C U R R I C U L U M V I T A E - 2 0 1...
24
Dr. José Emilio Vargas Soto, [email protected] CURRICULUM VITAE- 2018 1. DATOS PERSONALES. Nombre: José Emilio Vargas Soto Trabajo actual Profesor-Investigador. Facultad de Ingeniería. Universidad Autónoma de Querétaro Dirección e-mail: [email protected] Página electrónica: http://www.mecatronica.net/emilio Lugar de nacimiento: México D.F. Fecha de nacimiento: Febrero 9 de 1964. Nacionalidad: Mexicana. CURP: VASE640209HDFRTM08. No. IMSS: 39946407689 011643. SNI-CONACYT Investigador Nacional Nivel 1, área: Ingeniería, PRODEP-SEP Vigente. 2. FORMACIÓN. Postdoctorado Lugar: The Electrocommunication University of Tokyo. Graduate School of Information Systems. 5-1, 1-Chome, Chofugaoka, Chofu 182. Tokyo. Japón. Fecha: From Octubre, 1995 to April, 1997. Investigación: Free locomotion gaits for a quadruped walking robot, and a telepresence system for a remote crane machine. Doctorado Lugar: Universidad Complutense de Madrid. Facultad de Ciencias Físicas. Departamento de Informática y Automática. Ciudad Universitaria. 28040 Madrid. España Diploma: Doctor en Ciencias Físicas. Área: Informática y Automática. Duración: Noviembre, 1991 a Abril, 1994. Tesis: Realización y Diseño de Algoritmos de Locomoción Libre para Robots Caminantes de Cuatro Patas. Maestría Lugar: Universidad Politécnica de Madrid. Escuela de Informática. Km. 7, N-III. 28031 Madrid. Spain. Diploma: Maestro en Tecnologías de la Información en Fabricación. Área: Ingeniería de Control. Duración: Enero,1991 a Febrero, 1992. Tesis: Simulador Grafico para un Sistema de Telepresencia de un Robot de Cuatro Patas. Especialización en Computadoras en la Industria. Lugar: Consejo Superior de Investigaciones Científica. Instituto de Automática Industrial. Desvío Km. 22,800. N-III. La Poveda. 28500 Madrid.España. Duración: Octubre,1990 a Julio 1992. Especialización en Mechanical Design of Industrial Robots. Lugar: Mechanical Engineering Laboratory. Mechanisms Division. Robotics Departament. Tsukuba Science City. Namiki 1-2, Ibaraki 305.Japón. Duración: Marzo, 1989 a Enero, 1990. Profesional. Lugar: Universidad Nacional Autónoma de México. Facultad de Ingeniería. Duración: (1983-1987). Diploma: Licenciado en Ingeniería Mecánica y Eléctrica, área: Diseño Mecánico. Promedio: 9.1 de 10. Tesis: Diseño de una Máquina Automática de Inyección de Plástico de Tipo Económica Fecha: 29 de Julio de 1988. Otros idiomas: Inglés (80 % hablado y escrito). Japonés (60 % hablado y 40 % escrito).
Transcript of C U R R I C U L U M V I T A E - 2 0 1...
Dr. José Emilio Vargas Soto, [email protected]
C U R R I C U L U M V I T A E - 2 0 1 8 1. DATOS PERSONALES.
Nombre: José Emilio Vargas Soto Trabajo actual Profesor-Investigador.
Facultad de Ingeniería. Universidad Autónoma de Querétaro
Dirección e-mail: [email protected] Página electrónica: http://www.mecatronica.net/emilio Lugar de nacimiento: México D.F. Fecha de nacimiento: Febrero 9 de 1964. Nacionalidad: Mexicana. CURP: VASE640209HDFRTM08. No. IMSS: 39946407689 011643. SNI-CONACYT Investigador Nacional Nivel 1, área: Ingeniería, PRODEP-SEP Vigente.
2. FORMACIÓN. Postdoctorado Lugar: The Electrocommunication University of Tokyo.
Graduate School of Information Systems. 5-1, 1-Chome, Chofugaoka, Chofu 182. Tokyo. Japón.
Fecha: From Octubre, 1995 to April, 1997. Investigación: Free locomotion gaits for a quadruped walking robot, and a telepresence system for a remote crane machine.
Doctorado Lugar: Universidad Complutense de Madrid. Facultad de Ciencias Físicas.
Departamento de Informática y Automática. Ciudad Universitaria. 28040 Madrid. España Diploma: Doctor en Ciencias Físicas. Área: Informática y Automática. Duración: Noviembre, 1991 a Abril, 1994. Tesis: Realización y Diseño de Algoritmos de Locomoción Libre para Robots Caminantes de Cuatro Patas. Maestría Lugar: Universidad Politécnica de Madrid. Escuela de Informática.
Km. 7, N-III. 28031 Madrid. Spain. Diploma: Maestro en Tecnologías de la Información en Fabricación. Área: Ingeniería de Control. Duración: Enero,1991 a Febrero, 1992. Tesis: Simulador Grafico para un Sistema de Telepresencia de un Robot de Cuatro Patas. Especialización en Computadoras en la Industria. Lugar: Consejo Superior de Investigaciones Científica.
Instituto de Automática Industrial. Desvío Km. 22,800. N-III. La Poveda. 28500 Madrid.España.
Duración: Octubre,1990 a Julio 1992. Especialización en Mechanical Design of Industrial Robots. Lugar: Mechanical Engineering Laboratory.
Mechanisms Division. Robotics Departament. Tsukuba Science City. Namiki 1-2, Ibaraki 305.Japón.
Duración: Marzo, 1989 a Enero, 1990. Profesional. Lugar: Universidad Nacional Autónoma de México. Facultad de Ingeniería. Duración: (1983-1987). Diploma: Licenciado en Ingeniería Mecánica y Eléctrica, área: Diseño Mecánico. Promedio: 9.1 de 10. Tesis: Diseño de una Máquina Automática de Inyección de Plástico de Tipo Económica Fecha: 29 de Julio de 1988. Otros idiomas: Inglés (80 % hablado y escrito).
Japonés (60 % hablado y 40 % escrito).

Dr. José Emilio Vargas Soto, [email protected]
3. EXPERIENCIA EN ÁREAS DE ESPECIALIZACIÓN. Área: Manufactura de Piezas de Plástico. Años: 9 Años.
Lugar: Taller de Maquila de Plástico.
Área: Control Automático, mecatrónica, robótica, diseño de máquinas. Años: 20 Años.
Lugares: Taller de Maquila de Plástico. Centro de Instrumentos.
Instituto de Automática Industrial. ITESM Campus Querétaro.
Centro de Ingeniería y Desarrollo Industrial Integración Tecnológica Avanzada Mechatronics Unlimited S.A. de C.V. Tecnología Especializada en el Medio Ambiente S.A. de C.V. Universidad Anáhuac México Sur
4. EXPERIENCIA EN INSTITUCIONES EDUCATIVAS Y DE INVESTIGACIÓN. Profesor de Tiempo Completo. Universidad Autónoma de Querétaro Facultad de Ingeniería (2015 a la fecha). Cursos: Física clásica. Biomecánica. Seminario de tesis. Sistemas no lineales (posgrado). Modelación y simulación (posgrado). Facultad de Informática. (2010 a 2015) Cursos: Series y Transformadas de Fourier
Programación II. Programación III. Interconectividad de Dispositivos. Inteligencia Artificial (Maestría). Dinámica de Sistemas (Maestría).
Profesor de Posgrado. DEPFI-UNAM (1994-1995). Cursos: Introducción a la Robótica.
Dinámica. Temas Especiales de Ingeniería Mecánica.
Automatización Industrial.
UNIVERSIDAD ANAHUAC DEL SUR. FACULTAD DE INGENIERIA (1994-1995). Cursos: Teoría de Manufactura Avanzada (CAD/CAM).
Manufactura Avanzada (CIM). Diseño y Construcción de Prototipos.
CENTRO DE INGENIERIA Y DESARROLLO INDUSTRIAL. POSGRADO INTERINSTITUCIONAL EN CIENCIA Y TECNOLOGÍA (1999 – 2005). Cursos: Gestión de la Tecnología.
Instrumentación Industrial. Introducción a la Mecatrónica. Modelación y Simulación.
UNIVERSIDAD INDUSTRIAL DE SANTANDER. FACULTA DE INGENIERIA. Bucaramanga, Colombia. (Junio 12-15, 2003). Curso: Diseño de Sistemas Mecatrónicos. Profesor de Licenciatura. UNIVERSIDAD ANAHUAC MÉXICO SUR. FACULTAD DE INGENIERIA (1994-1995). Cursos: Automatización Industrial. Robótica. Diseño de Elementos de Máquinas. Control de Calidad (Norma ISO-9000). Administración de la Tecnología.
Dr. José Emilio Vargas Soto, [email protected]
INSTITUTO TECNOLOGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS QUERETARO. DEPARTAMENTO DE INGENIERÍA MECÁNICA E INDUSTRIAL (1997-2002). Cursos: Robotic Systems (curso internacional de verano).
Laboratorio de Sistemas de Control Automático. Dinámica de Maquinaria. Mecanismos. Sistemas de Control Automático. Mecatrónica. Sistemas de Control 1. Sistemas de Control 2.
Administración de Tecnología. Sistemas de Producción
UNIVERSIDAD DEL VALLE DE MÉXICO - CAMPUS QUERETARO. DEPARTAMENTO DE TECNOCIENCIAS (2003-2004). Cursos: Manufactura Avanzada. Instrumentación y Control.
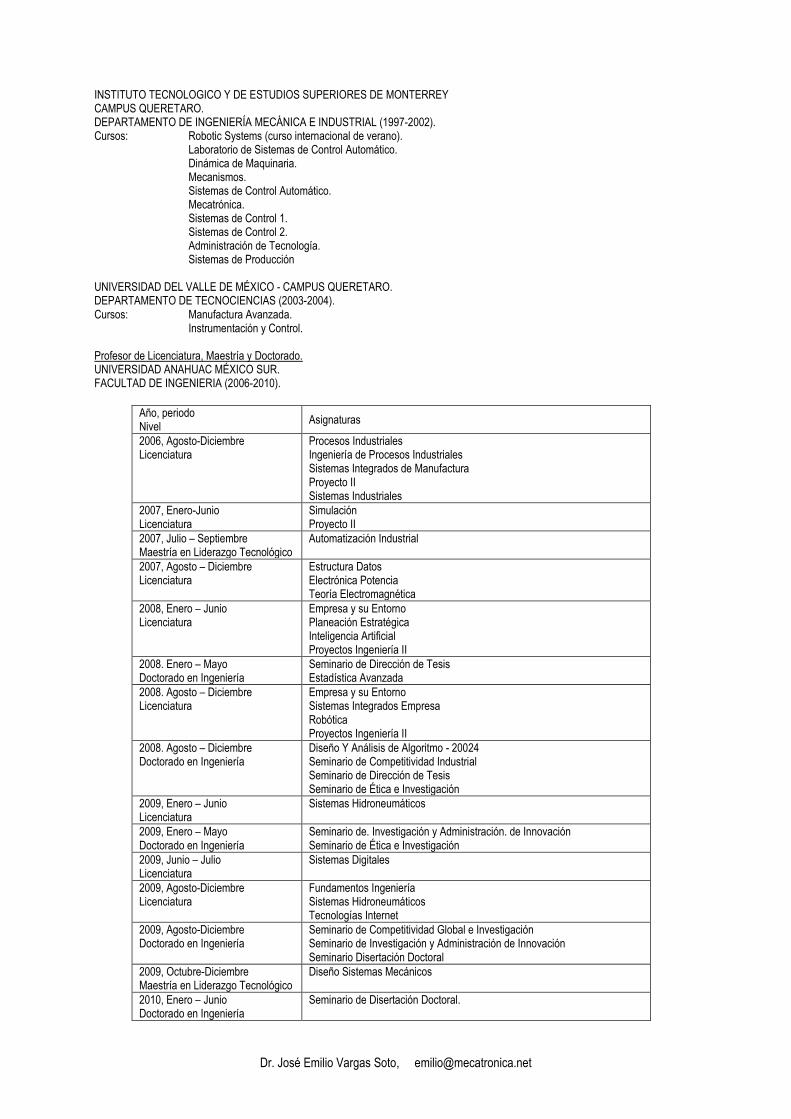
Profesor de Licenciatura, Maestría y Doctorado. UNIVERSIDAD ANAHUAC MÉXICO SUR. FACULTAD DE INGENIERIA (2006-2010).
Año, periodo Nivel
Asignaturas
2006, Agosto-Diciembre Licenciatura
Procesos Industriales Ingeniería de Procesos Industriales Sistemas Integrados de Manufactura Proyecto II Sistemas Industriales
2007, Enero-Junio Licenciatura
Simulación Proyecto II
2007, Julio – Septiembre Maestría en Liderazgo Tecnológico
Automatización Industrial
2007, Agosto – Diciembre Licenciatura
Estructura Datos Electrónica Potencia Teoría Electromagnética
2008, Enero – Junio Licenciatura
Empresa y su Entorno Planeación Estratégica Inteligencia Artificial Proyectos Ingeniería II
2008. Enero – Mayo Doctorado en Ingeniería
Seminario de Dirección de Tesis Estadística Avanzada
2008. Agosto – Diciembre Licenciatura
Empresa y su Entorno Sistemas Integrados Empresa Robótica Proyectos Ingeniería II
2008. Agosto – Diciembre Doctorado en Ingeniería
Diseño Y Análisis de Algoritmo - 20024 Seminario de Competitividad Industrial Seminario de Dirección de Tesis Seminario de Ética e Investigación
2009, Enero – Junio Licenciatura
Sistemas Hidroneumáticos
2009, Enero – Mayo Doctorado en Ingeniería
Seminario de. Investigación y Administración. de Innovación Seminario de Ética e Investigación
2009, Junio – Julio Licenciatura
Sistemas Digitales
2009, Agosto-Diciembre Licenciatura
Fundamentos Ingeniería Sistemas Hidroneumáticos Tecnologías Internet
2009, Agosto-Diciembre Doctorado en Ingeniería
Seminario de Competitividad Global e Investigación Seminario de Investigación y Administración de Innovación Seminario Disertación Doctoral
2009, Octubre-Diciembre Maestría en Liderazgo Tecnológico
Diseño Sistemas Mecánicos
2010, Enero – Junio Doctorado en Ingeniería
Seminario de Disertación Doctoral.

