Clase 1 - Análisis Numérico
45
CLASE 1 Preliminares UNIVERSIDAD DE LA REPÚBLICA INGENIERÍA CIVIL DE MINAS CÁLCULO NUMÉRICO DOCENTE: Felipe Quezada Castañeda
-
Upload
felipe-quezada-castaneda -
Category
Documents
-
view
22 -
download
1
description
análisis numérico intro.
Transcript of Clase 1 - Análisis Numérico

CLASE 1Preliminares
UNIVERSIDAD DE LA REPÚBLICAINGENIERÍA CIVIL DE MINASCÁLCULO NUMÉRICO
DOCENTE:Felipe Quezada Castañeda

Introducción
El Cálculo Numérico corresponde a la rama del Análisiscuyo objetivo es el diseño de modelos y algoritmos quepermitan, mediante operaciones elementales sencillas,simular procesos matemáticos más complejos.
Por ejemplo, tenemos el problema de resolver lasiguiente integral, definida como
𝐾 𝑥 = 0
𝜋/2 𝑑𝜃
1 − 𝑥 sin2 𝜃
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Introducción (Cont.)
La integral anterior, llamada integral elíptica de primeraespecie, no puede ser resuelta mediante ninguna de lastécnicas algebraicas estudiadas en los cursos elementales deCálculo. Vale decir, no existe ninguna función 𝐾 𝑥 cuya
derivada sea igual a 𝐾′ 𝑥 =𝑑𝜃
1−𝑥 sin2 𝜃.
Por lo tanto, cabe hacernos la siguiente pregunta: ¿Quésucedería si algún proceso ingenieril importante dependierade la resolución de esta integral? ¿Cómo lo haría uncomputador para poder resolver este problema, si noexisten técnicas algebraicas capaces de solucionarlo?
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Introducción (Cont.)
La respuesta es una sola:
¡ALGORITMOS!
Un algoritmo es una serie de reglas matemáticas sencillasque, mediante fórmulas de recurrencia listadas en pasos(obviamente finitos), permiten realizar una actividadmediante instrucciones claras y precisas. Naturalmente, enanálisis, dichas actividades implican solucionar problemasmatemáticos complejos o que, en el ejemplo anterior,resolver problemas muy difíciles de solucionar por víaspuramente algebraicas.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Introducción (Cont.)
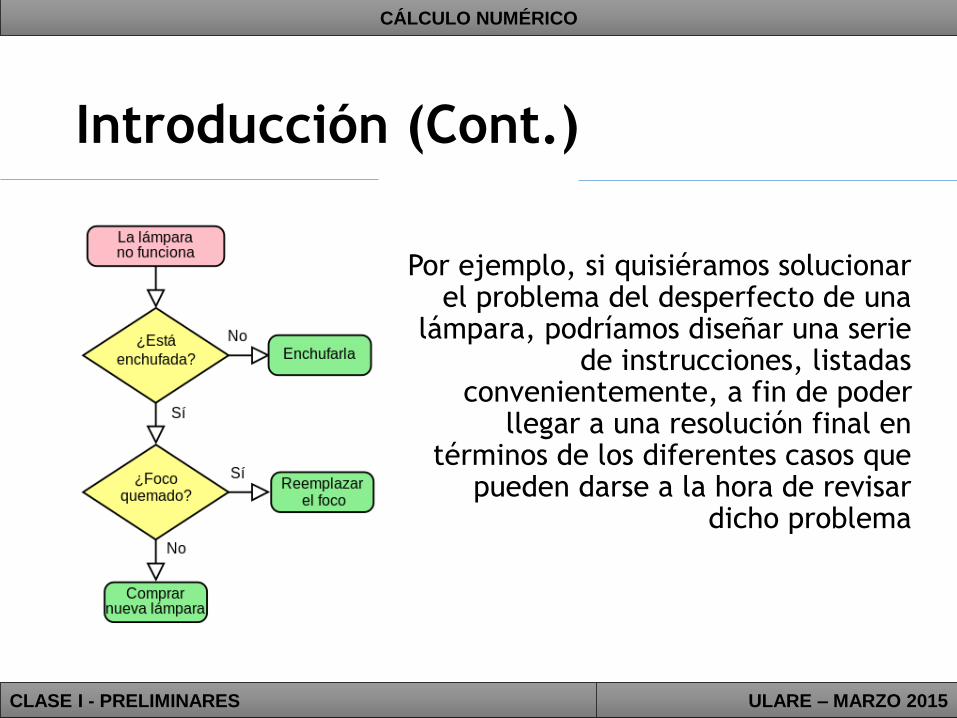
Por ejemplo, si quisiéramos solucionar el problema del desperfecto de una
lámpara, podríamos diseñar una serie de instrucciones, listadas
convenientemente, a fin de poder llegar a una resolución final en
términos de los diferentes casos que pueden darse a la hora de revisar
dicho problema
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Preliminares de Cálculo
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Límites y Continuidad
Antes de poder estudiar a fondo cualquier tema de análisisnumérico, es necesario repasar algunos conceptos previos sobrefunciones reales. Sobretodo aquellos relacionados con lacontinuidad y la existencia de estas entidades.
