
DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA REPORTE DE ...148.206.53.84/tesiuami/UAMI12509.pdf ·...
25
UNIVERSIDAD AUTÓNOMA METROPOLITANA IZTAPALAPA DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA REPORTE DE PROYECTO TERMINAL “SISTEMA DE CONTROL DIRIGIDO POR UN OPERADOR A DISTANCIA” • ALUMNO: ALEXANDER MONTENEGRO AVELLANEDA. • ASESOR: DR. FAUSTO MARCOS CASCO SÁNCHEZ. Noviembre de 2005
Transcript of DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA REPORTE DE ...148.206.53.84/tesiuami/UAMI12509.pdf ·...
UNIVERSIDAD AUTÓNOMA METROPOLITANA IZTAPALAPA
DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA
REPORTE DE PROYECTO TERMINAL
“SISTEMA DE CONTROL DIRIGIDO POR UN OPERADOR A
DISTANCIA”
• ALUMNO: ALEXANDER MONTENEGRO AVELLANEDA.
• ASESOR: DR. FAUSTO MARCOS CASCO SÁNCHEZ.
Noviembre de 2005

1
Capítulo 1.Introducción…………………………………………………………… ..2
1.1 Objetivo General……………………………………………………………. 2 1.2 Objetivos Específicos……………………………………………………..….2 1.3 Algunas Definiciones………………………………………………………...2
o Variable Controlada y Variable Manipulada………………………...2 o Sistemas de control de lazo abierto………………………………..…3 o Sistema de control de lazo cerrado………………………………..…3
Capítulo 2. Sistema de Control…………………………………………………..…..4 2.1 R(s) Referencia del sistema…………………………………………..…..5 2.2 E(s) Entrada del sistema………………………………………..……..….5
2.2.1 Mando a distancia………………………………………..…...5 2.2.2 Teléfono inalámbrico doméstico…………………………..…5 2.2.3 Sistema de marcación telefónico…………………..………....5 2.2.4 Mapeo de órdenes en el teclado del teléfono……………...….7
2.3 G(s) Acciones del sistema……………………………………………..…8
2.3.1 Recepción de la orden………………………………….…..…8 o Simulador de línea telefónica……………………..….8
2.3.2 Decodificación……………………………………………..…9 o Decodificador DMTF LC7385…………………..….10
2.3.3 Lógica de Control………………………………………..….11
2.3.3.1 Microcomputadoras……………………..…..11 2.3.3.2 Microcontrolador PIC16F877…………..…...13 2.3.3.3 Programa de Control……………………...…15
2.4 H(s) Módulo de retroalimentación…………………………………..….17
2.5 C(s) Salida del sistema……………………………………………...…..18 2.5.1 Motores…………………………………………………...…18 2.5.2 Motores CD para control………….…………………….…..18 2.5.3 Desplazamiento del sistema, apertura y cierre de la pinza.…19 2.5.4 Interfaz de Potencia……………………………....................19
o Puente H……………………..……………………...19 o Controlador LMD18201………..………………..…20
Capítulo 3. Pruebas y resultados…………………………………………………....22 Capítulo 4. Conclusiones…………………………………………………….…..…23 Capítulo 5. Referencias……………………………………………………..………24
2
Capítulo I. Introducción
En la actualidad es muy común la presencia y utilización de sistemas de control por computadora en prácticamente todas las ramas del conocimiento y también en la vida diaria habiéndose convertido en algo tan habitual que ni siquiera lo notamos. Los sistemas de control por computadora son ampliamente utilizados en la industria ofreciendo múltiples ventajas como la reducción de tiempo de fabricación y entrega de la producción.
Los sistemas de control pueden ser automáticos o dirigidos por un operador, esto de acuerdo al tipo de tarea que el sistema realice, un ejemplo práctico de un sistema de control automático lo encontramos en los estacionamientos de los principales centros comerciales, sin embargo hay algunas tareas que requieren de una vigilancia humana constante por lo cual los sistemas de control dirigidos por un operador son fundamentales.
El presente trabajo consiste en el desarrollo de un sistema de control dirigido por un operador a distancia el cual puede servir para múltiples fines como manejo de materiales peligrosos, ayuda a discapacitados, etc. El sistema desarrollado también se puede utilizar como una plataforma de prueba para una amplia gama de dispositivos como son sensores, cámaras de video, etc. 1.1 Objetivo General:
Desarrollar un sistema de control dirigido por un operador a distancia.
1.2 Objetivos Específicos:
El sistema debe:
a. Ser útil para múltiples aplicaciones. b. Tener un largo alcance de operación. c. Tener un tamaño reducido. d. Ser capaz de realizar trabajos en intervalos largos de tiempo. e. Tener capacidad de carga (para componentes adicionales u otros objetos
pequeños). f. Ser económico.
1.3 Algunas Definiciones:
a. Variable Controlada y Variable Manipulada:
La variable controlada es la cantidad o condición que se mide y controla.
La variable manipulada es la cantidad o condición modificada por el controlador a fin de afectar la variable controlada. Control significa medir el valor de la variable controlada del sistema y aplicar al sistema la variable manipulada para corregir o limitar la desviación del valor medido, respecto al valor deseado. Un ejemplo de variable controlada puede ser la posición del eje de un motor y la variable manipulada sería la corriente que alimenta a dicho motor para obtener una cierta posición.

3
b. Sistemas de control de lazo abierto
Se denomina así a los sistemas de control donde la salida no tiene efecto
sobre la acción de control, en un sistema de control de lazo abierto, la salida no se mide ni retroalimenta para compararla con la entrada. Un ejemplo práctico lo constituye una lavadora de ropa domestica. El remojo, lavado y enjuague se cumplen por tiempos. La máquina no mide la señal de salida, es decir la limpieza de la ropa. c. Sistema de control de lazo cerrado:
Se conocen también como sistemas de control retroalimentado y son
aquellos que tiende ha mantener alguna relación preestablecida entre la salida y una entrada de referencia, comparándolas y utilizando la referencia como medio de control. Por ejemplo en el control de velocidad de un automóvil a través de un operador humano, el conductor decide la velocidad adecuada a la situación, que puede ser la establecida como límite máximo para la ruta o camino en que se desplaza. Esta velocidad actúa como velocidad de referencia, el conductor observa la velocidad que efectivamente lleva mirando el velocímetro, si viaja muy lentamente oprime el acelerador y el vehículo aumenta su velocidad. Si la velocidad que lleva es demasiado alta, disminuye la presión sobre el pedal del acelerador y el vehículo reduce su velocidad. Éste es un sistema de control retroalimentado con un operador humano. En algunos casos como el que mencionamos el operador puede ser fácilmente reemplazado por algún dispositivo mecánico o eléctrico sin embargo en algunos otros es difícil poder sustituir el conjunto de razonamientos y acciones de un operador.
4
Capítulo II. Sistema de Control El sistema desarrollado permite el control a distancia de su desplazamiento y la apertura y cierre de una pinza mecánica para agarrar objetos pequeños.
El mencionado sistema se puede clasificar como un sistema de lazo cerrado
controlado por un operador, lo cual significa que la retroalimentación no se ejecuta de manera automática si no que en este punto es el operador humano quien ajusta la salida del sistema, es decir la posición del sistema móvil y la apertura y cierre de la pinza del mismo.
