Capítulo 6: Análisis en el dominio del tiempo de sistemas ...Análisis en el dominio del tiempo de...
40
Capítulo 6: Análisis en el dominio del tiempo de sistemas de primer y segundo orden [email protected] (C-305)
Transcript of Capítulo 6: Análisis en el dominio del tiempo de sistemas ...Análisis en el dominio del tiempo de...
Capiacutetulo 6 Anaacutelisis en el dominio del tiempo de
sistemas de primer y segundo orden
carlosplateroupmes (C-305)
Anaacutelisis en el dominio del tiempo de sistemas de primer y segundo
orden
Las propiedades dinaacutemicas de las plantas pueden ser aproximadaspor las caracteriacutesticas temporales de sistemas maacutes simples
Se entiende por modelos simples aquellos que definen su dinaacutemicapor ecuaciones diferenciales lineales de primer o de segundo orden
Desde el punto de vista del anaacutelisis al reducir el modelo se podraacutepredecir sus caracteriacutesticas temporales empleando expresionesmatemaacuteticas de los modelos sencillos
Desde el disentildeo se suele emplear las medidas de lascaracteriacutesticas temporales de los modelos simples para fijar losrequisitos del comportamiento dinaacutemico de los sistemas acompensar
Sistemas de primer orden
La funcioacuten de transferencia de un sistema de primer
orden es
En el caso maacutes simple el numerador corresponde a una
ganancia
( )( )
( )as
sNsG
+=
( )( )( )
Ts
Tk
Ts
k
sX
sYsG
1
1+
=+
==
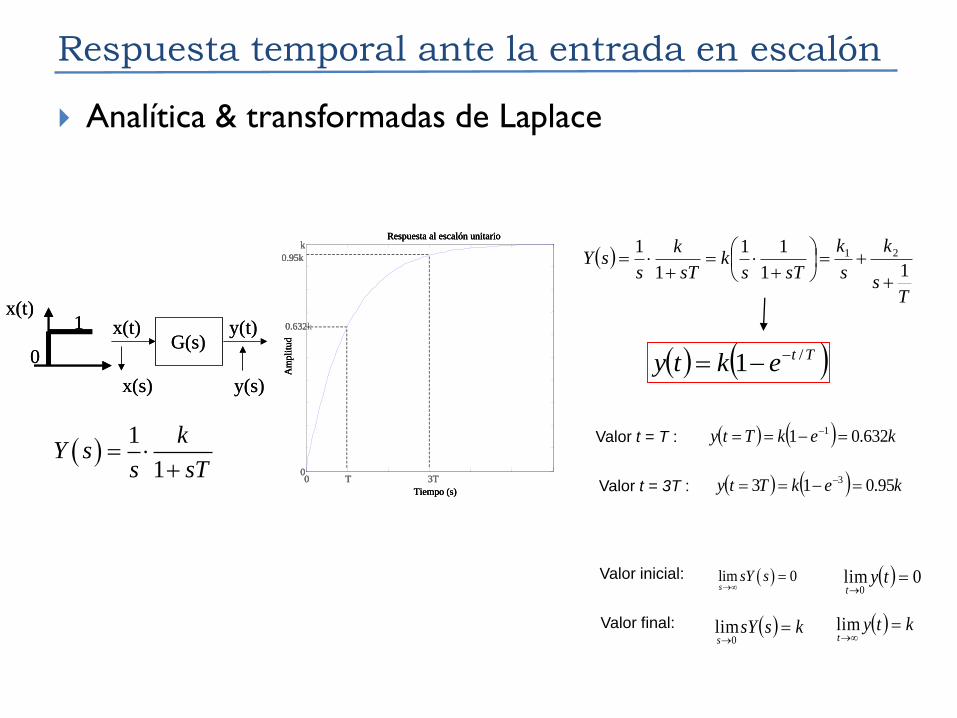
Respuesta temporal ante la entrada en escaloacuten
Analiacutetica amp transformadas de Laplace
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
( )
Ts
k
s
k
sTsk
sT
k
ssY
11
11
1
1 21
+
+=
+=
+=
( ) ( )Ttekty 1 minusminus=
( )1
1
kY s
s sT=
+
Valor final ( ) kssYs
=rarr0
lim ( ) ktyt
=rarr
lim
( )lim 0s
sY srarr
= ( ) 0lim0
=rarr
tyt
Valor inicial
Valor t = 3T ( ) ( ) kekTty 95013 3 =minus== minus
Valor t = T ( ) ( ) kekTty 63201 1 =minus== minus
Step Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
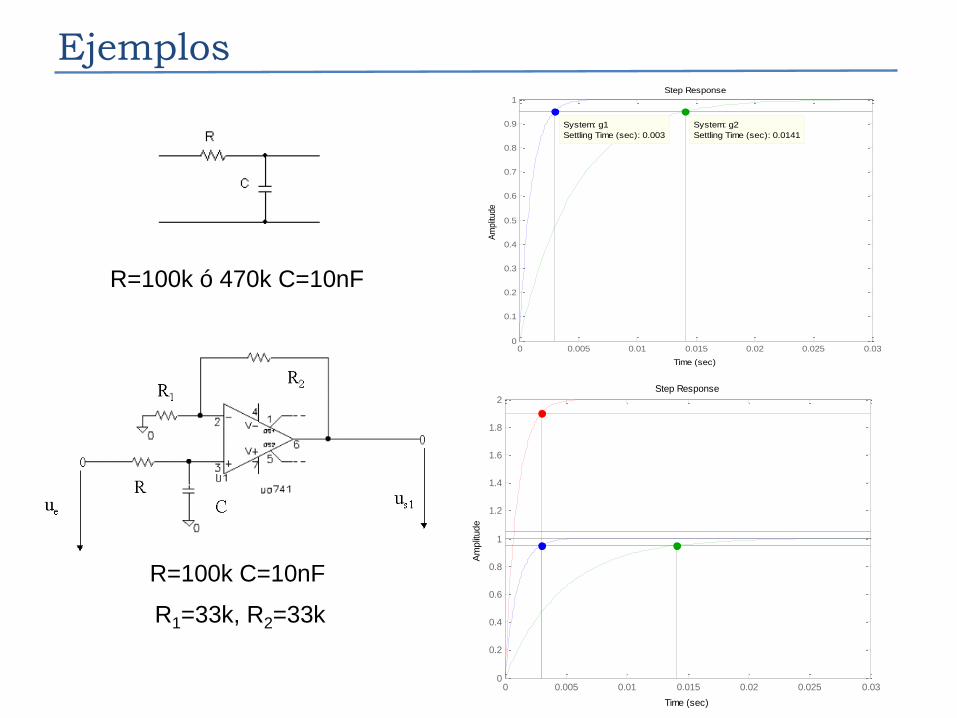
EjemplosStep Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
01
02
03
04
05
06
07
08
09
1
System g2
Settling Time (sec) 00141
System g1
Settling Time (sec) 0003
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
Ejemplos
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
R3=33k R4=68k0 0005 001 0015 002 0025 003
0
