
CARRERA DE INGENIERÍA EN ELECTRÓNICA E...
191
CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE GRADO PARA LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN “DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CONTROL Y SEGURIDAD BASADO EN UNA RED INALÁMBRICA Y MICROCONTROLADORES PARA PUENTES GRÚA EN NOVACERO S.A. PLANTA LASSO” DIEGO FERNANDO PANCHI PAREDES LATACUNGA – ECUADOR 2009
Transcript of CARRERA DE INGENIERÍA EN ELECTRÓNICA E...

CARRERA DE INGENIERÍA EN ELECTRÓNICA E INSTRUMENTACIÓN
PROYECTO DE GRADO PARA LA OBTENCIÓN DEL
TÍTULO DE INGENIERO EN ELECTRÓNICA E
INSTRUMENTACIÓN
“DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CONTROL Y SEGURIDAD
BASADO EN UNA RED INALÁMBRICA Y MICROCONTROLADORES PARA
PUENTES GRÚA EN NOVACERO S.A. PLANTA LASSO”
DIEGO FERNANDO PANCHI PAREDES
LATACUNGA – ECUADOR
2009

ii
CERTIFICACIÓN
Certificamos que el presente proyecto de grado fue desarrollado en su totalidad por el
señor DIEGO FERNANDO PANCHI PAREDES, previo a la obtención de su Título de
Ingeniero en Electrónica e Instrumentación.
______________________
Ing. Amparo Meythaler N.
Director del Proyecto
______________________
Ing. Galo Ávila R.
Codirector del Proyecto
iii
AGRADECIMIENTO
Mi agradecimiento muy especial primeramente a Dios por llenarme de sus
bendiciones y sabiduría y por haber permitido que culmine mi vida universitaria
con éxito.
A mis queridos padres, hermanos y tíos por compartir conmigo los buenos y
malos momentos, por su esfuerzo demostrado durante todo este tiempo y por
brindarme su incondicional cariño y comprensión.
A la empresa Novacero Planta Lasso, por brindarme la oportunidad de desarrollar
mí proyecto de tesis, en especial al Ing. Guillermo Miño en calidad de Gerente
General y al Ing. Fernando Mera que con su experiencia y conocimientos
brindados permitieron la culminación de éste proyecto.
A la ESPE-L y sus maestros por ser de gran ayuda para lograr mi formación
personal y profesional.
Diego Fernando

iv
DEDICATORIA
Dedico éste proyecto a toda mi familia quienes de una u otra manera han estado
junto a mí en los buenos y malos momentos brindándome su cariño, comprensión
y consejos para seguir adelante, dándome fuerzas cuando parecían terminarse
las mías para seguir en el camino correcto.
Gracias a todos ellos y especialmente a mis padres por darme la oportunidad de
existir, por ser un ejemplo de superación para mí y mis hermanos, por su
comprensión, confianza y sobre todo por el gran sacrificio demostrado durante
gran parte de su vida para conseguir mi formación profesional.
Para ustedes queridos padres dedico mi tesis quienes día a día me fueron
enseñando a no darme por vencido ante las dificultades, a ser una persona de
provecho, a ustedes que nunca podré pagarles todo el sacrificio que hicieron por
mí ni aún con todas las riquezas del mundo, para ustedes con todo cariño y
respeto.
Diego Fernando

v
INTRODUCCIÓN
La comunicación inalámbrica ha tenido un auge extraordinario en los últimos años
a nivel industrial y proporciona beneficios de conectividad sin la necesidad de
estar ligadas a una ubicación específica o unida mediante cables que en muchos
casos pueden resultar muy costosos o difíciles de instalar, por lo que es
justificable la implementación de estos equipos de comunicación.
Por estas razones la comunicación inalámbrica ha tomado un papel importante
dentro de la automatización de procesos industriales ya que en la actualidad
muchas empresas están automatizando gran parte de sus procesos y una de
estas alternativas para mejorar es la tecnología inalámbrica.
Por tal motivo la empresa Novacero S.A. Planta Lasso con el fin de seguir
mejorando y modernizando cada uno de sus procesos ha decidido implementar
un sistema de control inalámbrico para el manejo de sus puentes grúa cuyo
objetivo es el diseñar e implementar un sistema de control y seguridad basado en
una red inalámbrica y microcontroladores para el manejo de dichos puentes.
Para el efecto el proyecto se ha dividido en cuatro capítulos, como sigue:
En el Capítulo I se detalla todo el marco teórico correspondiente a la
manipulación, elementos principales de seguridad y mantenimientos de los
puentes grúa, así como reglas de seguridad y equipos de protección para los
operadores, también se detalla las características más importantes del
microcontrolador y módulos de comunicación que van a ser utilizados en la
implementación del proyecto.

vi
En el Capítulo II se presenta todo lo referente a la parte de análisis y diseño de
software así como la selección de componentes y tecnología inalámbrica que van
a ser utilizadas.
En el Capítulo III se detallan los resultados obtenidos y las pruebas
experimentales a las que fueron sometidos los módulos de comunicación, los
sistemas de control y seguridad del puente para ratificar su óptimo
funcionamiento.
Finalmente, en el Capítulo IV se exponen las conclusiones y recomendaciones
recopiladas durante el desarrollo del proyecto, las mismas que podrán aportar con
futuros trabajos relacionados con el tema.
Se incluyen también la bibliografía, los enlaces y el manual de usuario
desarrollado.

vii
CONTENIDO
INTRODUCCIÓN
Pag.
CAPÍTULO I.- FUNDAMENTOS
1.1 DESCRIPCIÓN DEL PROBLEMA…………………………………. 1
1.2 DESCRIPCIÓN Y MANIPULACIÓN DE LOS…………………….. 2
PUENTES GRÚA
1.2.1 Descripción del puente grúa…………………………………… ……. 2
1.2.2 Componentes de un puente grúa…………………………………… 3
1.2.3 Movimientos de un puente grúa…………………………………...... 4
1.2.4 Características de los puentes grúa………………………………… 5
1.2.5 Tipos de mando de puentes grúa …………………………………… 8
1.2.5.1 Mando desde el suelo……………………………………………. 8
1.2.5.2 Mando desde la cabina………………………………………….. 9
1.2.6 Manipulación de puentes grúa……………………………………… 11

viii
1.3 ELEMENTOS PRINCIPALES DE SEGURIDAD Y
MANTENIMIENTO DE LOS PUENTES GRÚA…………………. 14
1.3.1 Limitadores de carga……………………………………………….. 14
1.3.1.1 Limitador de carga electrónico……………………………………. 15
1.3.1.2 Limitador de carga tensiométrico………………………………… 15
1.3.2 Finales de carrera………………………………………………….. 16
1.3.3 Dinamómetros………………………………………………………. 17
1.3.4 Mantenimiento del puente grúa…………………………………… 17
1.3.4.1 Normas generales de mantenimiento de los puentes grúa…. 17
1.3.4.2 Mantenimiento mecánico……………………………………….. 18
1.3.4.3 Mantenimiento eléctrico………………………………………… 19
1.4 REGLAS DE SEGURIDAD Y EQUIPOS DE PROTECCIÓN…... 22
1.4.1 Normas generales…………………………………………………… 22
1.4.2 Reglas de seguridad para aparejos de izar………………………. 25
1.4.3 Equipos de protección individual …………………………………. 26
1.5 COMUNICACIÓN INALÁMBRICA………………………………… 28

ix
1.5.1 Introducción…………………………………………………………. 28
1.5.2 Redes de radiofrecuencia…………………………………………. 30
1.5.3 Tecnologías de acceso inalámbrico……………………………… 30
1.5.3.1 IrDa………………………………………………………………. 31
1.5.3.2 Bluetooth – 802.15.1…………………………………………….. 32
1.5.4 ZigBee - 802.15.4……………………………………………………. 33
1.5.4.1 Configuración de los módulos XBee-Pro………………………. 41
1.5.4.2 Direccionamiento de los módulos………………………………. 46
1.5.5 Estándar IEEE 802.15.4 para comunicación inalámbrica………. 48
1.5.6 Aplicaciones de la tecnología inalámbrica………………………… 49
1.6 INTRODUCCIÓN A LOS MICROCONTROLADORES…………… 50
1.6.1 Características generales de los microcontroladores ……………. 50
1.6.2 Componentes de un microcontrolador……………………………… 51
1.6.3 Aplicaciones de los microcontroladores…………………………… 52
1.6.4 Características……………………………………………………….. 54
1.7 COMUNICACIÓN SERIAL…………………………………………. 55

x
1.7.1 Introducción………………………………………………………….. 55
1.7.2 Líneas o canales de comunicación………………………………. 56
1.7.3 La transmisión síncrona……………………………………………. 57
1.7.4 La transmisión asíncrona………………………………………….. 59
1.7.5 Detección de errores en la comunicación………………………… 62
CAPÍTULO II.- ANÁLISIS Y DISEÑO
2.1 ESPECIFICACIÓN DE REQUISITOS DEL SISTEMA
DE CONTROL ………………………………………………………….. 64
2.1.1 Diagrama de bloques………………………………………………. 65
2.2 ESTUDIO Y SELECCIÓN DE TECNOLOGÍA Y COMPONENTES
A IMPLEMENTAR……………………………………………………… 69
2.2.1 Estudio y selección de tecnología inalámbrica………………….. 70
2.2.2 Configuración en modo transparente……………………………… 72
2.2.3 Selección de componentes………………………………………… 76
2.2.4 Componentes para las seguridades del puente grúa…………… 84

xi
2.3 DISEÑO Y CONSTRUCCIÓN DEL HARDWARE
PARA EL SISTEMA DE CONTROL………………………………….. 87
2.3.1 Diseño de la red inalámbrica………………………………………... 87
2.3.1.1 Diseño del Transmisor…………………………………………….. 87
2.3.1.2 Diseño del Receptor……………………………………………….. 98
2.3.1.3 Diseño del amplificador de instrumentación……………………. 103
2.4 DISEÑO DEL SOFTWARE PARA EL SISTEMA DE CONTROL…. 106
2.4.1 Programa principal…………………………………………………….. 107
CAPÍTULO III.- RESULTADOS DE PRUEBAS EXPERIMENTALES
3.1 DESCRIPCIÓN FÍSICA DEL SISTEMA DE CONTROL …………….. 111
3.2 PRUEBAS EXPERIMENTALES……………………………………….. 112
3.2.1 Prueba de monitoreo de datos………………………………………… 113
3.2.2 Pruebas del control inalámbrico………………………………………. 115
3.2.3 Tiempo de respuesta para la activación de movimientos
y paro de emergencia…………………………………………………. 117
3.2.4 Prueba de los sensores para protección del puente grúa………… 118
xii
3.3 ANÁLISIS DE PRUEBAS EXPERIMENTALES………………………. 119
3.3.1 Análisis del monitoreo de datos……………………………………. 119
3.3.2 Análisis del funcionamiento del control inalámbrico………………. 120
3.3.3 Análisis del tiempo de respuesta para la activación de
movimientos y paro de emergencia…………………………………. 120
3.3.4 Análisis de respuesta de los sensores para el puente grúa………. 120
3.4 ALCANCES Y LIMITACIONES……………………………………….. 121
3.4.1 Alcances………………………………………………………………. 121
3.4.2 Limitaciones………………………………………………………….. 122
3.5 ANALISIS TÉCNICO – ECONÓMICO……………………………….. 122
CAPÍTULO IV.- CONCLUSIONES Y RECOMENDACIONES
4.1 CONCLUSIONES……………………………………………………….. 125
4.2 RECOMENDACIONES………………………………………………… 127
BIBLIOGRAFÍA Y ENLACES …..………………………………………… 129
ANEXOS
A) Glosario de términos

xiii
B) Hojas de especificaciones técnicas
C) Diagramas esquemáticos y placas de circuito impreso
D) Manual de usuario

1
CAPÍTULO I
FUNDAMENTOS
1.1 DESCRIPCIÓN DEL PROBLEMA
En la empresa Novacero S.A. Planta Lasso se realizó un estudio sobre el
funcionamiento de los puentes grúa1 que operan en todo el proceso de laminación
en caliente2, los mismos que permiten realizar tareas como transporte de
matricería, montaje y desmontaje de maquinaria pesada, tareas de
mantenimiento, extracción de material de reproceso, empaque de producto
terminado, etc.
La operación de estos puentes se la realiza por medio de una botonera la cual
está conectada al puente por medio de un cable de corto alcance que envía las
señales de control hacia unos motores de AC instalados en el puente los mismos
que permiten realizar los movimientos de operación del puente grúa. El operador
trabaja en una área peligrosa cuando se transporta materiales pesados ya que la
carga se encuentra a pocos metros del operador y en algunos casos éste queda
bajo la carga, quedando expuesto a sufrir accidentes por ruptura del cable
sujetador o caída de los materiales que se estén transportando lo que pondría en
riesgo su vida o la de los otros trabajadores.
1 Máquina utilizada para la elevación y transporte de materiales
2 La laminación en caliente es un método de mecanizado para crear láminas o chapas de metal a partir de
acero a temperaturas aproximadas a 1200 grados centígrados

2
Adicionalmente el sistema de control no posee los sistemas de seguridad
necesarios para su operación en forma segura como son los sensores o
limitadores de carga, los finales de carrera para cada uno de los movimientos que
realiza el puente, entre los principales.
Por lo anterior aparece la necesidad de implementar un sistema de control basado
en una comunicación inalámbrica que permita operar los puentes grúa desde una
distancia segura, y el accionar del puente sólo si la carga a levantarse está dentro
de los límites de seguridad.
Para cumplir con el objetivo, se debe realizar primeramente una revisión de los
conceptos teóricos necesarios de los elementos que intervienen en la posible
solución al problema, los cuales se revisan a continuación.
1.2 DESCRIPCIÓN Y MANIPULACIÓN DE LOS PUENTES GRÚA
1.2.1 Descripción del puente grúa
Los puentes grúa son aparatos destinados al transporte de materiales y cargas en
desplazamiento vertical y horizontal en el interior y exterior de industrias,
almacenes, etc.
Consta de uno o dos vigas móviles sobre carriles, apoyadas en columnas,
consolas, a lo largo de dos paredes opuestas del edificio rectangular. El bastidor
del puente grúa consta de dos vigas transversales en dirección a la luz de la nave
(vigas principales) y de uno o dos pares de vigas laterales (testeros),
longitudinales en dirección a la nave y que sirven de sujeción a las primeras y en

3
donde van las ruedas. Un carro automotor soporta un polipasto3 cuyo cableado de
izamiento4 se descuelga entre ambas partes de la estructura.
La combinación de movimientos de estructura y carro permite actuar sobre
cualquier punto de una superficie como se ve en la figura 1.1, estos movimientos
están delimitados por la longitud de los raíles por los que se desplazan los
testeros y por la separación entre ellos.
Figura1.1 Descripción de un Puente Grúa
1.2.2 Componentes de un puente grúa
Desde el punto de vista de seguridad se consideran tres partes importantes:
3 Es un sistema de poleas compuesto de dos grupos, uno fijo y otro móvil. Se emplea en la elevación o
movimiento de cargas siempre que queramos realizar un esfuerzo menor que el que tendríamos que hacer
levantando a pulso el objeto.
4Se utiliza para subir o levantar un objeto tirando del cabo del que está suspendido.

4
El puente.- Se desplaza a lo largo de la nave.
El carro.- Se desplaza sobre el puente y recorre el ancho de la nave.
El gancho.- Va sujeto al carro mediante el cable de acero galvanizado,
realizando los movimientos de subida y bajada de las cargas.
1.2.3 Movimientos de un puente grúa
Los tres movimientos que realiza un puente grúa son:
Translación del puente
Ejecuta un movimiento en dirección longitudinal a la nave, se realiza mediante
un motor que arrastra los rodillos por medio de semiárboles de transmisión.
Orientación del carro
Realiza un movimiento de traslación del carro a lo ancho del puente.
Elevación – Descenso
La carga es subida o bajada por efecto del motor que sujeta el gancho con la
ayuda del cable principal.

5
1.2.4 Características de los puentes grúa
Además de los aspectos indicados anteriormente, existen una serie de datos
básicos dependiendo del puente grúa.
1.2.4.1 Velocidades de traslación
Es imprescindible que exista una relación correcta entre la velocidad de
translación final y los valores de aceleración y desaceleración correspondiente
para garantizar un servicio eficaz del puente grúa, el tiempo de translación a plena
velocidad, será un 85% de la marcha total.
1.2.4.2 Motores de accionamiento
Según el tipo de empleo que vaya a tener el puente grúa, así será el tipo de motor
a utilizar en el transporte.
a) Motores de corriente continua
Se trata de equipos caros y delicados, que necesitan de mucho mantenimiento
y de equipos de regulación de velocidad (en la actualidad su existencia está
muy limitada a puentes grúa). Algunos de los motores que se utilizan en estos
casos son el shunt y el compound.

6
b) Motores de corriente alterna
Un tipo de motores de corriente alterna son los motores asíncronos o de
inducción; este motor asíncrono está formado por un rotor, que puede ser de
dos tipos: rotor bobinado y de rotor en cortocircuito o de jaula de ardilla.
c) Motor asíncrono de rotor bobinado
Es el más utilizado en la actualidad para el funcionamiento de puentes grúa,
los devanados del rotor son similares a los del estator con el que está
asociado. El número de fases del rotor no tiene porque ser el mismo que el del
estator, lo que sí tiene que ser igual es el número de polos. Los devanados del
rotor están conectados a anillos colectores montados sobre el mismo eje. En la
figura 1.2 se presenta el rotor y estator para éste tipo de motores.
Figura 1.2 Motor asíncrono de rotor bobinado
d) Motor de rotor en cortocircuito
También conocido como motor jaula de ardilla, consta de un rotor constituido
por una serie de conductores metálicos dispuestos paralelamente unos a otros
y cortocircuitados en sus extremos por unos anillos metálicos, esto es lo que
forma la llamada jaula de ardilla por su similitud gráfica con una jaula de
ardilla. Esta 'jaula' se rellena de material, normalmente chapa apilada. De ésta
manera, se consigue un sistema n-fásico de conductores (siendo n el número

7
de conductores) situado en el interior del campo magnético giratorio creado
por el estator, con lo cual se tiene un sistema físico eficaz, simple y muy
robusto (básicamente, no requiere mantenimiento). En la figura 1.3 se muestra
un motor jaula de ardilla indicando sus partes internas y en la figura 1.4 se
indica el diagrama de conexión para sus devanados en estrella y triangulo.
Figura 1.3 Motor jaula de ardilla
Figura 1.4 Conexión de los devanados

8
1.2.5 Tipos de mando de puentes grúa
Según el tipo de condiciones de servicio, la utilización del sistema de mando de
los puentes grúa pueden ser:
1.2.5.1 Mando desde el suelo
Desplazable a lo largo del puente
Permite guiar la carga manualmente y mantener una distancia de seguridad
entre el conductor y la carga.
Mando suspendido del carro
Del puente grúa se desprende un cable de corto alcance y va conectado a la
botonera para controlar los movimientos del puente como se puede apreciar
en la Figura 1.5. En este caso el conductor está próximo a la carga y puede
guiarla manualmente, es adecuado para trabajos donde no se manejen cargas
muy pesadas y no exista riego de causar accidentes al momento de trasladar
la carga.
Figura 1.5. Mando suspendido del carro

9
Mando por radio
Se utiliza cuando el conductor no pueda acompañar al puente grúa, cuando el
lugar de operación es inaccesible para el operador o cuando se manejen
cargas muy elevadas que pueden causar la rotura del cable y por ende
accidentes, en la figura 1.6 se ve un tipo de radio mandos para el manejo de
puentes grúa.
Figura 1.6 Mando por radio
1.2.5.2 Mando desde la cabina
Cabina montada en el centro del puente
Este sistema se utiliza para puentes grúa de gran luz, con el objeto de
conseguir una buena visibilidad para el conductor, en la figura 1.7 se muestra
la silla y demás componentes que irán instalados en la cabina de control.

10
Figura 1.7 Mando desde la cabina
Cabina desplazable a lo largo del puente
La figura 1.8 indica una cabina empleada en el transporte de material muy
voluminoso y donde el trabajo del puente grúa requiere que al trasladar la
carga se maneje con precisión.
Figura 1.8 Grúa Desplazable a lo largo del puente

11
1.2.6 Manipulación de puentes grúa
A continuación se indica las normas fundamentales para llevar a cabo una
manipulación segura de los puentes grúa para evitar posibles accidentes
ocasionados por un manejo incorrecto o imprudencia del operador.
Antes de elevar la carga, realizar una pequeña elevación para comprobar su
estabilidad y en el caso de que la carga se encuentre inclinada descender y
realizar un eslingado que asegure una carga estable, en la figura 1.9 se
muestra la forma de elevar una carga, comprobando su estabilidad.
Figura 1.9 Elevación de cargas estables
Elevar la carga siempre con el carro y el puente alineados con la misma, tanto
horizontal como verticalmente para evitar balanceos. Como se puede observar
en la figura 1.10, la carga se debe encontrar suspendida horizontalmente para
un desplazamiento seguro.

12
Figura 1.10 Desplazamiento seguro de cargas
Como se puede observar en la figura 1.11, el operador debe acompañar
siempre a la carga para un mayor control de las distancias y observar en todo
momento la trayectoria de la misma, evitando obstáculos fijos con los que
pueda chocar.
Figura 1.11 Operador acompañando a la carga
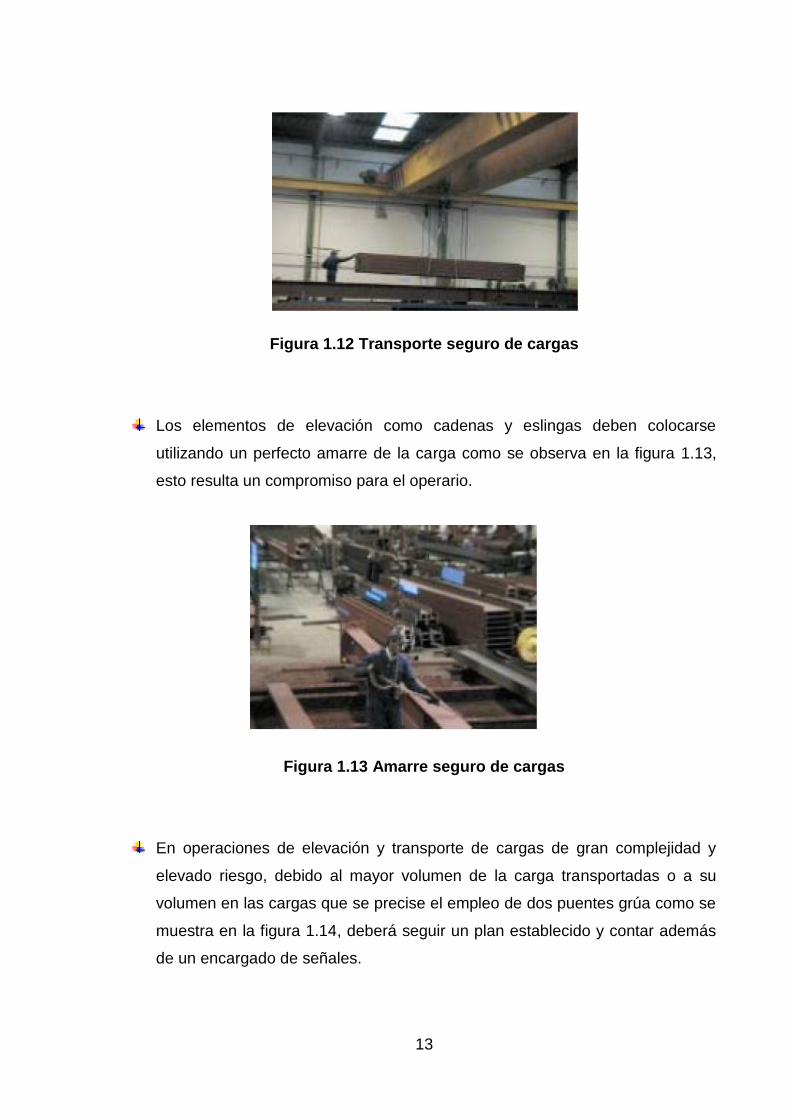
No colocarse nunca debajo de cargas que se encuentren suspendidas, y como
se ve en la figura 1.12 nunca se debe transportar cargas por encima de
trabajadores y se debe llevar siempre la carga por delante.
13
Figura 1.12 Transporte seguro de cargas
Los elementos de elevación como cadenas y eslingas deben colocarse
utilizando un perfecto amarre de la carga como se observa en la figura 1.13,
esto resulta un compromiso para el operario.
Figura 1.13 Amarre seguro de cargas
En operaciones de elevación y transporte de cargas de gran complejidad y
elevado riesgo, debido al mayor volumen de la carga transportadas o a su
volumen en las cargas que se precise el empleo de dos puentes grúa como se
muestra en la figura 1.14, deberá seguir un plan establecido y contar además
de un encargado de señales.