En primera instancia, cobra protagonismo el concepto de límite deuna función real. Una función 𝑓 definida en un conjunto Ω ⊆ 𝐼𝑅tiene límite 𝐿 cuando la variable independiente 𝑥 se acerca alvalor 𝑥0, definido por
𝐿 = lim𝑥→𝑥0𝑓 𝑥
si dado 휀 > 0 , existe un valor 𝛿 > 0 tal que 𝑓 𝑥 − 𝐿 < 휀 ↔𝑥 − 𝑥0 < 𝛿.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Límite de una Función

Límites y Continuidad (Cont.)
De forma más intuitiva, la idea de límite es la siguiente.Considerando una función 𝑓 𝑥 , definida en un intervaloabierto 𝑎, 𝑏 tal que 𝑎 < 𝑥0 < 𝑏, si 𝑥 se acerca a 𝑥0 en unvalor cuya magnitud es 𝛿 , entonces 𝑓 variará en unamagnitud 𝐿.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Límites y Continuidad (Cont.)
Sea 𝑓 una función definida en un conjunto Ω ⊆ 𝐼𝑅, y sea 𝑥0 unelemento de Ω. Diremos que 𝑓 es continua en 𝑥0, si y sólo si secumplen las siguientes condiciones:
o 𝑓 está definida en 𝑥0
o lim𝑥→𝑥0𝑓 𝑥 = 𝑓 𝑥0
De la misma forma, la función 𝑓 se dirá continua en Ω si 𝑓 escontinua para todo 𝑥 ∈ Ω.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Continuidad de una Función
Diferenciabilidad
Los conceptos de límite y continuidad son importantes, porque nospermiten determinar cuando las funciones de variable real son biencomportadas. Esto, en la mayoría de los casos, quiere decir que lasfunciones son diferenciables y tienen gráficas regulares y suaves.
En esta misma línea, sea 𝑓 una función real definida en un conjunto Ω ⊆𝐼𝑅, y sea 𝑥0 un punto de Ω. La función 𝑓 se dirá diferenciable en 𝑥0, si ellímite
lim𝑥→𝑥0
𝑓 𝑥 − 𝑓 𝑥0𝑥 − 𝑥0
existe. En este caso, denotamos el límite anterior como la derivada de 𝑓y se designa como 𝑓′(𝑥0).
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Diferenciabilidad (Cont.)
Si el límite anterior existe para todo 𝑥 ∈ Ω, se dirá que𝑓 es diferenciable en todo Ω y, por ende, 𝑓′ 𝑥denotará la derivada de la función 𝑓 en dicho intervalo.
El conjunto de todas las funciones que tienen 𝑛derivadas continuas en Ω se denota como 𝐶𝑛 Ω , y sedice que estas funciones son de clase 𝐶𝑘, con 𝑘 ≤ 𝑛, enΩ.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Teorema de Rolle
El teorema de Rolle es uno de los resultados más simples yútiles del cálculo diferencial, y nos permite demostrar laexistencia de un punto interior en un intervalo abierto parael cual una función diferenciable se anula cuando el valor dela misma en los extremos del intervalo es el mismo.