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
Anaacutelisis en el dominio del tiempo de sistemas de primer y segundo
orden
Las propiedades dinaacutemicas de las plantas pueden ser aproximadaspor las caracteriacutesticas temporales de sistemas maacutes simples
Se entiende por modelos simples aquellos que definen su dinaacutemicapor ecuaciones diferenciales lineales de primer o de segundo orden
Desde el punto de vista del anaacutelisis al reducir el modelo se podraacutepredecir sus caracteriacutesticas temporales empleando expresionesmatemaacuteticas de los modelos sencillos
Desde el disentildeo se suele emplear las medidas de lascaracteriacutesticas temporales de los modelos simples para fijar losrequisitos del comportamiento dinaacutemico de los sistemas acompensar
Sistemas de primer orden
La funcioacuten de transferencia de un sistema de primer
orden es
En el caso maacutes simple el numerador corresponde a una
ganancia
( )( )
( )as
sNsG
+=
( )( )( )
Ts
Tk
Ts
k
sX
sYsG
1
1+
=+
==
Respuesta temporal ante la entrada en escaloacuten
Analiacutetica amp transformadas de Laplace
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
( )
Ts
k
s
k
sTsk
sT
k
ssY
11
11
1
1 21
+
+=
+=
+=
( ) ( )Ttekty 1 minusminus=
( )1
1
kY s
s sT=
+
Valor final ( ) kssYs
=rarr0
lim ( ) ktyt
=rarr
lim
( )lim 0s
sY srarr
= ( ) 0lim0
=rarr
tyt
Valor inicial
Valor t = 3T ( ) ( ) kekTty 95013 3 =minus== minus
Valor t = T ( ) ( ) kekTty 63201 1 =minus== minus
Step Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
EjemplosStep Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
01
02
03
04
05
06
07
08
09
1
System g2
Settling Time (sec) 00141
System g1
Settling Time (sec) 0003
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
Ejemplos
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
R3=33k R4=68k0 0005 001 0015 002 0025 003
0
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
Sistemas de primer orden
La funcioacuten de transferencia de un sistema de primer
orden es
En el caso maacutes simple el numerador corresponde a una
ganancia
( )( )
( )as
sNsG
+=
( )( )( )
Ts
Tk
Ts
k
sX
sYsG
1
1+
=+
==
Respuesta temporal ante la entrada en escaloacuten
Analiacutetica amp transformadas de Laplace
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
( )
Ts
k
s
k
sTsk
sT
k
ssY
11
11
1
1 21
+
+=
+=
+=
( ) ( )Ttekty 1 minusminus=
( )1
1
