Contlol Moderno
15
Ingeniería de control moderna 5ª edición Katsuhiko Ogata
-
Upload
jorge-camacho -
Category
Documents
-
view
34 -
download
0
Transcript of Contlol Moderno
5ª ed.
Ingeniería de control moderna
Ingeniería de control moderna presenta un tratamiento riguroso y completo del análisis y diseño de sistemas de control. Los lectores encontrarán, en esta nueva edición del ya clásico libro de Ogata, un texto claro y comprensible escrito para estudian-tes de ingeniería mecánica, eléctrica, aeroespacial o química, con numerosos ejemplos de todos estos campos.En esta quinta edición se ha ampliado la utilización de MAT-LAB para obtener la respuesta de sistemas de control a dife-rentes entradas. Se demuestra la utilidad del enfoque de opti-mización computacional con MATLAB.Otra novedad es la inclusión de nuevos problemas como ejemplos, que facilitan el aprendizaje y el seguimiento de los conceptos introducidos. Con el fin de proporcionar espacio a temas más importantes, se han suprimido ciertos materiales de ediciones previas que tienen una importancia secundaria. En su lugar, se presentan las tablas de transformada de Laplace y el desarrollo en fracciones simples con MATLAB en los Apén-dices A y B respectivamente. En el Apéndice C se da un corto resumen sobre el análisis vectorial-matricial.
www.pearsoneducacion.com
es un sello editorial dePrentice Hall
5ª edición
Katsuhiko Ogata
Inge
nier
ía d
e co
ntro
l m
oder
na
Ogata
Otros libros de interésFundamentos de control con MATLAB Enrique Pinto Bermúdez, Fernando Matía EspadaPEArSOn PrEnTiCE HALLiSBn 978-84-832-2651-3
Sistemas de control moderno, 10.ª edición richard C. Dorf, robert H. BishopPEArSOn PrEnTiCE HALLiSBn 978-84-205-4401-4
ingenieria de control moderna.indd 1 14/4/10 10:08:03
Ingeniería de control moderna

a
Ingeniería de control modernaQuinta edición
Katsuhiko OgataTraducción
Sebastián Dormido CantoProfesor Titular de Ingeniería de Sistemas y Automática, UNED
Raquel Dormido CantoProfesora Titular de Ingeniería de Sistemas y Automática, UNED
Revisión técnicaSebastián Dormido Bencomo
Catedrático de Ingeniería de Sistemas y Automática, UNED
Revisión técnica para LatinoaméricaAmadeo Mariani
Profesor Titular de Sistemas de Control ModernoUTN Regional Buenos Aires Regional/HAEDO
Juan Eduardo PiccoProfesor Titular de la materia Sistemas de Control, Departamento de Ingeniería ElectrónicaUniversridad Tecnológica Regional Córdoba, Provincia de Córdoba, República Argentina
Profesor Titular de la materia de Teoría de Control, Departamento de Ingeniería ElectrónicaInstituto Universitario Aeronáutico, Provincia de Córdoba, República Argentina
Ricardo Julián MantzProfesor Titular Dedicación Exclusiva, Cátedra Control Moderno, Ing. Electrónica
Universidad Nacional de la Plata, Facultad de IngenieríaLa Plata, Provincia de Buenos Aires, Argentina
Jorge Raúl RosselloProfesor Titular de la Cátedra Sistemas de Control 1
Departamento de Ingeniería, Universidad Nacional de la MatanzaSan Justo, Provincia de Buenos Aires, Argentina
Datos de catalogación bibliográfica
INGENIERÍA DE CONTROL MODERNA
Katsuhiko Ogata
PEARSON EDUCACIÓN, S.A., Madrid, 2010
Materia: Ingeniería del control automático, 681.5
Formato: 195 # 250 mm. Páginas: 904
Todos los derechos reservados.Cualquier forma de reproducción, distribución, comunicación pública o transformaciónde esta obra sólo puede ser realizada con la autorización de sus titulares, salvoexcepción prevista por la ley. La infracción de los derechos mencionados puedeser constitutiva de delito contra la propiedad intelectual (arts. 270 y sgts. Código penal).
Diríjase a CEDRO (Centro Español de Derechos Reprográficos: www.cedro.org), si necesitafotocopiar o escanear algún fragmento de esta obra.
