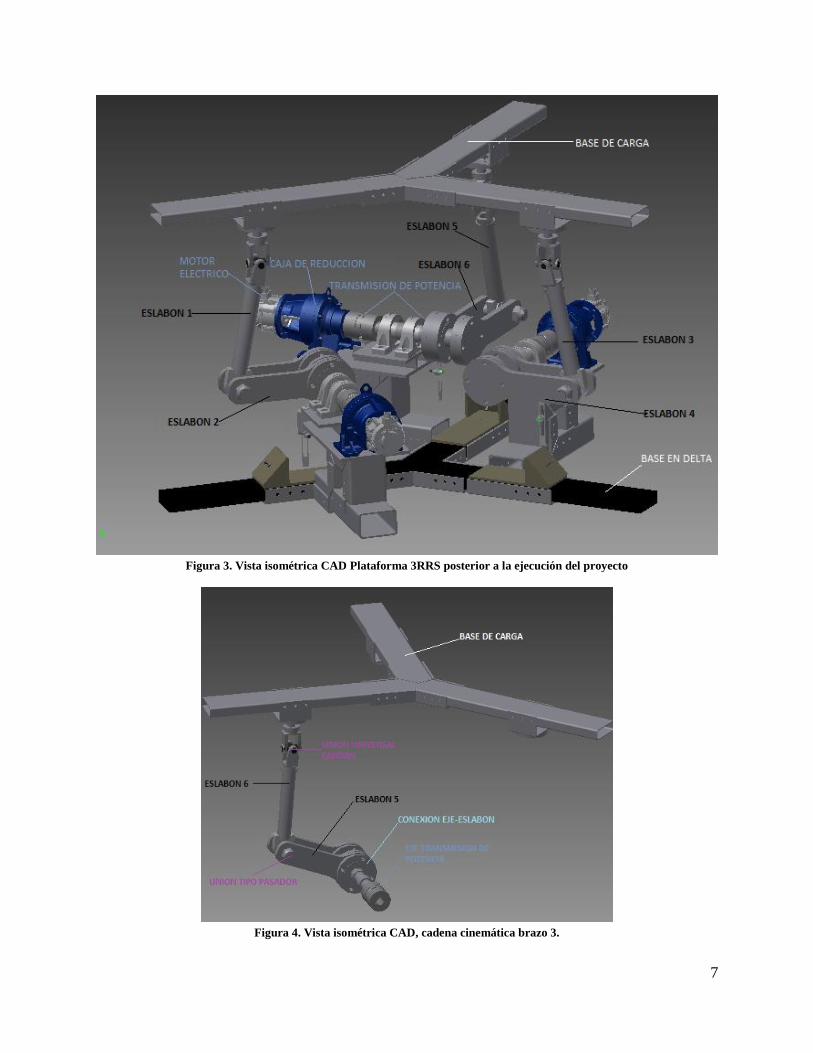
La plataforma 3RRS se encuentra constituida por 6 eslabones como se puede observar en la
Figura 3, los cuales se puede agrupar en 3 conjuntos de cadenas cinemáticas que se llaman
brazos. El primer brazo está compuesto entonces por los eslabones 1 y 2, el segundo brazo por
los eslabones 3 y 4, mientras que el tercer brazo está conformado por los eslabones 5 y 6. El
motor eléctrico hace girar un eje conectado a una caja de reducción, esta última amplifica el
torque y transmite la potencia un eje que se conecta directamente al brazo de la plataforma.
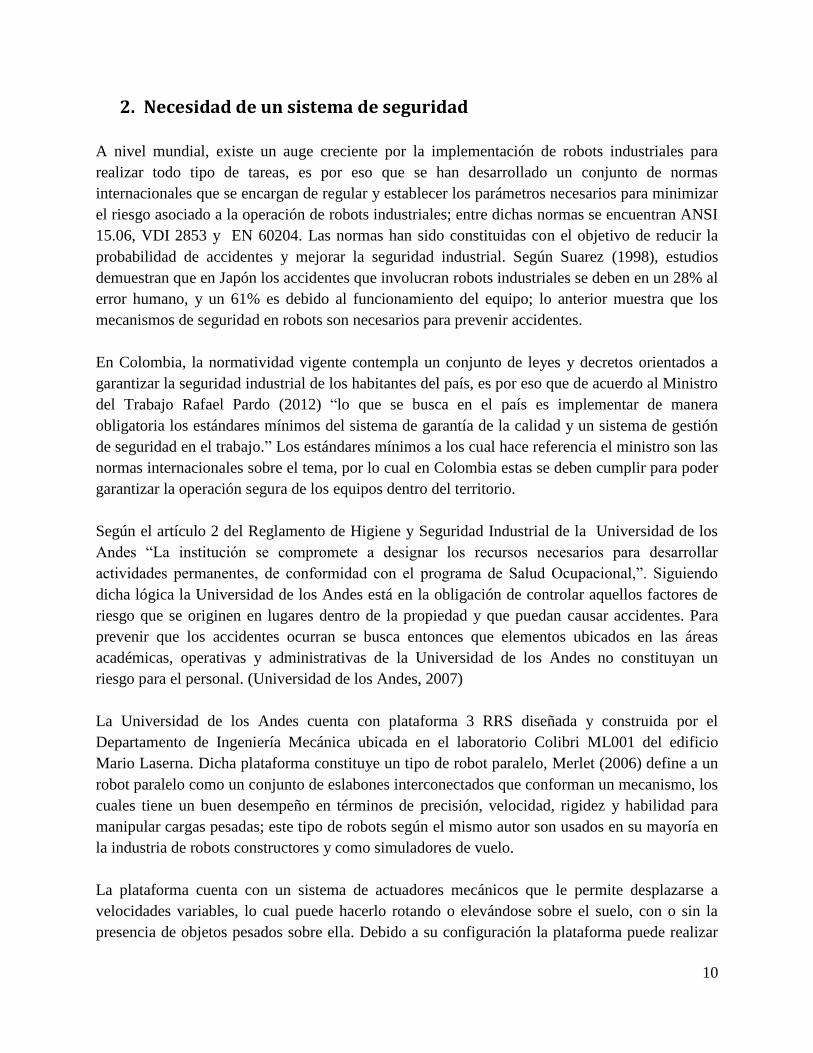
Cada brazo tiene sus eslabones conectados por medio de elementos de sujeción no permanentes
que restringen los grados de libertad de cada eslabón a uno, permitiéndoles a estos rotar con
respecto a una única dirección. Por ejemplo como se puede evidenciar en la Figura 4 para la
cadena cinemática del brazo 3 la conexión entre el eje y el eslabón 5 es XXXX, posteriormente
la conexión entre los eslabones 5 y 6 es por medio de un pasador roscado en los extremos, por
último la conexión entre el eslabón 6 y la base de carga se realiza con la ayuda de una unión
universal tipo cardan que permite a la base de carga moverse en cualquier dirección.
7
Figura 3. Vista isométrica CAD Plataforma 3RRS posterior a la ejecución del proyecto
Figura 4. Vista isométrica CAD, cadena cinemática brazo 3.

8
1.2 Caja de control
En la caja de control se encuentran montados la Tarjeta multiejes MP2300S de la firma
Yaskawa, las unidades amplificadores de potencia de cada motor, una fuente de energía principal
y los reguladores de voltaje de cada amplificador. Adicionalmente se cuenta con un disyuntor
para permitir el flujo de corriente al sistema y que puede ser accionado en caso de emergencia
desde un botón en la parte frontal de la caja de control para cortar la corriente y detener la
plataforma 3RRS. La distribución de elementos se puede evidenciar en la Figura 5.
Figura 5. Disposición de los elementos en la caja de control por dentro.
La tarjeta de control MP2300S de la firma Yaswaka mostrada en la Figura 6 sincroniza la
secuencia de control y el movimiento bajo una misma plataforma, por medio de esta se puede
controlar la posición, velocidad, torque y fase de los módulos amplificadores interconectados. La
unidad es programable mediante el software MotionWorks™ del fabricante, ya sea en lenguaje
Ladder, estructura de texto o diagramas de bloques. La conexión entre el operador y la
plataforma 3RRS se realiza por medio de este elemento usando un puerto Ethernet con protocolo
Modbus TCP.

