Bias-Compensation Based Method for Errors-In-Variables ...
6
Bias-compensation based method for errors-in-variables model identification Masato Ikenoue * Shunshoku Kanae ** Zi-Jiang Yang ** Kiyoshi Wada ** * Department of Electrical Engineering, Ariake National College of Technology, 150, Higashihagio-machi, Omuta, Fukuoka 836-8585, Japan, (e-mail: [email protected]). ** Department of Electrical and Electronic System Engineering, Kyushu University, 744, Motooka, Nishi-ku, Fukuoka 819-0395, Japan, (e-mail: {jin, yoh, wada}@ees.kyushu-u.ac.jp). Abstract: It is well known that least-squares (LS) method gives biased parameter estimates when the input and output measurements are corrupted by noise. One possible approach for solving this bias problem is the bias-compensation based method such as the bias-compensated least-squares (BCLS) method. In this paper, a new bias-compnesation based method is proposed for identification of noisy input-output system. The proposed method is based on compensation of asymptotic bias on the instrumental variables type (IV-type) estimates by making use of noise covariances estimates. In order to obtain the noise covariances estimates, an overdetermined system of equations is introduced, and the noise covariances estimation algorithm is derived by solving this overdetermined system of equations. From the combination of the parameter estimation algorithm and the noise covariances estimation algorithm, the proposed bias- compensated instrumental variables type (BCIV-type) method can be established. The results of a simulated example indicate that the proposed algorithm provides good estimates. Keywords: Estimation; Identification; Errors-In-Variables Model 1. INTRODUCTION Recently, consistent estimation methods for identification of linear discrete-time system in the presence of input and output noises, which is usually called “errors-in- variables” (EIV) model, have received much attention because of its important applications in signal processing, communications and control systems. Several methods have been proposed to estimate unknown parameters of EIV model. Joint Output (JO) method (S¨ oderstr¨ om [1981]) and Koopmans-Levin (KL) method (Fernando and Nicholson [1985]) require a priori knowl- edge about the values of variances or the ratio to mea- surements noises. Bias-compensated least-squares (BCLS) method is pro- posed by Sagara et al. (Sagara and Wada [1977]) and it has been extended by Wada et al. (Wada et al. [1990]) to the input-output noise case without any a priori knowledge of noise variances. BCLS method based on compensation of asymptotic bias on the least-squares (LS) estimates by making use of noise variances estimates is very efficient method for estimation of noisy input-output system pa- rameters. In recent years, BCLS method has been de- veloped to improve the estimation accuracy and several recursive algorithms have been proposed (Jia et al. [2001], Ikenoue et al. [2005]). On the other hand, another method named bias-eliminated least-squares (BELS) method has been proposed by Zheng et al. (Zheng and Feng [1989]) in which the different estimation method of asymptotic bias is used and further developed to be the efficient method (Zheng [1999, 2002]) to treat bias problem in noisy input-output system iden- tification. In this paper, a new bias-compnesation based method is proposed for identification of EIV model in the case where the input and output measurements are corrupted by colored noise. The proposed method is based on com- pensation of asymptotic bias on the instrumental vari- ables type (IV-type) estimates by making use of noise covariances estimates. In order to obtain the noise covari- ances estimates, an overdetermined system of equations is introduced, and the noise covariances estimation algo- rithm is derived by solving this overdetermined system of equations. From the combination of the parameter es- timation algorithm and the noise covariances estimation algorithm, the proposed bias-compensated instrumental variables type (BCIV-type) method can be established. The results of a simulated example indicate that the pro- posed algorithm provides good estimates. This paper is organized as follows. In section 2, the prob- lem statement is presented and the BCLS method is de- scribed. In section 3, the IV-type estimator is introduced and the BCIV-type estimator is derived for estimating un- known parameters of EIV model and it can be learned that the unknown noise covariances must be estimated in order to obtain consistent estimates of parameters. In section 4, the noise covariances estimation algorithm is derived by Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 2008 978-1-1234-7890-2/08/$20.00 © 2008 IFAC 1360 10.3182/20080706-5-KR-1001.2695
Transcript of Bias-Compensation Based Method for Errors-In-Variables ...

