Determinación de los diagramas de fases
13
Determinación de los diagramas de fases para algunos sistemas dinámicos Julio Pozo y Jonathan Makuc Departamento de Ciencias Básicas Facultad de Ciencias de la Ingeniería Universidad Diego Portales Casilla 298-V, Santiago e-mail: [email protected] Resumen En este trabajo se determinan los diagramas de fases que permiten realizar la descripción del comportamiento del movimiento en el espacio de fase de algunos sistemas oscilatorios y/o giratorios. Para el caso del movimiento de un péndulo plano, las magnitudes relevantes son el ángulo θ y su derivada temporal , las cuales representan las variables y corresponden a las coordenadas de un espacio bidimensional llamado espacio de fase. θ & Con respecto al movimiento del péndulo plano en el espacio de fase, se obtienen y analizan tres situaciones que se consideran relevantes: Movimiento oscilatorio para energías menores que la energía total de referencia, que en el espacio de fase quedan representadas por curvas cerradas como elipses. Movimiento circular rotatorio para energía mayores que la de referencia y Movimiento crítico separatriz cuando la energía del péndulo plano es igual a la de referencia. También se determinan numéricamente (mediante la utilización de maple), los diagramas de fases tanto para el movimiento de un péndulo plano amortiguado como para el movimiento de un péndulo plano amortiguado forzado. Con respecto al movimiento en el espacio de fase del péndulo amortiguado, los resultados numéricos muestran que la energía decrece monótonamente a lo largo de las trayectorias, obteniéndose que el atractor es un punto. Sin embargo para el caso del péndulo amortiguado forzado las curvas en el espacio de fase se empiezan a abrir en espiral hasta alcanzar un ciclo límite que permite formar una órbita elíptica, obteniéndose que en estas condiciones el atractor es una elipse.
-
Upload
luis-ramirez -
Category
Documents
-
view
692 -
download
4
Transcript of Determinación de los diagramas de fases

Determinación de los diagramas de fases para algunos sistemas dinámicos
Julio Pozo y Jonathan Makuc
Departamento de Ciencias Básicas Facultad de Ciencias de la Ingeniería
Universidad Diego Portales Casilla 298-V, Santiago
e-mail: [email protected]
Resumen En este trabajo se determinan los diagramas de fases que permiten realizar la descripción del comportamiento del movimiento en el espacio de fase de algunos sistemas oscilatorios y/o giratorios. Para el caso del movimiento de un péndulo plano, las magnitudes relevantes son el ángulo θ y su derivada temporal , las cuales representan las variables y corresponden a las coordenadas de un espacio bidimensional llamado espacio de fase.
θ&
Con respecto al movimiento del péndulo plano en el espacio de fase, se obtienen y analizan tres situaciones que se consideran relevantes: Movimiento oscilatorio para energías menores que la energía total de referencia, que en el espacio de fase quedan representadas por curvas cerradas como elipses. Movimiento circular rotatorio para energía mayores que la de referencia y Movimiento crítico separatriz cuando la energía del péndulo plano es igual a la de referencia. También se determinan numéricamente (mediante la utilización de maple), los diagramas de fases tanto para el movimiento de un péndulo plano amortiguado como para el movimiento de un péndulo plano amortiguado forzado. Con respecto al movimiento en el espacio de fase del péndulo amortiguado, los resultados numéricos muestran que la energía decrece monótonamente a lo largo de las trayectorias, obteniéndose que el atractor es un punto. Sin embargo para el caso del péndulo amortiguado forzado las curvas en el espacio de fase se empiezan a abrir en espiral hasta alcanzar un ciclo límite que permite formar una órbita elíptica, obteniéndose que en estas condiciones el atractor es una elipse.
