Aproximaci´on simpl´ectica a la mec´anica lagrangianaschaposnik/Research...Definici´on 2.1.3....
64
UNIVERSIDAD NACIONAL DE LA PLATA FACULTAD DE CIENCIAS EXACTAS Departamento de Matem´atica TRABAJO DE INICIACI ´ ON A LA INVESTIGACI ´ ON Aproximaci´onsimpl´ ectica a la mec´ anica lagrangiana Laura Patricia Schaposnik Massolo Director: Prof. Jorge E. Solomin 2008
Transcript of Aproximaci´on simpl´ectica a la mec´anica lagrangianaschaposnik/Research...Definici´on 2.1.3....

UNIVERSIDAD NACIONAL DE LA PLATA
FACULTAD DE CIENCIAS EXACTAS
Departamento de Matematica
TRABAJO DE INICIACION A LA INVESTIGACION
Aproximacion simplectica a la mecanica
lagrangiana
Laura Patricia Schaposnik Massolo
Director: Prof. Jorge E. Solomin
2008

a mi madre.

Quiero agradecerle...
... a mi padre, a mi hermano y a Clau, por el carino y apoyo que me dieron
durante todos estos anos. Por no dejar que cayera ni en los momentos mas
difıciles.
... al Solo, quien desperto en mi el gusto por la matematica y me inicio en
este camino que recien comienza.
... a las amigas y los amigos que me acompanaron durante estos ultimos
anos de estudio... y a las amiguitas que estuvieron a mi lado casi desde que
nacı.
... a Martın, por su complicidad y su comprension. Por todos aquellos anos
hermosos que pasamos juntos.

Indice general
1. Introduccion 1
2. Resena geometrica 3
2.1. Variedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1. Mapas entre variedades . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.2. Fibrado tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.3. Campos vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.4. Fibrado cotangente . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.5. Formas diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2. Geometrıa simplectica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1. Variedades simplecticas . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.2. Campos Hamiltonianos . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.3. Corchete de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3. Mecanica lagrangiana 16
3.1. Sistemas lagrangianos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1. Transformada Legendre . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.2. Formas lagrangianas . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.3. Funcion de Energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.4. Campos especiales . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.5. Vectores y campos verticales . . . . . . . . . . . . . . . . . . . . . . 21
3.2.6. Campos, formas y funciones horizontales . . . . . . . . . . . . . . . 22
3.3. Principio de D’Alembert . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4. Sistemas mecanicos con vınculos 24
4.1. Sistemas mecanicos holonomos . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.1.1. Ejemeplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2. Sistemas mecanicos no holonomos . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3. Desplazamientos virtuales . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5. Formulacion lagrangiana de sistemas no holonomos clasicos 35
5.1. Marco geometrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.1.1. Principio de los trabajos virtuales . . . . . . . . . . . . . . . . . . . 37
i

5.1.2. Proyecciones M-ortognales . . . . . . . . . . . . . . . . . . . . . . . 38
5.2. Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . . 39
5.3. Principio de Gauss de mınima accion . . . . . . . . . . . . . . . . . . . . . 42
5.4. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6. Formulacion lagrangiana de sistemas mecanicos no holonomos genera-
lizados 46
6.1. Marco geometrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.1.1. Proyecciones M-ortognales . . . . . . . . . . . . . . . . . . . . . . . 46
6.2. Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . . 47
6.3. Principio de Gauss de mınima accion generalizado . . . . . . . . . . . . . . 51
6.4. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
ii

Capıtulo 1
Introduccion
La mecanica lagrangiana estudia sistemas mecanicos descriptos por ciertas funciones
definidas sobre el espacio tangente a la variedad de configuracion del sistema. Muchos
resultados de la mecanica clasica pueden ser vistos en terminos geometricos sobre el es-
pacio tangente. En las publicaciones de L.D. Faddeev y A.M. Vershik [18], [17] pueden
encontrarse los primeros trabajos donde se traduce al lenguage simplectico la mecanica
Lagrangiana. A partir de entonces, son muchos los autores que se han dedicado a in-
vestigar en este area. En este marco, es la intencion de esta tesis estudiar los sitemas
lagrangianos no holonomos clasicos y generalizados desde un punto de vista geometrico y
establecer las principales diferencias entre ellos.
En primer lugar, se estudiara el punto de partida del analisis geometrico de la mecanica
lagrangiana. Para ello, en el Capıtulo 2 presentaremos la base geometrica utilizada L.D.
Faddeev y A.M. Vershik en sus trabajos.
En el Capıtulo 3 introduciremos los sistemas lagrangianos. Comenzaremos con al-
gunas ideas basicas (vease, entre otros, [12] o [13]) para luego describir ciertos objetos
geometricos ıntimamente relacionados con la mecanica en cuestion.
En el Capıtulo 4 presentaremos dos tipos de sistemas mecanicos con vınculos (vease,
por ejemplo, [5] ): los holonomos y los no holonomos , y a su vez explicaremos la nocion
de desplazamientos virtuales [15]. Veremos en este capıtulo algunos ejemplos de sistemas
con vınculos [7], [1].
Dedicaremos el Capıtulo 5 al estudio de sistemas lagrangianos no holonomos clasicos.
Presentaremos aquı algunos resultados, como el principio de Gauss de mınima accion y
la existencia y unicidad de la solucion, desde una perspectiva geometrica. Entre otros
trabajos, se pueden encontrar como referencia las publicaciones de F.E. Udwadia [16], de
M. Gotay y J. Nes.ter [8] y de J.E. Solomin y M. Zucalli [15].
1

Finalmente, en el Capıtulo 6 estudiaremos sistemas no holonomos generalizados y los
compararemos con los sistemas no holonomos clasicos, discutiendo los resultados analo-
gos a los estudiados en el capıtulo anterior, pero con esta nueva clase de restricciones.
Basaremos este ultimo capıtulo en los trabajos de C.M. Marle [11], de P. Balseiro- J.E.
Solomin [2],[3], de M. de Leon -D.M. de Diego [9], entre otros.
2

Capıtulo 2
Resena geometrica
Para estudiar la dinamica de sistemas mecanicos, es necesario situarse en espacios con
muchos grados de libertad. Es para ello que resulta util definir lo que es una variedad,
para poder describir puntos, localmente, como n numeros reales, que seran sus coorde-nadas. Luego, definiremos objetos analıticos (por ejemplo campos vectoriales o formas
diferenciales) que seran independientes de las coordenadas locales elegidas.
2.1. Variedades
Comenzaremos con un estudio geometrico sobre variedades. El lector puede referirse
al libro de S. Morita [14] para abordar los temas de esta seccion.
Definicion 2.1.1. Un mapa coordenado en un conjunto X es un subconjunto U ∈ X
junto a una biyeccionϕ : U → ϕ(U) ∈ R
n
sobre un conjunto abierto ϕ(U) ∈ Rn. Al par (U, ϕ) lo llamaremos par coordenado.
Luego, podemos parametrizar puntos x de U con n coordenadas ϕ(x) = (x1, . . . , xn).
Queremos considerar ahora el caso en que X esta cubierto por estos mapas que, a su vez,
satisfacen ciertas condiciones:
Definicion 2.1.2. Un n-atlas en X es una familia de mapas coordenados (Ui, ϕi)i/inI
tales que
X es cubierto por Uii∈I .
Para cada α, β ∈ I, ϕα(Uα ∩ Uβ) es un abierto en Rn.
Para cada α, β ∈ I, el mapa
ϕβϕ−1α : ϕα(Uα ∩ Uβ) → ϕβ(Uα ∩ Uβ)
es C∞ con inversa C∞ (a las funciones C∞ las llamaremos suaves).
Definicion 2.1.3. Decimos que dos atlas (Ui, ϕi) y (Vα, ψα) son compatibles si suunion es un atlas.
3

Esta ultima definicion implica que los mapas ψϕ−1 deben ser suaves. Se puede ver que
la relacion de compatibilidad es una relacion de equivalencia y podemos entonces formular
la siguiente definicion.
Definicion 2.1.4. Una estructura diferencial en un conjunto X es una clase de equiv-alencia de atlas.
Definicion 2.1.5. Una n-variedad diferencial es un espacio X con una estructuradiferencial.
Observacion 2.1.1. Una n-variedad M hereda una estructura topologica de su estructuradiferenciable: diremos que un subconjunto V ∈ M es abierto si, para cada α, el conjuntoϕα(V ∩Uα) es abierto en R
n. Con esta topologıa ϕα : Uα → ϕα(Uα) es un homeomorfismo.
Asumiremos a partir de ahora que esta topologıa satisface las siguientes propiedades:
La variedad es Hausdorff.
En esta topologıa se tiene una base numerable de conjuntos abiertos.
2.1.1. Mapas entre variedades
Definicion 2.1.1. Sean M y M′ variedades de dimension m y m
′ respectivamente, yA ⊆ M abierto. f : A → M
′ es diferenciable si para todo n-par coordenado (U, ϕ)
del atlas en M , y todo (V, ψ) del atlas en M′, ψ o f o ϕ−1 : ϕ(U ∩ A) ⊂ IRm → IRm′
esdiferenciable.
Notacion: El espacio vectorial de las funciones de M en IR de clase C∞ sera llamado
C∞(M).
Definicion 2.1.2. Sea M una variedad diferenciable. Una curva diferenciable en M
es una funcion diferenciable γ : [a, b] ⊂ IR →M .
2.1.2. Fibrado tangente
Definicion 2.1.3. Sea M una variedad diferenciable.
Sean m ∈M y v ∈ IRk. Entonces, v es un vector tangente a m ∈ M si v = γ′(t0),
para alguna curva diferenciable γ en M tal que γ(t0) = m, con t0 ∈ IR.
El espacio tangente a M en m ∈ M es el espacio vectorial de igual dimensionque M dado por
TmM := vectores tangentes a m ∈M
El fibrado tangente o espacio tangente a M es
TM :=⋃
m∈M
TmM
4

