DELIMITACIÓN, CARACTERIZACIÓN Y DETERMINACIÓN DE LA COTA MÁXIMA DE...
65
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA DELIMITACIÓN, CARACTERIZACIÓN Y DETERMINACIÓN DE LA COTA MÁXIMA DE INUNDACIÓN Y ÁREA DE PROTECCIÓN DE HUMEDALES EN LA JURISDICCIÓN DE LA CAR AVELLA RODRIGUEZ MIRYAM PAOLA GIL BERNAL DIEGO ALEJANDRO UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES INGENIERÍA TOPOGRÁFICA BOGOTÁ 2017
Transcript of DELIMITACIÓN, CARACTERIZACIÓN Y DETERMINACIÓN DE LA COTA MÁXIMA DE...

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
DELIMITACIÓN, CARACTERIZACIÓN Y DETERMINACIÓN DE LA COTA MÁXIMA DE INUNDACIÓN Y ÁREA DE PROTECCIÓN DE HUMEDALES EN LA
JURISDICCIÓN DE LA CAR
AVELLA RODRIGUEZ MIRYAM PAOLA
GIL BERNAL DIEGO ALEJANDRO
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES
INGENIERÍA TOPOGRÁFICA BOGOTÁ
2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
DELIMITACIÓN, CARACTERIZACIÓN Y DETERMINACIÓN DE LA COTA MÁXIMA DE INUNDACIÓN Y ÁREA DE PROTECCIÓN DE HUMEDALES EN LA
JURISDICCIÓN DE LA CAR
AVELLA RODRIGUEZ MIRYAM PAOLA
GIL BERNAL DIEGO ALEJANDRO
Trabajo de grado presentado como requisito parcial para optar al título de: INGENIERO TOPOGRÁFICO
Director: ING. WILLIAN BARRAGAN
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES
INGENIERÍA TOPOGRÁFICA BOGOTÁ
2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
3
Tabla de Contenido
Introducción ............................................................................................................. 7
1. Capitulo: descripción del proyecto ................................................................... 8
1.1 Planteamiento del problema ....................................................................... 8
1.2 Justificación ................................................................................................ 9
1.3 Objetivos .................................................................................................. 10
1.1.1 Objetivo General ................................................................................ 10
1.1.2 Objetivos Específicos ........................................................................ 10
2. Capitulo: estructuración del proyecto ............................................................. 11
2.1 Marco teórico ........................................................................................... 11
2.1.1 Localización ....................................................................................... 11
2.1.2 Humedales ........................................................................................ 14
2.1.3 Definición de Humedales ................................................................... 14
2.1.4 Importancia De Los Humedales......................................................... 14
2.1.5 Humedales por Origen ....................................................................... 15
2.2 Definición de levantamiento topográfico ................................................... 16
2.3 Métodos de levantamiento topográfico convencional ............................... 17
2.4 Levantamientos por métodos de posicionamiento global (GPS – GNSS).19
2.4.1 Métodos de observación GPS ........................................................... 20
2.5 Batimetría ................................................................................................. 25
2.5.1 Métodos Batimétricos ........................................................................ 26
2.6 Sistemas Aéreos No Tripulados ............................................................... 27
2.6.1 Levantamiento mediante Drone eBee ............................................... 29
2.7 Postfly terra 3D ........................................................................................ 33
2.8 Marco Legal ............................................................................................. 33
3. Metodología ................................................................................................... 34
3.1 Flujo de trabajo ........................................................................................ 34
3.2 Materiales ................................................................................................. 34
3.3 Vuelo Fotogramétrico ............................................................................... 35
3.3.1 Trabajo en oficina .............................................................................. 35
3.3.2 Trabajo en Campo ............................................................................. 37

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
4
3.4 Georreferenciación ................................................................................... 38
3.4.1 Demarcación de los Puntos de Control (GCP) .................................. 38
3.4.2 Georreferenciación Puntos de Control (gcp) ..................................... 39
3.5 Ejecución de los vuelos con el Drone ebee .............................................. 40
3.6 Criterios de levantamiento batimétrico ..................................................... 41
3.7 Metodología Batimétrica empleada en los Humedales ............................ 42
3.8 Procesamiento de los Vertices de Apoyo ................................................. 44
3.9 Procesamiento del Levantamiento Batimétrico ........................................ 46
3.10 Procesamiento Digital Postflight terra 3D-EB ........................................ 46
3.10.1 Geo-etificado de las Fotografías .................................................... 47
3.10.2 Densificación de la Nube de Puntos ............................................... 48
3.10.3 Orto Mosaico y DTM....................................................................... 49
4. Resultados ........................................................................................................ 50
4.1 Listado de coordenadas de puntos de control por humedal ..................... 50
4.2 Procesamiento Digital POSTFLIGHT TERRA 3D-EB .............................. 51
4.2.1 Traslapo de Imágenes ....................................................................... 51
4.2.2 Orto mosaico y MDS .......................................................................... 53
4.2.3 Planos Finales ................................................................................... 55
5. Analisis de resultados .................................................................................... 59
6. Conclusiones .................................................................................................. 63
7. Bibliografía ..................................................................................................... 65

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
5
Tabla de Ilustraciones
Ilustración 1: Diagrama de Localización ………………………………………………...13
Ilustración 2: Localización de Humedales La herrera y Santa Bárbara……….......…….13
Ilustración 3: Localización de Humedales Chocontá y Pantano Largo…………………14
Ilustración 4: Mediciones topográficas y su representación en un plano………………..17
Ilustración 5: Radiación de detalles con equipo convencional……………………………18
Ilustración 6: Opciones para Posicionamiento GPS-GNSS………………………………19
Ilustración 7: Red de Apoyo - Levantamiento estático……………………………………20
Ilustración 8: Mediciones cinemáticas con GPS…………………………………………..22
Ilustración 9: Método tiempo real (RTK)……………………………………………………24
Ilustración 10: Mediciones por el método GPS stop and go……………………………..25
Ilustración 11: Diseño 3D - planeación de vuelo…………………………………………..30
Ilustración 12: Parámetros de diseño de vuelo…………………………………………….31
Ilustración 13: Planeación y Simulación de Vuelos………………………………………..31
Ilustración 14; Control y planeación intuitiva del vuelo a través
del software eMotion 2……………………………………………………………………....32
Ilustración 15: Flujo de trabajo…………………………………………………………..….34
Ilustración 16: Diseño de vuelo……………………………………………………………..35
Ilustración 17: Cambios de altura de las líneas de vuelos proyectadas
en el terreno…………………………………………………………………………………..36
Ilustración 18: Control y planeación del vuelo a través del software eMotion 2…….....36
Ilustración 19: Diseño de Puntos de Control……………………………………….………37
Ilustración 20: Materialización y Posicionamiento Vértice Base………………………...38
Ilustración 21: Demarcación y Posicionamiento de los GCP…………………………….39
Ilustración 22: Control de calidad de los traslapos……………………………………….41
Ilustración 23: Batimetría con maquina anfibio…………………………………………….42
Ilustración 24: Batimetría con bote………………………………………………………….43
Ilustración 25: Batimetría con traje fontanero……………………………………………...43
Ilustración 26: Importación de datos crudos para procesamiento……………………….44
Ilustración 27: Solución de ambigüedades…………………………………………………45
Ilustración 28: Obtención de velocidades, transformación de
coordenadas y ajuste de elevaciones software Magna SirgasPro3……………………45
Ilustración 29: Recopilación de observaciones RTK……………………………….…….46
Ilustración 30: Orientación de líneas de vuelo y Aero triangulación
fotogramétrica………………………………………………………………………………...48
Ilustración 31: Densificación de la nube de puntos……………………………………….48
Ilustración 32: Orto Mosaico y curvas de nivel procesadas……………………………..49
Ilustración 33: Control de calidad de los traslapos Humedal La Herrera……………..52
Ilustración 34: Control de calidad de los traslapos Humedal Santa Bárbara………….52
Ilustración 35: Control de calidad de los traslapos Humedal Pantano Largo………...53
Ilustración 36: Control de calidad de los traslapos Humedal Chocontá…………….…53
Ilustración 37: Orto Mosaico geo referenciado y Modelos de superficie MDS
para Humedal La Herrera, generados con las imágenes procesadas del

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
6
vuelo
eBee…………………………………………………………………………………………...53
Ilustración 38: Orto Mosaico geo referenciado y Modelos de superficie
MDS para Humedal Santa Bárbara, generados con las imágenes
procesadas del vuelo eBee………………………………………………..………………..54
Ilustración 39: Orto Mosaico geo referenciado y Modelos de superficie
MDS para Humedal Pantano Largo, generados con las imágenes
procesadas del vuelo eBee……………………………………………………………..…..54
Ilustración 40: Orto Mosaico geo referenciado y Modelos de superficie
MDS para Humedal Chocontá, generados con las imágenes
procesadas del vuelo eBee………………………………………………………………....55
Ilustración 41: Orto mosaico y curvas de nivel resultantes del
modelamiento con drone eBee…………………………………………………………..…55
Ilustración 42: Planimetría Humedal La Herrera…………………………………............56
Ilustración 43: Orto mosaico y curvas de nivel resultantes del
modelamiento con drone eBee…………………………………………………………......56
Ilustración 44: Planimetría Humedal Santa Bárbara………………………………..........57
Ilustración 45: Orto mosaico y curvas de nivel resultantes del
modelamiento con drone eBee……………………………………………………………..57
Ilustración 46: Orto mosaico y curvas de nivel resultantes del
modelamiento con drone eBee.....................................................................................58
Ilustración 47: Planimetría Humedal Chocontá.............................................................58
Ilustración 48: Porcentaje de cobertura de imágenes...................................................60
Ilustración 49: Superficie del vaso del agua……………………………………………….61
Ilustración 50: Modelo de curvas de nivel Batimétrico y Modelo
unificado de curvas de nivel………………………………………………………………...62
Índice de Tablas
Tabla 1: Parámetros de Vuelo .................................................................................... 35 Tabla 2: Sistema de Grilla .......................................................................................... 39 Tabla 3: Características del Postflight Terra 3D ......................................................... 47 Tabla 4: Listado de coordenadas puntos de control PC en Soacha
Humedal La Herrera ................................................................................................... 50 Tabla 5: Listado de coordenadas puntos de control PC en Bojacá
Humedal Santa Bárbara ............................................................................................. 50 Tabla 6: Listado de coordenadas puntos de control PC en Chocontá
Humedal Chocontá ..................................................................................................... 51 Tabla 7: Listado de coordenadas puntos de control PC en Machetá
Humedal La Petaca .................................................................................................... 51 Tabla 8 : Traslapo contractual y ejecutado ................................................................. 59 Tabla 9: Parámetros para el traslado de coordenadas ............................................... 61 Tabla 10: RMS Hz, Vert y PDOP de los vertices trasladados ..................................... 61