14
Figura 1.14 Elevación y transporte de cargas de gran volumen
1.3 ELEMENTOS PRINCIPALES DE SEGURIDAD Y
MANTENIMIENTO DE LOS PUENTES GRÚA
Los principales elementos de seguridad que deben estar presentes en los puentes
grúa son los que a continuación se describen.
1.3.1 Limitadores de carga
Son dispositivos que sirven para evitar sobre presiones en el cable y se clasifican
en:

15
1.3.1.1 Limitador de carga electrónico
Son limitadores de alta precisión y seguridad, que evitan accidentes y protegen de
averías por sobre carga el puente grúa y polipastos. Es aplicable también a
ascensores, montacargas, sistemas de tensión de cable y en general a cualquier
equipo o instalación donde se someta un cable metálico a tracción y se desee
limitar su tensión máxima, en la figura 1.15 se puede observar un ejemplo de
limitador de carga electrónico.
Figura 1.15 Limitador de carga electrónico
1.3.1.2 Limitador de carga tensiométrico
Fue diseñado para prevenir las sobrecargas que habitualmente se producen en
los aparatos de elevación como grúas, puentes grúa, montacargas, elevadores,
etc.
Evita roturas de cable, ganchos, ruedas, deformación de vigas y raíles y en
general todos los accidentes derivados de carga por encima de los límites, un
ejemplo de limitador de carga tensiométrico se ve en la figura 1.16.

16
Figura 1.16 Limitador de carga tensiométrico
1.3.2 Finales de carrera
El final de carrera o sensor de contacto (también conocido como "interruptor de
límite") es un dispositivo eléctrico, neumático o mecánico situado al final del
recorrido de un elemento móvil, como por ejemplo, una banda transportadora,
movimientos de elevación y translación, con el objetivo de enviar señales que
puedan modificar el estado de un circuito. Internamente pueden contener
interruptores normalmente abiertos (NA), cerrados (NC) o conmutadores,
dependiendo de la operación que cumplan al ser accionados, de ahí la gran
variedad de finales de carrera que existen en mercado.
Generalmente estos sensores están compuestos por dos partes: un cuerpo donde
se encuentran los contactos y una cabeza que detecta el movimiento. Su uso es
muy diverso, empleándose, en general, en todas las máquinas que tengan un
movimiento rectilíneo de ida y vuelta o sigan una trayectoria fija; es decir, aquellas
que realicen una carrera o recorrido fijo, como por ejemplo ascensores, puentes
grúa, montacargas, robots, etc.

17
1.3.3 Dinamómetros
Dispositivos que se utilizan para conocer el peso de la carga que se va a
transportar o a levantar, es usado especialmente para observar pesos de cargas
pequeñas. Un ejemplo de ello se ve en la figura 1.17.
Figura 1.17 Dinamómetros
1.3.4 Mantenimiento del puente grúa
Todas las tareas de comprobación y mantenimiento de estos equipos deben
realizarlas personal calificado y con formación suficiente. Para ello se requiere los
manuales de mantenimiento correspondientes de los equipos, ya que ofrecen la
información exacta de las necesidades de mantenimiento preventivo y posible
correctivo.
1.3.4.1 Normas generales de mantenimiento de los puentes grúa
Colocar el puente grúa en una zona que no entorpezca la marcha o el trabajo
del resto de los puentes grúa que puedan trabajar en los mismos caminos de

18
rodadura aislando el puente y zona de trabajo, tanto con medios de
señalización como con calzos y topes en las vías de rodadura.
Si no es posible desconectar el interruptor principal, se bloquearán los mandos
del puente grúa para que nadie pueda actuar sobre ellos.
Cuando se utilicen gatos hidráulicos se dispondrán tacos de seguridad que
aseguren su posición al material levantado en previsión de posibles fallas de
los gatos. Los gatos se asentarán sobre piezas de madera para evitar roces
entre metales.
Cada puente grúa llevará un libro de registro, en el que se anoten fechas,
revisión y averías.
1.3.4.2 Mantenimiento mecánico
a) Estructura
Comprobar las uniones de vigas (apriete de tornillos, control de soldaduras,
etc.).
Inspeccionar los carriles de rodadura (alineación, desgaste, fijación a vigas).
b) Testeros
Comprobar el funcionamiento de los motores.
Comprobar el desgaste de las pestañas de las ruedas.
Comprobar que no existan grietas capilares en las zonas de rodadura de las
ruedas.
Verificar los niveles de aceite y estado de grasas en los grupos reductores.

19
Comprobar el apriete de tornillos y tuercas de fijación de los distintos
elementos (motores, reductores, topes, etc.). Estado de soldaduras.
c) Carro
Engrase del cable de elevación.
Comprobar las pérdidas de aceite o grasa.
Comprobar el estado de las ruedas del carro.
Inspeccionar el cable de elevación y sus amarres.
Engrasar los dientes, rodamientos y puntos de fricción.
Verificar los niveles de aceite o estado de grasas de los reductores de
elevación y traslación.
Comprobar la regulación del limitador de carga a su máxima capacidad.
d) Gancho
Revisar que las poleas se encuentren en buen estado.
Comprobar el buen estado del gancho sujetador.
Verificar el engrase del rodamiento axial.
Comprobar el engrase de poleas.
e) Cable
No deben observarse más de 6 alambres cortados o quebrándose en una
longitud de 6 veces el diámetro del cable.
No deben observarse alambres anidados o retorcidos.

20
No debe observarse óxido.
Verificar el control de ajuste de los tornillos de fijación de los prisioneros del
cable.
Verificar la existencia de lubricación.
1.3.4.3 Mantenimiento eléctrico
Antes de efectuar cualquier trabajo de revisión, reparación o mantenimiento del
puente grúa, este deberá colocarse en un lugar adecuado que no moleste a otros
equipos, ni al resto de operarios en sus labores.
El puente grúa deberá ser desconectado de la red eléctrica y su interruptor
bloqueado para que no pueda ser puesto en marcha de forma accidental. Se
recomienda antes de realizar las tareas de mantenimiento o reparación disponer
de todos los elementos que sean necesarios para garantizar la seguridad del
personal que realiza el mantenimiento y del resto de operarios que pueden
ubicarse alrededor del puente grúa. A continuación se indica el procedimiento a
seguir para realizar las tareas de mantenimiento eléctrico.
Comprobar el estado de las cajas de conexión.
Comprobar los limitadores de fin de carrera de elevación, traslación de carro y
traslación de puente.
Revisar el estado de los elementos móviles de alimentación eléctrica.
Comprobar el estado de las escobillas y el colector de los motores.
Comprobar estado de las conexiones en general.
21
Después de haber realizado las tareas de mantenimiento y antes de que entre en
funcionamiento el puente grúa hay que tener en cuenta ciertos aspectos
importantes que a continuación se describen.
a) Controles
Hay que conectar los relés térmicos de los motores para comprobar su
correcto funcionamiento y que salten en caso de sobrecarga del motor y paren
la maniobra que se encuentre realizando en ese instante.
b) Radiomandos
Se realiza una inspección visual del estado de botoneras, manipuladores,
indicadores luminoso. En caso de encontrar piezas deterioradas
reemplazarlas.
c) Limitadores de carga y finales de carrera
Se realiza una inspección visual, donde se comprueba si están rotas las
palancas de accionamiento y se verifica si funcionan eléctricamente mediante
maniobras.
En caso de existir todos los finales de carrera accionarlos uno por uno y
verificar que produzcan el efecto deseado.
Verificar y ajustar de ser necesario, los topes fijos de accionamiento de los
finales de carrera, tanto los que se encuentran fuera de la grúa como los que
se encuentran a bordo de la misma.

22
1.4 REGLAS DE SEGURIDAD Y EQUIPOS DE PROTECCIÓN
A continuación se muestran las reglas de seguridad para los operadores y
componentes del puente grúa.
1.4.1 Normas Generales
Cualquier tipo de puente grúa sólo podrá ser manejada por operarios
autorizados y suficientemente preparados.
En ningún caso se suspenderá la máxima carga que corresponda a cada
posición de trabajo del puente grúa. Del mismo modo nunca se suspenderá la
carga máxima señalada en las especificaciones de sus elementos auxiliares
como ganchos, cable, cadenas, eslingas, etc.
Todos los movimientos de las cargas se harán lentamente evitando siempre
los movimientos bruscos.
Asegurarse que el centro de gravedad de la carga se halle en la línea central
del forjado del gancho, de manera que la carga no tuerza el cuello de este
último.
Cerciorarse de que la fuerza sea aplicada sólo en la superficie de apoyo del
gancho (el punto más bajo de éste). Si se aplican fuerzas a otras partes del
gancho se producirán tensiones indeseadas. Las fuerzas en el gancho doble
tienen que ser iguales en ambas superficies de apoyo como se puede ver en
la figura 1.18.

23
Figura 1.18 Fuerza aplicada a un gancho
Antes del izado asegúrese de que los cables son perpendiculares y que el
polipasto se encuentra colocado perpendicularmente encima de la carga que
va a izarse. Una carga no debe izarse o arrastrarse por el suelo de forma que
cause una tracción lateral en los cables como se puede observar en la figura
1.19.
Figura 1.19 Izado de cargas
No se sitúe debajo del gancho ni de la carga. No desplace el gancho ni la
carga si alguna persona se encuentra debajo de éstos. La carga no debe
elevarse nunca de tal forma que, si cayera, dañe a una persona.

24
Figura 1.20 Desplazamiento de cargas
Las cargas se desplazarán a la menor altura posible, mientras que los
movimientos sin carga se harán con el gancho elevado.
Se prohíbe elevar cargas que no se encuentren totalmente libres y nunca se
utilizará el puente grúa para arrancar objetos que se encuentren empotrados al
piso.
Se prohíbe el paso o permanencia del personal bajo cargas en suspensión.
Queda absolutamente prohibido el transporte de personas sobre cargas,
ganchos o eslingas vacías.
Es obligación del operador realizar un chequeo visual diario del puente grúa en
busca de defectos en todos sus componentes visibles (cables, ganchos,
botonera, seguros de gancho, aditamentos auxiliares: elongación de cadenas,
etc.).
Es obligación del personal que usa el puente grúa, comunicar el estado de
funcionamiento, así como cualquier anormalidad entre turnos de trabajo.
Cuando no pueda evitarse que los objetos transportados giren, se guiarán en
su desplazamiento utilizando cuerdas desde un lugar seguro.
Nunca se efectuará contramarchas, salvo en caso de emergencia.

25
Se evitará que el gancho del puente grúas se apoyen sobre el suelo u otros
objetos, para que el cable no pierda tensión.
Antes de iniciar el uso de los puentes grúa se comprobará la inexistencia de
obstáculos en su campo de acción. De existir se tomarán las medidas precisas
para limitar su movimiento e impedir posibles choques.
Cuando no se utilicen los aparatos de elevación, se tomarán las medidas
necesarias para imposibilitar que el personal no autorizado pueda emplearlos
(cabinas cerradas con llave, bloqueo de interruptores).
1.4.2 Reglas de seguridad para aparejos de izar
a) Ganchos
El factor de seguridad mínimo será cuatro para la carga nominal máxima.
Cuando se emplee para el transporte de materiales peligrosos el factor de
seguridad será cinco.
b) Cadenas
Su factor de seguridad será al menos de cinco para la carga nominal máxima,
si llevan anillos, ganchos, eslabones, argollas o cualquier otro complemento,
serán del mismo material que la cadena a la que vayan fijados. Se prohíbe los
empalmes atornillados, los eslabones desgastados o en mal estado, si se
presenta este caso deben ser cortados y reemplazados de inmediato.
c) Cables
Su factor de seguridad no será inferior a seis. Los ajustes de los ojales y lazos
para ganchos, anillos y argollas estarán provistos de guardacabos resistentes.

26
d) Cuerdas
Su factor mínimo de seguridad será diez. No se deslizará sobre superficies
ásperas o en contacto con tierra, arena o sobre ángulos o aristas cortantes,
salvo que vayan protegidos. Se desecharán las que presenten deterioros
apreciables.
1.4.3 Equipos de protección individual
Todo trabajador en forma general y sin excepción deberá utilizar el equipo de
seguridad que a continuación se describe.
El casco de seguridad.
Protectores auditivos.
Calzado de seguridad.
Guantes.
Gafas de seguridad.
Y demás epis5 según la tarea a realizar.
En la figura 1.21 se muestra la representación de los equipos de protección
individual que deberán ser utilizados.
5 EPIs=Equipo de protección individual, se entiende cualquier dispositivo o medio que vaya a llevar o del que
vaya a disponer una persona con el objetivo de que la proteja contra uno o varios riesgos que puedan
amenazar su salud y su seguridad

27
Figura 1.21 Equipos de protección individual
A más de cumplir con las normas de seguridad explicadas anteriormente es
obligación del operador del puente grúa realizar las siguientes tareas diariamente
antes de empezar sus labores:
Revisión diaria visual de elementos sometidos a esfuerzo.
Comprobación diaria de los frenos.
Observación diaria de carencia de anormalidades en el funcionamiento de la
máquina.
Comprobación del funcionamiento del pestillo de seguridad del gancho.
Formación de nudos (nidos de pájaros).
Rotura de alambres.
Deformaciones permanentes (doblados, aplastamientos, alargamientos, etc.).
Zonas aplanadas debido al desgaste.
Grietas.
Deslizamiento del cable respecto a los terminales.
Tuercas aflojadas.
Grietas, roturas, elongaciones de accesorios auxiliares.
Alambres eléctricos pelados, mal aislados, colgados.
En caso de observar algún problema o existir anomalías en el funcionamiento del
puente grúa, el operador tiene la obligación de informar inmediatamente al jefe de
turno lo que está pasando y suspender su operación para evitar posibles

28
accidentes por mal funcionamiento hasta que nuevamente el puente grúa sea
puesto en operación.
1.5 COMUNICACIÓN INALÁMBRICA 6
1.5.1 Introducción
Día con día, crece la necesidad de comunicarse por lo que cada vez se requiere
mejorar los sistemas, predecir el comportamiento de las ondas de RF, modelar el
canal de comunicación y conocer bien los factores y mecanismos que intervienen
en la propagación de la información.
Para lograr la comunicación y transmitir información se requiere un transmisor,
receptor y un canal o medio de comunicación. Existen diferentes maneras de
transmitir las ideas como puede ser: verbal, por medio de texto impreso,
imágenes, ondas acústicas y ondas electromagnéticas. Los canales de
comunicación para cada uno de ellos son el aire, el correo ya sea electrónico o en
papel, un cable y la atmosfera respectivamente.
Una consideración básica en las comunicaciones, es que no existe un canal o
medio de comunicación ideal; es decir, todos los medios de transmisión ya sean
alámbricos, inalámbricos o sonoros, presentan cierta atenuación, interferencia,
ruido, retrasos y una gran cantidad de factores que hacen que la señal transmitida
sea afectada durante todo el trayecto hasta llegar al receptor.
6 http://www.monografias.com/trabajos16/comunicacion-inalambrica/comunicacion-inalambrica.shtml

29
También se debe tomar en cuenta, que el transmisor y el receptor generalmente
se encuentran a una cierta distancia y bajo la influencia de la geografía del lugar
lo que puede ocasionar que las señales de radio frecuencia puedan desvanecerse
o bloquearse por materiales medioambientales. Los elementos que afecten
negativamente la señal inalámbrica se pueden apreciar en la tabla 1.1 por lo que
es de gran importancia analizar la manera de hacer llegar la información de
manera rápida, veraz y segura al receptor con el mínimo de atenuación posible.
Tabla 1.1 Elementos que afectan las señal de radio frecuencia
Material Ejemplo Interferencia
Madera Tabiques Baja
Vidrio Ventanas Baja
Amianto Techos Baja
Yeso Paredes interiores Baja
Ladrillo Paredes interiores y exteriores Media
Hojas Árboles y plantas Media
Agua Lluvia / niebla Alta
Cerámica Tejas Alta
Papel Rollos de papel Alta
Metal Vigas, armarios, etc. Muy alta
Sin embargo aunque las redes inalámbricas hayan aparecido para solucionar
ciertos problemas de comunicación, no quiere decir que puedan reemplazar a las
redes cableadas, ya que estas ofrecen velocidades de transmisión mayores que
las logradas con la tecnología inalámbrica.

30
1.5.2 Redes de radiofrecuencia7
Las ondas de radio son fáciles de generar, pueden viajar distancias largas y
penetrar edificios sin problemas, de modo que se utilizan mucho en la
comunicación, tanto de interiores como de exteriores. Las ondas de radio también
son omnidireccionales, ósea viajan en todas las direcciones desde la fuente, por
lo cual el transmisor y el receptor no tienen que alinearse físicamente.
Las propiedades de las ondas de radio dependen de la frecuencia. A bajas
frecuencias, las ondas de radio cruzan bien los obstáculos, pero la potencia se
reduce drásticamente con la distancia a la fuente. A frecuencias altas, las ondas
de radio tienden a viajar en línea recta y a rebotar en los obstáculos. También son
absorbidas por la lluvia. Todas las ondas de radio están sujetas a interferencia por
los motores y equipos eléctricos.
1.5.3 Tecnologías de acceso inalámbrico8
En la actualidad la utilización de estas tecnologías están encontrando un amplio
abanico de aplicaciones y son una atractiva solución capaz de competir con las
redes fijas y de resolver las necesidades de comunicación tradicionales
permitiendo además nuevos modos de comunicación flexible y no intrusiva.
La ventaja principal de su utilización es clara, la eliminación de cables, esto evita
grandes costos que suele aparejar el cableado, además de proporcionar una
mayor flexibilidad. 7 http://www.fing.edu.uy/[email protected]
8 http://spanish.bluetooth.com/Bluetooth/Technology/Works/Compare/
31
Desde el punto de vista de las frecuencias de transmisión, hay que decir que el
uso del espectro radioeléctrico está regulado y se requiere una licencia para
emitir. Sin embargo, existen ciertas bandas de frecuencia para uso Industrial,
Científico y Médico (ISM) para sistemas de baja potencia que no requieren
licencia.
Dependiendo del alcance, podemos clasificar estas tecnologías en cuatro tipos:
WPAN redes personales inalámbricas, WLAN redes locales inalámbricas, WMAN
redes metropolitanas inalámbricas y WWAN redes extensas inalámbricas.
En el desarrollo del proyecto haremos referencia a las redes personales
inalámbricas que son de corto/medio alcance, estas redes se diseñaron para la
interconexión de dispositivos en el espacio personal de un individuo, dispositivos
que se llevan o que están en un solo entorno de trabajo o del hogar. Estas
tecnologías tienen un alcance que va desde los 10 metros y que no excede
normalmente de los 100 metros, sin uso de repetidores. Entre éstas cabe
destacar las siguientes:
1.5.3.1 IrDA
Esta tecnología se encuentra en muchos ordenadores portátiles y ofrece
transferencia de datos inalámbrica punto a punto en su línea de visión, con un
alcance de aproximadamente uno o dos metros y velocidades de transferencia de
datos de hasta 4 Mbit/s. La IrDA funciona con tecnología de redes por infrarrojos.
Permite un funcionamiento continuo y bidireccional desde el punto de contacto
hasta una distancia de uno o dos metros. Existe también una versión de corto

32
alcance y baja potencia que funciona a una distancia de unos 20 cm y 30 cm
entre dispositivos de baja potencia, con un consumo de energía 10 veces menor.
Para establecer una comunicación con éxito entre los dispositivos, IrDA requiere
línea de visión directa entre los mismos. Esto puede crear situaciones
complicadas a los usuarios que intenten alinear los puertos IR de varios
dispositivos. Sin embargo, la línea de visión ofrece algunas ventajas de seguridad
básica ya que establecer la comunicación requiere un esfuerzo coordinado.
1.5.3.2 Bluetooth - 802.15.1
Esta tecnología está basada en la transmisión por radio de corto alcance en una
frecuencia disponible universalmente. Bluetooth proporciona comunicaciones
inalámbricas rápidas, fiables y seguras. Es un diseño pequeño, barato de fabricar
e instalar, lo que asegura que los fabricantes lo incluyan en todos sus dispositivos
portátiles. Con un tamaño de pocos milímetros, el módulo Bluetooth revolucionará
el mundo de las comunicaciones de voz y datos sin cables.
Bluetooth ofrece una ventaja sobre métodos basados en infrarrojos: las paredes,
los muebles, los bolsillos u otros obstáculos ya no suponen un impedimento para
las transmisiones de información. Las conexiones son instantáneas y se
mantienen incluso cuando los dispositivos no pueden verse mutuamente. El
alcance es de aproximadamente 10 metros, que se pueden ampliar hasta 100
metros. Debido a que está diseñado para transmisiones de radio de corto alcance,
apenas causará interferencias con otros dispositivos inalámbricos que se
encuentren en los alrededores.