Si m ∈ M , TmM es la fibra de TM en m.
Dada una n-variedad M, sea (U, ϕ) un par coordenado y x ∈ ϕ(U) ⊂ M . Consideremos
las curvas en IRn dadas por ci(t) = ϕ−1(x) + tei, donde ei es el vector de la base canonica
en IRn. Al llevar esta curva a M , tendremos las curvas γi(t) = ϕ(ci(t)), con γi(0) = x.
Estas curvas solo cambian la i-esima coordenada, y por ello para f ∈ C∞(M) se tendra
Dγi(f) =
∂f
∂xi
Los vectores γi(0) ∈ TxM seran anotados ∂∂xi
.
Observacion 2.1.1. El conjunto
∂
∂x1
, . . . ,∂
∂x1
forman una base de TxM .
2.1.3. Campos vectoriales
Definicion 2.1.4.
Un campo vectorial X sobre M es una aplicacion
X : M → TM
X(m) = Xm
donde Xm ∈ TmM, ∀ m ∈M .
Se dice que X es un campo vectorial diferenciable sobre M si ∀ f ∈ C∞(M) setiene que Xf ∈ C∞(M) donde
Xf(m) :=d
dt(f(γ(t)))
∣
∣
∣
∣
t=0
,
siendo γ(t) una curva en M tal que γ(0) = m.
Notacion Llamaremos X(M) al espacio de campos vectoriales sobre M .
Observacion 2.1.2. Podemos ver que un campo vectorial puede pensarse como una apli-cacion que manda funciones de C∞(M) en funciones de M. De hecho, cualquier aplicacionlineal X : C∞(M) → C∞(M) que satisface
X(fg) = f(Xg) + g(Xf)
es un campo vectorial (esta ultima propiedad es la llamada derivacion en el algebraC∞(M)).
5

Localmente, en una n-variedad M con sistema de coordenadas x1, . . . , xn, un campo
vectorial X puede escribirse como
X(x) = Xi(x)
∂
∂xi
(Utilizamos la notacion de Einstein, de manera que ındices repetidos indican una suma).
Definicion 2.1.5. Sea f : M → N una aplicacion diferenciable ∀ m ∈ M . Definimos eldiferencial de f en m ∈M como la aplicacion lineal
(Df)m = (df)m = (f∗)m : TmM → Tf(m)N
dada por((df)mX)(m) := Xm(g o f), ∀ g ∈ C∞(N).
Observacion 2.1.3. para f : M → N , f∗ es llamado el “push foward” de f ; en otraspalabras, para γ(t) curva en M tal que γ(to) = x y γ(t0) = v, consideramos la curvaα(t) = f(γ(t)) en N , con α(t0) = f(x). Luego, f∗ esta definido como
f∗(x)(v) := α(to)
M N
f
v = γ(to)
x = γ(to)
γ f(γ)=α
f(x)= α(t0)
f (v)=α(t0)*
Figura 2.1: Interpretacion del push forward f∗
Definicion 2.1.6. Sean X, Y ∈ X(M). Se define el corchete de campos como laaplicacion bilineal antisimetrica [·, ·] : X(M) × X(M) → X(M) dada por, ∀f ∈ C∞(M),
[X, Y ]m(f) : = Xm(Y f) − Ym(Xf)
= DX(DY f) −DY (DXf)
Proposicion 2.1.1.
Se tiene que ∀ X, Y, Z ∈ X(M)
[X, [Y, Z]] + [Y, [Z,X]] + [Z, [X, Y ]] = 0
Esta relacion es llamada identidad de Jacobi.
Definicion 2.1.6. El corchete de Lie de dos campos vectoriales X, Y es el campovectorial [X, Y ].
Propiedad 2.1.1.
Sea f : M → N un difeomorfismo y sean X, Y ∈ X(M). Entonces,
f∗[X, Y ] = [f∗X, f∗Y ]
6

2.1.4. Fibrado cotangente
Definicion 2.1.7. Sea M una n-variedad diferencial. ∀x ∈M , el espacio dual al tangentesera llamado espacio cotangente, y sera denotado por T ∗
xM .
En coordenadas x1, . . . , xn de M, tenemos ∂∂x1 . . . ,
∂∂xn base de TxM y
dx1, . . . , dx
n
base dual de T ∗xM .
Observacion 2.1.4. Si consideramos f ∈ C∞(m), ∀x ∈M , tenemos que df ∈ T∗xM y
df(x) =∂f
∂xidx
i
Definicion 2.1.8. Dada una n-variedad diferencial M , llamamos Fibrado cotangente
de M al espacio
T∗M :=
⋃
x∈M
T∗xM
2.1.5. Formas diferenciales
Definicion 2.1.7. Una p-forma diferencial en m ∈ M es una aplicacion suave ωm
p-lineal antisimetrica definida sobre TmM , es decir
ωm : TmM × . . .× TmM → IR
ωm(X1, . . . , Xp) := (−1)|σ|ωm(Xσ(1), . . . , Xσ(p))
donde |σ| representa el signo de una permutacion σ del conjunto 1, . . . , p.Una p-forma diferencial en M es una aplicacion suave ω p-lineal antisimetrica
definida sobre TM , es decir
ω : TM × . . .× TM → IR
ω(X1, . . . , Xp) := (−1)|σ|ω(Xσ(1), . . . , Xσ(p))
donde |σ| representa el signo de una permutacion σ del conjunto 1, . . . , p.
Notacion Denotamos al conjunto de las p-formas diferenciales sobre M como Ωp(M).
Para nuestro estudio geometrico de sistemas mecanicos nos seran de gran utilidad
1-formas y 2-formas diferenciales. Es por ello que prestaremos especial atencion a estos
casos particulares.
Observacion 2.1.2. Ω0(M) = C∞(M).
Definicion 2.1.8. Para g ∈ Ωp(M) y X ∈ X(M) se define la contraccion de g con X,iXg, como la (p− 1)-forma dada por
iXg(X1, . . . , Xp−1) := g(X,X1, . . . , Xp−1)
7

Definicion 2.1.9. Sean g ∈ Ωp(M), β ∈ Ωq(M); definimos el producto exterior de g
y β como la (p+ q)-forma
g ∧ β :=1
p!q!
∑
σ∈P1,...,p+q
(−1)|σ|(g ⊗ β)σ
donde (g ⊗ β)σ(X1, . . . , Xp+q) = (g ⊗ β)(Xσ(1), . . . , Xσ(p+q)), siendo
(g ⊗ β)(X1, . . . , Xp, Y1, . . . , Yp) := g(X1, . . . , Xp)β(Y1, . . . , Yp)
Como ejemplo, si consideramos α, β 1-formas en una variedad M , podemos definir una
2-forma, utilizando el producto exterior, del siguiente modo: ∀u, v ∈ TxM , ∀x ∈M
α ∧ β(u, v) = α(u)β(v) − α(v)β(u)
Definicion 2.1.10. El diferencial exterior d : Ωp(M) → Ωp+1(M) es la unica apli-cacion lineal tal que,
si f ∈ Ω0(M), entonces df es el diferencial usual de funciones f ∈ C∞
d2 = 0.
si g ∈ Ωp(M) y β ∈ Ωq(M), entonces
d(g ∧ β) := dg ∧ β + (−1)pg ∧ dβ
Definicion 2.1.11. Se dice que ω es una p-forma cerrada si dω = 0.
Si consideramos por ejemplo una 1-forma α sobre M cuya expresion local en coorde-
nadas es α = αidxi, su diferencial sera
dα = dαi ∧ dxi =
∂αi
∂xj(dxj ∧ dxi)
Si consideramos que α es una 2-forma diferencial sobreM localmente dada por la expresion
α = αijdxi ∧ ∆Xj , su diferencial estara dado por
dα = d(αij) ∧ dxi ∧ dxj =
∂αij
∂xk(dxk ∧ dxi ∧ dxj)
Definicion 2.1.12. Sea f : M → N una aplicacion diferenciable entre variedades dife-renciables. Definimos la aplicacion
f∗ : Ωp(N) → Ωp(M)
(f ∗g)m(X1, · · · , Xp) := gf(m)(f∗X1, · · · , f∗Xp)
donde m ∈M . Esta aplicacion recibe el nombre de “pull-back” de α por f .
8

Definicion 2.1.13. Dados f ∈ C∞(M) y X, Y ∈ X(M), definimos
La derivada de Lie de f con respecto a X como
LXf : M → IR
LXf(m) := df(m)(X(m))
donde df es el diferencial usual de una funcion sobre M de clase C∞.
La derivada de Lie de Y con respecto a Xcomo
LXY := [X, Y ]
Recordemos ahora algunas propiedades que utilizaremos en las proximas secciones.
Propiedad 2.1.2. Dada g ∈ Ωp(M) se tiene que
LXdg = dLXg, ∀X ∈ X(M)
Propiedad 2.1.3. Sean f : M → N un difeomorfismo y g ∈ Ωp(M). Para X ∈ X(M),tenemos que
Lf∗Xf∗g = f
∗LXg
Propiedad 2.1.4. Para g ∈ Ωp(M) y X, Y ∈ X(M), vale que
1. i[X,Y ]g = LXiY g − iY LXg
2. LXg = diXg + iXdg
Propiedad 2.1.5. Si f : M → N es una aplicacion diferenciable y g ∈ Ωp(N), se tieneque
f∗dg = df
∗g
9

