C A T E D R A SISTEMAS DE REPRESENTACION …ecaths1.s3.amazonaws.com/sistemasalimentos... · Los...
18
UNIVERSIDAD NACIONAL DE SANTIAGO DEL ESTERO FACULTAD DE AGRONOMIA Y AGROINDUSTRIAS INGENIERIA EN ALIMENTOS C A T E D R A SISTEMAS DE REPRESENTACION GRAFICA FASCICULO N° 3 TEMA: Nociones de perspectiva. Proyecciones axonométricas. Dimétricas. Ejes dimétricos. Procedimiento para la construcción de una proyección dimétrica. Aplicaciones. Proyecciones isométricas. Coeficiente de reducción. Norma IRAM 4540. Características. Aplicaciones Mg. Ing. Guido Alfredo Larcher Año 2012
Transcript of C A T E D R A SISTEMAS DE REPRESENTACION …ecaths1.s3.amazonaws.com/sistemasalimentos... · Los...

UNIVERSIDAD NACIONAL DE SANTIAGO DEL ESTERO
FACULTAD DE AGRONOMIA Y AGROINDUSTRIAS
INGENIERIA EN ALIMENTOS
C A T E D R A
SISTEMAS DE REPRESENTACION GRAFICA
FASCICULO N° 3
TEMA: Nociones de perspectiva. Proyecciones axonométricas. Dimétricas. Ejes
dimétricos. Procedimiento para la construcción de una proyección dimétrica. Aplicaciones.
Proyecciones isométricas. Coeficiente de reducción. Norma IRAM 4540. Características.
Aplicaciones
Mg. Ing. Guido Alfredo Larcher
Año 2012
Los distintos fascículos que componen esta obra, corresponden
a los temas que se abordan a lo largo del curso de Sistemas de
Representación Grafica de la carrera de Ingeniería en Alimentos,
y que surgieron del análisis de las necesidades que los
estudiantes tienen en el aprendizaje de este idioma de la
Ingeniería.
Los apuntes fueron realizados por el personal docente de la
cátedra con la colaboración de docentes de las cátedras de
Servicios Auxiliares y de Formulación de Proyectos, integrantes
del proyecto “Proceso de enseñanza aprendizaje de Sistemas
de Representación Grafica en Ingeniería de Alimentos.
Determinación de un procedimiento efectivo para la transmisión
del conocimiento y aplicación en asignaturas del ciclo superior
de la carrera”, todos ellos bajo la dirección y coordinación del
Ing. Guido Alfredo Larcher
Año 2012

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher
PRÓLOGO
El profesor Guido Alfredo Larcher, tuvo la enorme deferencia de recabar nuestra opinión sobre su trabajo de fascículos como guía-apoyo a la materia Sistemas de Representación Grafica, con destino al alumnado de la carrera de Ingeniería en Alimentos de la Universidad Nacional de Santiago del Estero.
Los que interactuamos en el área entendemos que siempre hay algo que decir sobre el espacio tecnológico y el presente trabajo se inscribe en esta temática. Vemos con enorme interés como la geometría y su aplicación directa en el Dibujo Técnico sigue requiriendo opiniones, reinterpretaciones y decodificaciones, que con la adecuada actualización y referenciada en el normado que le compete, ya sea este Nacional o Internacional, completa el pensamiento del espacio tecnológico actual.
La idea de generar instructivos por áreas temáticas, simplifica la tarea docente y permite que el alumnado tenga un horizonte previsible en su trayecto por el espacio curricular. Cada fascículo tiene un proceso-objetivo bien definido y se puede afirmar que cuenta con un principio y un final autocontenido, que permite que el estudiante aplique con precisión las distintas normas y sus personales soluciones ante los problemas concretos.
Como obra de guía y consulta para estudiantes de ingeniería, se suma al acervo de material necesario para poder realizar sus representaciones gráficas durante su paso universitario y un apoyo en el posterior desempeño como profesional ingeniero.
Arq. Carlos L. de VEDIA

