Derivadas deFunciones Vectoriales
3
643 11.10. Derivadas de funciones vectoriales 11.10. DERIVADAS DE FUNCIONES VECTORIALES En la sección anterior se estudió que la velocidad v de una partícula en movimiento curvilíneo puede representarse mediante la derivada de la función vectorial r(t) que caracteriza a la posición de la partícula. De manera similar, la aceleración a de la partícula se representa mediante la derivada de una función vectorial v(t). Esta sección proporciona una definición formal de la derivada de una función vectorial y establece reglas que gobiernan la diferenciación de sumas y productos de fun- ciones vectoriales. Sea P(u) una función vectorial de la variable escalar u. Por lo ante- rior se entiende que el escalar u define por completo la magnitud y dirección del vector P. Si el vector P se dibuja desde un origen fijo O y se deja variar el escalar u, la punta de P describirá una curva deter- minada en el espacio. Considérense los vectores P que corresponden, respectivamente, a los valores u y u u de la variable escalar (figura 11.16a). Sea P el vector que une las puntas de los dos vectores dados, se escribe P P(u u) P(u) Al dividir todo entre u y dejar que u tienda a cero, se define la deri- vada de la función vectorial P(u): lím uy0 lím uy0 (11.19) Conforme u tiende a cero, la línea de acción de P vuelve tangente a la curva de la figura 11.16a). De este modo, la derivada dPdu de la función vectorial P(u) es tangente a la curva descrita por la punta P(u) (figura 11.16b). Las reglas comunes para la diferenciación de sumas y productos de funciones escalares pueden extenderse a las funciones vectoriales. Considérese primero la suma de dos funciones vectoriales P(u) y Q(u) de la misma variable escalar u. De acuerdo con la definición dada en (11.19), la derivada del vector P Q es lím uy0 lím uy0 o, puesto que el límite de una suma es igual a la suma de los límites de sus términos, lím uy0 lím uy0 (11.20) Hay que considerar ahora el producto de una función escalar f(u) y una función vectorial P(u) de la misma variable. La derivada del vec- tor f P es lím uy0 lím uy0 P f P u f u (f f )(P P) f P u d(f P) du dQ du dP du d(P Q) du Q u P u d(P Q) du Q u P u (P Q) u d(P Q) du P(u u) P(u) u P u dP du Figura 11.16 x y z O a) P (u) P (u) b) dP du x y z O P www.FreeLibros.me DEMO : Purchase from www.A-PDF.com to remove the watermark
-
Upload
camilo-estrada -
Category
Documents
-
view
2 -
download
0
description
funciones vectoriales
Transcript of Derivadas deFunciones Vectoriales

64311.10. Derivadas de funciones vectoriales11.10. DERIVADAS DE FUNCIONES VECTORIALES
En la sección anterior se estudió que la velocidad v de una partícula enmovimiento curvilíneo puede representarse mediante la derivada de lafunción vectorial r(t) que caracteriza a la posición de la partícula. Demanera similar, la aceleración a de la partícula se representa mediantela derivada de una función vectorial v(t). Esta sección proporciona unadefinición formal de la derivada de una función vectorial y establecereglas que gobiernan la diferenciación de sumas y productos de fun-ciones vectoriales.
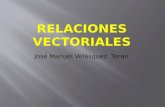
Sea P(u) una función vectorial de la variable escalar u. Por lo ante-rior se entiende que el escalar u define por completo la magnitud ydirección del vector P. Si el vector P se dibuja desde un origen fijo Oy se deja variar el escalar u, la punta de P describirá una curva deter-minada en el espacio. Considérense los vectores P que corresponden,respectivamente, a los valores u y u � �u de la variable escalar (figura11.16a). Sea �P el vector que une las puntas de los dos vectores dados,se escribe
�P � P(u � �u) � P(u)
Al dividir todo entre �u y dejar que �u tienda a cero, se define la deri-vada de la función vectorial P(u):
� lím�uy0
� lím�uy0
(11.19)
Conforme �u tiende a cero, la línea de acción de �P vuelve tangentea la curva de la figura 11.16a). De este modo, la derivada dP�du de lafunción vectorial P(u) es tangente a la curva descrita por la punta P(u)(figura 11.16b).
Las reglas comunes para la diferenciación de sumas y productos defunciones escalares pueden extenderse a las funciones vectoriales.Considérese primero la suma de dos funciones vectoriales P(u) y Q(u)de la misma variable escalar u. De acuerdo con la definición dada en(11.19), la derivada del vector P � Q es
� lím�uy0
� lím�uy0 � � �
o, puesto que el límite de una suma es igual a la suma de los límites desus términos,
� lím�uy0
� lím�uy0
� � (11.20)
Hay que considerar ahora el producto de una función escalar f(u)y una función vectorial P(u) de la misma variable. La derivada del vec-tor f P es
� lím�uy0
� lím�uy0 � P � f ��P
��u
�f��u
(f � �f )(P � �P) � f P���
�ud(f P)�
du
dQ�du
dP�du
d(P � Q)��
du
�Q��u
�P��u
d(P � Q)��
du
�Q��u
�P��u
�(P � Q)��
�ud(P � Q)��
du
P(u � �u) � P(u)��
�u�P��u
dP�du
Figura 11.16
x
y
z
O
a)
P(u)
P(u)
b)
dPdu
x
y
z
O
P
bee76985_ch11.qxd 10/6/09 6:55 PM Página 643
www.FreeLibros.me
DEMO : Purchase from www.A-PDF.com to remove the watermark

