Control de Proceso
18
Control de proceso El sistema de control nos permitirá una operación del proceso más fiable y sencillo, al Encargarse de obtener unas condiciones de operación estables, y corregir toda desviación que se pudiera producir en ellas respecto a los valores de ajuste. Las principales características que se deben buscar en un sistema de control serán: 1. Mantener el sistema estable, independiente de perturbaciones y desajustes. 2. Conseguir las condiciones de operación objetivo de forma rápida y continua. 3. Trabajar correctamente bajo un amplio abanico de condiciones operativas. 4. Manejar las restricciones de equipo y proceso de forma precisa. Principalmente los beneficios obtenidos serán: Incremento de la productividad Mejora de los rendimientos Mejora de la calidad Ahorro energético Control medioambiental Seguridad operativa Optimización de la operación del proceso/ utilización del equipo Fácil acceso a los datos del proceso El control del proceso consistirá en la recepción de unas entradas, variables del proceso, su procesamiento y comparación con unos valores predeterminados por el usuario, y posterior corrección en caso de que se haya producido alguna desviación respecto al valor preestablecido de algún parámetro de proceso. El bucle de control típico estará formado por los siguientes elementos, a los que habrá que añadir el propio proceso.
-
Upload
raul-alvarado -
Category
Documents
-
view
17 -
download
2
description
Control de Proceso
Transcript of Control de Proceso
Control de proceso El sistema de control nos permitir una operacin del proceso ms fiable y sencillo, al Encargarse de obtener unas condiciones de operacin estables, y corregir toda desviacin que se pudiera producir en ellas respecto a los valores de ajuste. Las principales caractersticas que se deben buscar en un sistema de control sern:
1. Mantener el sistema estable, independiente de perturbaciones y desajustes.2. Conseguir las condiciones de operacin objetivo de forma rpida y continua.3. Trabajar correctamente bajo un amplio abanico de condiciones operativas.4. Manejar las restricciones de equipo y proceso de forma precisa.Principalmente los beneficios obtenidos sern:Incremento de la productividadMejora de los rendimientosMejora de la calidadAhorro energticoControl medioambientalSeguridad operativaOptimizacin de la operacin del proceso/ utilizacin del equipoFcil acceso a los datos del procesoEl control del proceso consistir en la recepcin de unas entradas, variables del proceso, su procesamiento y comparacin con unos valores predeterminados por el usuario, y posterior correccin en caso de que se haya producido alguna desviacin respecto al valor preestablecido de algn parmetro de proceso.
El bucle de control tpico estar formado por los siguientes elementos, a los que habr que aadir el propio proceso.
Elementos de medida (Sensores) Generan una seal indicativa de las condiciones de proceso.
Elementos de control lgico (Controladores): Leen la seal de medida, comparan la variable medida con la deseada (punto de consigna) para determinar el error, y estabilizan el sistema realizando el ajuste necesario para reducir o eliminar el error.
Elementos de actuacin (Vlvulas y otros elementos finales de control): Reciben la seal del controlador y actan sobre el elemento final de control, de acuerdo a la seal recibida.
Se puede hacer una clasificacin de los sistemas de control atendiendo al procedimiento lgico usado por el controlador del sistema para regular la evolucin del proceso. Los principales tipos de control utilizados en los procesos industriales sern:Normales:Sistemas de realimentacin. (Feed-back)ProporcionalIntegralDerivativo*Sistema anticipativo (Feed-Foward)Sistema en cascada (Cascade)Sistema selectivo (Over-Ride)
AvanzadosControl de restricciones (Constraint Control)Control del modelo de referencia (Model Reference Control)Optimizacin de unidades
Sistemas de control con realimentacinSon sistemas de control de bucle cerrado en los que existe una realimentacin continua de la seal de error del proceso al controlador, actuando ste conforme a esta seal buscando una reduccin gradual del error hasta su eliminacin.
Es el tipo de sistemas que ms extendido se encuentra en la actualidad.
Existen diversos diagramas de actuacin con la caracterstica comn de la realimentacin de la seal de error. Sin embargo, seguirn distintos fundamentos de actuando para conseguir la eliminacin del error del sistema.
