Capítulo V - adrosa.netadrosa.net/PDF/Elec2/Capítulo 5.pdf... un filtro pasa bajos, ... de manera...
13
Capítulo V Filtros Activos 5.1) Filtros de onda Se trata de circuitos que modifican el espectro de una señal, por ejemplo, un filtro pasa bajos, modificará el espectro de la señal de entrada al mismo, de manera que elimina las componentes de frecuencias, altas, por encima de la de corte. Es así que el espectro de la señal de salida contendrá componentes de alta frecuencia de muy baja amplitud o nulas. Definimos la transferencia del filtro, por ejemplo para la tensión como: Se observa el uso de la variable s, que se denomina variable de Laplace, pues es la empleada en la llamada Transformada de Laplace; es una variable comple- ja, que tiene en cuenta la frecuencia (componente imagina- ria) y la atenuación (componente real). Es decir s = σ + j ω La transferencia del filtro se evalúa en una frecuencia real, sobre el eje imaginario, es decir para s = j ω. Además, por ser la transferencia una función compleja, tendrá módulo y fase. Es decir que el filtro no sólo modificará el espectro de la señal a tratar, sino también su fase. Podríamos entonces expresar: , haciendo uso de las exponenciales complejas. Por otra parte, habitualmente el módulo de la trans- ferencia se especifica en dB, de manera que , donde G(ω), representa la función de ganancia. Si la tomamos con signo negativo, la llama- remos función de atenuación. Un filtro, de algún modo “da forma” al espectro de la señal que se desea modificar, lo cual puede entenderse en virtud de la relación: Los filtros pueden tener distintas características, según las frecuencias que atenúan y las que dejan pasar libremente. Los filtros ideales tendrán curvas de transferencia de módulo como las dibujadas a continuación: Fig. 5.1 La banda pasante o de paso es la que permite que pasen las componentes espectrales, sin atenuación, mientras que la ban- da suprimida o de atenuación es el rango de frecuencia para el cual las señales son atenuadas y desaparecen de la salida.
Transcript of Capítulo V - adrosa.netadrosa.net/PDF/Elec2/Capítulo 5.pdf... un filtro pasa bajos, ... de manera...

Capítulo V
Filtros Activos 5.1) Filtros de onda
Se trata de circuitos que modifican el espectro de una señal, por ejemplo, un filtro pasa bajos, modificará el espectro de la señal de entrada al mismo, de manera que elimina las componentes de frecuencias, altas, por encima de la de corte. Es así que el espectro de la señal de salida contendrá componentes de alta frecuencia de muy baja amplitud o nulas.
Definimos la transferencia del filtro, por ejemplo para la tensión como:
Se observa el uso de la variable s, que se denomina variable de Laplace, pues es la empleada en la llamada Transformada de Laplace; es una variable comple-ja, que tiene en cuenta la frecuencia (componente imagina-ria) y la atenuación (componente real). Es decir s = σ + j ω
La transferencia del filtro se evalúa en una frecuencia real, sobre el eje imaginario, es decir para s = j ω. Además, por ser la transferencia una función compleja, tendrá módulo y fase. Es decir que el filtro no sólo modificará el espectro de la señal a tratar, sino también su fase. Podríamos entonces expresar:
, haciendo uso de las exponenciales complejas. Por otra parte, habitualmente el módulo de la trans-ferencia se especifica en dB, de manera que
, donde G(ω), representa la función de ganancia. Si la tomamos con signo negativo, la llama-remos función de atenuación. Un filtro, de algún modo “da forma” al espectro de la señal que se desea modificar, lo cual puede entenderse en virtud de la relación:
Los filtros pueden tener distintas características, según las frecuencias que atenúan y las que dejan pasar libremente. Los filtros ideales tendrán curvas de transferencia de módulo como las dibujadas a continuación:
Fig. 5.1
La banda pasante o de paso es la que permite que pasen las componentes espectrales, sin atenuación, mientras que la ban-da suprimida o de atenuación es el rango de frecuencia para el cual las señales son atenuadas y desaparecen de la salida.

