Capítulo 7: Sistemas de orden superior...recepción de un pulso eléctrico se produce una fuerza...
22
Transcript of Capítulo 7: Sistemas de orden superior...recepción de un pulso eléctrico se produce una fuerza...
-
Capítulo 7: Sistemas de orden
superior
[email protected] (C-305)
-
Capítulo 7: Sistemas de orden superior
� Objetivos de la lección
� Influencia en la adición de polos y ceros
� En la cadena abierta
� En serie
� Sistemas equivalente reducido
+-
)( sGpsT+1
1)(sG ( )zsT+1+
-)( sG
psT+1
1+-
)( sGpsT+1
1)(sG ( )zsT+1)(sG ( )zsT+1
-
Adición de un polo en la cadena abierta
� Los polos de la C.A. hacen alejar las ramas del LDR
+
- 12
2
+
+
nn
ss
k
ωξ
ω psT+1
1+
- 12
2
+
+
nn
ss
k
ωξ
ω psT+1
1
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Adición de un polo en la cadena abierta con Tp 0, 0.5, 1, y 5 s
Tiempo (s)
Am
plit
ud
0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
TP=5s
TP=0s TP=0.5s TP=1s
(ωn= 1,ξ=0.5 y k=1)
%Herramienta de Matlab
rltool(tf(1,[1 1 1]))
-
Adición de un polo en serie
� Los polos en serie son filtros paso-bajo
(ωn= 1,ξ=0.5 y k=1)
12
2
+
+
nn
ss
k
ωξ
ω ( )PsT+11
12
2
+
+
nn
ss
k
ωξ
ω ( )PsT+11
×
×
×pT
s1−
=
djω
σ
( )ξθ arccos= nω
θ×
×
×pT
s1−
=
djω
σ
( )ξθ arccos= nω
θ
Adición de un polo en la cadena cerrada con Tp 0, 0.5, 1, 2 y 4 s
Tiempo (s)
Am
plit
ud
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
TP=0
TP=4s
TP=2s
TP=0.5
TP=1s
Adición de un polo en la cadena cerrada con Tp 0, 0.5, 1, 2 y 4 s
Tiempo (s)
Am
plit
ud
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
TP=0
TP=4s
TP=2s
TP=0.5
TP=1s
-
Adición de un cero en cadena abierta
� Los ceros de la C.A. hacen atraer las ramas del LDR
(ωn= 1,ξ=0.5 y k=1)
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Adición de un cero en la cadena abierta con Tz 0, 0.5, 1, y 5 s
Tiempo (sec)
Am
plit
ud
0 5 10 150
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Tz=5s
Tz=1s
Tz=0.5s
Tz=0s
Adición de un cero en la cadena abierta con Tz 0, 0.5, 1, y 5 s
Tiempo (sec)
Am
plit
ud
0 5 10 150
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Tz=5s
Tz=1s
Tz=0.5s
Tz=0s
+-
•12
2
+
+
nn
ss
k
ωξ
ω( )zsT+1
%Herramienta de Matlab
rltool(tf(1,[1 1 1]))
-
Adición de un cero en serie
� Los ceros en serie tienen carácter predictivo
(ωn= 1,ξ=0.5 y k=1)
12
2
+
+
nn
ss
k
ωξ
ω
( )zsT+1y(t)
( )ty*
12
2
+
+
nn
ss
k
ωξ
ω
( )zsT+1y(t)
( )ty*
( )
+
+
⋅+
+
+
=
1212
.1
22
nn
z
nn
ss
ksT
ss
k
ssY
ωξ
ωωξ
ω
( ) ( ) ( )tyTtyty z**�+=
0 2 4 6 8 10 12-0.2
0
0.2
0.4
0.6
0.8
1
1.2Respuesta ante una entrada en escalon unitario con cero añadido en la cadena cerrada
tiempo (sec)A
mp
litud
Tz y*(t)
y*(t)
y(t)
-
Adición de un cero en serie
� Los ceros en serie tienen carácter predictivo
(ωn= 1,ξ=0.5 y k=1)12
2
+
+
nn
ss
k
ωξ
ω
( )zsT+1y(t)
( )ty*
12
2
+
+
nn
ss
k
ωξ
ω
( )zsT+1y(t)
( )ty*
Adición de un cero en la cadena cerrada con Tz 0, 0.5, 1, 2 y 4 s
Tiempo (sec)
Am
plit
ud
0 2 4 6 8 10 120
0.5
1
1.5
2
2.5
3
Tz=0s
Tz=4s
Tz=2s
Tz=1s
Tz=0.5s
Adición de un cero en la cadena cerrada con Tz 0, 0.5, 1, 2 y 4 s
Tiempo (sec)
Am
plit
ud
0 2 4 6 8 10 120
0.5
1
1.5
2
2.5
3
Tz=0s
Tz=4s
Tz=2s
Tz=1s
Tz=0.5s
-
Sistema equivalente reducido
� Formas de reducir el modelo
� Polos dominantes
� Cancelación de polos y ceros próximos entre sí.