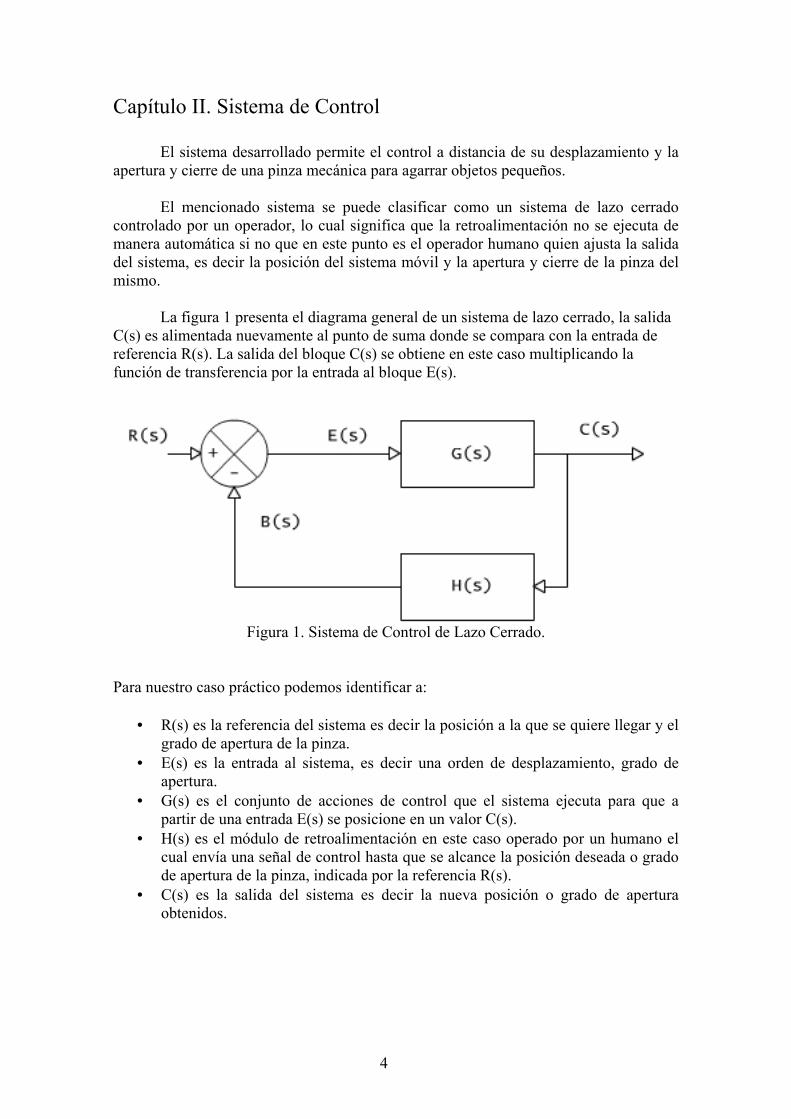
La figura 1 presenta el diagrama general de un sistema de lazo cerrado, la salida C(s) es alimentada nuevamente al punto de suma donde se compara con la entrada de referencia R(s). La salida del bloque C(s) se obtiene en este caso multiplicando la función de transferencia por la entrada al bloque E(s).
Figura 1. Sistema de Control de Lazo Cerrado.
Para nuestro caso práctico podemos identificar a:
• R(s) es la referencia del sistema es decir la posición a la que se quiere llegar y el grado de apertura de la pinza.
• E(s) es la entrada al sistema, es decir una orden de desplazamiento, grado de apertura.
• G(s) es el conjunto de acciones de control que el sistema ejecuta para que a partir de una entrada E(s) se posicione en un valor C(s).
• H(s) es el módulo de retroalimentación en este caso operado por un humano el cual envía una señal de control hasta que se alcance la posición deseada o grado de apertura de la pinza, indicada por la referencia R(s).
• C(s) es la salida del sistema es decir la nueva posición o grado de apertura obtenidos.
5
2.1 R(s) o Referencia del Sistema.
Para nuestro caso es sencillamente la acción que el operador quiere ejecutar con el sistema móvil. La acción puede ser el desplazamiento del sistema mismo o el grado de apertura de la pinza, o una combinación de ambos.
2.2 E(s) o Entrada del Sistema.
El operador emite una orden al sistema que tiene que ser interpretada y generar un desplazamiento o grado de apertura de la pinza. La orden se ejecuta a distancia a través de un mando o control remoto.
2.2.1 Mando a distancia.
Características deseables del mando a distancia:
• Largo alcance. • Baja relación señal a ruido, es decir procurar ser lo menos inmune a la
interferencia. En el presente trabajo se empleó como mando a distancia un teléfono
inalámbrico domestico que opera a una frecuencia de 2.4 GHz y tiene un alcance máximo de 1 Km. en línea de vista (es decir sin obstáculos). Para facilitar el entendimiento del funcionamiento del sistema se explica brevemente el funcionamiento de un teléfono inalámbrico doméstico y el sistema de marcación telefónico.
2.2.2 Teléfono inalámbrico doméstico.
Los teléfonos inalámbricos domésticos constan de 2 partes
fundamentales: el teléfono y la base. La base se mantiene conectada a la línea telefónica y envía la señal a través de radiofrecuencia al teléfono que puede estar fijo o en movimiento. Los teléfonos inalámbricos domésticos del mismo modo que los teléfonos fijos realizan los siguientes procesos fundamentales:
• Marcación. • La transferencia de voz (conversación). • Finalización de la comunicación.
La parte empleada para enviar las órdenes al sistema es la etapa de
marcación, es decir usando el teclado del teléfono se envía diferentes comandos a la base, que posteriormente serán interpretados para efectuar de este modo el control del sistema.
2.2.3 Sistema de Marcación Telefónico.
Podemos distinguir dos tipos: • Marcación por pulsos. • Marcación por tonos.
6
Marcación por pulsos:
La marcación por pulsos o también conocida como marcación
decádica por pulsos consiste en el envío por el teléfono de la información numérica, en forma de pulsos, a la central telefónica para que ésta establezca una conexión con el teléfono deseado.
Los pulsos los genera el teléfono mediante un dispositivo mecánico denominado disco de marcar, el cual consiste en un disco giratorio provisto de diez agujeros numerados del 0 al 9.
En la actualidad, aunque las centrales telefónicas siguen aceptando este tipo de marcación, se utiliza mayormente la marcación por tonos que es mucho más eficiente.
Marcación por tonos:
El sistema de marcación por tonos o sistema multifrecuencia de doble
tono (DTMF :Dual-Tone Multi-Frequency), funciona con un teclado en el cual cuando se presiona la tecla correspondiente al dígito que se quiere marcar, se envían dos tonos de distinta frecuencia, que la central decodifica, detectando instantáneamente el dígito que se marcó.
Este sistema ha sustituido casi en su totalidad al de marcación por pulsos debido a sus múltiples ventajas (facilidad de marcado, rapidez, etc.).