9
Figura 6. Tarjeta de control MP2300S
Fuente: (Yaskawa Robotics)
La plataforma 3RRS cuenta con un amplificador para cada uno de los 3 motores que la impulsan,
de la firma Yaskawa el MECHATROLINK-II se encarga de amplificar la señal de voltaje y
corriente. En la Figura 7 se puede observar con más detalle la unidad amplificadora y el servo
motor utilizado en la plataforma 3RRS.
Figura 7. Unidad amplificadora MECHATROLINK-II y Motor electrico SGMGV-09A3A61
Fuente: (Yaskawa Robotics)
10
2. Necesidad de un sistema de seguridad
A nivel mundial, existe un auge creciente por la implementación de robots industriales para
realizar todo tipo de tareas, es por eso que se han desarrollado un conjunto de normas
internacionales que se encargan de regular y establecer los parámetros necesarios para minimizar
el riesgo asociado a la operación de robots industriales; entre dichas normas se encuentran ANSI
15.06, VDI 2853 y EN 60204. Las normas han sido constituidas con el objetivo de reducir la
probabilidad de accidentes y mejorar la seguridad industrial. Según Suarez (1998), estudios
demuestran que en Japón los accidentes que involucran robots industriales se deben en un 28% al
error humano, y un 61% es debido al funcionamiento del equipo; lo anterior muestra que los
mecanismos de seguridad en robots son necesarios para prevenir accidentes.
En Colombia, la normatividad vigente contempla un conjunto de leyes y decretos orientados a
garantizar la seguridad industrial de los habitantes del país, es por eso que de acuerdo al Ministro
del Trabajo Rafael Pardo (2012) “lo que se busca en el país es implementar de manera
obligatoria los estándares mínimos del sistema de garantía de la calidad y un sistema de gestión
de seguridad en el trabajo.” Los estándares mínimos a los cual hace referencia el ministro son las
normas internacionales sobre el tema, por lo cual en Colombia estas se deben cumplir para poder
garantizar la operación segura de los equipos dentro del territorio.
Según el artículo 2 del Reglamento de Higiene y Seguridad Industrial de la Universidad de los
Andes “La institución se compromete a designar los recursos necesarios para desarrollar
actividades permanentes, de conformidad con el programa de Salud Ocupacional,”. Siguiendo
dicha lógica la Universidad de los Andes está en la obligación de controlar aquellos factores de
riesgo que se originen en lugares dentro de la propiedad y que puedan causar accidentes. Para
prevenir que los accidentes ocurran se busca entonces que elementos ubicados en las áreas
académicas, operativas y administrativas de la Universidad de los Andes no constituyan un
riesgo para el personal. (Universidad de los Andes, 2007)
La Universidad de los Andes cuenta con plataforma 3 RRS diseñada y construida por el
Departamento de Ingeniería Mecánica ubicada en el laboratorio Colibri ML001 del edificio
Mario Laserna. Dicha plataforma constituye un tipo de robot paralelo, Merlet (2006) define a un
robot paralelo como un conjunto de eslabones interconectados que conforman un mecanismo, los
cuales tiene un buen desempeño en términos de precisión, velocidad, rigidez y habilidad para
manipular cargas pesadas; este tipo de robots según el mismo autor son usados en su mayoría en
la industria de robots constructores y como simuladores de vuelo.
La plataforma cuenta con un sistema de actuadores mecánicos que le permite desplazarse a
velocidades variables, lo cual puede hacerlo rotando o elevándose sobre el suelo, con o sin la
presencia de objetos pesados sobre ella. Debido a su configuración la plataforma puede realizar

11
movimientos impredecibles para un observador mientras realiza una trayectoria, ya que está
programada mediante valores lógicos que le dan la capacidad de realizar pausas y aceleraciones
repentinas, las cuales pueden ocasionar un accidente a personas u objetos cercanos a ella.
Siendo la plataforma 3 RRS un robot mecánico que genera un riesgo durante su operación,
corresponde entonces a la Universidad de los Andes construir un sistema de seguridad apropiado
para el funcionamiento de la plataforma, esto cobijado por los estatutos y normas nacionales e
internacionales de seguridad y manejo de riesgos en robots industriales.
Entre los criterios a ser tenidos en cuenta para el diseño y construcción de un sistema de
seguridad apropiado se encuentran los siguientes factores:
Movimiento independiente de cada brazo del robot.
Movimiento en simultaneo de los ejes que componen el robot (cadena cinemática)
Velocidad y aceleración programable para cada eje
Espacio físico que ocupa el robot y su alcance.
Interacción con operadores y maquinas cercanas al robot.
Movimientos repentinos e impredecibles producto del movimiento de las articulaciones.
Medidas de seguridad para intervención en cascada (niveles)
2.1 Protección de la Plataforma 3RRS contra si misma
Debido a que es un elemento mecánico que opera sin la intervención directa de un operario, la
Plataforma 3RRS constituye un tipo de robot que no es capaz de identificar riesgos y peligros
cuando se trata de ejecutar una trayectoria introducida por el usuario. Por lo anterior y a
diferencia de un ser vivo la maquina no puede prever una colisión contra sí misma, una sobre
carga en sus componentes eléctricos o incluso los superar los niveles de esfuerzo y torque
permitidos en sus componentes mecánicos.
Se constituye una necesidad entonces el diseño y consecución de un sistema de seguridad
apropiado para que la Plataforma 3RRS sea capaz de protegerse contra sí misma antes y durante
su operación. Haciendo uso de límites de software se es capaz de definir que los componentes
eléctricos y mecánicos de la maquina funcionen dentro de un rango operación, evitando una
sobre carga. Adicionalmente utilizando límites de carrera es posible delimitar el alcance de la
cadena cinemática que mueve la Plataforma 3RRS, previniendo así una colisión entre los
eslabones. Por último la concesión de un tipo físico garantiza que en caso de una colisión contra
sí misma la Plataforma 3RRS no sufra daños estructurales.

12
2.2 Seguridad ante interacción con humanos
La única forma de garantizar con un 100% de certeza la seguridad de los seres humanos es
manteniendo a programadores, operadores y personal de mantenimiento fuera del espacio de
trabajo del robot; lo anterior se torna una labor complicada porque para cierto tipo de
operaciones el objetivo de la plataforma 3RRS es simular una tarea que requiere interacción con
personas.
Para la plataforma 3RRS se requiere diferenciar los lineamientos de seguridad dependiendo de la
actividad que está realizando la máquina, ya que se puede estar realizando una rutina de Home,
ejecutando una trayectoria o deteniendo la máquina. Durante cada una de estas actividades los
rangos de velocidad, aceleración y torque de cada una de los brazos deben ser delimitados dentro
de un rango seguro de operación seguro.
La Comisión Electrotécnica internacional bajo la norma IEC 204-1, 10.7 define los estándares
bajo los cuales debe operar el botón parada emergencia que posee la plataforma 3RRS. La parada
de emergencia consiste en un botón que es presionando por un usuario y corta el suministro de
corriente a los motores, deteniendo el movimiento de manera instantánea.
2.3 Protección ante interacción con objetos
Se debe considerar la seguridad de los componentes de la plataforma 3RRS debido a que es un
prototipo, por lo tanto los eslabones que la componen no se consiguen comercialmente;
adicionalmente los elementos mecánicos, electrónicos y de transmisión de potencia son de
elevado costo. En caso de sufrir algún daño cualquiera de estos elementos requeriría una suma de
tiempo y dinero considerable, es entonces importante preservar la integridad estructural de la
plataforma 3RRS.
Es apropiado tener una buena protección a nivel de software para que la Plataforma 3RRS no
esté sujeta a valores de velocidad, aceleración, inercia o momento angular que puedan ejercer
esfuerzos excesivos sobre los componentes mecánicos y actuadores. Los límites para cada uno de
estos parámetros son introducidos en un operador lógico, el cual se programa sobre la tarjeta de
control del sistema.
La plataforma 3RRS se mueve por medio de 3 servomotores, los cuales son sensibles a
fluctuaciones en la potencia de alimentación, en consecuencia cada unidad amplificadora cuenta
un sistema de potenciómetros con el objetivo de prevenir un sobresalto en los valores de
corriente y voltaje que alimentan el sistema.