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
7
Introducción
La Corporación Autónoma Regional (CAR), es el ente encargado de velar por la
protección y conservación de los Humedales de Cundinamarca, es por ello que se
crea la necesidad de identificar el estado actual de algunos humedales ubicados
dentro del Departamento de Cundinamarca. Para la evaluación de los humedales
fue necesario explorar y reconocer los elementos Bióticos, Abióticos y el entorno
social que conforma cada cuerpo de agua.
Dentro de la evaluación de los humedales, se realizaron diversos procedimientos
batimétricos que permitieron obtener el modelo de curvas de nivel para la superficie
terrestre existente bajo la lámina de agua; con esta información se generó un
modelamiento hidráulico que permitió determinar la cota máxima de inundación del
cuerpo de agua.
La finalidad del presente proyecto es mostrar como la combinación de varias
técnicas de levantamientos topográficos y batimétricos, permitieron la creación de
un modelo de curvas de nivel de un determinado terreno.
Dentro de los procesos batimétricos se implementó el sistema de posicionamiento
en tiempo real (RTK), alternado con un equipo de ecosonda; para la obtención del
modelo digital de terreno, la planimetría y el orto mosaico georreferenciada se hizo
necesario la ejecución de vuelos con DRON.
La combinación de las diferentes metodologías permitió la creación de un modelo
único de curvas de nivel para cada humedal.
A lo largo del documento se evidencia como se incorporan las nuevas tecnologías
DRON en los procesos topográficos tradicionales y como la unificación de estos
procesos da como resultado final un solo modelo de curvas de nivel para cada
cuerpo de agua, el cual cumple con la precisión requerida.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
8
1. Capitulo: descripción del proyecto
1.1 Planteamiento del problema
Los humedales son sistemas cambiantes y dinámicos que se encuentran expuestos
a diversos factores del medio natural y también por intervenciones del hombre.
Las personas son quienes hacen los mayores aportes negativos a los procesos
naturales de cada humedal, tanto los vecinos del humedal como las personas que
viven lejos de ellos, generan impactos negativos debido a la poca o nula educación
ambiental que se tiene sobre estos ecosistemas.
La problemática que se presenta con los humedales está relaciona con el uso del
suelo que le proporcionan las personas vecinas al cuerpo de agua. Actividades
como ganadería, agricultura, urbanización, industrias y floricultura han
desencadenado problemas de contaminación, disminución del vaso de agua,
terrificación e invasión de la zona de ronda del humedal.
La expansión urbana es un tema que aqueja a los humedales de una manera
directa, al no contar con terrenos libres en los cuales se puedan plantear proyectos
de constructivos, se recurre al proceso de relleno de cuerpos de agua para construir
sobre ellos.
Algunas de las consecuencias de los problemas mencionados anteriormente son:
Sedimentación, desecación, eutrofización, contaminación, pérdida de biodiversidad,
alteración del régimen hidrológico entre muchos otros factores que aquejan a los
humedales de Cundinamarca.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
9
1.2 Justificación
Los humedales son ecosistemas que se encuentran en un aparente estado de
abandono y deterioro que conlleva a la degradación y posteriormente desaparición
de los mismos, prestando los humedales un servicio eco-sistémico vital.
Una de las funciones de los humedales es recoger el agua proveniente de las
lluvias, en periodos invernales funcionan como reguladores de agua, de tal forma
que ayudan a prevenir inundaciones; también son hábitat de diversas especies.
En la actualidad se ven muchos problemas de inundación de viviendas e incluso
inundación de barrios enteros, todo se debe a la ausencia de cuerpos de agua como
los humedales que cumplen la función de almacenar y retener aguas que provienen
de las lluvias.
Establecer la cota máxima de inundación de cada humedal por medio de batimetrias
y generar un ortomosaico georrefrenciado de la zona, permite realizar gran parte de
los estudios que se requieren para la recuperación delimitación y caracterización de
cada humedal.
La Corporación Autónoma Regional (CAR), emprende un proceso de recuperación
de humedales a través del proyecto “Delimitación, caracterización biofísica y
descripción del componente social de humedales identificados y priorizados en la
jurisdicción de la CAR incluyendo la determinación de la cota máxima de inundación
y su correspondiente área de protección”, con la finalidad de tenerlos como áreas
protegidas definiendo la delimitación e inclusión de cada uno, para consolidar la
actualización a través de la gestión ambiental.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
10
1.3 Objetivos
1.1.1 Objetivo General
Delimitar, caracterizar y determinar de la cota máxima de inundación y área de
protección de humedales en la jurisdicción de la CAR1.
1.1.2 Objetivos Específicos
Implementar la adquisición de información cartográfica, por medio de
tecnologías de aeronaves tripuladas remotamente.
Fusionar tecnologías DRONE con técnicas de RTK y ECOSONDA
Realizar la producción cartográfica de cada humedal incluyendo la
Batimetría, Altimetría, Mosaicos geo-referenciados y la planimetría de cada
humedal.
1 Corporación Autónoma Regional

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
11
2. Capitulo: Estructuración del proyecto
2.1 Marco teórico
2.1.1 Localización
Los municipios de Chocontà, Bojacá, Mosquera, Funza y Machetá; son municipios
que se encuentran ubicados dentro del Departamento de
Cundinamarca (Colombia); en los municipios en mención se llevó a cabo el
levantamiento topográfico y batimétrico en los humedales respectivos, por ello es
importante mencionar la localización geográfica de cada uno para conocer la
incidencia sobre cada humedal.
Municipio de Chocontá:
Se encuentra ubicado en la provincia de Almeidas, de la que es capital. La cabecera
municipal se encuentra a los 5° 09’ en Latitud y -73° 42’ en Longitud, con una altura
MSNM de 2689 y presenta una temperatura anual promedio de 13°C.
Limita con los municipios de Lenguazaque y Villapinzon por el costado Norte, con
el municipio de Suesca por el Occidente, con los municipios de Sesquile y Machetá
por el costado Sur y con los municipios de Villapinzón, Tibirita y Machetá por el
costado de Oriente.
El municipio de Chocontá cuenta con área de extensión territorial de 301.1 Km2,
donde el 0.48% de ésta es urbana y corresponde a 1.44 Km2 y el 99.52% de área
restante es rural cubre 299.66 Km2; este municipio se encuentra a 75 Km
aproximadamente de Bogotá.
Municipio de Mosquera:
El municipio de Mosquera limita al Norte con los municipios de Madrid y Funza, al
Oriente con la Ciudad de Bogotá, por el costado Sur limita con el municipio de