644 Cinemática de partículas o al recordar las propiedades de los límites de sumas y productos,
� P � f (11.21)
Las derivadas del producto escalar y el producto vectorial de dos fun-ciones vectoriales P(u) y Q(u) pueden obtenerse de manera similar. Setiene
� � Q � P � (11.22)
�d(P
d�
uQ)
� � �ddPu� � Q � P � �
ddQu� (11.23)†
Las propiedades antes establecidas pueden emplearse para deter-minar las componentes rectangulares de la derivada de una funciónvectorial P(u). Descomponiendo P en componentes a lo largo de losejes rectangulares fijos x, y, z, se escribe
P � Pxi � Py j � Pzk (11.24)
donde Px, Py, Pz son las componentes escalares rectangulares del vector P, e i, j, k los vectores unitarios correspondientes, respectivamente, a los ejes x, y y z (sección 2.12). De acuerdo con (11.20), la derivada de P es igual a la suma de las derivadas de los términos en el miembro dellado derecho. Puesto que cada uno de estos términos es el producto deuna escalar y una función vectorial, se debe usar (11.21). Pero los vectores unitarios i, j, k tienen una magnitud constante (igual a 1) y endirecciones fijas. Por lo tanto, sus derivadas son cero, y se escriben
� i � j � k (11.25)
Si se advierte que los coeficientes de los vectores unitarios son, pordefinición, las componentes escalares del vector dP�du, se concluyeque las componentes escalares rectangulares de la derivada dP/du de lafunción vectorial P(u) se obtienen al diferenciar las componentes esca-lares correspondientes de P.
Razón de cambio de un vector. Cuando el vector P es unafunción del tiempo t, su derivada dP�dt representa la razón de ca mbiode P con respecto al sistema de referencia Oxyz. Descomponiendo P,en componentes rectangulares, se tiene, por (11.25),
� i � j � k
o, al utilizar puntos para indicar diferenciación con respecto a t,
P � Pxi � Py j � Pzk (11.25�)
dPz�dt
dPy�dt
dPx�dt
dP�dt
dPz�du
dPy�du
dPx�du
dP�du
dQ�du
dP�du
d(P � Q)�
du
dP�du
df�du
d(f P)�
du
†Puesto que el producto vectorial no es conmutativo (sección 3.4), debe mantenerse elorden de los factores en la ecuación (11.23).
bee76985_ch11.qxd 10/6/09 6:55 PM Página 644
www.FreeLibros.me

64511.11. Componentes rectangulares de la velocidad y la aceleración
Como se estudiará en la sección 15.10, la razón de cambio de unvector cuando se observa desde un sistema de referencia móvil es, engeneral, diferente de su razón de cambio cuando se observa desde unsistema de referencia fijo. Sin embargo, si el sistema de referencia mó-vil O�x�y�z� está en traslación, esto es, si sus ejes permanecen parale-los a los ejes correspondientes del sistema fijo Oxyz (figura 11.17), seusan los mismos vectores unitarios i, j, k en ambos sistemas de refe-rencia, y en un instante determinado el vector P tiene las mismas com-ponentes Px, Py, Pz en ambos sistemas de referencia. Se concluye de(11.25�) que la razón de cambio P es la misma con respecto a los sis-temas de referencia Oxyz y O�x�y�z�. En consecuencia, se establece quela razón de cambio de un vector es la misma con respecto a un sistemade referencia fijo y con respecto a un sistema de referencia en trasla-ción. Esta propiedad simplificará en gran medida el trabajo, ya que setratará muchas veces con sistemas de referencia en traslación.
11.11. COMPONENTES RECTANGULARES DE LA VELOCIDAD Y LA ACELERACIÓN
Cuando la posición de una partícula P se define en cualquier instantemediante sus coordenadas rectangulares x, y y z, resulta convenientedescomponer la velocidad v y la aceleración a de la partícula en com-ponentes rectangulares (figura 11.18).
Al descomponer el vector de posición r de la partícula en compo-nentes rectangulares, se escribe
r � xi � yj � zk (11.26)
donde las coordenadas x, y, z son funciones de t. Al diferenciar dosveces, se obtiene
v � � xi � yj � zk (11.27)
a � �ddvt� � xi � ÿj � zk (11.28)
donde x, y, z y x, ÿ, z representan, respectivamente, la primera y lasegunda derivadas de x, y y z con respecto a t. Se tiene de (11.27) y(11.28) que las componentes escalares de la velocidad y la aceleraciónson
vx � x vy � y vz � z (11.29)ax � x ay � ÿ az � z (11.30)
Un valor positivo de vx indica que el componente vectorial vx está diri-gido hacia la derecha, y un valor negativo, que se dirige hacia la izquier-da. El sentido de cada uno de los otros componentes vectoriales puededeterminarse de manera similar a partir del signo de la componenteescalar correspondiente. Si se desea, es posible obtener las magnitudesy direcciones de la velocidad y la aceleración de sus componentes esca-lares mediante los métodos de las secciones 2.7 y 2.12.
El uso de las componentes rectangulares para describir la posición,la velocidad y la aceleración de una partícula es en particular efectivocuando la componente ax de la aceleración sólo depende de t, x, y/o vx,y cuando, en forma similar, ay depende únicamente de t, y y/o vy, y az
de t, z y/o vx. Las ecuaciones (11.30) pueden integrarse en ese caso de
dr�dt
Figura 11.17
Figura 11.18
z'
O'
y'
x'
x
y
z
O
P(t)
y
x
z
i
k
j
zk
xi
yjr
v
vx
vy
vz
ax
ay
az
(a)
P
y
x
z
i
k
j r
a
P
(b)
O
O
bee76985_ch11.qxd 10/6/09 6:55 PM Página 645
www.FreeLibros.me