COLOCAR EN POSICIÓN CLASE DE AJUSTE SIMETRÍA FÁCIL DE...
16
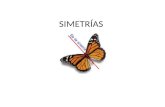
COLOCAR EN POSICIÓN CLASE DE AJUSTE SIMETRÍA FÁCIL DE MANEJ. DIFÍCIL DE MANEJ. HOLGADO ESTRECHO 3 EXACTO No se requiere presión. Se requiere una ligera presión Se necesita no- table presión s ss NS S ss NS S SS NS 5.6 9.1 10.4 16.2 19.7 21.0 43.0 16.5 47.8 11.2 14.7 16.0 21.8 25.3 26.6 48.6 52.1 53.4
Transcript of COLOCAR EN POSICIÓN CLASE DE AJUSTE SIMETRÍA FÁCIL DE...

COLOCAR EN POSICIÓN
CLASE DE AJUSTE SIMETRÍA FÁCIL DE MANEJ. DIFÍCIL DE MANEJ.
HOLGADO
ESTRECHO
3 EXACTO
No se requiere
presión.
Se requiere una
ligera presión
Se necesita no
table presión
s ss NS
S
ss NS
S SS NS
5 . 6 9 . 1
1 0 . 4
1 6 . 2 1 9 . 7 2 1 . 0
4 3 . 0 1 6 . 5 4 7 . 8
1 1 . 2 1 4 . 7 16 .0
2 1 . 8 2 5 . 3 2 6 . 6
4 8 . 6 5 2 . 1 5 3 . 4

Definición.
Colocar en posición es la acción básica manual usada para al inear , or ien
tar y ensamblar dos o más objetos en una relación física definida con mo
vimientos tan cortos o de t a l naturaleza que no justifican analizarlos c o
mo elementos bás icos independientes .
Colocar en posición es ta limitado por la profundidad de inserción del ob
jeto la cual no puede ser mayor que una pulgada.
En todos los ejemplos la distancia que se mueve el objeto no es mayor que
1" . Si ello ocurre es porque antes o después del elemento. Colocar en p o
sición existen otros movimientos.
Este elemento lo pueden efectuar únicamente los dedos y /o la mano porque
los demás miembros del cuerpo no pueden dar la precisión que requiere .
Para colocar en posición es necesario que un objeto sea móvil, el otro
objeto puede ser fijo o móvil . El fin del movimiento es colocar los objetos
guardando una relación fisica entre e l l o s .
El movimiento es ta compuesto de los elementos básicos Alcanzar, Mover
y aplicar Presión ( a veces Girar y Rotar Manubrio) los cuales se combinan
para formar las t res e tapas de Colocar en Posición que son al inear , orien
tar y ensamblar. — ~. "• M> .

Tienen importancia en és te elemento no solo los movimientos del operario
sino también las relaciones f ísicas de los objetos que se colocan en po
s ic ión, las cuales determinan la c l a se de a jus te , la facilidad de manejo
y el grado de simetría como se verá luego.
Cuando colocar en posición no se ajuste completamente la definición se
debe analizar por la teoría de Colocar en Posición en la cual se descom
pone cada caso en sus elementos b á s i c o s .
COMPONENTES DE COLOCAR EN POSICIÓN'
Para tratar és te tópico se supone que se trabaja con dos objetos , aunque
colocar en posición puede incluir más de d o s .
El objeto que sost iene el operario en la mano es la parte que se mueve en
el elemento y se llama "parte ensamblante" .
El otro objeto que puede estar es tacionar io , sostenida en la mano o movién
dose de acuerdo con el otro se llama "parte ensamblada" .
Por ejemplo: Al colocar un tomil lo en un hueco, la parte ensamblante es
el tornillo y la parte ensamblada es el objeto que t iene el hueco .
Colocar en posición t iene t res componentes : Alinear, orientar y ensamblar,
sinembargo cualquiera de el los puede no existir en el movimiento.

1. Alinear,
Consta de todos los movimientos bás icos requeridos para hacer
coincidir el eje de inserción de l as partes ensamblante y ensambla
d a .
El eje de inserción es la línea imaginaria a lo largo de la cual se
debe desplazar el eje de la parte ensamblante . Esta formada por los
ejes de la parte ensamblada y ensamblante una vez efectuado el mo
vimiento .
Alinear consis te únicamente en hacer coincidir los ejes de inserción
y ello se puede lograr de acuerdo con la posición relativa de los ob
jetos antes del movimiento, a s í :
1 . Si los ejes coinciden no hay necesidad de al inear .
2 . Si los ejes se cortan en ángulo hay necesidad de efectuar so l a
mente un girar puro.
3 . Si los ejes son paralelos es necesario solamente efectuar un
mover puro.
4 . Lo que generalmente ocurre, es que haya que efectuar ambos mo
ver y girar.