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
12
Soacha y por el Occidente con los municipios de Bajaca y San Antonio del
Tequendama.
Tiene una extensión de 107 Km2, el clima alcanza una temperatura de 13°C y se
encuentra a una atura de 2516 MSNM.
Municipio de Machetá:
El municipio de Machetá limita por el Norte con el Municipio de Choconta, por el Sur
con los Municipios de Guatavita y Gacheta, por el Oriente limita con los Municipios
de Tibirita y Manta, por el Occidente limita con los Municipios de Chocontá y
Sesquilé.
Tiene una extensión de 229.35 Km2, donde 5.35 Km2 corresponde a área urbana y
224 Km2 a área rural; se encuentra a 2094 MSNM y presenta una temperatura
promedio de 18°C.
Municipio de Funza:
El Municipio de Funza limita por el Norte con los Municipios de Madrid y Tenjo, por
el costado Oriental limita con el Municipios de Cotá y la ciudad de Bogotá, por el
Sur con el Municipio de Mosquera y por el occidente con el Municipio de Madrid.
Tiene una altitud de 2548 MSNM y una temperatura de 14°C, cuenta con una
extensión total de 70 Km2.
Municipio de Bojaca:
El Municipio de Bojaca se encuentra ubicado a 40 Km de la Ciudad de Bogotá, en
la provincia denominada Sabana de occidente, éste municipio limita por el Norte con
los Municipios de Zipacon, Facatativá y Madrid, por el costado Este limita con los
Municipios de Madrid y Mosquera, por el Sur limita con los Municipios de San
Antonio del Tequendama y Soacha y finalmente por el costado Oeste limita con los
Municipios de Zipacon, Tena y La Mesa.
El municipio tiene una extensión total de 109 Km2, presenta una altura de 2598
MSNM y una temperatura de 14°C.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
13
Ilustración 1: Diagrama de Localización Fuente propia 2017
Ilustración 2: Localización de Humedales La herrera y Santa Bárbara Fuente propia 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
14
Ilustración 3: Localización de Humedales Chocontá y Pantano Largo Fuente propia 2017
2.1.2 Humedales
2.1.3 Definición de Humedales
El termino humedal se refiere a ecosistemas húmedos tales como pantanos,
ciénagas, lagos, lagunas y áreas similares. Son terrenos saturados con agua que
combinan las características de ecosistemas terrestres y acuáticos, relacionados
biológicamente a la presencia de fauna y flora con el medio acuático.
Los elementos más importantes de los humedales son el agua, el suelo o sustrato,
y las comunidades biológicas, siendo el agua el principal elemento que controla la
vida vegetal y animal relacionada con el ecosistema.
2.1.4 Importancia De Los Humedales
Los humedales cumplen un rol muy importante debido a su biodiversidad, ayuda al
control de inundaciones, regula el clima, provee vida a la fauna y la flora mediante
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
15
el recurso hídrico. A su vez tiene un importante valor social, ya que permiten el
desarrollo de culturas a su alrededor, la comunicación de especies migratorias y el
desarrollo de actividades de esparcimiento.
Los beneficios de los humedales comprenden una gran variedad de bienes,
servicios, usos y funciones de valor para la sociedad, la flora y la fauna silvestre,
como procesos naturales.
Proveer agua para usos doméstico, agrícola e industrial.
Protección contra inundaciones.
Sumideros de carbono.
Recargan acuíferos y estabilizan el microclima.
Filtrar sedimentos, nutrientes y toxicos.
Proveen productos naturales de origen animal o vegetal.
Proporcionan espacios para el turismo y recreación.
Sirven de habitad para la vida silvestre.
2.1.5 Humedales por Origen
Para efectos de la gestión sobre los ecosistemas de humedal, en principio se debe
distinguir entre humedales naturales y artificiales.
Humedales Naturales
Son ecosistemas de gran valor ecológico y cultural, constituidos por un cuerpo de
agua permanente durante el año o estacional de acuerdo a las temporadas de lluvia,
de escasa profundidad, una franja a su alrededor que puede cubrirse por
inundaciones periódicas (ronda hidráulica) y una franja de terreno no inundable,
llamada zona de manejo y preservación ambiental. Regulan y amortiguan las
corrientes de agua, a su vez actúan como sitios de paso de aves migratorias y es
habitad de algunas especies endémicas.
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
16
Humedales Artificiales
Son una técnica creada como consecuencia de la influencia humana directa,
diseñada para limitar los procesos que ocurren en los humedales naturales, donde
se utilizan plantas y suelos nativos y sus microorganismos asociados, para mejorar
la calidad del agua y proveer un beneficio ambiental y social. Los humedales
artificiales tienen la ventaja de comportarse como naturales y además se pueden
controlar aspectos hidráulicos y biológicos tales como el flujo de agua y la
vegetación a utilizar.
2.2 Definición de levantamiento topográfico
Se define como un grupo de operaciones que se ejecutan sobre un terreno con los
instrumentos y materiales adecuados para poder crear una correcta representación
gráfica del terreno.
El levantamiento topográfico se fundamenta en la realización y representación
matemática de un lugar, en sí, es una actividad que permite realizar la descripción
de un terreno y sus elementos a través puntos, líneas y polígonos organizados de
manera lógica en un plano. Para un adecuado levantamiento topográfico, un
topógrafo debe realizar la abstracción de una superficie terrestre, incluyendo las
características morfológicas de esa superficie tales como ríos, lagos, reservorios,
caminos, bosques o formaciones rocosas así como los detalles construidos por
hombre como tanques, represas, diques, canales, construcciones, vías, cercas
entre otros.
Una vez se obtienen los datos que se tomaron en campo, se trazan los mapas o
planos en los cuales se reconstruye la planimetría del terreno, también se describen
las diferencias de altura de los relieves tales como valles, llanuras, colinas,
pendientes o de los elementos relevantes que se encuentran en el lugar donde se
realiza el levantamiento.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
17
Ilustración 4: Mediciones topográficas y su representación en un plano
Fuente SAR INGENIERIA, 2017
El primer objetivo de un levantamiento topográfico es establecer una posición de un
punto o un grupo de puntos sobre un plano horizontal. Para ello, se realiza la
medición de las distancias horizontales y la lectura de los ángulos horizontales, a lo
cual se le conoce como planimetría. El segundo objetivo es conocer el valor de
elevación o la altura vertical de uno o más puntos en relación a un plano horizontal
definido. Para esto, se miden las distancias horizontales y las diferencias de altura;
que permiten trazar curvas de nivel todo ello se puede ver en la ilustración 4.
El levantamiento topográfico es el proceso fundamental y punto de referencia que
se toma para poder realizar todas las etapas concernientes con la identificación y
señalamiento del terreno; existen diferentes tipos y metodologías de levantamientos
topográficos, emplear cada técnica depende de las condiciones y la extensión del
terreno.
2.3 Métodos de levantamiento topográfico convencional
Son aquellos que se realizan empleando instrumentos electrónicos de medición de
ángulos y distancias; en esencia estaciones topográficas totales. Este método
prevalece a pesar de los avances tecnológicos que han permitido tener plataformas
mucho más rápidas y precisas, en virtud que pueden ser empleados casi en
cualquier lugar y bajo cualquier circunstancia topográfica y climática.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
18
Radiación de Detalles: Es la toma de información de los puntos de terreno, detalles
planimétricos y altimétricos mediante el método de radiación sencilla desde los
deltas o puntos posicionados. Se levanta una nube de puntos equidistantes entre 5
y 10 metros dependiendo de las características del terreno, complementando
además esta nube de puntos con las líneas de quiebre del terreno necesarias para
la generación del modelo digital. De igual forma cada punto leído debe llevar una
numeración consecutiva y un código predefinido que lo identifica y es registrado en
la memoria del equipo.
Las radiaciones son mediciones de ángulos y distancias que se realizan por medio
de un barrido horizontal hacia determinados puntos de interés en el terreno,
básicamente se realizan desde el extremo de una línea de referencia; este método
requiere buena visibilidad desde el punto de estacionamiento hacia cada uno de los
diferentes detalles a capturar, se debe tener en cuenta el alcance del equipo, para
no exceder la distancia de lectura permitida o propicia, con la finalidad de no perder
precisión en la toma de datos.
Ilustración 5: Radiación de detalles con equipo convencional
Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
19
2.4 Levantamientos por métodos de posicionamiento global (GPS – GNSS).
El sistema de Posicionamiento Global (GPS) es un sistema de satélites usado en
navegación que permite determinar la posición de un punto, en cualquier lugar del
globo y en cualquier condición climatológica.
El receptor GPS obtiene su posición midiendo la distancia a varios satélites, los
cuales actúan como puntos fijos de referencia en el espacio, y triangulando. Para
ello es necesario que no existan obstáculos entre los satélites y el receptor, ya que,
a diferencia de la radio, la televisión, la telefonía y otras transmisiones de radio,
debe existir una línea de visión directa desde el GPS a los satélites.
Se adquiere la información por medio de equipos satelitales los cuales tienen antena
GPS-GNSS y en algunos casos, un radio de comunicación de onda corta que facilita
la trasmisión de las correcciones diferenciales desde un GPS-GNSS instalado en
un vértice con coordenadas fijas a otro que realiza la toma de los puntos de interés.
Estos levantamientos se llevan a cabo aplicando técnicas denominadas
diferenciales; es decir, se mide las diferencias de coordenadas (línea base) desde
un punto fijo (estación de referencia) hasta un punto desconocido (estación móvil).
SPS Navegación
POSICIONAMIENTO ABSOLUTO
POSICIONAMIENTO GPS-GNSS DGPS-GNSS Correcciones recibidas.
POSPROCESO Estático Estático Rápido
POSICIONAMIENTO RELATIVO Cinemático Stop And Go
RTK
Ilustración 6: Opciones para Posicionamiento GPS-GNSS Fuente propia, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
20
De acuerdo con el procesamiento de la información GPS-GNSS recibida, se pueden
considerar tres metodologías de trabajo:
Posicionamiento Absoluto: Los datos recibidos del GPS-GNSS se promedian
época tras época sin ninguna corrección.
Posicionamiento Post procesado: se graban los datos GPS-GNSS crudos de
los satélites y se procesan mediante un software en oficina, denominado
posicionamiento relativo.
Posicionamiento en Tiempo Real: El procesamiento de datos se lleva a cabo
en el momento de la medición, obteniendo una posición instantánea y
precisa.
2.4.1 Métodos de observación GPS
El GPS es una herramienta que permite establecer distintos métodos de
observación, de acuerdo a la instrumentación, a la exigencia de precisión y temporal
del trabajo y a la técnica de proceso de los observables. Por ello establecer una
clasificación es solo ordenar bajo algún criterio estas condiciones previas.
Los métodos de posicionamiento GPS-GNSS son los siguientes:
Estático
Ilustración 7: Red de Apoyo - Levantamiento estático Fuente SAR INGENIERIA, 2017
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
21
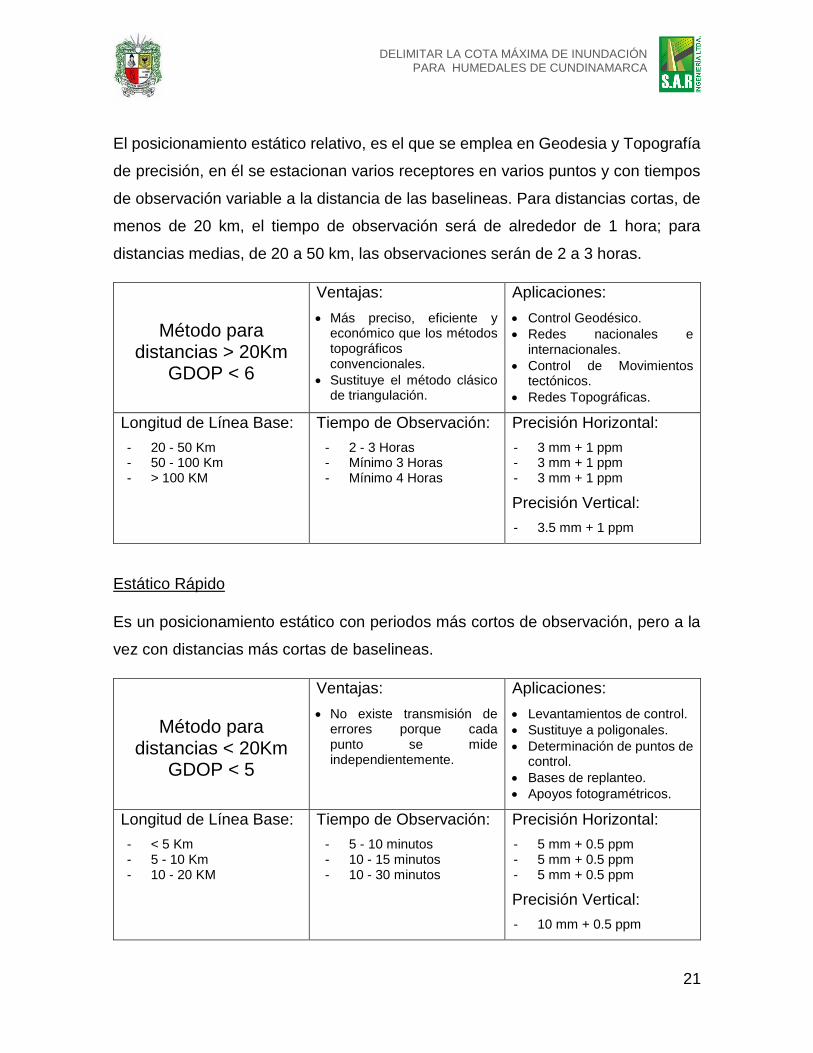
El posicionamiento estático relativo, es el que se emplea en Geodesia y Topografía
de precisión, en él se estacionan varios receptores en varios puntos y con tiempos
de observación variable a la distancia de las baselineas. Para distancias cortas, de
menos de 20 km, el tiempo de observación será de alrededor de 1 hora; para
distancias medias, de 20 a 50 km, las observaciones serán de 2 a 3 horas.
Método para
distancias > 20Km GDOP < 6
Ventajas:
Más preciso, eficiente y económico que los métodos topográficos convencionales.
Sustituye el método clásico de triangulación.
Aplicaciones:
Control Geodésico.
Redes nacionales e internacionales.
Control de Movimientos tectónicos.
Redes Topográficas.
Longitud de Línea Base:
- 20 - 50 Km - 50 - 100 Km - > 100 KM
Tiempo de Observación:
- 2 - 3 Horas - Mínimo 3 Horas - Mínimo 4 Horas
Precisión Horizontal:
- 3 mm + 1 ppm - 3 mm + 1 ppm - 3 mm + 1 ppm
Precisión Vertical:
- 3.5 mm + 1 ppm
Estático Rápido
Es un posicionamiento estático con periodos más cortos de observación, pero a la
vez con distancias más cortas de baselineas.
Método para
distancias < 20Km GDOP < 5
Ventajas:
No existe transmisión de errores porque cada punto se mide independientemente.
Aplicaciones:
Levantamientos de control.
Sustituye a poligonales.
Determinación de puntos de control.
Bases de replanteo.
Apoyos fotogramétricos.
Longitud de Línea Base:
- < 5 Km - 5 - 10 Km - 10 - 20 KM
Tiempo de Observación:
- 5 - 10 minutos - 10 - 15 minutos - 10 - 30 minutos
Precisión Horizontal:
- 5 mm + 0.5 ppm - 5 mm + 0.5 ppm - 5 mm + 0.5 ppm
Precisión Vertical:
- 10 mm + 0.5 ppm