kY s
s sT=
+
Valor final ( ) kssYs
=rarr0
lim ( ) ktyt
=rarr
lim
( )lim 0s
sY srarr
= ( ) 0lim0
=rarr
tyt
Valor inicial
Valor t = 3T ( ) ( ) kekTty 95013 3 =minus== minus
Valor t = T ( ) ( ) kekTty 63201 1 =minus== minus
Step Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
EjemplosStep Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
01
02
03
04
05
06
07
08
09
1
System g2
Settling Time (sec) 00141
System g1
Settling Time (sec) 0003
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
Ejemplos
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
R3=33k R4=68k0 0005 001 0015 002 0025 003
0
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
Respuesta temporal ante la entrada en escaloacuten
Analiacutetica amp transformadas de Laplace
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
0 T 3T0
0632k
095k
kRespuesta al escaloacuten unitario
Tiempo (s)
Am
pli
tud
( )
Ts
k
s
k
sTsk
sT
k
ssY
11
11
1
1 21
+
+=
+=
+=
( ) ( )Ttekty 1 minusminus=
( )1
1
kY s
s sT=
+
Valor final ( ) kssYs
=rarr0
lim ( ) ktyt
=rarr
lim
( )lim 0s
sY srarr
= ( ) 0lim0
=rarr
tyt
Valor inicial
Valor t = 3T ( ) ( ) kekTty 95013 3 =minus== minus
Valor t = T ( ) ( ) kekTty 63201 1 =minus== minus
Step Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
EjemplosStep Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
01
02
03
04
05
06
07
08
09
1
System g2
Settling Time (sec) 00141
System g1
Settling Time (sec) 0003
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
Ejemplos
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
R3=33k R4=68k0 0005 001 0015 002 0025 003
0
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
Step Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
EjemplosStep Response
Time (sec)
Am
plit
ude
0 0005 001 0015 002 0025 0030
01
02
03
04
05
06
07
08
09
1
System g2
Settling Time (sec) 00141
System g1
Settling Time (sec) 0003
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
Ejemplos
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
R3=33k R4=68k0 0005 001 0015 002 0025 003
0
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Ejemplos
R=100k oacute 470k C=10nF
R=100k C=10nF
R1=33k R2=33k
R3=33k R4=68k0 0005 001 0015 002 0025 003
0
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Ejemplos
0 0005 001 0015 002 0025 0030
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
ScopePulse
