CARACTERIZACION DE BIFURCACIONES EN UN¶ CIRCUITO ... · CARACTERIZACION DE BIFURCACIONES EN UN¶...
79
CARACTERIZACI ´ ON DE BIFURCACIONES EN UN CIRCUITO ELECTR ´ ONICO CONMUTADO LILIANA FERN ´ ANDEZ SAMAC ´ A Tesis presentada como requisito parcial para obtener el t´ ıtulo de MAG ´ ISTER EN INGENIER ´ IA AUTOMATIZACI ´ ON INDUSTRIAL Director: GERARD OLIVAR TOST, PH.D. Profesor Titular UNIVERSIDAD NACIONAL DE COLOMBIA, SEDE MANIZALES FACULTAD DE INGENIER ´ IA Y ARQUITECTURA 2007
Transcript of CARACTERIZACION DE BIFURCACIONES EN UN¶ CIRCUITO ... · CARACTERIZACION DE BIFURCACIONES EN UN¶...

CARACTERIZACION DE BIFURCACIONES EN UNCIRCUITO ELECTRONICO CONMUTADO
LILIANA FERNANDEZ SAMACA
Tesis presentada como requisito parcial para obtener el tıtulo de
MAGISTER EN INGENIERIA
AUTOMATIZACION INDUSTRIAL
Director:GERARD OLIVAR TOST, PH.D.
Profesor Titular
UNIVERSIDAD NACIONAL DE COLOMBIA, SEDE MANIZALESFACULTAD DE INGENIERIA Y ARQUITECTURA
2007


Aprobada por la Facultad de Ingenierıa y Ar-quitectura, en cumplimiento de los requisitosexigidos para otorgar el tıtulo de:
Magıster en Ingenierıa —Automatizacion Industrial
Gerard Olivar Tost, Ph.D.Director de la Tesis
Fabiola Angulo GarcıaJurado
Armando Jaime Ustariz FarfanJurado
Eduardo Antonio Cano PlataJurado
Universidad Nacional de ColombiaSede Manizales, 2007

ii

RESUMEN
CARACTERIZACION DE BIFURCACIONES EN UN CIRCUITO ELECTRONICOCONMUTADO
por
LILIANA FERNANDEZ SAMACAMagıster en Ingenierıa lınea de Automatizacion Industrial
UNIVERSIDAD NACIONAL DE COLOMBIA
Director: Gerard Olivar Tost, Ph.D.
Este informe contiene los resultados obtenidos en la Caracterizacion de Bifurcaciones en un CircuitoElectronico Conmutado, configuracion Buck, que presenta una dinamica no lineal causada por laconmutacion. El analisis de la dinamica de estos sistemas, tambien conocida como discontinua osuave a trozos, es de gran interes para la aplicacion de herramientas matematicas utilizadas en otrosdesarrollos, y porque permite profundizar en el analisis de no linealidades de circuitos conmutadosaplicados en la electronica de Potencia y en el desarrollo de controladores que actuen sobre dinamicasantes no modeladas.
La ley de control utilizada sobre el Buck es de la forma vcon = v(t)+Zi(t) y no se incluyen tecnicasde PWM para la conmutacion. El analisis se realiza para variaciones de los parametros R, L, C, Vin,Vlow y Z, con el fin de observar el comportamiento cualitativo del circuito en presencia de las nolinealidades causadas por la conmutacion.
Se muestran los planos de fase representativos de las variaciones realizadas en los parametros delcircuito electronico conmutado, los cuales se obtuvieron utilizando Simulink de Matlab y MATCONT(Aplicacion en Matlab disenada para el analisis de bifurcaciones de la dinamica de sistemas suaves).Para el empleo de este ultimo fue necesario suavizar la dinamica del sistema. Tambien, se muestranlos diagramas de bifurcacion uno-dimensionales utilizando MATCONT. Y se realiza la clasificacion delas bifurcaciones encontradas en el circuito conmutado configuracion Buck.


ABSTRACT
IDENTIFICATION OF BIFURCATIONS IN SWITCHING ELECTRONICS CIRCUIT
by
LILIANA FERNANDEZ SAMACA
UNIVERSIDAD NACIONAL DE COLOMBIA
Advisor: Gerard Olivar Tost, Ph.D.
In this document we present the results obtained in the Identification of Bifurcations in a SwitchingElectronic Circuit, Buck configuration, which presents nonlinear dynamics caused by the switchingmechanism. The dynamic analysis of these systems, also known as discontinuous or piecewise-smooth,is interesting due to the mathematical tools used in other developments, and allows deepening in thenonlinearities analysis of switching circuits. These techniques can be applied to Power Electronics,and controllers development that works on dynamics previously not modeled.
The control law used on the Buck is vcon = v(t) + Zi(t) and does not include PWM techniquesfor the switching. The analysis is done for R, L, Vin, Vlow, Z parameters variation in order to observecircuit qualitative behavior in presence of nonlinearities caused by the switching mechanism.
In addition, we show representative phase planes for parametric variations in the switching elec-tronic circuit, which were obtained using Simulink and MATCONT (Application in Matlab designedfor bifurcation analysis of smooth systems dynamics). For this last one it was necessary to smooththe system dynamics. Finally, we show one-dimensional bifurcation diagrams using MATCONT, andthe classification of bifurcations found in the switching circuit, Buck configuration.


RECONOCIMIENTOS
El autor desea expresar su reconocimiento a las siguientes personas:
Al Doctor Gerard Olivar Tost, profesor de la Universidad Nacional de Colombia, directorde tesis, por su invaluable colaboracion en el desarrollo de este proyecto.
A los Ingenieros Wilson Javier Perez y Oscar Mauricio Hernandez quienes siempre estu-vieron dispuestos a ayudarme.
A la Universidad Nacional de Colombia sede Manizales por permitirme continuar con laformacion a nivel de Maestrıa.
vii


DEDICATORIA
A ti, mi Perez
A mis hijos Javier y Julian
ix

Contenido
Contenido x
Lista de Tablas xi
Lista de Figuras xi
1 Introduccion 11.1 Convertidores de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Dispositivos Conmutadores de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Fuentes de no linealidad en la electronica de potencia . . . . . . . . . . . . . . . . . . . 3
2 Marco Referencial 52.1 El Convertidor DC-DC Buck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Dinamicas No Lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Campos Vectoriales de Sistemas Lineales, Linealizados y No lineales . . . . . . . . . . 92.4 Atractores en Sistemas No Lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.5 Bifurcaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.6 Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Diagramas de Fase del Convertidor Buck 193.1 Modelamiento Matematico del Buck . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Planos de Fase para variaciones de R . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Planos de Fase para variaciones de C . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.4 Planos de Fase para variaciones de L . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.5 Planos de Fase para variaciones de Vin . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.6 Planos de Fase para variaciones de Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.7 Planos de Fase para variaciones de Vlow . . . . . . . . . . . . . . . . . . . . . . . . . . 363.8 Simulacion del Circuito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4 Diagramas de Bifurcacion del Convertidor Buck 474.1 Diagramas de Bifurcacion del Convertidor Buck variando R . . . . . . . . . . . . . . . 474.2 Diagramas de Bifurcacion para variaciones de C . . . . . . . . . . . . . . . . . . . . . . 494.3 Diagramas de Bifurcacion para variaciones de L . . . . . . . . . . . . . . . . . . . . . . 524.4 Diagramas de Bifurcacion para variaciones de Z . . . . . . . . . . . . . . . . . . . . . . 544.5 Diagramas de Bifurcacion para variaciones de Vlow . . . . . . . . . . . . . . . . . . . . 554.6 Diagramas de Bifurcacion para variaciones de Vin . . . . . . . . . . . . . . . . . . . . . 55
5 Conclusiones 59
x

Bibliografıa 61
Lista de Tablas
3.1 Valores iniciales de los Parametros del Buck . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Cambio en la dinamica de acuerdo con la variacion de los parametros . . . . . . . . . . . 38
Lista de Figuras
1.1 Convertidores con un solo inductor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 Convertidor Buck en lazo abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Convertidor Buck con control proporcional en lazo cerrado . . . . . . . . . . . . . . . . . 62.3 Diagrama cobweb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Ejemplos de campos vectoriales en el espacio de estados de un sistema lineal de dos di-
mensiones. a)Nodo Estable, b)Nodo Inestable, c)Punto de Silla, d)Foco Estable, e)FocoInestable y f)Centro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Campo vectorial para x− µ(1− x2)x + x = 0, (a) para µ < 0 y (b) para µ > 0 . . . . . . 112.6 Periodo-1, periodo-2 y forma de onda caotica en el dominio del tiempo y en espacio de
estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.7 Diagrama de Bifurcaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.8 Bifurcacion Hopf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.9 Bifurcacion Fold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.10 Bifurcacion para Sistemas Discretos a)Bifurcacion Fold, b)Bifurcacion Flip y c) Bifurcacion
Neimark-Sacker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1 Convertidor Buck en lazo abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Convertidor Buck con la ley de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3 Convertidor Buck incluyendo las resistencias de los elementos pasivos . . . . . . . . . . . 223.4 Circuitos equivalentes del Convertidor Buck para cada estado del interruptor ‘s’ . . . . . . 223.5 Modelo del Buck en Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.6 Buck con control en Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.7 Funcion de conmutacion u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.8 Funcion de conmutacion u aproximada con arctan . . . . . . . . . . . . . . . . . . . . . . 253.9 Comparacion de funciones que aproximan a u, δ = 100 . . . . . . . . . . . . . . . . . . . . 253.10 Planos de fase y formas de onda del voltaje para valores nominales del buck . . . . . . . . 273.11 Planos de Fase para R = 24Ω . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.12 Dinamica cualitativa para R = 27Ω y R = 90Ω . . . . . . . . . . . . . . . . . . . . . . . . 29
xi

3.13 Plano de fase para R = 19Ω . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.14 Plano de fase y forma de onda del voltaje para R = 7Ω . . . . . . . . . . . . . . . . . . . 303.15 Planos de fase para C = 1µF y C = 9µF para diferentes CI . . . . . . . . . . . . . . . . . 313.16 Plano de fase para C = 20µF y diferentes CI . . . . . . . . . . . . . . . . . . . . . . . . . 313.17 Planos de fase para C > 47µF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.18 Planos de fase para diferentes valores de L . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.19 Planos de fase para diferentes valores Vin . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.20 Planos de fase para diferentes valores Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.21 Planos de fase para diferentes valores Vlow . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.22 Circuito utilizado en la Simulacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.23 Planos de fase para valores nominales del Buck . . . . . . . . . . . . . . . . . . . . . . . . 393.24 Planos de fase para diferentes valores R . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.25 Planos de fase para variaciones de C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.26 Planos de fase para para variaciones de L . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.27 Planos de fase para cambios en Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.28 Planos de fase para cambios en Vlow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.29 Planos de fase para diferentes valores Vin . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.30 Osiclograma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.1 Diagrama de Bifurcacion del Buck para variaciones de R . . . . . . . . . . . . . . . . . . . 474.2 Diagramas de bifurcaciones para variaciones de R . . . . . . . . . . . . . . . . . . . . . . . 484.3 Ciclos Limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.4 Diagramas de bifurcaciones para C, con valores de Vlow negativos . . . . . . . . . . . . . . 504.5 Diagramas de bifurcaciones para C, con valores de Vlow positivos . . . . . . . . . . . . . . 514.6 Diagrama de bifurcacion para L . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.7 Diagramas de bifurcaciones para variaciones de L . . . . . . . . . . . . . . . . . . . . . . . 534.8 Diagramas de bifurcaciones para variaciones de Z . . . . . . . . . . . . . . . . . . . . . . . 544.9 Diagramas de bifurcaciones para variaciones de Vlow . . . . . . . . . . . . . . . . . . . . . 564.10 Diagramas de bifurcaciones para variaciones de Vin . . . . . . . . . . . . . . . . . . . . . . 574.11 Diagrama de Bifurcacion del Buck para variaciones de Vin, ante Z y Vlow . . . . . . . . . 58
xii

Capıtulo 1
Introduccion
Actualmente, se desarrollan diversos trabajos en el analisis de fenomenos no lineales en convertidoresde potencia, ejemplo [8] - [52], a partir de modelos matematicos del convertidor que describen lasdinamicas asociadas entre las corrientes y tensiones del circuito, y la duracion del estado de conduccionde los conmutadores. Por otra parte, en la electronica de Potencia, para el diseno de convertidores depotencia, es conveniente tener presente regımenes de operacion que puedan causar comportamientosno deseados en el desempeno de los convertidores. Algunos de estos comportamientos estan asociadoscon la presencia de no linealidades en la operacion de los convertidores, provocadas por los dispositivoselectronicos de conmutacion que controlan las variables del sistema.
Los circuitos electronicos conmutados son de naturaleza no lineal ya que presentan estados deconduccion y no conduccion en los que sus modelos equivalentes varıan notablemente; los convertidoresDC a DC resultan ser un ejemplo muy interesante de este tipo de dinamica.
1.1 Convertidores de Potencia
Muchas ramas de la electronica se dedican al procesamiento de informacion o senales; por el contrario,la electronica de potencia se encarga del procesamiento de la energıa electrica. Aunque los convertidoresde potencia no tienen un fin propio, siempre se encuentran como intermediarios entre la produccionde energıa y el consumidor de energıa. Se estima que el 90 % de la energıa que se produce es procesadapor la electronica de potencia antes de su consumo final. La electronica de potencia se considera unatecnologıa verde y tiene tres ramas de interes:
• Convertir la energıa electrica de una forma a otra facilitando su control y regulacion.
• Realizar una conversion altamente eficiente y en consecuencia con baja disipacion de potenciaelectrica por calentamiento.
• Minimizar el tamano de los convertidores de potencia y del equipo que manejan.
A diferencia de otras areas de la electronica analogica, la electronica de potencia utiliza dispos-itivos de conmutacion. Aunque las fuentes de potencia pueden ser AC o DC, existen cuatro tiposde convertidores de potencia: convertidores AC-DC, convertidores DC-AC, convertidores DC-DC yconvertidores AC-AC. En AC las referencias nominales son generalmente formas de onda sinusoidal,mientras que en los DC las referencias son voltajes constantes. Los convertidores AC-DC reciben elnombre de rectificadores, y los convertidores DC-AC el de inversores.
El uso de la electronica de potencia en el hogar y el trabajo se ha ido incrementando; como ejemplose tienen los controles de iluminacion, la fuente de potencia del PC, los cargadores de baterıas, el controlindustrial de movimiento, las fuentes ininterrumpidas de potencias UPS, los acondicionamientos parafuentes de energıa alternativa etc...
1

Figura 1.1: Convertidores con un solo inductor
Se requiere alta eficiencia que permita reducir costos de la energıa y la disipacion de calor en losconvertidores. En sistemas de alta potencia se han obtenido eficiencias hasta del 99 %, mientras ensistemas de baja potencia se tienen eficiencias cercanas al 80 %.
Los conmutadores son operados cıclicamente, y sirven para variar las interconexiones del circuito.Los capacitores e inductores desempenan acciones de filtraje, regulando el flujo de potencia a travesdel almacenamiento temporal de la energıa suministrada. Los transformadores escalan voltajes ycorrientes, y tambien proveen aislamiento entre la fuente y la carga.
Un conmutador ideal tiene el voltaje de conmutacion, la corriente en el estado de apagado y eltiempo de conmutacion iguales a cero; sin embargo en la realidad estos parametros difieren de losideales y en consecuencia existe disipacion de potencia en el conmutador. [1] y [2].
Convertidores con un solo inductor
Existen muchas configuraciones de convertidores, en la figura 1.1 se observan algunos ejemplos deconvertidores de una entrada y una salida que utilizan un solo inductor y entre los cuales se encuentrael convertidor DC-DC Buck. La razon de conversion M(d) es funcion del ciclo util d. En el Buck larazon de conversion es lineal.
De acuerdo con [3] entre los convertidores de un solo inductor estan: el buck, el boost, el buck- boost,el buck-boost no inversor, el puente, la configuracion Watkins-Johnson, la configuracion invertidade Watkins-Johnson y el puente alimentado por corriente (Current-fed bridge). Estos se observanrespectivamente en la figura 1.1 .
1.2 Dispositivos Conmutadores de Potencia
La clave de la electronica de potencia esta en la disponibilidad y compatibilidad de los elementos deconmutacion. A continuacion se describen los elementos de conmutacion mas comunes en la Electronicade Potencia:
2

• Diodo: Los diodos pueden ser considerados como switches pasivos o valvulas de no retorno.Idealmente en estado de conduccion (polarizacion directa) tienen resistencia cero y funcionancomo un switch cerrado. En polarizacion inversa su resistencia es idealmente infinita y funcionacomo un switch abierto. Entre los diodos de potencia disponibles estan los schottky, los pin ylos de recuperacion rapida.
• Tiristores o SCR: El SCR (Rectificador controlado de Silicio) es un elemento de cuatro capaspnpn. Si se compara con un diodo rectificador normal, el SCR posee una terminal de controldenominado compuerta. En polarizacion inversa no conduce manteniendose bloqueado y enpolarizacion directa conduce cuando se aplica un pulso al terminal de compuerta. La conduccionse mantiene hasta que la corriente cae por debajo de un valor conocido como corriente demantenimiento. Se han incluido variaciones al SCR que permiten apagarlo o la conduccion eninverso. Los SCR se vienen utilizando ampliamente en aplicaciones de alta potencia, pero debaja frecuencia.
• Transistores de Union Bipolar: Los transistores BJT se desarrollaron durante la decada de lossesentas y en la decada de los setentas fueron empleados como conmutadores en fuentes depotencia. Para que funcione como conmutador el BJT se opera en la region de corte (funcionacomo switch abierto) y en la region de saturacion (trabaja como switch cerrado), a traves delterminal de base. Su frecuencia de trabajo esta limitada alrededor de 40Khz.
• MOSFET de Potencia: Los transistores de Metal Oxido de Silicio se vuelven comerciales aprox-imadamente en la decada de los ochenta y por ser un dispositivo unipolar sus frecuencias detrabajo alcanzan el orden de megahertz. Los MOSFET reemplazan a los BJT en aplicacionesde baja potencia y su construccion es compatible con aplicaciones de alta potencia, ademas susrangos de voltaje son mas bajos que en otros elementos.
• IGBT: El transistor Bipolar de compuerta aislada llego a ser una realidad comercial a finalesde los anos ochenta. Este actua como un MOSFET manejando un BJT de potencia, y tienealgunas de las ventajas de ambos como: facilidad de manejo, y bajas perdidas en la conduccion,sin embargo, el almacenamiento de portadores minoritarios causa perdidas en alta conmutacion.Una de las areas de principal aplicacion de los IGBT es en los drives de motores de variosKilovatios, donde predominan como elementos de conmutacion. Las frecuencias de conmutacionusadas son de decenas de kilohertz.
Cada tipo de semiconductor se controla de forma diferente. Por ejemplo, en los diodos la conducciondepende de la polarizacion, lo que significa que su estado de encendido y apagado estan determinadospor el voltaje aplicado; en los tiristores, el estado de encendido puede ser comandado a traves delterminal de compuerta, sin embargo, el apagado depende de las caracterısticas del circuito; en lostransistores se puede controlar tanto el encendido como el apagado.
1.3 Fuentes de no linealidad en la electronica de potencia
Debido a que el objetivo es convertir energıa electrica con alta eficiencia, el convertidor ideal depotencia tendrıa muy pocas perdidas en sus componentes. A continuacion se describen dos gruposbasicos de componentes que pueden hacer parte de un convertidor:
• Componentes de conmutacion, como transistores y diodos. Los MOSFET y BJT son switchesactivos, se encienden o se apagan de acuerdo con un senal aplicada que depende del estado delas variables en un sistema de control en lazo cerrado. Los diodos (conmutadores pasivos) tienenuna alta no linealidad en sus caracterısticas de voltaje-corriente.
3