2.2. Geometrıa simplectica
Las variedades simplecticas de dimension finita aparecen ligadas al espacio de fases
de sistemas mecanicos clasicos con un numero finito de grados de libertad, donde la
forma simplectica ω es la estructura geometrica que permite definir los campos vectoriales
Hamiltonianos y el corchete de Poisson. El lector puede referirse, por ejemplo, al libro de
A. Cannas [6] para abordar los temas que estudiaremos en esta seccion.
2.2.1. Variedades simplecticas
Definicion 2.2.1. Decimos que una 2-forma ω es no-degenerada si
ω(X, Y ) = 0, ∀Y ∈ TM ⇒ X = 0
Definicion 2.2.2. Una forma simplectica sobre M es una 2-forma sobre M cerrada yno-degenerada.
Definicion 2.2.3. Llamamos variedad simplectica al par (M,ω), donde M es unavariedad y ω es una forma simplectica sobre M .
Teorema 2.2.1. (Teorema de Darboux) Sea un grupo de Lie G que actua propia y sim-plecticamente sobre una variedad simplectica Y con respecto a dos formas simplecticasω0 y ω1. Sea X una subvariedad G-invariante tal que ω0 = ω1 en X. Entonces existe undifeomorfismo ϕ G-equivariante definido en un entorno tubular U de X tal que ϕ|X es laaplicacion identidad y ϕ∗
ω1 = ω0 en U .
Sea φ una accion de G sobre Q. Esta accion puede ser levantada al cotangente de Q,
teniendose la accion
φT ∗
: G× T∗Q→ T
∗Q
dada por
φT ∗
g (gq).X = gφg(q)((φg)∗X)
con X ∈ TqQ y gq ∈ T∗q Q.
Definicion 2.2.4. Sean (M,ω) y (N, β) variedades simplecticas.
Una aplicacion defierenciable f : M → N es una transformacion simplectica o
canonica sif∗β = ω
Sean G un grupo de Lie y φ una accion de G sobre la variedad simplectica (M,ω).Decimos que φ es una accion simplectica si la aplicacion φg : (M,ω) → (M,ω)
es una transformacion simplectica ∀ g ∈ G. En otras palabras, si ω s invariante aizquierda por la accion de G; es decir,
(φg)∗ω = ω, ∀ g ∈ G
10

Proposicion 2.2.1. Sea (M,ω) una variedad simplectica. Si f : N → M es un isomor-fismo, f ∗
ω es una forma simplectica.
Demostracion.
Sean X, Y ∈ X(N) tal que (f ∗ω)(X, Y ) = 0, ∀X ∈ X(N), entonces
0 = (f ∗ω)(X, Y )
= ω(f∗X, f∗Y ) ∀X ∈ X(N)
Pero como f es isomorfismo, entonces f∗ tambien lo es y por lo tanto,
ω(W, f∗Y ) = 0 ∀W ∈ X(N)
Por ser ω simplectica, se tiene que f∗Y = 0 y entonces Y = 0.
Definicion 2.2.5. El ortogonal simplectico de X ⊂ TmM con respecto a la forma
ω se define comoX
w = v ∈ TmM /ω(m)(u, v) = 0, ∀ u ∈ X
Veamos ahora una propiedad que usaremos mas adelante.
Proposicion 2.2.2.
Sea X ⊂ TmM . Si la forma ω|X es simplectica, entonces el espacio TmM puede descom-ponerse
TmM = X ⊕Xω
Demostracion. Primero veamos que dimTmM = dimX + dimXω.
dimTmM ≥ dimX + dimXω
Consideremos la aplicacion ωb : TmM → T∗mM tal que para u ∈ TmM esta dada por
ωb(u) = ω(u, ·)
Para x ∈ X, ωb(v) anula a Xω, si u ∈ Xω entonces ω(u, v) = 0 ∀ v ∈ X. Por lo
tanto ωb(v) = 0 ∀u ∈ Xω.
Entonces se tiene la aplicacion lineal inducida ωbX : X → (TmM/X
ω)∗, donde para
cada v ∈ X, la aplicacion ωbX(v) : TmM/X
ω → IR esta dada por
ωbX(v)(u) = ω(v, u)
Veamos que ωbX es un isomorfismo.
• ωbX esta bien definida.
u′ ∈ u ⇒ u− u
′ ∈ Xω
⇒ ω(v, u− u′) = 0 ∀ v ∈ X
⇒ ω(v, u) = ω(v, u′) ∀ v ∈ X
11

• ωbX es claramente lineal.
• ωbX es inyectiva.
Dado v ∈ X, ωbX(v) = 0 ⇒ ω
bX(v)(u) = 0 ∀u ∈ TmM/X
ω.
0 = ωbX(v)(u) ∀u ∈ TmM
= ω(v, u) ∀u ∈ TmM
y como ω|X es simplectica se tiene que v = 0.
Ası ,
dimTmM − dimXω = dim (TmM/X
ω)∗ ≥ dimX
dimTmM ≤ dimX + dimXω
Consideremos la composicion ωbX = i
∗ ωb : TmM → T∗mM
i∗→ X
ω, tal que para
u ∈ TmM , v ∈ X esta dada por
ωbX(u)(v) = i
∗(ωb(u))(v)
= ωb(u)(v)
= ω(u, v)
Veamos que Ker ωbX = X
ω.
TmM ⊃ Ker ωbX = u ∈ TmM / ω
bX(u)|X ≡ 0
= u ∈ TmM / ωbX(u)(v) = 0 ∀ v ∈ X
= u ∈ TmM /ω(u, v) = 0 ∀ v ∈ X
= Xω
Ası ,
dimTmM − dimXω = dim rango (ωb
X) ≤ dimX
Por ultimo veamos que X ∩Xω = 0. Sea u ∈ X ∩Xω, entonces u ∈ X y
ω(u, v) = 0 ∀v ∈ X. Como ω|X es simplectica, entonces u = 0.
Ejemplo
Un importante ejemplo de una variedad simplectica esta dado por el fibrado cotangente
T∗Q, de cualquier variedad Q, munido de su forma simplectica canonica. Recordemos que
el fibrado cotangente a Q es el fibrado vectorial cuyas fibras son T ∗q Q, los espacios duales
a TqQ. Si (qi) son las coordenadas de q ∈ U y α = pidqi ∈ T
∗q Q, con (dqi) la base dual
de (∂∂q
i), a (q, α) ∈ T∗UQ se le asignan coordenadas (qi
, pi). Definiremos en el siguiente
capıtulo la forma simplectica canonica sobre este espacio.
12

2.2.2. Campos Hamiltonianos
Como sucede para variedades riemannianas, en el caso de una variedad simplectica
M , existe una identificacion entre los campos diferenciables y las 1-formas sobre M , dada
por
i : X(M) → Ω1(M)
donde
i(X) = iXω
Se puede ver que esta aplicacion es efectivamente una identificacion probando que es
inyectiva. Sean X, Y ∈ X(M) tales que
iXω = iY ω.
Tenemos ası , que ∀Z ∈ X(M),
iXω(Z) = iY ω(Z) ⇒ ω(X,Z) = ω(Y, Z) ⇒ ω(X − Y, Z) = 0
Luego, por ser ω no degenerada, concluimos que X − Y = 0, o sea X = Y .
Definicion 2.2.6. Dadas (M,ω) una variedad simplectica y H : M → IR una funcionde clase C∞, definimos el campo vectorial XH como el campo identificado con la 1-formadH. Es decir,
iXHω = dH
XH es el campo vectorial Hamiltoniano de H.
Si (M,ω) es una variedad simplectica y H : M → IR es una funcion diferenciable que
describe la dinamica de un sistema, llamada funcion Hamiltoniana o Hamiltoniano,
decimos que (M,ω,H) es un sistema Hamiltoniano.
Del mismo modo, podrıamos definir un campo Hamiltoniano asociado a una funcion
H : M → M del siguiente modo:
Definicion 2.2.7. Dadas (M,ω) una variedad simplectica y una funcion (el Hamilto-niano) H : M → M , sabemos que dH ∈ T
∗M y entonces podemos definir el campo
vectorial Hamiltoniano XH ∈ X(M) asociado a H como el campo que satisface
Ω(XH , ·) = dH
De este modo, asociado a cualquier funcion H sobre M tenemos las llamadas Ecua-
ciones de Hamilton: una curva m(t) ∈ M satisface estas ecuaciones (de primer orden
sobre M) si es una curva integral del campo hamiltoniano XH asociado a H , es decir, si
m(t) = XH(m(t)) ∈ Tm(t)M
13

2.2.3. Corchete de Poisson
Definicion 2.2.8. Un corchete de Poisson sobre una variedad M es una aplicacion
·, · : C∞(M) × C∞(M) → C∞(M)
tal que se satisface:
1. ·, · es bilineal (con respecto a la suma de funciones y al producto por constantes).
2. ·, · es antisimetrico.
3. Satisface la identidad de Jacobi.
4. ∀f, g, h ∈ C∞(M) valefg, h = fg, h+ gf, h
Definicion 2.2.9. Dada (M,ω) variedad simplectica, el corchete de Poisson asociado
a ω , de f y g -para f, g ∈ C∞(M)- es la funcion f, gω ∈ C∞(M) dada por
f, gω(m) := ωm(Xf , Xg).
o lo que es equivalente,
f, gω := −iXfiXg
ω = ω(Xf , Xg)
Al trabajar en una variedad simplectica, y si no hay lugar a confusion, omitiremos el
subındice ω del corchete de Poissson.
Observacion 2.2.1. Si tomamos un sistema local de coordenadas qi, pii=1,...,n en una
2n-variedad M tenemos que
f, g =∂f
∂qi
∂g
∂pi−∂f
∂pi
∂g
∂qi
Proposicion 2.2.3. El espacio (C∞(M), ·, ·) es un algebra de Lie real.
Corolario 2.2.1.
Xf,g = −[Xf , Xg]
Es decir, la aplicacion de C∞(M) en X(M) que le asigna a cada f su campo HamiltonianoXf es un antihomomorfismo de algebras de Lie.
Proposicion 2.2.4. Sean (M,ω) una variedad simplectica y f, g ∈ C∞(M). Entonces,
f, g = −LXfg = LXg
f
14