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
22
Cinemático
Es el método fundamental para navegación o elementos en movimiento. Requiere
de un proceso de inicialización para determinar las ambigüedades, y mantener
continuamente estas resueltas. El desarrollo de los algoritmos de determinación de
ambigüedades en movimiento OTF ha permitido este método. Se trabaja con al
menos dos receptores, una estación de referencia y un elemento móvil, y se apoya
su resolución en mantener continuamente la ambigüedad resuelta, si se pierde ésta,
hay que reinicializar el proceso.
Ilustración 8: Mediciones cinemáticas con GPS Fuente SAR INGENIERIA, 2017
Estación de referencia temporal:
rastrea continuamente
GDOP < 5
Ventajas:
Mediciones continuas rápidas y económicas.
Debe mantenerse en contacto con 3 satélites como mínimo.
Desventajas:
En caso de pérdida de la señal de los satélites, se ha de volver a inicializar.
Solo se puede usar en zonas despejadas.
Aplicaciones:
Determinación de la trayectoria de objetos en movimiento.
Levantamientos de ejes de carreteras y ferrocarriles.
Medicion de perfiles transversales.
Levantamientos hidrográficos y batimétricos.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
23
Cinemático RTK
El método diferencial se apoya en la utilización de dos equipos GNSS
simultáneamente en dos posiciones diferentes, siendo una de ellas conocida, y al
posicionamiento de este receptor se le llama estación de referencia y al otro móvil
o rover. Con este método se consigue cifrar y cuantificar algunos errores propios
del sistema GNSS que afectan al modo absoluto, y se pueden corregir en tiempo
real.
El GPS diferencial opera mediante la eliminación o mitigación de la mayoría de los
errores que se infiltran en las mediciones u observaciones GNSS.
El receptor estación o fijo se sitúa en un lugar cuya posición se conoce con exactitud.
Este receptor calcula su posición a partir de los datos del satélite y luego las
compara con las conocidas, la diferencia es el error previsible en la señal GPS. Si
el otro receptor (móvil) está a una distancia de manera que las trayectorias desde
el satélite al receptor recorran situaciones atmosféricas similares se supone que los
retardos serán idénticos, así algunos errores se podrán por tanto anular o mitigar al
trabajar con la información de la estación fija. Un factor importante es el lapso de
tiempo que lleva el cálculo de las correcciones y el tiempo de llegar dichas
correcciones al receptor móvil. Este lapso se denomina periodo de latencia del
receptor.
Fijación de ambigüedades en un
radio < 10 Km
Ventajas:
Actualización de coordenadas en un tiempo de 1 a 2 segundos.
.Trabajar a grandes distancias.
Más rápido que un levantamiento con Estación Total.
Salida de datos WGS 84 (X, Y, Z) o Datum local más control de calidad.
Aplicaciones:
Básico en topografía de obras de levantamientos topográficos.
Longitud de Línea Base:
- < 30 Km
Tiempo de Observación:
- 1 - 2 segundos
Precisión Horizontal:
- 10 mm + 1 ppm RMS
Precisión Vertical:
- 15 mm + 1 ppm

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
24
La corrección diferencial en tiempo real puede hacerse a partir de observable de
código o de observable fase, habitualmente a la corrección diferencial de código se
le denomina GPS diferencial DGPS, DGNSS y se reserva el termino de corrección
cinemático en tiempo real RTK a la corrección en fase, y dentro del concepto RTK,
se suele distinguir entre solución RTK convencional y estación única o de solución
red RTK. (Ver Ilustración 99)
Ilustración 9: Método tiempo real (RTK); Fuente SAR INGENIERIA, 2017
Stop and Go
El método emplea un GPS de referencia fijo en modo estático en un punto conocido
y uno o más receptores móviles. Se realiza una inicialización en método estático
durante 10 minutos. La radiación de los puntos del levantamiento demanda mínimo
2 o 3 épocas y 5 minutos si son puntos auxiliares. La precisión emc 1 a 2 cm +
1ppm.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
25
Ilustración 10: Mediciones por el método GPS stop and go Fuente SAR INGENIERIA, 2017
2.5 Batimetría
Etimológicamente, el termino Batimetría significa “el arte de medir las
profundidades”.
La Batimetría se puede definir como el conjunto de procesos que se emplean para
determinar una superficie que se encuentra cubierta por agua, de esta manera se
establecen las características del terreno que se encuentra al interior de cualquier
cuerpo de agua.
Las Batimetrías se emplean en Ríos, Humedales, Lagos, Océanos, Puertos y
demás superficies que se encuentren cubiertas por agua, también se puede denotar
como la Cartografía del terreno que se encuentra bajo el agua.
Al igual que en la topografía convencional, la Batimetría muestra las variaciones de
relieve que se encuentran según el terreno, lo que se conoce también como curvas
de nivel.
Lo modelos digitales de terreno o modelos de curvas de nivel se emplean para
realizar estudios o modelamientos hidráulicos. Con ello se determinan los niveles

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
26
de inundación, velocidades y profundidades de flujo, otro aspecto es la
determinación de la faja de inundación así como la zonificación de la amenaza por
inundación en función de la lámina de agua y la velocidad de flujo.
2.5.1 Métodos Batimétricos
Inicialmente la Batimetría se realizaba con una piedra atada a una cuerda, esta se
lanzaba al agua en posición vertical, la distancia que alcanzaba la cuerda desde el
fondo hasta tocar la lámina de agua se tomaba como profundidad, esta metodóloga
era empleada por los egipcios.
Hoy día, la tecnología ha permitido mejorar los proceso y optimizar los tiempos de
ejecución, gracias a la implementación de los GPS y de algunas otras herramientas
realizar una batimetría en la actualidad es más sencillo. En el medio se puede
encontrar diversas maneras de realizar batimetría entre ellas se tiene:
Batimetría con método convencional
En la aplicación de esta metodóloga se puede remitir al ítem (2.3 Métodos de
levantamiento topográfico convencional), de este documento donde se explica el
procedimiento.
Batimetría Fotogramétrica
Se debe emplear en aguas de poca profundidad, de ellas se obtiene un error muy
pequeño. Lleva implícito la aplicación de una serie de correcciones entre ellas:
Mareas, salinidad, temperatura del agua, índice de refracción de agua, entre otros.
Batimetría Por Procedimientos Fotográficos
También se debe emplear en agua poco profundas. Estudia la variación del espectro
visible a partir de imágenes en diversas condiciones desde aeroplanos, del análisis

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
27
de las fotografías, se saca un promedio donde se establece las características
estables del fondo.
Batimetría mediante Laser (sonar lateral)
Este funciona como un radar. Emite unas señales acústicas que rebotan en el fondo
de la superficie y en cada uno de los objetos depositados en el fondo del cuerpo de
agua creando una imagen, funciona con ultrasonidos en lugar de ondas
electromagnéticas.
También conocido como sonar acústico, el sonar muestra únicamente ecos de los
objetos reflejados por el sonido hacia el transductor del sonar. Algunos materiales
como la arcilla o sedimentos finos depositados en el fondo del cuerpo de agua, no
reflejan muy bien el sonido a diferencia de metales o rocas.
Batimetría con Satélites de Teledetección
Con el uso de satélites como: LANSAT (MSS), SPOT, GEOSAT o RADARSAT, en
mares de poca profundidad se ha logrado establecer la variación, por medio de las
distintas bandas del espectro.
2.6 Sistemas Aéreos No Tripulados
Una herramienta básica para elaborar la cartografía es la fotogrametría. Esta
permite medir sobre fotografías con las que se puede determinar las propiedades
geométricas de los objetos y las situaciones espaciales a partir de imágenes
fotográficas. Si se trabaja con una foto se puede obtener información en primera
instancia de la geometría del objeto, es decir, información bidimensional. Si se
trabaja con dos fotos, en la zona común a éstas (zona de solape), se podrá tener
visión estereoscópica, o dicho de otro modo, información tridimensional.
Básicamente, es una técnica de medición de coordenadas 3d, que utiliza fotografías
u otros sistemas de percepción remota junto con puntos de referencia topográficos
sobre el terreno, como medio fundamental para la medición. (Rejano, 2015)