• Componentes reactivos (almacenadores de energıa), como inductores y capacitores. Estan carac-terizados por ecuaciones diferenciales de la forma v = L di
dt para un inductor, e i = C dvdt para un
capacitor. Estos elementos almacenan energıa del circuito y luego la retornan.
Los convertidores de potencia emplean elementos de ambos grupos. La energıa es conducida alrede-dor del circuito por los componentes de switcheo, mientras los componentes reactivos actuan comoalmacenadores intermedios de energıa y como reservas de entrada-salida. La presencia de ambos tiposde componentes tiene como consecuencia que los circuitos son no lineales. Esto tiene dos implicaciones:Los convertidores de potencia son difıciles de analizar y tienen una alta probabilidad de mostrar com-portamientos inusuales. En la practica, los convertidores de potencia tienen muchas fuentes no deseadasde no linealidad, entre las que estan:
• Dispositivos semiconductores de conmutacion que tienen intrınsecamente caracterısticas DC nolineales. Estos tambien presentan no linealidades debidas a las capacitancias en las uniones, ymuchos sufren de almacenamiento de portadores minoritarios.
• Abundancia de inductancias no lineales: transformadores, chokes, amplificadores magneticos einductores saturables usados en snubbers.
• Sistemas de control que usualmente involucran componentes no lineales como: comparadores,PWMs (Moduladores de ancho de pulso), multiplicadores, PLL (Lazos de seguimiento de fase),monoestables y controladores digitales.
La clasificacion de bifurcaciones discontinuas es un tema de gran interes en la area de la matematicaaplicada. Teniendo en cuenta que los esfuerzos se habıan enfocado al analisis de bifurcaciones suaves,el analisis de Bifurcaciones discontinuas es un campo de investigacion relativamente nuevo que seencuentra en exploracion. Razon por la cual los sistemas que presentan esta clase de bifurcacionesresultan ser atractivos para realizar este analisis. Los convertidores DC-DC son un ejemplo de sistemasque presenta bifurcaciones discontinuas, y dada la versatilidad que se tiene sobre la manipulacion desus parametros y la facilidad de medicion de las variables de estado, se convierten en objeto de estudioen esta area.
4
Capıtulo 2
Marco Referencial
2.1 El Convertidor DC-DC Buck
Un ejemplo concreto de un convertidor de potencia es un convertidor DC-DC Buck. En este ejemploel modelado convencional se contrasta con dinamicas no lineales. Aunque el convertidor Buck es unode los mas simples, es tambien uno de los convertidores de potencia mas utilizados. Consiste en uncircuito chopper que convierte una entrada DC a una salida DC de menor voltaje. Muchas fuentesconmutadas de potencia utilizan circuitos relacionados con este. Una aplicacion es la conversion delvoltaje estandar 5V DC, usado en los computadores, a uno menor de 3.3V necesario para los circuitosde procesamiento y control, como los de la familia Pentium.
En la practica un convertidor Buck puede lograr una eficiencia hasta del 92 %, mientras que unregulador lineal podrıa tener una eficiencia del 66%, produciendo cuatro veces mas disipacion de calor.El Buck tambien puede ser usado para potencias del orden de Kilovatios.
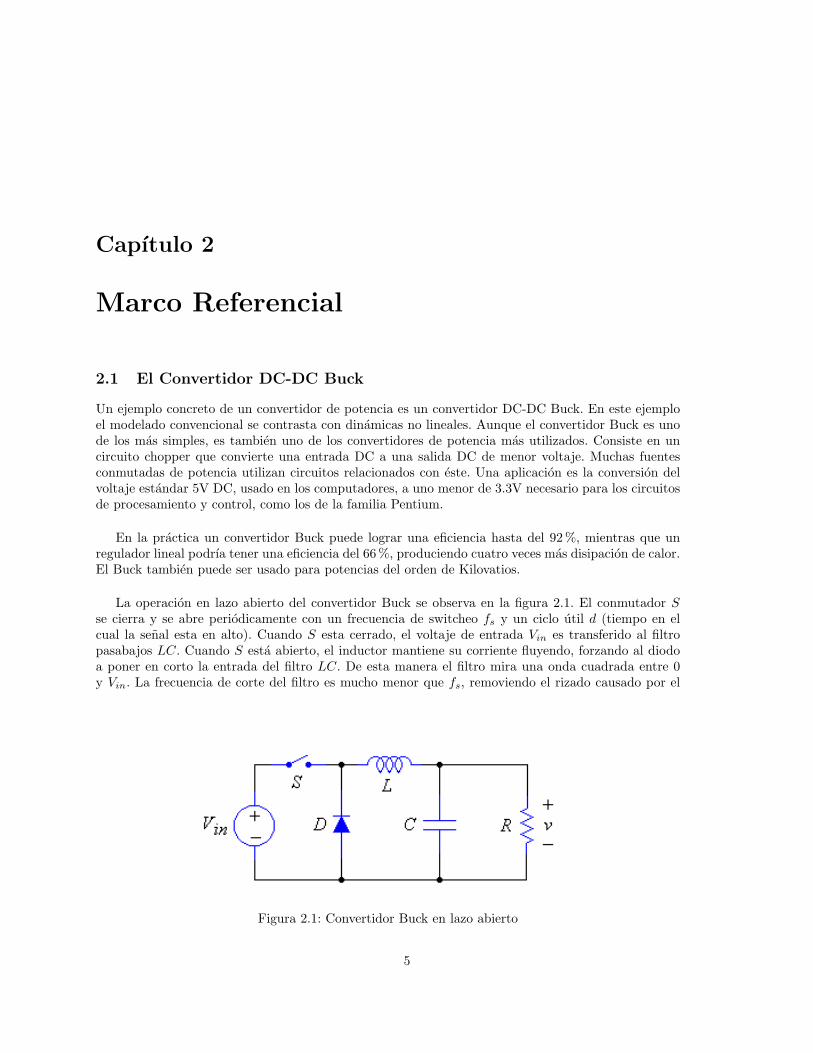
La operacion en lazo abierto del convertidor Buck se observa en la figura 2.1. El conmutador Sse cierra y se abre periodicamente con un frecuencia de switcheo fs y un ciclo util d (tiempo en elcual la senal esta en alto). Cuando S esta cerrado, el voltaje de entrada Vin es transferido al filtropasabajos LC. Cuando S esta abierto, el inductor mantiene su corriente fluyendo, forzando al diodoa poner en corto la entrada del filtro LC. De esta manera el filtro mira una onda cuadrada entre 0y Vin. La frecuencia de corte del filtro es mucho menor que fs, removiendo el rizado causado por el
Figura 2.1: Convertidor Buck en lazo abierto
5
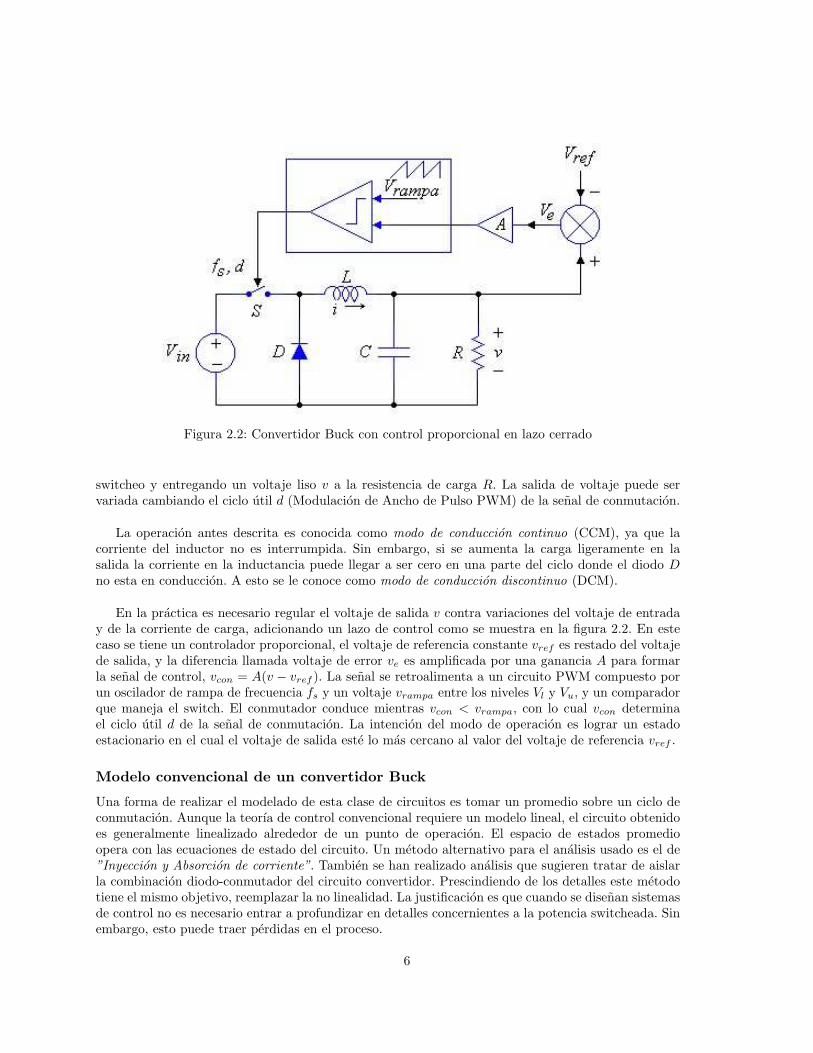
Figura 2.2: Convertidor Buck con control proporcional en lazo cerrado
switcheo y entregando un voltaje liso v a la resistencia de carga R. La salida de voltaje puede servariada cambiando el ciclo util d (Modulacion de Ancho de Pulso PWM) de la senal de conmutacion.
La operacion antes descrita es conocida como modo de conduccion continuo (CCM), ya que lacorriente del inductor no es interrumpida. Sin embargo, si se aumenta la carga ligeramente en lasalida la corriente en la inductancia puede llegar a ser cero en una parte del ciclo donde el diodo Dno esta en conduccion. A esto se le conoce como modo de conduccion discontinuo (DCM).
En la practica es necesario regular el voltaje de salida v contra variaciones del voltaje de entraday de la corriente de carga, adicionando un lazo de control como se muestra en la figura 2.2. En estecaso se tiene un controlador proporcional, el voltaje de referencia constante vref es restado del voltajede salida, y la diferencia llamada voltaje de error ve es amplificada por una ganancia A para formarla senal de control, vcon = A(v − vref ). La senal se retroalimenta a un circuito PWM compuesto porun oscilador de rampa de frecuencia fs y un voltaje vrampa entre los niveles Vl y Vu, y un comparadorque maneja el switch. El conmutador conduce mientras vcon < vrampa, con lo cual vcon determinael ciclo util d de la senal de conmutacion. La intencion del modo de operacion es lograr un estadoestacionario en el cual el voltaje de salida este lo mas cercano al valor del voltaje de referencia vref .
Modelo convencional de un convertidor Buck
Una forma de realizar el modelado de esta clase de circuitos es tomar un promedio sobre un ciclo deconmutacion. Aunque la teorıa de control convencional requiere un modelo lineal, el circuito obtenidoes generalmente linealizado alrededor de un punto de operacion. El espacio de estados promedioopera con las ecuaciones de estado del circuito. Un metodo alternativo para el analisis usado es el de”Inyeccion y Absorcion de corriente”. Tambien se han realizado analisis que sugieren tratar de aislarla combinacion diodo-conmutador del circuito convertidor. Prescindiendo de los detalles este metodotiene el mismo objetivo, reemplazar la no linealidad. La justificacion es que cuando se disenan sistemasde control no es necesario entrar a profundizar en detalles concernientes a la potencia switcheada. Sinembargo, esto puede traer perdidas en el proceso.
6

Modo de Conduccion Continuo
A continuacion se muestra la tecnica convencional utilizada para el modelaje de convertidores: Lasecuaciones son:
di
dt=
(Vin − v)/L S conduce y D abierto (a)−v/L S abierto y D conduce (b)
0 S y D no conducen (c)(2.1)
ydv
dt=
i− v/R
C(2.2)
donde i, v y Vin son funciones del tiempo.
En modo de conduccion continuo, S conduce para una fraccion d en cada ciclo y D conduce parael resto 1− d. Las ecuaciones promedio son obtenidas sumando la multiplicacion de las expresion (a)y (c) de la ecuacion (2.1), para d y con la expresion (2.2), para el caso 1− d, obteniendo:
di
dt=
dVin − v
L(2.3)
dv
dt=
i− v/R
C(2.4)
De esta manera, solo la ecuacion (2.1) se ve afectada. Este puede no ser el caso de otro convertidor.Observese que las ecuaciones (2.3) y (2.4) representan promedios locales de variables instantaneas.
Teniendo en cuenta las perturbaciones y linealizando alrededor de un punto de operacion v, d, Vin,e i donde v = V + v, vin = Vin + vin, d = D + d e i = I + i; se puede obtener una expresion en formade funcion de transferencia que establezca la dinamica entre el voltaje de salida v y el ciclo util d dela senal de conmutacion, como se muestra en la ecuacion (2.5).
v
d=
Vin
1 + sL/R + s2LC(2.5)
La funcion de transferencia del PWM es:
d
ve=
A
Vu − Vl(2.6)
Modo de Conduccion Discontinuo
Analizar el modo DCM del convertidor Buck es mas complicado, por que existen tres configuracionesdiferentes del circuito durante un ciclo: S conduce para una fraccion de d en cada ciclo de switcheo;D conduce por un tiempo dependiendo de las condiciones del circuito y del estado de la corrientei = 0, y por ultimo tanto D como S se abren para el tiempo restante. De esta manera las expresiones(a) y (c) de la ecuacion (2.1) contienen las condiciones que determinan el intervalo de conduccion deldiodo D. No obstante, la complejidad del analisis se incrementa. La funcion de transferencia obtenidadespues de la linealizacion se encuentra en la ecuacion (2.7).
v
d=
A0
1 + sτ(2.7)
donde A0 es la ganancia y τ es la constante de tiempo del sistema.
7

2.2 Dinamicas No Lineales
Modelos en Espacio de Estados
Para realizar el analisis de un sistema se debe encontrar un numero mınimo de variables, linealmenteindependiente, que sea capaz de describir totalmente la dinamica del sistema; a ese conjunto se ledenomina variables de estado. Estudiar la dinamica consiste en investigar esencialmente como lasvariables de estado cambian con el tiempo. Matematicamente esto se logra relacionando la razon decambio de las variables de estado con su valor comun, a traves de un sistema de ecuaciones diferencialesde primer orden. Una expresion matematica que representarıa el espacio de estados de un sistema conn variables de estado es:
xi = fi(x1, x2, x3, ...xn) (2.8)
Si x = (x1, x2, x3, ...xn) entonces se puede expresar de la forma x = f(x).Algunos sistemas cambian en forma discreta, aunque pueden resultar sistemas que realmente estan
cambiado continuamente pero solo se pueden observar en ciertos intervalos. Los circuitos de electronicade potencia puede ser modelados a traves de espacio de estados. Estos pueden ser inherentementediscretos como en los sistemas de electronica digital donde las variables de estado del instante n + 1son expresadas en terminos de las del instante n.
xn+1 = f(xn) (2.9)
La ecuacion (2.9), dadas las condiciones iniciales, puede ser resuelta a traves de metodos analıticosy/o numericos, y la solucion darıa los estados futuros del sistema en funcion del tiempo.
Geometricamente, la dinamica puede ser visualizada construyendo un espacio utilizando las varia-bles de estado como coordenadas. Esto es llamado un diagrama de fase. Los estados del sistema encualquier instante son representados por puntos en este grafico. Dadas las condiciones iniciales, los pun-tos de estado se mueven en el diagrama de fase y este movimiento se puede determinar completamentea traves de las ecuaciones de estado. La ruta que siguen los puntos de estado es denominada orbita otrayectoria del sistema que parte de unas condiciones iniciales. Estas trayectorias son obtenidas comola solucion de la ecuacion diferencial (2.8) o iteraciones del mapa representado en la ecuacion (2.9).
En un sistema discreto unidimensional hay una forma muy simple de obtener la orbita originadadadas unas condiciones iniciales (observese la figura 3). En la figura 2.3 se muestra la funcion xn+1 =f(xn) y una linea con pendiente 45o. La interseccion de la grafica de la funcion y la linea de 45o es elpunto xn+1 = f(xn) = x∗. La iteracion de la funcion comienza en cualquier condicion inicial x0. Sedibuja una linea vertical para unirla con la grafica del mapa y obtener la altura vertical del punto x1.Despues, se halla su valor en el eje horizontal dibujando una linea horizontal que se una con la lineade 45o y caiga sobre el eje horizontal. El mapa de x0 a x1 es mostrado por una flecha curvada sobreel eje horizontal. Las iteraciones x1 −→ x2 −→ x3 −→ x4 −→ x5 son hechas de la misma forma. Elprocedimiento anterior recibe el nombre de diagrama cobweb (diagrama telarana).
Sistemas Autonomos y No Autonomos
Si un sistema de ecuaciones no tiene aplicada externamente una senal de entrada variante en el tiempoo cualquier otra variacion en el tiempo, el sistema es autonomo. En muchos sistemas representados porecuaciones diferenciales, al lado derecho no tienen terminos que dependan explıcitamente del tiempo.Un ejemplo tıpico es una simplificacion del fenomeno de la conveccion atmosferica, conocida como el
8

Figura 2.3: Diagrama cobweb
sistema de Lorenz:dx
dt= −3(x− y)
dy
dt= −xz + rx− y (2.10)
dz
dt= xy − z
donde r es un parametro. Los sistemas con entradas externas o funciones que fuerzan o que tienenvariaciones en el tiempo o en su definicion son llamados sistemas no autonomos. Estos son sistemasque en el lado derecho contienen terminos que dependen explıcitamente del tiempo. Un ejemplo deestos sistemas es el pendulo, cuyas ecuaciones son:
dx
dt= y (2.11)
dy
dt= −y − g sin x + F cos wt
Los sistemas obtenidos para circuitos de electronica de potencia gobernados con controladoreslogicos comandados por reloj, son sistemas no autonomos.
2.3 Campos Vectoriales de Sistemas Lineales, Linealizados y No lineales
Para estudiar el comportamiento de la dinamica de un sistema dado se debe encontrar la trayectoriapartiendo de las condiciones iniciales especificadas. Sin embargo, no requiere calcular todas las posiblestrayectorias para estudiar el sistema. Esto puede notarse al lado izquierdo de (2.12) dada la razon decambio de las variables de estado:
x = f(x) (2.12)
9
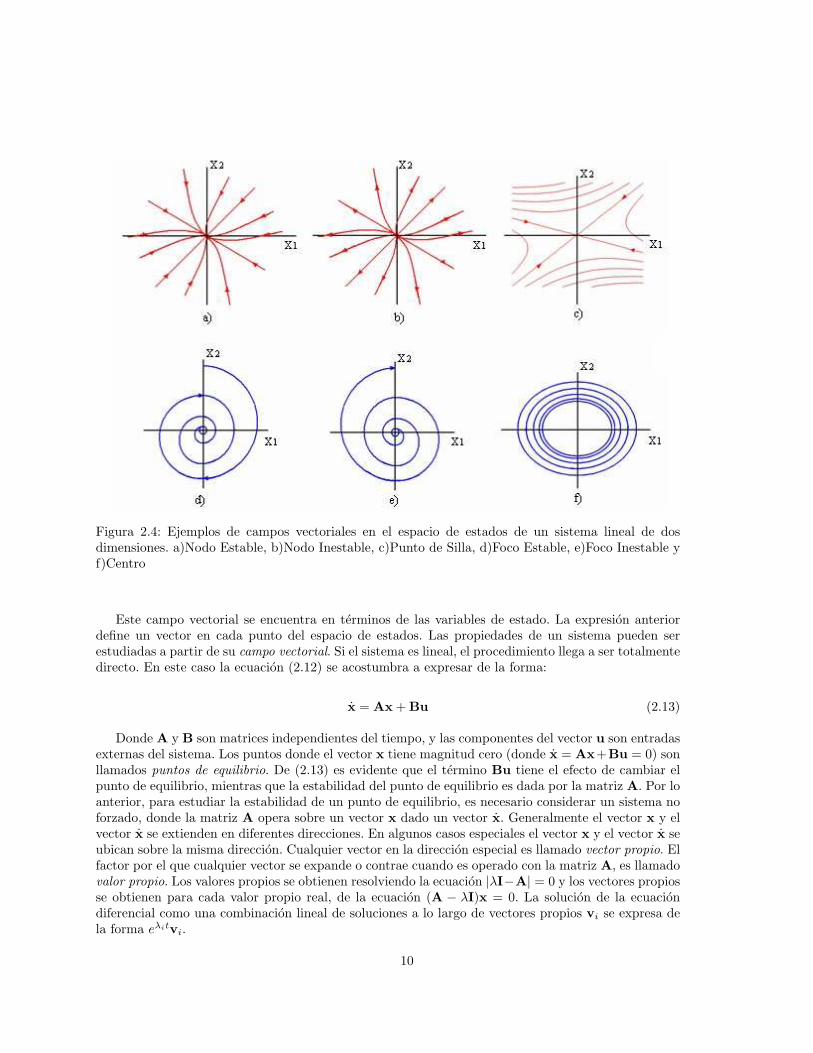
Figura 2.4: Ejemplos de campos vectoriales en el espacio de estados de un sistema lineal de dosdimensiones. a)Nodo Estable, b)Nodo Inestable, c)Punto de Silla, d)Foco Estable, e)Foco Inestable yf)Centro
Este campo vectorial se encuentra en terminos de las variables de estado. La expresion anteriordefine un vector en cada punto del espacio de estados. Las propiedades de un sistema pueden serestudiadas a partir de su campo vectorial. Si el sistema es lineal, el procedimiento llega a ser totalmentedirecto. En este caso la ecuacion (2.12) se acostumbra a expresar de la forma:
x = Ax + Bu (2.13)
Donde A y B son matrices independientes del tiempo, y las componentes del vector u son entradasexternas del sistema. Los puntos donde el vector x tiene magnitud cero (donde x = Ax+Bu = 0) sonllamados puntos de equilibrio. De (2.13) es evidente que el termino Bu tiene el efecto de cambiar elpunto de equilibrio, mientras que la estabilidad del punto de equilibrio es dada por la matriz A. Por loanterior, para estudiar la estabilidad de un punto de equilibrio, es necesario considerar un sistema noforzado, donde la matriz A opera sobre un vector x dado un vector x. Generalmente el vector x y elvector x se extienden en diferentes direcciones. En algunos casos especiales el vector x y el vector x seubican sobre la misma direccion. Cualquier vector en la direccion especial es llamado vector propio. Elfactor por el que cualquier vector se expande o contrae cuando es operado con la matriz A, es llamadovalor propio. Los valores propios se obtienen resolviendo la ecuacion |λI−A| = 0 y los vectores propiosse obtienen para cada valor propio real, de la ecuacion (A − λI)x = 0. La solucion de la ecuaciondiferencial como una combinacion lineal de soluciones a lo largo de vectores propios vi se expresa dela forma eλitvi.
10