Dr. José Emilio Vargas Soto, [email protected]
Otros cursos impartidos: 4th International Symposium on Robotics and Automation, ISRA 2004. Curso Tutorial: INTRODUCTION TO INDUSTRIAL MECHATRONICS. Agosto 25-27, 2004. Querétaro, México. XI Congreso Nacional de Estudiantes de Ingeniería Mecánica, Eléctrica, Electrónica y Ramas Afines ,CONEIMERA 2004. CURSO TUTORIAL: DISEÑO DE MAQUINAS MECATRONICAS INDUSTRIALES. Octubre 4-9 , 2004. Piura, Perú. Curso de Robótica para Niños. Universidad del Valle de México-Asociación Mexicana de Mecatrónica A.C. Julio 19-23, 2004, Querétaro, México. UNIVERSIDAD NACIONAL AUTONOMA DE MÉXICO. CENTRO DE INSTRUMENTOS. Técnico Académico Auxiliar "C", Tiempo Completo.
De Agosto 1, 1987 a Julio 31, 1988. Técnico Académico Asociado "A", Tiempo Completo.
De Agosto 1, 1987 a Julio 31, 1989. Técnico Académico Asociado "B", Tiempo Completo. De Octubre 15, 1989 a Septiembre 31, 1990. Investigador Asociado "C", Tiempo Completo. De Junio de 1994 a Noviembre de 1994. UNIVERSIDAD ANAHUAC DEL SUR. FACULTAD DE INGENIERIA. Profesor - Investigador de Tiempo Completo. Jefe del Laboratorio de Automatización. De Noviembre de 1994 a Septiembre de 1995. INSTITUTO TECNOLOGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY. CAMPUS QUERETARO. DEPARTAMENTO DE INGENIERÍA MECÁNICA E INDUSTRIAL. Profesor - Investigador de Planta de Tiempo Completo. Jefe del Laboratorio de Automatización. De Abril de 1997 al 27 de Enero del 2002. Coordinador del Centro Metropolitano de Investigación en Mecatrónica. De Julio del 2001 a Enero del 2002. Director del Proyecto: “Final Machining of Robotized Cell”. ITESM Querétaro- Universidad Tecnológica de Budapest. 1998-2001. CENTRO DE INVESTIGACION Y ASISTENCIA TECNICA EL ESTADO DE QUERETARO, CIATEQ. A.C. Investigador –Titular por obra determinada: Diseño de un Laboratorio de Mecatrónica.
Área de Investigación. De Agosto 4 de 1997 a Mayo de 1998. POSGRADO INTERINSTITUCIONAL EN CIENCIA Y TECNOLOGÍA,(CIDESI). Profesor de asignatura a partir de Mayo de 1999., Investigador Titular “C” de tiempo completo. Desde Enero 27 del 2002 al 5 de Agosto del 2005. Jefe del Laboratorio de Mecatrónica de la Unidad de Posgrado e Investigación. 5. REALIZACIÓN DE PROYECTOS I+D. Líder en Proyectos: Proyecto: Desarrollo de Algoritmos Inteligentes para la Locomoción Dinámica en Robots Caminantes. Lugar: Universidad Autónoma de Querétaro. Facultad de Informática. Proyecto de investigación financiado por PROMEP. Año: 2011 a 2012. Proyecto: Extinción de Incendios Asistida por Robots. Lugar: Universidad Anáhuac México Sur. Facultad de Ingeniería. Proyecto interno de investigación. Año: 2008 – 2009. Proyecto: Developing a Six Legged Walking Robot. Lugar: Centro de Ingeniería y Desarrollo Industrial, Querétaro, México. Proyecto interno de investigación. Año: 2003 – 2005.

Dr. José Emilio Vargas Soto, [email protected]
Proyecto: Developing a Pneumatic Flexible Manipulator to Industrial Cleanning Taskes. Lugar: Centro de Ingeniería y Desarrollo Industrial, Querétaro, México. Proyecto interno de investigación. Año: 2003 – 2005. Proyecto: Dispositivo remoto de encendido y apagado de relevadores. Lugar: Querétaro, México. Cliente: Equipos de Automatización y Bombeo S.A. de C.V. Año: 2002-2002. Proyecto: Diseño de un electro-estimulador para tratamiento de carne de Venado. Lugar: Querétaro, México. Cliente: Procesadora de Carne Wapiti S.A. de C.V. Año: 2001-2001. Proyecto: “Final Machining of Robotized Cell”. Lugar: ITESM Campus Querétaro. Proyecto internacional de investigación: ITESM Querétaro- Universidad Tecnológica de Budapest. Año: 1998-2001. Proyecto: Free Locomotion Algorithms For Four Legged Robots. Lugar: The Electrocommunication University of Tokyo, Tokyo, Japan. Proyecto interno de investigación. Año: 1996-1997. Proyecto: "Automatización de la Planta No. 1 de Cifunsa S.A." (Evaluación y Primera Fase de Automatización) Lugar: Universidad Anahuac del Sur. Cliente: CIFUNSA S.A. de C.V. Año: 1995-1995. Proyecto: Automatización de una Máquina Inyectora de Plástico de Tipo Económica. Lugar: Taller de Maquila de Plástico S.A. de C.V. Cd. de México. Año: 1987-1988. Colaborador en proyectos: Proyecto: Máquina Insertadora de Separador. No. 40936. Líder del proyecto: Ing. Wilfrido Rodríguez Moreno. Lugar: Centro de Ingeniería y Desarrollo Industrial, Querétaro, México. Cliente: MISSION HILLS S.A. de C.V. Año: 2003-2004.
Proyecto: Diseño de un Robot Orientado a Inspección por Ultrasonido. Líder: Ing. Julio Solano Vargas. Lugar: Centro de Ingeniería y Desarrollo Industrial, Querétaro, México. Cliente: LAPEM-CFE. Año: 2001-2002.
Proyecto: Diseño de un Mecanismo de Apoyo y Tracción en Ruedas (TRACMINER). Líder: Dr. Manuel Armada M. Lugar: Instituto de Automática Industrial, CSIC. España. Año: 1990-1994.
Proyecto: Intelligent Robotic Welding System for Unique Fabrications. Proyecto de Investigación de la Comunidad Económica Europea. Proyecto Espirit III, European Comunity Research Project No. 6042 Hephaestos 2. Líder: Dr. Manuel Armada. Lugar: Instituto de Automática Industrial, CISC. España. Año: 1992. Proyecto: Simulador y Sistema de Control para un Robot Manipulador. Líder: Dr. Manuel Armada. Lugar: Instituto de Automática Industrial, CSIC. España. Año: 1991. Proyecto: Desarrollo de un Robot Caminante de Cuatro Patas. Líder: Dr. Manuel Armada. Lugar: Instituto de Automática Industrial, CSIC. España. Año: 1990.

Dr. José Emilio Vargas Soto, [email protected]
Proyecto: Equipo para la Obtención de Cintas Metálicas Amorfas. Líder: M.C. Vicente Rivera V. Lugar: Centro de Instrumentos, Instituto de Materiales, UNAM. México. Año: 1987. Proyecto: Compresor Rotatorio de Desplazamiento Positivo. Líder: Dr. Ricardo Chicurel R. Lugar: Centro de Instrumentos, Instituto de Ingeniería, UNAM. México. Año: 1987. Proyecto: Diseño y Construcción de un Viscosímetro Giratorio Líder: Ing. Roberto Reséndiz Núñez. Lugar: Centro de Instrumentos, UNAM. México. Año: 1987.
6. FORMACIÓN DE PERSONAL. Dirección de seminarios: Seminario: Diseño de un Robot Manipulador de Tres Grados de Libertad. Alumno: David Vázquez Razo. Nivel: Licenciatura. Ingeniería Mecánica. Lugar: Facultad de Ingeniería, UNAM. 1988. Participación en seminarios, coloquios, etc.:
10° Coloquio de Postgrado. Facultad de Ingeniería, Universidad Autónoma de Querétaro. Conferencia magistral: Tecnología e Innovación. Noviembre 24, 2016.
Seminario de posgrado. Instituto Tecnológico de Morelia, Departamento de Metalmecánica. Diciembre 15, 2004. 3er. Seminario de Investigación CIDESI-Institutos Tecnológicos. Instituto Tecnológico de León. Septiembre 4-5, 2003.
X Seminario de Alumnos de Postgrado (88-II). Facultad de Ingeniería, DEPFI-UNAM. Sección: Mecánica. Agosto de 1988. Dirección de Tesis de Posgrado: Titulo: Optimización del Proceso de Elaboración de Recubrimientos Arquitectónicos Estudiante: Pablo Aragón Candelaria. Nivel: Doctorado, concluida. Lugar: Universidad Anáhuac México Sur. Facultad de Ingeniería.
Titulo: Diseño de Algoritmos de Control para un Manipulador neumático-flexible. Estudiante: Juan Manuel Ramos Arreguín. Nivel: Doctorado. concluida en Febrero 5, 2008 Lugar: Centro de Ingeniería y Desarrollo Industrial, UTSJR. Titulo: Modelado de Robot Manipulador Flexible. Estudiante: Fernando Francisco Kiyama Miramontes. Nivel: Doctorado, concluida en Agosto del 2005 Lugar: Centro de Ingeniería y Desarrollo Industrial. Titulo: Algoritmos de Locomoción Libre para un Robot de Seis Patas. Estudiante: Efrén Gorrostieta Hurtado. Nivel: Doctorado, concluida en Marzo del 2004. Lugar: Centro de Ingeniería y Desarrollo Industrial. Título: Aplicación del Control Neurodifuso a un Sistema de Manufactura Flexible. Estudiante: Carlos Gracios Marón. Nivel: Doctorado. concluida. Lugar: Centro de Ingeniería y Desarrollo Industrial.

Dr. José Emilio Vargas Soto, [email protected]
Titulo: Análisis y Solución del Problema de Fallas en Ventiladores de Tiro Inducido Tipo Radial en Centrales de Generación Eléctrica.
Estudiante: Ángel Fernando Martínez Bravo. Nivel: Maestría, concluida en Septiembre del 2004. Lugar: Centro de Ingeniería y Desarrollo Industrial, LAPEM.
Titulo: Diseño y Manufactura del Cuerpo de un Robot Caminante de Seis Patas. Estudiante: Omar Augusto Sánchez Ortiz. Nivel: Maestría. concluida en Enero del 2006. Lugar: Instituto Tecnológico de Morelia.
Titulo: Diseño y Manufactura de una Pata para un Robot Hexápodo de Tipo Industrial. Estudiante: Mario Héctor Reyes García. Nivel: Maestría. concluida en Enero del 2006 Lugar: Instituto Tecnológico de Morelia.
Titulo: Diseño de un Robot Flexible de 2 grados de Libertad. Estudiante: Juan Manuel Hernández Durán. Nivel: Maestría. concluida en Enero del 2006 Lugar: Instituto Tecnológico de Morelia.
Titulo: Desarrollo de una Maquina Insertadora de Separador. Estudiante: Wilfrido Rodríguez Moreno. Nivel: Maestría. concluida en Mayo 31, 2008. Lugar: Centro de Ingeniería y Desarrollo Industrial. Titulo: Algoritmos de Trayectorias Predictivas para un Robot Manipulador. Estudiante: Jorge Alberto Soto Cajiga. Nivel: Maestría. concluida en Septiembre 29, 2006 Lugar: Centro de Ingeniería y Desarrollo Industrial. Coasesor de Tesis de Posgrado: Titulo: Modelado de Cadenas Cinemáticas Cerradas Utilizando Cuaterniones. Estudiante: M. en Ing. Mario Márquez Miranda. Nivel: Doctorado en Ciencia de la Ingeniería. Concluido. Lugar: Universidad Anáhuac del Sur. Facultad de Ingeniería. Titulo: Modelado de Cadenas Cinemáticas Abiertas Utilizando Cuaterniones. Estudiante: M. en Ing. Mauricio Cirilo Méndez Canseco. Nivel: Doctorado en Ciencia de la Ingeniería. Concluido. Lugar: Universidad Anáhuac del Sur. Titulo: Controlador de Cadenas Cinemáticas Modeladas con Cuaterniones. Estudiante: M. en C. Irma Salinas López. Nivel: Doctorado en Ciencia de la Ingeniería. Concluido. Lugar: Universidad Anáhuac del Sur. Titulo: Sistema de Seguridad para la Conducción de un Robot Móvil Teleoperado Mediante Datos de Profundidad. Estudiante: M. en C. Mayra P. Garduño Gaffare. Nivel: Doctorado en Ciencia de la Computación. Concluida. Lugar: Instituto Tecnológico de Toluca.
Titulo: Relocalización de un Robot Móvil Utilizando Marcas Artificiales. Estudiante: M. en C. Armida González Lorence. Nivel: Doctorado en Ciencia de la Computación. Concluida. Lugar: Instituto Tecnológico de Toluca. Titulo: Desarrollo de un Robot para Inspección de Espesores de Pared en Tanques de Almacenamiento. Estudiante: Julio César Solano Vargas. Nivel: Maestría. Concluida. Lugar: Centro de Ingeniería y Desarrollo Industrial.
Titulo: Diseño y Manufactura de un Robot Móvil para Medición de Espesores de Tanques Ferromagnéticos por Ultrasonidos.
Estudiante: Antonio Ramírez Martínez. Nivel: Maestría. Concluida. Lugar: Centro de Ingeniería y Desarrollo Industrial.

Dr. José Emilio Vargas Soto, [email protected]
Titulo: Modelado Neurodifuso de un Combustor Ciclónico. Estudiante: Efrén Gorrostieta Hurtado. Nivel: Maestría. Concluida. Lugar: Centro de Investigación y Asistencia Técnica del Estado de Querétaro. Director de Tesis de Licenciatura: Titulo: Diseño y construcción de un robot móvil todo terreno instrumentado para la inspección de incendios.
Estudiante: Espinoza Camargo Juan Manuel, Guadarrama García Víctor Hugo, Hernández Cervantes Rafael y Madrigal Carrasco Octavio.
Lugar: Instituto Politécnico Nacional. Unidad Interdisciplinaria en Ingeniería y Tecnologías Avanzadas (IPN-UPIITA) Concluida, 22 de Junio, 2009. Titulo: Informe sobre la demostración de experiencia profesional. Estudiante: José Guillermo Rodríguez Shutz. Lugar: Universidad Anáhuac del Sur. Concluida, 2007. Titulo Diseño Mecatrónico de la Pata de un Robot Caminante. Estudiante: Rogelio Becerra Moreno. Lugar: Instituto Tecnológico de Cd. Juárez. Concluida, 2003. Co-director de tesis de licenciatura: Titulo: Vehículo Explorador de Configuración Mecánica Flexible. Estudiante: David Alfredo Ortiz Sánchez Navarro. Lugar: Universidad Anáhuac del Sur. Concluida, 2008. Asesor académico de prácticas profesionales: Titulo: Prototipo de Robot con Desplazamiento Propio y Control Remoto. Estudiante: José Alfredo Chisco Parra y Francisco González Padilla. Lugar: Universidad Tecnológica Tula Tepeji. Concluida, 2007. Titulo: Construcción de un Prototipo para la Creación de Estribos. Estudiante: Ninibeth Rivas Monroy y Rodrigo Nilton Maldonado Sandoval. Lugar: Universidad Tecnológica Tula Tepeji.Concluida, 2007. Titulo: Prototipo. Fabricación de Anillos de Varilla (estribos) para la Construcción. Estudiante: José Fernando Martínez Ramos, Camilo Martínez Vargas, Iván Jozael Serrano López y Oscar Rodríguez Alvarez. Lugar: Universidad Tecnológica Tula Tepeji. Concluida, 2007. Titulo: Diseño de Control de una Máquina Dobladora de Varilla. Estudiante: Pascual Quevedo Gallegos y Rogelio Penca Demha. Lugar: Universidad Tecnológica Tula Tepeji. Concluida, 2006. 7. TRABAJOS DE DIVULGACION Y PUBLICACIONES. Libros:
1. Robótica y Mecatrónica de Servicios: Teoría y Aplicaciones, Eduardo Castillo Castañeda, Paola Andrea Niño Suárez, Eduardo Morales Sánchez, José Emilio Vargas Soto y Juan Manuel Ramos Arreguín, Asociación Mexicana de Mecatrónica A.C. ISBN 978-607-9394-06-6, México 2016.
2. Ingeniería Mecatrónica en México, 2016, Juan Manuel Ramos Arreguín, José Emilio Vargas Soto y Saúl Tovar Arriaga, Asociación Mexicana de Mecatrónica A.C., ISBN: 978-607-9394-07-3, México 2016.
3. Sistemas Embebidos. Aplicaciones y Tendencias, Aceves Fernández, Marco Antonio, Ramos Arreguín Juan Manuel y Vargas Soto José Emilio, Asociación Mexicana de Mecatrónica A.C., ISBN: 978-607-9394-05-9, México 2016.
4. Desarrollo de Software y Hardware en Mecatrónica, Juan Manuel Ramos Arreguín, José Emilio Vargas Soto, Marco Antonio Aceves Fernández, Jesús Carlos Pedraza Ortega y Efrén Gorrostieta Hurtado, Asociación Mexicana de Mecatrónica A.C., ISBN: 978-607-9394-04-2, México 2015.
5. Sistemas Embebidos. Usos y Aplicaciones, Marco Antonio Aceves Fernández, Juan Manuel Ramos Arreguín y José Emilio Vargas Soto, Asociación Mexicana de Mecatrónica A.C., ISBN: 978-607-9394-02-8, México 2014.
6. Ingeniería Mecatrónica, Proyectos y Aplicaciones, Juan Manuel Ramos Arreguín, José Emilio Vargas Soto y Jesús Carlos Pedraza Ortega, Editorial: Asociación Mexicana de Mecatrónica A.C., 1° edición, ISBN: 978-607-9394-00-4, México, Octubre 2014.
7. Memorias del VIII Congreso Internacional de Ingeniería Mecánica y Mecatrónica, José Emilio Vargas Soto, Editorial: Asociación Mexicana de Mecatrónica A.C - Grupoloc., 1° edición, Formato: digital - pdf, 42 págs. Tiraje: 1,000, Idioma: Español, País: México, ISBN: 978-607-95347-9-0, Abril 2014.