1. Introducción La forma más tradicional para describir el caso de un movimiento oscilatorio, es representar tanto el desplazamiento x como su velocidad dtdxx /=& en función del tiempo, es decir presentar los gráficos y respectivamente. Sin embargo existe otra representación del movimiento oscilatorio que es de gran utilidad para diversas situaciones, esto consiste en representar en un espacio bidimensional. Esta representación (en donde se representa
)(t
)
x
(x
)(tx&
fx =&x a lo largo de la abscisa y a lo largo de la ordenada) se conoce con
el nombre de espacio de fase. De esta forma, la descripción del movimiento oscilatorio queda completamente determinado en función del tiempo, cuando se conocen dos magnitudes: el desplazamiento y su velocidad , en donde se supone que las magnitudes anteriores correspondan a las coordenadas de un punto en un espacio bidimensional llamado espacio de fase.
x&
)t(x )(tx&
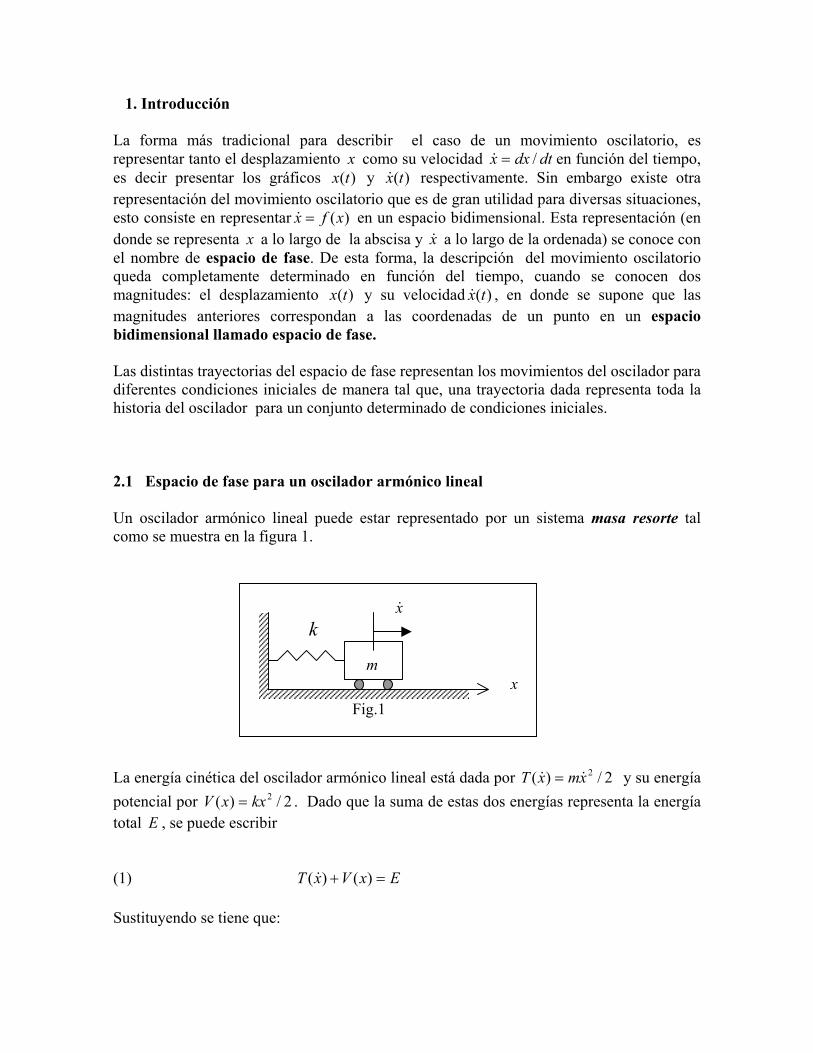
Las distintas trayectorias del espacio de fase representan los movimientos del oscilador para diferentes condiciones iniciales de manera tal que, una trayectoria dada representa toda la historia del oscilador para un conjunto determinado de condiciones iniciales. 2.1 Espacio de fase para un oscilador armónico lineal Un oscilador armónico lineal puede estar representado por un sistema masa resorte tal como se muestra en la figura 1.