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
28
Las nuevas herramientas tecnológicas permiten obtener datos con una resolución
temporal reducida y con una alta resolución espacial, tanto de fotografías como de
puntos. El proceso de obtención de los datos pasa a ser desde el proceso de
imágenes planas 2d a imágenes en 3d. Para ello se utiliza la técnica de la
estereoscopía. (Alvarez, 2014.)
Las imágenes tomadas desde un Drone son sub ortogonales, ya que rara vez son
totalmente ortogonales, y de hecho no es necesario que lo sean, ni tampoco se
busca como objetivo. La precisión de los GPS de abordo son de varios metros
(incluso 10 - 20 m), por lo que las precisiones de centímetros del trabajo final han
de obtenerse mediante puntos de control en el terreno. Estos puntos de control
deben de repartirse homogéneamente sobre el territorio objeto de estudio, para
obtener el mínimo error posible, además de realizar un reconocimiento del terreno
para identificar las formas y elementos característicos del territorio. (Alvarez, 2014.)
La elección de la escala es fundamental. La escala apropiada será la que permita
ver todos los elementos deseados claramente. Aun así, a la hora de realizar el vuelo,
la altura del dispositivo no debe de ser muy elevada, siendo siempre por debajo de
los 120 m para poder operar dentro del margen de la legalidad conforme a la
normativa en vigor en Colombia para el uso de Drone. Dependiendo de los objetivos
que se quieran alcanzar, la captura de fotografías puede ser desde cámaras
digitales convencionales, con una focal fija o una cámara multiespectral que capte
la radiación en otras bandas del espectro electromagnético. Todas deben de cumplir
con una calibración de fábrica que por cuestiones de humedad y temperatura
pueden variar. (Rejano, 2015)
Otro punto importante en la toma de datos son las condiciones atmosféricas, las
cuales afectan en gran medida ya que puede provocar errores en la captación de
los datos. Por ello es fundamental la formación de los pilotos de Drone y en los
manuales de los operadores de Drone disponer de procedimientos de vuelo
condicionados a la meteorología. Es necesario recordar que los Drone son equipos
de unos pocos kg de peso que son muy vulnerables a los vientos y condiciones
meteorológicas. Una climatología adversa aparte de poder provocar un fallo de
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
29
seguridad en el vuelo con consecuencias poco predecibles, puede provocar
cambios de posición de la Drone pudiendo variar la posición de disparo de la
fotografía que podría alterar el resultado llegando a hacerlo técnicamente incorrecto.
Es importante a la hora de realizar el vuelo, seguir las indicaciones del manual del
operador donde se indican las calibraciones y comprobaciones necesarias de todos
los sistemas, con el fin de minimizar los errores y asegurar la calidad de los
resultados. (Rejano, 2015)
Algunos de los errores intrínsecos de la tecnología de uso de los Drone en
aplicaciones cartográficas solamente pueden ser corregidos mediante el uso de
puntos de control en tierra, de coordenadas conocidas. Algunos de estos puntos se
utilizan para calibración, y otros para comprobación de resultados. (Rejano, 2015)
2.6.1 Levantamiento mediante Drone eBee
Los Drones son elementos tecnológicos que han revolucionado diversos campos.
En la topografía ha permitido optimizar tiempos en los levantamientos y realizar una
inspección del estado actual del terreno.
El eBee de manera autónoma, despega, vuela y aterriza. Gracias a la inteligencia
artificial que emplean estos dispositivos realiza todas las operaciones por medio de
un Piloto Automático, el cual analiza de manera constante los datos de la Unidad de
Medición Inercial o (IMU) y el GPS interno se encarga del esquema planteado en la
misión de vuelo. Contiene un sensor de tierra, compuesto por un sensor de alta
velocidad junto con un lente, que permiten establecer con altísima precisión la
distancia al suelo. Basados en el GPS que contiene el drone y gracias a esa
precisión se logra un aterrizaje suave y lineal dentro de una gran variedad de
posibles terrenos, siendo un aterrizaje toralmente autónomo.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
30
Para la elaboración de un vuelo es indispensable realizar algunas actividades
previas que garanticen la efectividad de la operación, a continuación se mencionan
las actividades fundamentales a tener en cuanta:
Planeación
Ilustración 11: Diseño 3D - planeación de vuelo Fuente SAR INGENIERIA, 2017
Se debe establecer el área de vuelo, ello se hace sobre una plataforma que trabaja
con la imagen de Google Earth como base, se deben definir parámetros como:
Altura de vuelo, valor de traslapo de imágenes, temperatura promedio, condiciones
meteorológicas, con ello sale un esquema de vuelo en 3D donde se identifica la
duración del mismo y se establece si se requiere de uno o más vuelos.
Parámetros
Los parámetros permiten establecer los valores promedio que se pueden presentar
en la ejecución del vuelo

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
31
Ilustración 12: Parámetros de diseño de vuelo Fuente SAR INGENIERIA, 2017
Simulación
La simulación permite realizar la misión de manera virtual, implementando todas las
condiciones propuestas en la primera parte de la planeación donde tiene en cuenta
fuerza y dirección de viento. Permite incorporar mejoras o realizar cambios para la
realización del vuelo, luego de ello se guarda para ejecutarlo en campo.
Ilustración 13: Planeación y Simulación de Vuelos Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
32
Monitoreo
Es una actividad fundamental que se desarrolla en campo. Durante el vuelo se
monitorean los parámetros de vuelo y la configuración previa, el nivel de batería y
la toma de fotografías en tiempo real, el equipo emite mensajes y estados de
advertencia que permiten controlar el vuelo.
Control
El Drone eBee, permite si es necesario actualizar o reprogramar el vuelo diseñado,
también se puede modificar la ubicación de aterrizaje según las condiciones de
campo mientras se encuentra en movimiento recibe comandos específicos para que
pueda ejecutar las acciones específicas que se le asignen.
Una vez terminado el vuelo, se realiza un proceso de geo etiquetado a las imágenes
capturas.
Ilustración 14; Control y planeación intuitiva del vuelo a través del software eMotion 2 Fuente SAR INGENIERIA 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
33
2.7 Postfly terra 3D
Es un programa que permite el procesamiento de imágenes capturadas con Drone,
específicamente las imágenes capturadas con el eBee. Por medio de tres procesos
fundamentales se logra el resultado esperado.
a. Georreferenciación del modelo
b. Generación de nube de puntos
c. Generación de curvas de nivel o MDT
Con este programa y con un buen trabajo realizado en campo se logran precisiones
de hasta 1cm en planimetría.
2.8 Marco Legal
En Colombia la reglamentación del uso de los Drones está regida por la CIRCULAR
REGLAMENTARIA Nº 002 de la Aeronáutica Civil la cual tiene como propósito
ampliar la información e impartir instrucciones de cumplimiento en referencia a los
requisitos de Aeronavegabilidad y Operaciones necesarios para obtener permiso de
acuerdo a lo establecido en el numeral 4.25.8.2 de los Reglamentos Aeronáuticos
de Colombia (RAC), en lo relacionado con la realización de operaciones de
Sistemas de aeronaves pilotadas a distancia - RPAS diferentes a las de recreación
y deporte. (Civil, 2015).
Actualmente se cuenta con la circular Informativa N° 003, emitida también por la
Aeronáutica Civil, donde establecen los parámetros y requisitos con los que debe
cumplir aquella persona que desee tener una preparación como Técnico en
Mantenimiento.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
34
3. Metodología
3.1 Flujo de trabajo
Ilustración 15: Flujo de trabajo Fuente propia, 2017
3.2 Materiales
Los materiales empleados para el desarrollo del trabajo fueron:
KMZ de cada uno de los humedales intervenidos
Drone - ebee
GPS doble frecuencia
Ecosonda
Equipo menor (Bipodes, bastones, radios, otros)
Elementos de taquera (Pintura, Estacas, Maso, Machete)
Computador portátil y de escritorio
Carro y bote.
Software (AutoCAD Civil 3D, Arcmap, Emotion, Google Earth, Microsoft
Office, Trimble Business, Pix4D)

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
35
3.3 Vuelo Fotogramétrico
3.3.1 Trabajo en oficina
Para la planeación de los vuelos, se usó el polígono o área de interés indicada en
el archivo kml de delimitación e identificación de los humedales. El polígono incluye
el buffer de 100 metros, con este se organizaron los vuelos necesarios para cubrir
el área total del humedal.
ITEM
Tamaño de Pixel 5 cm
Altura de vuelo sobre el terreno 150 m
Traslapo Longitudinal 75%
Traslapo Transversal 80%
Tabla 1: Parámetros de Vuelo Fuente Propia, 2017
De acuerdo a la extensión y características del terreno de cada humedal, se generan
los vuelos necesarios para abarcar el área establecida contractualmente, como se
aprecia en la ilustración 16.
Ilustración 16: Diseño de vuelo Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
36
Las líneas de vuelo deben ser paralelas a la dirección de las curvas de nivel; esto
permite conservar el tamaño del pixel en toda el área del vuelo; es así como se
generó la totalidad de planes de vuelo, para cada polígono. En la ilustración 17 se
aprecia la distribución de líneas de vuelo para un área en un sector trabajado.
Ilustración 17: Cambios de altura de las líneas de vuelos proyectadas en el terreno
Fuente SAR INGENIERIA, 2017
Los vuelos definidos fueron planificados en el software eMotion con base en el grid
de google earth, con una altura media de vuelo de 150 metros según lo establecido
en el acuerdo No. 002 de la aeronáutica civil, dando como resultado un tamaño final
de pixel de 5 cm. Con el fin de garantizar la correlación de las fotografía en cada
modelo.
Ilustración 18: Control y planeación del vuelo a través del software eMotion 2 Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
37
3.3.1.1 Diseño de Puntos de Control (GCP)
Con base en el diseño de los vuelos, se estableció el control en tierra para cada uno
de los polígonos de interés. Con la malla de control definida, se garantiza la
precisión a lo largo de todo el terreno levantado.
Ilustración 19: Diseño de Puntos de Control Fuente SAR INGENIERIA, 2017
3.3.2 Trabajo en Campo
El trabajo de campo se inició con la exploración del humedal y las zonas aledañas
para identificar los sitios de posible lanzamiento y aterrizaje del drone, así como
verificar la concordancia de los vuelos planificados con las condiciones propias del
terreno.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
38
3.4 Georreferenciación
Para la georreferenciación del humedal, se realizó un traslado de coordenadas
desde las estaciones permanentes y pasivas de la red MAGNA ECO, hacia un punto
materializado, el cual se nombró de acuerdo a las especificaciones contractuales,
ubicado en terrenos cercanos. El método empleado fue GPS estático diferencial,
con periodos de rastreo adecuados, basados en la distancia entre el humedal y los
vértices de la red MAGNA ECO.
Ilustración 20: Materialización y Posicionamiento Vértice Base Fuente SAR INGENIERIA, 2017.
3.4.1 Demarcación de los Puntos de Control (GCP)
De acuerdo al tipo de terreno y la localización de los diferentes humedales, los GCP
se demarcaron con pintura en terrenos secos y rígidos; plástico en terrenos
húmedos y áridos, generando contraste basados en las características del suelo.
De modo que estos pudieran ser foto identificados durante el procedimiento de
ajuste fotogramétrico. Estos apoyos garantizan la calidad de los trabajos, a través
de la correlación del grid fotogramétrico y la nube generada con las coordenadas
obtenidas del posicionamiento GPS. En la siguiente figura se aprecia las
características de las marcas usadas en campo.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
39
Ilustración 21: Demarcación y Posicionamiento de los GCP Fuente SAR INGENIERIA, 2017
3.4.2 Georreferenciación Puntos de Control (gcp)
El procedimiento de georreferenciación de los puntos de control pre señalizados,
fue llevado a cabo por personal idóneo y calificado. Para este fin se utilizaron
equipos GPS de doble frecuencia, empleando el punto materializado como base
para las determinaciones. El método empleado fue GPS Fast Static, con periodos
de observación de 15 minutos a cada punto de control PC.
El sistema de coordenadas empleado es Magna Sirgas Origen Central, el cual se
define a continuación:
Sistema de Grilla
Nombre: Colombia MAGNA
Tipo de Proyección: Transversa de Mercator
Nombre de la zona: MAGNA Bogotá
Meridiano Central = 074°04’39.02850’’W
Factor de escala = 1.000000 m
Latitud de la grilla de origen = 04°35’46.32150’’
Falso Este = 1000000.000 m
Falso Norte = 1000000.000 m
Tabla 2: Sistema de Grilla
Fuente propia, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
40
3.5 Ejecución de los vuelos con el Drone ebee
Antes de realizar el vuelo, se llevó a cabo la inspección del polígono de trabajo, con
el fin de elegir el área de lanzamiento y aterrizaje del drone. Se escogieron zonas
despejadas aledañas al cuerpo del humedal y adicionalmente se eligieron los sitios
donde se dispuso personal auxiliar encargado de vigilar la trayectoria del avión de
manera permanente, con el fin de garantizar la seguridad en la ejecución, tanto del
drone como de posibles afectaciones en caso de algún tipo de accidente por fallos
del avión o derribamiento.
En su gran mayoría los vuelos se realizaron hacia las 10 de la mañana, con el
propósito de minimizar sombras en las imágenes capturadas. Durante la evaluación
de los mismos se pudo evidenciar una perfecta resolución de las fotografías y un
gran contraste en cada una de las adyacentes.
Una vez terminada la trayectoria del Drone, se descargaron las fotografías y el
archivo de control de vuelo de eMotion .bbx, con el fin de realizar el geo etiquetado
de las fotografías y el control de calidad de las mismas. El geo etiquetado es la
anotación que tiene cada una de las fotografías tomadas, donde se escriben las
coordenadas geográficas del centro de proyección y los valores de las rotaciones
sobre cada eje (Phi, Kappa, Omega), este procedimiento es propio de los drone
eBee.
Con las imágenes revisadas, se generó un modelo de control de calidad verificando
el tamaño de pixel final para la correlación de imágenes y los traslapos (longitudinal
y transversal) entre fotografías consecutivas y adyacentes. Como resultado se pudo
corroborar que dichas variables correspondieron con lo planificado, como se puede
apreciar en la ilustración 22 de control de calidad.
Las zonas verdes presentan los mayores recubrimientos, las zonas rojas los
menores.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
41
Ilustración 22: Control de calidad de los traslapos Fuente SAR INGENIERIA, 2017
3.6 Criterios de levantamiento batimétrico
Para la ejecución de los levantamientos topográficos, se tomaron en cuenta criterios
que definieron el área a trabajar, con el fin de optimizar recursos de tiempo que
permiten tener los insumos necesarios para la interpretación de datos y modelación
en el ejercicio final de la delimitación. Los criterios que se tuvieron en cuenta se
describen a continuación:
Histórico de inundaciones (multitemporal)
Entrevistas a la comunidad de la zona aledaña al humedal, relacionada con
la actividad del ecosistema referente a las inundaciones percibidas
Condiciones morfológicas del terreno (pendientes fuertes)
Entradas y salidas del humedal
Infraestructura adyacente al humedal