Dr. José Emilio Vargas Soto, [email protected]
8. Mecatrónica: Control y Automatización: Fernando Reyes, Jaime Cid y Emilio Vargas, Editorial: ALFAOMEGA GRUPO EDITOR, ISBN: 9786077075486, 2013.
9. Memorias del 12° Congreso Nacional de Mecatrónica, José Emilio Vargas Soto y Juan Manuel Ramos Arreguín, Editorial: Asociación Mexicana de Mecatrónica A.C., 1° edición, formato: CD, 219 págs., tiraje: 1000, Idioma: Español, País: México, ISBN: 978-607-95347-8-3, Octubre 6, 2013.
10. Memorias del 11° Congreso Nacional de Mecatrónica, José Emilio Vargas Soto, Editorial: Asociación Mexicana de Mecatrónica A.C., 1° edición, ISBN: 978-607-95347-7-6, México 2012.
11. Jugando Mecatrónica / Playing Mechatronics, Emilio Vargas y Jorge Orozco, Editorial; Asociación Mexicana de Mecatrónica A.C., 1° Edición, formato: papel, 150 págs., tiraje: 200, Idioma: Inglés y Español, País: México, ISBN: 978-607-95347-3-8, 2011.
12. Memorias del 10° Congreso Nacional de Mecatrónica, José Emilio Vargas Soto, Editorial: Asociación Mexicana de Mecatrónica A.C. – Instituto Tecnológico Superior de Puerto Vallarta, ISNB: 978-607-95347-5-2, año 2011.
13. Memorias del 8° Congreso Nacional de Mecatrónica, José Emilio Vargas Soto, Editorial: Asociación Mexicana de Mecatrónica A.C. – Instituto Tecnológico de Veracruz, ISNB: 978-607-95347-0-7, año 2009.
14. Memorias del 6° Congreso Nacional de Mecatrónica, José Emilio Vargas Soto, Editorial: Asociación Mexicana de Mecatrónica A.C. – Instituto Tecnológico de San Luis Potosí. ISNB: 978-970-8702-03-3, año 2007.
15. Memorias del 4° Congreso Nacional de Mecatrónica, José Emilio Vargas Soto, Editorial: Asociación Mexicana de Mecatrónica A.C. – Universidad Tecnológica de Coahuila. ISNB: 970-9702-01-7, año 2005.
Capítulos de libros: 1. Chapter 2 – Fringe Patterns Analysis Phase Shifting Techniques Applied to Solid Digitalization in Arm Architecture,
Carlos-Alberto Ramos-Arreguín, Rodrigo Escobar-Diaz-Guerrero, Marco Antonio Aceves Fernández, Manuel Toledano-Ayala, José Emilio Vargas-Soto and Jesús Carlos Pedraza-Ortega, 3D Reconstruction Techinques, Analysis and New Developments, Editor: Josephine Weber, Nova Publishers, ISBN: 978-1-53610-242-0,pp. 39-70, New York, 2016.
2. Cap. 30 - Diseño Mecatrónico de un Robot Móvil, Garcia Sillas Daniel, Vargas Soto José Emilio, Díaz Delgado Guillermo y González Gutiérrez Arturo. Ingeniería Mecatrónica en México, 2016, Editores: Juan Manuel Ramos Arreguín, José Emilio Vargas Soto, Saúl Tovar Arriaga, ISBN: 978-607-9394-07-3, Asociación Mexicana de Mecatrónica A.C., pp- 352-360, 2016 México.
3. Cap. 31 - Desarrollo de un sistema embebido para proyectos mecatrónicos basados en motores brushless, Hernández Barrón Lorena Anaid, Vargas Soto José Emilio, Ramos Arreguín Juan Manuel y Pedraza Ortega Jesús Carlos, Ingeniería Mecatrónica en México 2016, Editores: Juan Manuel Ramos Arreguín, José Emilio Vargas Soto, Saúl Tovar Arriaga, ISBN: 978-607-9394-07-3, Asociación Mexicana de Mecatrónica A.C., p.p. 361-370, 2016 México.
4. Chapter 1- New strategy to Approach the Inverse Kinematics Model for Manipulators with Rotational Joints, José Emilio Vargas Soto, Efrén Gorrostieta Hurtado, Saúl Tovar Arriaga, Jesús Carlos Pedraza Ortega y Juan Manuel Ramos Arreguín, Automation and Control Trends, Editores: Pedro Ponce, Arturo Molina Gutiérrez y Luis M. Ibarra, ISBN on line: 978-953-51-2671-1, Print ISBN: 978-953-51-2670-6, InTech, pp.1-25, 2016.
5. Cap. 33 Simulador Applet de un Péndulo Simple Orientado a la Enseñanza de la Física a Nivel Secundaria, Altamirano Soria José Edgar, Jiménez Nava Jimena, Quijas Martínez Julio, Ramos Gutiérrez Jesús, Ulloa Calzada José Luis, José Emilio Vargas Soto y Jesús Carlos Pedraza Ortega, Ingeniería Mecatrónica. Proyectos y Aplicaciones, Editores: José Emilio Vargas Soto, Juan Manuel Ramos Arreguín y Jesús Carlos Pedraza Ortega, ISBN: 978-607-9394-00-4, Asociación Mexicana de Mecatrónica A.C. 2014, p.p. 179-184, México.
6. Chapter 1. Prediction algorithm PM10 particulate pollutants by Fuzzy Logic and Clustering. Martínez-Zerón E., Aceves-Fernández M. A., Sotomayor-Olmedo A., Pedraza-Ortega J. C., Vargas-Soto J. E., Gorrostieta-Hurtado E., Engineering and its Application, Vol. 1, Editors: Karen Esquivel Escalante, Eduardo Elizalde Peña, José Alberto Rodríguez Morales, Universidad Autónoma de Querétaro, Congreso Internacional de Ingeniería, ISBN: 978-607-513-XXX-X, Primera edición, pp. 1-5, Mayo 2014.
7. Chapter 14. Three- Dimensional Estimation in 1-D Wavelet Profilometry by establishing a comparison between Phase Unwrapping Algorithms, Jesús Carlos Pedraza-Ortega, Efren Gorrostieta-Hurtado, Marco A. Aceves Fernandez, Sandra L. Canchola-Magdaleno, Juan Manuel Ramos-Arreguin, Saul Tovar-Arrigaga, Emilio Vargas-Soto and Artemio Sotomayor-Olmedo, Wavelets: Classification, Theory and Applications, Nova Publishers, ISBN: 978-1-62100-252-9, año 2012.
8. Comparison between phase unwrapping algorithms for depth estimation in 1-D Wavelet Profilometry, Jesus Carlos Pedraza-Ortega, Efren Gorrostieta-Hurtado, Emilio Vargas-Soto, Juan Manuel Ramos-Arreguín, Marco Aceves-Fernández, Carlos Alberto Olmos-Trejo, Sandra Lus Canchola-Magdaleno, Saúl Tovar-Arriaga y Artemio Sotomayor-olmendo, Advances in Computer Science and Electronics Systems, Research in Computer Science, ISSN: 1870-4069, año 2011.
9. PMx Trends Contaminants by Using Support Vector Machines, Artemio Sotomayor-Olmedo, Marco Aceves-Fernández, Efren Gorrostieta-Hurtado, Carlos Pedraza-Ortega y Emilio Vargas-Soto, Advances in Computer Science and Electronics Systems, Research in Computer Science , ISSN: 1870-4069, año 2011.
10. A review on the Detection and Removal of Shawows in Daytime Traffic Images, Sandra Luz Canchola-Magdaleno, Carlos Pedraza-Ortega, Emilio Vargas-Soto, Saúl Tovar-Arriaga, Juan Manuel Ramos-Arreguín, Marco Aceves-Fernández, J. Salvador Hernández-Valerio y Hugo Ávila-Mendoza, Advances in Computer Science and Electronics Systems, Research in Computer Science, ISSN: 1870-4069, año 2011.
11. Advances in Airborne Pollution Forecasting Using Soft Computing Techniques, Aceves-Fernandez Marco Antonio, Sotomayor-Olmedo Artemio, Gorrostieta-Hurtado Efren, Pedraza-Ortega Jesus Carlos, Ramos-Arreguín Juan Manuel, Canchola-Magdaleno Sandra and Vargas-Soto Emilio, Air Quality Models and Applications, I-Tech, ISBN: 978-953-307-307-1, año 2011.
12. Three Dimensional Reconstruction Strategies Using a Profilometrical Approach based on Fourier Transform, Pedraza-Ortega Jesus Carlos, Gorrostieta-Hurtado Efren, Aceves-Fernandez Marco Antonio, Sotomayor-Olmedo Artemio, Ramos-Arreguin Juan Manuel, Fourier Transforms, Theory and Applications, Intech, ISBN: 978-953-307-231-9, año 2011.
13. Pneumatic Fussy Controller Simulation vs Practica Results for Flexible Manipulator, Juan Manuel Ramos-Arreguín, Jesus Carlos Pedraza-Ortega, Efren Gorrostieta-Hurtado, Rene de Jesús Romero-Troncoso, José Emilio Vargas-Soto and Francisco Hernández-Hernández, Robotics and Automation, I-Tech, ISBN: 978-3-902613-41-7, año 2008.
Dr. José Emilio Vargas Soto, [email protected]
Artículos publicados en revistas internacionales indexadas: 2016
1
Ramos-Arreguin Juan-Manuel, Tovar-Arriaga Saúl,_ Vargas-Soto José-Emilio, and Aceves-Fernández Marco-Antonio, FPGA
Embedded PD Control of a 1 dof Manipulator with a Pneumatic Actuator, International Journal of Robotics and
Automation, Vol. 31, No. 3, 2016.
Publicación indexada en: EBSCO, DOAJ - Directory of Open Access Journals, ProQuest, Google Scholar, BASE (Bielefeld
Academic Search Engine), Indonesian Publication Index (IPI), CORE (COnnecting REpositories), Knowledge Media Institute
(KMi), NewJour, SHERPA/RoMEO, University of Nottingham, Science Central, JournalTOCs, University of Zurich,
Bibliothekssystem Universität Hamburg, University Library of Regensburg.
Acumulado: 1
2015
1
E. Gorrostieta, E. Vargas-Soto, L. Zuñiga-Aviles, J. Rodriguez-Resendiz, and S. Tovar-Arriaga, Mechatronics methodology:
15 years of experience, Ingeniería e Investigación vol. 35 n.° 3, December - 2015 (107-114).
DOI: http://dx.doi.org/10.15446/ing.investig.v35n3.47543
Publicación indexada en: Publindex, DOAJ, Scielo, REDIB, Redalyc, Scopus, Dialnet, Latindex.
Acumulado: 2
2 D. Garcia-Sillas, E. Gorrostieta-Hurtado, J. E. Vargas, J. Rodríguez-Reséndiz, and S. Tovar, Kinematics modeling and
simulation of an autonomous omni-directional mobile robot, Ingeniería e Investigación vol. 35 n.º 2, august - 2015 (74-
79). DOI: http://dx.doi.org/10.15446/ing.investig.v35n2.47763
Publicación indexada en: Publindex, DOAJ, Scielo, REDIB, Redalyc, Scopus, Dialnet, Latindex.
Acumulado: 3
2014
1 L. A. Zúñiga-Avilés, J. C. Pedraza-Ortega, E. Gorrostieta-Hurtado, S. Tovar-Arriaga, J. M. Ramos-Arreguín, M. A. Aceves-
Fernández, J.E. Vargas-Soto, “HTG-based kinematic modeling for positioning of a multi-articulated wheeled mobile
manipulator”, Trabajo enviado el 10 de Julio del 2013, ACEPTADO para su publicación en Journal of Intelligent & Robotics
Systems, ISSN print: 0921-0296, ISSN Online: 1573-0409
Publicación indexada en: Journal Citation Reports (JCR Impact in 2012: 0.827), PsycINFO, Science Citation Index
Expanded, and Scopus.
Acumulado: 4
2014
2
Marco A. Aceves-Fernandez, J. Carlos Pedraza-Ortega, Artemio Sotomayor-Olmedo, Juan M. Ramos-Arreguín, J. Emilio
Vargas-Soto and Saul Tovar-Arriaga, Analysis of Key Features of Non-Linear Behaviour Using Recurrence
Quantification. Case Study: Urban Airborne Pollution at Mexico City, Environ Model Assess (2014) 19:139–152.
Publicación indexada en: Science Citation Index Expanded (SciSearch), Journal Citation Reports/Science Edition, SCOPUS,
Google Scholar, CSA, ProQuest, CAB International, Academic OneFile, AGRICOLA, CAB Abstracts, CSA Environmental
Sciences, Current Contents/ Agriculture, Biology & Environmental Sciences, EBSCO Discovery Service, EMBiology,
Environment Index, Gale, Global Health, INIS Atomindex, OCLC, Referativnyi Zhurnal (VINITI), SCImago, Summon by
ProQuest
Acumulado: 5
2013
1
Peña-Perez LM, Pedraza-Ortega JC, Ramos-Arreguin JM, Tovar-Arriaga S, Aceves-Fernandez MA, Becerra LO, Gorrostieta-
Hurtado E, Vargas-Soto JE., “Alignment of the Measurement Scale Mark during Immersion Hydrometer Calibration
Using an Image Processing System” , Sensors. 2013; Vol.13, Issue:11, pp.14367-14397, ISSN: 1424-8220.
Publicación indexada en: Journal Citation Reports (JCR Impact in 2012:1.953).
AGORA (FAO)external link, Analytical Abstracts (RSC Publishing)external link,CAB Abstracts (CABI)external link, CAS -
Chemical Abstracts (ACS)external link, COMPENDEX (Elsevier)external link, DOAJ - Directory of Open Access