5 PEARSON EDUCACIÓN, S.A., 2010Ribera del Loira, 2828042 Madrid (España)www.pearsoneducacion.com
Depósito legal: M
Authorized translation from the English language edition, entitlet INTRODUCTION TO MATERIALS SCIENCEFOR ENGINEERS, 7th Edition by JAMES SHACKELFORD, published by Pearson Education, Inc, publishing asPrentice Hall, Copyright 5 2009. All rights reserved. No part of this book may be reproduced or transmitted in anyform or by any means, electronic or mechanical, including photocopying, recording or by any information storageretrieval system, without permission from Pearson Education, Inc. SPANISH language edition published byPEARSON EDUCATION S.A., Copyright 5 2010.
Equipo editorial:Editor: Miguel Martín-RomoTécnico editorial: Esther Martín
Equipo de producción:Director: José Antonio ClaresTécnico: Isabel Muñoz
Diseño de cubierta: Equipo de diseño de Pearson Educación S.A.
Composición: CopibookImpresión:
IMPRESO EN ESPAÑA - PRINTED IN SPAINEste libro ha sido impreso con papel y tintas ecológicos
Nota sobre enlaces a páginas web ajenas: Este libro puede incluir enlaces a sitios web gestionadospor terceros y ajenos a PEARSON EDUCACIÓN S.A. que se incluyen sólo con finalidad informativa. PEARSONEDUCACIÓN S.A. no asume ningún tipo de responsabilidad por los daños y perjuicios derivados del uso de los datospersonales que pueda hacer un tercero encargado del mantenimiento de las páginas web ajenas a PEARSONEDUCACIÓN S.A. y del funcionamiento, accesibilidad o mantenimiento de los sitios web no gestionados por PEARSONEDUCACIÓN S.A. Las referencias se proporcionan en el estado en que se encuentran en el momento de publicaciónsin garantías, expresas o implícitas, sobre la información que se proporcione en ellas.
ISBN: 978-84-8322-955-2
ISBN: 978-84-8322-660-5ISBN eBook: 978-84-8322-955-2
Contenido
PRÓLOGO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
CAPÍTULO 1. Introducción a los sistemas de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-2. Ejemplos de sistemas de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41-3. Control en lazo cerrado en comparación con control en lazo abierto . . . . 71-4. Diseño y compensación de sistemas de control . . . . . . . . . . . . . . . . . . . . . . . . . 91-5. Contenido del libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
CAPÍTULO 2. Modelado matemático de sistemas de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132-2. Función de transferencia y de respuesta impulso . . . . . . . . . . . . . . . . . . . . . . . 152-3. Sistemas de control automáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172-4. Modelado en el espacio de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292-5. Representación en el espacio de estados de sistemas de ecuaciones dife-
renciales escalares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352-6. Transformación de modelos matemáticos con MATLAB . . . . . . . . . . . . . . . 392-7. Linealización de modelos matemáticos no lineales . . . . . . . . . . . . . . . . . . . . . 42
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
CAPÍTULO 3. Modelado matemático de sistemas mecánicos y sistemas eléctricos . . . . . . . . 633-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633-2. Modelado matemático de sistemas mecánicos . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3-3. Modelado matemático de sistemas eléctricos . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
CAPÍTULO 4. Modelado matemático de sistemas de fluidos y sistemas térmicos . . . . . . . . . . 1004-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1004-2. Sistemas de nivel de líquido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1014-3. Sistemas neumáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1064-4. Sistemas hidráulicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1234-5. Sistemas térmicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
CAPÍTULO 5. Análisis de la respuesta transitoria y estacionaria . . . . . . . . . . . . . . . . . . . . . . . . . . 1595-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1595-2. Sistemas de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1615-3. Sistemas de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1645-4. Sistemas de orden superior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1795-5. Análisis de la respuesta transitoria con MATLAB . . . . . . . . . . . . . . . . . . . . . . 1835-6. Criterio de estabilidad de Routh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2125-7. Efectos de las acciones de control integral y derivativa en el comporta-
miento del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2185-8. Errores en estado estacionario en los sistemas de control con realimenta-
ción unitaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
CAPÍTULO 6. Análisis y diseño de sistemas de control por el método del lugar de las raíces 2696-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2696-2. Gráficas del lugar de las raíces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2706-3. Gráficas del lugar de las raíces con MATLAB . . . . . . . . . . . . . . . . . . . . . . . . . 2906-4. Lugar de las raíces de sistemas con realimentación positiva . . . . . . . . . . . . 3036-5. Diseño de sistemas de control mediante el método del lugar de las raí-
ces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3086-6. Compensación de adelanto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3116-7. Compensación de retardo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3216-8. Compensación de retardo-adelanto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3306-9. Compensación paralela . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
