Din´amica de s´olidosbigmac.mecaest.etsii.upm.es/~ignacio/resources/MSD/Apuntes/MSDca… · para...
8
Cap´ ıtulo 11 Din´ amicades´olidos Todos los modelos estudiados hasta ahora supon´ ıan que los s´ olidos de- formables se encuentran, en todo instante, en equilibrio cuasi-est´ atico. Esto quiere decir que, aunque ´ estos se deforman en cada instante debido a las solicitaciones que act´ uan sobre ellos, las fuerzas inerciales son despreciables frente a las propias de la deformaci´ on, por lo que no se consideran (de otra forma, que la energ´ ıa cin´ etica es mucho menor que la energ´ ıa potencial). En multitud de problemas pr´ acticos estos no es as´ ı y las fuerzas debidas a la inercia del continuo ha de tenerse en cuenta. Esto ocurre siempre que las fuerzas se aplican de forma r´ apida, como en las estructuras sometidas a terremotos, en los s´ olidos sometidos a impacto, o en los que se mueven con altas aceleraciones. En todas estas ocasiones las fuerzas inerciales deben de incorporarse a las ecuaciones del modelo, cambiando la naturaleza del problema de contorno y las t´ ecnicas necesarias para su resoluci´ on. 11.1. Ecuaciones de la din´ amicades´olidos Las ecuaciones que gobiernan la din´ amica de s´ olidos deformables son la extensi´ on al continuo de las leyes de Newton para la mec´ anica de part´ ıculas. Si, como en el cap´ ıtulo 2, se impone el equilibrio de cantidad de movimiento en una regi´ on R ⇢ ⌦ cualquiera se obtiene Z R ¯ f dV + Z @R\Γ t dA + Z @R[Γ ¯ t dA = d dt Z R ⇢ a dV, (11.1) siendo ⇢ la densidad del cuerpo y a =¨ u, la aceleraci´ on. Empleando el prin- cipio de Cauchy, se puede demostrar la generalizaci´ on de la ecuaci´ on (2.32) para problemas din´ amicos que es div σ + ¯ f = ⇢ a . (11.2) 219
Transcript of Din´amica de s´olidosbigmac.mecaest.etsii.upm.es/~ignacio/resources/MSD/Apuntes/MSDca… · para...

Capıtulo 11
Dinamica de solidos
Todos los modelos estudiados hasta ahora suponıan que los solidos de-formables se encuentran, en todo instante, en equilibrio cuasi-estatico. Estoquiere decir que, aunque estos se deforman en cada instante debido a lassolicitaciones que actuan sobre ellos, las fuerzas inerciales son despreciablesfrente a las propias de la deformacion, por lo que no se consideran (de otraforma, que la energıa cinetica es mucho menor que la energıa potencial).
En multitud de problemas practicos estos no es ası y las fuerzas debidasa la inercia del continuo ha de tenerse en cuenta. Esto ocurre siempre quelas fuerzas se aplican de forma rapida, como en las estructuras sometidasa terremotos, en los solidos sometidos a impacto, o en los que se muevencon altas aceleraciones. En todas estas ocasiones las fuerzas inerciales debende incorporarse a las ecuaciones del modelo, cambiando la naturaleza delproblema de contorno y las tecnicas necesarias para su resolucion.
11.1. Ecuaciones de la dinamica de solidos
Las ecuaciones que gobiernan la dinamica de solidos deformables son laextension al continuo de las leyes de Newton para la mecanica de partıculas.Si, como en el capıtulo 2, se impone el equilibrio de cantidad de movimientoen una region R ⇢ ⌦ cualquiera se obtiene
Z
Rf dV +
Z
@R\�t dA+
Z
@R[�t dA =
d
dt
Z
R⇢a dV , (11.1)
siendo ⇢ la densidad del cuerpo y a = u, la aceleracion. Empleando el prin-cipio de Cauchy, se puede demostrar la generalizacion de la ecuacion (2.32)para problemas dinamicos que es
div� + f = ⇢a . (11.2)
219

220 Mecanica de solidos, I. Romero
El planteamiento completo de un problema dinamico consiste en encontrarel campo de desplazamiento u = u(x, t) que verifica
div� + f = ⇢ u en !