Figura 2.5: Campo vectorial para x− µ(1− x2)x + x = 0, (a) para µ < 0 y (b) para µ > 0
Si la parte real de los valores propios es negativa, el sistema es estable en el sentido que cualquierperturbacion de un punto de equilibrio desaparece y el sistema retorna al punto de equilibrio. A unpunto de equilibrio estable se le llama nodo estable (pues hay nodos inestables (Ver figura 2.4b)).Si la parte real de los valores propios es positiva el sistema es inestable. Si los valores propios sonnetamente reales (parte imaginaria es cero) el sistema es no oscilante; de lo contrario sı lo es. Sialgunos valores propios son reales y negativos mientras otros son reales y positivos, el sistema esestable en el subespacio asociado con los valores propios negativos, e inestable lejos de este. Tal puntode equilibrio es denominado saddle (silla de montar). Un sistema con un punto de equilibrio de sillade montar es globalmente inestable. Si los valores propios son complejos con parte real negativa setiene un foco. Si los valores propios son imaginarios puros, la respuesta del sistema es oscilatoria, y elpunto de equilibrio es llamado centro. En la figura 2.4 aparecen ejemplos de campos vectoriales tıpicosen sistemas lineales.
2.4 Atractores en Sistemas No Lineales
Para ilustrar un sistema no lineal caracterıstico, se va a tomar el sistema descrito por x−µ(1−x2)x+x = 0, conocido como la ecuacion de Van der Pol. La figura 2.5 muestra el campo vectorial de estesistema con las variables de estado x y y = x. Si el parametro µ es variado de un valor negativo a unvalor positivo, se varıa el campo vectorial. El punto de equilibrio se vuelve inestable y las lıneas decampo forman un espiral hacia afuera. Pero este no se vuelve inestable si las lıneas de campo a unadistancia del punto de equilibrio se estabilizan en un punto interno. Cuando los dos tipos de lıneas decampo se encuentran, entonces se forma un limite periodico estable, llamado ciclo lımite. Este es unlımite global cuya existencia puede no ser predecida con la teorıa de sistemas lineales.
Notese que existe una gran diferencia entre el lımite periodico en la figura 2.4f (sistema linealcon valores propios puramente imaginarios) y el campo vectorial de la figura 2.5b. En el primer casouna orbita periodica de diferente radio es obtenida para condiciones iniciales diferentes, mientras enel caso del ciclo lımite, las trayectorias empiezan en diferentes condiciones iniciales y convergen almismo comportamiento periodico. El ciclo lımite parece atraer puntos del espacio de estados. Este esun ejemplo de un atractor.
De esta manera, en un sistema no lineal se puede llegar a encontrar atractores periodicos como
11

0.198 0.2 0.202 0.204
12.65
12.7
12.75
0.39 0.392 0.394 0.396
12.7
12.8
0.478 0.48 0.482 0.484
12.4
12.8
13.4
12.65 12.7 12.750.52
0.58
0.64
12.65 12.7 12.75 12.8
0.55
0.6
0.65
12.4 12.6 12.8 13 13.2 13.4
0.4
0.5
0.6
0.7
0.8
Tiempo Espacio de Estados
Figura 2.6: Periodo-1, periodo-2 y forma de onda caotica en el dominio del tiempo y en espacio deestados
el de la figura 2.5b. Si el espacio de estados es de orden mayor, por ejemplo tres, las orbitas tienenla libertad de dar vuelta alrededor sin interceptarse. Por lo tanto, en este tipo de sistema se puedentener atractores mas complejos.
Suponiendo que la dinamica de un sistema es de orden tres, y que presenta oscilaciones, cuando sedibuja una variable con respecto al tiempo esta tiene una forma periodica como la que se observa enla figura 2.6a, que corresponde a la trayectoria del espacio de estados que se muestra en un solo lazo.Cuando se varıan los parametros la forma de onda cambia (ver figura 2.6b). Notese que las figurasde la derecha en la figura 2.6 muestran una proyeccion de espacio tridimensional sobre un espacio dedos dimensiones. Una orbita no puede interceptarse a sı misma porque existe una unica velocidad delvector x asociada con cada punto en el espacio de estados.
En algunos casos en sistemas de orden tres o mayor aparecen orbitas lımites aperiodicas comose muestra en la figura 2.6c. En este caso el sistema permanece dentro de un volumen finito en elespacio de estados, pero nunca repite el mismo estado. En cada lazo a traves del espacio de estadosel estado recorre una nueva trayectoria. Esta situacion es llamada caos y el atractor resultante esllamado strange attractor (atractor extrano). Cuando esta situacion ocurre en un circuito electronico,el sistema experimenta oscilaciones aleatorias.
12
26 28 30 32 34 36
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
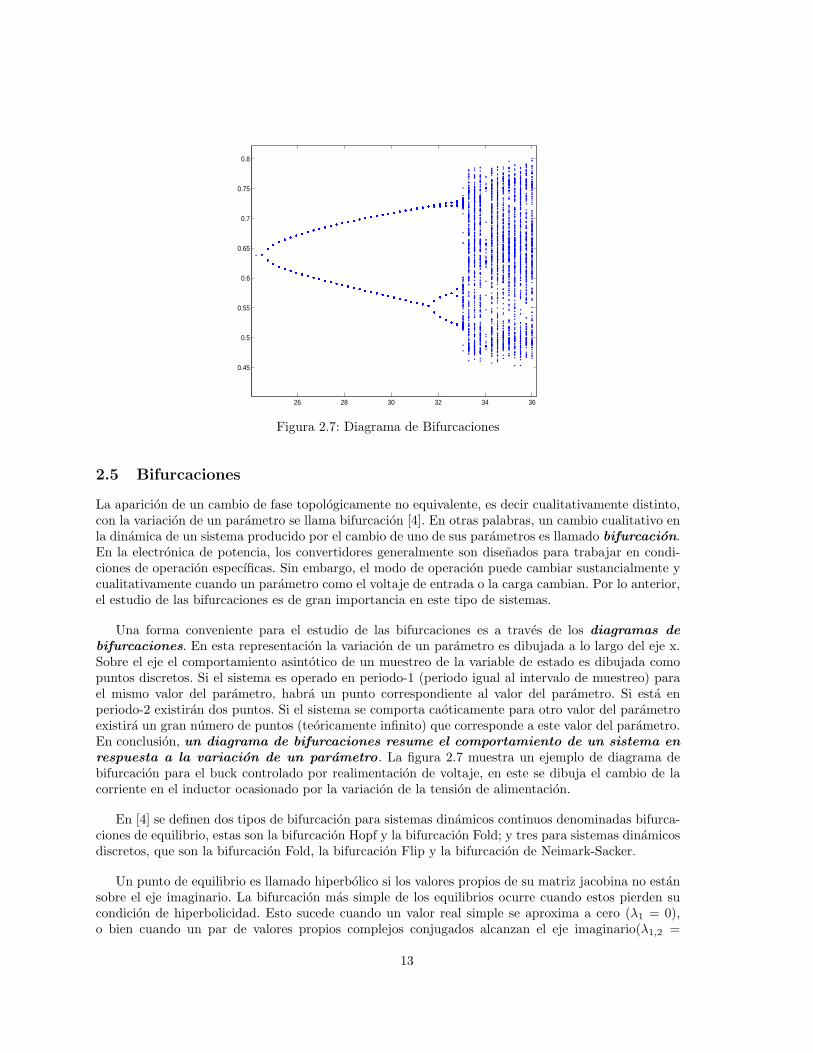
Figura 2.7: Diagrama de Bifurcaciones
2.5 Bifurcaciones
La aparicion de un cambio de fase topologicamente no equivalente, es decir cualitativamente distinto,con la variacion de un parametro se llama bifurcacion [4]. En otras palabras, un cambio cualitativo enla dinamica de un sistema producido por el cambio de uno de sus parametros es llamado bifurcacion.En la electronica de potencia, los convertidores generalmente son disenados para trabajar en condi-ciones de operacion especıficas. Sin embargo, el modo de operacion puede cambiar sustancialmente ycualitativamente cuando un parametro como el voltaje de entrada o la carga cambian. Por lo anterior,el estudio de las bifurcaciones es de gran importancia en este tipo de sistemas.
Una forma conveniente para el estudio de las bifurcaciones es a traves de los diagramas debifurcaciones. En esta representacion la variacion de un parametro es dibujada a lo largo del eje x.Sobre el eje el comportamiento asintotico de un muestreo de la variable de estado es dibujada comopuntos discretos. Si el sistema es operado en periodo-1 (periodo igual al intervalo de muestreo) parael mismo valor del parametro, habra un punto correspondiente al valor del parametro. Si esta enperiodo-2 existiran dos puntos. Si el sistema se comporta caoticamente para otro valor del parametroexistira un gran numero de puntos (teoricamente infinito) que corresponde a este valor del parametro.En conclusion, un diagrama de bifurcaciones resume el comportamiento de un sistema enrespuesta a la variacion de un parametro. La figura 2.7 muestra un ejemplo de diagrama debifurcacion para el buck controlado por realimentacion de voltaje, en este se dibuja el cambio de lacorriente en el inductor ocasionado por la variacion de la tension de alimentacion.
En [4] se definen dos tipos de bifurcacion para sistemas dinamicos continuos denominadas bifurca-ciones de equilibrio, estas son la bifurcacion Hopf y la bifurcacion Fold; y tres para sistemas dinamicosdiscretos, que son la bifurcacion Fold, la bifurcacion Flip y la bifurcacion de Neimark-Sacker.
Un punto de equilibrio es llamado hiperbolico si los valores propios de su matriz jacobina no estansobre el eje imaginario. La bifurcacion mas simple de los equilibrios ocurre cuando estos pierden sucondicion de hiperbolicidad. Esto sucede cuando un valor real simple se aproxima a cero (λ1 = 0),o bien cuando un par de valores propios complejos conjugados alcanzan el eje imaginario(λ1,2 =
13

Figura 2.8: Bifurcacion Hopf
Figura 2.9: Bifurcacion Fold
±iω, ω > 0) para algun valor del parametro que se varıa. A continuacion se describen las bifurcacionesHopf y Fold para sistemas dinamicos continuos.
Bifurcacion Andronov-Hopf
Comunmente conocida como la bifurcacion Hopf. Si se tiene un sistema de orden dos de la formaf(x, α), donde α es un parametro del sistema, la bifurcacion se presenta cuando para variaciones deα el equilibrio estable se convierte en inestable y adicionalmente aparece un ciclo estable una vez elparametro supera su valor crıtico [5]. En resumen, esta asociada con la aparicion de valores propioscomplejos λ1,2 = ±iω, ω > 0. Ver figura 2.8, tomado de [4].
Bifurcacion Fold
Tambien conocida como bifurcacion silla-nodo, tangente o de punto de retorno. En este caso antes deque el parametro alcance su valor crıtico, el sistema tiene dos puntos de equilibrio, uno estable y otroinestable. Una vez el parametro supera este valor crıtico los dos equilibrios desaparecen. Por lo tanto,la bifurcacion es asociada con la aparicion de λ1 = 0 (Ver figura 2.9).
14

Figura 2.10: Bifurcacion para Sistemas Discretos a)Bifurcacion Fold, b)Bifurcacion Flip y c) Bifur-cacion Neimark-Sacker
Bifurcacion para Sistemas Discretos
Para sistemas dinamicos discretos las bifurcaciones fundamentales de los puntos fijos ocurren biencuando un multiplicador positivo se aproxima al cırculo unitario y se tiene µ1 = 1, o bien cuando unmultiplicador negativo se aproxima al cırculo unitario y se tiene µ1 = −1. Otra posibilidad es que unpar de multiplicadores complejos conjugados toquen al cırculo unitario y se tiene que m1,2 = e±iθ, 0 <θ < π para algun valor del parametro α.
Por definicion, la bifurcacion asociada con la aparicion de µ1 = 1 se denomina bifurcacion fold (otangente, como en el caso continuo). La bifurcacion asociada con la aparicion de µ1 = −1 se denominabifurcacion flip (o de doblamiento del periodo). Finalmente, la bifurcacion asociada con la aparicionde µ1,2 = e±iθ, 0 < θ < π se denomina bifurcacion de Neimark-Sacker (o Hopf secundaria).
En la bifurcacion flip, cuando el parametro independiente alcanza su valor crıtico, el punto fijoestable se convierte en inestable y adicionalmente aparece un ciclo de periodo dos. La bifurcacion defold tiene el mismo comportamiento que la bifurcacion con el mismo nombre del caso continuo. Labifurcacion de Neimark-Sacker se comporta de una forma equivalente a la de Hopf. En la figura 2.10se observan las bifurcaciones discretas.
2.6 Estado del arte
Los textos de electronica de potencia generalmente incluyen capıtulos dedicados al modelamiento desistemas de potencia que contienen elementos electronicos de conmutacion, por ejemplo [3], [6] y [7].Este tipo de desarrollo se realiza en convertidores DC-DC, como Buck, Boost y Buck-Boost.
15

Investigadores y trabajos realizados en la tematica
Un documento que profundiza en el analisis de bifurcaciones en convertidores DC-DC es el artıculo “Onsome Nonsmooth Bifurcations Appearing in Variable Structure Systems”[8], de los autores FabiolaAngulo, Mario di Bernardo y Gerard Olivar. En este se hace una introduccion a los sistemas nodeslizantes, sistemas Filippov y Sistemas de Impacto; se caracterizan algunas bifurcaciones encontradaspara el convertidor Buck. Ademas, se detallan los planos de fase generados cuando se cambia algunparametro del sistema, por ejemplo, utilizando un voltaje de control de la forma vcon = v(t) + Zi(t)(donde v(t) e i(t) son las variables de estado) y una condicion de conmutacion de la forma v(t)+Zi(t) =Vlow, se fijan valores de Vlow, Vin y se varia Z; seguidamente se cambia el valor de Vlow y nuevamentese varıa Z. Tambien se presentan planos de fase para el caso en el que se varıa Vin, manteniendo Vlow yZ constantes. De los mismos autores esta “Discontinuous Bifurcations in DC-DC Converters”[9]. Losanteriores dos artıculos son las referencias que originaron el desarrollo de este trabajo y se caracterizanpor la ley de control utilizada sobre el convertidor.
Otros artıculos donde participan este grupo autores, acompanados de investigadores como EnricFossas y S.J Hogan son: “On two-parameter non-smooth bifurcations in power converters”,“TecnicaZAD aplicada a un convertidor Buck: analisis de estabilidad y de transicion al caos”, “Feedback controlof limit cycles: a switching control strategy based on nonsmooth bifurcation theory” y “Control of Lim-it Cycle Amplitude Through Nonsmooth Bifurcations” y que corresponden a [10]- [13]. En el primery segundo artıculo se muestra el analisis realizado para obtener los de diagramas 2-dimensionales o2-parametricos de un convertidor Buck, controlado con la tecnica ZAD (Zero Average Dynamics).El tercer y cuarto artıculo corresponde al control de ciclos limites con base en la teorıa de bifurca-ciones de sistemas discontinuos, en estos se expone la sıntesis de una ley de control conmutado quepermite cambiar la amplitud de un ciclo lımite. Adicionalmente, Gerard Olivar tambien ha publicado“Non-smooth continuation of periodic orbits in a chaotic buck converter” [14] y “Two-dimensionalbifurcation diagrams with data acquisition” [15]. Muestran respectivamente, los diagramas de bi-furcacion para un Buck controlado por retroalimentacion de voltaje y comandado por PWM, y laobtencion de diagramas de bifurcacion a partir de la adquisicion de datos con LABVIEW.
Ademas de las publicaciones anteriormente citadas, Mario di Bernardo aparece como autor o coau-tor de las siguientes publicaciones: “Sliding Bifurcations: A Novel Mechanism for the Sudden Onsetof Chaos in Dry Friction Oscillators, “Local analysis of C-Bifurcations in n-Dimensional Piecewise-Smooth Dynamical Systems”, “Non-smooth phenomena in power converters: Stick-slip oscillationsand Grazing-sliding bifurcations”, “Controlling switching systems: a bifurcation approach”,“Slidingorbits and double spiral bifurcation diagrams in power electronic DC-DC converters” y “Switchings,bifurcations, and chaos in DC-DC converters. Consultar [17]- [21]. Estas publicaciones sobresalen porcontener los resultados de investigaciones basadas en el analisis sistemas discontinuos, suaves a trozoso no suaves (non-smooth), donde se observa la experimentacion con convertidores de potencia DC-DCprofundizando en el analisis y control de dinamicas no lineales como bifurcaciones, ciclos lımites, caosetc..
Por otra parte, se han llevado a cabo estudios sobre la dinamica de convertidores Buck conec-tados en paralelo, estos han estado a cargo, en su mayorıa, de los investigadores H. H. C. Iu de laUniversidad del Occidente de Australia y Chi. K. Tse de la Universidad Politecnica de Hong Kong.Estos artıculos ademas contienen el diseno de controladores en modo-corriente para diferentes re-ferencias de corriente, y examinan los fenomenos de bifurcacion que se presentan con la variacionde parametros; en los ejemplos presentados utilizan moduladores de ancho de pulso (PWM) para laconmutacion del elemento de control en los convertidores. Entre estas publicaciones estan: “Bifurca-tion in Parallel-Connected Buck Converters under Current-Mode Control” [22], “Bifurcation behavior
16