Todos és tos movimientos son muy cortos y por lo tanto el objeto d e
be haber sido localizado en forma aproximada antes de efectuar el
Colocar en Posición. De esto se deduce una regla importante en
MTM "Todo mover que preceda a colocar en posición debe ser caso
C " . Como consecuencia de ella se puede decir que cuando un obje
to se coloque adecuadamente con mover caso A ó B no necesi ta c o
locar en posic ión.
Alinear t iene un valor de 5.6 TMU y es el tipo más sencil lo de colo
car en posición que puede ocurrir.
Orientar.
Incluye todos los movimientos necesarios para "casar" geométrica
mente las partes a ensamblar.
Si el hueco de ensamble es ta en la parte ensamblante , lo anterior
también se cumple.
Como en és te punto ya se han hecho coincidir los ejes de inserción,
basta con movimientos giratorios de los dedos o la mano para llevar
los objetos a la colocación adecuada para hacer el ensamble .
La cantidad de movimientos y el tiempo necesario para orientar d e
penden de la simetría de los objetos , es decir del número de p o s i
ciones en las cua les los objetos se pueden ensamblar, que a su vez

determinan los grados que se debe girar el objeto para orientarlo.
Ensamblar.
Incluye todos los movimientos requeridos para efectuar hasta una
pulgada de inserción de la parte ensamblante en la parte ensambla
da , como culminación de los movimientos de alinear y orientar.
Esta compuesto por los elementos mover (hasta 1"), aplicar presión
y recolocar para mantener el control .
El mover dentro de ensamblar puede ser máximo hasta 1" por lo t a n
to s i se presenta una dis tancia recorrida mayor que e s a , al exceso
se le debe permitir el tiempo apropiado, tratándolo como un mover
puro .
Se aplica presión para vencer la res is tencia a la inserción. La mag
nitud de ella depende del grado de ajuste entre las partes a ensam
blar .
Recolocar es necesario para efectuar el ensamble de las pa r tes , man
teniendo el control del objeto. Las veces que se haya de recolocar
se han obtenido de las pel ículas sobre és te movimiento y dependen
en gran parte de la dificultad de manejo del objeto.
El tiempo necesar io para ensamblar depende del caso aplicar presión

que se requiera .
VARIABLES DE COLOCAR EN POSICIÓN.
Las variables que afectan el tiempo empleado por el movimiento, son:
Clase de ajuste (3 c l a s e s ) , grado de simetría (3 grados) y facilidad de
manejo (2 posibi l idades) .
Las combinaciones resul tantes de las variables llegan en total a 18 .
1. C lase de a jus te .
Es una medida del espacio libre entre l a s partes a ensamblar y de
la presión necesar ia para efectuar el ensamble .
La c l a se de ajuste afecta el tiempo requerido para "ensamblar".
Comunmente el espacio libre entre las partes varía desde prac t ica-
mente cero hasta amplios espacios donde solo se requiere mover.
El tiempo del elemento varía de acuerdo con e se espacio l ib re .
Sinembargo en MTM se han limitado todas é s t a s posibi l idades a
t res c a l s e s de a j u s t e s .
Por otra par te , la c l a se de ajuste entre l a s partes determina la p re
sión que es necesar io ejercer para ensamblarlas; mientras menor sea
el espacio entre e l las más presión hay que ejercer para su ensamble
y por lo tanto mayor tiempo consume el movimiento.
Para determinar el grado de ajuste se puede medir bien sea el e s p a
cio libre entre las partes o la presión necesaria para ensamblar las .

Se obtiene el espacio libre restando al diámetro de la parte ensam
blada el de la ensamblante; as í : una varilla de 1/4" en un hueco
de 5/16" deja un espacio libre de 1/16". Cuando se trata de figu
ras irregulares es más difícil apreciar es ta medida, pero se debe
seguir la misma norma.
Para medir la presión necesaria para ensamblar las partes se pue
de efectuar una prueba sencil la colocar las partes como van a ir
ensambladas y luego soltar la parte ensamblante . Si se efectúa com
pletamente el ensamble, no se necesi ta presión para el ensamble .
Si se necesi ta un ligero empuje de los dedos para la inserción, se
necesi ta una ligera presión. Si hay que coger la parte y aplicar una
fuerza apreciable , se necesi ta alta presión para ensamblar.
Se han agrupado las c l a se s posibles de ajuste en tres categorías :
' ^ Clase de Ajuste.
1 . Holgado
2 . Estrecho
3 . Exacto,
Espacio Libre Presión
Apreciable pero no mayor Ninguna, que 1/2" en total
Visible, las partes es tán Ligera, a justadas pero aún se d e s lizan con muy poca r e s i s tencia o fricción.
No v is ib le , muy poca t o l e - Alta, rancia , pero las partes aún se pueden ensamblar manualmente .