CAPÍTULO 7. Análisis y diseño de sistemas de control por el método de la respuesta enfrecuencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3987-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3987-2. Diagramas de Bode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4037-3. Diagramas polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4277-4. Diagramas de magnitud logarítmica respecto de la fase . . . . . . . . . . . . . . . . 443
vi Contenido
7-5. Criterio de estabilidad de Nyquist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4457-6. Análisis de estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4547-7. Análisis de estabilidad relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4627-8. Respuesta en frecuencia en lazo cerrado de sistemas con realimentación
unitaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4777-9. Determinación experimental de funciones de transferencia . . . . . . . . . . . . . 486
7-10. Diseño de sistemas de control por el método de la respuesta en frecuencia 4917-11. Compensación de adelanto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4937-12. Compensación de retardo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5027-13. Compensación de retardo-adelanto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561
CAPÍTULO 8. Controladores PID y controladores PID modificados . . . . . . . . . . . . . . . . . . . . . . 5678-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5678-2. Reglas de Ziegler-Nichols para la sintonía de controladores PID . . . . . . . . 5688-3. Diseño de controladores PID mediante el método de respuesta en fre-
cuencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5778-4. Diseño de controladores PID mediante el método de optimización
computacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5828-5. Modificaciones de los esquemas de control PID . . . . . . . . . . . . . . . . . . . . 5908-6. Control con dos grados de libertad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5928-7. Método de asignación de ceros para mejorar las características de res-
puesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 641
CAPÍTULO 9. Análisis de sistemas de control en el espacio de estados . . . . . . . . . . . . . . . . 6489-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6489-2. Representaciones en el espacio de estados de sistemas definidos por su
función de transferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6499-3. Transformación de modelos de sistemas con MATLAB . . . . . . . . . . . . . 6569-4. Solución de la ecuación de estado invariante con el tiempo . . . . . . . . . . 6609-5. Algunos resultados útiles en el análisis vectorial-matricial . . . . . . . . . . 6689-6. Controlabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6759-7. Observabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 688
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 720
CAPÍTULO 10. Diseño de sistemas de control en el espacio de estados . . . . . . . . . . . . . . . . . . 72210-1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72210-2. Asignación de polos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72310-3. Solución de problemas de asignación de polos con MATLAB . . . . . . 73510-4. Diseño de servosistemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73910-5. Observadores de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75110-6. Diseño de sistemas reguladores con observadores . . . . . . . . . . . . . . . . . . 77810-7. Diseño de sistemas de control con observadores . . . . . . . . . . . . . . . . . . . 786
Contenido vii
10-8. Sistema regulador óptimo cuadrático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79310-9. Sistemas de control robusto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806
Ejemplos de problemas y soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 818
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 855
APÉNDICE A. Tablas de la transformada de Laplace . . . . . . . . . . . . . . . . . 859
APÉNDICE B. Método de desarrollo en fracciones simples . . . . . . . . . . . . 867
APÉNDICE C. Álgebra vectorial-matricial . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874
BIBLIOGRAFÍA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 882
ÍNDICE ANALÍTICO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 886
viii Contenido
Prólogo
Este libro introduce conceptos importantes en el análisis y diseño de sistemas de control. Loslectores encontrarán un libro de texto claro y comprensible para seguir un curso en la universidadsobre sistemas de control. Está escrito para estudiantes de ingeniería mecánica, eléctrica, aeroes-pacial o química. Se supone que el lector ha completado los siguientes prerrequisitos: cursos decarácter introductorio sobre ecuaciones diferenciales, transformada de Laplace, análisis vecto-rial-matricial, análisis de circuitos, mecánica y termodinámica.
Las revisiones principales hechas en esta edición son como sigue:
Se ha ampliado la utilización de MATLAB para obtener la respuesta de sistemas de controla diferentes entradas.Se demuestra la utilidad del enfoque de optimización computacional con MATLAB.A lo largo de todo el libro se han añadido nuevos problemas como ejemplos.Con el fin de proporcionar espacio a temas más importantes se han suprimido ciertos mate-riales de ediciones previas que tienen una importancia secundaria. Los grafos de flujo deseñal se han eliminado del libro. También se suprimió un capítulo sobre la transformada deLaplace. En su lugar se presentan las tablas de transformada de Laplace y el desarrollo enfracciones simples con MATLAB en los Apéndices A y B respectivamente.En el Apéndice C se da un corto resumen sobre el análisis vectorial-matricial.