in parallel-connected buck converters” [23], “Bifurcation in parallel-connected buck converters undera democratic current sharing scheme´´ [24], “Effects of interleaving on the bifurcation behavior ofparallel-connected buck converters [25].
Otros investigadores que se destacan en el estudio y caracterizacion de bifurcaciones, y en el analisisde fenomenos no lineales en sistemas conmutados son:
• Banerjee Soumitro editor del libro [1] y coautor de los artıculos “Bifurcations in Two-DimensionalPiecewise Smooth MapsTheory and Applications in Switching Circuits” [26], “Bifurcations Dueto Transition From Continuous Conduction Mode to Discontinuous Conduction Mode in theBoost Converter” [27], “BorderCollision Bifurcations in the Buck Converter” [28], y “Anomalousbifurcations in DC-DC converters: borderline collisions in piecewise smooth maps” [29]. El primerartıculo trata sobre los fenomenos de bifurcacion 2-dimensionales que se presentan en sistemassuaves a trozos, tomando como ejemplo los circuitos conmutados y como caso particular elconvertidor DC-DC Boost, en el segundo artıculo se analizan las bifurcaciones presentadas en elconvertidor Boost ocasionadas por la transicion entre el modo de conduccion continuo al modode conduccion discontinuo, y el tercer y cuarto artıculo presentan las bifurcaciones presentadasen un Buck con realimentacion de corriente y como muchas de esas bifurcaciones se puedencaracterizan como borde-colision.
• Toshimichi Saito investigador de la Universidad de Tokio es coautor de“Switched dynamicalsystems with double periodic inputs: an analysis tool and its application to the buck-boostconverter” [30] que recopila el analisis de dinamicas presentas en el convertidor Buck-Boostpara senales de entrada 2-periodicas, el comportamiento periodico y caotico es comprobadocon un modelo del sistema en el laboratorio; “Analysis of interleaved converters with WTA-based switching” [31] y “Interleaved Buck Converters Based on Winner-Take-All Switching” [32]muestran los resultados de investigaciones con convertidores Buck interpolados usando la reglade conmutacion WTA (Winner-Take-All, Ganador toma todo), seleccionando adecuadamentelos parametros se puede lograr una sincronizacion polifasica automatica conveniente para lareduccion de la ondulacion de la corriente de salida, el esquema utiliza un arreglo de switches,diodos y bobinas que son conmutados de acuerdo con la WTA.
• Yue Ma de la Universidad de Tokushima en Japon ha sido coautor con C. K. Tse e HitsoshiKawakami de publicaciones como: “Bifurcation Analysis of Switched Dynamical Systems withPeriodically Moving Borders” [33], “Control of Bifurcations in DC/DC PWM Switching Convert-ers” [34], “Connecting Border Collision With Saddle-NodeBifurcation in Switched DynamicalSystems” [35] y “Analysis of bifurcation in switched dynamical systems with periodically mov-ing borders: application to power converters” [36]. En el primer artıculo analizan la dinamicade sistemas conmutados tomado al Buck como ejemplo, en el segundo se propone un metodopara analizar las bifurcaciones en el Buck y en el Boost. El tercero trata bifurcaciones silla-nodo en convertidores y en el cuarto artıculo se presenta un clasificacion y caracterizacion debifurcaciones encontradas en un Buck controlado con una retroalimentacion de voltaje y unPWM.
Otros trabajos de interes
Ademas de los anteriormente citados, [37] trata sobre bifurcaciones en sistemas discontinuos presentadoejemplos con sistemas mecanicos; los artıculos [38] - [44] hablan sobre el analisis de la dinamica enconvertidores de potencia DC-DC en general, utilizando como ejemplos el Boost y el Buck; [45]- [52]se especializan en el estudio del convertidor Buck y presentan resultados del estudio de dinamicasno lineales especıficamente para este convertidor. “Bifurcation diagrams of the Buck converter” [52]
17

se destaca porque persigue resultados similares a los propuestos para el desarrollo de esta tesis, sinembargo al igual que en la mayorıa de publicaciones, la estrategia de control con la que se desarrollaes muy diferente a la utilizada en este trabajo, lo que hace pertinentes los logros aquı presentados.
Herramientas computacionales
Una de las preocupaciones de los investigadores en fenomenos no lineales es el desarrollo de herramien-tas computacionales que permitan evidenciar las dinamicas de los sistemas. Entre estos trabajos sedestacan [4], [53] y [54], donde se muestra el desarrollo de aplicaciones implementadas en Matlab, perosolo para el analisis de la dinamica de sistemas suaves.
18

Capıtulo 3
Diagramas de Fase del Convertidor Buck
En este capıtulo se describe el procedimiento utilizado para obtener los diagramas de fase del conver-tidor DC-DC, configuracion Buck, iniciando por la descripcion del modelo matematico. Se presentala implementacion del modelo en Simulink, y la suavizacion del sistema para hallar los planos defase utilizando MATCONT. Tambien se utilizan los ficheros especialmente disenados para encontrarlos planos de fase de sistemas discontinuos (Filippov), desarrollados en la Universidad Politecnica deCataluna.
3.1 Modelamiento Matematico del Buck
Partiendo del sistema de la figura 2.1 se tiene que cuando el interruptor ’S’ esta cerrado, el modeloequivalente del circuito es el de la figura 3.1a y las ecuaciones diferenciales que describen la dinamicadel circuito son las descritas en la ecuacion (3.1).
Ldi
dt= Vin − v (3.1)
Cdv
dt= i− v
R
Cuando el interruptor ’S’ se encuentra abierto, la oposicion de la inductancia a los cambios bruscosde corriente hace que su voltaje polarice el diodo en directo y en consecuencia entre en conduccion. Elcircuito equivalente para este caso es el de la figura 3.1b y las ecuaciones diferenciales que describenel sistema para esta condicion de conmutacion se muestran en la ecuacion (3.2).
Figura 3.1: Convertidor Buck en lazo abierto
19

Figura 3.2: Convertidor Buck con la ley de control
Ldi
dt= −v (3.2)
Cdv
dt= i− v
R
El modelo del convertidor Buck se puede resumir en una sola ecuacion (3.3), donde u = 1 indica queel interruptor esta cerrado y u = 0 que el interruptor se encuentra abierto. Por lo tanto, la dinamicadel Buck es discontinua o tambien denominada suave a trozos, ya que esta definida por dos sistemaslineales que interactuan de acuerdo con una condicion de conmutacion. Estos sistemas tambien recibenel nombre de Sistemas Filippov (sistemas que poseen un campo vectorial discontinuo).
v
i
=
−1RC
1C
−1L 0
v
i
+
0
Vin
L
u (3.3)
El modelo de la dinamica del Buck tiene dos puntos de equilibrio, para u = 1 ubicado en P1 =(Vin, Vin
R ), y para u = 0 situado en P0 = (0, 0).
Para el sistema de interes y de acuerdo con [8] la conmutacion depende de la condicion impuestapor ley de control. Entonces, u = 0 si v(t) + Zi(t) > Vlow y u = 1 en otro caso. Observese, que la leyde control es una retroalimentacion de estados, donde la i es multiplicada por una impedancia Z. Deesta manera la senal retroalimentada corresponde a un voltaje vcon, que se compara con un voltajeumbral Vlow. En la figura 3.2 se observa el convertidor Buck con la ley de control.
Los valores iniciales de los parametros utilizados para realizar las simulaciones del modelo del Buckse encuentran en la tabla 3.1.
20

Tabla 3.1: Valores iniciales de los Parametros del Buck
PARAMETRO VALOR
R 22Ω
C 47µF
L 20mH
Z −10Ω
Vin 8 V
Vlow 5 V
Campo Vectorial
Ejemplos de sistemas dinamicos no suaves (non-smooth) se encuentran en muchos areas, como encircuitos electricos, sistemas mecanicos, robotica, economıa, etc. Estos sistemas dinamicos pueden serdivididos en tres tipos de sistemas dependiendo del grado de discontinuidad. Uno de estos tipos desistemas son los denominados sistemas de Filippov [56].
Del analisis del modelo del Buck se deduce que las orbitas descritas en el plano de fase del Buck,obedecen a un campo vectorial discontinuo. En los sistemas Filippov el campo vectorial, en la regionde discontinuidad, esta definido como en la ecuacion (3.4).
F = λf1 + (1− λ)f2, 0 ≤ λ = Hxf2Hx(f2−f1)
≤ 1 (3.4)
Donde F esta formado por una combinacion lineal de los campos f1 y f2, H es la funcion de laregion de conmutacion y Hx es la variacion de la region de conmutacion con respecto a las variablesde estado Hx = (∂H
∂v , ∂H∂i ).
Para el caso del Buck los campos estan determinados ası: f1 = (− 1CRv + 1
C i,− 1Lv), f2 = (− 1
CRv +1C i,− 1
Lv + Vin
L ) y la region de conmutacion H es la expresion 3.5.
H = v + Zi = Vlow H = v + Zi− Vlow = 0 (3.5)
Obteniendo Hx = (1, Z) y operando sobre 3.4, se llega a una expresion del campo vectorial de laforma F = (F1, F2), donde las componentes del campo F1 y F2 estan en terminos de las variablesde estado y de los parametros del controlador. La ecuacion (3.6) contiene el campo vectorial para elconvertidor Buck, en la region de conmutacion.
F = (− 1CRv + 1
C i, −( 2L + 1
ZCR )v − 1CZ i) (3.6)
Para que el modelo matematico del Buck este mas acorde con el comportamiento real del circuito,se pueden incluir las resistencias de perdida de los elementos pasivos. Para la bobina se supone unaresistencia en serie RL (para simplificar el analisis del modelo esta incluye tambien la resistencia shuntde la cual se toma la muestra de corriente para el controlador) y en el condensador se supone unaresistencia RC en paralelo. La figura 3.3 muestra el buck con las resistencias de los elementos pasivos.
El analisis se realiza como en el caso anterior, la figura 3.4 contiene los circuitos equivalentes paralas dos condiciones de conmutacion y en la ecuacion (3.7) y (3.8) estan las ecuaciones diferenciales paracada caso. Se observa como la dinamica del circuito contiene terminos asociados con las resistenciasde perdida.
21
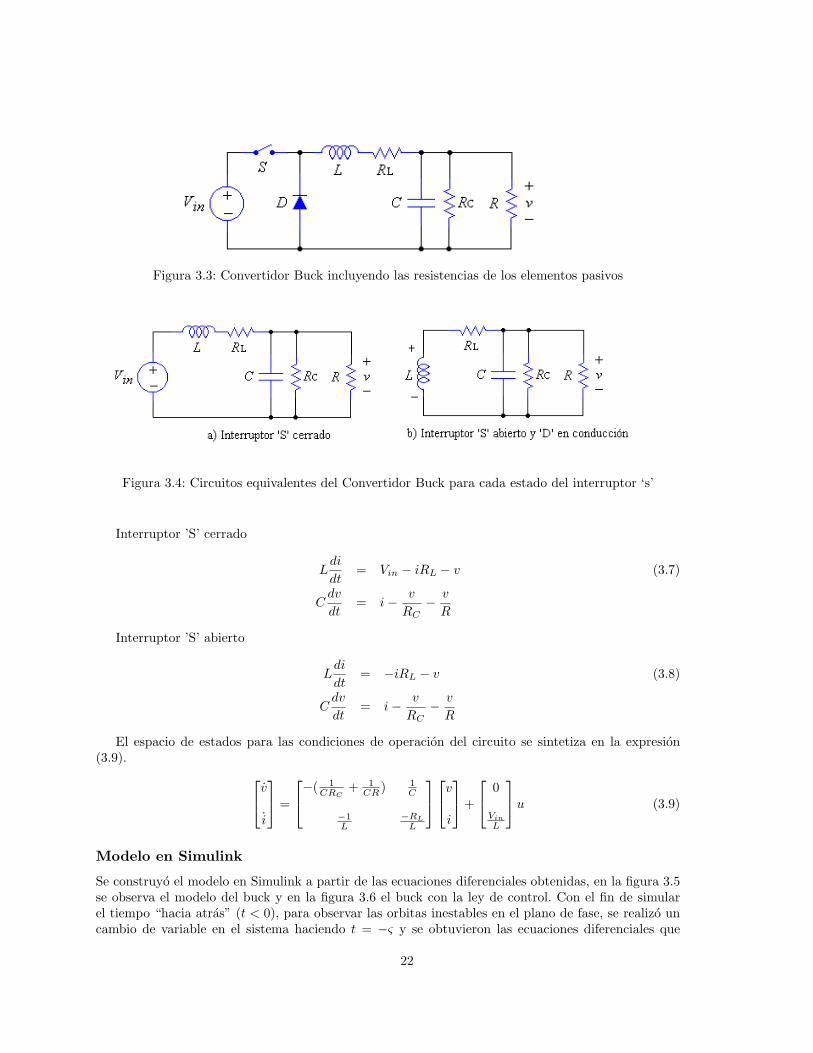
Figura 3.3: Convertidor Buck incluyendo las resistencias de los elementos pasivos
Figura 3.4: Circuitos equivalentes del Convertidor Buck para cada estado del interruptor ‘s’
Interruptor ’S’ cerrado
Ldi
dt= Vin − iRL − v (3.7)
Cdv
dt= i− v
RC− v
R
Interruptor ’S’ abierto
Ldi
dt= −iRL − v (3.8)
Cdv
dt= i− v
RC− v
R
El espacio de estados para las condiciones de operacion del circuito se sintetiza en la expresion(3.9).
v
i
=
−( 1
CRC+ 1
CR ) 1C
−1L
−RL
L
v
i
+
0
Vin
L
u (3.9)
Modelo en Simulink
Se construyo el modelo en Simulink a partir de las ecuaciones diferenciales obtenidas, en la figura 3.5se observa el modelo del buck y en la figura 3.6 el buck con la ley de control. Con el fin de simularel tiempo “hacia atras” (t < 0), para observar las orbitas inestables en el plano de fase, se realizo uncambio de variable en el sistema haciendo t = −ς y se obtuvieron las ecuaciones diferenciales que
22
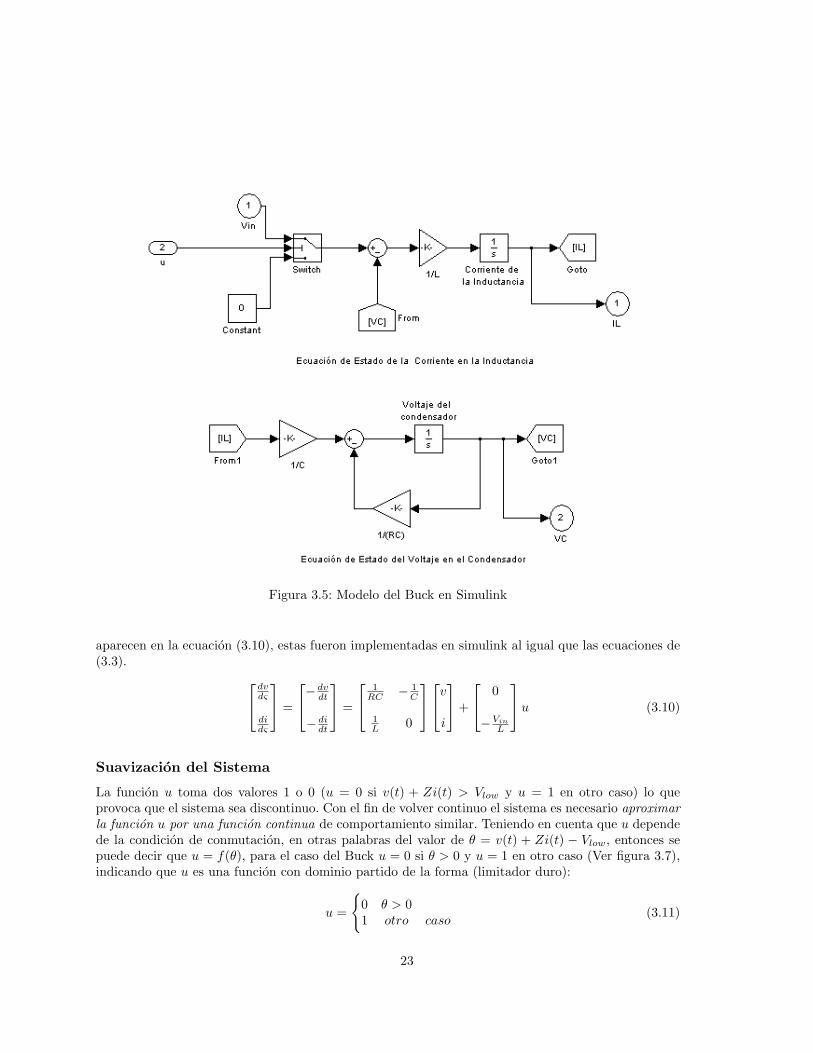
Figura 3.5: Modelo del Buck en Simulink
aparecen en la ecuacion (3.10), estas fueron implementadas en simulink al igual que las ecuaciones de(3.3).
dvdς
didς
=
−dv
dt
− didt
=
1RC − 1
C
1L 0
v
i
+
0
−Vin
L
u (3.10)
Suavizacion del Sistema
La funcion u toma dos valores 1 o 0 (u = 0 si v(t) + Zi(t) > Vlow y u = 1 en otro caso) lo queprovoca que el sistema sea discontinuo. Con el fin de volver continuo el sistema es necesario aproximarla funcion u por una funcion continua de comportamiento similar. Teniendo en cuenta que u dependede la condicion de conmutacion, en otras palabras del valor de θ = v(t) + Zi(t) − Vlow, entonces sepuede decir que u = f(θ), para el caso del Buck u = 0 si θ > 0 y u = 1 en otro caso (Ver figura 3.7),indicando que u es una funcion con dominio partido de la forma (limitador duro):
u =
0 θ > 01 otro caso
(3.11)
23
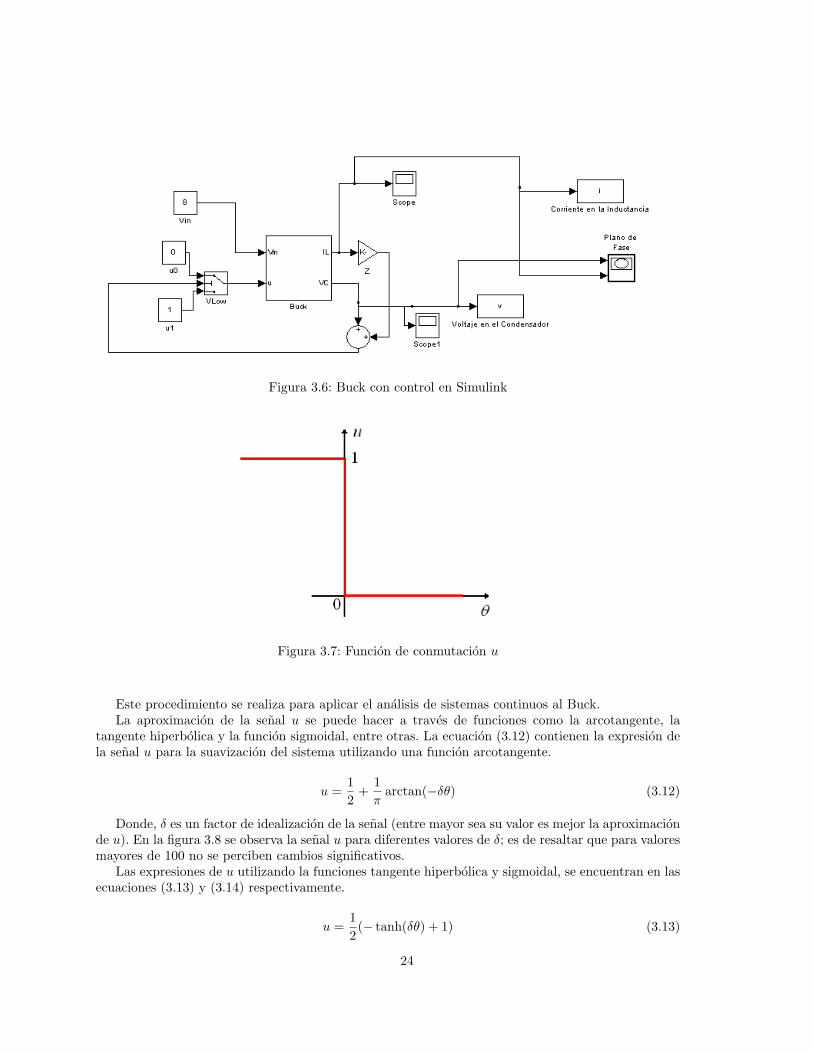
Figura 3.6: Buck con control en Simulink
Figura 3.7: Funcion de conmutacion u
Este procedimiento se realiza para aplicar el analisis de sistemas continuos al Buck.La aproximacion de la senal u se puede hacer a traves de funciones como la arcotangente, la
tangente hiperbolica y la funcion sigmoidal, entre otras. La ecuacion (3.12) contienen la expresion dela senal u para la suavizacion del sistema utilizando una funcion arcotangente.
u =12
+1π
arctan(−δθ) (3.12)
Donde, δ es un factor de idealizacion de la senal (entre mayor sea su valor es mejor la aproximacionde u). En la figura 3.8 se observa la senal u para diferentes valores de δ; es de resaltar que para valoresmayores de 100 no se perciben cambios significativos.
Las expresiones de u utilizando la funciones tangente hiperbolica y sigmoidal, se encuentran en lasecuaciones (3.13) y (3.14) respectivamente.
u =12(− tanh(δθ) + 1) (3.13)
24

