CONTROL DE POSICIÓN-VELOCIDAD PARA MOTOR DC …
81
CONTROL DE POSICIÓN-VELOCIDAD PARA MOTOR DC BRUSHLESS Diego Alberto Herrera C. Felipe Andrés Torres S. Trabajo de grado para optar por El titulo de Ingeniero Electrónico Director Ing. Camilo Otálora Sánchez M.Sc. PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA ELECTRONICA 2010
Transcript of CONTROL DE POSICIÓN-VELOCIDAD PARA MOTOR DC …
CONTROL DE POSICIÓN-VELOCIDAD PARA MOTOR DC BRUSHLESS
Diego Alberto Herrera C.
Felipe Andrés Torres S.
Trabajo de grado para optar por El titulo de
Ingeniero Electrónico
Director
Ing. Camilo Otálora Sánchez M.Sc.
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA ELECTRONICA
2010
2
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA ELECTRONICA
RECTOR P. JOAQUÍN EMILIO SÁNCHEZ GARCÍA, S.J
DECANO ACADEMICO ING. FRANCISCO JAVIER REBOLLEDO MUÑOZ
DECANO DEL MEDIO P. SERGIO BERNAL RESTREPO, S.J
DIRECTOR DE CARRERA ING. JUAN MANUEL CRUZ M.Ed.
DIRECTOR DE PROYECTO ING. CAMILO OTALORA SANCHEZ M.Sc.
3
ARTÍCULO 23 DE LA RESOLUCION No. 13 DE JUNIO DE 1946
“La universidad no se hace responsable de los conceptos emitidos por sus alumnos en sus
proyectos de grado. Solo velará porque no se publique nada contrario al dogma y la moral
católica y porque los trabajos no contengan ataques o polémicas puramente personales. Antes
bien, que se vea en ellos el anhelo de buscar la verdad y la justicia”.

4
DEDICADO A TODAS LAS PERSONAS QUE CONTRIBUYERON CON
EL LOGRO DE ESTE OBJETIVO, COMO PARTE DE MI VIDA
PROFESIONAL, Y PERSONAL, ESPECIALMENTE A MI FAMILIA,
A MIS PADRES, A MI ABUELA, MI TIA, A MI NOVIA
A MI HERMANA, A MIS AMIGOS, POR LA AYUDA CON
CADA PIEDRA EN ESTE LARGO CAMINO.
Diego Herrera.
DEDICADO A MI FAMILIA
EN MI CORAZÓN, SIEMPRE
Felipe Andrés Torres
5
AGRADECIMIENTOS
A nuestro director de tesis Ing. Camilo Otálora Sánchez, por su interés en el trabajo, su tiempo y
sus conocimientos.
A Carlos Gómez, y el personal del laboratorio por la ayuda en este proceso.
A los porteros “capis”, Rincón, Jaramillo, y Beltrán, por su compañía.
6
TABLA DE CONTENIDO
1 INTRODUCCIÓN ................................................................................................................. 11
2 MARCO TEORICO .............................................................................................................. 13
2.1 Antecedentes ................................................................................................................... 13
2.1.1 Motor eléctrico ........................................................................................................ 13
2.1.2 Motor síncrono ........................................................................................................ 14
2.2 Generalidades Motor DC Brushless................................................................................ 14
2.3 Teoría de Funcionamiento BLDC ................................................................................... 15
2.3.1 La maquina AC y los vectores espaciales, modelado del estator ............................ 15
2.3.2 Estructura Básica Motor Brushless DC ................................................................... 20
2.3.2.7 Inducción En Los Devanados Del Estator Debido A La Rotación De .................... 26
2.3.3 Características De Torque-Velocidad ...................................................................... 28
2.3.4 Comparación De Motores BLDC Con Otros Motores ............................................ 28
2.4 Teoría de Funcionamiento Inversor Trifásico................................................................. 30
2.5 Space Vector Pulse Width Modulation (SVPWM) ........................................................ 33
2.6 Diseño Del Controlador .................................................................................................. 36
2.6.1 Objetivos Del Controlador....................................................................................... 37
2.7 Modelado De La Maquina DC Y La Carga Mecánica ................................................... 37
2.8 Esquema de Control ........................................................................................................ 38
2.9 Tipos de Conmutación .................................................................................................... 40
2.10 Encoder........................................................................................................................ 40
2.11 Otros Trabajos ............................................................................................................. 41
3 ESPECIFICACIONES .......................................................................................................... 42
3.1 Diagrama en Bloques ...................................................................................................... 42
3.2 Descripción General........................................................................................................ 44
4 DESARROLLOS................................................................................................................... 47
4.1 ADC 10bits ..................................................................................................................... 47
4.2 Control PID ..................................................................................................................... 48
4.3 Generador de Ondas Seno a Partir de SVM .................................................................... 49
4.4 Cálculo Del Sector .......................................................................................................... 53
4.5 Inversor Trifásico ............................................................................................................ 53
4.6 Calculo de velocidad ....................................................................................................... 55
7
4.7 Bloque QEI (Quadratura Encoder Interface) .................................................................. 56
4.8 Maquina de estados ......................................................................................................... 56
4.9 Modelado Motor por medio de Software ........................................................................ 58
4.10 Interfaz Grafica en LabView ....................................................................................... 58
5 ANALISIS DE RESULTADOS ............................................................................................ 61
5.1 Verificación de parámetros del motor............................................................................. 61
5.2 Respuesta Paso Motor ..................................................................................................... 66
5.3 Sintonización PID ........................................................................................................... 69
5.4 Costos y Fuentes de Financiación ................................................................................... 73
6 CONCLUSIONES ................................................................................................................. 74
7 BIBLIOGRAFIA ................................................................................................................... 76
8 ANEXOS ............................................................................................................................... 78
8
LISTA DE FIGURAS
Figura 1 esquema motor DC sin escobillas, tomada de [5] ........................................................... 14
Figura 2. Motor DC con escobillas, tomada de [22] ..................................................................... 15
Figura 3. Ejes magnéticos motor de tres fases, 2 polos, tomada de [22] ....................................... 16
Figura 4 Distribución sinusoidal del devanado de la fase a en el estator, tomada de [1] .............. 16
Figura 5. (a) Integral para el cálculo de intensidad de campo magnético. (b) circuito magnético
equivalente, de [23] ....................................................................................................................... 17
Figura 6 Fase a para una maquina de 4 polos, de [22] .................................................................. 17
Figura 7 Campos en el entrehierro ................................................................................................ 17
Figura 8 (a) Diagrama para tres fases en el estator. (b) conexión wye bobinas del estator, de [22]
....................................................................................................................................................... 18
Figura 9 Diagrama de los vectores Fa, Fb, Fc, e Fs, de [22] ......................................................... 18
Figura 10. Generación del vector de campo en el estator (4 posiciones) ...................................... 19
Figura 11 Corrientes, y voltajes inducidos en cada una de las bobinas, de [22] ........................... 19
Figura 12 Estator con devanados sinusoidales, de [4]. .................................................................. 20
Figura 13 Campo en el Rotor, de [23] ........................................................................................... 20
Figura 14 configuraciones posibles para magnetos en el rotor, de [4] .......................................... 20
Figura 15 Vector espacial para representar el campo del rotor, de [22] ........................................ 21
Figura 16 Campos en el estator, y en el rotor para un instante de tiempo, de [22] ....................... 22
Figura 17 Campos en motores DC con escobillas y Brushless DC, de [23] ................................. 23
Figura 18 Acople carga - motor ..................................................................................................... 23
Figura 19 Vectores debido a imán permanente en el rotor, de [22] .............................................. 25
Figura 20 Campos debido a Is, de [22] .......................................................................................... 26
Figura 21 Diagrama vectorial, de [22]........................................................................................... 27
Figura 22 Circuito equivalente para una fase, de [5] ..................................................................... 27
Figura 23 circuito simplificado, de [5] .......................................................................................... 27
Figura 24 Relación Velocidad – Torque, de [4] ............................................................................ 28
Figura 25 Inversor trifásico y devanados del motor, de [27] ......................................................... 30
Figura 26 Estados de conmutación del inversor trifásico, tomada de [15].................................... 31
Figura 27 Tabla de estados de conmutación .................................................................................. 32
Figura 28 Hexágono formado por los vectores de conmutación, de [15] ...................................... 32
Figura 29 diagrama hexagonal de los estados de conmutación, tomada de [15] ........................... 33
9
Figura 30 ciclos útiles dependientes del SVPWM, tomada de [6] ................................................ 33
Figura 31 Cálculo de tiempos para ciclos útiles, tomada de [6] .................................................... 34
Figura 32 ciclos útiles, tomada de [6]............................................................................................ 34
Figura 33 voltajes línea a línea, tomada de [6] .............................................................................. 34
Figura 34 Vector sintetizado, en el estator (arriba), en las señales de alimentación (abajo), de [27]
....................................................................................................................................................... 35
Figura 35 conmutación de vectores adyacentes (arriba), conmutación de vectores adyacentes y
nulos (abajo), de [15] ..................................................................................................................... 35
Figura 36. Control retroalimentado, de [22] .................................................................................. 36
Figura 37 Controlador PI ............................................................................................................... 36
Figura 38 (a) margen de fase (b) Ancho de Banda ........................................................................ 37
Figura 39 Modelo Eléctrico de Motor ........................................................................................... 37
Figura 40 modelo electro mecánico del motor .............................................................................. 38
Figura 41 Diagrama de bloques control PID, de [24].................................................................... 39
Figura 42. Aproximación por métodos de Euler, de [13]. ............................................................. 39
Figura 43, tipos encoder absoluto eje hueco, incremental eje solido, ranurado embebido. .......... 41
Figura 44 diagrama encoder incremental, tomada de [19] ............................................................ 41
Figura 45 Diagrama de bloques ..................................................................................................... 43
Figura 46 Diagrama en bloques dinámicos, control de velocidad. ................................................ 43
Figura 47 Diagrama en bloques dinámicos, control de posición. .................................................. 44
Figura 48 Diagrama microcontrolador, tomada de [19] ................................................................ 46
Figura 49 formatos del ADC, tomada de [19] ............................................................................... 47
Figura 50 Resultados ADC dependiendo del formato, tomada de [19] ......................................... 47
Figura 51 esquema PID, de [24] .................................................................................................... 48
Figura 52 Diagrama por periodos para SVM ................................................................................ 50
Figura 53 Señales de SVM conformadas ...................................................................................... 50
Figura 54 señales SVM.................................................................................................................. 51
Figura 55 Sectores y vectores generadores.................................................................................... 52
Figura 56 Ejemplo distribución de los vectores en tiempo ........................................................... 52
Figura 57 Diagrama de tiempos sensores de efecto hall, de [25] .................................................. 53
Figura 58 inversor trifásico............................................................................................................ 54
Figura 59 periodo completo de la señal en el SVM ...................................................................... 54
Figura 60 azul=voltaje a, amarillo=voltaje b, rojo=voltaje a-b ..................................................... 55
10
Figura 61 azul=voltaje b, amarillo=voltaje c, rojo=voltaje b-c ..................................................... 55
Figura 62 azul=voltaje a, amarillo=voltaje c, rojo=voltaje a-c ..................................................... 55
Figura 63 Diagrama de tiempos QEI, tomada de [10] ................................................................... 56
Figura 64 Maquina de estados del programa ................................................................................. 57
Figura 65 Modelo eléctrico de una fase......................................................................................... 58
Figura 66 Modelo dinámico de una fase con carga ....................................................................... 58
Figura 67 Interfaz grafica en LabView.......................................................................................... 59
Figura 68 Diagrama de bloques funciones en LabView (1) .......................................................... 59
Figura 69 Diagrama de bloques funciones en LabView (2) .......................................................... 60
Figura 70 Señales del fabricante .................................................................................................... 61
Figura 71 Sensores de efecto hall, y ciclos útiles de PWM. .......................................................... 62
Figura 72 Ciclos útiles, y sensores Hall. ....................................................................................... 62
Figura 73 Señales de alimentación trapezoidal al motor, para una fase (arriba), para dos fases
(abajo) ............................................................................................................................................ 63
Figura 74 Ke, relación de voltaje inducido (v) y velocidad (rd/s) ................................................. 63
Figura 75 Relación para la fricción Ke*I/w .................................................................................. 64
Figura 76 Relación PWM - velocidad ........................................................................................... 64
Figura 77 Relación de Corriente - %PWM ................................................................................... 64
Figura 78 Modelo usado para medir I - %PWM ........................................................................... 65
Figura 79 Corriente medida en el punto señalado en el modelo ................................................... 65
Figura 80 Modelo Motor, medidas de B y Ke ............................................................................... 66
Figura 81 Valores para el ajuste de parámetros ............................................................................. 66
Figura 82 respuesta paso malla abierta para el motor DC, tres pasos seguidos, a 50% C.U. ........ 67
Figura 83 Modelo del motor a malla abierta ................................................................................. 67
Figura 84 respuesta simulada del paso para el modelo del motor a 50% C.U. ............................. 68
Figura 85 valores medidos motor a 20% C.U. .............................................................................. 68
Figura 86 respuesta paso simulada a 20% C.U. ............................................................................ 69
Figura 87 Respuestas para diferentes ganancias proporcionales ................................................... 70
Figura 88 Respuestas para diferentes Ki, con Kp = 0.3 ................................................................ 70
Figura 89 Respuestas para diferentes Kd, con Kp = 0.3 y Ki = 0.02 ............................................ 71
Figura 90 Respuestas del control de posición para diferentes valores de Kp. ............................... 71
Figura 91 Respuestas del control de posición para diferentes valores de Ki, con Kp = 0.3. ......... 72

11
Figura 92 Respuestas del control de posición para diferentes valores de Kd, con Kp = 0.3, y
Ki=0.001. ....................................................................................................................................... 72
Figura 93 Montaje Controlador Motor Brushless DC ................................................................... 79
Figura 94 Montaje Controlador Motor Brushless DC frontal ....................................................... 79
Figura 95 Descripción dimensiones físicas motor ......................................................................... 80
Figura 96 Esquemático circuito ..................................................................................................... 81
1 INTRODUCCIÓN
El presente trabajo de grado realizado como culminación de los estudios de la carrera de
ingeniería electrónica en la Pontificia Universidad Javeriana, aborda el desarrollo de un control
de velocidad y posición para un motor DC brushless, el lector podrá entender el desarrollo y
descripción de este trabajo con la consideración de poseer conocimientos y conceptos previos,
particulares de un trabajo en control de motores de diferentes tipos, en especial de un motor de
corriente continua con escobillas, también conocido como motor CC o simplemente motor DC.
Los motores DC brushless también son conocidos como motores síncronos de imán permanente
PMSM, por sus siglas en ingles. Debido a que existen dos tipos de alimentación para estos
motores, algunos fabricantes los identifican por separado. Las dos formas de alimentación de
estos motores son, por señales trapezoidales, o por señales sinusoidales, y la clasificación más
cómoda podemos decir, es identificar los motores DC brushless como motores de alimentación
trapezoidal, y los motores PMSM como motores de alimentación sinusoidal, sin embargo a lo
largo del trabajo no haremos la clasificación de esta manera, nos limitaremos a identificar nuestro
motor como DC brushless, y nuestra alimentación será sinusoidal.
El contexto para el desarrollo de este tipo de trabajos es muy amplio, desde siempre el hombre ha
buscado el manipular su entorno con la mayor eficiencia, y el uso de motores desde su invención
no ha sido la excepción. En cualquier tipo de aplicación e industria podríamos encontrar motores,
debido a que el desplazamiento de objetos en condiciones controladas, hace parte integral de los
procesos que nos afectan diariamente, como el tomar un ascensor, encender el vehículo, hasta
procesos más complejos, tales como cirugías asistidas por robot, manufactura de tipos muy
variados en los que implica desplazamientos, soldaduras, controles de calidad por manipuladores,
y una infinidad de actividades en las que se pueden encontrar el uso de motores (ver [16, 28]).
Por esta razón no existe un único contexto en el que se pueda clasificar el trabajo de un
controlador, ya que de igual forma es imposible separar el motor de su controlador, y tampoco
podemos clasificar la utilidad del motor con un solo grupo de aplicaciones. Sin embargo podemos
identificar una serie de aplicaciones que particularmente hacen uso de este tipo de motores, y
unas características generales que los identifican, entre estas características están, el pequeño
tamaño, la buena eficiencia, el poco mantenimiento requerido, su larga vida útil, estas como las
características más representativas del motor, que permiten trabajar en ambientes que requieren
dichas características. Las aplicaciones más comunes de estos motores las encontramos hoy en
12
las maquinas de espacios reducidos, y aplicaciones con potencias menores a 10kW, como lo son
los computadores, en la lectura de CD, del disco duro, de otros dispositivos como disquetes, y en
la misma locomoción de bandejas, y periféricos de estos equipos como ventiladores. Otra
aplicación común la podemos encontrar en los aeromodelos donde su uso es muy amplio, las
ventajas de estos motores los están haciendo migrar a otras aplicaciones como locomoción de
vehículos eléctricos e híbridos en la industria automotriz como opción para el remplazo de
motores de combustión interna, como opción de uso de energía renovable. De allí que se
justifique el trabajo en este tipo de motores, como parte de generar un conocimiento por este tipo
de tecnología, que no es nueva pero está adquiriendo usos diferentes, y necesidades de otro tipo,
que permiten abrir o retomar caminos. Como ingenieros, nos brinda una opción de desarrollo
profesional. De allí que la importancia no solo radica en el hecho de desarrollar la tecnología
necesaria, si no aprender a usar correctamente nuestro conocimiento en este proceso.
Si vemos el diseño de un controlador de velocidad y posición para un motor cualquiera, como
una interconexión de bloques funcionales podemos enumerar dichos bloques, y explicar su
funcionalidad más allá de las particularidades que sean necesarias para que realice dicha función.
En este orden de ideas los bloques necesarios para el desarrollo del control serian los siguientes,
una unidad de procesamiento de información, una etapa de potencia, una unidad de interfaz con
el usuario, elementos de comunicación y adquisición de datos para la operatividad completa,
donde usuario, motor, y controlador hagan parte de una solución que busque generar unas
condiciones necesarias para cumplir un objetivo, en este caso, condiciones físicas, la velocidad o
posición de un cierto elemento.
Se expondrá en el marco teórico una descripción general de cada uno de los bloques, intentando
poner al lector en un contexto general de tal manera que pueda comprender las diferentes
funciones realizadas a lo largo del trabajo, una descripción mas particular y cuantitativa se
realizara en la descripción de bloques, donde se consignarán los elementos necesarios para
generar estos bloques orientados a esta aplicación particular.
En síntesis, los bloques desarrollados comprenden un driver para un motor Brushless DC, con
alimentación sinusoidal, y un control PID para el manejo del mismo.
La falta de proyectos desarrollados sobre este tema en la Pontificia Universidad Javeriana da
nuevamente sustento a la idea de desarrollar el controlador ya mencionado, relacionado con los
trabajos anteriores desarrollados en esta área se encuentra la tesis de grado “CONTROL DE UN
MOTOR BRUSHLESS DC CON FRENADO REGENERATIVO” la cual explora un importante
uso de los motores DC brushless para la locomoción de automóviles eléctricos.
Los alcances y objetivos del proyecto abarcan la totalidad del trabajo realizado, y puede
cuantificarse su relevancia con un porcentaje determinado de la totalidad del proyecto.
El objetivo general era realizar un controlador de velocidad-posición para un motor DC brushless
con alimentación sinusoidal, y su correspondiente driver.
A continuación enumeraremos los objetivos específicos necesarios para dicho propósito.
Realizar un controlador PID de posición por medio de potenciómetro y encoder
incremental. (45%)
Realizar controlador PID de velocidad por medio de encoder incremental. (45%)
Desarrollar comunicación entre procesador y PC por medio de protocolo MODBUS y estándar EIA/RS485. (5%)
Implementar interfaz grafica para controlar parámetros del motor. (5%) Las especificaciones esperadas para dicho control consisten en:
13
- Manejo de un motor brushless DC con corriente máxima de 8 amperios y voltaje de entrada en el
rango de 12 a 24 VDC.
- Interface grafica que permita controlar la velocidad y la posición del motor, y visualizar comportamientos de ciertas variables del control.
- Implementar entradas análogas para controlar la velocidad o la posición del motor.
2 MARCO TEORICO
2.1 Antecedentes
2.1.1 Motor eléctrico
Michael Faraday fue el que descubrió el principio del motor eléctrico, la inducción. Inducción es
la generación de una corriente eléctrica en un conductor en movimiento en el interior de un
campo magnético. A partir de ese descubrimiento se potenció el estudio sobre la electricidad y
electrónica implicadas en el proceso de movimiento de motores eléctricos. Podemos decir que de
allí, al desarrollo del motor DC Brushless no fue posible encontrar un hilo histórico que nos
condujera al inventor del motor Brushless DC, sin embargo podemos encontrar la historia de los
motores eléctricos de corriente alterna, y en especial los motores AC síncronos (ver [20, 26]).
En 1882 el inventor serbio Nikola Tesla identificó el campo magnético rotativo, e iniciado el uso
de esta fuerza del campo electromagnético que rota, y puede generar el esfuerzo de torsión en
máquinas rotativas. Él explotó este principio en el diseño de un motor de inducción polifásico en
1883. En 1885, Galileo Ferraris investigó independientemente el concepto. En 1888, Ferraris
publicó su investigación en un papel a la academia real de ciencias en Turín (ver [20, 26, 18)].
La introducción del motor de Tesla en 1888, es un inicio qué se refiere a veces como Revolución
en segundo lugar industrial, haciendo posible la generación eficiente y la distribución interurbana
de energía eléctrica, el sistema de transmisión de la corriente alterna, también invención de Tesla
(1888). Antes del uso extenso del principio de Tesla de la inducción polifásica para las máquinas
que rotaban, todos los motores funcionaron continuamente pasando un conductor a través de un
campo magnético inmóvil (ver [20, 26]).
Tesla sugirió inicialmente que los conmutadores de esta máquina podría ser removidos y el
dispositivo podría funcionar encendido un campo rotatorio de fuerza electromagnética. El
profesor Poeschel, su profesor, indico que dicho experimento estaría relacionado con la
construcción de la máquina de movimiento perpetuo. Esto era porque el profesor de Tesla había
entendido solamente una mitad de las ideas de Tesla (ver [20, 26, 14]).
Tesla obtendría más adelante la patente estadounidense 0.416.194 , Motor eléctrico (Diciembre
de 1889). Este motor electromagnético clásico de la corriente alterna, es lo que hoy conocemos
como motor de inducción.
Michail Osipovich Dolivo-Dobrovolsky inventó más adelante un “rotor-jaula trifásico” en 1890.
Este tipo de motor ahora se utiliza para la mayoría de usos comerciales (ver [20, 26, 14]).
14
2.1.2 Motor síncrono
Si las conexiones a las bobinas del rotor de un motor trifásico se toman hacia fuera en los anillos
de deslizamiento, y se alimenta una corriente de campo separada para crear un campo magnético
continuo (o si el rotor consiste en un imán permanente), el resultado es un motor síncrono, porque
el rotor rotará en sincronismo con el campo magnético, que rota debido a la fuente eléctrica
polifásica.
Hoy en día, los motores síncronos son conducidos con frecuencia como motores transistorizados
de frecuencia variable, y se utilizan de vez en cuando como motores de tracción, el TGV puede
ser el ejemplo más conocido de tal uso (ver [14]).
2.2 Generalidades Motor DC Brushless
Los motores DC brushless también conocidos como motores de corriente directa sin escobillas
han ido tomando importancia a la hora de desarrollar proyectos frente a los motores DC con
escobillas. Una de las razones de esto es la mayor eficiencia presentada por los motores
brushless frente a los motores con escobillas. Otros factores que hacen preferible el uso de
motores brushless es la mayor confiabilidad de estos últimos, además de mayores periodos de
vida útil y la reducción de ruido cuando se encuentran en funcionamiento. Todo esto debido a la
característica que deviene de su nombre, la ausencia de escobillas (ver [4, 22]).
El gran rango de aplicaciones que en la actualidad tienen este tipo de motores y por consiguiente
su diversidad de tamaños-potencias, es debido a las características físicas que permite su fácil
construcción en varios tamaños. Además de esto la relación peso potencia presentada por los
motores DC brushless es superior que la presentada en motores DC con escobillas.
Los motores eléctricos pueden ser energizados de dos formas. Por corriente directa, proveniente
de una batería, que por lo general se encuentra en dispositivos móviles o en vehículos. Otra forma
de dar energía a este tipo de motores es a través de corriente alterna por medio de una red de
distribución eléctrica comercial.
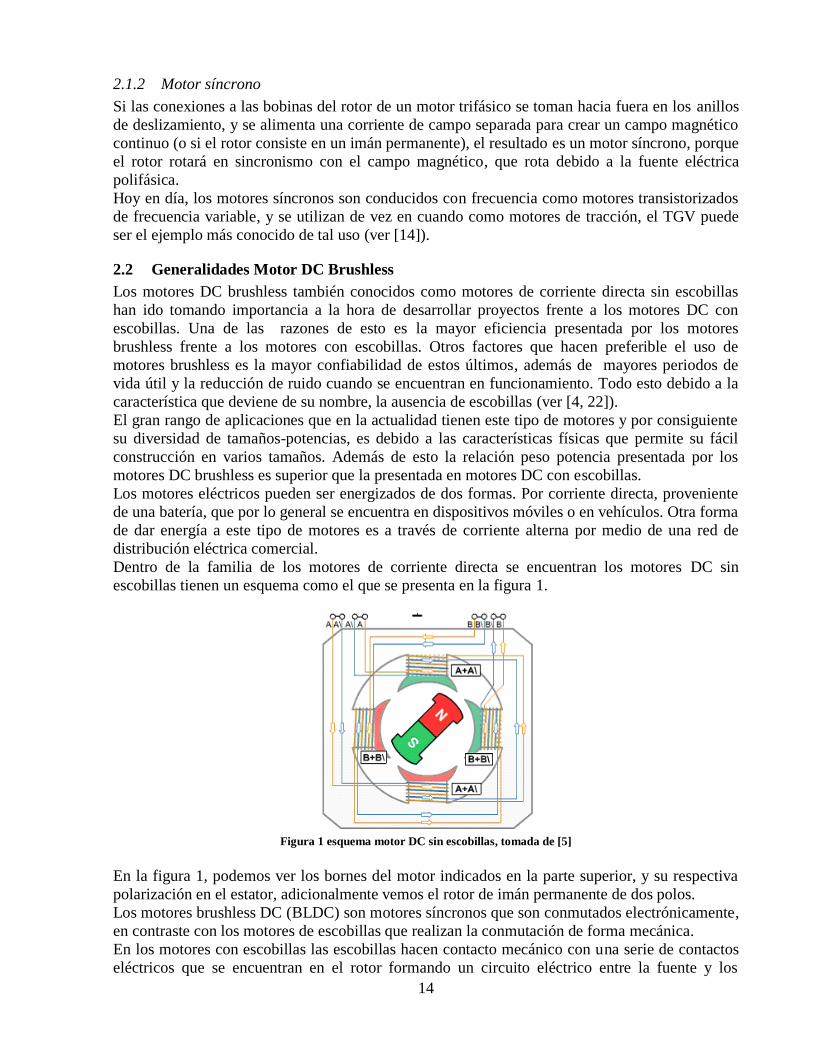
Dentro de la familia de los motores de corriente directa se encuentran los motores DC sin
escobillas tienen un esquema como el que se presenta en la figura 1.
Figura 1 esquema motor DC sin escobillas, tomada de [5]
En la figura 1, podemos ver los bornes del motor indicados en la parte superior, y su respectiva
polarización en el estator, adicionalmente vemos el rotor de imán permanente de dos polos.
Los motores brushless DC (BLDC) son motores síncronos que son conmutados electrónicamente,
en contraste con los motores de escobillas que realizan la conmutación de forma mecánica.
En los motores con escobillas las escobillas hacen contacto mecánico con una serie de contactos
eléctricos que se encuentran en el rotor formando un circuito eléctrico entre la fuente y los
15
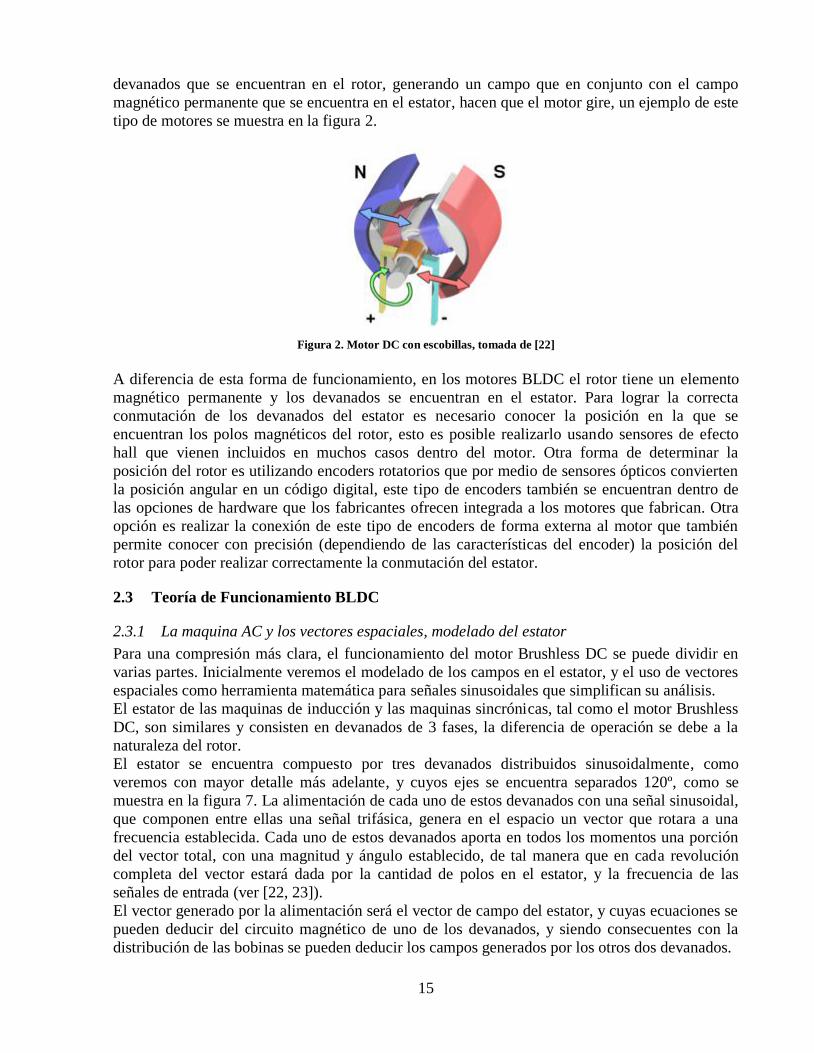
devanados que se encuentran en el rotor, generando un campo que en conjunto con el campo
magnético permanente que se encuentra en el estator, hacen que el motor gire, un ejemplo de este
tipo de motores se muestra en la figura 2.
Figura 2. Motor DC con escobillas, tomada de [22]
A diferencia de esta forma de funcionamiento, en los motores BLDC el rotor tiene un elemento
magnético permanente y los devanados se encuentran en el estator. Para lograr la correcta
conmutación de los devanados del estator es necesario conocer la posición en la que se
encuentran los polos magnéticos del rotor, esto es posible realizarlo usando sensores de efecto
hall que vienen incluidos en muchos casos dentro del motor. Otra forma de determinar la
posición del rotor es utilizando encoders rotatorios que por medio de sensores ópticos convierten
la posición angular en un código digital, este tipo de encoders también se encuentran dentro de
las opciones de hardware que los fabricantes ofrecen integrada a los motores que fabrican. Otra
opción es realizar la conexión de este tipo de encoders de forma externa al motor que también
permite conocer con precisión (dependiendo de las características del encoder) la posición del
rotor para poder realizar correctamente la conmutación del estator.
2.3 Teoría de Funcionamiento BLDC
2.3.1 La maquina AC y los vectores espaciales, modelado del estator
Para una compresión más clara, el funcionamiento del motor Brushless DC se puede dividir en
varias partes. Inicialmente veremos el modelado de los campos en el estator, y el uso de vectores
espaciales como herramienta matemática para señales sinusoidales que simplifican su análisis.
El estator de las maquinas de inducción y las maquinas sincrónicas, tal como el motor Brushless
DC, son similares y consisten en devanados de 3 fases, la diferencia de operación se debe a la
naturaleza del rotor.
El estator se encuentra compuesto por tres devanados distribuidos sinusoidalmente, como
veremos con mayor detalle más adelante, y cuyos ejes se encuentra separados 120º, como se
muestra en la figura 7. La alimentación de cada uno de estos devanados con una señal sinusoidal,
que componen entre ellas una señal trifásica, genera en el espacio un vector que rotara a una
frecuencia establecida. Cada uno de estos devanados aporta en todos los momentos una porción
del vector total, con una magnitud y ángulo establecido, de tal manera que en cada revolución
completa del vector estará dada por la cantidad de polos en el estator, y la frecuencia de las
señales de entrada (ver [22, 23]).
El vector generado por la alimentación será el vector de campo del estator, y cuyas ecuaciones se
pueden deducir del circuito magnético de uno de los devanados, y siendo consecuentes con la
distribución de las bobinas se pueden deducir los campos generados por los otros dos devanados.