� = �(")
" = gradsu
�n = t en �t
u(x, 0) = uo(x)
u(x, 0) = vo(x)
(11.3)
Los campos u0
y v
0
son, respectivamente, el desplazamiento y la velocidadinicial.
Como en el caso de los problemas estacionarios, las ecuaciones del equi-librio dinamico se pueden escribir tambien en forma debil dando lugar a unaexpresion dinamica del principio de los trabajos virtuales. Este indica queel campo de desplazamientos en equilibrio dinamico es el que verifica
Z
⌦
� · "[w] dV +
Z
⌦
⇢a ·w dV =
Z
⌦
f ·w dV +
Z
�t
t ·w dS (11.4)
para cualquier variacion admisible de los desplazamientos w. Esta ecuaciones la base del calculo dinamico de estructuras.
11.2. Energıa cinetica
La energıa cinetica es la parte de la energıa que se almacena en un cuerpodebido a que sus puntos tienen una cantidad de movimiento. Su definicionderiva directamente de la definicion de mecanica clasica y por tanto
K =1
2
Z
⌦
⇢ |u|2 d⌦ . (11.5)
El siguiente resultado demuestra que la potencia que se aplica a un cuer-po deformable desde el exterior se transforma en energıa cinetica y el unapotencia “interna” que es la que realizan las tensiones sobre la tasa de lasdeformaciones.
Teorema 11.2.1. (Teorema de las fuerzas vivas) En un cuerpo deformablesometido a fuerzas externas (f , t), la potencia externa se transforma en“potencia interna” y en cambiar la energıa cinetica, es decir,
Z
⌦
f · u dV +
Z
�t
t · u dA =
Z
⌦
� · "[u] dV +dK
dt. (11.6)
Demostracion. La demostracion del teorema de las fuerzas vivas es inme-diata a partir de la ecuacion (11.4), si mas que escoger w = u.

Capıtulo 11. Dinamica de solidos 221
k
Figura 11.1: En una onda plana, el campo de desplazamientos tiene valorconstante en planos ortogonales al vector de onda k.
11.3. Ondas planas
Las soluciones mas sencillas de la ecuacion dinamica de los cuerpos de-formables son las ondas, desplazamientos que se repiten de forma periodica.Estas ondas se clasifican segun la relacion entre su direccion de propagaciony de desplazamiento. Por ejemplo, una onda cuyo frente se mueve de formaradial desde un punto de origen se llama una onda esferica.
En el caso de un medio elastico, infinito y sin ninguna fuerza volumetricaexisten soluciones que son ondas planas, es decir, desplazamientos de laforma
u(x, t) = a sin(k · x� ct) (11.7)
El vector a es el vector de desplazamiento y se conoce a veces con el nombrede vector de polarizacion , el vector unitario k es el vector de onda y c seconoce como la velocidad de propagacion . Estas soluciones correspondena campos de desplazamiento que tienen la direccion a y que son constantesen todos los planos perpendiculares a k, repitiendose de forma periodica alo largo de k (vease la figura 11.1).
Cuando el medio es isotropo e infinito, solo hay dos tipos de ondas planasque pueden ser solucion del problema completo, a saber:
a) Si a es paralelo a k, entonces c =p
(�+ 2µ)/⇢ y se llaman ondasprimarias u ondas de tipo p. Tambien se llaman ondas longitudinalesaunque esta ultima denominacion puede llevar a equıvoco.
b) Si a es perpendicular a k, entonces c =p
µ/⇢ y la solucion se llamaondas secundarias u ondas de tipo s. Estas tambien se llaman ondas

222 Mecanica de solidos, I. Romero
de cortante, pero como anteriormente, esta acepcion puede dar lugara malentendidos.
