
Contenido Del Manual Propio Mantenimiento
35
Manual Remolcador tipo ASDT (AZIMUTH STERN DRIVE TUG) 1. Manual de operación 1.1 Introducción El presente manual tiene como finalidad describir el funcionamiento del remolcador enfocado en el sistema que le permite combinar la maniobrabilidad, potencia y seguridad de la nave, haciendo de el uno de los artefactos navales mas utilizados en las operaciones de apoyo portuario y marítimo. El sistema de propulsión y control del remolcador es diseñado e instalado por NIIGATA empresa japonesa con gran experiencia en el mercado, debemos resaltar que la empresa fabrica y comercializa la totalidad de sus piezas, así como brinda la asesoría técnica correspondiente. 1.2 Función: El remolcador tipo ASDT siglas en ingles que designa el tipo de remolcador por su propulsión tipo acimutal instalada en popa, el cual fue diseñado para prestar apoyo a naves de gran dimensión en las operaciones de atraque y desatraque en terminales y zonas portuarias. Así también puede ser utilizado para remolque de alta mar, contando con una autonomía de 30 días y por las características de “Fire figthing” puede prestar auxilio a otras embarcaciones 1.3 Importancia: La importancia del remolcador subyace en la funcionalidad que posee este, tal característica es posible por la hélice acimutal
-
Upload
sandro-che -
Category
Documents
-
view
345 -
download
1
description
Manual de manejo de un remolcador
Transcript of Contenido Del Manual Propio Mantenimiento

Manual Remolcador tipo ASDT (AZIMUTH STERN DRIVE TUG)
1. Manual de operación
1.1Introducción
El presente manual tiene como finalidad describir el funcionamiento del remolcador
enfocado en el sistema que le permite combinar la maniobrabilidad, potencia y
seguridad de la nave, haciendo de el uno de los artefactos navales mas utilizados en
las operaciones de apoyo portuario y marítimo. El sistema de propulsión y control del
remolcador es diseñado e instalado por NIIGATA empresa japonesa con gran
experiencia en el mercado, debemos resaltar que la empresa fabrica y comercializa la
totalidad de sus piezas, así como brinda la asesoría técnica correspondiente.
1.2 Función:
El remolcador tipo ASDT siglas en ingles que designa el tipo de remolcador por su
propulsión tipo acimutal instalada en popa, el cual fue diseñado para prestar apoyo a
naves de gran dimensión en las operaciones de atraque y desatraque en terminales y
zonas portuarias. Así también puede ser utilizado para remolque de alta mar, contando
con una autonomía de 30 días y por las características de “Fire figthing” puede prestar
auxilio a otras embarcaciones
1.3 Importancia:
La importancia del remolcador subyace en la funcionalidad que posee este, tal
característica es posible por la hélice acimutal que puede girar 360˚ en torno de su eje
vertical generando un empuje controlado omnidireccional en sentido horizontal, lo que
significa una superior maniobrabilidad suprimiendo con este equipo la necesidad del
uso de timón, y de un sistema de inversión de giro de la hélice o reductora, ya que la
propia unidad de la hélice acimutal incorpora un sistema reductor de las RPM a las que
gira el motor principal que suministran la potencia. ZP peller es la denominación la cual
NIIGATA otorga a sus equipos siendo el modelo instalado abordo el ZP 41.

1.4Especificaciones técnicas:
La nave fue construida y equipada con la maquinaria de acuerdo con las últimas reglas
y regulaciones de la clasificadora LOYDS REGISTER para el servicio en todo el
mundo. La nave está registrada con la siguiente notación de clase:
LR *100A1 Escort, Tug, Fire Fighting Ship 1 with water spray + LMC, UMS, IWS
Donde
LR sociedad clasificadora, LOYD REGISTER
*100 A1 designación que evidencia que la nave fue construida desde su concepción
bajo los estándares de la sociedad clasificadora
Escort tug es un remolcador de acompañamiento
Fire Fighting Ship with wáter spray, el remolcador está equipado de un sistema de
combate contra incendios externo y sistema de aproximación
LMC designación en la cual la clase certifica que la maquinaria instalada a bordo esta
bajo los estándares internacionales
UMS maquina desatendida
IWS in wáter service, la nave está preparada para realizar las inspecciones intermedias
de clase sin sacar la nave a dique seco
Por lo consiguiente cumple con la administración marítima nacional (DICAPI), en
adición cumple con las sigtes regulaciones
1. The International Regulations for Tonnage Measurements of 1969.
2. The International Convention on Load Lines 1966 with amendments.
3. The International convention for Safety of Life at Sea (SOLAS 1974) with
latest amendments.
4. The International Convention for Prevention of Pollution from Ships MARPOL
1978.
5. International Telecommunication Regulations of 1973 and Radio
Regulations 1982.
6. International Regulations for Preventing Collision at sea 1972.
7. GMDSS Rules for Área 1.
Este remolcador disponen de una redundancia en su sistema de propulsión, dispone
de dos sistemas propulsores, completamente independientes desde el motor diesel
hasta el propulsor acimutal. En el caso de que uno falle dispondrá como mínimo del 50