Sea 𝑓 una función de clase 𝐶1 definida en el intervaloabierto 𝑎, 𝑏 . Si 𝑓 𝑎 = 𝑓 𝑏 , entonces existe una constante𝑐 tal que 𝑎 < 𝑐 < 𝑏, para la cual 𝑓′ 𝑐 = 0
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Rolle (Cont.)
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
El teorema de Rolle nos permite determinar que una función diferenciable
en un intervalo abierto 𝑎, 𝑏 tiene pendiente nula si sus valores en los
extremos de dicho intervalo son los mismos.

Teorema del Valor Medio
El teorema del valor medio es uno de los resultados másimportantes del cálculo diferencial.
Sea 𝑓 una función real de clase 𝐶1 definida en el intervaloabierto 𝑎, 𝑏 . Entonces existe 𝑐 tal que 𝑎 < 𝑐 < 𝑏, para elcual
𝑓´ 𝑐 =𝑓 𝑏 − 𝑓 𝑎
𝑏 − 𝑎
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Teorema del Valor Medio (Cont.)
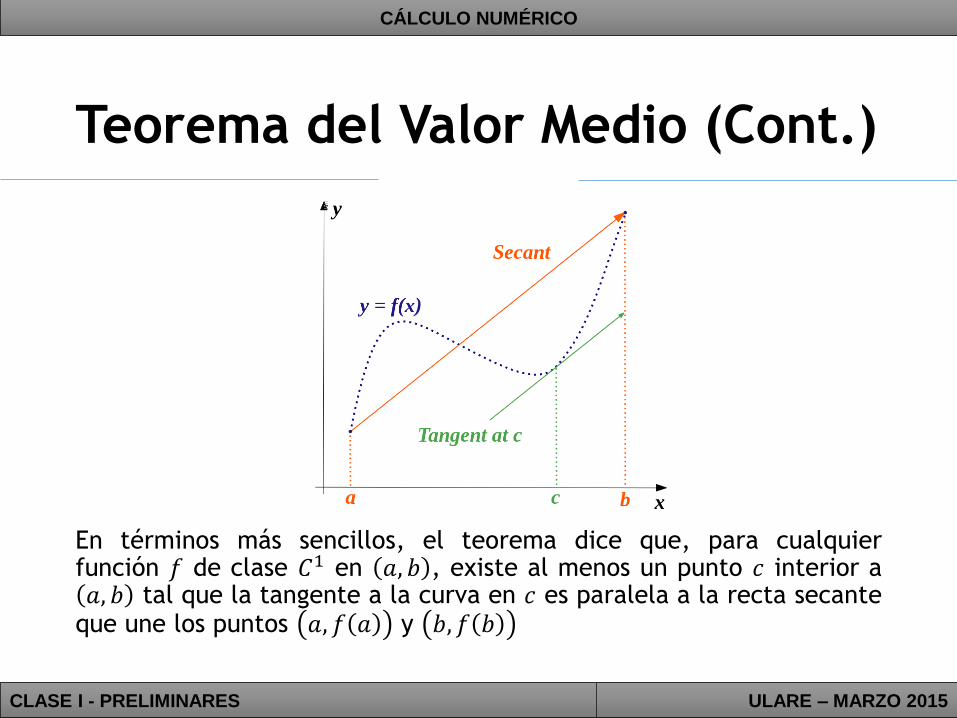
En términos más sencillos, el teorema dice que, para cualquierfunción 𝑓 de clase 𝐶1 en 𝑎, 𝑏 , existe al menos un punto 𝑐 interior a𝑎, 𝑏 tal que la tangente a la curva en 𝑐 es paralela a la recta secante
que une los puntos 𝑎, 𝑓 𝑎 y 𝑏, 𝑓 𝑏
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Taylor
El último resultado importante del cálculo diferencial querepasaremos será el relativo al Teorema de Taylor. Este teoremanos permite obtener aproximaciones polinómicas de una función enun anillo centrado en algún punto en el cual dicha función seadiferenciable. El teorema permite además obtener cotas para elerror cometido con esta aproximación.
Sea 𝑓 una función 𝑛 veces diferenciable en el intervalo cerrado𝑎, 𝑥 . Si 𝑓 es 𝑛 + 1 veces diferenciable en el intervalo abierto𝑎, 𝑥 , entonces se cumple que
𝑓 𝑥 =
𝑘=0
𝑛𝑓 𝑘 𝑎
𝑘!𝑥 − 𝑎 𝑘 + 𝑅𝑛 𝑓
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Teorema de Taylor (Cont.)
