DINÁMICA NO LINEAL DE VIGAS DE PARED DELGADA …torres/trabajosparapublicacion/02-analisis_e... ·...
20
DINÁMICA NO LINEAL DE VIGAS DE PARED DELGADA CONSIDERANDO DEFORMACIÓN POR CORTE Sebastián P. Machado y Víctor H. Cortínez Grupo Análisis de Sistemas Mecánicos, Universidad Tecnológica Nacional (FRBB), 11 de Abril 461, 8000, Bahía Blanca, Argentina, [email protected], [email protected], http://www.frbb.utn.edu.ar/gasm. Palabras clave: vigas, pared delgada, estabilidad dinámica, no linealidad geométrica. Resumen: En este trabajo se investiga la dinámica no lineal de una viga simplemente apoyada de sección monosimétrica y sometida a una excitación externa en resonancia con el primer modo flexo- torsional. En particular se analiza la interacción modal debido a no linealidades geométricas que acoplan fundamentalmente los modos que aparecen desacoplados desde el punto de vista lineal. El fenómeno de resonancia interna es considerado a partir de la relación que existe entre la frecuencia del segundo y tercer modo con la del primer modo de 2:1 y 3:1, respectivamente. El método de escalas múltiples es utilizado para obtener seis ecuaciones diferenciales ordinarias de primer orden que describen la modulación de las amplitudes y fases de los modos interactuando entre sí. La solución numérica de estas últimas ecuaciones permitió ilustrar el comportamiento de la viga a través de curvas de respuesta en frecuencia. El análisis se basa en un modelo viga geométricamente no lineal que contempla como aspecto distintivo la flexibilidad de corte en forma completa, la cual ha demostrado tener una influencia crucial en el comportamiento dinámico. A partir de dicha formulación es posible estudiar las soluciones de equilibrio y analizar su estabilidad, encontrado que la respuesta de la viga puede ser muy compleja consistente en movimientos periódicos, aperiódicos o caóticos en algunos casos.
Transcript of DINÁMICA NO LINEAL DE VIGAS DE PARED DELGADA …torres/trabajosparapublicacion/02-analisis_e... ·...

DINÁMICA NO LINEAL DE VIGAS DE PARED DELGADA CONSIDERANDO DEFORMACIÓN POR CORTE
Sebastián P. Machado y Víctor H. Cortínez
Grupo Análisis de Sistemas Mecánicos, Universidad Tecnológica Nacional (FRBB), 11 de Abril 461, 8000, Bahía Blanca, Argentina, [email protected], [email protected],
http://www.frbb.utn.edu.ar/gasm.
Palabras clave: vigas, pared delgada, estabilidad dinámica, no linealidad geométrica.
Resumen: En este trabajo se investiga la dinámica no lineal de una viga simplemente apoyada de sección monosimétrica y sometida a una excitación externa en resonancia con el primer modo flexo-torsional. En particular se analiza la interacción modal debido a no linealidades geométricas que acoplan fundamentalmente los modos que aparecen desacoplados desde el punto de vista lineal. El fenómeno de resonancia interna es considerado a partir de la relación que existe entre la frecuencia del segundo y tercer modo con la del primer modo de 2:1 y 3:1, respectivamente. El método de escalas múltiples es utilizado para obtener seis ecuaciones diferenciales ordinarias de primer orden que describen la modulación de las amplitudes y fases de los modos interactuando entre sí. La solución numérica de estas últimas ecuaciones permitió ilustrar el comportamiento de la viga a través de curvas de respuesta en frecuencia. El análisis se basa en un modelo viga geométricamente no lineal que contempla como aspecto distintivo la flexibilidad de corte en forma completa, la cual ha demostrado tener una influencia crucial en el comportamiento dinámico. A partir de dicha formulación es posible estudiar las soluciones de equilibrio y analizar su estabilidad, encontrado que la respuesta de la viga puede ser muy compleja consistente en movimientos periódicos, aperiódicos o caóticos en algunos casos.
1 INTRODUCCIÓN
En el diseño estructural moderno, la utilización de estructuras livianas y rígidas ha aumentado considerablemente en los últimos años. Consecuentemente las vigas de pared delgada se emplean muy frecuentemente. La introducción de materiales compuestos en la tecnología de construcción ha mostrado grandes ventajas desde el punto de vista de la relación entre la rigidez y el peso como también debido a otras propiedades mejoradas, por ejemplo la alta resistencia a la corrosión. En este trabajo se estudian la dinámica no-lineal de vigas de pared delgada sometidas a una carga de excitación forzada. El interés en comprender el comportamiento dinámico de estructuras esbeltas de pared delgada se ha ido incrementando notablemente, como se manifiesta en la literatura científica de los últimos años. Este interés se debe fundamentalmente a la creciente utilización de dichas estructuras en la tecnología moderna. En sistemas continuos tales como estructuras, las no linealidades acoplan fundamentalmente los modos que aparecen desacoplados desde el punto de vista lineal, y este acoplamiento puede conducir a interacciones modales, resultando en la transferencia de energía entre los modos. Existen experimentos demostrando que en algunos casos la energía es transferida desde un modo de alta frecuencia que es directamente excitado, hacia un modo de baja frecuencia. Este fenómeno puede ser extremadamente peligroso debido a que la amplitud de la respuesta del modo de baja frecuencia puede ser muy grande comparada con la del modo de alta frecuencia que es directamente excitado. Además, en presencia de acoplamiento modal la reacción de la estructura a una simple excitación armónica puede ser una respuesta simple armónica o una respuesta muy compleja consistente en el acoplamiento de muchos modos y exhibiendo movimientos indeseables, tal como oscilaciones caóticas. Por lo tanto, a menos que este tipo de respuesta sea completamente entendida y considerada en el diseño de una estructura, pueden ocurrir resultados impredecibles que en algunos casos pueden ser catastróficos.
Las interacciones modales pueden ser el resultado de resonancia interna (autoparamétrica), combinación de resonancia externa, combinación de resonancia paramétrica o interacciones no resonantes. Las resonancias internas pueden ocurrir en sistemas donde las frecuencias naturales lineales ωi son proporcionales o prácticamente proporcionales entre sí. Cuando la no linealidad del sistema es cúbica, pueden ocurrir resonancias internas si ωn ≈ ωm, ωn ≈ 3ωm, ωn
≈ |2ωm ± ωk |, o ωn ≈ |ωm ± ωk ± ωl |. Cuando la no linealidad es cuadrática, además de las resonancias antes mencionadas, ocurren resonancias internas si ωn ≈ 2ωm, ωn ≈ ωm ± ωk. Para una comprensiva revisión de este tipo de interacción modal se puede recurrir a la bibliografía realizada por Nayfeh y Mook (1979), Nayfeh y Balanchandran (1989), y Nayfeh (1996). Realizando una breve revisión de algunos estudios, se puede mencionar a Nayfeh et al. (1974) y Sridhar et al. (1975) quienes estudiaron la respuesta a resonancias primarias tanto del primer como el segundo modo de vigas uniformes en condición apoyada-empotrada. Nayfeh et al. (1987) analizaron la respuesta de este tipo de vigas sometidas a una excitación primaria del primer modo. Ellos consideraron una carga estática axial y un resorte de restricción en uno de los extremos. Lau et al. (1989) estudiaron la respuesta de una viga apoyada-empotrada sometida a una excitación resonante primaria del primer modo y a una combinación de resonancia sub-armónica de los primeros dos modos, mientras que Chen et al. (1989) estudiaron la respuesta de la viga a una excitación resonante del primer o el segundo modo. En los últimos cinco trabajos, se utilizó el método de escalas múltiples para determinar cuatro ecuaciones diferenciales no lineales ordinarias de primer orden describiendo las amplitudes y fases de los dos modos interactuando. Además, estudiaron el equilibrio de esas ecuaciones de modulación y determinaron su estabilidad. La interacción entre el movimiento flexional y
torsional fue estudiado por Crespo da Silva y Glynn (1978), para el caso donde la frecuencia torsional es mucho más alta que las flexionales. Pernjin et al. (1990) investigaron la respuesta no plana de una viga cantilever sometida a una excitación armónica lateral, para el caso de resonancias internas y una resonancia primaria, utilizando dos ecuaciones de movimiento no lineales acopladas. La interacción flexional-flexional-torsional en una viga con frecuencias flexionales y torsionales comparables fue considerada por Luongo et al. (1989), Crespo da Silva et al. (1994 a y b) y Benedettini et al. (1999). Luongo et al. (1989) analizaron el acoplamiento no lineal en el movimiento libre, mientras que Crespo da Silva et al. (1994 a y b), el movimiento forzado en condiciones de resonancia interna. Benedettini et al. (1999) analizaron la dinámica tridimensional de una viga cantilever con una sección compacta sometida a una fuerza vertical sinusoidal en su extremo libre, bajo varias condiciones de resonancia interna involucrando modos flexionales y torsionales, y comparando resultados experimentales y analíticos.
Todos los trabajos citados anteriormente son referidos esencialmente a vigas de secciones compactas donde la simetría no tiene importancia. En relación a vigas de pared delgada sólo se puede mencionar el trabajo realizado recientemente por Di Egidio et al. (2003 a y b). Ellos consideraron una viga monosimétrica no deformable por corte para analizar el comportamiento dinámico flexional-flexional-torsional. Utilizaron el método de escalas múltiples para obtener las ecuaciones de modulación, considerando el caso de resonancia interna cúbica y cuadrática. Mediante el análisis de respuesta en frecuencia determinaron la influencia de algunos términos no lineales sobre el comportamiento dinámico de una viga simplemente apoyada. Ellos consideraron que la frecuencia de excitación estaba cercana a la frecuencia del segundo modo (flexional). En este trabajo se estudia el comportamiento dinámico de una viga de pared delgada a partir de la extensión de una formulación no lineal previamente desarrollado por los autores (Machado y Cortínez, 2005a). Como aspecto distintivo dicho modelo contempla, entre otros efectos, la flexibilidad de corte en forma completa, la cual ha demostrado tener una influencia crucial en el comportamiento dinámico. En el análisis se considera una viga simplemente apoyada sometida a una carga periódica, donde la frecuencia de excitación es cercana a la frecuencia del primer modo (flexo-torsional). Mediante la formulación no lineal se estudia la posibilidad de ocurrencia de acoplamiento modal y resonancia interna del tipo 3:1 y 2:1. Se utiliza el método de escalas múltiples para obtener seis ecuaciones diferenciales no lineales ordinarias de primer orden que describen la interacción entre las amplitudes y fases de los tres modos considerados. A partir de estas últimas se estudian las soluciones de equilibrio, su estabilidad y se encuentra que la respuesta de la viga puede ser muy compleja consistente en movimientos periódicos, aperiódicos o caóticos en algunos casos.
2 TEORÍA
2.1 Cinemática
Se considera una viga recta de paredes delgadas construida con material compuesto (Figura 1). Los puntos del elemento estructural son referidos a un sistema cartesiano ortogonal ( )zyx ,, donde el eje x es paralelo al eje longitudinal de la viga, mientras que y y z son los ejes principales de la sección. Por otra parte y y z son paralelos a los principales pero teniendo su origen en el centro de corte. Las coordenadas correspondientes a puntos ubicados sobre la línea media de la sección se denotan mediante letras mayúscula Y y Z (o Y y Z ). También se utilizan las coordenadas curvilíneas s (coordenada circunferencial) y n (coordenada normal) sobre la superficie media de la sección.