13
2.4 Protección adicional
Se cuenta con una barrera física móvil que aísla el espacio de trabajo de la Plataforma 3RRS,
mediante la barrera se puede delimitar el área en la cual el robot se está moviendo y evitar que
una persona y objeto ingrese al dentro al mismo. Este elemento se puede apreciar en la Figura 8.
Figura 8. Barrera movil
Para la operación de la Plataforma es necesario contar con un personal técnico debidamente
calificado y entrenado capaz de reaccionar ante una eventualidad.
Adicionalmente en el laboratorio Colibri se tiene a disposición un extintor de dióxido de carbono
para controlar cualquier incendio que se pueda generar en los componentes eléctricos del
sistema.
3. Sistema de seguridad Plataforma 3RRS
El sistema de seguridad de la plataforma 3RRS ha sido planteado de forma integral teniendo en
cuenta las necesidades planteadas en la sección anterior, los diferentes mecanismos de seguridad
intervendrán uno a uno tipo jerárquico, y funcionando como niveles de protección que se van
activando secuencialmente en caso que falle el mecanismo anterior. En la Figura 9 se puede
observar un esquema que ilustra lo descrito.

14
Figura 9. Diagrama de Venn sistema de seguridad Plataforma 3RRS
Agrupando los diferentes niveles con el fin de identificar y describir en detalle los elementos de
protección de la plataforma 3RRS, se tiene que durante la primera parte de esta sección se
explicaran las variables y límites de software que conforman el operador lógico del sistema. En
la segunda parte se hará referencia al diseño, construcción e implementación de los límites de
carrera del sistema; concebido por medio de un sistema de sensores de proximidad. Finalmente y
por requerimientos de diseño que se explicaran más adelante se agruparan los niveles de
protección físicos (3 y 4) bajo una misma sección.
3.1 Operador Lógico
Teniendo en cuenta los protocolos de comunicación que posee la unidad MP2300S se decide
manejar la red TCP/IP utilizando una arquitectura Modbus, ya que ofrece una estructura
maestro/esclavo útil para manipular unidades amplificadoras desde una PLC central;
adicionalmente de acuerdo al documento de Goldenberg y Wool (2013) el protocolo
Modbus/TCP brinda una ventaja sobre el TCP/IP debido a que el Modbus utiliza un sistema de
comunicaciones simple basado en un servidor maestro principal el cual se encarga de otorgar las
direcciones IP necesarios a cada uno de los servidores, mientras que en un protocolo TCP/IP se
torna complicado asignar una puerta de entrada a cada cliente que desea compartir información
dentro de la red. Una ventaja adicional del protocolo Modbus/TCP es que es compatible con la
unidad Yaskawa y operable mediante el software MotionWorks IEC Pro que se encuentra
disponible en la Universidad de los Andes, adicionalmente sobre el mismo software están hechas
las configuraciones de conexión con los actuadores de la plataforma (hardware), por otro lado en
Nivel 4: Tope Físico
Nivel 3: Colisión
amortiguada
Nivel 2: Limites de
carrera
Nivel 1: Operador
Lógico