por 100 de la potencia propulsora, lo que da al sistema de propulsión un alto grado de
seguridad y fiabilidad.
El remolcador está diseñado para ser tripulado por cuatro personas. Un aspecto muy
importante de la seguridad es el factor humano. La reducción de tripulantes se dio
posible por un incremento de la automatización, que no ponga en peligro la seguridad
del sistema. La disposición de los controles en el puente de gobierno permite gobernar
el remolcador en cualquier situación. La flexibilidad del remolcador hace que repensar
o reorientar una maniobra no sea necesario si se varía el modo de operación de proa a
popa, o del método directo al indirecto. Esto evita situaciones de pánico en momentos
de emergencia, con la posibilidad de errores con fatales consecuencias.
El remolcador pueden girar 360º en su misma eslora y pasar de todo avante a todo
atrás en dos esloras como máximo. Pueden navegar en cualquier dirección, lo que les
permite, por ejemplo, seguir al buque en la dirección más favorable. Los propulsores
azimutales están situados a popa, que es la posición más eficiente. Los movimientos
se consiguen manteniendo el equilibrio entre la fuerza del cabo de remolque y el
empuje del remolcador, eliminando el peligro de hundimiento por la componente
transversal del cabo de remolque, como ocurría con los remolcadores convencionales.
El tiro puede ser ejercido en cualquier dirección, casi instantáneamente, sin ángulos
intermedios de tiro. Como resultado se obtiene un tiro elevado, con un control rápido,
delicado y preciso. Las defensas están dispuestas de tal manera que proporcionan
continuidad a lo largo del casco, sin salientes permitiendo empujar bien con la proa,
con la popa o con los dos costados contra el buque asistido.
La disposición de las defensas alrededor de la nave

El remolcador dispone de equipos propulsores que consta de dos motores diesel con
una potencia 3000 BHP cada uno, y una tracción a punto fijo (Bollard pull) de 80
toneladas.
Este potencia ha sido necesario por las gran dimensión que son las naves que operan
en el terminal (mas de 300 metros de eslora y 95000 Toneladas de desplazamiento),
adicionalmente contrarrestar las fuerzas ejercidas por las corrientes submarinas.
Las formas de este remolcador son de gran rendimiento y garantizan la correcta fluidez
del agua hacia popa para lograr el máximo aprovechamiento de la potencia instalada y
la maniobrabilidad que brinda el tipo de propulsor instalado.
El remolcador tiene como complemento instalado un combinado cabrestante y winche
de remolque (malacate) dinámico, con un tambor deslizable y dos elevadores de
cadena de ancla para el fondeo, este se encuentra fuertemente soldado a la cubierta
de proa, el equipo es operado hidráulicamente el cual es controlado por sistema
electrónico. El Winche cumple con los requisitos de las Reglas de DNV Clasificación de
los remolcadores escolta. (DNV Reglas pinta. 5 Ch 7 Sec. 15).
El remolcador tiene instalado tres (3) grupos electrógenos Caterpillar, cada uno
compuesto de motor diesel serie C9 inyección electrónica, acoplado directamente a un
alternador marca Stamford. Los cuales proveen de energía eléctrica que cumplen con
las exigencias de los balances de carga
y las seguridades .
El generador es de 3-fases marina, síncrono sin escobillas. Los generadores están
dispuestos para el trabajo en paralelo o en stand-by. Las unidades están montado en
una base resilente. Los Generadores Diesel tiene la sgte características

Potencia sobre 150 kW a 1500-1800 RPM MAX
Sistema de arranque eléctrico 24 V DC
Voltaje (V) 400
Frecuencia 50
Refrigeración (motor diesel) mediante cajas de enfriamiento (box cooler).
El remolcador está preparado para realizar la protección contra incendios de buques y
terminales, con bombas impulsadas por el motor principal de más de 2400m³/h de
capacidad cada monitor, denominado sistemas “FI-FI”. Asimismo está dotado de un
sistema de rociado que forma una campana para casos de aproximación.
Principales dimensiones y capacidades
o Eslora (incluidos defensas) 33.03 m
o Eslora (excluido defensas) 32.60 m
o Puntal 28.60 m
o Manga 13.00 m
o Calado medio 6.10 / 5.70 m
o Calado de diseño, 4.60 m
o Calado extremos (diseño) 5.40 m
La velocidad del remolcador con fondo limpio en aguas profundas y calmas será min.
12,5 nudos a un calado medio de diseño de 4.8/5.6m. con el tiempo en calma.
Capacidad de tanques
o D.O. diario / sedimentación (100%) ABT. 20 m³
o Almacenamiento de aceite (100%) aprox. 14 m³
o Aceite sucio (100%) aprox. 8 m³
o Depósito de aguas residuales (sentinas) (100%) aprox. 5 m³
o Agua consumo (100%) . 2 X 19 m³
o D.O. almacenamiento (100%) . 240 m³
o Propulsor azimutal aceite almacén aprox. 3 m³
o Espuma del tanque y dispersante aprox. 15 m³
La cubierta de carga esta reforzada, para soportar una carga de cubierta específica de 5 toneladas / m².
1.4. Componentes:
El sistema de gobierno y propulsión de la nave podemos clasificarlo
Componentes de fuerza, (02) maquinas principales
Componentes de trasmisión, (02) caja de fuerza y (02) eje intermedio
Componentes de propulsión y gobierno, (02) unidad de propulsión acimutal
Componentes de control, (01) sistema de control remoto
1.4.1 Componentes de fuerza
Encargado de suministrar la fuerza motriz al sistema por medio de motores diesel,
transformando la fuerza alternativa a giratoria, los cuales trasmiten la potencia al sistema
mediante una caja de fuerza acoplada al motor y un acople flexible o vulcan, dicho
motores tienen las sigtes características técnicas
Fabricante NIIGATA POWER SYSTEM
Motores diesel de 4 tiempos en línea, 4 válvulas con pistón tipo tronco, con turbo
cargador y enfriador de aire
Modelo 8L28XH
MCR 2206 kw (3000 PS) a la salida de la caja de fuerza
Velocidad max 750 RPM
Velocidad ralentí 450 RPM
Régimen en sobre carga 110 % MCR por 01 hora cada periodo de 12 horas
Numero de cilindros 8
Diámetro del cilindro 280 mm