Dr. José Emilio Vargas Soto, [email protected]
Journalsexternal link, EMBASE (Elsevier)external link, Energy & Power Source (EBSCO)external link, INSPEC (IET)external
link, Journal Citation Report (Thomson Reuters)external link, MEDLINE (NLM)external link, Polymer Library (Smithers
Rapra)external link, PubMed (NLM)external link, SCIE - Science Citation Index Expanded (Thomson Reuters)external link,
SciSearch (Thomson Reuters)external link, Scopus (Elsevier)external link, Web of Science (Thomson Reuters)external link.
Acumulado: 6
2 Artemio Sotomayor-Olmedo, Marco A. Aceves-Fernández, Efrén Gorrostieta-Hurtado, Carlos Pedraza-Ortega, Juan M.
Ramos-Arreguín, J. Emilio Vargas-Soto, “ Forecast Urban Air Pollution in Mexico City by Using Support Vector
Machines: A Kernel Performance Approach”, Editorial: Scientific Research, International Journal of Intelligence Science,
2013, Vol. 3, pp.126-135. ISSN Print: 2163-0283, ISSN Online: 2163-0356.
Publicación indexada en: ISI web of Knowledge, Academic Journals Database,Academic Keys,AiritiLibrary,Base-
Search,CrossRef(DOI), Directory of Open Access Journals (DOAJ), EBSCO, Gale,IndexCopernicus.
Acumulado: 7
3 Ubaldo Geovanni Villaseñor Carrillo, Efren Gorrostieta Hurtado, Jose Emilio Vargas Soto, Saul Tovar Arriaga, “Kinematic
Analysis and Simulation of an Omnidirectional Mobile Robot”, International Journal of Science and Advanced
Technology , Volume 3 No 2 February 2013, pp. 30-35, ISSN: 2221-8386 (Online).
Publicación indexada en: Index Copernicus, EBSCO, Directory of Open Acces Journals.
Acumulado: 8
4 Marco A. Aceves-Fernandez, J. Carlos Pedraza-Ortega, Artemio Sotomayor-Olmedo, Juan M. Ramos-Arreguín, J. Emilio Vargas-Soto, Saul Tovar-Arriaga, “Analysis of Key Features of Non-Linear Behaviour Using Recurrence Quantification. Case Study: Urban Airborne Pollution at Mexico City”, Environmental Modeling & Assessment, September 2013, ISSN (Print): 1420-2026 , ISSN (Online): 1573-2967.
Publicación indexada en: Journal Citation Report (JCR Impact Factor in 2012: 0.971), ISI web of Knowledge.
Acumulado: 9
2012
1 Tovar-Arriaga S, Vargas JE, Ramos JM, Aceves MA, Gorrostieta E, Kalender WA, “A Fully Sensorized Cooperative
Robotic System for Surgical Interventions”. Sensors. 2012; Editorial MDPI Publishing, 12(7):9423-9447, ISSN 1424-8220,
Suiza.
Publicación indexada en: Journal Citation Report (JCR Impact factor in 2012: 1.953)
AGORA (FAO)external link, Analytical Abstracts (RSC Publishing)external link,CAB Abstracts (CABI)external link, CAS -
Chemical Abstracts (ACS)external link, COMPENDEX (Elsevier)external link, DOAJ - Directory of Open Access
Journalsexternal link, EMBASE (Elsevier)external link, Energy & Power Source (EBSCO)external link, INSPEC (IET)external
link, Journal Citation Report (Thomson Reuters)external link, MEDLINE (NLM)external link, Polymer Library (Smithers
Rapra)external link, PubMed (NLM)external link, SCIE - Science Citation Index Expanded (Thomson Reuters)external link,
SciSearch (Thomson Reuters)external link, Scopus (Elsevier)external link, Web of Science (Thomson Reuters)external link.
Acumulado: 10
2 Emilio Vargas-Soto, Efrén Gorrostieta, Artemio Sotomayor-Olmedo, Juan-Manuel Ramos-Arreguin and Saul Tovar-Arriaga,
“Design of Fuzzy Algorithms Locomotion for Six Legged Walking Robot”. Editorial: Academic Journals, International
Journal of Physical Sciences, Vol. 7(11), pp. 1811 - 1819, 9 March, 2012. DOI: 10.5897/IJPS11.1723, ISSN 1992-1950.
Publicación indexada en: Chemical Abstract, Genamics Journal Seek, Google Scholar Metric, DOAJ, ABC Chemistry,
EVISA, Scientific Information Database, Global Impact Factor, Biofuels Abstracts, Botanical Pesticides, CAB Abstracts,
CABI's Environmental Impact, Crop Physiology Abstracts, Crop Science Database.
Acumulado: 11
Dr. José Emilio Vargas Soto, [email protected]
3 J. C. Moya Morales, C. A. Ramos Arreguín, A. Sotomayor Olmedo, E. Gorrostieta Hurtado, J. M. Ramos Arreguín, J. C.
Pedraza Ortega, S. Tovar Arriaga, J. E. Vargas Soto, “A strategy for 3d object digitalization using pre-filtering and post-
filtering stages”, Editorial Elsevier Ltd., Procedia Technology, Volume 3, pp 273–281 (The 2012 Iberoamerican Conference
on Electronics Engineering and Computer Science) ISSN: 2212-0173, 2012.
Publicación indexada en: ScienceDirect, SCOPUS, Ei Compendex, Thomson ISI by Elsevier.
Acumulado: 12
4 Marco A. Aceves-Fernández, J. Carlos Pedraza-Ortega, Artemio Sotomayor-Olmedo, Juan M. Ramos-Arreguín, J. Emilio
Vargas-Soto, Saúl Tovar-Arriaga, "Analysis of Key Features of Non-linear Behavior Using Recurrence Plots. Case
Study: Urban Pollution at Mexico City", Editorial: Scientific Research, Journal of Environmental Protection, 2012, Vol. 3
Special Issue, September 2012, pp.1147-1160, ISSN Print: 2152-2197, ISSN Online: 2152-2219.
Publicación indexada en: ISI web Knowledge, Directory of Open Access, Journals (DOAJ), EBSCO, Academic Journals
Database.
Acumulado: 13
5 García-López, M.C., Gorrostieta-Hurtado, E., Vargas-Soto, E., Ramos-Arreguín J.M., Sotomayor Olmedo A.y Moya Morales
J.C., “Kinematic analysis for trajectory generation in one leg of a hexapod robot ”, Procedia Technology, Volume 3, pp
342–350, The 2012 Iberoamerican Conference on Electronics Engineering and Computer Science,ISSN:2212-0173.
Publicación indexada en: ScienceDirect, SCOPUS, Ei Compendex, Thomson ISI by Elsevier, presentado en 2012
Iberoamerican Conference on Electronics Engineering and Computer Science.
Acumulado: 14
2011
1 Ramos-Arreguin Juan-Manuel, Gorrostieta-Hurtado Efrén, Pedraza-Ortega Jesus- Carlos, Aceves-Fernandez Marco-Antonio
and Vargas-Soto José-Emilio, “Fuzzy logic applied to control a one degree of freedom (DOF) pneumatic robot”,
International Journal of the Physical Sciences Vol. 6 (23), pp. 5575 - 5585, 9 October, 2011 ISSN 1992-1950, Nigeria 2011.
Publicación indexada en: Chemical Abstract, Genamics Journal Seek, Google Scholar Metric, DOAJ, ABC Chemistry,
EVISA, Scientific Information Database, Global Impact Factor, Biofuels Abstracts, Botanical Pesticides,CAB Abstracts,CABI's
Environmental Impact,Crop Physiology Abstracts,Crop Science Database.
Acumulado:15
2 Artemio Soto Mayor Olmedo, Marco Acevez Fernadez, Efrén Gorrostieta, Carlos Pedraza, Emilio Vargas, “Modeling PMx
Trends Contaminants by ussing Support Vector Machines”, Advances in Computer Science and Electronics Systems
Research in Computing Science Editorial: Instituto Politécnico Nacional, Vol. 52, pp 114-122. ISSN 1870-4069, México, 2011.
Publicación indexada en: Latindex, Periodica.
Acumulado: 16
3 Jesús Carlos Pedraza-Ortega, Efrén Gorrostieta-Hurtado, Emilio Vargas-Soto, Juan Manuel Ramos-Arreguín, Marco Acevez -
Fernandez, Carlos Alberto Olmos-Trejo, Sandra Luz Canchola-Magdaleno, Saúl Tovar-Arriaga, Artemio Soto Mayor- Olmedo,
”Comparison Between Phase Unwrapping Algorithms for Depth Estimation in 1-D Wavelet Profilometry" , Advances in
Computer Science and Electronics Systems, Research in Computing Science, Editorial Instituto Politécnico Nacional, Vol.
52, pp 190-203. ISSN 1870-4069, Mexico 2011.
Publicación indexada en: Latin Index, Periodica.
Acumulado: 17
4 Sandra Luz Canchola-Magdaleno, Jesús Carlos Pedraza-Ortega, Emilio Vargas Soto, Saúl Tovar Arriaga, Juan Manuel
Ramos-Arreguin, Marco Antonio Aceves-Fernández, J.Salvador Hernández-Valerio, Hugo Avila-Mendoza, “A Review on the
Detection and Removal of Shadows in Daytime Traffic Images“, Research in Computer Science, Editorial Instituto
Dr. José Emilio Vargas Soto, [email protected]
Politécnico Nacional, Vol. 52, p.p. 327-354, ISSN: 1870-4069, México, 2011.
Publicacion indexada en : Latinindex, Periodica.
Acumulado: 18
2008
1 Gorrostieta E. Vargas E., “Algoritmos de Locomoción Libere en un Robot Caminante de Seis Patas”, COMPUTACION
Y SISTEMAS. Revista Iberoamericana de Computación. ISSN 1405-5546, Enero - Marzo 2008, Vol. 11, No. 3. pp. 260-287,
ISSN 1405-5546.
Publicación indexada en: índice de Revistas Mexicanas de Investigación Científica y Tecnológica del CONACYT, E-Journal,
Latíndex y Periódica.
Acumulado: 19
2 Méndez M., Meneses X., Cado C. y Vargas E., “Desarrollo de un Robot Paralelo para Manufactura Ágil”, The Anáhuac
Journal, Oxford University Press, Second semester 2008,Vol. 8, No. 2, pp. 81-98, ISSN: 1405-8448.
Publicación Indexada en: EBSCO.
Acumulado: 20
2006
1 Ramos J.M. y Vargas E., “Nuevo Modelo Polinomial del Comportamiento de un Cilindro Neumático”, Revista
Internacional Información Tecnológica. Vol. 17, No. 3. pp. 99-106. 2006 , ISSN 0718-0764.
Publicación Indexada en: INSPEC, y base de datos de la IEE.
Acumulado: 21
2 Vargas E., “La Innovación Tecnológica, en Beneficio de la Población más Necesitada”, Entrevista al Director General
del CONACYT, The Anáhuac Journal, Oxford University Press, Vol. 6, No. 2, Second semestre 2006. ISSN: 1405-8448.
Publicación Indexada en: EBSCO.
Acumulado: 22
2005
1 Gracios M. Carlos A., Vargas S. Emilio y Díaz S. Alejandro, “Describing an IMS by a FNRTPN Definition: A VHDL Approach” , Robotics and Computer Integrated Manufacturing, ELSEVIER, U.K. Vol. 21, Issue 3, June 2005, ISSN 0736-5845.
Publicación indexada en: Applied Science and Technology Index, Current Contents/CompuMath, Current Contents/Engineering, Computing & Technology, ELSEVIER, Engineering Information Abstracts, Management Contents, Research Alert, SCISEARCH and Scopus.
Acumulado: 23
2 F. F. Kiyama and E. Vargas, “Dynamic Model Analysis of a Pneumatically Operated Flexible Arm” , WSEA TRANSACTIONS on SYSTEMS, Vol. 4, No 1, January, 2005, pp. 49-54, ISSN 1109-2777.
Publicación indexada en: Elsevier Bibliographic Databases, European Library in Paris, Directory of Published Proceedings and Engineering Information.
Acumulado: 24
2004
1 Gorrostieta E., y Vargas E., “Free Locomotion for Six Legged Robot” , WSEAS Transaction on Computers, 2004, Issue
3, Volume 3, pp. 795-800, ISSN 1109-2725.

Dr. José Emilio Vargas Soto, [email protected]
Publicación indexada en: Elsevier Bibliographic Databases, European Library in Paris, Directory of Published Proceedings
and Engineering Information.
Acumulado: 25
2 Gorrostieta E., y Vargas E., “A Neuro PD Control Applied for Free Gait on a Six Legged Robot” , WSEAS Transaction
on Computers, 2004, Issue 3, Volume 3, pp. 612-618, ISSN 1109-2725.
Publicación indexada en: Elsevier Bibliographic Databases, European Library in Paris, Directory of Published Proceedings
and Engineering Information.
Acumulado: 26
3 Gracios C., Vargas E. y Díaz A., “Model and Simulation of IMS using FNRTPN and VHDL: A New C.A.D. Method”, WSEAS Transaction on Systems, 2004, Issue 4, Volume 3, pp. 1441-1446, ISSN 1109-2777. Publicación indexada en: Elsevier Bibliographic Databases, European Library in Paris, Directory of Published Proceedings and Engineering Information.
Acumulado: 27
4 Gracios C., Vargas E. y Díaz A., “Describing an IMS by a FNRTPN Definition: A VHDL Approach” , WSEAS , Transaction on Systems, 2004, Issue 3, Volume 3, pp. 1060-1065, ISSN 1109- 2777. Publicación indexada en: Elsevier Bibliographic Databases, European Library in Paris, Directory of Published Proceedings and Engineering Information.
Acumulado: 28
5 Kiyama F., Vargas E., “Modelo Termomecánico Para Un Manipulador Tipo Dieléctrico” , Revista Internacional Información Tecnológica, 2004, Vol. 15, No. 5, pp. 23-31, ISSN- 0716-8756. Publicación indexada en: INSPEC, base de datos de la IEE.
Acumulado: 29
2002 1 Gorrostieta E., Aguado A. y Vargas E., “Diseño de un Controlador Neuronal Aplicado a la Generación de Pasos de un
Robot Caminante” , Ubamari, División de Estudios de Postgrado del Instituto Tecnológico de Durango, 2002, Año XIX, No. 53., pp. 32-48, ISSN 0185-4518. Publicación indexada en: Sistema regional de información en línea para revistas científicas de América Latina, el Caribe, España y Portugal.
Acumulado: 30
1998 1 Vargas E., “A New Real-time Control Method for Free Locomotion in a Walking Robot” , International Journal of
Computer Application in Technology, 1998, Vol. 11 Nos.1/2, pp. 77-83, ISSN 0952-8091. Publicación indexada en: INDERSCIENCE
Acumulado: 31
1994 1 Vargas E., "Control System of a Quadruped Walking Robot" , Instrumentation and Development, 1994, Vol.3, No.4, pp.
59-63. ISSN: 0187-8549. Publicación indexada en: Catálogo de Revistas de Excelencia del CONACYT.
Acumulado total: 32
Artículos publicados en revistas:
“Diversión, productividad y Competitividad, ROBOTS” , Chávez Raúl y Vargas Emilio. Revista Ejecutivos de Finanzas, el poder de los negocios. Publicación mensual, No.65, p.p. 64, Mayo 2008.
Entrevista, periódico REFORMA, 28 de Enero, 2008. Año 15, No. 5152, suplemento Posgrados, Pag. 12, “Con mucho beat”,
Ingeniería de la Música Electrónica.
“Al rescate social” , Cárdenas R., Vargas E., Suplemento Shock No. 56. Julio 2007. Periódico Excelsion, México D.F. “Entrevista al Dr. Gustavo Chapela, Director General del CONACYT” , Revista MISION MECATRONICA, No. 2, Año 2., p.p.17 , Octubre 2006, México D.F. “Entrevista al Director de CONACYT”, Vargas E., The Anáhuac Journal, Oxford University Press, Vol. 6, No. 2, Second semestre 2006. “Robotizar el Futuro con la Experiencia de Hoy” , Revista ENTREVER, No. 9, Año 1., p.p.1 , Marzo 2006, México D.F.