Generator
2
1e-3s+1
Av2
2
1e-3s+1
Av1
2
AD
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
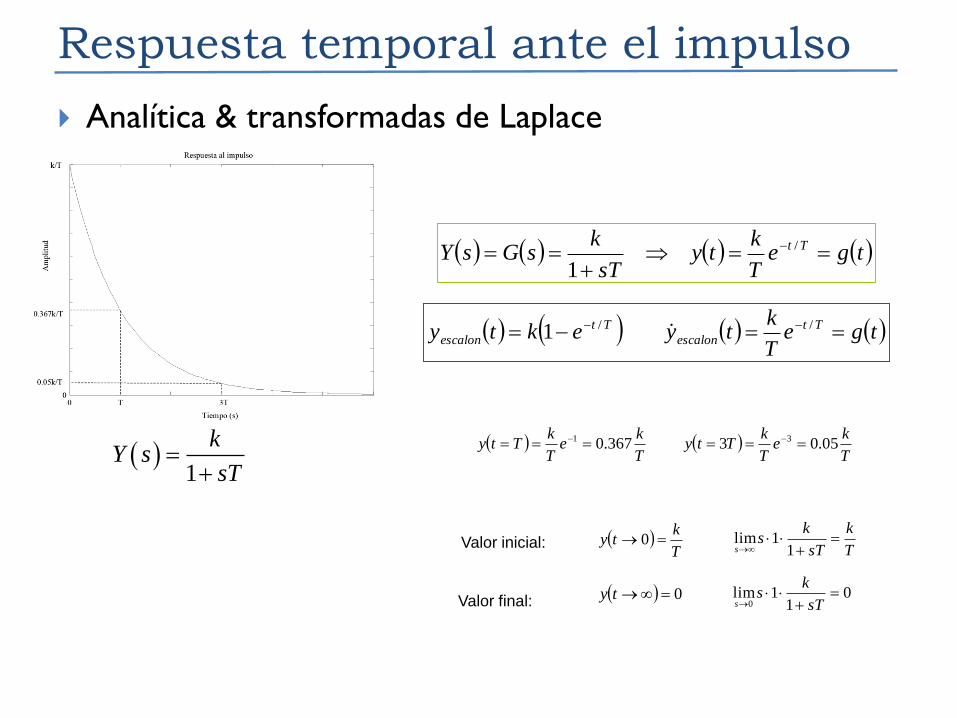
Respuesta temporal ante el impulso
Analiacutetica amp transformadas de Laplace
( )1
kY s
sT=
+
Valor final
Valor inicial
( ) ( ) ( ) ( )tgeT
kty
sT
ksGsY Tt ==
+== minus
1
( )T
ke
T
kTty 36701 === minus ( )
T
ke
T
kTty 0503 3 === minus
( )T
kty =rarr 0
T
k
sT
ks
s=
+
rarr 11lim
( ) 0=rarrty 01
1lim0
=+
rarr sT
ks
s
( ) ( ) ( ) ( )tgeT
ktyekty Tt
escalon
Tt
escalon ==minus= minusminus 1
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
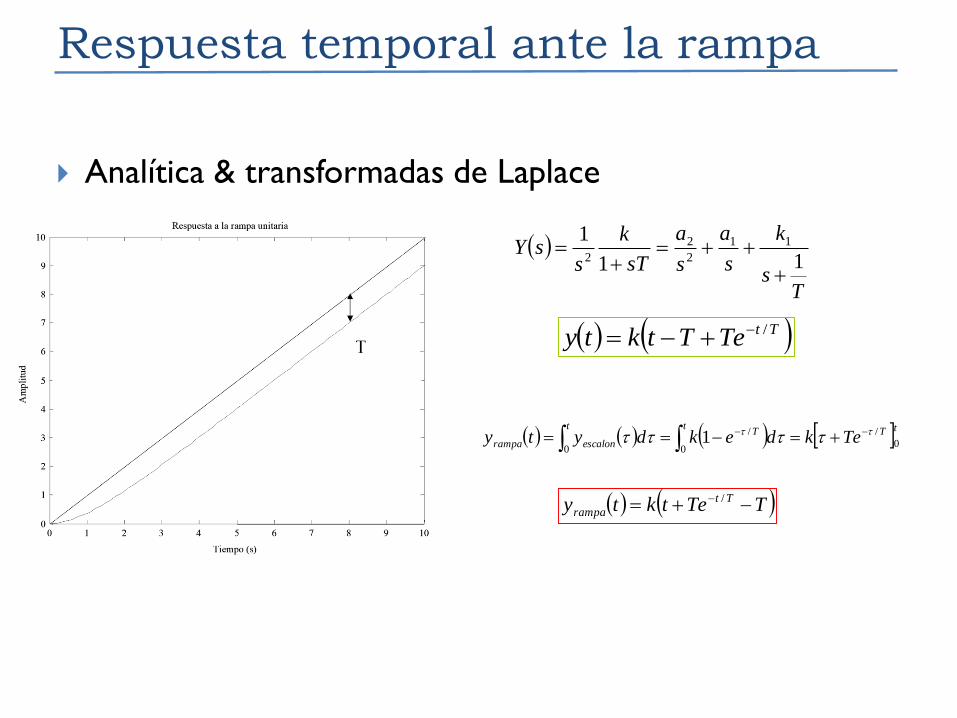
Respuesta temporal ante la rampa
Analiacutetica amp transformadas de Laplace
( )
Ts
k
s
a
s
a
sT
k
ssY
11
1 11
2
2
2
+
++=+
=
( ) ( )TtTeTtkty minus+minus=
( ) ( ) ( ) tTt
Tt
escalonrampa Tekdekdyty 0
0
01 minusminus +=minus==
( ) ( )TTetkty Tt
rampa minus+= minus
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
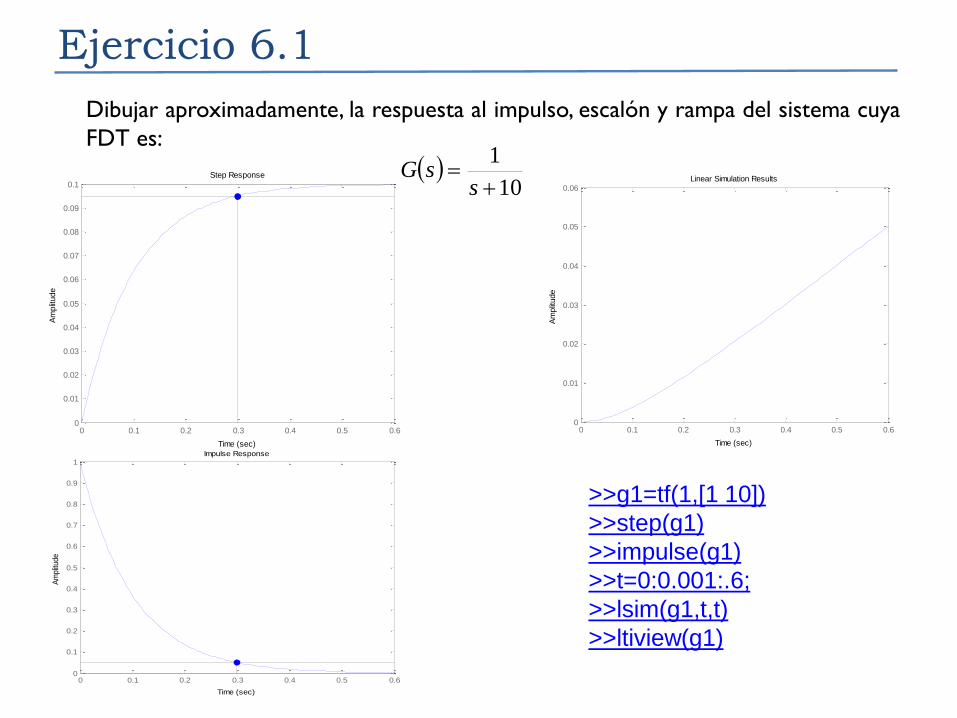
Ejercicio 61
Dibujar aproximadamente la respuesta al impulso escaloacuten y rampa del sistema cuya
FDT es
( )10
1
+=
ssG
gtgtg1=tf(1[1 10])
gtgtstep(g1)
gtgtimpulse(g1)
gtgtt=000016
gtgtlsim(g1tt)
gtgtltiview(g1)
0 01 02 03 04 05 060
001
002
003
004
005
006
007
008
009
01
Step Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
01
02
03
04
05
06
07
08
09
1
Impulse Response
Time (sec)
Am
plit
ude
0 01 02 03 04 05 060
001
002
003
004
005
006
Linear Simulation Results
Time (sec)
Am
plit
ude
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
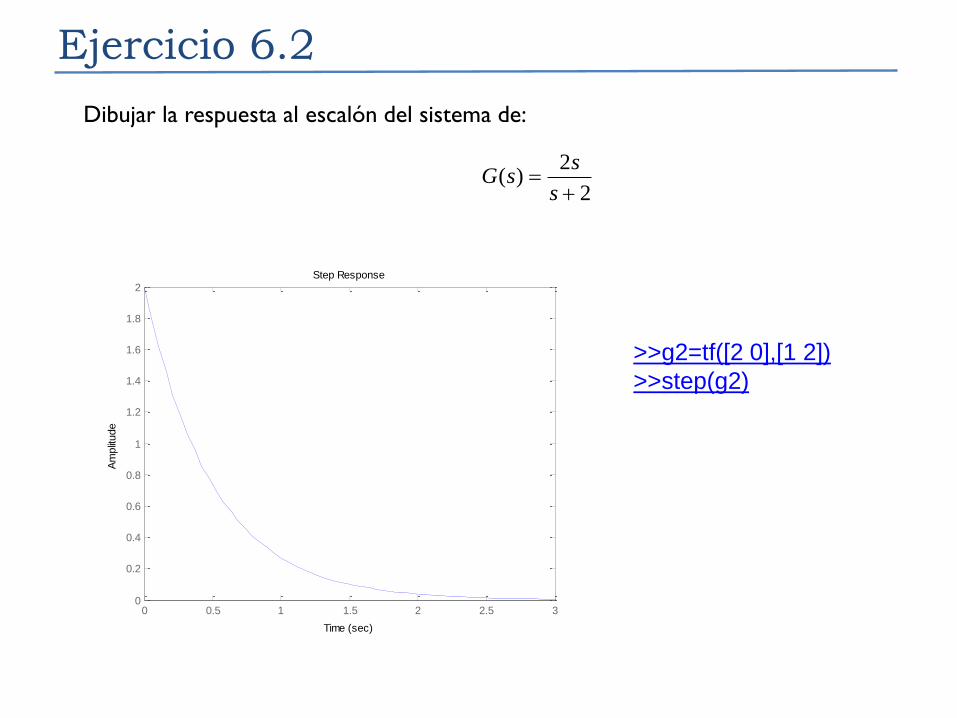
Ejercicio 62
Dibujar la respuesta al escaloacuten del sistema de
2
2)(
+=
s
ssG
0 05 1 15 2 25 30
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg2=tf([2 0][1 2])
gtgtstep(g2)
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
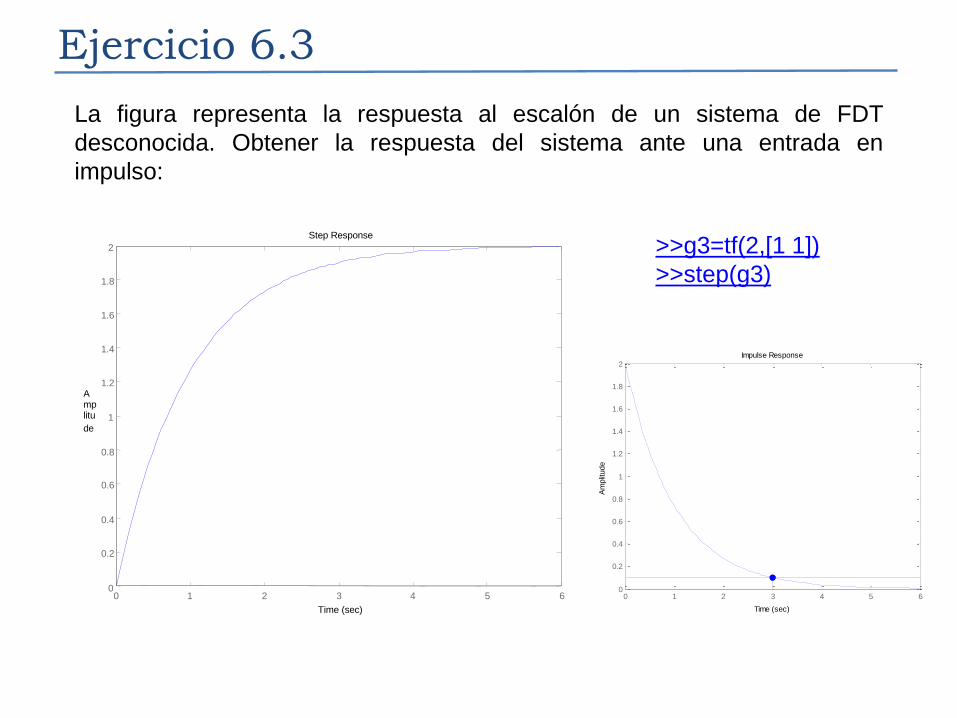
Ejercicio 63
Step Response
Time (sec)
Amplitu
de
0 1 2 3 4 5 6 0
02
04
06
08
1
12
14
16
18
2
La figura representa la respuesta al escaloacuten de un sistema de FDT
desconocida Obtener la respuesta del sistema ante una entrada en
impulso
gtgtg3=tf(2[1 1])
gtgtstep(g3)
0 1 2 3 4 5 60
02
04
06
08
1
12
14
16
18
2
Impulse Response
Time (sec)A
mplit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
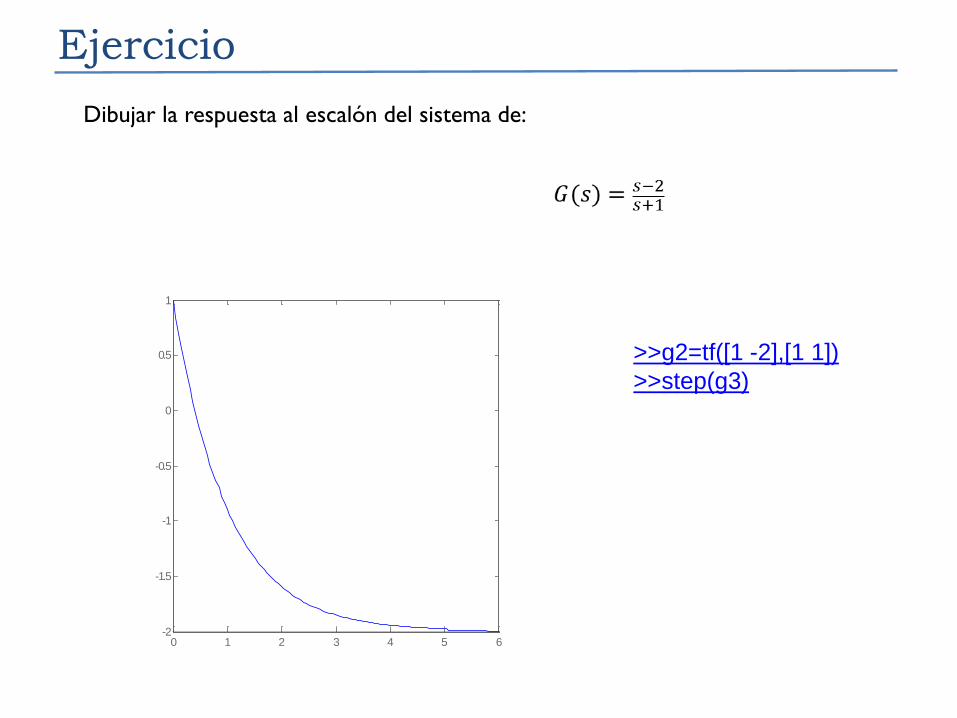
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 -2][1 1])