El término 𝑅𝑛 𝑓 es llamado resto de la aproximaciónpolinomial de Taylor, y está definido como
𝑅𝑛 𝑓 =𝑓 𝑛+1 𝜉
𝑛 + 1 !𝑥 − 𝑎 𝑛+1
El término 𝜉 corresponde a un número real entre 𝑎 y 𝑥.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Taylor (Cont.)
Vamos a ejemplificar la utilidad de la fórmula de Taylordeterminando una aproximación polinomial para la funciónexponencial 𝑓 𝑥 = 𝑒𝑥, la cual es sencilla de obtener.
Como 𝑓 𝑛 𝑒𝑥 = 𝑒𝑥 para todo 𝑥 en cualquier intervalo deltipo 𝑎, 𝑏 , entonces, en virtud del teorema, se tiene que laaproximación de Taylor para 𝑒𝑥 centrada en 𝑥 = 0 vienedada por:
𝑒𝑥 = 𝑒0 +𝑒0
1!𝑥 − 0 +
𝑒0
2!𝑥 − 0 2 +⋯+
𝑒0
𝑛!𝑥 − 0 𝑛
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Taylor (Cont.)
Luego tenemos,
𝑒𝑥 = 1 + 𝑥 +𝑥2
2!+𝑥3
3!…+𝑥𝑛
𝑛!
O de forma más elegante,
𝑒𝑥 =
𝑘=0
𝑛𝑥𝑘
𝑘!
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Taylor (Cont.)
Las aproximaciones de Taylor (i.e. polinomios de Taylor) sondenominadas de orden 𝑛, siendo 𝑛 el grado del polinomioutilizado para la aproximación. Por ejemplo, utilizandonuevamente a la función exponencial, la aproximación deTaylor de cuarto orden vendría siendo,
𝑒𝑥 = 1 + 𝑥 +𝑥2
2!+𝑥3
3!+𝑥4
4!
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Taylor (Cont.)
Esta aproximación puede graficarse y compararse con el gráfico dela función exponencial en una vecindad del origen, tal y como semuestra en la figura.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Teorema de Taylor (Cont.)
Lo anterior permite establecer la gran precisión que tiene elteorema de Taylor en la aproximación de funciones máscomplejas mediante polinomios, porque permite no sólo quelos polinomios tomen los mismos valores en el valor deseado,sino que además, tengan el mismo radio de curvatura endicho punto.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Preliminares de Álgebra
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Vectores
Un vector en 𝐼𝑅𝑛 es un fila de números reales ordenados dela siguiente manera
𝒂 = 𝑎1, 𝑎2, … , 𝑎𝑛
Las 𝑛 constantes 𝑎𝑖 𝑖=1𝑛 son llamadas componentes del
vector 𝒂
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Vectores (Cont.)
Los vectores cumplen con las siguientes propiedades:
1. Suma de Vectores
Sean 𝒂 y 𝒃 vectores en 𝐼𝑅𝑛. Luego tenemos
𝒂 + 𝒃 = 𝑎1 + 𝑏1, 𝑎2 + 𝑏2, … , 𝑎𝑛 + 𝑏𝑛
2. Ponderación por un escalar
Sea 𝒂 un vector en 𝐼𝑅𝑛 y sea 𝜆 una constante real (i.e. escalar). Sedefine el producto del vector 𝒂 por el escalar 𝜆 como
𝜆𝒂 = 𝜆 𝑎1, 𝑎2, … , 𝑎𝑛 = 𝜆𝑎1, 𝜆𝑎2, … , 𝜆𝑎𝑛
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Propiedades

Vectores (Cont.)
3. Producto interno
Sean 𝒂 y 𝒃 dos vectores en 𝐼𝑅𝑛 . Definimos el productointerno (i.e. producto punto o escalar) entre ambos vectorescomo
𝒂 ∙ 𝒃 = 𝑎1𝑏1 + 𝑎2𝑏2 +⋯+ 𝑎𝑛𝑏𝑛 =
𝑘=1
𝑛
𝑎𝑘𝑏𝑘
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Vectores (Cont.)