Una ayuda para la clasif icación es la siguiente : Si hay duda de que el
elemento es solamaite movec el ajuste es c lase 1; cuando hay dificultad
evidente para el ensamble, el ajuste es c lase 3; en los demás casos el
ajuste es c l a s e . 2 .
El ajuste c lase 2 es el más común en la industria, el que le sigue es el
de c l a se 1 y el de c lase 3 es raro encontrarlo en operaciones industr iales,
La c l a se de ajuste influye en el elemento "ensamblar" determinando el
t ipo de aplicar presión y por lo tanto el tiempo requerido, a s í :
C lase de Ajuste Aplicar Presión
1 Ninguno
2 AP 2
3 AP 2 + AP 2 + AP 1
2 . Grado de Simetría.
Tie
0
10
37
mpo
.0
.6
.4
Describe las propiedades geométricas de las partes a ensamblar en
cuanto que e l las afectan la cantidad de orientación anterior al en
samble .
El grado de simetría afecta el tiempo consumido para "orientar" y
se ha medido de acuerdo con el número de orientaciones en las cua
les es posible el ensamble .

Por ejemplo: ensamblar un cilindro en un hueco circular t iene un
número infinito de orientaciones en cualquiera de las cua les se
puede ensamblar; un rectángulo en un hueco rectangular t iene dos
orientaciones posibles para el ensamble; un triángulo de lados d e
s iguales t iene solamente una.
Los t res grados de simetría separados para MTM son como siguen:
Grado de Simetría Simbolo
Simétrico
Semi-simétrico
No Simétrico
SS
NS
Descripción.
Las partes pueden ensamblarse en un infinito número de orientaciones alrededor del eje de inserción.
Las partes se pueden ensamblar en dos o más or ientaciones (hasta 8) alrededor del eje de inserción.
Las partes solo se pueden ensamblar en una orientación alrededor del eje de inserción.
Hay que notar que para apreciar el grado de simetría se deben con
siderar las formas de ambas p a r t e s .
Por ejemplo una barra cuadrada de un hueco cuadrado es semisimé-
t r i co , pero la misma barra cuadrada en un hueco circular es s imé
t r i c o . , - -
Cuando se usan guías para el ensamble hay que observar la ac tua
ción del operario pues ocurre que ensambles que por las formas de

s
ss
NS
T 0
T 45
T 75
las partes son no simétricos pueden volverse semisimétricos o simé
tr icos cuando se usan g u i a s .
El grado de simetría afecta el elemento "orientar" determinando el
número de grados que es necesario girar el objeto y por lo tanto el
tiempo requerido para orientarlo a s í :
Grado de Simetría Giros Tiempo
0.0
3 .5
4 .8
FACILIDAD DE MANEJO.
La pieza ensamblante es fácil de manejar e j . durante el Colocar en pos i
ción no se efectúa cambio en el agarre (Recolocar) es la p ieza .
Para decidir si la parte es fácil o difícil de manejar se deben tener en
cuenta su r ig ides , tamaño y manera como el trabajador la coge; además
se debe considerar la c l a se de ajuste pues mientras más estrecho sea
és te más control se necesi ta y mayor dificultad de manejo se presenta .
Una parte rígida puede controlarse fácilmente a menos que es té cogida
a cierta dis tancia del punto de ensamble, dependiendo de la c lase de
a jus te .

Objetos flexibles t a l e s como alambre, hilo y algunas c l a se s de resortes
son difíciles de manejar a menos que se cojan muy cerca al punto de en
samble, aún para ajustes ho lgados . Como referencia se puede es tablecer
que es difícil de manejar una varilla de 1/16" de diámetro para insertarla
en un hueco estrecho si no se coge a menos de 1/2" del extremo.
Por otra parte es fácil de manejar un barra rígida liviana de 3" de diáme
tro para insertarla en un hueco holgado cogiendo a 3 ó 5" del extremo.
La dificultad de manejo afecta todo el tiempo para colocar en posición
porque añade un recolocar ( G 2 ) cuyo tiempo es 5.6 TMU.
REPRESENTACIÓN DE COLOCAR EN POSICIÓN
1. Se anota la P para representar el e lemento.
2 . El número correspondiente a la c lase de a jus te .
3 . La letra o letras para representar el grado de simetr ía .
4 . Se anota la E para significar fácil de manejar o una D para signifi
car difícil de manejar.
TIEMPOS DE COLOCAR EN POSICIÓN.
Los tiempos para és te elemento se dan en la tabla V de MTM. Para usar
la se localiza la c l a se de ajuste en la primera columna y en el renglón
que corresponda, al grado de simetría, se lee en la cuarta o quinta c o -