Dr. José Emilio Vargas Soto, [email protected]
“Robótica, Un Reto para la Ciencia y la Convivencia” , Revista CIENCIA Y DESARROLLO, Consejo Nacional de Ciencia y Tecnología – CONACYT, Volumen 30, p.p. 32 - 35, Julio 2005, México. ISBN: 0185-0008.
“Entrevista” , Revista VISION MECATRONICA, Asociación Mexicana de Mecatrónica A.C., Año 1, No.1, p.p 17, Mayo 2005, México.
“Mi entrenamiento en Japón” , Vargas E., PYME. Pequeñas y Medianas Empresas, JICA-CIDESI, Año 2, No.5, Noviembre 2002. “Aplicando la Tecnología” , Ramírez A., Solano J., Vargas E., PYME. Pequeñas y Medianas Empresas, JICA-CIDESI, Año 2, No.5, Noviembre 2002. “Mecatrónica. Perspectivas de Aplicación y Desarrollo en México” , Vargas E. NTHE Centro Bajío, 1997, No. 21 año IV, Suplemento Especial, pp. 20. "Diseño y Construcción de un Equipo para Fabricar Cintas Metálicas morfas", Rivera V., Reséndiz R., De la Herrán J., Vargas E., Anaskiewics P., Sociedad Mexicana de Instrumentación y Desarrollo. Vol. 2, No. 9, 1989.
Artículos en Congresos, Simposiums:
López Puebla Ricardo, Solís Ramírez Michael Giovanni, Pérez Uribe José Heli, García Monroy Jesús, De La Cruz Granados Luis Miguel, Hernández Ruiz Jessica Anahí, Dorantes Olvera Oscar Nahúm, Dorantes Chávez Israel, Pérez Rodríguez Andrea Guadalupe, Ramírez De Jesús Juan Carlos, Alvarado Flores Oscar Abimael, Nabor Aguilar Yesenia Juseth, Efrén Gorrostieta Hurtado y José Emilio Vargas Soto, “Simulación de un Mecanismo Biela-Manivela-Corredera”, Asociación Mexicana de Mecatrónica A.C. – Universidad Autónoma de Guadalajara, Campus Tabasco. 11° Congreso Nacional de Mecatrónica, ISBN: 978-607-95347-7-6. p.p. 277-280, Octubre 4 y 5, 2012. Villahermosa, Tabasco. México. Vega Hernández Susana, Tovar Arriaga Saúl, De León Cuevas Alejandro y Vargas Soto José Emilio, “Modelo Electrónico como Sistema de Entrenamiento para Cirugías en el Lóbulo Temporal en ORL”, Asociación Mexicana de Mecatrónica A.C. – Universidad Autónoma de Guadalajara, Campus Tabasco. 11° Congreso Nacional de Mecatrónica, ISBN: 978-607-95347-7-6. p.p. 277-280, Octubre 4 y 5, 2012. Villahermosa, Tabasco. México. Vargas Soto José Emilio, Ledesma Cienfuegos Janelly, Pérez Ledezma María Ebelina, González Servín Zaira Yared y Orozco Ramírez Jorge, ”Material Didáctivo de Mecatrónica para la Enseñanza Preescolar Bilingüe” , Memorias del 10° Congreso Nacional de Mecatrónica, Centro Internacional de Convenciones de Puerto Vallarta, Instituto Tecnológico Superior de Puerto Vallarta – Asociación Mexicana de Mecatrónica A.C., Puerto Vallarta, Jalisco, pp. 140-144, ISBN 978-607-95347-5-2, Noviembre 3 y4, 2011 Vargas Soto José Emilio, Tovar Arriaga Saúl, Canchola Magdaleno Sandra Luz, Gorrostieta Hurtado Efrén y Pedraza Ortega Jesús Carlos, ”Interface Gráfica Industrial para el Monitoreo de Ensamble de Tornillos” , Memorias del 10° Congreso Nacional de Mecatrónica, Centro Internacional de Convenciones de Puerto Vallarta, Instituto Tecnológico Superior de Puerto Vallarta – Asociación Mexicana de Mecatrónica A.C., Puerto Vallarta, Jalisco, pp. 140-144, ISBN 978-607-95347-5-2, Noviembre 3 y4, 2011. Pérez Arreguín Jorge Israel, Tovar Arriaga Saúl, Ubaldo Giovanni Villaseñor Carrillo, Gorrostieta Hurtado Efrén, Pedraza Ortega Jesús Carlos, V argas Soto José Emilio, Ramos Arreguín Juan Manuel y Sotomayor Olmedo Artemio, ”Robot Móvil de Tracción Diferencial con Plataforma de Control Modular para Investigación y Desarrollo Ágil de Proyectos” , Memorias del 10° Congreso Nacional de Mecatrónica, Centro Internacional de Convenciones de Puerto Vallarta, Instituto Tecnológico Superior de Puerto Vallarta – Asociación Mexicana de Mecatrónica A.C., Puerto Vallarta, Jalisco, pp. 140-144, ISBN 978-607-95347-5-2, Noviembre 3 y4, 2011. E. Guillen García, O.M. Cora Gallardo, J.M. Ramos Arreguín, C.A. Ramos Arreguín, J.E. Vargas Soto, M. Delgado Rosas, “Desarrollo e Implementación de un Sistema Difuso para un Robot Neumático con Software de Monitoreo”, VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico (CIINDET 2010) , IEEE sección Morelos, pp. 407-312.ISBN: 978-607-95255-2-1, Noviembre 24-26, 2010. Cuernavaca Morelos, México.
Ubaldo Geovanni Villaseñor Carrillo, Marco Antonio González Aguirre, Artemio Sotomayor Olmedo, Efren Gorrostieta Hurtado, Jesús Carlos Pedraza Ortega, José Emilio Vargas Soto and Saúl Tovar Arriaga, “Desarrollo de un Sistema de Navegación para Robots Móviles Mediante Diferentes Patrones de Comportamientos”, VIII Congreso Internacional sobre Innovación y Desarrollo Tecnológico (CIINDET 2010) , IEEE sección Morelos, pp. 407-312.ISBN: 978-607-95255-2-1, Noviembre 24-26, 2010. Cuernavaca Morelos, México.
Artemio Sotomayor Olmedo, M. Antonio Aceves Fernández, Efren Gorrostieta Hurtado, J. Carlos Pedraza Ortega, J. Manuel Ramos Arreguín, J. Emilio Vargas Soto, Saúl Tovar Arriaga. “Modeling Trends of Airborne Perticulate Matter by Using Support Vector Machines”, 7th International Conference of Electrical and Electronics Engineering Research (CIIIEE 2010), IEEE Aguascalientes and Instituto Tecnológico de Aguascalientes, pp. 42-46, ISBN: 978-607-95060-3-2, November 10-12, 2010. Aguascalientes, México.

Dr. José Emilio Vargas Soto, [email protected]
Vargas E. Gorrostieta E., Pedraza C. y Sotomayor A., “Simulación en Java de un Manipulador Hidráulico”, Memorias del XII Congreso Mexicano de Robótica, Universidad Autónoma de Sinaloa – Universidad de Occidente – Universidad Politécnica de Sinaloa – Asociación Mexicana de Robótica A.C. Mazatlán, Sinaloa, pp. 212-217, Noviembre 3 al 6, 2010. Ramos-Arreguín Carlos-Alberto, Moya-Morales Juan-Carlos, Ramos-Arreguín Juan-Manuel,Pedraza-Ortega Jesús Carlos, Canchola-Magdaleno Sandra-Luz, Vargas-Soto José-Emilio., ”Metodología de una Etapa Básica de un Sistema de Procesamiento de Imágenes Basado en FPGA” , Memorias del 9° Congreso Nacional de Mecatrónica, Benemérita Universidad Autónoma de Puebla – Asociación Mexicana de Mecatrónica A.C., Puebla, Puebla, pp. 235-240, ISBN 978-607-95347-2-1, Octubre 13-15, 2010. Vargas Soto José Emilio, Ramos Arreguín Juan-Manuel, Pedraza Ortega Jesús Carlos, Gorrostieta Hurtado Efren y Sotomayor Olmedo Artemio, “Simulación de un Manipulador Hidráulico Utilizando Java”, Memorias del 9° Congreso Nacional de Mecatrónica, Benemérita Universidad Autónoma de Puebla – Asociación Mexicana de Mecatrónica A.C., Puebla, Puebla, pp. 347-353, ISBN 978-607-95347-2-1, Octubre 13-15, 2010. Aragón P.R., Vargas E., “Intelligent System for the Architectural Coatings Production”, Memorias del 8º Congreso Nacional de Mecatrónica, Instituto Tecnológico de Veracruz – Asociación Mexicana de Mecatrónica, México, Veracruz. ISBN 978-607-95347-0-7, Noviembre 26 y 27, 2009.
Vargas E. and Chavez R., “Enseñanza de la Administración y Desarrollo de Proyectos Mecatrónicos”, Asociación Mexicana de Robótica A.C.-Instituto Tecnológico de Celaya. Celaya, Guanajuato. 29 de Sep.-2 deOctubre, 2009.
Vargas-Soto E. , “Teaching Mechatronics with Real Projects and Integral Vision”, Clute Institute for Academic Research, Proc. of the Teaching and Learning Conference, ISSN 1539-8757, Salzburg, Austria, Junio 23-26, 2008.
Vargas E. and Chavez R., “Teaching Mechatronics for New Business”, Clute Institute for Academic Research, Proc. of the European Applied Business Research Conference, ISSN 1539-8757, Rothenberg ob der Tauber, Germany, Junio 18-20, 2008.
Ortiz D, Méndez M., Vargas E. “Robot Móvil todo Terreno”, Memorias del 6to. Congreso Nacional de Mecatrónica. Asociación Mexicana de Mecatrónica A.C. – Instituto Tecnológico de San Luis Potosí, México. ISBN: 978-970-8702-03-3, San Luis Potosí, S.L.P., México. Novembre 8-10, 2007 Ortiz Sánchez-Navarro D., Méndez-Canseco M., Vargas-Soto E. “Mechatronics Methodology Applied to the Design and Control of a Mobile Robot”, 4th Latin America IEEE Robotic Symposium and IX Mexican Robotic Congreso. Asociación Mexicana de Robótica A.C. – Robotics and Automation Society IEEE, Universidad de Monterrey, Nuevo León, México. November 8-9, 2007 J.M. Ramos, E. Gorrostieta, E. Vargas, J.C. Pedraza, R.J. Romero y B. Ramírez, “Pneumatic Fuzzy Controller for a Flexible Armt”, 13th IEEE/IFAC International Conference on Methods and Models in Automation and Robotics, MMAR2007, ISBN 978-83-751803-2-9, Szczecin, Poland. 27-30 August, 2007. J.M. Ramos, E. Vargas, E. Gorrostieta, R.J. Romero y P. Callmell, “PID Control for a Pneumatic Cylinder of a Manipulator Robot”, 10th Internacional Conference on Mechatronics and Technology. ICMR 06 ITESM, Mexico City, 20th – 24th November, 2006 E. Vargas, “Diseño de un robot hexápodo tipo hormiga”, Congreso Mexicano de Robótica. COMRob 2006 Asociación Mexicana de Robótica A.C. – Facultad de Ingeniería U.N.A.M., Cd. de México, 19 y 20 de Octubre, 2006 J.M. Ramos, E. Gorrostieta, E. Vargas, J.C. Pedraza, R.J. Romero y B. Ramírez, “Pneumatic Cylinder Control for a Flexible Manipulators Robot”, 12th International Conference on Methods and Models in Automation and Robotics, MMAR2006, ISBN 978-83-60140-88-8,Miedzyzdroje, Poland. 28-31 August, 2006. J.M. Ramos, E. Vargas, E. Gorrostieta, R.J. Romero y J.C. Pedraza , “Pneumatic Cylinder Control PID for Manipulators Robot”, The 2006 Conference on Dynamics, Instrumentation and Control. August 13-16, 2006. Querétaro, Qro. J.A. Soto, J. E. Vargas y J.C. Pedraza , “A New Trajectory Generation Method Using Vision for a Robot Manipulator”, The 2006 Conference on Dynamics, Instrumentation and Control. August 13-16, 2006. Querétaro, Qro. Soto Cajiga J. A., Vargas Soto E. y Pedraza Ortega J. C., “Generación de Trayectorias para un Robot Manipulador Utilizando Procesamiento de Imágenes y Splines”, Memorias en el 2do. Congreso Internacional de Ingeniería. Universidad Autónoma de Querétaro. ISBN: 968-845-296-3 , Marzo 14-17, 2006, Querétaro, Qro. Soto J. A., Vargas E. y Pedraza J. C., “Generación de Trayectorias por Visión para un Robot Manipulador de 5 grados de Libertad”, Memorias del 4to. Congreso Nacional de Mecatrónica, Asociación Mexicana de Mecatrónica A.C., Universidad Tecnológica de Coahuila,ISBN: 970-9702-02-5 del CD, ISBN: 970-9702-01-7 del libro de memorias, pp. 38-42, Noviembre 3, 4 y 5 del 2005, Ramos Arizpe, Coahuila. Moreno R., Cabrera J. S., Hernández F., Vargas E. y Pedraza J.C., “Software de Simulación de un Robot Manipulador Marca Mitsubishi RV-2AJ ”, Memorias del 4to. Congreso Nacional de Mecatrónica, Asociación Mexicana de Mecatrónica A.C., Universidad Tecnológica de Coahuila,ISBN: 970-9702-02-5 del CD, ISBN: 970-9702-01-7 del libro de memorias, pp. 129-132, Noviembre 3, 4 y 5 del 2005, Ramos Arizpe, Coahuila.
Dr. José Emilio Vargas Soto, [email protected]
Hernández J.M. y Vargas E., “Modelación Cinemática y Planeación de Trayectoria para un Manipulador Neumático”, Memorias del 4to. Congreso Nacional de Mecatrónica, Asociación Mexicana de Mecatrónica A.C., Universidad Tecnológica de Coahuila,ISBN: 970-9702-02-5 del CD, ISBN: 970-9702-01-7 del libro de memorias, pp. 166-171, Noviembre 3, 4 y 5 del 2005, Ramos Arizpe, Coahuila. Sánchez O., Reyes M., y Vargas E., “Diseño de un Robot Caminante Hexápodo Tipo Hormiga”, Memorias del 4to. Congreso Nacional de Mecatrónica, Asociación Mexicana de Mecatrónica A.C., Universidad Tecnológica de Coahuila,ISBN: 970-9702-02-5 del CD, ISBN: 970-9702-01-7 del libro de memorias, pp. 172-177, Noviembre 3, 4 y 5 del 2005, Ramos Arizpe, Coahuila.
Vargas E., “Metodología en Proyectos Mecatrónicos Industriales”, 1er. Congreso y Taller Internacional de Mecatrónica, Asociación Mexicana de Ingenieros Mecánicos y Electricistas A.C., AMIME, Instituto Tecnológico de Mérida, Universidad Autónoma de Yucatán. 12-14 de Mayo 2005. Mérida, Yucatán. F. F. Kiyama and E. Vargas, “Dynamic Model Analysis of a Pneumatically Operated Flexible Arm”, Proceedings of the 4th WSEAS International Conference On SIGNAL PROCESSING, ROBOTICS AND AUTOMATION. ISBN 960-8457-09-2, Salzburg, Austria. February 2005.
Vargas E, Rodríguez W., An Innovative Automatic Machine To Manipulate Sheet of Cardboard, Memorias del 2° Congreso Internacional en Innovación y Desarrollo Tecnológico, IEEE Sección Morelos - AMIME. Noviembre 15-19, 2004, Cuernavaca, Morelos. México. Vargas E, Rodríguez W., Mechatronics Design of an Automatic Machine To Manipulate Sheet of Cardboard , Proceedings of The International Congress on Mechatronics and Robotics MECH&ROB 2004, IEEE Industrial Electronics Society, European Center for Mechatronics, ISBN 3-938153-30-X, Septiembre 13-15, 2004, Aachen. Alemania. W. Rodríguez, E. Vargas. “Developing a New Automatic Machine to Manipulate Sheet of Cardboard” , Proceedings of the International Symposium on Robotics and Automation, ISRA 2004, ISBN 970-9702-00-9, Agosto 25-27, 2004. Querétaro City. F. Kiyama, E. Vargas, “Modeling of A Single Degree of Freedom Flexible Arm Pneumatically Operated” , Proceedings of the International Symposium on Robotics and Automation, ISRA 2004, ISBN 970-9702-00-9,25-27 Agosto, 2004. Querétaro City. C. A. Graciós Marín, E. Vargas Soto, A. Díaz Sánchez ,“Describing an IMS by a FNRTPN definition: A VHDL approach” , 4th WSEAS Int. Conf. on Soft Computing, Optimization, Simulation & Manufacturing Systems, SOSM 2004, Miami, Florida, Abril 21-23, 2004. Gorrostieta E., y Vargas E. ,“Free Locomotion for Six Legged Robot” , 3er. WSEAS International Conference on Signal Processing, Robotics and Automation, ISPRA 2004, ISBN 960-8052-95-5, Febrero 13-15, Salzburg, Austria. 2004 Gorrostieta E., y Vargas E., “A Neuro PD Control Applied for Free Gait on a Six Legged Robot ” , 3er. WSEAS International Conference on Signal Processing, Robotics and Automation (ISPRA 2004) ISBN 960-8052-95-5, Febrero 13-15, Salzburg, Austria, 2004. Gorrostieta E., Vargas E., "Algoritmos de Locomoción Libre en Robots Caminantes" , 2do. Congreso Nacional de Mecatrónica. Asociación Mexicana de Mecatrónica A.C., Universidad Anáhuac del Sur, Noviembre 2003. México D.F. Kiyama F., Vargas E., "Modelo Integral del Accionamiento Neumático para un Robot Flexible Industrial" , 2do. Congreso Nacional de Mecatrónica. Asociación Mexicana de Mecatrónica A.C., Universidad Anáhuac del Sur, Noviembre 2003. México D.F. Kiyama F., Vargas E., "Modelación de la Operación Neumática de un Brazo Manipulador”, Congreso Nacional de Robótica. CONAR2003, Academia Nacional de Investigaciones en Robótica, ANIROB. Instituto Tecnológico de Reynosa, Octubre 8-10, 2003. Gorrostieta E., Vargas E., Cruz L., Martínez E., “ Simulador de Un Robot Caminante de Seis Patas” , 5º. Congreso Internacional de Eléctrica y Electrónica Aplicada, CIEEA 2003, Instituto Tecnológico de Durango, Durango, Octubre 7-10, 2003. Kiyama F., Vargas E., "Modelo Orientado a Mejorar la Actuación en un Manipulador Flexible de Tipo Industrial", 5o. Congreso Mexicano de Robótica. Asociación Mexicana de Robótica A.C., Universidad Autónoma de San Luis Potosí, Agosto 2003. México, San Luis Potosí. Gorrostieta E., Aguado A., Vargas E., “Designing a Neuro PD with Gravity Compensation for a Six Legged Robot” , Informática 2003, La habana-Cuba, ISBN 959237095-8. Marzo 2003. Vargas E., Gorrostieta E. y Pérez A., “Desarrollando una Pata para un Robot Hexápodo” , VII Reunión Internacional de Ingeniería Mecánica Octubre 30- Noviembre 1, 2002. San Luis Potosí, México. Gorrostieta E., Vargas E., “Diseño de un Controlador Aplicado a la Generación de Pasos en un Robot Caminante” , IV Congreso Internacional de Eléctrica y Electrónica Aplicada, CIEEA 2002, Instituto Tecnológico de Durango, 7-11 de Octubre 2002, México. Solano J., Ramírez A., y Vargas E. “Robot Móvil Orientado a Inspección No Destructiva en Tanques Ferromagnéticos”, 4to. Congreso Mexicano de Robótica, Asociación Mexicana de Robótica, Septiembre 2002, México D.F.