Demostracion.
De la definicion de LX y teniendo en cuenta que dg = iXgω, vemos que
LXfg = iXf
dg = iXfiXg
ω
Ademas,
iXfiXg
ω = −iXgiXf
ω = ω(Xg, Xf) = g, f = −f, g
De este modo, queda demostrado que
f, g = −LXfg.
15

Capıtulo 3
Mecanica lagrangiana
Los sistemas fısicos pueden ser descripton especificando una variedad Q -llamada es-
pacio de configuraciones- y una funcion L -el Lagrangiano del sistema- definido sobre
el espacio de fase TQ. Comenzaremos estudiando estos sistemas. El lector puede referirse
al libro de J. Marsden [12] para encontrar un estudio mas detallado del tema.
Siguiendo las ideas de la introduccion previa, en mecanica lagrangiana, Q denota la
variedad cuyos puntos representan las posibles configuraciones de un sistema mecanico.
Si dimQ = n, decimos que el sistema tiene n grados de libertad.
3.1. Sistemas lagrangianos
Sea Q una n-variedad de configuraciones y TQ el espacio de fase con coordenadas
(qi, q
i) para i = 1, · · · , n 1. Las ecuaciones de movimiento para L pueden deducirse del
principio variacional de Hamilton. Los extremos de
∫
L(q, q)dt
son las soluciones de las Ecuaciones de Euler-Lagrange
d
dt
(
∂L
∂qi
)
−∂L
∂qi= 0 (3.1)
Proposicion 3.1.1. La curva γ = q(t) es la trayectoria del sistema entre q(t0) = q0 yq(t1) = q1 si y solo si γ es punto crıtico del funcional S(γ), llamado accion del sistema,dado por
S(γ) =
∫ t1
t0
L(q(t), ˙q(t))dt
para variaciones de la curva que dejan invariantes los extremos.
1Denotaremos a veces vi = qi.
16

Demostracion: En efecto, si consideramos las curvas q(t, s) : [t0, t1]× [−ε, ε] → Q tales
que ∀sq(t0, s) = q0 y q(t1, s) = q1
q(t, 0) = γ(t)
podemos pensar en la siguiente funcion de s:
Sq(s) =
∫ t1
t0
L(q(t, s), q(s, t))dt
Con esta notacion, la proposicion anterior es equivalente a decir que γ e la trayectoria
del sistema si y solo sidSq
ds
∣
∣
∣
∣
s=0
= 0
para todo curva q en estas condiciones. Por otro lado, podemos calcular
dq
ds=
d
ds
(
dq
dt
)
=d
2q
dsdt=
d
dt
(
dq
ds
)
y comodSq
ds=
∫ t1
t0
(
∂L
∂q
dq
ds+∂L
∂q
dq
ds
)
dt
al integrar por partes se tiene que
dSq
ds=
∫ t1
t0
(
∂L
∂q
dq
ds−
d
dt
(
∂L
∂q
)
dq
ds
)
dt
=
∫ t1
t0
[(
∂L
∂q−
d
dt
∂L
∂q
)
dq
ds
]
dt
Luego,dSq
ds
∣
∣
∣
s=0= 0 para toda curva q(s, t) bajo las hipotesis si y solo si
d
dt
(
∂L
∂q
)
−∂L
∂q= 0
Observacion:
Para sistemas simples, el Lagrangiano puede escribirse como la suma de dos terminos
L(q, v) = K(q, v) − V (q)
donde K(q, v) representa a la energıa cinetica del sistema y V (q), que no depende de las
velocidades, a los potenciales asociados a las fuerzas conservativas actuantes.
17

3.2. Definiciones
La formulacion lagrangiana de los sistemas mecanicos se relaciona con la formulacion
hamiltoniana a traves de la transformada de Legendre. Para poder estudiar esta relacion,
comenzaremos con algunas definiciones.
Sea (Q,Ω) una variedad simplectica, donde Ω es la forma simplectica sobre M , y
H ∈ C∞(Q). Recordemos que el campo vectorial hamiltoniano XH ∈ X(Q) asociado a H
es el campo que satisface
Ω(XH , ·) = dH
o lo que es equivalente, XH satisface que iXHΩ = dH
3.2.1. Transformada Legendre
Consideremos una variedad Q y su espacio de velocidades TQ con coordenadas (qi, q
i).
Definicion 3.2.1. Dado un lagrangiano L : TQ→ R, la transformada de Legendre
para L es el mapa
FL : TQ → T∗Q
(q, q) → (q,∂L
∂q)
Si tomamos v, w ∈ TqQ, podemos escribir a FL como
FL(v) · w :=d
dt
∣
∣
∣
∣
t=0
L(v + tw)
Geometricamente, FL es la derivada de L sobre la fibra TqQ en la direccion de w.
3.2.2. Formas lagrangianas
Utilizando la transformada de Legendre podremos definir dos formas diferenciales que
seran de gran utilidad. Para ello, recordemos primero las formas diferenciales canonicas
definidas sobre el cotangente de una variedad diferencial.
Definicion 3.2.2. Dada una variedad Q con coordenadas locales U, q1, . . . , q
n y coor-denadas cotangentes T ∗
U, q1, . . . , q
n, p1, . . . , pn, definimos la 2-forma canonica Ω en
T∗U como
Ω = dqi ∧ dpi
Se puede comprobar facilmente que la definicion anterior no depende de la eleccion de las
coordenadas. Del mismo modo podemos definir la siguiente 1-forma.
Definicion 3.2.3. Dada una variedad Q con coordenadas locales U, q1, . . . , q
n y coor-denadas cotangentes T ∗
U, q1, . . . , q
n, p1, . . . , pn, definimos la 1-forma canonica σ en
T∗U como
σ = pidqi
18

Estamos en condiciones ahora de definir las formas lagrangianas:
Definicion 3.2.4. Si consideramos σ la 1-forma canonica sobre T ∗Q podemos construir
la 1-forma lagrangiana en TQ dada por
σL := (FL)∗σ
En coordenadas, tendremos
σL =∂L
∂qidq
i
Definicion 3.2.5. Dada Ω la 2-forma canonica en el espacio cotangente a Q, podemosconstruir la 2-forma lagrangiana ΩL dada por
ΩL := −(FL)∗Ω
Observacion 3.2.1. ΩL = dσL2. En particular, ΩL es cerrada.
Demostracion: En efecto, tenemos que
ΩL = (FL)∗Ω
= −(FL)∗(−dσ)
= d[(FL)∗σ]
= dσL
Sera interesante estudiar cuando ΩL resulta simplectica. Para ello, consideraremos su
expresion en coordenadas:
ΩL = dσL
= d
(
∂L
∂qidq
i
)
=∂
2L
∂qj∂qidq
i ∧ dqj −∂
2L
∂qj∂qidq
i ∧ dqj
De aquı podemos encontrar la matriz A asociada a ΩL. Llamaremos M a la matriz con
entradas
Mij =
(
∂2L
∂qi∂qj
)
Podemos ver entonces que ΩL es no degenerada -y con ello, simplectica- si y solo si
det(A) 6= 0, si y solo si det(M) 6= 0.
Definicion 3.2.6. Diremos que el lagrangiano L es regular si ΩL es una forma sim-plectica.
2Nuestra definicion de formas Lagrangianas coincide con la utilizada en [2] y [18] . Otros autoresllaman ΩL = −dσL como en [17] o [9] .
19

Observacion 3.2.2. ([13]) Si el lagrangiano L es regular, FL es localmente un difeo-morfismo.
Utilizaremos la matriz M para definir un producto interno que sera de gran utilidad
a la hora de analizar sistemas no holonomos y que sera luego generalizado para el caso
de sistemas no holonomos generalizados:
Observacion 3.2.3. Si la matriz M es definida positiva luego, para u, v ∈ Q,
< u,w >M= uiMijw
j
es un producto inverso. La recıproca tambien es valida.
3.2.3. Funcion de Energıa
Para nuestra variedad Q, podemos tomar coordenadas (q, v) en TQ y de este modo
definimos la funcion de energıa E asociada al lagrangiano L dada por
EL(q, v) =∂L
∂v· v − L(q, v)
Proposicion 3.2.1. La curva q(t) es solucion de las ecuaciones de Euler-Lagrange en Qsi y solo si (q(t), q(t)) como curva levantada en TQ es curva integral del campo XE, paraXE tal que
ΩL(XE , ·) = dE (3.2)
Esta proposicion es considerada la version simplectica de las ecuaciones de Euler-
Lagrange. Puede encontrarse su demostracion en diversos trabajos, entre ellos [17][18]
.
Observacion 3.2.4. Cuando L es regular (3.2) tiene una unica solucion XE llamadacampo vectorial de Euler-Lagrange . Mas aun, las soluciones de XE, como ecuaciondiferencial de segundo orden, coinciden con las soluciones de las ecuaciones de Euler-Lagrange.
3.2.4. Campos especiales
Consideremos Q una variedad diferencial.
Definicion 3.2.7. Decimos que un campo vectorial X tangente a TQ es especial si∀(q, v) ∈ TQ se tiene que
X(q, v) = (v, z(q, v))
La definicion de “campos especiales” los hace geometrico equivalentes a la de “de-
splazamientos virtuales” en mecanica y a la de “ecuacion diferencial de segundo orden” en
analisis. La primera equivalencia sera comprendida luego de introducir la Definicion
(4.3.3). La segunda equivalencia resulta de la siguiente razon :
20