4. Norma o distancia
Sea 𝒂 un vector en 𝐼𝑅𝑛 . Definimos la norma (i.e. valorabsoluto o magnitud) del vector 𝒂 como
||𝒂|| = 𝑎12 + 𝑎2
2 +⋯+ 𝑎𝑛2 =
𝑘=1
𝑛
𝑎𝑘2
12
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Matrices
Una ordenación de números dispuestos en filas y columnasde manera rectangular es llamada matriz. Si la matriz tiene𝑚 filas y 𝑛 columnas, diremos que la dimensión de dichasmatriz es de 𝑚 × 𝑛, y la escribimos como sigue
𝐴 = 𝑎𝑖𝑗 =
𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
… 𝑎1𝑚… 𝑎2𝑚… 𝑎3𝑚
⋮ ⋮ ⋮𝑎𝑛1 𝑎𝑛2 𝑎𝑛3
⋱ ⋮… 𝑎𝑚𝑛
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Matrices (Cont.)
El conjunto de todas las matrices cuya dimensión es 𝑚 × 𝑛 sedenomina 𝕄𝑚×𝑛. Los valores 𝑎𝑖𝑗 son llamados elementos dela matriz, con 1 ≤ 𝑖 ≤ 𝑚 y 1 ≤ 𝑗 ≤ 𝑛.
Cuando la matriz 𝐴 ∈ 𝕄𝑚×𝑛 tiene el mismo número de filasque de columnas, digamos 𝑛 filas y 𝑛 columnas, decimos quela matriz 𝐴 es una matriz cuadrada de orden 𝒏. En estecaso, los elementos 𝑎𝑖𝑗 para los cuales 𝑖 = 𝑗 forman lallamada diagonal principal de la matriz. La suma de dichoselementos es llamada traza de la matriz.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Propiedades y Carácterísticasde las Matrices
La condición necesaria y suficiente para que la matriz 𝐴 =𝑎𝑖𝑗 y 𝐵 = 𝑏𝑖𝑗 sean iguales (i.e. 𝐴 = 𝐵), es que tengan la
misma dimensión y, además, que cada uno de los elementosde una de ellas sea igual al respectivo elemento de la otra.Es decir,
𝑎𝑖𝑗 = 𝑏𝑖𝑗 ; ∀ 𝑖, 𝑗 | 1 ≤ 𝑖 ≤ 𝑚 ∧ 1 ≤ 𝑗 ≤ 𝑛
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Igualdad de Matrices
Propiedades y Carácterísticasde las Matrices (Cont.)
Una matriz que tenga nulos todos sus elementos es llamadamatriz nula. En términos matemáticos
𝐴 = 𝑂 ↔ 𝑎𝑖𝑗 = 0 ; ∀ 𝑖, 𝑗 | 1 ≤ 𝑖 ≤ 𝑚 ∧ 1 ≤ 𝑗 ≤ 𝑛
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Matriz Nula

Propiedades y Carácterísticasde las Matrices (Cont.)
Sean 𝐴 = 𝑎𝑖𝑗 y 𝐵 = 𝑏𝑖𝑗 dos matrices de dimensión 𝑚 × 𝑛.La suma (o diferencia) de ambas, 𝐴 ± 𝐵, es otra matriz 𝐶 =𝑐𝑖𝑗 de dimensión 𝑚 × 𝑛, en la que cada elemento de 𝐶 es
la suma de los correspondientes elementos de 𝐴 y 𝐵. Esdecir,
𝐴 ± 𝐵 = 𝑎𝑖𝑗 ± 𝑏𝑖𝑗
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Suma de Matrices
Propiedades y Carácterísticasde las Matrices (Cont.)