15
el ordenador se estará trabajando con el software Matlab que posee la interfaz HMI (Human
Machine Interface) que permite enviar ordenes directamente sobre el servidor maestro utilizando
Modbus/TCP.
En la unidad MP2300S se definió una posición de Home para la Plataforma 3RRS, posición a
partir de la cual se ejecutan todas las trayectorias y se convierte en una rutina obligatoria para
poder operar la máquina. El home de la Plataforma fue definido arbitrariamente y se puede
cambiar fácilmente en el código implementado, adicionalmente la rutina de Home realiza una
comprobación del estado de los sensores de límite de carrera en lazo cerrado, es decir que si uno
de los sensores no está funcionando apropiadamente la maquina no operara.
3.2 Límite de Carrera
Los límites de carrera son dispositivos electrónicos ubicados al final de la trayectoria que recorre
un elemento móvil, los cuales envían una señal cuando detectan un cambio en el estado de un
circuito. Un ejemplo de límite de carrera son los sensores de proximidad ubicados en los
extremos del recorrido de un ascensor, por medio de este mecanismo se puede prevenir que el
ascensor sobre pase la distancia permitida y sufra daños. En esta sección se muestra el proceso
de diseño llevado a cabo y posterior construcción de los elementos necesarios para integrar a la
estructura de la plataforma un sistema de sensores de límite de carrera. Finalmente se
proporcionara información detallada del código implementado para integrar la señal de los
sensores a la tarjeta de control MP2300S. Es importante mencionar que por sensores de aquí en
adelante y en el resto del documento se hace referencia a sensores de proximidad, ya que existen
muchos tipos de sensores como de temperatura, humedad o presión, pero teniendo en cuenta que
se está hablando de la trayectoria de un objeto físico los límites de carrera para este tipo de
aplicación son sensores de proximidad.
3.2.1 Requerimientos de diseño
Los requerimientos necesarios para que el sistema de sensores planteado fuese valido son los
siguientes:
Los sensores deben estar sujetados a la estructura de la Plataforma 3RRS, pero sin usar
uniones permanentes.
La señal de los sensores debe ser compatible con las conexiones de la MP2300S.
La ubicación de los sensores no debe interferir con las trayectorias de la Plataforma
3RRS.
Presupuesto, a ser tenido en cuenta en conjunto con el valor de los elementos de tope
físico.
Debe haber un sensor por cada brazo mecánico de la Plataforma 3RRS.
16
El límite de carrera debe actuar si falla el operador lógico y antes que ocurra la colisión
con el tope físico.
Los sensores requieren una superficie plana para poder activarse.
Los límites de carrera no deben ser puntos fijos, es decir se debe poder cambiar la
posición final a la cual se desea llegar.
Se debe conocer el estado de los sensores antes y durante la operación de la Plataforma
3RRS.
3.2.2 Etapa de diseño
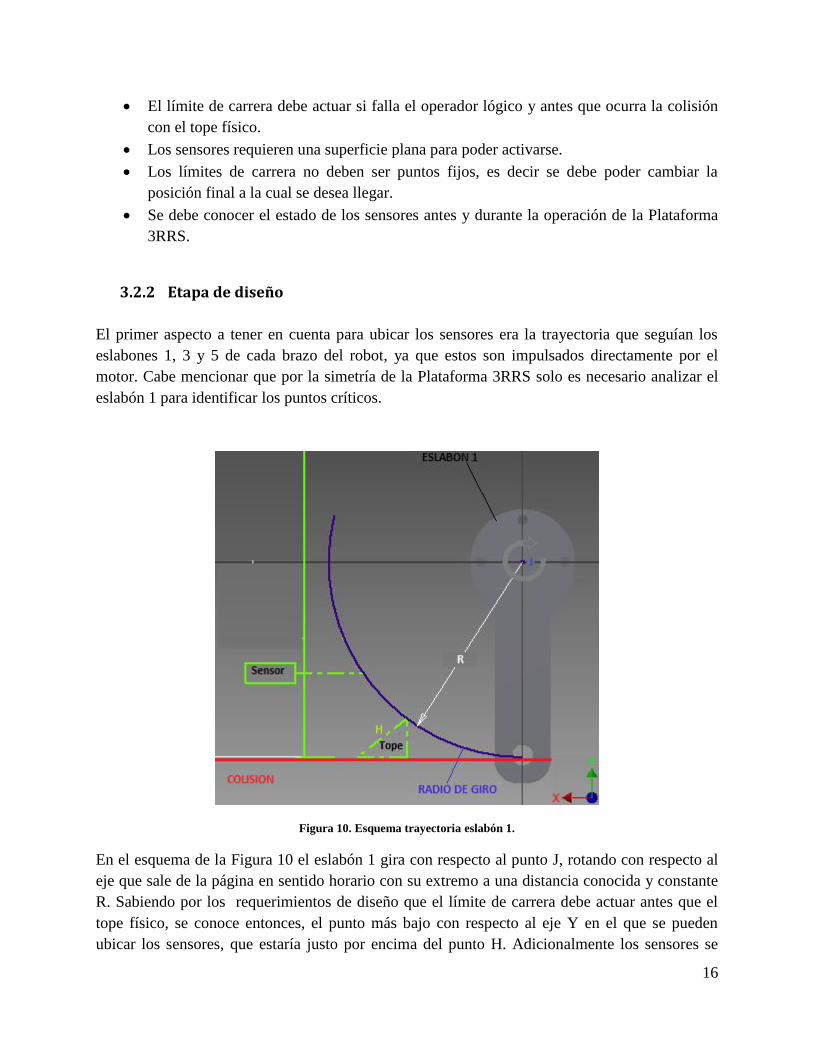
El primer aspecto a tener en cuenta para ubicar los sensores era la trayectoria que seguían los
eslabones 1, 3 y 5 de cada brazo del robot, ya que estos son impulsados directamente por el
motor. Cabe mencionar que por la simetría de la Plataforma 3RRS solo es necesario analizar el
eslabón 1 para identificar los puntos críticos.
Figura 10. Esquema trayectoria eslabón 1.
En el esquema de la Figura 10 el eslabón 1 gira con respecto al punto J, rotando con respecto al
eje que sale de la página en sentido horario con su extremo a una distancia conocida y constante
R. Sabiendo por los requerimientos de diseño que el límite de carrera debe actuar antes que el
tope físico, se conoce entonces, el punto más bajo con respecto al eje Y en el que se pueden
ubicar los sensores, que estaría justo por encima del punto H. Adicionalmente los sensores se
17
ubicaran a una distancia R con respecto al punto J, ya que el elemento de diseño importante a
tener en cuenta en este caso es la trayectoria del brazo, ilustrada como radio de giro en Figura 10.
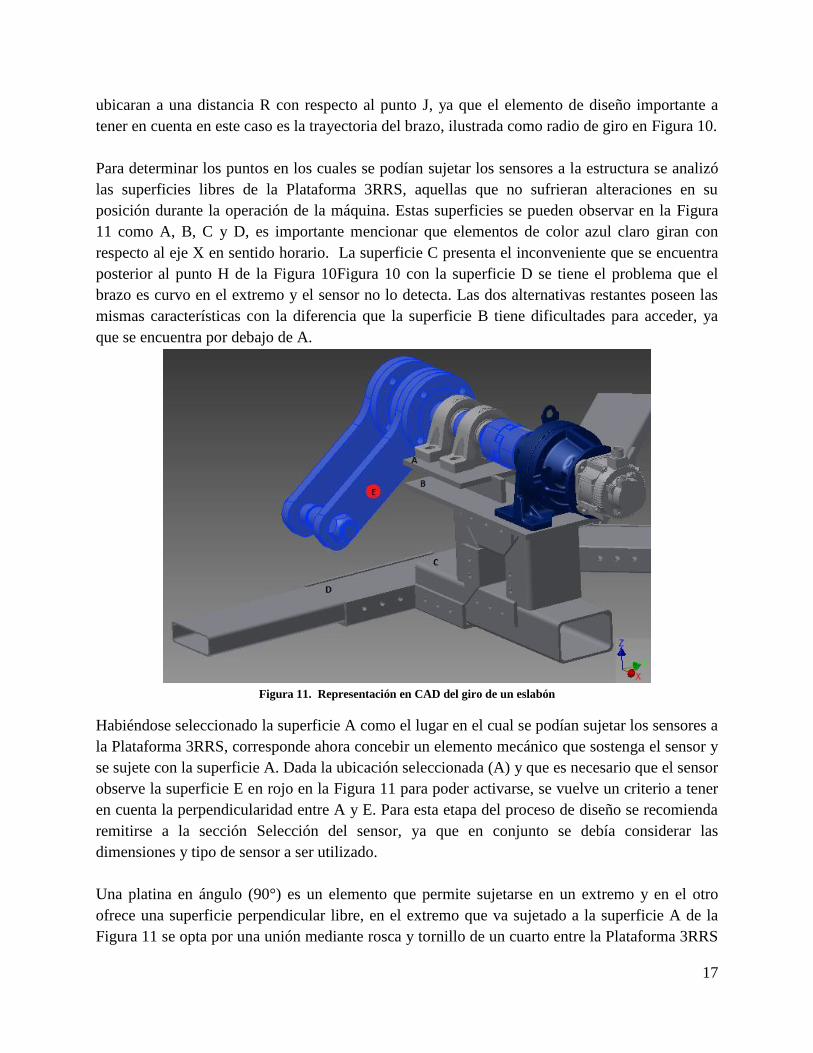
Para determinar los puntos en los cuales se podían sujetar los sensores a la estructura se analizó
las superficies libres de la Plataforma 3RRS, aquellas que no sufrieran alteraciones en su
posición durante la operación de la máquina. Estas superficies se pueden observar en la Figura
11 como A, B, C y D, es importante mencionar que elementos de color azul claro giran con
respecto al eje X en sentido horario. La superficie C presenta el inconveniente que se encuentra
posterior al punto H de la Figura 10Figura 10 con la superficie D se tiene el problema que el
brazo es curvo en el extremo y el sensor no lo detecta. Las dos alternativas restantes poseen las
mismas características con la diferencia que la superficie B tiene dificultades para acceder, ya
que se encuentra por debajo de A.
Figura 11. Representación en CAD del giro de un eslabón
Habiéndose seleccionado la superficie A como el lugar en el cual se podían sujetar los sensores a
la Plataforma 3RRS, corresponde ahora concebir un elemento mecánico que sostenga el sensor y
se sujete con la superficie A. Dada la ubicación seleccionada (A) y que es necesario que el sensor
observe la superficie E en rojo en la Figura 11 para poder activarse, se vuelve un criterio a tener
en cuenta la perpendicularidad entre A y E. Para esta etapa del proceso de diseño se recomienda
remitirse a la sección Selección del sensor, ya que en conjunto se debía considerar las
dimensiones y tipo de sensor a ser utilizado.
Una platina en ángulo (90°) es un elemento que permite sujetarse en un extremo y en el otro
ofrece una superficie perpendicular libre, en el extremo que va sujetado a la superficie A de la
Figura 11 se opta por una unión mediante rosca y tornillo de un cuarto entre la Plataforma 3RRS

18
y la platina. El único criterio de selección para el diámetro del tornillo es la facilidad de
perforación en la superficie A, que según el técnico encargado de la manufactura una broca de un
diámetro menor a 1/4” es muy débil para hacer el agujero. Por lo tanto se utilizaran este tipo de
tornillos. No se hace un análisis de elementos finitos para la platina o la unión debido a que estos
elementos no estarán sometido a ningún tipo de esfuerzo además del peso del sensor, y de la
sección Selección del sensor, se sabe que el peso de estos dispositivos no es superior a 200gr.
Finalmente un agujero del diámetro del sensor de tipo cremallera, ofrece la opción de cambiar la
posición límite de carrera en el extremo opuesto de la platina. La discusión sobre el material de
la platina se puede encontrar en la sección Construcción de la estructura del sistema de sensores.
La platina diseñada se puede observar en la Figura 12.
Figura 12. CAD de la platina
Con el objetivo de disminuir las dimensiones de la platina se optó por agregar una platina en
ángulo al eslabón, lo anterior se debe a que el alcance de los sensores es del orden de 1cm. El
diseño final del sistema de sensores se puede apreciar en la Figura 13.