Figura 1. Sistema de coordenadas y notación para las medidas de desplazamientos.
El modelo estructural utilizado en este trabajo está basado en las siguientes hipótesis: a) El contorno de la sección transversal es rígida en su propio plano b) La distribución de alabeo se representa mediante la función de Saint-Venant de vigas
isótropas. c) Las rotaciones flexionales son moderadas, el giro de la sección transversal pueden ser
arbitrariamente grande y las deformaciones son pequeñas. d) Los esfuerzos y momentos resultantes sobre el espesor de la pared, correspondientes a
la tensión circunferencial σss se suponen despreciables. Asimismo se desprecia la fuerza resultante sobre el espesor relacionada con γns.
e) La curvatura de superficie media de la sección transversal es despreciable f) Se idealiza la sección de la viga, formada por una secuencia de placas de espesor
constante.
De acuerdo a las hipótesis enunciadas, el campo de desplazamiento adoptado se expresa de la siguiente manera:
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
cos sen cos sen sen
sen cos
sen cos
x o z y y z y z y z z 0 y 0
2y z z y
2z y z y
1u u y z z y2
1u v z y 1 y z21u w y z 1 z y2
θ φ θ φ θ φ θ φ ω θ θ θ θ θ θ θ φ
φ φ θ θ θ
φ φ θ θ θ
′ ′= − + − − + − − + −
= − − − − +
= + − − − +
(1)
Así pues, el comportamiento cinemático de una viga puede representarse adecuadamente por medio de siete variables o desplazamientos generalizados. Estos desplazamientos generalizados corresponden a tres corrimientos u0, v, w y tres rotaciones θz, θy, φ como magnitudes vectoriales y a una magnitud θ que pondera el alabeo no uniforme a lo largo del eje de la viga (Figura 1). Estos desplazamientos generalizados determinan los cuatro movimientos básicos desacoplados de una viga recta: extensional (u0), flexional lateral (v,θz),
z
CG
CC
z0
y0
y
x
z
y
V L
z θ
y −θ
v
w
φ
ou
θ

flexional transversal (w,θy) y torsional (φ,θ ). Los casos en que se pueda verificar desacoplamiento de los cuatro movimientos en una viga, son por ejemplo en secciones con doble simetría y con materiales especialmente ortótropos. Por otra parte, ω representa la función de alabeo de la sección transversal y el superíndice “prima” indica derivación con respecto a x. Los desplazamientos con respecto al sistema curvilíneo (x, s, n) pueden ser expresados de la siguiente manera:
( , , )xU u x s n= (2)
( , , ) ( , , )y zdY dZV u x s n u x s nds ds
= + (3)
( , , ) ( , , )y zdZ dYW u x s n u x s nds ds
= − + (4)
2.2 Campo de Deformación
Las tres componentes εxx, εxs, εxn no nulas del tensor de deformación de Green Lagrange se determinan a partir de las siguientes expresiones:
2 2 2
xxU 1 U V Wx 2 x x x
ε ∂ ∂ ∂ ∂ = + + + ∂ ∂ ∂ ∂
(5)
xs1 U V U U V V W W2 s x x s x s x s
ε ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= + + + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ (6)
xn1 U W U U V V W W2 n x x n x n x n
ε ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= + + + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ (7)
Sustituyendo las expresiones (1) en (2-4) y luego en (5-7), y después de simplificar algunos términos de orden superior, se llega a las siguientes expresiones para el tensor de deformación
( ) ( )
( ) ( )
( )
0 1xx xx xx
0 1xs xs xs xs
0xn xn xn
n
2 n
2
ε ε κ
γ ε γ κ
γ ε γ
= +
= = +
= =
(8)
donde
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) cos sen
cos sen + sen
0 2 2 2xx o o p z y y z y o y z o z
2 2 2z o z y o y 0 z 0 y
1 1u u v w Z u u2 2
1Y u u Y Z z y2
ε ω θ θ θ θ θ θ θ φ θ θ φ
θ θ φ θ θ φ φ θ θ φ
′ ′ ′ ′ ′ ′′ ′′ ′ ′ ′ ′ ′ ′= + + + + − − + − − + +
′ ′ ′ ′ ′ ′ ′ ′ ′+ − − − + + + −
(9)
( ) ( ) ( ) ( )
( )
( ) cos sen cos sen
1xx z 0 z y 0 y y 0 y z 0 z
2z y y z
dZ dYu u u uds ds
1l r2
κ θ θ φ θ θ φ θ θ φ θ θ φ
θ θ θ θ θ φ
′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′= − − + − + + − − + +
′ ′′ ′′ ′− − − −
(10)
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) cos sen
cos sen
0xs z 0 z 0 z y y z y 0 y
y 0 y 0 z y y z z 0 z z y y z
dY 1v u z w u rds 2dZ 1 1w u y v uds 2 2
γ θ θ φ θ θ θ θ θ θ φ ψ φ θ
θ θ φ θ θ θ θ θ θ φ ψ φ θ θ θ θ
′ ′ ′ ′ ′ ′ ′= − − − − + − − + − − ′ ′ ′ ′ ′ ′ ′ ′ ′+ − − + − − − − + − −
(11)
( )( ) 1xs z y y z
122
κ φ θ θ θ θ ′ ′ ′= − − − (12)