Carrera pistón 370 mm
Max presión combustión 14.7 Mpa
Sistema de inyección directa
Lubricación forzada, capacidad de carter 800 lts de aceite grado SAE 40, carter
húmedo
Sentido de rotación de los motores horario
Tipo de combustible, diesel marino o gas oíl, correspondiente a los sigtes
estándares ISO 8217, F-DMX y F-MDA, ASTM D975 Grado N1-D y Grado N2-D
BIO Diesel, bajo contenido de azufre
Masa aprox 21.5 Ton
Consumo especifico de combustible 195gr / Kw-hr. Velocidad económica 8.5 nudos
a un consumo de 145 lt/hr por maquina
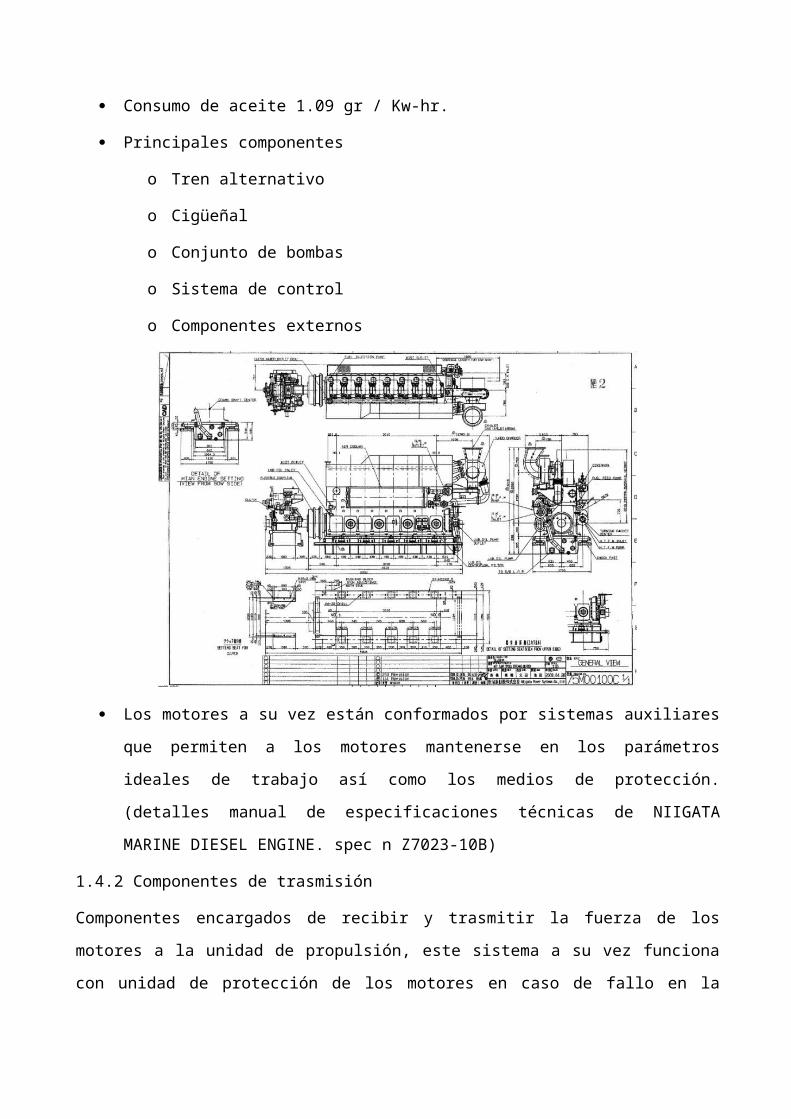
Consumo de aceite 1.09 gr / Kw-hr.
Principales componentes
o Tren alternativo
o Cigüeñal
o Conjunto de bombas
o Sistema de control
o Componentes externos
Los motores a su vez están conformados por sistemas auxiliares que permiten a los
motores mantenerse en los parámetros ideales de trabajo así como los medios de
protección. (detalles manual de especificaciones técnicas de NIIGATA MARINE
DIESEL ENGINE. spec n Z7023-10B)
1.4.2 Componentes de trasmisión
Componentes encargados de recibir y trasmitir la fuerza de los motores a la unidad de
propulsión, este sistema a su vez funciona con unidad de protección de los motores en
caso de fallo en la unidad de propulsión. Podemos dividirla en 2 partes la caja de fuerza y
el eje intermedio.
Caja de fuerza, componente consistente en un set de múltiple discos accionado
hidráulicamente que trasmite la fuerza de los motores a la propulsión mediante el eje
intermedio. La caja tiene doble modulación la primera el sistema de deslizamiento que es
capaz de girar las hélices a muy baja velocidad de 0 a 450 RPM (velocidad ralentí del
motor), esta modalidad es controlada electrónicamente y la segunda de PTO que trasmite
la fuerza entera del motor al sistema. A su vez tiene acoplada la bomba hidráulica del
gobierno
La caja tiene las sgtes características técnicas
Fabricante HITACHI NICO TRASMISSION CO, construido para NIIGATA POWER
SYSTEM
Modelo HLP85Y