Observacion 3.2.5. Si un campo X es especial y (q(t), v(t)) es una curva integral de Xentonces
(q(t), v(t)) = (v(t), z(t))
y de allı se obtiene la ecuacion diferencial de segundo orden q(t) = z(t).
Observacion 3.2.6. ([17],[18]) Solamente los campos vectoriales especiales pueden tenera (q(t), q(t)) en TQ -en tanto que curvas levantadas de q(t) en Q- como curvas integrales.En particular, las soluciones XE de (3.2) son campos vectoriales especiales ([13]).
Al espacio de campos especiales sobre TQ lo llamaremos:
S(TQ) := X ∈ X(TQ) : X es special
3.2.5. Vectores y campos verticales
Sea Q una n-variedad con coordenadas locales (qi, v
i) en TQ. Dado un vecor tangente
ω ∈ T(q,v)(TQ) podemos escribirlo como
ω = ωi ∂
∂qi+ ω
i ∂
∂vi
Definicion 3.2.8. ω se dice vertical si ωi = 0 para todo i = 1, . . . , n 3.
En otras palabras, los vectores tangentes verticales seran de la forma ui ∂∂vi . Se puede
ver que esta definicion es intrınseca a partir de la siguiente observacion:
Observacion 3.2.7. Sea (u, w) ∈ T(q,v)TQ un vector vertical y consideremos la proyeccioncanonica
Π : TQ→ Q
(q, v) → q
Luego, en el punto (q, v) se tieneΠ∗(u, w) = 0
i.e, u = 0.
El espacio de campos vectoriales verticales, i.e. campos vectoriales que en cada punto
son verticales, sera llamado V(TQ). Para cada (q, v) ∈ TQ definimos
V(q,v) := w ∈ T(q,v)(TQ) : w es vertical
Finalmente llamaremos τ : X(Q) → V(TQ) al isomorfismo natural entre X(Q) y V(TQ)
dado por
τ(Y ) = (0, Y ) ∈ V(TQ)
Para vectores verticales tendremos τ(q,v) : TqQ→ V(q,v) definido como
τ(q,v)(ui ∂
∂qi) = u
i ∂
∂vi
3Estos son los vectores que estan en las fibras.
21

3.2.6. Campos, formas y funciones horizontales
Definicion 3.2.9. Una funcion β ∈ T∗(q,v)(TQ) se dice horizontal si ∀w ∈ V(q,v) se tiene
β(w) = 0
Definicion 3.2.10. Del mismo modo, una 1-forma α en TQ es horizontal si para todo(q, v) ∈ TQ, α(q, v) es horizontal.
Definicion 3.2.11. Finalmente, un campo vectorial se dice horizontal si en cada puntoes horizontal.
En coordenadas (qi, v
i) en TQ una 1-forma α en TQ puede escribirse como
α = αi(q, v)dqi + αi(q, v)dv
i
La 1-forma α es horizontal si y solo si α = αi(q, v)dvi.
El espacio de 1-formas horizontales sera llamado
H1 := α ∈ Ω1(TQ) : α es horizontal
3.3. Principio de D’Alembert
Sea Q una variedad de configuraciones de un sistema con Lagrangiano L y coordenadas
(qi, v
i) en TQ. Consideremos una 1-forma horizontal α en TQ tal que α = αidqi, y sea
Xα ∈ X(TQ) un campo vectorial tal que
ΩL(Xα, ·) = α (3.3)
Si L es regular, ΩL es una forma simplectica y por lo tanto (3.3) tiene una unica
solucion Xα. Este campo vectorial Xα sera vertical. En coordenadas podemos escribir
Xα = Xiα
∂
∂vi
Esto da lugar a un isomorfismo α 7−→ Xα del espacio de 1-formas horizontales de TQ en
V(TQ)
Observacion 3.3.1. En este contexto, las fuerzas de un sistema son representadas por1-formas horizontales sobre TQ. Mediante la identificacion canonica antes descripta entre1-formas en Q con 1-formas horizontales en TQ, consideraremos a las fuerzas tambiencomo 1-formas sobre Q. De este modo, el trabajo realizado por una fuerza F sobre unvector w sera representado como F (w).
Observacion 3.3.2. Si en un sistema con variedad de configuracion Q y lagrangiano Lregular, una 1-forma α representa una fuerza no contemplada en el lagrangiano, entonceslas trayectorias del sistema seran aquellas curvas q(t) en Q tales que (q(t), q(t)) es unacurva integral del campo X ∈ X(TQ) tal que
ΩL(X, ·) = −dEL + α (3.4)
22

En particular, si un campo X satisface (3.4) entonces es especial. En efecto, por
linealidad, si X satisface (3.4) entonces
X = XE +Xα
Como Xα es vertical tenemos que
Xα(q, v) = (0, Zα(q, v))
y como XE es especial (XE(q, v) = (v, ZE(q, v)) tenemos que
X(q, v) = (v, ZE + Zα)
por lo que podemos concluir que X es especial.
Recordemos ahora que la Proposcion 5.10 nos dio una descripcion de las solu-
ciones de sistemas mecanicos irrestrictos. Este resultado es llamado a veces Principio deD’Alembert pero el mismo nombre es tambien utilizado en otras circunstancias.
Cuando una fuerza externa Fe actua sobre un sistema mecanico ciertas modifica-
ciones a la ecuacion (3.2) deben ser realizadas ([17],[4]). Enunciaremos ahora el principio
de D’Alembert:
Principio de D’Alembert
La dinamica de un sistema irrestricto cuando una fuerza externa Fe actua sobre el es
generada por el unico campo vectorial XU ∈ X(TQ) tal que para todo w ∈ T(q,v)(TQ) se
tiene
ΩL(q, v)(XU(q, v), w) = (−dEL + Fe)(w) (3.5)
Por lo visto antes, podemos afirmar que el campo XU es efectivamente especial.
23

Capıtulo 4
Sistemas mecanicos con vınculos
En el capıtulo anterior hemos introducido sistemas mecanicos sin restricciones y las
respectivas definiciones que resultan utiles para su estudio. En este capıtulo discutiremos
sistemas mecanicos con vınculos. Estudiaremos primero dos clases distintas de restric-
ciones (holonomas y no holonomas) para luego focalizarnos en sistemas mecanicos no
holonomos. El lector puede referirse a ([5]) para mas detalles sobre estos sistemas.
Si bien hemos explicado en el capıtulo anterior como describir un sistema mecanico a
partir de una variedad de configuraciones Q y un lagrangiano L, en nuestro analisis no
hemos incluıdo sistemas mecanicos restringidos. Daremos a continuacion una definicion
precisa de distintas clases de sistemas restringidos y veremos dos ejemplos en cada caso,
con el simple proposito de esclarecer las diferencias entre ellos -y no de resolverlos-.
Recordemos primero que si consideramos un sistema dinamico sobre cierta variedad
diferencial Q, llamamos vınculos o restricciones a una distribucion C en TQ para la
cual las velocidades del sistema en cada punto q ∈ Q pertenecen a C.
4.1. Sistemas mecanicos holonomos
Consideremos una variedad de configuraciones Q y un Lagrangiano L sobre su espacio
tangente TQ.
Definicion 4.1.1. Un conjunto de restricciones C se dice holonomo si es una distribu-cion integrable en TQ. Estos vınculos restringen la curva q(t), que describe la dinamicadel sistema, a una subvariedad Q → Q tal que TQ = C.
Observacion 4.1.1. Las ecuaciones originales del sistema sobre Q pueden ser llevadasa Q utilizando ciertas proyecciones adecuadas
Teniendo en cuenta esta ultima observacion, podemos ver que para esta clase de re-
stricciones es posible llevar nuestro sistema a la nueva variedad Q. Ası, utilizando las
ecuaciones proyectadas, podemos trabajar con este nuevo sistema como si fuera uno no
restringido. Un algoritmo utilizado para trabajar con esta clase de sistemas puede encon-
trarse en [8].
24

Si para nuestro n-espacio de configuraciones Q consideramos que los vınculos estan da-
dos por k funciones φi de modo que, para las trayectorias del sistema q(t) = (q1(t), . . . , qn(t))
se tiene
φi(q1(t), . . . , qn(t)) = 0 i = 1, . . . , k ,
tendremos que
Q =
k⋂
i=1
φi = 0
Si dφii son linealmente independientes en todo punto de Q tendremos que Q es una
subvariedad de dimension n− k. Para vınculos holonomos, las funciones que nos dan las
restricciones no dependen de las velocidades sino solamente de las posiciones.
En particular, tendremos que ∀q ∈ Q
TqQ =
k⋂
i=1
ker dφi(q)
4.1.1. Ejemeplos
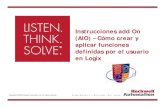
Ejemplo 1
Un ejemplo clasico de sistemas holonomos es el del movimiento de un pendulo que se
mueve en un espacio plano. Si consideramos una masa sujeta de una bara, como en la
figura, la masa podra moverse solamente sobre una curva del espacio. Las restricciones
aquı estan dadas por el hecho de que la longitud L de la bara se mantiene siempre
constante. De este modo, si consideramos (x, y) la posicion del centro de masa, podremos
obtener las funciones que restringen las posiciones:
√
x2 + y2 − L = 0
L
O
(x,y)
0
Figura 4.1: Pendulo
25

Ejemplo 2
Consideremos ahora dos partıculas de masas m y M que estan conectadas por una
cuerda inextensible de longitud L, que pasa a traves de un agujero en una superficie lisa
(una mesa). La masa M esta suspendida bajo la mesa, y la masa m descansa sobre la
mesa a una distancia R del agujero.
En este caso, un campo gravitacional g actua sobre el sistema. La masa m empieza a
moverse a velocidad v0 sobre la mesa, a una distancia r0 del orificio, formando un angulo
recto con la cuerda. Supondremos que M se mueve solo en una lınea vertical.
Escribiremos las coordenadas de la masas m y M como
qm = (xm, ym, 0) , qM = (0, 0, zM)
De este modo, la distancia de la masa m al orificio es R =√
x2m + y2
m y el vınculo puede
escribirse como
R + zM = L
M
m
L
Figura 4.2: Problema de dos masas con vınculos holonomos
Para encontrar las ecuaciones de movimiento de este sistema, recordemos que tomare-
mos el Lagrangiano como
L(q, v) = K(q, v) − V (q, v)
en donde K(q, v) representa la energıa cinetica del sistema y V (q) los potenciales asocia-
dos a las fuerzas conservativas actuantes.
Llamaremos aquı θ al angulo de rotacion de la cuerda sobre la superficie respecto a
cierto eje fijo. La velocidad con que se achica el segmento de cuerda que esta sobre la
superficie sera R. De este modo, la longitud de la cuerda vertical que sostiene a la masa
M sera zM = L − R y la velocidad con que cambia esta cuerda sera, nuevamete, R. Es
aquı en que hace efecto la restriccion de la cuerda que mantiene su longitud a lo largo del
tiempo.
26