33
Trabaja con frecuencias de 2,4 GHz, con velocidad de transferencia de datos que
está en un rango de 1-2 Mbps. Como ventajas se encuentran que la comunicación
es posible incluso en ambientes en los que existan interferencias
electromagnéticas, y está provista con mecanismos de seguridad en la
transmisión de datos. La nueva especificación de Bluetooth 2.0 permitirá
velocidades de 4, 8,12 Mbps.
1.5.4 ZigBee - 802.15.49
ZigBee es un protocolo de comunicaciones inalámbrico basado en el estándar de
comunicaciones para redes inalámbricas IEEE 802.15.4 creado por ZigBee
Alliance, una organización, teóricamente sin ánimo de lucro, de más de 200
grandes empresas (destacan Mitsubishi, Honeywell, Philips, Invensys, entre
otras), muchas de ellas fabricantes de semiconductores.
Se debe considerar también que ZigBee comunica una serie de dispositivos
haciendo que trabajen más eficientemente entre sí. Es un transmisor y un
receptor que usa baja potencia para trabajar y tiene como objetivo las
aplicaciones que requieren comunicaciones seguras con baja tasa de envío de
datos y maximización de la vida útil de sus baterías. Es ideal para conexiones con
diversos tipos de topología, lo que a su vez lo hace más seguro, barato y que no
haya ninguna dificultad a la hora de su construcción porque es muy sencilla.
Las comunicaciones ZigBee se realizan en la banda libre de 2.4GHz, realiza las
comunicaciones a través de una única frecuencia, es decir, de un canal.
Normalmente puede escogerse un canal de entre 16 posibles. El alcance
depende de la potencia de transmisión del dispositivo así como también del tipo
de antenas utilizadas (cerámicas, dipolos, etc). El alcance normal con antena
9 http://www.seccperu.org/files/ZigBee.pdf

34
dipolo en línea vista es de aproximadamente de 100m y en interiores de unos
30m. La velocidad de transmisión de datos de una red ZigBee es de hasta
250kbps. Una red ZigBee la pueden formar, teóricamente, hasta 65535 equipos,
es decir, el protocolo está preparado para poder controlar en la misma red esta
cantidad enorme de dispositivos.
El uso del protocolo ZigBee va desde reemplazar un cable por una comunicación
serial inalámbrica, hasta el desarrollo de configuraciones punto a punto,
multipunto, peer-to-peer (todos los nodos conectados entre sí) o redes complejas
de sensores. Una conexión típica se muestra en la figura 1.22, donde se observa
que cada módulo XBee posee algún tipo de sensor, el cual entrega los datos para
ser enviados a través de la red a un centro que administre la información.
Figura 1.22 Conexión típica usando módulos XBee
a) Estructura
Siguiendo el estándar del modelo de referencia O SI (Open Systems
Interconnection), en la figura 1.23 aparece la estructura de la arquitectura en
capas. Las primeras dos capas, la física y la de acceso al medio MACson
definidas por el estándar IEEE 802.15.4. Las capas superiores son definidas

35
por la Alianza ZigBee y corresponden a las capas de red y de aplicación las
cuales contienen los perfiles de uso, ajustes de seguridad y mensajería.
Figura 1.23 Pila del protocolo ZigBee
El nivel físico provee el servicio de transmisión de datos sobre el medio físico
propiamente dicho, así como la interfaz con la entidad de gestión del nivel
físico, por medio de la cual se puede acceder a todos los servicios de gestión
del nivel y que mantiene una base de datos con información de redes de área
personal relacionadas. De esta forma, el nivel físico controla el modulo de
radiofrecuencia y realiza la selección de canales apropiado por el cual se va a
transmitir los datos, pueden operar en una de tres posibles bandas de
frecuencia de uso no regulado.
868-868,8 MHz: Europa, permite un canal de comunicación (versión de
2003), extendido a tres en la revisión de 2006.
902-928 MHz: Norte América, hasta diez canales (2003) extendidos a
treinta (2006).
2400-2483,5 MHz: uso en todo el mundo, hasta dieciséis canales (2003,
2006).

36
El control de acceso al medio (MAC) transmite tramas MAC usando para ello
el canal físico, ofrece un interfaz de control y regula el acceso al canal físico.
También controla la validación de las tramas y las asociaciones entre nodos.
Por último, ofrece puntos de enganche para servicios seguros.
La función principal de la capa de red es permitir el correcto uso del subnivel
MAC y ofrecer un interfaz adecuado para su uso por parte del nivel
inmediatamente superior, a más de esto, controlar la configuración de nuevos
dispositivos y el establecimiento de nuevas redes; puede decidir si un
dispositivo vecino pertenece o no a la red e identifica nuevos routers y
dispositivos final que se encuentren dentro del área de operación de toda la
red.
La trama general de operaciones (GOF) es una capa que existe entre la de
aplicaciones y el resto de capas. La GOF suele cubrir varios elementos que
son comunes a todos los dispositivos, como el direccionamiento, los modos de
direccionamientos y la descripción de dispositivos, como el tipo de dispositivo,
potencia, modos de dormir. Utilizando un modelo, la GOF especifica métodos,
eventos, y formatos de datos que son utilizados para constituir comandos y las
respuestas a los mismos.
La capa de aplicación es el más alto definido por la especificación y por tanto
la interfaz efectiva entre el nodo ZigBee y sus usuarios. En él se ubican la
mayor parte de los componentes definidos por la especificación, tanto los
objetos de dispositivo ZigBee (ZigBee device objects, ZDO) como sus
procedimientos de control como los objetos de aplicación que se encuentran
aquí.
37
b) Tipos de Dispositivos
Se definen tres tipos distintos de dispositivo ZigBee según su papel en la red:
Coordinador ZigBee (ZigBee Coordinator, ZC): El tipo de dispositivo más
completo. Debe existir uno por red. Sus funciones son las de encargarse de
controlar la red y los caminos que deben seguir los dispositivos para
conectarse entre ellos, requiere memoria y capacidad de computación.
Router ZigBee (ZigBee Router, ZR): Interconecta dispositivos separados en
la topología de la red, además de ofrecer un nivel de aplicación para la
ejecución de código de usuario.
Dispositivo final (ZigBee End Device, ZED): Posee la funcionalidad
necesaria para comunicarse con su nodo padre (el coordinador o un router),
pero no puede transmitir información destinada a otros dispositivos ni enrutar
paquetes. De esta forma, este tipo de nodo puede estar dormido la mayor
parte del tiempo, aumentando la vida media de sus baterías.
c) Topología
La capa de red soporta múltiples configuraciones de red incluyendo estrella,
punto a multi punto, punto a punto y rejilla (malla).
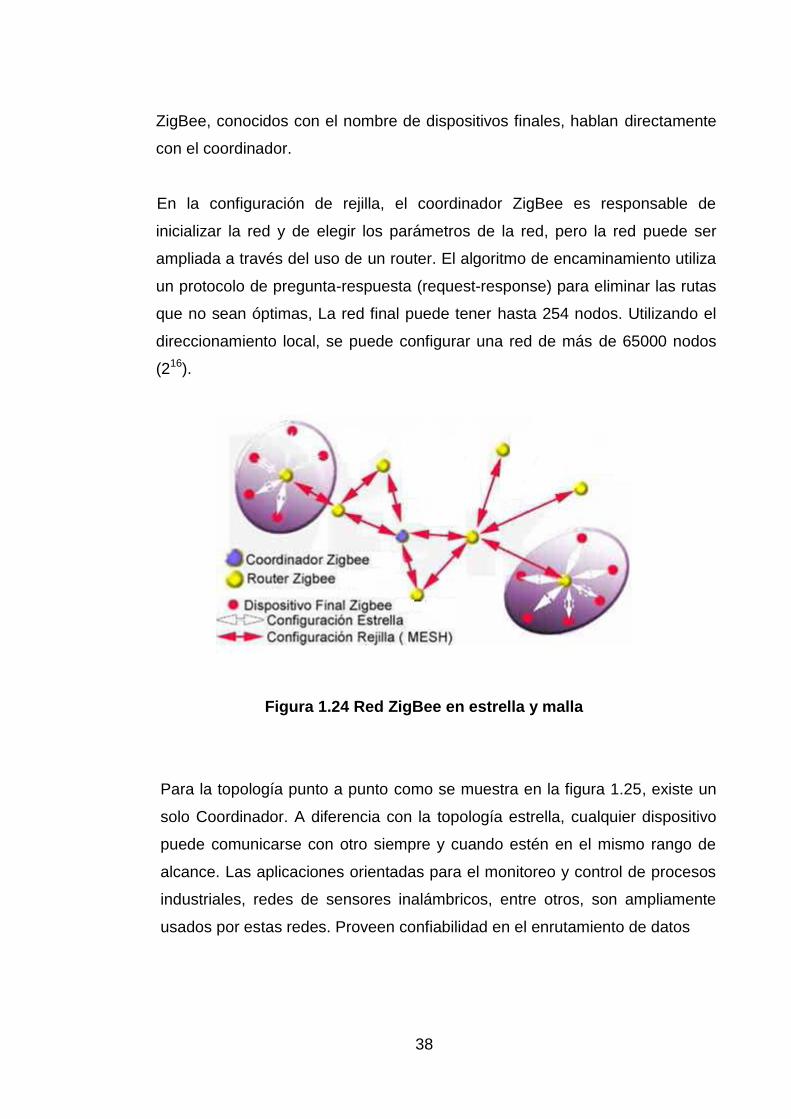
En la configuración en estrella como se puede apreciar en la figura 1.24, uno
de los dispositivos asume el rol de coordinador de red y es responsable de
inicializar y mantener los dispositivos en la red. Todos los demás dispositivos
38
ZigBee, conocidos con el nombre de dispositivos finales, hablan directamente
con el coordinador.
En la configuración de rejilla, el coordinador ZigBee es responsable de
inicializar la red y de elegir los parámetros de la red, pero la red puede ser
ampliada a través del uso de un router. El algoritmo de encaminamiento utiliza
un protocolo de pregunta-respuesta (request-response) para eliminar las rutas
que no sean óptimas, La red final puede tener hasta 254 nodos. Utilizando el
direccionamiento local, se puede configurar una red de más de 65000 nodos
(216).
Figura 1.24 Red ZigBee en estrella y malla
Para la topología punto a punto como se muestra en la figura 1.25, existe un
solo Coordinador. A diferencia con la topología estrella, cualquier dispositivo
puede comunicarse con otro siempre y cuando estén en el mismo rango de
alcance. Las aplicaciones orientadas para el monitoreo y control de procesos
industriales, redes de sensores inalámbricos, entre otros, son ampliamente
usados por estas redes. Proveen confiabilidad en el enrutamiento de datos

39
Figura 1.25 Topología punto a punto
d) Seguridad
En lo que respecta a seguridad en las comunicaciones, el subnivel MAC IEEE
802.15.4 ofrece funcionalidades que los niveles superiores pueden utilizar para
lograr alcanzar el nivel de seguridad deseado. Estos niveles pueden
especificar claves simétricas para proteger los datos y restringir éstos a un
grupo de dispositivos o a un enlace punto a punto. Estos grupos se especifican
en listas de control de acceso.
ZigBee especifica 4 servicios de seguridad.
Control de accesos: El dispositivo mantiene una lista de los dispositivos
comprobados en la red.
Datos Encriptados: Los cuales usan una encriptación con un código de
128 bits.
Integración de tramas: Protegen los datos de ser modificados por otros.
Secuencias de refresco: MAC realiza comprobaciones de frescura
(freshness check) entre recepciones sucesivas para asegurar que las
tramas viejas, cuyo contenido no se considera útil o válido ya, no
trascienden a los niveles superiores.

40
e) Aplicaciones
Los protocolos ZigBee están definidos para su uso en aplicaciones embebidas
con requerimientos muy bajos de transmisión de datos y consumo energético.
Se pretende su uso en aplicaciones de propósito general con características
de bajo costo. Puede utilizarse para realizar control industrial, albergar
sensores empotrados, recolectar datos médicos, ejercer labores de detección
de humo o intrusos utilizado ampliamente usado en la actualidad en domótica.
La red en su conjunto utilizará una cantidad muy pequeña de energía de forma
que cada dispositivo individual pueda tener una autonomía de hasta 5 años
antes de necesitar un recambio en su sistema de alimentación.
Figura 1.26 Aplicaciones de ZigBee

41
1.5.4.1 Configuración del los Módulo XBee-Pro
Los módulos XBee pueden operar en los siguientes modos, estos son:
a) Modo Recibir/Transmitir
Se encuentra en estos modos cuando el módulo recibe algún paquete RF a
través de la antena (modo Recibir) o cuando se envía información serial al
buffer del pin 3 (UART Data in) que luego será transmitida (modo Transmitir).
La información transmitida puede ser Directa o Indirecta. En el modo directo la
información se envía inmediatamente a la dirección de destino. En el modo
Indirecto la información es retenida por el módulo durante un período de
tiempo y es enviada sólo cuando la dirección de destino la solicita.
Además es posible enviar información por dos formas diferentes, unicast y
broadcast. Por la primera, la comunicación es desde un punto a otro, y es el
único modo que permite respuesta de quien recibe el paquete RF, es decir,
quien recibe debe enviar un ACK (indica que recibió el paquete, el usuario no
puede verlo, es interno de los módulos) a la dirección de origen.
b) Modo de Bajo Consumo (Sleep Mode)
El modo de Bajo Consumo o modo Sleep, corresponde cuando el módulo
entra en un estado de bajo consumo de energía. Esto depende de la
configuración en la que se encuentra. Se debe indicar que el ahorro de
energía depende enormemente del voltaje de alimentación.

42
Para entrar a este modo se debe configurar el comando SM (ATSM – Sleep
Mode). Si SM=4 o SM=5, el módulo entra al modo SLEEP cuando transcurre
un período dado por el comando ST (ATST-Time Before Sleeping-tiempo
antes de dormir). Donde ST posee un rango entre 0 y 0xFFFF (x 1ms). Si
SM=4, el módem despertará cada cierto tiempo, dado por SP (ATSP – Cyclic
Sleep Period), cuyo rango es entre 0 y 0x68B0 (x10 ms). Cuando despierte
buscará por datos entrantes desde un módulo configurado como Coordinador,
en caso de no haber nada, el módem volverá al modo SLEEP.
c) Modo Comando
Este modo permite ingresar comandos AT al módulo XBee, para configurar,
ajustar o modificar parámetros. Permite ajustar parámetros como la dirección
propia o la de destino, así como su modo de operación entre otras cosas. Para
poder ingresar los comandos AT es necesario utilizar el Hyperterminal de
Windows, el programa X-CTU o algún microcontrolador que maneje UART y
tenga los comandos guardados en memoria o los adquiera de alguna otra
forma.
Para ingresar a este modo se debe esperar un tiempo dado por el comando
GT (Guard Time, por defecto ATGT=0x3E85 que equivalen a 1000ms) luego
ingresar +++ y luego esperar otro tiempo GT. Como respuesta el módulo
entregará un OK.
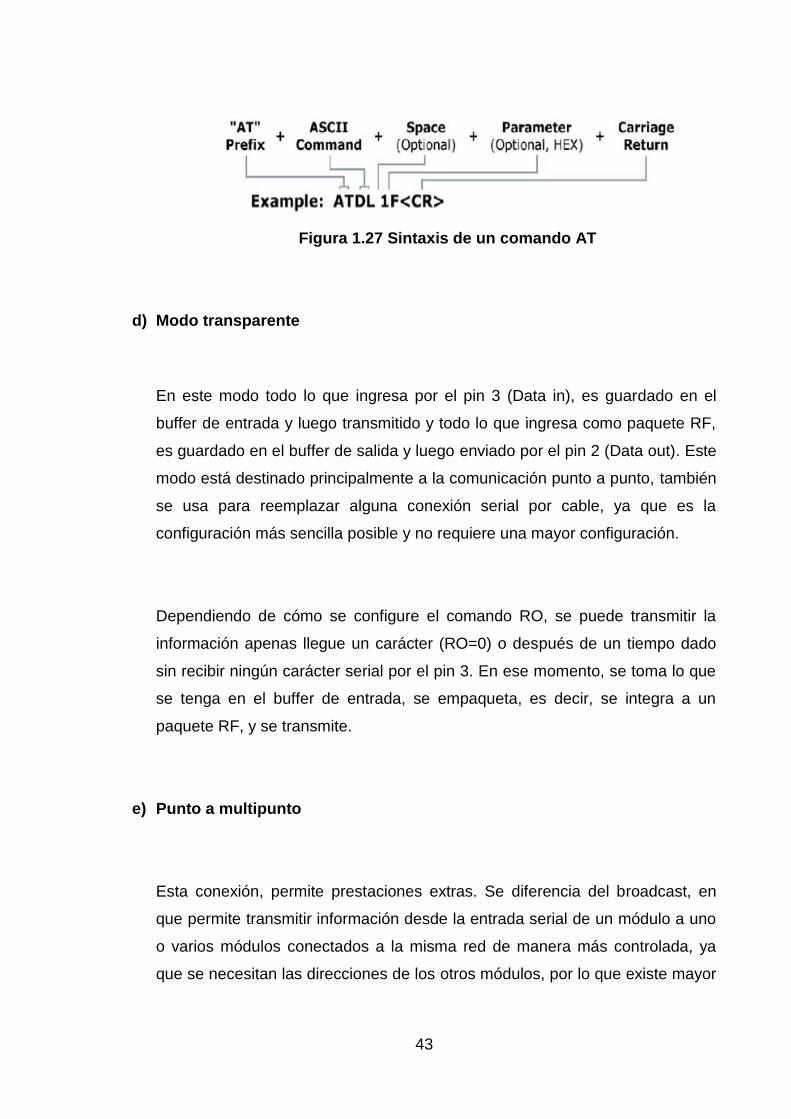
En la figura 1.27 muestra la sintaxis de un comando AT. Luego de ingresar a
este modo, se debe ingresar el comando deseado para ajustar los parámetros
del módulo XBee.
43
Figura 1.27 Sintaxis de un comando AT
d) Modo transparente
En este modo todo lo que ingresa por el pin 3 (Data in), es guardado en el
buffer de entrada y luego transmitido y todo lo que ingresa como paquete RF,
es guardado en el buffer de salida y luego enviado por el pin 2 (Data out). Este
modo está destinado principalmente a la comunicación punto a punto, también
se usa para reemplazar alguna conexión serial por cable, ya que es la
configuración más sencilla posible y no requiere una mayor configuración.
Dependiendo de cómo se configure el comando RO, se puede transmitir la
información apenas llegue un carácter (RO=0) o después de un tiempo dado
sin recibir ningún carácter serial por el pin 3. En ese momento, se toma lo que
se tenga en el buffer de entrada, se empaqueta, es decir, se integra a un
paquete RF, y se transmite.
e) Punto a multipunto
Esta conexión, permite prestaciones extras. Se diferencia del broadcast, en
que permite transmitir información desde la entrada serial de un módulo a uno
o varios módulos conectados a la misma red de manera más controlada, ya
que se necesitan las direcciones de los otros módulos, por lo que existe mayor

44
seguridad. Para esto se necesitan dos comandos más aparte de MY y DL. Se
utilizará el direccionamiento de 16 bits.
El primer comando es el ID de la PAN (Personal Area Network- Red de Área
Personal). Todos los módulos que tengan idéntico ID, pertenecerán a la
misma red. El comando para configurar este valor es ATID, y su rango va
entre 0x0 y 0xFFFD. Por ejemplo si queremos ajustar el PAN ID como
0x3332, se debe ingresar ATID3332. Este parámetro también es arbitrario, al
igual que MY y DL.
El otro comando corresponde al canal por el cual se va a comunicar, se
disponen de 16 canales según el protocolo IEEE 802.15.4. Para cambiar de
canal se utiliza el comando CH con el número de canal en formato
hexadecimal. Es decir, si se desea ocupar el canal 15 (0x10), se ingresa
ATCH10. Con todo lo anterior es posible configurar una PAN y hacer una
conexión punto a multipunto. La red se vería como se muestra en la figura
2.28.
Figura 1.28 Configuración punto a multipunto
MY=0X5FFF CH=0X10 ID=3332
MY=0X03 CH=0X10 ID=3332
MY=0X04 CH=0X10 ID=3332
MY=0X02 CH=0X10 ID=3332
MY=0X01 CH=0X10 ID=3332

45
f) Broadcast
Esta configuración permite el envío de información desde un nodo a varios
nodos en una misma red PAN. La información recibida es la misma para todos
los nodos. Para que un módulo entregue datos a todos los nodos, es
necesario ajustarlo con la dirección de broadcast. Cualquier módulo que reciba
un paquete con una dirección de destino de broadcast será aceptado, la
dirección de broadcast es:
DL=0x0000FFFF
DH=0x00000000
Esta dirección puede ser configurada en todos los nodos de la red, ya sea que
estén en direccionamiento de 16 o 64 bits. Así se puede ingresar ATDH0 y
ATDL0000FFFF en todos los módulos para que el modo broadcast esté
habilitado. Para que este modo funcione, los módulos deben pertenecer a la
misma PAN ID y al mismo canal. La siguiente figura muestra una red de
broadcast en cada nodo:
Figura 1.29 Red de broadcast
MY=0X01 DH=0X00 DL=0XFFFF
MY=0X02 DH=0X00 DL=0XFFFF
MY=0X03 DH=0X00 DL=0XFFFF
MY=0X04 DH=0X00 DL=0XFFFF

46
Se observa en la figura anterior la configuración de broadcast. Si se envía
algún dato por el módulo 0x0001, la información enviada será recibida por
igual en el resto de los módulos (0x0002, 0x0003 y 0x0004). Del mismo modo
si se envía algún dato por otro módulo, por ejemplo por el 0x0004, este dato
le llegará al resto, es decir, al 0x0001, 0x0002 y al 0x0003.
Cabe mencionar que este tipo de red o de envío de datos, no entrega
respuesta de recibo o ACK, por lo que no es posible saber si el paquete fue
entregado correctamente o si es que llegó.
Si se ajusta la dirección PAN ID del módulo como ID=0xFFFF, se produce
Broadcast a todas las redes PAN. Esto es, los datos son transmitidos a las
distintas redes PAN, si se configura a los módulos con el comando
ATID=0xFFFF y además ATDL=0xFFFF se realiza doble broadcast, es decir,
además de transmitirse los datos a todas las redes PAN, el mensaje es
transmitido a todos los módulos de cada una de ellas.
1.5.4.2 Direccionamiento de los módulos10
Los módulos permiten 2 tipos de direccionamiento. La de 16 bit y la de 64 bits. La
principal diferencia es que en la de 64 bit, es posible obtener una mayor cantidad
de direcciones y por lo tanto, una mayor cantidad de nodos o equipos funcionando
10
http://www.rogercom.com/ZigBee/ZigBee.htm

47
en la misma red. Son a través de estas direcciones que los módulos se
comunican entre sí.
La dirección de origen de 16 bits del módulo se define arbitrariamente con el
comando MY (ATMY). La de destino con los comandos DL (ATDL – Destination
Address Low) y DH (Destination Address High).
a) Direccionamiento de 16 bit.
El comando MY, define un número de 16 bit como dirección del módulo dentro
de la red. El rango se encuentra entre 0x0 y 0xFFFE (la dirección 0xFFFF y
0xFFFE son para habilitar la dirección de 64-bit, por lo que si se desea utilizar
direccionamiento de 16 bits, estos valores no deben ser usados). Para definirla
se ingresa ATMY y el número en formato hexadecimal, pero sin el „0x‟. Por
ejemplo si a un módulo se le quiere asignar la dirección 0x3BF1 (15345 en
decimal), entonces se debe ingresar el comando ATMY3BF1.
Así para habilitar el direccionamiento de 16 bit, se debe utilizar una dirección
menor a 0xFFFE con el comando MY, de igual modo para DL y se debe dejar
en cero el comando DH=0 (ATDH0). No se permite usar la dirección 0xFFFE ni
0xFFFE para el direccionamiento de 16 bits.
b) Direccionamiento de 64 bits
El número 0xFFFF y 0xFFFE del comando MY, se usa cuando se desea
desactivar el direccionamiento de 16 bit, y se habilita el uso de la dirección de
64 bit. Con este direccionamiento ya no es posible definir la dirección de
origen del módulo, ya que ésta se asigna automáticamente. En este caso, la
dirección del módulo corresponde a su número serial, que viene de fábrica y el
48
cual es imposible de cambiar. Este número se encuentra guardado en dos
variables de 32 bit cada una (SL y SH) y es único. SL lee los 32 bit menos
significativos del número serial y SH los 32 más significativos.
Cuando se utiliza direccionamiento de 64 bit, para asignar una dirección de
destino, se utilizan los comandos DL y DH. Éstos son de 32 bit cada uno y
juntos (DL+DH) forman el número de 64 bit que debe corresponder con el
número serial de otro módulo formado por SL+SH. DL debe ser igual a SL y
DH debe ser igual a SH, donde SL+SH corresponden al número serial de un
módulo destino configurado para direccionamiento de 64 bits.
Para el desarrollo del proyecto los módulos Xbee están configurados para
trabajar en modo transparente, esta es la conexión que viene por defecto y es
la forma más sencilla de configurarlos. Básicamente todo lo que pasa por el
puerto UART (DIN, pin 3), es enviado al módulo deseado, y lo recibido en el
módulo, es enviado devuelta por el mismo puerto UART (DOUT, pin2).
1.5.5 Estándar IEEE 802.15.4 para comunicación inalámbrica11
IEEE 802.15.4 es un estándar que define el nivel físico y el control de acceso al
medio de redes inalámbricas de área personal con tasas bajas de transmisión de
datos (low-rate wireless personal area network, LR-WPAN). La actual revisión del
estándar se aprobó en 2006. El grupo de trabajo IEEE 802.15 es el responsable
de su desarrollo. También es la base sobre la que se define la especificación de
ZigBee, cuyo propósito es ofrecer una solución completa para este tipo de redes
11
http://es.wikipedia.org/wiki/ZigBee

49
construyendo los niveles superiores de la pila de protocolos que el estándar no
cubre.
1.5.6 Aplicaciones de la tecnología inalámbrica
La tecnología inalámbrica también ofrece excelentes soluciones cuando se
necesitan instalaciones de redes temporales, para esto es necesario escoger el
protocolo de comunicación inalámbrico necesario, estas son algunas de las
aplicaciones habituales de las redes inalámbricas.
Redes temporales
Aplicaciones móviles
Soluciones de red flexible
LAN interconectadas
Monitoreo de variables
Sensores móviles
En máquinas rotantes o móviles
En contenedores en transporte
Para acceder a instalaciones remotas
Acceso a una red de área local / inalámbrica (LAN/WLAN) con cualquier
número de dispositivos, sin necesidad de cables o conectores y con infinitas
posibilidades.