Sin embargo los filtros con las características ideales, dibujadas anteriormente, no pueden realizarse por limitaciones teó-ricas, por lo tanto, una forma de la curva de transferencia más realista es la indicada a continuación:
Fig. 5.2
Fig. 5.3
En estas curvas de transferencia correspondientes a filtros reales, se observa, además de las bandas de atenuación o supri-midas, bandas intermedias, llamadas de transición y que obedecen al hecho de la imposibilidad de los cambios abruptos en la atenuación, tipo “pared de ladrillo”. Por lo tanto para diseñar un filtro, será necesario primeramente, especificar, de acuerdo a las necesidades, la curva de transferencia con los valores indicados, donde ellos representan:
Amáx, es el valor máximo admitido de atenuación en la banda de paso, es decir el valor máximo que se acepta que el filtro atenúe en la banda de paso (en la cual no debería haber atenuación). Se trata pues de un “techo” Este valor, según la apli-cación es tolerado entre 0,5 y 3 dB, respecto de los 0 dB que debería tener idealmente.
Amín es el valor de la mínima atenuación que se acepta en la banda suprimida, es decir, se trata de un “piso”, de ahí en adelante es beneficioso que sea superior su valor, de manera que se acerque más al caso de la atenuación total del filtro ideal. En general, se adoptan valores entre 20 y 100 dB.
Habrá que especificar entonces, para un diseño los valores anteriores con las frecuencias correspondientes a cada uno de ellos. Es decir es menester especificar los valores de ωp y ωs, que definen el comienzo y el final de la banda de transición, es decir se extiende desde el borde de la banda de paso al borde de la banda suprimida. Suele usarse, la relación , para definir la calidad del filtro y se llama selectividad. Además, podemos mencionar que como regla general, se especifi-ca el valor de transferencia de 0 dB, como referencia para la banda de paso, de manera de referir todos los demás valores a él. Como resumen, podemos decir que las especificaciones que deberemos tener en cuenta para el diseño de un filtro son:
• Valor máximo de atenuación en el borde de la banda de paso Amáx. • Borde de la banda de paso, es decir, en general el valor para el que aparece Amáx , al que llamamos ωp • Valor mínimo de atenuación admitido en la banda de atenuación Amín • Borde de la banda de atenuación o banda suprimida ωs, es decir el valor de frecuencia para el que aparece Amín
Finalmente, cuanto más alto sea el valor de Amín, cuanto más bajo sea el de Amáx y cuanto más cercano a la unidad esté la relación , entonces el filtro se aproximará más al ideal, pero será más complejo y caro.
Además, en algunas aplicaciones es importante también la respuesta de fase, pero en este opúsculo no la analizaremos.
5.2) Función de transferencia del filtro.
La función de transferencia de un filtro, se expresa como el cociente de polinomios, de la forma
, donde deberá cumplirse, para que pueda ser realizado que el grado del polinomio del numerador sea menor o igual al del denominador, es decir que la transferencia no puede tender a infinito para frecuen-cias que tiendan a infinito, es decir la condición se expresa como M ≤ N. Además, como los polinomios pueden factorear-se, conociendo sus raíces, otra forma y tal vez la más común de expresar la transferencia es
Por su parte, las raíces del numerador, son los ceros de la transferencia y las del

denominador, son los polos de la transferencia. Tanto los ceros como los polos pueden ser complejos y en tal caso serán complejos conjugados, es decir, que de ser complejos, siempre se presentarán de a pares conjugados. Los ceros habitual-mente están sobre el eje imaginario, es decir, son imaginarios puros y los polos, deben todo tener componentes reales ne-gativas, es decir que los polos estarán siempre en el semiplano izquierdo. Esto ocurre, porque los polos de la transferencia, definen la respuesta temporal del circuito, de manera que si la “atenuación” fuera positiva, la respuesta crecería indefini-damente con el tiempo, lo que no condice con la realidad, es decir que no es posible. El filtro, cuya transferencia está di-bujada en la fig. 5.2, puede tener un diagrama de polos y ceros como el indicado a continuación:
Fig. 5.4
El número de ceros en infinito que puede tener una transfe-rencia está dado por la diferencia N – M, ya que al ser ma-yor el grado del denominador, entonces cuando , la transferencia debe tender a cero.
