Cinematica de Cuepos Rígidos
22
UNIDAD 2. CINEMÁTICA DE CUERPOS RÍGIDOS 14/09/20 14
-
Upload
job-justo-jose -
Category
Documents
-
view
33 -
download
0
description
cinematica de cuerpos rigidos
Transcript of Cinematica de Cuepos Rígidos

UNIDAD 2. CINEMÁTICA DE
CUERPOS RÍGIDOS
14/09/2014

CONTENIDO:
2.1 INTRODUCCIÓN2.2 TRASLACIÓN2.3 ROTACIÓN CON RESPECTO A UN EJE FIJO 2.4 MOVIMIENTO GENERAL EN EL PLANO
14/10/2014

Objetivos:• Clasificar los diferentes tipos de movimiento
plano de un cuerpo.
• Estudiar el movimiento de traslación de un cuerpo rígido y mostrar como se realiza el movimiento a través de un eje fijo.
• Estudiar el movimiento plano usando un análisis de movimiento absoluto.
• Proporcionar un análisis de movimiento relativo de velocidad y aceleración.
14/10/2014

introducción
Se considera la cinemática de cuerpos rígidos. Se investigan las relaciones existentes entre el tiempo, las posiciones, las velocidades y las aceleraciones de las diferentes partículas que forman un cuerpo rígido. Como se verá, los diferentes tipos de movimiento de cuerpo rígido pueden agruparse de manera conveniente en la forma que sigue:
• La cinemática de cuerpos rígidos estudia las relaciones existentes entre el tiempo, posición, velocidad, y aceleración de las diferentes partículas que forman un cuerpo rígido.
• Los varios tipos de movimientos de los cuerpos rígidos pueden ser puestos en cinco categorías: traslación, rotación alrededor de un eje fijo, movimiento plano general, movimiento alrededor de un punto fijo y movimiento general.
14/10/2014

TRASLACIÓN. Se afirma que un movimiento será de traslación si toda línea recta dentro del cuerpo mantiene la misma dirección durante el movimiento. También puede observarse que en la traslación todas las partículas que constituyen el cuerpo se mueven a lo largo de trayectorias paralelas. Si estas trayectorias son líneas rectas, se afirma que el movimiento es una traslación rectilínea; si las trayectorias son líneas curvas, el movimiento es una traslación curvilínea.

Considere un cuerpo rígido en traslación (ya sea rectilínea o curvilínea), y deje que A y B sean cualesquiera dos de sus partículas.
Al denotar, respectivamente, por los vectores de posición de A y B con respecto a un sistema de referencia fijo y mediante al vector que une a A y B, tenemos :

Se diferencia esta relación con respecto a t. Hay que resaltar que de la definición pura de traslación, el vector debe mantener una dirección constante; su magnitud también debe ser constante, ya que A y B pertenecen al mismo cuerpo rígido. De tal modo, la derivada de es cero y se tiene:
=
Al diferenciar una vez más, se escribe:

En consecuencia, cuando un cuerpo rígido está en traslación, todos los puntos del cuerpo tienen la misma velocidad y la misma aceleración en cualquier instante dado. En el caso de traslación curvilínea, la velocidad y la aceleración cambian en dirección, así como en magnitud, en cada instante. En el caso de traslación rectilínea, todas las partículas del cuerpo se mueven a lo largo de líneas rectas paralelas, y su velocidad y aceleración se mantienen en la misma dirección durante el movimiento completo.

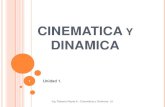
ROTACIÓN ALREDEDOR DE UN EJE FIJO. En este movimiento, las partículas que forman al cuerpo rígido se mueven en planos paralelos a lo largo de círculos centrados sobre el mismo eje fijo. Si este eje, llamado eje de rotación, interseca al cuerpo rígido, las partículas localizadas sobre el eje tienen velocidad cero y aceleración cero. La rotación no debe confundirse con ciertos tipos de traslación curvilínea. Por ejemplo, la placa que se muestra en la figura a) es una traslación curvilínea, con todas sus partículas moviéndose a lo largo de círculos paralelos, mientras que la placa que se muestra en la figura b) está en rotación, con todas sus partículas moviéndose a lo largo de círculos concéntricos.