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 1
PERSPECTIVAS
La norma IRAM 4540 plantea la representación
complementaria a la representación de vistas, de las
piezas o cuerpos que se encuentra en el espacio y
permite una mejor visualización general. A este tipo de
representación espacial se la conoce como
Perspectiva, que significa en términos de
representación grafica, mirar u observar desde un
punto de vista particular.
La representación en perspectiva mejora notablemente
la posibilidad de comprender o entender elementos
construidos con cierta complejidad o bien de difícil
interpretación, ya que desde determinadas posiciones
se pueden observar las partes más importantes de un
cuerpo.
Desde el punto de vista de Geometría Descriptiva podemos decir que es un sistema que estudia la representación de figuras espaciales en un plano por medio de proyecciones obtenidas según tres ejes y cuya característica principal es la de conservar el paralelismo entre las rectas. Este sistema es conocido como Sistema Axonométrico y se clasifica en oblicuo y ortogonal.
EL SISTEMA AXONOMÉTRICO
El sistema axonométrico tiene como base de referencia
un triedro trirrectángulo. Este triedro está formado por
tres planos que son perpendiculares entre sí.
El origen de la palabra axonometría es el idioma griego,
en el que se compone por dos vocablos Axon que
significa ejes y Metron que significa medida, es decir
medida en los ejes.
Más adelante observaremos que, de acuerdo a la
posición espacial con la que sea visualizado un cuerpo,
a cada eje le corresponderá una determinada medida.
La gran ventaja que presenta este sistema es que, en
una sola imagen puede determinarse la forma y las
medidas del objeto observado y representado y por
ello, como método es muy utilizado para el croquizado
y como forma de representación de elementos
mecánicos, despiece de maquinarias y representación
de procesos industriales.

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 2
PRINCIPIOS DE REPREPRESENTACION
Dentro de la clasificación de los sistemas de representación, el Sistema Axonometrico pertenece al sistema cilíndrico o paralelo, en el que comparte el lugar conjuntamente con el sistema acotado y el sistema de Monge.
La representación de este sistema, se basa en la
combinación de tres ejes que, reunidos en un punto de
intersección (O), siguen respectivamente la dirección
en que se consideran cada una de las dimensiones,
largo, ancho y alto, del cuerpo a representar.
Hacemos referencia a la siguiente posición del
observador que mira de manera perpendicular al plano
oblicuo, al que llamamos cuadro.
Si el punto O es también proyectado sobre el plano
oblicuo, arrastra en esta proyección a los ejes
coordenados, convirtiéndolos en lo que llamaremos de
aquí en adelante ejes axonométricos. Así:
X
Y
Z
R
P
Q
En donde:
X, Y y Z son los
Ejes Coordenados.
O es el centro de
coordenadas.
XY, YZ y ZX son los
planos coordenados
RPQ es un plano
oblicuo que se
encuentra en forma
perpendicular al ojo
de un observador.
O
O O1
Z
X
Y
Z1
Y1
X1

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 3
Aquí aparece entonces el triedro trirrectángulo
formado por tres planos que son perpendiculares
entre sí.
Ahora bien, para obtener la proyección de un cuerpo
ubicado en el espacio de ejes coordenados, en el
nuevo sistema de ejes axonometricos, se procede
como se describe a continuación.
Se parte de un cuerpo ubicado de la siguiente manera
en el sistema de ejes coordenados:
Se traza ahora un plano perpendicular al plano del
observador (cuadro) y se obtienen los ejes axonomé-
tricos por proyección.
O
O
Y
X
Z
X
Z
O
Y
O1 X1
Y1
Z1
X
Y
Z

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 4
Los ejes axonométricos son X1, Y1 y Z1, y el punto O1
es el nuevo centro de intersección. Obsérvese que, el
punto O1 se obtiene por proyección perpendicular, es
decir que su línea o rayo proyectante forma con el
plano un ángulo de 90°.
A continuación, tracemos cada uno de los vértices del
cuerpo que se encuentra en las intersección de los
planos coordenados de idéntica manera como lo
hicimos con el punto O1, es decir perpendicular al
plano que lo contiene o, lo que es lo mismo, en forma
paralela a la proyección de ese punto, y obtendremos
así la proyección del cuerpo que antes se encontraba
en el espacio, en el plano.
Esta nueva proyección del cuerpo en el sistema de
ejes axonometricos, es conocida entonces como
proyección axonométrica.
Ahora bien, los ángulos que forman los ejes
coordenados X, Y y Z con los ejes axonométricos X1,
Y1 y Z1, permiten obtener la proyección axonométrica,
ya que basta multiplicar la medida real por un
coeficiente de reducción igual al valor del coseno de
los ángulos formados entre el eje real o coordenado y
el eje axonométrico. La figura siguiente ilustra sobre el
particular.
O
O1
X
Y
Z
X1
Y1
Z1
α
β
∂