Esta edición de Ingeniería de Control Moderna está organizada en diez capítulos. El conteni-do del libro es el siguiente: El Capítulo 1 presenta una introducción a los sistemas de control. ElCapítulo 2 trata el modelado matemático de sistemas de control. Se presenta también en estecapítulo una técnica de linealización de modelos matemáticos no lineales. El Capítulo 3 analizael modelado matemático de los sistemas mecánicos y eléctricos. El Capítulo 4 trata el modeladode los sistemas fluídicos (tales como sistemas de nivel de líquido, sistemas neumáticos y siste-mas hidráulicos) y sistemas térmicos.
El Capítulo 5 trata el análisis de la respuesta transitoria y el estado estacionario de los siste-mas de control. MATLAB se utiliza extensivamente para el análisis de la respuesta transitoria. Elcapítulo presenta el criterio de estabilidad de Routh para el análisis de estabilidad de los sistemasde control. También se estudia el criterio de estabilidad de Hurwitz.
El Capítulo 6 aborda el análisis y diseño de sistemas de control mediante el lugar de las raí-ces, incluyendo los sistemas con realimentación positiva y los sistemas condicionalmente esta-bles. Se estudia con detalle la representación del lugar de las raíces con MATLAB. Se estudia elmétodo del lugar de las raíces para el diseño de compensadores de adelanto, retardo y retardo-adelanto.
El Capítulo 7 presenta el análisis y diseño de sistemas de control mediante la respuesta enfrecuencia. Se trata el criterio de estabilidad de Nyquist de una forma fácilmente comprensible.Se analiza el método de los diagramas de Bode para el diseño de compensadores de adelanto,retardo y retardo-adelanto.
El Capítulo 8 estudia los controladores PID básicos y modificados. Se presentan con ciertodetalle los métodos computacionales (en MATLAB) para obtener valores óptimos de los pará-metros de los controladores que satisfacen ciertos requisitos de las características de la respuestaescalón.
El Capítulo 9 presenta un análisis básico de los sistemas de control en el espacio de estados.Se introducen los conceptos de controlabilidad y observabilidad.
El Capítulo 10 analiza el diseño de sistemas de control en el espacio de estados. El estudioincluye la asignación de polos, observadores de estado y control óptimo cuadrático. Al final delcapítulo se presenta un análisis introductorio de los sistemas de control robusto.
El libro se ha estructurado con la finalidad de facilitar la comprensión gradual de la teoría delcontrol al estudiante. Se ha tratado de evitar cuidadosamente razonamientos con un fuerte conte-nido matemático en la presentación del material. Se proporcionan demostraciones matemáticascuando contribuyen a la comprensión de los temas presentados.
Se ha realizado un esfuerzo especial para proporcionar ejemplos en puntos estratégicos deforma que el lector obtenga una mejor comprensión de la materia que se analiza. Además, seofrecen al final de cada capítulo, excepto en el Capítulo 1, una serie de problemas resueltos (pro-blemas de tipo A). Se anima al lector a que estudie con cuidado todos estos problemas para obte-ner una comprensión más profunda de los temas analizados. Además, se proponen muchos pro-blemas (sin solución) al final de cada capítulo, excepto en el Capítulo 1. Los problemas noresueltos (problemas de tipo B) se pueden utilizar para que el alumno los resuelva en casa ocomo parte de un examen.
Si este libro se usa como texto para un curso semestral (56 horas de clase) se puede cubrir lamayor parte del material omitiendo ciertas partes. Debido a la abundancia de problemas ejem-plos y problemas resueltos (problemas A) que pueden responder a muchas de las posibles pre-guntas que el lector pueda plantearse, este libro puede también servir como un texto de autoestudio para aquellos ingenieros que ya trabajan y que desean estudiar teoría de control básica.
Quisiera expresar mi agradecimiento a los siguientes revisores de esta edición del libro: MarkCampbell, Cornell University; Henry Sodano, Arizona State University; y Atul G. Kelkar, IowaState University. Finalmente deseo expresar mi más sincero reconocimiento a Ms. Alice Dwor-kin, Associate Editor, Mr. Scout Disanno, Señor Managing Editor, y a todas las personas que hanestado involucradas en este proyecto, por la rapidez y el excelente trabajo de producción de estelibro.