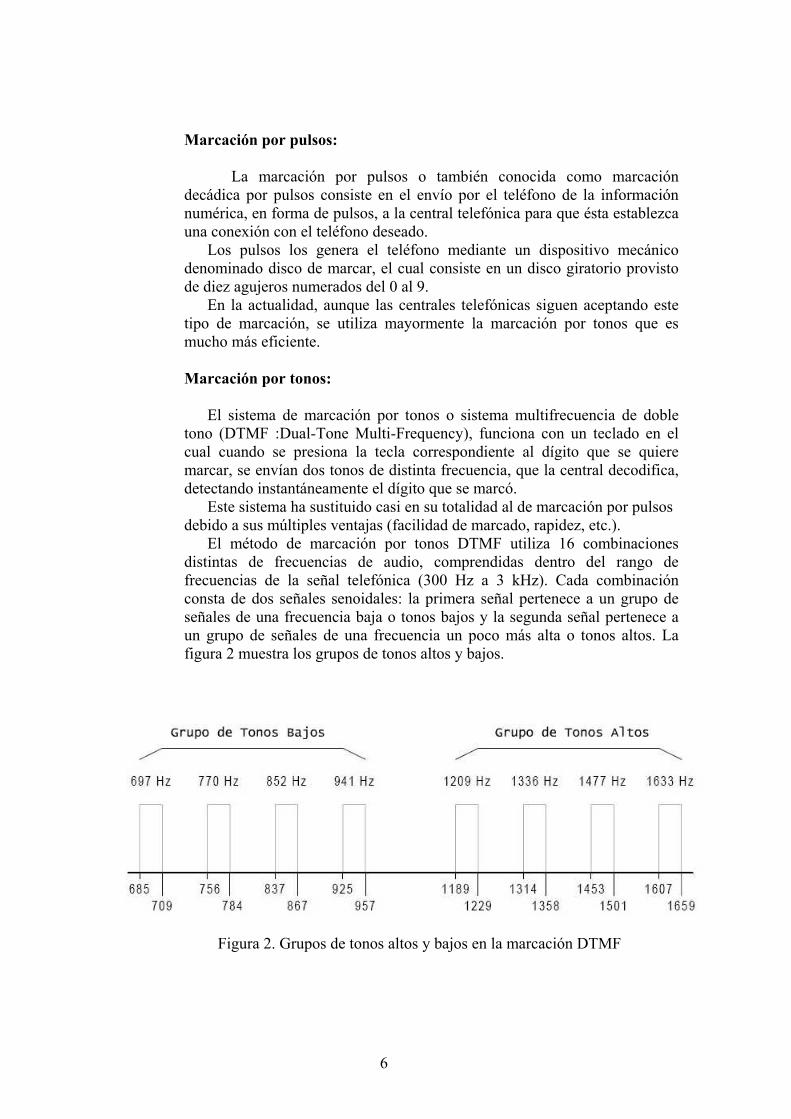
El método de marcación por tonos DTMF utiliza 16 combinaciones distintas de frecuencias de audio, comprendidas dentro del rango de frecuencias de la señal telefónica (300 Hz a 3 kHz). Cada combinación consta de dos señales senoidales: la primera señal pertenece a un grupo de señales de una frecuencia baja o tonos bajos y la segunda señal pertenece a un grupo de señales de una frecuencia un poco más alta o tonos altos. La figura 2 muestra los grupos de tonos altos y bajos.
Figura 2. Grupos de tonos altos y bajos en la marcación DTMF
7
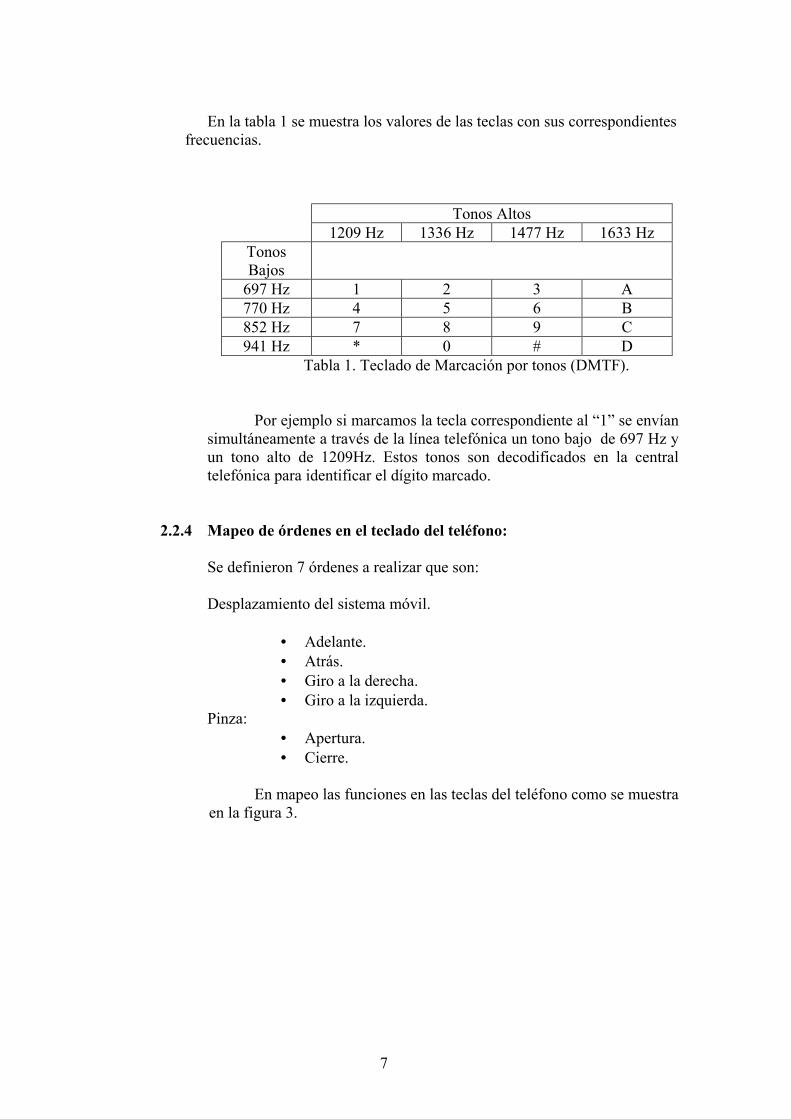
En la tabla 1 se muestra los valores de las teclas con sus correspondientes
frecuencias.
Tonos Altos 1209 Hz 1336 Hz 1477 Hz 1633 Hz
Tonos Bajos
697 Hz 1 2 3 A 770 Hz 4 5 6 B 852 Hz 7 8 9 C 941 Hz * 0 # D
Tabla 1. Teclado de Marcación por tonos (DMTF).
Por ejemplo si marcamos la tecla correspondiente al “1” se envían simultáneamente a través de la línea telefónica un tono bajo de 697 Hz y un tono alto de 1209Hz. Estos tonos son decodificados en la central telefónica para identificar el dígito marcado.
2.2.4 Mapeo de órdenes en el teclado del teléfono:
Se definieron 7 órdenes a realizar que son: Desplazamiento del sistema móvil.
• Adelante. • Atrás. • Giro a la derecha. • Giro a la izquierda.
Pinza: • Apertura. • Cierre.
En mapeo las funciones en las teclas del teléfono como se muestra en la figura 3.

8
Figura 3. Mapeo de órdenes en el teclado del teléfono.
2.3 G(s) Acciones del Sistema.
Las acciones del sistema consisten en el proceso mediante el cual se transforma una orden emitida por el operador en una señal de control en este caso para los motores que ponen en movimiento al sistema y se encargan de la apertura y cierre de la pinza.
Podemos distinguir las siguientes etapas:
• Recepción de la orden. • Decodificación • Lógica de Control.