∞
En la gráfica de la fig. 5.5, se aprecia una curva de transfe-rencia que tiene todos sus ceros en infinito. Su diagrama de polos y ceros podría ser como el indicado en la fig. 5.6. Finalmente, si todos los ceros estuvieran en infinito, como el caso indicado, la transferencia sería de “sólo polos” y tomaría la forma indicada a continuación:
Fig. 5.5
Fig. 5.6
Ejemplo 5.2.1:
Un filtro de segundo orden tiene polos en . Por otra parte, la transmisión es cero en 2 rad/s y es unitaria en cero. Escriba la expresión de la transferencia e indique qué tipo de filtro es.
Solución: Al tener polos complejos conjugados, definen un polinomio de segundo grado, el cual podemos reconstruir a partir de sus raíces. Sabemos que , de manera que operando con las raíces, resulta , por otra
parte y operando, resulta una diferencia de cuadrados, de manera que como , se transforma en una
suma y resulta , de donde resulta el denominador . Por otra parte, los ceros deben ser complejos conju-
gados y está sobre el eje imaginario, son imaginarios puros, por lo tanto quedará el numerado . Finalmente, debe-
remos añadir una constante para logran escalar a 1 la transferencia en cero, por lo que quedará
r
:

Vemos que en cero la trasferencia adquiere el valor 4, por lo que, la constante deberá ser ¼. Por último la trans-
ferencia completa es
Queda por ver de qué tipo de filtro se trata: vemos primero que no tiene ceros en infinito, pues
Por su parte, en cero vale 1, pero tiene cero en 2 rad/s, por lo tanto, la transferencia se mantiene, luego se redu-ce a cero y luego vuelve a subir, de manera que debe tratarse de un filtro elimina banda o notch, como puede observarse a en la gráfica de las figs. 5.7 y 5.8, donde se ven los diagramas de magnitud y fase de la transferen-cia.
Fig. 5.7
Fig. 5.8
Ejemplo 5.2.2 Un filtro de cuarto orden tiene transmisión cero en 0. 2rad/s e infinito, mientras que sus polos son -0,1±j 0,8 y -0,1±j1,2. Determine la expresión de la transferencia y el tipo de filtro del que se trata. Solución: El cero en 2 rad/s, frecuencia natural, debe estar en el eje imaginario y ser conjugados, de manera que el término correspondiente es , por tratarse de una diferencia de cuadrados, pero con . El cero en cero, pone de relieve que es necesario la existencia de un factor s. Finalmente, realizando las mismas opera-ciones, en virtud de la propiedad de la suma y producto de las raíces de la ecuación de segundo grado, resultan dos polinom El cero en infinito, queda garantizado, ya que el grado deldenominador es mayor que el del numerador, entonces la transferencia quedará
Los diagramas de módulo y fase son los dibujados en las figu-
ras 5.9 y 5.10. El gráfico del módulo, permite observar que se trata de un filtro pasa banda, pues la transferen-cia tiende a cero al principio y al final, es decir en cero y en infinito. El otro cero está en la banda suprimida.
ios
y
Ejercitación: Determine el tipo de transferencia del que se trata y el tipo de filtro al que corresponde.