Bias-compensation based method forerrors-in-variables model identification
Masato Ikenoue ∗ Shunshoku Kanae ∗∗ Zi-Jiang Yang ∗∗Kiyoshi Wada ∗∗
∗Department of Electrical Engineering, Ariake National College ofTechnology, 150, Higashihagio-machi, Omuta, Fukuoka 836-8585,
Japan, (e-mail: [email protected]).∗∗Department of Electrical and Electronic System Engineering,
Kyushu University, 744, Motooka, Nishi-ku, Fukuoka 819-0395, Japan,(e-mail: {jin, yoh, wada}@ees.kyushu-u.ac.jp).
Abstract: It is well known that least-squares (LS) method gives biased parameter estimateswhen the input and output measurements are corrupted by noise. One possible approach forsolving this bias problem is the bias-compensation based method such as the bias-compensatedleast-squares (BCLS) method. In this paper, a new bias-compnesation based method is proposedfor identification of noisy input-output system. The proposed method is based on compensationof asymptotic bias on the instrumental variables type (IV-type) estimates by making use of noisecovariances estimates. In order to obtain the noise covariances estimates, an overdeterminedsystem of equations is introduced, and the noise covariances estimation algorithm is derivedby solving this overdetermined system of equations. From the combination of the parameterestimation algorithm and the noise covariances estimation algorithm, the proposed bias-compensated instrumental variables type (BCIV-type) method can be established. The resultsof a simulated example indicate that the proposed algorithm provides good estimates.
Keywords: Estimation; Identification; Errors-In-Variables Model
1. INTRODUCTION
Recently, consistent estimation methods for identificationof linear discrete-time system in the presence of inputand output noises, which is usually called “errors-in-variables” (EIV) model, have received much attentionbecause of its important applications in signal processing,communications and control systems.
Several methods have been proposed to estimate unknownparameters of EIV model. Joint Output (JO) method(Soderstrom [1981]) and Koopmans-Levin (KL) method(Fernando and Nicholson [1985]) require a priori knowl-edge about the values of variances or the ratio to mea-surements noises.
Bias-compensated least-squares (BCLS) method is pro-posed by Sagara et al. (Sagara and Wada [1977]) and it hasbeen extended by Wada et al. (Wada et al. [1990]) to theinput-output noise case without any a priori knowledgeof noise variances. BCLS method based on compensationof asymptotic bias on the least-squares (LS) estimates bymaking use of noise variances estimates is very efficientmethod for estimation of noisy input-output system pa-rameters. In recent years, BCLS method has been de-veloped to improve the estimation accuracy and severalrecursive algorithms have been proposed (Jia et al. [2001],Ikenoue et al. [2005]).
On the other hand, another method named bias-eliminatedleast-squares (BELS) method has been proposed by Zheng
et al. (Zheng and Feng [1989]) in which the differentestimation method of asymptotic bias is used and furtherdeveloped to be the efficient method (Zheng [1999, 2002])to treat bias problem in noisy input-output system iden-tification.
In this paper, a new bias-compnesation based methodis proposed for identification of EIV model in the casewhere the input and output measurements are corruptedby colored noise. The proposed method is based on com-pensation of asymptotic bias on the instrumental vari-ables type (IV-type) estimates by making use of noisecovariances estimates. In order to obtain the noise covari-ances estimates, an overdetermined system of equationsis introduced, and the noise covariances estimation algo-rithm is derived by solving this overdetermined systemof equations. From the combination of the parameter es-timation algorithm and the noise covariances estimationalgorithm, the proposed bias-compensated instrumentalvariables type (BCIV-type) method can be established.The results of a simulated example indicate that the pro-posed algorithm provides good estimates.
This paper is organized as follows. In section 2, the prob-lem statement is presented and the BCLS method is de-scribed. In section 3, the IV-type estimator is introducedand the BCIV-type estimator is derived for estimating un-known parameters of EIV model and it can be learned thatthe unknown noise covariances must be estimated in orderto obtain consistent estimates of parameters. In section 4,the noise covariances estimation algorithm is derived by
Proceedings of the 17th World CongressThe International Federation of Automatic ControlSeoul, Korea, July 6-11, 2008
978-1-1234-7890-2/08/$20.00 © 2008 IFAC 1360 10.3182/20080706-5-KR-1001.2695

solving the overdetermined system of equations, and theBCIV-type method is established. Moreover, the recursiveBCIV-type algorithm is described. The simulation resultsare presented in section 5 and finally section 6 gives theconclusion.