Control proporcionalEl sistema de control proporcional se basa en establecer una relacin lineal continua entre el valor de la variable controlada y la posicin del elemento final de control. As, la vlvula de control se mover el mismo valor para cada unidad de desviacin.Control integralEl control integral basa su funcionamiento en abrir o cerrar la vlvula, a una velocidad constante, hasta conseguir eliminar la desviacin. La velocidad de accionamiento ser proporcional al error del sistema existente.
Control derivativoEn la regulacin derivada la posicin de la vlvula ser proporcional a la velocidad de cambio de la variable controlada. As, la vlvula sufrir un mayor o menor recorrido dependiendo de la velocidad de cambio del error del sistema.Nos remitimos a las curvas de variacin de las variables del sistema para una mejor comprensin del fundamento operativo de este modo de regulacin.
Control anticipativo (Feed-Forward)En el control anticipativo el controlador del sistema utilizar la lectura de una o ms variables de entrada para actuar sobre la variable manipulada que produce la salida deseada del proceso. No corresponder ya al diseo de bucle cerrado al que hemos visto que respondan los sistemas de realimentacin anteriores.
La principal ventaja de este tipo de sistemas es que no necesitan la aparicin de una desviacin en el sistema para efectuar la correcta regulacin del mismo.
Para adoptar este tipo de control en el sistema ejemplo visto anteriormente tendremos que realizar las modificaciones que se pueden apreciar a continuacin.
Control en cascadaExisten casos en los que la variable manipulada, por su naturaleza, sufre grandesOscilaciones que afectan a la capacidad de control del sistema, llegando inclusive al caso de imposibilitarlo. En el ejemplo hasta ahora expuesto podramos encontrar esta situacin si se diese el caso que la corriente de salida se encontrase turbo aspirada, dependiendo entonces la presin de aspiracin del rgimen al que girara la bomba. As para una misma posicin de la vlvula de vaciado del depsito el caudal de paso por ella depender de la presin en la lnea, siendo por tanto variable con sta.
Generalizando, podemos decir que el sistema de control en cascada acta a un esquema jerarquizado de variables de control, distinguindose entre variables primarias (master) y secundarias (slave). Las variables primarias sern las controladas, mientras que las secundarias son aquellas manipuladas/controladas para conseguir llevar al sistema al rgimen de operacin determinado por las variables primarias. Cabe decir que todo sistema de control en cascada constar al menos de un par de variables relacionadas, una primaria y otra secundaria.
Breve historia del control de procesos
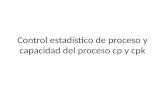
Los primeros sistemas de control conocidos, ya en la antigedad, son mecanismos destinados alcontrol del caudal para regular un reloj de agua o el control de nivel de lquido en una lmpara de aceite o en un recipiente de vino, que se mantiene lleno a pesar de los muchos vasos que se sacan. De hecho, el control del caudal de fluido se reduce al control del nivel del fluido, ya que un pequeo orificio producir caudal constante si la presin es constante. El mecanismo de control de nivel de lquido inventado en la antigedad y todava usado para controlar nivel es la vlvula flotante, semejante a la del depsito de agua de un inodoro corriente. El flotador est hecho de tal manera que, cuando el nivel baja, el caudal del depsito aumenta y cuando el nivel sube, el caudal disminuye y, si es necesario, se corta (Figura 1.1). En este caso el sensor y el actuador estn combinados en el mismo dispositivo, el flotador y la combinacin de tubo de alimentacin.
Figura 1.1. Un tonel que nunca se acaba. Ejemplo del control de nivel de lquido y caudal tal como serealizaba en la antigedad.