50
1.6 INTRODUCCIÓN A LOS MICROCONTROLADORES12
El microcontrolador nace cuando las técnicas de integración han progresado lo
bastante para permitir su fabricación; pero también porque, muy a menudo, tanto
en las aplicaciones domésticas como industriales, se tiene la necesidad de
sistemas “inteligentes” o, al menos programables. Un ejemplo muy simple es el
programador de una lavadora, el cual debe controlar una cierta cantidad de
elementos con ciclos y cadencias perfectamente definidas, pero variables en
función del programa seleccionado. Otras aplicaciones más técnicas tienen,
igualmente, necesidad de sistemas programables. Por ejemplo, una fotocopiadora
debe controlar permanentemente un gran número de elementos y de funciones.
Gracias a la llegada de los microcontroladores, tarjetas que contenían varias
decenas de circuitos lógicos clásicos se han visto reducidas a dos o tres
microcontroladores.
1.6.1 Características generales de los microcontroladores
Actualmente los microcontroladores son el estándar para un sin número de
aplicaciones tanto a nivel educativo como a nivel industrial por la facilidad para
programarlos y por los niveles de prestaciones que poseen.
Las características más importantes de los microcontroladores son:
Frecuencia de reloj de 30 Mhz (o más).
Múltiples puertos de entrada / salida programables.
12
http://ocw.upm.es/tecnologiaelectronica/microprocesadores/contenidos/Archivos_Semana_1/introduccion_a
_los_ microcontroladores.pdf

51
Bajo consumo en versiones CMOS.
Alta inmunidad al ruido.
Set de instrucciones muy potente.
Instrucciones orientadas al proceso de señales bit a bit.
Circuito de reloj incorporado.
Osciladores a cristal o RC.
Perro guardián (watchdog), que vigila el optimo funcionamiento de la CPU.
Conversores integrados A/D.
Conversores integrados D/A.
Salida de modulación de ancho de pulso (PWM).
Temporizadores-contadores de 16 bits.
Más de 6 niveles de interrupciones programables con niveles de prioridad.
Protección de la memoria de programa (encriptación o código protegido).
1.6.2 Componentes de un microcontrolador13
Un microcontrolador dispone normalmente de los siguientes componentes:
Procesador o CPU (Unidad Central de Proceso).
Memoria RAM para Contener los datos.
Memoria para el programa tipo ROM/PROM/EPROM.
Líneas de E/S para comunicarse con el exterior.
Diversos módulos para el control de periféricos (temporizadores, Puertas Serie
y Paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores
Digital/Analógico, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de todo el
sistema.
13
http://www2.ing.puc.cl/~iee3912/files/pic.pdf

52
En la figura 1.30 se muestra en forma de bloques los diferentes componentes que
forman un microcontrolador.
Figura 1.30 Componentes de un microcontrolador
El microcontrolador es en definitiva un circuito integrado que incluye todos los
componentes de un computador. Debido a su reducido tamaño es posible montar
el controlador en el propio dispositivo al que gobierna. En este caso el controlador
recibe el nombre de controlador empotrado.
1.6.3 Aplicaciones de los microcontroladores
Las aplicaciones específicas de los microcontroladores son tan variadas que no
se exagera cuando se dice que éstas están limitadas solamente por la
imaginación del diseñador. Cada vez existen más productos que incorporan un
microcontrolador con el fin de aumentar sustancialmente sus prestaciones, reducir
su tamaño y costo, mejorar su fiabilidad y disminuir el consumo.

53
En cualquier problema en el cual se requiera un instrumento digital compacto que
sea capaz de realizar funciones como las siguientes, es posible pensar en
sistema basado en un microcontrolador: secuenciamiento,
codificación/decodificación, monitoreo, adquisición de datos, señalización,
procesamiento de señales, control retroalimentado, temporización, cálculos
aritméticos sencillos, comunicaciones, automatización, despliegue digital, control
ON-OFF.
Instrumentos portátiles compactos
Radio paginador numérico (beeper).
Planímetro electrónico.
Nivelímetro digital.
Identificador-probador de circuitos integrados.
Tacómetro digital (desarrollado en el Labora-torio de Electrónica).
Dispositivos periféricos
Modems.
Buffer para impresoras.
Plotters.
Posicionadores.
Dispositivos autónomos (stand alone)
Fotocopiadoras.
Máquinas de escribir.
Selector, codificador - decodificador de T.V.
Localizador de peces.

54
Controlador de aspersores para riego de jardines.
Teléfonos de tarjeta.
Subfunciones de instrumentos
Panel frontal de un osciloscopio.
Controlador de display de cristal líquido sensible al tacto.
Contador de microondas con interface HP-IB.
Multímetro multiplexado con interface serie a otro multímetro.
Analizador de espectros (módulos de expansión para IR y RF comunicados vía
Inter-face serie).
Otros
Cerraduras electrónicas.
Sistemas de seguridad.
Electrodomésticos, aparatos de audio y video.
Domótica (edificios inteligentes).
Medicina.
1.6.4 Características
A continuación se muestran algunas características importantes.
Cápsula en plástico Dual-in-line 28 patillas.
Alimentación de 3 a 5,5 V c.c.
Consumo < 0,6 mA a 3 Vcc.
22 puertas Input/Output programables.

55
Memoria Programa Flash 8 K
Memoria RAM 368
Interrupciones: 13 fuentes.
Oscilador: máx. 20 MHz.
Número de instrucciones: 35.
5 convertidores analógico-digitales de 10 bits.
3 temporizadores.
2 módulos Capturadores/Comparadores/PWM.
Comunicación serie: MSSP, USART.
1.7 COMUNICACIÓN SERIAL 14
1.7.1 Introducción
Sin la comunicación serie no habría intercambio de información textual, no
existirían los cajeros electrónicos, ni las tarjetas de crédito, no habría Internet.
La comunicación serie es importantísima para cualquier microcontrolador ya que
de ésta forma puede dejar de ser un chip aislado, abrirse al mundo, socializar,
permitiéndole interactuar con cualquier dispositivo que también soporte una
comunicación serial como ordenadores o simplemente otro microcontrolador.
14
http://www.prodigyweb.net.mx/saucedo8/sci.pdf
56
Para que dos dispositivos cualquiera se puedan comunicar (sea un
microcontrolador o un ordenador) tienen que ponerse de acuerdo en qué sistema
de comunicación van a utilizar. La comunicación serie se puede dividir en dos
categorías comunicación asíncrona y síncrona, la síncrona requiere de un reloj y
una línea de datos, los datos se van transmitiendo uno a uno con cada pulso de
reloj. En la asíncrona los dispositivos se ponen de acuerdo en la velocidad de
comunicación uno de ellos transmite y el otro recibe y/o viceversa.
1.7.2 Líneas o canales de comunicación
Se pueden establecer canales para la comunicación de acuerdo a tres técnicas,
siempre tomando al microcontrolador como referencia (transmisor) y al periférico
como destino (receptor):
a. Simplex.
b. Semi duplex (Half duplex).
c. Full dúplex.
a) Simplex
En ella la comunicación serie usa una dirección y una línea de comunicación.
Siempre existirá un transmisor y un receptor, no ambos.
La ventaja de este sistema consiste en que es necesario sólo un enlace a dos
hilos. La desventaja radica en que el extremo receptor no tiene ninguna forma
de avisar al extremo transmisor sobre su estado y sobre la calidad de la
información que se recibe. Esta es la razón por la cual, generalmente no se
utiliza.

57
b) Semi dúplex
La comunicación serie se establece a través de una sola línea, pero en ambos
sentidos. En un momento el transmisor enviará información y en otro recibirá,
por lo que no se puede transferir información en ambos sentidos de forma
simultánea. Este modo permite la transmisión desde el extremo receptor de la
información, sobre el estado de dicho receptor y sobre la calidad de la
información recibida por lo que permite así la realización de procedimientos de
detección y corrección de errores.
c) Full dúplex
Se utilizan dos líneas (una transmisora y otra receptora) y se transfiere
información en ambos sentidos. La ventaja de este método es que se puede
transmitir y recibir información de manera simultánea. La mayoría de los
dispositivos especializados para la comunicación pueden transferir información
tanto en full duplex como en half dúplex.
1.7.3 La transmisión síncrona15
Es el método más eficiente de comunicación en cuanto a velocidad de
transmisión, esto se debe a que no existe ningún tipo de información adicional
entre los caracteres a ser transmitidos.
15
http://www.prodigyweb.net.mx/saucedo8/sci.pdf

58
Cuando se transmite de manera síncrona lo primero que se envía es un octeto de
sincronismo ("sync"). El octeto de sincronismo realiza la misma función que el bit
de inicio en la transmisión asíncrona, indicando al receptor que va ha ser enviado
un mensaje. Este caracter, además, utiliza la señal local de reloj para determinar
cuándo y con qué frecuencia será muestreada la señal, es decir, permite
sincronizar los relojes de los dispositivos transmisor y receptor. La mayoría de los
dispositivos de comunicación llevan a cabo una resincronización contra posibles
desviaciones del reloj, cada uno o dos segundos, insertando para ello caracteres
del tipo "sync" periódicamente dentro del mensaje.
Los caracteres de sincronismo deben diferenciarse de los datos del usuario para
permitir al receptor detectar los caracteres "sync". Por ejemplo, el código ASCII
utiliza el octeto 10010110.
Un ejemplo de transmisión síncrona se ve en la figura 1.31.
Figura 1.31 Transmisión síncrona
Existen ocasiones en que son definidos dos caracteres de sincronismo, ello puede
ser necesario si, por cualquier motivo el caracter "sync" original se desvirtuara, el
siguiente permitirá la reinicialización del receptor. En segundo lugar, puede ocurrir
que el equipo receptor necesite un tiempo adicional para adaptarse a la señal
entrante.

59
Cuando se transmite de forma síncrona, es necesario mantener el sincronismo
entre el transmisor y el receptor cuando no se envían caracteres, para ello son
insertados caracteres de sincronismo de manera automática por el dispositivo que
realiza la comunicación como se indica en la figura 1.32.
Figura 1.32 Inserción de caracteres de sincronismo
1.7.4 La transmisión asíncrona16
Cuando se opera en modo asíncrono no existe una línea de reloj común que
establezca la duración de un bit y el caractér puede ser enviado en cualquier
momento. Esto conlleva que cada dispositivo tiene su propio reloj y que
previamente se ha acordado que ambos dispositivos transmitirán datos a la
misma velocidad.
No obstante, en un sistema digital, un reloj es normalmente utilizado para
sincronizar la transferencia de datos entre las diferentes partes del sistema. El
reloj definirá el inicio y fin de cada unidad de información así como la velocidad de
transmisión. Si no existe reloj común, algún modo debe ser utilizado para
sincronizar el mensaje.
El tiempo por bit en una línea en que se transfiere la información a 2400 bps es de
unos 416 microsegundos (1 seg/2400). Una frecuencia de muestreo de 2400
16
http://www.prodigyweb.net.mx/saucedo8/sci.pdf

60
veces por segundo nos permitirá muestrear el principio o el final del bit. En ambos
casos detectaremos el bit, sin embargo, no es extraño que la señal cambie
ligeramente, y permanezca la línea con una duración un poco más larga o más
corta de lo normal. Por todo ello, una frecuencia de muestreo lenta no sería capaz
de detectar el cambio de estado de la señal a su debido tiempo, y esto daría lugar
a que la estación terminal no recibiera los bits correctamente.
a) Bit de inicio y bit de parada17
En la transmisión asíncrona un carácter a transmitir es encuadrado con un
indicador de inicio y fin de carácter, de la misma forma que se separa una
palabra con una letra mayúscula y un espacio en una oración. La forma
estándar de encuadrar un carácter es a través de un bit de inicio y un bit de
parada.
Durante el intervalo de tiempo en que no son transferidos caracteres, el canal
debe poseer un "1" lógico. Al bit de parada se le asigna también un "1". Al bit
de inicio del carácter a transmitir se le asigna un "0". Por todo lo anterior, un
cambio de nivel de "1" a "0" lógico le indicará al receptor que un nuevo
carácter será transmitido como se puede observar en la figura 1.33.
Figura 1.33 Formato de transmisión asíncrona
17
http://www.roso-control.com/_Download/Cursos/MDK-B28/Cap_No_08.pdf

61
b) Velocidad de transmisión
En la transmisión asíncrona por cada caracter se envía al menos 1 bit de inicio
y 1 bit de parada así como opcionalmente 1 bit de paridad. Esta es la razón de
que los baudios no se correspondan con el número de bits de datos que son
transmitidos.
Por ejemplo para transmitir un caracter se necesitará:
1 bit inicio + 6 bits datos + 1 bit paridad + 2 bits parada =10 bits.
Como la velocidad de transmisión es 2400 baudios y cada caracter consume
10 bits, se transmitirán 240 caracteres por segundo (2400/10). Como cada
caracter posee 6 bits de datos serán transmitidos 240 * 6 = 1440 bits de datos
por segundo.
La característica fundamental del formato de transmisión asíncrono es su
capacidad de manejar datos en tiempo real, con un intervalo de longitud
arbitraria entre caracteres sucesivos. Al final de cada caracter, la línea va a 1
en el bit de parada y permanece en ese estado durante un número arbitrario
de bits ociosos. El inicio del nuevo caracter estará definido por la transición a 0
del bit de inicio.
c) Reglas de transmisión asíncrona
La transmisión asíncrona es la definida por la norma RS232, y se basa en las
siguientes reglas:

62
Cuando no se envían datos por la línea, ésta se mantiene en estado alto
(1).
Cuando se desea transmitir un caracter, se envía primero un bit de inicio
que pone la línea en estado bajo (0) durante el tiempo de un bit.
Durante la transmisión, si la línea está a nivel bajo, se envía un 0 y si está
a nivel alto se envía un 1.
A continuación se envían todos los bits del mensaje a transmitir con los
intervalos que marca el reloj de transmisión. Por convenio se transmiten
entre 5 y 8 bits.
Se envía primero el bit menos significativo, siendo el más significativo el
último en enviarse.
A continuación del último bit del mensaje se envía el bit (o los bits) del final
que hace que la línea se ponga a 1 por lo menos durante el tiempo mínimo
de un bit. Estos bits pueden ser un bit de paridad para detectar errores y el
bit o bits de parada, que indican el fin de la transmisión de un carácter.
Los datos codificados por esta regla, pueden ser recibidos siguiendo los pasos
siguientes:
Esperar la transición 1 a 0 en la señal recibida.
Activar el reloj con una frecuencia igual a la del transmisor.
Muestrear la señal recibida al ritmo de ese reloj para formar el mensaje.
Leer un bit más de la línea y comprobar si es 1 para confirmar que no ha
habido error en la sincronización.
1.7.5 Detección de errores en la comunicación
Cuando se escriben o se envían datos, pueden producirse errores, entre otras
cosas, por ruidos inducidos en las líneas de transmisión de datos. Es por tanto

63
necesario comprobar la integridad de los datos transmitidos mediante algún
método que permita determina si se ha producido un error.
En un caso típico, si al transmitirse un mensaje se determina que se ha producido
un error, el receptor solicita de nuevo el mensaje al emisor.
Se pueden detectar errores de acuerdo a la forma de transmisión:
1. Transmisión asíncrona:
a. Paridad.
b. Sobre escritura.
c. Error de encuadre.
2. Transmisión síncrona:
a. Paridad.
b. Sobre escritura.

64
CAPÍTULO II
ANÁLISIS Y DISEÑO
2.1 ESPECIFICACIÓN DE REQUISITOS DEL SISTEMA DE
CONTROL
En la empresa Novacero S.A Planta Lasso con el fin de seguir mejorando cada
uno de sus procesos de producción manteniendo un alto nivel de seguridad de
operación en cada una de las tareas y procesos que se realizan, se planteó la
necesidad de implementar un sistema de control inalámbrico para el manejo de
los puentes grúa, el mismo que en la actualidad no cuenta con los requerimientos
de seguridad suficientes para su funcionamiento.
El diseño e implementación de este sistema de control permitirá al operador del
puente grúa realizar su trabajo desde una distancia segura.
Para el efecto, se estableció que la implementación del sistema de control se lleve
a cabo de la siguiente manera:
1. Análisis y selección del tipo de tecnología inalámbrica que garantice una
comunicación confiable y segura entre el transmisor y el receptor dentro de un
ambiente industrial.

65
2. Análisis y selección de los componentes necesarios para la implementación
del sistema de control.
3. Diseño y construcción del hardware tanto para el transmisor como para el
receptor.
4. Diseño e implementación del software que permita realizar el control de los
movimientos del puente grúa y verificar las seguridades del mismo, como son
el estado del sensor final de carrera y del sensor de carga y así como también
permitir ejecutar las acciones necesarias dentro del sistema, en caso de existir
una condición peligrosa.
5. Generación de la documentación técnica necesaria del prototipo desarrollado.
2.1.1 DIAGRAMA DE BLOQUES
Para la ejecución de este proyecto la parte del transmisor y receptor fueron
analizados independientemente y la lógica de funcionamiento de cada uno de
ellos está representada en los diagramas de bloques que se muestran en la
figuras 2.1 y 2.2.

66
Figura 2.1 Diagrama de bloques para el transmisor
Los bloques del transmisor se describen a continuación:
1.- La fuente de voltaje para el transmisor son unas baterías pequeñas que
proporcionan la energía necesaria para que todo el circuito y sus componentes
funcionen, a partir de este voltaje se realizan dos etapas de regulación.
2.- El regulador LM7805 entrega un voltaje de salida fijo de 5 voltios para la
polarización del microcontrolador y todos los componentes que interviene en la
parte de control.
Salidas a indicadores
2
1
4
3
5
6
7
Baterías recargables
Regulador LM 7805 Regulador LM 317
PIC
16
F8
76A

67
3.-El regulador LM317 entrega un voltaje de salida regulable de 3.3Voltios para la
polarización del módulo de radiofrecuencia.
4.- El módulo de radiofrecuencia es el encargado de emitir las señales de control
provenientes del microcontrolador hacia el receptor y de la misma forma este
módulo puede recibir señales provenientes del receptor estableciendo una
comunicación Full Dúplex entre ellos.
5.- El microcontrolador es el cerebro de todo el sistema de control, en él se
encuentra almacenado toda la programación y algoritmos para el funcionamiento
del mismo, en los pines del microcontrolador programados como entradas
ingresan todas las señales provenientes de la botonera y según el movimiento del
puente que se ha realizado o si el paro de emergencia ha sido presionado se
envía una señal de control hacia el modulo de radiofrecuencia ubicado en el
receptor.
6.- La botonera es la encargada de realizar todas las acciones de maniobra del
puente grúa como son: Movimientos del puente hacia el norte y hacia el sur,
movimientos del carro hacia la izquierda y hacia la derecha, movimiento del
gancho hacia arriba y hacia abajo, cada uno de estos movimientos son activados
por un pulsador el cual envía una señal de activación al microcontrolador, a más
de las señales de maniobra también se envía una señal de ON-OFF para el
encendido y apagado del transmisor y una señal proveniente del hongo de paro
de emergencia para deshabilitar toda acción posible dentro del proceso en caso
de existir una condición de emergencia o falla.
7.- Mediante este tipo de comunicación el transmisor puede saber el estado de los
elementos de seguridad del puente que se encuentran en la parte del receptor,

68
6
7
Fuente de voltaje
Regulador LM 317
estos elementos son: El sensor de carga, el sensor final del cable y el estado de
los relés térmicos de los motores que mueven el puente grúa, éstas variables si
llegaran a ser activadas, el receptor envía una señal de control hacia el transmisor
la misma que pasa al microcontrolador, el cual habilitará sus salidas indicando
que se ha activado una de ellas las cuales serán visualizadas en la botonera por
medio de leds indicadores.
A continuación se muestra el diagrama de bloques para el receptor.
Figura 2.2 Diagrama de bloques para el receptor
1
2 3
4 5
Relés de 12 voltios
Contactores
de potencia Motores de AC
Regulador LM 7805
PIC
16
F8
76A
Op
to a
cop
lad
ore
s
Re
lé T
érm
ico
Sensor de
carga
Sensor
final de
cable

69
Como se puede observar el diagrama de bloques del transmisor es similar al del
receptor en los puntos 1,2,3,4,5 ya que cuenta con los mismos elementos tanto en
la etapa de control con el PIC 16F876A, en la etapa de comunicación con el
módulo XBee-Pro como también en la etapa de regulación de voltaje con el
LM7805 y LM317, lo que cambia para el receptor es la programación del
microcontrolador y la conexión de sus entradas y salidas las cuales para su
explicación están agrupadas el bloques etiquetadas con 6 y 7 respectivamente.
Las señales enviadas desde el transmisor son recibidas por el receptor, estas
señales, como se puede ver en el bloque 6, energizan la bobina de un pequeño
relé cuyos contactos abren y cierran unos contactos de potencia que permiten la
activación y desactivación de los motores que permiten realizar cada uno de los
movimientos del puente grúa.
En el bloque 7 se encuentran las entradas del microcontrolador a las cuales llegan
las señales de los elementos de protección para el puente grúa como el sensor
final de cable, el sensor de carga, y el MCC que representa la activación de los
relés térmicos, cada una de estas señales pasa por un opto transistor para
proteger las entradas del microcontrolador y dependiendo del estado de estos
sensores es decir si fueron activados, se envía una señal de control a través del
módulo de radio frecuencia hacia el transmisor.
2.2 ESTUDIO Y SELECCIÓN DE TECNOLOGÍA Y
COMPONENTES A IMPLEMENTAR
La selección de tecnología y componentes se convierte en uno de los aspectos
importantes para el desarrollo y culminación del proyecto, cabe recalcar que los