19
Figura 13. Diseño final en CAD del límite de carrera
3.2.3 Selección del sensor
Para seleccionar el sensor primero se hizo un análisis sobre los tipos de conectividad y puertos
que ofrece la tarjeta de control MP2300S. La unidad de control Yaskawa tiene conectividad
Ethernet, Third Party, OPC Server vía Modbus TCP en su módulo principal, pero la MP2300S
con la que se cuenta contiene un módulo adicional LIO-01 que provee entradas digitales y
encoders.
Los puertos de la MP2300S permiten conectar los límites de carrera por medio de conectividad
inalámbrica o cableada. Según Flammini, Ferrari, Marioli, Sisinni, & Taroni (2009) para
controladores industriales como la MP2300S usar una configuración en cableado elimina la
susceptibilidad a generar distorsión en la medición en contraste a los sensores inalámbricos, los
cuales funcionan con el estándar IEEE802 que verse afectado en lugares donde existe gran
cantidad de dispositivos electrónicos, como ocurre en el laboratorio Colibri.
Teniendo en cuenta las restricciones de presupuesto y la conectividad de la MP2300S es
necesario encontrar un tipo de sensores que se adapten directamente sin la necesidad de adquirir
elementos adicionales. Partiendo de lo anterior se descarta conectar los sensores al módulo
principal ya que hacer esto en cableado se requería comprar una PCL adicional para codificar la
señal del sensor a los puertos disponibles. La oferta de sensores de proximidad en el mercado
tiene señal de salida tanto de pulso (encoder) como digital, por lo tanto el siguiente paso es
determinar cuál de los dos tipos de señal es la más apropiada.
Para seleccionar el tipo de señal se analizó a Suarez (1998), el muestra las ventajas de montar un
circuito que funcione a lazo cerrado todo el tiempo y se abra en caso de un error o de dejar de
20
detectar la señal de entrada; lo cual solo es posible con un sensor de proximidad con salida
digital, ya que con este se puede garantizar un monitoreo permanente sobre los elementos del
sistema, que es uno de los requisitos para los limites de carrera. El puerto de encoder funciona
como un sistema en lazo abierto, activándose solo si recibe una señal de pulso proveniente del
sensor cuando se active, por lo cual un límite de carrera podría estar desconectado y la tarjeta de
control desconocería el hecho; lo anterior puede acarrear consecuencias como que el sensor de
proximidad no detecte el brazo y no intervenga el nivel de seguridad.
Los sensores de proximidad con salida digital se pueden encontrar en dos tipos: inductivos y
capacitivos. Los sensores inductivos tienen la desventaja que solo pueden responder ante la
presencia de un material ferroso, ya que se activa cuando se genera una interferencia en el campo
magnético que posee. A diferencia del inductivo el capacitivo es capaz de detectar materiales no
ferrosos, incluyendo líquidos o materiales orgánicos, ya que este funciona por medio de
capacitancias, que activa la señal cuando se detecta un cambio en la corriente que pasa por el
dispositivo, por lo cual un material sin importar si es ferroso o no puede alterar la resistencia al
paso de la corriente en la capacitancia del sensor. A pesar de la ventaja que ofrece el sensor
capacitivo se optó por un sensor de tipo inductivo, debido a la diferencia en precios, siendo el
capacitivo 40.000 COP en promedio más costoso que el inductivo. A consecuencia de esto la
platina en ángulo que va sujetada al brazo de la Plataforma 3RSS (Figura 13) se debe fabricar en
acero.
El ultimo criterio de selección seria la potencia de alimentación requerida por el sensor de
proximidad y la potencia brindada por la fuente de la Plataforma 3RRS. La plataforma 3RRS
cuenta con una fuente Texas Instruments (Figura 5) que genera 24V en corriente directa, por lo
que se debería buscar en el mercado un sensor de proximidad inductivo de tres hilos (dos para la
alimentación y uno para la señal de salida digital). Un sensor con una cantidad de hilos diferente
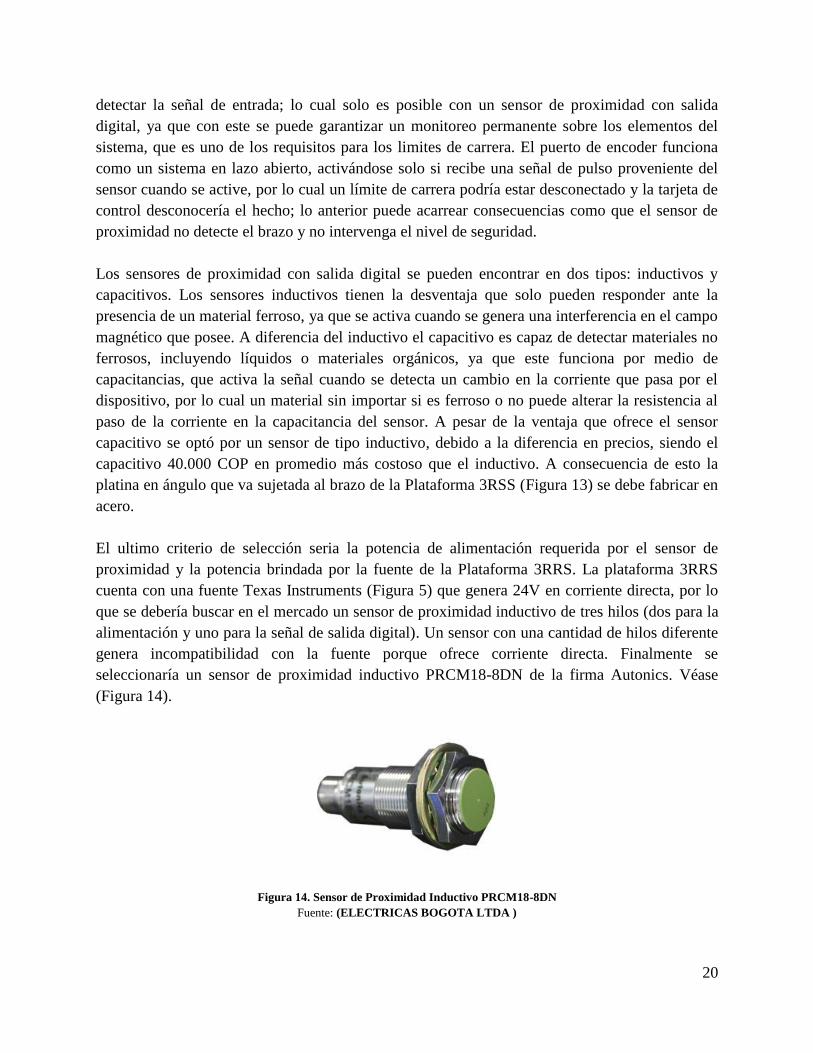
genera incompatibilidad con la fuente porque ofrece corriente directa. Finalmente se
seleccionaría un sensor de proximidad inductivo PRCM18-8DN de la firma Autonics. Véase
(Figura 14).
Figura 14. Sensor de Proximidad Inductivo PRCM18-8DN
Fuente: (ELECTRICAS BOGOTA LTDA )
21
Para efectos de diseño de la platina el peso del sensor es 50gr y posee un diámetro de 18mm. Por
lo que las consideraciones hechas para el diseño de la platina son válidas, adicionalmente el
alcance del sensor es de 8mm +/- 10%, con lo cual se determina el largo de la platina adicional
de acero.
3.2.4 Construcción de la estructura del sistema de sensores
Siguiendo las consideraciones anunciadas durante la etapa de diseño para esta sección, se
realizaron las perforaciones de un 1/4" sobre la superficie A para cada una de las bases de reposo
del motor (Figura 11), y se sujetó cada la platina mediante un par de tornillos. Las tres platinas
para sujetar los sensores a la estructura de la plataforma fueron fabricadas en aluminio de calibre
1/8” por la facilidad que ofrece a menor espesor el material para ser doblado en ángulo (90°),
adicionalmente se realizó una perforación en cremallera sobre el plano XY (Figura 12) de la
platina. La platina adicional que se observa en la Figura 13 fue fabricada en acero de calibre 1/8”
y sobresalen 400 mm sobre la superficie E (Figura 11) del brazo.
3.2.5 Implementación del límite de carrera
Posterior al montaje de los sensores de proximidad es necesario realizar las conexiones eléctricas
para energizar los sensores. De acuerdo al instructivo del sensor la alimentación se debe realizar
de la sabiendo que el cable marrón es para el voltaje positivo, el blanco voltaje negativo y el
negro la señal de salida. Para facilitar las conexiones del cableado se conectaron los sensores de
proximidad en paralelo con la fuente y se hizo tierra utilizando el común del negativo. Después
de comprobar que los sensores estuviesen energizados y activándose cuando detectaba un objeto
metálico (ferroso) en su alcance se procedió a realizar las conexiones con la MP2300S.
Utilizando el Manual de configuración de Hardware de la Unidad MP2300S (Yaskawa Robotics,
2013) en la sección 14.4 primero se identifica cada una de las entradas del módulo LIO-01
usando un código por colores mediante la Tabla 5. Es importante mencionar que el modulo LIO-
01 posee su propio cable adaptador JEPMC-W2061-01 para conectar las entradas digitales o
encoders sin necesidad de puentear directamente con la unidad de control. Posteriormente se
debe para comprender el arreglo del cableado y como realizar las conexiones entre las entradas
del módulo y la señal digital proveniente del sensor. Guiándose por la utilizar el esquema en la
Figura 15, la entrada común B23 de la figura se conecta al positivo de la fuente y se hace un
puente de esta con la señal proveniente de cada uno de los sensores, que para caso las entradas
digitales utilizadas fueron la A18, A17 y A16, siendo estas respectivamente las entradas digitales
DI9, DI11 y DI13.