Un caso ms moderno de control por retroalimentacin es el control de temperatura de un horno para calentar una incubadora, sistema que fue diseado por Drebbel (hacia 1620). El horno constaba de una caja que contena el fuego, con un tubo en la parte superior provisto de un regulador de tiro (Figura 1.2). Dentro de la cmara de combustin estaba la incubadora de paredes dobles y el hueco que quedaba entre las paredes se llenaba de agua. El sensor de temperatura era un recipiente de vidrio lleno de alcohol y mercurio colocado en la cmara de agua en torno a la incubadora. A medida que el fuego calentaba la caja y el agua, el alcohol se dilataba y el vstago con flotador se desplazaba hacia arriba, bajando el regulador de tiro sobre la boca del tubo. Si la caja est demasiado fra, el alcohol se contrae, el regulador de tiro se abre y el fuego arde ms fuertemente. La temperatura deseada est determinada por la longitud del vstago del flotador, que determina la apertura del regulador de tiro para una dilatacin determinada de alcohol.
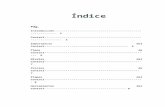
La bsqueda de un medio para controlar la velocidad de rotacin de un eje fue un problema famoso en las crnicas del control automtico. La principal motivacin era la de controlar automticamente la velocidad de la piedra de molienda de un molino de viento harinero. De los varios mtodos que se intentaron, el ms prometedor result ser el que usaba un pndulo cnico, o regulador de bola flotante. Este dispositivo se us para medir la velocidad del molino; las aspas del molino de viento se hacan girar con cuerdas y poleas, casi como persianas, para mantener una velocidad fija. Pero no fue el molino de viento es que hizo famoso el regulador de bola flotante, fue su adaptacin a la mquina de vapor en los laboratorios de James Watt, alrededor de 1788 (Figura 1.3).
Figura 1.2. Croquis de la incubadora de Drebbel para empollar huevos de gallina.
Figura 1.3. Mquina de vapor con un regulador centrfugo o de bola flotante, que aparece en la partederecha de la imagen
La accin del regulador centrfugo es fcil de describir. Supongamos que la mquina est operando en equilibrio y aplicamos de pronto una carga. En ese momento disminuir la velocidad de la mquina y las bolas del regulador caern a un cono ms pequeo. De este modo, el ngulo de las bolas se usa como sensor de salida. Esta accin, a travs de palancas, abrir la vlvula principal al ncleo de vapor (que es el actuador) y admitir ms vapor a la mquina, recuperndola totalidad de la velocidad perdida. Para mantener la vlvula de vapor en una nueva posicin es necesario que las bolas giren a un ngulo diferente, lo que implica que la velocidad con una carga no es exactamente la misma que la anterior. Para recobrar la misma velocidad en este sistema, sera necesario reponer la velocidad deseada cambiando la longitud de la barra de la palanca a la vlvula. Otros inventores introdujeron mecanismos que integraron el error de velocidad y as proporcionaron una reposicin automtica. Estos sistemas tienen error estacionario cero a perturbaciones constantes.
Watt fue un hombre prctico, como el constructor de molinos anterior a l, y no se ocup de anlisis tericos del regulador. En este sentido son de gran importancia las contribuciones de G.B. Airy, que fue profesor de matemticas y astronoma de la Universidad de Cambridge desde 1826 a 1835 y Astrnomo Real en el Observatorio de Greenwich desde 1835 a 1881. Airy se inters por el control de la velocidad; si sus telescopios hubieran podido girar en sentido contrario a la Tierra, se habra podido observar una estrella fija durante largos perodos de tiempo. l utiliz el regulador centrfugo de pndulo y descubri que era capaz de movimiento inestable. Airy realiz la primera exposicin histrica de la inestabilidad en un sistema de control, el anlisis de un sistema a travs de ecuaciones diferenciales y, por tanto, los comienzos del estudio de la dinmica de control con retroalimentacin.