2. PROBLEM STATEMENT
Consider the parameter estimation problem of single-input single-output linear discrete-time system describedas follows:
A(q−1)yt = B(q−1)ut (1)
where ut and yt are the true input and output, q−1 is shiftoperator, q−1ut = ut−1, and the polynomials A(q−1) andB(q−1) are defined by
A(q−1) = 1 + a1q−1 + · · ·+ anq−n (2)
B(q−1) = b1q−1 + · · ·+ bnq−n . (3)
It is assumed that A(z) has all zeros outside the unitcircle and A(z) and B(z) have no common factors. Letzt and wt be the noise-corrupted measurements of yt andut, respectively, i.e.
zt = yt + et, wt = ut + dt (4)where et is the output measurement noise and dt is theinput measurement noise. The measurement noises et
and dt are assumed to be zero-mean colored noise withunknown covariances
ree(k) = E[etet−k], (k = 0, ± 1, ± 2, · · · ) (5)rdd(k) = E[dtdt−k], (k = 0, ± 1, ± 2, · · · ) (6)
and described aset = He(q−1)ωe,t (7)dt = Hd(q−1)ωd,t (8)
where E[·] stands for mathematical expectation, ωe,t andωd,t are zero-mean white noises with unknown variancesσ2
ωeand σ2
ωd, and He(q−1), Hd(q−1) take up any form
of rational function. The true input ut is a zero-meanstationary random process with finite variance, and ut,dt and et are assumed to be statistically independent ofeach other.
Substituting (4) into (1) yields
A(q−1)zt = B(q−1)wt + vt (9)where vt is a composite noise defined by
vt = A(q−1)et −B(q−1)dt . (10)Define some vectors as
θT = [aT , bT ] = [a1 · · · an, b1 · · · bn] (11)pT
t = [−zTt , wT
t ]= [−zt−1 · · · − zt−n, wt−1 · · ·wt−n] (12)
qTt = [−yT
t , uTt ]
= [−yt−1 · · · − yt−n, ut−1 · · ·ut−n] (13)
rTt = [−eT
t , dTt ]
= [−et−1 · · · − et−n, dt−1 · · · dt−n] (14)then (4), (9) and (10) can be written as
pt = qt + rt (15)zt = pT
t θ + vt (16)vt = et − rT
t θ . (17)
Let the equation error ξt for an estimate θ of θ be definedas
ξt = A(q−1)zt − B(q−1)wt = zt − pTt θ (18)
where the polynomials A(q−1) and B(q−1) are defined by
A(q−1) = 1 + a1q−1 + · · ·+ anq−n (19)
B(q−1) = b1q−1 + · · ·+ bnq−n (20)
and
θT
= [aT , bT] = [a1 · · · an, b1 · · · bn] . (21)
Minimizing the sum of squared equation error ξt yields theleast-squares (LS) estimate of θ
θLS,N = R−1
pp,N rpz,N (22)where
Rpp,N =1N
N∑t=1
ptpTt (23)
rpz,N =1N
N∑t=1
ptzt . (24)
From the assumption of et and dt, the composite noise vt
defined by (10) is not white. Hence the LS estimate θLS,N
has a bias asymptotically. The asymptotic result of the LSestimate θLS,N is obtained as
θLS = θ −R−1pp Qγ (25)
whereθLS = lim
N→∞θLS,N = R−1
pp rpz (26)
Rpp = limN→∞
Rpp,N = E[ptpTt ] (27)
rpz = limN→∞
rpz,N = E[ptzt] (28)
Q =[Q1 + Q2
Q3
](29)
Q1 =aiT1 +
n−1∑
j=1
[(Sn)j +(ST
n )j]aiT
j+1 (30)
Q2 = [0n In On] (31)
Q3 =biTn+2+
n−1∑
j=1
[(Sn)j +(ST
n )j]biT
j+n+2 (32)
ij = I2n+1(:, j) (j = 1, · · · , 2n + 1) (33)
Sn =[0T
n−1 0In−1 0n−1
](34)
γ = [ree(0), · · · , ree(n), rdd(0), · · · , rdd(n−1)]T (35)In is an n×n identity matrix, On is an n×n zero matrixand 0n is an n× 1 zero vector.