16
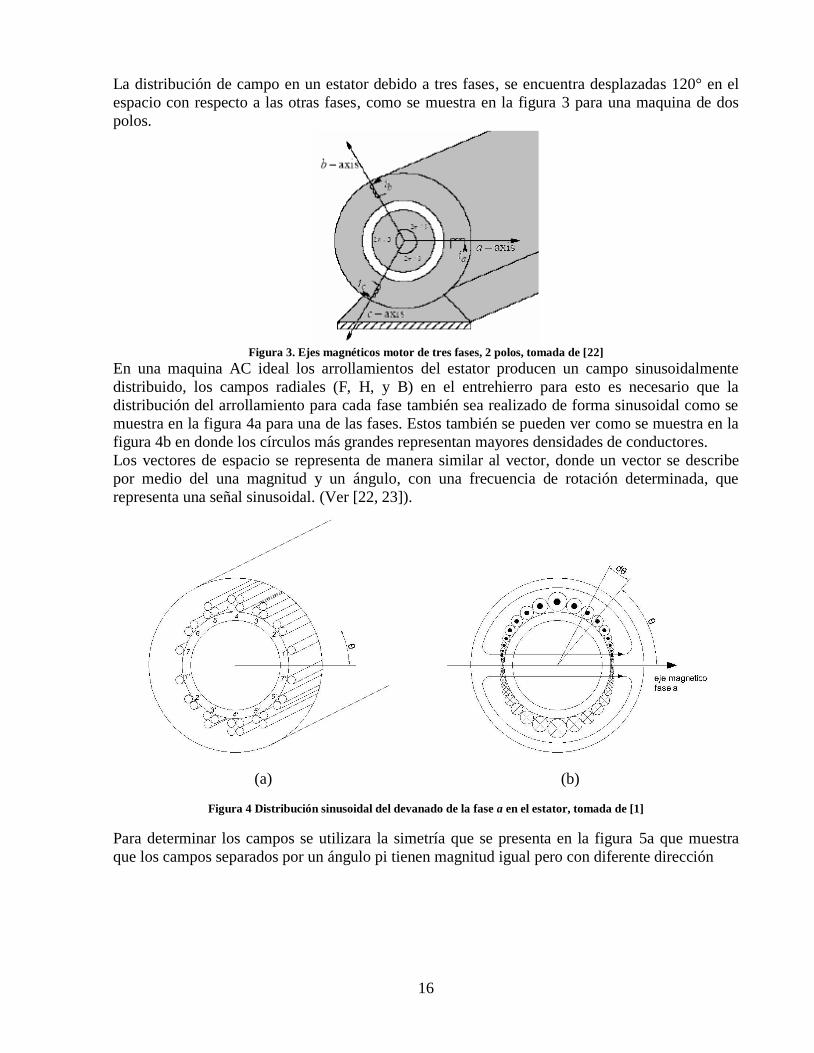
La distribución de campo en un estator debido a tres fases, se encuentra desplazadas 120° en el
espacio con respecto a las otras fases, como se muestra en la figura 3 para una maquina de dos
polos.
Figura 3. Ejes magnéticos motor de tres fases, 2 polos, tomada de [22]
En una maquina AC ideal los arrollamientos del estator producen un campo sinusoidalmente
distribuido, los campos radiales (F, H, y B) en el entrehierro para esto es necesario que la
distribución del arrollamiento para cada fase también sea realizado de forma sinusoidal como se
muestra en la figura 4a para una de las fases. Estos también se pueden ver como se muestra en la
figura 4b en donde los círculos más grandes representan mayores densidades de conductores.
Los vectores de espacio se representa de manera similar al vector, donde un vector se describe
por medio del una magnitud y un ángulo, con una frecuencia de rotación determinada, que
representa una señal sinusoidal. (Ver [22, 23]).
(a) (b)
Figura 4 Distribución sinusoidal del devanado de la fase a en el estator, tomada de [1]
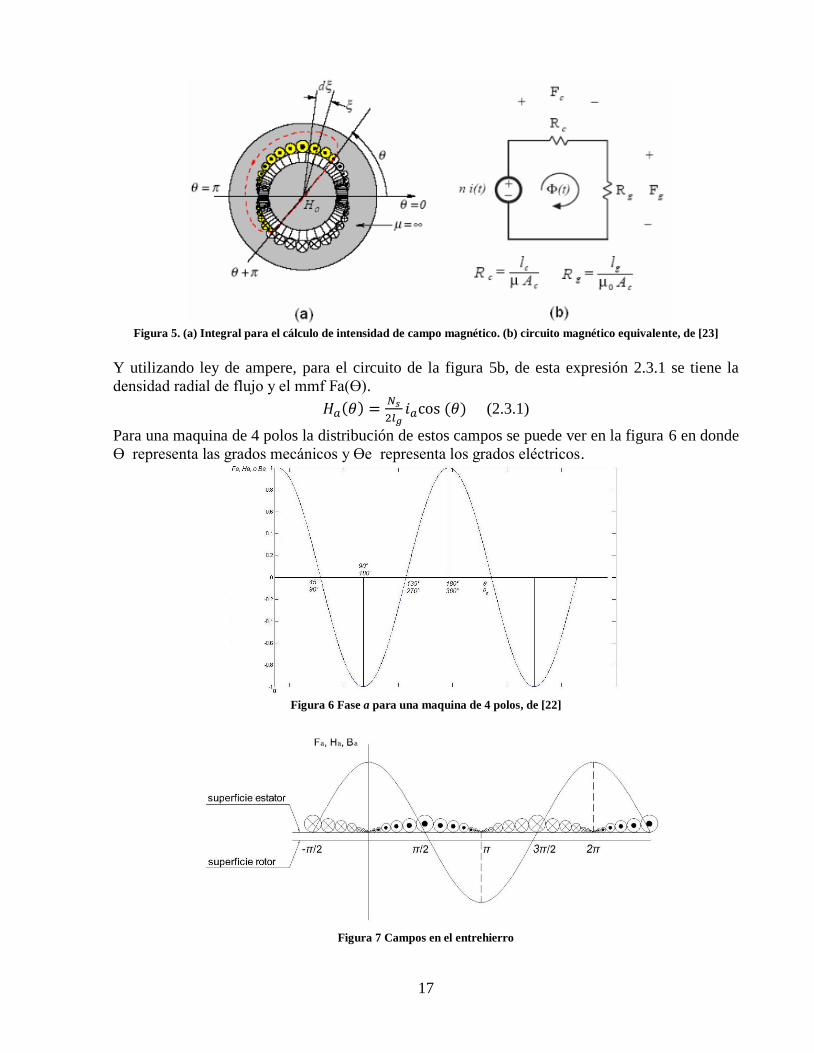
Para determinar los campos se utilizara la simetría que se presenta en la figura 5a que muestra
que los campos separados por un ángulo pi tienen magnitud igual pero con diferente dirección
17
Figura 5. (a) Integral para el cálculo de intensidad de campo magnético. (b) circuito magnético equivalente, de [23]
Y utilizando ley de ampere, para el circuito de la figura 5b, de esta expresión 2.3.1 se tiene la
densidad radial de flujo y el mmf Fa(Ɵ).
(2.3.1)
Para una maquina de 4 polos la distribución de estos campos se puede ver en la figura 6 en donde
Ɵ representa las grados mecánicos y Ɵe representa los grados eléctricos.
Figura 6 Fase a para una maquina de 4 polos, de [22]
Figura 7 Campos en el entrehierro
18
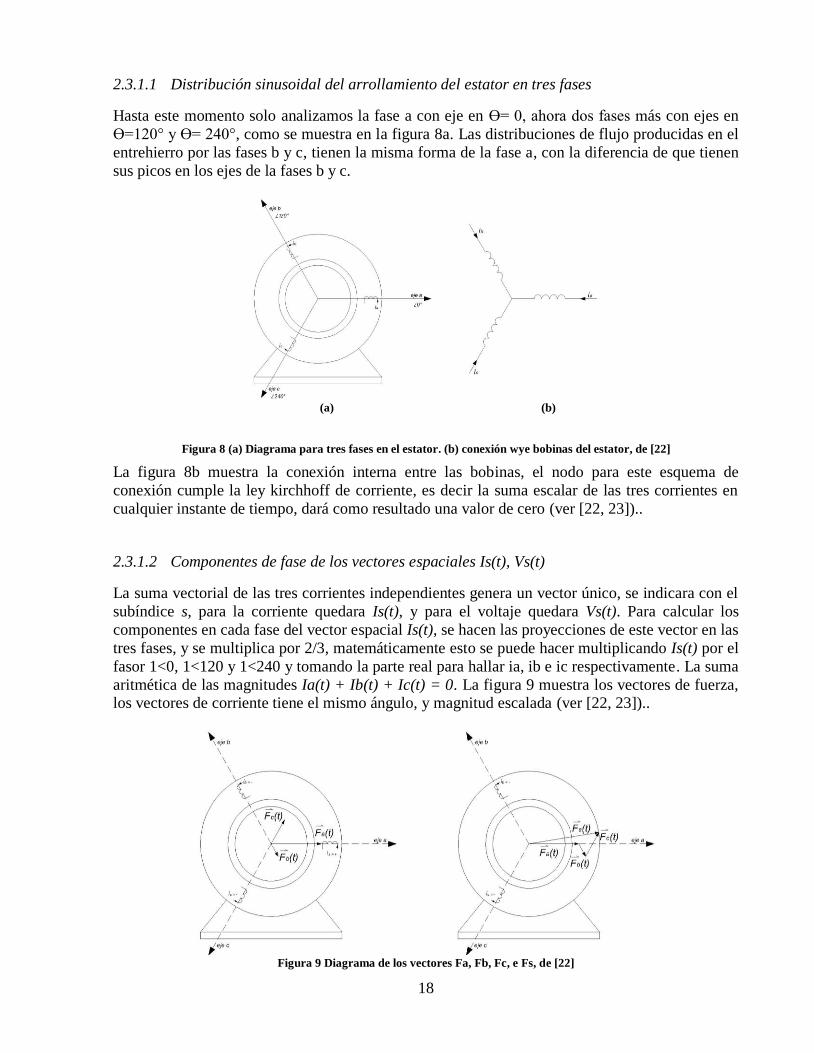
2.3.1.1 Distribución sinusoidal del arrollamiento del estator en tres fases
Hasta este momento solo analizamos la fase a con eje en Ɵ= 0, ahora dos fases más con ejes en
Ɵ=120° y Ɵ= 240°, como se muestra en la figura 8a. Las distribuciones de flujo producidas en el
entrehierro por las fases b y c, tienen la misma forma de la fase a, con la diferencia de que tienen
sus picos en los ejes de la fases b y c.
(a) (b)
Figura 8 (a) Diagrama para tres fases en el estator. (b) conexión wye bobinas del estator, de [22]
La figura 8b muestra la conexión interna entre las bobinas, el nodo para este esquema de
conexión cumple la ley kirchhoff de corriente, es decir la suma escalar de las tres corrientes en
cualquier instante de tiempo, dará como resultado una valor de cero (ver [22, 23])..
2.3.1.2 Componentes de fase de los vectores espaciales Is(t), Vs(t)
La suma vectorial de las tres corrientes independientes genera un vector único, se indicara con el
subíndice s, para la corriente quedara Is(t), y para el voltaje quedara Vs(t). Para calcular los
componentes en cada fase del vector espacial Is(t), se hacen las proyecciones de este vector en las
tres fases, y se multiplica por 2/3, matemáticamente esto se puede hacer multiplicando Is(t) por el
fasor 1<0, 1<120 y 1<240 y tomando la parte real para hallar ia, ib e ic respectivamente. La suma
aritmética de las magnitudes Ia(t) + Ib(t) + Ic(t) = 0. La figura 9 muestra los vectores de fuerza, los vectores de corriente tiene el mismo ángulo, y magnitud escalada (ver [22, 23])..
Figura 9 Diagrama de los vectores Fa, Fb, Fc, e Fs, de [22]
19
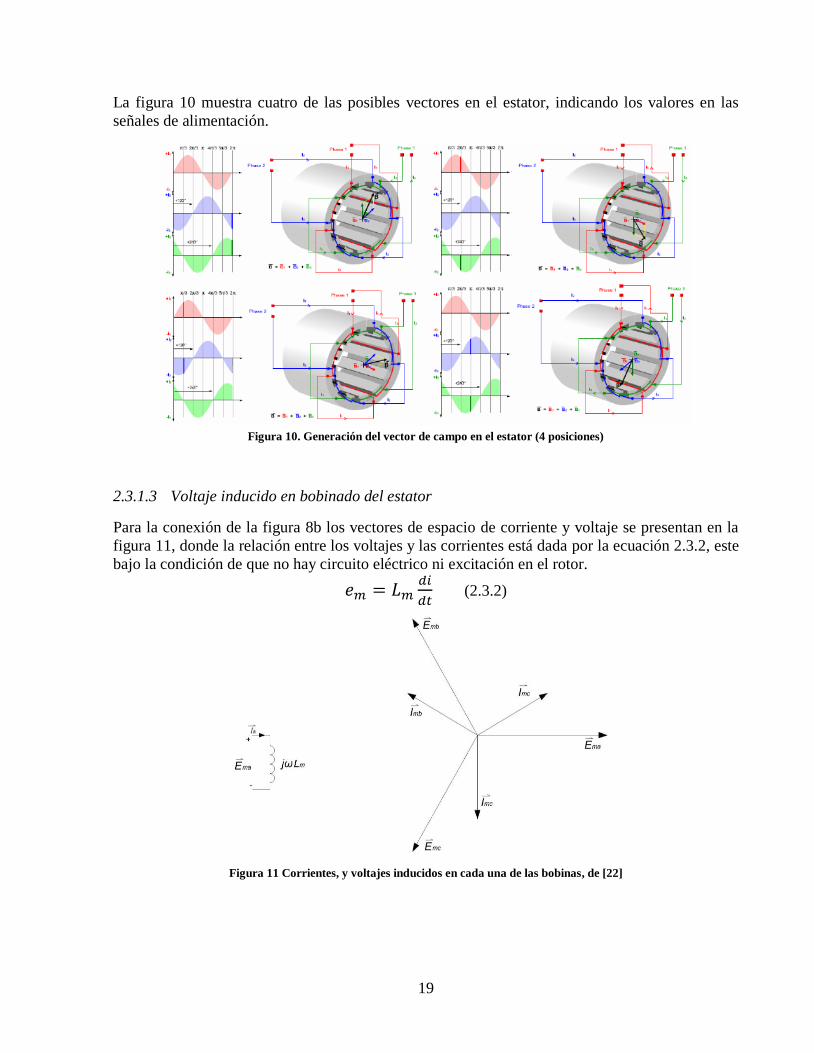
La figura 10 muestra cuatro de las posibles vectores en el estator, indicando los valores en las
señales de alimentación.
Figura 10. Generación del vector de campo en el estator (4 posiciones)
2.3.1.3 Voltaje inducido en bobinado del estator
Para la conexión de la figura 8b los vectores de espacio de corriente y voltaje se presentan en la
figura 11, donde la relación entre los voltajes y las corrientes está dada por la ecuación 2.3.2, este
bajo la condición de que no hay circuito eléctrico ni excitación en el rotor.
(2.3.2)
Figura 11 Corrientes, y voltajes inducidos en cada una de las bobinas, de [22]
20
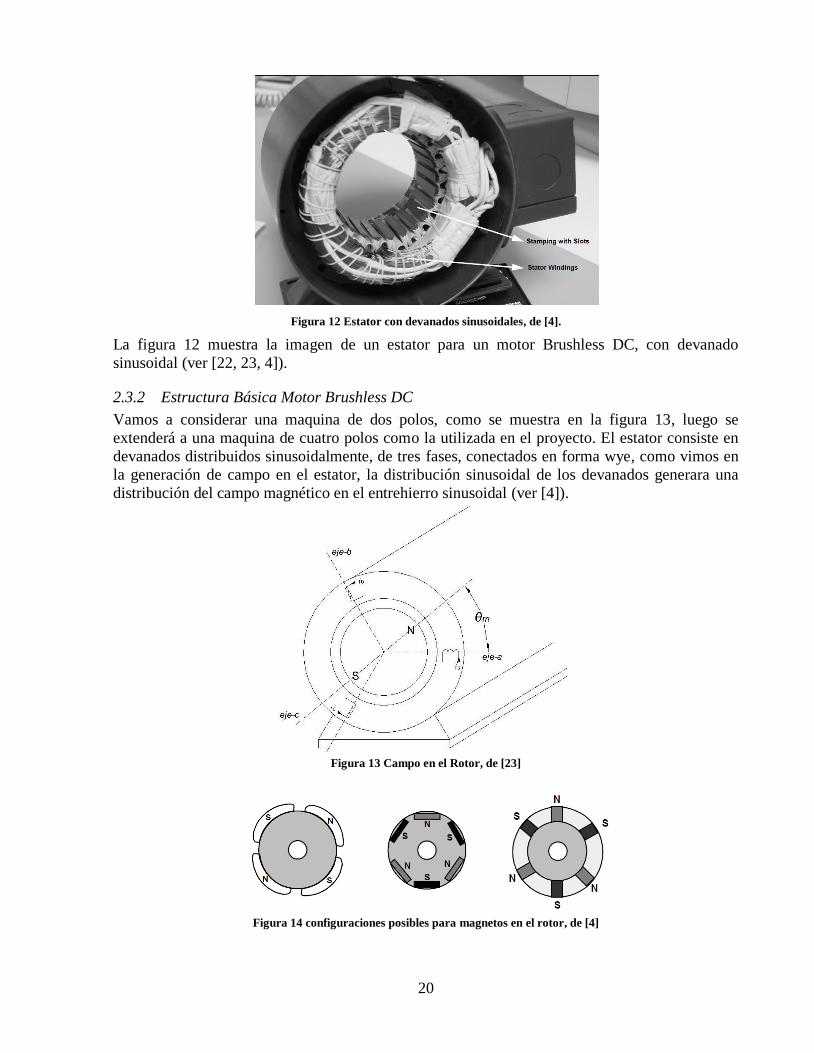
Figura 12 Estator con devanados sinusoidales, de [4].
La figura 12 muestra la imagen de un estator para un motor Brushless DC, con devanado
sinusoidal (ver [22, 23, 4]).
2.3.2 Estructura Básica Motor Brushless DC
Vamos a considerar una maquina de dos polos, como se muestra en la figura 13, luego se
extenderá a una maquina de cuatro polos como la utilizada en el proyecto. El estator consiste en
devanados distribuidos sinusoidalmente, de tres fases, conectados en forma wye, como vimos en
la generación de campo en el estator, la distribución sinusoidal de los devanados generara una
distribución del campo magnético en el entrehierro sinusoidal (ver [4]).
Figura 13 Campo en el Rotor, de [23]
Figura 14 configuraciones posibles para magnetos en el rotor, de [4]
21
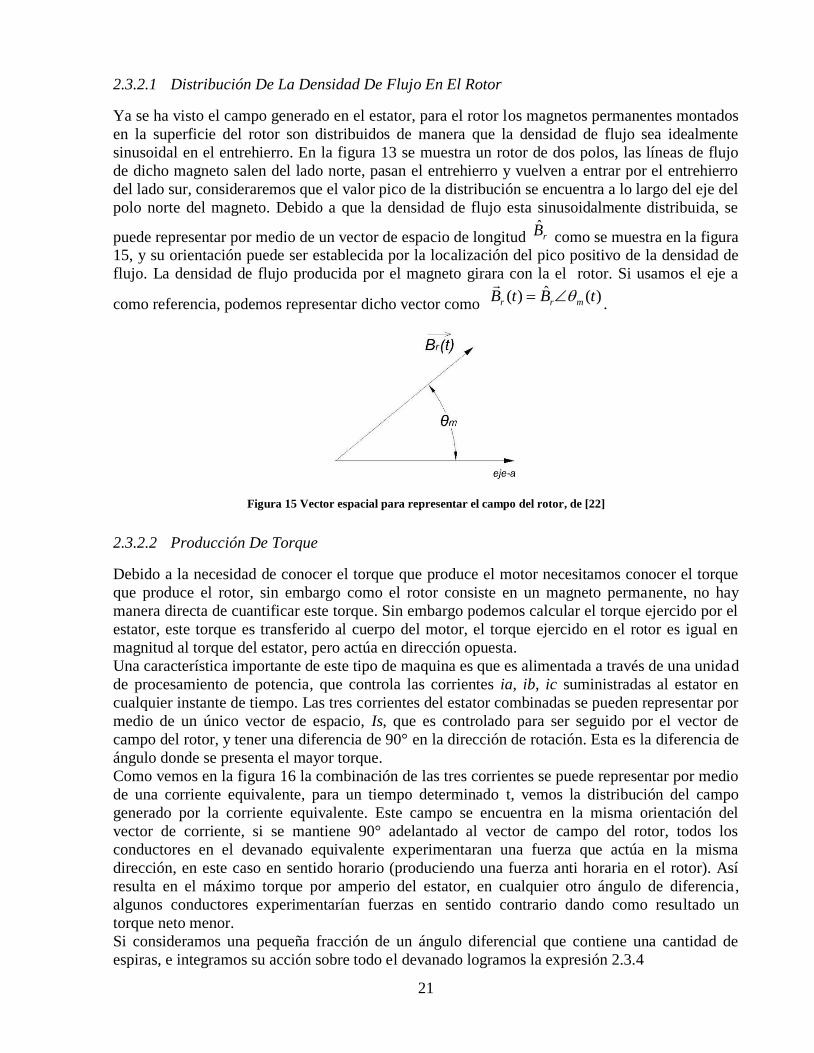
2.3.2.1 Distribución De La Densidad De Flujo En El Rotor
Ya se ha visto el campo generado en el estator, para el rotor los magnetos permanentes montados
en la superficie del rotor son distribuidos de manera que la densidad de flujo sea idealmente
sinusoidal en el entrehierro. En la figura 13 se muestra un rotor de dos polos, las líneas de flujo
de dicho magneto salen del lado norte, pasan el entrehierro y vuelven a entrar por el entrehierro
del lado sur, consideraremos que el valor pico de la distribución se encuentra a lo largo del eje del
polo norte del magneto. Debido a que la densidad de flujo esta sinusoidalmente distribuida, se
puede representar por medio de un vector de espacio de longitud rB̂ como se muestra en la figura 15, y su orientación puede ser establecida por la localización del pico positivo de la densidad de
flujo. La densidad de flujo producida por el magneto girara con la el rotor. Si usamos el eje a
como referencia, podemos representar dicho vector como )(ˆ)( tBtB mrr
.
Figura 15 Vector espacial para representar el campo del rotor, de [22]
2.3.2.2 Producción De Torque
Debido a la necesidad de conocer el torque que produce el motor necesitamos conocer el torque
que produce el rotor, sin embargo como el rotor consiste en un magneto permanente, no hay
manera directa de cuantificar este torque. Sin embargo podemos calcular el torque ejercido por el
estator, este torque es transferido al cuerpo del motor, el torque ejercido en el rotor es igual en
magnitud al torque del estator, pero actúa en dirección opuesta.
Una característica importante de este tipo de maquina es que es alimentada a través de una unidad
de procesamiento de potencia, que controla las corrientes ia, ib, ic suministradas al estator en
cualquier instante de tiempo. Las tres corrientes del estator combinadas se pueden representar por
medio de un único vector de espacio, Is, que es controlado para ser seguido por el vector de
campo del rotor, y tener una diferencia de 90° en la dirección de rotación. Esta es la diferencia de
ángulo donde se presenta el mayor torque.
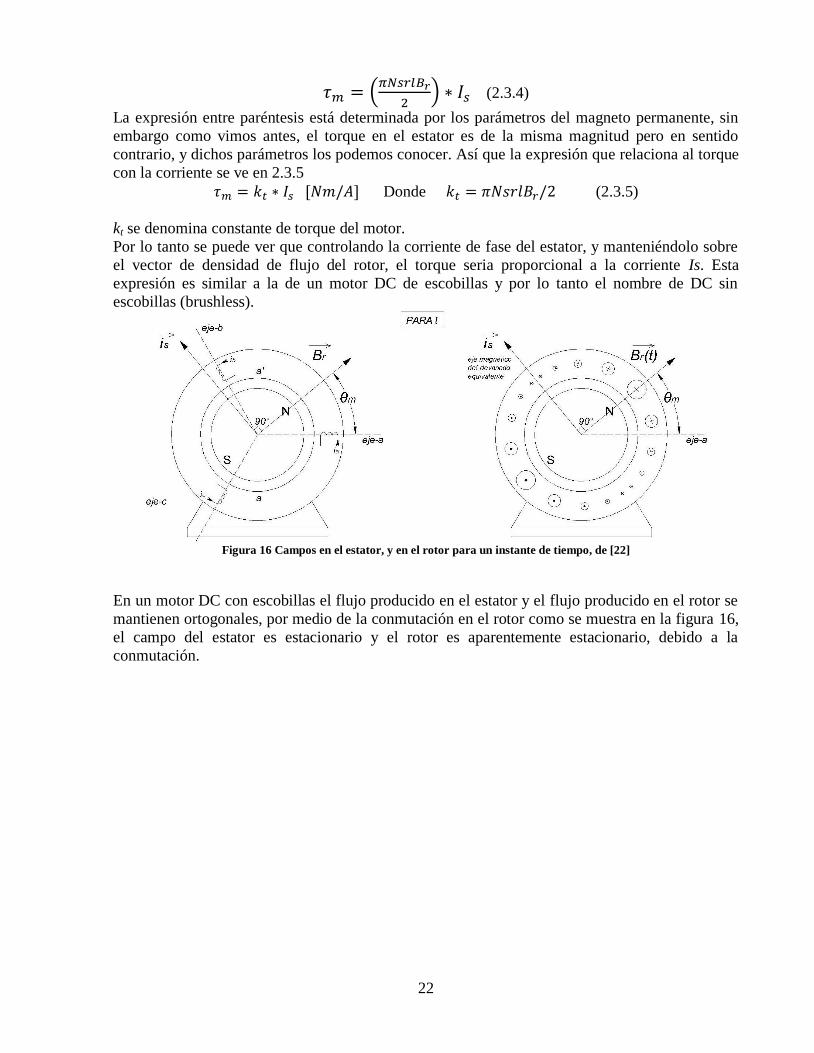
Como vemos en la figura 16 la combinación de las tres corrientes se puede representar por medio
de una corriente equivalente, para un tiempo determinado t, vemos la distribución del campo
generado por la corriente equivalente. Este campo se encuentra en la misma orientación del
vector de corriente, si se mantiene 90° adelantado al vector de campo del rotor, todos los
conductores en el devanado equivalente experimentaran una fuerza que actúa en la misma
dirección, en este caso en sentido horario (produciendo una fuerza anti horaria en el rotor). Así
resulta en el máximo torque por amperio del estator, en cualquier otro ángulo de diferencia,
algunos conductores experimentarían fuerzas en sentido contrario dando como resultado un
torque neto menor.
Si consideramos una pequeña fracción de un ángulo diferencial que contiene una cantidad de
espiras, e integramos su acción sobre todo el devanado logramos la expresión 2.3.4
22
(2.3.4)
La expresión entre paréntesis está determinada por los parámetros del magneto permanente, sin
embargo como vimos antes, el torque en el estator es de la misma magnitud pero en sentido
contrario, y dichos parámetros los podemos conocer. Así que la expresión que relaciona al torque
con la corriente se ve en 2.3.5
Donde (2.3.5)
kt se denomina constante de torque del motor.
Por lo tanto se puede ver que controlando la corriente de fase del estator, y manteniéndolo sobre
el vector de densidad de flujo del rotor, el torque seria proporcional a la corriente Is. Esta
expresión es similar a la de un motor DC de escobillas y por lo tanto el nombre de DC sin
escobillas (brushless).
Figura 16 Campos en el estator, y en el rotor para un instante de tiempo, de [22]
En un motor DC con escobillas el flujo producido en el estator y el flujo producido en el rotor se
mantienen ortogonales, por medio de la conmutación en el rotor como se muestra en la figura 16,
el campo del estator es estacionario y el rotor es aparentemente estacionario, debido a la
conmutación.
23
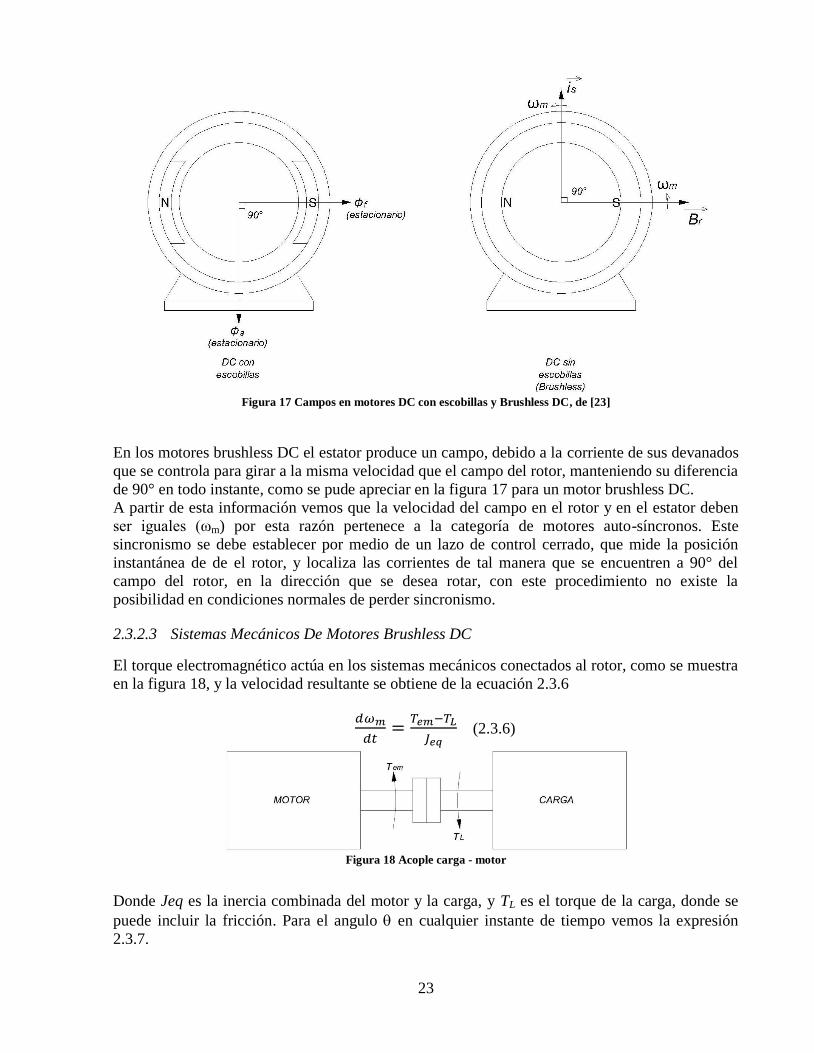
Figura 17 Campos en motores DC con escobillas y Brushless DC, de [23]
En los motores brushless DC el estator produce un campo, debido a la corriente de sus devanados
que se controla para girar a la misma velocidad que el campo del rotor, manteniendo su diferencia
de 90° en todo instante, como se pude apreciar en la figura 17 para un motor brushless DC.
A partir de esta información vemos que la velocidad del campo en el rotor y en el estator deben
ser iguales (ωm) por esta razón pertenece a la categoría de motores auto-síncronos. Este
sincronismo se debe establecer por medio de un lazo de control cerrado, que mide la posición
instantánea de de el rotor, y localiza las corrientes de tal manera que se encuentren a 90° del
campo del rotor, en la dirección que se desea rotar, con este procedimiento no existe la
posibilidad en condiciones normales de perder sincronismo.
2.3.2.3 Sistemas Mecánicos De Motores Brushless DC
El torque electromagnético actúa en los sistemas mecánicos conectados al rotor, como se muestra
en la figura 18, y la velocidad resultante se obtiene de la ecuación 2.3.6
(2.3.6)
Figura 18 Acople carga - motor
Donde Jeq es la inercia combinada del motor y la carga, y TL es el torque de la carga, donde se
puede incluir la fricción. Para el angulo en cualquier instante de tiempo vemos la expresión
2.3.7.

24
(2.3.7)
Donde )0(m es la posición del rotor para t=0, y τ es la variable de integración.
2.3.2.4 Calculo De Los Valores De Referencia Ia*(t), Ib*(t), Y Ic*(t) De Las Corrientes De
Estator
El controlador es responsable de controlar el torque, la velocidad, o la posición del sistema
mecánico, para esto necesitamos calcular los valores deseados o referencias. Para la corriente
usamos un valor deseado de torque, y por medio de la siguiente ecuación hallamos el valor de
corriente, ecuacion 2.3.8.
(2.3.8)
Donde kt es la constante de torque del motor dado en las especificaciones.
Por medio de un encoder incremental determinamos la posición, y podemos formar el vector de
corriente
)()(ˆ)( ***ttIti
siss
(2.3.9)
Donde
2)(2)(*
tt mis (2.3.10)
Para una maquina de 4 polos.
Donde )(tm es el ángulo mecánico. Para los valores instantáneos de las corrientes de las tres
fases del estator usamos las ecuaciones son las siguientes
))(cos()(3
2)]([
3
2)( **** ttItiti
sissa
(2.3.11)
)3
2)(cos()(
3
2
3
2)(
3
2)( ****
ttItiti
sissb
(2.3.12)
)3
4)(cos()(
3
2
3
4)(
3
2)( ****
ttItiti
sissc
(2.3.13)
Estas ecuaciones muestran que en un estado estable sinusoidal balanceado, las corrientes tienen
una amplitud constante *ˆsI, y varían sinusoidalmente con el ángulo
*
si
que a su vez varia
continuamente con t, y la velocidad m.
2.3.2.5 Fuerza Electromotriz Inducida En Los Devanados Durante Estado Estable Sinusoidal
Balanceado
En los devanados del estator las fuerzas electromagnéticas se deben principalmente a dos
densidades de flujo:
Debido a que el rotor gira con una velocidad instantánea )(tm , como se muestra en la figura 17,
el vector de campo )(tBr
rota a la misma velocidad, y dado su naturaleza de magnetismo
25
permanente, inducirá en los devanados del estator una fuerza electromotriz denominada back-
emf.
Las corrientes de las fases en los devanados del estator en un estado estable sinusoidal
balanceado producen una distribución de flujo debido a la rotación del vector de corriente )(tis
de alimentación del motor. Este induce una fuerza electromotriz en los devanados del estator.
Despreciando la saturación en un circuito magnético, las fuerzas electromotrices debido a las dos
causas anteriores, las podemos analizar por separado, y utilizando la técnica de superposición
podemos ver la fuerza electromotriz resultante.
2.3.2.6 Inducción En Los Devanados Del Estator Debido A La Rotación de )(tBr
.