Fısicamentem este problema resulta interesante para estudiar la conservacion del mo-mento: como le hemos dado una velocidad inicial (v0), no estamos asumiendo que el
momento es nulo y con ello, no estamos asumiendo que el angulo θ se mantiene constante.
Una vez tenido en cuenta el vınculo, el lagrangiano toma la forma
L =mR
2
2+mR
2θ
2
2+MR
2
2−mg(L− R)
Es facil ver que las ecuaciones que describen la dinamica del sistema estan dadas por
(m+M)R −mg −mRθ2 = 0
θ = 0
27

4.2. Sistemas mecanicos no holonomos
Un caso mas interesante de restricciones corresponde al caso en que se tienen vınculos
no holonomos, que surgen cuando las restricciones no son una subvariedad de Q. Para
una vision global de sistemas Lagrangianos sujetos a restricciones lineales el lector puede
referirse a [9].
Definicion 4.2.1. Consideremos una n-variedad de configuraciones Q. Un sistema la-
grangiano no holonomo esta dado por
1. Un lagrangiano regular L : TQ→ R
2. Una (n−m)-distribucion C en TQ.1
Esto significa que las unicas velocidades permitidas son las tangentes a C. En otras
palabras, para los sistemas mecanicos no holonomos no es posible describir los vınculos
mediante funciones que solo dependan de las posiciones sino que, ademas, estas funciones
dependeran de las velocidades.
4.2.1. Ejemplos
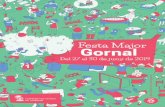
Ejemplo 1
Un ejemplo clasico de sistemas mecanicos no holonomos es el del disco que rueda sin
deslizarse sobre un plano horizontal. A continuacion vemos un esquema del problema:
X
Z
Y
Plano que contiene al disco
p(t) = (x,y)
ángulo entre el eje x y
el plano que contiene al disco
punto de contacto = centro del disco
R
ángulo entre el eje vertical
y un punto fijo P
eje vertical
P
Figura 4.3: Disco sobre un plano horizontal
1Si C fuese integrable, estarıamos en el caso de las restricciones holonomas
28

Un analisis mas generico puede hacerse si se considera, como en ([7]), el caso en el que
el disco se desplaza sin deslizamiento sobre un plano inclinado (el ejemplo anterior sera,
entonces, el caso en que el angulo de inclinacion del plano sea nulo).
Figura 4.4: Disco sobre un plano inclinado
Aquı los ejes coordenados se eligen con ı paralelo al plano inclinado y k normal a el.
Las coordenadas de nuestro problema son el angulo de giro φ, el angulo de rodadura θ, y
las coordenadas del centro de masa del disco, x, y y z.
La condicion de que el disco no se caiga y quede recostado sobre el plano es un vınculo
holonomo dado por
f1 (z) = z −R = 0
donde R es el radio del disco. Este vınculo puede tratarse despejando z y reemplazando
de ahora en mas z = R.
La condicion de rodadura puede expresarse de la siguiente forma
g1(x, y, θ) =√
x2 + y2 − R θ = 0
La condicion de giro implica, como no hay velocidad del centro de masa en k, que
g2(x, y, φ) = x sinφ− y cosφ = 0
Tanto g1 como g2 son no-holonomos y no integrables. Luego de algunos calculos se
puede ver que el Lagrangiano del sistema es
L
(
x, x, y, θ, φ
)
=1
2M
(
x2 + y
2)
+1
2Ic θ
2 +1
2Id φ
2 +Mgx sinα
29

Donde M es la masa del disco, Id es el momento de inercia del disco respecto del eje
que pasa por su diametro y es normal al plano inclinado, Ic es el momento de inercia
respecto del eje que pasa por el centro de masa del disco y es normal a el, y α es el angulo
de inclinacion del plano.
Ejemplo 2
Ası como vimos un ejemplo de vınculos holonomos que involucro a un pendulo, pode-
mos encontrar tambien ejemplos de vinculos no holonomos cuyos obejtos son pendulos.
Veremos aquı un ejemplo:
d
l l
m m
k
Figura 4.5: Problema de dos pendulos unidos
Consideremos dos pendulos iguales que realizan pequenas oscilaciones, acoplados por
un resorte de masa despreciable. Supondremos que
ν1(0) = ν1(0) = ν2(0) = 0 y ν2(0) = a
Tenemos aquı que
µ1 = l sen σ1
µ2 = l sen σ2
Lo que significa que para angulos σ1 y σ2 pequenos tendremos µ1 = lσ1 y µ2 = lσ2. Por
otro lado, para poder conocer el Lagrangiano del sistema planteamos primero las energıas
potencial y cinetica, que sera donde se reflejaran los vınculos. Para la energıa cinetica K
tendremos que
K =1
2ml
2(σ21 + σ
22)
30

y para la energıa potencial2 V (que sera la suma de las energıas potenciales de cada
pendulo), tendremos luego de algunos calculos, que
V =k
2(µ2 − µ1)
2 −mgl[cos(σ2) + cos(σ1)]
y ası, teniendo en cuenta que
m
2(µ2
1 + µ22) =
1
2ml
2(σ21 + σ
22)
el lagrangiano del sistema sera
L =m
2(µ2
1 + µ22) −
(
k
2(µ2 − µ1)
2 −mgl[cos(σ2) + cos(σ1)]
)
2Se considera el plano que sostiene los pendulos como el 0 del potencial.
31

4.3. Desplazamientos virtuales
Las restricciones sobre un sistema mecanico pueden ser debidas a interacciones de
partes del sistema tanto entre sı como con objetos externos no considerados en la defini-
cion de L ni en el espacio de configuraciones Q. Estas interacciones dan lugar a fuerzas
no conside-radas en el lagrangiano L del sistema, que llamaremos fuerzas del vınculo
o fuerzas que realizan el vınculo. El lector puede referirse al trabajo de C.M. Marle
[11] para tener una vision mas amplia de estos conceptos.
Antes de estudiar la formulacion lagrangiana de sistemas no holonomos recordaremos
algunas definiciones que nos seran de mucha utilidad.
Consideremos un sistema mecanico con restricciones dadas por (q, v) ∈ C para Cuna subvariedad de TQ localmente definida como ceros de ciertas k-funciones suaves
ϕi(q, v) = 0 para i = 1, . . . , k. Llamaremos S(TQ)|C al espacio de campos vectoriales
especiales sobre TQ restringidos a C.
Definicion 4.3.1. Llamaremos S(C) al conjunto de campos vectoriales que generan ladinamica del sistema y que son compatibles con las restricciones:
S(C) := X ∈ S(TQ)|C : dϕi(X) = 0 para i = 1, · · · , k
Definicion 4.3.2. Dado un sistema mecanico sobre una variedad de configuraciones Qcuyas restricciones estan dadas por una subvariedad C de TQ, los desplazamientos
virtuales en (q, v) ∈ C son los vectores w ∈ TqQ tales que (0, w) ∈ T(q,v)C.
Vale recordar que tradicionalmente los desplazamientos virtuales fueron definidos co-
mo los vectores tangentes a la variedad de configuraciones tales que las restricciones eran
satisfechas. Cuando las restricciones son lineales en las velocidades, la definicion que hemos
presentado aquı coincide con la clasica.
Cuando trabajamos con sistemas mecanicos holonomos, tendremos D(q,v) = Cq. El lec-
tor puede referirse a [15] para una explicacion mas detallada de la definicion anterior.
Notemos que como nos interesaran curvas en TQ que sean levantadas de curvas en Q,
llamaremos a los elementos de TQ tanto (q, v) como (q, q).
En terminos de dϕi, la definicion anterior es equivalente a la siguiente:
Definicion 4.3.3. Definimos el espacio de desplazamientos virtuales para (q, v) ∈ Ccomo
D(q,v) := u ∈ TqQ : dϕi(q,v)τ(u) = 0 for i = 1, · · · , k
Cuando no haya lugar a confusion, omitiriemos el subındice (q, v).
Propiedad 4.3.1. En cada (q, v) ∈ C,
X, Y ∈ S(C)(q,v) ⇔ τ−1(X − Y ) ∈ D(q,v) (4.1)
32