El primer estudio sistemtico de la estabilidad del control retroalimentado apareci en el trabajo On Governors de J.C. Maxwell (1868). En este trabajo, Maxwell desarrolla las ecuaciones diferenciales del regulador, linealizndolas en torno al equilibrio, y estableci que la estabilidad 6 Introduccin generaldepende de que las races de una cierta ecuacin (caracterstica) tengan partes reales negativas. Lo consigui solamente para los casos de segundo y tercer orden. El problema de la determinacin de criterios de estabilidad sirvi para el premio Adams de 1877, que fue ganado por E.J. Routh. Su criterio, desarrollado en el ensayo que obtuvo el premio, tiene el inters suficiente como para que los ingenieros de control sigan aprendiendo a aplicar su sencilla tcnica. El anlisis de la ecuacin caracterstica sigui siendo el fundamento de la teora de control hasta la invencin del amplificador retroalimentado electrnico por H.S. Black en 1927 en los laboratorios de la Bell Telephone. Despus de la publicacin del trabajo de Routh, el matemtico ruso A.M. Lyapunov comenz a estudiar la cuestin de la estabilidad del movimiento; en 1892 utiliz las ecuaciones no lineales de movimiento e incluy resultados equivalentes al criterio de Routh. Su trabajo fue fundamental, pero no se introdujo en la literatura de control hasta 1958. Con la introduccin de los amplificadores electrnicos, las llamadas a larga distancia llegaron a ser posibles en las dcadas posteriores a la Primera Guerra Mundial. Sin embargo, conforme la distancia aumenta, lo hace la prdida de energa elctrica, a pesar del uso del alambre de gran dimetro, y se requieren ms y ms amplificadores para reemplazar las prdidas. Lamentablemente, con tantos amplificadores haba mucha distorsin ya que las pequeas no linealidades de los tubos de vaco se multiplicaban una y otra vez. Como solucin a este problema, Black propuso el amplificador retroalimentado. Para reducir la distorsin hay que aumentar la retroalimentacin, es decir, la ganancia del lazo del actuador debe aumentarse mucho. Todos los quehan tratado de subir el volumen en un sistema de amplificacin pblico mal ubicado han experimentado lo descubierto por Black; con altas ganancias el lazo de retroalimentacin comienza a pitar y es inestable. Aqu, en una tecnologa diferente estaba el problema de estabilidad de Maxwell y Routh, y la dinmica era tan compleja (las ecuaciones diferenciales de orden 50 son muy comunes) que el criterio de Routh no sirvi de mucho. Los ingenieros de comunicaciones estaban familiarizados con la idea de respuesta de frecuencia y con matemticas de variable compleja desarrollada por Cauchy y otros, as que los trabajos en los laboratorios de la Bell se orientaron al anlisis complejo. En 1932, H. Nyquist public un artculo describiendo como determinar la estabilidad desde un grfico de la respuesta de frecuencia del lazo. A partir de esta teora se desarroll una extensa metodologa de diseo de amplificadores retroalimentados, descrita en el libro de Bode (1945).
Simultneamente al desarrollo del amplificador retroalimentado, el control retroalimentado de procesos industriales empez a ser la norma. En este campo, caracterizado por procesos que no solamente son muy complejos sino tambin no lineales y sujetos a retrasos de tiempo relativamente largos entre actuador y sensor, se desarroll la prctica del control proporcional, ms integral y ms diferencial, el control PID descrito por Callender, Hartree y Porter (1936). Esta tecnologa, basada en un amplio trabajo experimental y aproximaciones lineal izadas simples al sistema dinmico, llev a experimentos estndar apropiados para la aplicacin en el campo y finalmente a una satisfactoria sintona de los coeficientes del controlador PID. Tambin se desarrollaron en esta poca los dispositivos para gua y control de aviones; especialmente importante fue el desarrollo de sensores adecuados para medicin de altura y velocidad de los aviones.
Se dio un enorme impulso al control retroalimentado durante la Segunda Guerra Mundial. En Estados Unidos, ingenieros y matemticos del Laboratorio de Radiacin del MIT combinaron sus conocimientos para aportar juntos no solamente la teora de los amplificadores retroalimentados de Bode y el control PID de los procesos, sino tambin de procesos estocsticos desarrollados por N. Wiener (1930). El resultado fue el desarrollo de un conjunto completo de tcnicas para el diseo de mecanismos de control, o servomecanismos, como tambin han sido llamados.