Consideraremos que el vector )(tBr
esta rotando a una velocidad instantánea m con respecto a
los devanados, y como vimos con antelación la fuerza electromotriz inducida debido a un campo
magnético se modela como:
)()2
(2
3)( tB
Nrjte r
smrBms
(2.3.14)
Podemos definir una constante de voltaje ke, igual a la constante de torque:
rs
e BN
rA
Nmk
srad
Vk
T
ˆ2/
(2.3.15)
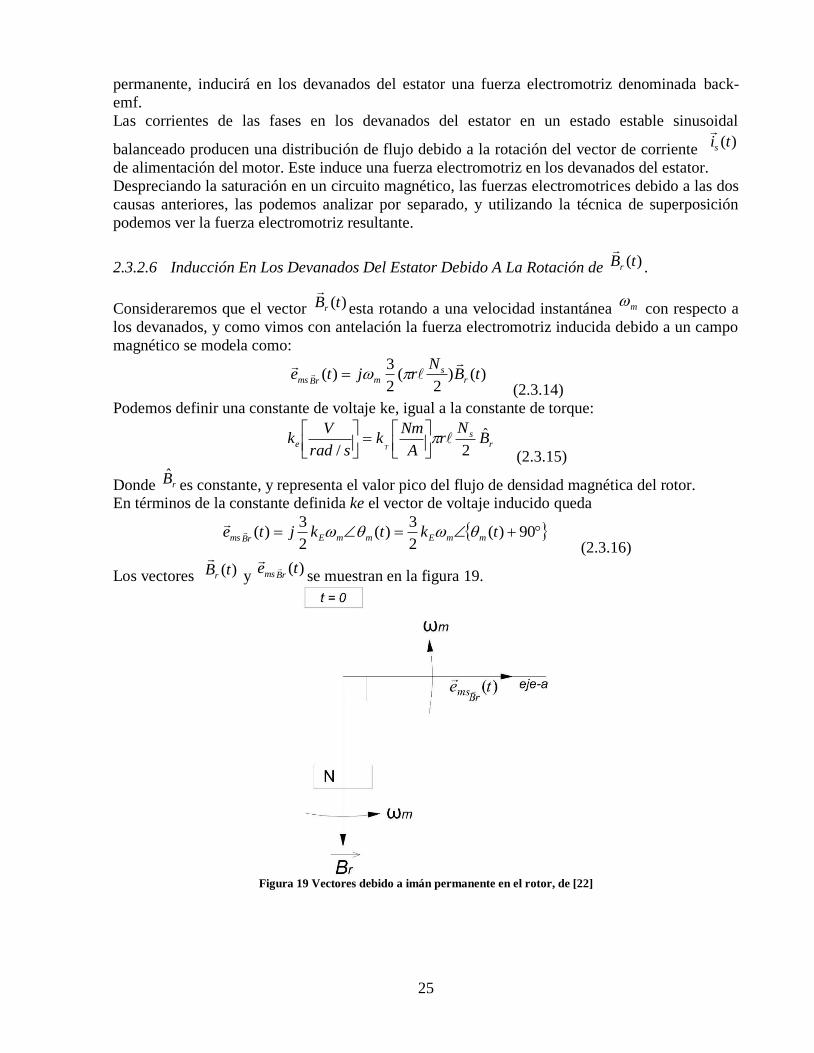
Donde rB̂ es constante, y representa el valor pico del flujo de densidad magnética del rotor. En términos de la constante definida ke el vector de voltaje inducido queda
90)(2
3)(
2
3)( tktkjte mmEmmErBms
(2.3.16)
Los vectores )(tBr
y )(te
rBms
se muestran en la figura 19.
Figura 19 Vectores debido a imán permanente en el rotor, de [22]

26
2.3.2.7 Inducción En Los Devanados Del Estator Debido A La Rotación De )(tis
.
Adicionalmente al campo generad en el entre hierro por la rotación del magneto permanente en el
rotor, se establece un campo por la rotación del vector de corriente )(tis
en el estator, como vemos en la figura 20, el vector de corriente estará 90° adelante del campo del rotor.
Debido a la rotación de )(tis
, el voltaje inducido en el estator se puede escribir como
)()( tiLjte smmsims
(2.3.16)
Estos vectores )(tis
, y )(te
sims
se muestran en la figura 20, para un tiempo t=0.
Figura 20 Campos debido a Is, de [22]
2.3.2.8 Superposición De Campos Inducidos
Los campos vistos anteriormente se presentan simultáneamente, por lo tanto dichos campos se
deben superponer para hallar el campo resultante, cuya representación sería
)()()( tetetesimsrBmsms
(2.3.17)
Sustituyendo los resultados anteriores
)(90)(2
3)( tiLjtkte smmmmEms
(2.3.18)
En el diagrama vectorial de la figura 21 veremos los tres campos, el resultante y sus
conformantes para un tiempo t=0. La ecuación del vector de la fase a, corresponde al vector
2.3.19, este vector es de una magnitud 3/2 menor al vector resultante de la combinación de las
tres fases, pero con la misma orientación.
)(90)()( tiLjtktE ammmmEma
(2.3.19)
27
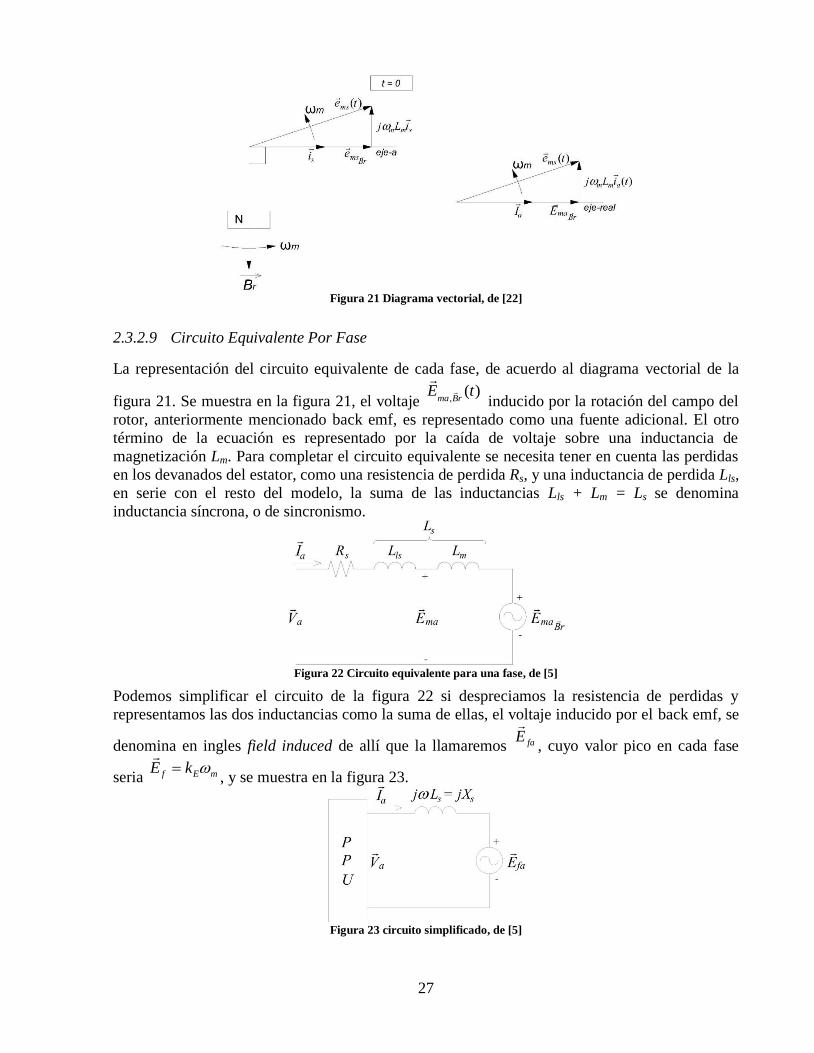
Figura 21 Diagrama vectorial, de [22]
2.3.2.9 Circuito Equivalente Por Fase
La representación del circuito equivalente de cada fase, de acuerdo al diagrama vectorial de la
figura 21. Se muestra en la figura 21, el voltaje )(
,tE
rBma
inducido por la rotación del campo del
rotor, anteriormente mencionado back emf, es representado como una fuente adicional. El otro
término de la ecuación es representado por la caída de voltaje sobre una inductancia de
magnetización Lm. Para completar el circuito equivalente se necesita tener en cuenta las perdidas
en los devanados del estator, como una resistencia de perdida Rs, y una inductancia de perdida Lls,
en serie con el resto del modelo, la suma de las inductancias Lls + Lm = Ls se denomina
inductancia síncrona, o de sincronismo.
Figura 22 Circuito equivalente para una fase, de [5]
Podemos simplificar el circuito de la figura 22 si despreciamos la resistencia de perdidas y
representamos las dos inductancias como la suma de ellas, el voltaje inducido por el back emf, se
denomina en ingles field induced de allí que la llamaremos faE
, cuyo valor pico en cada fase
seria mEf kE
, y se muestra en la figura 23.
Figura 23 circuito simplificado, de [5]
28
La unidad de procesamiento de potencia suministrara el voltaje asmfaa ILjEV
, de la fase a.
Podemos ver que las fases están interrelacionadas, y suponiendo que los parámetros de
fabricación son lo suficientemente cercanos para considerarlos iguales, si controlamos la
corriente de una fase controlamos todas las fases del motor.
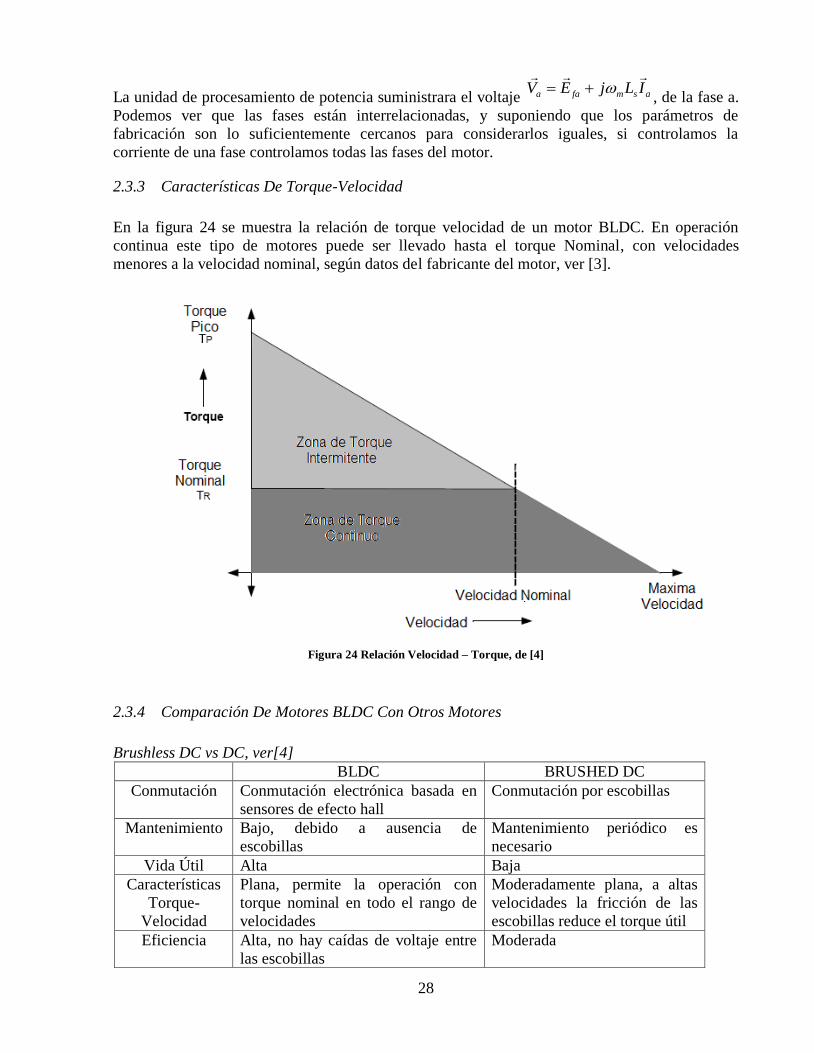
2.3.3 Características De Torque-Velocidad
En la figura 24 se muestra la relación de torque velocidad de un motor BLDC. En operación
continua este tipo de motores puede ser llevado hasta el torque Nominal, con velocidades
menores a la velocidad nominal, según datos del fabricante del motor, ver [3].
Figura 24 Relación Velocidad – Torque, de [4]
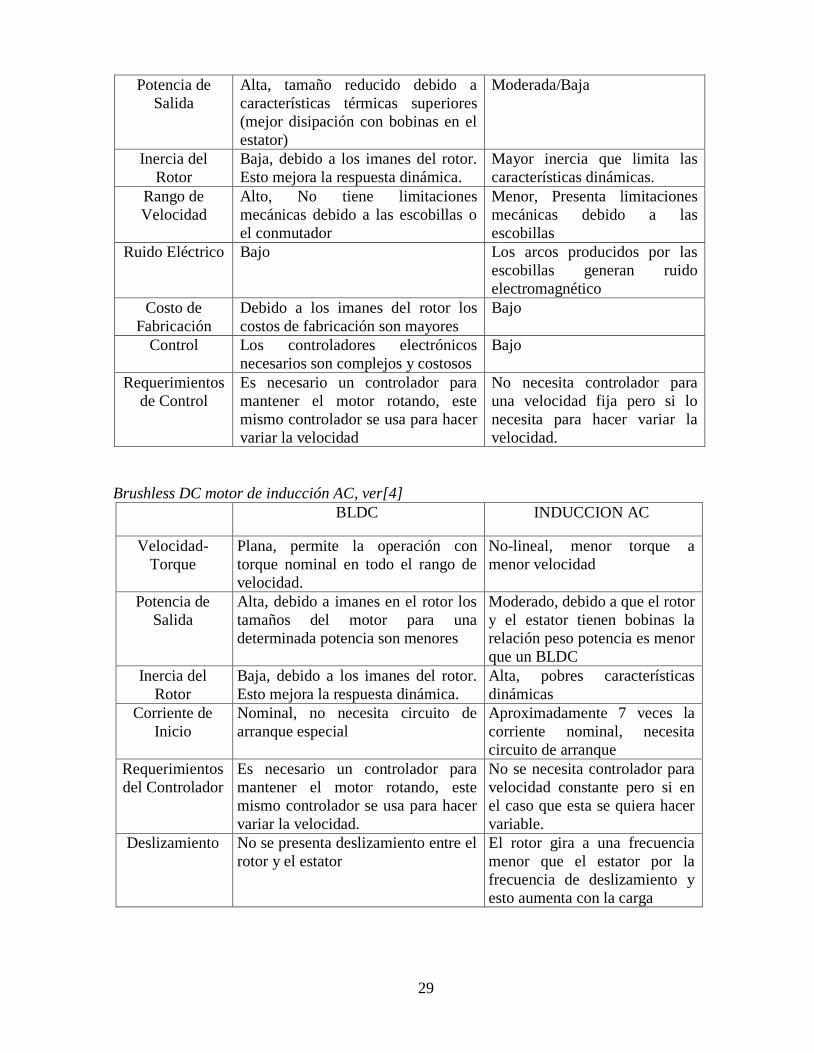
2.3.4 Comparación De Motores BLDC Con Otros Motores
Brushless DC vs DC, ver[4]
BLDC BRUSHED DC
Conmutación Conmutación electrónica basada en
sensores de efecto hall
Conmutación por escobillas
Mantenimiento Bajo, debido a ausencia de
escobillas
Mantenimiento periódico es
necesario
Vida Útil Alta Baja
Características
Torque-
Velocidad
Plana, permite la operación con
torque nominal en todo el rango de
velocidades
Moderadamente plana, a altas
velocidades la fricción de las
escobillas reduce el torque útil
Eficiencia Alta, no hay caídas de voltaje entre
las escobillas
Moderada
29
Potencia de
Salida
Alta, tamaño reducido debido a
características térmicas superiores
(mejor disipación con bobinas en el
estator)
Moderada/Baja
Inercia del
Rotor
Baja, debido a los imanes del rotor.
Esto mejora la respuesta dinámica.
Mayor inercia que limita las
características dinámicas.
Rango de
Velocidad
Alto, No tiene limitaciones
mecánicas debido a las escobillas o
el conmutador
Menor, Presenta limitaciones
mecánicas debido a las
escobillas
Ruido Eléctrico Bajo Los arcos producidos por las
escobillas generan ruido
electromagnético
Costo de
Fabricación
Debido a los imanes del rotor los
costos de fabricación son mayores
Bajo
Control Los controladores electrónicos
necesarios son complejos y costosos
Bajo
Requerimientos
de Control
Es necesario un controlador para
mantener el motor rotando, este
mismo controlador se usa para hacer
variar la velocidad
No necesita controlador para
una velocidad fija pero si lo
necesita para hacer variar la
velocidad.
Brushless DC motor de inducción AC, ver[4]
BLDC INDUCCION AC
Velocidad-
Torque
Plana, permite la operación con
torque nominal en todo el rango de
velocidad.
No-lineal, menor torque a
menor velocidad
Potencia de
Salida
Alta, debido a imanes en el rotor los
tamaños del motor para una
determinada potencia son menores
Moderado, debido a que el rotor
y el estator tienen bobinas la
relación peso potencia es menor
que un BLDC
Inercia del
Rotor
Baja, debido a los imanes del rotor.
Esto mejora la respuesta dinámica.
Alta, pobres características
dinámicas
Corriente de
Inicio
Nominal, no necesita circuito de
arranque especial
Aproximadamente 7 veces la
corriente nominal, necesita
circuito de arranque
Requerimientos
del Controlador
Es necesario un controlador para
mantener el motor rotando, este
mismo controlador se usa para hacer
variar la velocidad.
No se necesita controlador para
velocidad constante pero si en
el caso que esta se quiera hacer
variable.
Deslizamiento No se presenta deslizamiento entre el
rotor y el estator
El rotor gira a una frecuencia
menor que el estator por la
frecuencia de deslizamiento y
esto aumenta con la carga
30
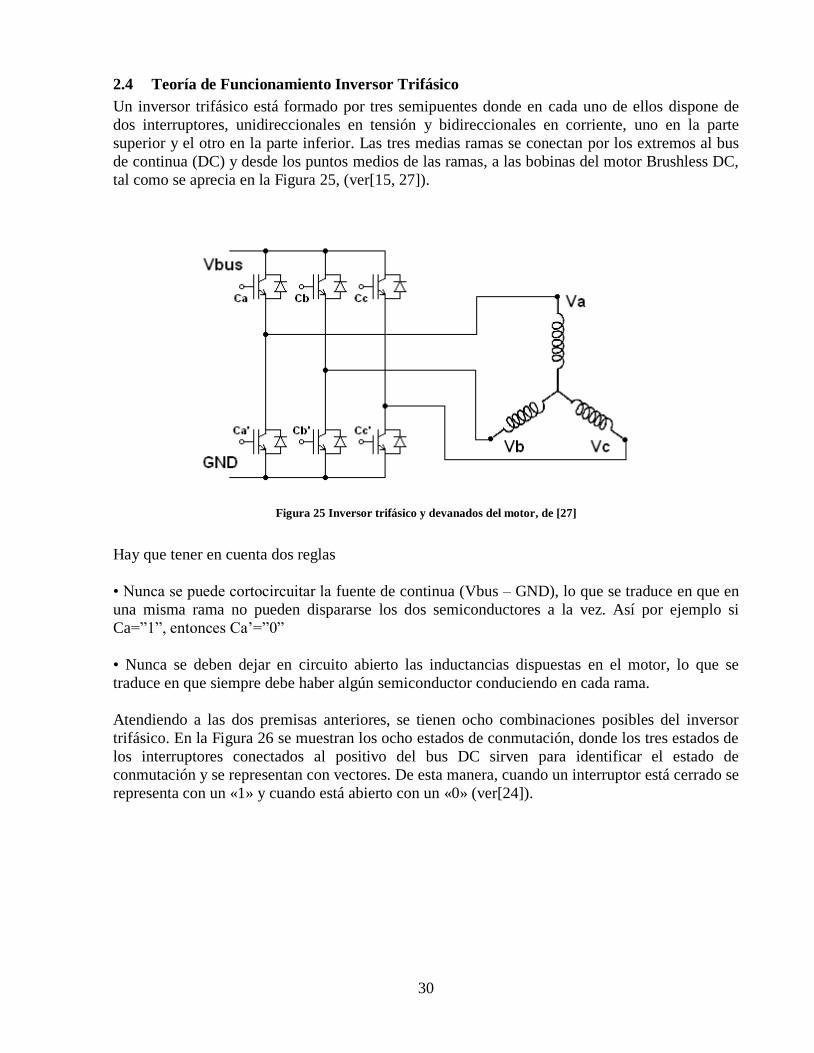
2.4 Teoría de Funcionamiento Inversor Trifásico
Un inversor trifásico está formado por tres semipuentes donde en cada uno de ellos dispone de
dos interruptores, unidireccionales en tensión y bidireccionales en corriente, uno en la parte
superior y el otro en la parte inferior. Las tres medias ramas se conectan por los extremos al bus
de continua (DC) y desde los puntos medios de las ramas, a las bobinas del motor Brushless DC,
tal como se aprecia en la Figura 25, (ver[15, 27]).
Figura 25 Inversor trifásico y devanados del motor, de [27]
Hay que tener en cuenta dos reglas
• Nunca se puede cortocircuitar la fuente de continua (Vbus – GND), lo que se traduce en que en
una misma rama no pueden dispararse los dos semiconductores a la vez. Así por ejemplo si
Ca=”1”, entonces Ca’=”0”
• Nunca se deben dejar en circuito abierto las inductancias dispuestas en el motor, lo que se
traduce en que siempre debe haber algún semiconductor conduciendo en cada rama.
Atendiendo a las dos premisas anteriores, se tienen ocho combinaciones posibles del inversor
trifásico. En la Figura 26 se muestran los ocho estados de conmutación, donde los tres estados de
los interruptores conectados al positivo del bus DC sirven para identificar el estado de
conmutación y se representan con vectores. De esta manera, cuando un interruptor está cerrado se
representa con un «1» y cuando está abierto con un «0» (ver[24]).
31
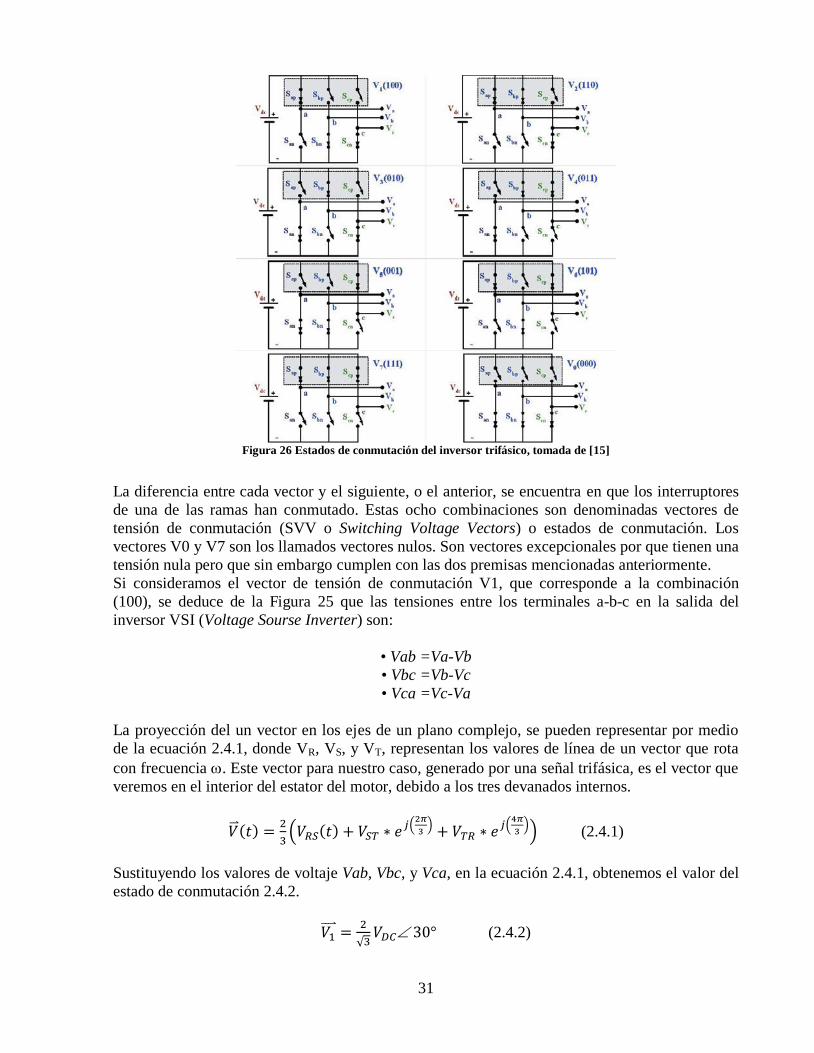
Figura 26 Estados de conmutación del inversor trifásico, tomada de [15]
La diferencia entre cada vector y el siguiente, o el anterior, se encuentra en que los interruptores
de una de las ramas han conmutado. Estas ocho combinaciones son denominadas vectores de
tensión de conmutación (SVV o Switching Voltage Vectors) o estados de conmutación. Los
vectores V0 y V7 son los llamados vectores nulos. Son vectores excepcionales por que tienen una
tensión nula pero que sin embargo cumplen con las dos premisas mencionadas anteriormente.
Si consideramos el vector de tensión de conmutación V1, que corresponde a la combinación
(100), se deduce de la Figura 25 que las tensiones entre los terminales a-b-c en la salida del
inversor VSI (Voltage Sourse Inverter) son:
• Vab =Va-Vb
• Vbc =Vb-Vc
• Vca =Vc-Va
La proyección del un vector en los ejes de un plano complejo, se pueden representar por medio
de la ecuación 2.4.1, donde VR, VS, y VT, representan los valores de línea de un vector que rota
con frecuencia . Este vector para nuestro caso, generado por una señal trifásica, es el vector que
veremos en el interior del estator del motor, debido a los tres devanados internos.
(2.4.1)
Sustituyendo los valores de voltaje Vab, Vbc, y Vca, en la ecuación 2.4.1, obtenemos el valor del
estado de conmutación 2.4.2.
(2.4.2)
32
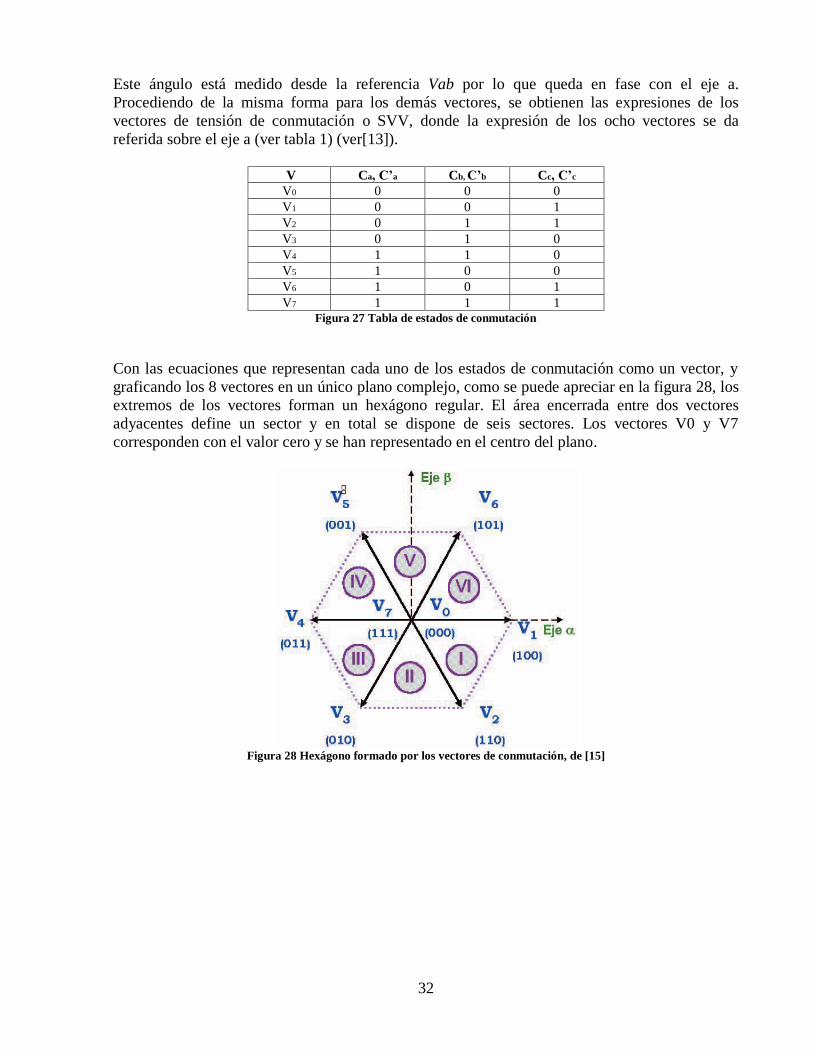
Este ángulo está medido desde la referencia Vab por lo que queda en fase con el eje a.
Procediendo de la misma forma para los demás vectores, se obtienen las expresiones de los
vectores de tensión de conmutación o SVV, donde la expresión de los ocho vectores se da
referida sobre el eje a (ver tabla 1) (ver[13]).
V Ca, C’a Cb, C’b Cc, C’c
V0 0 0 0
V1 0 0 1
V2 0 1 1
V3 0 1 0
V4 1 1 0
V5 1 0 0
V6 1 0 1
V7 1 1 1 Figura 27 Tabla de estados de conmutación
Con las ecuaciones que representan cada uno de los estados de conmutación como un vector, y
graficando los 8 vectores en un único plano complejo, como se puede apreciar en la figura 28, los
extremos de los vectores forman un hexágono regular. El área encerrada entre dos vectores
adyacentes define un sector y en total se dispone de seis sectores. Los vectores V0 y V7
corresponden con el valor cero y se han representado en el centro del plano.
Figura 28 Hexágono formado por los vectores de conmutación, de [15]
33
2.5 Space Vector Pulse Width Modulation (SVPWM)
Una de las técnicas más utilizadas es la modulación por ancho de pulso (PWM) con sus múltiples
variantes, un único pulso por semiperiodo, varios pulsos por semiperiodo, varios pulsos
sinusoidales, etc. Tiene como principal ventaja la sencillez en su implementación, pero como
desventaja, no se adaptan bien a la respuesta dinámica en cargas no lineales y poseen elevadas
pérdidas por conmutación que se producen cuando se requiere una distorsión armónica total
(THD) de bajo valor, debido a que el número de conmutaciones debe ser elevado (ver[15, 27])..
La técnica de SVPWM o modulación de espacio vectorial permite manejar un inversor trifásico
como el requerido en este caso, su principal característica es que se sustituye todo el sistema
trifásico por un sólo vector en el que la frecuencia queda reflejada en su velocidad de giro con el
paso del tiempo, esto permite emplear dicho vector para estudiar tanto los regímenes
estacionarios como dinámicos en dichos sistemas.
Son varias las ventajas que presenta el control vectorial aunque depende de la aplicación, por
ejemplo, cuando se trata de controlar un motor trifásico de inducción, el control vectorial sobre el
inversor trifásico permite desacoplar las variables del motor de inducción, de forma que se logra
un control independiente de la velocidad y del par, equivalente al motor DC.
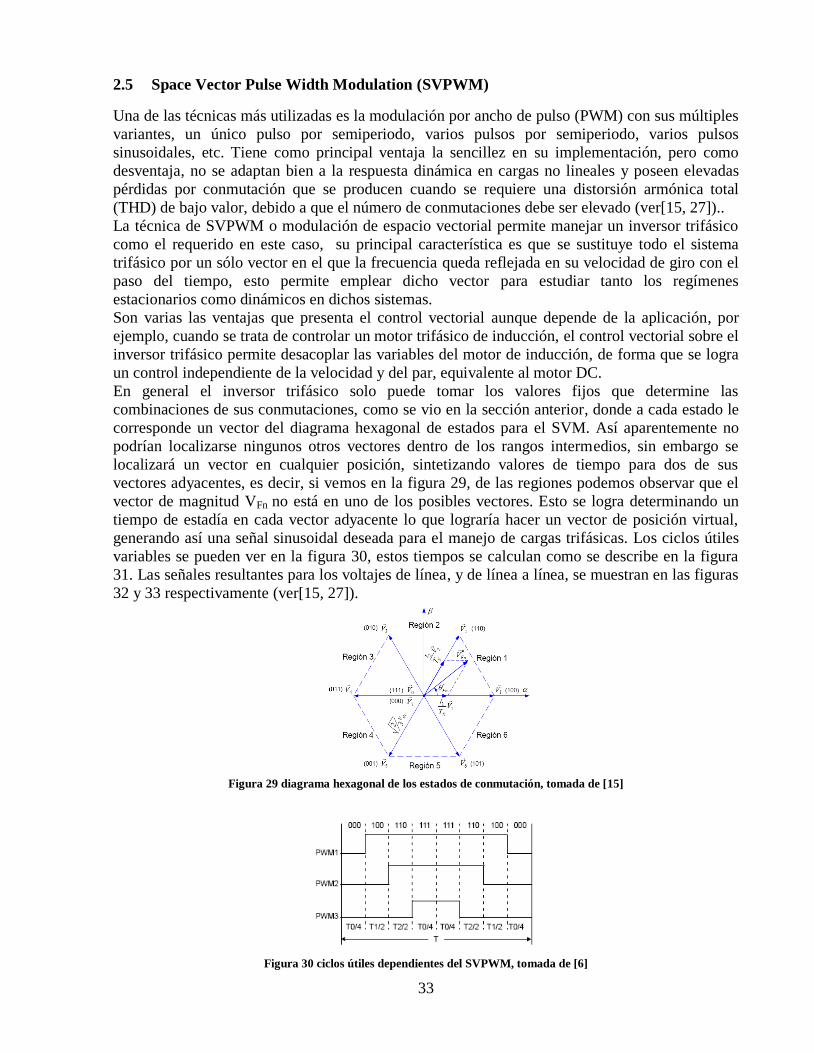
En general el inversor trifásico solo puede tomar los valores fijos que determine las
combinaciones de sus conmutaciones, como se vio en la sección anterior, donde a cada estado le
corresponde un vector del diagrama hexagonal de estados para el SVM. Así aparentemente no
podrían localizarse ningunos otros vectores dentro de los rangos intermedios, sin embargo se
localizará un vector en cualquier posición, sintetizando valores de tiempo para dos de sus
vectores adyacentes, es decir, si vemos en la figura 29, de las regiones podemos observar que el
vector de magnitud VFn no está en uno de los posibles vectores. Esto se logra determinando un
tiempo de estadía en cada vector adyacente lo que lograría hacer un vector de posición virtual,
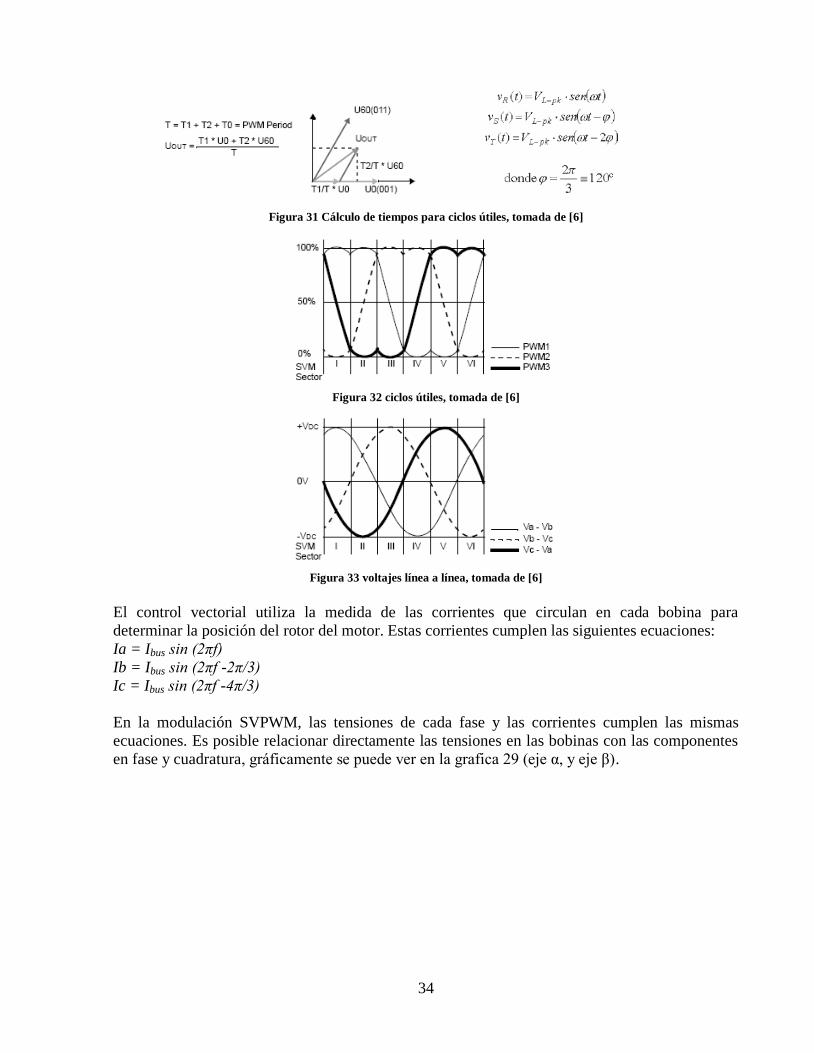
generando así una señal sinusoidal deseada para el manejo de cargas trifásicas. Los ciclos útiles
variables se pueden ver en la figura 30, estos tiempos se calculan como se describe en la figura
31. Las señales resultantes para los voltajes de línea, y de línea a línea, se muestran en las figuras
32 y 33 respectivamente (ver[15, 27]).