� Igualdad de las respuestas del sistema y su equivalente reducido
×
×
×
Región de
polos
insignificantes
Región de
polos
dominantes
-1/Td
d = 5 a 10σdo
Td> 5 a 10 T
-σd×-1/T ×
×
×
Región de
polos
insignificantes
Región de
polos
dominantes
-1/Td
d = 5 a 10σdo
Td> 5 a 10 T
-σd×-1/T
( ) ( )ssYssY eqss 00limlim
→→=
-
Ejemplo
� Dibujar la respuesta aproximada al escalón unitario de estos dos sistemas
� 1)
( ) ( )( )( )352
5321 +++
+=
sss
ssG ( )
( )( )( )15201.0
13022 +++
+=
sss
ssG
212,1 js ±−= ( ) ( ) ( ) ( ) 525
135
530
5
30
52
321
*
2
*
++≈⇒=
⋅
⋅==
⋅=⇒
++≈
sssGY
kY
ss
ksG eqeqeq
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escalón
Tiempo (s)
Am
plit
ud
Geq(s)G1(s)
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escalón
Tiempo (s)
Am
plit
ud
Geq(s)G1(s)
st r 12
=−
=ϑπ
πσ
π==st
st p 57.12
==π
radarctg 1.12 ==ϑ
%79.202079.02/ == −πeM p
-
Ejemplo
� Dibujar la respuesta aproximada al escalón unitario de estos dos sistemas
� 2)
( ) ( )( )( )352
5321 +++
+=
sss
ssG ( )
( )( )( )15201.0
13022 +++
+=
sss
ssG
sts 30103 =⋅=
( ) ( )( )( )
( )( )( )( )78.022.191.0
130
15201.0
13022 +++
+=
+++
+=
sss
s
sss
ssG
( ) ( )1.0
220
78.022.191.0
30
1.00
1.0 +=⇒=
⋅⋅==⇒
+=
sG
kY
s
ksG eqeqeq
0 10 20 30 40 50 600
2
4
6
8
10
12
14
16
18
20Respuesta al escalón
Tiempo (s)
Am
plit
ud
Geq(s)
G2(s)
0 10 20 30 40 50 600
2
4
6
8
10
12
14
16
18
20Respuesta al escalón
Tiempo (s)
Am
plit
ud
Geq(s)
G2(s)
-
Examen de primer parcial
El control de temperatura de una célula Peltier es realizado mediante un sistema de realimentación unitaria. La planta Peltier es modelada mediante la siguiente función de transferencia:
Se pide:
1. Dada el siguiente esquema electrónico, calcular en función de los nombres de las resistencias y condensadores y demostrar que vale para los valores dados. (4 puntos)
( )( ) ( )( )07.0525.0
045.0
++=
sssv
sv
r
s
( )( ) ( ) s
s
susu
sv
se
r
11
2115
+
+=
−
-
Examen de primer parcial2. Diagrama de bloques del sistema de control y función de transferencia de la cadena cerrada. (3 puntos)
( )( )
( )( )
( )( )
( )712.098.1595.1
5.035.1
525.007.0
045.0
1
21151
525.007.0
045.0
1
2115
23 +++
+=
+++
++
+++
+
=sss
s
sss
s
sss
s
su
su
e
s
-
Examen de primer parcial
3. Respuesta temporal ante una entrada en escalón unitario. Utilice el equivalente reducido, sabiendo que el sistema tiene un polo en cadena cerrada en -0.495. Indicar sobre la gráfica el tiempo de establecimiento, el tiempo de subida, el tiempo de pico y la sobreoscilación. (3 puntos)
( )( )
( ) ( )( )( ) 437.11.1
36.1
437.11.1496.0
5.035.1
712.098.1595.1
5.035.12223 ++
≅+++
+=
+++
+=
sssss
s
sss
s
su
su
e
s
Los polos son -0.55±j1.065. El sistema es sub-amortiguado, luego los valores
de los puntos característicos son:
%6.199.19.27.5 ==== prps Mststst
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ude
-
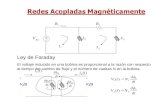
Problema 2: Dinámica de un telégrafo
� La figura muestra el modelo simplificado de un telégrafo. Ante la recepción de un pulso eléctrico se produce una fuerza magnética proporcional a la corriente de su bobina, originando un desplazamiento en la palanca que provoca el movimiento de la masa del martillo, el cual choca contra una campana, produciendo una onda sonora. Se pide:
1. Conjunto de ecuaciones algebro-diferenciales que modele la dinámica del telégrafo.
2. Diagrama a bloques y función de transferencia entre el efecto, x2(s), y la causa, e(s).
l1 l2
M1
B1
R, L
M2
K2 B2
x1 x2
e(t)
l1 l2
M1
B1
R, L
M2
K2 B2
x1 x2
e(t)
-
Problema 2: Dinámica de un telégrafo
1. Conjunto de ecuaciones algebro-diferenciales que modele la dinámica del telégrafo.
2. Diagrama a bloques y función de transferencia entre el efecto, x2(s), y la causa, e(s).
l1 l2
M1
B1
R, L
M2
K2 B2
x1 x2
e(t)
l1 l2
M1
B1
R, L
M2
K2 B2
x1 x2
e(t)
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )( ) ( )
1 1 1 1 1 1
2 2 2 2 2 2 2 2
1 2
1 1 2 2
1 2
;
;
;
p
r
r
r r
e t Ri t Li t f t k i t
f t M g M x t B x t f t
f t M g M x t B x t k x t
x t x tf t l f t l
l l
= + =
+ = + +
= + + +
= ≅
�
�� �
�� �
( )( )
( )
2
21 2 1 2 21 2 1 2 2
2 1 2 1 1
pkx s
e s l l l l lR sL M M s B B s k
l l l l l
∆=
∆ + + + + +
-
Problema 2: Dinámica de un telégrafo
Modelo equivalente reducido
( )( )
( )( ) ( )
2
3 3 2
21 2 1 2 21 2 1 2 2
2 1 2 1 1
0.4
10 10 6.4 10 0.24 4
pkx s
e s s s sl l l l lR sL M M s B B s k
l l l l l
− −
∆= =
∆ + ⋅ + + + + + + +
( )( ) 106.0106.1
01.023
2
++⋅≅
− ssse
sx
0 0.05 0.1 0.15 0.2 0.25 0.30
0.002
0.004
0.006
0.008
0.01
0.012Respuesta a 1V de escalon
Tiempo (sec)
Despla
zam
iento
del t
ele
gra
fo
1,2 18.7 16.53s j= − ±
0.167 0.19 0.146 6%s p r pt s t s t s M= = = =
-
Problema 3
� Para la traslación horizontal de una cámara de vídeo pan-tilt se ha utilizado una cinta transportadora. En el control se ha utilizado un motor de continua y una reductora. Se pide:
1. Diagrama de bloques del sistema
2. FDT entre la velocidad de desplazamiento del carro y la tensión en el motor.
3. Si se le aplica una tensión de 10V al motor, determinar la evolución de la velocidad del carro, tanto gráficamente como analíticamente (aplíquese equivalente reducido).
4. Con la señal recibida del anterior apartado, ¿Cuánto se habrá desplazado, aproximadamente, la cámara después de cinco segundos?