22
Figura 15. Conexiones para el modulo LIO-01
Fuente: Figura 14.4.15 (MP2300iec Hardware Manual YEA-SIA-IEC-2Q, 2013)
Debido a un problema de impedancias entre la alimentación de la fuente de la Plataforma 3RRS
y la señal de salida del sensor se generaba una caída del voltaje entre el modulo LIO-01 y la
señal digital del sensor; esta situación ocasionaba que la MP2300S reconociera la conexión con
un elemento externo pero no fuese capaz de detectar un cambio a lazo cerrado cuando se
activaba el sensor. Como solución se construyó el circuito de la Figura 16.
Figura 16. Circuito para conectar los sensores con la MP2300S
El circuito de la Figura 16 consta de un transistor y un Relay de 24V para reponer la caída en el
voltaje. Mientras el sensor esta en reposo un transistor hace tierra y permite el paso de la
corriente sin afectar el lazo cerrado, cuando el sensor detecta un cambio en su campo magnético
el transistor activa el circuito permitiendo el paso de la corriente hacia el Relay. El Relay es
capaz de controlar un circuito de salida de mayor potencia que el de entrada, por lo tanto
funciona como un interruptor que por medio de una bobina y un electroimán sube el voltaje de
21V que se tiene directamente a la salida del sensor a los 24V necesarios para la conexión en la
entrada digital.

23
3.3 Tope Físico
Los topes físicos son elementos físicos que permiten delimitar el rango de operación de un
elemento mediante una barrera física. Para la plataforma 3RRS dicha barrera funciona como
elemento de protección en caso que los elementos de seguridad en niveles inferiores fallen y los
eslabones de la maquina vayan a impactar a un objeto o persona.
De la Figura 11 se observa que la superficie D es vulnerable a un impacto por parte del brazo
mecánico de la plataforma en caso que los motores sobrepasen sus límites de software,
adicionalmente si se contrasta la superficie D de la misma figura con el estado de la plataforma
(Figura 2) se encuentra que la Plataforma 3RRS no posee una posición de reposo apropiada sino
que los brazos mecánicos y todo el peso de la plataforma esta descansado sobre la base en delta
de la máquina; lo cual no es apropiado porque en cada ocasión que se detiene la maquina el
impacto para detenerse es transmitido a este elemento, el cual no está diseñado para esta función
ni para actuar como barrera física. Por lo tanto es necesario que el tope físico a ser construido
cumpla con cada una serie de requerimientos y ofrezca una posición de reposo para la
plataforma.
Durante esta sección del documento se pretende ilustrar el proceso de diseño llevado a cabo para
concebir unos topes físicos multipropósito, posteriormente los cálculos y análisis de finitos
realizados para garantizar que la solución planteada cumple con los requerimientos necesarios.
3.3.1 Requerimientos de diseño
Los requerimientos necesarios para que el sistema de topes físicos planteado fuese valido son los
siguientes:
Los topes físicos deben estar sujetados a la estructura de la Plataforma 3RRS, pero sin
usar uniones permanentes.
La colisión con el tipo físico no debe ser destructiva.
El tope físico debe absorber sin deformarse el impacto de un brazo mecánico máxima
velocidad.
La ubicación de los topes físicos no debe interferir con las trayectorias de la Plataforma
3RRS.
Presupuesto, a ser tenido en cuenta en conjunto con el valor de los elementos de tope
físico.
Debe existir un tope físico por cada brazo mecánico de la Plataforma 3RRS.
El límite de carrera debe actuar si falla el operador lógico y antes que ocurra la colisión
con el tope físico.