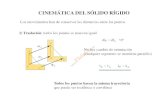
Considere un cuerpo rígido que gira alrededor de un eje fijo AA’. Sea P un punto del cuerpo y r su vector de posición con respecto a un sistema de referencia fijo. Por conveniencia, se supone que el sistema de referencia está centrado en el punto O sobre AA’ y que el eje z coincide con AA’ . Sea B la proyección de P sobre AA’ puesto que P debe permanecer a una distancia constante de B, describirá un círculo de centro B y de radio r sen Φ, donde Φ denota el ángulo formado por r y AA’.

La posición de P y del cuerpo completo está definida totalmente por el ángulo θ que forma la línea BP con el plano zx. El plano θ se conoce como coordenada angular del cuerpo y se define como positiva cuando se ve en sentido contrario al de las manecillas del reloj desde A’. La coordenada angular se expresará en radianes (rad) o, en ocasiones, en grados (°) o revoluciones (rev). Recuérdese que:
1 rev = 2π rad = 360°

la velocidad v de P es un vector perpendicular al plano que contiene a AA’ y r, y de magnitud v definida . Pero éste es precisamente el resultado que se obtendría al dibujar un vector ω=θk a lo largo de AA’ y se formara el producto vectorial ω x r Entonces se escribe:
= ω x r

El vector
que está dirigido a lo largo del eje de rotación se denomina la velocidad angular del cuerpo y es igual en magnitud a la razón de cambio θ de la coordenada angular; su sentido puede obtenerse mediante la regla de la mano derecha con base en el sentido de rotación del cuerpo. La aceleración a de la partícula P se determinará a continuación.Al diferenciar = ω x r , y recordar la regla de diferenciación de un producto vectorial, se escribe:
El vector dω/dt se denota mediante α y se denomina aceleración angulardel cuerpo. Al sustituir también v , se tiene:

Con frecuencia se encuentran dos casos particulares de rotación:
Rotación uniforme. Este caso se caracteriza por el hecho de que la aceleración angular es cero. Consecuentemente, la aceleración angular es constante, y la coordenada angular está dada por la fórmula
Rotación acelerada uniformemente. En este caso, la aceleración angular es constante. La similitud entre las fórmulas derivadas aquí y aquellas obtenidas para el movimiento rectilíneo uniformemente acelerado de una partícula es manifiesta.

Si el rollo inferior tiene una velocidad angular constante, la rapidez con la que el papel está siendo enrollado se incrementa conforme el radio aumenta.




Movimiento plano general. Hay muchos otros tipos de movimiento plano, esto es, movimientos en los cuales todas las partículas del cuerpo se mueven en planos paralelos. Cualquier movimiento plano que no es ni una rotación ni una traslación se conoce como un movimiento plano general.

Considere, por ejemplo, una rueda que gira sobre una pista recta a lo largo de cierto intervalo, dos puntos dados A y B se habrán movido, respectivamente, desde A1 hasta A2 y desde B 1 hasta B 2. El mismo resultado podría obtenerse mediante una traslación que llevaría a A y a B hacia A2 y B’1 (la línea AB se mantiene vertical), seguida por una rotación alrededor de A que llevaría a B a B 2. Aunque el movimiento de giro original difiere de la combinación de traslación y rotación cuando estos movimientos se toman en forma sucesiva, el movimiento original puede duplicarse de manera exacta mediante una combinación de traslación y rotación simultáneas.

Otro ejemplo de movimiento plano la cual representa una varilla cuyos extremos se deslizan a lo largo de una pista horizontal y una vertical, respectivamente. Este movimiento puede sustituirse por una traslación en una dirección horizontal y unarotación alrededor de A o por una traslación en una direcciónvertical y una rotación alrededor de B.

Movimiento alrededor de un punto fijo. El movimiento tridimensional de un cuerpo rígido unido a un punto fijo O, por ejemplo, el movimiento de un trompo sobre un piso rugoso se conoce como movimiento alrededor de un punto fijo. Movimiento general. Cualquier movimiento de un cuerpo rígido que no entra en ninguna de las categorías anteriores se conoce como movimiento general.