One possible approach for solving this bias problem isthe bias-compensation principle based method such as thebias-compensated least-squares (BCLS) method (Wadaet al. [1990], Jia et al. [2001], Ikenoue et al. [2005]) andthe bias-eliminated least-squares (BELS) method (Zhengand Feng [1989], Zheng [1999, 2002]). From (25), it can beexpected that a consistent estimate of θ can be obtained bycompensating for the asymptotic bias in the LS estimateθLS,N . Hence the BCLS estimate θBCLS,N is given byfollowing equation.
θBCLS,N = θLS,N + R−1
pp,NQBCLS,N−1γN (36)
17th IFAC World Congress (IFAC'08)Seoul, Korea, July 6-11, 2008
1361

where γN denotes the estimate of γ at time instant N ,and QBCLS,N denotes the estimate of Q whose elementsare composed of the BCLS estimate θBCLS,N .
If the noise covariance vector γ is known, the consistentestimate for noisy input-output system can be obtained via(36) simply. But in more general case, the noise covariancesare unknown, it is necessary to estimate them firstly. Thenoise covariances estimation algorithm has been proposedfor the case where the input noise is white noise and theoutput noise is colored noise (Zheng [2002]), and severalalgorithms have been proposed for the case where theinput and output measurements are corrupted by whitenoise (Wada et al. [1990], Jia et al. [2001], Zheng and Feng[1989], Zheng [1999], Ikenoue et al. [2005]).
3. INSTRUMENTAL VARIABLES TYPE ESTIMATOR
In this section, a new bias-compensation principle basedmethod is considered by using the instrumental variablestype estimator. Introduce a vector ηt of dimention m ≥2n. Now, let us consider the instrumental variables type(IV-type) estimate θIV t,N defined by the following equa-tion
1N
N∑t=1
ηt
(zt − pT
t θIV t,N
)= 0m . (37)
In general, the IV-type vector ηt has higher dimentionthan 2n, (37) gives an overdetermined system and has noexact solution. Solving (37) in a least-squares sense yields
θIV t,N =(R
T
ηp,NWRηp,N
)−1
RT
ηp,NWrηz,N (38)
where
Rηp,N =1N
N∑t=1
ηtpTt (39)
rηz,N =1N
N∑t=1
ηtzt (40)
and W is a positive definite weighting matrix (no weight-ing, that is W = Im, is one possible choice). θIV t,N existsif Rηp,N is full rank. The elements of the IV-type vectorηt can be chosen in various ways. Choosing all elementsof the IV-type vector ηt as signals uncorrelated with acomposite noise vt, then θIV t,N becomes the well-knownextended instrumental variable estimate of θ (Soderstromand Mahata [2002]). The matrix ΦN
ΦN = RT
ηp,NWRηp,N (41)may often become ill-conditioned in the case where allelements of the IV-type vector ηt are chosen as signalsuncorrelated with a composite noise vt, so it is necessaryto choose an IV-type vector ηt so that at least one elementof the vector ηt is correlated with vt and hence the matrixΦN becomes well-conditioned. However, choosing at leastone element of the vector ηt correlated with vt, then theIV-type estimate θIV t,N has a bias asymptotically.
Substituting (16) into (38) yields
θIV t,N =θ+(R
T
ηp,NWRηp,N
)−1
RT
ηp,NWrηv,N (42)
where
rηv,N =1N
N∑t=1
ηtvt . (43)
Taking limit of (42) yieldsθIV t = θ + hIV t (44)
where
θIV t = limN→∞
θIV t,N =(RT
ηpWRηp
)−1
RTηpWrηz (45)
Rηp = limN→∞
Rηp,N =E[ηtpTt ] (46)
rηz = limN→∞
rηz,N =E[ηtzt] (47)
and hIV t is the asymptotic bias of the IV-type estimateθIV t,N defined as
hIV t =(RT
ηpWRηp
)−1
RTηpWrηv (48)
whererηv = lim
N→∞rηv,N = E[ηtvt] . (49)
Using (17), rηv can be expressed as follows:rηv = E[ηtvt]
= E[ηt(et − rTt θ)]
= d− Dθ
= −Qγ (50)
where d = E[ηtet], D = E[ηtrTt ], Q is an m × p matrix
whose elements are composed of the parameter θ, and γis a p× 1 noise covariace vector. From (44), (48) and (50),the asymptotic bias hIV t can be expressed as follows:
hIV t =θIV t−θ=−(RT
ηpWRηp
)−1
RTηpWQγ . (51)
From (44), it can be expected that a consistent estimate ofθ can be obtained by compensating for the asymptotic biashIV t in the IV-type estimate θIV t,N . From (51), estimateof the asymptotic bias hIV t at time instant N becomes
hIV t,N =−(R
T
ηp,NWRηp,N
)−1
RT
ηp,NWQN−1
γN (52)
where QN and γN denote the estimates of Q and γ at time
instant N , respectively. Hence the bias compensated in-strumental variables type (BCIV-type) estimate θBCIV t,N
is given by
θBCIV t,N = θIV t,N−hIV t,N
= θIV t,N+(R
T
ηp,NWRηp,N
)−1
RT
ηp,NWQBCIV t,N−1
γN (53)
where QBCLS,N denotes the estimate of Q whose ele-
ments are composed of the BCIV-type estimate θBCIV t,N .Practically the noise covariance vector γ is unknown, it isnecessary to estimate γ.