Trasmisión de potencia 2206 Kw (3000 PS) / 750 RPM
Control principal de deslizamiento, sistema de control electrónico – hidráulico, con
una válvula proporcional
Encroche / desencroche 450 RPM
Rango de velocidad del eje de salida
o Modalidad de deslizamiento a velocidad ralentí 113 – 450 RPM a velocidad
motor de 450
o Modalidad de deslizamiento a toda marcha 188 – 675 RPM a velocidad
motor 750 RPM
Lubricación forzada, especificación del aceite, hidráulico ISO VG 46, volumen aprox
200 Lts
Masa aprox. 2.8 Ton / unidad.
Principales componentes:
o Grupo del eje de entrada
o Clutch o grupo de encroche / desencroche
o Grupo del eje de salida
o Grupo de la caja
o Componentes externos
La caja cuenta con una serie de accesorios auxiliares que permitirán la normal
operación. (partes especificadas en el manual de instrucción HIDRAULIC CLUTCH
MODEL HLP85Y WITH ELECTRONIC CONTROLLER, n. IM005378G)
Eje intermedio
Línea de ejes conformado por 01 eje cardan delantero, 02 ejes intermedios, 01 eje
cardan posterior este ultimo acoplado al ZP peller
La línea de ejes esta complementada por un conjunto de descansos o chumaceras,
acoples universales y accesorios (detalles manual de especificaciones técnicas de
NIIGATA MARINE DIESEL ENGINE. spec n Z7023-10B)
1.4.3 Componentes de propulsión y gobierno
El componente z-drive que es la configuración que tiene el propulsor acimutal (recibe el
nombre por la forma en Z que tiene distribuido los ejes de entrada y salida), con
accionamiento directo de motores diesel, está equipado con una hélice de paso fijo, que a
su vez está localizado en el interior de una tobera. El conjunto de libre desplazamiento
circular está fijado en el casco, el mecanismo de gobierno es conducido a través de 02
motores hidráulicos que desplazan la unidad en ambos sentidos. Podemos dividir en
Caja de engranajes superior y unidad media
Eje de entrada horizontal y eje vertical
Unidad de gobierno
Eje vertical de unión
Caja de engranajes inferior
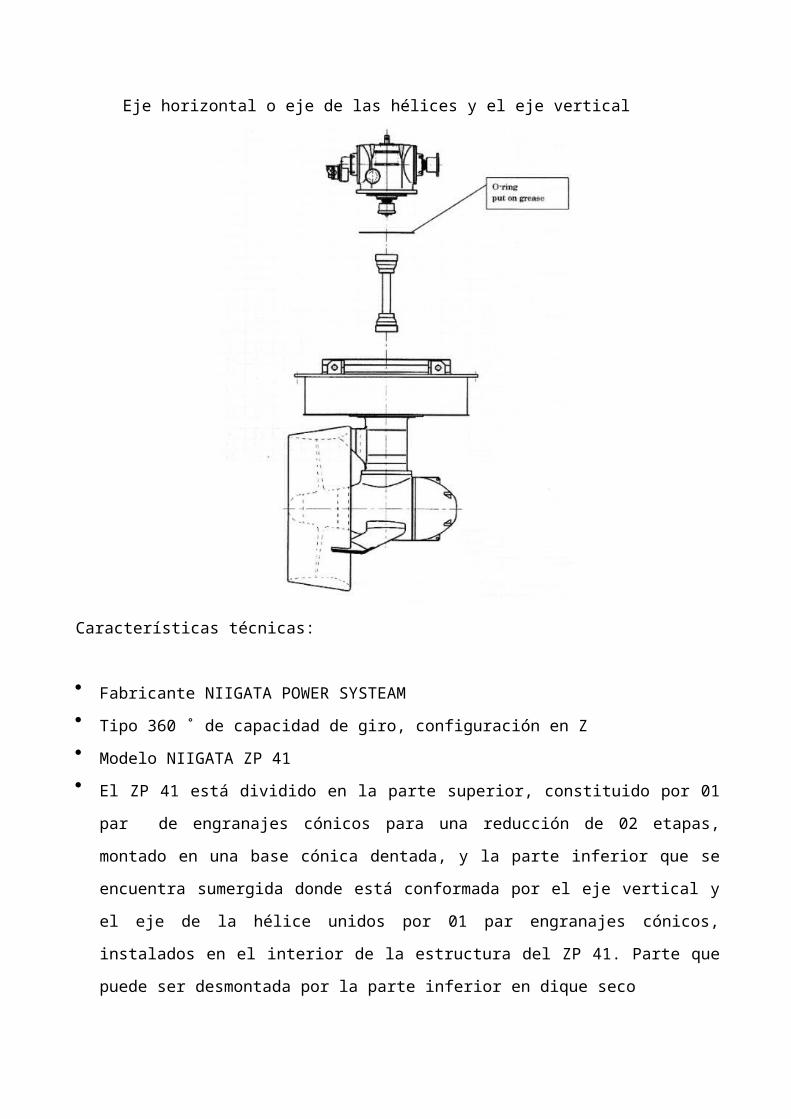
Eje horizontal o eje de las hélices y el eje vertical
Características técnicas:
Fabricante NIIGATA POWER SYSTEAM
Tipo 360 ˚ de capacidad de giro, configuración en Z
Modelo NIIGATA ZP 41
El ZP 41 está dividido en la parte superior, constituido por 01 par de engranajes
cónicos para una reducción de 02 etapas, montado en una base cónica dentada, y la
parte inferior que se encuentra sumergida donde está conformada por el eje vertical y
el eje de la hélice unidos por 01 par engranajes cónicos, instalados en el interior de la
estructura del ZP 41. Parte que puede ser desmontada por la parte inferior en dique
seco
Max potencia 2206 (3000 PS)
Velocidad del eje de entrada 750 RPM
Régimen en sobrecarga y velocidad 2426 KW (3300 PS) / 774 RPM
Velocidad de la hélice 220 RPM
Reducción 3.416