Figura 29 diagrama hexagonal de los estados de conmutación, tomada de [15]
Figura 30 ciclos útiles dependientes del SVPWM, tomada de [6]
34
Figura 31 Cálculo de tiempos para ciclos útiles, tomada de [6]
Figura 32 ciclos útiles, tomada de [6]
Figura 33 voltajes línea a línea, tomada de [6]
El control vectorial utiliza la medida de las corrientes que circulan en cada bobina para
determinar la posición del rotor del motor. Estas corrientes cumplen las siguientes ecuaciones:
Ia = Ibus sin (2πf)
Ib = Ibus sin (2πf -2π/3)
Ic = Ibus sin (2πf -4π/3)
En la modulación SVPWM, las tensiones de cada fase y las corrientes cumplen las mismas
ecuaciones. Es posible relacionar directamente las tensiones en las bobinas con las componentes
en fase y cuadratura, gráficamente se puede ver en la grafica 29 (eje α, y eje β).
35
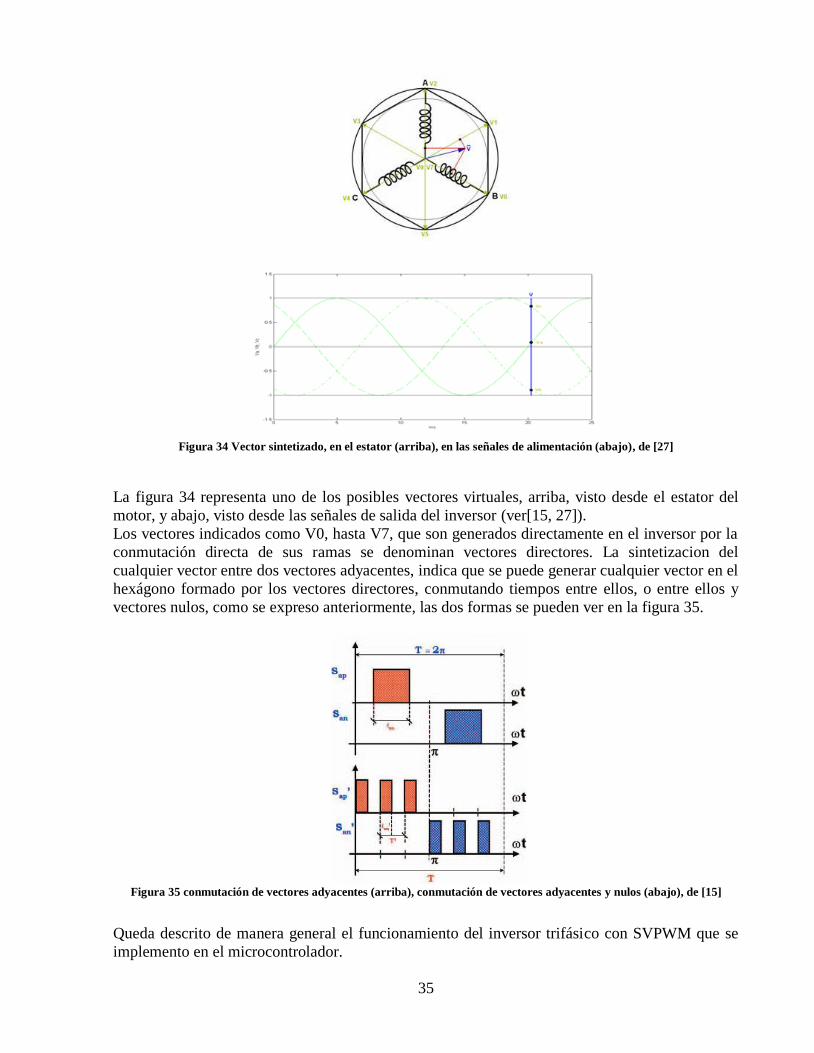
Figura 34 Vector sintetizado, en el estator (arriba), en las señales de alimentación (abajo), de [27]
La figura 34 representa uno de los posibles vectores virtuales, arriba, visto desde el estator del
motor, y abajo, visto desde las señales de salida del inversor (ver[15, 27]).
Los vectores indicados como V0, hasta V7, que son generados directamente en el inversor por la
conmutación directa de sus ramas se denominan vectores directores. La sintetizacion del
cualquier vector entre dos vectores adyacentes, indica que se puede generar cualquier vector en el
hexágono formado por los vectores directores, conmutando tiempos entre ellos, o entre ellos y
vectores nulos, como se expreso anteriormente, las dos formas se pueden ver en la figura 35.
Figura 35 conmutación de vectores adyacentes (arriba), conmutación de vectores adyacentes y nulos (abajo), de [15]
Queda descrito de manera general el funcionamiento del inversor trifásico con SVPWM que se
implemento en el microcontrolador.
36
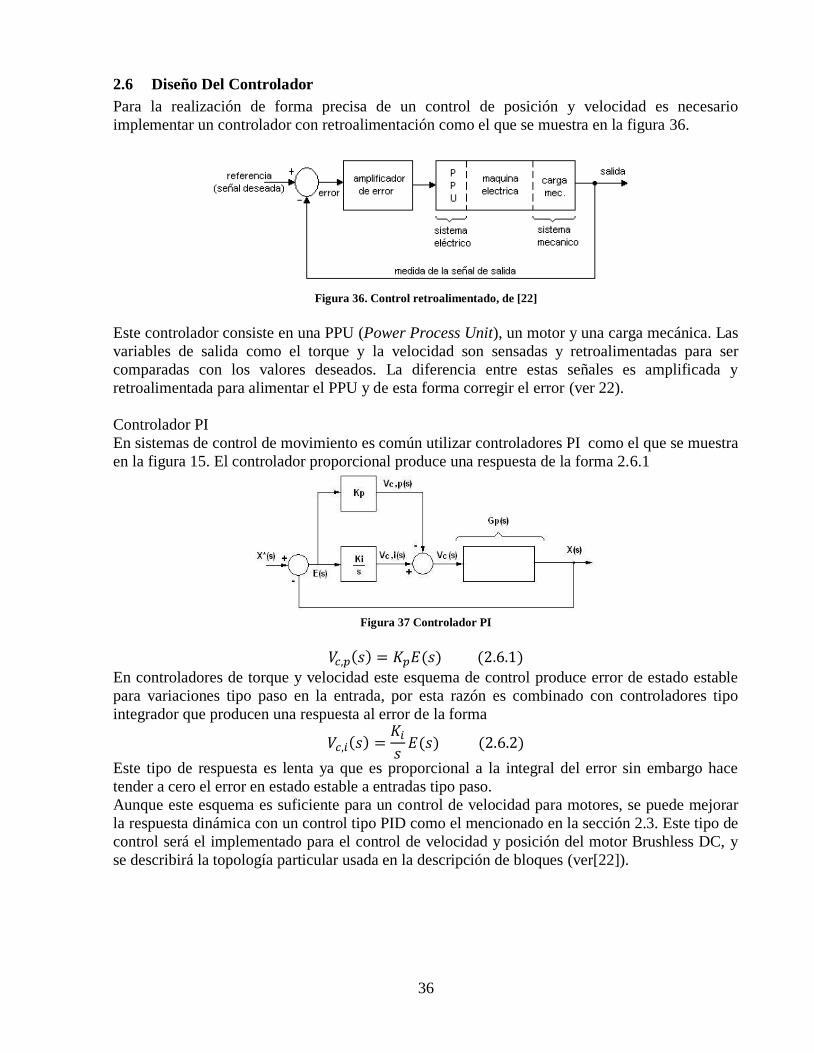
2.6 Diseño Del Controlador
Para la realización de forma precisa de un control de posición y velocidad es necesario
implementar un controlador con retroalimentación como el que se muestra en la figura 36.
Figura 36. Control retroalimentado, de [22]
Este controlador consiste en una PPU (Power Process Unit), un motor y una carga mecánica. Las
variables de salida como el torque y la velocidad son sensadas y retroalimentadas para ser
comparadas con los valores deseados. La diferencia entre estas señales es amplificada y
retroalimentada para alimentar el PPU y de esta forma corregir el error (ver 22).
Controlador PI
En sistemas de control de movimiento es común utilizar controladores PI como el que se muestra
en la figura 15. El controlador proporcional produce una respuesta de la forma 2.6.1
Figura 37 Controlador PI
En controladores de torque y velocidad este esquema de control produce error de estado estable
para variaciones tipo paso en la entrada, por esta razón es combinado con controladores tipo
integrador que producen una respuesta al error de la forma
Este tipo de respuesta es lenta ya que es proporcional a la integral del error sin embargo hace
tender a cero el error en estado estable a entradas tipo paso.
Aunque este esquema es suficiente para un control de velocidad para motores, se puede mejorar
la respuesta dinámica con un control tipo PID como el mencionado en la sección 2.3. Este tipo de
control será el implementado para el control de velocidad y posición del motor Brushless DC, y
se describirá la topología particular usada en la descripción de bloques (ver[22]).
37
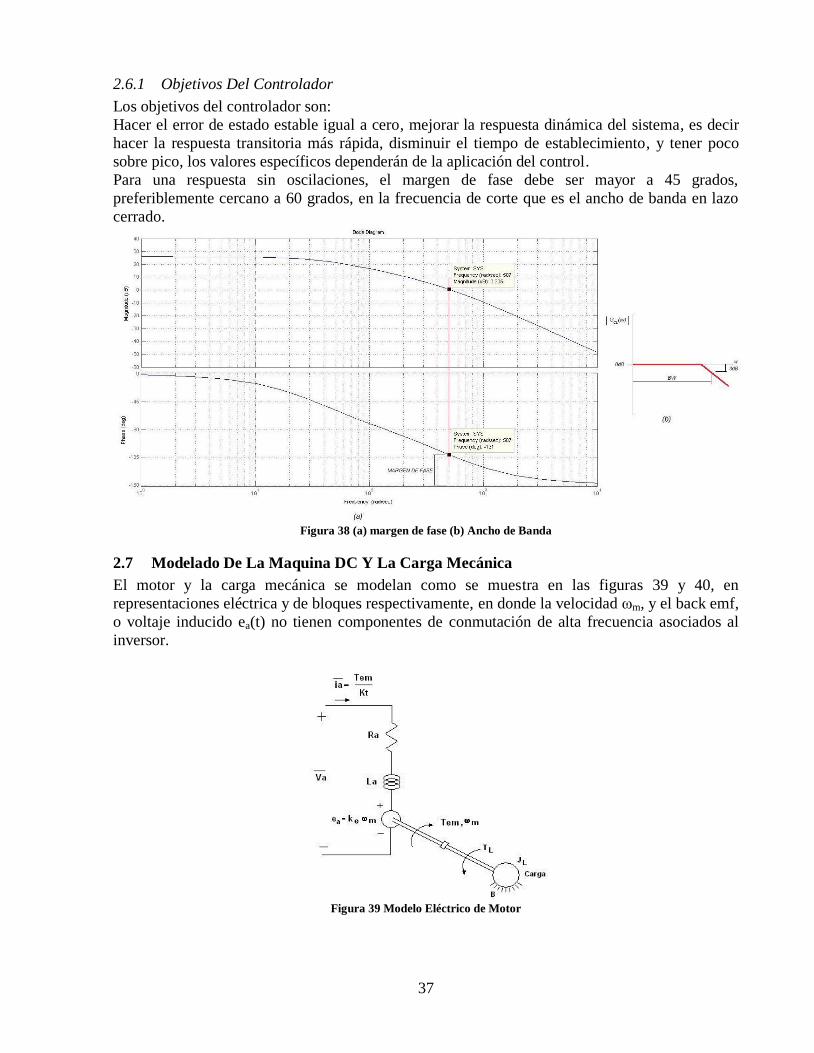
2.6.1 Objetivos Del Controlador
Los objetivos del controlador son:
Hacer el error de estado estable igual a cero, mejorar la respuesta dinámica del sistema, es decir
hacer la respuesta transitoria más rápida, disminuir el tiempo de establecimiento, y tener poco
sobre pico, los valores específicos dependerán de la aplicación del control.
Para una respuesta sin oscilaciones, el margen de fase debe ser mayor a 45 grados,
preferiblemente cercano a 60 grados, en la frecuencia de corte que es el ancho de banda en lazo
cerrado.
Figura 38 (a) margen de fase (b) Ancho de Banda
2.7 Modelado De La Maquina DC Y La Carga Mecánica
El motor y la carga mecánica se modelan como se muestra en las figuras 39 y 40, en
representaciones eléctrica y de bloques respectivamente, en donde la velocidad ωm, y el back emf,
o voltaje inducido ea(t) no tienen componentes de conmutación de alta frecuencia asociados al
inversor.
Figura 39 Modelo Eléctrico de Motor
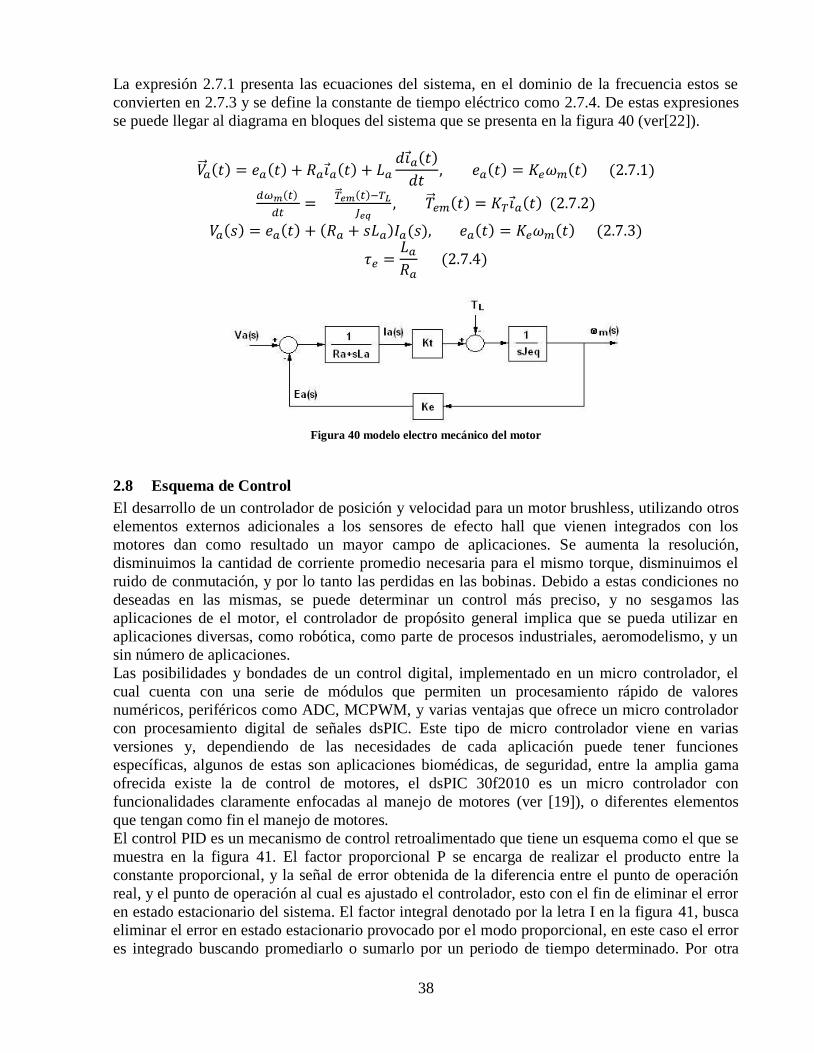
38
La expresión 2.7.1 presenta las ecuaciones del sistema, en el dominio de la frecuencia estos se
convierten en 2.7.3 y se define la constante de tiempo eléctrico como 2.7.4. De estas expresiones
se puede llegar al diagrama en bloques del sistema que se presenta en la figura 40 (ver[22]).
Figura 40 modelo electro mecánico del motor
2.8 Esquema de Control
El desarrollo de un controlador de posición y velocidad para un motor brushless, utilizando otros
elementos externos adicionales a los sensores de efecto hall que vienen integrados con los
motores dan como resultado un mayor campo de aplicaciones. Se aumenta la resolución,
disminuimos la cantidad de corriente promedio necesaria para el mismo torque, disminuimos el
ruido de conmutación, y por lo tanto las perdidas en las bobinas. Debido a estas condiciones no
deseadas en las mismas, se puede determinar un control más preciso, y no sesgamos las
aplicaciones de el motor, el controlador de propósito general implica que se pueda utilizar en
aplicaciones diversas, como robótica, como parte de procesos industriales, aeromodelismo, y un
sin número de aplicaciones.
Las posibilidades y bondades de un control digital, implementado en un micro controlador, el
cual cuenta con una serie de módulos que permiten un procesamiento rápido de valores
numéricos, periféricos como ADC, MCPWM, y varias ventajas que ofrece un micro controlador
con procesamiento digital de señales dsPIC. Este tipo de micro controlador viene en varias
versiones y, dependiendo de las necesidades de cada aplicación puede tener funciones
específicas, algunos de estas son aplicaciones biomédicas, de seguridad, entre la amplia gama
ofrecida existe la de control de motores, el dsPIC 30f2010 es un micro controlador con
funcionalidades claramente enfocadas al manejo de motores (ver [19]), o diferentes elementos
que tengan como fin el manejo de motores.
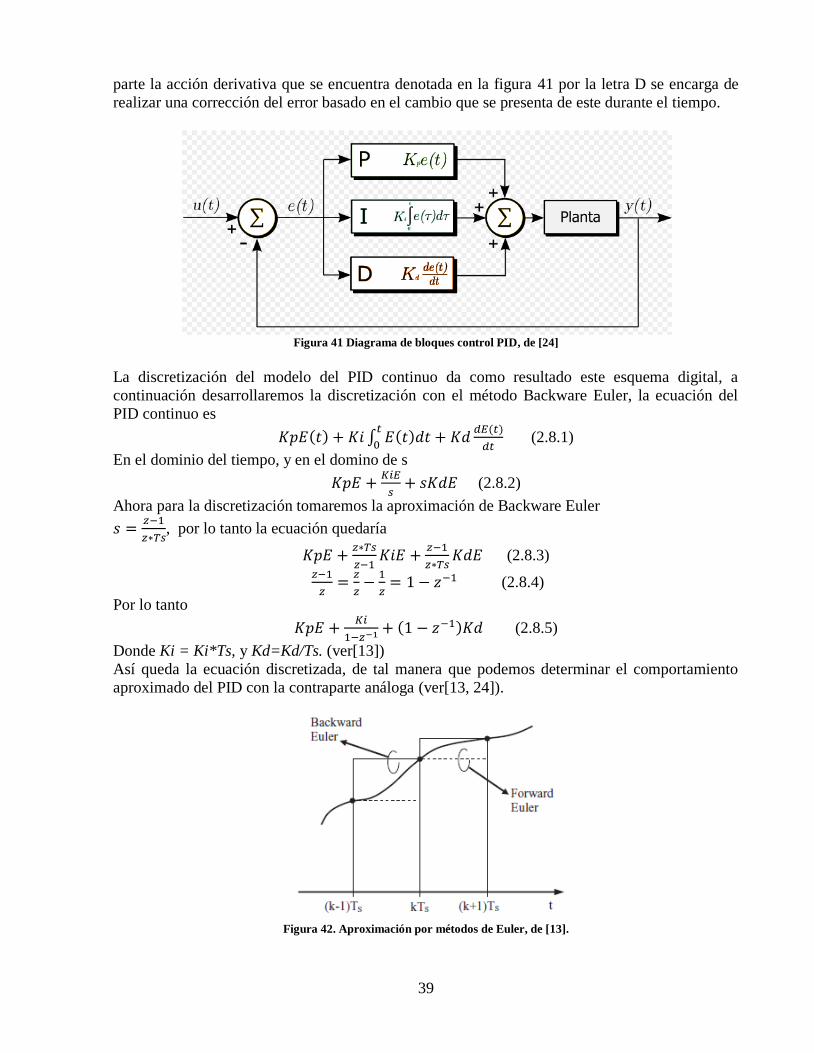
El control PID es un mecanismo de control retroalimentado que tiene un esquema como el que se
muestra en la figura 41. El factor proporcional P se encarga de realizar el producto entre la
constante proporcional, y la señal de error obtenida de la diferencia entre el punto de operación
real, y el punto de operación al cual es ajustado el controlador, esto con el fin de eliminar el error
en estado estacionario del sistema. El factor integral denotado por la letra I en la figura 41, busca
eliminar el error en estado estacionario provocado por el modo proporcional, en este caso el error
es integrado buscando promediarlo o sumarlo por un periodo de tiempo determinado. Por otra
39
parte la acción derivativa que se encuentra denotada en la figura 41 por la letra D se encarga de
realizar una corrección del error basado en el cambio que se presenta de este durante el tiempo.
Figura 41 Diagrama de bloques control PID, de [24]
La discretización del modelo del PID continuo da como resultado este esquema digital, a
continuación desarrollaremos la discretización con el método Backware Euler, la ecuación del
PID continuo es
(2.8.1)
En el dominio del tiempo, y en el domino de s
(2.8.2)
Ahora para la discretización tomaremos la aproximación de Backware Euler
, por lo tanto la ecuación quedaría
(2.8.3)
(2.8.4)
Por lo tanto
(2.8.5)
Donde Ki = Ki*Ts, y Kd=Kd/Ts. (ver[13])
Así queda la ecuación discretizada, de tal manera que podemos determinar el comportamiento
aproximado del PID con la contraparte análoga (ver[13, 24]).
Figura 42. Aproximación por métodos de Euler, de [13].
40
2.9 Tipos de Conmutación
Para el diseño del controlador del motor, y dependiendo del tipo de convertidor o fuente para
suministrar la potencia al motor, y de la naturaleza del mismo se deben tener en cuenta ciertas
consideraciones. Una de las más importantes se refiere a la forma de las señales para el manejo
del controlador debido a que se requiere una conmutación entre las fases del motor. Para
inversores de voltaje donde el voltaje es aplicado a las bobinas del motor DC por medio de
conmutación entre las fases, aparecen armónicos en la señal de onda, estos armónicos causan
perdidas en el núcleo del motor y dependiendo de la reactancia del motor, la bobina puede no
trabajar a la capacidad deseada, variando las condiciones eléctricas y mecánicas del motor, como
perdida en el torque, en el par de arranque, etc. Por lo tanto debemos decidir qué tipo de señal
deseamos para controlar la etapa que suministrará potencia al motor (ver[27, 4, 5]).
Una de las formas más comunes es la conmutación directa de las fases del motor, sin embargo
como se dijo anteriormente puede deteriorar las características del motor. Otro tipo de control
para la conmutación de las fases, y que se considera una conmutación más suave, se hace
sintetizando una señal sinusoidal por medio de un PWM, o otro sistema de conmutación de alta
frecuencia.
La etapa de potencia a usar será un inversor trifásico, el cual nos permite conectar una etapa de
control de baja potencia (orden de los mW), a una etapa con potencias mayores (orden de los W),
este inversor consiste en tres semi-puentes que por medio de las señales de control PWM,
podemos generar señales AC, alimentando este con una señal DC, se denomina trifásico porque
requerimos tres señales AC sincronizadas.
2.10 Encoder
El encoder de cuadratura es un sensor digital de posición que mediante dispositivos ópticos
convierte una posición angular, en una señal digital, que puede tener un procesamiento básico de
la señal como filtrado y permite adecuar, mostrar, y procesar su señal de salida. Este tipo de
dispositivo permite saber la variación de posición del rotor con una resolución alta, dependiendo
del tipo de señales que genera tiene mayor o menor resolución. El encoder utilizado genera 2048
pulsos por vuelta, su resolución es de 0.175º mecánicos, este dispositivo cuenta con una rueda
con intermitencias físicas, que impiden y permiten el paso de la luz, con lo cual se puede tener
una cantidad numérica de la posición del rotor, dependiendo de la cantidad de interrupciones que
tenga un haz de luz que se encuentre en la trayectoria de la rueda, así podemos determinar una
cantidad de pulsos por unidad de tiempo. En el mercado existen dos clases principales de encoder
rotativo, incrementales, y absolutos, los cuales se subdividen en dos versiones dependiendo del
acoplamiento al eje del motor, con un eje propio del encoder, o con eje hueco.
El encoder absoluto tiene su nombre debido a que su sistema de referencia es, valga la
redundancia, absoluto, la posición de su eje con respecto a un punto especifico es definido por un
único valor, así pues, se puede decir que cada radio del disco del encoder tiene un único valor y
por lo tanto solo depende de dicho valor.
Otro tipo de encoder es relativo, que se refiere a que cada punto no tiene un valor asignado, y por
lo tanto nuestra labor consistiría en hacer un procesamiento de las señales entregadas por este
para saber, posición, velocidad, y demás. En la categoría de este encoder se encuentra el
incremental de cuadratura, que consiste en un encoder con señales definidas para saber el sentido
de giro, además de un indicador de vuelta, que se denomina indexado. En la figura 43 se
muestran tres tipos de encoder.
41
Figura 43, tipos encoder absoluto eje hueco, incremental eje solido, ranurado embebido.
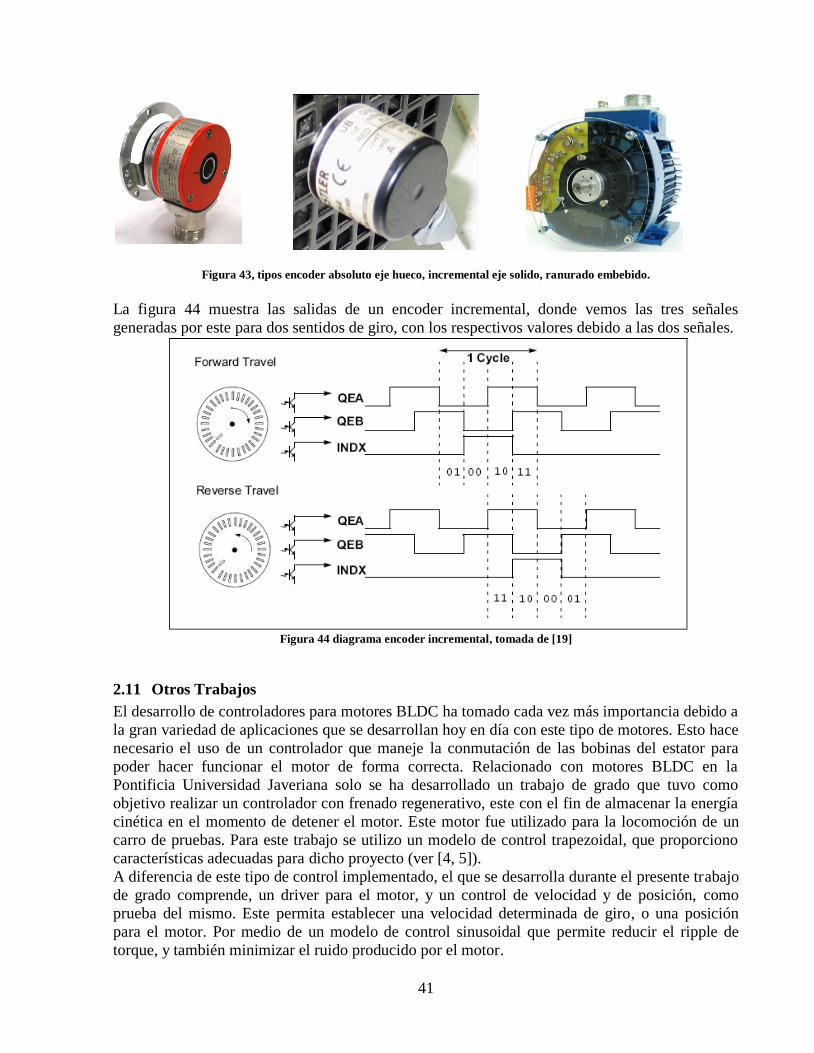
La figura 44 muestra las salidas de un encoder incremental, donde vemos las tres señales
generadas por este para dos sentidos de giro, con los respectivos valores debido a las dos señales.
Figura 44 diagrama encoder incremental, tomada de [19]
2.11 Otros Trabajos
El desarrollo de controladores para motores BLDC ha tomado cada vez más importancia debido a
la gran variedad de aplicaciones que se desarrollan hoy en día con este tipo de motores. Esto hace
necesario el uso de un controlador que maneje la conmutación de las bobinas del estator para
poder hacer funcionar el motor de forma correcta. Relacionado con motores BLDC en la
Pontificia Universidad Javeriana solo se ha desarrollado un trabajo de grado que tuvo como
objetivo realizar un controlador con frenado regenerativo, este con el fin de almacenar la energía
cinética en el momento de detener el motor. Este motor fue utilizado para la locomoción de un
carro de pruebas. Para este trabajo se utilizo un modelo de control trapezoidal, que proporciono
características adecuadas para dicho proyecto (ver [4, 5]).
A diferencia de este tipo de control implementado, el que se desarrolla durante el presente trabajo
de grado comprende, un driver para el motor, y un control de velocidad y de posición, como
prueba del mismo. Este permita establecer una velocidad determinada de giro, o una posición
para el motor. Por medio de un modelo de control sinusoidal que permite reducir el ripple de
torque, y también minimizar el ruido producido por el motor.
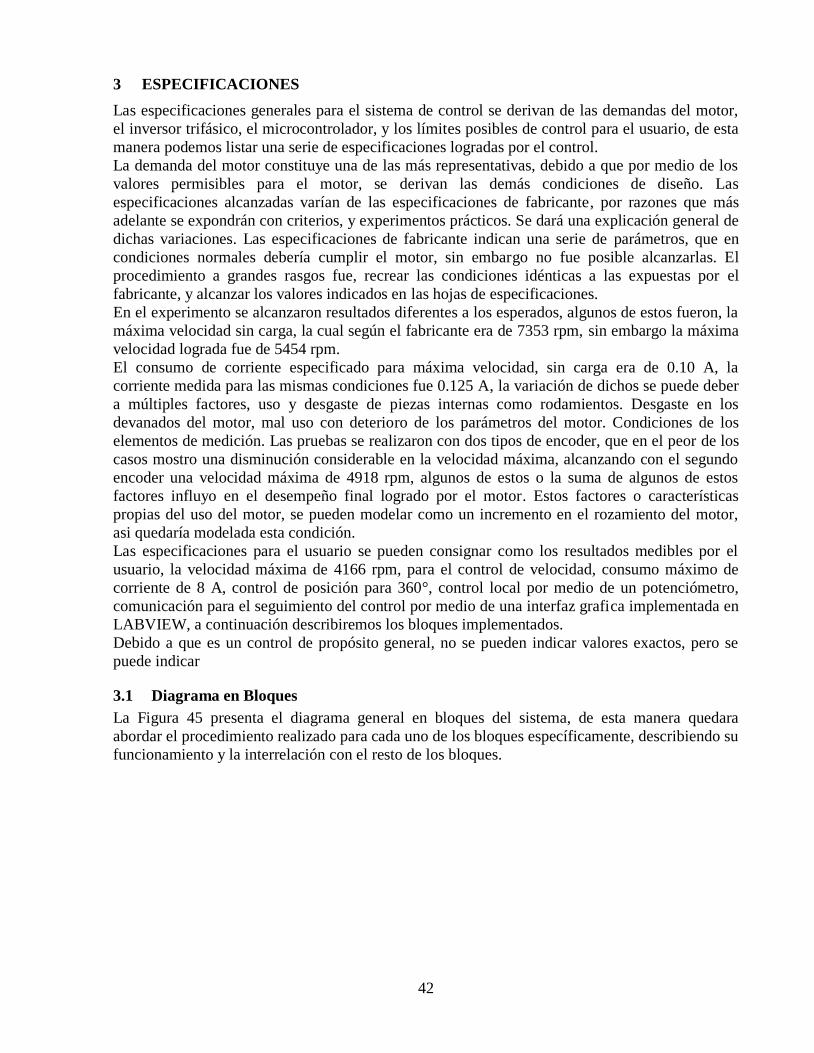
42
3 ESPECIFICACIONES
Las especificaciones generales para el sistema de control se derivan de las demandas del motor,
el inversor trifásico, el microcontrolador, y los límites posibles de control para el usuario, de esta
manera podemos listar una serie de especificaciones logradas por el control.
La demanda del motor constituye una de las más representativas, debido a que por medio de los
valores permisibles para el motor, se derivan las demás condiciones de diseño. Las
especificaciones alcanzadas varían de las especificaciones de fabricante, por razones que más
adelante se expondrán con criterios, y experimentos prácticos. Se dará una explicación general de
dichas variaciones. Las especificaciones de fabricante indican una serie de parámetros, que en
condiciones normales debería cumplir el motor, sin embargo no fue posible alcanzarlas. El
procedimiento a grandes rasgos fue, recrear las condiciones idénticas a las expuestas por el
fabricante, y alcanzar los valores indicados en las hojas de especificaciones.
En el experimento se alcanzaron resultados diferentes a los esperados, algunos de estos fueron, la
máxima velocidad sin carga, la cual según el fabricante era de 7353 rpm, sin embargo la máxima
velocidad lograda fue de 5454 rpm.