It is possible to write the structures of d, D and Q. Forexample, assumed that the IV-type vector ηt is given by
ηt = [wTl,t+n+l, wT
t , wTl,t]
T (54)where
wl,t = [wt−n−1 · · · wt−n−l]T (55)
17th IFAC World Congress (IFAC'08)Seoul, Korea, July 6-11, 2008
1362

and m = n + 2l. Then, using the assumption of et, dt, itis easily shown that d and D become as follows:
d = E[ηtet] =
[E[wl,t+n+let]E[wtet]E[wl,tet]
]
=
[E[dl,t+n+let]E[dtet]E[dl,tet]
]=
[ 0l
0n
0l
]= 0n+2l (56)
D = E[ηtrTt ]
=
−E[wl,t+n+le
Tt ] E[wl,t+n+ld
Tt ]
−E[wteTt ] E[wtd
Tt ]
−E[wl,teTt ] E[wl,td
Tt ]
=
Ol×n E[dl,t+n+ldTt ]
On×n E[dtdTt ]
Ol×n E[dl,tdTt ]
=[O(n+2l)×n Rdd
](57)
wheredl,t = [dt−n−1 · · · dt−n−l]T (58)
Rdd =
E[dl,t+n+ldTt ]
E[dtdTt ]
E[dl,tdTt ]
=
rdd(l) rdd(l + 1) · · · rdd(n+l−1)...
.... . .
...rdd(1) rdd(2) · · · rdd(n)rdd(0) rdd(1) · · · rdd(n−1)rdd(1) rdd(0) · · · rdd(n−2)
......
. . ....
rdd(n−1) rdd(n−2) · · · rdd(0)rdd(n) rdd(n−1) · · · rdd(1)
......
. . ....
rdd(n+l−1) rdd(n+l−2) · · · rdd(l)
.
(59)
Additionally, Dθ − d can be expressed as follows:
Dθ − d =[O(n+2l)×n Rdd
] [ab
]− 0n+2l
= Rddb
= Qγ (60)
thus Q and γ becomes as follows:
Q = biT
1 +n+l−1∑
j=1
[(Sn+2l)j + (ST
n+2l)j]bi
T
j+1 (61)
b = [0Tl , bT , 0T
l ]T (62)
ij = In+l(:, j) (j = 1, · · · , n + l) (63)γ = [rdd(0), · · · , rdd(n + l − 1)]T (64)
Since the dimention of the noise covariance vector γ isp = n + l in the case where the input noise dt is colorednoise, n + l noise covariances must be estimated for theBCIV-type estimate. However, using the IV-type vectorηt given by (54), there can be avoided the necessity toestimate the output noise covariances. Thus only the inputnoise covariances are to be determined. Moreover, if theinput noise dt is white noise with unknown variance σ2
d,
the structures of (59), (61) and (64) can be written moresimply.
Rdd =
[Ol×n
σdIn
Ol×n
](65)
Q = b = [0Tl , bT , 0T
l ]T (66)γ = σ2
d . (67)If the input and output measurements are corrupted bywhite noise, it is necessary to estimate the input andoutput noise variances in the BCLS method (Wada et al.[1990], Jia et al. [2001], Zheng and Feng [1989], Zheng[1999], Ikenoue et al. [2005]). Moreover, if the input noiseis white noise and the output noise is colored noise, itis necessary to estimate the input noise variance andn + 1 output noise covariances in Zheng’s method (Zheng[2002]). On the contrary, it can be learned from (67) thatif the input noise is white noise, the BCIV-type estimaterequires only the input noise variance estimate.