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
42
3.7 Metodología Batimétrica empleada en los Humedales
Para la obtención de la profundidad del vaso de agua, se realizó mediante secciones
transversales con una separación aproximada de 20 metros, a través de
metodologías GPS en método RTK, fusionadas con la información capturada con
ecosonda en humedales profundos y/o bastones patronados con metro en
humedales superficiales.
En los humedales con junco y buchón se hizo uso de una maquina anfibio para
realizar las secciones transversales en el vaso del cuerpo de agua y con ayuda del
el equipo de GPS RTK se realizó la captura de los datos.
Ilustración 23: Batimetría con maquina anfibio Fuente SAR INGENIERIA, 2017
En humedales limpios de vegetación con solo presencia de lámina de agua, se hizo
uso de un bote con propulsión mecánica y/o manual, dependiendo la dimensión del
cuerpo de agua a intervenir

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
43
Ilustración 24: Batimetría con bote Fuente SAR INGENIERIA, 2017
Por ultimo en los humedales de poca profundidad se hizo el recorrido de las
secciones a pie y en algunos cuerpos de agua con trajes de fontanero
impermeables.
Ilustración 25: Batimetría con traje fontanero Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
44
3.8 Procesamiento de los Vertices de Apoyo
Terminadas las labores en campo, se realiza el post-proceso de la información GPS
capturada, haciendo el traslado de coordenadas desde las estaciones permanentes
de la red MAGNA-ECO del IGAC, hasta el punto materializado y a su vez a los puntos
de control PC que servirán como soporte a los ajustes fotogramétricos GCP.
El procesamiento se llevó a cabo en el software Trimble Business Center versión
3.50, en sistema de coordenadas MAGNA-SIRGAS; coordenadas planas de gauss
origen Bogotá, época 1995.4.
Ilustración 26: Importación de datos crudos para procesamiento Fuente SAR INGENIERIA, 2017
Una vez cargados todos los datos GPS del traslado hacia el punto materializado
como de los puntos de control GCP para el ajuste del modelo fotogramétrico, se
realiza el procesamiento de los vectores resultantes para obtener coordenadas en
época actual.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
45
Ilustración 27: Solución de ambigüedades
Fuente SAR INGENIERIA, 2017
Una vez obtenidas las posiciones absolutas de los puntos, con las coordenadas
geográficas se calculan las velocidades en el programa Magna Sirgas Pro3 con el
fin de obtener coordenadas ortogonales XYZ en la época 1995.4 y con base en
éstas, realizar la conversión a planas de gauss. Para el ajuste de elevaciones, se
empleó la metodología del IGAC para obtención de elevaciones con GPS, por el
método de perfil topográfico.
Ilustración 28: Obtención de velocidades, transformación de coordenadas y ajuste de elevaciones software Magna SirgasPro3
Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
46
3.9 Procesamiento del Levantamiento Batimétrico
Ya que las observaciones GPS RTK guardan durante la captura los valores Dx, Dy
y Dz de los puntos respecto de la base, así como las coordenadas finales obtenidas
para cada punto, el procesamiento de las mismas consiste en la estructuración de
los diversos archivos por sesión de trabajo en un proyecto por cada humedal en el
software Trimble Business Center.
Al finalizar el procesamiento en la oficina, se obtienen los listados de coordenadas
finales por cada humedal así como el reporte de derivación de puntos en el cual se
aprecian los valores de coordenadas del punto base, los diferenciales XYZ del rover
y las precisiones de las coordenadas para los puntos.
Ilustración 29: Recopilación de observaciones RTK
Fuente SAR INGENIERIA, 2017
3.10 Procesamiento Digital Postflight terra 3D-EB
Culminadas las labores en campo, las fotografías capturadas con el drone son
ajustadas fotogramétricamente con ayuda de los GCP para realizar el filtrado de las
nubes de puntos y la generación de productos.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
47
El procesamiento de las imágenes obtenidas con los vuelos del eBee se realiza en
el software Postflight Terra 3D-EB, que es un software fotogramétrico profesional
que genera mapas 2D y modelos 3D hasta con precisión centimétrica.
Tabla 3: Características del Postflight Terra 3D Fuente Software Postfligth Terra 3D, 2017
El programa Postflight es autónomo en la calibración y procesamiento de las
imágenes, ofreciendo un alto grado de confiabilidad en los productos. Sin embargo,
el operador puede evaluar y modificar los GCP, cuando el resultado de los ajustes
no es el más acertado.
3.10.1 Geo-etificado de las Fotografías
El primer proceso del software corresponde a la orientación del modelo
fotogramétrico, para ello emplea las coordenadas del centro de proyección de la
fotografías asignadas por el GPS interno del Drone.
En el procesamiento inicial se lleva a cabo la correlación, Aero triangulación y orto
rectificación de las imágenes, se verifica el traslapo de estas. También se obtiene
una nube de puntos general, con la cual se puede pre visualizar el modelo de
superficie del área levantada.
Inputs Processing rayCloud EditorAerial (nadir and oblique) imagery support Rapid Check processing mode Project viewing
Multi-camera support for the same project Rapid NDVI map creation Manual tie point editing
MultiSPEC 4C support Rapid Check Quality report Project reoptimization
Multiple file types Camera self-calibration Image annotation
Ground Control Point edit and import Automatic Aerial Triangulation (AAT) and Bundle Block Adjustment (BBA) Point cloud editing
Local, global and arbitrary coordinate reference system Automatic point cloud densification Polyline object creation
Camera position and exterior orientation (omega, phi, kappa) support Automatic point cloud classification and DTM extraction (BETA) Surface object creation
External point cloud import Point cloud filtering and smoothing Stockpile object creation (volume measurement)
eBee RTK high precision images Automatic brightness and color correction Digitization tools / vector object editing
Quality report Fly-through animation
Project merging
Project area definition
Project splitting
GPU support

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
48
Ilustración 30: Orientación de líneas de vuelo y Aero triangulación fotogramétrica Fuente SAR INGENIERIA, 2017
3.10.2 Densificación de la Nube de Puntos
Orientado el modelo fotogramétrico, se realiza la alineación espacial de las
fotografías mediante los GCP o puntos de control, los cuales se importan al software
mediante un archivo plano. Estos se deben identificar en las fotografías,
seleccionando el centro aproximado de la demarcación, para generar un ajuste en
bloque, donde se obtienen los residuales a cada punto. Si los residuales no superan
los parámetros de ajuste el software permite la densificación de la nube de puntos
generando un modelo digital de la superficie (DSM).
Por ultimo para llegar a tener un modelo digital de terreno (DTM), se lleva a cabo un
filtrado manual en donde se depuran edificaciones, vegetación baja, media y alta,
por medio de líneas y polígonos de modo que se ajusten estos puntos altos al
terreno.
Ilustración 31: Densificación de la nube de puntos Fuente SAR INGENIERIA, 2017.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
49
3.10.3 Orto Mosaico y DTM
La última instancia en el procesamiento de las imágenes, es la generación del orto
mosaico, en el cual se recopilan las fotografías orto rectificadas donde el software
realiza los ajustes de tonos y contrastes para obtener una alta resolución con
excelente definición y nitidez.
Posterior a ello se puede vectorizar las curvas de nivel con un intervalo definido,
este proceso lo realiza automáticamente el programa con la nube de puntos filtrada,
dando resultados de alta precisión comparados con levantamientos convencionales
debido a su alto nivel de información.
Ilustración 32: Orto Mosaico y curvas de nivel procesadas
Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
50
4. Resultados
4.1 Listado de coordenadas de puntos de control por humedal
Tabla 4: Listado de coordenadas puntos de control PC en Soacha – Humedal La Herrera
Fuente propia, 2017
PUNTO APOYO PUNTO CONTROL ESTE NORTE ELEVACIÓN
SANTA-BARBARA - ESTACIÓ
974283.542 1004869.170 2688.800
PC84 974186.039 1005066.444 2689.679
PC85 974320.131 1005025.186 2691.033
PC86 973955.562 1004720.408 2672.202
PC87 974302.811 1004823.505 2687.919
PC88 974315.594 1004423.975 2666.114
PC89 974483.178 1004603.739 2667.548
Tabla 5: Listado de coordenadas puntos de control PC en Bojacá – Humedal Santa Bárbara
Fuente propia, 2017
PUNTO DE APOYO PUNTO CONTROL NORTE ESTE ELEVACION
LA HERRERA
8920626 1011874.791 977736.158 2539,7
BOGT 1004851.380 999619.207 -
MADRID 1014515.678 978786.673 2554,5
PC02 1012850.012 976574.518 2541,2
PC04 1012464.318 976893.905 2541,7
PC06 1012164.190 977389.606 2540,5
PC07 1010768.414 976820.167 2547,3
PC10 1010329.672 976941.099 2551,2
PC11 1010738.939 977161.203 2542,6
PC12 1011647.850 978179.414 2540,7
PC13 1010166.537 977404.399 2542,5
PC14 1011533.729 978991.256 2557,5
PC15 1010097.195 977861.891 2542,1
PC16 1010144.730 978408.181 2548,1
PC17 1011034.469 978939.766 2539,9
PC18 1010140.583 978876.129 2548,7
PC19 1010789.163 979399.213 2542.0
PC20 1010239.423 979259.834 2567,7
PC21 1010409.477 979695.839 2541.0
PC22 1010031.643 979708.070 2546,1
PC23 1010051.090 980067.197 2540,7
PC24 1009502.390 979972.273 2544,4
PC25 1009597.871 980184.791 2544,2