Sean 𝐴 = 𝑎𝑖𝑗 y 𝐵 = 𝑏𝑖𝑗 dos matrices tales que el número decolumnas de 𝐴 es igual al número de filas de 𝐵, digamos, 𝐴 ∈𝕄𝑚×𝑝 y 𝐵 ∈ 𝕄𝑝×𝑛 (i.e. ambas matrices son confirmes para lamultiplicación). El producto de ambas matrices 𝐴𝐵, en este orden,es otra matriz D = 𝑑𝑖𝑗 ∈ 𝕄𝑚×𝑛 definida por la fórmula
𝑑𝑖𝑗 = 𝑎𝑖1𝑏1𝑗 + 𝑎𝑖2𝑏2𝑗 +⋯+ 𝑎𝑖𝑝𝑏𝑝𝑗
Dicho de otra forma,
𝑑𝑖𝑗 =
𝑘=1
𝑝
𝑎𝑖𝑘𝑏𝑘𝑗 ; 1 ≤ 𝑖 ≤ 𝑚 ∧ 1 ≤ 𝑗 ≤ 𝑛
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Multiplicación de Matrices

Propiedades y Carácterísticasde las Matrices (Cont.)Por ejemplo, sean 𝐴 y 𝐵 las siguientes matrices
𝐴 =
𝑎11 𝑎12𝑎21 𝑎22𝑎31 𝑎32
; 𝐵 =𝑏11 𝑏12𝑏21 𝑏22
El producto 𝐴𝐵 de ambas matrices sería entonces
𝐴𝐵 =
𝑎11𝑏11 + 𝑎12𝑏21 𝑎11𝑏12 + 𝑎12𝑏22𝑎21𝑏11 + 𝑎22𝑏21 𝑎21𝑏12 + 𝑎22𝑏22𝑎31𝑏11 + 𝑎32𝑏21 𝑎31𝑏12 + 𝑎32𝑏22
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Propiedades y Carácterísticasde las Matrices (Cont.)Suponiendo que 𝐴, 𝐵 y 𝐶 son matrices conformes para lamultiplicación, tenemos las siguientes propiedades:
a) Distributividad siniestral: 𝐴 𝐵 + 𝐶 = 𝐴𝐵 + 𝐴𝐶
b) Distributividad dextral: 𝐴 + 𝐵 𝐶 = 𝐴𝐶 + 𝐵𝐶
c) Asociatividad: 𝐴 𝐵𝐶 = 𝐴𝐵 𝐶
d) No conmutatividad: En general, 𝐴𝐵 ≠ 𝐵𝐴
e) Elemento absorbente: 𝐴𝐵 = 𝑂 ↔ 𝐴 = 𝑂 ∨ 𝐵 = 𝑂
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Propiedades y Carácterísticasde las Matrices (Cont.)
Una matriz cuadrada 𝐴 cuyos elementos 𝑎𝑖𝑗 = 0 para 𝑖 ≥ 𝑗,es llamada matriz triangular superior. Por el contrario, si 𝐴es una matriz cuyos elementos 𝑎𝑖𝑗 = 0 para 𝑖 ≤ 𝑗, entonces 𝐴es llamada matriz triangular inferior. Por último, si lamatriz 𝐴 es tal que 𝑎𝑖𝑗 = 0 para todo 𝑖 ≠ 𝑗, entonces 𝐴 esuna matriz diagonal.
Si 𝐴 es una matriz diagonal tal que sus elementos 𝑎𝑖𝑗 = 1para todo 𝑖 = 𝑗, entonces dicha matriz es llamada matrizidentidad (i.e. matriz unidad), y se denota como 𝐼𝑛, siendo 𝑛el orden de esta matriz.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Matriz Identidad
Propiedades y Carácterísticasde las Matrices (Cont.)Siendo así, la matriz identidad puede escribirse como:
𝑎𝑖𝑗 =
1 0 00 1 00 0 1
… 0… 0… 0
⋮ ⋮ ⋮0 0 0
⋱ ⋮… 1
Si 𝐴 y 𝐵 son dos matrices tales que 𝐴𝐵 = 𝐼𝑛, entonces 𝐵 esllamada inversa de 𝐴, y se denota como 𝐴−1.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Propiedades y Carácterísticasde las Matrices (Cont.)
La transpuesta de una matriz 𝐴 de orden 𝑚 × 𝑛 es otra matriz, quedenotamos por 𝐴𝑡, tal que 𝑏𝑖𝑗 = 𝑎𝑗𝑖.
La transposición de matrices tiene las siguientes propiedades:
- 𝐴𝑡 𝑡 = 𝐴
- 𝑘𝐴 𝑡 = 𝑘𝐴𝑡, donde 𝑘 es un escalar.