Since the IV-type vector ηt defined by (54) has no causal-ity, it is necessary to set t = t− l +1 and use the followingequations instead of ηt, pt and zt in the real applications.
ηt → ηt−l+1 (68)pt → pt−l+1 (69)zt → zt−l+1 . (70)
4. BIAS-COMPENSATION METHOD FOR IV-TYPEESTIMATOR
In this section, the estimation algorithm of the noise co-variances vector γ is proposed for the BCIV-type estimate,and the BCIV-type method is derived. Multiplying (16) bythe IV-type vector ηt, and taking expectation yield
E[ηtzt] = E[ηt(pTt θ + vt)] = E[ηtp
Tt ]θ + E[ηtvt]
= E[ηtpTt ]θ − Qγ . (71)
Thus, we can obtain the following overdetermined systemof equations
rηz = Rηpθ − Qγ . (72)
Solving (72) for θ in a least-squares sense yields
θ =(RT
ηpWRηp
)−1
RTηpW
(rηz + Qγ
)
= θIV t +(RT
ηpWRηp
)−1
RTηpWQγ . (73)
Equation (73) implies that, for a given γ, the parametervector θ can be obtained by solution of overdeterminedsystem of equations (72), and replacing (73) by the esti-mates at time instant N yields the BCIV-type estimateθBCIV t,N in (53).
Moreover, solving (72) for γ in a least-squares sense yields
γ =(Q
TXQ
)−1
QTX (Rηpθ − rηz) (74)
where X is an m ×m positive definite weighting matrix.Equation (74) implies that, for a given θ, the noise covari-ances vector γ can be obtained by solution of overdeter-mined system of equations (72). Thus, by replacing (74)by the estimate at time instant N , the estimate of noisecovariances vector γ at time instant N can be obtained by
17th IFAC World Congress (IFAC'08)Seoul, Korea, July 6-11, 2008
1363

γN =(
Q
T
BCIV t,N−1XQBCIV t,N−1
)−1
×
Q
T
BCIV t,N−1X(Rηp,N θBCIV t,N−1−rηz,N
). (75)
Based on the above discussion, the bias-compensationmethod for the IV-type estimator can be established fromthe combination of the BCIV-type parameter estimationalgorithm (53) and the noise covariances estimation al-gorithm (75). To perform adaptive identification of noisyinput-output system, the following recursive BCIV-typealgorithm may be applied.
The recursive BCIV-type algorithm
Step 0: Set the initial values of the algorithm. Choose theweighting matrices W and X, the IV-type vector ηt.
Step 1: Calculate the IV-type estimate.
θIV t,N = θIV t,N−1+KN
(gT
N−ΨTN θIV t,N−1
)
wheregN =
[(N−1)rT
ηz,N−1WηN zN
]
ΨN =[
(N−1)RT
ηp,N−1WηN pN
]
KN = MN−1ΨN
(ΛN +ΨT
NMN−1ΨN
)−1
ΛN =[
0 11 ηT
NWηN
]−1
=[−ηT
NWηN 11 0
]
MN = MN−1−KNΨTNMN−1 .
Step 2: Calculate the covariance matrix and the covari-ance vector.
Rηp,N = Rηp,N−1 +1N
(ηNpT
N − Rηp,N−1
)
rηz,N = rηz,N−1 +1N
(ηNzN − rηz,N−1) .
Step 3: Calculate the noise covariances estimates.
γN =(
Q
T
BCIV t,N−1XQBCIV t,N−1
)−1
×
Q
T
BCIV t,N−1X(Rηp,N θBCIV t,N−1−rηz,N
).
Step 4: Calculate the BCIV-type estimate.
θBCIV t,N = θIV t,N+
N2MNRT
ηp,NWQBCIV t,N−1
γN .
Step 5: Set N = N + 1 and repeat from step 1 until thechosen stop criterion is satisfied.
Initial value selection: Initial values at N = 0 are givenas θIV t,0 = 02n, M0 = ρI2n (ρ is a large number),Rηp,0 = Om×2n, rηz,0 = 0m. Initial value of the BCIV-type estimate is given as θBCIV t,T = θIV t,T , (0 < T <L: L is a number for idling).