Otro enfoque al diseo de sistemas de control se introdujo en 1948 por W.R. Evans, que trabajaba en el campo de gua y control de aviones. Muchos de estos problemas tiene estados dinmicos inestables o neutralmente estables, y l sugiri un retorno al estudio de la ecuacin caracterstica que haba sido la base del trabajo de Maxwell y Routh 70 aos antes. Sin embargo Evans desarroll tcnicas y reglas que permiten seguir grficamente los pasos de los lugares geomtricos de las races de la ecuacin caracterstica cuando se cambiaba un parmetro. Su mtodo, el lugar geomtrico de las races, es adecuado para el diseo y anlisis de estabilidad y contina siendo hoy da una tcnica importante.
Que es instrumentacinUn sistema de instrumentacin es una estructura compleja que agrupa un conjunto de instrumentos, un dispositivo o sistema en el que se mide, unas conexiones entre estos elementos y por ltimo, y no menos importante, unos programas que se encargan de automatizar el proceso y de garantizar la repetibilidad de las medidas.En trminos abstractos, un instrumento de medicin es un dispositivo que transforma una variable fsica de inters, que se denomina variable medida, en una forma apropiada para registrarla o visualizarla o simplemente detectarla, llamada medicin o seal medida.Una medicin es, entonces, un acto de asignar un valor especfico a una variable fsica. Dicha variable fsica es la variable medida. Un sistema de medicin es una herramienta utilizada para cuantificar la variable medida.El elemento clave fundamental de un sistema de instrumentacin, es el elemento sensor. La funcin del sensor es percibir y convertir la entrada (variable fsica) percibida por el sensor, en una variable de la seal de salida.El sensor es un elemento fsico que emplea algn fenmeno natural por medio del cual sensar la variable a ser medida. El transductor, convierte esta informacin sensada en una seal detectable, la cual puede ser elctrica, mecnica, ptica, u otra. El objetivo es convertir la informacin sensada en una forma que pueda ser fcilmente cuantificada.
Clasificacin de la instrumentacinSe consideran dos clasificaciones bsicas: En funcin del instrumento En funcin de la variable del procesoDe acuerdo al instrumento se tiene: Instrumentos ciegos Instrumentos indicadores Instrumentos registradores Elementos primarios Transmisores Transductores Convertidores Receptores Controladores Elementos finales de controlSon aquellos que no tienen indicacin visible de la variable, tales como presostatos y termostatos (interruptores de presin y temperatura respectivamente) que poseen una escala exterior con un ndice de seleccin de la variable. Son tambin instrumentos ciegos, los transmisores de caudal, presin, nivel y temperatura sin indicacin.Instrumentos ciegos Valvula de INSTRUMENTOS INDICADORESDisponen de un ndice y de una escala graduada en la que puede leerse el valor de la variable. Segn la amplitud de la escala se dividen en indicadores concntricos y excntricos. Existen tambin indicadores digitales que muestran la variable en forma numrica con dgitos.
Voltmetro AnlogoINSTRUMENTOS REGISTRADORESRegistran con trazo continuo o a puntos la variable, y pueden ser circulares o de grfico rectangular o alargado segn sea la forma de grfico.Los registradores de grfico circular suelen tener el grfico de 1 revolucin en 24 horas mientras que en los de grfico rectangular la velocidad normal del grfico es de unos 20 mm/hora.Registrador de lneaELEMENTOS PRIMARIOSEstn en contacto con la variable y utilizan o absorben energa del medio controlado para dar al sistema de medicin una indicacin en respuesta a la variacin de la variable controlada. El efecto producido por el elemento primario puede ser un cambio de presin, fuerza, posicin, medida elctrica, etc. Por ejemplo: en los elementos primarios de temperatura de bulbo y capilar, el efecto es la variacin de presin del fluido que los llena y en los de termopar se presenta una variacin de fuerza electromotriz.