−0.2 −0.1 0 0.1 0.2
0
0.2
0.4
0.6
0.8
1
θ
u
−10 −5 0 5 10
0
0.2
0.4
0.6
0.8
1
θ
u
δ=10
δ=100 δ=1000
Figura 3.8: Funcion de conmutacion u aproximada con arctan
−0.2 −0.1 0 0.1 0.2
0
0.2
0.4
0.6
0.8
1
−10 −5 0 5 10
0
0.2
0.4
0.6
0.8
1
u
θ
u
θ
tanh y sigmoidal
atan
Figura 3.9: Comparacion de funciones que aproximan a u, δ = 100
25

u = 1− 11 + e−δθ
(3.14)
La comparacion de los resultados obtenidos en la aproximacion de u con las tres funciones analizadasse muestra en la figura 3.9.
Despues de muchas pruebas se determino utilizar el mismo factor de idealizacion δ, para las tresfunciones. De la comparacion de las funciones se destaca el parecido, en la aproximacion de u, obtenidocon base en la funcion sigmoidal y en la funcion tangente hiperbolica, logrando una mejor aproximacionde la senal que cuando se uso la arcotangente.
Para obtener los planos de fase del sistema con MATCONT, se utilizo la expresion basada en lafuncion sigmoidal.
3.2 Planos de Fase para variaciones de R
Se obtuvieron planos de fase para diferentes valores de Resistencia, observando cambios en la dinamicacualitativa del sistema ante la variacion de este parametro (bifurcacion). En la figura 3.10 se observael plano de fase para los valores nominales de los parametros del buck (R = 22Ω). El atractor tienecomportamiento de foco estable. Para CI por fuera de la oscilacion (azul) (Ver figura 3.10b), el campoatraviesa la region de conmutacion en repetidas ocasiones antes de llegar al punto de equilibrio, laforma de onda del voltaje se observa en la figura figura 3.10c; esta caracterıstica solo se observo paraeste valor de R. Para CI dentro de la oscilacion (azul), no se observan oscilaciones en la forma de ondadel voltaje (Ver la figura 3.10d.)
En el analisis del sistema con el modelo del buck se observaron comportamientos diferentes paravalores de R 6= 22Ω, los cuales se detallan a continuacion:
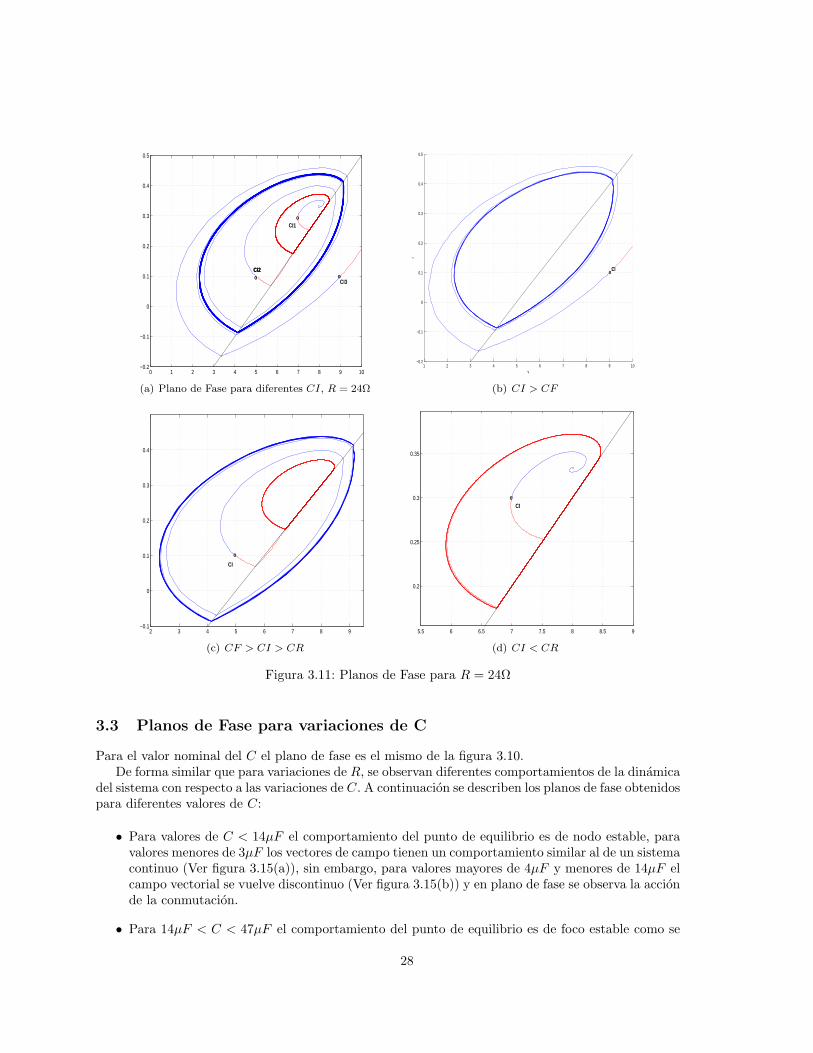
• Para valores de 22Ω < R < 26,2132Ω, se tienen dos ciclos limites uno estable (CF ) y el otro in-estable (CR), donde CF > CR (en la grafica estan demarcados con azul y rojo respectivamente,figura 3.11a), y se destacan tres casos. Primero, si las condiciones iniciales (CI) se encuentranfuera del ciclo limite estable la orbita busca este ciclo limite, y para t < 0 la orbita se va ainfinito (ver figura 3.11b). Segundo, si las CI estan por fuera del ciclo limite inestable la orbitase va para el ciclo estable, sin embargo, para t < 0 tiende hacia el inestable (Ver figura 3.11c).Por ultimo, para CI dentro del ciclo limite inestable el comportamiento del punto de equilibrioes de foco estable para t > 0 y para t < 0 se observa deslizamiento por la region de conmutacionantes de que la orbita busque el ciclo inestable (Ver figura 3.11d).
• Si R > 26,2132Ω entonces aparece un ciclo estable que aumenta de amplitud cuando el valorde R crece. En la figura 3.12a se observan los planos de fase para R = 27Ω (de color verde), yR = 90Ω (de color azul) (el valor de 90Ω puede resultar exagerado si se piensa en el circuitoreal, sin embargo, la intencion es mostrar que el comportamiento de “ciclo limite” se mantieneaun para valores grandes de R). En la figura 3.12c se observa la forma de onda del voltaje paraR = 27Ω. Para t < 0 se observo deslizamiento, y la orbita termina en la region de conmutacion;la figura 3.12b contiene los resultados obtenidos para R = 27 (de color naranja) y R = 90 (decolor rojo).
• Para 8,42Ω < R < 22Ω, la dinamica del punto de equilibrio es de foco estable (Ver figura 3.13),y las orbitas para t < 0 presentan deslizamiento cuando las CI estan proximas a la region deconmutacion (representadas en el grafico por ‘o’).
• Cuando R < 8,42Ω, la dinamica del punto de equilibrio es de nodo estable, (Ver figura 3.14).
26

Vlow<0
Vlow>0
2 3 4 5 6 7 8 9 10−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
v
i
(a)
0 2 4 6 8 10 12−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
v
i
o
o
o
o
(b)
Vlow<0
Vlow>0
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.082
3
4
5
6
7
8
9
10
t
v
(c) Voltaje cuando existe conmutacion
Vlow<0
Vlow>0
0 0.005 0.01 0.015 0.023
4
5
6
7
8
9
10
t
v
(d) Voltaje para CI dentro de la oscilacion(azul)
Figura 3.10: Planos de fase y formas de onda del voltaje para valores nominales del buck
27
0 1 2 3 4 5 6 7 8 9 10−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
CI1
o
o
CI2 o
CI2
CI3
(a) Plano de Fase para diferentes CI, R = 24Ω
1 2 3 4 5 6 7 8 9 10−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
v
i
CI o
(b) CI > CF
2 3 4 5 6 7 8 9−0.1
0
0.1
0.2
0.3
0.4
CI
o
(c) CF > CI > CR
5.5 6 6.5 7 7.5 8 8.5 9
0.2
0.25
0.3
0.35
CI o
(d) CI < CR
Figura 3.11: Planos de Fase para R = 24Ω
3.3 Planos de Fase para variaciones de C
Para el valor nominal del C el plano de fase es el mismo de la figura 3.10.De forma similar que para variaciones de R, se observan diferentes comportamientos de la dinamica
del sistema con respecto a las variaciones de C. A continuacion se describen los planos de fase obtenidospara diferentes valores de C:
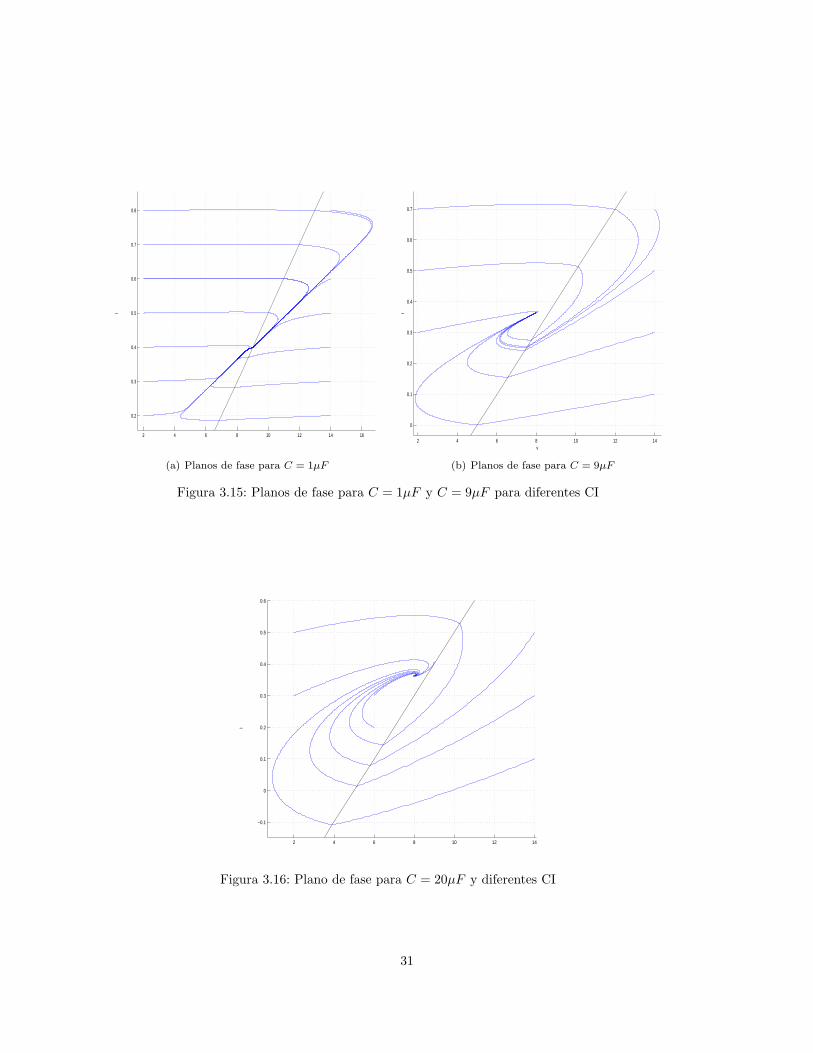
• Para valores de C < 14µF el comportamiento del punto de equilibrio es de nodo estable, paravalores menores de 3µF los vectores de campo tienen un comportamiento similar al de un sistemacontinuo (Ver figura 3.15(a)), sin embargo, para valores mayores de 4µF y menores de 14µF elcampo vectorial se vuelve discontinuo (Ver figura 3.15(b)) y en plano de fase se observa la accionde la conmutacion.
• Para 14µF < C < 47µF el comportamiento del punto de equilibrio es de foco estable como se
28

−10 −5 0 5 10 15 20−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v
i
CI1
o
o CI2
(a) Planos de fase para t > 0
2 3 4 5 6 7 8−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
v
i
o CI
(b) Planos de fase para t < 0
Vlow<0
Vlow>0
0 0.01 0.02 0.03 0.04 0.050
1
2
3
4
5
6
7
8
9
10
t
v
(c) Forma de onda del voltaje para R = 27Ω
Figura 3.12: Dinamica cualitativa para R = 27Ω y R = 90Ω
29

0 2 4 6 8 10 12
−0.2
0
0.2
0.4
0.6
0.8
v
i
o
o o
x
x
Figura 3.13: Plano de fase para R = 19Ω
2 3 4 5 6 7 8 9 10−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
v
i
(a) Planos de fase para t > 0
Vlow<0
Vlow>0
0 0.005 0.01 0.015 0.024
5
6
7
8
9
10
t
v
(b) Forma de onda del Voltaje
Figura 3.14: Plano de fase y forma de onda del voltaje para R = 7Ω
30
2 4 6 8 10 12 14 16
0.2
0.3
0.4
0.5
0.6
0.7
0.8
i
(a) Planos de fase para C = 1µF
2 4 6 8 10 12 14
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
v
i
(b) Planos de fase para C = 9µF
Figura 3.15: Planos de fase para C = 1µF y C = 9µF para diferentes CI
2 4 6 8 10 12 14
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
i
Figura 3.16: Plano de fase para C = 20µF y diferentes CI
31

−2 0 2 4 6 8 10 12 14−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
v
i
CI 1 CI 2
CI 3
o o
o
(a) Planos de fase para C = 70µF
7.8 7.85 7.9 7.95 8 8.05 8.1 8.15
0.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
CI 1o
o CI 2
(b) Planos de fase para C = 10mF
Figura 3.17: Planos de fase para C > 47µF
observa en la figura 3.16
• Cuando C > 47µF la dinamica del sistema tiene dos regiones de atraccion (Ver figura 3.17(a)),se observa la aparicion de una orbita periodica estable (azul) y una inestable (rojo), para CIinternas a la orbita inestable el comportamiento del punto de equilibrio es de foco estable, para CIentre la orbita inestable y la estable la dinamica del sistema busca la orbita estable, esto mismosucede cuando las CI estan por fuera de la orbita estable. Este comportamiento se mantienepara valores de C >> 47µF , en la figura 3.17(b) se observan condiciones iniciales dentro de laorbita inestable para un C = 10mF que no es un valor practico en el circuito real (la oscilaciontiene valores aproximados de 84.4V).
3.4 Planos de Fase para variaciones de L
Los planos de fase obtenidos para las variaciones de la inductancia tiene las siguientes caracterısticas:
• Para valores de L < 20mH en el plano de fase se observan dos ciclos limites uno estable y el otroinestable, el punto de equilibrio queda dentro del ciclo inestable y para valores de CI internasa este ciclo el punto se comporta como un foco estable. Si las CI estan entre los dos ciclos, laorbita tiende al ciclo estable (Ver figura 3.18(a)). A medida que disminuye el valor de L aumentala amplitud del ciclo limite.
• Para valores de 20mH < L < 88mH el punto de equilibrio se comporta como foco estable (Verfigura 3.18(b).
• Por ultimo, para valores mayores L > 88mH, el punto de equilibrio se comporta como nodoestable como se observa en la figura 3.18(c)
32

−2 0 2 4 6 8 10 12 14−0.5
0
0.5
1
v
i
o
o
o
(a) Plano de fase para L = 10mH
0 5 10 15
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
i
(b) Plano de fase para L = 30mH
2 4 6 8 10 12 14
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
v
i
(c) Plano de fase para L = 200mH
Figura 3.18: Planos de fase para diferentes valores de L
3.5 Planos de Fase para variaciones de Vin
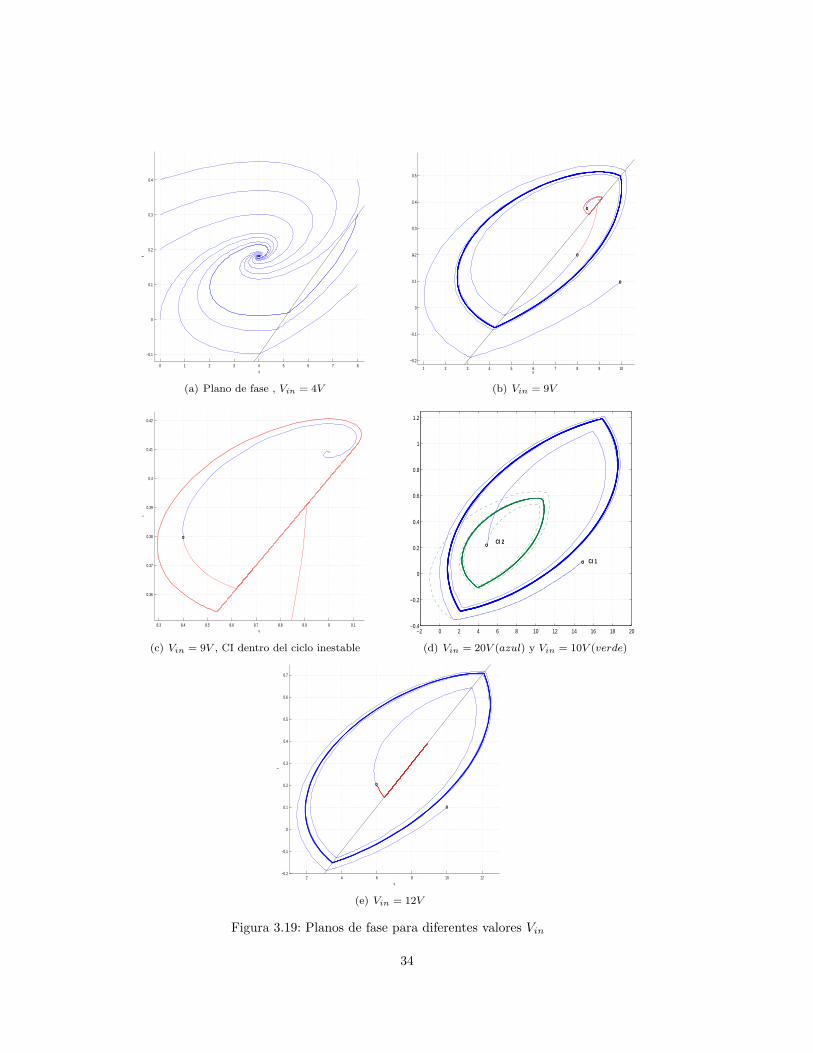
Para variaciones de Vin se observa que la dinamica cambia considerablemente alrededor de 9V. Ladescripcion de los planos de fase que se obtuvieron para los diferentes valores de Vin se presenta acontinuacion:
• Cuando Vin < 9V el punto de equilibrio se comporta como un foco estable como se muestra enla figura 3.19(a), y se observa el efecto de la conmutacion cuando las CI quedan a la izquierdade la region de conmutacion.
• Si Vin = 9V (Ver figura 3.19(b)) se observan dos ciclos limites uno estable (de color azul) y unoinestable (de color rojo), al igual que en los casos presentados anteriormente, para CI por fueradel ciclo inestable las lıneas de campo buscan el ciclo limite estable y para CI dentro de la orbitainestable las lıneas de campo se dirigen hacia el punto de equilibrio que se comporta como unfoco estable (Ver figura 3.19(c)).
33
0 1 2 3 4 5 6 7 8
−0.1
0
0.1
0.2
0.3
0.4
v
i
(a) Plano de fase , Vin = 4V
1 2 3 4 5 6 7 8 9 10
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
v
i
o
o
o
(b) Vin = 9V
8.3 8.4 8.5 8.6 8.7 8.8 8.9 9 9.1
0.36
0.37
0.38
0.39
0.4
0.41
0.42
v
i
o
(c) Vin = 9V , CI dentro del ciclo inestable
−2 0 2 4 6 8 10 12 14 16 18 20−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
CI 1
CI 2
o
o
(d) Vin = 20V (azul) y Vin = 10V (verde)
2 4 6 8 10 12−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
v
i
o
o
(e) Vin = 12V
Figura 3.19: Planos de fase para diferentes valores Vin
34