El consumo de corriente especificado para máxima velocidad, sin carga era de 0.10 A, la
corriente medida para las mismas condiciones fue 0.125 A, la variación de dichos se puede deber
a múltiples factores, uso y desgaste de piezas internas como rodamientos. Desgaste en los
devanados del motor, mal uso con deterioro de los parámetros del motor. Condiciones de los
elementos de medición. Las pruebas se realizaron con dos tipos de encoder, que en el peor de los
casos mostro una disminución considerable en la velocidad máxima, alcanzando con el segundo
encoder una velocidad máxima de 4918 rpm, algunos de estos o la suma de algunos de estos
factores influyo en el desempeño final logrado por el motor. Estos factores o características
propias del uso del motor, se pueden modelar como un incremento en el rozamiento del motor,
asi quedaría modelada esta condición.
Las especificaciones para el usuario se pueden consignar como los resultados medibles por el
usuario, la velocidad máxima de 4166 rpm, para el control de velocidad, consumo máximo de
corriente de 8 A, control de posición para 360°, control local por medio de un potenciómetro,
comunicación para el seguimiento del control por medio de una interfaz grafica implementada en
LABVIEW, a continuación describiremos los bloques implementados.
Debido a que es un control de propósito general, no se pueden indicar valores exactos, pero se
puede indicar
3.1 Diagrama en Bloques
La Figura 45 presenta el diagrama general en bloques del sistema, de esta manera quedara
abordar el procedimiento realizado para cada uno de los bloques específicamente, describiendo su
funcionamiento y la interrelación con el resto de los bloques.
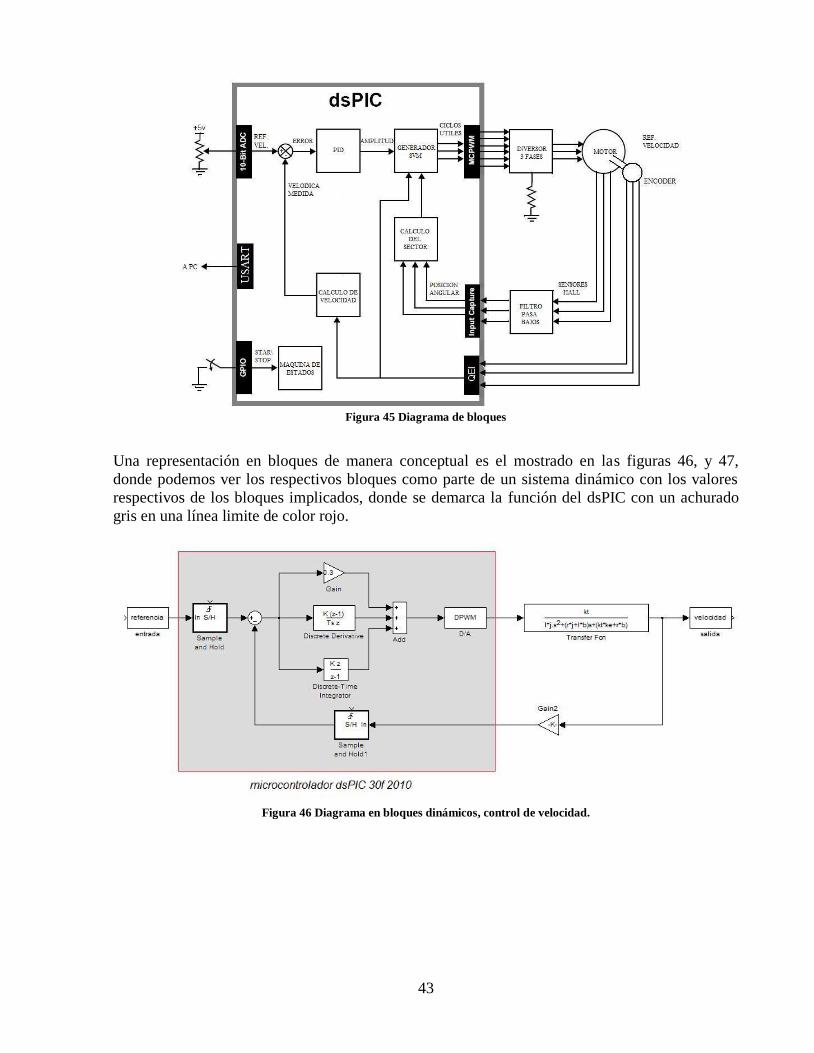
43
Figura 45 Diagrama de bloques
Una representación en bloques de manera conceptual es el mostrado en las figuras 46, y 47,
donde podemos ver los respectivos bloques como parte de un sistema dinámico con los valores
respectivos de los bloques implicados, donde se demarca la función del dsPIC con un achurado
gris en una línea limite de color rojo.
Figura 46 Diagrama en bloques dinámicos, control de velocidad.
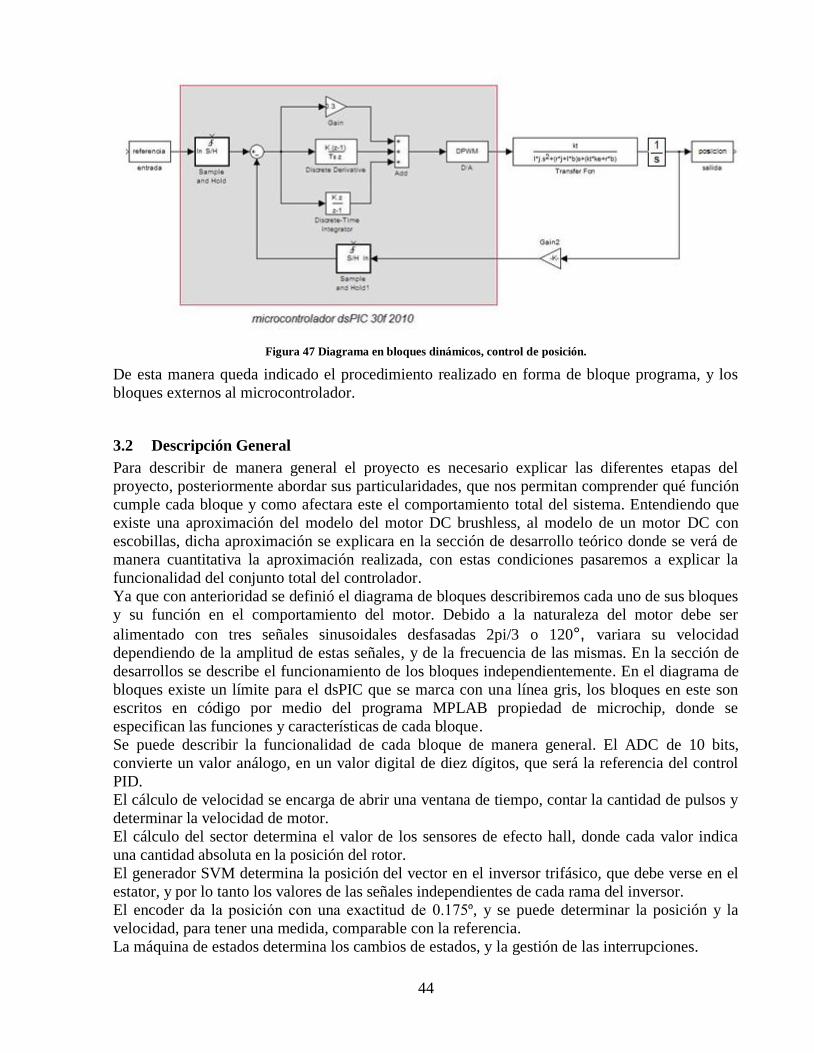
44
Figura 47 Diagrama en bloques dinámicos, control de posición.
De esta manera queda indicado el procedimiento realizado en forma de bloque programa, y los
bloques externos al microcontrolador.
3.2 Descripción General
Para describir de manera general el proyecto es necesario explicar las diferentes etapas del
proyecto, posteriormente abordar sus particularidades, que nos permitan comprender qué función
cumple cada bloque y como afectara este el comportamiento total del sistema. Entendiendo que
existe una aproximación del modelo del motor DC brushless, al modelo de un motor DC con
escobillas, dicha aproximación se explicara en la sección de desarrollo teórico donde se verá de
manera cuantitativa la aproximación realizada, con estas condiciones pasaremos a explicar la
funcionalidad del conjunto total del controlador.
Ya que con anterioridad se definió el diagrama de bloques describiremos cada uno de sus bloques
y su función en el comportamiento del motor. Debido a la naturaleza del motor debe ser
alimentado con tres señales sinusoidales desfasadas 2pi/3 o 120°, variara su velocidad
dependiendo de la amplitud de estas señales, y de la frecuencia de las mismas. En la sección de
desarrollos se describe el funcionamiento de los bloques independientemente. En el diagrama de
bloques existe un límite para el dsPIC que se marca con una línea gris, los bloques en este son
escritos en código por medio del programa MPLAB propiedad de microchip, donde se
especifican las funciones y características de cada bloque.
Se puede describir la funcionalidad de cada bloque de manera general. El ADC de 10 bits,
convierte un valor análogo, en un valor digital de diez dígitos, que será la referencia del control
PID.
El cálculo de velocidad se encarga de abrir una ventana de tiempo, contar la cantidad de pulsos y
determinar la velocidad de motor.
El cálculo del sector determina el valor de los sensores de efecto hall, donde cada valor indica
una cantidad absoluta en la posición del rotor.
El generador SVM determina la posición del vector en el inversor trifásico, que debe verse en el
estator, y por lo tanto los valores de las señales independientes de cada rama del inversor.
El encoder da la posición con una exactitud de 0.175 º, y se puede determinar la posición y la
velocidad, para tener una medida, comparable con la referencia.
La máquina de estados determina los cambios de estados, y la gestión de las interrupciones.
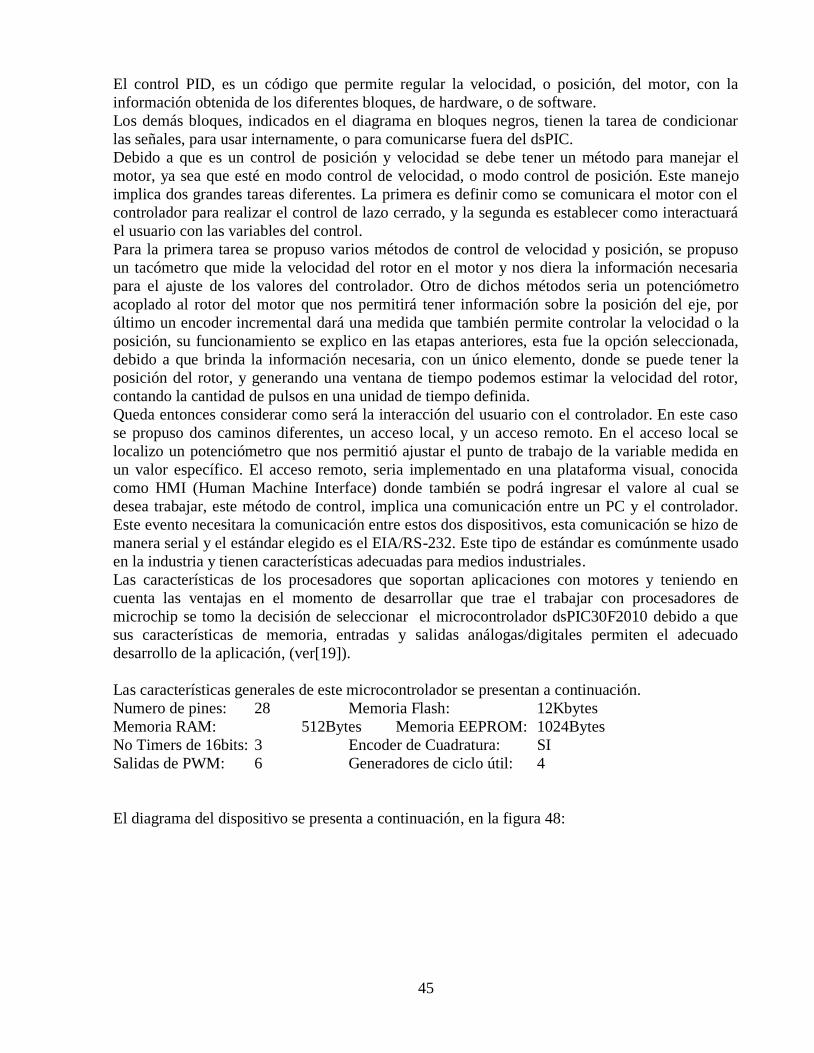
45
El control PID, es un código que permite regular la velocidad, o posición, del motor, con la
información obtenida de los diferentes bloques, de hardware, o de software.
Los demás bloques, indicados en el diagrama en bloques negros, tienen la tarea de condicionar
las señales, para usar internamente, o para comunicarse fuera del dsPIC.
Debido a que es un control de posición y velocidad se debe tener un método para manejar el
motor, ya sea que esté en modo control de velocidad, o modo control de posición. Este manejo
implica dos grandes tareas diferentes. La primera es definir como se comunicara el motor con el
controlador para realizar el control de lazo cerrado, y la segunda es establecer como interactuará
el usuario con las variables del control.
Para la primera tarea se propuso varios métodos de control de velocidad y posición, se propuso
un tacómetro que mide la velocidad del rotor en el motor y nos diera la información necesaria
para el ajuste de los valores del controlador. Otro de dichos métodos seria un potenciómetro
acoplado al rotor del motor que nos permitirá tener información sobre la posición del eje, por
último un encoder incremental dará una medida que también permite controlar la velocidad o la
posición, su funcionamiento se explico en las etapas anteriores, esta fue la opción seleccionada,
debido a que brinda la información necesaria, con un único elemento, donde se puede tener la
posición del rotor, y generando una ventana de tiempo podemos estimar la velocidad del rotor,
contando la cantidad de pulsos en una unidad de tiempo definida.
Queda entonces considerar como será la interacción del usuario con el controlador. En este caso
se propuso dos caminos diferentes, un acceso local, y un acceso remoto. En el acceso local se
localizo un potenciómetro que nos permitió ajustar el punto de trabajo de la variable medida en
un valor específico. El acceso remoto, seria implementado en una plataforma visual, conocida
como HMI (Human Machine Interface) donde también se podrá ingresar el valore al cual se
desea trabajar, este método de control, implica una comunicación entre un PC y el controlador.
Este evento necesitara la comunicación entre estos dos dispositivos, esta comunicación se hizo de
manera serial y el estándar elegido es el EIA/RS-232. Este tipo de estándar es comúnmente usado
en la industria y tienen características adecuadas para medios industriales.
Las características de los procesadores que soportan aplicaciones con motores y teniendo en
cuenta las ventajas en el momento de desarrollar que trae el trabajar con procesadores de
microchip se tomo la decisión de seleccionar el microcontrolador dsPIC30F2010 debido a que
sus características de memoria, entradas y salidas análogas/digitales permiten el adecuado
desarrollo de la aplicación, (ver[19]).
Las características generales de este microcontrolador se presentan a continuación.
Numero de pines: 28 Memoria Flash: 12Kbytes
Memoria RAM: 512Bytes Memoria EEPROM: 1024Bytes
No Timers de 16bits: 3 Encoder de Cuadratura: SI
Salidas de PWM: 6 Generadores de ciclo útil: 4
El diagrama del dispositivo se presenta a continuación, en la figura 48:
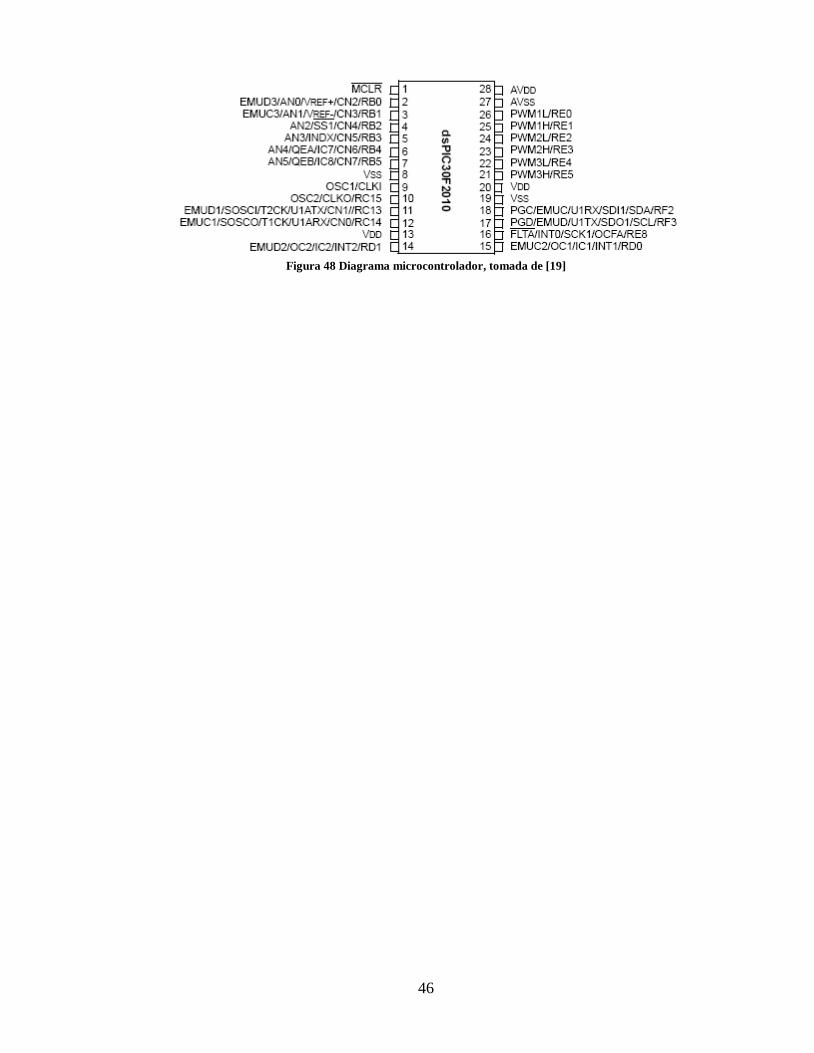
46
Figura 48 Diagrama microcontrolador, tomada de [19]
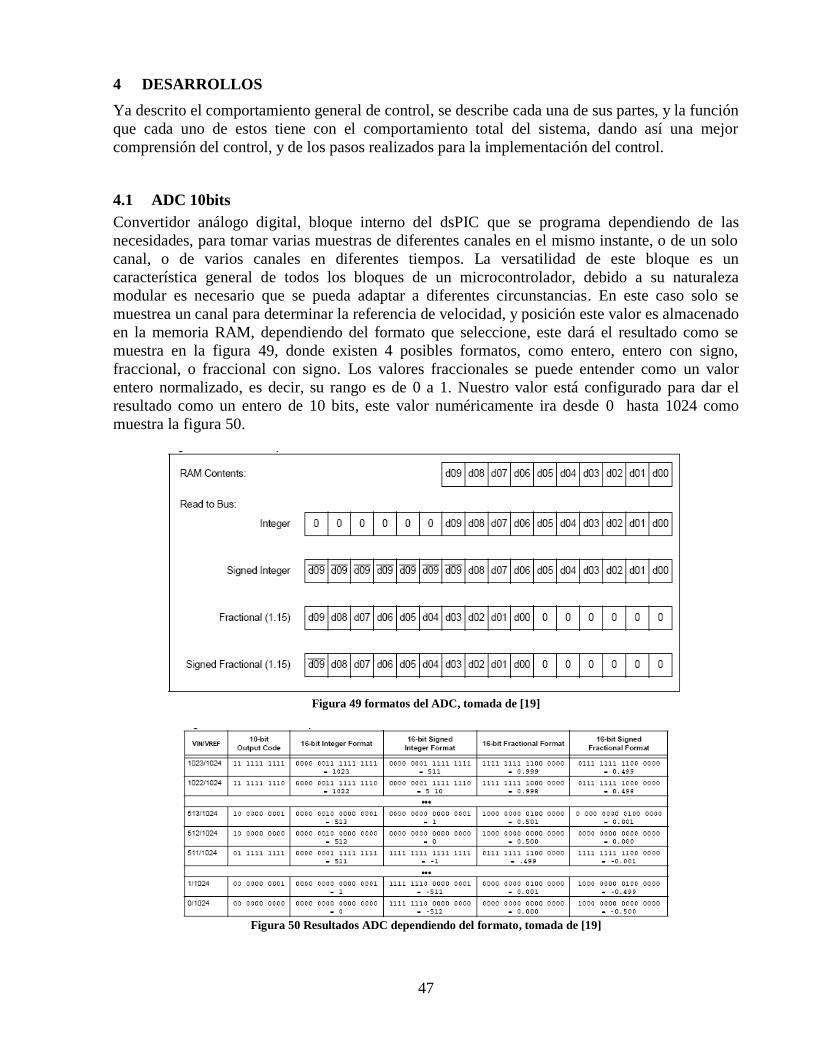
47
4 DESARROLLOS
Ya descrito el comportamiento general de control, se describe cada una de sus partes, y la función
que cada uno de estos tiene con el comportamiento total del sistema, dando así una mejor
comprensión del control, y de los pasos realizados para la implementación del control.
4.1 ADC 10bits
Convertidor análogo digital, bloque interno del dsPIC que se programa dependiendo de las
necesidades, para tomar varias muestras de diferentes canales en el mismo instante, o de un solo
canal, o de varios canales en diferentes tiempos. La versatilidad de este bloque es un
característica general de todos los bloques de un microcontrolador, debido a su naturaleza
modular es necesario que se pueda adaptar a diferentes circunstancias. En este caso solo se
muestrea un canal para determinar la referencia de velocidad, y posición este valor es almacenado
en la memoria RAM, dependiendo del formato que seleccione, este dará el resultado como se
muestra en la figura 49, donde existen 4 posibles formatos, como entero, entero con signo,
fraccional, o fraccional con signo. Los valores fraccionales se puede entender como un valor
entero normalizado, es decir, su rango es de 0 a 1. Nuestro valor está configurado para dar el
resultado como un entero de 10 bits, este valor numéricamente ira desde 0 hasta 1024 como
muestra la figura 50.
Figura 49 formatos del ADC, tomada de [19]
Figura 50 Resultados ADC dependiendo del formato, tomada de [19]
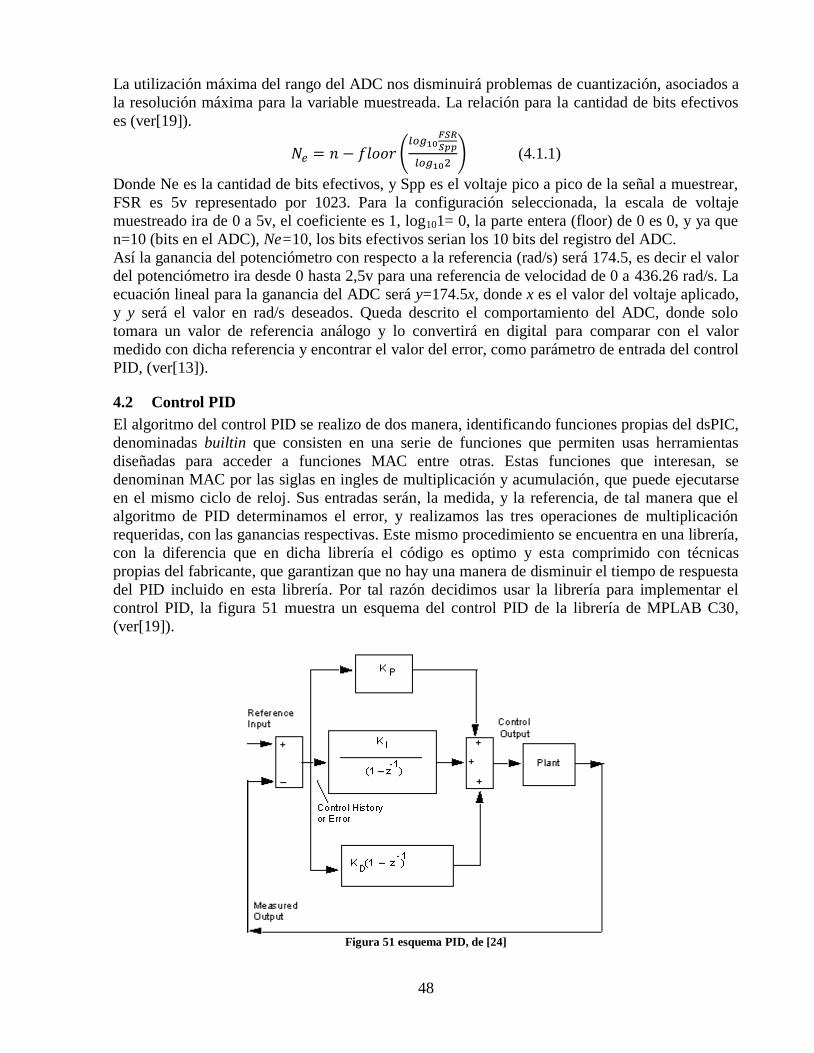
48
La utilización máxima del rango del ADC nos disminuirá problemas de cuantización, asociados a
la resolución máxima para la variable muestreada. La relación para la cantidad de bits efectivos
es (ver[19]).
(4.1.1)
Donde Ne es la cantidad de bits efectivos, y Spp es el voltaje pico a pico de la señal a muestrear,
FSR es 5v representado por 1023. Para la configuración seleccionada, la escala de voltaje
muestreado ira de 0 a 5v, el coeficiente es 1, log101= 0, la parte entera (floor) de 0 es 0, y ya que
n=10 (bits en el ADC), Ne=10, los bits efectivos serian los 10 bits del registro del ADC.
Así la ganancia del potenciómetro con respecto a la referencia (rad/s) será 174.5, es decir el valor
del potenciómetro ira desde 0 hasta 2,5v para una referencia de velocidad de 0 a 436.26 rad/s. La
ecuación lineal para la ganancia del ADC será y=174.5x, donde x es el valor del voltaje aplicado,
y y será el valor en rad/s deseados. Queda descrito el comportamiento del ADC, donde solo
tomara un valor de referencia análogo y lo convertirá en digital para comparar con el valor
medido con dicha referencia y encontrar el valor del error, como parámetro de entrada del control
PID, (ver[13]).
4.2 Control PID
El algoritmo del control PID se realizo de dos manera, identificando funciones propias del dsPIC,
denominadas builtin que consisten en una serie de funciones que permiten usas herramientas
diseñadas para acceder a funciones MAC entre otras. Estas funciones que interesan, se
denominan MAC por las siglas en ingles de multiplicación y acumulación, que puede ejecutarse
en el mismo ciclo de reloj. Sus entradas serán, la medida, y la referencia, de tal manera que el
algoritmo de PID determinamos el error, y realizamos las tres operaciones de multiplicación
requeridas, con las ganancias respectivas. Este mismo procedimiento se encuentra en una librería,
con la diferencia que en dicha librería el código es optimo y esta comprimido con técnicas
propias del fabricante, que garantizan que no hay una manera de disminuir el tiempo de respuesta
del PID incluido en esta librería. Por tal razón decidimos usar la librería para implementar el
control PID, la figura 51 muestra un esquema del control PID de la librería de MPLAB C30,
(ver[19]).
Figura 51 esquema PID, de [24]
49
Para realizar el controlador se escogió un esquema PID, debido a que al tener los términos
proporcional, integral y derivativo, la respuesta del dispositivo va a presentar características de
fácil adaptabilidad favorables para un controlador de propósito general.
Como se puede ver en la parte de marco teórico, el esquema de PID utilizado genera un algoritmo
que podemos describir, donde veremos las particularidades de dicho PID, y las variables
necesarias para el desempeño indicado con anterioridad, la salida del controlador está dada por un
algoritmo (ver anexo 1) donde, la salida depende de estados guardados, o estados anteriores.
(4.2.1)
Como ya se explico, la forma elegida para implementar el algoritmo PID fue usar las librerías
disponibles en el MPLAB C30, así queda definido el control como algoritmo en el dsPIC, por
medio de dicha librería, dejando como valores ajustables las ganancias. Ahora bien
encontraremos los valores de ganancia que correspondan al mejor desempeño, obteniendo un
control funcional. La sintonización del PID se realizo por método experimental, siguiendo como
recomendación la nota de aplicación AN937 de microchip, donde indican el procedimiento para
determinar experimentalmente el valor de las ganancias en el PID. De esta manera el control se
sintonizo hallando la ganancia proporcional que de un menor error en estado estable, con el
mínimo sobre pico posible.
De igual manera se hizo con la ganancia integral, dejando la ganancia proporcional en el valor
escogido fijo y variando la ganancia integral, hasta obtener una buena respuesta de estos valores
conjuntos.
Siguiendo la línea de sintonizador de controles PID, la siguiente ganancia a abordar es la
ganancia derivativa de esta manera queda determinado el valor de ganancia para cada rama del
PID, con el mejor desempeño obtenido, y con resultado aceptables.
El resultado obtenido para nuestro controlador de velocidad particular, a partir de simulaciones y
resultados teóricos, comparados con resultado experimentales.
4.3 Generador de Ondas Seno a Partir de SVM
El SVM por sus siglas en ingles de modulador vectorial de espacios, es descrita en el marco
teórico como técnica de modulación de ancho de pulso para inversores trifásicos, donde se
calculan tres tiempos, que pasaran al bloque MCPWM donde se generan las señales de PWM.
Estos tiempos son proporcionales a los ciclos útiles necesarios, cada uno para un vector diferente
que hará la coordinación de las conmutaciones de tal manera que el ancho de pulso varié hasta el
valor deseado, es decir, si vemos en la figura 52, tomaremos como ejemplo la señal azul, el valor
para un intervalo de tiempo variara en un rango positivo, en el segundo ciclo variara igualmente
en el rango positivo, y en el tercer intervalo de tiempo variara con pendiente negativa, en un
rango que va de valores positivos, a valores negativos, de esta manera es que variara el ciclo útil
en el PWM1, y así sucesivamente para las otras dos señales de PWM. El motor vera una señal
sinusoidal, igualmente la resta de dos señales dará como resultado señales sinusoidales (ver[15,
6]).
El primer paso consistió en simular los tiempos requeridos para formar la señal de SVM simulado
en MATLAB y dando como resultado los seis estados posibles con sus respectivas respuestas en
tiempo, se puede apreciar el resultado de dicha simulación para cada estado, y para la
consecuente formación de la señal a partir de las señales de intervalos de tiempos, las señales
generadas deben cumplir los parámetros de las figuras 53, y 54.
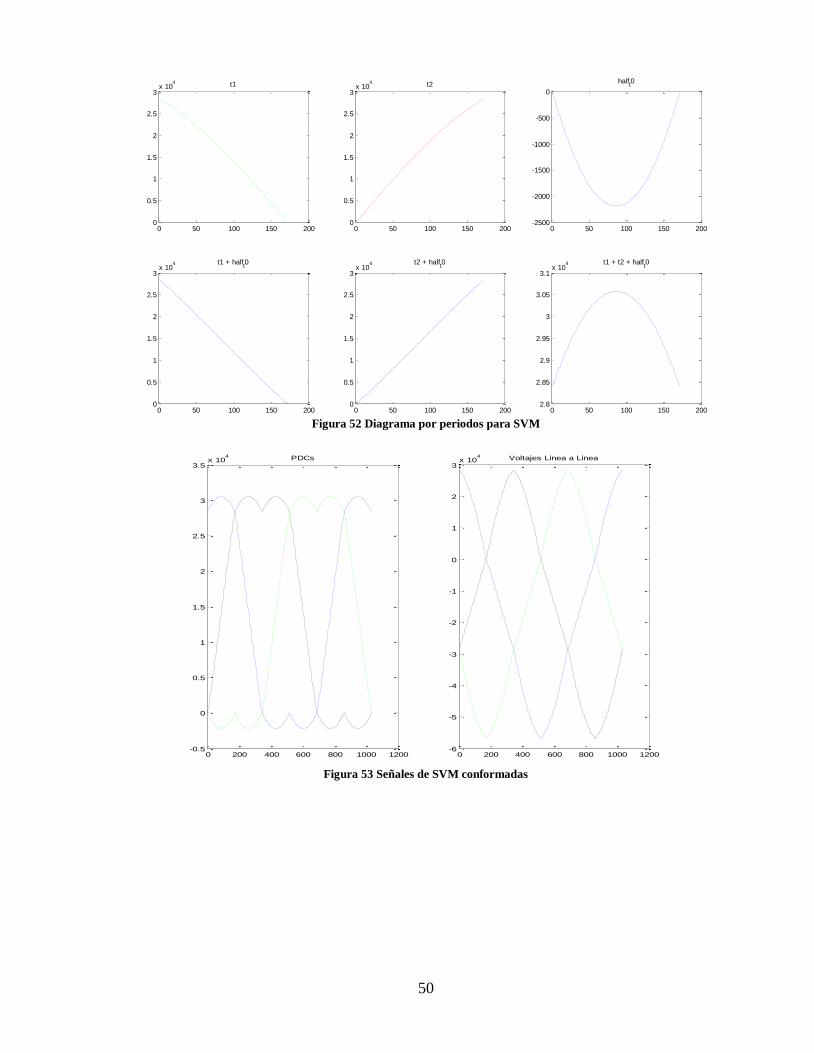
50
Figura 52 Diagrama por periodos para SVM
Figura 53 Señales de SVM conformadas
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4 t1
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4 t2
0 50 100 150 200-2500
-2000
-1500
-1000
-500
0
halft0
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4 t1 + halft0
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4 t2 + halft0
0 50 100 150 2002.8
2.85
2.9
2.95
3
3.05
3.1x 10
4 t1 + t2 + halft0
0 200 400 600 800 1000 1200-0.5
0
0.5
1
1.5
2
2.5
3
3.5x 10
4 PDCs
0 200 400 600 800 1000 1200-6
-5
-4
-3
-2
-1
0
1
2
3x 10
4 Voltajes Linea a Linea
0 200 400 600 800 1000 1200-6
-4
-2
0
2
4
6
8
10x 10
4 voltaje =bobinaX-bobinaY-bobinaZ
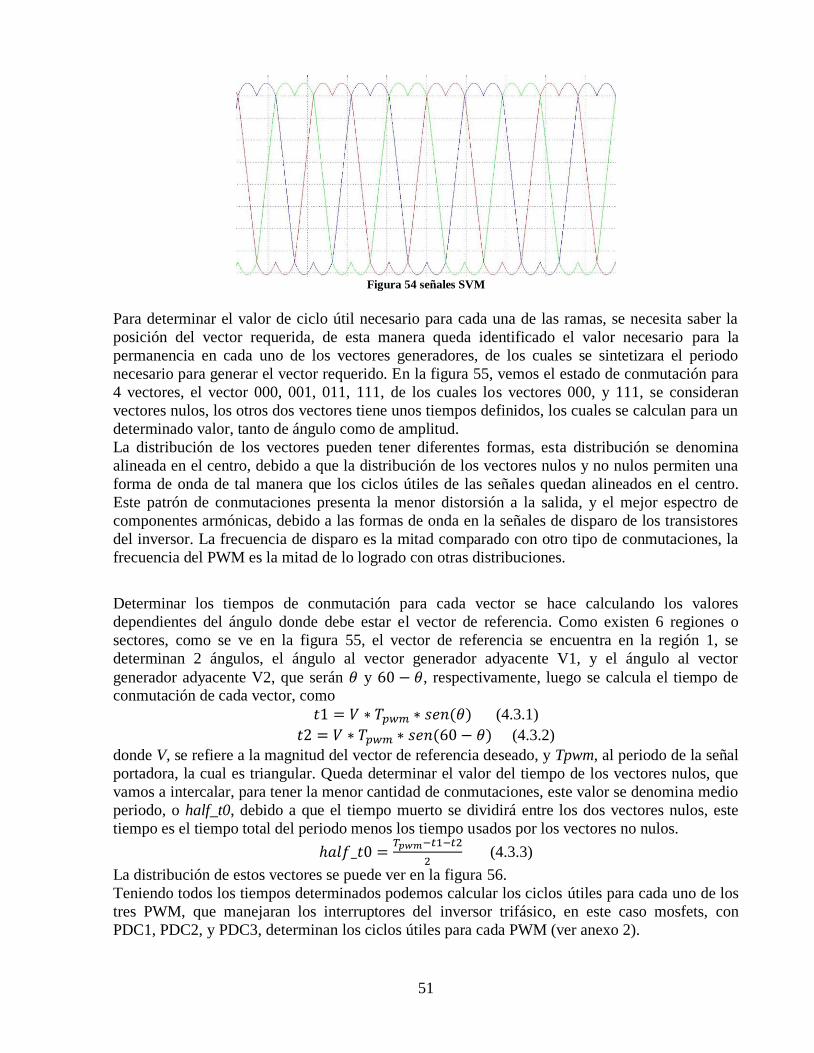
51
Figura 54 señales SVM
Para determinar el valor de ciclo útil necesario para cada una de las ramas, se necesita saber la
posición del vector requerida, de esta manera queda identificado el valor necesario para la
permanencia en cada uno de los vectores generadores, de los cuales se sintetizara el periodo
necesario para generar el vector requerido. En la figura 55, vemos el estado de conmutación para
4 vectores, el vector 000, 001, 011, 111, de los cuales los vectores 000, y 111, se consideran
vectores nulos, los otros dos vectores tiene unos tiempos definidos, los cuales se calculan para un
determinado valor, tanto de ángulo como de amplitud.