Fig.1
mx
kx&
La energía cinética del oscilador armónico lineal está dada por T y su energía potencial por V . Dado que la suma de estas dos energías representa la energía total
2/)( 2xmx && =2/)( 2kxx =
E , se puede escribir (1) T ExVx =+ )()( & Sustituyendo se tiene que:

(2) Ekxxm =+ 22
21
21
&
donde la energía total (constante de movimiento) se puede escribir como 2
21 kAE = , siendo
la amplitud de la oscilación. A La ecuación (2) también se puede expresar en la forma
(3) 1/2/2
22
=+mE
xkE
x &
Por otro lado, teniendo presente la ecuación de una elipse
(4) 12
2
2
2
=+by
ax
Comparando estas dos últimas expresiones. El movimiento del oscilador armónico se puede representar en el espacio de fase como una elipse cuyos semiejes son kE /2=a y
mEb /2= , también Ab ω= con mk /=ω La ecuación (4) representa una familia de elipses ( xy &= ), tal como que se muestra en la figura. 2
2
a x
Cada trayectoria dy del oscilador2Ela masa , el punEn la figura 2, par
m
Fig.
x&b
1E
2E
0
el espacio de fase corresponde a un valor constante de la energía total lineal, en donde
1E
21 EE < (cabe destacar que durante una oscilación de to representativo recorre la elipse en el sentido de los punteros del reloj). a la elipse con energía total 2EE = : y representan a los semiejes a b

mayor y menor respectivamente. Todos los puntos para los cuales la velocidad se hace cero ( ) corresponden a los puntos de retorno. 0=x&
m
La representación en espacio de fase de este tipo de movimiento es una curva cerrada puesto que los valores de y se repiten en cada periodo. )(tx )(tx& 2.2 Espacio de fase para un péndulo plano: En la figura 3 se muestra un péndulo plano, el cual está formado por una masa m suspendida desde un punto O mediante una barra delgada de masa despreciable y de longitud l . El ángulo θ se define como positivo cuando el péndulo está a la derecha del punto más bajo de la trayectoria para 0=y y negativo en caso contrario (ver figura 3)
Fig.3
θ
m
l
πθ =πθ −=
0)0( =y
)cos1()( θθ −= ly
ly 2)( =±π
- +
O
La energía cinética del péndulo es )(21 22 yxm && +=T . Dado que las coordenadas de la masa
están dadas por: θsenlx = ; )cos1( θ−= ly entonces e , elevando al cuadrado y luego sustituyendo se encuentra que
θθ cos&& lx = θθ sen&& ly =

(5) 22
21 θ&ml=T
Por otro lado, la energía potencial con respecto al punto de equilibrio (punto más bajo de la trayectoria) esta dada por: (6) )cos1()( θθ −≡= mglmgyV En estas condiciones, la energía total toma la forma:
(7) )cos1(21 22 θθ −+= mglmlE &
A partir de la ecuación (7), se encuentra que
(8) [ ])cos1(/22)( 0 θθθ −−±= EElg& con mglEE 2)(0 =±= π
Cuando para el péndulo se consideran amplitudes pequeñas (o energías pequeñas), la ecuación para la energía total toma una forma similar a la del oscilador armónico unidimensional ecuación (2).