70
componentes han sido seleccionados de acuerdo a sus características técnicas,
disponibilidad y el costo de los materiales en el mercado.
2.2.1 Estudio y selección de tecnología inalámbrica
Entre las diversas tecnologías existentes en el mercado para comunicación
inalámbrica y tomando en cuenta que el medio en donde se va a establecer la
comunicación inalámbrica es un área donde existe mucho ruido y mucha
interferencia provocada por varios equipos que funcionan en el lugar de
operación, así como que el consumo de potencia al momento de transmitir datos
debe ser bajo, se consideran tres tipos de tecnología como Wi-fi, Bluetooth y
ZigBee siendo las dos primeras las más reconocidas para aplicaciones
inalámbricas, esta comparación se puede apreciar en la tabla 2.1.
Tabla 2.1 Comparación de tecnologías inalámbricas

71
Por lo expuesto en la tabla 2.1, se ha considerado a ZegBee como una buena
alternativa por sus características:
Ultra-bajo consumo de potencia.
Costo muy bajo.
Tiene una velocidad de transmisión de 250 Kbps.
Alcance de transmisión en interiores 100 m (Para XBee-Pro).
Alcance de transmisión en exteriores hasta 1500 m (Para XBee-Pro).
Velocidad de transmisión serial 1200-115200 bps.
A pesar de coexistir en la misma frecuencia con otros tipos de redes como
Wi-Fi o Bluetooth su desempeño no se ve afectado.
Uso de bandas de radio libres y sin necesidad de licencias.
Puede operar a temperaturas industriales de -40 a 85º C.
Instalación barata y simple.
Soporta topologías Punto a Punto, Punto a Multipunto, estrella, árbol.
En la siguiente figura podemos observar los diferentes modelos de módulos
XBee-Pro.
Figura 2.3 Módulos XBee-Pro

72
La descripción y características completas se muestran en el datasheet incluido
en el Anexo B.
Los módulos XBee-Pro pueden ser programados a través de una interface serial y
USB con un software propietario llamado X-CTU, con este software podemos
definir de una forma rápida todos los parámetros que queramos modificar en
nuestros módulos.
2.2.2 Configuración en modo transparente
Existen básicamente 4 tipos de conexión cuando se trabaja en modo
transparente, la diferencia principal radica en el número de nodos o puntos de
acceso, y la forma en que éstos interactúan entre sí.
a) Punto a Punto
Es la conexión ideal para reemplazar comunicación serial por un cable. Sólo
se debe configurar la dirección. Para ello se utilizan los comandos MY y el DL,
la idea es definir arbitrariamente una dirección para un módulo, usando el
comando MY, el cual se va a comunicar con otro que tiene la dirección DL,
también definida arbitrariamente. Con esto cada módulo define su dirección
con MY, y escribe la dirección del módulo al cual se desea conectar usando
DL.
En este modo, el módulo receptor del mensaje envía un paquete al módulo de
origen llamado ACK que indica que el mensaje se recibió correctamente.

73
En la siguiente figura se muestra un pequeño ejemplo donde las direcciones
se eligieron arbitrariamente:
Figura 2.4 Configuración del módulo 1
Se observa en la figura anterior que en el módulo 1 se ajustó la dirección de
origen como 0x3BA2 (ATMY3BA2), mientras que la dirección de destino se
asignó como 0xCC11 (ATDLCC11) que corresponde al módulo 2. En el otro
módulo se observa lo siguiente:

74
Figura 2.5 Configuración módulo 2
En este módulo se asignó como dirección de origen 0xCC11 (ATMYCC11) y
como dirección de destino 0x3BA2 (ATDL3BA2) que corresponde al módulo
1. La siguiente figura muestra un ejemplo gráfico de lo anterior.
Figura 2.6 Direccionamiento 16 y 64 Bits
MY=0X3BA2 DL=0XCC11 DH=0
MY=0XCC11 DL=0X3BA2
DH=0
MY=0XFFFF DH=0X321 DL=0XCBA SH=0XABC SL=0X123
MY=0XFFFF DH=0XABC DL=0X123 SH=0X321 SL=0XCBA

75
En la figura anterior se muestra que la primera conexión es una punto a
punto utilizando direccionamiento de 16 bit, mientras que la segunda utiliza
direccionamiento de 64 bits. Una vez configurados estos parámetros, los
módulos se encuentran listos para funcionar. Así todo lo que se transmite
por el pin DIN de un módulo, es recibido por el pin DOUT del otro.
Para que el modo Punto a Punto funcione, es primordial que los módulos
estén en la misma PAN ID (comando ATID) y el mismo canal (comando
ATCH) para que puedan comunicarse.
b) Cable Virtual I/O
Esta opción de configuración permite crear los llamados Cables Virtuales.
Se utilizan para crear un canal de comunicación de manera transparente
entre los pines de un módulo y otro. Cada pin de entrada tiene su propio
pin de salida ya definido entre nodos, esto permite una forma totalmente
simple de enviar información, controlar o medir de manera sencilla y rápida,
sin necesidad de complicadas configuraciones.
Para crear un cable virtual, se debe notar que los pines de entrada/salida o
I/O, están asociados entre sí, es decir, vienen en pares. Por esto, sólo se
pueden crear cables entre estos pares de pines de distintos módulos. Por
ejemplo, una entrada digital DI5, sale por una salida digital DO5 y una
entrada analógica ADC 0, sale por una salida analógica PWM 0. Algunas
entradas y salidas tienen el mismo pin asignado, pero en otros como los
analógicos éstas se encuentran en diferentes pines. Por ejemplo DI-0 y
DO-0 están en el pin 20 (DIO-20). Pero la entrada ADC-1 tiene la salida
PWM-1 asignados a los pines 19 (AD1) y 6 (PWM1) respectivamente. Para

76
el caso analógico, la salida sólo corresponde con los pines PWM, es decir,
AD0 (pin 20) con PWM0 (pin 6) y AD1 (pin 19) con PWM1 (pin 7). Cabe
mencionar que DIO8 (ni DO8 ni DI8, pines 4 y 9 respectivamente) no puede
usarse como cable virtual.
2.2.3 Selección de componentes
A continuación se describirán los componentes que se emplearán en la
implementación del transmisor y del receptor.
a) Botonera de control
La botonera que se va a utilizar para la implementación del proyecto es como
la que se ilustra en la figura 2.7, ésta botonera es la misma con la que se
encuentra trabajando actualmente el puente grúa el cual tiene el mando
suspendido por cable, ésta botonera consta únicamente de seis botones para
el control de maniobras del puente.
Figura 2.7 Botonera de control

77
La botonera es de marca Telemecanique, a continuación se presenta las
características de este tipo de botonera.
Grado de protección IP67 según IEC 529.
Temperatura de servicio: de -25º + 70º.
Pasacables en goma con secciones variables.
Vida mecánica en pulsadores y selectores: 1 millón de maniobras.
Cajas en material termoplástico auto extinguible con doble aislamiento,
resistente a agentes externos como grasas, aceites y ambientes salinos.
b) Pulsador de Paro de Emergencia
El pulsador de emergencia que se utilizará en la implementación del proyecto
es un pulsador tipo hongo de marca WEG como se muestra en la Figura 2.8
Figura 2.8 Pulsador de Paro de emergencia

78
Las características del pulsador tipo hongo son las siguientes:
Pulsador con retención mecánica.
Posee 1 contacto NC y un contacto NA.
No posee luz piloto.
La función esencial del dispositivo de parada de emergencia es la de
interrumpir (en condiciones de peligro) el suministro de la fuente de
alimentación de energía y enviar al sistema una señal de emergencia para
detener el proceso lo más rápido posible.
Hay que tener en cuenta que este dispositivo debe ser instalado en un lugar
visible y debe ser de fácil accionamiento en caso de que se produzca una
condición de peligro durante las condiciones normales de trabajo.
c) El microcontrolador
La selección del microcontrolador es fundamental para el desarrollo del
proyecto ya que éste es el encargado de ejecutar todas las instrucciones y
acciones tanto para el circuito transmisor como para el circuito receptor, en
definitiva para que todo el sistema de control sea eficiente depende del
correcto funcionamiento del microcontrolador, y para su selección se tomo en
cuenta varios aspectos importantes:
La capacidad de memoria de programa.
Que sea capaz de manejar interrupciones tanto internas como
externas.
Que posea conversores análogo/digital.
Cantidad de entradas y salidas.
Puertos de comunicación serie USART.

79
El tamaño.
El bajo costo.
Que sea fácil de encontrar en el mercado.
Información y documentación fácil de acceder.
Por lo anterior se utilizo el microcontrolador PIC 16F876A de Microchip
(Figura 2.9), cuyas características se indican en el capítulo I.
Figura 2.9 Microcontrolador PIC16F876A
d) Optoacoplador 4N25
Los optoacopladores son conocidos como optoaisladores o dispositivos de
acoplamiento óptico, basan su funcionamiento en el empleo de un haz de
radiación luminoso para pasar señales de un circuito a otro sin conexión
eléctrica, para el desarrollo del proyecto se utilizo el optotransistor que se
muestra en la figura 2.10, el cual se compone de un optoacoplador con una
etapa de salida formada por un transistor.

80
Figura 2.10 Optoacoplador 4N25
La principal característica de este Optoacoplador es el aislamiento de alto
voltaje entre las entradas y salidas, además el ruido eléctrico que llega a las
entradas es aislado y no se permite su paso hacia la salida.
Las características técnicas de este Optoacoplador se muestran en el anexo B
e) Regulador LM7805
Se utilizaron reguladores de montaje superficial como es el caso del regulador
LM7805, como se puede apreciar en la figura 2.11 es un regulador pequeño
de 3 pines el cual entrega un voltaje de salida fijo de 5 Voltios DC y puede
entregar corrientes hasta de 1 Amperio; además, poseen una protección
contra sobrecargas térmicas y contra cortocircuitos, que desconectan el
regulador en caso de que su temperatura de juntura supere los 125°C.
Figura 2.11 Regulador LM7805

81
Este regulador se utiliza en la etapa encargada de proveer un voltaje
constante y fijo de 5 Voltios como por ejemplo para la polarización del
microcontrolador PIC16F876A.
Las características y dimensiones del regulador de montaje superficial
LM7805 se muestran en el anexo B.
f) Regulador LM317
El LM317, al igual que el LM7805, es de montaje superficial, como se muestra
en la figura 2.12 es un regulador sumamente pequeño de tres pines y a
diferencia del LM385 entrega un voltaje de salida variable cuyo rango varia
entre1.2 Voltios DC hasta 37 Voltios DC.
Figura 2.12 Regulador LM317
Las características y dimensiones del regulador LM317 de montaje superficial
se muestran en el anexo B.

82
g) Baterías recargables
Las baterías que se utilizaron para el transmisor son de Ni-Cd (Níquel-
Cadmio) de 1.2 V de 2300mA/H como las que se muestran en la figura 2.13.
Estas baterías puestas en serie son las encargadas de alimentar a toda la
etapa del transmisor.
Figura 2.13 Batería recargable de Ni-Cd
h) Relé
Los relés son elementos que están compuestos por un bobinado en su
extremo y contactos normalmente cerrados o abiertos, así al aplicar un voltaje
a dicho bobinado los contactos cambian de posición permitiendo activar o
desactivar otro nivel de voltaje independiente aislando el uno del otro.
Para el desarrollo del proyecto se seleccionó un relé de 12V como se puede
apreciar en la figura 2.14, cuyos contactos pueden controlar cargas que
manejan mucha más corriente como por ejemplo la activación de motores,
estos contactos pueden soportar voltajes de hasta 120VAC con una corriente
de 1A

83
Figura 2.14 Relé 12Vdc
i) Buffer de 3 estados
La característica principal de este buffer es la presencia de tres estados para
las salidas del dispositivo (0, 1 y alta impedancia). Este dispositivo como se
puede ver en la figura 2.15 posee seis entradas y seis salidas, además dos
entrada de habilitación para determinar un estado alto, bajo o alta impedancia
a las salidas del buffer.
Figura 2.15 Buffer de 3 estados
Las características técnicas del buffer se muestran en el anexo B.

84
2.2.4 Componentes para las seguridades del puente grúa
La selección de componentes para el control de ascenso del gancho y para el
control de sobre carga del puente son muy importantes; para ello se realizó un
estudio previo de los diferentes tipos y modelos existentes en el mercado ya que
de ellos depende que las cargas que se estén transportando se encuentren dentro
de los límites de seguridad establecidos disminuyendo el riesgo de accidentes
ocasionados por una posible ruptura del cable.
a) Sensor de sobre carga
Para determinar el peso o carga que está levantando el puente grúa se empleó
una celda de carga tipo S con una capacidad de 10.000 libras, como se puede ver
en la figura 2.16 éste sensor de carga mide la deformación que sufren las ramas
de un puente metálico que soporta un peso determinado, este puente metálico
está constituido por 4 galgas extensiométricas idénticas colocadas en las paredes
de la celda de carga formando un puente eléctrico equilibrado.
Figura 2.16 Celda de carga

85
Para el montaje, debe tenerse en cuenta la codificación de los colores de los
cables de la célula. Los colores de los cuatro cables activos son:
Rojo: Entrada Vcc
Negro: GND
Verde: Salida de la señal +
Blanco: Salida de la señal –
Las características técnicas de la celda de carga se muestran en el anexo B.
La señal que estrega la celda de carga en relación al peso que soporta es muy
pequeño, por lo que se utiliza un amplificador de instrumentación para
acondicionar dicha señal, la tarjeta del amplificador de instrumentación se
muestra en la figura 2.17.
Figura 2.17 Amplificador de instrumentación

86
b) Sensor final de carrera
El final de carrera de elevación giratorio como se puede ver en la figura 2.18
se utiliza para determinar cuando el gancho ha llegado a una posición de
elevación máxima, de tal manera que no pueda seguir elevando la carga
aunque se siga presionando el pulsador de elevación.
Este final de carrera contiene cuatro contactos que se utilizan para calibrar
hasta que altura puede subir el gancho y de igual manera podemos ajustar el
nivel inferior abriendo los contactos cuando llegan a una posición determinada.
.
Figura 2.18 Sensor final de carrera
Donde:
S1. Final de carrera de inspección de la secuencia de fases de elevación (o
final de carrera de elevación).
S2. Final de carrera de elevación superior.
S3. Final de carrera de retardo de elevación.
S4. Final de carrera de elevación inferior.

87
1. Contacto NC.
2. Contacto NO.
3. Contacto ordinario.
2.3 DISEÑO Y CONSTRUCCIÓN DEL HARDWARE PARA EL SISTEMA DE CONTROL
2.3.1 Diseño de la red inalámbrica
El diseño y construcción de la red inalámbrica se ha divido en dos partes, la
primera parte describe el diseño y construcción del transmisor y la segunda el
diseño y construcción del receptor.
2.3.1.1 Diseño del Transmisor
El transmisor está formado por la botonera y el circuito de control que recibe las
señales de la misma, contiene también al microcontrolador y al módulo XBee-Pro
para la comunicación; el diseño de la botonera y circuito de control se explican a
continuación.
a) Implementación de la botonera
Para el diseño del transmisor se necesita implementar una nueva botonera ya
que ésta es usada para el control del puente con mando suspendido por cable,
la que utiliza contactos muy grandes de dos posiciones para realizar las

88
acciones de maniobra del puente grúa, estos contactos serán reemplazados
por pequeños pulsadores como se muestra en la figura 2.19.
Figura 2.19 Pulsador utilizado para la botonera
Para el montaje de estos pulsadores se diseñó una placa cuyo diagrama
esquemático y PCB se muestra en el Anexo C.
La placa es atornillada a una base interna que posee la botonera como se
puede ver en la figura 2.20 de tal forma que quede firme y bien sujeta para que
al momento de realizar cualquier movimiento del puente, el pulsador de la
botonera tenga un buen contacto con el pulsador pequeño de la placa.

89
Figura 2.20 Montaje de pulsadores
Las activación de estos pulsadores pequeños serán los encargados de
realizar las acciones de maniobra del puente grúa, para ello estas señales
serán llevadas al circuito del transmisor por medio de un conector tipo bus
como se observa en la figura 2.20, éste conector irá también conectado a las
entradas del PIC 16F876A.
b) Diseño del circuito de transmisión
Las señales provenientes de los pulsadores colocados en la botonera se
conectan al puerto B del microcontrolador permitiendo ingresar un nivel lógico
en el momento en que se les acciona y pasando al nivel contrario cuando se
deja de hacerlo es decir retoman la posición inicial.
Conector
para cable
tipo bus

90
Los pulsadores necesitan de resistencias para limitar la corriente cuando se
les acciona, para el diseño se utiliza una conexión a 0 lógico y se definen los
siguientes parámetros.
Nivel de tensión 5Vdc
Corriente máxima de entrada al microcontrolador Iin_max = 25mA
Con estos datos y para que la corriente que ingresa al microcontrolador sea la
máxima permisible se tiene:
(2.1)
Con este valor de resistencia mínima se garantiza que se tenga un 1 lógico a la
entrada del microcontrolador cuando el pulsador ha sido presionado, para el
desarrollo del proyecto se utilizan resistencias de 330 .
El circuito de transmisión cuenta también con diodos de emisión de luz (LEDS)
para la visualización de alarmas; es decir para conocer el estado del relé
térmico de los motores de accionamiento, sensor de carga y sensor final de
carrera con el que estará equipado el puente grúa, se dispone además de un
led indicador del enlace de comunicación.
Estos leds son controlados desde los pines del puerto A del microcontrolador el
cual puede suministrar suficiente corriente para encender al led, para ello se

91
conecta a través de una resistencia limitadora de corriente como se puede ver
en la Figura 2.21
Figura 2.21 Cálculo de resistencia de limitación
Para el cálculo de la resistencia limitadora de corriente se utilizan los siguientes
parámetros:
Nivel de tensión 5Vdc.
Corriente máxima que consume el diodo led IFMAX = 60mA.
Corriente máxima entregada por el microcontrolador = 25mA.
Entonces la corriente que fluye por el diodo máxima será:
(2.2)
R L
LED2
PortA.0

92
La resistencia de limitación para cada diodo será la de mayor valor
normalizado, para la implementación se utilizan resistencias de 120Ω, con ello
se garantiza la protección del led.
Como se indicó antes, el microcontrolador PIC 16F876A es el encargado de la
parte de control y tiene la capacidad de comunicarse en forma serial con casi
cualquier periférico, gracias al módulo USART con el que cuentan, esto permite
una comunicación con los módulos XBee-Pro sin la necesidad de utilizar una
interfase adicional.
La conexión del microcontrolador con el módulo XBee-Pro en la etapa de
transmisión es simple; primeramente se regula el voltaje para el funcionamiento
del XBee-Pro y luego el pin de salida serial del microcontrolador (TX) se
conecta directamente al pin de entrada de datos del módulo XBee-Pro como se
puede observar en la figura 2.22 y 2.23 respectivamente.
Figura 2.22 Circuito regulador de tensión de 3.3Vdc

93
Figura 2.23 Conexión del microcontrolador al XBee-Pro
Como se puede apreciar en la figura 2.30 se utiliza un regulador de voltaje
LM317, el cual entrega un voltaje de salida de 3.3Vdc, este voltaje de salida
depende de los valores de R1 y R2. Los valores de resistencia se calculan en
base a la siguiente ecuación:
(Ec. 2.3)
Donde:
(Asumido)

94
Despejando R1 de la ecuación 2.3 se obtiene:
– (2.4)
Reemplazando los datos en la ecuación 2.4 se tiene:
Con este valor de resistencia se obtiene un voltaje máximo de polarización del
modulo XBee-Pro, por ello se escogió un valor de resistencia menor al
calculado para que el módulo no funcione con los valores máximos de
polarización, para el diseño se eligió una resistencia normalizada de 330Ω.
La tarjeta del transmisor como se aprecia en la figura 2.24 debe ir sujetada a la
parte posterior de la base metálica de la botonera de tal forma que no pueda
moverse al momento de realizar los movimientos del puente y además debe
estar aislada para que los componentes de la placa no puedan hacer ningún
contacto con la base metálica.

95
Figura 2.24 Tarjeta del transmisor
c) Diseño del cargador de batería
Para cargar las baterías es necesario suministrar una corriente constante
durante un cierto tiempo, dependiendo de la capacidad de las baterías. Lo
ideal es cargarlas con una intensidad constante de 0.1 x C durante 14 horas,
donde C es la capacitancia de la batería en mA/H.
Las baterías que se utilizan para el desarrollo del proyecto tienen una
capacidad de 2300mA/H (miliamperios/hora), por lo que la corriente de carga
debe ser de 230 mA. Si se desea cargar varias baterías al mismo tiempo,
simplemente se las conecta en serie, porque la misma corriente de carga
circulará a través de todas ellas; para ello se emplea un regulador de tensión
tipo LM317 como regulador de corriente como se puede ver en la figura 2.25.