( ) ( ) ( )
( ) ( ) ( ) ( )
( ) cos sen
cos sen
0xn y 0 y 0 z y y z z 0 z
z 0 z 0 z y y z y 0 y
dY 1w u y v uds 2dZ 1v u z w u lds 2
γ θ θ φ θ θ θ θ θ θ φ
θ θ φ θ θ θ θ θ θ φ φ θ
′ ′ ′ ′ ′ ′= − − + − − − − ′ ′ ′ ′ ′ ′ ′− − − − − + − − + −
(13)
2.3 Formulación Variacional
Teniendo en cuenta las hipótesis adoptadas, el principio de trabajos virtuales para una lámina compuesta puede expresarse en la forma:
( )( )
( ) ( ) ( ) ( ) ( )
( ) ( )
( ) (
0 1 0 1 0xx xx xx xx xs xs xs xs xn ns
x x y y z z
x x y y z z x x y y z z x 0
x x y y z z xx L
N M N M N ds dx
u u u u u u ds dn dx
q u q u q u ds dx p u p u p u ds dn
p u p u p u ds dn f u
δε δκ δγ δκ δγ
ρ δ δ δ
δ δ δ δ δ δ
δ δ δ δ
=
=
+ + + +
− + +
− + + − + +
− + + −
∫∫∫∫∫∫∫ ∫∫∫∫ ) x y y z zf u f u ds dn dx 0δ δ+ + =∫∫∫
(14)
donde Nxx, Nxs, Mxx, Mxs y Nxn son las resultantes de tensión definidas mediante las expresiones
( )
( )
/ / /
/ / /
/ /
/ /
, , ,
,
e 2 e 2 e 2
xx xx xx xx xs xse 2 e 2 e 2
e 2 e 2
xs xs xn xne 2 e 2
N dn M n dn N dn
M n dn N dn
σ σ σ
σ σ
− − −
− −
= = =
= =
∫ ∫ ∫∫ ∫
(15)
La viga está sometida a la acción de fuerzas superficiales por unidad de área xq , yq y zq actuando según las direcciones x, y y z respectivamente. De la misma forma xp , yp y zp son fuerzas por unidad de superficie actuando en los extremos de la viga, x = 0 y x = L, donde L es la longitud de la viga. Por otra parte xf , yf y zf son fuerzas por unidad de volumen, mientras que xu , yu y zu son desplazamientos correspondientes a puntos sobre la línea media de la sección.
2.4 Ecuaciones Constitutivas
Las ecuaciones constitutivas para las resultantes de tensión correspondientes a laminados simétricos balanceados pueden expresarse en la forma
( )
( )
( ) ( )
( )
( )
0xx 11 xx
0xs 66 xs
H 0xn 55 xn
1xx 11 xx
1xs 66 xs
N A 0 0 0 0N 0 A 0 0 0N 0 0 A 0 0M 0 0 0 D 0M 0 0 0 0 D
εγγκκ
=
(16)
Los coeficientes de rigidez tipo placa ijA , ijD y )(HijA se definen de acuerdo a la teoría de
laminación presentada por Barbero (1999). El coeficiente 16D ha sido despreciado debido a su valor relativamente bajo para la arquitectura de laminación considerada.
2.5 Ecuaciones Variacionales Gobernantes
Sustituyendo (9-13) en (14) e integrando con respecto a s, las ecuaciones de movimiento

de la teoría no-lineal se pueden obtener a partir de la aplicación del principio de Trabajos Virtuales para una lámina compuesta, de la siguiente forma:
M K PL L L 0+ + = (17)
donde
( )
( ) ( )
2L 2 2 2 2y0 z
M 0 z z y y w 02 2 2 2 20
2 2
0 0 0 s2 2
uL A u I I C A v z vt t t t t
A w y w Az v Ay w I dxt t
θθ θρ δ δθ δθ δθ φ δ
φ δ φ δφ
∂∂ ∂ ∂ ∂= + + + + −
∂ ∂ ∂ ∂ ∂∂ ∂
+ + + − + + ∂ ∂
∫ (18)
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
cos sen cos sen cos sen
cos sen cos sen cos sen
cos sen
L
K 0 0 z z y y y z y z y0
z y z y z z y
z y 0 z 0 z 0 y 0 y sv y y
L u N u N M M Q
Q v Q Q v N w Q Q w N
1 1 1Q 1 u Q 1 u Q y Q z T B2 2 2
δ θ φ θ φ θ φ θ φ θ φ θ φ
θ φ θ φ δ φ φ δ φ φ
δθ φ φ θ θ θ
δ
′ ′ ′ ′ ′ ′= + − + − + − +
′ ′ ′ ′− + + − + + + + ′ ′ ′ ′ ′′+ − + + + + − − −
+
∫
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
cos sen sen
cos sen
cos sen y sen
z z 0 y 0 0 y 0 z 0 y sv y z zz y yz
y z 0 y 0 y 0 z 0 z sv z z
y y 0 z 0 0 z 0 y 0 z
1 1M 1 u M 1 u N z Q z Q y T P P2 2
1 1 1Q 1 u Q 1 u Q z Q y T B2 2 2
1 1M 1 u M 1 u N Q y Q z2 2
θ φ φ φ θ θ θ θ
δθ φ φ θ θ θ
δθ φ φ φ θ
′ ′ ′ ′ ′− + + + + + − + + + ′ ′ ′ ′ ′′+ − + − + + − + +
′ ′ ′+ − + − + − + − −
( ) ( )( ) ( ) ( )( )( ) ( )( )
sen cos sen cos
( )sen ( )cos y cos
( )sen ( ) cos
sv z z yz y yy
y y y 0 z z 0 z z z 0 y y 0
y z z 0 y y 0 0 z 0 y
z y y 0 z z 0 z y
T P P
M u u M u u
Q v u w u N z
1Q w u v u B2
θ θ θ
δφ θ θ φ θ θ φ θ θ φ θ θ φ
θ θ φ θ θ φ θ θ φ
θ θ φ θ θ φ δθ θ
′ ′+ + ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′ ′+ + + + + + − +
′ ′ ′ ′ ′ ′+ − + − − + + −
′ ′ ′ ′ ′′+ − + + − + +
[ ]
y z
w sv 1 w
1 B2
T T B B T dx
δθ θ
δφ φ δθ δθ
′′−
′ ′ ′+ + + + −
(19)
Las expresiones de Lp son las mismas que las presentadas en Machado et al. (2005b); de la misma manera que las fuerzas tipo viga en términos de las deformaciones generalizadas han sido definidas por los autores en Machado et al. (2005b).
3 METODOLOGÍA DE SOLUCIÓN
La solución exacta de este tipo de problemas es generalmente muy difícil de obtener, por lo tanto se emplean ya sea técnicas puramente numéricas o de perturbación. Entre las técnicas puramente numéricas se utiliza el método de diferencias finitas tanto para discretizar el dominio temporal como el espacial, elementos finitos para el espacial y diferencias finitas para el temporal o elementos finitos tanto en el temporal como en el espacial. Este tipo de técnicas son computacionalmente costosas especialmente en sistemas bi y tridimensionales. Entre las técnicas de aproximación basadas en perturbación se pueden mencionar a dos de ellas, las cuales son las más utilizadas en este tipo de problemas. Una de ellas asume la dependencia del tiempo, utiliza el método de balance armónico y proporciona ecuaciones diferenciales no lineales que describen el comportamiento espacial. La segunda aproximación asume la variación espacial (tal como las formas modales lineales), utiliza la ortogonalidad de las formas modales o el procedimiento de Galerkin y proporciona ecuaciones diferenciales ordinarias no lineales acopladas que describen el comportamiento temporal. Estas últimas