gtgtstep(g3)
0 1 2 3 4 5 6-2
-15
-1
-05
0
05
1
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
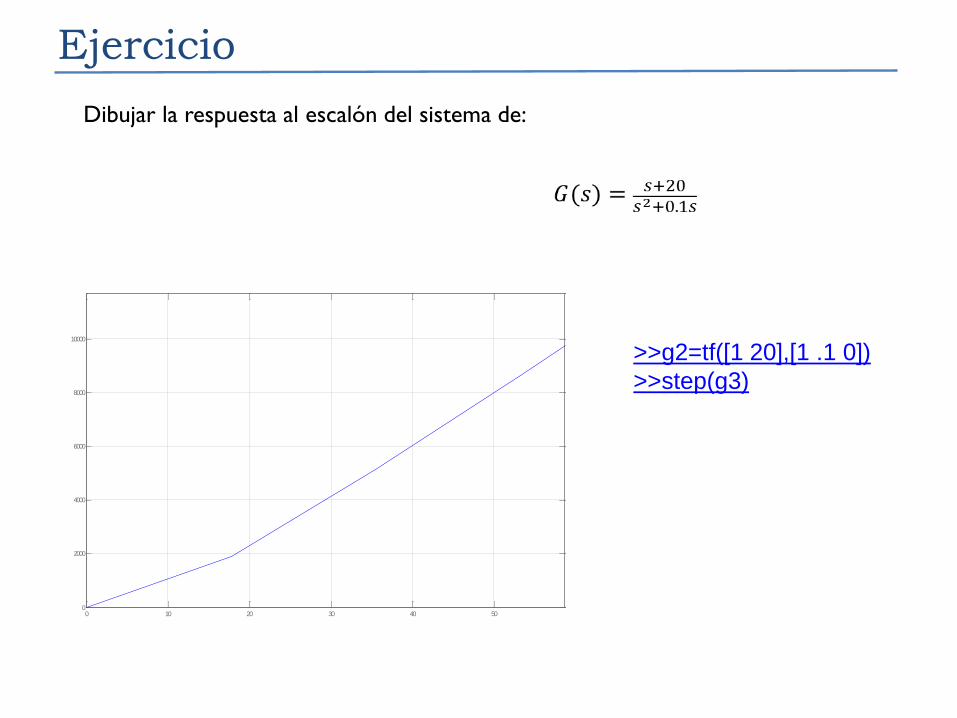
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
gtgtg2=tf([1 20][1 1 0])
gtgtstep(g3)
0 10 20 30 40 500
2000
4000
6000
8000
10000
Step Response
Time (sec)
Am
plit
ude
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
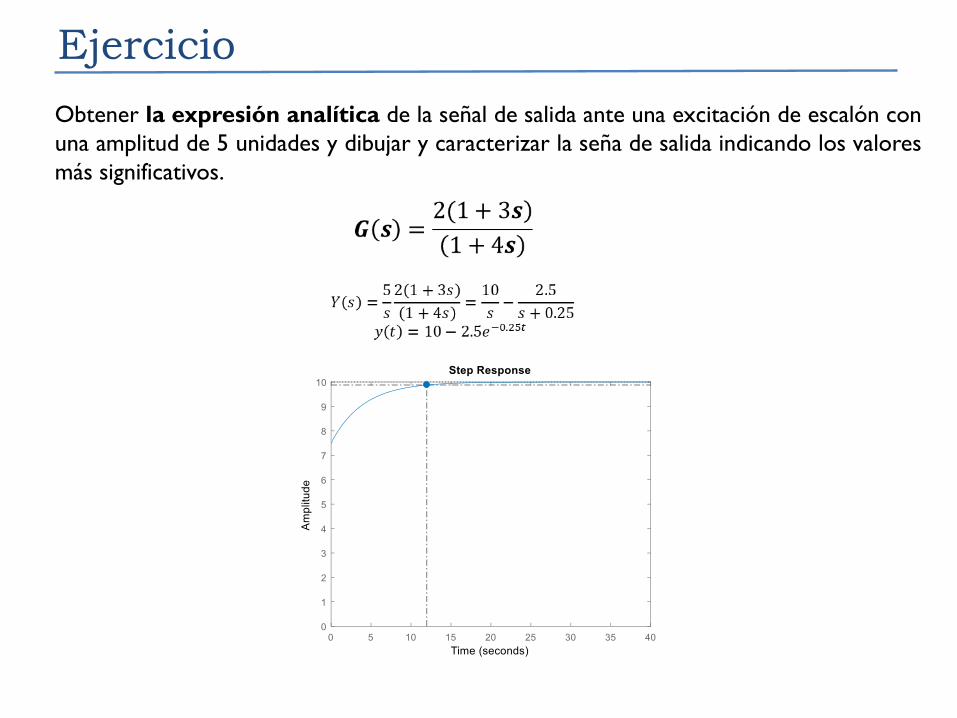
Ejercicio
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de escaloacuten con
una amplitud de 5 unidades y dibujar y caracterizar la sentildea de salida indicando los valores
maacutes significativos
Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Anaacutelisis temporal de sistemas de segundo orden
Modelo
Sistema de segundo orden simple
2
10
2
10 xbxbxbyayaya ++=++
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
( )( )( )
( )( ) 2
210
2
210
sasaa
sbsbb
sX
sYsG
++
++==
( )2
210
0
sasaa
bsG
++=
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
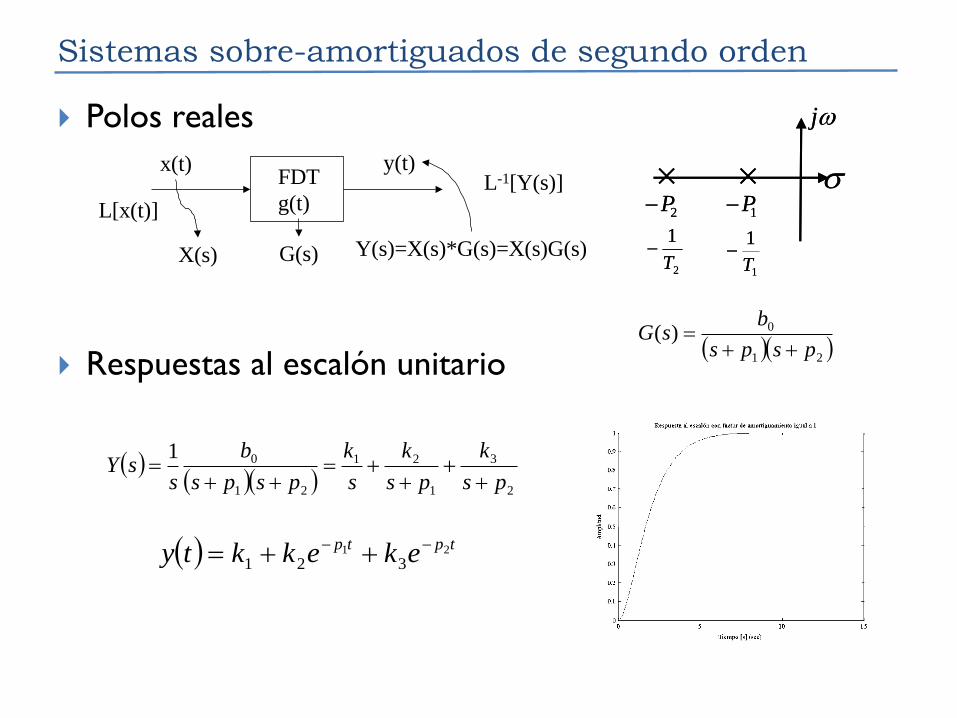
Sistemas sobre-amortiguados de segundo orden
Polos reales
Respuestas al escaloacuten unitario
FDT
g(t)
x(t) y(t)
X(s) G(s) Y(s)=X(s)G(s)=X(s)G(s)
L[x(t)]
L-1[Y(s)]
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
j
2Pminus 1Pminus
2
1
Tminus
1
1
Tminus
( )( )21
0)(psps
bsG
++=
( )( )( ) 2
3
1
21
21
01
ps
k
ps
k
s
k
psps
b
ssY
++
++=
++=
( ) tptpekekkty 21
321
minusminus++=
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
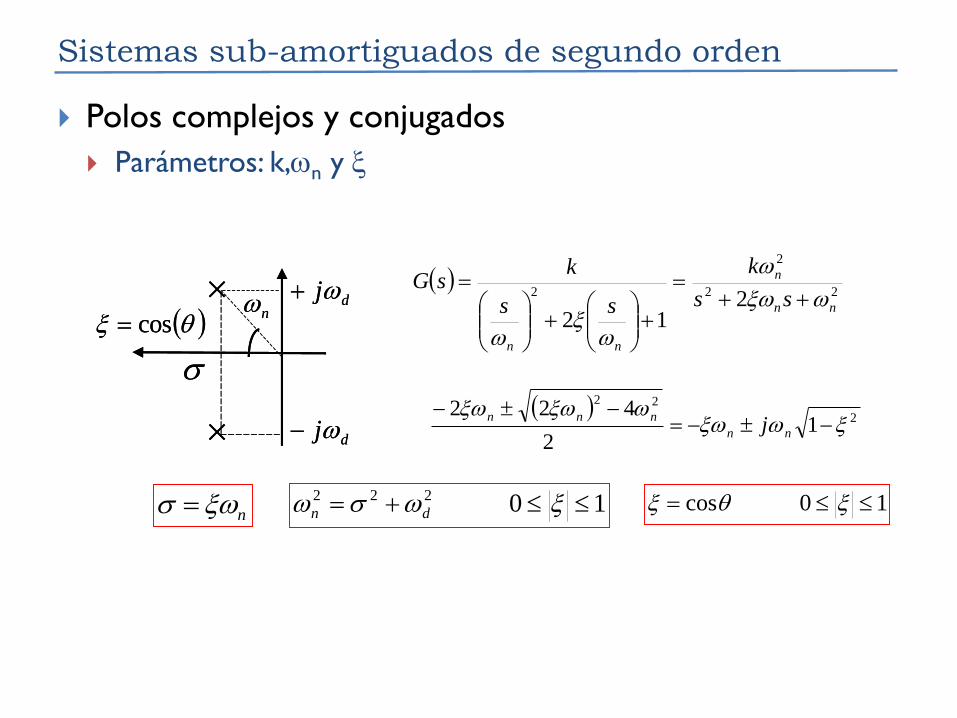
Sistemas sub-amortiguados de segundo orden
Polos complejos y conjugados
Paraacutemetros kn y
dj+
djminus
n( ) cos=
dj+
djminus
n( ) cos=
( )22
2
2 212
nn
n
nn
ss
k
ss
ksG
++=
+
+
=
( )2
22
12
422
minusminus=
minusminusnn
nnnj
n = 10222 += dn10cos =
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
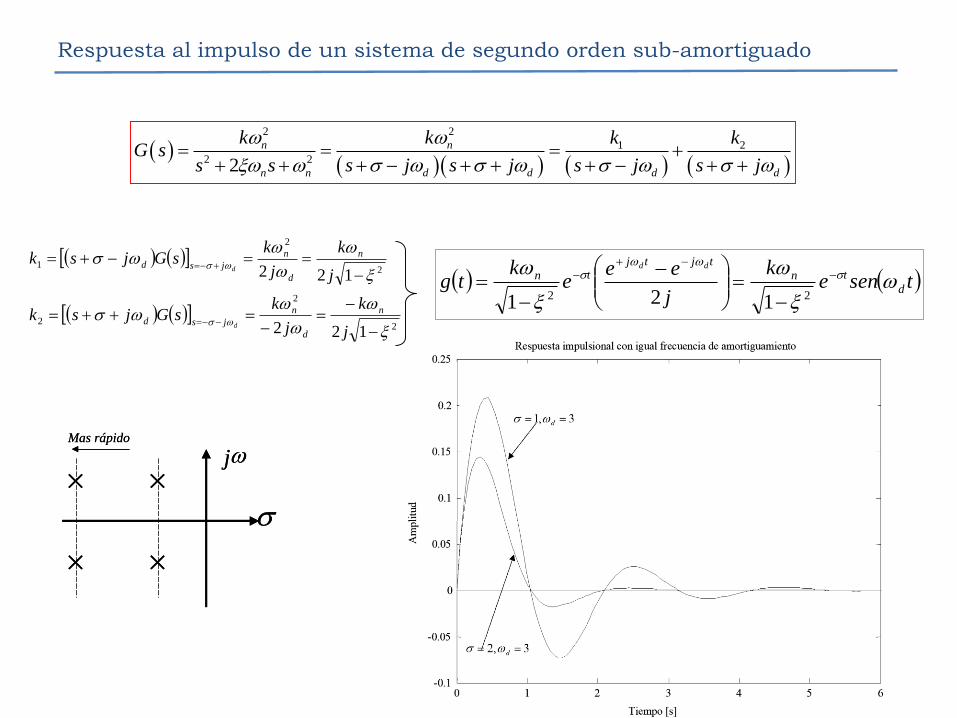
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( )( )( ) ( ) ( )
2 2
1 2
2 22
n n
d d d dn n
k k k kG s
s j s j s j s js s
= = = +
+ minus + + + minus + ++ +
( ) ( )
( ) ( ) 2
2
2
2
2
1
122
122
minus
minus=
minus=++=
minus==minus+=
minusminus=
+minus=
j
k
j
ksGjsk
j
k
j
ksGjsk
n
d
n
jsd
n
d
n
jsd
d
d
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
Mas raacutepido
j
Mas raacutepido
j
Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Respuesta al impulso de un sistema de segundo orden sub-amortiguado