Hélice
o Tipo mono bloque, 4 palas, Angulo fijo, tipo Skewen Kaplan con tobera
o Diámetro 2700 mm
o Material Níquel, bronce y aluminio (LRS Grade Ca-3 JIS CAC703)
o Rotación vista de popa
Babor horario
Estribor anti horario
o Cono de la hélice con Propeller Boss Cap Fin, pequeña hélice que mejora la
eficiencia
Tobera
Sello del eje de la hélice
N de anillo de sello, 01 lado aceite y 02 lado agua
Sistema de lubricación, forzada mediante bomba acoplada al eje horizontal. Tipo de
aceite, hidráulico ISO VG 100
Volumen aprox por unidad 2400 lts
Masa aprox 31 Ton por unidad
El ZP 41 tiene instalado una serie de accesorios necesarios para su trabajo normal y
seguridades (detalles manual de especificaciones técnicas de NIIGATA MARINE
DIESEL ENGINE. spec n Z7023-10B)
Sistema de gobierno, accionado hidráulicamente mediante una bomba hidráulica
acoplada a la caja
Angulo de gobierno 360 ˚, velocidad de accionamiento aprox 12 seg. 180 ˚ a 12 nudos,
20 seg 360˚ (3 RPM)
Especificación del aceite anti desgaste aceite hidráulico ISO VG 46, volumen aprox 250
lts
Reducciones y motor hidráulicos montados, que serán los encargados del movimiento
de la tobera
El sistema de gobierno tiene una serie de accesorios que complementan la operación
(detalles manual de especificaciones técnicas de NIIGATA MARINE DIESEL ENGINE.
spec n Z7023-10B)
1.4.4 Componente de control

Los componentes de control tienen como medio para la operación una fuente eléctrica y el
aire comprimido. El control se realiza desde el puente en una operación normal, donde los
GSO Lever son los mandos combinados que controlan, la velocidad del motor y las hélice,
así como el encroche y desencroche de la propulsión de los motores diesel, y
principalmente el gobierno de la nave. Estos mando conectados a través de los cuadros
de control y los sistemas de comando electrónico permiten la interacción de los mandos y
los demás componentes de fuerza, trasmisión, propulsión y gobierno. Todo el sistema
trabaja con una fuente de energía de DC 24V
Descripción técnica
Fuente eléctrica, la fuente principal es suplido por los generados de abordo
o Fuente principal AC230 V x 50 Hz x 1 fase x aprox 1 KVA x 2
Fluctuaciones de voltaje + 6 % - -10%
Fluctuaciones de frecuencia +5 % - -5%
o Fuente de respaldo DC24V (baterías) x aprox 500 W x 2
Fluctuaciones de voltaje +- 10 %
o Las fuentes están distribuidas de manera independiente a cada grupo de control
proporcionando una protección a cada uno de ellos
La fuente de aire comprimido para el sistema de control que asegura la presión de 0.7
Mpa, es proporcionada por los reservorios del aire de arranque a través de una
estación reductora, la cual es usada para el control de la velocidad del motor, parada
automática del motor y el control de deslizamiento de la caja.
Como se describió con antelación los GSO lever tienen los comandos sobre los
componentes, pero existe elementos adicionales de comando que no son controlados
por estos mandos los cuales permitirán el complemento de los controles, tal son los
cuadro de control donde encontramos lo sgte
o Arranque y parada de motores
o Las paradas automáticas de seguridad
o La anulación de las paradas automáticas de seguridad
o Cambios de comandos puente – maquinas
o Indicadores de posición de la tobera, RPM de los motores y hélices
Para el arranque de maquinas principales existen una serie de dispositivos de
seguridad que son las interfaces previos a esta función las cuales serán verificadas
o La barra de virado debe ser colocada en su posición
o GSO lever en posición OFF
o La presión de arranque normal
o Palanca de control del motor en posición arranque
o Maquinas principal deben estar paradas
o Presión de aceite será normal.
Los accesorios que conforman los controles estarán detallados en el manual de
especificaciones técnicas de NIIGATA MARINE DIESEL ENGINE. spec n Z7023-10B
.5. Principio de funcionamiento:
El principio aplicado al sistema es de un control independiente para cada hélice acimutal,
que es un sistema de seguimiento “follow up remoto control system”, mediante el control
remoto desde el puente y que es independiente para el control de cada una de las dos
hélices que están montadas en el remolcador. La unidad básica de operación es la unidad
de control principal o GSO lever que es una simple palanca que puede girar 90˚ en sentido
vertical y 360˚ en sentido horizontal con lo que se consigue el control de la orientación, las
rpm y el embrague de la hélice.
El sistema de control de las hélices incluye adicionalmente un sistema secundario sin
seguimiento “non follow- up”, conocido como gobierno secundario, que en caso de
emergencia se utiliza para reemplazar a los GSO lever, este sistema consiste en dos
pulsadores de conexiones eléctricas directas e independientes a cada hélices en forma de
circuito electrónico.