ecuaciones son resueltas por medio de una técnica de perturbación denominada escalas múltiples (Nayfeh y Mook, 1979).
En este trabajo se utilizará esta última técnica de perturbación para resolver la ecuación variacional gobernante. Por lo tanto, los desplazamientos son expresados como una combinación lineal de vectores conocidos dependientes de x, fk(x)= fk1(x), fk2(x), fk3(x) y coeficientes dependiente del tiempo-t desconocidos qk(t):
( )( , ) ( )n
k kk 1
x t q t x=
= ∑u f (20)
Las funciones fk(x) son las autofunciones de las ecuaciones y condiciones de borde linealizadas, correspondientes al problema de vibración libre. Reemplazando la expresión (20) en la ecuación gobernante (17) y separando términos en δqk, se obtienen las ecuaciones diferenciales ordinarias de movimiento. Asumiendo una expansión (20) de n términos (es decir, asumiendo un grupo de n modos con longitud de onda similar), y reteniendo términos hasta tercer orden, se obtienen las ecuaciones no lineales:
( ) , , .., .n n n n n
2k k k kij i j kijm i j m k
i 1 j 1 i 1 j 1 m 1
q q c q q c q q q f k 1 2 3 nω= = = = =
+ = + + =∑∑ ∑∑∑ (21)
donde ωk es la frecuencia lineal del modo k-esimo, fk la fuerza modal, y ckij y ckijm son los
coeficientes dependientes de las autofunciones. Los términos cuadráticos y cúbicos que aparecen en cada ecuación dependerán de la simetría de la sección trasversal analizada y por consiguiente del acoplamiento no lineal entre los modos.
3.1 Ecuaciones de amplitud y fase del modelo discreto
En este caso se analiza las oscilaciones no lineales de una viga C con sección mono-simétrica simplemente apoyada y sometida a una fuerza armónica puntual, aplicada en el medio de la longitud de la viga (Figura 2). En este caso, la viga puede estar sometida a vibraciones naturales flexionales y flexo-torsionales. Además, la viga puede experimentar resonancia interna involucrando a todas las componentes de desplazamientos, debido al fenómeno de acoplamiento modal. En este ejemplo, la viga considerada presenta una relación entre las frecuencias de vibración libre: ω2/ω1 ≈ 2 y ω3/ω1 ≈ 3, donde ω1 y ω3 corresponde a dos frecuencias flexo-torsionales y ω2 es la frecuencia flexional en la dirección del eje de simetría. Este tipo de relación de frecuencia implica la aparición de resonancias internas cuadrática y cúbica y una resonancia de combinación.
Figura 2. Dibujo esquemático de modos de vibración (a) flexional y (b) flexo-torsional acoplado de una viga monosimétrica simplemente apoyada.
Utilizando una discretización de tres modos (n = 3), las ecuaciones de movimiento
discretas quedan expresadas de la siguiente manera:
L
z P(t) z
y y
z

2 3 3 2 2 2 21 1 1 1 1 1 1 2 2 2 3 3 1 4 3 5 1 2 6 1 3 7 3 1 8 3 2 19
2 2 2 2 3 2 22 2 2 2 2 9 1 10 2 11 3 2 1 3 12 1 2 3 13 2 5 2 1 14 2 3
2 33 3 3 3 3 2 1 2 15 2 3 16 1 17 3
q d q q c q q c q q c q c q c q q c q q c q q c q q c P
q d q q c q c q c q c q q c q q q c q c q q c q q
q d q q c q q c q q c q c q
ω
ω
ω
+ + = + + + + + + + +
+ + = + + + + + + +
+ + = + + + 3 2 2 2 28 1 2 18 1 3 6 3 1 14 3 2 20c q q c q q c q q c q q c P+ + + + +
(22)
donde qi es la amplitud del modo i-esimo, di son los coeficientes de amortiguamiento modales y P(t) = peiΩt es la carga, la frecuencia de excitación externa Ω se asume estar en resonancia primaria con el primer modo- q1. La idea principal del método de escalas múltiples es considerar una expansión representando la respuesta como una función de variables múltiples independientes o escalas, en lugar de una sola variable. En este caso se introducen tres escalas de tiempo diferentes
T0 = t, T1 = ε t, T2 = ε2 t (23)
donde T0 es una escala rápida, sobre la cual ocurren los movimientos con frecuencia del orden de excitación Ω. Mientras que T1 y T2 son escalas lentas, siendo T2 más lenta que T1 , con las cuales se puede realizar la modulación de amplitud y fase. Luego se asume que los desplazamientos pueden ser expresados como una expansión de la siguiente forma
( ) ( ) ( ) ( )( ) ( ) ( ), , , , , , , , , , , ,0 2 1 3 2i 0 1 2 i 0 1 2 i 0 1 2 i 0 1 2q T T T q T T T q T T T q T T Tε ε ε ε ε ε ε= + + (24)
donde ε es un pequeño parámetro adimensional. En este caso la expansión es realizada hasta tercer O(ε3), por tal motivo es que necesitan tres escalas de tiempo. Por otro lado, los coeficientes de amortiguamiento y carga son escalados de tal forma que aparezcan junto con el efecto de la no linealidad en las mismas ecuaciones de perturbación.
2i i
3
d d
p p
ε
ε
=
= (25)
Reemplazando la ecuación (24) y (25) en (22) e igualando coeficientes de igual potencia de ε, se obtiene las siguientes ecuaciones de perturbación.
Orden ε :
( ) ( )2 0 2 00 i i iD q q 0ω+ = , (i = 1,2,3) (26)
Orden ε2 :
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
2 2 2
2 1 2 1 0 0 0 0 00 1 1 1 0 1 1 1 1 2 2 2 3
2 1 2 1 0 0 0 0 0 00 2 2 2 0 1 2 9 1 10 2 2 1 3 11 3
2 1 2 1 0 0 0 0 00 3 3 3 0 1 3 2 1 2 15 2 3
D q q 2D D q c q q c q q
D q q 2D D q c q c q c q q c q
D q q 2D D q c q q c q q
ω
ω
ω
+ = − + +
+ = − + + + +
+ = − + +
(27)
Orden ε3 : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
+
3 2
2 2 2 30
2 2 2 2 0 1 2 0 0 0 1 0 0 0 0 10 1 1 1 1 0 1 0 1 1 1 1 0 2 1 3 1 1 1 2 5 1 2 1 1 2
i T0 0 1 0 1 0 0 0 0 0 17 1 3 8 2 3 2 2 3 6 1 3 4 3 2 2 3 19
20
D q q d D q 2D D q D q 2D D q c q c q q c q q c q q
c q q c q q c q q c q q c q c q q c p e
D q
ωΩ
+ = − − − − + + +
+ + + + + + +( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
+
2 3
3
2 2 2 0 1 2 0 0 0 1 0 0 02 2 2 2 0 2 0 1 2 1 2 0 2 2 9 1 1 5 1 2 13 2
0 1 1 0 0 0 0 0 0 0 1 0 110 2 2 2 1 3 12 1 2 3 14 2 3 2 1 3 11 3 3
2 2 2 20 3 3 3
q d D q 2D D q D q 2D D q 2c q q c q q c q
2c q q c q q c q q q c q q c q q 2c q q
D q q
ω
ω
+ = − − − − + + +
+ + + + +
+ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
+
3 2
2 2 2 30
0 1 2 0 0 0 1 0 0 0 0 13 0 3 0 1 3 1 3 0 2 3 16 1 2 1 2 8 1 2 2 1 2
i T0 0 1 0 1 0 0 0 0 0 16 1 3 14 2 3 15 2 3 18 1 3 17 3 15 2 3 20
d D q 2D D q D q 2D D q c q c q q c q q c q q
c q q c q q c q q c q q c q c q q c p e Ω
= − − − − + + +
+ + + + + + +
(28)