CATEDRA: SISTEMAS DE REPRESENTACION GRAFICA FASCICULO N° 4 5
Se denomina entonces Escala de Reducción, al
coeficiente que existe entre la magnitud real y la
proyectada. Así, para encontrar el valor que le
corresponde en los ejes axonometricos, a un valor real
de los ejes coordenados, basta multiplicar el valor de
los ejes coordenados (valor real) por el coseno del
ángulo que forma con los ejes proyectados.
Por ejemplo, si el valor de una medida en el eje Z es
de 4 cm y el ángulo que forma este eje con el eje
proyectado Z1, vale 46°, entonces la medida
proyectada valdrá 4 cm x cos 46°, igual a 2,78 cm, es
decir el 69,5% de su valor real.
Hecha esta demostración, corresponde ahora definir la
norma que rige para la visualización en proyección
axonométrica, de los cuerpos que se encuentran en el
espacio y son proyectados en un plano.
La Norma IRAM 4540 define tres tipos de
proyecciones axonométricas basándose en la
dimensión de los ángulos que forman entre ellos los
ejes axonometricos surgidos por proyección de los
ejes coordenados.
Las proyecciones pueden ser entonces, isométricas,
trimétricas o dimétricas, siempre que sus ángulos
sean todos iguales, todos diferentes o solo dos de
ellos iguales, respectivamente.
PROYECCION AXONOMETRICA ISOMETRICA
Se caracteriza por ser iguales los ángulos que los
ejes forman entre sí, lo cual genera que las escalas
de reducción de medidas en los ejes sean iguales.
Por eso su nombre simboliza tal concepto, iso = igual
y métrica = medida.
Como aclaración y para no confundirnos, no es que
todas las medidas usadas para su construcción sean
iguales, sino que son las mismas que le corresponde
tanto al ancho como al alto y a la profundidad.
Al ser iguales todos los ángulos formados entre los
ejes y las proyecciones de estos en el triángulo,
iguales, el coeficiente de reducción a utilizar es 0,816
que resulta de calcular el coseno de cualquiera de los
ángulos.
120° 120°
120°
α
β
∂
X
Y
Z

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 6
En el sistema isométrico: las medidas son iguales para las proyecciones en los tres ejes.
α = β = γ = 120º α + β + γ = 360º
Para entender en forma práctica, la isometría de un cuerpo cubico por ejemplo se forma haciendo girar 45° el cuerpo que se encuentra de frente a un observador y luego es inclinado hacia adelante un ángulo de 36° 16’, dando como resultado, el cuerpo que se observa en la figura y con sus medidas reducidas a un 81,6% del valor real.
OBTENCIÓN GRAFICA DE LA REDUCCIÓN EN LA
ISOMETRÍA
Para encontrar la cota reducida o medida reducida en
la construcción de una isométrica se parte de los tres
ejes separados entre sí 120°, o sea X, Y y Z.
Se traza ahora una línea horizontal AB que une los
ejes Z y X dejando siempre un margen suficiente
como para que la medida que se busca pueda ser
construida sin dificultad. Desde el centro O se traza
una línea perpendicular a AB. La intersección de
ambas líneas genera el punto N, que es exactamente
el centro de la línea AB.
Y
Z X
A B
O0
O
N
P
Q 30°
45°
90°
Cota reducida
Cota real