Katsuhiko Ogata
x Prólogo
Introducción a los sistemasde control
1-1 IntroducciónLas teorías de control que se utilizan habitualmente son la teoría de control clásica (tambiéndenominada teoría de control convencional), la teoría de control moderno y la teoría de controlrobusto. Este libro presenta el tratamiento del análisis y diseño de sistemas de control basado enla teoría de control clásica y teoría de control moderno. En el Capítulo 10 se incluye una breveintroducción a la teoría de control robusto.
El control automático ha desempeñado un papel vital en el avance de la ingeniería y la cien-cia. El control automático se ha convertido en una parte importante e integral en los sistemas devehículos espaciales, en los sistemas robóticos, en los procesos modernos de fabricación y encualquier operación industrial que requiera el control de temperatura, presión, humedad, flujo,etc. Es deseable que la mayoría de los ingenieros y científicos estén familiarizados con la teoría yla práctica del control automático.
Este libro pretende ser un texto en sistemas de control para un nivel avanzado en el bachille-rato o en la universidad. Todos los materiales necesarios se incluyen en el libro. La matemáticarelacionada con las transformadas de Laplace y el análisis vectorial y matricial se presentan enapéndices separados.
Breve revisión de los desarrollos históricos de la teoría y práctica del con-trol. El primer trabajo significativo en control automático fue el regulador de velocidad centrí-fugo de James Watt para el control de la velocidad de una máquina de vapor, en el siglo diecio-cho. Minorsky, Hazen y Nyquist, entre muchos otros, aportaron trabajos importantes en las
etapas iniciales del desarrollo de la teoría de control. En 1922, Minorsky trabajó en controladoresautomáticos para el guiado de embarcaciones, y mostró que la estabilidad puede determinarse apartir de las ecuaciones diferenciales que describen el sistema. En 1932, Nyquist diseñó un pro-cedimiento relativamente simple para determinar la estabilidad de sistemas en lazo cerrado, apartir de la respuesta en lazo abierto a entradas sinusoidales en estado estacionario. En 1934,Hazen, quien introdujo el término servomecanismos para los sistemas de control de posición,analizó el diseño de los servomecanismos con relé, capaces de seguir con precisión una entradacambiante.
Durante la década de los cuarenta, los métodos de la respuesta en frecuencia (especialmentelos diagramas de Bode) hicieron posible que los ingenieros diseñaran sistemas de control linealesen lazo cerrado que cumplieran los requisitos de comportamiento. En los años cuarenta y cin-cuenta muchos sistemas de control industrial utilizaban controladores PID para el control de lapresión, de la temperatura, etc. A comienzos de la década de los cuarenta Ziegler y Nichols esta-blecieron reglas para sintonizar controladores PID, las denominadas reglas de sintonía de Zie-gler-Nichols. A finales de los años cuarenta y principios de los cincuenta, se desarrolló por com-pleto el método del lugar de las raíces propuesto por Evans.
Los métodos de respuesta en frecuencia y del lugar de las raíces, que forman el núcleo de lateoría de control clásica, conducen a sistemas estables que satisfacen un conjunto más o menosarbitrario de requisitos de comportamiento. En general, estos sistemas son aceptables pero noóptimos desde ningún punto de vista. Desde el final de la década de los cincuenta, el énfasis enlos problemas de diseño de control se ha desplazado del diseño de uno de los posibles sistemasque funciona adecuadamente al diseño de un sistema óptimo respecto de algún criterio.
Conforme las plantas modernas con muchas entradas y salidas se vuelven más y más comple-jas, la descripción de un sistema de control moderno requiere una gran cantidad de ecuaciones.La teoría de control clásica, que trata de los sistemas con una entrada y una salida, pierde supotencialidad cuando se trabaja con sistemas con entradas y salidas múltiples. Hacia 1960, debi-do a la disponibilidad de las computadoras digitales fue posible el análisis en el dominio deltiempo de sistemas complejos. La teoría de control moderna, basada en el análisis en el dominiodel tiempo y la síntesis a partir de variables de estados, se ha desarrollado para manejar la cre-ciente complejidad de las plantas modernas y los requisitos cada vez más exigentes sobre preci-sión, peso y coste en aplicaciones militares, espaciales e industriales.