a)
b)
c)
d)

Fig. 5.9
Fig. 5.10
5.3) Diseño de filtros El proceso de diseño, consiste en la especificación previa de las características y luego, la utilización de gráficos y tablas para su implementación práctica. Los filtros pueden llevarse a la práctica en dos versiones: La forma activa y la forma pasiva, la primera tiene como ventajas:
• Tiene ganancia, dada por los amplificadores operacionales. • Puede ser utilizado en forma modular (circuitos integrados) • Aislamiento entre etapas, al utilizar amplificadores operacionales en configuración de alta impedancia,
entonces, pueden usarse varias etapas en cascada. • Bajo costo, pues pueden implementarse sólo con capacitores
Como desventajas podemos mencionar: • Necesidad de fuente de alimentación, habitualmente doble. • Limitación en el rango de amplitudes, pues se puede llegar a valores que produzcan comportamientos no
lineales. • Limitación en el rango de frecuencias, debido a las limitaciones propias de los amplificadores operacio-
nales. Nuestro estudio estará orientado hacia los filtros activos. Podemos analizar un circuito como el indicado en el cual el AO, estará retroalimentado, de manera que puede analizarse en virtud de las impedancias entre sus nodos. Es decir que para la síntesis de redes activas, puede usarse la configuración dibujada a continuación.
Fig. 5.11
Donde la transferencia (ganancia ) la obtendremos mediante la conocida expresión
, donde las impedancias indicadas, son en general circuitos complejos de dos terminales y se obtienen a partir de tablas como la indicada más aba-jo.
Ejemplo 5.3.1

Se desea sintetizar, mediante una red activa la siguiente transferencia de un filtro pasa bajos: .
Nos auxiliaremos de la tabla 5.1

Viendo el primer cuadro, para el pasa bajo, resulta que a0 = 100 (1/s), ω0 = 20 (1/s). Es decir, que en frecuencia cero, el filtro tendrá una ganancia de 5. Observando la tabla, sacamos las siguientes conclusiones:
/ 5 10 Ω y si, por ejemplo, adoptamos C = 1µF, resulta R2 = 50 kΩ y como y ya tenemos resuelto el problema, observándose a continuación el diagrama de la transferencia deseada.
Fig. 5.12
Fig. 5.13
Si observamos el diagrama de módulo , se está claro que la ganancia para frecuencias bajas, se mantiene prácti-camente estable en un valor de alrededor de 14 dB = 20log5 y que en una década, es decir una variación de fre-cuencia de diez veces, por ejemplo entre ω = 100 y ω = 1000 rad/s, la curva pasa de 0 dB á -20 dB, es decir, que como se indica en la tabla, a través del diagrama asintótico (diagrama de Bode), tiene una caída de 20 dB/década, que es típica de todo sistema de primer orden, es decir con polos de primer orden, mientras que la fase rotará -90°, es decir que producirá un atraso en la señal de salida de 90° Si los polos fueran complejos conjugados, es decir, de segundo orden, entonces tendría -40 dB/déc. En resumen, la pendiente de la ganancia en función de la frecuencia, será 20n dB/déc. 5.3.2) Filtros de Butterworth y Chebyshev Se trata de dos filtros analógicos clásicos que tienen propiedades particulares que los hacen de aplicación muy común. El primero, presenta la característica de tener una transferencia extremadamente plana en la banda de atenuación, de tal forma, que recibe el nombre de filtro de magnitud máximamente plana, mientras que el se-gundo tiene una caída muy abrupta entre la banda de paso y la de atenuación, de manera que la banda de transi-ción es muy pequeña, sin embargo adolece del defecto de introducir ondulación (ripple) en la banda de paso. El módulo de la transferencia de un filtro mediante la aproximación de Butterworth, es
| |1
1
√
, donde N es el orden del filtro, es decir el exponente mayor del denominador de la transferencia. Si tomamos ω = ωp, decimos que el filtro está normalizado y el módulo de la transferencia es
, por ello en forma normalizada se suele escribir la transferencia como
| | Por supuesto, a medida que el orden aumenta, se hace más abrupta la caída de la respuesta y
más complejo el filtro. El filtro de Chebyshev, tiene una gráfica del módulo de la transferencia como la indicada a continuación:

Fig. 5.14
Donde se observa el rizado o ripple y el pará-metro ε, define la amplitud del rizado y es una parámetro del filtro.