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 7
1:1 o escala natural.
Una de las grandes ventajas del dibujo isométrico es
que se puede realizar el dibujo de cualquier modelo
sin utilizar ninguna escala especial, ya que las líneas
paralelas a los ejes se toman en su verdadera
magnitud. Así por ejemplo, el cubo cuando lo
dibujamos en forma isométrica queda con todas sus
aristas de igual medida.
Veamos un ejemplo de representación isométrica:
Tomando como centro este punto N, se traza una
semicircunferencia que una ahora los puntos A con B.
Observamos que la línea perpendicular a AB corta a la
semicircunferencia en el punto O0, quedando así
conformado todo el conjunto de líneas necesarias
para determinar geométricamente el valor reducido.
Así pues, medimos una línea O0P y la proyectamos
sobre el eje OX, encontrando de esta manera la
medida reducida de la línea O0P. Si tomamos una
regla y medimos la línea OQ, veremos que
corresponde al 81,6 % del valor de la línea O0P. Esto
es, si esta última vale 5 cm, la reducida valdrá 5 cm X
0,816, o sea 4,08 cm.
Resumiendo, la perspectiva isométrica generalmente
utiliza un coeficiente de reducción de 0,816 (0,82) que
se aplica para calcular la medida de visualización
respecto a la original, lo que permite, como ventaja,
obtener una representación a escala y, como
desventaja, la de no reflejar la disminución aparente
de tamaño-proporcional a la distancia- que percibe el
ojo humano.
Es allí donde aparece entonces, el dibujo isométrico
que es el que nosotros utilizaremos para realizar todo
tipo de representaciones espaciales, puesto que este
no utiliza ninguna escala de reducción sino la relación
SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 8
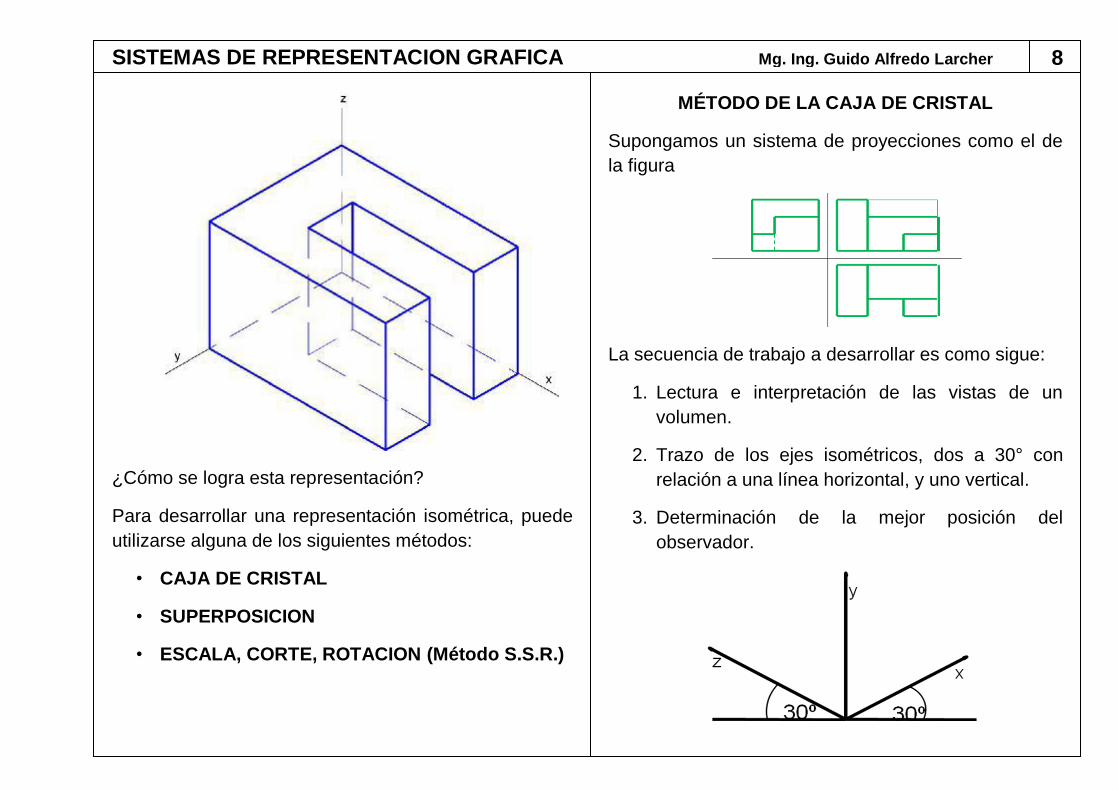
¿Cómo se logra esta representación?
Para desarrollar una representación isométrica, puede
utilizarse alguna de los siguientes métodos:
• CAJA DE CRISTAL
• SUPERPOSICION
• ESCALA, CORTE, ROTACION (Método S.S.R.)
MÉTODO DE LA CAJA DE CRISTAL
Supongamos un sistema de proyecciones como el de
la figura
La secuencia de trabajo a desarrollar es como sigue:
1. Lectura e interpretación de las vistas de un
volumen.
2. Trazo de los ejes isométricos, dos a 30° con
relación a una línea horizontal, y uno vertical.
3. Determinación de la mejor posición del
observador.