Dr. José Emilio Vargas Soto, [email protected]
Ramírez A., Solano J., y Vargas E., “Robot Móvil para Medir Espesores de Pared Ferromagnética por Ultrasonido” , VIII Congreso Anual SOMIM-1er Congreso Anual de la Academia de Ingeniería, Septiembre 2002, Monterrey N.L. Gorrostieta E.,Vargas E., “Designing a PD Control with Gravity Compensation for a six Legged Robot” , 3th International Symposium on Robotics and Automation, ISRA2002, Anirob-IEEE, Agosto 2002, Toluca, Edo. De México. Vargas E., Reynoso G., Villarreal L, Mier R., "Diseño de un Robot Industrial para Aplicaciones de Limpieza en Subestaciones Eléctricas" , 3er. Congreso Mexicano de Robótica, Asociación Mexicana de Robótica. Septiembre 2001, Querétaro. Vargas E., Reynoso G., Villarreal L., Romero O., Ituarte J.C., Zamarripa M., Hernández M., Hernández D. y Arciniega S., "Robot Manipulador para Aplicaciones de Recubrimiento en Líneas de Alta Tensión" , XXXI Congreso de Investigación y Extensión del Sistema Tecnológico de Monterrey, Enero 2001, Monterrey. Solano J., Vargas E., Gorrostieta E., Morales C., "Designing a Six Legged Robot", International Simposium on Robotics and Automation, ISRA 2000, Monterrey. Gorrostieta E., Solano J., Morales C., Vargas E., “Diseñando un Robot Caminante de Seis Patas” , 2do. Congreso Nacional de Robótica. Asociación Mexicana de Robótica. Toluca, Septiembre,2000. E. Vargas., “Metodología Aplicada al Desarrollo de Máquinas Mecatrónicas” , Congreso Latinoamericano de Instrumentación y Control de Procesos. Universidad Autónoma de Querétaro. Agosto 2000. México. E. Vargas, “Controlabilidad de un Robot Caminante”, Ciclo de Conferencias en Robótica. Instituto Tecnológico de Celaya. Abril, 2000. E. Vargas, “Some aspects in the Locomotion of Walking Robots”, Taller de Computación e Inteligencia Artificial, IEEE sección Cuernavaca, Noviembre 1999. E. Vargas, “Free Locomotion Gaits For a Four Legged Machine”, 1er. Congreso de Robótica, Asociación Mexicana de Robótica. Septiembre 1999, Torreón Coahuila. E. Vargas, “Free Locomotion Gait and Control System for Quadruple Robots” , International Congress on Industrial Automation and Material Science Mexico-Hungary, UAQ, Facultad de Ingeniería, Marzo 1999. E. Vargas, "Desarrollando de un Sistema de Telepresencia para Controlar una Grúa" , 3er. Congreso Nacional de la Sociedad de Ingeniería Mecánica (SOMIM), Octubre de 1997, Michoacán. p.p. 342-346. E. Vargas, "A New Real-Time Control Method for Free Locomotion in a Walking Robot", IX Congreso de Instrumentación. Cancún. Septiembre 1994. México. E. Vargas, M.A. Armada, P. González de Santos, "Adaptabilidad de un Robot Caminante en Terreno Irregular", 3er. Congreso Internacional de Automatización y Robótica Integrada. Zaragoza, Noviembre 1993. España. E. Vargas, M.A. Armada, P. González de Santos, "A 3D Graphic Simulator for Task Planning of a Walking Robot", International Congress on Computer Systems and Applied Mathematics. Sn. Petersburg, Julio 1993, Rusia. M.A. Jiménez, E. Vargas, M.A. Armada y P. González de Santos, "Diseño y Realización de un Robot Caminante de Cuatro Patas", XIII Congreso Internacional de Automática y Control. Buenos Aires. Septiembre 1992, Argentina. E. Vargas, M.A. Jiménez, M.A. Armada, "A Graphic Simulator for the Telepresence Station of a Legged Locomotion Robot", 4th International Symposium on Offshore Robotics and Artificial Intelligence. Marsella, Diciembre 1991, Francia. M. A. Jiménez, E. Vargas, M.A. Armada, "Implementación y Simulación de Modos de Caminar para un Robot de Cuatro Patas", 2do. Congreso Internacional de Robótica, Zaragoza, Noviembre 1991, España. Vargas E., "Diseño de un Manipulador de Dos Grados de Libertad", VII Congreso Nacional de Instrumentación. León, Guanajuato. Septiembre 1990, México. Taro A., Vargas E., "Diseño de una Mesa Auxofitón", V Simposio de Instrumentación., Querétaro, Qro., Octubre 1988, México. Rivera V., Reséndiz R., De la Herrán J., Vargas E., Anaszkiewics P., "Equipo para la Obtención de Cintas Metálicas Amorfas", V Simposio de Instrumentación. Querétaro, Qro., Octubre 1988, México.
Informes Técnicos
"Telescopio Géminis 600-B (CIO)", Reséndiz R., Vargas E., Ruiz G. Centro de Instrumentos-UNAM. México D.F. "Subsistema del Disco de Rotación y Soporte del Crisol en un Equipo para la Obtención de Cintas Metálicas Amorfas", Vargas E., Reséndiz R., Centro de 7 Instrumentos-UNAM. México D.F.

Dr. José Emilio Vargas Soto, [email protected]
"Mechanical Design of Industrial Robots", Vargas E., Kazuo T., Reporte interno. Mechanical Engineering Laboratory. Mechanism Division. Robotics Departament. Japón, Enero 1990. "Computadores en la Industria", Vargas E., Armada M., Informe Final. Instituto de Automática Industrial. Consejo Superior de Investigaciones Científicas, Madrid, Agosto 1992. "Study of Free Gaits for a Four Legged Locomotion Robot", Vargas E., Kazuo T., Informe de la estancia de investigación. Mechanical Engineering Laboratory. Mechanism Division. Robotics Departament. Japón, Mayo 1992.
8. PATENTES NACIONALES E INTERNACIONALES
Instituto Mexicano de la Propiedad Industrial Solicitud de patente: PA/E/2006/010865 Fecha: Febrero 17, 2006, hora: 12h09 Solicitante: Tecnología Especializada en el Medio Ambiente S.A. de C.V. Inventores: Dr. José Emilio Vargas Soto, Aqr. José Lorenzo Vargas Soto y C.P. José Carlos Vargas Soto Título de la invención: Lirio Acuático Procesado y Acondicionado una Alternativa Alimenticia Expediente: Pa/a/2006/001871 Instituto Mexicano de la Propiedad Industrial Solicitud de patente: PA/E/2006/010863 Fecha: Febrero 17, 2006, hora: 12h09 Solicitante: Tecnología Especializada en el Medio Ambiente S.A. de C.V. Inventores: Dr. José Emilio Vargas Soto, Aqr. José Lorenzo Vargas Soto y C.P. José Carlos Vargas Soto Título de la invención: Lirio Acuático Procesado y Acondicionado Alternativa en la Generación de Energía Alterna Expediente: Pa/a/2006/001870
Instituto Mexicano de la Propiedad Industrial Solicitud Internacional de patente: PCT/MX 2006/000038 Fecha: Mayo 22, 2006 Solicitante: Tecnología Especializada en el Medio Ambiente S.A. de C.V. Inventor: Dr. José Emilio Vargas Soto Título de la invención: Lirio Acuático Procesado y Acondicionado una Alternativa Alimenticia Instituto Mexicano de la Propiedad Industrial Solicitud Internacional de patente: PCT/MX 2006/000037 Fecha: Mayo 22, 2006 Solicitante: Tecnología Especializada en el Medio Ambiente S.A. de C.V. Inventor: Dr. José Emilio Vargas Soto Título de la invención: Lirio Acuático Procesado y Acondicionado Alternativa en la Generación de Energía Alterna
Nombre: UTILIZACIÓN DEL LIRIO ACUÁTICO PROCESADO COMO VEHÍCULO Y/O AGENTE PARA ABSORBER Y APLICAR PLAGICIDAS, INSECTICIDAS Y/O REPELENTES DE ORIGEN ORGÁNICO Y/O QUÍMICO Inventores: Arq. José Lorenzo Vargas Soto, Dr. José Emilio Vargas Soto y C.P. José Carlos Vargas Soto Folio de patente: PA/a/2004/001023 Número: 29636 Estado: Satisfecho el examen de forma. Instituto Mexicano de la Propiedad Industrial Nombre: ACONDICIONAMIENTO DE LIRIO ACUÁTICO ALTERNATIVA EN LA FERTILIDAD DEL SUELO Inventores: Arq. José Lorenzo Vargas Soto, Dr. José Emilio Vargas Soto y C.P. José Carlos Vargas Soto Folio de Patente: PA/a/2003/010282 Número: 261856 Estado: Satisfecho el examen de forma. Instituto Mexicano de la Propiedad Industrial Nombre: LIRIO ACUÁTICO: ALTERNATIVA BIOLÓGICA PARA REMEDIAR LA CONTAMINACIÓN EN SUELOS Y AGUA Inventores: Dr. José Emilio Vargas Soto, Arq. José Lorenzo Vargas Soto y C.P. José Carlos Vargas Soto Folio de Patente: PA/a/2001/009585 Número: 43665 Estado: Satisfecho el examen de forma. Instituto Mexicano de la Propiedad Industrial
9. PARTICIPACION EN SIMPOSIOS, SEMINARIOS, CONVENCIONES, ETC.
1. Conferencia magistral: “Administración de Proyectos Mecatrónicos”, 8º Congreso Nacional de Mecatrónica, Asociación Mexicana de Mecatrónica A.C. – Instituto Tecnológico de Veracruz, México, Veracruz, 26 y 27 de Noviembre, 2009.
2. Conferencia plenaria “Robótica y Mecatrónica”, Expo Robótica 2009. World Trade Center, México D.F.,12 al 15 de Noviembre, 2009.
3. XI Congreso Mexicano de Robótica (ComRob 2009), Asociación Mexicana de Robótica A.C.-Instituto Tecnológico de Celaya. Celaya, Guanajuato. 29 de Sep.-2 de Octubre, 2009.