Demostracion. Si X, Y ∈ S(C)(q,v) sabemos que ambos campos son especiales y por lo
tanto su resta sera vertical. Por otro lado, dϕiX = dϕ
iY = 0 y ası
dϕi[(X − Y )(q, v)] = 0 ∀i = 1, . . . , k
Teniendo en cuenta ahora la definicion del espacio de desplazamientos virtuales,
τ−1[X − Y ](q, v) ∈ D(q,v)
y como las implicaciones anteriores valen en ambos sentidos, podemos afirmar que
X, Y ∈ S(C)(q,v) ⇔ τ−1(X − Y ) ∈ D(q,v)
Se puede ver en ([17]) que bajo nuestras hipotesis, el espacio S(C)(q,v) es no vacıo.
Definicion 4.3.4. Decimos que una restriccion es admisible si en cada (q, v) ∈ C setiene
dim(spandϕi(q, v)) = k
Supondremos en este trabajo que los vınculos son admisibles. Teniendo en cuenta esto,
podremos afirmar que la dimension del espacio D(q,v) es n− k.
Propiedad 4.3.2. Sea X ∈ S(C). Vale que
Z ∈ S(C) ⇔ X − Z = τ(Y )
para algun campo Y ∈ Q tal que Y (q) ∈ Dq para todo q ∈ Q.
Esta propiedad sera de gran importancia a la hora de mostrar existencia y unicidad de la
solucion de sistemas mecanicos con vınculos.
Finalmente, podemos ver que cuando los sistemas son lineales el espacio de desplaza-
mientos virtuales coincide con el espacio de velocidades permitidas:
Propiedad 4.3.3. Cuando las funciones que nos determinan la distribucion C sean lin-eales en las velocidades tendremos que Cq = Dq.
Demostracion. En efecto, supongamos que las restricciones estan dadas por k funciones
ϕj(q, v) = Blj(q)v
l
y consideremos un vector tangente u = uk ∂
∂qk . Calculamos el diferencial de cada ϕj tie-
niendo
dϕj =∂B
lj
∂qidq
iv
l +Blj(q)dv
l
33

tendremos entonces las siguientes implicaciones para todo j = 1, . . . , k
u ∈ Dq ⇔ dϕj(τu) = 0
⇔ dϕj(uk ∂
∂vk) = 0
⇔
[
∂Blj
∂qiv
ldq
i +Blj(q)dv
l
]
(
uk ∂
∂vk
)
= 0
⇔[
Blj(q)dv
l]
(
uk ∂
∂vk
)
= 0
⇔ Blj(q)u
k = 0
⇔ ϕ(q, u) = 0
⇔ (q, u) ∈ C
Por lo que podemos afirmar que
u ∈ Dq ⇔ (q, u) ∈ C
y por ello, que D = C.
34

Capıtulo 5
Formulacion lagrangiana de sistemas
no holonomos clasicos
Consideremos un sistema mecanico con espacio de configuraciones Q , Lagrangiano
L : TQ→ R y restricciones
(q(t), q(t)) ∈ C (5.1)
5.1. Marco geometrico
Teniendo en cuenta la relacion directa que existe entre la 2-forma lagrangiana ΩL y el
producto interno < ·, · >M , definido en el Capıtulo 3, se puede mostrar que
Propiedad 5.1.1. Si consideramos el producto interno < ·, ·. >M inducido por la matrizM asociada a la 2-forma ΩL, se puede probar que para u ∈ V(q,v)
ΩL(u, w) =< τ−1u, π∗w >M ∀w ∈ T(q,v)(TQ)
Demostracion. En efecto, consideremos u ∈ V(q,v) ⊂ Tv(TqQ). Luego, podemos llamar
y al vector en TqQ asociado a u de modo que y = yi ∂∂qi y u = τ(y). Utilizando ahora la
expresion local de ΩL tendremos que
ΩL(u, w) =
(
∂2L
∂qj∂vidq
i ∧ dqj −∂
2L
∂vj∂vidq
i ∧ dvj
)
(u, w)
=
(
∂2L
∂vj∂vi
)
(yi)(π∗w)j
=
(
∂2L
∂vj∂vi
)
(τ−1(u))i(π∗w)j
por lo que podemos afirmar que
ΩL(u, w) =< τ−1u, π∗w >M ∀w ∈ T(q,v)(TQ)
35

La propiedad anterior puede ser considerada para campos vectoriales pues en tal caso,
en cada punto, valdrıa la igualdad mostrada.
Observacion 5.1.1. [17]
F ∈ H1(TQ) ⇔ XF ∈ V(TQ) (5.2)
Demostracion. En efecto, si F ∈ H1 podemos definir el campo Y ∈ X(TQ) como el
campo que satisface para todo u ∈ TqQ y (q, v) ∈ TQ
< Y (q, v), u >M= F (u)
por la propiedad anterior aplicada a campos, tendremos que XF = τ(Y ) y por lo tanto
XF es un campo vertical sobre TQ.
Por otro lado, si tomamos ahoraX ∈ V(TQ) podemos considerar la 1-forma F definida
como
F (u) =< [τ−1Z](q, v), π∗u >M
de modo que resulta Z = XF y como F solo depende de π∗u tendremos que F se anula
en cualquier vector vertical, y con ello F ∈ H1(TQ).
Hemos visto en el capıtulo anterior que si llamamos XL al generador de la dinamica
de un sistema con lagrangiano L para el cual no hay fuerzas externas que actuen, al
agregarsele una fuerza externa F e tendremos que el nuevo generador de la dinamica es el
campo vectorial XU dado por
XU := XL +XF e (5.3)
Observacion 5.1.2. Como XL ∈ S(TQ) se puede deducir de (5.2) que para cualquierfuerza F -vista como 1-forma horizontal-, XL +XF ∈ S(TQ).
Si tanto una fuerza externa F e como una fuerza de vınculos F c actuan sobre el sistema,
podemos pensar en un sistema irrestricto sobre el cual actua una fuerza F c +Fe en lugar
de F e. Estamos en condiciones ahora de presentar el Principio de d’Alember para sistemas
con restricciones.
Principio de D’Alembert La dinamica de un sistema con restricciones como en
(5.1) es generada por el unico campo vectorial XR ∈ X(TQ)|C tal que para cada (q, v) ∈ Cse tiene que para todo w ∈ T(q,v)(TQ) vale
ΩL(XR(q, v), w) = (dEL + Fe + F
c)(w) (5.4)
36

5.1.1. Principio de los trabajos virtuales
Estudiaremos ahora algunas ideas que diferencian a los sistemas no holonomos clasicos
de los generalizados. En particluar, introduciremos el Principio de los trabajos virtualesque se satisface en los sistemas clasicos pero no generalizados.
Vınculos ideales
Definicion 5.1.1. Los vınculos cuyas fuerzas de vınculo F c no realizan trabajo sobre losdesplazamientos virtuales son llamados ideales. En tal caso, diremos que F c no realizatrabajo virtual .
Dado un subespacio S(q,v) ⊂ TqQ para cualquier (q, v) ∈ C llamaremos
S0 := F ∈ H1(TQ) : F (q, v).(u) = 0 para cada (q, v) ∈ C y ∀u ∈ S(q,v)
Principio de los trabajos virtuales
Consideremos un sistema mecanico sobre una variedad de configuraciones Q cuyas
restricciones estan dadas por una subvariedad C de TQ.
Si FR es la fuerza del vınculo de nuestro sistema, el Principio de los trabajos
virtuales asegura que
FR(u) = 0 ∀u ∈ Dq ∀q ∈ Q
En otras palabras, este principio afirma que las fuerzas del vınculo no realizan trabajo
sobre los desplazamientos virtuales.
Definicion 5.1.2. Si el Principio de los trabajos virtuales es valido, diremos que nuestrosistema es ideal
Observacion 5.1.3. Se muesra en [18] que para sistemas ideales existe una unica fuerzaque realiza los vınculos F c ∈ D0 y de allı, un unico campo vectorial XR ∈ S(C) compatiblecon las restricciones, solucion de (5.2). en este caso XR := XU +XF c.
Cuando un sistema no es ideal pero se conoce el trabajo que realiza Fc sobre los
desplazamientos virtuales se puede cambiar la ecuacion (5.4) por
ΩL(XR(q, v), w)− dEL(w) = (F c + Fe)(π∗w)
para todo w ∈ T(q,v)(TQ) de modo que π∗w ∈ D(q,v).
Un problema que surge en este caso es que la fuerza FR no es conocida. Por esta razon,
son de gran importancia los metdos desarrollados para encontrar FR.
37

5.1.2. Proyecciones M-ortognales
Consideraremos ⊥ el complemento M-ortogonal1 en TqQ. Podemos escribir entonces,
para cada (q, v) ∈ C, al espacio tangente como se satisface que
TqQ = D(q,v) ⊕D⊥(q,v) (5.5)
Llamaremos ΠD a la proyeccion sobre D(q,v) de TqQ y ΠD⊥ su proyeccion sobre D⊥(q,v).
ΠD : TqQ→ D(q,v)
ΠD⊥ : TqQ→ D⊥(q,v)
Por otro lado, definimos los espacios D⊥ y D del siguiente modo
D⊥ : = X : C → TQ : X(q, v) ∈ D⊥(q,v)
D : = X : C → TQ : X(q, v) ∈ D(q,v)
y el espacio D⊥q como
D⊥q : = u ∈ TqQ :< u, v >M= 0 ∀v ∈ Dq
Recordemos que como el espacio de desplazamientos virtuales D(q,v) ⊂ TqQ para
cualquier (q, v) ∈ C podemos definir D. Tenemos entonces la siguiente propiedad (asum-
iendo que el principio de los trabajos virtuales es valido):
Propiedad 5.1.2.
F ∈ D ⇔ YF = τ−1(XF ) ∈ D⊥
Demostracion. En efecto, sabemos que F ∈ D si y solo si es una 1-forma horizontal tal
que para todo q ∈ Q y para todo v ∈ Dq se tiene que
F (v) = 0
Por la definicion de XF , esto sucede si y solo si para todo q ∈ Q y para todo v ∈ Dq se
tiene
ΩL(XF (q), v) = 0
y por ser XF vertical, teniendo en cuenta la expresion local en coordenadas de ΩL, esto
sucedera si y solo si∂
2L
∂vi∂vj(YF )i
vj = 0 = Mij(YF )i
vj
lo que es equivalente a pedir que para todo q ∈ Q y para todo v ∈ Dq
< YF (q), v >M= 0
que sucede si y solo si ∀ q ∈ Q, YF ∈ D⊥q si y solo si
YF ∈ D⊥
1i.e. el complemento asociado al producto interno < ·, · >M .
38