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher
9
4. Construcción del plano isométrico frontal
5. Construcción del plano isométrico superior.
6. Construcción del plano isométrico lateral.
7. Representación de las vistas del volumen.
8. Dibujar superficies paralelas al plano horizontal.
9. Dibujar superficies paralelas al plano frontal.
10. Dibujar superficies paralelas al plano lateral.
11. Dibujar trazos intensos definitivos, o sea remarcar líneas de aristas visibles.
METODO DE LA SUPERPOSICION
Consiste en:
1. Trazar ejes isométricos y un prisma que pueda
servir de referencia constructiva
2. Construir el objeto a través de la suma de
volúmenes regulares
Y por último:

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher
10
5. Para obtener el lado izquierdo del cuerpo se
siguen los pasos 1 y 2 de idéntica forma,
mientras que en el paso 3, el desplazamiento se
realiza a -30°
6. Pivotando en el vértice superior izquierdo, se
desplaza -30° hasta colocar el lado izquierdo en
posición vertical.
Se construye así la cara lateral izquierda del
cuerpo.
7. Para construir la cara lateral derecha se procede
de idéntica manera, pero utilizando
desplazamientos de 30° positivos
La figura siguiente sintetiza el proceso de
construcción total:
METODO DE LA ESCALA, CORTE, ROTACION
O METODO SSR
1. Construir un cuadrado
2. Reducir la altura del cuadrado a 86,062 % de
la real.
3. Desplazar la base superior del cuadrado, 30°
respecto de la vertical.
4. Pivotando en el vértice inferior derecho,
desplazar el cuadrado 30° desde la horizontal.
Se crea así la cara superior del cuerpo.

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 11
PROYECCION AXONOMETRICA TRIMETRICA Y
DIMETRICA
Continuando con el planteo de las proyecciones
axonométricas, abordamos ahora la trimetrica, cuya
característica principal es que los ángulos que separan
los ejes axonometricos son distintos entre sí y, por lo
tanto las medidas de cada una de las caras son
diferentes puesto que se usa en su representación,
una escala diferente para cada eje, a saber:
Sobre el eje X, el coeficiente de reducción que se
utiliza es de 0,65, en el eje Y es de 0,86 y en el eje Z
de 0,92. Esto implica que para realizar una
representación en este sistema debe aplicarse cada
uno de los coeficientes para determinar las medidas
que le corresponden a una proyección trimétrica, lo
cual lo torna dificultoso en su aplicación porque para
cada caso debe calcularse una dimensión.
Izquierdo Superior Derecho
Cuadrado
Escalar
86,062%
verticalmente
Inclinar
Rotar
120°
135°
105°
X Y
Z

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 12
Situación parecida plantea la utilización de la
representación dimétrica, aunque con un poco menos
de dificultad puesto que aquí se trata de dos ángulos
iguales y uno distinto entre ejes.
La proyección dimétrica presenta dos tipos de
construcción. La primera conocida como dimétrica
usual porque es muy utilizada en la construcción de
cuerpos o piezas que tienen planos a los que se
considera de mayor importancia que otros.
Su representación utiliza los siguientes ejes:
131° 30´ 131° 30´
X Y
Z
Si se observa, la cara de un cuerpo de mayor
importancia, sin dudas la tendría aquella que se
ubique en el plano XY puesto que estaría más cercana
a la medida real, razón por la que el coeficiente de
reducción toma el valor de 0,94 para los ejes X y Y,
mientras que para el eje Z, el valor del coeficiente de
reducción es de 0,47, o sea la mitad.
La otra proyección dimétrica conocida es la dimétrica
vertical que es muy utilizada en la construcción de
cuerpos o piezas cuya configuración es más bien
alargada.
Su representación utiliza los siguientes ejes:
Si se observa, las caras de un cuerpo que mas
alargadas podrían estar, sin dudas serían aquellas que
se ubiquen en los planos YZ y ZX y estarían más
cerca de la medida real, razón por la que el coeficiente
de reducción toma el valor de 0,73 para los ejes X y Y,
mientras que para el eje Z, el valor del coeficiente de
reducción es de 0,96, prácticamente 1.
A continuación veamos cómo se obtiene la reducción
de las cotas reales en sistemas de representación
trimétrico y dimétrico.
97°
150°
105° 105°
X Y
Z