Tubo BourbonTRANSMISORESCaptan la variable de proceso a travs del elemento primario y la transmiten a distancia en forma de seal neumtica de mar gen 3 a 15 psi (libras por pulgada cuadrada) o electrnica de 4 a 20 mA de corriente continua. La seal neumtica de 3 a 15 psi equivale a 0,206 - 1,033 bar (0,21 - 1,05 kg/cm por lo cual, tambin se emplea la seal en unidades SI 0,2 a 1 bar Asi mismo, se emplean seales electrnicas de 1 a 5 mA de 10 a 50 mA y de 0 a 20 mA, si bien la seal normalizada es de 4-20 mA.
Siemens
TRANSDUCTORESReciben una seal de entrada funcin de una o ms cantidades fsicas y la convierten modificada o no a una seal de salida. Son transductores, un rel, un elemento primario, un transmisor, un convertidor PP/I (presin de proceso a intensidad), un convertidor PP/P (presin de proceso a seal neumtica), etc.
Micrfono
CONVERTIDORESSon aparatos que reciben una seal de entrada neumtica (3-15 psi) o electrnica (4-20 mA) procedente de un instrumento y despus de modificarla envan la resultante en forma de seal de salida estndar.Ejemplo: un convertidor P/I (seal de entrada neumtica a seal de salida electrnica, un convertidor I/P (seal de entrada elctrica a seal de salida neumtica).
Conversor corriente presin (Masoneilan)
RECEPTORESReciben las seales procedentes de los transmisores y las indican o registran. Los receptores controladores envan otra seal de salida normalizada a los valores ya indicados 3 -15 psi en seal neumtica, 4 -20 mA en seal electrnica, que actan sobre el elemento final de control.CONTROLADORESComparan la variable controlada (presin, nivel, temperatura, flujo) con un valor deseado y ejercen una accin correctiva de acuerdo con la desviacin.La variable controlada la pueden recibir directamente, como controladores locales o bien indirectamente en forma de seal neumtica, electrnica o digital procedente de un transmisor.
ELEMENTO FINAL DE CONTROLRecibe la seal del controlador y modifica el caudal del fluido o agente de control. En el control neumtico, el elemento suele ser una vlvula neumtica o un servomotor neumtico que efectan su carrera completa de 3 a 15 psi (0,2 - 1 bar). En el control electrnico la vlvula o el servomotor anteriores son accionados a travs de un convertidor de corriente a presin (I/P) o seal digital a presin que convierte la seal electrnica de 4 a 20 mA o digital a neumtica 3 -15 psi. En el control elctrico el elemento suele ser una vlvula motorizada que efecta su carrera completa accionada por un servomotor elctrico.
Vlvula de control neumtica
EN FUNCION DE LA VARIABLE DE PROCESODe acuerdo con la variable del proceso, los instrumentos se dividen en instrumentos de: Caudal Nivel Presin Temperatura Densidad y peso especifico humedad y punto de roco Viscosidad Posicin Velocidad pH Conductividad TurbidezEsta clasificacin corresponde especficamente al tipo de las seales medidas siendo independiente del sistema empleado en la conversin de la seal de proceso. De este modo, un transmisor neumtico de temperatura del tipo de bulbo y capilar, es un instrumento de temperatura a pesar de que la medida se efecta convirtiendo las variaciones de presin del fluido que llena el bulbo y el capilar. Esta clasificacin corresponde especficamente al tipo de las seales medidas siendo independiente del sistema empleado en la conversin de la seal de proceso. De este modo, un transmisor neumtico de temperatura del tipo de bulbo y capilar, es un instrumento de temperatura a pesar de que la medida se efecta convirtiendo las variaciones de presin del fluido que llena el bulbo y el capilar.
INSTITUTO TECNOLOGICO SUPERIOR DE VILLA LA VENTA
CATEDRATICO:ING.GLORIA SUSANA VILLALOBOS
TEMAS:CONTROL DE PROCESOEVOLUCIONJ DE CONTROL DE PROCESO -breve historia QUE ES INTRUMENTACION DEFINICION DE INSTRUMENTACIONCLASIFICACION DE LOS INSTRUMENTACION
Presenta:
EDUARDO ESCAMILLA DE LA CRUZGRUPO Y GRADO:6.- tMATERIA:INSTRUMENTACION
Villa la Venta Huimanguillo, Tabasco 24/02/2015