Sea θ pequeño, entonces 2
12θθ −≈cos y la energía total se expresa en la forma
(9) 222
21
21)0( θθθ mglmlEPén +=→ &
Expresión que se puede comparar directamente con la energía total del oscilador dada por
(10) 22
21
21 kxxmEOsci += &
Dada la estructura de ambas ecuaciones, la equivalencia queda establecida al realizar las asociaciones que se muestran en la siguiente tabla:
Oscilador Armónico unidimensional
Péndulo plano (ángulos pequeños)
x θ x& θ& m 2ml k mgl

Esto es, para ángulos pequeños del péndulo con θ y como variables del espacio de fase, es válida la descripción realizada en el punto 2.2) para el oscilador armónico unidimensional, y los diagramas siguen siendo elipses pero ahora con semiejes dados por
θ&
)/(2 mglE=a y )/(2 2mlE=b 2.3 Ecuación de movimiento del péndulo plano (ángulos pequeños) La ecuación de movimiento para ambos sistemas, se puede obtener a partir de la consideración que la energía total es una constante de movimiento y su derivada temporal es cero
(11) 00
00
22
2
=+⇒=+=
=+⇒=+=
θωθθθθθ
ω
pp
oOsc
mglmldt
dE
xxxkxxxmdt
dE
&&&&&&
&&&&&&
Las soluciones respectivas de las ecuaciones diferenciales de movimiento, están dadas por:
(12) )cos()()cos()(
βωθαω
+=+=
tBttAtx
p
o con lgmk po /;/ == ωω
Cabe destacar que las ecuaciones de movimientos (11) pueden ser obtenidas mediante el formalismo de Lagrange o directamente de la mecánica Newtoniana. 2.3.1 Espacio de fase del péndulo para cualquier ángulo
Cuando la amplitud o la energía aumenta, la aproximación anterior 2
12θθ −≈cos ya no es
válida, como asimismo la ecuación de movimiento para el péndulo plano obtenida a partir de la derivada temporal de la energía toma la forma:
0)cos1(21 22 =
−+= θθ mglml
dtd
dtdE &
(13) ml 0sen0)(sen 22 =+⇒=+ θωθθθθθ pmgl &&&&&&
Para que esta ecuación de movimiento sea igual a la de ángulos pequeños, se debe cumplir que θθ ≈sen , no obstante que, a medida que el ángulo aumenta se hace más significativa la
diferencia entre el seno del ángulo y el ángulo, lo cual significa que se debe resolver la ecuación de movimiento que involucra a la función seno del ángulo, que es una ecuación diferencial no lineal no fácil de resolver para encontrar sus soluciones. Sin embargo como estamos interesados en describir el movimiento del péndulo plano en el espacio de fase, esto se logra fácilmente a partir de la ecuación obtenida anteriormente y dada por )(θθ f=&
[ ])
θ&
θ )(01 5.0 EE =
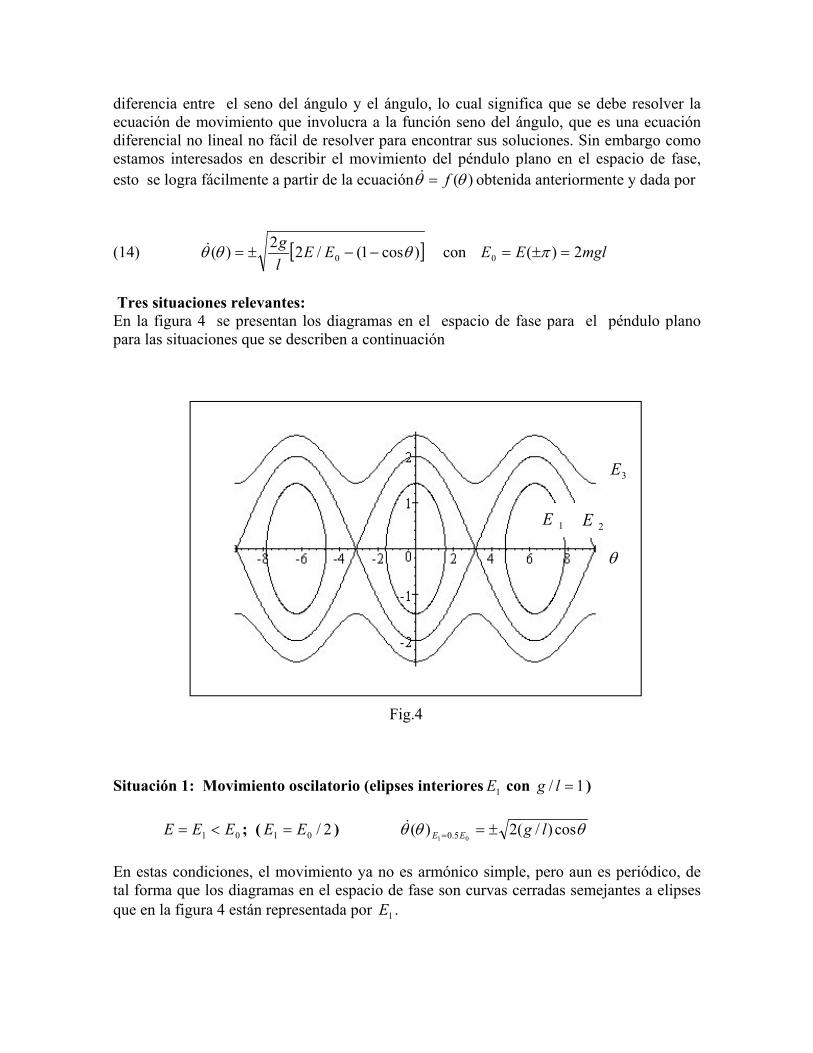
(14) cos1(/22)( 0 θθθ −−±= EElg& con mglEE 2)(0 =±= π
Tres situaciones relevantes: En la figura 4 se presentan los diagramas en el espacio de fase para el péndulo plano para las situaciones que se describen a continuación