Para demostrar este resultado se deriva, en primer lugar, dos veces res-pecto al tiempo la expresion (11.7), resultando:
u(x, t) = �c2 sin(k · x� ct)a . (11.8)
Para hallar la tension obtenemos en primer lugar el gradiente de la defor-macion
gradu(x, t) = � cos(k · x� ct)a⌦ k , (11.9)
y su simetrizacion
"(x, t) = � cos(k · x� ct)/2(a⌦ k + k ⌦ a) . (11.10)
A partir de este valor y las ecuaciones de Lame se sigue que la tension es
�(x, t) = � cos(k · x� ct) (�(a · k)I + µ(a⌦ k + k ⌦ a)) , (11.11)
cuya divergencia es
div�(x, t) = � sin(k · x� ct) [(µ+ �)(a · k)k + µa] . (11.12)
Sustituyendo (11.8) y en la ecuacion del equilibrio (11.2) se ha de verificar:
⇢c2a = (a · k)(µ+ �)k + µa . (11.13)
Esto solo puede ocurrir en dos casos. En primer lugar, si los vectores a y k
son paralelos, entonces esta relacion se satisface y ademas
c = cP =
s
�+ 2µ
⇢. (11.14)
En segundo lugar, es posible que las direcciones de polarizacion y propaga-cion sean ortogonales y entonces tambien se verifica la relacion (11.13) con
c = cS =
r
µ
⇢. (11.15)
En general, en otros medios, la relacion entre k y c no es tan sencilla.A menudo se puede encontrar una relacion de dispersion c = c(k) queademas es caracterıstica del medio.

Capıtulo 11. Dinamica de solidos 223
11.4. Modelos discretos
Las ecuaciones de la dinamica de solidos no satisfacen ningun principiode mınimos por lo que no se pueden aproximar usando el metodo de Ritzdescrito en la seccion 6.7. Sin embargo existe un metodo alternativo, muyrelacionado con el de Ritz, que sı puede aplicarse para problemas generalescomo el de la dinamica de solidos.
El metodo de Galerkin se basa en una aproximacion de la soluciony las funciones de peso de cualquier forma debil como la del principio delos trabajos virtuales (6.6) o la ecuacion (11.4) de la dinamica de los soli-dos deformables. Igual que en el metodo de Ritz la clave reside en que laaproximacion mencionada es sobre un espacio de funciones con dimensionfinita.
En el caso del principio de los trabajos virtuales, donde la ecuacionvariacional no depende del tiempo, la aproximacion del metodo de Galerkines exactamente la misma que la del metodo de Ritz (cf.6.37). Mas aun, losdos metodos dan lugar exactamente a las mismas aproximaciones, salvo enalgun caso como la plasticidad no asociativa en la que las tensiones o lasecuaciones cineticas no dependen de un potencial.
En el caso de la ecuacion (11.4) los campos de desplazamiento y lasfunciones de peso se aproximan como:
u(x, t) ⇡ u
h(x, t) =X
i
�i(x)ui(t) , w
h(x) =X
i
�i(x)wi . (11.16)
Estas interpolaciones se diferencian en que los desplazamientos dependen deparametros ui que son funciones del tiempo, mientras que las funciones depeso se aproximan por funciones que no dependen del tiempo.
Cuando en la ecuacion (11.4) se reemplazan tanto los desplazamientos ysus derivadas como las funciones de peso por sus respectivas aproximaciones,se obtiene una ecuacion diferencial ordinaria de la forma
X
i
M jiui +X
i
Kjiui = F j , (11.17)
siendo K la matriz de rigidez, definida en la seccion 6.7, y M la matriz demasa , cuyas componentes son
M ji =
Z
⌦
⇢ �j(x)�i(x) dV I . (11.18)
La ecuacion (11.17) es la base del calculo dinamico de solidos y estructuras.
11.5. Ondas en solidos unidimensionales
El problema de propagacion de ondas mas sencillo que se puede resolveranalıticamente es el de la un medio elastico unidimensional. A pesar de las

224 Mecanica de solidos, I. Romero
simplificaciones necesarias para su descripcion, la solucion de este problemaaporta informacion muy interesante para comprender como se comportanlos solidos cuando estan sometidos a cargas dinamicas.
En este analisis se considera una barra recta de longitud L, seccion trans-versal A de un material elastico con modulo de Young E y densidad ⇢. Sidefinimos la coordenada x de tal manera que un extremo se corresponda conx = 0 y el otro con x = L, el desplazamiento de cada una de las seccionesde la barra durante un intervalo de tiempo de tamano T se puede describircon una funcion u : [0, L]⇥ [0, T ] que satisface
⇢Au+EAu00+q = 0, u(x, 0) = u0
(x), u(x, 0) = v0
(x), u(0, t) = U(t) .(11.19)
En estas ecuaciones, q es una fuerza por unidad de longitud en direccion deleje x, u
0
y v0
son, respectivamente, el desplazamiento inicial y su velocidad,y � es el desplazamiento en la seccion correspondiente a x = 0. La seccionx = L no tiene ningun desplazamiento impedido ası que es una superficielibre.