0 2 4 6 8 10 12
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
(a) Plano de fase , Z = −20Ω
2 3 4 5 6 7 8 9
−0.1
0
0.1
0.2
0.3
0.4
v
i
CI 1
CI 2
o
o
o CI 3
(b) Z = −9Ω
2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
v
i
o
(c) Z = 10Ω
Figura 3.20: Planos de fase para diferentes valores Z
• Para valores de Vin > 9V los ciclos limites aumentan su amplitud a medida que el voltaje Vin
aumenta (Ver figura 3.19(d)). Como se observa en la figura 3.19(e) para t < 0 el vector de campomuestra deslizamiento sobre la region de conmutacion.
3.6 Planos de Fase para variaciones de Z
Las variaciones de la impedancia de la ley de control Z producen cambios en la recta de conmutacionv(t) = −Zi(t) + Vlow (Z cambia la pendiente de la recta de conmutacion).
• Si Z < −10Ω la dinamica es la de un foco estable como se observa en la figura 3.20(a).
• Para valores de −10Ω < Z < 0Ω se presentan dos ciclos limites uno estable y el otro inestablede forma similar que en los casos anteriores. Para CI dentro del ciclo limite inestable el vector
35
de campo tiende hacia el punto de equilibrio el cual se comporta como un foco estable. Para CIpor fuera del ciclo inestable el vector se dirige hacia el ciclo limite estable (Ver figura 3.20(b)).
• Cuando se tienen valores de Z ≈ 0Ω solamente se observa el ciclo limite estable.
• Para valores de Z > 0Ω la dinamica cualitativa del sistema es la de un nodo estable 3.20(c)). Sedestaca la aparicion de un nuevo punto de equilibrio.
3.7 Planos de Fase para variaciones de Vlow
Cuando se producen cambios en Vlow se cambia la region de conmutacion (intercepto con el eje de v)y los vectores campo cambian de acuerdo con este parametro de la siguiente manera:
• Si Vlow > 5V el punto de equilibrio se comporta como un foco estable, en la figura 3.21(a) seobserva un ejemplo de esta condicion cuando Vlow = 10V .
• Cuando 0 < Vlow < 5V se tiene dos casos cuando: Vlow < 5V , pero es cercano a 5V , se observala formacion de dos ciclos limites (Ver figura 3.21(b)) uno estable (color azul) y el otro inestable(color rojo), para CI dentro del ciclo inestable el punto de equilibrio se comporta como focoestable. El otro caso es para 0 < Vlow < 5V , por ejemplo Vlow = 3V , en la figura 3.21(c) seobserva la formacion de un ciclo limite estable pero para (t < 0) solo existe deslizamiento sobrela recta de conmutacion.
• Para −0,75 < Vlow < 0, se observa la aparicion de un ciclo limite estable (azul) y uno inestable(rojo)(Ver figura 3.21(d)), el punto de equilibrio cambia a P (0, 0); CI dentro del ciclo limiteinestable tienden al punto de equilibrio el cual se comporta como foco estable, y para CI porfuera del ciclo inestable los vectores de campo van hacia el ciclo estable.
• Para Vlow < 0,75 punto de equilibrio se comporta como foco estable, (Ver figura 3.21(e)).
Los cambios en la dinamica cualitativa del sistema, causados por la variacion de un parametro(bifurcacion), se pueden resumir en cuatro situaciones:
La primera cuando la variacion del parametro ocasiona en el plano de fase dos regiones de atracciondelimitadas por un ciclo limite inestable, para CI dentro del ciclo limite inestable el vector de campobusca el punto de equilibrio el cual se comporta como un foco estable (Para los casos t < 0 las orbitasinestables presentaban deslizamiento sobre la region de conmutacion). Un ejemplo interesante de estecaso fue cuando Vlow tenıa un valor negativo cercano a cero y se observo como el punto de equilibrioactivo paso a ser P (0, 0). La segunda cuando existen ciclos estables pero no hay orbitas inestable ypara t < 0 existe deslizamiento. El tercer caso cuando la variacion del parametro hace que el punto deequilibrio se comporte como foco estable y no se observa la aparicion de ciclos limites. Y finalmente,el cambio en el parametro ocasiona que el punto de equilibrio se comporte como nodo estable sinpresencia de ciclos limites.
La tabla 3.2 resume la situaciones encontradas en los planos de fase, y los rangos de variacion delos parametros.
36

CI 1
CI 2
o
o
o CI 3
−4 −2 0 2 4 6 8 10 12 14 16
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v
i
(a) Plano de fase , Vlow = 10V
2 3 4 5 6 7 8 9
−0.1
0
0.1
0.2
0.3
0.4
0.5
v
i
CI 1 CI 2
o
o
o
CI 3
(b) Vlow = 4,8V , CI dentro del ciclo inestable
0 1 2 3 4 5 6 7 8 9−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
v
i
CI 1
CI 2
o
o
(c) Vlow = 3V
−1 0 1 2 3 4 5
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
v
i
CI 1
CI 2
o
o
o CI 3
(d) Vlow = −0,6V (azul)
−5 0 5 10 15 20
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
v
i
(e) Vlow = −5V
Figura 3.21: Planos de fase para diferentes valores Vlow
37

Tabla 3.2: Cambio en la dinamica de acuerdo con la variacion de los parametros
Parametro CF > CR CF y Foco Nodo
deslizamiento (t < 0) Estable Estable
R 22Ω < R < 26,2132Ω R > 26,2132Ω 8,42Ω < R < 22Ω R < 8,42Ω
C C > 47µF - - 14µF < C < 47µF C < 14µF
L L < 20mH - - 20mH < L < 88mH L > 88mH
Z −10Ω < Z < 0Ω - - Z < −10Ω Z > 0Ω
Vin Vin = 9V Vin > 9V Vin < 9V
Vlow Vlow cercanos a 5V y 0 < Vlow < 5V Vlow > 5V y
−0,75V < Vlow < 0 Vlow < −0,75V
Figura 3.22: Circuito utilizado en la Simulacion
38

(a) Plano de fase para R = 22Ω (b) Formas de onda del Voltaje y la Corriente
Figura 3.23: Planos de fase para valores nominales del Buck
3.8 Simulacion del Circuito
En esta seccion se presentan la simulaciones para algunas de las situaciones que se consideraroninteresantes en el analisis de los planos de fase. Esta simulaciones se realizaron en ORCAD.
El circuito utilizado para realizar las simulaciones se observa en la figura 3.22.Se coloco una resistencia en serie con la inductancia de 0,1Ω con el fin de medir la corriente a
partir de la caıda de tension en la resistencia, el voltaje de la resistencia es llevado a un amplificadorde instrumentacion que referencia el voltaje a tierra, el voltaje de salida del amplificador de instru-mentacion es enviado directamente al circuito comparador con el voltaje Vlow, en el caso de Z > 0.Para el caso donde Z < 0, se utiliza adicionalmente, un amplificador inversor.
Los resultados obtenidos en la simulacion coinciden en alto grado con los obtenidos a partir delmodelo, las diferencias principales radican en la saturacion de los opamp y la dinamica del elementode conmutacion la cual se evidencia en el valor del punto de equilibrio. Lo anterior debido a que en elMOSFET existe una caıda de tension.
En la figura 3.23(a) se presenta el plano de fase obtenido para los valores nominales. Notese que nose observan oscilaciones antes de llegar al punto de equilibrio como las que se presentan en la figura3.10, sin embargo, el comportamiento sigue siendo el de un foco estable. La figura 3.23(b) presentalas formas de onda de la corriente y el voltaje para los valores nominales del buck.
Variaciones de R
Se hicieron variaciones de R tomando como referencia los resultados obtenidos a partir del analisisdel modelo con MATCONT, como se indica en la tabla 3.2. Se presentan cambios representativos enla dinamica del modelo del buck para diferentes intervalos del valor R.
En la figura 3.24(a) se observa el plano de fase para una resistencia R = 7Ω, para una condicioninicial, este comportamiento es similar al que fue analizado en la seccion anterior en la figura 3.14.Para los casos presentados en esta figura partiendo de diferentes condiciones iniciales el punto deequilibrio se comporta como un nodo.
Aunque la bifurcacion no se presenta sobre R = 26,2132Ω, a partir de aproximadamente 27Ω elcomportamiento deja de ser foco y aparecen oscilaciones. En el caso de R = 27Ω, se pudieron detectar
39

(a) Plano de fase, R = 7Ω (b) R = 27Ω,CI fuera del ciclo estable
(c) R = 27Ω, CI dentro del ciclo estable (d) R = 27Ω, CI dentro del ciclo estable
Figura 3.24: Planos de fase para diferentes valores R
en la simulacion dos regiones de atraccion, que hacıan que la orbita fuera a un foco o a un ciclo limiteestable. Sin embargo, debido a que en el simulador de circuitos no fue posible analizar en t < 0, nose conoce la frontera exacta que divide las regiones de atraccion. En la figura 3.24(b) se observa elplano de fase para CI fuera del ciclo limite estable, las figuras 3.24(c) y 3.24(d) presentan planos defase para CI dentro del ciclo lımite estable. Se observa como en el primer caso la orbita tiende al ciclolimite, pero en el segundo, la orbita busca el punto de equilibrio que se comporta como foco estable.
Variaciones de C
Se presentan tres casos, el primero cuando C = 9µF y el punto de equilibrio se comporta como nodoestable; el segundo cuando C = 20µF donde el punto de equilibrio se comporta como foco establey coincide con el analisis realizado sobre el modelo del buck (Ver figura 3.16) y el tercero cuandoC = 70µF que tambien se comporta como foco estable. En este ultimo caso se observa ondulacionesen el plano de fase las cuales son causadas por el Modo de Conduccion Discontinuo MCD (la corriente
40

(a) Plano de fase para C = 9µF (b) Plano de fase para C = 20µF
(c) Plano de fase para C = 70µF
Figura 3.25: Planos de fase para variaciones de C
se hace cero); en el modelo del buck para esta condicion de C se presentan dos regiones de atraccion.
Variaciones de L
Se analizaron valores pequenos de L donde se observan orbitas que presentan ondulaciones causadaspor MCD. Para el caso de L = 200mH, el comportamiento fue el mismo que se obtuvo con el analisisdel modelo (Ver figuras 3.18(c) y 3.26(b))
Variaciones de Z
Para valores de Z = 10Ω el comportamiento del modelo y del circuito es similar, como se observaen las figuras 3.20(c) y 3.27(a), sin embargo para el plano de fase obtenido en orcad se evidencia“chattering” sobre la region de conmutacion . Para el caso Z = −20Ω se observa como el punto de
41
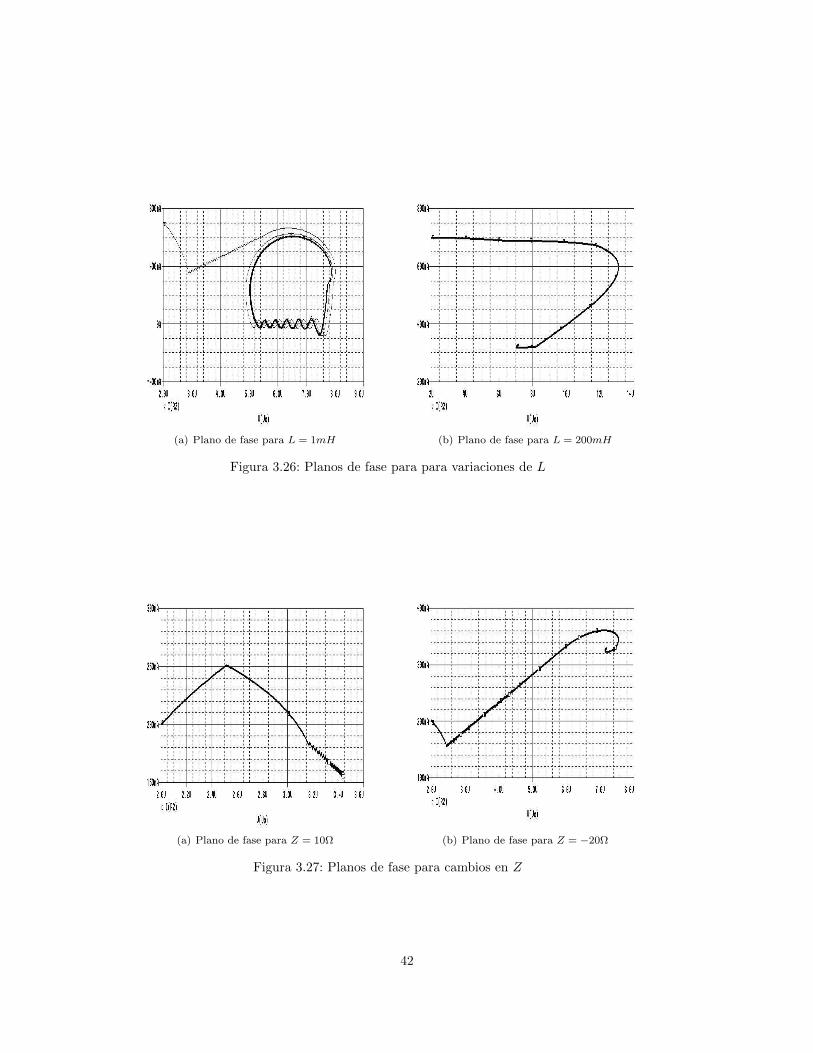
(a) Plano de fase para L = 1mH (b) Plano de fase para L = 200mH
Figura 3.26: Planos de fase para para variaciones de L
(a) Plano de fase para Z = 10Ω (b) Plano de fase para Z = −20Ω
Figura 3.27: Planos de fase para cambios en Z
42

(a) Plano de fase para Vlow = 10V (b) Plano de fase para Vlow = −5V
Figura 3.28: Planos de fase para cambios en Vlow
equilibrio se comporta como foco estable, pero en el circuito se observa un deslizamiento sobre laregion de conmutacion antes de llegar al foco (Ver figura 3.27(b)).
Variaciones de Vlow
En el analisis de Vlow se tomaron dos casos cuando Vlow > 0 y cuando Vlow < 0, en las figuras 3.28(a)y 3.28(b) se observa que el comportamiento descrito por el circuito coincide en alto grado con el delmodelo (Ver figuras 3.21(e) y 3.21(a)). Cuando Vlow es negativo el punto de equilibrio cambia a (0, 0),sin embargo, para el circuito se observan ondulaciones causadas por el MCD.
Variaciones de Vin
Para Vin = 4, debido a que se tiene como referencia un voltaje mayor al de la entrada, entonces, elsistema evoluciona hacia el punto de equilibrio (0, 0) (Ver figura 3.29(a)), en este caso no coincide conlo obtenido en el modelo (Ver figura 3.19(a)). Para valores de 9V < Vin < 20V se presentan cicloslimites estables (Ver figuras 3.29(d) y 3.29(e)), para 5V < Vin < 10V y Vin > 20V el comportamientoes de foco estable, cambia con respecto al modelo debido a que en el circuito los opamp se saturan.La dinamica cualitativa del sistema cambia a partir de V in = 9V .
Oscilograma
Se realizo el montaje experimental y se obtuvieron oscilogramas con el circuito real. En la figura 3.30se muestra un oscilograma obtenido para valores de R = 20Ω, Z = 10Ω, Vlow = 5V y condicionesiniciales iguales a cero, en este se observa el efecto “chattering” en el circuito real. Se debe teneren cuenta que el plano de fase del oscilograma difiere un poco de los planos de fase del modelodel convertidor (Ver figura 3.20c y 3.27a) ya que en este intervienen dinamicas asociadas con losamplificadores operacionales y el elemento de conmutacion -para el caso un MOSFET-.
43

(a) Plano de fase, Vin = 4V (b) Plano de fase, Vin = 22V
(c) Plano de fase, Vin = 9V
(d) Vin = 19V , CI fuera del ciclo estable (e) Vin = 19V , CI dentro del ciclo estable
Figura 3.29: Planos de fase para diferentes valores Vin
44

Figura 3.30: Osiclograma
45


Capıtulo 4
Diagramas de Bifurcacion del ConvertidorBuck
En este capıtulo se muestran los diagramas de bifurcacion para la variacion de los diferentes paramet-ros, los cuales fueron obtenidos con la aplicacion MATCONT (Ver [54]) a partir del modelo presentadoen el capitulo anterior. Para encontrar los diagramas de bifurcacion se utilizo una senal de conmutacionsuavizada por la funcion arcotangente y un factor de idealizacion δ = 100.
4.1 Diagramas de Bifurcacion del Convertidor Buck variando R
Se encontro el diagrama de bifurcacion del convertidor Buck variando la resistencia entre 0Ω y 30Ω.Se presenta una bifurcacion tipo Hopf en 26,2132Ω, el diagrama de bifurcacion obtenido se muestraen la figura 4.1, en este se observa como el valor de voltaje se mantiene constante hasta el valor de Rdonde se produce la bifurcacion y despues se decrementa formando una parabola.
Cambiando el valor de los parametros V low, Z, y Vin, a valores dentro de los intervalos definidos
0 5 10 15 20 25 30 35 40 45 50
6.5
7
7.5
8
8.5
R
v
H
Figura 4.1: Diagrama de Bifurcacion del Buck para variaciones de R
47

0 5 10 15 20 25 30 35 40 45 50
5
6
7
8
9
10
11
12
13
R
v
H
H
H Vin=8
Vin=12
Vin=5
Vin=9
Vin=6
(a) Bifurcaciones de R para diferentes valores de Vin
10 20 30 40 50 60 70 806
6.5
7
7.5
8
8.5
R
v
H H H
Z=−10
Ω Z=−12 Ω Z=−20 Ω
(b) Bifurcaciones de R para diferentes valores de Z
0 500 1000 1500 2000 2500 30000.01
0.015
0.02
0.025
0.03
0.035
R
v
H
(c) Bifurcaciones de R para Vlow = −1V
−2 0 2 4 6 8 10 12 14 16 18
x 104
2.5457
2.5458
2.5458
2.5458
2.5458
2.5458
2.5459
2.5459
x 10−3
R
v
H
(d) Bifurcaciones de R para Vlow = −10V
Figura 4.2: Diagramas de bifurcaciones para variaciones de R
48