5.3.3) Diseño del filtro de Butterworth Como todo diseño, es abierto y hay más variables a definir, que ecuaciones, por lo cual, hay valores que de-berán ser elegidos previamente, por supuesto, con cierto criterio. Aquí, emplearemos el método, en el cual ele-gimos las resistencias o los capacitores y ese valor es constante, es decir, todas las resistencias o todos los capa-citores, tendrán el mismo valor. Usaremos además tablas, en las cuales aparecen los valores normalizados, para frecuencia 1, por lo tanto, habrá que desnormalizarlo con el valor real de frecuencia. Los ejemplos los realiza-remos con la transferencia de Butterworth, pero el método también es válido para la característica de Chebys-hev. Primeramente analizamos la estructura básica de los filtros pasa bajos y pasa altos de primer y segundo orden, ya que a partir de ellos, se pueden construir los de orden superior, mediante agrupamiento de las unidades bási-cas y también pueden construirse las pasa bandas y elimina banda.
Fig. 5.15 (pasa bajos de segundo orden)
Fig. 5.16 (pasa bajos de tercer orden)
Fig. 5.16 (pasa altos de segundo orden)
Fig. 5.17 (pasa altos de tercer orden)
Observemos que las celdas elementales de los filtros dibujados, coinciden con los correspondientes a los homó-logos pasivos y además que arbitrariamente, elegimos resistencias de valor unitario para el pasa bajos y capaci-tancias unitarias para el pasa altos.

Para poder diseñar el filtro debemos contar con especificaciones, de dos puntos, es decir de valores de gananciay frecuencia. Siguiendo con la misma idea del principio del capítulo, deberíamos conocer el valor máximo de lacaía d
e transferencia en la banda de paso y la frecuencia del polo y el valor mínimo admitido para la banda de tenuación y su frecuencia. Por ejemplo, para un filtro pasa bajos, podríamos tener las siguientes especificacio-
nes:
Fig. 5.18
en del filtro y luego definir s expresar el módulo de la
bas condiciones, es decir y
a
Para diseñar el filtro, debemos realizar dos pasos. El primero es encontrar el ordel factor de escala. Podemotransferencia normalizada