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
51
PUNTO AMARRE PUNTO CONTROL ESTE NORTE ELEVACIÓN
CHOCONTA
1041934.062 1058667.367 2620.000
PC01 1041831.638 1058640.738 2619.703
PC04 1041909.396 1058271.360 2618.612
PC05 1041896.775 1057846.756 2619.018
PC08 1041899.695 1057619.152 2622.335
PC-02 1041634.932 1058664.599 2619.459
PC-03 1041478.537 1058264.258 2621.203
PC-06 1041561.535 1057810.145 2620.713
PC-07 1041666.944 1057501.696 2616.942
Tabla 6: Listado de coordenadas puntos de control PC en Chocontá – Humedal Chocontá
Fuente propia 2017
PUNTO AMARRE PUNTO CONTROL ESTE NORTE ELEVACION
ABPW 1010325,237 1009141,481 -
LA PETACA
1043701,123 1053013,697 2987,9
M3 1043270,972 1052736,212 2993,2
M4 1043444,272 1052975,028 3007.000
MANTA1 1043867,896 1052757,478 3002,8
MANTA2 1043617,739 1052605,916 2974,5
MANTA5 1043739,298 1053059,525 2997,2
Tabla 7: Listado de coordenadas puntos de control PC en Machetá – Humedal La Petaca
Fuente propia 2017
4.2 Procesamiento Digital POSTFLIGHT TERRA 3D-EB
Las imágenes obtenidas con los vuelos del eBee se procesaron en el software
Postflight Terra 3D-EB, es un software fotogramétrico profesional que genera mapas
2D y modelos 3D hasta con precisión centimétrica.
4.2.1 Traslapo de Imágenes
Con las imágenes revisadas, se generó un modelo de control de calidad, para
verificar el tamaño de pixel final para la correlación de imágenes y los traslapos
(longitudinal y transversal) entre fotografías consecutivas y adyacentes. Como
resultado se pudo corroborar que dichas variables corresponden con lo planificado
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
52
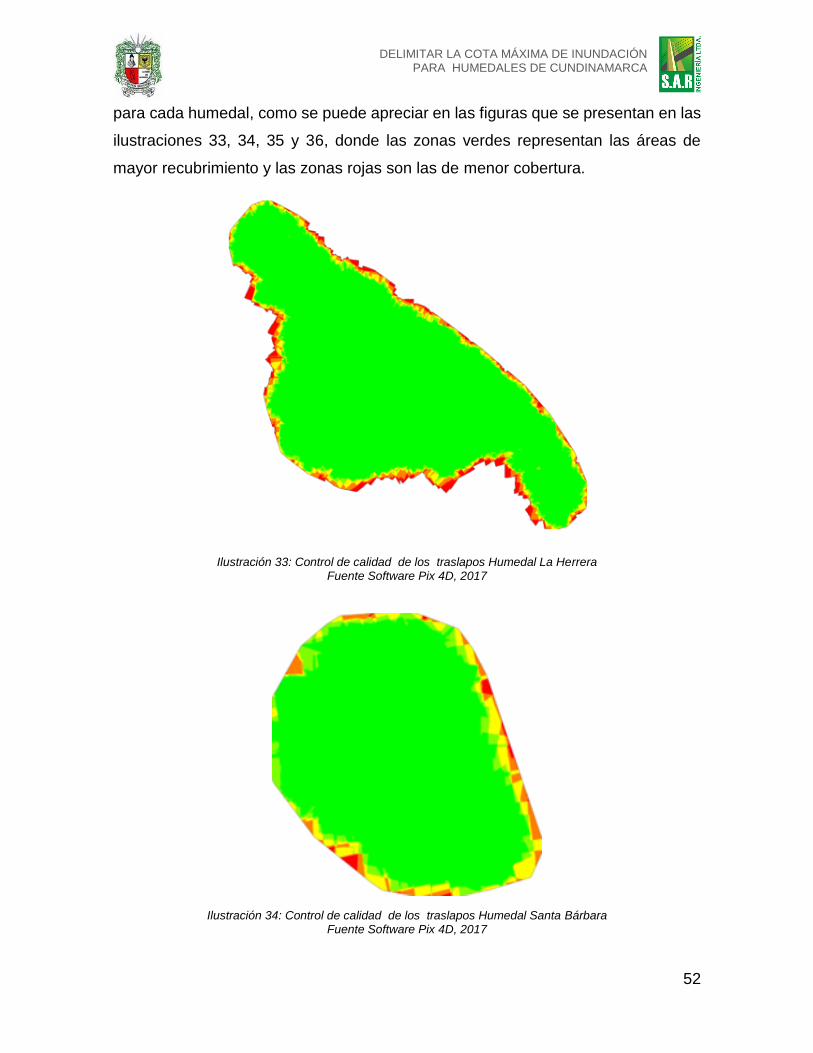
para cada humedal, como se puede apreciar en las figuras que se presentan en las
ilustraciones 33, 34, 35 y 36, donde las zonas verdes representan las áreas de
mayor recubrimiento y las zonas rojas son las de menor cobertura.
Ilustración 33: Control de calidad de los traslapos Humedal La Herrera Fuente Software Pix 4D, 2017
Ilustración 34: Control de calidad de los traslapos Humedal Santa Bárbara Fuente Software Pix 4D, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
53
Ilustración 35: Control de calidad de los traslapos Humedal Pantano Largo
Fuente Software Pix 4D, 2017
Ilustración 36: Control de calidad de los traslapos Humedal Chocontá
Fuente Software Pix 4D, 2017
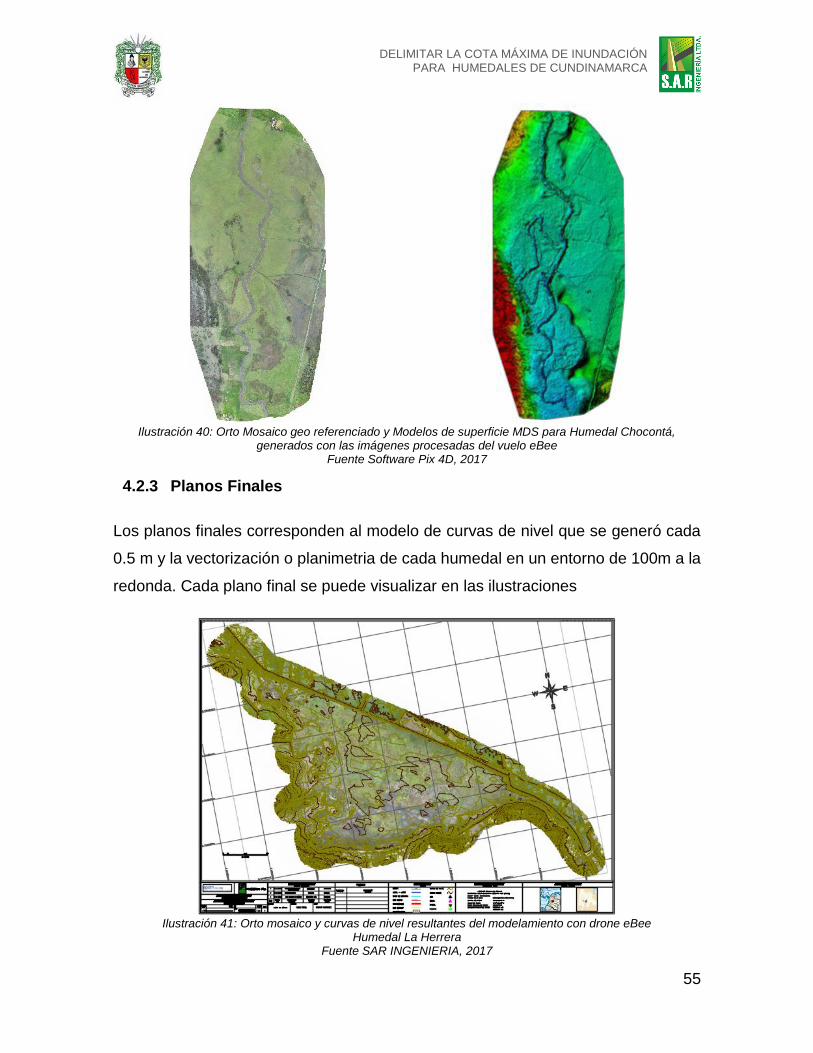
4.2.2 Orto mosaico y MDS
De acuerdo a los anteriores procesos se obtuvo el orto mosaico de 5 cm de pixel y
el modelo digital de terreno para cada humedal (Ver Ilustraciones 37, 38, 39 Y 40)
Ilustración 37: Orto Mosaico geo referenciado y Modelos de superficie MDS para Humedal La Herrera,
generados con las imágenes procesadas del vuelo eBee Fuente Software Pix 4D, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
54
Ilustración 38: Orto Mosaico geo referenciado y Modelos de superficie MDS para Humedal Santa Bárbara,
generados con las imágenes procesadas del vuelo eBee Fuente Software Pix 4D, 2017
Ilustración 39: Orto Mosaico geo referenciado y Modelos de superficie MDS para Humedal Pantano Largo, generados con las imágenes procesadas del vuelo eBee
Fuente Software Pix 4D, 2017
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
55
Ilustración 40: Orto Mosaico geo referenciado y Modelos de superficie MDS para Humedal Chocontá,
generados con las imágenes procesadas del vuelo eBee Fuente Software Pix 4D, 2017
4.2.3 Planos Finales
Los planos finales corresponden al modelo de curvas de nivel que se generó cada
0.5 m y la vectorización o planimetria de cada humedal en un entorno de 100m a la
redonda. Cada plano final se puede visualizar en las ilustraciones
Ilustración 41: Orto mosaico y curvas de nivel resultantes del modelamiento con drone eBee
Humedal La Herrera Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
56
Ilustración 42: Planimetría Humedal La Herrera
Fuente SAR INGENIERIA, 2017
Ilustración 43: Orto mosaico y curvas de nivel resultantes del modelamiento con drone eBee
Humedal Santa Bárbara Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
57
Ilustración 44: Planimetría Humedal Santa Bárbara
Fuente SAR INGENIERIA, 2017
Ilustración 45: Orto mosaico y curvas de nivel resultantes del modelamiento con drone eBee
Humedal Pantano Largo Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
58
Ilustración 46: Orto mosaico y curvas de nivel resultantes del modelamiento con drone eBee
Humedal Chocontá Fuente SAR INGENIERIA, 2017
Ilustración 47: Planimetría Humedal Chocontá
Fuente SAR INGENIERIA, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
59
5. Análisis de resultados
A partir de los diferentes vuelos que se realizaron para cada humedal y los
puntos de control (GCP) empleados, se establece que la distancia máxima a
utilizar es de 500 metros entre cada uno de ellos; Esto se pudo determinar
gracias a la comparación de resultados que se realizó entre el modelo digital
de terreno y la batimetría para puntos de control con distancias mayores a
500 metros; Emplear estas medidas permite establecer una red solida de
puntos de control que garantizaran la precisión de los trabajos desarrollados.
Con el reporte de calidad generado en el software Postfly Terra 3D, se
conoce el traslapo ejecutado en campo y se compara con el traslapo previsto
en la planeación, los cuales deben ser iguales; en los humedales en los que
no se dio cumplimiento a éste parámetro debido a los movimientos propios
del DRONE (Cabeceo, Alabeo, Guiñada), se hizo necesario incrementar el
traslapo transversal y longitudinal en un 10% como desviación estándar.
Traslapo
contractual
Traslapo
ejecutado
Tabla 8 : Traslapo contractual y ejecutado
Fuente propia, 2017
De la gran cantidad de imágenes tomadas por vuelo se crean los
ortomosaicos georreferenciados para cada humedal; cuentan con una gran