( ) ( )tsenek
j
eee
ktg d
tn
tjtjtn
dd
minusminus+
minus
minus=
minus
minus=
22 121
j
j
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
0 1 2 3 4 5 6-01
-005
0
005
01
015
02
025
Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
pli
tud
31 == d
51 == d
Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Respuesta al escaloacuten en sistemas de 2ordmSituacioacuten del polo Respuesta al escaloacuten Sistema
Sobre
Amortiguado
gt1
Criacuteticamente
amortiguado
=1
Sub
amortiguado
0ltlt1
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
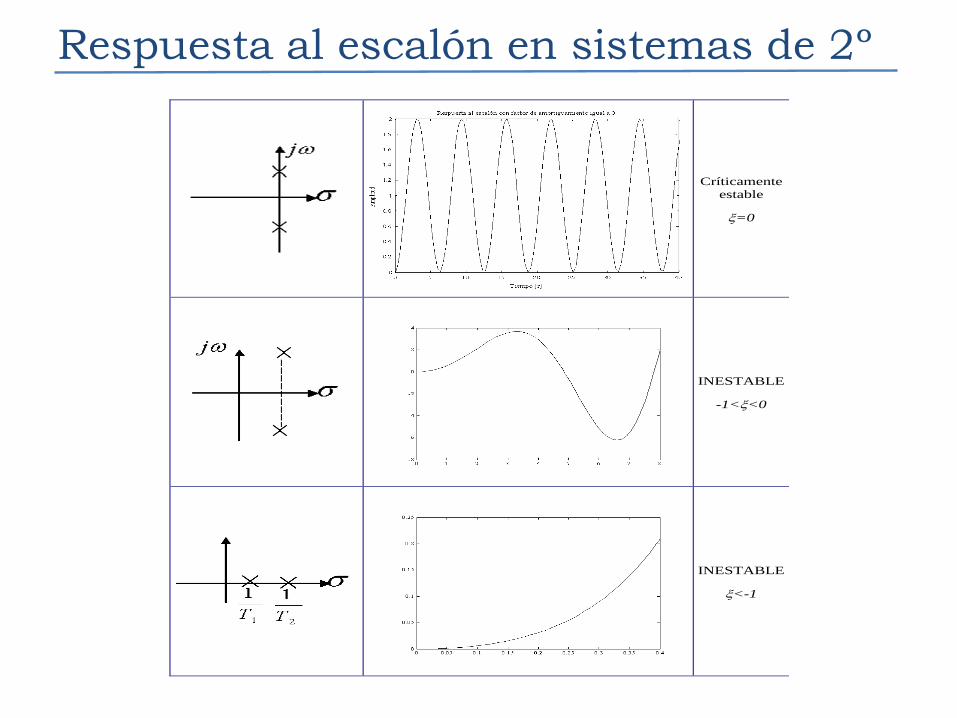
Respuesta al escaloacuten en sistemas de 2ordm
Criacuteticamente
estable
=0
INESTABLE
-1ltlt0
INESTABLE
lt-1
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
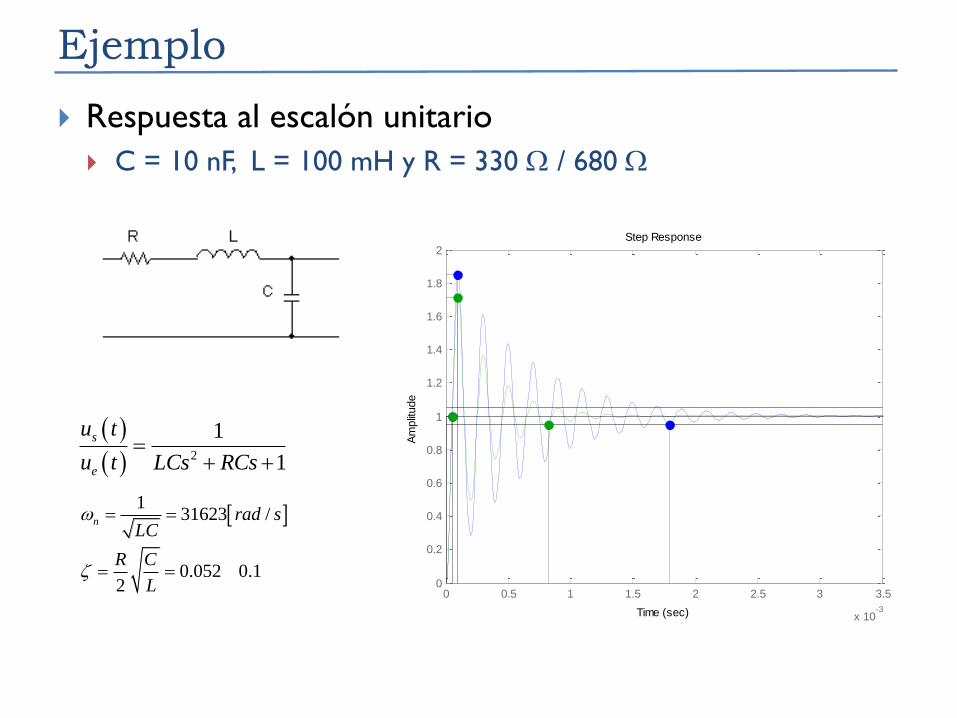
Ejemplo
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
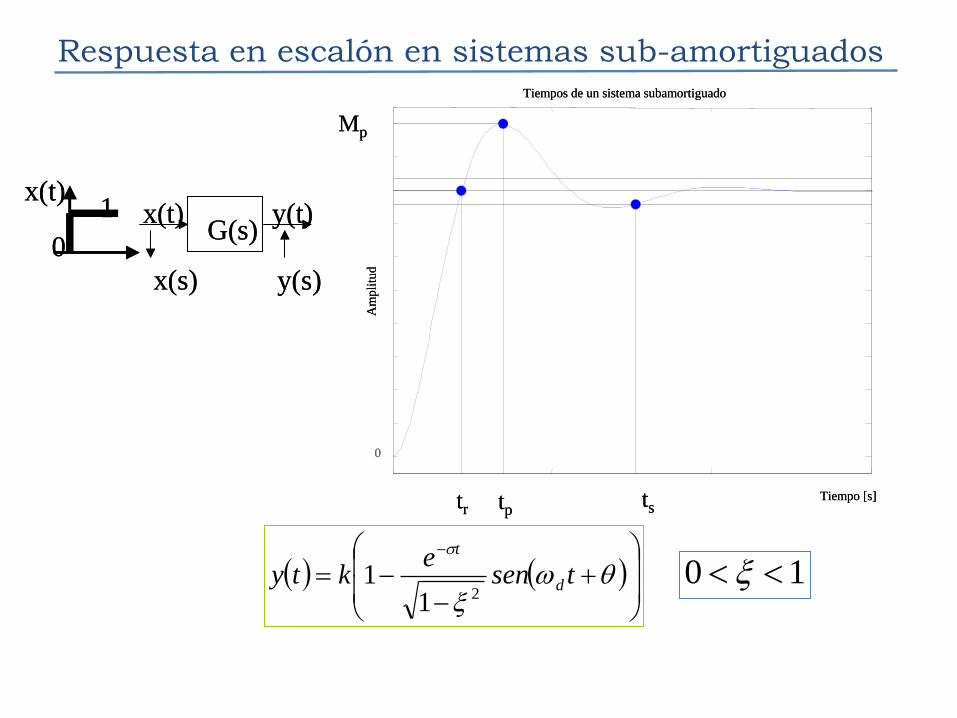
Respuesta en escaloacuten en sistemas sub-amortiguados
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
x(t) y(t)G(s)
1
0
x(t)
x(s) y(s)
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211 10
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
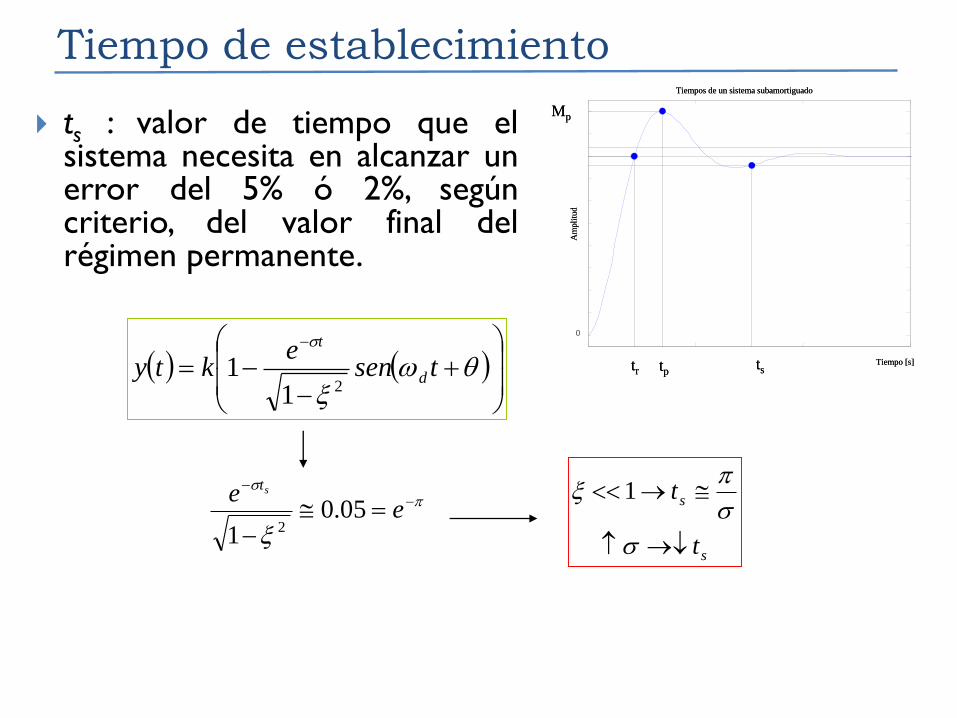
ts valor de tiempo que elsistema necesita en alcanzar unerror del 5 oacute 2 seguacutencriterio del valor final delreacutegimen permanente
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
minusminus
=minus
ee st
0501 2
s
s
t
t
rarr
rarr
1
Tiempo de establecimiento
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
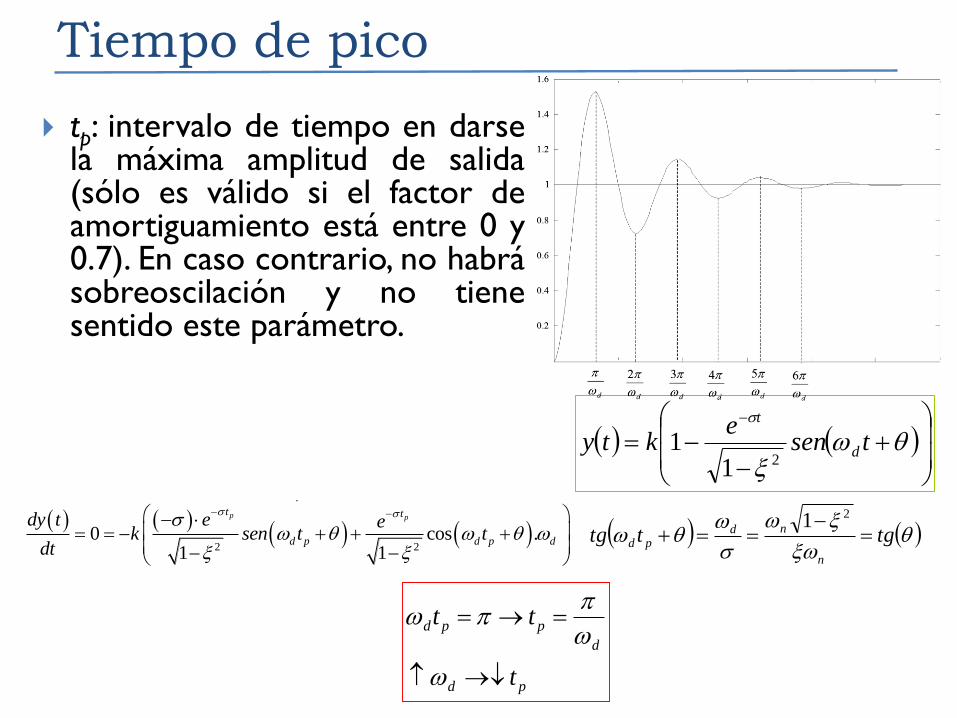
Tiempo de pico
tp intervalo de tiempo en darsela maacutexima amplitud de salida(soacutelo es vaacutelido si el factor deamortiguamiento estaacute entre 0 y07) En caso contrario no habraacutesobreoscilacioacuten y no tienesentido este paraacutemetro
( ) ( )
+
minusminus=
minus
tsene
kty d
t
211
( ) ( )( ) ( )
2 20 cos
1 1
p pt t
d p d p d
dy t e ek sen t t
dt
minus minus minus = = minus + + + minus minus
pd
d
ppd
t
tt
rarr
=rarr=
( ) ( )
tgttg
n
ndpd =
minus==+
21
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
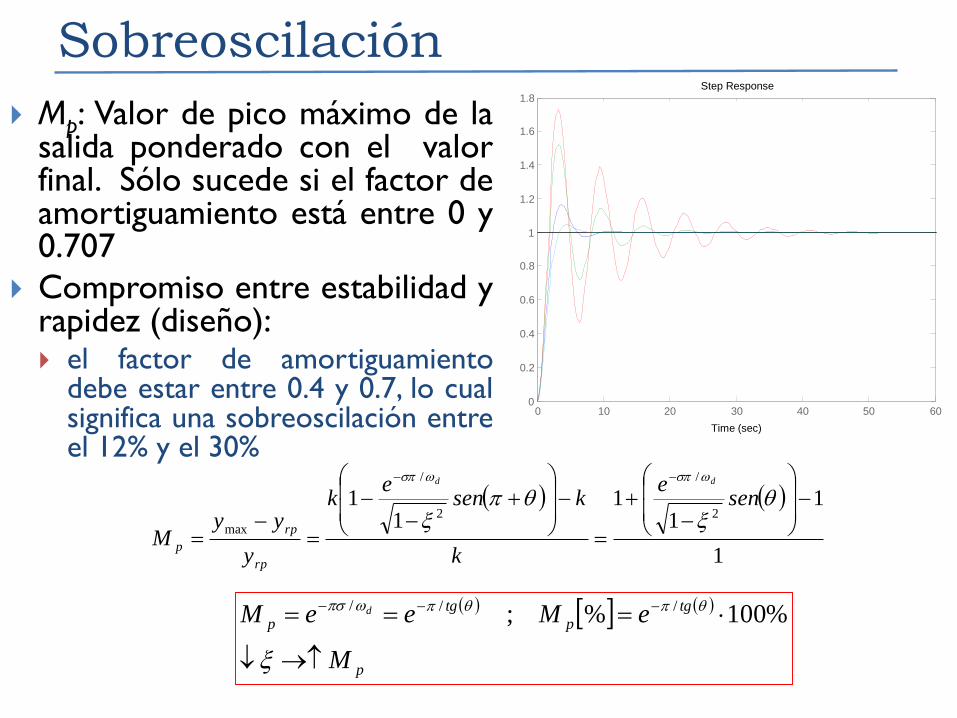
Sobreoscilacioacuten
Mp Valor de pico maacuteximo de lasalida ponderado con el valorfinal Soacutelo sucede si el factor deamortiguamiento estaacute entre 0 y0707