3E
2E1E
θ
Fig.4
Situación 1: Movimiento oscilatorio (elipses interiores con 1E 1/ =lg ) ; ( ) 01 EEE <= 2/01 EE = θθ cos)/(2 lg±=& En estas condiciones, el movimiento ya no es armónico simple, pero aun es periódico, de tal forma que los diagramas en el espacio de fase son curvas cerradas semejantes a elipses que en la figura 4 están representada por . 1E

Situación 2: Movimiento rotatorio circular (curvas externas con ) 3E 1/ =lg ( ) 03 EEE >= 03 2EE = [ ])cos1(0.4)/(0.2)(
03 2 θθθ −−±== lgEE&
Esta situación corresponde al caso en que el péndulo tiene energía suficiente como para llegar al punto más alto πθ m= y seguir su movimiento hacia el otro lado, su velocidad angular que es mínima en este punto se puede determinar a partir de la ecuación (14), obteniéndose. (15) [ ] lglgEE /2))cos(1(0.4/2)(
03 2 =±−−±=± = ππθ&
y su energía cinética 02221
21)(
2
222 ≠=
==±= mgl
lgmlml θπθ &T es la que le
permite al péndulo pasar al otro lado y realizar un movimiento rotatorio atenuado por la función coseno o modulado periódicamente. La velocidad angular en el punto más bajo 0=θ , la que es máxima se determina a partir de (15) [ ] lglglgEE /83.2/8))0cos(1(0.4/2)0(
03 2 ==−−±==θ& Cuando el péndulo pasa por el punto más alto el ángulo θ cambia de π− a π+ o al revés dependiendo del sentido de la rotación, esta situación en el diagrama de fase está representada por las curvas externas 3E Situación 3: Movimiento crítico separatriz (curvas intermedias con ) 2E 1/ =lg (16) 02 EEE =≡ [ ])cos1(2)/(2)(
02θθθ −−±== lgEE
& (Curvas intermedias) Esta situación, corresponde a un caso crítico, en el cual la energía cinética en el punto más bajo de la trayectoria ( )0=θ es igual a la energía potencial en el punto más alto ( )πθ ±= . Utilizando la ecuación (16) con 1/ =lg es fácil verificar lo expresado anteriormente. Determinemos primero la velocidad angular en el punto más bajo θ&
(17) [ ]lg
lg 2)0cos1(22)0( =−−±=θ&
La energía cinética para este punto toma el valor
(18) 0
2
222 2221
21)0( Emgl
lgmlml ≡=
=== θθ &T
Es fácil ver que la velocidad angular en el punto más alto es cero, esto es: 0)( =±πθ&

de donde se encuentra que la energía cinética también es nula. 0)( =±= πθT Determinemos ahora la energía potencial para el punto más alto V 02))cos(1()( Emglmgl ≡=±−=±= ππθ y la energía potencial en el punto más bajo es nula 0)0( ==θV De lo cual se concluye que cuando 0EE = , entonces )()0( πθθ ±=== VT . Esta situación está representada en el diagrama de fase por las curvas intermedias y se conocen con el nombre separatrices, puesto que son la frontera entre el movimiento oscilatorio con y el movimiento circular con .