La cual, deberá satisfacerse para am
Podemos expresar y Además. En ambos casos, como se trata
de decibeles por debajo del cero, carece de significación el xponente. Si ahora e
resión, miembro a miembro, result o
Si ahora, para abreviar llamamos
nos en el e levamos al
cuadrado en cada , del mismo mod
Siguiendo
.
signo me
a
iltro hacemos;
exp
ar el valor del orden del f
y
con la operatoria para despej
Finalmente , expresión que nos permite obtener el orden del filtro.
Del gráfico de las especificaciones, se observan los datos siguientes: Con estos valorqueda y . Finalmente , por lo tanto de-bemos elegir el entero más cercano por exceso, es decir: N = 3 Se trata entonces, de un filtro de orden 3 pasa bajos, por lo cual tomaremos el circuito de la fig. 5.15, de manera que aceptamos resistencias de valor unitario.Debemos pasar a la segunda etapa del diseño, que es el de encontrar el factor de escala. Los valores normaliza-dos de resistencia del prediseño es 1Ω y la frec 1 rad/s razonables, que sean
es
os . Por lo tanto, obtenemos el nuevo valor de la capacitan-. Luego, entrando en
. Con estos da-tos, fácilmente encontram las capacitancias:
C2 = 0.22 µF C3 = 0.033 µF
uencia de corteR = 1 kΩ
,
. Elegimos valores fáciles de conseguir. Por ejemcia, afectado por la frecuencia y la
la tabla 5.2, con N = 3
plo, adoptam resistencia
, resultan los siguientes valores os los valores de C1 = 0.56 µF
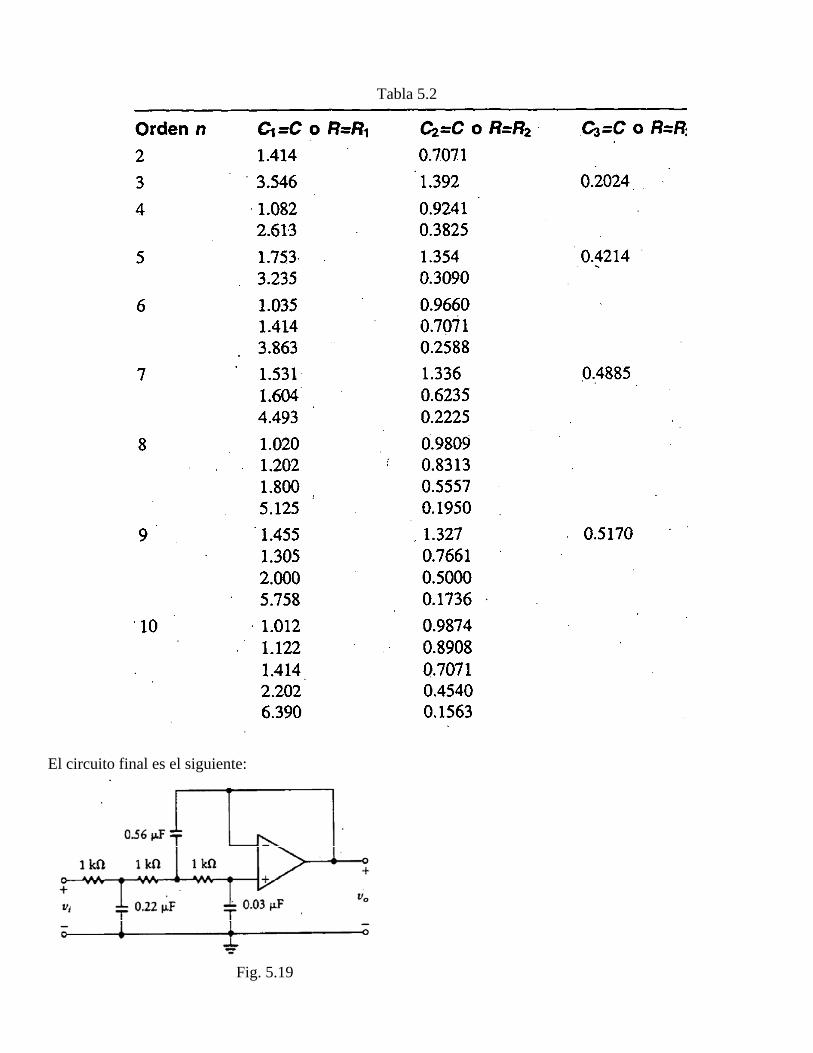
Tabla 5.2
El circuito final es el siguiente:
Fig. 5.19

Finalmente, en el siguiente gráfico se aprecia la respuesta en frecuencia, mediante la simulación realizada en Pspice, donde vemos la planicidad de la respuesta en la banda de paso y lo cercano a los valores propuestos, aún mejor, en el sentido que la caída es más abrupta, ya que se obtiene -40 dB en 4.641 kHz
Podríamos desear agregar cierta ganancia al filtro, para lo cual, bastará disponer de un nuevo amplificador en la configuración no inversora.
Donde se aprecia que está la transferencia 20dB por encima que en el caso anterior.