Compromiso entre estabilidad yrapidez (disentildeo) el factor de amortiguamiento
debe estar entre 04 y 07 lo cualsignifica una sobreoscilacioacuten entreel 12 y el 30
( ) ( )
1
11
11
12
2
max
minus
minus+
=
minus
+
minusminus
=minus
=
minusminus
sene
k
ksene
k
y
yyM
dd
rp
rp
p
0 10 20 30 40 50 600
02
04
06
08
1
12
14
16
18Step Response
Time (sec)
( ) ( )
p
tg
p
tg
p
M
eMeeM d
rarr
=== minusminusminus
100
Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Tiempo de subida
tr el tiempo transcurrido en
alcanzar por primera vez el
100 del valor final de la sentildeal
de salida
( ) ( ) 001 2
=+rarr=+minus
minus
rdrd
t
tsentsene
d
rrd tt
minus=rarr=+
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
0
Tiempos de un sistema subamortiguado
Tiempo [s]
Am
pli
tud
tr tpts
Mp
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
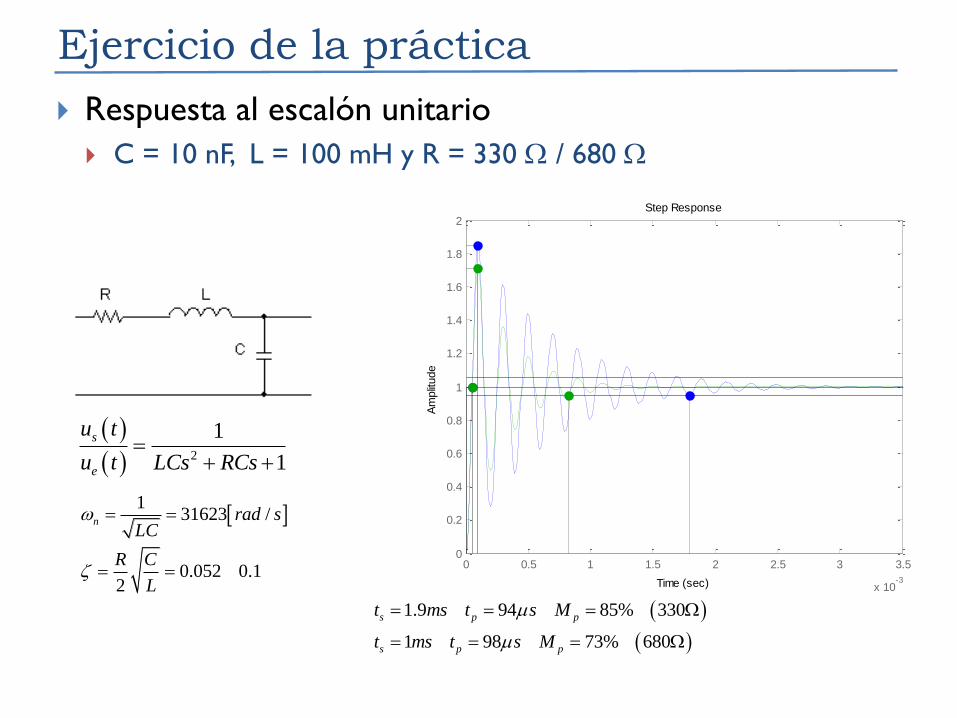
Ejercicio de la praacutectica
( )
( )
19 94 85 330
1 98 73 680
s p p
s p p
t ms t s M
t ms t s M
= = =
= = =
Respuesta al escaloacuten unitario
C = 10 nF L = 100 mH y R = 330 680
( )
( ) 2
1
1
s
e
u t
u t LCs RCs=
+ +
1
31623
0052 012
n rad sLC
R C
L
= =
= =
Step Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35
x 10-3
0
02
04
06
08
1
12
14
16
18
2
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
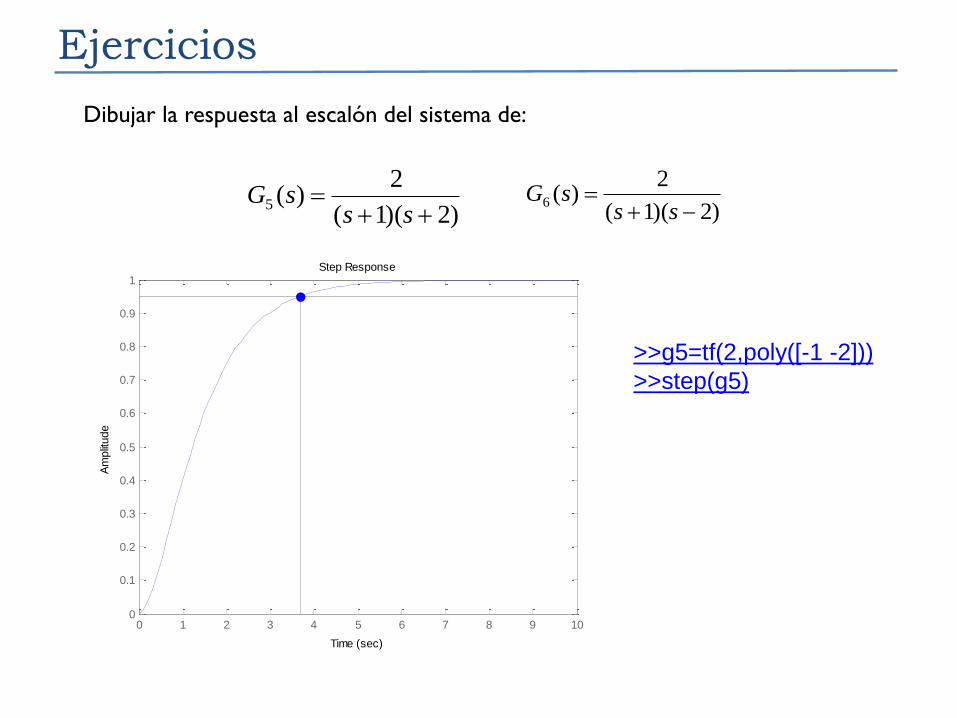
Ejercicios
Dibujar la respuesta al escaloacuten del sistema de
gtgtg5=tf(2poly([-1 -2]))
gtgtstep(g5)
)2)(1(
2)(6
minus+=
sssG
)2)(1(
2)(5
++=
sssG
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
01
02
03
04
05
06
07
08
09
1
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
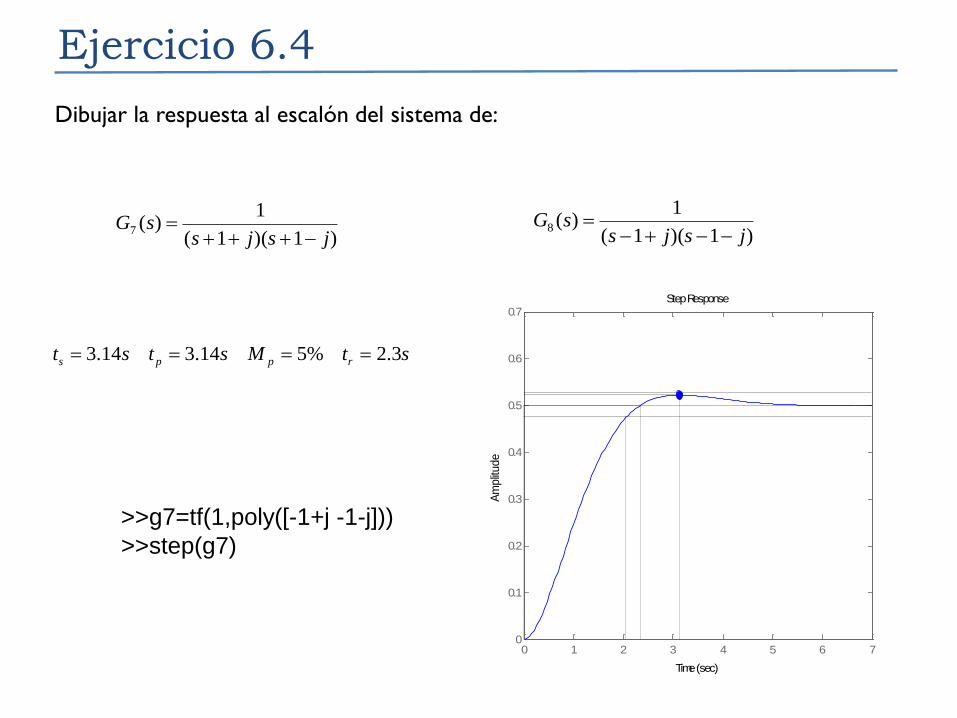
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
)1)(1(
1)(8
jsjssG
minusminus+minus=
)1)(1(
1)(7
jsjssG
minus+++=
314 314 5 23s p p rt s t s M t s= = = =
gtgtg7=tf(1poly([-1+j -1-j]))
gtgtstep(g7)
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
01
02
03
04
05
06
07
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
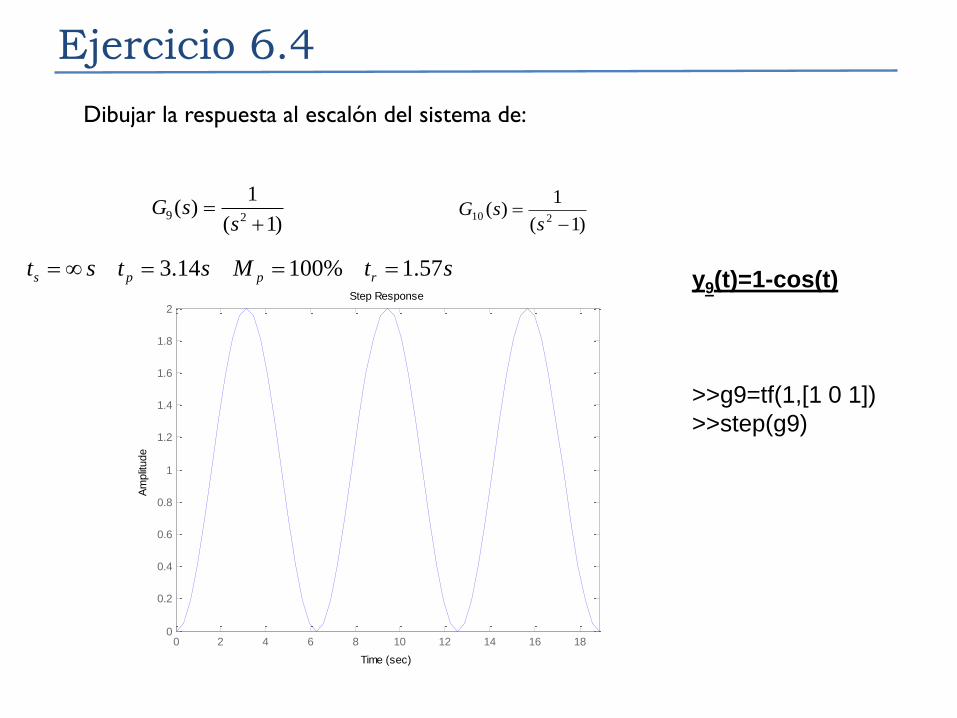
Ejercicio 64
Dibujar la respuesta al escaloacuten del sistema de
314 100 157s p p rt s t s M t s= = = =
)1(
1)(
29+
=s
sG)1(
1)(
210minus
=s
sG
0 2 4 6 8 10 12 14 16 180
02
04
06
08
1
12
14
16
18
2
Step Response
Time (sec)
Am
plit
ude
gtgtg9=tf(1[1 0 1])
gtgtstep(g9)
y9(t)=1-cos(t)
Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Ejercicio 69