1E
0EE < 0EE >
Cuando el péndulo alcanza el punto más alto éste debería permanecer ahí, sin embargo por tratarse de un punto de energía potencial máxima es un punto de equilibrio inestable, entonces el péndulo por efecto de alguna perturbación, puede desplazarse en una u otra dirección y los puntos
0)( =±= πθθ&
πθ m= que son donde se encuentran las dos ramas separatrices son puntos singulares. En la figura 5 se muestran más antecedentes de lo descrito anteriormente.
fig. 5
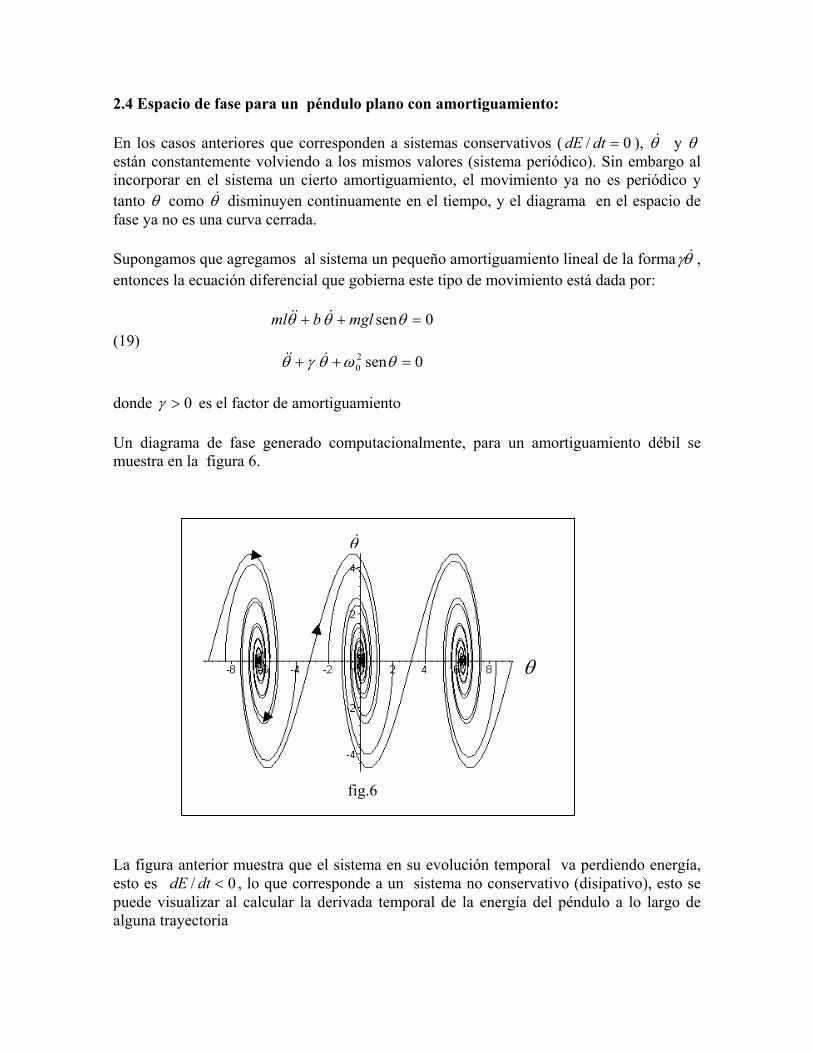
2.4 Espacio de fase para un péndulo plano con amortiguamiento: En los casos anteriores que corresponden a sistemas conservativos ( ), y 0/ =dtdE θ& θ están constantemente volviendo a los mismos valores (sistema periódico). Sin embargo al incorporar en el sistema un cierto amortiguamiento, el movimiento ya no es periódico y tanto θ como disminuyen continuamente en el tiempo, y el diagrama en el espacio de fase ya no es una curva cerrada.
θ&
Supongamos que agregamos al sistema un pequeño amortiguamiento lineal de la forma , entonces la ecuación diferencial que gobierna este tipo de movimiento está dada por:
θγ &
ml 0sen =++ θθθ mglb &&&
(19) 0sen2
0 =++ θωθγθ &&&
donde 0>γ es el factor de amortiguamiento Un diagrama de fase generado computacionalmente, para un amortiguamiento débil se muestra en la figura 6.