La distribución de los vectores pueden tener diferentes formas, esta distribución se denomina
alineada en el centro, debido a que la distribución de los vectores nulos y no nulos permiten una
forma de onda de tal manera que los ciclos útiles de las señales quedan alineados en el centro.
Este patrón de conmutaciones presenta la menor distorsión a la salida, y el mejor espectro de
componentes armónicas, debido a las formas de onda en la señales de disparo de los transistores
del inversor. La frecuencia de disparo es la mitad comparado con otro tipo de conmutaciones, la
frecuencia del PWM es la mitad de lo logrado con otras distribuciones.
Determinar los tiempos de conmutación para cada vector se hace calculando los valores
dependientes del ángulo donde debe estar el vector de referencia. Como existen 6 regiones o
sectores, como se ve en la figura 55, el vector de referencia se encuentra en la región 1, se
determinan 2 ángulos, el ángulo al vector generador adyacente V1, y el ángulo al vector
generador adyacente V2, que serán y , respectivamente, luego se calcula el tiempo de conmutación de cada vector, como
(4.3.1)
(4.3.2)
donde V, se refiere a la magnitud del vector de referencia deseado, y Tpwm, al periodo de la señal
portadora, la cual es triangular. Queda determinar el valor del tiempo de los vectores nulos, que
vamos a intercalar, para tener la menor cantidad de conmutaciones, este valor se denomina medio
periodo, o half_t0, debido a que el tiempo muerto se dividirá entre los dos vectores nulos, este
tiempo es el tiempo total del periodo menos los tiempo usados por los vectores no nulos.
(4.3.3)
La distribución de estos vectores se puede ver en la figura 56.
Teniendo todos los tiempos determinados podemos calcular los ciclos útiles para cada uno de los
tres PWM, que manejaran los interruptores del inversor trifásico, en este caso mosfets, con
PDC1, PDC2, y PDC3, determinan los ciclos útiles para cada PWM (ver anexo 2).
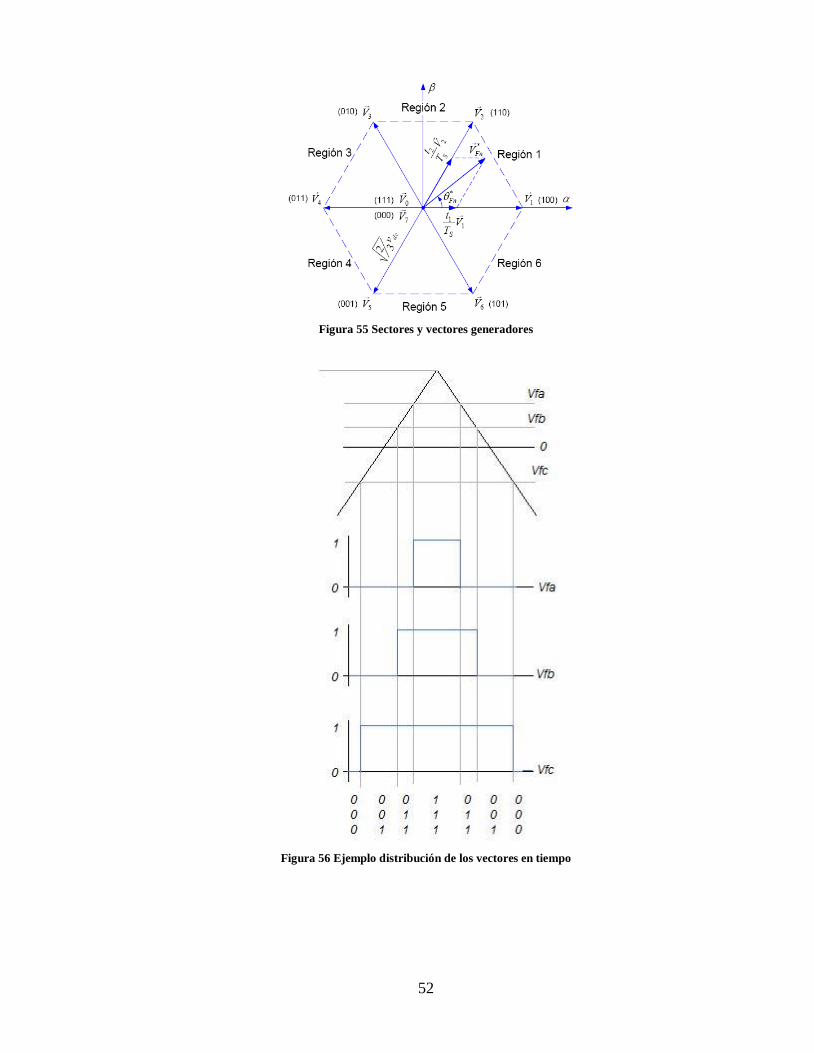
52
Figura 55 Sectores y vectores generadores
Figura 56 Ejemplo distribución de los vectores en tiempo
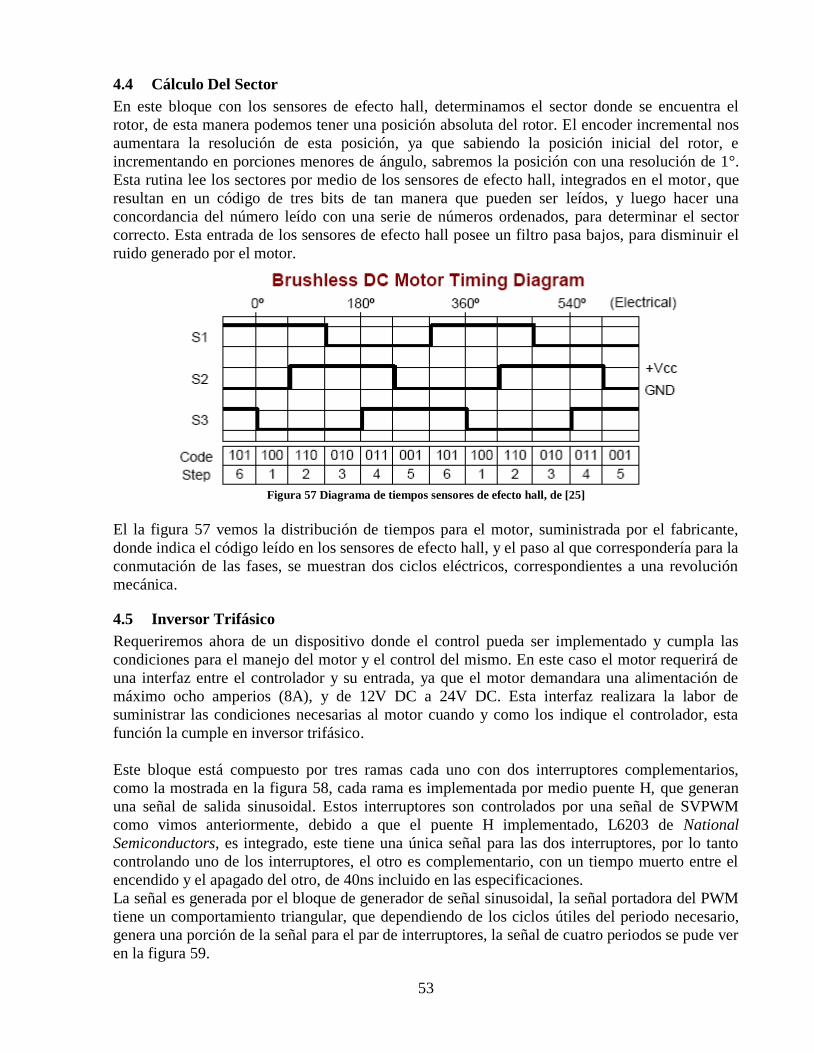
53
4.4 Cálculo Del Sector
En este bloque con los sensores de efecto hall, determinamos el sector donde se encuentra el
rotor, de esta manera podemos tener una posición absoluta del rotor. El encoder incremental nos
aumentara la resolución de esta posición, ya que sabiendo la posición inicial del rotor, e
incrementando en porciones menores de ángulo, sabremos la posición con una resolución de 1°.
Esta rutina lee los sectores por medio de los sensores de efecto hall, integrados en el motor, que
resultan en un código de tres bits de tan manera que pueden ser leídos, y luego hacer una
concordancia del número leído con una serie de números ordenados, para determinar el sector
correcto. Esta entrada de los sensores de efecto hall posee un filtro pasa bajos, para disminuir el
ruido generado por el motor.
Figura 57 Diagrama de tiempos sensores de efecto hall, de [25]
El la figura 57 vemos la distribución de tiempos para el motor, suministrada por el fabricante,
donde indica el código leído en los sensores de efecto hall, y el paso al que correspondería para la
conmutación de las fases, se muestran dos ciclos eléctricos, correspondientes a una revolución
mecánica.
4.5 Inversor Trifásico
Requeriremos ahora de un dispositivo donde el control pueda ser implementado y cumpla las
condiciones para el manejo del motor y el control del mismo. En este caso el motor requerirá de
una interfaz entre el controlador y su entrada, ya que el motor demandara una alimentación de
máximo ocho amperios (8A), y de 12V DC a 24V DC. Esta interfaz realizara la labor de
suministrar las condiciones necesarias al motor cuando y como los indique el controlador, esta
función la cumple en inversor trifásico.
Este bloque está compuesto por tres ramas cada uno con dos interruptores complementarios,
como la mostrada en la figura 58, cada rama es implementada por medio puente H, que generan
una señal de salida sinusoidal. Estos interruptores son controlados por una señal de SVPWM
como vimos anteriormente, debido a que el puente H implementado, L6203 de National
Semiconductors, es integrado, este tiene una única señal para las dos interruptores, por lo tanto
controlando uno de los interruptores, el otro es complementario, con un tiempo muerto entre el
encendido y el apagado del otro, de 40ns incluido en las especificaciones.
La señal es generada por el bloque de generador de señal sinusoidal, la señal portadora del PWM
tiene un comportamiento triangular, que dependiendo de los ciclos útiles del periodo necesario,
genera una porción de la señal para el par de interruptores, la señal de cuatro periodos se pude ver
en la figura 59.
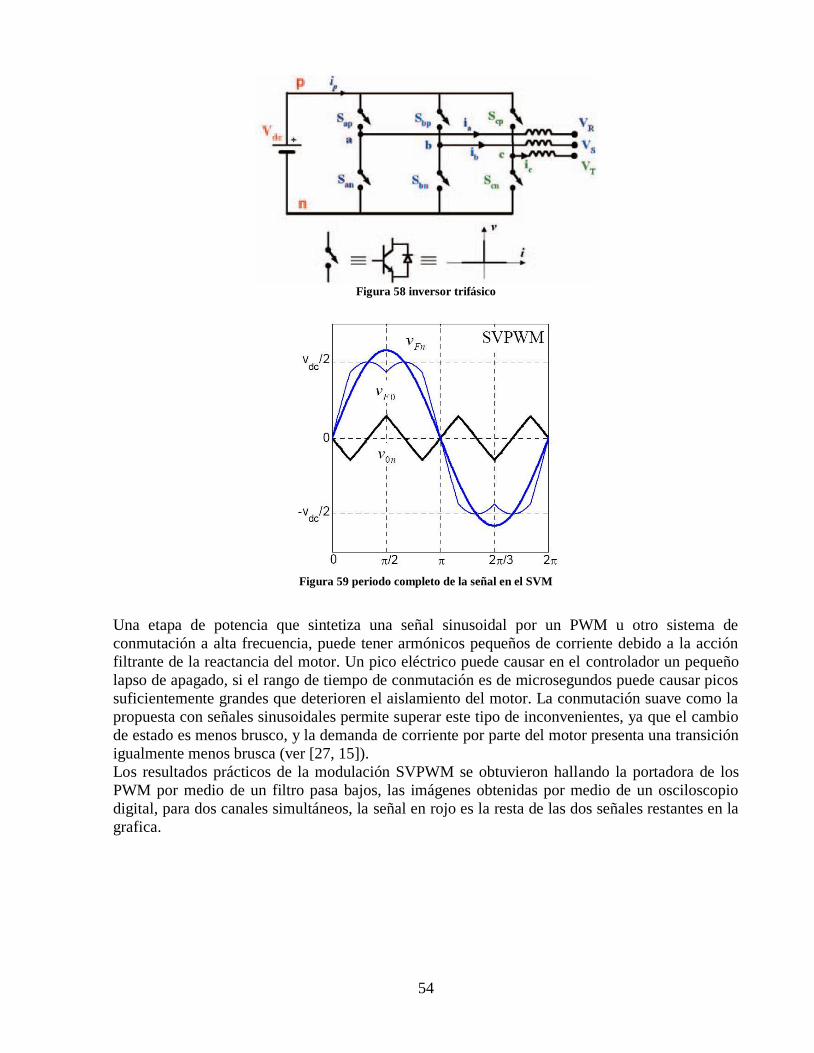
54
Figura 58 inversor trifásico
Figura 59 periodo completo de la señal en el SVM
Una etapa de potencia que sintetiza una señal sinusoidal por un PWM u otro sistema de
conmutación a alta frecuencia, puede tener armónicos pequeños de corriente debido a la acción
filtrante de la reactancia del motor. Un pico eléctrico puede causar en el controlador un pequeño
lapso de apagado, si el rango de tiempo de conmutación es de microsegundos puede causar picos
suficientemente grandes que deterioren el aislamiento del motor. La conmutación suave como la
propuesta con señales sinusoidales permite superar este tipo de inconvenientes, ya que el cambio
de estado es menos brusco, y la demanda de corriente por parte del motor presenta una transición
igualmente menos brusca (ver [27, 15]).
Los resultados prácticos de la modulación SVPWM se obtuvieron hallando la portadora de los
PWM por medio de un filtro pasa bajos, las imágenes obtenidas por medio de un osciloscopio
digital, para dos canales simultáneos, la señal en rojo es la resta de las dos señales restantes en la
grafica.
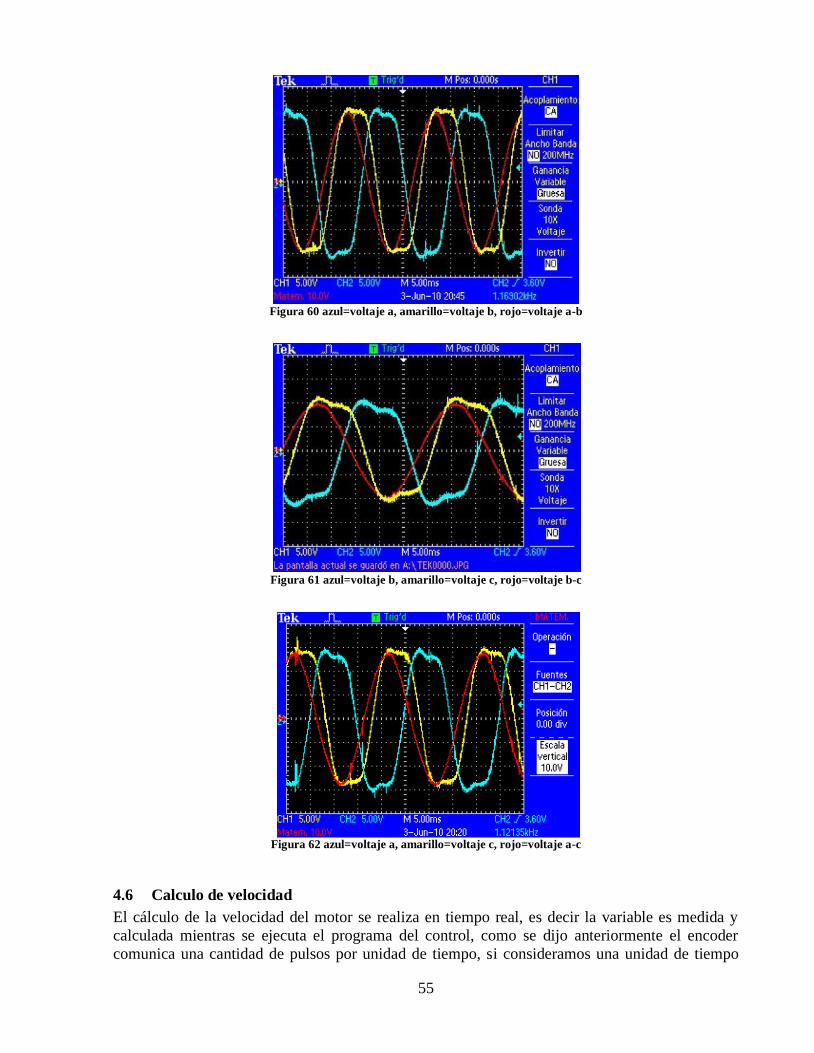
55
Figura 60 azul=voltaje a, amarillo=voltaje b, rojo=voltaje a-b
Figura 61 azul=voltaje b, amarillo=voltaje c, rojo=voltaje b-c
Figura 62 azul=voltaje a, amarillo=voltaje c, rojo=voltaje a-c
4.6 Calculo de velocidad
El cálculo de la velocidad del motor se realiza en tiempo real, es decir la variable es medida y
calculada mientras se ejecuta el programa del control, como se dijo anteriormente el encoder
comunica una cantidad de pulsos por unidad de tiempo, si consideramos una unidad de tiempo
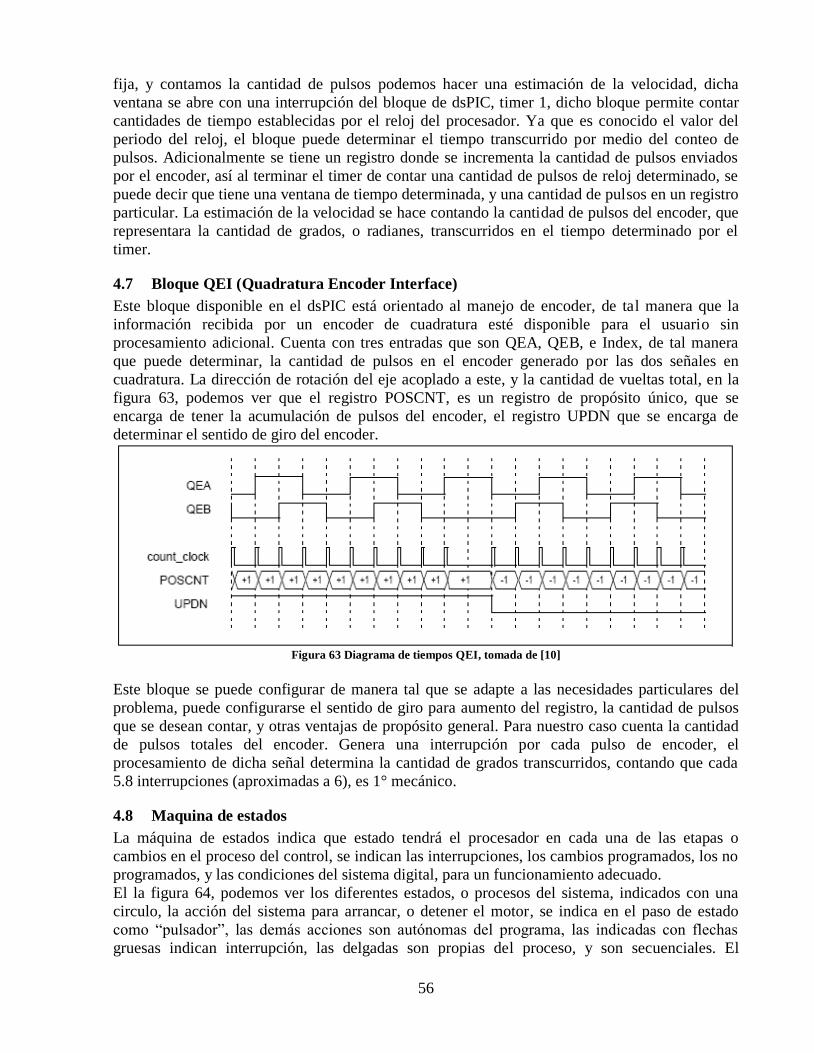
56
fija, y contamos la cantidad de pulsos podemos hacer una estimación de la velocidad, dicha
ventana se abre con una interrupción del bloque de dsPIC, timer 1, dicho bloque permite contar
cantidades de tiempo establecidas por el reloj del procesador. Ya que es conocido el valor del
periodo del reloj, el bloque puede determinar el tiempo transcurrido por medio del conteo de
pulsos. Adicionalmente se tiene un registro donde se incrementa la cantidad de pulsos enviados
por el encoder, así al terminar el timer de contar una cantidad de pulsos de reloj determinado, se
puede decir que tiene una ventana de tiempo determinada, y una cantidad de pulsos en un registro
particular. La estimación de la velocidad se hace contando la cantidad de pulsos del encoder, que
representara la cantidad de grados, o radianes, transcurridos en el tiempo determinado por el
timer.
4.7 Bloque QEI (Quadratura Encoder Interface)
Este bloque disponible en el dsPIC está orientado al manejo de encoder, de tal manera que la
información recibida por un encoder de cuadratura esté disponible para el usuario sin
procesamiento adicional. Cuenta con tres entradas que son QEA, QEB, e Index, de tal manera
que puede determinar, la cantidad de pulsos en el encoder generado por las dos señales en
cuadratura. La dirección de rotación del eje acoplado a este, y la cantidad de vueltas total, en la
figura 63, podemos ver que el registro POSCNT, es un registro de propósito único, que se
encarga de tener la acumulación de pulsos del encoder, el registro UPDN que se encarga de
determinar el sentido de giro del encoder.
Figura 63 Diagrama de tiempos QEI, tomada de [10]
Este bloque se puede configurar de manera tal que se adapte a las necesidades particulares del
problema, puede configurarse el sentido de giro para aumento del registro, la cantidad de pulsos
que se desean contar, y otras ventajas de propósito general. Para nuestro caso cuenta la cantidad
de pulsos totales del encoder. Genera una interrupción por cada pulso de encoder, el
procesamiento de dicha señal determina la cantidad de grados transcurridos, contando que cada
5.8 interrupciones (aproximadas a 6), es 1° mecánico.
4.8 Maquina de estados
La máquina de estados indica que estado tendrá el procesador en cada una de las etapas o
cambios en el proceso del control, se indican las interrupciones, los cambios programados, los no
programados, y las condiciones del sistema digital, para un funcionamiento adecuado.
El la figura 64, podemos ver los diferentes estados, o procesos del sistema, indicados con una
circulo, la acción del sistema para arrancar, o detener el motor, se indica en el paso de estado
como “pulsador”, las demás acciones son autónomas del programa, las indicadas con flechas
gruesas indican interrupción, las delgadas son propias del proceso, y son secuenciales. El
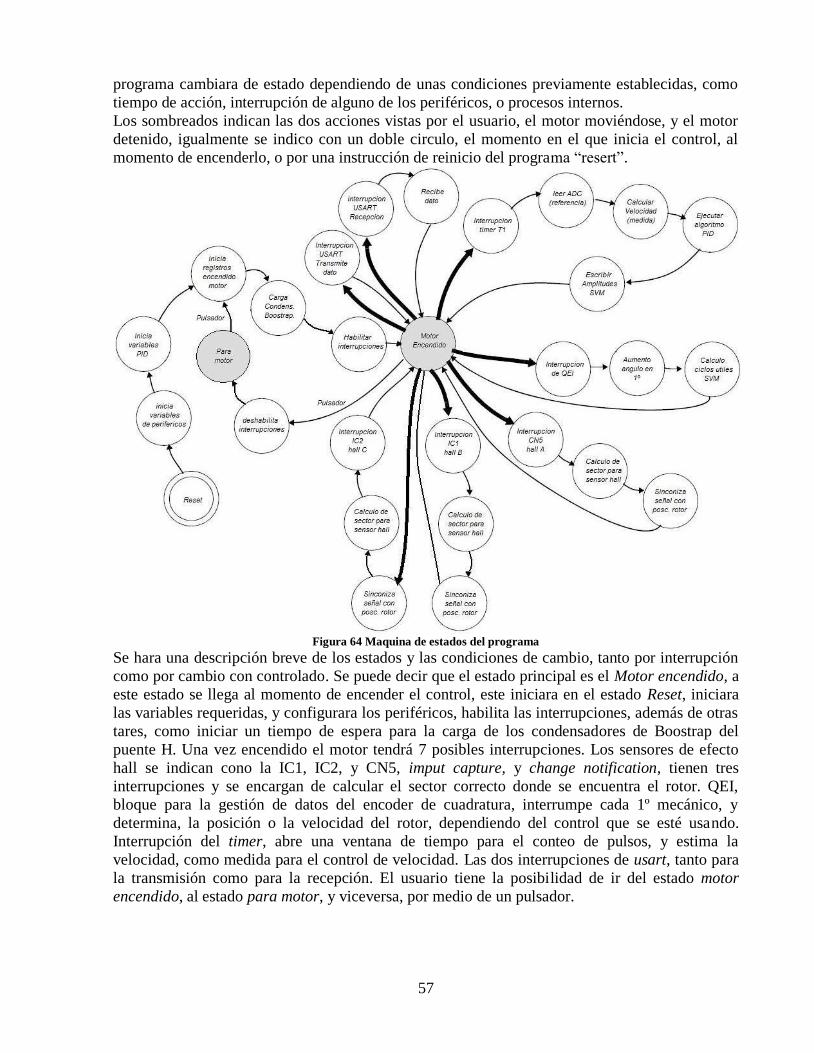
57
programa cambiara de estado dependiendo de unas condiciones previamente establecidas, como
tiempo de acción, interrupción de alguno de los periféricos, o procesos internos.
Los sombreados indican las dos acciones vistas por el usuario, el motor moviéndose, y el motor
detenido, igualmente se indico con un doble circulo, el momento en el que inicia el control, al
momento de encenderlo, o por una instrucción de reinicio del programa “resert”.
Figura 64 Maquina de estados del programa
Se hara una descripción breve de los estados y las condiciones de cambio, tanto por interrupción
como por cambio con controlado. Se puede decir que el estado principal es el Motor encendido, a
este estado se llega al momento de encender el control, este iniciara en el estado Reset, iniciara
las variables requeridas, y configurara los periféricos, habilita las interrupciones, además de otras
tares, como iniciar un tiempo de espera para la carga de los condensadores de Boostrap del
puente H. Una vez encendido el motor tendrá 7 posibles interrupciones. Los sensores de efecto
hall se indican cono la IC1, IC2, y CN5, imput capture, y change notification, tienen tres
interrupciones y se encargan de calcular el sector correcto donde se encuentra el rotor. QEI,
bloque para la gestión de datos del encoder de cuadratura, interrumpe cada 1º mecánico, y
determina, la posición o la velocidad del rotor, dependiendo del control que se esté usando.
Interrupción del timer, abre una ventana de tiempo para el conteo de pulsos, y estima la
velocidad, como medida para el control de velocidad. Las dos interrupciones de usart, tanto para
la transmisión como para la recepción. El usuario tiene la posibilidad de ir del estado motor
encendido, al estado para motor, y viceversa, por medio de un pulsador.
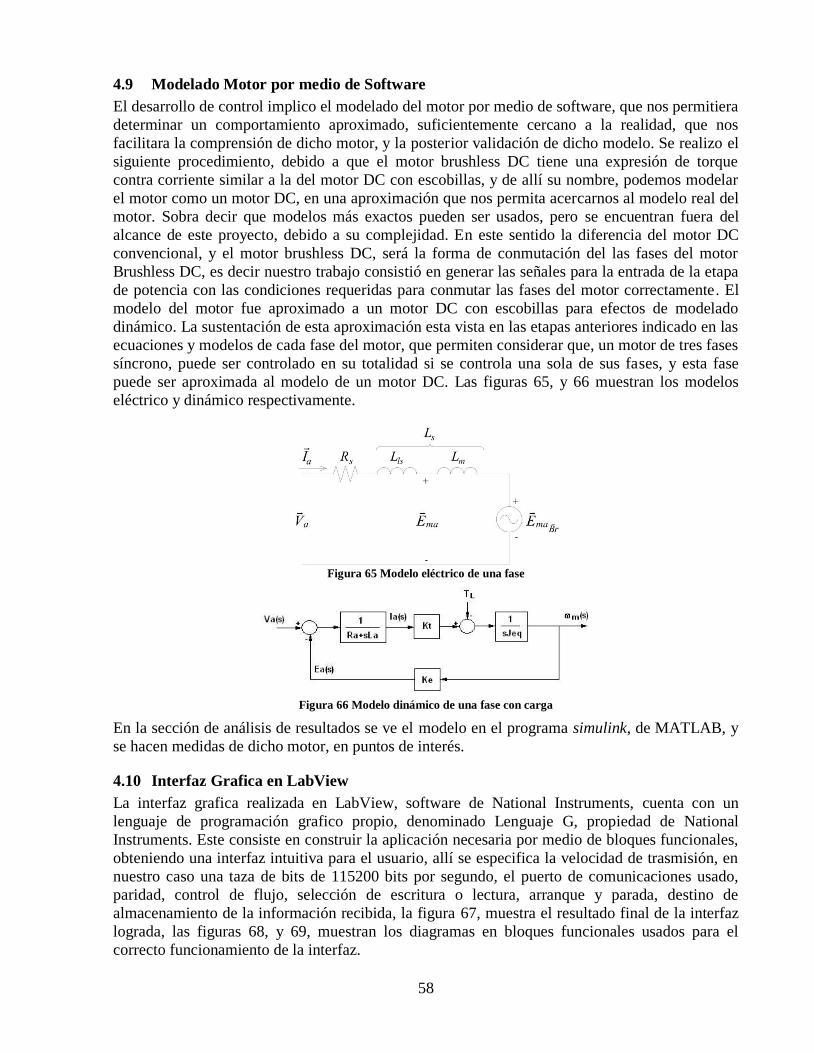
58
4.9 Modelado Motor por medio de Software
El desarrollo de control implico el modelado del motor por medio de software, que nos permitiera
determinar un comportamiento aproximado, suficientemente cercano a la realidad, que nos
facilitara la comprensión de dicho motor, y la posterior validación de dicho modelo. Se realizo el
siguiente procedimiento, debido a que el motor brushless DC tiene una expresión de torque
contra corriente similar a la del motor DC con escobillas, y de allí su nombre, podemos modelar
el motor como un motor DC, en una aproximación que nos permita acercarnos al modelo real del
motor. Sobra decir que modelos más exactos pueden ser usados, pero se encuentran fuera del
alcance de este proyecto, debido a su complejidad. En este sentido la diferencia del motor DC
convencional, y el motor brushless DC, será la forma de conmutación del las fases del motor
Brushless DC, es decir nuestro trabajo consistió en generar las señales para la entrada de la etapa
de potencia con las condiciones requeridas para conmutar las fases del motor correctamente. El
modelo del motor fue aproximado a un motor DC con escobillas para efectos de modelado
dinámico. La sustentación de esta aproximación esta vista en las etapas anteriores indicado en las
ecuaciones y modelos de cada fase del motor, que permiten considerar que, un motor de tres fases
síncrono, puede ser controlado en su totalidad si se controla una sola de sus fases, y esta fase
puede ser aproximada al modelo de un motor DC. Las figuras 65, y 66 muestran los modelos
eléctrico y dinámico respectivamente.
Figura 65 Modelo eléctrico de una fase
Figura 66 Modelo dinámico de una fase con carga
En la sección de análisis de resultados se ve el modelo en el programa simulink, de MATLAB, y
se hacen medidas de dicho motor, en puntos de interés.
4.10 Interfaz Grafica en LabView
La interfaz grafica realizada en LabView, software de National Instruments, cuenta con un
lenguaje de programación grafico propio, denominado Lenguaje G, propiedad de National
Instruments. Este consiste en construir la aplicación necesaria por medio de bloques funcionales,
obteniendo una interfaz intuitiva para el usuario, allí se especifica la velocidad de trasmisión, en
nuestro caso una taza de bits de 115200 bits por segundo, el puerto de comunicaciones usado,
paridad, control de flujo, selección de escritura o lectura, arranque y parada, destino de
almacenamiento de la información recibida, la figura 67, muestra el resultado final de la interfaz
lograda, las figuras 68, y 69, muestran los diagramas en bloques funcionales usados para el
correcto funcionamiento de la interfaz.