Dr. José Emilio Vargas Soto, [email protected]
4. Conferencia Magistral “Resistencia al Cambio”, Dirección General de Educación Militar y Rectoría de la Universidad del Ejército y Fuerza Aérea Mexicanos, Escuela Militar de Ingenieros. México D.F. 13 de Julio, 2009.
5. Congreso Internacional de Biomecánica. CIATEC-Centro de Innovación Aplicada en Tecnologías Competitivas, León, Guanajuato.21 y 22 de Mayo, 2009.
6. Conferencia Magistral: “Proyectos Mecatrónicos”, 1er Congreso de Ingeniería y Arquitectura, ITESM Campus Querétaro, Querétaro, Qro.,Marzo 21, 2009.
7. IV Congreso de Informática, Robótica e Inteligencia Artificial, Congress University, Acapulco, Guerrero, 20-22 de Noviembre, 2008.
8. 3er. Festival Octubre Anáhuac. Universidad Anáhuac México Sur, Plaza Loreto, México D.F., Octubre 2008
9. Primer Congreso Internacional de Investigación, Instituto Tecnológico de Cd. Juárez, cd. Juparez, Chih., Octubre 8-10, 2008.
10. Congreso Internacional de Ingeniería Mecánica y Mecatrónica. Instituto Tecnológico de Hermisollo, Hermosillo, Sonora. Octubre 7-10, 2008.
11. 7° Congreso Mexicano de Mecatrónica. Instituto Tecnológico de Durango – Asociación Mexicana de Mecatrónica A.C., Durango, Durango, Octubre 2-4, 2008.
12. 10 Congreso Mexicano de Robótica. Universidad Anáhuac México Sur – Asociación Mexicana de Robótica A.C., México D.F., Septiembre 25-26, 2008.
13. 3er. Congreso Nacional de Ingenierías Mecánica, Eléctrica, Electrónica y Mecatrónica-CIMEEM 2008, Universidad Autónoma Metropolitana. Cd. de México, Junio 27, 2008.
14. International Teaching and Learning Conference, Clute Institute for Academic Research, Salzburg, Austria, Junio 23-26, 2008.
15. European Applied Business Research Conference, Clute Institute for Academic Research, Rothenberg ob der Tauber, Germany, Junio 18-20, 2008.
16. 3er. Congreso Nacional de Ingenierías Mecánica, Eléctrica, Electrónica y Mecatrónica - CIMEEM 2008, Universidad Autónoma Metropolitana, Azcapotzalco, Junio, 2008.
17. 6to. Congreso Nacional de Mecatrónica. Asociación Mexicana de Mecatrónica A.C. – Instituto Tecnológico de San Luis Potosí, México. ISBN: 978-970-8702-03-3, San Luis Potosí, S.L.P., México. Novembre 8-10, 2007
18. 4th Latin America IEEE Robotic Symposium and IX Mexican Robotic Congreso. Asociación Mexicana de Robótica A.C. – Robotics and Automation Society IEEE, Universidad de Monterrey, Nuevo León, México. November 8-9, 2007
19. TecnoUAS-2007, Universidad Anáhuac México Sur. Cd. De México. Noviembre 6 y 7,2007.
20. XIV Congreso Nacional de Estudiantes de Ingeniería Mecánica, Eléctrica, Electrónica y Ramas Afines-CONEIMERA, Callao-Perú., Octubre 8-12, 2007
21. 2do. Seminario Internacional de Mecatrónica. Universidad Católica del Norte-Asociación Chilena de Mecatrónica A.C.-IdeaChile S.A., Antofagasta-Chile. Julio 26, 2007
22. 5to Congreso Nacional de Mecatrónica.Conferencia magistral “La Mecatrónica en México” , Asociación Mexicana de Mecatrónica A.C. Centro Cultural Manuel Gómez Morín, UVM-Querétaro, Querétaro, Qro. 23-25 de Noviembre, 2006
23. 10th International Conference on Mechatronics and Technology. ICMR 06 ITESM, Mexico City, 20th – 24th November, 2006
24. 8vo. Congreso Mexicano de Robótica. COMRob 2006 Asociación Mexicana de Robótica A.C. – Facultad de Ingeniería U.N.A.M., Cd. de México, 19 y 20 de Octubre, 2006.
25. International Conference on Dynamics, Instrumentation and Control. CONCYTEQ-IEEE, Querétaro, México, del 13-16 de Agosto, 2006.
26. Ciclo Internacional de Robótica, Universidad de Guadalajara, CU Lagos, 19 al 21 de Julio, 2006
27. TecnoUAS 2005, Universidad Anáhuac del Sur, México D.F., Noviembre 8 y 9, 2005.
28. 3er. Coloquio Internacional de Mecatrónica. Conferencia magistral: “Mecatrónica Aplicada a la Industria”, Universidad La Salle Noroeste, Cd. Obregón, Sonora. Octubre 26, 2005.
29. 5to. Simposium Internacional de Ingeniería y Ciencias Economico-Administrativas, Conferencia Magna: “CAP_MECATRONICA Apoyando a las PyMES”, Instituto Tecnológico de Cd. Juárez, Chihuahua. Sep. 27, 2005
30. ISA EXPOCONTROL 2005, Conferencia: “Mecatrónica”, Sociedad de Instrumentistas de America Latina. Centro Banamex, México D.F., Junio 22, 2005.
31. 1er. Simposium TECNOELECTRONICA 2005. Conferencia: Mecatrónica., “Instituto Tecnológico de Apizaco, RAMA IEEE-ITA, Apizaco, Tlaxcala, Mayo 19, 2005.
32. 1er. Congreso y Taller Internacional de Mecatrónica, Conferencia Magistral: “Metodología en Proyectos Mecatrónicos Industriales”, Asociación Mexicana de Ingenieros Mecánicos y Electricistas A.C., AMIME, Instituto Tecnológico de Mérida, Universidad Autónoma de Yucatán. 12-14 de Mayo 2005. Mérida, Yucatán.
33. 10 Concurso Nacional de Minirobótica. Comité organizador, y juez en la categoría de Robot Manipulador. ITESM Campus Querétaro, 5 y 6 de Mayo, 2005.
34. Semana del Estudiante Tecnológico 2005., Conferencia: Innovación Mecatrónica en la Industria, Instituto Tecnológico de San Luis Potosí., Abril 28, 2005. S.L.P., México.
35. Congreso Internacional de Mecatróica 2005. Conferencia: Aplicaciones Mecatrónicas en la Industria. Instituto Tecnológico Superior de San Luis Potosí. Marzo 2, 2005. México.
36. Expoelectrónica 2004, Conferencia: Mecatrónica. Universidad Tecnológica de San Juan del Rio. Noviembre 25, 2004. México.
37. TECNOUAS 2004, “Desarrollando Proyectos Mecatrónicos”, Universidad Anáhuac del Sur, Noviembre 8, 2004. México City.
38. 3er. Congreso Nacional de Mecatrónica. Asociación Mexicana de Mecatrónica A.C. Noviembre 4-6, 2004. Querétaro, México.
39. Simposio “La Investigación y el Desarrollo Tecnológico en Querétaro 2004”, CONCYTEQ-CANACINTRA. Octubre 20, 2004. Querétaro, México
40. Congreso de Producción y Mantenimiento. “Ingeniería en Mecatrónica”, Universidad Tecnológica de Querétaro. Octubre 13-15,2004. Querétaro, México
41. CONEIMERA 2004. Universidad Nacional de Piura. Octubre 4-9, 2004. Piura, Perú.
Dr. José Emilio Vargas Soto, [email protected]
42. Foro de Mecatrónica, “Desarrollo de Proyectos Mecatrónicos”, Instituto Tecnológico de Durango, Septiembre 24, 2004. Durango, México
43. Mech&Rob2004. International Congress on Mechatronics & Robotics. Aagen-Germany, Agosto 2004.
44. 4th International Symposium on Robotics and Automation, “Tutorial: Introduction to Industrial Mechatronics”, ISRA 2004. Querétaro, Agosto 2004
45. Curso de Robótica para niños, organizado por la Universidad del Valle de México Campus Querétaro. Julio 23, 2003. Querétaro, México.
46. Seminario de Postgrado. Instituto Tecnológico de Morelia. “Mecatrónica Aplicada”, Instituto Tecnológico de Morelia, Junio 2004, Morelia, Michoacán. México.
47. 3er. Congreso Nacional de Ingenierías en Sistemas Computacionales, “Desarrollo de Proyectos Mecatrónicos Industriales”, Instituto Tecnológico de Minatitlán, Mayo 26-28, 2004. Minatitlán, México.
48. Evento Cultural Estudiantil, “La Mecatrónica Aplicada a la Manufactura”, Universidad Tecnológica de Coahuila. Mayo 21, 2004
49. VI Semana del Quehacer Científico y Tecnológico, “Diseño de Maquinaria Mecánica”, Consejo de Ciencia y Tecnología del Estado de Querétaro. Mayo , 2004. México.
50. VI Semana del Quehacer Científico y Tecnológico, “Diseño de Sistemas Mecatrónicos”, Colegio de Estudios Científicos y Tecnológicos. Plantel Pinal de Amoles. Mayo 17, 2004. Querétaro, México.
51. 9° Concurso Nacional de Minirobótica. Organizado por el IEEE sección Querétaro, y la Universidad del Valle de México Campus Querétaro. Moderador en el panel: Mecatrónica Industrial. Mayo, 2003, Querétaro, México.
52. Evento Estudiantil de Mecatrónica. “Diseño de Máquinas Mecatrónicas”, Instituto Tecnológico de Querétaro, Febrero 4, 2004. Querétaro, México.
53. EXPO TECNOCIENCIAS 2003, organozado por la Universidad del Valle de México Campus Querétaro. Conferencia: Diseño de un Robot Caminante de Seis Patas”, Diciembre 2, 2003. Querétaro, México.
54. III Reunión de Prospectiva Tecnológica. CONACYT-ADIAT, Monterrey, Noviembre, 2003
55. Toma de Protesta del Capítulo Estudiantil y 49 Aniversario del Instituto, organizado por el Instituto Tecnológico de Ciudad Madero, conferencia: Diseño Mecatrónico de Maquinaria Industrial. Noviembre 2003, Cd. Madero-Tamaulipas, México.
56. 2do. Congreso Nacional de Mecatrónica, organizado por la Asociación Mexicana de Mecatrónica A.C. y la Universidad Anahuac del Sur. Conferencia: Algoritmos de Locomoción Libre para un Robot Hexápodo”, Noviembre 2003, Cd. de México, México.
57. 4° Simposium Nacional de Ingeniería Mecánica, organizado por el Instituto Tecnológico de la Laguna. Conferencia: Diseño Mecatrónico de Maquinaria Industrial, Octubre 24, 2003. Torreón-Coahuila, México
58. Congreso Internacional de Metal-Mecánica, “Diseño de Una Máquina Automática para Embalaje”, Instituto Tecnológico de Durango, Octubre 6-10, 2003. Durango, México.
59. Congreso Nacional de Robótica, Conferencia Magistral “Locomoción y Aplicación de Robots Caminantes”, Academia Nacional de Investigaciones en Robótica-ANIROB, Instituto Tecnológico de Cd. Reynosa, Octubre 8-10, 2003. Cd. Reynosa, México.
60. Congreso Nacional de Robótica, Curso Taller “La Mecatrónica”, Academia Nacional de Investigaciones en Robótica-ANIROB, Instituto Tecnológico de Cd. Reynosa, Octubre 8-10, 2003. Cd. Reynosa, México.
61. III Simposium Internacional de Ingeniería y Ciencias Economico-Administrativas, organizado por el Instituto Tecnológico de Cd. Juárez. Septiembre 2003, Cd. Juárez-México.
62. 3er. Seminario de Investigación CIDESI-Institutos Tecnológicos, Instituto Tecnológico de León, Septiembre 4-5, 2003. León, Guanajuato, México.
63. 5to. Congreso Mexicano de Robótica, COMROB 2003, organizado por la Asociación Mexicana de Robótica A.C., Conferencia: Modelo Orientado a Mejorar la Actuación de un Manipulador Flexible de Tipo Industrial”, Agosto 15, 2003. San Luis Potosí, México.
64. Conferencia: Mecatrónica. Organizada por la Universidad Tecnológica de San Juan del Rio. Agosto 7, 2003. Querétaro, México.
65. Quinto Verano CIDESI 2003, organizado por el Centro de Ingeniería y Desarrollo Industrial. Agosto 2003, Querétaro, México.
66. XXXV Aniversario del ITO, organizado por el Instituto Tecnológico de Oaxaca. Conferencias: Sistemas Mecatrónicos y La Investigación Tecnológica en México en el Nuevo Milenio”. Mayo 26, 2003. Oaxaca, México.
67. 1er. Encuentro Nacional de Mujeres en la Ingeniería, “Diseñando Mecatronicamente”, Instituto Tecnológico de Cd. Madero, Mayo 23, 2003. Cd. Madero, México.
68. 8vo. Concurso Nacional de Minirobótica, organizado por el IEEE sección Querétaro y el Instituto Tecnológico de Querétaro. Conferencia: Diseño de un Robot Movil de Tipo Industrial. Mayo 2, 2003. Querétaro, México.
69. 3era EXPO EXPERIMENTAL 2003, organizada por la Universidad Tecnológica del Norte de Guanajuato, Conferencia: Ventajas de la Tecnología Mecatrónica, Abril 2003, Dolores Hidalgo-Guanajuato, México.
70. II Reunión de Prospectiva Tecnológica. CONACYT-ADIAT, Acapulco Gro. Abril, 2003
71. XV Congreso HADITA organizado por la Asociación Mexicana de Directivos de la Investigación Aplicada y el Desarrollo Tecnológico A.C., Abril 2003, Acapulco, México.
72. CONIELECOMP 2003, Universidad de las Americas-Puebla., Febrero 24-26, 2003. Puebla, México.
73. Toma de Protesta de Capítulo Estudiantil de la Asociación Mexicana de Mecatrónica A.C. organizada por el Instituto Tecnológico de Minatitlán. Conferencia magistral: Innovaciones Mecatrónicas. Diciembre 7, 2002. Minatitlán-Veracruz, México.
74. XXXV Aniversario del ITQ. Instituto Tecnológico de Querétaro-DGIT. Conferencia: Panorama de la Mecatrónica, Noviembre 2002, Querétaro, México.
75. VII Reunión Internacional de Ingeniería Mecánica organizada por el Instituto Tecnológico de San Luis Potosí. Noviembre 2002, San Luis Potosí, México.
76. Desayuno-Conferencia organizado por la CANACINTRA QUERETARO, Conferencia: Perspectivas de Desarrollo del Tecnólogo en Mecatrónica. Octubre 2002, Querétaro, México.
77. II Simposium Nacional de Electrónica-Electromecánica organizado por el Instituto Tecnológico de lo Mochis. Octubre 2002, Los Mochis-Sinaloa, México.