donde ,2 2
2i i j2
i ji
D D DT TT
∂ ∂= =
∂ ∂∂ (i, j = 0, 1, 2).
La solución de las ecuaciones de perturbación de primer orden (26) es
i( ) ( , ) . . , , .i 0T0i i 1 2q A T T e c c i 1 2 3ω= + = (29)
donde Ai son funciones complejas desconocidas y c.c. indica a los complejos conjugados de los términos precedentes. En este nivel de aproximación estas funciones son aún arbitrarias y luego serán determinadas eliminando los términos seculares en un nivel de aproximación mayor. Para investigar la respuesta del sistema bajo condiciones de resonancia interna y externa, se consideran las siguientes relaciones:
, , 2 21 1 2 1 2 3 1 32 3ω ε σ ω ω εσ ω ω ε σΩ = + = + = + (30)
donde σi son parámetros de sintonización, los cuales describen cuantitativamente la cercanía de la condición de resonancia. La primera relación tiene en cuenta la resonancia primaria externa, mientras que las últimas dos consideran la resonancia interna cuadrática y cúbica. Una teoría lineal sin amortiguamiento indicará oscilaciones sin límites cuando σ1 = 0 independientemente de cuan pequeña sea la excitación. En el sistema actual estas grandes oscilaciones están limitadas por el amortiguamiento y la no linealidad geométrica. Por lo tanto, para obtener una solución aproximada uniformemente válida, es necesario ordenar la excitación para que aparezca cuando aparecen el amortiguamiento y el efecto de la no linealidad. Reemplazando (29) en (27), y haciendo cero los términos seculares exp(iωkT0), se pueden resolver las ecuaciones de orden ε2 y ε3. Luego para volver al verdadero dominio temporal se utiliza el método de reconstitución (Nayfeh, 1985), donde se combina a las ecuaciones a derivadas parciales para obtener las ecuaciones diferenciales ordinarias que gobiernan las ecuaciones de modulación. Además, para analizar las ecuaciones de modulación, A1, A2 y A3 son expresadas en coordenadas cartesianas:
( ) ii , , .kk k k
1A p q e k 1 2 32
ν= − = (31)
donde , , .1 2 1 2 2 1 1 2 3 2 1 2 3T 2T T 3T Tν σ ν σ σ ν σ σ= = − = −
Aplicando el método de reconstitución y teniendo en cuenta (31) se obtienen las siguientes expresiones separando en partes reales e imaginarias.
22 3 2 2 2 2 3 21 1 1 2 1 2 1 1 2 2 1 1 1 1 2 1
1 1 1 2 2 2 21 11 1 1 1
2 2 233 2 1 2 1 3 1 5 3 1 2 3 2 4 2 3 2 3 1 21 1 1 1 2
1 1 1 1 1 1 1 12
2 1 3 2 2 3 4 2
1 1
c p q c p qd p c p q c p q b p q c p qp q
2 8 48 8 8 8
b p q b p p q b p q c p q b p p q b q qb q c p q8 4 8 8 4 4 4 8
b p q c p q b p8 4
σ σσ σσ
ω ωω ω ω ω
ω ω ω ω ω ω ω ω
ω ω
′ = − − − + + − − +
− + − − − + − −
− − +2 2 2 2
3 2 1 3 4 2 3 5 1 3
1 1 1 1
q b q q b q q b q q8 8 8 8ω ω ω ω
+ − −

9 1 1 2 2 3 1 2 2 1 3 2 9 1 1 2 3 1 9 2 3 12 22 2 1 2 2 2
2 2 22 2 22 2 2 2 3
6 1 2 7 2 2 9 1 3 2 8 3 2 6 1 2 7 2 2 1 3 9 1 2 3
2 2 2 2 2 2 2 22
9 1 2 3 8 2 3
2 2
c p q c p q c p q c p q c p q b p p qd pp 2q
2 2 4 84 8 8
b p q b p q b p p q b p q b q q b q c p q b p p q8 8 8 8 8 8 4 8
b q q q b q q8 8
σ σ σσ
ω ω ωω ω ω
ω ω ω ω ω ω ω ω
ω ω
′ = − − − + + − + −
− − + − − − − −
− −
2 23 3 10 1 12 2 1 2 2 1 2 2 2 2 1 11 2 1
3 3 1 3 3 2 23 3 33 3
3 2 2 2210 1 12 1 3 13 2 3 14 3 32 1 2 11 1 2 2 11 1 2
3 3 3 3 3 3 3
2 2 312 1 3 13 2 3 14 3
3 3 3
d p 3b p qc p q c p q c p q b p qp 3q q
2 8 4 88 8
b q b p q b p q b p qc p q b p p q b q q8 4 4 8 8 8 8
b q q b q q b q8 8 8
σ σσ σ
ω ω ωω ω
ω ω ω ω ω ω ω
ω ω ω
′ = − − + + + − − +
+ − − − − − −
− − −
32 2 3 2 2 2 3 2 191 1 1 1 2 2 1 1 2 2 1 1 1 1 2
1 1 1 2 2 2 21 1 11 1 1 1
2 2 2 2 2 223 1 2 2 1 3 2 2 3 4 2 3 5 1 3 2 3 1 3 1 21 1 1 1 1 2
1 1 1 1 1 1 1 1 12
4 3 2
c p p c q q c pd p c p p c q q b p c p pq p
2 8 48 8 8 8
b p p b p p c p p b p p b p p b p q b p qb p q c q q8 8 4 8 8 8 8 4 8
b p q8
σ σσ σσ
ω ω ωω ω ω ω
ω ω ω ω ω ω ω ω ω
ω
′ = − − − + − + + + +
+ + + + − + − + +
−2
2 1 3 2 2 3 4 2 2 3 5 1 3
1 1 1 1 1
b q q c q q b p q q b p q4 4 4 8ω ω ω ω
+ + + +
(32)
2 2 2 29 1 2 2 1 3 2 9 1 2 2 1 3 2 9 1 6 1 22 2
2 2 1 2 2 2 22 22 2 2 2
3 2 2 2 27 2 2 1 3 9 1 2 3 8 2 3 9 1 6 2 1 9 3 1 2 7 2 2
2 2 2 2 2 2 2 2
2 1 3 9 2 1 3 9 1 2
2 2
c p c p p c q c q q c p b p pd qq 2 p
2 4 88 8 8 8
b p c p p b p p p b p p c q b p q b p q q b p q8 4 8 8 4 8 8 8
c q q b p q q b p q4 8
σ σ σ σσ
ω ωω ω ω ω
ω ω ω ω ω ω ω ω
ω ω
′ = − + + + − + + +
+ + + + − + + +
+ − +2
3 8 2 3
2 2
q b p q8 8ω ω
+
3 23 3 10 12 1 2 2 2 1 2 2 2 1 2 11 1 2
3 3 1 3 3 2 23 3 33 3
2 2 3 2 212 1 3 13 2 3 14 3 10 1 1 12 1 3 2 1 2 11 2 1 2
3 3 3 3 3 3 3
2 2213 2 3 14 3 311 1 2
3 3 3
d q b pc p p c q q c p p b p pq 3 p p
2 8 4 88 8
b p p b p p b p 3b p q b q p c q q b p q q8 8 8 8 8 4 4
b q p b p qb p q8 8 8
σ σσ σ
ω ω ωω ω
ω ω ω ω ω ω ω
ω ω ω
′ = − + − − + + + +
+ + + − + − +
− + +
Luego las amplitudes ai son calculadas de la siguiente manera
, , .2 2i i ia p q i 1 2 3= + = (33)
4 RESULTADOS NUMÉRICOS
En esta sección se estudia el comportamiento dinámico resonante no lineal de una viga monosimétrica C de pared delgada. Las propiedades geométricas son L = 6 m, h = 0.6 m, b = 0.6 m, e = 0.03 m. Las propiedades del material analizado es E = 2.1 1011 Pa, µ = 0.3 y ρ = 7830 Kg/m3. De la solución del problema lineal de vibración libre se obtiene los tres primeros autovalores:
ω1 = 312 rad/s, ω2 = 661 rad/s, ω3 = 1174 rad/s
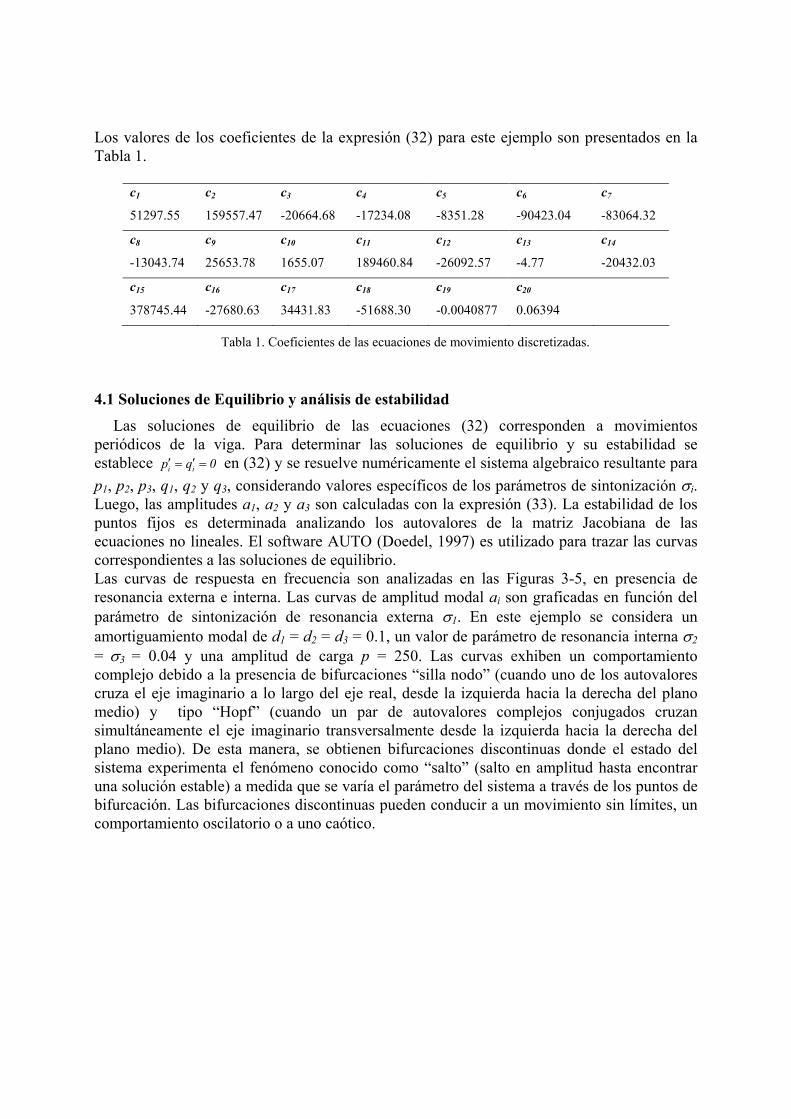
Los valores de los coeficientes de la expresión (32) para este ejemplo son presentados en la Tabla 1.
c1 c2 c3 c4 c5 c6 c7
51297.55 159557.47 -20664.68 -17234.08 -8351.28 -90423.04 -83064.32
c8 c9 c10 c11 c12 c13 c14
-13043.74 25653.78 1655.07 189460.84 -26092.57 -4.77 -20432.03
c15 c16 c17 c18 c19 c20
378745.44 -27680.63 34431.83 -51688.30 -0.0040877 0.06394
Tabla 1. Coeficientes de las ecuaciones de movimiento discretizadas.
4.1 Soluciones de Equilibrio y análisis de estabilidad
Las soluciones de equilibrio de las ecuaciones (32) corresponden a movimientos periódicos de la viga. Para determinar las soluciones de equilibrio y su estabilidad se establece i ip q 0′ ′= = en (32) y se resuelve numéricamente el sistema algebraico resultante para p1, p2, p3, q1, q2 y q3, considerando valores específicos de los parámetros de sintonización σi. Luego, las amplitudes a1, a2 y a3 son calculadas con la expresión (33). La estabilidad de los puntos fijos es determinada analizando los autovalores de la matriz Jacobiana de las ecuaciones no lineales. El software AUTO (Doedel, 1997) es utilizado para trazar las curvas correspondientes a las soluciones de equilibrio. Las curvas de respuesta en frecuencia son analizadas en las Figuras 3-5, en presencia de resonancia externa e interna. Las curvas de amplitud modal ai son graficadas en función del parámetro de sintonización de resonancia externa σ1. En este ejemplo se considera un amortiguamiento modal de d1 = d2 = d3 = 0.1, un valor de parámetro de resonancia interna σ2
= σ3 = 0.04 y una amplitud de carga p = 250. Las curvas exhiben un comportamiento complejo debido a la presencia de bifurcaciones “silla nodo” (cuando uno de los autovalores cruza el eje imaginario a lo largo del eje real, desde la izquierda hacia la derecha del plano medio) y tipo “Hopf” (cuando un par de autovalores complejos conjugados cruzan simultáneamente el eje imaginario transversalmente desde la izquierda hacia la derecha del plano medio). De esta manera, se obtienen bifurcaciones discontinuas donde el estado del sistema experimenta el fenómeno conocido como “salto” (salto en amplitud hasta encontrar una solución estable) a medida que se varía el parámetro del sistema a través de los puntos de bifurcación. Las bifurcaciones discontinuas pueden conducir a un movimiento sin límites, un comportamiento oscilatorio o a uno caótico.