5. SIMULATION RESULTS
5.1 The case where the input noise and the output noiseare colored noise
Computer simulation which compares the proposed BCIV-type algorithm with the LS algorithm has been carried out.Consider the following second-order system:
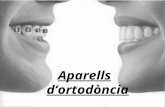
0 2000 4000 6000 8000 10000
10-30
10-20
10-10
100
N
RMSE of parameter estimate: section 5.1
RMSE (dB)
LS algorithm BCIV-type (l=3)
BCIV-type (l=4)
BCIV-type (l=5)
Fig. 1. RMSE of parameter estimates (section 5.1).
Table 1. Mean values, standard deviations ofestimates for N = 10000 (section 5.1).
True valueLS
algorithmBCIV-type
(l = 3)BCIV-type
(l = 4)BCIV-type
(l = 5)
a1 = −1.5−0.7046±0.0162
−1.5130±0.0934
−1.5004±0.0159
−1.5000±0.0122
a2 = 0.70.0567
±0.01330.7121
±0.08600.7004
±0.01200.7001
±0.0085
b1 = 1.00.9997
±0.03260.9936
±0.07340.9950
±0.02850.9971
±0.0313
b2 = 0.51.9223
±0.04210.4726
±0.15750.4952
±0.05480.4969
±0.0518
B(q−1)A(q−1)
=1.0q−1 + 0.5q−2
1− 1.5q−1 + 0.7q−2. (76)
The noise free input ut is assumed to be generated asut = 0.9ut−1 + εt where εt is a zero-mean white noise withunit variance. The colored output noise et is assumed to begenerated as et = −0.8et−1 + ωe,t + 0.3ωe,t−1 where ωe,t
is a zero-mean white noise with variance σ2ω,e = 1.8898,
which yields SNR = 10 log10(E[y2t ]/E[e2
t ]) = 20 [dB].The colored input noise dt is assumed to be generatedas dt = 0.6dt−1 + ωd,t + 0.2ωd,t−1 where ωd,t is a zero-mean white noise with variance σ2
ω,d = 0.0263, whichyields SNR = 10 log10(E[u2
t ]/E[d2t ]) = 20 [dB]. The IV-
type vector ηt is chosen as in (54). In particular, the casesof l = 3, 4, 5, which yield m = 8, 10, 12 respectively, areexamined. Weighting matrices are chosen as W = Im andX = Im. Computer simulation for comparison is carriedout through M = 100 independent runs with a data lengthof 10000. Fig. 1 gives a plot of the root mean squared error(RMSE) which is defined by
RMSE = 20 log10
√√√√ 1M
M∑
k=1
‖θk,t − θ‖2‖θ‖2 [dB] (77)
where θk,t denotes the estimate of θ at time step t in thekth independent run. Table 1 provides the mean values,the standard deviations of estimates for N = 10000.
Simulation results indicate that the LS method givesbiased results. On the contrary, the proposed BCIV-type method can give consistent estimate. Especially, theresulting BCIV-type estimates in the cases of l = 4, 5 aremore accurate than those obtained with l = 3.
17th IFAC World Congress (IFAC'08)Seoul, Korea, July 6-11, 2008
1364

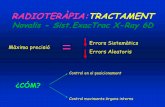
0 2000 4000 6000 8000 1000010
-30
10-20
10-10
100
N
RMSE of parameter estimate: section 5.2
RMSE (dB)
LS algorithm
Zheng's algorithm
BCIV-type algorithm
Fig. 2. RMSE of parameter estimates (section 5.2).
Table 2. Mean values, standard deviations ofestimates for N = 10000 (section 5.2).