2.3.1 Recepción de la orden.
La etapa de recepción consta de la base del teléfono inalámbrico, para el
desarrollo de esta etapa se requiere simular la señal de una línea telefónica puesto que la base está diseñada para operar solamente al detectar la línea. Simulador de línea telefónica:
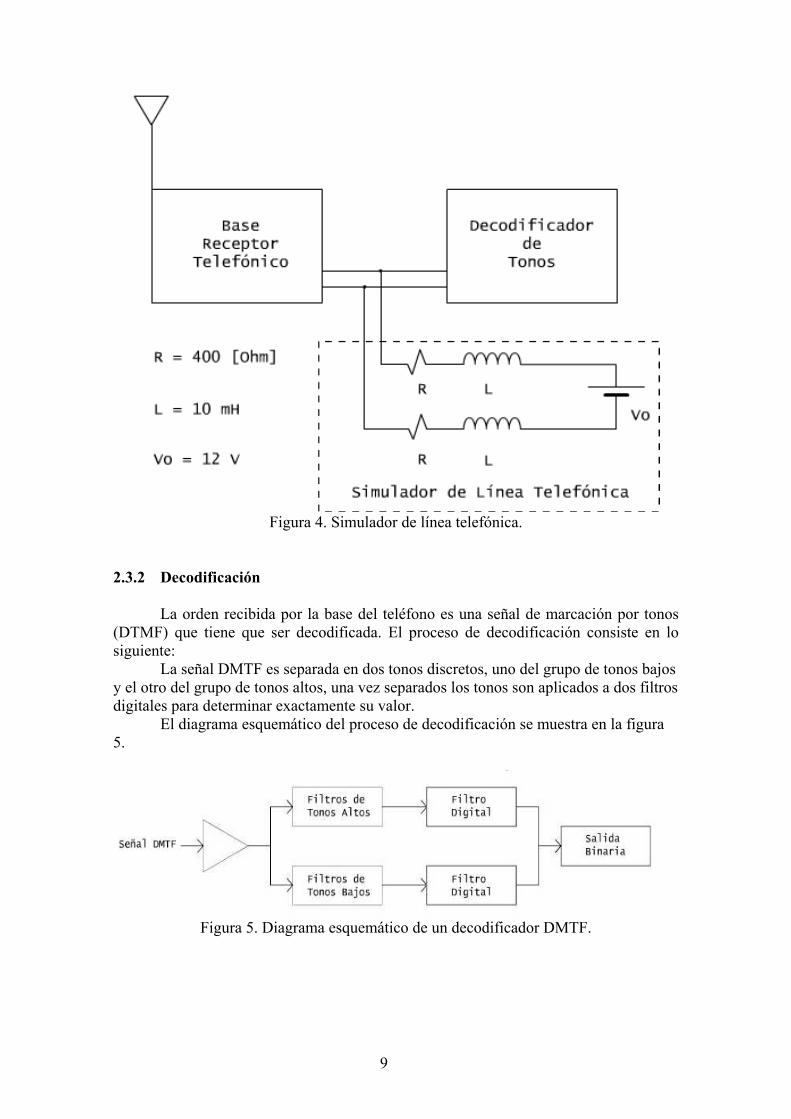
Una central telefónica consta de un número elevado de componentes que en su conjunto representan un sistema de gran complejidad. En está etapa solamente se simula el voltaje proporcionado por dicha central cuando se descuelga el auricular. La figura 4 muestra el circuito utilizado para simular la línea telefónica.
9
Figura 4. Simulador de línea telefónica.
2.3.2 Decodificación
La orden recibida por la base del teléfono es una señal de marcación por tonos
(DTMF) que tiene que ser decodificada. El proceso de decodificación consiste en lo siguiente:
La señal DMTF es separada en dos tonos discretos, uno del grupo de tonos bajos y el otro del grupo de tonos altos, una vez separados los tonos son aplicados a dos filtros digitales para determinar exactamente su valor.
El diagrama esquemático del proceso de decodificación se muestra en la figura 5.
Figura 5. Diagrama esquemático de un decodificador DMTF.

10
En el mercado existen varios integrados decodificadores DTMF de características similares como son: LC7385 (Sanyo), HM9270 (EMC), CD22204 (Intersil). Se eligió utilizar el LC7385 por su bajo precio. Decodificador DMTF LC7385
El LC7385 es un receptor DTMF que integra los filtros y las funciones de decodificación digital para obtener los 16 dígitos del teclado. Características:
• Alimentación de 5V. • Entrada tipo amplificador diferencial. • Filtros integrados. • Filtro de tono dual. • Filtro de tonos altos. • Filtro de tonos bajos. • Posibilidad de elegir el formato de salida (hexadecimal o binario). • Salidas de 3 estados, de este modo se facilita la conexión con un
microcontrolador El circuito armado de acuerdo a las hojas de especificaciones del fabricante se muestra en la figura 6.
Figura 6. Circuito decodificador DMTF LC7385. Los resultados de la decodificación se muestran en la tabla 2.

11
Tabla 2. Tabla de decodificación. Donde FL = Tonos Bajos (Hz). Donde FH = Tonos Altos (Hz). H = 1 lógico ó 5V. L = 0 lógico ó 0V. 2.3.3 Lógica de Control
La traducción de las órdenes en señales capaces de controlar un dispositivo
electromecánico (motores) se realizó utilizando una microcomputadora. Para este caso usamos un microcontrolador de 8 bits de arquitectura Harvard, el
microcontrolador utilizado es el PIC16F877.
2.2.3.1 Microcomputadoras:
Podemos Identificar 2 tipos principales:
Microprocesadores:
Se utilizan principalmente en los sistemas informáticos (e. computadoras personales) en donde están involucrados grandes volúmenes de datos, la capacidad de procesamiento es repartida entre varios procesos que se atienden a la vez. Tienen costos elevados de acuerdo a sus características y requieren de varios dispositivos adicionales para operar.
FL FH TECLA Binario Hexadecimal
Q4 Q3 Q2 Q1 Q4 Q3 Q2 Q1 697 1209 1 L L L H L L L L 697 1336 2 L L H L L L L H 697 1477 3 L L H H L L H L 770 1209 4 L H L L L H L L 770 1336 5 L H L H L H L H 770 1477 6 L H H L L H H L 852 1209 7 L H H H H L L L 852 1336 8 H L L L H L L H 852 1477 9 H L L H H L H L 941 1366 0 H L H L H H L H 941 1209 * H L H H H H L L 941 1477 # H H L L H H H L 697 1633 A H H L H L L H H 770 1633 B H H H L L H H H 852 1633 C H H H H H L H H 941 1633 D L L L L H H H H

12
Microcontroladores:
Se utilizan principalmente en los sistemas mínimos (pequeños volúmenes de datos) y son utilizados para control en tiempo real, debido a que atienden a un solo proceso. Tienen costos bajos y son ideales para aplicaciones de pequeña a mediana complejidad.
Arquitectura general de una microcomputadora:
Una microcomputadora consta básicamente de las siguientes partes: • Unidad Central de Procesos (CPU): Es la parte principal y se encarga de
interpretar las instrucciones de un programa y coordinar su ejecución, además controla el proceso de transferencia de información.
• Dispositivos de Almacenamiento de información (memoria). • Buses de comunicación. • Dispositivos de comunicación externa (puertos de entrada-salida). Un esquema general se muestra en la figura 7.