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 13
Se parte de ejes cuyos ángulos desde luego no son de
120°, sino que representan cualquiera de las
configuraciones vistas anteriormente.
En el plano ZX trazamos una horizontal que corta a
cada uno de los ejes en los puntos B y A,
respectivamente. A continuación encontramos el punto
medio N de la horizontal. A partir de allí construimos
una semicircunferencia que une los puntos A y B.
Proyectamos O hacia O0, y a partir de O0 trazamos
líneas hacia A y hacia B. De idéntica manera trabaja-
en el plano XY y en el YZ.
De esta manera encontramos las cotas reducidas en cada uno de los ejes axonometricos, partiendo de cotas reales.
¿CÓMO SE CONSTRUYE UNA DIMETRICA Y UNA ISOMETRICA?
de 1 para los ejes X y Y y de ½ para el eje Z.
En primer lugar giramos el sistema de ejes de manera que Y tome la posición de Z, es decir quede en posición vertical
131° 30´ 131° 30´
X Y
Z
N X
Y
Z
N
O
O0
O0
B A
C
Cota real
Cotas
reducidas
Cota real Cota real
97°
La construcción de ejes
dimétricos como los que se
indican, nos permite
generar un proceso de
construcción utilizando
como valores de
representación coeficientes
97°
131° 30’
131° 30’ X
Y
Z

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher
14
Si trazamos una línea horizontal que pase por el
centro de intersección de los tres ejes y elevamos el
eje vertical, obtenemos la forma práctica de construir
una dimetrica, puesto que el eje X esta 7° por arriba
de la horizontal y el eje Z se encuentra a 41° 30’ de la
horizontal, aproximadamente 42°.
Así, en la práctica, se traza en primer lugar una
vertical y una horizontal y, desde su intersección para
uno u otro lado un eje de 7° y otro de 42°.
Sobre la vertical se coloca la verdadera magnitud o
verdadero tamaño y representa la altura del cuerpo, en
el eje de 7° se coloca la verdadera magnitud y puede
representar el ancho o la profundidad del cuerpo y
sobre el eje de 42° se coloca la mitad de la verdadera
magnitud ya que el coeficiente de reducción es igual a
½ y puede representar la profundidad o el ancho del
cuerpo según se haya tomado en la línea de 7°.
En el caso de la isométrica, ya se explico que los
valores en los ejes se toman en verdadera magnitud y
representan el alto, el ancho y la profundidad de un
cuerpo, y los ejes se toman como sigue.
Se trazan una vertical y una horizontal y, a partir de la
intersección se trazan ejes a 30° y de -30° respecto de
la horizontal. La figura ilustra el procedimiento.
Para comparar, supongamos que, sobre la base de los
conceptos vertidos, queremos representar un cubo en
el sistema dimétrico y el mismo cubo en un sistema
isométrico.
Para el primer caso trazamos los ejes indicados con la
orientación que elijamos, es decir 7° a la derecha y
42° a la izquierda y mantenemos la regla de
construcción que establece que sobre la vertical y
sobre el eje de 7° se coloca la verdadera magnitud de
la arista del cubo a representar y, a 42°, la mitad de
ese valor. Así:
V
42°
7°
30° -30°

SISTEMAS DE REPRESENTACION GRAFICA Mg. Ing. Guido Alfredo Larcher 15
Para el segundo caso trazamos los ejes indicados con
la orientación de -30° a la derecha y 30° a la izquierda,
respecto de la horizontal y mantenemos la regla de
construcción que establece que sobre la vertical y
sobre ambos ejes de 30° se coloca la verdadera
magnitud de la arista del cubo a representar. Así:
BIBLIOGRAFIA
Apuntes sobre Axonometrías de la
Universidad de Castila – La Mancha – Año
1996
Fundamentos de la Representación Grafica –
Universidad de Sevilla – Año 2002.
Norma IRAM 4540 – DIBUJO TECNICO –
Representación de vistas en perspectivas –
Año 1981.
Apuntes de DIBUJO ISOMETRICO – Arq. Mgs.
Néstor E. FERIA – Año 2005
Dimétrica
Isométrica