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
60
calidad en su resolución y gran definición de detalle, tanto así que de cada
orto mosaico se extrajo la planimetría del entorno del humedal.
El porcentaje de cobertura entre imágenes corresponde a un 85%, esto
representa las imágenes traslapadas en un 100% dentro del área de vuelo,
los demás valores descienden según el porcentaje de cobertura ya que en
los bordes del área de vuelo se va perdiendo significativamente la cantidad
de fotografías tomadas, por ello se debe exagerar el área de vuelo para
realizar una cobertura completa.
Ilustración 48: Porcentaje de cobertura de imágenes Fuente propia, 2017
Como se pudo apreciar a lo largo del documento los humedales trabajados
se encuentran ubicados en cuatro diferentes Municipios a lo largo del
Departamento de Cundinamarca, cada punto base trasladado a los
diferentes humedales cumplió con los estándares de precisión que se
encuentran en la tabla 9 y ello permitió continuar con el trabajo de campo.
Para dar cumplimiento a los paramentos mencionados se ejecutó un proceso
de doble determinación con bases permanentes, si la precisión no cumplía
debido a la distancia o tiempos de rastreo se usaba la red pasiva del IGAC.
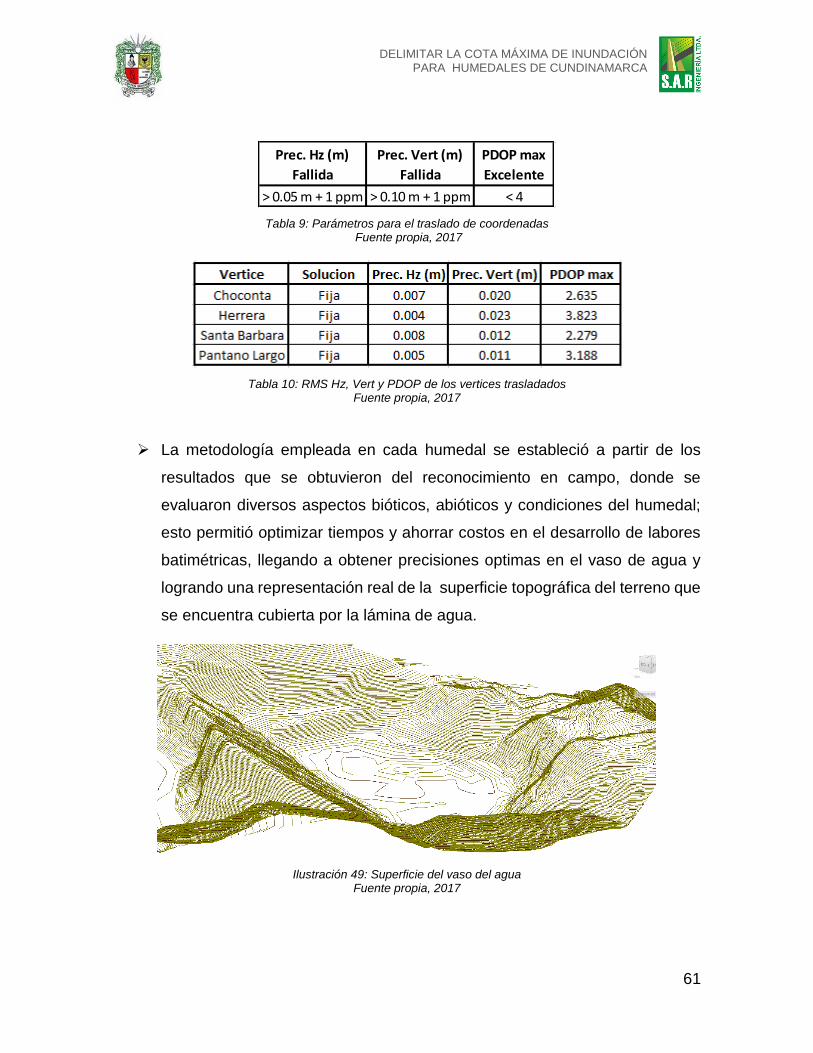
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
61
Tabla 9: Parámetros para el traslado de coordenadas Fuente propia, 2017
Tabla 10: RMS Hz, Vert y PDOP de los vertices trasladados Fuente propia, 2017
La metodología empleada en cada humedal se estableció a partir de los
resultados que se obtuvieron del reconocimiento en campo, donde se
evaluaron diversos aspectos bióticos, abióticos y condiciones del humedal;
esto permitió optimizar tiempos y ahorrar costos en el desarrollo de labores
batimétricas, llegando a obtener precisiones optimas en el vaso de agua y
logrando una representación real de la superficie topográfica del terreno que
se encuentra cubierta por la lámina de agua.
Ilustración 49: Superficie del vaso del agua Fuente propia, 2017
Prec. Hz (m)
Fallida
Prec. Vert (m)
Fallida
PDOP max
Excelente
> 0.05 m + 1 ppm > 0.10 m + 1 ppm < 4

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
62
Los modelos de curvas de nivel se articularon de una manera idónea; al unir
los modelos de curvas de nivel de las batimetrías, con los modelos de curvas
de nivel arrojados por el post proceso del software, se obtiene un modelo
unificado de curvas de nivel que representa la superficie del terreno en el
estado actual, siendo información de gran precisión y exactitud.
Ilustración 50: Modelo de curvas de nivel Batimétrico y Modelo unificado de curvas de nivel Fuente Propia, 2017

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
63
6. Conclusiones
El modelo de curvas de nivel que se obtiene por humedal es gracias a la
combinación de diferentes metodologías de levantamiento topográfico, que
bien encaminadas y con buenos planteamientos en campo permiten obtener
un modelo de curvas de nivel real para cada humedal y para un espacio de
100 metro a la redonda.
Haber obtenido unos resultados dentro de los rangos de precisión que se
requiere, crear un modelo de curvas de nivel a partir de la información
obtenida por diferentes metodologías de levantamientos topográficos y lograr
la correlación de información dentro de un mismo modelo, es muestra y
garantía que los procesos topográficos son complementarios entre sí,
siempre y cuando se cumpla con una rigurosidad en los trabajos de
planeación, trabajos de campo y procesos de oficina.
En los trabajos de campo se contaron con algunos imprevistos, tanto con los
vuelos por presencia de fuertes vientos en algunos sectores, la dificultad para
la marcación de los puntos de control debido al tipo de terreno seco y
polvoriento en algunos sectores, la presencia de buchón y junco para la toma
de las secciones batimétricas y las constantes lluvias que se presentaron, sin
embargo se cumplieron los objetivos propuestos, los pasos estipulados y se
obtuvieron los productos requeridos de manera satisfactoria.
Los vuelos llevados a cabo con DRONE, permiten obtener productos muy
confiables de manera rápida. Sin embargo, es importante hacer claridad a
cerca de los alcances y los productos que se desea obtener, con el fin de
eliminar procesamientos adicionales que requieren tiempo y dedicación,
generando retardos en la entrega de la información.

DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
64
Realizar los controles pertinentes en campo para el desarrollo de vuelos con
DRONE, permite obtener modelos que pueden ser comparados o fusionados
con tecnologías convencionales o de precisión.
Se generó el modelo de curvas de nivel para 0.5 m, con los datos capturados
de campo por las diferentes técnicas empleadas (nubes de puntos – DRONE,
batimetrías, RTK, levantamiento topográfico convencional), donde los datos
obtenidos son ampliamente satisfactorios.
La creación de un orto mosaico georreferenciado y escalado, permitió la
creación del plano que contiene la vectorización del entorno de los
humedales.
DELIMITAR LA COTA MÁXIMA DE INUNDACIÓN PARA HUMEDALES DE CUNDINAMARCA
65
7. Bibliografía
Lawrence, Letham. (2001). GPS Fácil. Barcelona, España: Editorial Paidotribo.
Berne Valero, José Luis, Ana Belen, Anquela Julian, Natalia, Garrido Villen. (2013). GPS
Fundamentos y Aplicaciones en Geodesia y Topografia. España: Editorial Universitat
Politécnica de Valencia.
Puch Ramirez, Carlos. (2001). Manuel Practico de GPS. España: Editorial Ediciones
Desnivel S.L.
Corporación Autónoma Regional CAR. (2011). Humedales del Territorio CAR. Bogotá,
Colombia. Imprenta Nacional de Colombia.
Rejano, Cristina Cuerno. (2015). Los Drones y sus Aplicaciones en Ingeniería Civil. Madrid.
Editorial Graficas Arias Montaño.
Farjas, Martin. (2003). Teoría de Levantamientos Topográficos. Madrid. Ediciones Técnicas
y Científicas.
Civil, Aeronáutica (2015). Requisitos Generales de Aeronavegabilidad y Operaciones para
RPAS. Bogotá, Colombia.
Energia, F. d. (2005). Los Drones y sua aplicación a la Ingenieria Civl. Madrid: La suma de
todos.
Quiroz Londoño, o. M., Romanelli, A., Martinez, D. E., & Bocanegra, E. (2009). Los sistemas
de información geografica como herramienta en los estuduos limnológios.