Figura 7. Arquitectura general de una microcomputadora.
Arquitecturas:
Las arquitecturas principales son las siguientes:
Arquitectura Princeton o Von Newman:
Su principal característica consiste en poseer un bus común
llamado bus de datos usado para la transmisión de datos e instrucciones.
Arquitectura Harvard.
En esta estructura la memoria de programa (pasiva) está separada
de la memoria de datos (activa), teniéndose dos buses de comunicación: bus de datos y un bus de instrucciones. Lo cual significa que como los buses son independientes, el CPU puede estar accediendo a los datos para completar la ejecución de una instrucción, y al mismo tiempo estar leyendo la próxima instrucción a ejecutar.
Ventajas:

13
• El tamaño de las instrucciones no esta relacionado con el de los datos, y por lo tanto puede ser optimizado para que cualquier instrucción ocupe una sola posición de memoria de programa, logrando así mayor velocidad.
• El tiempo de acceso a las instrucciones puede superponerse con el tiempo de acceso a los datos, logrando una mayor velocidad de operación.
Microcontroladores PIC
Esta familia de microcontroladores fabricados por Microchip, se divide en tres subfamilias como se muestra en la tabla 3.
Subfamilia Bits del bus de instrucciones
Nomenclatura
Básica 12 PIC12XXX,PIC14XXX Media 14 PIC16XXX Alta 16 PIC17XXX, PIC18XXX
Tabla 3. Subfamilias de los microcontroladores PIC de Microchip. Las Características Generales de la familia PIC son:
• Arquitectura Harvard • Tecnología RISC • Tecnología CMOS
Estas características se reúnen para lograr un dispositivo altamente eficiente en el uso de la memoria de datos y de programa y por lo tanto en la velocidad de ejecución.
2.3.3.2 Microcontrolador PIC16F877.
Breve Descripción:
Se eligió al microcontrolador PIC16F877 por su número de puertos de entrada-salida, bajo costo además y facilidad para ser programado. El microcontrolador PIC16F877 pertenece a la gama media (Tabla 3) que corresponde a microcontroladores de 8 bits (bus de datos) que tienen las siguientes características generales que los distinguen: Características Generales del Microcontrolador:
• CPU RISC de alto rendimiento. • Solamente 35 instrucciones.

14
• Todas las instrucciones se ejecutan en un ciclo de reloj, excepto los saltos que requieren de dos instrucciones.
• Frecuencia de operación: o Reloj de entrada: 20 MHz. o Ciclo de instrucción: 200 ns.
• Hasta 8k x 14 bits de memoria Flash de programa. • Hasta 368 x 8 bytes de memoria de datos (RAM). • Hasta 256 x 8 bytes de memoria de datos (EEPROM). • Hasta 14 fuentes de interrupción. • Pila de hardware de 8 niveles. • Reset de encendido (POR). • Timer de encendido (PWRT). • Timer de arranque del oscilador (OST). • Sistema de vigilancia Watchdog timer. • Protección programable de código. • Modo SLEEP de bajo consumo de energía. • Opciones de selección del oscilador. • Programación y depuración serie “In-Circuit” (ICSP) a través de dos
pines. • Lectura / escritura de la CPU a la memoria flash de programa. • Rango de voltaje de operación de 2.0 a 5.5 volts. • Rangos de temperatura: Comercial, Industrial y Extendido. • Bajo consumo de potencia:
o Menos de 2 mA a 5V, 4 Mhz o 20 µA a 3V, 32 Khz o Menos de 1µA corriente de standby.
Periféricos
• Dos módulos de Captura, Comparación y PWM. • Convertidor Analógico/Digital: de 10 bits, hasta 8 canales. • Puerto Serie Síncrono (SSP). • Puerto Serie Universal (USART/SCI). • Puerto Paralelo Esclavo (PSP) de 8 bits. • Timer0: Contador/Temporizador de 8 bits con pre-escalador de 8 bits. • Timer1: Contador/Temporizador de 16 bits con pre-escalador. • Timer0: Contador/Temporizador de 8 bits con pre-escalador y post-
escalador de 8 bits y registro de periodo.
Estructura general del PIC16F877
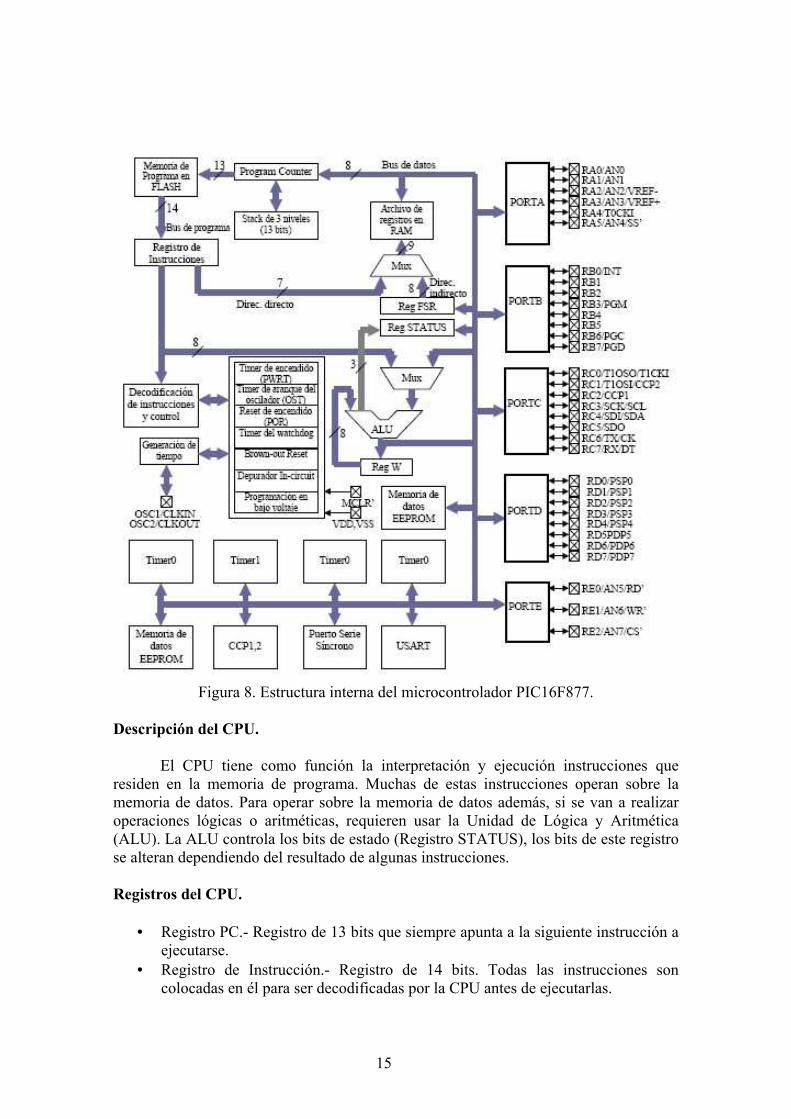
En la Figura 8 se muestra un diagrama con la estructura interna del microcontrolador PIC16F877.
15
Figura 8. Estructura interna del microcontrolador PIC16F877.
Descripción del CPU.