96
Figura 2.25 Regulador de corriente constante
El valor de la resistencia R1 viene determinado por la intensidad que se desea
suministrar a la batería y según la siguiente tabla:
Tabla 2.3 Valores de resistencias recomendados para cargar baterías Ni-Cd
C [mA/h] R [Ω] Potencia [W] Tiempo de carga [h]
150 82 0.25 14-16
500 24 0.25 14-16
650 18 0.25 14-16
800 15 0.25 14-16
1100 11 0.25 14-16
1200 10 0.5 14-16
1300 9.1 0.5 14-16
1500 8.2 0.5 14-16
1600 7.5 0.5 14-16
1700 6.8 0.5 14-16
1800 6.2 0.5 14-16
2300 5.1 0.5 14-16
4300 2.7 1 14-16
5000 2.4 1 14-16
5700 2.15 1 14-16
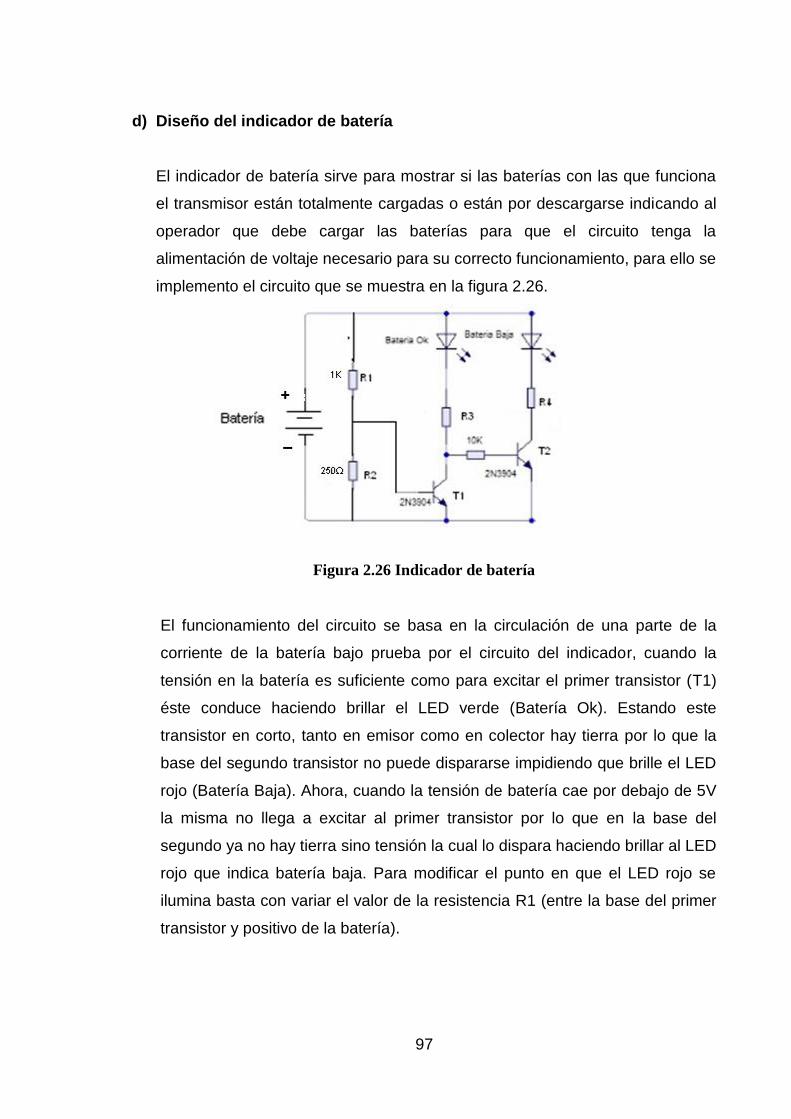
97
d) Diseño del indicador de batería
El indicador de batería sirve para mostrar si las baterías con las que funciona
el transmisor están totalmente cargadas o están por descargarse indicando al
operador que debe cargar las baterías para que el circuito tenga la
alimentación de voltaje necesario para su correcto funcionamiento, para ello se
implemento el circuito que se muestra en la figura 2.26.
Figura 2.26 Indicador de batería
El funcionamiento del circuito se basa en la circulación de una parte de la
corriente de la batería bajo prueba por el circuito del indicador, cuando la
tensión en la batería es suficiente como para excitar el primer transistor (T1)
éste conduce haciendo brillar el LED verde (Batería Ok). Estando este
transistor en corto, tanto en emisor como en colector hay tierra por lo que la
base del segundo transistor no puede dispararse impidiendo que brille el LED
rojo (Batería Baja). Ahora, cuando la tensión de batería cae por debajo de 5V
la misma no llega a excitar al primer transistor por lo que en la base del
segundo ya no hay tierra sino tensión la cual lo dispara haciendo brillar al LED
rojo que indica batería baja. Para modificar el punto en que el LED rojo se
ilumina basta con variar el valor de la resistencia R1 (entre la base del primer
transistor y positivo de la batería).
98
Toda la distribución de elementos de la tarjeta del transmisor se encuentra
representada en el diagrama esquemático, mientras que el diagrama PCB
muestra el diseño para la placa que forma el transmisor, esto se puede ver en
el Anexo C.
2.3.1.2 Diseño del Receptor
En el receptor se encuentran dos tipos de sensores; un sensor de carga, el cual
permite sensar la cantidad de carga que está levantando el puente grúa y un
sensor final de carrera, que detecta el movimiento de ascenso del gancho,
además un contacto normalmente cerrado para indicar el estado del relé térmico
de los motores.
Debido a que el sensor final de carrera y el contacto de los relés térmicos
funcionan con un voltaje superior al del microcontrolador es necesario
implementar un circuito de acoplamiento para que estas señales provenientes de
los sensores puedan ingresar a los puertos del microcontrolador evitando que se
introduzcan ruidos, picos de corriente elevados, que pueden distorsionar la
información de entrada o en el peor de los casos la destrucción del
microcontrolador.
Para lograr este objetivo se usa un opto transistor 4N25 el cual permite que la
señal del sensor no entre directamente al pin de uno de los puertos del
microcontrolador sino a través del mismo opto acoplador con el que se aísla la
señal del sensor con el microcontrolador esto se puede ver en la figura 2.27

99
Figura 2.27 Acoplamiento de la señal
Para el cálculo de las resistencias se define los siguientes parámetros.
Nivel de tensión de entrada 24Vdc
Nivel de tensión de salida 5Vdc
Corriente máxima por el diodo Imax = 10mA
Con estos datos el valor de R1 a la entrada del opto acoplador es:
(2.5)
La resistencia de entrada será la de mayor valor normalizado, con ello estará
limitada la corriente para proteger al opto acoplador, para el diseño se utilizó una
resistencia de 3.3KΩ.
La señal de la celda de carga, antes que ingrese al microcontrolador, debe ser
amplificada ya que entrega un valor de 3mV/V, esto expresa la sensibilidad de la
6
5
4
1
2
R1
R2
En
trad
a

100
celda, esto quiere decir que la tensión de salida de la celda ante un peso igual al
fondo de escala es de 3.0003mV por cada voltio de tensión continua con que se
alimente a la celda, ésta señal se amplifica por medio de un amplificador de
instrumentación cuya señal varía entre 0 Vdc y 5 Vdc dependiendo de la cantidad
de carga que esté sensando en ese momento la celda de carga.
Por otra parte el receptor al igual que el transmisor, utiliza al PIC 16F876A para el
control y al módulo XBee-Pro para la recepción y envío de datos, en el receptor
irá la etapa de regulación y la conexión entre el microcontrolador y el módulo
XBee-Pro, esto se puede observar en la figura 2.28.
Figura 2.28 Conexión para el circuito de recepción
Una vez que los datos provenientes de la botonera llegan al receptor, ingresan al
microcontrolador y dependiendo del dato que haya ingresado el microcontrolador
habilita una de sus salidas en el puerto B enviando de esta forma una señal de
activación a los transistores, los mismos que permiten la activación de los relés de
12 Vdc que se encuentran instalados en la placa como se puede apreciar en la
figura 2.29

101
Figura 2.29 Tarjeta para el receptor
Las señales de activación que salen del puerto B hacia los transistores pasan
previamente por un buffer de 3 estados, como se pudo ver en la selección de
componentes, éste dispositivo posee dos entradas de activación para permitir el
paso de las señales que llegan a sus entradas, estas señales de activación
dependen del estado en el que se encuentre el paro de emergencia dado por el
cable virtual y el enlace entre los módulos, esto quiere decir que el sistema
funcionará siempre y cuando los dos módulos se hayan enlazado correctamente
el uno con el otro y el paro de emergencia no esté activado, de este modo la
condición de emergencia no depende solamente del microcontrolador sino
también del módulo XBee-Pro.
La tarjeta del receptor va asegurada dentro de una caja metálica como se puede
apreciar en la figura 2.30.
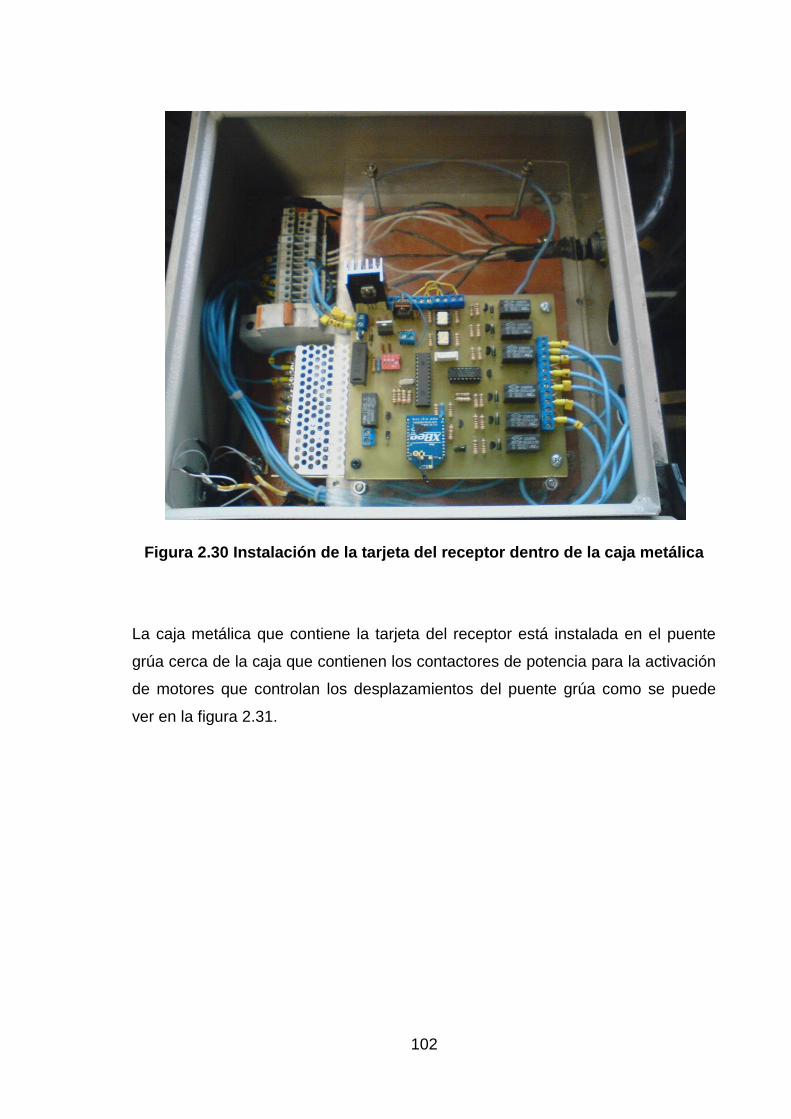
102
Figura 2.30 Instalación de la tarjeta del receptor dentro de la caja metálica
La caja metálica que contiene la tarjeta del receptor está instalada en el puente
grúa cerca de la caja que contienen los contactores de potencia para la activación
de motores que controlan los desplazamientos del puente grúa como se puede
ver en la figura 2.31.

103
Figura 2.32 Instalación del receptor
Toda la distribución de elementos para la tarjeta del receptor se encuentra en el
anexo C en donde se muestra el diagrama esquemático con su respectivo
diagrama PBC de la placa.
2.3.1.3 Diseño del amplificador de instrumentación
En la siguiente figura se muestra el diagrama esquemático del amplificador de
instrumentación el cual es muy utilizado para amplificar señales muy débiles como
por ejemplo en los electrocardiogramas y en muchas aplicaciones industriales.

104
Figura2.33 Diagrama esquemático del amplificador de instrumentación
La etapa más importante del circuito es el amplificador diferencial, que se encarga
de recibir la señal en modo diferencial proveniente de la celda de carga a través
de sus entradas IN+ e IN-, rechazar los posibles ruidos y amplificarla por un factor
fijo de 60, este valor se consigue mediante la siguiente fórmula:
(2.6)
Donde:
Rg=10K
Rs=20K
Rf=12K
Ri=1K

105
Reemplazando estos valores en la ecuación 2.6 se obtiene una ganancia de:
Una vez que la señal de la celda de carga se encuentra filtrada y preamplificada
por un factor de 60 se acopla a la siguiente etapa que es un amplificador no
inversor con ganancia variable y se encarga de amplificar la señal nuevamente
por un factor de 2.5, esto se obtiene a partir de la siguiente ecuación:
(2.7)
Donde:
Rb=10K
Ra=10K
P1=5K
Reemplazando en la ecuación 2.7 tenemos una ganancia de:

106
Al final se obtiene una ganancia total de 150 por lo que la celda de carga al
censar la carga máxima esta nos entregará una señal de 36mV la cual al ser
amplificada por el amplificador de instrumentación se obtendrá un valor de 5.4
voltios, el cual lo podemos regular utilizando el potenciómetro para obtener un
voltaje adecuado para ingresar al microcontrolador.
2.4 DISEÑO DEL SOFTWARE PARA EL SISTEMA DE CONTROL
Para la ejecución del programa de control se utiliza como plataforma de desarrollo
al software MICKOBASIC de la empresa mikroElectronika. Las características
más destacadas de este compilador es la inclusión de un entorno de desarrollo
integrado (IDE) que hace muy cómoda la programación, ya que resalta la sintaxis
del lenguaje, proporciona acceso muy rápido a la excelente ayuda incluida,
estadísticas sobre el uso de recursos del microcontrolador y muchas ventajas
más. Soporta muchos modelos de microcontroladores y además dispone de un
enorme grupo de librerías, divididas en comunicaciones RS-232, RS-485 e I2C;
teclados PS/2, conexiones USB, interfaz para LCD, etc.
Entre sus funciones encontramos:
Asistente de parámetros para rutinas.
Asistente de código avanzado.
Estadísticas detalladas.
Rutinas incorporadas.
Explorador de códigos.

107
2.4.1 Programa principal
A continuación se presenta la estructura del programa cargado en el
microcontrolador instalado en la tarjeta del transmisor mediante un diagrama de
flujo.
INICIO
Configuración
de puertos
Configuración
de variables
Retardo 500ms
1
Puente 1
Puente 2
SI
SI
NO
NO
SI
NOSi se selecciona un caso
diferente o incorrecto se
enciende y se apaga el puerto
A cada 200ms
Selección de
puente
Configuro el
parámetro
ATID=3332 en el
módulo XBee-Pro
Configuro el
parámetro
ATID=3333 en el
módulo XBee-Pro
PortA=15
Retardo 200m
PortA=0
Retardo 200ms

108
1
Port B.7=1
Envío de la
cadena
Port A.0=1
Retardo 1000ms
Port A.0=0
Retardo 150ms
NO
SI
Inicio cadena con
”S”
Fin cadena con
“A”
Dato recibido
=”1"
Dato recibido
=”3"
Dato recibido
=”5"
Dato recibido
=”9"
Port A.0=1
SI
NO
Port A.0=1
Port A.1=1
SI
NO
NO
NO
Port A.0=1
Port A.2=1
Port A.0=1
Port A.3=1
Recepción de
datosPort A=0
SI
NO
Port B cadena
Retardo 50ms
Port
B=%10000000
SI
NO
Port B cadena
Retardo 50ms
Inicio cadena con
”S”
Fin cadena con
“A”
Envío de la
cadena
Contador = 5NO SI Port
B=%10000000SI
NO
SI
SI
Figura 2.34 Diagrama de flujo del transmisor

109
En los siguientes diagramas de flujo se muestra el programa para la tarjeta del
receptor:
INICIO
Configuración
de puertos
Configuración
de variables
Retardo 500ms
1
Puente 1
Puente 2
SI
SI
NO
NO
SI
NO
Selección de
puente
Configuro el
parámetro
ATID=3332 en el
módulo XBee-Pro
Configuro el
parámetro
ATID=3333 en el
módulo XBee-Pro

110
1
Recepción de
datos
Inicio de la
cadena=”S”
Longitud de la
cadena=5
Fin de la
cadena=”A”
Incremento VAR3
VAR4=ADC
Lee el valor de la
celda de carga y lo
guarda en la
variable VAR4
VAR3=5
Sensor de los
relés térmicos
esta activado
Sensor final de
carrera esta
activado
NO
VAR4 < valor
máximo
NO
Port B= Dato
recibido
Activa el puerto B
dependiendo del dato
que haya llegado
Dato recibido=cadena
Envía el dato “1”
SI
Permite activar solo el
movimiento del gancho para
abajo
NO
Permite activar todos los
movimientos menos el
movimiento del gancho para
arriba
SI
No permite activar ningún
movimiento del puente grúa
SI
SI
SI
SI
SI
SI
Envía el dato “9”
Envía el dato “5”
Envía el dato “3”
NO
NO
NO
NO
NO
Figura 2.35 Diagrama de flujo del receptor

111
CAPÍTULO III
RESULTADOS Y PRUEBAS EXPERIMENTALES
3.1 DESCRIPCIÓN FÍSICA DEL SISTEMA DE CONTROL
En la empresa Novacero S.A. Planta Lasso operan puentes grúa con una
capacidad mínima de 10 toneladas los cuales son utilizados para realizar tareas
como transporte de matricería, montaje y desmontaje de maquinaria pesada,
tareas de mantenimiento, extracción de material de reproceso, embarque de
producto terminado, etc.
Dichos puentes pueden realizar seis movimientos o desplazamientos como son:
desplazamiento del puente hacia el norte y hacia el sur, desplazamiento del carro
hacia la izquierda y hacia la derecha, desplazamiento del gancho hacia arriba y
hacia abajo, cada uno de estos desplazamiento tiene una sola velocidad de
translación.
El sistema de control y seguridades para el puente grúa consiste en enviar
señales de control desde el transmisor hacia el receptor estableciendo una
comunicación full dúplex entre ellos, para el transmisor se utilizó una botonera con
seis pulsadores una para cada movimiento la misma que envía una señal al
microcontrolador cuando uno de ellos es presionado, el microcontrolador recibe
esta señal y la transmite al receptor por medio del módulo de radio frecuencia
XBee-Pro.

112
El receptor recibe estas señales por medio de otro módulo XBee-Pro y las
transmite en forma serial a otro microcontrolador el cual habilita sus salidas
dependiendo del tipo de dato que haya recibido, estas salidas cuando son
habilitadas permiten cerrar los contactos de potencia que se encuentran en la caja
de distribución del puente grúa activando unos motores de AC que permiten que
el puente pueda realizar cualquier movimiento.
Para el sistema de seguridad se implementó en la botonera un pulsador de paro
de emergencia el cual será activado cuando se produzca una condición de peligro
o riesgo deteniendo inmediatamente toda acción posible del puente.
En el receptor se encuentran los sensores para las seguridades del puente grúa,
estos sensores envían una señal al transmisor dependiendo del estado en el que
se encuentren, el estado de dichos sensores es visualizado por medio de leds que
se encuentran en la botonera indicando al operador si uno de ellos ha sido
activado.
3.2 PRUEBAS EXPERIMENTALES
Una vez realizada la instalación de las tarjetas tanto del transmisor como del
receptor en el puente grúa se ejecutaron las siguientes pruebas.
Prueba de monitoreo de datos.
Prueba de control inalámbrico.
Tiempo de respuesta para la activación de movimientos y paro de emergencia.
Prueba de protección para el puente grúa.

113
3.2.1 Prueba de monitoreo de datos
Esta prueba de monitoreo consiste en visualizar los datos enviados desde la
botonera hacia el receptor ubicado en el puente grúa y viceversa.
Los datos enviados desde la botonera dependerán de qué movimiento se realice
en ese momento, estos datos pueden ser visualizados por medio de una pantalla
terminal que posee el software XCTU, la cual se muestra en la figura 3.1.
Figura 3.1 Datos enviados desde el transmisor
Como se mencionó anteriormente la botonera posee un pulsador de paro de
emergencia para detener toda acción posible del puente, el envío de esta señal
de control se puede observar en la figura 3.2

114
Figura 3.2 Datos enviados al presionar el paro de emergencia
En la figura 3.2 se puede apreciar la trama enviada al presionar el paro de
emergencia, una vez configurado el cable virtual el módulo transmitirá siempre la
misma trama cuando se presione el paro de emergencia, la información
recuperada en un módulo del receptor sería la siguiente:
7E: inicio de trama
00 0A: longitud de datos (10 bytes a continuación, más uno de checksum)
83: recepción de datos de I/O
56 78: dirección de quien envía
24: RSSI (nivel de recepción)
00: opciones
01: cantidad de muestras
00 01: canales habilitados (D0)
00 00: estado de I/O
88: checksum

115
Para el desarrollo de este proyecto se estableció una comunicación Full dúplex
por lo que el receptor también puede enviar datos al transmisor, estos datos
dependen del estado de los sensores que forman parte de las seguridades del
puente grúa, el envío de estos datos se puede observar en la figura 3.3
Figura 3.3 Datos enviados desde el receptor
En la figura anterior se muestran los datos enviados desde el receptor hacia la
botonera, los datos que se encuentran en el recuadro de color azul corresponden
al dato “1” y representa el enlace entre los módulos, los datos en el recuadro de
color verde pertenecen al sensor de carga el cual envía el dato “3” cuando el
sensor haya sido activado, en el recuadro color lila se envía el dato “5” que
corresponde al sensor final de carrera y en el recuadro color café se encuentran
los datos cuando el relé térmico de los motores se ha activado.
3.2.2 Pruebas del control inalámbrico
Los puentes grúa operan en un área de trabajo donde existe mucho ruido y
mucha interferencia provocada por los equipos que funcionan a su alrededor y
sometidos a estas condiciones de trabajo la respuesta de los módulos se puede
apreciar en la tabla 3.1.