Durante los años comprendidos entre 1960 y 1980, se investigó a fondo el control óptimotanto de sistemas determinísticos como estocásticos, así como el control adaptativo y con apren-dizaje de sistemas complejos. Desde la década de los ochenta hasta la de los noventa, los avancesen la teoría de control moderna se centraron en el control robusto y temas relacionados.
La teoría de control moderna se basa en el análisis en el dominio temporal de los sistemas deecuaciones diferenciales. La teoría de control moderna simplificó el diseño de los sistemas decontrol porque se basa en un modelo del sistema real que se quiere controlar. Sin embargo, laestabilidad del sistema depende del error entre el sistema real y su modelo. Esto significa quecuando el controlador diseñado basado en un modelo se aplica al sistema real, éste puede no serestable. Para evitar esta situación, se diseña el sistema de control definiendo en primer lugar elrango de posibles errores y después diseñando el controlador de forma que, si el error del sistemaestá en dicho rango, el sistema de control diseñado permanezca estable. El método de diseñobasado en este principio se denomina teoría de control robusto. Esta teoría incorpora tanto laaproximación de respuesta en frecuencia como la del dominio temporal. Esta teoría es matemáti-camente muy compleja.
2 Ingeniería de control moderna
Como esta teoría requiere una base matemática de nivel de licenciados, la inclusión de lateoría de control robusto en este libro está limitada únicamente a aspectos introductorios. El lec-tor interesado en detalles sobre la teoría de control robusto debería cursar previamente un cursode control de una licenciatura en una universidad.
Definiciones. Antes de analizar los sistemas de control, deben definirse ciertos términosbásicos.
Variable controlada y señal de control o variable manipulada. La variable controlada esla cantidad o condición que se mide y controla. La señal de control o variable manipulada es lacantidad o condición que el controlador modifica para afectar el valor de la variable controlada.Normalmente, la variable controlada es la salida del sistema. Controlar significa medir el valorde la variable controlada del sistema y aplicar la variable manipulada al sistema para corregir olimitar la desviación del valor medido respecto del valor deseado.
En el estudio de la ingeniería de control, es necesario definir términos adicionales que seprecisan para describir los sistemas de control.
Plantas. Una planta puede ser una parte de un equipo, tal vez un conjunto de los elementosde una máquina que funcionan juntos, y cuyo objetivo es efectuar una operación particular. Eneste libro se llamará planta a cualquier objeto físico que se va a controlar (como un dispositivomecánico, un horno de calefacción, un reactor químico o una nave espacial).
Procesos. El Diccionario Merriam-Webster define un proceso como una operación o undesarrollo natural progresivamente continuo, marcado por una serie de cambios graduales quese suceden unos a otros de una forma relativamente fija y que conducen a un resultado o pro-pósito determinados; o una operación artificial o voluntaria que se hace de forma progresiva yque consta de una serie de acciones o movimientos controlados, sistemáticamente dirigidoshacia un resultado o propósito determinado. En este libro se llamará proceso a cualquier opera-ción que se va a controlar. Algunos ejemplos son los procesos químicos, económicos y biológi-cos.
Sistemas. Un sistema es una combinación de componentes que actúan juntos y realizan unobjetivo determinado. Un sistema no está necesariamente limitado a los sistemas físicos. El con-cepto de sistema se puede aplicar a fenómenos abstractos y dinámicos, como los que se encuen-tran en la economía. Por tanto, la palabra sistema debe interpretarse en un sentido amplio quecomprenda sistemas físicos, biológicos, económicos y similares.
Perturbaciones. Una perturbación es una señal que tiende a afectar negativamente el valorde la salida de un sistema. Si la perturbación se genera dentro del sistema se denomina interna,mientras que una perturbación externa se genera fuera del sistema y es una entrada.
Control realimentado. El control realimentado se refiere a una operación que, en presenciade perturbaciones, tiende a reducir la diferencia entre la salida de un sistema y alguna entrada dereferencia, y lo realiza tomando en cuenta esta diferencia. Aquí sólo se especifican con este tér-mino las perturbaciones impredecibles, ya que las perturbaciones predecibles o conocidas siem-pre pueden compensarse dentro del sistema.
Capítulo 1. Introducción a los sistemas de control 3
1-2 Ejemplos de sistemas de controlEn esta sección se presentarán algunos ejemplos de sistemas de control.