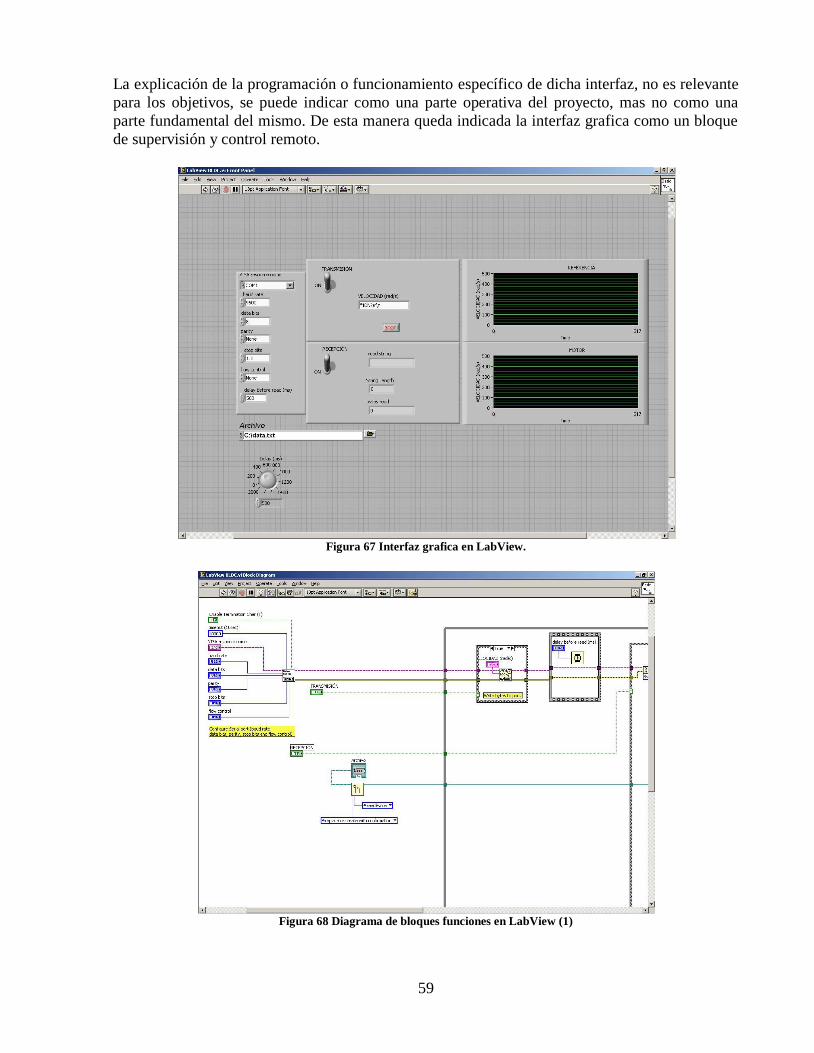
59
La explicación de la programación o funcionamiento específico de dicha interfaz, no es relevante
para los objetivos, se puede indicar como una parte operativa del proyecto, mas no como una
parte fundamental del mismo. De esta manera queda indicada la interfaz grafica como un bloque
de supervisión y control remoto.
Figura 67 Interfaz grafica en LabView.
Figura 68 Diagrama de bloques funciones en LabView (1)
60
Figura 69 Diagrama de bloques funciones en LabView (2)
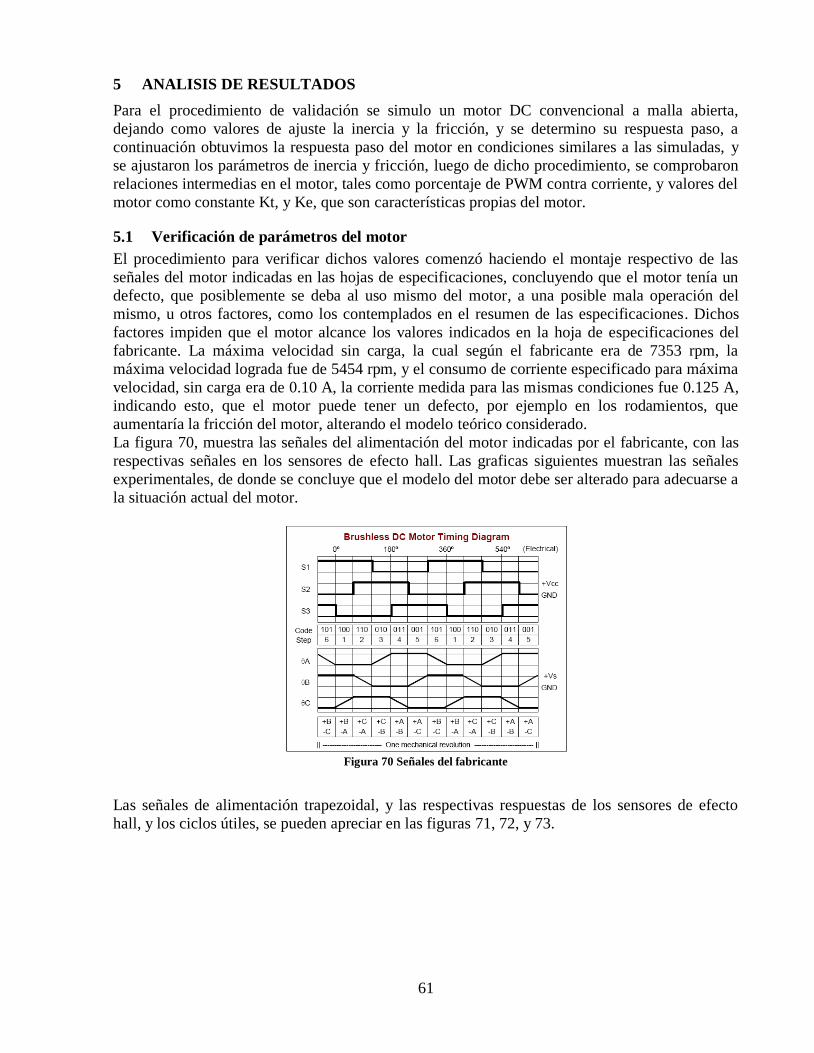
61
5 ANALISIS DE RESULTADOS
Para el procedimiento de validación se simulo un motor DC convencional a malla abierta,
dejando como valores de ajuste la inercia y la fricción, y se determino su respuesta paso, a
continuación obtuvimos la respuesta paso del motor en condiciones similares a las simuladas, y
se ajustaron los parámetros de inercia y fricción, luego de dicho procedimiento, se comprobaron
relaciones intermedias en el motor, tales como porcentaje de PWM contra corriente, y valores del
motor como constante Kt, y Ke, que son características propias del motor.
5.1 Verificación de parámetros del motor
El procedimiento para verificar dichos valores comenzó haciendo el montaje respectivo de las
señales del motor indicadas en las hojas de especificaciones, concluyendo que el motor tenía un
defecto, que posiblemente se deba al uso mismo del motor, a una posible mala operación del
mismo, u otros factores, como los contemplados en el resumen de las especificaciones. Dichos
factores impiden que el motor alcance los valores indicados en la hoja de especificaciones del
fabricante. La máxima velocidad sin carga, la cual según el fabricante era de 7353 rpm, la
máxima velocidad lograda fue de 5454 rpm, y el consumo de corriente especificado para máxima
velocidad, sin carga era de 0.10 A, la corriente medida para las mismas condiciones fue 0.125 A,
indicando esto, que el motor puede tener un defecto, por ejemplo en los rodamientos, que
aumentaría la fricción del motor, alterando el modelo teórico considerado.
La figura 70, muestra las señales del alimentación del motor indicadas por el fabricante, con las
respectivas señales en los sensores de efecto hall. Las graficas siguientes muestran las señales
experimentales, de donde se concluye que el modelo del motor debe ser alterado para adecuarse a
la situación actual del motor.
Figura 70 Señales del fabricante
Las señales de alimentación trapezoidal, y las respectivas respuestas de los sensores de efecto
hall, y los ciclos útiles, se pueden apreciar en las figuras 71, 72, y 73.
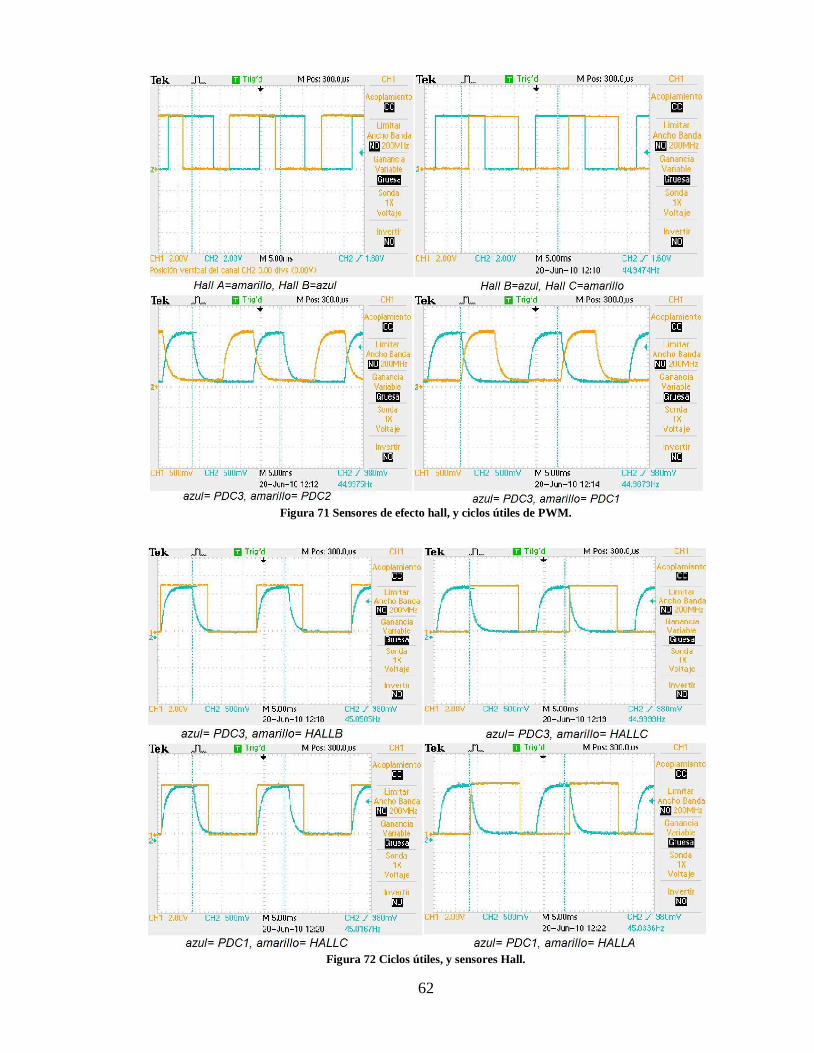
62
Figura 71 Sensores de efecto hall, y ciclos útiles de PWM.
Figura 72 Ciclos útiles, y sensores Hall.
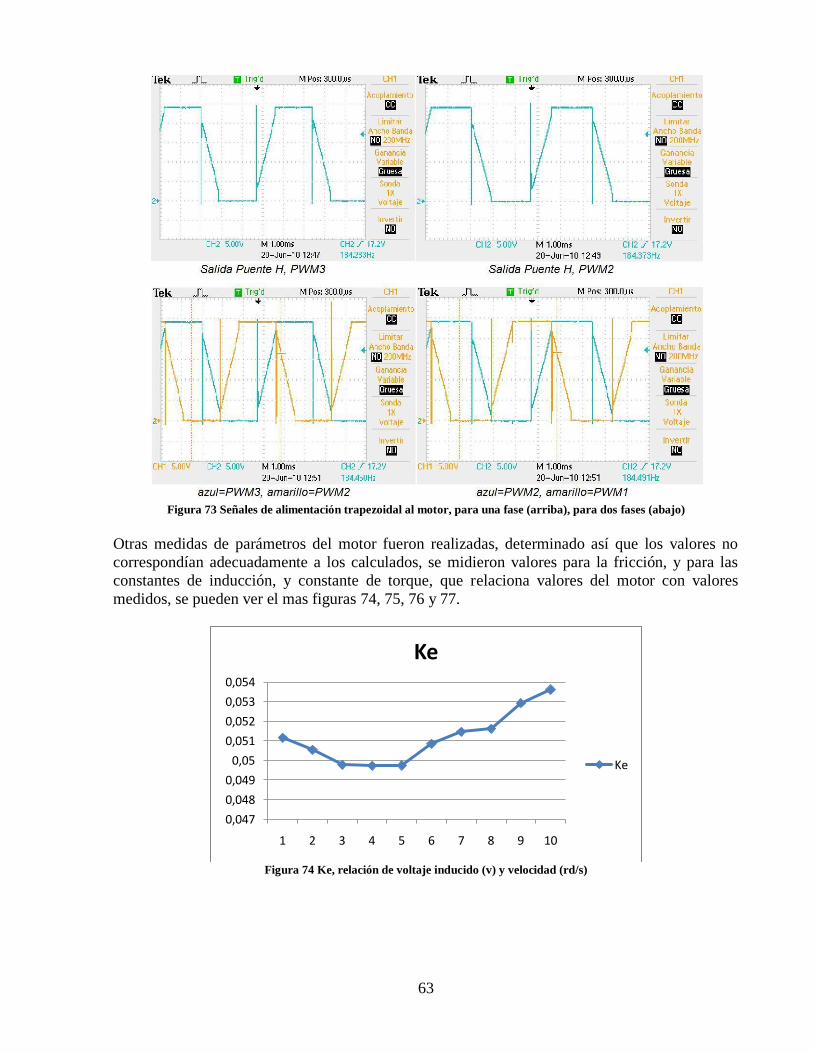
63
Figura 73 Señales de alimentación trapezoidal al motor, para una fase (arriba), para dos fases (abajo)
Otras medidas de parámetros del motor fueron realizadas, determinado así que los valores no
correspondían adecuadamente a los calculados, se midieron valores para la fricción, y para las
constantes de inducción, y constante de torque, que relaciona valores del motor con valores
medidos, se pueden ver el mas figuras 74, 75, 76 y 77.
Figura 74 Ke, relación de voltaje inducido (v) y velocidad (rd/s)
0,047
0,048
0,049
0,05
0,051
0,052
0,053
0,054
1 2 3 4 5 6 7 8 9 10
Ke
Ke
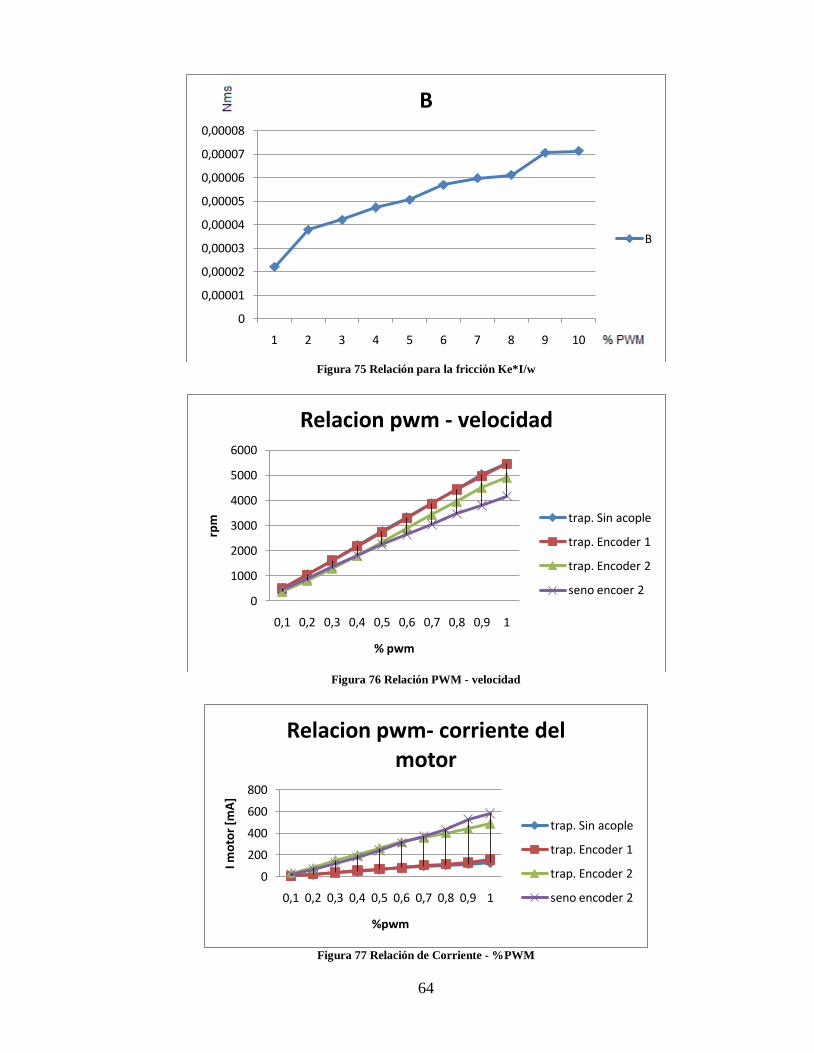
64
Figura 75 Relación para la fricción Ke*I/w
Figura 76 Relación PWM - velocidad
Figura 77 Relación de Corriente - %PWM
0
0,00001
0,00002
0,00003
0,00004
0,00005
0,00006
0,00007
0,00008
1 2 3 4 5 6 7 8 9 10
B
B
0
1000
2000
3000
4000
5000
6000
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
rpm
% pwm
Relacion pwm - velocidad
trap. Sin acople
trap. Encoder 1
trap. Encoder 2
seno encoer 2
0
200
400
600
800
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
I mo
tor
[mA
]
%pwm
Relacion pwm- corriente del motor
trap. Sin acople
trap. Encoder 1
trap. Encoder 2
seno encoder 2
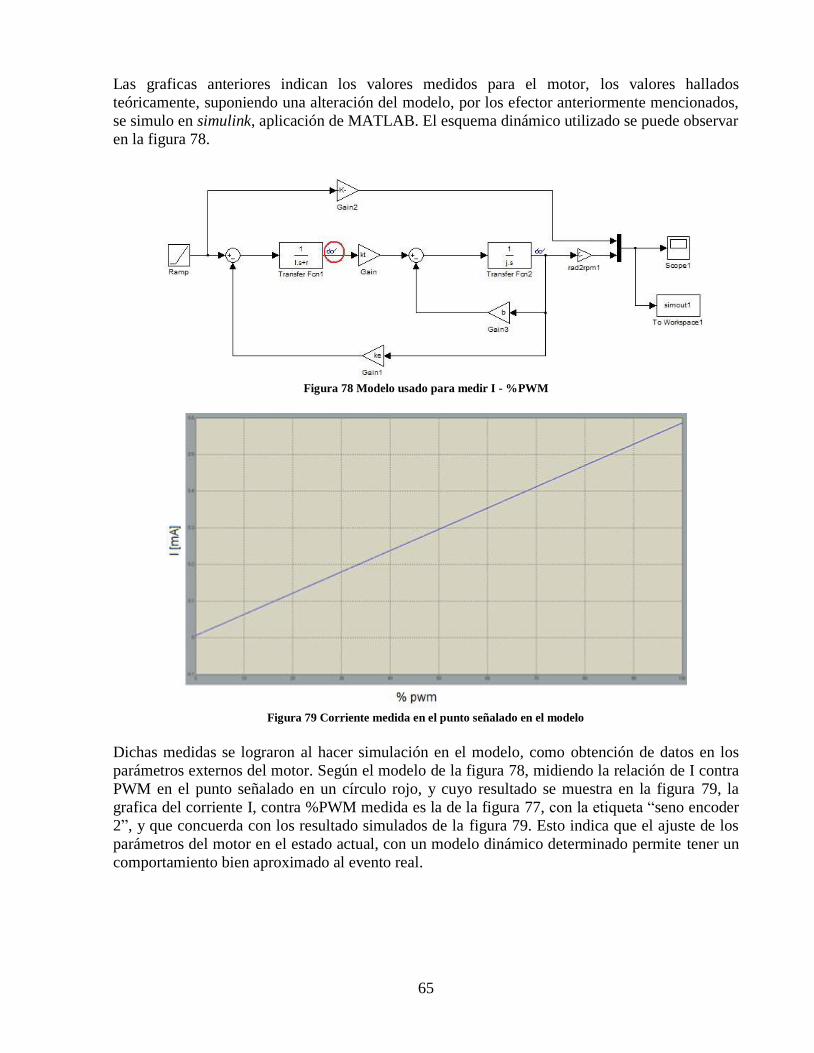
65
Las graficas anteriores indican los valores medidos para el motor, los valores hallados
teóricamente, suponiendo una alteración del modelo, por los efector anteriormente mencionados,
se simulo en simulink, aplicación de MATLAB. El esquema dinámico utilizado se puede observar
en la figura 78.
Figura 78 Modelo usado para medir I - %PWM
Figura 79 Corriente medida en el punto señalado en el modelo
Dichas medidas se lograron al hacer simulación en el modelo, como obtención de datos en los
parámetros externos del motor. Según el modelo de la figura 78, midiendo la relación de I contra
PWM en el punto señalado en un círculo rojo, y cuyo resultado se muestra en la figura 79, la
grafica del corriente I, contra %PWM medida es la de la figura 77, con la etiqueta “seno encoder
2”, y que concuerda con los resultado simulados de la figura 79. Esto indica que el ajuste de los
parámetros del motor en el estado actual, con un modelo dinámico determinado permite tener un
comportamiento bien aproximado al evento real.
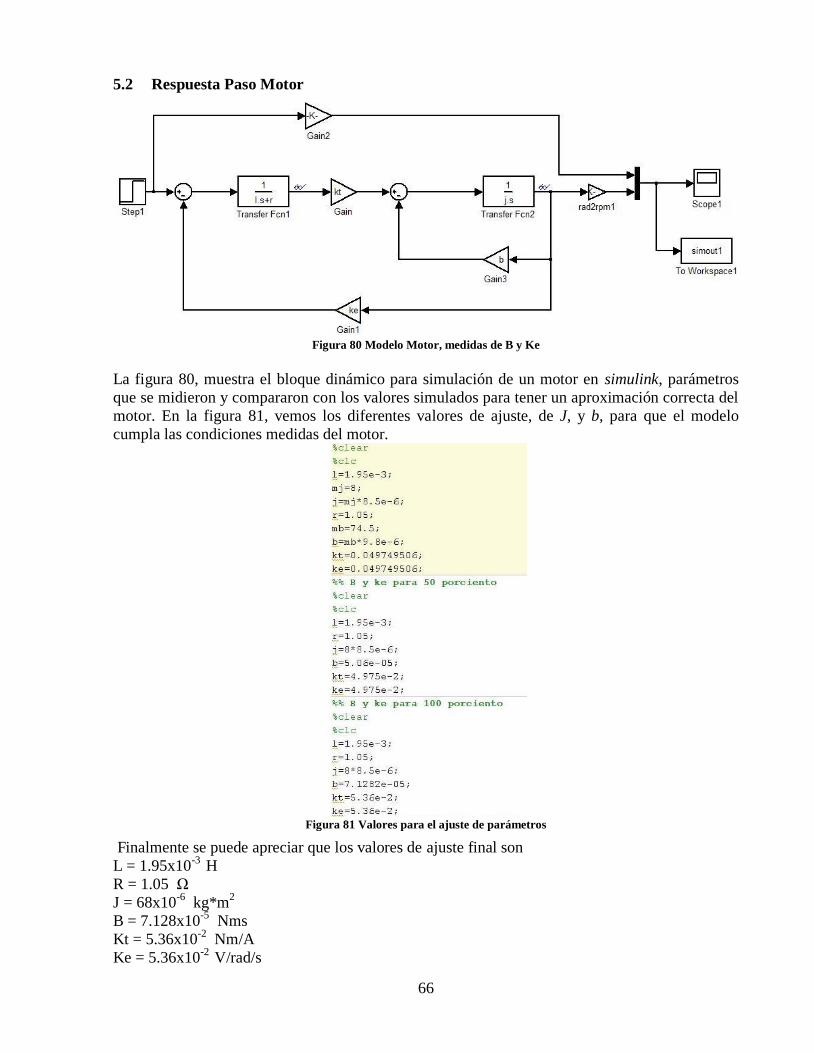
66
5.2 Respuesta Paso Motor
Figura 80 Modelo Motor, medidas de B y Ke
La figura 80, muestra el bloque dinámico para simulación de un motor en simulink, parámetros
que se midieron y compararon con los valores simulados para tener un aproximación correcta del
motor. En la figura 81, vemos los diferentes valores de ajuste, de J, y b, para que el modelo
cumpla las condiciones medidas del motor.
Figura 81 Valores para el ajuste de parámetros
Finalmente se puede apreciar que los valores de ajuste final son
L = 1.95x10-3
H
R = 1.05 Ω
J = 68x10-6
kg*m2
B = 7.128x10-5
Nms
Kt = 5.36x10-2
Nm/A
Ke = 5.36x10-2
V/rad/s
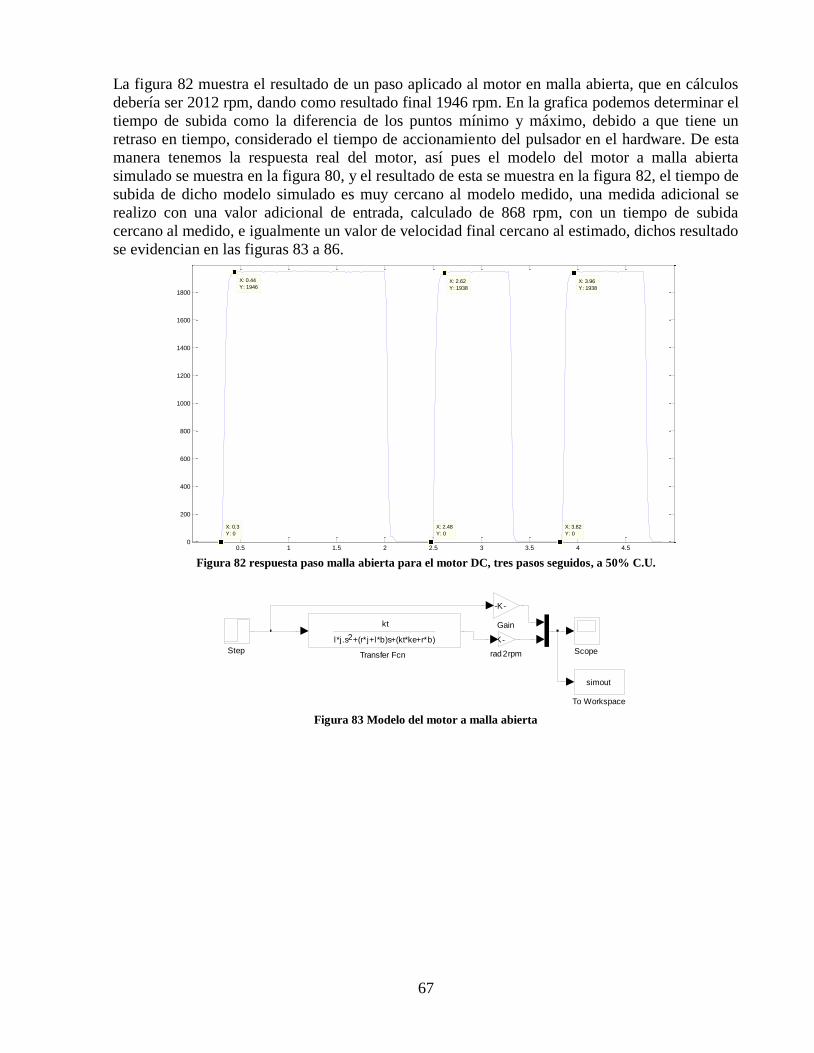
67
La figura 82 muestra el resultado de un paso aplicado al motor en malla abierta, que en cálculos
debería ser 2012 rpm, dando como resultado final 1946 rpm. En la grafica podemos determinar el
tiempo de subida como la diferencia de los puntos mínimo y máximo, debido a que tiene un
retraso en tiempo, considerado el tiempo de accionamiento del pulsador en el hardware. De esta
manera tenemos la respuesta real del motor, así pues el modelo del motor a malla abierta
simulado se muestra en la figura 80, y el resultado de esta se muestra en la figura 82, el tiempo de
subida de dicho modelo simulado es muy cercano al modelo medido, una medida adicional se
realizo con una valor adicional de entrada, calculado de 868 rpm, con un tiempo de subida
cercano al medido, e igualmente un valor de velocidad final cercano al estimado, dichos resultado
se evidencian en las figuras 83 a 86.
Figura 82 respuesta paso malla abierta para el motor DC, tres pasos seguidos, a 50% C.U.
Figura 83 Modelo del motor a malla abierta
0.5 1 1.5 2 2.5 3 3.5 4 4.50
200
400
600
800
1000
1200
1400
1600
1800
X: 0.3
Y: 0
X: 0.44
Y: 1946
X: 2.48
Y: 0
X: 2.62
Y: 1938
X: 3.82
Y: 0
X: 3.96
Y: 1938
rad2rpm
K-
Transfer Fcn
kt
l*j.s +(r*j+l*b)s+(kt*ke+r*b)2
To Workspace
simout
Step Scope
Gain
-K-
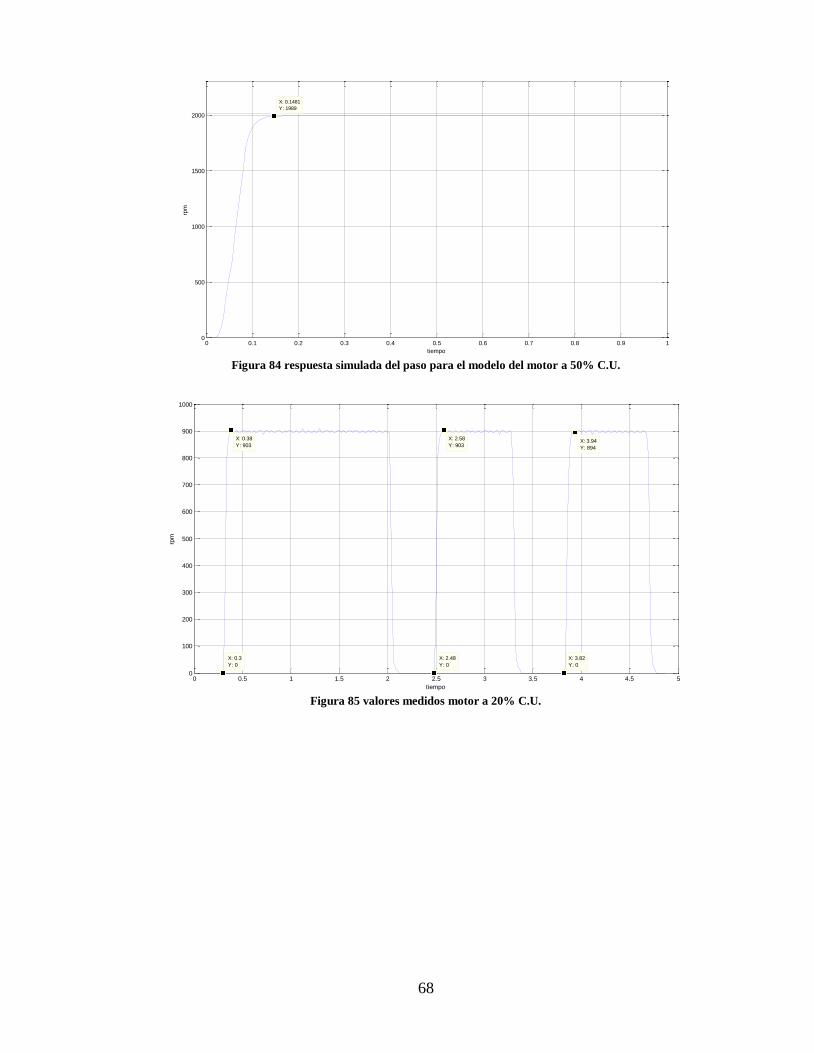
68
Figura 84 respuesta simulada del paso para el modelo del motor a 50% C.U.
Figura 85 valores medidos motor a 20% C.U.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
500
1000
1500
2000
X: 0.1481
Y: 1989
tiempo
rpm
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
100
200
300
400
500
600
700
800
900
1000
X: 0.3
Y: 0
tiempo
rpm
X: 2.48
Y: 0
X: 0.38
Y: 903
X: 2.58
Y: 903
X: 3.82
Y: 0
X: 3.94
Y: 894
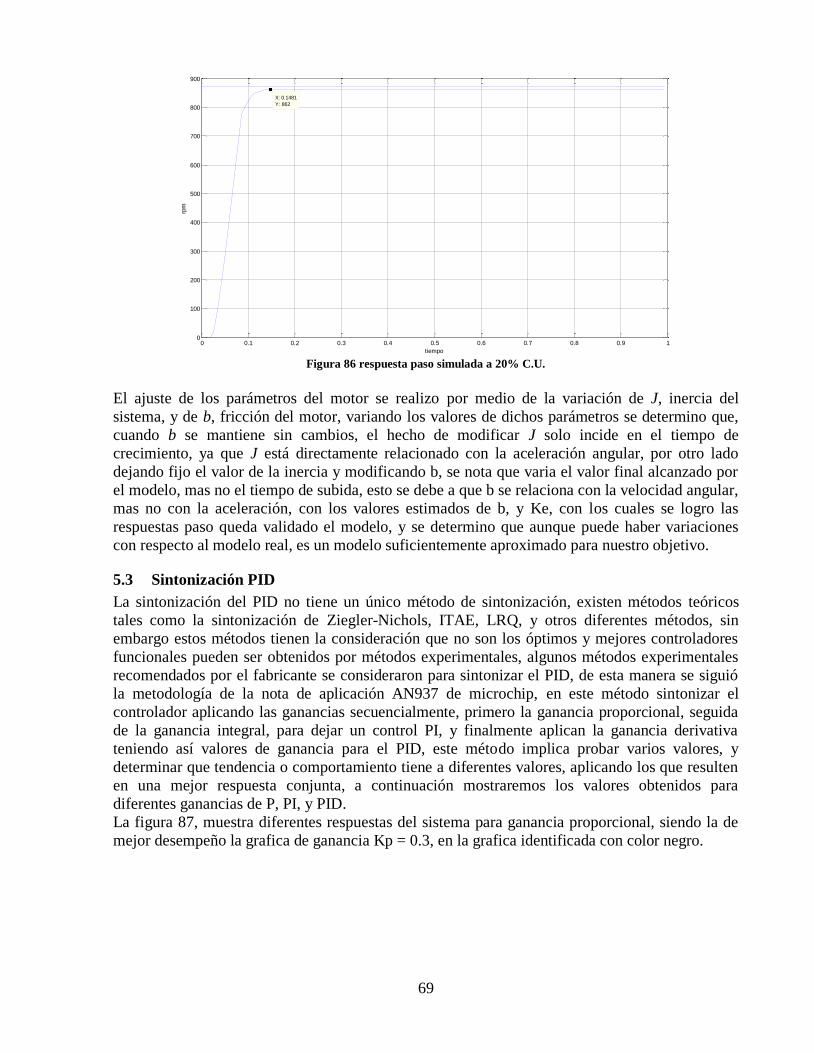
69
Figura 86 respuesta paso simulada a 20% C.U.