−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 10
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
1
2
1 3 6
2 3
5 4
4
8
7
a 1
σ 1
SN
SN
SN
SN
SN
SN
SN
SN
H
H
H
H
SN 8
Figura 3. Curva de respuesta en frecuencia del primer modo, di = 0.1. Resonancia interna σ2 =σ3 = 0.04. Líneas continuas (puntos) representan soluciones de equilibrio estables (inestables) y líneas continuas finas
representan focos inestables.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 10
0.002
0.004
0.006
0.008
0.01
0.012
0.014
SN
1
2
2
3 6
1
3
5 4
4
8
7
a 2
σ 1
SN
SN
SN
SN
SN
SN
SN
H
H H
H
Figura 4. Curva de respuesta en frecuencia del segundo modo, di = 0.1. Resonancia interna σ2 =σ3 = 0.04. Líneas continuas (puntos) representan soluciones de equilibrio estables (inestables) y líneas continuas finas
representan focos inestables.
Para valores pequeños de σ1 la solución es estable hasta llegar a un valor σ1 = -0.3803 (SN1), donde la respuesta pierde estabilidad a través de una bifurcación silla nodo. Luego la amplitud de los tres modos crece hasta alcanzar otra curva estable (fenómeno de salto creciente en amplitud), la cual esta limitada por bifurcación silla nodo a la izquierda (SN2, σ1