Dr. José Emilio Vargas Soto, [email protected]
78. 4to. Congreso Mexicano de Robótica, organizado por la Asociación Mexicana de Robótica A.C., conferencia: Robot Movil Orientado a Inspección no Destructiva en Tanques Ferromagnéticos. Octubre 2002, Cd. de México, México.
79. II Simposium Internacional de Mecatrónica, organizado por el Instituto Tecnológico de Saltillo, ASME e IEEE. Octubre 2002, Saltillo, México.
80. 6° aniversario de UPIITA y 6° Semana de la Ingeniería, “Innovaciones Mecatrónicas”, Unidad Interdisciplinaria en Ingeniería y Tecnologías Avanzadas-UPIITA, Septiembre 23-27, 2002. México City.
81. 2do. Congreso Nacional de Electrónica. Organizado por la Benemérita Universidad Autónoma de Puebla. Facultad de Ciencias de la Electrónica. Conferencia plenaria: El Valor de la Tecnología Mecatrónica. Septiembre 2002, Puebla, México.
82. 3er. Congreso Internacional de Manufactura. Organizado por el CIDESI, y la Universidad Tecnológica de Querétaro. “Automatización en la Manufactura”, Septiembre 11, 2002. Querétaro, México.
83. 3er. Simposium Internacional de Robótica y Automatización. Academia Nacional de Investigación en Robótica, IEEE, Toluca, Estado de México. Agosto 2002
84. 2da. Reunión de Investigación CIDESI-Dirección General de Institutos Tecnológicos. Instituto Tecnológico de Morelia, Agosto 2002.
85. 1ra. Reunión Nacional del Diseño Curricular de la Carrera en Ingeniería Mecatrónica. Dirección General de Institutos Tecnológicos. Instituto Tecnológico de Saltillo. Mayo 2002.
86. 1er. Congreso Nacional de Mecatrónica. Organizado por el ITESM Campus Estado de México. Conferencia magistral. Abril 5, 2002.
87. 3r. Congreso Mexicano de Robótica, Asociación Mexicana de Robótica., Septiembre 2001. Querétaro, México.
88. RoboFesta 2001. 1er. Festival Internacional de Juegos de Robots. Sagamihara-Japón. Agosto 2001.
89. 2do. Congreso Nacional de Robótica, Asociación Mexicana de Robótica, Septiembre 2000. Toluca, México
90. Congreso Latinoamericano de Instrumentación y Control de Procesos, “Metodología Aplicada al Desarrollo de Máquinas Mecatrónicas”, Universidad Autónoma de Querétaro, Agosto, 2000. Querétaro, México.
91. Primer Foro Industrial de Robótica, Centro de Ingeniería y Desarrollo Industrial, Querétaro. Abril 2000. México
92. Taller de Computación e Inteligencia Artificial, IEEE sección Cuernavaca, Noviembre 1999. Morelos, México.
93. Seminario en Control de Robots, UAQ, Septiembre 1999, Querétaro, México.
94. 1er. Congreso de Robótica. Asociación Mexicana de Robótica, Septiembre 19999, Torreón, México.
95. International Congress on Industrial Automation and Material Science, UAQ, Marzo 1999, Querétaro, México.
96. 1er. Simposium Internacional de Electrónica. Conferencia: Sistemas Robóticos. ITESM Campus Querétaro. Septiembre 1998, México.
97. 3er. Concurso Nacional de Minirobótica. Conferencia: Locomoción en Robots Caminantes. Mayo 1998. Querétaro, México.
98. 3er. Congreso Nacional de Ingeniería Mecánica, Morelia, Michoacán Octubre 1997, México.
99. 5ta. Jornada Académica, Cultural y Deportiva de Ingeniería. Instituto Tecnológico de Oaxaca, Mayo 1997. México.
100. Semana de la Ingeniería. Conferencia Magistral: Automatización Industrial. Universidad Anáhuac del Sur, Noviembre 1994, México.
101. IX Congreso de Instrumentación. Sociedad Mexicana de Instrumentación, Cancún, Septiembre 1994, México.
102. Coloquio del Centro de Instrumentos. Aspectos Relevantes de la Locomoción en Robots Caminantes. CI-UNAM, Junio 1994, México.
103. Diplomado en Administración de la Tecnología. Centro para la Innovación Tecnológica-UNAM, Mayo 1994, México.
104. 3er. Congreso Internacional de Automatización y Robótica Integrada, Zaragoza, Noviembre 1993, España.
105. Conference of Locomotion in Legged Robots. Mechanical Engineering Laboratory, Tsukuba Science City. Abril 1992, Japón.
106. 4th International Symposium on Offshore, Robotics and Artificial Intelligence, Marsella, Diciembre 1991, Francia.
107. Conference of Walking Robots, McGill University, Montreal, Diciembre 1991, Canada.
108. 2do. Congreso Internacional de Robótica, Zaragoza, Noviembre 1991, España.
109. XI Curso de Automática. Sociedad Española de Informática y Automática, Peñiscola-Castellón, Junio 1991, España.
110. VI Congreso Nacional de Instrumentación. Sociedad Mexicana de Instrumentación, León, Guanajuato, Septiembre 1990, México.
111. Conference of the Robotics Society of Japan, Omiya-Saitama, Noviembre 1989, Japón.
112. International Symposium of Industrial Robots, Tokyo, Octubre 1989, Japón.
113. IEEE International Workshop on Intelligents Robots and Systems, Tsukuba Science City, Septiembre 1989, Japón.
114. Conference of the Society of Instrumentation and Control Engineering. C.S.I.C.E., Matsuyama, Julio 1989, Japón.
115. V Simposio de Instrumentación. Sociedad Mexicana de Instrumentación, Querétaro, Qro., Octubre 1988, México.
116. Seminario de alumnos de postgrado (88-II). División de Estudios de Postgrado de la Facultad de Ingeniería, UNAM. Agosto 1988, México.
117. 2do. Simposio interno del Centro de Instrumentos. Universidad Nacional Autónoma de México. Julio 1988, México.
10. PARTICIPACION EN PROGRAMAS DE RADIO Y TELEVISIÓN, ENTREVISTAS
Entrevista para noticiero SKY TV, duración: 2 minutes, Fecha: Noviembre 12, 2009.
Entrevista para la revista VISION MECATRONICA, Asociación Mexicana de Mecatrónica A.C., No. 1, Año 1. pp. 17, Mayo, 2005
Entrevista radiofónica. Programa: Opinión Pública, Conductor: Lic. Luis Ramón Almada, XEKH Radio Centro-Querétaro, 1020 AM, duración: 18h00 a 19h00, Fecha: Diciembre 20, 2004.
Entrevista para el libro: 100TIFICOS DE QUERETARO, Dirección General de Institutos Tecnológicos de Querétaro, Instituto Tecnológico de Querétaro, pp. 129-130, Junio 2003.

Dr. José Emilio Vargas Soto, [email protected]
Revista CONTENIDO. No. 469. Sección: Señoras y Señores, “Emilio Vargas. Mecatrónico”, pp. 76-79, ISSN-0188-7106, Julio 2002.
Programa: “CADA MAÑANA”, conductor: Actor Omar Fierro. TV AZTECA, Tema: Presentación del Robot Azteca, Fecha: 1 de Octubre del 2001, duración: 4 horas.
Programa: "LOS GRANDES TEMAS", Tema: La Robótica. Estación: Radio Red, Fecha: Junio 18, 1994. México D.F., duración: 2 horas.
11. DISTINCIONES Y RECONOCIMIENTOS
“International Steering Committee”, ICMT, 20th International Congress on Mechatronics Technology, Chairman: Linding Wang, Dalian, China, 28-31 October, 2016.
“Perfil PRODEP”, Subsecretaría de Educación Superior, Programa de Mejoramiento del Profesorado, M. en C. Guillermina Urbano Vidales, Directora SES, 21 de julio del 2015.
“Agradecimiento como autor de libro”, Alfaomega Grupo Editor, Lic. Luis Alejandro Herrera García, Product Manager, 30 de marzo del 2015.
“Award for Professional Excellence”, Grupoloc, Lic. Alexandro Ortiz G., Director General, 2 de mayo del 2015.
“SNI 2015”, Sistema Nacional de Investigadores Nivel 1, CONACYT. DRA. JULIA TAGÜEÑA PARGA, Septiembre 1 del 2014.
“IEEE Senior Member”, Certificate of IEEE Senior Member, Roberto De Marca, IEEE President, 1 January, 2014.
“IEEE 2014”, Certificate of IEEE Membership, Roberto De Marca, 2014 IEEE President, 1 January, 2014.
“Difusión de la Ingeniería Mecatrónica en México”, Asociación Mexicana de Mecatrónica A.C., Ing. Carlos Maceda Ramírez, Presidente, 13 de Mayo del 2013.
“Profesor Titular”, Universidad Autónoma de Querétaro, Dr. Gilberto Herrera Ruiz, Rector. 21 de junio de 2012.
“Perfil PROMEP”, Subsecretaría de Educación Superior, Programa de Mejoramiento del Profesorado, M. en C. Guillermina Urbano Vidales, Responsable de Coordinar PROMEP, 1 de junio del 2012.
“Integrante, Cuerpo Académico EN CONSOLIDACIÓN”, Subsecretaría de Educación Superior, Programa de Mejoramiento del Profesorado, M. en C. Guillermina Urbano Vidales, Responsable de Coordinar PROMEP, 15 de noviembre del 2012.
“Destacada Producción Académica 2010”, Universidad Autónoma de Querétaro, M.C. Ruth Angélica Rico Hernández Directora de la Facultad de Informática, 1 de abril del 201
“Excelente Desempeño Docente, Agosto-Diciembre 2008”, Universidad Anáhuac México Sur, Dr. Carlos Miguel Barber Kuri, Vicerrector Académico, 15 de Mayo de 2009.
“Medalla a la Excelencia en Investigación”, Universidad Anáhuac México Sur, Dr. Javier Vargas Diez Barroso, Rector, Agosto 27, 2008,
“Best Paper Award”, The 2008 Teaching and Learning Conference, Salzburg, Austria, June 23-26, 2008, Ph.D. Ronald Clute, Director / Conf. Chair, The Clute Institute, June 26, 2008.
“Evaluador externo”, Revista: Investigación y Ciencia, Universidad Autónoma de Aguascalientes, Dr. Francisco Avelar González, Director General de Investigación y Posgrado, Febrero, 2008.
“Miembro Honorario”, Asociación Peruana de Mecatrónica, Ing. Dubert Reyes Vásquez, Presidente, 28 de Febrero, 2006.
“Presidente Honorífico Internacional”, Asociación Chilena de Mecatrónica, Mario Cossio Castro, Presidente, Julio 26, 2006.
“Vocal del Consejo Académico”, Colegio de Ingenieros Civiles, Ing. Mario Luis Salazar Zuñiga, Presiente, Consejo Directivo XXXI, Junio 30, 2006.
“Miembro del Comité revisor de artículos”, CERMA 2006, IEEE, Chairman Programa Técnico, Jonathan Villanueva Tavira.
“Miembro del Padrón de Tutores”, División de Estudios de Postgrado, Facultad de Ingeniería-UNAM, Dr. Wilfrido Rivera Gómez Franco, Octubre 14, 2004.
“Visitante Distinguido de la Ciudad de Catacaos”, Corregidor de Catacaos, Piura, Perú. 2004.
“Reviewer of Technical and Scientific Articles”, International Journal on Mechatronics, Dr. Alba De Giovanni, Assistant Co Editor in Chief, March, 2004.
“Miembro S.N.I como Candidato”, Expediente 26438, CONACYT, 2002.
“Asesor Invitado”, Reunión Nacional de Diseño Curricular de la Carrera en Ingeniería Mecatrónica, DGIT de la SEP, Saltillo, Coah., Mayo 2002.
“Presidente y Miembro Fundador”, IEEE Sección Querétaro, Querétaro, Qro. Febrero del 2002, “Asociación Mexicana de Mecatrónica A.C.”, Querétaro, Qro. Septiembre del 2001.
“Coordinador General del 3er. Congreso Mexicano de Robótica”, Asociación Mexicana de Robótica, ITESM-Querétaro, Septiembre 2001.

Dr. José Emilio Vargas Soto, [email protected]
“Coordinator of Robofesta in México”, Japanese Industrial Robot Association, 1st International Festival on Robotics, ROBOFESTA 2001, Osaka, Japón. Septiembre 2001.
“Miembro de la Academia Nacional de Mecatrónica”, Instituto Tecnológico y de Estudios Superiores de Monterrey. Dr. Jesús Eugenio García Gardea, Monterrey, 2000.
“Secretario General“, Asociación Mexicana de Robótica, A.C., Presidente: Dr. Juan Manuel Ibarra Zannatha, Torreón, Septiembre 1999.
“Miembro de Claustro Doctoral del Postgrado”, Interinstitucional en Ciencia y Tecnología, CIATEQ, Querétaro. Marzo 1998.
"Diploma de Reconocimiento de Asesor de Proyectos", Asesor de proyectos estudiantiles, Universidad Anáhuac del Sur, Dermot McCluskey, Rector, México D.F., 1995.
Miembro del Claustro Doctoral Del Postgrado en Ciencias e Ingeniería”, Facultad de Ingeniería, Universidad Anáhuac del Sur, México D.F., 1995.
"Diploma como Asesor de Proyectos", Universidad Anáhuac del Sur, Facultad de Ingeniería, Dermot McCluskey, Rector, México D.F., 1994.
“Miembro del Claustro Doctoral”, Departamento de Ingeniería Mecánica, División de Estudios de Posgrado de la Facultad de Ingeniería de la UNAM, México, 1994.
"APTO CUM LAUDE" por Unanimidad, Aprobado con laureles en el Examen Doctoral, Universidad Complutense de Madrid, Facultad de Ciencias Física, Madrid, España, Abril 1994.
"Reconocimiento a la Excelencia Académica", Universidad Nacional Autónoma de México, Dr. José Sarukhan K., Rector, México 1990.
"Congratulation of Robotics's Studies", Mechanical Engineering Laboratory, Kazuo Tani. Director of Mechanism Division, Tsukuba, Japón. Enero 1990.
"Mechanical Design of Industrial Robots", Diploma, Japan International Cooperation Agency, Tsukuba, Japón, Enero 1990.
"Mención Honorífica en Titulación", Universidad Nacional Autónoma de México, Facultad de Ingeniería, Julio 1988.
“Premio a la Excelencia Académica", AUSTROMEX, México D.F., Diciembre 1987.
![microempresarial - COBACH SONORA · 2019-01-21 · > }o]u v ] v µ }v} ]u] v } µu]u } v ]U Z_ µ ]vÀ] ] (} u À µv } o } v o}]v ] µ U (} u o µ } ] v(} o o} v ] }V u v u}u v }U](https://static.fdocuments.ec/doc/165x107/5f01cf797e708231d401261f/microempresarial-cobach-2019-01-21-ou-v-v-v-u-v-uu-v.jpg)