El ajuste de los parámetros del motor se realizo por medio de la variación de J, inercia del
sistema, y de b, fricción del motor, variando los valores de dichos parámetros se determino que,
cuando b se mantiene sin cambios, el hecho de modificar J solo incide en el tiempo de
crecimiento, ya que J está directamente relacionado con la aceleración angular, por otro lado
dejando fijo el valor de la inercia y modificando b, se nota que varia el valor final alcanzado por
el modelo, mas no el tiempo de subida, esto se debe a que b se relaciona con la velocidad angular,
mas no con la aceleración, con los valores estimados de b, y Ke, con los cuales se logro las
respuestas paso queda validado el modelo, y se determino que aunque puede haber variaciones
con respecto al modelo real, es un modelo suficientemente aproximado para nuestro objetivo.
5.3 Sintonización PID
La sintonización del PID no tiene un único método de sintonización, existen métodos teóricos
tales como la sintonización de Ziegler-Nichols, ITAE, LRQ, y otros diferentes métodos, sin
embargo estos métodos tienen la consideración que no son los óptimos y mejores controladores
funcionales pueden ser obtenidos por métodos experimentales, algunos métodos experimentales
recomendados por el fabricante se consideraron para sintonizar el PID, de esta manera se siguió
la metodología de la nota de aplicación AN937 de microchip, en este método sintonizar el
controlador aplicando las ganancias secuencialmente, primero la ganancia proporcional, seguida
de la ganancia integral, para dejar un control PI, y finalmente aplican la ganancia derivativa
teniendo así valores de ganancia para el PID, este método implica probar varios valores, y
determinar que tendencia o comportamiento tiene a diferentes valores, aplicando los que resulten
en una mejor respuesta conjunta, a continuación mostraremos los valores obtenidos para
diferentes ganancias de P, PI, y PID.
La figura 87, muestra diferentes respuestas del sistema para ganancia proporcional, siendo la de
mejor desempeño la grafica de ganancia Kp = 0.3, en la grafica identificada con color negro.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
100
200
300
400
500
600
700
800
900
X: 0.1481
Y: 862
tiempo
rpm
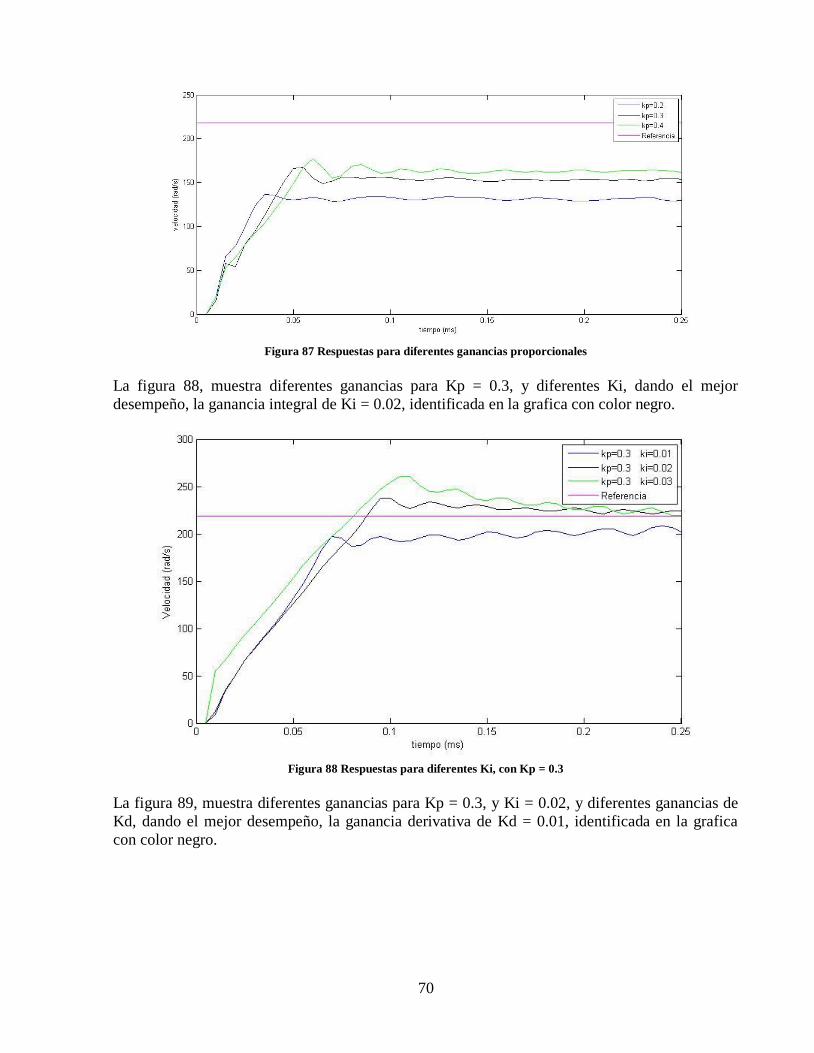
70
Figura 87 Respuestas para diferentes ganancias proporcionales
La figura 88, muestra diferentes ganancias para Kp = 0.3, y diferentes Ki, dando el mejor
desempeño, la ganancia integral de Ki = 0.02, identificada en la grafica con color negro.
Figura 88 Respuestas para diferentes Ki, con Kp = 0.3
La figura 89, muestra diferentes ganancias para Kp = 0.3, y Ki = 0.02, y diferentes ganancias de
Kd, dando el mejor desempeño, la ganancia derivativa de Kd = 0.01, identificada en la grafica
con color negro.
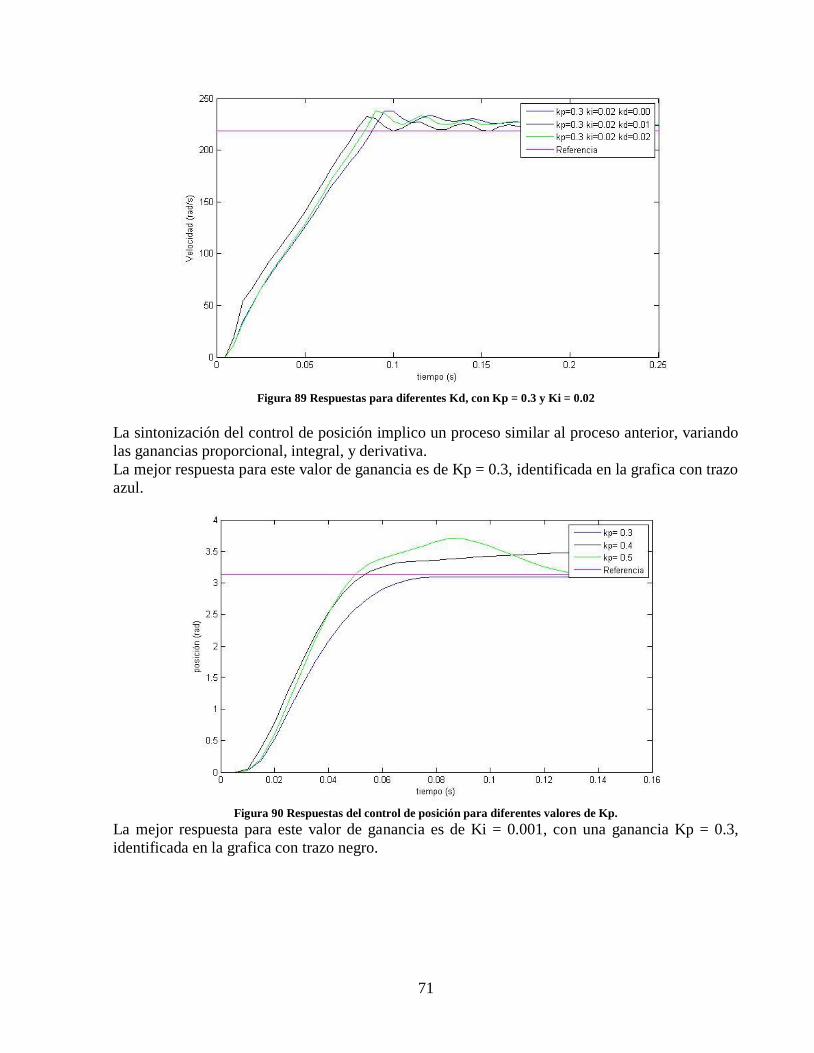
71
Figura 89 Respuestas para diferentes Kd, con Kp = 0.3 y Ki = 0.02
La sintonización del control de posición implico un proceso similar al proceso anterior, variando
las ganancias proporcional, integral, y derivativa.
La mejor respuesta para este valor de ganancia es de Kp = 0.3, identificada en la grafica con trazo
azul.
Figura 90 Respuestas del control de posición para diferentes valores de Kp.
La mejor respuesta para este valor de ganancia es de Ki = 0.001, con una ganancia Kp = 0.3,
identificada en la grafica con trazo negro.
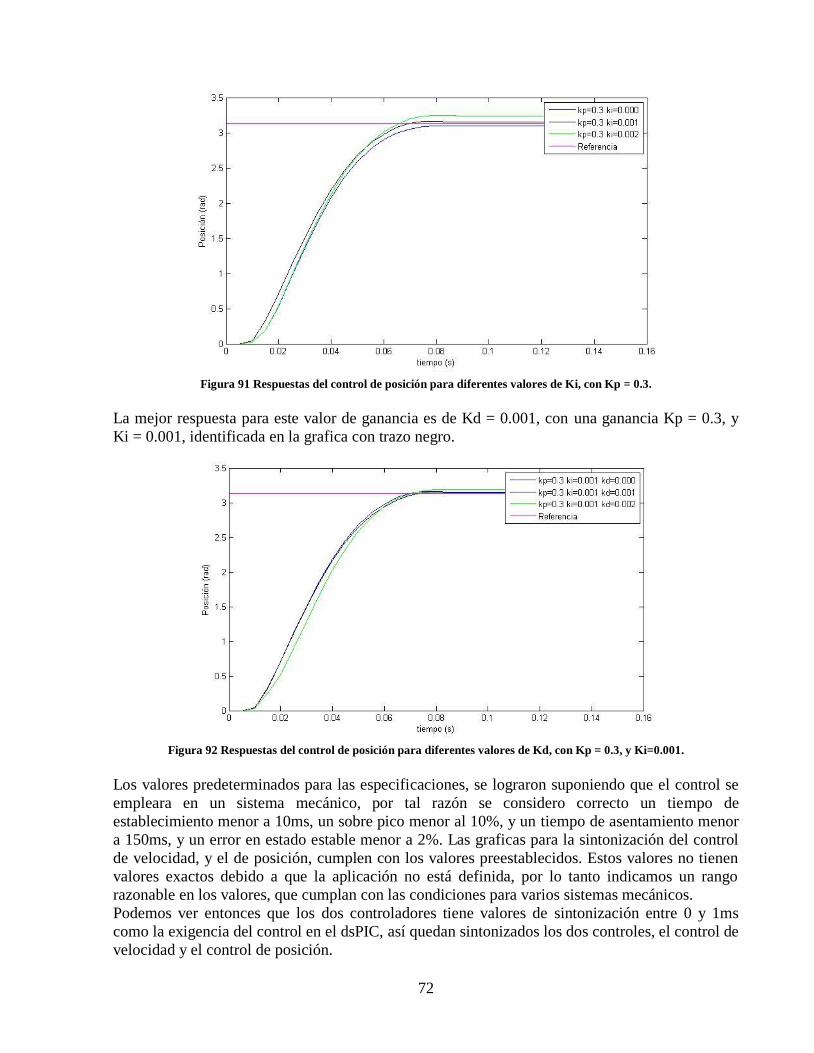
72
Figura 91 Respuestas del control de posición para diferentes valores de Ki, con Kp = 0.3.
La mejor respuesta para este valor de ganancia es de Kd = 0.001, con una ganancia Kp = 0.3, y
Ki = 0.001, identificada en la grafica con trazo negro.
Figura 92 Respuestas del control de posición para diferentes valores de Kd, con Kp = 0.3, y Ki=0.001.
Los valores predeterminados para las especificaciones, se lograron suponiendo que el control se
empleara en un sistema mecánico, por tal razón se considero correcto un tiempo de
establecimiento menor a 10ms, un sobre pico menor al 10%, y un tiempo de asentamiento menor
a 150ms, y un error en estado estable menor a 2%. Las graficas para la sintonización del control
de velocidad, y el de posición, cumplen con los valores preestablecidos. Estos valores no tienen
valores exactos debido a que la aplicación no está definida, por lo tanto indicamos un rango
razonable en los valores, que cumplan con las condiciones para varios sistemas mecánicos.
Podemos ver entonces que los dos controladores tiene valores de sintonización entre 0 y 1ms
como la exigencia del control en el dsPIC, así quedan sintonizados los dos controles, el control de
velocidad y el control de posición.
73
5.4 Costos y Fuentes de Financiación
Los costos como consideraciones de desarrollo para el proyecto se estimaran de la siguiente
manera, las equipos y software necesario se estimaran como un costo mensual de uso, o alquiler,
otros elementos necesarios para el desarrollo que son de carácter permanente en el montaje, se
consideraran como adquiridos, la mano de obra de ingeniero, y técnico, se considera por hora,
estimando que la duración del proyecto aproximadamente es de 8 meses, con jornadas laborales
de 8.5 horas diarias, y 25 días hábiles al mes.
Relacionaremos los costos de manera aproximada, debido a que la gran mayoría tiene un valor
aproximado en dólares, y algunos costos se relacionaran en pesos.
Microprocesador, dsPIC 30f2010 $ 27.000
Circuitos impresos $ 85.000
Encoder incremental US$ 200
Motor Pittman US$ 250
Cables $15.000
Componentes varios $48.000
Costo de hora ingeniero $13.500
Costo mano de obra (hora) $ 7.050
Alquiler de software y equipos (mes) $ 850.000
Total montaje (8 meses) $65’760.000 Las fuentes de financiación son de carácter personal, e involucran a los miembros participes del
trabajo de grado, debido a que no se encuentra otra entidad, o persona, involucrada en el
desarrollo.
74
6 CONCLUSIONES
Como conclusiones del proyecto de grado “control de velocidad y posición de un motor
Brushless DC”, con un carácter general se puede describir exitoso el proyecto, ya que la parte
conceptual, y práctica de la ingeniería se llevo a cabo satisfactoriamente, los objetivos específicos
fueron alcanzados en un 96%, debido a que la comunicación se logro de manera serial con el
estándar RS485, pero no con el protocolo MODBUS, por lo tanto dicho logro no cumplió lo
requerido. Los demás logros estipulados fueron alcanzados satisfactoriamente, los controles
desarrollados como método de prueba de un driver para motor trifásico Brushless DC,
cumplieron los objetivos. Los controles probaron el rango dinámico del driver, y cumplieron con
las exigencias del motor, tanto en características eléctricas, como en mecánicas.
La realización de un control de velocidad por medio de un potenciómetro y un encoder
incremental fue exitoso, se logro generar un código capaz de seguir una referencia que se
determinaba por medio de un potenciómetro. La respuesta paso de este sistema indica que el
tiempo de estabilización fue de 140ms, con un sobre pico menor al 7%, y su velocidad medida en
osciloscopio, se mantiene estable al momento de alcanzar la referencia, es decir el erron en estado
estable, medido fue menor a 2%. La medición de variables del motor arrojo ciertos datos que
variaban de los esperados teóricamente, estas variaciones son diferencias pequeñas con los
esperado, que pueden deberse a diferentes factores. Algunos de estos son factores que influyen en
el desempeño y medida de los parámetros, como lo son los acoples mecánicos entre motor y
encoder, acoples flexibles que no son de fácil modelado, y pueden introducir variaciones en los
resultados esperados, el montaje mecánico debe estar alineado y tener cierta estabilidad física.
Este montaje fue realizado como prototipo de prueba, y las condiciones no son las optimas, sin
embargo fueron suficientes para una buena aproximación de los resultados esperados. Las
respuestas medidas tiene variaciones en estado estable, que dependiendo de la velocidad y la
carga, altera su comportamiento, por lo que podemos concluir que se debe a factores mecánicos,
como vibración por des alineamiento del eje del motor, y encoder, y falta de una mayor robustez
mecánica.
De igual manera las respuestas para el control de posición son satisfactorias, ya que los valores de
posición se alcanzan en tiempo pequeños para sistemas mecánicos, es decir, ya que el sistemas de
control no tiene una aplicación particular, es difícil decir si el tiempo de respuesta es adecuado.
Como criterio de comparación asumimos que los sistemas mecánicos a ser controlados tienen
tiempos de respuestas mayores de mili segundos, y dado que nuestro sistema responde en mili
segundos podemos concluir que dicho sistema se adaptaría fácilmente a un sistema mecánico,
con tiempos de respuesta adecuados para la respuesta del sistema total.
La comunicación establecida permite monitorear el control en tiempo real, ya que se implemento
una interfaz grafica por medio del software LabView, por medio de una comunicación serial, que
permite desde el microcontrolador determinar la variable a monitorear, y graficar dos señales, en
nuestro caso fue la velocidad medida, y la velocidad de referencia, de igual manera se puede
monitorear la posición.
La conmutación de las fases del motor represento una de los mayores trabajos, debido a que la
sincronización de las tres señales por medio de un algoritmo resulto considerablemente laboriosa,
sin embargo se logro el objetivo propuesto de conseguir las tres señales de alimentación por
medio del algoritmo de Space Vector Pulse Width Modulation en un inversor trifásico, que
denominamos driver.
75
Los equipos necesarios para las diferentes pruebas y desarrollos fueron:
Osciloscopio Digital con sus respectivas puntas.
Multímetro Digital.
Fuente de poder dual, con salida de 8 A, o mayor.
Motor Pitman N2311A012.
dsPIC 30f2010, modulo de programación ICD2.
Software MPLAB, Software LabView.
76
7 BIBLIOGRAFIA
1. AN1017 “Sinusoidal control of PMSM motors, with dsPIC30f DSC”, nota de aplicación,
michochip. Inc.
2. AN1078 ejemplo control por orientación de campo sin sensores de efecto hall, nota de
aplicación, michochip. Inc.
3. AN857 - Brushless DC Motor Control Made Easy, nota de aplicación, michochip. Inc.
4. AN885 “BLDC Motor Fundamentals”, nota de aplicación, michochip. Inc.
5. AN894 - Motor Control Sensor Feedback Circuits, nota de aplicación, michochip. Inc.
6. AN899 - Brushless DC Motor Control Using PIC18F.., nota de aplicación, michochip. Inc.
7. AN901 - Using the dsPIC30F for Sensorless BLDC Control, nota de aplicación, michochip.
Inc.
8. AN908 - Using the dspic30F for Vector Control of an AC Induction machine, nota de
aplicación, michochip. Inc.
9. AN937 implementacion de PID digital en pic18, nota de aplicación, michochip. Inc.
10. AN957 “Sensored BLDC Motor Control Using dsPIC 30f2010”, nota de aplicación,
michochip. Inc.
11. AN992 ejemplo controlador en pic30 sin sensores de efecto hall, nota de aplicación,
michochip. Inc.
12. Bates, Martin P. Programming 8-bit PIC Microcontrollers in C: with Interactive Hardware
Simulation. Ed. Elsevier.
13. BUSO, Simone, MATTAVELLI, Paolo, Digital Control in Power Electronics, Ed: Morgan &
Claypool, ISBN-13: 9781598291131 ebook, 2006.
14. Chiasson, Juan N. Control el modelar y del alto rendimiento de máquinas eléctricas, Ed.
Wiley-IEEE, Nueva York, 2005, ISBN 0-471-68449-X.
15. CHILET, Salvador, GIMENO, Francisco, y otros, “Control vectorial de inversores trifasicos”
Ed. Universidad Politécnica de Valencia.
16. Cotrino B, Carlos E. Automatización industrial: definición y objetivos. Pontificia universidad
Javeriana. Material de consulta, electiva co terminal en Automatización Industrial.
17. Di Jasio, Lucio. Programming 32-bit Microcontrollers in C: Exploring the PIC32 (Embedded
Technology). Ed. Elsevier, ISBN 978-0-7506-8709-6
77
18. Donald G. Fink y H. Wayne Beaty, Manual estándar para los ingenieros eléctricos,
undécimo edición, McGraw-Colina, Nueva York, 1978, ISBN 0-07-020974-X.
19. dsPIC30F Family Reference Manual, de michochip. Inc.
20. Fitzgerald, Kingsley, Kusko Maquinaria eléctrica, 6ta edición en 2002
21. MOHAN, Ned, “Electric Drives, An integrative approach”, Ed: MNPERE.
Minneapolis. 2001.
22. MOHAN, Ned. “Advanced Electric Drives, Analysis control and modelling using
simulink”. Ed: MNPERE. Minneapolis 2001.
23. MOHAN, Ned. “First Course on Power Electronics and Drives”. Ed: MNPERE. Minneapolis
2001.
24. OGATA, Katsuhiko, “Discrete Time Control Systems” second edition Ed: Prentice Hall International, Inc, ISBN 0-13-328642-8, 1995.
25. Pittman Express N2311A011 Brushless DC motor Datasheet. 2001.
26. Rik De Doncker, Duco W.J. Pulle, André Veltman. Advanced Electrical Drives: Analysis,
Modeling, Control (Power Systems). Ed. Springer. ISBN 978-94-007-0179-3
27. Torné Ficapal, Albert. Algoritmos de modulación para motores brushless. Ingenia-CAT –
Motion control department C/Llacuna 162, Barcelona – España
28. Zambrano, Gabriel. Robots Industriales: Manipuladores. Pontificia universidad Javeriana.
Material de consulta, electiva co terminal en Automatización Industrial.
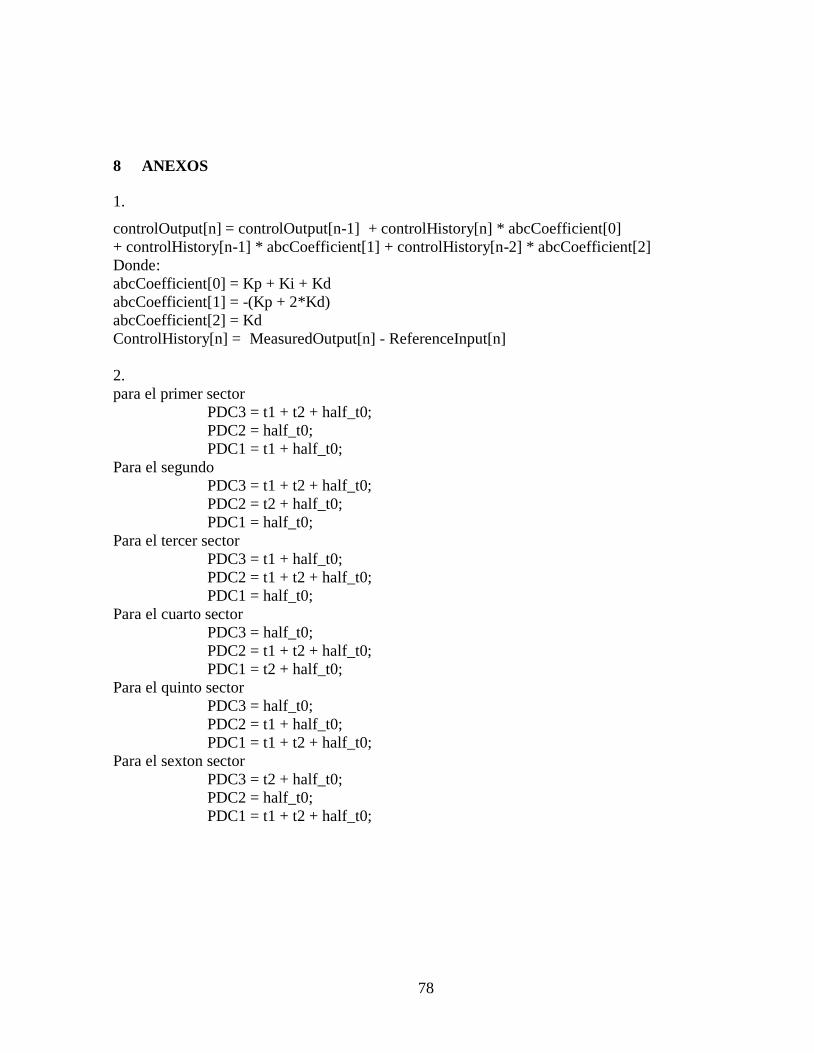
78
8 ANEXOS
1.
controlOutput[n] = controlOutput[n-1] + controlHistory[n] * abcCoefficient[0] + controlHistory[n-1] * abcCoefficient[1] + controlHistory[n-2] * abcCoefficient[2] Donde:
abcCoefficient[0] = Kp + Ki + Kd abcCoefficient[1] = -(Kp + 2*Kd) abcCoefficient[2] = Kd ControlHistory[n] = MeasuredOutput[n] - ReferenceInput[n]
2.
para el primer sector
PDC3 = t1 + t2 + half_t0;
PDC2 = half_t0;
PDC1 = t1 + half_t0;
Para el segundo
PDC3 = t1 + t2 + half_t0;
PDC2 = t2 + half_t0;
PDC1 = half_t0;
Para el tercer sector
PDC3 = t1 + half_t0;
PDC2 = t1 + t2 + half_t0;
PDC1 = half_t0;
Para el cuarto sector
PDC3 = half_t0;
PDC2 = t1 + t2 + half_t0;
PDC1 = t2 + half_t0;
Para el quinto sector
PDC3 = half_t0;
PDC2 = t1 + half_t0;
PDC1 = t1 + t2 + half_t0;
Para el sexton sector
PDC3 = t2 + half_t0;
PDC2 = half_t0;
PDC1 = t1 + t2 + half_t0;
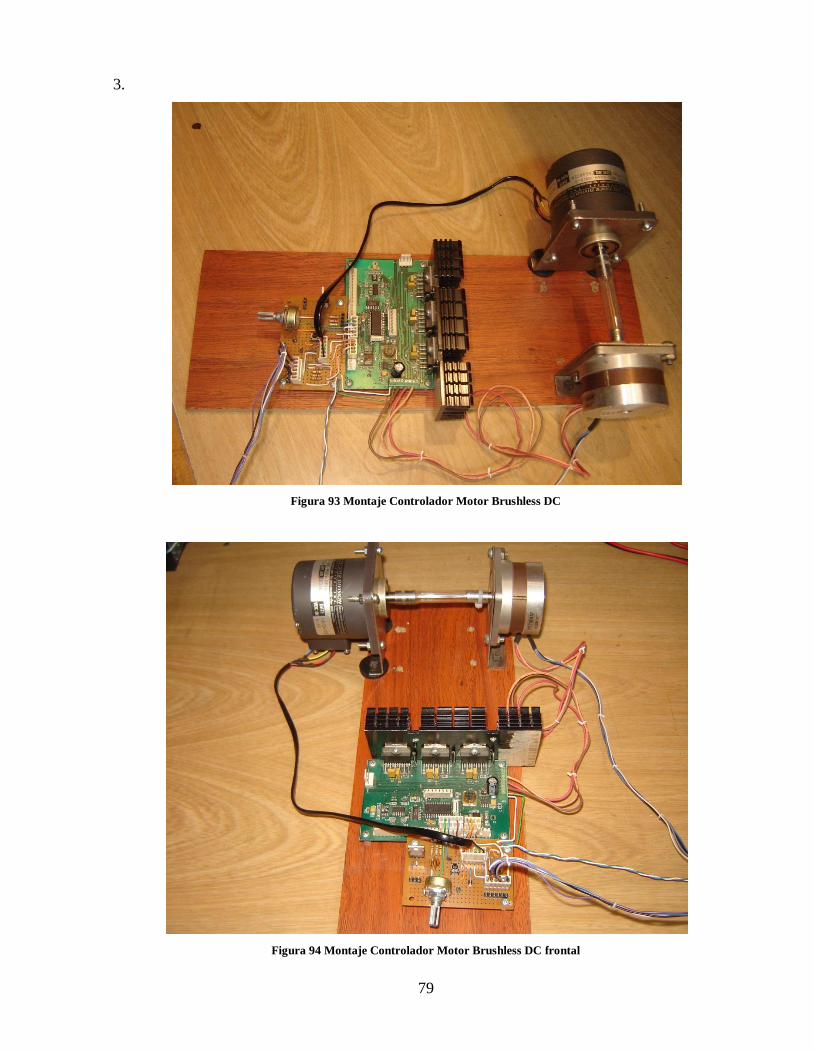
79
3.
Figura 93 Montaje Controlador Motor Brushless DC
Figura 94 Montaje Controlador Motor Brushless DC frontal
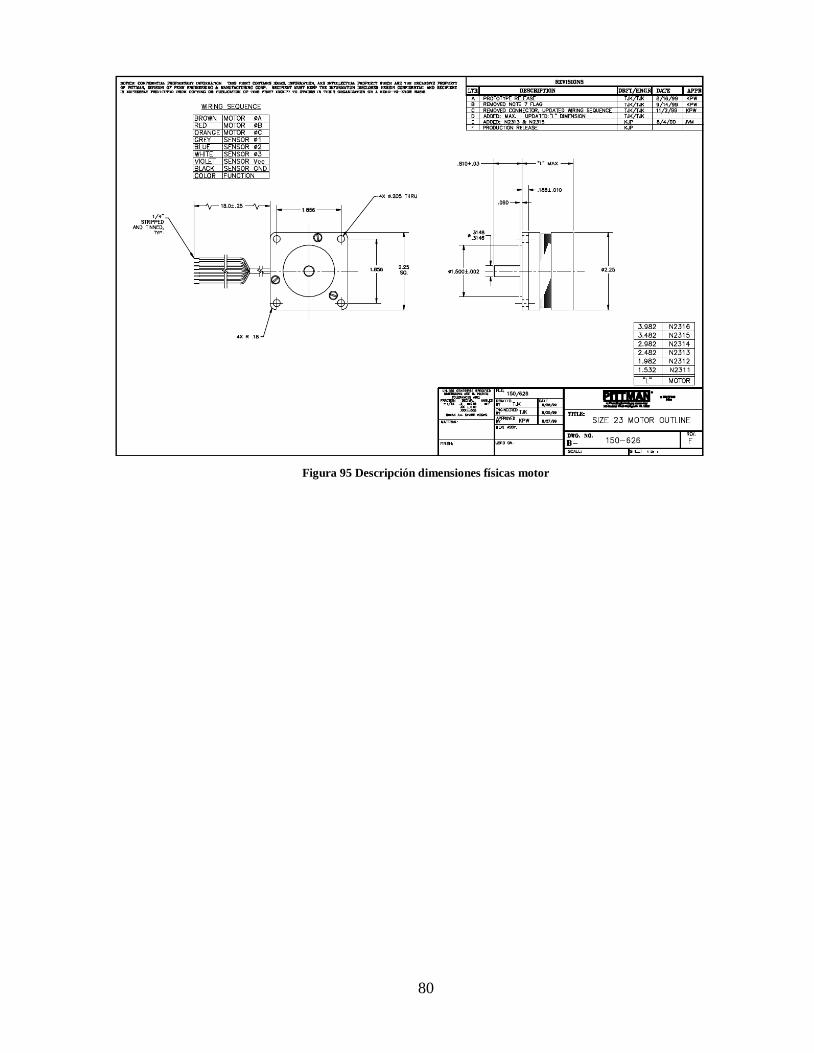
80
Figura 95 Descripción dimensiones físicas motor
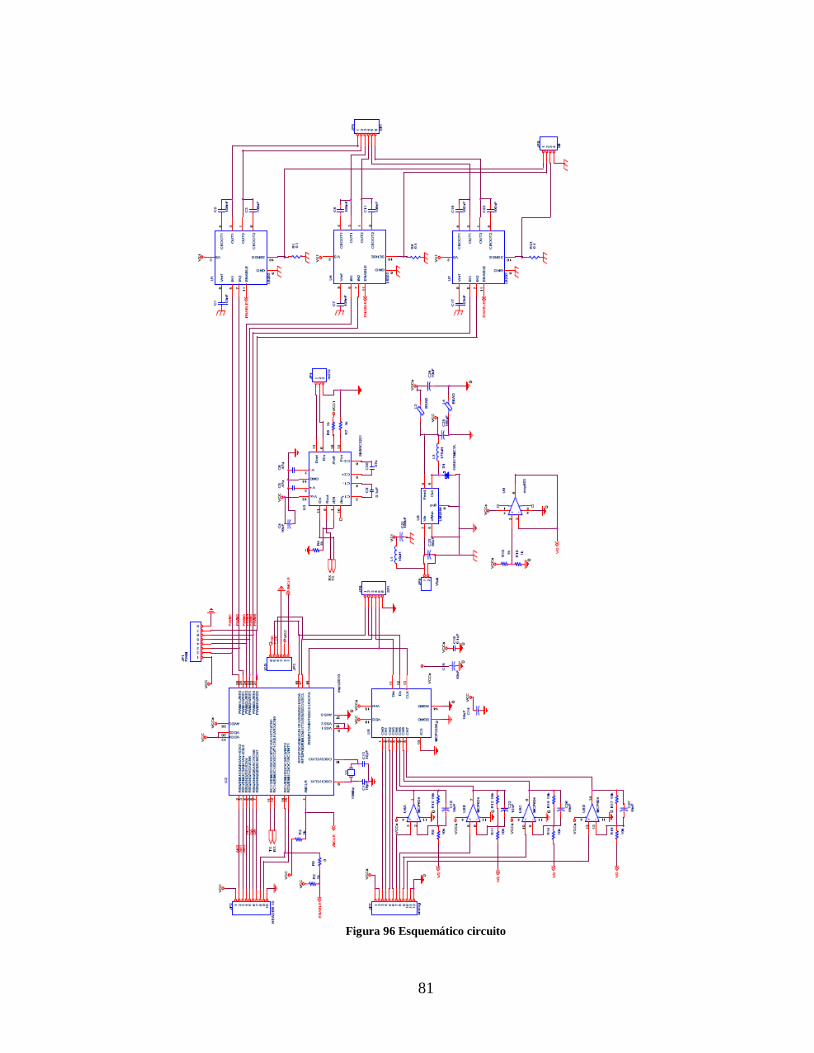
81
Figura 96 Esquemático circuito


