El CPU tiene como función la interpretación y ejecución instrucciones que
residen en la memoria de programa. Muchas de estas instrucciones operan sobre la memoria de datos. Para operar sobre la memoria de datos además, si se van a realizar operaciones lógicas o aritméticas, requieren usar la Unidad de Lógica y Aritmética (ALU). La ALU controla los bits de estado (Registro STATUS), los bits de este registro se alteran dependiendo del resultado de algunas instrucciones. Registros del CPU.
• Registro PC.- Registro de 13 bits que siempre apunta a la siguiente instrucción a ejecutarse.
• Registro de Instrucción.- Registro de 14 bits. Todas las instrucciones son colocadas en él para ser decodificadas por la CPU antes de ejecutarlas.
16
• Registro W.- Registro de 8 bits que guarda resultados temporales de las operaciones realizadas por la ALU.
• Registro STATUS.- Registro de 8 bits, cada uno de sus bits (denominados Banderas) es un indicador de estado de la CPU o del resultado de la última operación.
2.2.3.3 Programa de Control
Podemos distinguir dos etapas fundamentales: • Configuración. • Flujo del programa.
Configuración: Es necesario configurar los puertos, las instrucciones utilizadas se resumen de la manera siguiente:
• Puerto B como salida. • Puerto A digital. • Puerto A como salida.
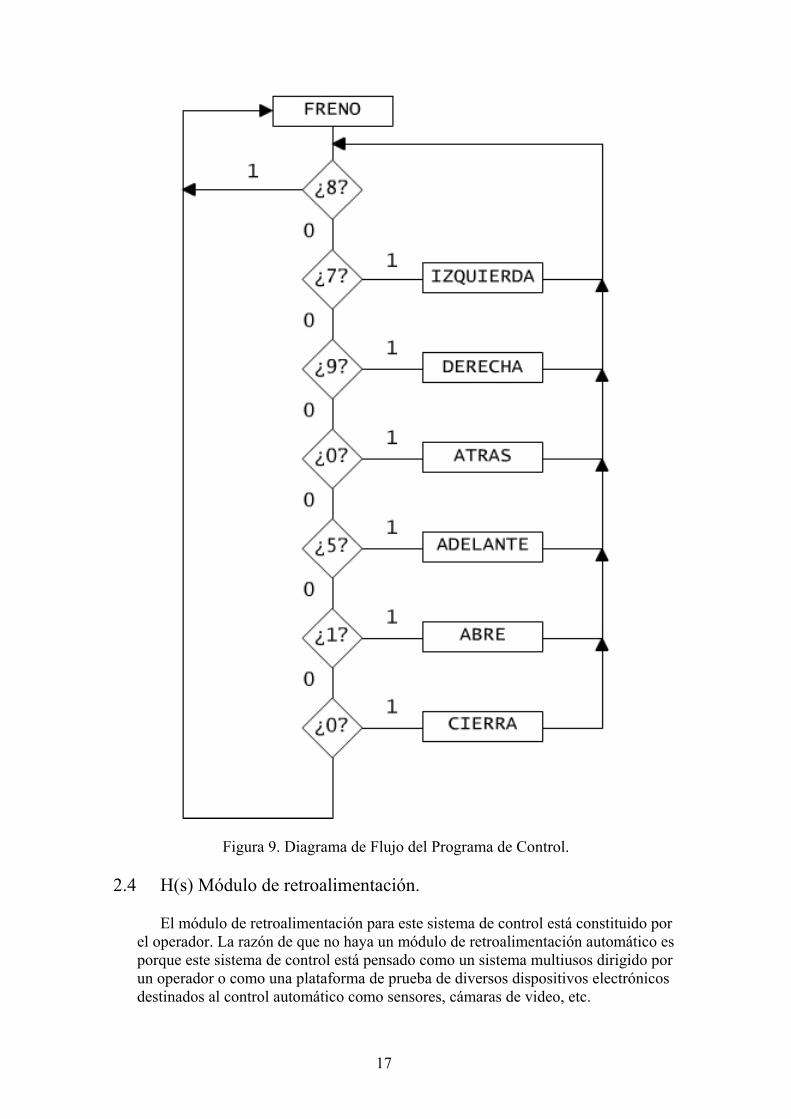
Flujo del programa: El programa se encarga de revisar la orden enviada y ejecutar el código correspondiente a cada orden. El diagrama de flujo del programa se muestra en la figura 9.
17
Figura 9. Diagrama de Flujo del Programa de Control.
2.4 H(s) Módulo de retroalimentación. El módulo de retroalimentación para este sistema de control está constituido por el operador. La razón de que no haya un módulo de retroalimentación automático es porque este sistema de control está pensado como un sistema multiusos dirigido por un operador o como una plataforma de prueba de diversos dispositivos electrónicos destinados al control automático como sensores, cámaras de video, etc.

18
2.5 C(s) Salida del sistema. La salida del sistema está constituida por un desplazamiento o grado de apertura de la pinza para lo cual es necesario dispositivos electromecánicos (motores).
2.5.1 Motores.
En el mercado existen varios de tipos de motores. Para efectos del desarrollo del presente proyecto nos vamos a enfocar a los motores eléctricos.
Conceptos básicos:
Torque de arranque: es la fuerza con que gira el eje de un motor partiendo del reposo. Motores Eléctricos: su función es transformar energía eléctrica en energía mecánica.
Motores de Corriente Alterna (CA):
• Motores Síncronos. Solo giran a la velocidad determinada por la frecuencia de la corriente.
• Motores Asíncronos. Se pueden desviar muy poco de la velocidad de giro determinada por la frecuencia y no necesitan un arranque especial. A veces se denominan motores sin escobillas o sin colector.
Motores de Corriente Directa (CD):
El funcionamiento de un motor CD se basa en la acción de campos magnéticos opuestos que hacen girar el rotor (eje interno) en dirección opuesta al estator (imán externo o bobina), al mantener fija el armazón del motor el rotor con el eje de salida será lo único que gire.
Para cambiar la dirección de giro en un motor de CD tan solo tenemos que invertir la polaridad de la alimentación del motor. Para modificar su velocidad podemos variar su tensión de alimentación con lo que el motor perderá velocidad, pero también perderá par de giro (fuerza). Existe una variedad muy amplia de motores de corriente continua, los más utilizados para aplicaciones de posicionamiento en máquinas pequeñas se listan a continuación.
2.5.2 Motores CD para control.
Los motores CD más usados en aplicaciones de control son los
siguientes: • Servomotores. • Motores de Pasos. • Moto-reductores.
Servomotores:
Los servomotores se caracterizan por ser pequeños y potentes (alto torque de arranque), dispone en su interior de un motor con un reductor de velocidad y multiplicador de fuerza, también dispone de un
19
circuito interno que controla el sistema. El recorrido del eje de salida es de 180º en la mayoría de los casos. Son ampliamente utilizados en juguetes de radio control para manejar las alas de los aviones y las direcciones de los carros. Son caros en general y difíciles de conseguir. Motores de Pasos:
Los Motores de Pasos se caracterizan porque es posible mover su eje en posiciones fijas o pasos, pudiendo mantener la posición. Esto se logra teniendo por un lado el rotor constituido por un imán permanente y por el otro el estator construido por bobinas, al energizar una bobina se atrae al polo magnético opuesto del rotor manteniéndolo en una posición fija hasta que se energice la bobina contigua y el rotor avance un “paso” más. Los motores de Pasos permiten un control preciso de la posición del eje, por lo cual son utilizados en aplicaciones de robótica, sin embargo tienen costos elevados. Moto-reductores:
Los moto-reductores se caracterizan por su elevado torque de arranque. Esto se debe a que tienen internamente un arreglo de engranes que hacen una transformación de velocidad en fuerza, lo que quiere decir que un motor común DC puede ser transformado en un moto-reductor que tendrá un cierto factor (ganancia) de fuerza, pero inverso al factor de velocidad. Están presentes en muchas aplicaciones y son fáciles de conseguir y de precios accesibles.