Frequency
1.0Hz 3.0Hz 10Hz 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz 30KHz 100KHzDB(V(R4:2))
-150
50
-100
-50
-0
(992.199,-3.0318)
(4.6416K,-40.091)
Frequency
1.0Hz 3.0Hz 10Hz 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz 30KHz 100KHzDB(V(U2:OUT))
-120
-80
-40
-0
40
(4.6416K,-20.091)
(984.458,17.070)
U1
OPAMP
+
-
OUTR1
1k
R2
1k
R3
1k
C10.56uF
C20.22uF
C30.033uF
0 0
0
U2
OPAMP
+
OUTV1
1Vac0Vdc
0
-R410k
R5
9kR61k
V
0
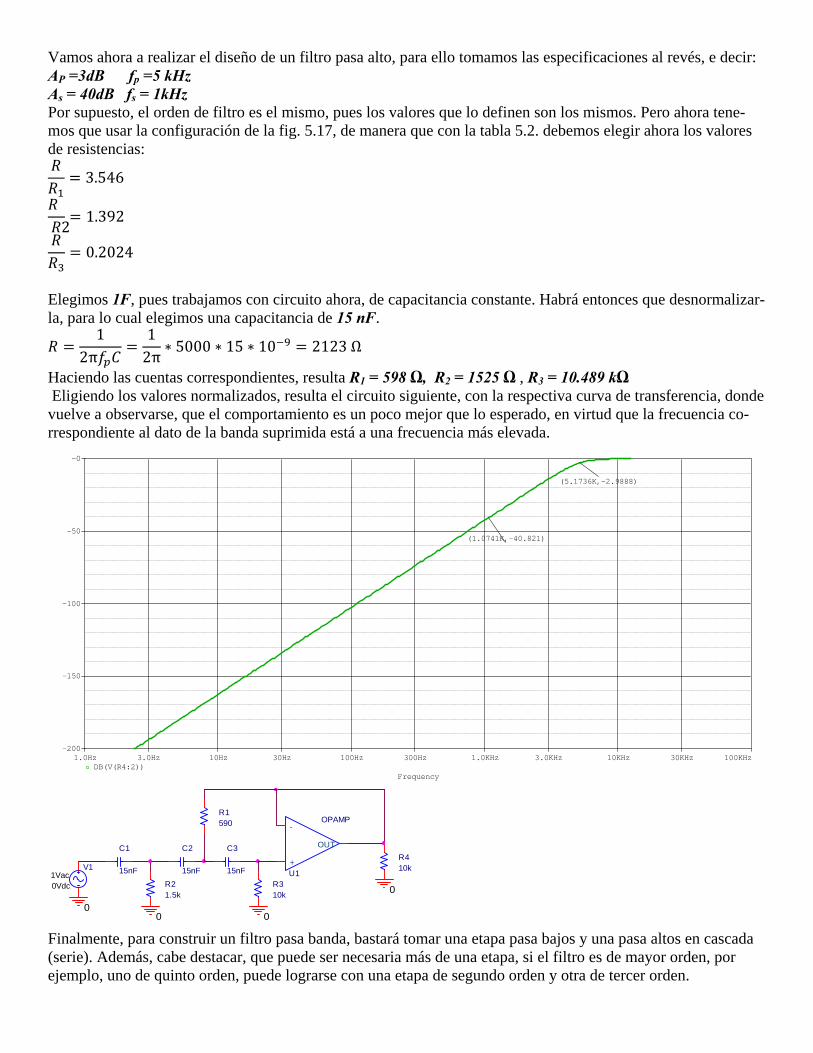
Vamos ahora a realizar el diseño de un filtro pasa alto, para ello tomamos las especificaciones al revés, e decir: AP =3dB fp =5 kHz As = 40dB fs = 1kHz Por supuesto, el orden de filtro es el mismo, pues los valores que lo definen son los mismos. Pero ahora tene-mos que usar la configuración de la fig. 5.17, de manera que con la tabla 5.2. debemos elegir ahora los valores de resistencias:
3.546
1.392 2
0.2024
Elegimos 1F, pues trabajamos con circuito ahora, de capacitancia constante. Habrá entonces que desnormalizar-la, para lo cual elegimos una capacitancia de 15 nF.
12π
12π 5000 15 10 2123 Ω
Haciendo las cuentas correspondientes, resulta R1 = 598 Ω, R2 = 1525 Ω , R3 = 10.489 kΩ Eligiendo los valores normalizados, resulta el circuito siguiente, con la respectiva curva de transferencia, donde vuelve a observarse, que el comportamiento es un poco mejor que lo esperado, en virtud que la frecuencia co-rrespondiente al dato de la banda suprimida está a una frecuencia más elevada.
da que puede ser necesaria más de una etapa, si el filtro es de mayor orden, por
ejemplo, uno de quinto orden, puede lograrse con una etapa de segundo orden y otra de tercer orden.