θ&
θ
fig.6
La figura anterior muestra que el sistema en su evolución temporal va perdiendo energía, esto es , lo que corresponde a un sistema no conservativo (disipativo), esto se puede visualizar al calcular la derivada temporal de la energía del péndulo a lo largo de alguna trayectoria
0/ <dtdE

(20) )sen(cos21 22 θθθθθ mglmlmglml
dtd
dtdE
+=
−= &&&&
Por otro lado, después de multiplicar la ecuación (19) por se encuentra θ& (21) 2)sen( θθθθ &&&& bmglml −=+ Comparando (20) con (21) se obtiene:
02 ≤−= θ&bdtdE
De esta forma la energía decrece monótonamente a lo largo de las trayectorias, excepto para los puntos en los que (el atractor es un punto) 0=θ& Más antecedentes de lo descrito anteriormente se muestra en la figura 7
fig.7
2.5 Espacio de fase para un péndulo plano con amortiguamiento y forzado: La ecuación de movimiento que describe el caso de un péndulo amortiguado forzado, se obtiene al agregar a (19) un término correspondiente a la fuerza externa aplicada , con lo cual se puede escribir
0F

(22) tmlF
aωθωθγθ cossen 020 =++ &&&
En las figuras 8 se presentan los diagramas de fases (que representan soluciones numéricas de la ecuación diferencial (22 ).
20=aω 15=aω
fig. 8 a): fig. 8b):
fig. 8 c): 10=aω fig.8 d) 5=aω

2.6 Resultados finales y conclusiones: Con respecto al movimiento en el espacio de fase del péndulo amortiguado, los resultados numéricos muestran que la energía decrece monótonamente a lo largo de las trayectorias, obteniéndose que el atractor es un punto (figuras 6 y 7). Sin embargo para el caso del péndulo amortiguado forzado las curvas en el espacio de fase se empiezan a abrir en espiral hasta alcanzar un ciclo límite que permite formar una órbita elíptica, obteniéndose que en estas condiciones el atractor es una elipse (figuras 8). En estas figuras se puede apreciar que dependiendo de las condiciones iniciales, las curvas se empiezan a abrir en espiral hasta alcanzar un ciclo límite (órbitas elípticas, el atractor es una elipse). Se encuentra que el movimiento descrito por el sistema es muy sensible a la frecuencia aω de la fuerza aplicada, lo anterior se debe fundamentalmente a la presencia de los términos no lineales que son los producen resonancias y el movimiento forzado no lineal se vuelve muy irregular o caótico, las órbitas en el espacio de fase quedan representadas por trayectorias irregulares y aparentemente confusas, sin embargo es apreciable y notoria la tendencia del sistema a alcanzar este ciclo límite, en el sentido de la convergencia que muestran algunas órbitas para formar curvas cerradas propias del movimiento periódico. Con respecto a la tendencia del sistema a alcanzar estos ciclos límites (atractores), se puede realizar el siguiente análisis. Si en la expresión (22) se consideran ángulos pequeños, las oscilaciones forzadas de péndulo amortiguado corresponden a las oscilaciones de un oscilador amortiguado lineal, y éstas tiene que ver con un movimiento de régimen estacionario, que se alcanza después de ser superados los efectos de amortiguamiento como consecuencia de la fuerza aplicada, es así como el sistema evoluciona hasta alcanzar una oscilación estacionaria que corresponde a un ciclo límite (atractor). Finalmente cabe destacar las ventajas que ofrece el espacio de fase, en la descripción del comportamiento dinámico en estudio del movimiento en algunos sistemas de interés. La información que entregan los diagramas de fases, es relevante puesto que permite obtener directamente una serie de resultados, sin tener que recurrir a grandes desarrollos y complejos cálculos matemáticos propios de los sistemas dinámicos no lineales. Bibliografía: 1. Steven H. Strogatz: Nonlinear Dynamics and Chaos, Addison Wesley 1994 2. Lawrence Perko: Differential Equations and Dymanical System, Springer Verlag 1991 3. Gerald J. Sussman and Jack Wisdon: Structure and Interpretation of Classical
Mechanics, ©2001 The Massachusetts Institute of Technology. 4. Robert L. Devaney: Chaotic Dynamical Systems, Addison Wesley 1994.