NIIGATA incorpora una serie de procedimientos antes de la puesta en marcha de sus
equipos los cuales permitirán al operario asegurar un correcto funcionamiento, los
protocolos permitirán minimizar errores y elevar la seguridad. Entre estos protocolos
tenemos
Protocolo cambio de la posición de control, que es el traslado del control de los equipos
a) Cambio de posición de gobierno (ZP solo)
b) Cambio de posición control motor (solo)
Protocolo para la operación de las bombas pre lubricadoras
Secuencia de arranque y parada de las maquinas principales
Protocolo de la puesta en marcha de la FIFI
Protocolo del mando secundario
Protocolo del auto piloto.
El funcionamiento del sistema estará dividida en mando sobre el motor / propulsión y
sobre el gobierno, en una situación normal se inicia con la puesta en marcha de los
motores diesel y el traslado del mando a los GSO lever, cumpliendo los protocolos ya
establecidos, para el
primer caso sobre los mandos colocando la misma en la primera posición, se emite una
señal al control electrónico de la caja la cual comandara a través de la señal que emita
sobre una válvula solenoide proporcional, que utiliza la presión piloto y regula la presión
del embrague para dar la velocidad que emita el controlador, todo esto será retrasmitido
por medio de los pickup o sensores de velocidad que serán interpretadas por las tarjetas
de control del sistema que como medio de retroalimentación para que se cumpla el
comando emitido, todo este proceso se realiza para la función de deslizamiento, en la
modalidad de full slip en donde el controlador regula presión de acople al máximo a través
de la válvula solenoide de acople directo, permitiendo trasmitir la velocidad y fuerza del
motor.
Para el segundo caso el giro del mando emitirá una señal en la dirección a la cual se
moverá la tobera, señal que gobierna la válvula shuttel o direccional que es direccionar el
flujo sobre las líneas de los motores hidráulicos que acoplados a las reductoras giraran la
tobera, en el mismo ZP existe un mecanismo que controla la posición de la tobera y que
retrasmite la posición del mismo a la tarjeta de control del ZP y la cual llegada a la orden
emitida corta la señal del mando a la válvula direccional.
Ambas funciones combinadas permiten dar al remolcador el desplazamiento y la dirección
necesaria para la operación deseada.
2. Manual de mantenimiento
2.1. Pruebas e inspecciones del equipo: cómo sé que está haciendo lo que debe hacer?
2.1.1. Inspección en operación
Para el monitoreo de parámetros se utiliza un formato que es llevado en el libro de
bitácoras de maquinas, donde se registran los parámetros de los equipos, para
posteriormente ser evaluados de acuerdo al fabricante.
Hoja de control de parámetros

Para su verificación y control existe los cuadros de monitoreo y alarmas
A su vez existe un sistema de monitoreo computarizado que recibe y controla los
parámetros de los componentes en tiempo de operación
UMS encargado del monitoreo en operación de los componentes
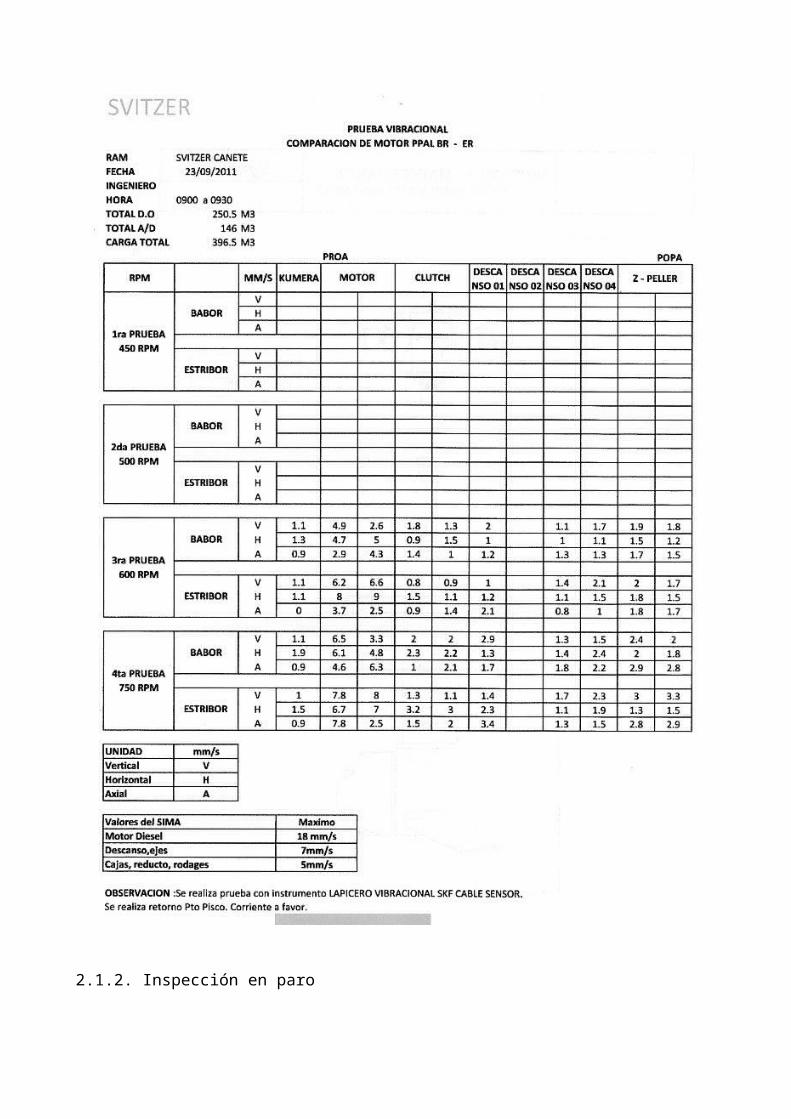
Para los análisis predictivos que se realizan abordo se tiene un formato para tomas de
vibraciones, básicamente se realiza en el eje intermedio.
Formato prueba vibracional.