2.5.3 Desplazamiento del sistema, apertura y cierre de la pinza:
Para nuestro sistema se emplearon dos moto-reductores para el
desplazamiento del vehículo y otro adicional para la pinza. Los motores utilizados en el desarrollo del presente trabajo son de rehúso y trabajan con un voltaje máximo de 50V DC. 2.5.4 Interfaz de Potencia:
Los moto-reductores DC utilizados necesitan ser alimentados de manera
especial para que puedan girar en ambos sentidos (bi-direccional). Un circuito ampliamente utilizado para el control bi-direccional de un motor es el Puente H.
Puente H: Es un circuito que permite controlar un motor de corriente directa
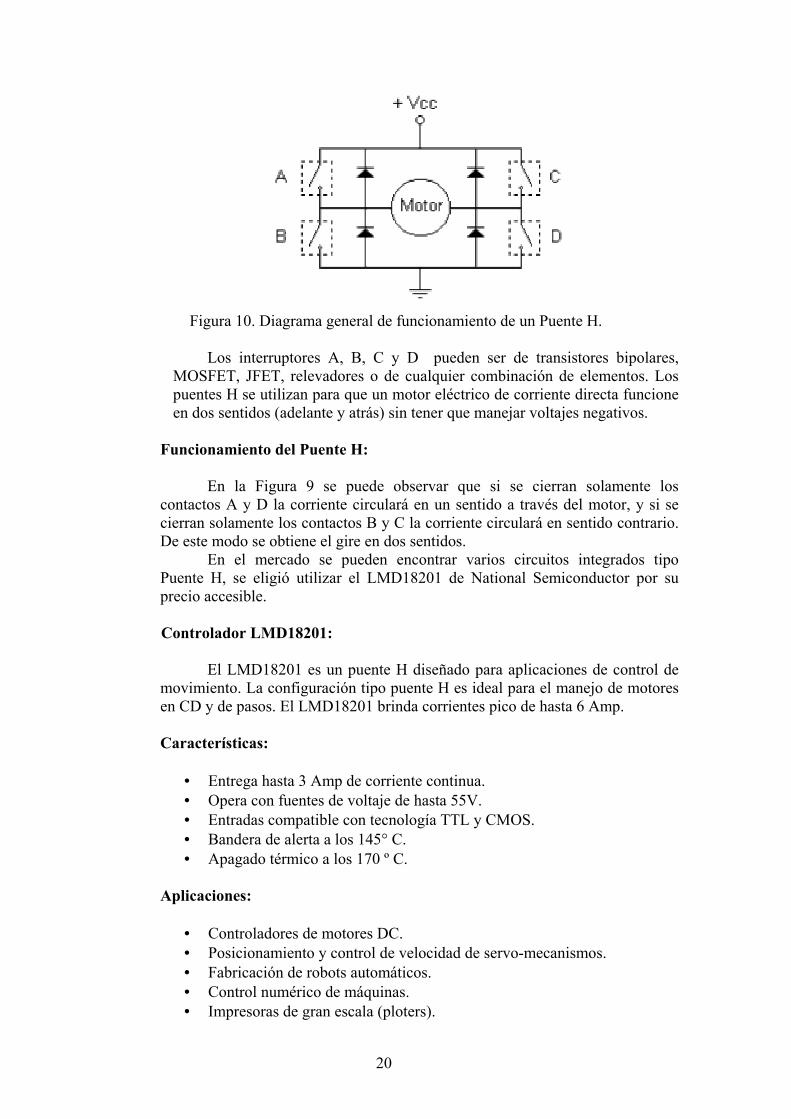
en dos direcciones desde una entrada digital (TTL,CMOS). El diagrama general de funcionamiento se muestra en la figura 10.
20
Figura 10. Diagrama general de funcionamiento de un Puente H.
Los interruptores A, B, C y D pueden ser de transistores bipolares, MOSFET, JFET, relevadores o de cualquier combinación de elementos. Los puentes H se utilizan para que un motor eléctrico de corriente directa funcione en dos sentidos (adelante y atrás) sin tener que manejar voltajes negativos.
Funcionamiento del Puente H:
En la Figura 9 se puede observar que si se cierran solamente los
contactos A y D la corriente circulará en un sentido a través del motor, y si se cierran solamente los contactos B y C la corriente circulará en sentido contrario. De este modo se obtiene el gire en dos sentidos.
En el mercado se pueden encontrar varios circuitos integrados tipo Puente H, se eligió utilizar el LMD18201 de National Semiconductor por su precio accesible.
Controlador LMD18201:
El LMD18201 es un puente H diseñado para aplicaciones de control de movimiento. La configuración tipo puente H es ideal para el manejo de motores en CD y de pasos. El LMD18201 brinda corrientes pico de hasta 6 Amp. Características:
• Entrega hasta 3 Amp de corriente continua. • Opera con fuentes de voltaje de hasta 55V. • Entradas compatible con tecnología TTL y CMOS. • Bandera de alerta a los 145° C. • Apagado térmico a los 170 º C.
Aplicaciones:
• Controladores de motores DC. • Posicionamiento y control de velocidad de servo-mecanismos. • Fabricación de robots automáticos. • Control numérico de máquinas. • Impresoras de gran escala (ploters).