5 10 15 20 25 30 35 40
4
5
6
7
8
9
R
v
H
Figura 4.3: Ciclos Limites
en la tabla 3.2 del capıtulo anterior; y hallando nuevamente el diagrama de bifurcacion con respecto aR, para cada caso, se observo como el diagrama se modificaba dependiendo del parametro cuyo valorse modifique (Ver figura 4.2). Para variaciones de C y L el diagrama no mostro ningun cambio.
A continuacion se describen los cambios presentados en el diagrama de bifurcacion con respecto aR, ocasionados por variar adicionalmente el valor de otro parametro:
• En la figura 4.2(a) se observa como a medida que se disminuye el valor del voltaje de entradaVin, aumenta el valor de R al cual se presenta la bifurcacion, por ejemplo,para Vin = 12V labifurcacion se presenta cerca a 18Ω.
• Cuando se establece Z en valores menores del nominal (Z = −10Ω) la bifurcacion se producepara un valor mayor de resistencia de cargaR (Ver figura 4.2(b)); para valores de Z > −9Ω elalgoritmo no converge.
• Por ultimo, en las figuras 4.2(c) y 4.2(d)se muestran respectivamente diagramas de bifurcacionesde R para Vlow = −1V y Vlow = −10V . En estos se observan la aparicion de bifurcaciones Hopfpara valores de R muy grandes no utilizados como condiciones de operacion del circuito. ParaVlow = −1V la bifurcacion se presenta en R = 1754,82Ω y para Vlow = −10V se presenta enR = 167191,25Ω.
En la figura 4.3 se observan los ciclos limites inestables sobre el diagrama de bifurcacion de R, conlos demas parametros en valores nominales, los cuales corresponden a las orbitas inestables observadasen los planos de fase del capıtulo 3.
4.2 Diagramas de Bifurcacion para variaciones de C
El diagrama de bifurcacion para variaciones de C siempre tiene forma de linea recta con pendientecero y con valores nominales en los demas parametros no se observo la presencia de bifurcaciones.Sin embargo, al variar el valor nominal de los parametros Vlow o R se detectaron bifurcaciones Hopfpara valores de C que no se dan en la practica, por ejemplo, cambiando Vlow a un valor negativo labifurcacion se presenta en C = 89,34mF , (Ver figura 4.4). Para Vlow > 0 no se observaron bifurcacionescon este valor de R.
49
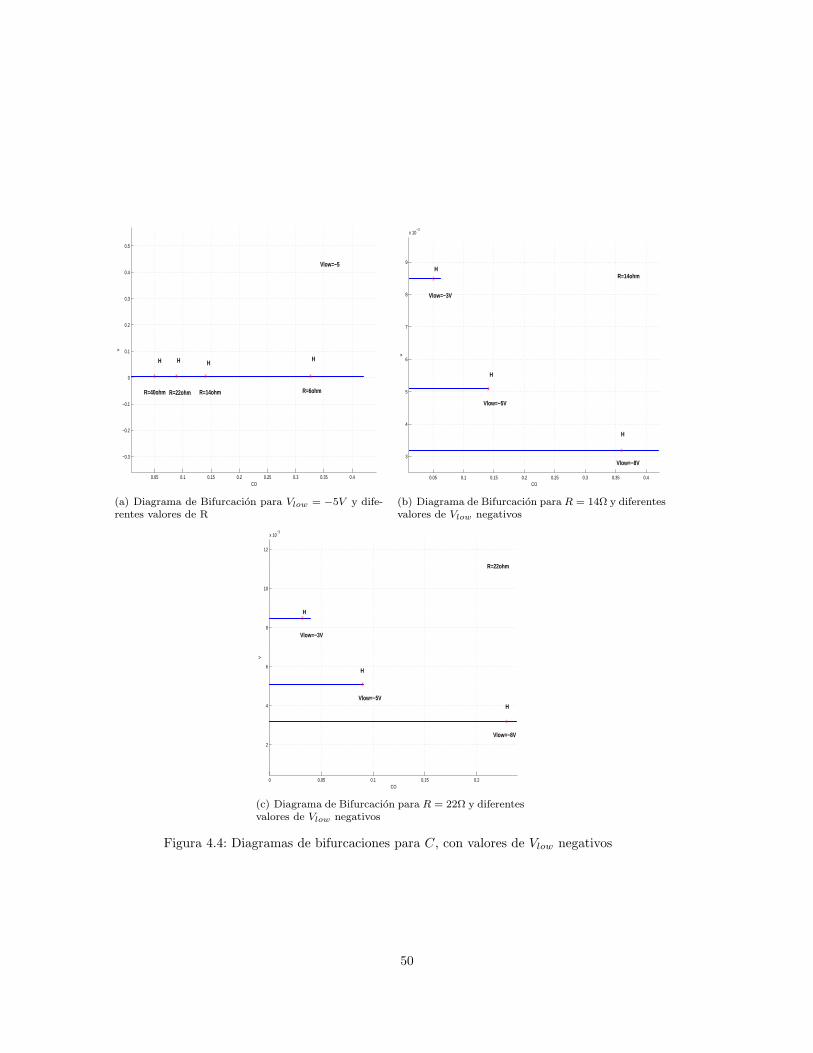
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
CO
v
H H H H
R=6ohmR=22ohmR=40ohm R=14ohm
Vlow=−5
(a) Diagrama de Bifurcacion para Vlow = −5V y dife-rentes valores de R
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
3
4
5
6
7
8
9
x 10−3
CO
v
H
H
H
Vlow=−5V
Vlow=−3V
Vlow=−8V
R=14ohm
(b) Diagrama de Bifurcacion para R = 14Ω y diferentesvalores de Vlow negativos
0 0.05 0.1 0.15 0.2
2
4
6
8
10
12
x 10−3
CO
v
H
H
H
R=22ohm
Vlow=−3V
Vlow=−5V
Vlow=−8V
(c) Diagrama de Bifurcacion para R = 22Ω y diferentesvalores de Vlow negativos
Figura 4.4: Diagramas de bifurcaciones para C, con valores de Vlow negativos
50

0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
7.995
7.9955
7.996
7.9965
7.997
7.9975
7.998
7.9985
7.999
CO
v
H
H
H
Vlow=10V
R=10ohm
R=14ohm
R=22ohm
(a) Diagrama de Bifurcacion para Vlow = 10V y dife-rentes valores de R
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
7.985
7.99
7.995
8
H
H
H
v
CO
Vlow=5V
Vlow=10V
Vlow=20V
R=14ohm
(b) Diagrama de Bifurcacion para R = 14Ω y diferentesvalores de Vlow positivos
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
7.985
7.99
7.995
8
8.005
CO
v
H
H
Vlow=20V
Vlow=10V
R=22ohm
(c) Diagrama de Bifurcacion para R = 22Ω y diferentesvalores de Vlow positivos
Figura 4.5: Diagramas de bifurcaciones para C, con valores de Vlow positivos
Algunos casos interesantes de bifurcaciones para C, se obtienen para valores no practicos en cir-cuitos reales, por ejemplo, estos suceden cuando se tiene un valor de Vlow negativo y se disminuye elvalor de R, en este caso la bifurcacion se obtiene a un mayor valor de C. Ahora si se deja un valor fijode R y se varia Vlow, se observa que la bifurcacion Hopf se presenta a un mayor valor de C cuando sehace mas negativo el Vlow. Para este analisis se hicieron pruebas de Vlow entre -3V y -8V y valores deresistencia entre 6Ω y 40Ω.
El anterior procedimiento se repitio para valores de Vlow positivos entre 5V y 20V y se obtuvieron
51

0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1−10
−8
−6
−4
−2
0
2
4
6
8
10
12
L
v
Vlow<0
Vlow>0
Figura 4.6: Diagrama de bifurcacion para L
los resultados presentados en la figura 4.5. Se observa que aumentando el valor de Vlow, el valor de Cal cual se presenta la bifurcacion tambien aumenta, y disminuye con el aumento del valor de R.
4.3 Diagramas de Bifurcacion para variaciones de L
Para variaciones de L en el diagrama de bifurcacion no se observo la presencia de bifurcaciones tipoHopf (Ver figura 4.6). Sin embargo, de los planos de fase, obtenidos en el capitulo anterior, se observaque cambios en este parametro provoca cambios en la dinamica cualitativa del sistema (Bifurcacion).En el diagrama de bifurcacion de L, no se observaron cambios ante variaciones del los otros parametrosexcepto para Vlow .
En la figura 4.7(a) se observan el caso nominal y los casos de analisis donde se obtuvieron bi-furcaciones. En la figura 4.7(b) se hace un acercamiento a los valores en los cuales se obtuvieronbifurcaciones, a mayor voltaje Vlow es mayor el valor de L al cual se obtiene la bifurcacion. Para0,1V < Vlow < 5 el algoritmo no converge.
Los diagramas mostrados en la figura 4.7, para otros parametros, se obtuvieron cambiando el valordel condensador a valores no utilizados en circuitos reales. La escala de L a la cual se observaron lasbifurcaciones esta entre 0 y maximo 2H.
Se detectaron bifurcaciones con respecto a L y cambios en R solo cuando se cambiaba el valor delcondensador (C = 1mF ) y para R en el intervalo entre 22Ω y 27Ω (Observese que limite superiordel intervalo es aproximadamente el valor donde se presentan la bifurcacion para R con los demasparametros en valores nominales), la bifurcacion sucede a mayor valor de L a medida que se aumenta R.Para variaciones de Z solo se observan bifurcaciones para valores de Z < −10Ω y con un C = 1000mF ,en este caso a medida que disminuye Z disminuye el valor de L al cual se presenta la bifurcacion. Porultimo, para Vin el algoritmo solo converge para Vin < 9V a menor valor de voltaje de entrada menorel valor de L al que se produce la bifurcacion Hopf (El valor de condensador utilizado es el mismo delcaso anterior).
52

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
9
L
v
H H H
Vlow=0.06V
Vlow=5V
Vlow=0.1VVlow=0.02V
(a) Diagrama de Bifurcaciones para L diferentes valoresde Vlow
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.22
0.24
0.26
0.28
0.3
0.32
0.34
0.36
L
v
H
H
H
Vlow=0.06V
Vlow=0.1V
Vlow=0.02V
(b) Diagrama de Bifurcaciones para L y diferentes val-ores de Vlow
0 0.05 0.1 0.15 0.2 0.25 0.37.8
7.82
7.84
7.86
7.88
7.9
7.92
7.94
7.96
7.98
8
L
v
H
H
R=24ohm
R=26ohm
C=1mF
(c) Diagrama de Bifurcaciones para L y diferentes val-ores de R
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
7.98
7.985
7.99
7.995
8
L
v
H
H
Z=−14ohm
Z=−20ohm
C=1000mF
(d) Diagrama de Bifurcaciones para L y diferentes val-ores de Z
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
0
1
2
3
4
5
6
7
8
9
L
v
H
H
H
H Vin=3V
Vin=9V
Vin=6V
Vin=5V
Vin=4V
Vin=2V
C=1000mF
(e) Diagrama de Bifurcaciones para L y diferentes val-ores de Vin
Figura 4.7: Diagramas de bifurcaciones para variaciones de L
53

−20 −15 −10 −5 0 5 10 15 202
3
4
5
6
7
8
9
H
H
v
(a) Diagrama de Bifurcaciones del Buck para varia-ciones de Z
−8 −6 −4 −2 0 2 4 6 8 10
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
Z
v
H
H
H
H
Vlow=5V
Vlow=6V
Vlow=9V
(b) Diagrama de Bifurcaciones para Z y diferentes val-ores de Vlow
−10 −8 −6 −4 −2 0 2 4 6 8 10
4
5
6
7
8
9
Z
v
H
H
H
H
R=6ohm
R=22ohm
(c) Diagrama de Bifurcaciones para Z y diferentes val-ores de R
−12 −10 −8 −6 −4 −2 0 2 4
2
3
4
5
6
7
8
9
10
Z
v
H H
H
H H
H
H
Vin=2V
Vin=5V
Vin=7V
Vin=8V
Vin=9V
(d) Diagrama de Bifurcaciones para Z y diferentes val-ores de Vin
Figura 4.8: Diagramas de bifurcaciones para variaciones de Z
4.4 Diagramas de Bifurcacion para variaciones de Z
En la figura 4.8(a) se observan el diagrama de bifurcacion obtenido para Z, con valores nominales. Eldiagrama muestra dos bifurcaciones Hopf una cercana a −9Ω y la otra aproximadamente en 0Ω, losvoltajes a los que se presenta la bifurcacion son 8V y 5V , respectivamente. En general, las bifurcacionesse presentan para valores de Z negativos.
En las figuras 4.8(b) - 4.8(d) se muestran diagramas obtenidos variando adicionalmente otro
54
parametro, se presentan los resultados para cambios en R, Vlow y Vin. Para cambios en los paramet-ros C y L no se observaron variaciones en la forma del diagrama, sin embargo, aunque la forma semantenıa para algunos valores no se detectaban las bifurcaciones Hopf observadas con los parametrosnominales.
Para valores de Vlow < 0, se observa una linea en v = 0V , para valores de 0 < Vlow < 5 el algoritmono converge, y para Vlow > 5 se observan cambios en el diagrama de bifurcacion como se presentaen la figura 4.8(b). Cuando se aumenta el valor de Vlow la primera bifurcacion Hopf se presenta a unmayor valor de Z pero la segunda Hopf se presenta un menor valor; esto mismo sucede cuando sedisminuye el valor de R (Ver figura 4.8(c))
Los cambios en el diagrama de bifurcacion de Z para variaciones de V in se suceden para valoresmayores de 0V y menores a 9V (Ver figura 4.8(d)); entre mayor sea Vin menor es el valor de Z al quese presenta la bifurcacion Hopf.
4.5 Diagramas de Bifurcacion para variaciones de Vlow
Para variaciones en Vlow, las bifurcaciones se detectan en puntos donde la dinamica cualitativa delsistema presenta cambios significativos, de acuerdo con los planos de fase, esto es alrededor de 0V yde 5V . Los diagramas de bifurcaciones obtenidos para este caso se presentan en la figura 4.9.
La figura 4.9(a) muestra los diagramas de bifurcacion para Vlow y R > 9Ω, en esta se observa comoel valor de Vlow al que se presenta la bifurcacion crece con R. los diagramas para Vlow y 4Ω < R < 9Ω,son los que tiene la forma mas interesante ya que presentan puntos limite (LP) y bifurcaciones Hopf(Ver figura 4.9(b)). Para R < 4Ω no se observan LP en los diagramas solamente bifurcaciones, comose muestra en la figura 4.9(c).
El diagrama de bifurcacion para Vlow y cambios en C y L conserva la forma, sin embargo, lasbifurcaciones se detectan en diferentes valores de Vlow de acuerdo con los valores de C y L, en lasfiguras 4.9(d) y 4.9(e) se detalla esa situacion.
Las figuras 4.9(f) y 4.9(g) presentan los resultados obtenidos para variaciones de Vlow y cambiosen Z y Vin, respectivamente. A mayor voltaje de entrada mayor el voltaje Vlow al que se detecta labifurcacion Hopf.
4.6 Diagramas de Bifurcacion para variaciones de Vin
El diagrama de bifurcacion para variaciones de Vin (Ver figura 4.10(a)) presenta variaciones al cambiode todos los parametros. Las figuras 4.10(b) - 4.10(d) muestran el diagrama modificado por cambiosadicionales en R, C y L, respectivamente.
En la figura 4.10(b) se observa como a medida que disminuye R se aumenta el valor de Vin al cualse presenta la bifurcacion Hopf. La figura 4.10(c) muestra los cambios en el valor al cual se presentala Hopf provocados por la variacion de L, a medida que el valor de L aumenta, aumenta el valor deVin al que se presenta la bifurcacion; en este caso el diagrama en general no sufre modificacion. Porultimo, para el aumento del valor de C, la bifurcacion Hopf se presenta a un menor valor de Vin (Verfigura 4.10(d)).
Tambien, se analizo el diagrama de bifurcacion variando Vlow y Z. La figura 4.11(a) presenta losdiagramas obtenidos para diferentes valores de Z < 0, a menor valor Z, mayor es el valor al que se
55

−2 0 2 4 6 8 10−2
0
2
4
6
8
10
Vlow
v
H
H
R=14ohm
R=22ohm
H H
R=40ohm
(a) Diagrama de Bifurcaciones paraVlow y diferentes valores de R
−6 −4 −2 0 2 4 6−1
0
1
2
3
4
5
6
7
8
9
10
Vlow
v
LP
H
H
LP
(b) Vlow y R = 6Ω
−15 −10 −5 0 5 10 15 20
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Vlow
v
H
(c) Vlow y R = 2Ω
−2 −1 0 1 2 3 4 5 6−2
−1
0
1
2
3
4
5
6
7
8
9
Vlow
v
H
H
H
H
H
H C=47uF
C=47uF
C=1uF
C=1uF
C=1mF
C=1mF
(d) Diagrama de Bifurcaciones para Vlow ydiferentes valores de C
−4 −2 0 2 4 6 8−1
0
1
2
3
4
5
6
7
8
9
Vlow
v
H
H
H
H H
H
L=1mH
L=1000mH
L=1000mH
L=1mH
L=20mH
L=20mH
(e) Diagrama de Bifurcaciones para Vlow ydiferentes valores de L
−2 0 2 4 6 8 10
0
1
2
3
4
5
6
7
8
Vlow
v
H
H
H
H
Z=−10ohm
Z=−1ohm
Z=5ohm
(f) Diagrama de Bifurcaciones para Vlow ydiferentes valores de Z
−2 0 2 4 6 8 100
2
4
6
8
10
12
14
Vlow
v
H H
H
Vin=14V
Vin=8V
Vin=1
H
(g) Diagrama de Bifurcaciones para Vlowydiferentes valores de Vin
Figura 4.9: Diagramas de bifurcaciones para variaciones de Vlow
56

Vlow<0
Vlow>0
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
Vin
v
H
(a) Diagrama de Bifurcaciones del Buck paravariaciones de Vin
0 5 10 15 20 25 30 350
2
4
6
8
10
12
14
Vin
v
H
H
H
H
R=19ohm
R=22ohm
R=40ohm
R=16ohm
(b) Diagrama de Bifurcaciones para Vin y dife-rentes valores de R
0 5 10 150
1
2
3
4
5
6
7
8
9
10
Vin
v
H H
H
L=20mH L=1000mH
L=100uH
L=1mH
H
(c) Diagrama de Bifurcaciones para Vin y dife-rentes valores de L
7.5 8 8.5 9 9.5 10 10.5 11 11.5 12
6.5
7
7.5
8
8.5
9
9.5
10
Vin
v
H
H
H
C=4.7uFC=1uF
C=1000uF
(d) Diagrama de Bifurcaciones para Vin y dife-rentes valores de C
Figura 4.10: Diagramas de bifurcaciones para variaciones de Vin
57