2.1.2. Inspección en paro

De acuerdo al plan de mantenimiento de cada equipo existe una serie de inspecciones a
realizar para ello existe una serie de formatos que ayuda a estas tareas.
En este caso las inspecciones más frecuentes la tiene los motores diesel, ya que por las
características de trabajo requiere más control, al contrario de los demás equipos las
inspecciones son mas espaciadas, siendo el análisis de aceite y limpieza de filtros los
trabajos de mayor rotación. Sin obviar las inspecciones mayores pero estas estarán
descritas en el manual de cada equipo.
En la inspección de Motores diesel tenemos
Formato de toma de flexiones
Hoja de verificación de inyectores
Hoja de holguras y tolerancias

En las inspecciones de caja
Hoja de holguras y tolerancias (manual de instrucción HIDRAULIC CLUTCH
MODEL HLP85Y WITH ELECTRONIC CONTROLLER, n. IM005378G)
En las inspecciones del ZP
Hoja de holguras y tolerancias (manual de instrucción NIIGATA ZPeller modelo ZP
41)
En las tareas de mantenimiento se ha confeccionado una serie de recomendaciones con
el fin de reducir los riesgos de accidentes.
SVITZER
Recomendaciones básicas antes de empezar una tarea
1. Perdidas de aceite lubricante del equipo o de las líneas de lubricación pueden
incrementar el peligro de fuego
2. El uso del EPP es obligatorio para tarea
3. Trabajos en sala de maquinas o espacios cerrados puedes llevar danos o lesiones
en las manos
4. Las fallas en el manejo del agua de refrigeración, aceite lubricante, y el seguro
ajuste de los componentes cuando han sido re ensamblados después de un
mantenimiento o inspección puede llevar a lesiones o muerte, por tal motivo siga las
instrucciones que recomienda le fabricante.
5. Evalué la situaciones de riesgo con el grupo de trabajo
6. Utilice elementos de maniobra en buen estado y certificados
En cada manual se encontrara las normas de seguridad de acuerdo a la tarea a realizar
siendo las más básicas descritas anteriormente.
Se considera la necesidad de revisar el equipo estando fuera de servicio para detectar
desgastes o deformaciones de ciertas partes que no pueden inspeccionarse durante el
servicio.