= -0.7671) y por una bifurcación de Hopf a la derecha de la misma (H1, σ1 = -0.1501). A partir de este punto, la respuesta corresponde a una solución inestable pasando por dos sillas nodos (SN3, σ1 = -0.1137 y SN4, σ1 = -0.1744) hasta llegar a una bifurcación inversa de Hopf (H2, σ1 = -0.1201) donde la solución se vuelve estable. Luego cuando se alcanza el estado de resonancia externa perfecta σ1 ≈ 0, se observa claramente que la solución es aproximadamente simétrica para valores de σ1 positivos. A medida que se avanza hacia valores positivos del parámetro σ1, la solución pierde estabilidad a través de una bifurcación de Hopf (H3, σ1 = 0.1384) y luego la vuelve recuperar por medio de una bifurcación inversa de Hopf (H4, σ1 = 0.1658), pasando por dos bifurcaciones silla nodo (SN5, σ1 =0.1895 y SN6, σ1 = 0.1297). La solución estable vuelve a crecer en amplitud hasta llegar a una bifurcación silla nodo (SN7, σ1 = 0.8176) y luego decrece abruptamente hasta volver a recuperar estabilidad en otra rama estables (fenómeno de salto decreciente en amplitud). Esta última rama estable presenta una bifurcación silla nodo (SN8, σ1 =0.3869) para valores pequeños del parámetro de sintonización.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7
8x 10
−3
SN
1
2
2 3
6
1
3
5 4
4
8
7
a 3
σ 1
SN SN
SN
SN
SN
SN
SN
H
H
H
H
Figura 5. Curva de respuesta en frecuencia del tercer modo, di = 0.1. Resonancia interna σ2 =σ3 = 0.04.
Líneas continuas (puntos) representan soluciones de equilibrio estables (inestables) y líneas continuas finas representan focos inestables.
De la comparación entre las tres Figuras 3, 4 y 5, se observa que la mayor amplitud corresponde al primer modo que está directamente excitado por la carga externa. La solución posee tres picos de amplitud, en el primer modo la amplitud mayor se presenta en el tercer pico, que esta curvado hacia la derecha (donde se encuentra la bifurcación SN7). En el segundo modo la amplitud máxima se observa en el primer pico que esta curvado hacia la izquierda (SN2). Por último, la amplitud máxima del tercer modo corresponde al segundo pico, que se ubica en σ1 ≈ 0. Este crecimiento en amplitud presente en la respuesta del tercer modo, corresponde a una disminución en la curva de equilibrio del segundo modo.
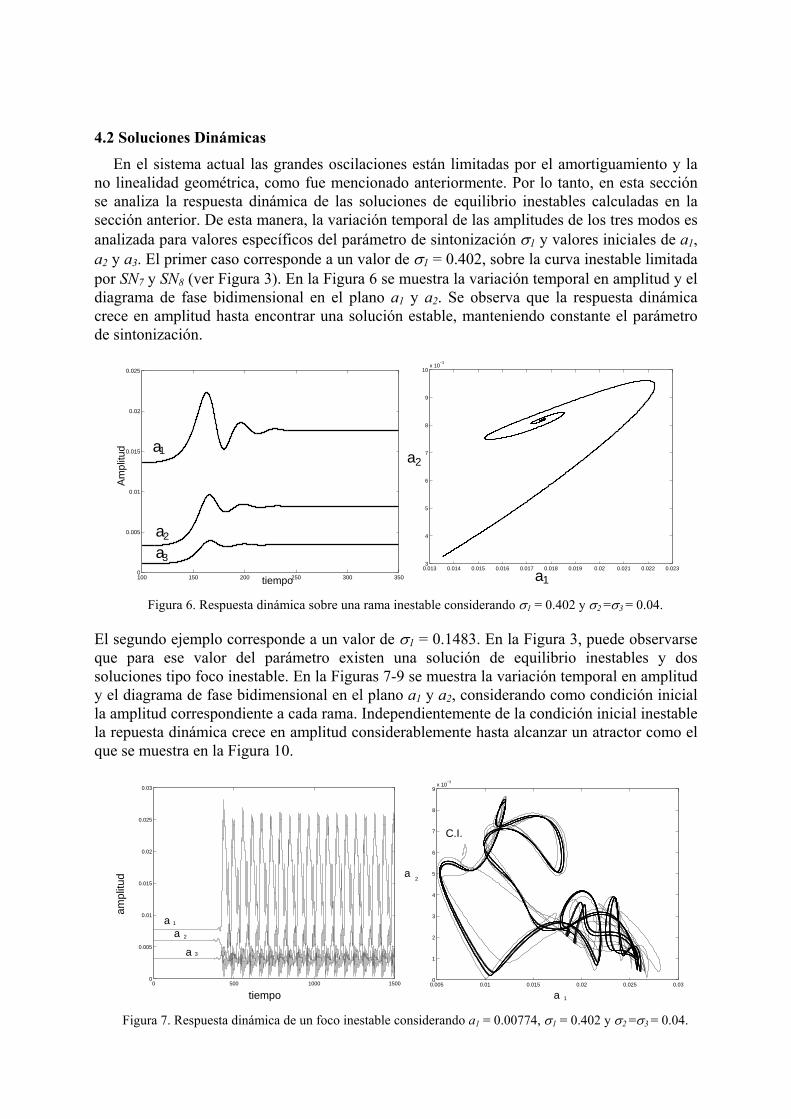
4.2 Soluciones Dinámicas
En el sistema actual las grandes oscilaciones están limitadas por el amortiguamiento y la no linealidad geométrica, como fue mencionado anteriormente. Por lo tanto, en esta sección se analiza la respuesta dinámica de las soluciones de equilibrio inestables calculadas en la sección anterior. De esta manera, la variación temporal de las amplitudes de los tres modos es analizada para valores específicos del parámetro de sintonización σ1 y valores iniciales de a1, a2 y a3. El primer caso corresponde a un valor de σ1 = 0.402, sobre la curva inestable limitada por SN7 y SN8 (ver Figura 3). En la Figura 6 se muestra la variación temporal en amplitud y el diagrama de fase bidimensional en el plano a1 y a2. Se observa que la respuesta dinámica crece en amplitud hasta encontrar una solución estable, manteniendo constante el parámetro de sintonización.
100 150 200 250 300 3500
0.005
0.01
0.015
0.02
0.025
a
a a
1
2
3
tiempo
Am
plitu
d
0.013 0.014 0.015 0.016 0.017 0.018 0.019 0.02 0.021 0.022 0.0233
4
5
6
7
8
9
10x 10
−3
a
a 1
2
Figura 6. Respuesta dinámica sobre una rama inestable considerando σ1 = 0.402 y σ2 =σ3 = 0.04.
El segundo ejemplo corresponde a un valor de σ1 = 0.1483. En la Figura 3, puede observarse que para ese valor del parámetro existen una solución de equilibrio inestables y dos soluciones tipo foco inestable. En la Figuras 7-9 se muestra la variación temporal en amplitud y el diagrama de fase bidimensional en el plano a1 y a2, considerando como condición inicial la amplitud correspondiente a cada rama. Independientemente de la condición inicial inestable la repuesta dinámica crece en amplitud considerablemente hasta alcanzar un atractor como el que se muestra en la Figura 10.
0 500 1000 15000
0.005
0.01
0.015
0.02
0.025
0.03
a
a a 1
2
3
tiempo
ampl
itud
0.005 0.01 0.015 0.02 0.025 0.030
1
2
3
4
5
6
7
8
9x 10
−3
a
a
1
2
C.I.
Figura 7. Respuesta dinámica de un foco inestable considerando a1 = 0.00774, σ1 = 0.402 y σ2 =σ3 = 0.04.

0 100 200 300 400 500 600 700 800 900 10000
0.005
0.01
0.015
0.02
0.025
0.03
a
a
1
2
tiempo
a 3
0.005 0.01 0.015 0.02 0.025 0.030
1
2
3
4
5
6
7
8
9x 10
−3
a
a
1
2
C.I.
Figura 8. Respuesta dinámica sobre una rama inestable considerando a1 = 0.01, σ1 = 0.402 y σ2 =σ3 = 0.04.
0 100 200 300 400 500 600 700 800 900 10000
0.005
0.01
0.015
0.02
0.025
0.03
a
a
1
2
tiempo
a 3
0 0.005 0.01 0.015 0.02 0.025 0.030
1
2
3
4
5
6
7
8
9x 10
−3
a
a 1
2
C.I.
Figura 9. Respuesta dinámica de un foco inestable considerando a1 = 0.016, σ1 = 0.402 y σ2 =σ3 = 0.04.
Por otro lado, de acuerdo al teorema de bifurcación de Hopf, pequeños ciclos límites nacen como resultado de una bifurcación de Hopf. La bifurcación de Hopf es supercrítica cuando los ciclos límites son estables y subcrítica cuando los ciclos límites son inestables. Las soluciones de ciclo límite corresponden a respuestas aperiódicas de la viga. En las soluciones de equilibrio de la Figuras 3-5, existen cuatro bifurcaciones de Hopf. Donde H1 (σ1 = -0.1501) y H4 (σ1 = 0.1658) representan bifurcaciones de Hopf subcríticas y H2 (σ1 = -0.1201) y H3 (σ1 = 0.1384) bifurcaciones de Hopf supercríticas. En las Figuras 11-13, se muestran las soluciones dinámicas que emergen de la bifurcación de Hopf en H3. A medida que aumenta el parámetro de sintonización σ1 el ciclo límite que nace de H3 crece, se deforma y sufre repetidamente bifurcaciones de doble período hasta terminar en un atractor caótico, como se observa en la Figura 14.