1 2 3 4 5 6 7 8 9 10 11
1
2
3
4
5
6
7
8
9
10
Vin
v H
H
H
Z=−10ohm
Z=−5ohm
Z=−1ohm
Z=1ohm
Z=5ohm
Z=10ohm
(a) Diagrama de Bifurcacion para Vin, antevariaciones de Z
5 10 15 20 25 30 35
5
10
15
20
25
Vin
v
H
H
H
Vlow=5V
Vlow=15V
Vlow=10V
(b) Diagrama de Bifurcacion para Vin, antevariaciones de Vlow
Figura 4.11: Diagrama de Bifurcacion del Buck para variaciones de Vin, ante Z y Vlow
presenta la bifurcacion Hopf. Para valores de Z positivos no se detectan bifurcaciones. Para cambiosen Vlow las bifurcaciones Hopf se presentan a un mayor valor de Vin cuando se aumenta Vlow; paravalores negativos de Vlow se observa una linea en v = 0 y por tanto, no se detectan bifurcaciones.
En todos los diagramas se observo como al cambiar el valor de un parametro adicional al que seestaba analizando se producıan bifurcaciones que no se habıan detectado con valores nominales, lo quese entiende como cambios en el punto de equilibrio ocasionados por la variacion de dos parametros.Lo ideal es representar estas variaciones en diagramas de bifurcacion 2-dimensionales, pero esto nofue posible debido a que no se logro convergencia en el algoritmo, y para el modelo en Simulink no secontaba con una base de tiempo unica como sucede con los circuitos que utilizan PWM.
58
Capıtulo 5
Conclusiones
Los circuitos electronicos conmutados contienen un conjunto interesante de comportamientos no lin-eales en su dinamica, que se evidencia a traves de las modificaciones que sufren los diagramas defase cuando se varıan sus parametros. Estos son muy atractivos para el analisis de bifurcaciones ensistemas no suaves. Para el caso de estudio de este trabajo se utiliza un circuito configuracion Buck yadicionalmente a los cambios en la dinamica cualitativa provocados por los parametros del circuito R,C, L y V in, se observan aquellos incorporados mediante la ley de control a traves de los parametrosZ y Vlow. De esta manera para el analisis se toma en cuenta el Buck controlado, mediante una ley decontrol por realimentacion de estados.
El analisis de bifurcaciones para este sistema se realiza a partir de un ley de control que no utilizamodulacion por ancho de pulso (PWM) para hacer la conmutacion, de esta manera la conmutacion serealiza unicamente por la comparacion directa de v(t) + Zi(t) > Vlow, donde el voltaje Vlow hace lasveces de voltaje de referencia. Para la simulacion del circuito la corriente se obtiene a traves de unaresistencia shunt en serie con la inductancia, y Z puede tomar valores positivos y negativos ya que esuna ganancia de senal implementada con amplificadores operacionales, para efectos del analisis a Zse le asociaron unidades de Ω.
Con el fin de obtener los planos de fase se implementaron modelos en Simulink de Matlab y enMATCONT. Los modelos en simulink son presentados en el capitulo 3, los resultados en las simulacio-nes con este modelo fueron similares a los obtenidos con MATCONT para caso nominal, sin embargo,los modelos con MATCONT fueron mas utilizados dada la facilidad que esta aplicacion tiene paravariar los parametros, y la rapidez con la que se obtenıan los planos de fase.
Los planos de fase encontrados para las variaciones de los parametros presentan cuatro compor-tamientos que se resumen en la tabla 3.2. El primero cuando en el plano de fase se observan dos regionesde atraccion delimitadas por un ciclo lımite inestable, para CI dentro del ciclo lımite inestable el vectorde campo busca el punto de equilibrio el cual se comporta como un foco estable, en caso contrariobusca el ciclo lımite estable. El segundo comportamiento es cuando existen ciclos estables pero no hayorbitas inestable y para t < 0 existe deslizamiento. El tercer caso cuando la variacion del parametrohace que el punto de equilibrio se comporte como foco estable y no se observa la aparicion de cicloslımites. Y finalmente, el cambio en el parametro ocasiona que el punto de equilibrio se comporte comonodo estable sin presencia de ciclos lımites.
En muchos casos los resultados obtenidos en la simulacion del circuito son similares a los obtenidoscon el modelo, sin embargo, cuando la corriente caıa a 0A y el circuito entraba en MCD, el plano defase en el circuito presentaba algunas ondulaciones no observadas en el modelo. Tambien en el caso
59

del deslizamiento en el modelo, para el circuito se observan “chattering” en la region de conmutacion.Notese que en el modelo se puede observar la tendencia de la orbita aunque el comportamiento fısicodel circuito no sea exactamente el mismo. Para el caso de Vin se encontraron casos que no coincidıancon el modelo, pero se debe tener en cuenta que el circuito real tiene elementos adicionales de nolinealidad, por ejemplo, la saturacion de los amplificadores operacionales; ademas, el elemento deconmutacion ya no es ideal presentando una caıda de tension la cual no fue contemplada en el modelo.
Para el caso de los diagramas de bifurcacion no solo se hallaron para los valores nominales y lavariacion de un parametro, adicionalmente, dada la dificultad de encontrar diagramas 2-dimensionales,se obtuvieron diagramas de bifurcacion cambiando el valor de otro parametro.
Para el diagrama obtenido ante variaciones de R se observa como la bifurcacion Hopf se registraaproximadamente en R = 26,21Ω, valor que delimita el comportamiento del punto de equilibrio comofoco estable R < 26,21Ω y la formacion de ciclos lımites. Sin embargo, desde R = 22Ω se presentanciclos lımites pero existen dos regiones de atraccion hacia el ciclo lımite y hacia el punto de equilibrioque se comporta como foco estable. De esta manera lo que la bifurcacion indica es el cambio de ladinamica del punto de equilibrio. Los ciclos lımite observados en la figura 4.3 corresponden a los cicloslımite inestables que delimitan las regiones de atraccion.
Otros casos para resaltar de los diagramas de bifurcaciones son el de Vin donde las bifurcacionesse detectan en el valor crıtico Vin = 9V , este valor crıtico cambia cuando se varıa otro parametro. Y elde Z donde las bifurcaciones se detectan en valores negativos cercanos a 0Ω (valor a partir del cual elpunto de equilibrio se comporta como nodo estable) y −10Ω (para valores menores que este el puntode equilibrio se comporta como foco estable) valores frontera del intervalo donde se presentan cicloslımites.
Para variaciones de L no se observo la deteccion de bifurcaciones, pero en los diagramas de fasese observan cambios en la dinamica del sistema cuando se realizan cambios en estos parametros, conel fin de observar los diagramas se modifico el valor de C.
Para cambios en C se detectan bifurcaciones a valores de C que generalmente no se utilizan en lavida real, sin embargo, teniendo en cuenta el interes por conocer a profundidad el modelo se obtuvieronlos diagramas para este caso variando adicionalmente otro parametro.
A futuro se puede continuar el desarrollo de la investigacion agregando al modelo las saturacionesdel opamp y la dinamica del elemento de conmutacion, esto con el fin de comparar los comportamientosy pensar en sistemas que emulen las bifurcaciones discontinuas. Cabe aclarar, que el analisis aquı pre-sentado busca un acercamiento entre los modelos y su montaje experimental como ejemplo de sistemasfısicos reales que presentan bifurcaciones discontinuas y tienen campos vectoriales discontinuos, perono pretende dar pautas para el diseno de convertidores Buck, aunque si permite conocer algunas desus dinamicas no lineales que pueden ser usadas para mejorar su diseno.
60

Bibliografıa
[1] S. BANERJEE y G. C. VERGHESE (Editores). Nonlinear Phenomena in Power Electron-ics.United States of America: IEEE PRESS, 2001.
[2] DAVID C. HAMILL. Power Electronics: A Field Rich in Nonlinear Dynamics. Department ofElectronic and Electrical Engineering University of Surrey, Guildford GU2 5XH, United Kingdom.
[3] ROBERT ERICKSON. Fundamentals of Power Electronics. International Thomson Publishing,Chapman & Hall, pag 146-151, 1999.
[4] A. TOVAR and H. DIAZ. Graphical Identification of Local Bifurcations. Universidad Nacional deColombia, Mechanical Engineering Ciudad Universitaria, Direccion Departamento de IngenierıaMecanica, Sede Bogota, Colombia [email protected]
[5] A. TOVAR and H. DIAZ. Herramienta Computacional para la Deteccion de Bifurcaciones Lo-cales en Sistemas Dinamicos. Universidad Nacional de Colombia, Mechanical Engineering Ciu-dad Universitaria, Direccion Departamento de Ingenierıa Mecanica, Sede Bogota, Colombia [email protected]
[6] P. KREIN, Elements of Power Electronics, OXFORD, 1998.
[7] N. MOHAN, T. UNDELAND y W. ROBBINS, Power Electronics, Wiley, 2003.
[8] F. ANGULO, M. DI BERNARDO and G. OLIVAR. On Some Nonsmooth Bifurcations Appearingin Variable. Vilanova ila Geltru, Espana, VSS 2004.
[9] G. OLIVAR, M. DI BERNARDO and F. ANGULO Discontinuous bifurcations in DC-DC con-verters. Industrial Technology, 2003 IEEE International Conference on Volume 2, Pages: 842 -845 Vol.2, Diciembre 2003.
[10] F. ANGULO, M. DI BERNARDO, G. OLIVAR and S. J. HOGAN. On two-parameter non-smoothbifurcations in power converters. Circuits and Systems, 2005. ISCAS 2005. IEEE InternationalSymposium, Pages: 1485 - 1488 Vol. 2, Mayo 2005.
[11] F. ANGULO, E. FOSSAS and G. OLIVAR, Tecnica ZAD aplicada a un convertidor Buck: anali-sis de estabilidad y de transicion al caos. Revista Iberoamericana de Automatica e InformaticaIndustrial Vol2, Num 4, pp 25-35, Octubre de 2005.
[12] F. ANGULO, M. DI BERNARDO, E. FOSSAS and G. OLIVAR. Feedback control of limit cy-cles: a switching control strategy based on nonsmooth bifurcation theory. Circuits and SystemsI: Regular Papers, IEEE Transactions on [see also Circuits and Systems I: Fundamental Theoryand Applications, IEEE Transactions on] Volume 52, Issue 2, Pages: 366 - 378, Febrero 2005.
61

[13] F. ANGULO, M. DI BERNARDO and G. OLIVAR. Control of Limit Cycle Amplitude ThroughNonsmooth Bifurcations. Decision and Control, 2005 and 2005 European Control Conference.CDC-ECC ’05. 44th IEEE Conference, Pages: 2604 - 2609, Diciembre 2005.
[14] G.OLIVAR, E. FOSSAS and C. BATLLE, Non-smooth continuation of periodic orbits in a chaoticbuck converter. Circuits and Systems, 1999. ISCAS ’99. Proceedings of the 1999 IEEE Interna-tional Symposium on Volume: 5 1999.
[15] G. OLIVAR, R. QUILES, A. MANUEL and J. DEL RIO. Two-dimensional bifurcation dia-grams with data acquisition. Instrumentation and Measurement Technology Conference, 2002.IMTC/2002. Proceedings of the 19th IEEE Volume 2, Pages: 1443 - 1447 vol.2, 2002.
[16] M. DI BERNARDO and P. KOWALCZYK. Sliding Bifurcations: A Novel Mechanism for theSudden Onset of Chaos in Dry Friction Oscillators. International Journal of Bifurcation andChaos, Vol. 13, No. 10 29352948 c© World Scientific Publishing Company, 2003.
[17] M. DI BERNARDO, M. I. FEIGIN, S. J. HOGAN and M.E.HOMER Local analysis of C-Bifurcatiosn in n-Dimensional Piecewise-Smooth Dynamical Systems. Chaos solitons anda Frac-tals, Vol 10, No 11, pag 1881-1908 elsevier Science, 1999.
[18] M. DI BERNARDO, E. FOSSAS, I. MASSANA and G. OLIVAR. Non-smooth phenomena inpower converters: Stick-slip oscillations and Grazing-sliding bifurcations.Febrero 10, 2005.
[19] M. DI BERNARDO. Controlling switching systems: a bifurcation approach. Circuits and Systems,2000. Proceedings. ISCAS 2000 Geneva. The 2000 IEEE International Symposium on Volume2, Pages: 377 - 380 vol.2, 2000.
[20] M. DI BERNARDO, A.R. CHAMPNEYS, C.J. BUDD, and F. VASCA. Sliding orbits and doublespiral bifurcation diagrams in power electronic DC/DC converters. Circuits and Systems, 1999.ISCAS ’99. Proceedings of the 1999 IEEE International Symposium on Volume 5, Pages: 262 -265 vol.5, 1999.
[21] M. DI BERNARDO, F. GAROFALO, L. GLIELMO and F. VASCA, Switchings, bifurcations,and chaos in DC/DC converters. Circuits and Systems I: Fundamental Theory and Applications,IEEE Transactions on [see also Circuits and Systems I: Regular Papers, IEEE Transactions on]Volume 45, Issue 2, Pages: 133 - 141, Febrero 1998.
[22] H. H. C. IU and C. K. TSE and O. DRANGA. Bifurcation in Parallel-Connected Buck Convertersunder Current-Mode Control. IEEE, 2005.
[23] H.H.C. IU and C.K. TSE. Bifurcation behavior in parallel-connected buck converters. Circuits andSystems I: Fundamental Theory and Applications, IEEE Transactions on [see also Circuits andSystems I: Regular Papers, IEEE Transactions on] Volume 48, Issue 2, Pages: 233 - 240, Febrero2001.
[24] H.H.C. IU and C.K. TSE. Bifurcation in parallel-connected buck converters under a democraticcurrent sharing scheme. Industrial Electronics, 2001. Proceedings. ISIE 2001. IEEE InternationalSymposium on Volume 3, Pages: 2118 - 2123 vol.3, 2001.
[25] H.H.C. IU, C.K. TSE and Y.M. LAI. Effects of interleaving on the bifurcation behaviour ofparallel-connected buck converters. Industrial Industrial Technology, 2002. IEEE ICIT ’02. 2002IEEE International Conference on Volume 2, Pages: 1072 - 1077 vol.2, Diciembre 2002.
62

[26] S. BANERJEE, P. RANJAN, and C. GREBOGI. Bifurcations in Two-Dimensional PiecewiseSmooth Maps-Theory and Applications in Switching Circuits. IEEE Transactions on Circuits andSystems-I: Fundamental Theory and Applications, Vol. 47, No. 5, Mayo 2000.
[27] S.PARUI and S. BANERJEE. Bifurcations Due to Transition From Continuous Conduction Modeto Discontinuous Conduction Mode in the Boost Converter. IEEE Transactions on Circuits andSystems-I: Fundamental Theory and Applications, Vol. 50, No. 11, Noviembre 2003.
[28] G. YUAN, S. BANERJEE, E. OTT and JAMES A. YORKE. BorderCollision Bifurcations inthe Buck Converter. IEEE Transactions on Circuits And Systems-I: Fundamental Theory andApplications, Vol. 45, No. 7, Julio 1998.
[29] S. BANERJEE, E. OTT, J.A. YORKE and G.H. YUAN. Anomalous bifurcations in DC-DC con-verters: borderline collisions in piecewise smooth maps. Power Electronics Specialists Conference,1997. PESC ’97 Record., 28th Annual IEEE Volume 2, Pages: 1337 - 1344 vol.2, Junio 1997.
[30] T. SAITO, H. TORIKAI and W. SCHWARZ. Switched dynamical systems with double periodicinputs: an analysis tool and its application to the buck-boost converter. Circuits and Systems I:Fundamental Theory and Applications, IEEE Transactions on [see also Circuits and Systems I:Regular Papers, IEEE Transactions on] Volume 47, Issue 7, Pages: 1038 - 1046, Julio 2000.
[31] T. SAITO, M. YOSHIZAWA, H. TORIKAI and S. TAZAKI. Analysis of interleaved convert-ers with WTA-based switching. Circuits and Systems, 2002. ISCAS 2002. IEEE InternationalSymposium on Volume 3, Pages: III-405 - III-408 vol.3, 2002.
[32] T. SAITO, S. TASAKI and H. TORIKAI. Interleaved Buck Converters Based on Winner-Take-All Switching. Circuits and Systems I: Regular Papers, IEEE Transactions on [see also Circuitsand Systems I: Fundamental Theory and Applications, IEEE Transactions on] Volume 52, Issue8, Pages: 1666 - 1672, Agosto 2005.
[33] YUE MA , H. KAWAKAMI and CHI K. TSE. Bifurcation Analysis of Switched Dynamical Sys-tems with Periodically Moving Borders. Manuscript submitted March 19, 2003. Circuits andSystems I: Regular Papers, IEEE Transactions on [see also Circuits and Systems I: FundamentalTheory and Applications, IEEE Transactions on Volume 51, Issue 6, Page(s):1184 - 1193, Junio2004.
[34] YUE MA and H. KAWAKAMI. Control of Bifurcations in DC/DC PWM Switching Converters.International 8th Conference on control, automation and Robotics and Vision Kunming, China6-9th, Diciembre 2004.
[35] YUE MA, CHI K. TSE, TAKUJI KOUSAKA and HIROSHI KAWAKAMI. Connecting BorderCollision With Saddle-Node Bifurcation in Switched Dynamical Systems. IEEE Transactions onCircuits and Systems Vol XX, NO. Y. 2004.
[36] YUE MA, H. KAWAKAMI and C.K. TSE, Analysis of bifurcation in switched dynamical systemswith periodically moving borders: application to power converters. Circuits and Systems, 2004.ISCAS ’04. Proceedings of the 2004 International Symposium on Volume 4, Pages: IV - 701-4,Mayo 2004.
[37] R. I. LEINE, D. H. VAN CAMPEN, and B. L. VAN DE VRANDE. Bifurcations in Nonlinear Dis-continuous Systems. Nonlinear Dynamics 23: 105164, 2000. c© 2000 Kluwer Academic Publishers.Printed in the Netherlands, 2000.
63
[38] K.W.E. CHENG, LIU MINJIAN, WU JIE and N.C. CHEUNG. Study of bifurcation and chaosin the current-mode controlled buck-boost DC-DC converter. Industrial Electronics Society, 2001.IECON ’01. The 27th Annual Conference of the IEEE Volume 2, Pages: 838 - 843 vol.2, 2001.
[39] M.B. DEBBAT, A. EL AROUDI, R. GIRAL and L. MARTINEZ-SALAMERO. Stability analysisand bifurcations of SEPIC DC-DC converter using a discrete-time model. Industrial Technology,2002. IEEE ICIT ’02. 2002 IEEE International Conference on Volume 2, Pages: 1055 - 1060vol.2, Diciembre 2002.
[40] L. BENADERO, A. EL AROUDI, G. OLIVAR, E. TORIBIO and E. GOMEZ. Two-DimensionalBifurcation Diagrams. Background Pattern of Fundamental DC DC Converters with PWM Con-trol. International Journal of Bifurcation and Chaos, Vol. 13, No. 2 427-451 c© World ScientificPublishing Company, 2003.
[41] O. DRANGA, B. BUTI, and I. N. FELLOW. Stability Analysis of a Feedback-Controlled ResonantDCDC Converter. IEEE Transactions on Industrial Electronics, Vol. 50, No. 1, Febrero 2003.
[42] YAN HONG LIM and DAVID C. HAMILL Bifurcations and Chaos in Models Of SpacecraftPower Systems. Email: [email protected], [email protected].
[43] SANDEEP BALA. AE454 Dynamics and Bifurcations Term Paper Chaos in DC-DC convert-ers. The entire work done for this term paper (simulation files, results, reports) is available athttp://www.ee.iitb.ac.in/uma/ sbala/AE454/, Abril 2003.
[44] F. B. CUNHA, D. J. PAGANO, and U. F. MORENO. Sliding Bifurcations of Equilibria in PlanarVariable Structure Systems. IEEE Transactions on Circuits and Systems-I: Fundamental Theoryand Applications, Vol. 50, No. 8, Agosto 2003.
[45] JOHNATAN H.B. DEANE and DAVID C. HAMILL. Analysis, Simulation and ExperimentalStudyof Chaos in the Buck Converter. IEEE,1990.
[46] WILLIAM C. Y. CHAN and C. K. TSE. Bifurcations in Current-Programmed DC/DC BuckSwitching Regulators Conjecturing a Universal Bifurcation Path. International Journal of CircuitTheory and Applications Int. J. Circ. Theor. Appl., 26, 127-145, 1998.
[47] S.K. MAZUMDER, A.H. NAYFEH and D. BOROYEVICH. Theoretical and experimental inves-tigation of the fast- and slow-scale instabilities of a DC-DC converter. Power Electronics, IEEETransactions on Volume 16, Issue 2, Pages: 201 - 216, Marzo 2001.
[48] KAHOU WONG. Stability study of a voltage-mode buck regulator using system poles approach.Circuits and Systems, 2002. ISCAS 2002. IEEE International Symposium on Volume 5, Pages: V-817 - V-820 vol.5, 2002.
[49] CHUNG-CHIEH FANG and EYAD H. ABED. Harmonic Balance Analysis and Control of PeriodDoubling Bifurcation in Buck Converters. Circuits and Systems, 2001. ISCAS 2001. The 2001IEEE International Symposium on Volume 3, Pages: 209 - 212 vol. 2, Mayo 2001.
[50] Z. NING and W. WEILIN. Two-parameter chaotic control in the voltage controlled buck converter.Power Electronics and Drive Systems, 2003. PEDS 2003. The Fifth International Conference onVolume 2, Pages: 1329 - 1333 Vol.2, Noviembre 2003.
[51] L. PREMALATHA and P. VANAJARANJAN Spectral Analysis of DC-DC Buck Converter withChaotic Dynamics. INDICON, 2005 Annual IEEE Pages: 605 - 608, Diciembre 2005.
64
[52] I. FLEGAR, D. PELIN, and D.ZAZECK. Bifurcation diagrams of the buck converter. Electronics,Circuits and Systems, 2002. 9th International Conference on Volume 3, Pages: 975 - 978 vol.3,2002.
[53] W. GOVAERTS, YURI A. KUZNETSOV and A. DHOOGE. Numerical Continuation of Bifurca-tions of Limit Cycles in Matlab. Universiteit Gent, Belgium, Utrecht University The Netherlands.
[54] A. DHOOGE, W. GOVAERTS, YURI A. KUZNETSOV, W. MESTROM and A.M. RIET.CL MATCONT: A continuation toolbox in Matlab. Universiteit Gent, Belgium, Utrecht Uni-versity The Netherlands, Julio 2004.
[55] JUING-HUEI SU, JIANN-JONG CHEN, and DONG-SHIUH WU. Learning Feedback ControllerDesign of Switching Converters Via MATLAB/SIMULINK. IEEE Transactions on Education,Vol. 45, No. 4, November 2002.
[56] I. MERILLAS S. LIBRO DE RESUMENES: Bifurcaciones no suaves en sistemas stick-slip,Universidad Politecnica de Cataluna Departamento de Matematica Aplicada IV. Nolineal2004, Toledo, Universidad de Castilla-La Mancha, Junio de 2004.
65