Se incluyen las recomendaciones del fabricante con respecto a todas las tareas que
requiere el equipo como mantenimiento preventivo para asegurar su correcto
funcionamiento.
2.1.3. Pruebas: ¿cuáles son los parámetros de entradas y salidas?
Las pruebas se realizan para verificar básicamente las entradas y las salidas. Se
establecen los parámetros ideales del equipo y se mencionan los valores de entradas y
salidas. Se verifican las condiciones de antes, durante y después del arranque de equipo.
Se apoya en las hojas de inspección para no repetir la información.
Hoja toma de desempeño del motor
Hoja de curvas de fuerza, se evalúa el desempeño del motor y su evolución en el tiempo
Para ser más específicos se pueden revisar los manuales
Lista de parámetros del motor (manual de instrucción NIIGATA Motor Diesel modelo
8L28HX
Lista de parámetros ZP y eje intermedio (manual de instrucción NIIGATA ZPeller
modelo ZP 41, Sección 1, 1.1 Especificaciones generales, 1.1.2 Temperatura y
presiones)
Lista de parámetros Caja (manual de instrucción HIDRAULIC CLUTCH MODEL
HLP85Y WITH ELECTRONIC CONTROLLER, n. IM005378G, Capitulo 1
especificaciones, 1.3 Presiones y temperaturas especificas, pag. 2).
2.2. Ajustes: ¿qué debo hacer para que haga lo que debe hacer?
Los ajustes necesarios dentro del sistema se realizan básicamente a los motores diesel
ya que los parámetros para los demás equipos ya están establecidos por el fabricante, en
este caso de acuerdo a las evaluaciones de rendimiento se calibran y ajustan los
timbrados de inyectores, en caso que sean necesario se regulara el varillado de las
bombas para alcanzar un estado ideal (como base se tiene las pruebas hechas en las
actas de entrega), todo esto descartando que la descompresión no es por desgaste de los
elementos alternativos.
Hoja de regulación de inyectores
Hoja de evaluación de rendimiento. Pruebas de compresión
Existen otras regulaciones que se realizan en base a controles diarios y dependiendo de
las temperaturas del medio, como la temperatura de los enfriadores de aire de barrido.
Existe un plan de calibración de los elementos de seguridad y control que son revisados
periódicamente, donde los elementos son calibrados de acuerdo a las necesidades de la
planta o reemplazados según el defecto
Plan de calibración
Se establecen los ajustes que se deben considerar en el “todo”, dando las
especificaciones y rangos permisibles. Se identifican si los ajustes se refieren al equipo o
si son exclusivos de los conjuntos funcionales.
2.3. Detección de fallas: ¿cómo determino lo que no está funcionando?
Se usa un enfoque sistémico mirando la calidad y valores de las entradas y salidas al
sistema o equipo, siguiendo una secuencia lógica:
a. Diagnóstico del problema.
b. Operación apropiada (condiciones normales de operación del equipo y del proceso).
c. Problemas históricos.
d. Detección analítica de fallas.
2.3.1. Detección de fallas históricas

Lista de los síntomas que ha presentado el equipo dada una anormalidad y las posibles
causas y remedios para dicho síntoma. Basada n la experiencia previa.
2.3.2. Detección analítica de fallas
La detección analítica de fallas está basada en el árbol de detección de fallas. Se describe
la secuencia a seguir en una detección analítica marcando las normalidades que debe
cumplir el equipo y sus conjuntos.
2.4. Reparaciones: ¿cómo lo arreglo?
Se emplea la información del fabricante y la experiencia con la que se cuenta sobre el
particular para definir las tareas de reparación y estructurar los procedimientos
correspondientes que incluyen:
1) Preparativos: 1a) mano de obra necesaria, 1b) repuestos y materiales, 1c) herramientas
y equipos de prueba, 1d) tiempos de reparación;
2) Desconexión;
3) Desmontaje;
4) Desarmado en taller;
5) Evaluación de partes;
6) Armado;
7) Montaje.
2.5. Seguridad y medio ambiente: ¿cómo lo hago con precaución?
Para hacer una intervención debe verificarse por ejemplo: 1) Que la máquina este
detenida, 2) Abrir el interruptor del arrancador correspondiente al motor, 3) Colocar la
tarjeta de seguridad y candado en el interruptor para evitar su puesta en marcha
accidentalmente, 4) Cerrar las líneas de succión, descarga y by pass, 5) Despresurizar el
equipo, 6) Usar la herramienta adecuada y en buen estado, 7) Usar EPP.
Ver en los Anexos: Ejemplo de “Manual de mantenimiento” para una bomba vertical de
agua, página 18.
3. Material de evaluación
3.1. Hoja Análisis para mantenimiento de equipo. Ver Anexos (página 33)
3.2. Lista de calificación. Ver Anexos (página 34).

REMOLCADORES PLNG
LISTA DE VERIFICACION DIARIA(ENGINE ROOM DIALY CHECKLIST)
Responsabilidad / Responsibility: Jefe de Maquinas / Chief EngineerFecha: ___________________________ Nombre: _________________________
1 Nivel de aceite del carter y regulador de la maquina principalOil level m/e , sump and regulator
2Nivel de aceite del servomotor BR / ER y tanque de expansiónOil level gear servo and expansion tank
3 Nivel de aceite carter del clucht BR / EROil level sump clutch
4Nivel de aceite de carter de generadores diesel e indicador aireOil level sump diesel generator and air filter indicator
5 Nivel de aceite de compresores de aire arranque de maq. principalOil level air start main compressor
6Nivel de aceite de compresores aire acondicionadoOil level air conditioning system compressor
7 Nivel de aceite de compresores de planta refrigeración provisionesOil level sump provision refrigeration system compressor
8 Nivel de aceite del gobernadorOil level governor

9 Nivel aceite del tank expasion de power packOil level expasion tank hydraulic system power pack
10Nivel de aceite del sistema fifiOil level in gear for fifi installation
11 Nivel de tanques diarios de combustibleF.o level in service tank
12Dren de botellas de aire de arranque m/pDrain starting air containers
13 Nivel de aceite de purificadorOil level purifier
14Dren tanques diarios de combustibleDrain f.o service tank
15Presiones y temperaturas maquina principal y maquinas auxiliaresPressure and temperature of main engine and auxiliar engine
16 Nivel del tanque expansión de agua dulce de maq. Ppl. Y maq. Aux.Water level expasion tank of main engine and auxiliar engine
17 Inspección de sentinas y pozos de sentinaCheck of bilge engine room
___________________________________Firma del responsable / Responsible sign





![Propio No Propio[1]](https://static.fdocuments.ec/doc/165x107/5571f7c449795991698bf612/propio-no-propio1.jpg)