24
El tope físico solo debe actuar como último mecanismo de protección, por lo tanto no
puede intervenir en el rango de operación de los otros elementos de seguridad
Los topes físicos deben funcionar a su vez como posición de reposo de la Plataforma
3RRS cuando no esté operando.
3.3.2 Etapa de diseño
Como primer punto a ser tenido en cuenta para esta etapa se encuentra la concepción de un
elemento físico capaz de absorber el impacto del brazo mecánico, ya que la presencia de este
elemento delimita considerablemente las alternativas de diseño. Para encontrar este dispositivo
es necesario primero caracterizar el tipo de impacto que ocurriría en caso de haber una colisión y
la energía con la cual ocurriría. Siguiendo la Figura 17 se descantan los 3 primeros tipos de
colisión, entendiendo que la ultimo recuadro impacto con giro, representa la situación que
ocurriría en la Plataforma 3RRS; un brazo mecánico de radio R golpeando a un objeto con un
torque conocido una velocidad angular determinada.
Figura 17. Diagrama esquemático para los tipos de colisión
De acuerdo a las ecuaciones fundamentales de la ingeniería mecánica enunciadas en el libro
Mecánica de Materiales (Hibbeler, 2006) la energía total con la cual impacta un elemento se
encuentra sumando la energía cinética y la energía de empuje del objeto; donde:
Ecuación 1. Energía Cinética
Ecuación 2. Energía de Empuje
25
Dónde:
EC: Energía Cinética [J]
EE: Energía Empuje [J]
I: Momento de inercia del objeto, en este caso un cilindro. [kgm2]
w: Velocidad angular del brazo teniendo en cuenta la reducción [rad/s]
T: Torque o momento par del servomotor teniendo en cuenta la reducción. [Nm]
S: Carrera o deformación en mm del objeto elástico a ser impactado. [m]
R: Radio con respecto al punto de aplicación del momento. [m]
De las variables mencionadas S se convierte en el valor desconocido y que es una medida de la
absorción de energía del material por unidad de longitud que se deforma el material medida en
metros. Por su tenacidad, economía y oferta en el mercado elastómero es un material capaz de
cumplir esta función, para lo cual se inició una búsqueda sobre los diferentes cauchos
disponibles. Sin embargo, en el mercado nacional los diferentes proveedores no tenían a
disposición la curva de caracterización viscoelástica del material, por lo cual no era posible
encontrar la tasa de deformación por unidad de longitud en función de la velocidad para
determinado caucho. Fue necesario entonces recurrir a un segundo elemento mucho más costoso
pero disponible en el mercado y completamente caracterizado como lo son los amortiguadores de
choque. Conociendo la carrera de cada amortiguador y su respectiva capacidad de absorción de
energía, y haciendo una relación con el costo de cada uno; se encontró que los amortiguadores de
choque 0.25 MB de la serie ECO OEM de la firma MiCRO son capaces de soportar el impacto
del brazo mecánico. La memoria de cálculo que refleja los valores en la Tabla 4.
Figura 18. Amortiguador de choque OEM 0.25MB
Fuente: (Micro Pneumatic S.A., 2014)
La siguiente etapa consiste en generar alternativas de diseño para satisfacer los requerimientos
planteados, debido lo estricto del tiempo que se tiene para desarrollar el proyecto al mismo
tiempo como ya se mencionó en la sección del Límite de Carrera las etapas de diseño son
trabajadas en conjunto. Algunos de los diseños preliminares planteados y posteriormente
descartados pueden observarse en las Figura 23 y Figura 24 en la sección de Anexos. El diseño
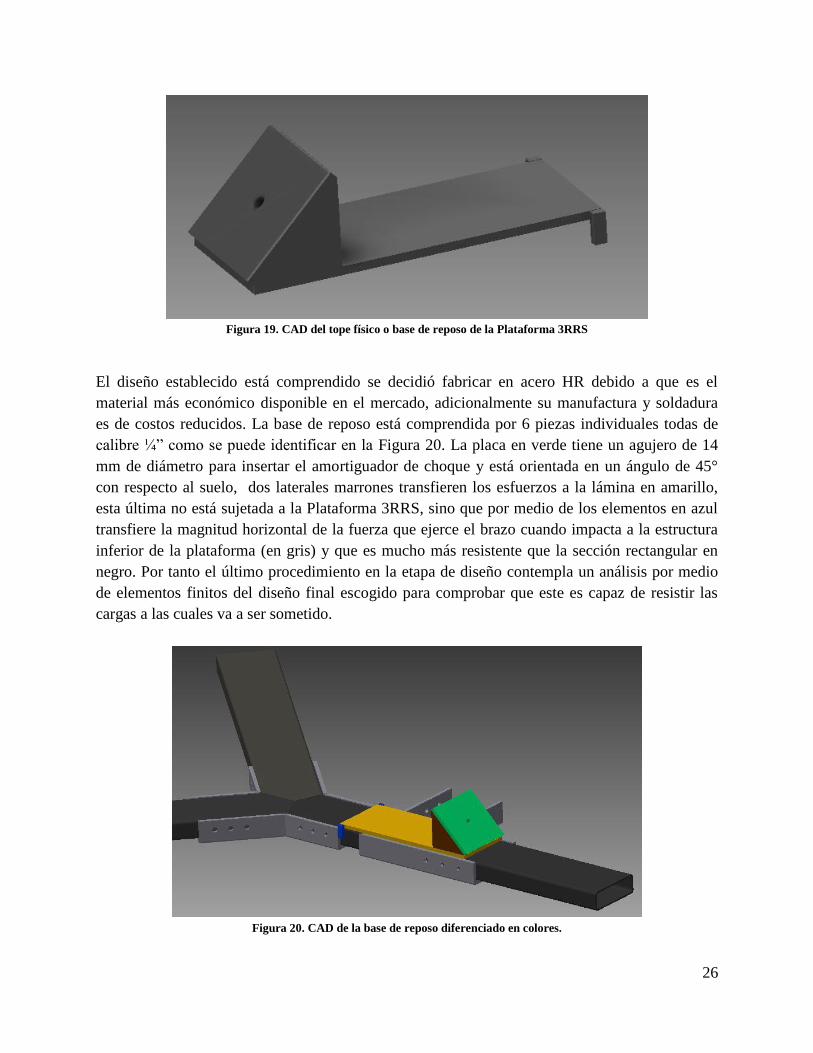
finalmente escogido se puede apreciar en la Figura 19, el agujero central que se puede observar
corresponde al lugar donde se ubicara el amortiguador de choque.
26
Figura 19. CAD del tope físico o base de reposo de la Plataforma 3RRS
El diseño establecido está comprendido se decidió fabricar en acero HR debido a que es el
material más económico disponible en el mercado, adicionalmente su manufactura y soldadura
es de costos reducidos. La base de reposo está comprendida por 6 piezas individuales todas de
calibre ¼” como se puede identificar en la Figura 20. La placa en verde tiene un agujero de 14
mm de diámetro para insertar el amortiguador de choque y está orientada en un ángulo de 45°
con respecto al suelo, dos laterales marrones transfieren los esfuerzos a la lámina en amarillo,
esta última no está sujetada a la Plataforma 3RRS, sino que por medio de los elementos en azul
transfiere la magnitud horizontal de la fuerza que ejerce el brazo cuando impacta a la estructura
inferior de la plataforma (en gris) y que es mucho más resistente que la sección rectangular en
negro. Por tanto el último procedimiento en la etapa de diseño contempla un análisis por medio
de elementos finitos del diseño final escogido para comprobar que este es capaz de resistir las
cargas a las cuales va a ser sometido.
Figura 20. CAD de la base de reposo diferenciado en colores.

27
Para realizar la simulación se utilizó la herramienta análisis de esfuerzo del software Autodesk
Inventor Professional 2015, en la cual se hizo un enmallado sobre la pieza y se aplicó una masa
de 500 kg con una aceleración lineal correspondiente al doble la velocidad angular Tabla 4
multiplicada por el radio de giro del eslabón. Es importante mencionar que se aplicó el criterio
de falla por esfuerzo último de Von Mises y se obtuvo un factor de seguridad de 6.97 para el
caso más crítico, que sería cuando los motores aceleran a toda velocidad en la dirección contraria
a la propuesta para su operación (Figura 10).
Figura 21. Simulación del CAD de la base de reposo por medio de elementos finitos.
3.3.3 Construcción de la base de reposo y montaje del tope físico.
Para la fabricación de las 18 piezas en acero HR se hicieron cortes es plasma usando los planos
arrojados por el CAD sobre una lámina de calibre ¼”, para recordar porque son 18 piezas en
total tenemos que referirnos que son 3 bases de reposo las que se fabricaron. Posteriormente se
hizo un punzonado de 9/16” sobre la lámina que sujeta el amortiguador. Finalmente se unieron
las piezas por soldadura mediante proceso MIG, con un alambre 0.35.
Para realizar el montaje se utilizaron las 2 roscas M14 que incluye cada amortiguador de choque
de fábrica y se adiciono una tuerca de seguridad del mismo diámetro para reforzar la sujeción, en
la Figura 22 se puede identificar el resultado de este proceso.
Figura 22. Base de reposo

28
4. Prueba de los mecanismos de seguridad
4.1.1 Diseño y ejecución de pruebas.
Para confirmar que los mecanismos de seguridad implementados en la Plataforma 3RRS
funcionan apropiadamente es necesario diseñar una rutina y trayectoria de prueba que ocasiona
que los componentes mecánicos de la maquina trabajen fuera de los límites de operación
definidos anteriormente.
El primer paso consiste en diseñar en MATLAB® toolbox una trayectoria de pruebas que genere
una colisión, para lo cual se estudió el código existente y se encontró que lo más viable es
generar un movimiento inesperado en la Plataforma 3RRS en dirección hacia el suelo mientras
ejecutaba una rutina ingresada por el usuario. Con lo anterior se ocasionaría un cambio
inesperado en la dirección de giro de los motores seguido por un fuerte descenso de los eslabones
2, 4 y 6 con dirección de impacto a la base de carga. Siendo consecuentes con el sistema de
seguridad con intervención por niveles planteado para la máquina, el operador lógico es el
primer mecanismo de seguridad en intervenir.
En la unidad MP2300S fueron programados un conjunto de variables que controlan las unidades
amplificadores para el manejo de los motores, por lo tanto con el operador lógico se definen
valores de torque máximo y aceleraciones angulares que no pueden ser sobrepasados. Los
resultados de esta prueba se pueden reflejar en la Tabla 1.
Tabla 1.
Resultados prueba mecanismo de seguridad de nivel 1
¿Se activó el mecanismo de seguridad?
Si No Observaciones
Prueba 1 X
Ninguna
Prueba 2 X
Ninguna
Prueba 3
X Sobre carga en la unidad MP2300S
El siguiente paso consiste en desactivar el mecanismo de seguridad de nivel 1 y probar el de
nivel 2, por lo cual es necesario eliminar los límites de software impuestos y comprobar el
funcionamiento de los sensores de proximidad. Los resultados de esta prueba se pueden observan
en la Tabla 2.