Datos:
Motor: Resistencia de armadura = 7.94 Ω, Inductancia equivalente del flujo disperso = 1.54 mH, Constante del par motor = 39.3 mNm/A., Constante de la fuerza contralectromotriz => 243 rpm/V, Momento de inercia del rotor= 26.6 gr cm2Tren de engranajes: relación de transmisión = 1:198Cinta transportadora: Radio de las poleas = 25 mm, Peso de la cámara= 1200 gr. Rozamiento viscoso equivalente de las poleas = 10-1 N.m.s/rad
-
Problema 3
� Diagrama a bloques M1:197
cJJM
1ϑ
2ϑBC
ia LaRa
( )( ) ( )( )17.755082
33.1211
1056.11011.21096.4
1096.43529
6
++=
⋅+⋅⋅+⋅⋅
⋅=
−−−
−
sssssu
sx
m
�
( )( ) ( ) ( )
30.238 3.2 10
75.17 0.013 1m
x s
u s s s
−⋅≈ =
+ +
�
-
Problema 3
3. El equivalente reducido queda:Ante una entrada de 10V, la velocidad de desplazamiento de
carro sigue la expresión analítica de:
Y la evolución de la velocidad del carro con el tiempo será:
4. Como se ve en la gráfica, la velocidad del carro alcanza el régimen permanente en 40 ms, por tanto, la velocidad es prácticamente constante y el espacio recorrido en 5 segundo será 0.0317[m/s] x 5 [s] = 0.1585 [m].
( )( ) ( )17.75
238.0
+≈
ssu
sx
m
�
( ) ( )tetx 17.7510317.0 −−=�
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
0.005
0.01
0.015
0.02
0.025
0.03
0.035
System: untitled1
Final Value: 0.0317
Evolucion de la velocidad del carro
tiempo (sec)
[m/s
]
-
Problema 5En la figura se muestra un sistema de suspensiones activas para un vehículo. En paralelo con el clásico amortiguador pasivo (con constante equivalente K, B), el sistema activo utiliza un actuador hidroneumático, controlado a partir de la medida captada por la posición de la cabina. La fuerza del actuador es proporcional, ka, a la tensión recibida en la electrovalvula, u(t). La señal muestrada de posición, ym, sigue con ganancia km al movimiento vertical de vehículo. El compensador es de tipo proporcional. kc. Se pide:
K B
M
ym (t)
posición
Gc (s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
yref(t)
-
u(t)K B
M
ym (t)
posición
Gc (s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
yref(t)
-
u(t)
1. Conjunto de ecuaciones algebro-diferenciales que describe la
dinámica del sistema de control.
2. Diagrama a bloques del sistema linealizado alrededor del punto de reposo.
3. Calcular la FDT , cuando la señal de mando es nula y el
compensador es unitario.
4. Evolución temporal aproximada de la salida del apartado anterior ante un escalón unitario como excitación.
5. Evaluar las mejoras de la suspensión activa respecto al sistema
clásico: excitar la entrada con un escalón unitario y ver la evolución
temporal con la suspensión clásica y comparar los resultados con
el apartado anterior.Datos
M = 250 kg, B = 500 Ns/m, K=1000N/m, ka= 100 N/V, km= 10V/m, kc=1
-
Problema 5
K B
M
ym (t)
posición
Gc (s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
yref(t)
-
u(t)K B
M
ym (t)
posición
Gc (s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
yref(t)
-
u(t)
1. Conjunto de ecuaciones algebro-diferenciales que describe la dinámica del sistema de control.
2. Diagrama a bloques del sistema linealizado alrededor del punto de reposo.
3. Calcular la FDT , cuando la señal de mando es nula y el compensador es unitario.
( )( ) 1000500250
50010002 +⋅+⋅
⋅+=
∆
∆
ss
s
sx
sy
( )( ) 2000500250
50010002 +⋅+⋅
⋅+=
∆
∆
ss
s
sx
sy
Sin actuador
Con actuador
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )( )( ) ( )
( )
ref m c a
m m
e t y t y t u t k e t f t k u t
Mg f t My t K y t x t B y t x t
y t k y t
= − = ⋅ = ⋅
+ = + − + −
=
�� � �
-
Problema 5
K B
M
ym (t)
posición
Gc (s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
yref(t)
-
u(t)K B
M
ym (t)
posición
Gc (s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
yref(t)
-
u(t)
( )( ) 1000500250
50010002 +⋅+⋅
⋅+=
∆
∆
ss
s
sx
sy ( )( ) 2000500250
50010002 +⋅+⋅
⋅+=
∆
∆
ss
s
sx
sySin actuador Con actuador
4. Evolución temporal aproximada de la salida del apartado anterior ante un escalón unitario como excitación.
5. Evaluar las mejoras de la suspensión activa respecto al sistema clásico: excitar la entrada con un escalón unitario y ver
la evolución temporal con la suspensión clásica y comparar los resultados con el apartado anterior.
1 1 1.73ds j= − ± 1 1 2.65ds j= − ±