lumna según sea el objeto fácil o difícil de manejar.
CASOS ESPECIALES'
Algunos ca sos que se presentan prácticamente es necesario t ratar los por
separado y de ellos se va a continuación;
1 . Colocar en Posición respecto a un punto o una Línea.
Algunas veces se ha llamado és te movimiento erróneamente "solo
a l inear" . Actualmente se sabe que és te solamente puede incluir
alinear y orientar y que el ensamble consis te únicamente en hacer
contacto con el punto o la línea respecto al cual se va a colocar el
objeto en posición. Como ejemplos se t iene :
1 . Localizar la punta de un lápiz en la intersección de varias l í
neas (alinear solamente) .
2 . Localizar un punzón en una marca, punto ó intersección (a l i
near y algo de orientar) .
3 . Sumergir un objeto en un líquido hasta cierta profundidad o h a s
ta una línea doble alinear o alinear y orientar al límite f inal) .
4 . Alinear una regla a un punto, dos puntos o una línea para medir
o para trazar una l ínea .
Como el alineamiento puede ser aproximado o exacto se han d e s a
rrollado los s iguientes límites para su clasif icación :

A. Para alinear de 1/2 a 1/4" M C Solamente
B. Para alinear de 1/4 a 1/16" PISE ó PISD
C . Para alinear de 1/16 a 1/64" P 2 SE ó P 2 SD
D . Para alinear de 1/64 ó menos P 3 SE ó P 3 SD
(Examinar s i exis te alineamiento múltiple) .
Para usar las reglas anteriores se requiere buen cr i ter io . Po Ejmplo.
localizar un punto aproximadamente debe ser PISE pero si se n e c e s i
ta localizarlo más exactamente cambia a P 2SE . Los anál is is son vá
lidos para varios puntos siempre y cuando no es tén separados más
de 3 ó 4 " .
Para un separación de más de 4" lógicamente SB requiere más de un
alineamiento y posiblemente exis te algo de orientación. Para loca
l izar dos puntos 1 pie se necesi tan "3 "Colocar en Posic ión" .
1.) Localizar el punto de la izquierda; 2.) Localizar el de la dere
cha; 3 .) Corregir la desviación en el punto de la izquierda; cada
uno de és tos colocar en posición se debe considerar para permitir
e l t iempo.
2 . Colocar en Posición la Mano .
En algunas operaciones la mano o los dedos se deben localizar en
alguna orientación definida en el lugar de trabajo antes del próximo

movimiento.
Una regla de MTM establece que colocar en posición los dedos o la
mano es un caso simétrico de orientar .
Un ejemplo de es to ocurre cuando, después de un alcanzar caso B
o caso A un objeto colocado en un lugar de suministro en una forma
definida, la mano y los dedos se deben orientar para coger el obje
t o . Sinembargo se debe tener cuidado de no permitir colocar en po
sición cuando un Alcanzar Girando es suf ic iente .
3 . Mover y Colocar en Posición.
No todo movimiento en el cual se incluye insertar o colocar una par
te en otra es Colocar en Posición. Muchos de es tos casos son so la
mente M-B o M-C y para decidirlo se deben tener en cuenta las t o
lerancias nombradas en mover y colocar en posic ión.
Así, t irar un objeto en una bandeja es un caso de mover ya mencio
nado; ordenar el objeto en un almacenamiento ordinariamente M-C;
pero si se necesi ta colocar precisamente el objeto en el lugar de a l
macenamiento se requiere Colocar en Posición, posterior al M-C .
Otro ejemplo que no requiere Colocar en posición es dejar caer un
objeto cónico para introducirlo en un hueco cónico .
Cuando la dis tancia movida en la inserción de la parte es mayor que

1", el colocar en Posición debe ser seguido por un mover sobre el
exceso de d i s t anc ia . El c a so de Mover será A debido a la guía p a
ra el movimiento; puede sinembargo ser caso B cuando la inserción
e s muy profunda y la acción de la guía no es muy efectiva; puede
ser también posible que el mover sea caso C cuando la inserción
se debe terminar en un lugar preciso y aún darse el caso que a é s
t e M-C lo siga un P para obtener una localización prec i sa .
Cuando la parte ensamblante es ta sostenida por una herramienta,
e l Colocar en Posición y el mover precedente no difieren en su aná
l i s i s de cuando se sost iene en la mano, porque la herramienta es
solo una prolongación de é s t a . Sinembargo el uso de herramienta
puede aumentar la clasif icación del Colocar en Posición en cuanto
que aumenta la dificultad de manejo de la pa r te .
4 . Múltiple Colocar en Posición.
En muchas operaciones industr iales se ocurre que para ensamblar
una parte en otra haya necesidad de Colocar en Posición varias v e
ces . En ta les casos se debe analizar siguiendo estrictamente el or
den en que ocurren pues el primer colocar en posición influye gran
demente en el segundo puesto que limita las posibles local izaciones