29
Tabla 2.
Resultados prueba mecanismo de seguridad nivel 2
¿Se activó el mecanismo de seguridad?
Si No Observaciones
Prueba 1 X
Revisar tiempo de respuesta
Prueba 2 X
Revisar tiempo de respuesta
Prueba 3 X
Ninguna
Finalmente es necesario comprobar el mecanismo de seguridad de nivel 3 que funciona en
conjunto con el de nivel 4 y que son el último recurso en caso de una colisión. Para esta prueba
se tomaron precauciones adicionales como operar la Plataforma 3RRS a mayor distancia y
suspender las actividades adicionales que se estuviesen realizando en el laboratorio por unos
minutos. Los resultados de la colisión de la maquina con el tope físico se pueden observar en
Tabla 3.
Resultados prueba mecanismo de seguridad nivel 3 y 4.
¿Soporto el impacto sin deformarse el tope y sin daños estructurales en la maquina?
Si No Observaciones
Prueba 1 X
Ninguna
Prueba 2 X
Ninguna
Prueba 3 X
Ninguna
4.1.2 Resultados
De las pruebas realizadas en la sección anterior se pudo observar que los mecanismos de
seguridad implementados en la plataforma 3RRS funcionan satisfactoriamente.
Analizando en preciso el caso de la prueba 3 para el nivel 1 lo que sucedió fue que el cable de
Ethernet que conecta el computador con la unidad MP2300S sufrió un jalón y se desconectó
durante la ejecución de una rutina, el operario inconscientemente volvió a conectar el cable y
cargo nuevamente la rutina, ocasionando una sobrecarga de datos en la PLC que saco de su
trayectoria preestablecida a la plataforma y que fue necesario detener por medio de la parada de
emergencia. Por lo tanto se recomienda que cuando ocurra este tipo de casos o similares cortar la
energía por medio del disyuntor.
En las pruebas 1 y 2 del nivel 2 se encontró que el tiempo de respuesta de los sensores era muy
lento y estaba frenando a muy poca distancia de una colisión a la Plataforma 3RRS, por lo que se
aumentó la aceleración de frenado con que se detienen los motores cuando se activa el límite de
carrera.

30
5. Conclusiones
El operador lógico implementado sobre la unidad de control MP2300S es capaz de integrar los
límites de software, los límites de carrera y la posición de home bajo un mismo lenguaje de
programación, el cual posee una interfaz amigable para el usuario y que se puede entender
haciendo uso de los pasos de configuración descritos en la sección Operador Lógico. Se
concibió satisfactoriamente una posición de home para la plataforma 3RRS, posición a la cual se
dirige la Plataforma 3RRS previo a la realización de cualquier trayectoria. Los valores que
quedaron establecidos por defecto son arbitrios y pueden ser cambiados en cualquier momento
por medio de las variables mencionadas en la sección Operador Lógico.
El funcionamiento del sistema de sensores es comprobado antes que la plataforma realice
cualquier movimiento, siendo esta comprobación de seguridad necesaria para garantizar que el
sistema funciona en lazo cerrado y no permite que la plataforma opere en caso que este elemento
de seguridad este desconectado o presente fallos.
Los topes físicos cumplen satisfactoriamente su función de doble propósito, absorbiendo las
colisiones que pueda sufrir la plataforma cuando esta es sometida a una trayectoria que impacta
físicamente los componentes de la máquina, adicionalmente son capaces de brindar una posición
de reposo apropiada y que no afecta las condiciones iniciales del robot.
Finalmente se considera que los mecanismo de seguridad implementados son pertinentes y no
reducen el rango de operación de la Plataforma 3RRS, permitiéndole a esta realizar sus
trayectorias normalmente pero siempre bajo la vigilancia de los 4 niveles de seguridad
establecidos. Se recomienda a los usuarios siempre tener un grado de precaución ante la
operación de la Plataforma 3RRS, ya que no deja de ser un robot bajo operación humana y por
tanto es imposible garantizar que esté exento de fallos.

31
6. Anexos
Figura 23. Diseño preliminar que consideraba tope físico de caucho convencional.
Figura 24. Diseño preliminar que consideraba montar el sensor junto con el tope físico.
Tabla 4.
Memoria de cálculos para la selección del amortiguador de choque
Impacto de Giro (Con par)
Masa [kg] 500
Longitud Brazo [m] 0.8
Velocidad Angular (1500rpm) [rpm] 23.438
Velocidad [m/s] 1.963
Diámetro [mm] 35
Momento Inercia Cilindro [kg*m^2] 0.613
Par Motor (5Nm) [Nm] 300.00
Carrera Amortiguador Hidráulico [m] 0.005
Energía Cinética [J] 1.845
Energía de Empuje [J] 1.875
Energía Total [J] 3.720

32
Tabla 5.
Arreglo de cableado y conectores. Fuente: Tabla 14.4.12 (MP2300iec Hardware Manual YEA-SIA-IEC-2Q, 2013)

33
Bibliografía ELECTRICAS BOGOTA LTDA . (s.f.). Electricas Bogota LTDA. Recuperado el 10 de 09 de
2014, de http://www.electricasbogota.com/detalles/proximidad/261-prcm18-5dn
Flammini, A., Ferrari, P., Marioli, D., Sisinni, E., & Taroni, A. (2009). Wired and wireless
sensor networks for industrial applications. University of Brescia, Deparment of
Electronics for the Automation. Castellanza, Italia: Microelectronics Journal.
Goldenberg, N., & Wool, A. (2013). Accurate modeling of Modbus/TCP for intrusion. School of
Electrical Engineering, Tel Aviv University. Ramat Aviv, Israel: Internation Journal of
critical Infrastructure Protection.
Hibbeler, R. (2006). Mecanica de Materiales. (J. d. Alonso, Trad.) Naucalpan de Juarez, Mexico:
Pearson Educacion de Mexico.
Merlet, J. (2006). Parallel Robots, Solid Mechanics and Its Applications (Segunda ed.). Springer.
Obtenido de http://www.parallemic.org/Terminology/General.html
Micro Pneumatic S.A. (2014). Catalogo Master Capitulo Cilindros. Bogota: © Copyright 2014
Micro.
MinTrabajo. (10 de 09 de 2012). Ministerio del Trabajo Republica de Colombia. Recuperado el
18 de 04 de 2014, de http://www.mintrabajo.gov.co/septiembre-2012/1006-qcon-la-
nueva-ley-de-riesgos-laborales-habra-mas-salud-y-proteccion-para-los-trabajadores-
colombianosq-mintrabajo.html
Suarez, R. (1998). Sistema de Seguridad del Robot Andes 1. Tesis Pregrado, Universidad de los
Andes, Departamento de Ingenieria Mecanica, Bogota D.C.
Universidad de los Andes. (1 de 12 de 2007). Reglamento de Higiene y Seguridad Industrial,
Secretaria General Universidad de los Andes. Recuperado el 18 de 04 de 2014, de
http://secretariageneral.uniandes.edu.co/images/documents/Reglamento%20de%20Higie
ne%20y%20Seguridad%20Industrial%20Uniandes.pdf
Yaskawa Robotics. (Febrero de 2013). MP2300iec Hardware Manual YEA-SIA-IEC-2Q.
Recuperado el 02 de 09 de 2014, de https://www.yaskawa.com/pycprd/products/machine-
controllers/mp-series/mp2300/tab2/link20
Yaskawa Robotics. (s.f.). Yaskawa America, Inc. Recuperado el 15 de 09 de 2014, de
https://www.yaskawa.com/pycprd/products/machine-controllers/mp-series/mp2300