Frequency
1.0Hz 3.0Hz 10Hz 30Hz 100Hz 300Hz 1.0KHz 3.0KHz 10KHz 30KHz 100KHzDB(V(R4:2))
-200
-150
-100
-50
-0
(1.0741K,-40.821)
(5.1736K,-2.9888)
U1
OPAMP
+
-
OUT
R1590
Finalmente, para construir un filtro pasa banda, bastará tomar una etapa pasa bajos y una pasa altos en casca(serie). Además, cabe destacar,
R21.5k
R310k
C1
15nF
C2
15nF
C3
15nFR410kV1
1Vac0Vdc
0
0
00
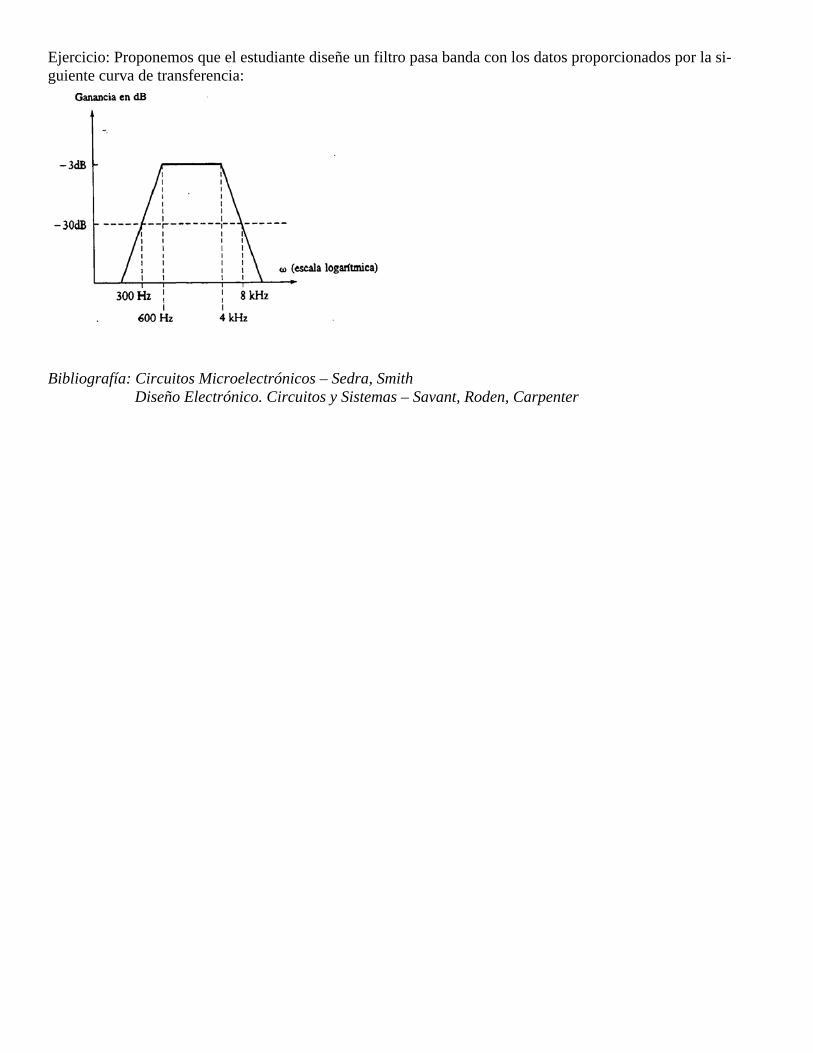
Ejercicio: Proponemos que el estudiante diseñe un filtro pasa banda con los datos proporcionados por la si-guiente curva de transferencia:
ibliografía: Circuitos Microelectrónicos – Sedra, Smith Diseño Electrónico. Circuitos y Sistemas – Savant, Roden, Carpenter
B