Si se estudia una barra libre de fuerzas, es decir q = 0, es inmediatocomprobar que las funciones de la forma
u(x, t) = F (x� ct) +G(x+ ct) , (11.20)
son soluciones del problema (11.19) (esta es la llamada solucion de D’Alembertde la ecuacion de ondas). Cuando x 2 [0, L], las condiciones iniciales de des-plazamiento y velocidad implican que
u0
(x) = F (x) +G(x), v0
(x) = �cF 0(x) + cG0(x) , (11.21)
y la condicion de contorno, para t � 0,
U(t) = F 0(�ct) +G0(ct) . (11.22)
Las dos componentes de la solucion (11.20) se llaman las caracterısticas. Laprimera, F , desplaza hacia valores de x positivos la solucion en cada instante;la segunda caracterıstica, G, desplaza la solucion en sentido contrario.
Consideremos, finalmente, el caso mas sencillo: la barra, inicialmente enreposo, tiene el extremo x = L libre y el extremo x = 0 con un despla-zamiento impuesto U(t), como se describıa anteriormente. De las condicio-nes (11.21) concluimos que F (x) = �G(x) = ↵, para todo x 2 [0, L], siendo↵ una constante. De la condicion de contorno en x = 0 se obtiene que
F (�ct) = U(t)�G(ct) , (11.23)
para todo ct � 0. De forma equivalente,
F (x) = U(�x
c)�G(�x) (11.24)

Capıtulo 11. Dinamica de solidos 225
para x 0. Como el extremo x = L esta libre de fuerzas, u0(L, t) = 0 y portanto
F 0(L� ct) +G0(L+ ct) = 0 (11.25)
para todo t � 0 o, de otra manera,
G0(x) = �F 0(2L� x) (11.26)
que implica
G(x) = G(L)�Z x
LF 0(2L� ⇠) d⇠,= ↵�
Z x
LF 0(2L� ⇠) d⇠, (11.27)
para x � L. Combinando el valor de F,G, conocido ya en [0, L], y lasrelaciones (11.24) y (11.27) podemos calcular el valor de la solucion u entodo instante de tiempo. Como la definicion de F depende del valor de G yviceversa, el proceso de calculo ha de hacerse recursivamente. Por ejemplo,para x 2 [�L, 0], la ecuacion (11.24) nos permite evaluar
F (x) = U(�x
c)� ↵ . (11.28)
A continuacion, para x 2 [L, 2L] extendemos G utilizando (11.27) y (11.28),resultando
G(x) = ↵ para x 2 [L, 2L] . (11.29)
Continuando sucesivamente, para x 2 [�2L,�L],
F (x) = U(�x
c)� ↵ . (11.30)
Para x 2 [2L, 3L],
G(x) = G(2L)�Z x
2LF 0(2L� ⇠) d⇠
= ↵�Z x
2L
1
cU 0(
⇠ � 2L
c) d⇠
= ↵� U
✓
x� 2L
c
◆
.