- 𝐴 + 𝐵 𝑡 = 𝐴𝑡 + 𝐵𝑡
- 𝐴𝐵 𝑡 = 𝐵𝑡𝐴𝑡
- Si 𝐴 = 𝐴𝑡, entonces la matriz 𝐴 se dirá simétrica.
- Si −𝐴 = 𝐴𝑡, entonces la matriz 𝐴 se dirá antisimétrica.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Matriz Transpuesta

Determinantes
Sea 𝐴 una matriz cuadrada de orden 𝑛. Definimos la funcióndeterminante de la matriz 𝐴, que denotamos como det 𝐴 ,como una aplicación tal que
det 𝐴 :𝕄𝑚×𝑝 → 𝐼𝑅 | 𝐴 → det 𝐴
El valor del determinante puede calcularse dependiendo delorden de la matriz en cuestión. Por ejemplo, si 𝐴 = 𝑎𝑖𝑗 escuadrada de orden 2, se tendrá que
det 𝐴 = det𝑎11 𝑎12𝑎21 𝑎22
=𝑎11 𝑎12𝑎21 𝑎22
=𝑎11𝑎22 − 𝑎21𝑎12
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Determinantes (Cont.)
Para órdenes superiores seguimos el siguiente procedimiento: Sea𝐴 una matriz cuadrada de orden 𝑛 . Llamamos menorcomplementario del determinante det 𝐴 al determinante 𝑀𝑖𝑗 deorden 𝑛 − 1 que resulta al suprimir en 𝐴 todos los elementos dela fila 𝑖 y de la columna 𝑗. El menor complementario asociado designo −1 𝑖+𝑗 es llamado cofactor del elemento 𝑎𝑖𝑗, y se denotacomo 𝐴𝑖𝑗.
Definimos entonces el determinante de la matriz 𝐴, denotadocomo det 𝐴 , al número real definido por la fórmula:
det 𝐴 =
𝑗=1
𝑛
𝑎𝑖𝑗𝐴𝑖𝑗
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Determinantes (Cont.)
Sea 𝐴 una matriz cuadrada de orden 𝑛, y sea 𝐴𝑖𝑗 el cofactordel elemento 𝑎𝑖𝑗 en la matriz 𝐴 . Definimos la matrizadjunta de 𝐴 (i.e. la adjunta de la matriz 𝐴) como
adj 𝐴 = 𝐴𝑖𝑗𝑡 = −1 𝑖+𝑗𝑀𝑖𝑗
𝑡
Luego, la matriz inversa de 𝐴, que denotamos como 𝐴−1,puede formularse como
𝐴−1 =adj 𝐴
det 𝐴
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Matriz Adjunta

Determinantes (Cont.)
Sea 𝐴 una matriz cuadrada de orden 𝑛. Diremos que 𝐴 esdefinida positiva si y sólo si det 𝐴𝑘 > 0, donde 𝐴𝑘 es unasubmatriz de 𝐴 definida como
𝐴𝑘 =
𝑎11 𝑎12𝑎21 𝑎22
… 𝑎1𝑘… 𝑎2𝑘
⋮ ⋮𝑎𝑘1 𝑎𝑘2
⋱ ⋮… 𝑎𝑘𝑘
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015
Matriz definida positiva
Determinantes (Cont.)
Por ejemplo, sea 𝐴 la siguiente matriz
𝐴𝑘 =4 2 1−1 5 21 1 7
es definida positiva. En efecto, la submatriz 𝐴1
𝐴1 = 4
tiene determinante positivo, det 𝐴1 = 4.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

Determinantes (Cont.)
La submatriz 𝐴2
𝐴2 =4 2−1 5
también tiene determinante positivo, det 𝐴2 = 22. Finalmente, lasubmatriz 𝐴3 (que naturalmente es la matriz original)
𝐴3 =4 2 1−1 5 21 1 7
También tiene determinante positivo, det 𝐴3 = 144 . Luego, lamatriz 𝐴 es definida positiva.
CÁLCULO NUMÉRICO
CLASE I - PRELIMINARES ULARE – MARZO 2015

CLASE 1Preliminares
UNIVERSIDAD DE LA REPÚBLICAINGENIERÍA CIVIL DE MINASCÁLCULO NUMÉRICO
DOCENTE:Felipe Quezada Castañeda