21
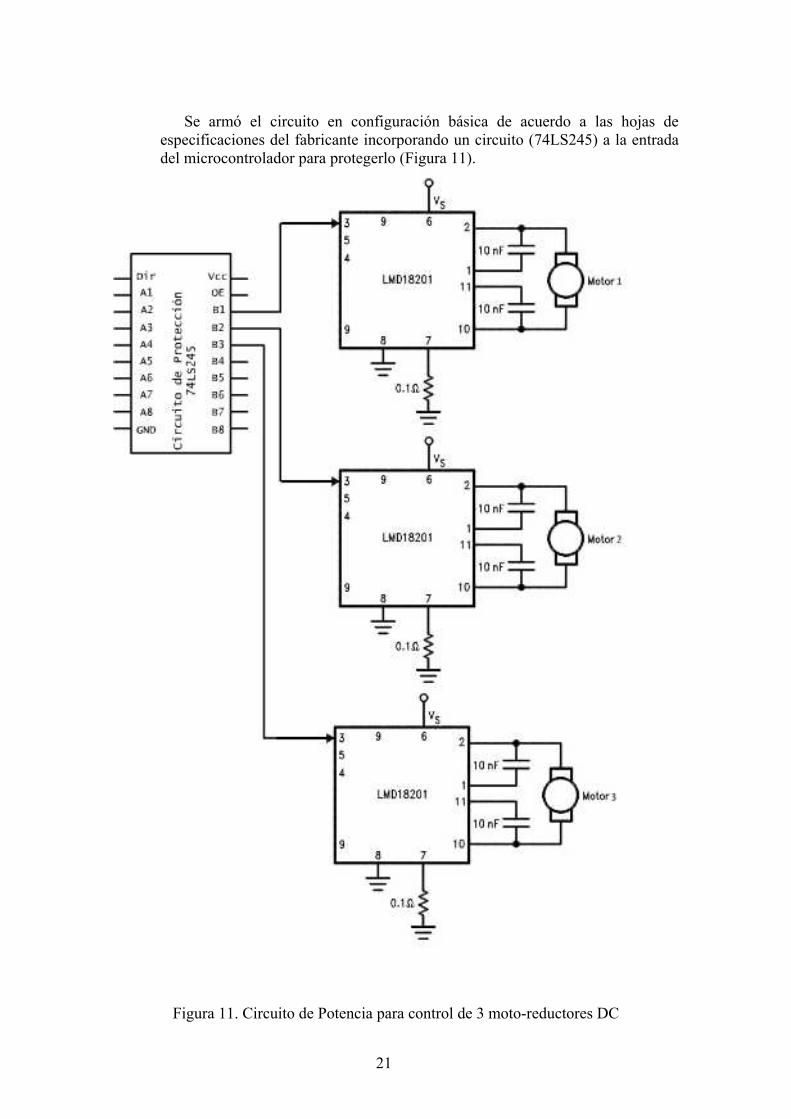
Se armó el circuito en configuración básica de acuerdo a las hojas de
especificaciones del fabricante incorporando un circuito (74LS245) a la entrada del microcontrolador para protegerlo (Figura 11).
Figura 11. Circuito de Potencia para control de 3 moto-reductores DC
22
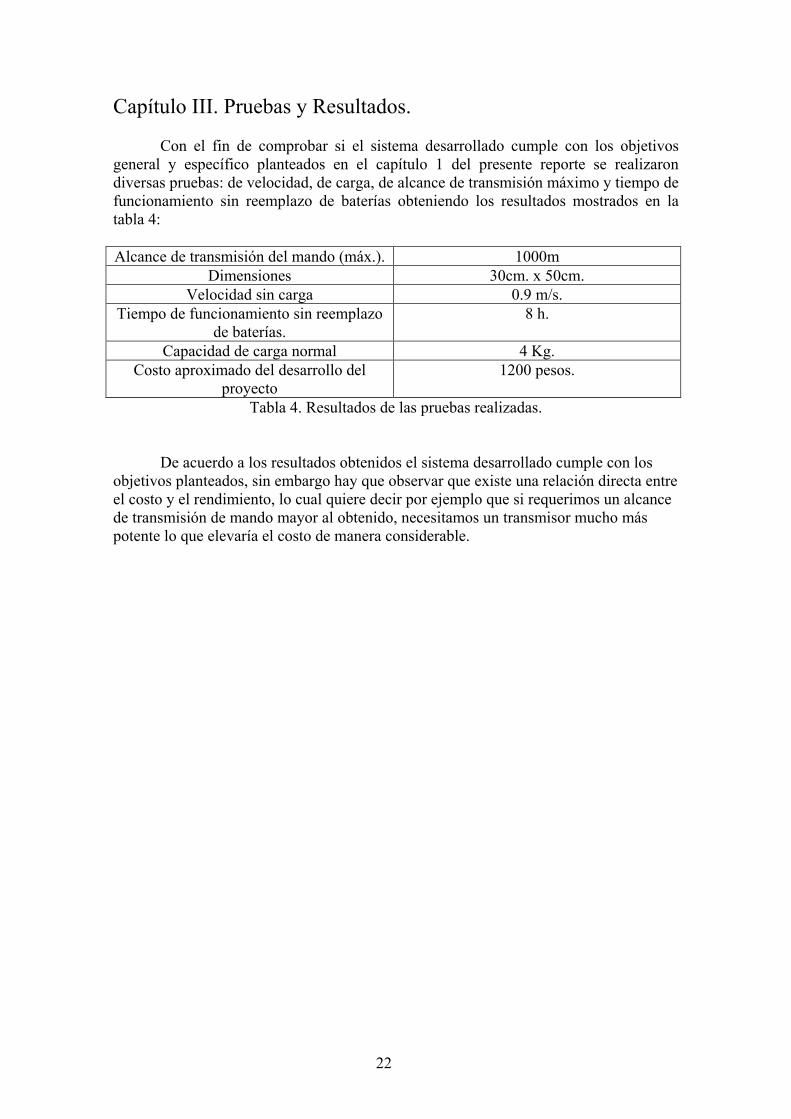
Capítulo III. Pruebas y Resultados. Con el fin de comprobar si el sistema desarrollado cumple con los objetivos
general y específico planteados en el capítulo 1 del presente reporte se realizaron diversas pruebas: de velocidad, de carga, de alcance de transmisión máximo y tiempo de funcionamiento sin reemplazo de baterías obteniendo los resultados mostrados en la tabla 4: Alcance de transmisión del mando (máx.). 1000m
Dimensiones 30cm. x 50cm. Velocidad sin carga 0.9 m/s.
Tiempo de funcionamiento sin reemplazo de baterías.
8 h.
Capacidad de carga normal 4 Kg. Costo aproximado del desarrollo del
proyecto 1200 pesos.
Tabla 4. Resultados de las pruebas realizadas.
De acuerdo a los resultados obtenidos el sistema desarrollado cumple con los objetivos planteados, sin embargo hay que observar que existe una relación directa entre el costo y el rendimiento, lo cual quiere decir por ejemplo que si requerimos un alcance de transmisión de mando mayor al obtenido, necesitamos un transmisor mucho más potente lo que elevaría el costo de manera considerable.

23
Capítulo IV. Conclusiones.
El sistema desarrollado puede ser usado en una gran variedad de aplicaciones como el manejo a distancia de materiales peligrosos garantizando la seguridad del operador, también puede servir como una herramienta para personas discapacitadas, para la exploración de zonas de difícil acceso, como herramienta de prueba para diferentes tipos de sensores o simplemente como un prototipo de juguete.
La versatilidad del sistema consiste en la facilidad de re-programación del
microcontrolador PIC para que pueda ser utilizado en diferentes tareas, también su velocidad y capacidad de carga permiten incorporarle una gran variedad de elementos adicionales como celdas solares, sensores, cámaras de video o cualquier tipo de herramienta de manipulación basada en motores eléctricos o pistones neumáticos.
Como una mejora inmediata al sistema se propone agregarle una cámara de
video con el fin de monitorear de una manera más efectiva la acción a realizar, por ejemplo en el caso de exploración de ductos para determinar fugas, sería muy útil ir observando la trayectoria del sistema.
Una observación importante es que el mando a distancia estuvo constituido
básicamente por un transmisor comercial (el teléfono inalámbrico doméstico), siendo que no está diseñado para esta función tuvo que hacérsele las adaptaciones descritas en la sección 2.3, obteniendo así el transmisor con las características deseadas.

24
Capítulo V. Referencias.
1. José Ma. Angulo Usategui, Microcontroladores Pic, (Mac.Graw Hill, 2000). 2. Katsuhiko Ogata, Ingeniería de Control Moderna, (Prentice Hall, 1993). 3. George D.Kraft, Mini/Microcomputer Hardware Design, , (Prentice Hall, 1979).


