116
Tabla 3.1 Prueba de transmisión y recepción
Módulos
XBee-Pro
Velocidad de
transmisión
Distancia
(m)
Línea de vista con la caja metálica
Recepción de datos
Módulo del transmisor dentro de la botonera y el módulo del receptor dentro de una caja metálica
2400
5 SI Muy buena
NO Muy buena
10 SI Muy buena
NO Muy buena
20 SI Muy buena
NO Muy buena
30 SI Muy buena
NO Muy buena
4800
5 SI Muy buena
NO Muy buena
10 SI Muy buena
NO Muy buena
20 SI Muy buena
NO Muy buena
30 SI Muy buena
NO Muy buena
9600
5 SI Muy buena
NO Muy buena
10 SI Muy buena
NO Muy buena
20 SI Muy buena
NO Muy buena
30 SI Muy buena
NO Muy buena

117
3.2.3 Tiempo de respuesta para la activación de movimientos y paro de
emergencia
El tiempo de respuesta para la activación de los motores se puede apreciar en la
tabla 3.2 y el tiempo de respuesta del paro de emergencia en la tabla 3.3.
Tabla 3.2 Tiempo de respuesta para los movimientos del puente grúa
Distancia Movimiento del
puente grúa
Número de veces
presionado
Tiempo de respuesta
Funcionamiento del sistema
5 – 30 m
Movimiento del puente hacia arriba
10 Rápido OK
Movimiento del puente hacia abajo
10 Rápido OK
Movimiento del puente hacia el este
10 Rápido OK
Movimiento del puente hacia el oeste
10 Rápido OK
Movimiento del gancho hacia arriba
10 Rápido OK
Movimiento del gancho hacia abajo
10 Rápido OK
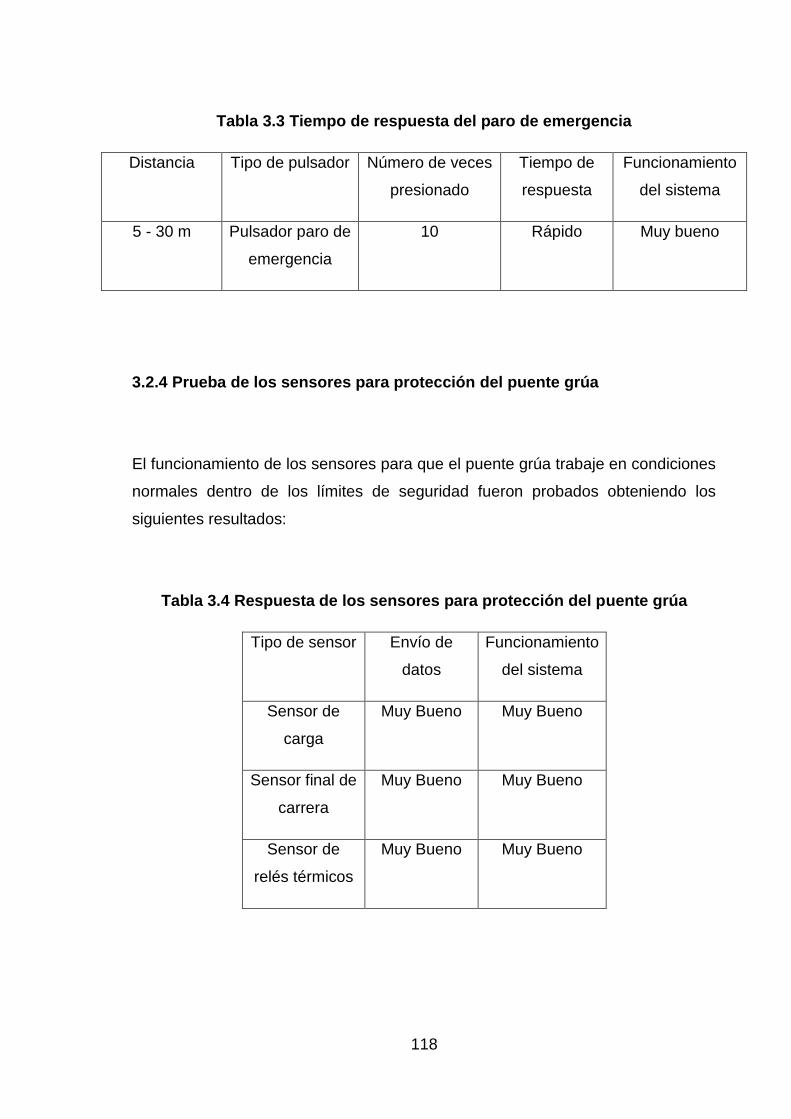
118
Tabla 3.3 Tiempo de respuesta del paro de emergencia
Distancia Tipo de pulsador Número de veces
presionado
Tiempo de
respuesta
Funcionamiento
del sistema
5 - 30 m Pulsador paro de
emergencia
10 Rápido Muy bueno
3.2.4 Prueba de los sensores para protección del puente grúa
El funcionamiento de los sensores para que el puente grúa trabaje en condiciones
normales dentro de los límites de seguridad fueron probados obteniendo los
siguientes resultados:
Tabla 3.4 Respuesta de los sensores para protección del puente grúa
Tipo de sensor Envío de
datos
Funcionamiento
del sistema
Sensor de
carga
Muy Bueno Muy Bueno
Sensor final de
carrera
Muy Bueno Muy Bueno
Sensor de
relés térmicos
Muy Bueno Muy Bueno

119
3.3 ANÁLISIS DE PRUEBAS EXPERIMENTALES
Todo proyecto de investigación y diseño debe ser sometido a una evaluación de
resultados, ésta evaluación se realizó en base a los resultados obtenidos en la
sección 3.2.
3.3.1 Análisis del monitoreo de datos
Como se pudo apreciar en la primera prueba realizada, la cual consistió en el
monitoreo de datos, en el primer caso las tramas provenientes de la botonera son
completas es decir no se produce pérdida de información ni interferencia de la
señal, ni tampoco se introducen basuras en las tramas que puedan afectar la
lectura de datos por parte del receptor.
Para el segundo caso cuando el receptor envía los datos hacia la botonera se
pudo observar que los datos son completos y tampoco sufren ningún tipo de
interferencia ni pérdida de datos que afecten la lectura de información por parte
del transmisor, dependiendo del dato que llegue al transmisor se activará un led
indicador que será visualizado en la botonera por el operador.
En el caso cuando se presiona el paro de emergencia la trama enviada hacia el
receptor es totalmente transparente a los datos enviados correspondientes a los
movimientos del puente grúa.

120
3.3.2 Análisis del funcionamiento del control inalámbrico
Después de haber sido sometida a la segunda prueba, el control inalámbrico del
puente grúa es muy bueno y como se pudo apreciar en la tabla 3.1 el sistema de
control fue probado con los módulos dentro de la botonera en el caso del
transmisor y el receptor dentro de una caja metálica, a diferentes velocidades de
transmisión, con línea de vista y sin línea de vista con la caja del receptor y a
diferentes distancias, observando que el funcionamiento del control inalámbrico es
muy bueno y el enlace entre uno y otro módulo es el correcto.
3.3.3 Análisis del tiempo de respuesta para la activación de movimientos y
paro de emergencia
Según los datos de la tabla 3.2 el funcionamiento del sistema es muy bueno y los
tiempos de respuesta para la activación y desactivación de los motores para los
desplazamientos del puente grúa y paro de emergencia son muy rápidos y por
cuestiones de seguridad la distancia a la que fueron probados los módulos fue
sólo hasta los 30 m, debido a que el operador no puede separarse mucho de la
carga que está transportando.
3.3.4 Análisis de respuesta de los sensores para el puente grúa
En la tabla 3.4 se pudo observar que la respuesta de los sensores de protección
para el puente grúa funcionan correctamente, estos datos son enviados al
transmisor para ser visualizados en la botonera y permitiendo realizar sólo los
movimientos programados para cuando cada uno de los sensores sean activados,

121
es decir cuando el sensor de carga se activa permite realizar sólo el movimiento
para desplazar el gancho hacia abajo y ningún otro, cuando el sensor final de
carrera se activa permite realizar todos los movimientos menos el movimiento
para subir el gancho y cuando los relés térmicos de los motores se han activado
no permite al puente realizar ningún movimiento.
3.4 ALCANCES Y LIMITACIONES
3.4.1 Alcances
El proyecto desarrollado permite realizar las siguientes funciones:
Realizar un control inalámbrico no sólo para un puente grúa sino para varios
con una sola botonera.
Permite monitorear el estado de los sensores de seguridades del puente grúa
como son el sensor de carga, final de carrera y relés térmicos de los motores
de accionamiento del puente grúa y visualizarlos en la botonera por medio de
leds, indicando al operador cuál de los sensores ha sido activado.
Permite visualizar por medio de un led en la botonera el enlace entre el
transmisor y el receptor.
El sistema de control cuenta con un pulsador de paro de emergencia para
bloquear toda acción posible en caso de peligro o riesgo.
122
La botonera de control cuenta también con un indicador para saber el estado
en que se encuentra la batería con la que funciona la tarjeta del transmisor,
permitiendo observar mediante un led si la batería está descargada.
La botonera posee un cargador de batería dentro de la misma, de esta forma
el operador no tiene por qué abrir la botonera para sacar la batería y
cambiarlas, evitando de esta forma que se introduzcan elementos que puedan
afectar el buen funcionamiento del transmisor o la manipulación de la tarjeta
por personal no capacitado para ello.
3.4.2 Limitaciones
Este sistema permite seleccionar hasta un máximo de 4 puentes grúa para
realizar el control inalámbrico con una sola botonera.
El sistema cuenta con la protección de final de carrera únicamente para el
movimiento de ascenso del gancho y no cuenta para los demás
movimientos.
Los movimientos del puente grúa sólo pueden desplazarse a una sola
velocidad debido a que la botonera no cuenta con pulsadores de 2
posiciones.
3.5 ANALISIS TÉCNICO – ECONÓMICO
Desde el punto de vista técnico una vez realizada las pruebas correspondientes y
la implementación del proyecto cumple con los objetivos propuestos por los

123
usuarios, sin embargo es necesario también detallar los elementos con sus
costos.
En la tabla 3.5 se detalla por ítems el costo de los componentes.
Tabla 3.5 Descripción de los elementos empleados en el proyecto
Columna1 Columna2 Columna3 Columna4 Columna5
Item Descripción Cant Costo Uni. Sub total
(USD) (USD)
1 Amplificador operacional 2 1,25 2,50
2 Batería de 2300mA 6 1,80 10,80
3 Borneras pequeñas 20 0,15 3,00
4 Botonera Telemecanique 6 pulsadores 1 30,00 30,00
5 Buffer de 3 estados 6 2,50 15,00
6 Cable Plano 5m 1 1,25 1,25
7 Caja metálica 30x40x30 1 35,00 35,00
8 Celda de carga 10.000 libras 1 480,00 480,00
9 Conectores tipo bus 6 0,25 1,50
10 Diodos 1N4007 10 0,05 0,50
11 Diodos led 3mm 5 0,10 0,50
12 Dip switch 4 posiciones 3 0,50 1,50
13 Disipador de potencia 3 0,75 2,25
14 Espadines doble fila 2 0,25 0,50
15 Fuente de 24 Vdc 1 34,00 34,00
16 Fusible 1A 10 0,05 0,50
17 Kit de desarrollo MaxStream 1 250,00 250,00
18 Módulos Xbee-Pro 4 50,00 200,00
19 Optoacoplador 4N25 5 0,20 1,00
20 Oscilador 4MHz 4 0,15 0,60
21 Papel Press en pil 5 4,00 20,00
22 PIC 16F876A 4 15,00 60,00
23 Placa de fibra de vidrio 2 8,00 16,00
24 Plancha de mica 15x30 1 10,00 10,00

124
25 Porta fusible 4 1,00 4,00
26 Pulsador paro de emergencia 3 4,00 12,00
27 Regulador de montaje superficial LM317 6 1,75 10,50
28 Regulador de montaje superficial LM7805 6 1,50 9,00
29 Regulador LM317 2 0,85 1,70
30 Regulador LM7805 2 0,85 1,70
31 Regulador LM7812 2 0,85 1,70
32 Regulador LM7912 2 0,85 1,70
33 Relés de 12 Vdc 8 1,75 14,00
34 Resistencias 1/2 W 60 0,06 3,60
35 Switch de palanca 2 1,00 2,00
36 Transformador 110V/24V 1 25,00 25,00
37 Transformador 220V/110V 1 55,00 55,00
38 Transistores 2N222A 10 0,15 1,50
39 Zócalo de 28 pines 4 0,25 1,00
40 Zócalos para Xbee-Pro 10 1,00 10,00
TOTAL
1330,80
Después de haber detallado el costo de los elementos para el desarrollo del
proyecto se puede concluir que la realización y construcción resulta muy
conveniente ya que el costo de todo el sistema de control inalámbrico resulta más
económico que otros sistemas disponibles en el mercado, cabe mencionar que
éste sistema de control a diferencia de otros cuenta con un sistema de sobre
carga para el puente grúa, por lo que la adquisición de la celda de carga resulta
un poco costosa y dependiendo de los usuario se puede o no implementada ésta
seguridad en el puente grúa.

125
CAPÍTULO IV
CONCLUSIONES Y RECOMENDACIONES
4.1 CONCLUSIONES
Al finalizar el proyecto “DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE
CONTROL Y SEGURIDAD BASADO EN UNA RED INALÁMBRICA Y
MICROCONTROLADORES PARA PUENTES GRÚA” y una vez comprobada
su operación, se puede afirmar que se ha cumplido con los objetivos
planteados al inicio del mismo.
La principal aplicación de ZigBee son los sistemas para redes domóticas, pues
ha sido creado para cubrir las necesidades del mercado en este campo, sin
embargo, ZigBee tiene amplias capacidades de desarrollo que le permite ser
utilizado en múltiples aplicaciones.
ZigBee tiene muchas ventajas en sus aplicaciones pero no es muy utilizada
debido a que ésta tecnología es desconocida en el medio a pesar de existir
hace algún tiempo, también porque no es compatible con otras tecnologías
como bluetooth.
Se comprobó que los módulos de radio frecuencia XBee-Pro presentan gran
confiabilidad para aplicaciones inalámbricas, donde el ambiente de trabajo es
muy ruidoso y existe mucha interferencia.

126
El voltaje de alimentación entregado por la batería en el transmisor debe ser
igual o mayor a los 4 VDC para el correcto funcionamiento de la tarjeta, caso
contrario la tarjeta no tendría la suficiente corriente para enviar los datos al
receptor.
Los resultados obtenidos en la aplicación permiten afirmar que el sistema de
control inalámbrico diseñado se ajusta a la demanda de un sistema industrial,
ya que este permite lograr un buen enlace entre módulos, un tiempo de
respuesta rápido y no se sufre pérdidas de información.
Se analizó que la implementación de un sistema inalámbrico proporciona gran
flexibilidad en tareas de control y seguridad, ya que evita el uso de sistemas
con medios guiados, reduciendo costos y riesgos para el personal.
Se comprobó que los resultados que se obtiene al comunicar 2
microcontroladores serialmente mediante una conexión eléctrica física (cable)
y mediante los módulos de comunicación inalámbricos son los mismos y no se
presenta pérdida de los datos.
Se comprobó también el correcto funcionamiento de los sensores de
protección para que el puente grúa funcione dentro de los limites de seguridad
establecidos.
Se verificó que la duración de las baterías es de aproximadamente 14 horas
con un funcionamiento continuo del puente grúa, por lo que no hay
inconvenientes para que el operario realice su trabajo.

127
Al iniciar el funcionamiento del control inalámbrico se comprobó que el alcance
entre el transmisor y el receptor es de aproximadamente 60 m con línea de
vista.
La implementación y construcción de éste sistema de control inalámbrico para
puentes grúa resulta muy económico a comparación de otros sistemas
disponibles en el mercado, lo que representa para la empresa un ahorro de
capital.
Después de la implementación del control inalámbrico para el puente grúa, la
empresa quedo conforme con el funcionamiento del mismo, por lo que el
prototipo desarrollado servirá para ser implementado en otros puentes grúa de
la empresa.
4.2 RECOMENDACIONES
Antes de que entre en funcionamiento el puente grúa se debe observar que el
dip Switch para la selección del puente grúa esté en la posición correcta tanto
en el transmisor como en el receptor.
Al momento de encender la botonera verificar que el led indicador de batería
baja no esté prendido, ya que si se trabaja en estas condiciones el puente
grúa no funcionará o podría dejar activado un movimiento no deseado,
pudiendo causar accidentes.
Se recomienda dejar cargando las baterías por un tiempo de
aproximadamente 10 a 12 horas para que estas puedan recargarse
completamente.

128
Tener mucho cuidado de no dejar la botonera en lugares donde exista agua,
aceite o grasa que puedan ingresar dentro de ésta y dañar la tarjeta.
Si el operador observa que el funcionamiento del puente grúa es irregular
comunicar de inmediato al departamento eléctrico para su verificación.
La botonera no deberá ser abierta por personal que no esté capacitado para
hacerlo, ya que la manipulación incorrecta de los elementos dentro de la
botonera podría dañar permanentemente la tarjeta del transmisor.
Antes de que el puente grúa entre en funcionamiento el operador debe
verificar que el led indicador del enlace (led color azul) entre los módulos esté
encendido al momento de presionar un botón para poder continuar con su
operación.
En caso de que el sistema se salga de control o exista una condición de
peligro el operador del puente grúa debe presionar inmediatamente el paro de
emergencia que se encuentra en la botonera para detener el accionar del
puente grúa.
Si el operador va a realizar otra actividad donde considere que se va a
demorar un cierto tiempo es recomendable apagar la botonera para que no se
consuma la batería y al momento que necesite nuevamente el puente grúa
volver a prenderla, observando previamente el enlace entre los módulos antes
de su funcionamiento.

129
El operador debe operar el puente grúa a una distancia no mayor a los 15
metros ya que si el control lo hace a una distancia mayor no podrá tener
contacto visual con la carga que está llevando y provocar accidentes o
choques con otros objetos que se encuentren en el lugar de trabajo.
Se recomienda que al momento de utilizar el puente grúa el operador debe
llevar la botonera, de tal forma que la parte superior de ésta vaya dirigida hacia
arriba y no hacia abajo, para que la señal llegue fácilmente al receptor.
130
BIBLIOGRAFÍA Y ENLACES
1. ZigBee Alliance Web site
http://www.zigbee.org/en/
2. El Zumbido de las Abejas, ZIGBEE
http://www.osiriszig.com/content.aspx?co=15&t=21&c=2
3. ZigBee (especificación)
http://es.wikipedia.org/wiki/ZigBee_(especificaci%C3%B3n)
4. ZigBee Characteristics (Características Zigbee)
http://www.tutorial-reports.com/wireless/zigbee/zigbee-characterstics.php
5. BlueTooth_Zigbee (PDF)
http://www.acis.org.co/memorias/JornadasTelematica/IIJNT/BlueTooth_Zig
bee.pdf
6. http://www.rogercom.com/ZigBee/ZigBee.htm
7. http://www.monografias.com/trabajos16/comunicacion-inaalambrica/comunicacion-inalambrica.shtml
8. http://www.fing.edu.uy/[email protected]
9. http://spanish.bluetooth.com/Bluetooth/Technology/Works/Compare/
10. http://www.seccperu.org/files/ZigBee.pdf
11. http://ocw.upm.es/tecnologiaelectronica/microprocesadores/contenidos/Arc
hivos_Semana_1/introduccion_a_los_ microcontroladores.pdf
12. http://www.prodigyweb.net.mx/saucedo8/sci.pdf

1
ANEXO A
GLOSARIO DE TÉRMINOS
A
Asíncrono
Literalmente, no sincronizado. Se suele utilizar para referirse a comunicaciones en
las que el flujo de datos no va unido a una señal específica de reloj.
B
Banda ISM
Banda Industrial, Científica y Médica, un conjunto de frecuencias radio centradas
en los 2.4 GHz que son de uso público libre en todo el mundo por dispositivos
inalámbricos como los Bluetooth.
Botonera
Control de mando por cable o remoto con pulsadores de dos estados.
C
Contactor
Un contactor es un dispositivo con capacidad de cortar la corriente eléctrica de un receptor o instalación con la posibilidad de ser accionado a distancia, que tiene dos posiciones de funcionamiento: una estable o de reposo, cuando no

1
recibe acción alguna por parte del circuito de mando y otra inestable, cuando
actúa dicha acción.
I
Infrarrojo
Es un tipo de radiación electromagnética de mayor longitud de onda que la luz
visible, pero menor que la de las microondas. Consecuentemente, tiene menor
frecuencia que la luz visible y mayor que las microondas.
IrDA
Siglas de la Asociación de Datos por Infrarrojos, grupo de empresas cuyo nombre
se ha convertido en sinónimo del estándar que desarrollaron para comunicaciones
basadas en infrarrojos, que ha sido adoptado plenamente en la industria
informática pero no en dispositivos de consumo como los mandos a distancia.
Izar
Se refiere a la acción de subir o levantar un objeto tirando de un cabo del que está
suspendido una carga.

2
M
Mando por radio
Un mando a distancia o control remoto; es un circuito electrónico usado para
realizar una operación remota sobre una máquina.
Motor
Un motor es una máquina capaz de transformar la energía almacenada en
combustibles, baterías u otras fuentes en energía mecánica capaz de realizar un
trabajo.
P
Polipasto
Es un sistema de poleas compuesto de dos grupos, uno fijo y otro móvil. Se
emplea en la elevación o movimiento de cargas siempre que queramos realizar un
esfuerzo menor que el que tendría que hacer levantando a pulso el objeto.
Puente grúa
Los Puentes-Grúa son máquinas para elevación y transporte de materiales, tanto
en interior como en exterior, de uso muy común tanto en almacenes industriales,
como talleres. Básicamente, se trata de una estructura elevada formada por una o
varias vigas metálicas, con un sistema de desplazamiento de 4 ruedas sobre
rieles laterales, movidos por uno o más motores eléctricos, con un sistema
elevador central mediante polipasto y gancho.

3
R
Radiofrecuencia
El término radiofrecuencia, también denominado espectro de radiofrecuencia o
RF, se aplica a la porción del espectro electromagnético en el que se pueden
generar ondas electromagnéticas aplicando corriente alterna a una antena.
S
Síncrono
Flujo de datos que se transmite asociado y a la velocidad de una señal de reloj
por ejemplo en las líneas dedicadas.
Sistemas inalámbricos
Son los diferentes sistemas de medios no guiados para enviar y recibir datos,
ejemplo: los infrarrojos, radiofrecuencia, etc.
T
Testeros
Vigas laterales del edificio donde van apoyadas las vigas principales.