0.005 0.01 0.015 0.02 0.025 0.030
1
2
3
4
5
6
7
8
9x 10
−3
a
a 1
2
Figura 10. Diagrama de fase bidimensional de un atractor en el plano a1 y a2 , σ1 = 0.402.
0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.4
3.5
3.6
x 10−3
a
a
3
1
0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.35
3.4
3.45
3.5
3.55
3.6
3.65
3.7x 10
−3
a
a
3
1 Figura 11. Ciclos Límites de simple p-1 y doble período p-2 (σ1 = 0.1390 y σ1 = 0.1402).
0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.35
3.4
3.45
3.5
3.55
3.6
3.65
3.7x 10
−3
a
a
3
1
0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.35
3.4
3.45
3.5
3.55
3.6
3.65
3.7x 10
−3
a
a
3
1 Figura 12. Ciclos Límites de período p-4 y p-8 (σ1 = 0.14032 y σ1 = 0.14036).

0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.35
3.4
3.45
3.5
3.55
3.6
3.65
3.7x 10
−3
a
a
3
1
0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.35
3.4
3.45
3.5
3.55
3.6
3.65
3.7x 10
−3
a
a
3
1 Figura 13. Ciclos Límites de período p-16 y p-32 (σ1 = 0.140370 y σ1 = 0.140375).
0.0155 0.016 0.0165 0.017 0.0175 0.018 0.0185 0.0193.3
3.4
3.5
3.6
3.7x 10
−3
a
a
3
1 Figura 14. Atractor Caótico en dos dimensiones, σ1 = 0.14038.
Cuando se aumenta el valor de parámetro de sintonización σ1, el tamaño del atractor caótico se mantiene prácticamente constante para valores que se encuentran entre σ1 = 0.14038 y 0.1407. A partir de este último valor el atractor caótico experimenta una bifurcación explosiva como se observa en la Figura 15. Se observa un considerable aumento de la amplitud del atractor con respecto a su forma anterior, este último atractor es el mismo que se obtuvo en las Figuras 7-10.

0 200 400 600 800 1000 1200 1400 1600 1800 20000
0.005
0.01
0.015
0.02
0.025
0.03
a
tiempo
1
0 0.005 0.01 0.015 0.02 0.025 0.031.5
2
2.5
3
3.5
4
4.5
5
5.5x 10
−3
a 3
a 1 Figura 15. Bifurcación explosiva del atractor Caótico en σ1 = 0.1407.
5 CONCLUSIONES
En este trabajo se investigó la interacción modal de una viga simplemente apoyada de sección monosimétrica y sometida a una excitación externa en resonancia con el primer modo flexo-torsional de la viga. La relación que existe entre la frecuencia del segundo y tercer modo con la del primer modo de 2:1 y 3:1, respectivamente, permitió activar el fenómeno de resonancia interna. Con el método de escalas múltiples se obtuvieron seis ecuaciones diferenciales ordinarias de primer orden que describen la modulación de las amplitudes y fases de los modos interactuando entre sí. La solución numérica de estas últimas ecuaciones permitió ilustrar el comportamiento de la viga a través de curvas de respuesta en frecuencia y amplitud versus carga. Debido a la transferencia de energía y a la presencia del acoplamiento modal, la reacción de la estructura a una simple excitación armónica resultó en una respuesta muy compleja consistente en muchos modos y exhibiendo movimientos indeseables, tal como oscilaciones caóticas. Además, el comportamiento de la estructura presentó una respuesta consistente en movimientos periódicos y aperiódicos en algunos casos.
A futuro se puede considerar la influencia de los términos de inercia no lineales sobre el comportamiento dinámico de la viga. Tal metodología de análisis puede ser complementada con resultados de simulación numérica de las ecuaciones (21). Este último enfoque podría ser usado de manera alternativa. Sin embargo, para un análisis exhaustivo requeriría la solución de una gran cantidad de situaciones de forma de cubrir todos los posibles estados de resonancia, resultando de esta manera en una metodología ineficiente.
6 AGRADECIMIENTOS
El presente trabajo fue realizado gracias a Secretaría de Ciencia y Tecnología, Universidad Tecnológica Nacional, Universidad Nacional del Sur y al CONICET.
REFERENCIAS
Barbero, E.J., Introduction to Composite Material Design. Taylor and Francis Inc., 1999. Benedettini, F., Di Egidio, A., Theoretical and experimental finite forced dynamics of a
cantilever beam: dynamic instability and modal coupling, Proceedings of DECT99, September 14–17, Las Vegas, Nevada, 1999.
Chen, S.H., Cheung, Y.K., y Lau, S.L., On the internal resonance of multi-degree-of-freedom systems with cubic nonlinearity. Journal of Sound and Vibration, 128:13–24, 1989.

Crespo da Silva, M.R.M., y Glynn, C.C., Nonlinear flexural-flexural-torsional dynamics of inextensional beams.II: forced motion. Journal of Structural Mechanics, 6(1):437–448, 1978.
Crespo da Silva, M.R.M., Zaretzky, C.L., Nonlinear flexural–flexural–torsional interaction in beams including the effect of torsional dynamics. I: primary resonance. Nonlinear Dynamics, 5:3–23, 1994a.
Crespo da Silva, M.R.M., Zaretzky, C.L., Nonlinear Flexural–flexural–torsional interaction in beams including the effect of torsional dynamics. II: combination resonance. Nonlinear Dynamics, 5:24–42, 1994b.
Di Egidio, A., Luongo, A., Vestroni, F., A non-linear model for the dynamics of open cross-section thin-walled beams-Part I: formulation. International Journal of Non-linear Mechanics, 38:1067–1081, 2003a.
Di Egidio, A., Luongo, A., Vestroni, F., A non-linear model for the dynamics of open cross-section thin-walled beams-Part II: forced motion, International Journal of Non-linear Mechanics, 38:1083–1094, 2003b.
Doedel, E.J., AUTO97 Continuation and bifurcation software for ordinary differential equations. Available by anonymous ftp from FTP.CS.CONCORDIA.CA, directory PUB/DOEDEL/AUTO, 1997.
Lau, S.L.,Cheung, Y.K., y Chen, S., An alternative perturbation procedure of multiple scales for nonlinear dynamics systems. Journal of Applied Mechanics, 56:667–675, 1989.
Luongo, A., Rega, G., Vestroni, F., Non resonant non-planar free motions of inextensional non-compact beams. Journal of Sound and Vibration, 134(1):73–86, 1989.
Machado, S.P., Cortínez, V.H., Vibración Libre de Vigas Compuestas de Pared Delgada sometidas a Tensiones y Deformaciones Iniciales. Mecánica Computacional (Asociación Argentina de Mecánica Computacional), Vol.24, 879-898, 2005a.
Machado, S.P., Cortínez, V.H., Lateral buckling of thin-walled composite bisymmetric beams with prebuckling and shear deformation. Engineering Structures, 27:1185-1196, 2005b.
Nayfeh, A.H., Mook, D.T., y Sridhar, S., Nonlinear analysis of the forced response of structural elements. Journal of the Acoustical Society of America, 55:281–291, 1974.
Nayfeh, A.H., y Mook, D.T., Nonlinear Oscillations. Wiley, New York, 1979. Nayfeh, A.H., Topical course on nonlinear dynamics, in: Perturbation Methods in Nonlinear
Dynamics, Societua Italiana di Fisica, Santa Margherita di Pula, Sardinia, 1985. Nayfeh, A.H., Mook, D.T., y Nayfeh, J.F., Some aspects of modal interactions in the response
of beams. AIAA Paper No. 87-0777 presented at the AIAA 28th Structures, Structural Dynamics and Material Conference, Monterey, CA, April 6–8, 1987.
Nayfeh, A.H., y Balachandran, B., Modal interactions in dynamical and structural systems. Applied Mechanics Reviews, 42:175–201, 1989.
Nayfeh, A.H., y Balachandran. B., Nonlinear Interactions. Wiley, New York, 1996. Pernjin, F., Nayfeh, A.H., Non-linear non-planar oscillations of a cantilever beam under
lateral base excitations. Int. J. Non-Linear Mech., 25 (5):455–474, 1990. Sridhar, S., Nayfeh, A.H., y Mook D.T., Nonlinear resonances in a class of multi-degree-of-
freedom systems. Journal of the Acoustical Society of America, 58:113–123, 1975.