(11.31)
El proceso se puede repetir hasta encontrar la solucion de F y G para todo x.La solucion (11.20) admite la siguiente interpretacion. Fijando un sec-
cion, x = x, su desplazamiento u es nulo durante un periodo de tiempo,mientras que t < x/c. Hasta ese instante,
u(x, t) = F (x� ct) +G(x+ ct) = ↵� ↵ = 0 . (11.32)
Un poco despues, cuando x/c t (2L� x)/c, la solucion pasa a ser
u(x, t) = F (x� ct) +G(x+ ct) = U⇣
t� x
c
⌘
. (11.33)
226 Mecanica de solidos, I. Romero
M M M
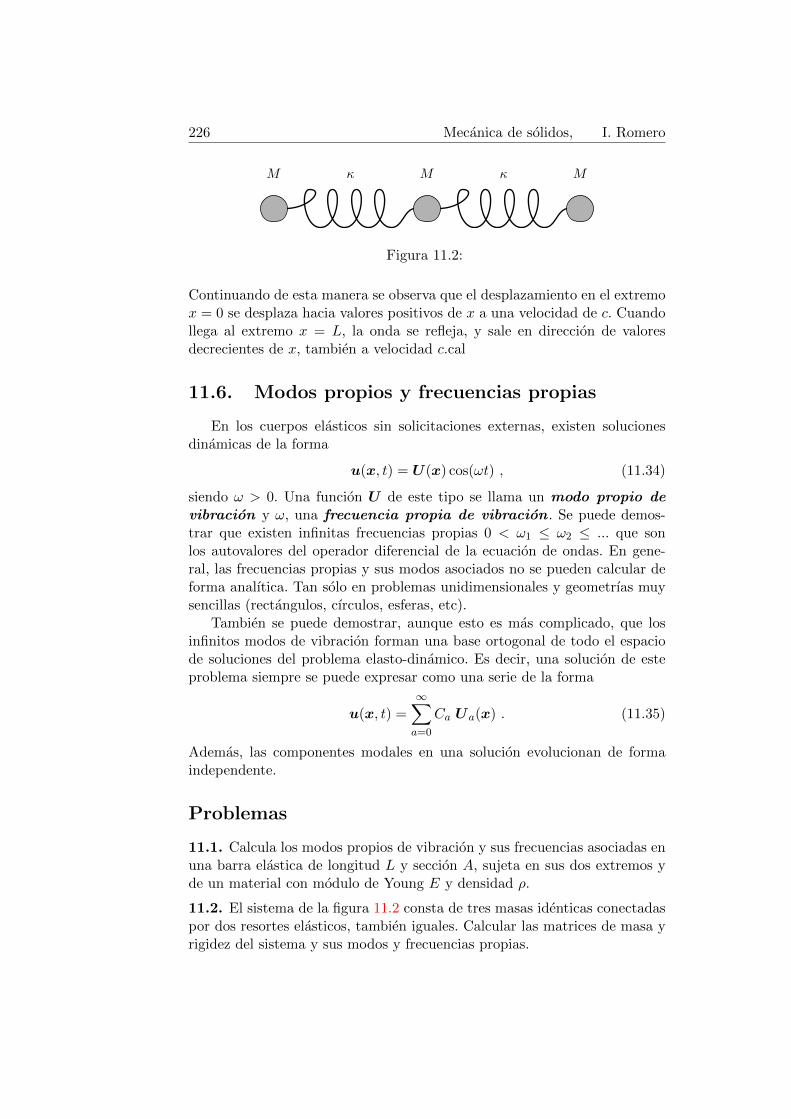
Figura 11.2:
Continuando de esta manera se observa que el desplazamiento en el extremox = 0 se desplaza hacia valores positivos de x a una velocidad de c. Cuandollega al extremo x = L, la onda se refleja, y sale en direccion de valoresdecrecientes de x, tambien a velocidad c.cal
11.6. Modos propios y frecuencias propias
En los cuerpos elasticos sin solicitaciones externas, existen solucionesdinamicas de la forma
u(x, t) = U(x) cos(!t) , (11.34)
siendo ! > 0. Una funcion U de este tipo se llama un modo propio devibracion y !, una frecuencia propia de vibracion . Se puede demos-trar que existen infinitas frecuencias propias 0 < !
1
!2
... que sonlos autovalores del operador diferencial de la ecuacion de ondas. En gene-ral, las frecuencias propias y sus modos asociados no se pueden calcular deforma analıtica. Tan solo en problemas unidimensionales y geometrıas muysencillas (rectangulos, cırculos, esferas, etc).
Tambien se puede demostrar, aunque esto es mas complicado, que losinfinitos modos de vibracion forman una base ortogonal de todo el espaciode soluciones del problema elasto-dinamico. Es decir, una solucion de esteproblema siempre se puede expresar como una serie de la forma
u(x, t) =1X
a=0
Ca Ua(x) . (11.35)
Ademas, las componentes modales en una solucion evolucionan de formaindependente.
Problemas
11.1. Calcula los modos propios de vibracion y sus frecuencias asociadas enuna barra elastica de longitud L y seccion A, sujeta en sus dos extremos yde un material con modulo de Young E y densidad ⇢.
11.2. El sistema de la figura 11.2 consta de tres masas identicas conectadaspor dos resortes elasticos, tambien iguales. Calcular las matrices de masa yrigidez del sistema y sus modos y frecuencias propias.