True valueLS
algorithmZheng’s
algorithmBCIV-typealgorithm
a1 = −1.5752−0.5332±0.0080
−1.5369±0.0622
−1.5518±0.0572
a2 = 0.6065−0.4009±0.0080
0.5658±0.0651
0.5791±0.0674
b1 = 0.16990.1806
±0.00590.1601
±0.04010.1645
±0.0315
b2 = 0.14380.2163
±0.00590.1391
±0.03950.1411
±0.0286
5.2 The case where the input noise is white noise and theoutput noise is colored noise
By computer simulation, the proposed BCIV-type algo-rithm is compared with the LS algorithm and Zheng’salgorithm (Zheng [2002]). Consider the folowing second-order system:
B(q−1)A(q−1)
=0.169901q−1 + 0.143831q−2
1− 1.575157q−1 + 0.606531q−2. (78)
The noise free input ut is assumed to be generated asut = εt − 0.3εt−1 + 0.5εt−2 − 0.7εt−3 + 0.9εt−4 where εt
is a zero-mean white noise with variance 1/(1 + 0.32 +0.52 + 0.72 + 0.92) = 0.3788. The colored output noise et
is assumed to be generated as et = et−1− 0.4et−1 + ωe,t−0.87ωe,t−1 + 0.57ωe,t−2 where ωe,t is a zero-mean whitenoise with variance σ2
ω,e = 0.2264, which yields SNR =10 log10(E[y2
t ]/E[e2t ]) = 10 [dB]. The noise variance of
white input noise dt is set as σ2d = 0.1 which yields
SNR = 10 log10(E[u2t ]/E[d2
t ]) = 10 [dB]. The IV-typevector ηt is chosen as in (54), where l = 4 which yieldsm = 10. Weighting matrices are chosen as W = Im andX = Im. Computer simulation for comparison is carriedout through M = 100 independent runs with a data lengthof 10000. Fig. 2 gives a plot of the RMSE which is definedby (77). Table 2 provides the mean values, the standarddeviations of estimates for N = 10000.
Simulation results indicate that the LS method gives bi-ased results. On the contrary, the Zheng’s method and theproposed BCIV-type method can give consistent estimate.Though the BCIV-type method requires only the inputnoise variance estimate, the resulting parameter estimates
obtained by the BCIV-type method is more accurate thanthose obtained by the Zheng’s method.
6. CONCLUSIONS
In this paper, the method of consistent estimation ofnoisy input-output system has been studied. A new bias-compensation based method has been proposed for EIVmodel identification. The proposed BCIV-type methodconsists of the parameter estimation algorithm which isbased on compensation of asymptotic bias on the IV-typeestimates, and the noise covariances estimation algorithmwhich is based on an overdetermined system of equations.The proposed method can treat not only the white input-output noise case but also the colored input-output noisecase. It is demonstrated that the proposed method cangive consistent parameter estimate via simulation results.
ACKNOWLEDGEMENTS
This work was partially supported by the Ministry of Ed-ucation, Culture, Sports, Science and Technology of Japanunder Grant-in-Aid for Young Scientists (B) 19760297.
REFERENCES
K. V. Fernando and H. Nicholson. Identification of linearsystems with input and output noise: the koopmans-levin method. IEE Proc. Control Theory and Applica-tions, 132:30–36, 1985.
M. Ikenoue, S. Kanae, Z. J. Yang, and K. Wada. Iden-tification of noisy input-output system using bias-compensated least-squares method. Preprints of the16th IFAC World Congress, Prague, Czech Republic,2005.
L. J. Jia, M. Ikenoue, C. Z. Jin, and K. Wada. Onbias compensated least squares method for noisy input-output system identification. Proc. of 40th IEEE Conf.on Decision and Control, pages 3332–3337, 2001.
S. Sagara and K. Wada. On-line modified least-squares pa-rameter estimation on linear discrete dynamic systems.Int. J. Control, 25(3):329–343, 1977.
T. Soderstrom. Identification of stochastic linear systemsin presence of input noise. Automatica, 17(5):713–725,1981.
T. Soderstrom and K. Mahata. On instrumental variableand total least squares approachs for identification ofnoisy systems. Int. J. Control, 75(6):381–389, 2002.
K. Wada, M. Eguchi, and S. Sagara. Estimation of pulsetransfer function via bias-compensated least-squaresmethod in the presence of input and output noise. Sys-tems Science, 16(3):57–70, 1990.
W. X. Zheng. On least-squares identification of stochasticlinear systems with noisy input-output data. Int. J.Adaptive Control and Signal Processing, 13:131–143,1999.
W. X. Zheng. A bias correction method for identification oflinear synamic errors-in-variables models. IEEE Trans.Autmatic Control, 47(7):1142–1147, 2002.
W. X. Zheng and C. B. Feng. Unbiased estimation of linearsystems in the presence of input and output noise. Int.J. Adaptive Control and Signal Processing, 3:231–251,1989.
17th IFAC World Congress (IFAC'08)Seoul, Korea, July 6-11, 2008
1365