1
ANEXO B
HOJAS DE ESPECIFICACIONES TÉCNICAS

2
Modulo XBee-Pro

3

4

5

6
PIC 16F876A

7

8

9

10
OPTOACOPLADOR 4N25

11

12

13

14
REGULADOR LM7805

15

16

17

18
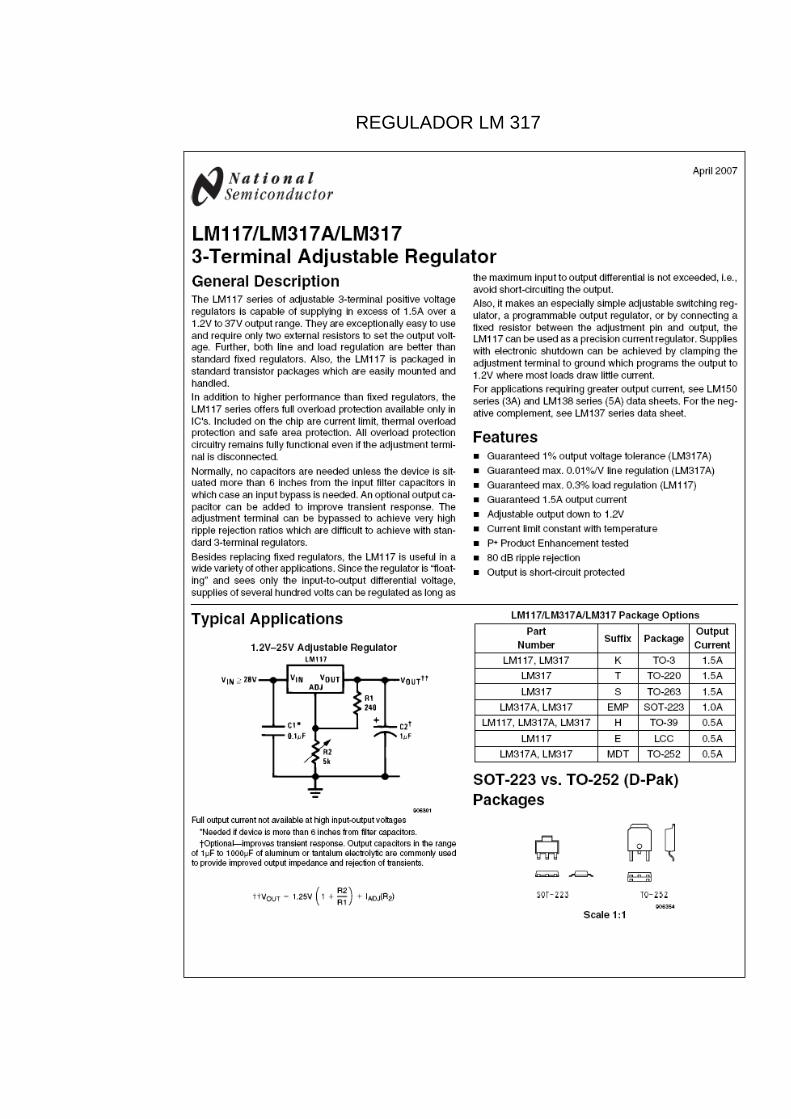
19
REGULADOR LM 317
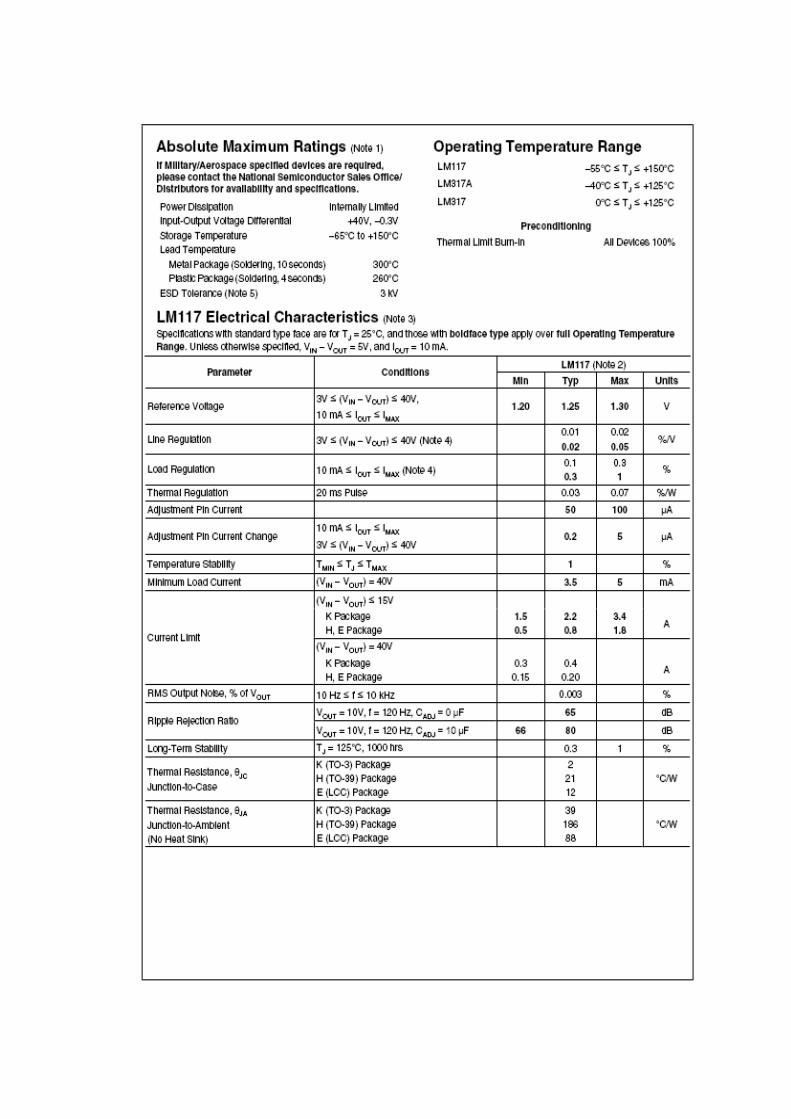
20

21

22
BUFFER DE 3 ESTADOS

23

24
CELDA DE CARGA

1
ANEXO C
DIAGRAMAS ESQUEMÁTICOS Y PLACAS DE CIRCUITO IMPRESO
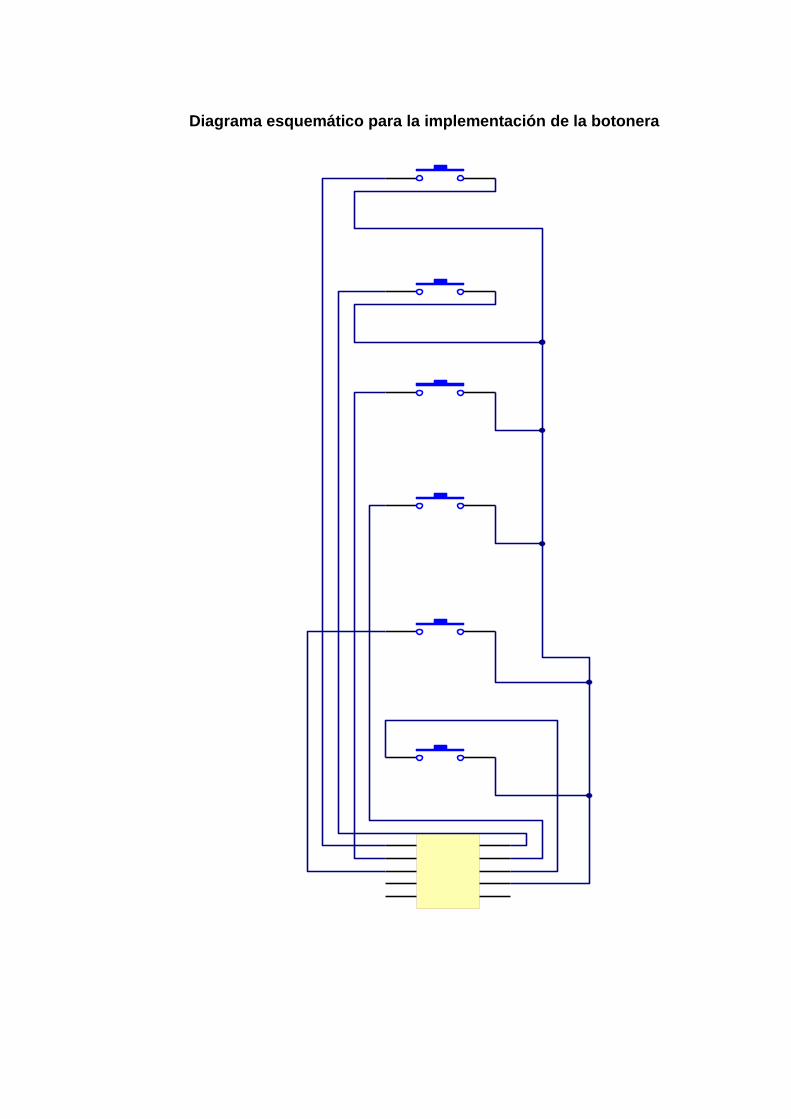
2
Diagrama esquemático para la implementación de la botonera
Pulsador 2
Pulsador 3
Pulsador 4
Pulsador 5
Pulsador 6
Pulsador 1
1 2
3 4
5 6
7 8
9 1 0
BUS_PULSADORES

3
PCB para la implementación de la botonera
1
2
4
3
3
4
2
1
1
2
4
3
3
4
2
1
1
2
4
3
3
4
2
1
1
2
3 5
6
7
8
9
104

1
RA0/AN0
2
RA1/AN1
3
RA2/AN2/VREF-/CVREF
4
RA3/AN3/VREF+
5
RA4/T0CKI/C1OUT
6
RA5/AN4/SS/C2OUT
7
RB0/INT
2 1
R B 1
2 2
R B 2
2 3
RB3/PGM
2 4
R B 4
2 5
R B 5
2 6
RB6/PGC
2 7
RB7/PGD
2 8
RC0/T1OSO/T1CKI
1 1
RC1/T1OSI/CCP2
1 2
RC2/CCP1
1 3
RC3/SCK/SCL
1 4
RC4/SDI/SDA
1 5
RC5/SDO
1 6
RC6/TX/CK
1 7
RC7/RX/DT
1 8
VSS
8
VSS
1 9
MCLR/VPP
1
OSC1/CLKI
9
OSC2/CLKO
1 0
V D D
2 0
PIC TX
PIC16F876A-E/SP
1
2
Y ?
XTAL
1
2
3
Bateria
Header 3
1 0 0 p F
C 1
Cap2
1 0 0 p F
C 2
Cap2
I N
3
1
O U T
2
A D J
LM317
I N
1
2
O U T
3
G N D
LM7805
LM7805CT
1 K
R 1
1 K
R 2
1 K
R 3
1 K
R 4
1 K
R 5
1 K
R 8
R12
3 3 0 R
R13
3 3 0 R
R11
3 3 0 R
R10
3 3 0 R
3.3Vdc
1 0 K
R 9
1 0 0 p F
C 3
Cap2
1 0 0 p F
C 4
Cap2
1 K
R14
2 2 0 R
3 3 0 R
R15
1 0 0 p F
C 5
Cap2
1 0 0 p F
C 6
Cap2
G N D
1
2
3
4
5
6
7
8
9
1 0
BUS BOTONERA
Header 5X2A
VCC
VCC
VCC
1 K
R 6
1 K
R 7
1 K
R20
2 5 6 R
R21
T 1
2N3904
D 1
Diode 1N914
D 2
Diode 1N914
4 0 0 R
R22
1 0 K
R23
T 2
2N3904
4 0 0 R
R24
VCC1
VCC1
VCC1
VCC
VCC
R16
1 0 K
R17
2 0 K
1
2
3
4
5
6
7
8
Selec_Puente
Header 4X2A
1
2
3
4
5
6
7
8
Indicadores
Header 4X2A
R18
1 0 K
R19
2 0 K
R25
2 2 0 R
R26
2 2 0 R
R27
2 2 0 R
R28
2 2 0 R
123
JP1
1
2
PARO_EMER
1
2
ON-OFF
P_28
P_28
I N
3
1
O U T
2
A D J
LM317_C
LM317AT
Q ?
2N3904
R30
4 0 0 R
R29
1 2 R
1
2
Bat
Header 2H
1 2
Led
Header 2H
1
2
Cargador
Header 2H
D 3
Diode 1N4007
12345
ICSP
P_27
P_1
VCCP_1
1
2
3
4
5
6
7
8
9
1 0
1
Header 10H
1
2
3
4
5
6
7
8
9
1 0
2
Header 10H
Diagrama esquemático para el diseño del transmisor

2
PCB para el diseño del transmisor
6
7
7
6
6
7
21
1
2
3
4
5
6
7
8
9
10
20
19
18
17
16
15
14
13
12
11
15
16
17
18
19
20
21
22
23
24
25
26
27
28
14
13
12
11
10
9
8
7
6
5
4
3
2
1
4
1 32
10
7
5
4
3
2
16
8
9
1
2
1
2
3
3 2 1
1 2 3 4
8 7 6 5
1
2
1
2
2 1
2 1
2 1
1 2
2
1
1
21
2 1
2
1
2
1 2
21
2
1
1
2
1
2
1
2
21
21
21
21
1 2
12
12
2 1
12
12
12
12
2 1
1 2 3
1 2 3
1
2
3
4
5
12
1
2
3
4
5
6
7
8
1
2
1
2 2
1
21
2
1
2
12
1 2
1
2 1
12
2
1
1 2
1
22
1

3
RA0/AN0
2
RA1/AN1
3
RA2/AN2/VREF-/CVREF
4
RA3/AN3/VREF+
5
RA4/T0CKI/C1OUT
6
RA5/AN4/SS/C2OUT
7
RB0/INT
2 1
R B 1
2 2
R B 2
2 3
RB3/PGM
2 4
R B 4
2 5
R B 5
2 6
RB6/PGC
2 7
RB7/PGD
2 8
RC0/T1OSO/T1CKI
1 1
RC1/T1OSI/CCP2
1 2
RC2/CCP1
1 3
RC3/SCK/SCL
1 4
RC4/SDI/SDA
1 5
RC5/SDO
1 6
RC6/TX/CK
1 7
RC7/RX/DT
1 8
VSS
8
VSS
1 9
MCLR/VPP
1
OSC1/CLKI
9
OSC2/CLKO
1 0
V D D
2 0
PIC TX
PIC16F876A-E/SP
T 2
2N3904
T 3
2N3904
T 4
2N3904
T 5
2N3904
T 6
2N3904
T 1
2N3904
1 0 K
R 1
1 0 K
R 4
R 5
1 0 K
R 6
1 0 K
R 3
1 0 K
R 2
1 0 K
D 1
Diode 1N4007
D 2
Diode 1N4007
D 3
Diode 1N4007
D 4
Diode 1N4007
D 5
Diode 1N4007
D 6
Diode 1N4007
rele3
rele4
rele5
rele6
rele2
Rele1
1 0 K
R 9
12
Y 1
XTAL
1
2
3
4
5
6
7
8
9
1 0
1 1
1 2
1 3
1 4
1 5
1 6
1 7
1 8
1 9
2 0
2 1
2 2
2 3
2 4
P 1
Header 24
1
2
3
24VDC
Header 3
I N
1
2
O U T
3
G N D
LM7805
LM7805CT
1 0 0 p F
C 5
Cap2
1 0 0 p F
C 6
Cap2
12VCC
1 0 0 p F
C 1
Cap2
1 0 0 p F
C 2
Cap2
5VCC
5VCC
24VCC
12VCC
I N
3
1
O U T
2
A D J
LM3171
LM317T
1 0 0 p F
C 3
1 0 0 p F
C 4
R11
2 2 0 R
3 3 0 R
R10
12VCC
1
2
3
4
5
6
7
8
9
1 0
P 3
Header 10
1
2
3
4
5
6
7
8
9
1 0
P 4
Header 10
1
2
3
4
5
6
7
8
1 6
1 5
1 4
1 3
1 2
1 1
1 0
9
TRANSCEIVER
SW-DIP8
5VCC
R 7
1 0 K
R 8
2 0 K
12
P 2
Celda de carga
I N
1
2
O U T
3
G N D
LM7812
LM7812CT
1 0 0 p F
C 7
Cap2
1 0 0 p F
C 8
Cap2
12VCC 5VCC
F 1
Fuse 2
T 8
NPN
1
2
3
6
5
4
OPTO_MCC
1
2
MCC
Header 2
R12
2.2K
1 K
R13
5VCC
T 7
NPN
1
2
3
6
5
4
OPTO FINAL_C
R14
2.2K
R15
1 K
1
2
FINAL DE CARRERA
Header 2
5VCC
R16
3.9K
R18
3.9K
R26
Res1
5VCC
5VCC
R20
2.2K
R21
1.8K
1
2
3
P ?
Header 3H
Enlace
Enlace
1 K
R19
P_E
P_E
1
2
3
4 5
6
7
8
S ?
SW-DIP4
1 K
R23
1 K
R22
1 K
R24
1 K
R25
5VCC
1
2
3
4
5
ICSP
Header 5H
P_28P_27
P_27
P_28
5VCC
P_1
P_1
T 9
2N3904
1 K
R27
RELE7
D 7
Diode 1N4007
12VCC
1
2
LAMPARA
Header 2
Diagrama esquemático para el diseño del receptor

4
PCB para el diseño del receptor
0
1
2
1
2
1
2
1
2
1
2
1
2
1 2 3
3
2
1
1
2
1
2
1
2
1
2
1
2
1
2 1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1 2 3
1 2 3 4 5
1
2
3
321
321
321
1 2 3
4
5
6
3
2
1
4
5
6
3
2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
3 2 1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
2
1
2
1
2
1
2
1
2
1
2
1
2
1 2
1
1
22
12
1
2
1
2
1
2
1
2
1
1 2
2
1
2
1
1
2
1
2
2
1
2
1
2
1
2
1
12
12
1234
8765
1
2
3
1
2
3
1
2
3
1
2
3
1
2
3
1
2
3
1
2
3
1
2
3
1
2
3
87654321
16 15 14 13 12 11 10 9
1 2
2
1
2
1
111098765431 2
1
2
3
4
5
6
7
8
9
10
20
19
18
17
16
15
14
13
12
11
3
1
2
8
4
7
6
5
5674
8213
5674
8213
5674
8213
5674
8213
5674
8213
31 2 8
4 7 6 5

D-5
ANEXO D
MANUAL DE USUARIO

D-6
1.- INTRODUCCIÓN
A continuación se detallan las instrucciones necesarias para llevar a cabo de
forma segura y efectiva el funcionamiento del sistema inalámbrico para el control
de puentes grúa.
2.- FUNCIONAMIENTO
El control inalámbrico para el polipasto está diseñado para la elevación y
transporte de materiales sin la necesidad de utilizar cable.
Para iniciar el funcionamiento del polipasto, siga el siguiente procedimiento:
Verifique que el dip switch (color rojo) de selección del polipasto se encuentre
en la posición adecuada tanto en el transmisor como en el receptor antes de
entrar en funcionamiento.
Active el switch de palanca para el encendido de la botonera y el pulsador de
ON-OFF en el receptor.
Observe que el pulsador de parada de emergencia no esté activado, en caso
de estar activado gírelo para desbloquearlo.
Observe que el led indicador de enlace se encuentre parpadeando y los demás
leds indicadores se encuentren apagados.

D-7
Después de seguir estos pasos el polipasto se encuentra listo para su
funcionamiento.
Después de utilizar el polipasto condúzcalo hacia una posición segura,
presione el paro de emergencia y apague la botonera.
3.- CONSTRUCCIÓN
3.1 Construcción del transmisor
En la botonera se encuentra la tarjeta del transmisor la cual cuenta con los
siguientes componentes:

D-8
1) Módulo XBee-Pro.
2) Conector para leds indicadores de enlace, final de carrera, sobre carga y
relés térmicos.
3) Conector para el ICSP (In Circuit Serial Programming).
4) Conector para habilitar el cable virtual para el paro de emergencia.
1
2
3
4
5
6
7
8
10
9
11
12
15
14
13

D-9
5) Microcontrolador PIC 16F876A.
6) Conector para el switch de ON-OFF.
7) Bornera para la batería.
8) Bornera para el paro de emergencia.
9) Entrada proveniente de los pulsadores.
10) Dip switch para la selección del polipasto.
11) Conector indicador de carga para las baterías.
12) Entrada de voltaje para cargar las baterías.
13) Entrada de batería.
14) Indicador de batería baja.
15) Indicador de batería cargada.
3.2 Construcción del amplificador de instrumentación
La tarjeta del amplificador de señales cuanta con los siguientes componentes.

D-10
1) Puente de diodos.
2) Borneras de entrada de 12VAC.
3) Amplificador TL084CN.
4) Bornera de salida.
5) Trimer de 10K.
6) Bornera de entrada de señal para la celda de carga.
7) Bornera de 12VDC.
8) Regulador LM7912.
4
3
2
1 9
8
7
6
5

D-11
9) Regulador LM7812.
3.3 Construcción del receptor
La tarjeta del receptor cuanta con los siguientes componentes.
1
2
3 4 5 6 7 8 9 10
11
10
12
10
13
10
14
10
15
10
16
10
17
10
18
10

D-12
1) Bornera de 24Vdc.
2) Regulador LM317T.
3) Regulador LM7812.
4) Regulador LM7805.
5) Borneras de 24Vdc.
6) Bornera de entrada sensor final de carrera.
7) Bornera de entrada relé térmico.
8) Optoacopladores 4N25.
9) Conector para el ICSP (In Circuit Serial Programming).
10) Relés de 12Vdc.
11) Borneras de salida.
12) Buffer.
13) Conector para habilitar el cable virtual para el paro de emergencia.
14) Módulo XBee-Pro.

D-13
15) Bornera entrada celda de carga.
16) Dip switch para la selección del polipasto.
17) Microcontrolador PIC 16F876A.
18) Bornera para indicar el enlace.
4.- INDICADORES EN LA BOTONERA
Indicador de enlace.
Led color azul.
Indica el enlace entre el transmisor y el receptor cuando un botón es
presionado.
Indicador de sobre carga.
Led de color rojo.
Indica que la carga que se está elevando es excesiva, esta acción evitara
el accionamiento de elevación del gancho.
1
2
3
4
5
6
1
2
7

D-14
Indicador del sensor final de carrera.
Led color rojo.
Indica que la elevación del gancho ha llegado a su nivel más alto y no
podrá seguir elevando la carga.
Indicador de relé térmico.
Led color rojo.
Indica que el relé térmico para el accionamiento de los motores está en
falla, esta acción no permite realizar ningún desplazamiento hasta que el
fallo sea corregido.
Indicador de batería baja.
Led color rojo.
Indica que las baterías están por desgastarse, por lo que el operario tiene
que cargar las baterías nuevamente antes de utilizar la botonera.
Indicador del cargador de batería.
Led color verde.
Indica que las baterías se están cargando correctamente.
Indicador del paro de emergencia.
Leds de color rojo.
Parpadean los leds marcados con 2, 3, 4 cada 200ms indicando que el
paro de emergencia está activado, por lo que no se podrá realizar ningún
desplazamiento del polipasto hasta que el paro de emergencia sea
desactivado.
3
4
5
6
7

D-15
5.- Resolución de problemas
La siguiente tabla enumera algunos de los fallos y averías que pueden producirse
en el polipasto y las causas y acciones correctivas necesarias para eliminarlos.
Fallos Causa probable Acciones correctivas
El polipasto no funciona
La alimentación principal (220 VAC) no está conectada al polipasto.
Verifique que el transformador de alimentación no tenga ningún fallo.
La fuente de alimentación de la tarjeta del receptor no está conectada.
Observe que el breaker de alimentación del receptor esté encendido.
Se ha quemado el fusible de la tarjeta del receptor.
Cambie el fusible.
Los voltajes de alimentación al microcontrolador, módulo XBee-Pro y Relés en la tarjeta del receptor no existen o son incorrectos.
Revise con un multímetro que el voltaje a la salida de los reguladores sea el correcto.
Si se ha verificado que el regulador entrega un voltaje incorrecto reemplazarlo por un nuevo.
El transmisor no envía datos al receptor.
Verifique que la batería
este cargada.
Active el switch de
palanca ON-OFF.
Libere el pulsador de paro
de emergencia.
Revise y ajuste los cables
que ingresen a las
borneras de alimentación
y paro de emergencia.
Observe que el switch de
palanca no esté roto.

D-16
El led de enlace se prende pero el polipasto no se mueve
La botonera no envía los datos del estado de los pulsadores a la tarjeta del transmisor.
El relé térmico de los motores se ha activado.
Verifique que el cable que sale de la botonera a la tarjeta del transmisor no esté roto.
Observe que los conectores del cable estén bien fijos tanto en la tarjeta del transmisor como en la tarjeta con los pulsadores.
Observe en la botonera si el led indicador de los relés térmicos está encendido.
En caso de estar encendido el led indicador revise el relé térmico en la caja de control del puente grúa.
El polipasto está en funcionamiento, pero no eleva la carga.
El gancho sostiene una carga excesiva.
Compruebe que la carga del gancho no supera la carga máxima permitida.
Observe en la botonera si el led indicador de sobre carga está encendido.
En caso de estar encendido el led indicador observe que los cables provenientes del acondicionador de señales ingresen a la bornera en la tarjeta del receptor y no estén flojos o rotos.
Verifique que los voltajes de polarización en la tarjeta del acondicionador de señales son correctos.
.Observe que la señal proveniente de la celda de carga ingrese al la tarjeta del acondicionador de señales.
El pulsador de paro de emergencia no funciona.
La señal del pulsador de paro de emergencia no llega a la tarjeta del transmisor.
Observe que los cables que salen de los contactos del pulsador de emergencia no estén rotos.
Observe que los cables que llegan a la bornera estén fijos.
Observe el buffer en la tarjeta del receptor esté bien sujeto en el zócalo.
Compruebe que el Jumper del cable virtual esté en la

D-17
misma posición en el transmisor y receptor.
No existe comunicación entre el transmisor y receptor.
Falla de software del microcontrolador.
Módulos no funcionan correctamente.
Observe que el dip switch para la selección del polipasto se encuentran en la posición correcta tanto en el transmisor como en el receptor.
Cargue los programas nuevamente en el microcontrolador del transmisor como del receptor.
Compruebe el funcionamiento de los módulos XBee-Pro con la ayuda de las tarjetas de programación incluidas en el Kit de desarrollo.


