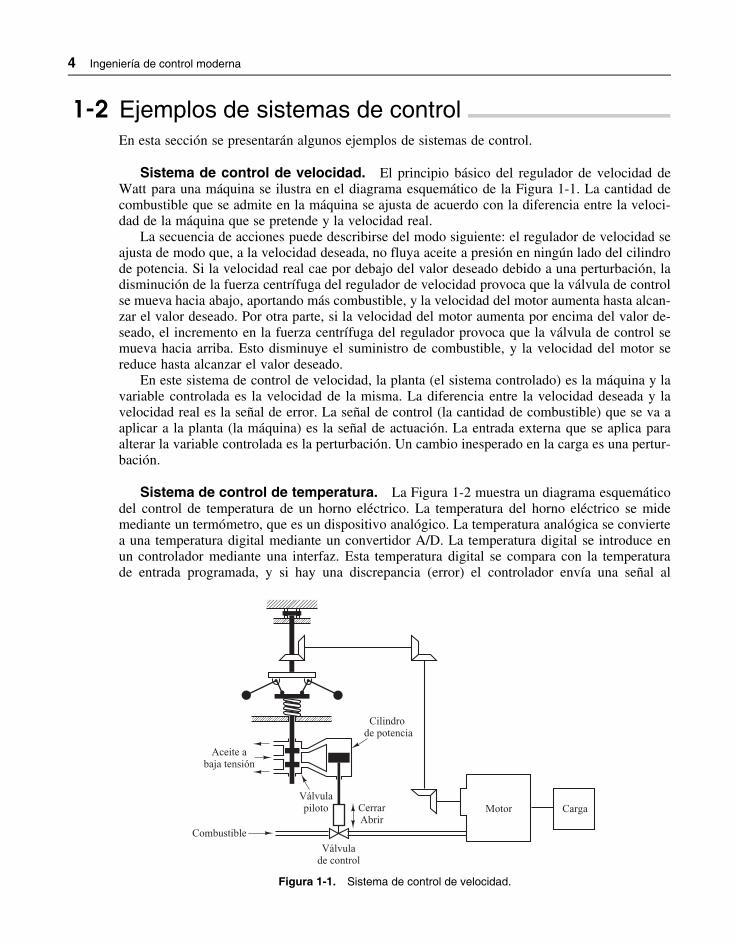
Sistema de control de velocidad. El principio básico del regulador de velocidad deWatt para una máquina se ilustra en el diagrama esquemático de la Figura 1-1. La cantidad decombustible que se admite en la máquina se ajusta de acuerdo con la diferencia entre la veloci-dad de la máquina que se pretende y la velocidad real.
La secuencia de acciones puede describirse del modo siguiente: el regulador de velocidad seajusta de modo que, a la velocidad deseada, no fluya aceite a presión en ningún lado del cilindrode potencia. Si la velocidad real cae por debajo del valor deseado debido a una perturbación, ladisminución de la fuerza centrífuga del regulador de velocidad provoca que la válvula de controlse mueva hacia abajo, aportando más combustible, y la velocidad del motor aumenta hasta alcan-zar el valor deseado. Por otra parte, si la velocidad del motor aumenta por encima del valor de-seado, el incremento en la fuerza centrífuga del regulador provoca que la válvula de control semueva hacia arriba. Esto disminuye el suministro de combustible, y la velocidad del motor sereduce hasta alcanzar el valor deseado.
En este sistema de control de velocidad, la planta (el sistema controlado) es la máquina y lavariable controlada es la velocidad de la misma. La diferencia entre la velocidad deseada y lavelocidad real es la señal de error. La señal de control (la cantidad de combustible) que se va aaplicar a la planta (la máquina) es la señal de actuación. La entrada externa que se aplica paraalterar la variable controlada es la perturbación. Un cambio inesperado en la carga es una pertur-bación.
Sistema de control de temperatura. La Figura 1-2 muestra un diagrama esquemáticodel control de temperatura de un horno eléctrico. La temperatura del horno eléctrico se midemediante un termómetro, que es un dispositivo analógico. La temperatura analógica se conviertea una temperatura digital mediante un convertidor A/D. La temperatura digital se introduce enun controlador mediante una interfaz. Esta temperatura digital se compara con la temperaturade entrada programada, y si hay una discrepancia (error) el controlador envía una señal al
Figura 1-1. Sistema de control de velocidad.
4 Ingeniería de control moderna