El sistema de la figura responde ante una aplicacioacuten bruscade una fuerza de 20kg apartaacutendose de su posicioacuten deequilibrio como se indica a continuacioacuten Determinar M B yk
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 s
Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

Ejercicio 69
M
k 20kg
B
x(t)
95mm
x(t)
01m
2 sStep Response
Time (sec)
Am
plit
ude
0 05 1 15 2 25 3 35 4 450
002
004
006
008
01
012
System untitled1
Peak amplitude 0109
Overshoot () 948
At time (sec) 197
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
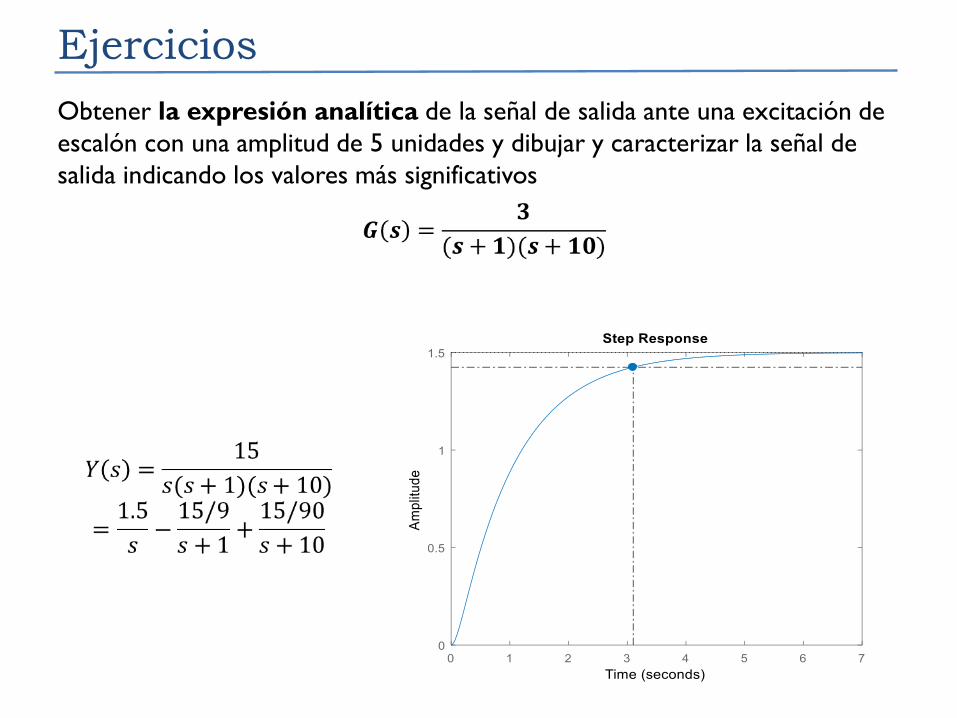
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildeal de
salida indicando los valores maacutes significativos
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
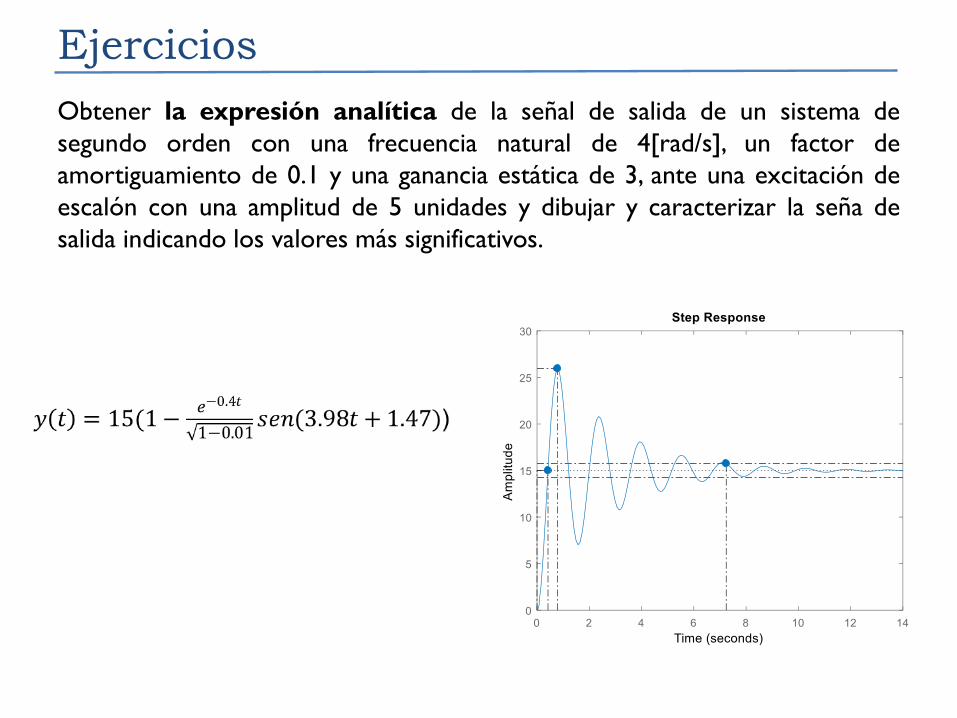
Ejercicios
Obtener la expresioacuten analiacutetica de la sentildeal de salida de un sistema de
segundo orden con una frecuencia natural de 4[rads] un factor de
amortiguamiento de 01 y una ganancia estaacutetica de 3 ante una excitacioacuten de
escaloacuten con una amplitud de 5 unidades y dibujar y caracterizar la sentildea de
salida indicando los valores maacutes significativos
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
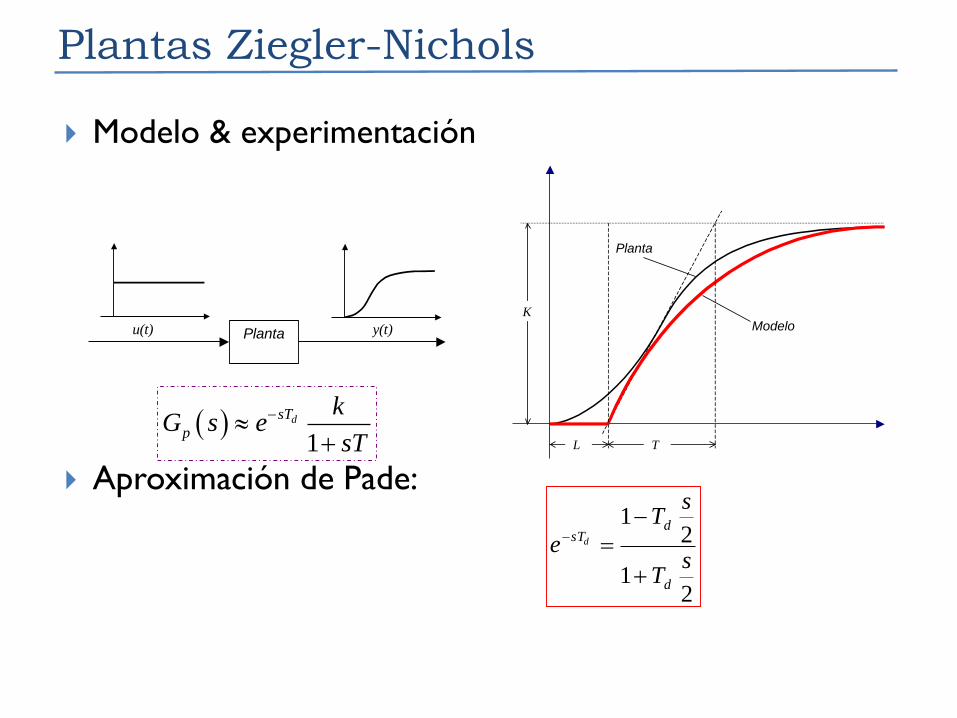
Plantas Ziegler-Nichols
Modelo amp experimentacioacuten
Aproximacioacuten de Pade
Planta u(t) y(t)
K
L T
Modelo
Planta
( )1
dsT
p
kG s e
sT
minus
+
21
21
sT
sT
e
d
dsTd
+
minus
=minus
El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude

El equipo Peltier
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
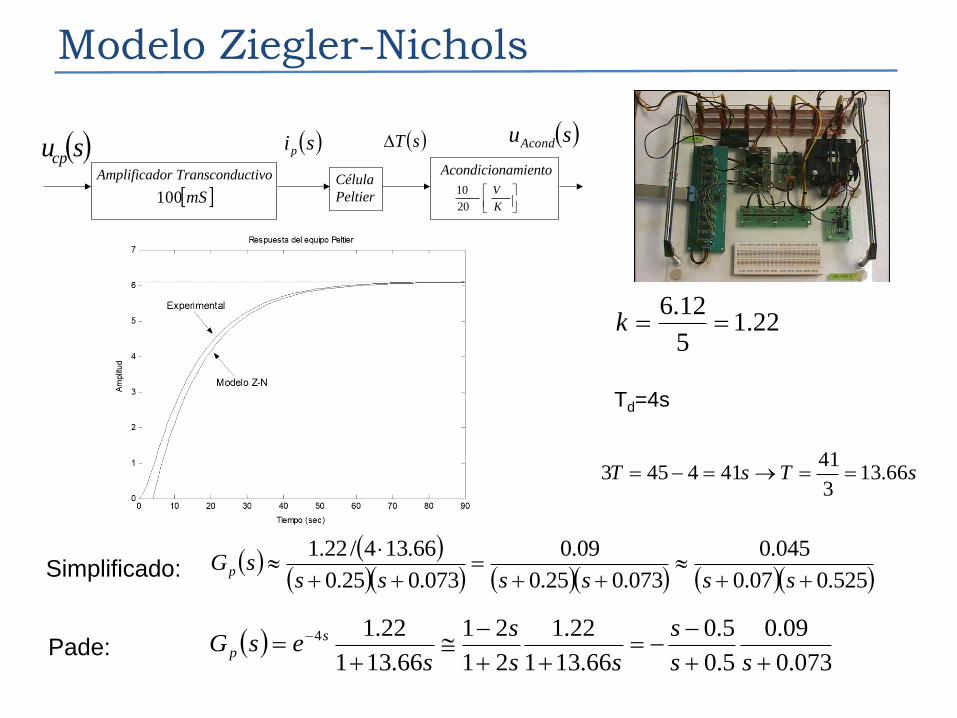
Modelo Ziegler-Nichols
Ceacutelula
Peltier
Acondicionamiento
K
V
20
10
Amplificador Transconductivo
mS100
( )sucp( )sip
( )sT ( )suAcond
2215
126==k
Td=4s
sTsT 66133
41414453 ==rarr=minus=
( )0730
090
50
50
66131
221
21
21
66131
2214
++
minusminus=
++
minus
+= minus
ss
s
ss
s
sesG s
p
( )( )
( )( ) ( )( ) ( )( )5250070
0450
0730250
090
0730250
66134221
++
++=
++
sssssssGp
Pade
Simplificado
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude
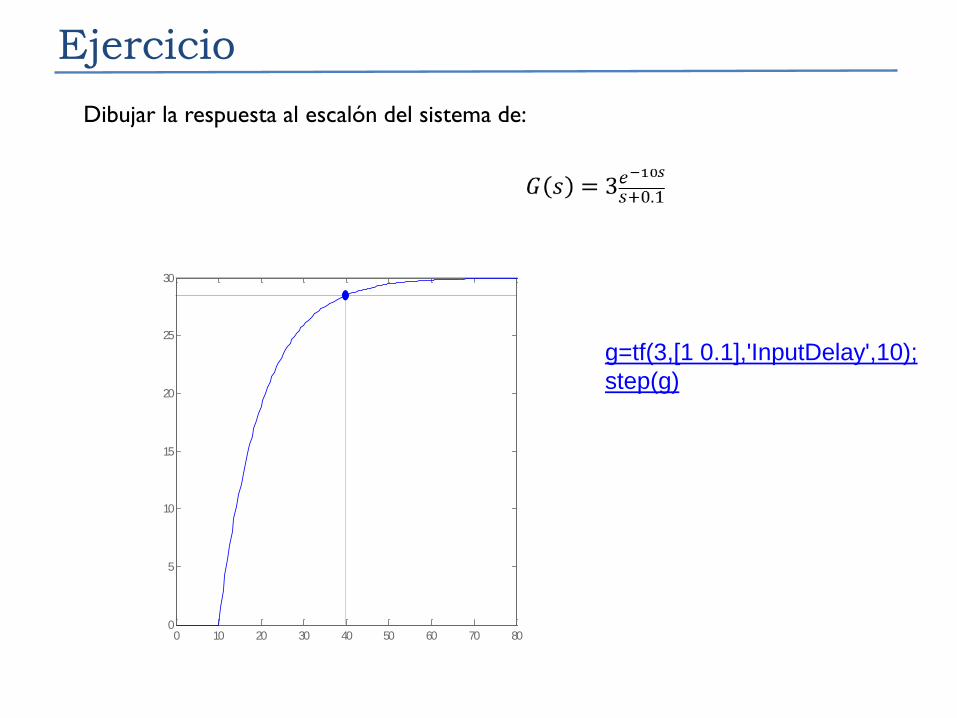
Ejercicio
Dibujar la respuesta al escaloacuten del sistema de
g=tf(3[1 01]InputDelay10)
step(g)
0 10 20 30 40 50 60 70 800
5
10
15
20
25
30
Step Response
Time (sec)
Am
plit
ude