5.2. Existencia y unicidad de soluciones
Estudiaremos ahora una interpretacion geometrica de la existencia y unicidad de la
solucion de sistemas mecanicos ideales desde un punto de vista que sera en cierto modo
equivalente al que emplearemos para estudiar sistemas mecanicos no holonomos genera-
lizados. La idea aquı sera caracterizar al generador de la dinamica de un sistema ideal y
luego ver que este debe ser unico.
Definiremos las proyecciones M-ortogonales sobre campos del siguiente modo
ΠDY (q) = ΠDq(Y (q))
Observacion 5.2.1. Para todo q ∈ Q e Y ∈ X(Q) se tiene que
ΠDY (q) ∈ Dq
Proposicion 5.2.1. Sea un campo X0 ∈ S(C)2 fijo. Luego, si para YL ∈ X(Q)
XL = X0 + τ(YL)
entonces el generador de la dinamica del sistema con restricciones ideales sera el unico
XR = X0 + τ(ΠDYL)
Demostracion. Mostrar existencia y unicidad del campo generador de la dinamica del
sistema sera equivalente a mostrar que existe una unica fuerza FR ∈ D que realiza los
vınculos y que hara que, si XL es el generador de la dinamica del sistema irrestricto,
nuestro nuevo y unico generador de la dinamica del sistema con restricciones sea
XR = XL −XF R
Existencia. Definimos FR de modo que el campo XF R sea el campo vertical
XF R = τ(ΠD⊥YL)
estamos seguros de que podemos hacer esto pues, utilizando la Propiedad 5.1.2,
tenemos que como
τ−1 (τ(ΠD⊥YL)) = ΠD⊥YL ∈ D⊥
o lo que es equivalente τ−1(XF R) ∈ D⊥, entonces FR ∈ D.
Por otro lado calculamos la resta XL −XF R,
XL −XF R = X0 + τ(YL) − τ(ΠD⊥YL)
= X0 + τ(ΠDYL) + τ(ΠD⊥YL) − τ(ΠD⊥YL)
= X0 + τ(ΠDYL)
2Se puede ver que el resultado que mostraremos no depende de la eleccion de X0. Por otro lado, sepuede elegir el campo X0 ∈ S(C) pues bajo la hipotesis de admisibilidad, S(C) es no vacıo.
39

Como sabemos que X0 ∈ S(C) es un campo especial que satisface las restricciones y
como ΠDYL ∈ D en cada punto de C, por la definicion de desplazamientos virtuales,
sabemos que para cada (q, v) ∈ C
(0,ΠDYL) = τ(ΠDYL) ∈ T(q,v)(C)
Podemos afirmar entonces que X0 + τ(ΠDYL) ∈ S(C) y por lo tanto
XL −XF R ∈ S(C)
y como ya vimos que FR ∈ D podemos asegurar que
XR = XL −XF R
es el campo vectorial buscado y con ello hemos probado su existencia. Veamos ahora
que XR es unico.
Unicidad. Supongamos que existe otra fuerza F ∈ D tal que
XU = XL −XF ∈ S(C)
Como XR ∈ S(C) tendremos que la diferencia de estos dos campos sera
XR −XU = XL −XF R −XL +XF
= XF −XF R
= XF−F R
y por la ecuacion (4.1) sabemos que ∀ (q, v) ∈ C, vale que τ−1(XR−XU ) ∈ D(q,v).
Luego, podremos escribir
XF−F R = τ(Y ) (5.6)
para cierto campo Y tal que para todo q ∈ Q se tenga Y (q) ∈ Dq.
Por otro lado, utilizando nuevamente la Propiedad 5.1.2 tenemos que como
F − FR ∈ D (pues F , FR ∈ D), entonces τ−1(XF−F R) ∈ D⊥. Pero a su vez
τ−1(XF−F R) = τ
−1(τ(Y ))
= Y (5.7)
Uniendo los resultados obtenidos en (6.3) y (6.4) tenemos que para cada q ∈ Q
Y (q) ∈ Dq
Y (q) ∈ D⊥q
40

y por lo tanto ∀ q ∈ Q se debe tener que
Y (q) = 0
De este modo, XF−F R ≡ 0 y por lo tanto
F = FR
Podemos afirmar entonces que la fuerza FR es unica y por lo tanto, que el campo
XR es unico.
Independencia de la eleccion de X0. Finalmente, veamos ahora que nuestra
demostracion no depende de la eleccion del campo X0 ∈ S(C).
Si tomamos otro campo X0 ∈ S(C) de modo que para cierto YL que en cada punto
q ∈ Q esta en Dq
XL = X0 + τ(YL)
podremos definir una nueva fuerza FR tal que
XF R = τ(ΠD⊥ YL)
Por otro lado, recordando que la aplicacion τ es lineal, podemos calcular
τ(YL − YL) = X0 − X0
De este modo, YL − YL = τ−1(X0 − X0) esta en Dq para cada q ∈ Q y ası
ΠD⊥(YL − YL) = 0 ,
por lo que tienen igual componente ortogonal. Esto es,
ΠD⊥(YL) = ΠD⊥(YL)
y por lo tanto
FR = F
R
que es lo que querıamos mostrar.
Se puede deducir facilmente ahora que
Corolario 5.2.1. Bajo las hipotesis de la proposicion anterior, XR es el unico campovectorial especial en C tal que
τ−1(XR −XU) ∈ D⊥
41

5.3. Principio de Gauss de mınima accion
Consideremos un sistema mecanico con espacio de configuraciones Q y lagrangiano L.
Sabemos que si restringimos el sistema, y llamamos FR a la fuerza del vınculo, entonces
la dinamica del sistema estara dada por el campo XR tal que
XR = XL −XF R
con iXF R
ΩL = FR y iXL
ΩL = dEL. Si el principio de los trabajos virtuales es valido, se
busca caracterizar de entre todas las 1-formas F tales que XL − XF ∈ S(W ), a FR. La
respuesta a esta busqueda la da el Principio de Gauss de mınima accion.
Principio de Gauss de mınima accion El generador XR de la dinamica de un
sistema con restricciones ideals es el unico campo vectorial sobre C tal que para todo
(q, v) ∈ C‖τ−1((XR −XU)(q, v))‖M = ınf
X∈ S(C)‖τ−1((X −XU)(q, v))‖M
donde ‖ · ‖M es la norma asociada a < ·, · >M .
Demostracion. Por la linealidad de τ−1 podemos afirmar que en cada (q, v) ∈ C vale que
τ−1((X −XU)(q, v)) = τ
−1((X −XR)(q, v)) + τ−1((XR −XU)(q, v))
Recordemos ahora que como X,XR ∈ S(C), por la Propiedad 4.3.1 sabemos que
τ−1((X −XR)(q, v)) ∈ D(q,v).
Por otro lado sabemos por el Corolario 5.2.1 que τ−1((XR −XU)(q, v)) ∈ D⊥(q,v). Ten-
dremos entonces que ‖τ−1((X −XU)(q, v))‖2M es en cada (q, v) ∈ C igual a
< τ−1(X −XR) + τ
−1(XR −XU), τ−1(X −XR) + τ−1(XR −XU) >M
y por la ortogonalidad entre τ−1((X −XR)(q, v)) y τ−1((XR −XU)(q, v)) sera
‖τ−1((X −XU)(q, v))‖2M = ‖τ−1((X −XR)(q, v))‖2
M + ‖τ−1((XR −XU)(q, v))‖2M
Luego, el mınimo sobre losX ∈ S(C) de ‖τ−1((X−XU )(q, v))‖2M sera en el campo vectorial
X ∈ S(C) que satisfaga el mınimo3 de ‖τ−1((X − XR)(q, v))‖2M . En otras palabras, el
mınimo se alcanzara en X = XR y ası
‖τ−1((XR −XU)(q, v))‖M = ınfX∈ S(C)
‖τ−1((X −XU)(q, v))‖M
3Aunque deberıamos decir ınfimo no nos preocupa escribir mınimo pues ya sabemos que dicho campoXR existe y por lo tanto el ınfimo es alcanzado.
42

5.4. Ejemplo
Para ver un ejemplo de como construir los elementos geometricos para el estudio de
un sistema mecanico con vınculos ideales, consideraremos el trabajo de A.D. Lewis [10]
donde se estudia el problema del disco vertical que rueda. Este es un ejemplo clasico que
ha sido estudiado por muchos autores (entre otros, podemos encontrar los trabajos de
Bloch et al. [4] donde se estudian las simetrıas del disco bajo ciertas restricciones).
En particular, este sera un ejemplo de un sistema en el que aunque las fuerzas externas
no se anulan sobre el espacio de de las velocidades permitidas, como se conoce el traba-
jo que hacen sobre este espacio, se utiliza este ultimo dato para poder encontrar ası las
ecuaciones de movimiento.
El problema puede describirse por la siguiente figura:
R
z
x
y
0
Figura 5.1: Problema del disco
y tiene a la variedad Q = IR2 × S1 × S
1 como espacio de configuraciones.
Del mismo modo en que planteamos el sistema del disco en un plano inclinado en
el Capıtulo 4, consideraremos el angulo de inclinacion α = 0 y plantearemos nuestro
nuevo sistema buscando ahora encontrar los elementos que desarrollamos en este capıtulo.
Consideraremos el caso de energıa potencial nula. El lagrangiano L del sistema, dado por
la energıa cinetica, sera
L =1
2
(
m(x2 + y2) + Jθ
2 + Iφ2)
Aquı, m es la masa del disco, J > 0 es el momento de inercia del disco respecto del
eje z que pasa por su diametro y es normal al plano (que antes llamamos Id), I > 0 es el
momento de inercia respecto del eje que pasa por el centro de masa del disco y es normal
al el (que antes llamamos Ic).
Tendremos entonces la siguiente matriz de inercia M de nuestro sistema, que nos
servira para crear el producto interno < ·, · >M :
43

M =
m 0 0 0
0 m 0 0
0 0 J 0
0 0 0 I
La condicion de que el disco no se deslize esta dada por las siguientes restricciones
sobre las velocidades:
x = r cos θφ y y = r sin θφ (5.8)
Notemos que en este caso, como las restricciones son lineales en las velocidades, tanto
el espacio de los desplazamientos virtuales D como el de las restricciones C seran iguales.
Tenemos entonces que en cada q ∈ Q
TqQ = Dq ⊕D⊥q
Se puede ver entonces que el subespacio D de TQ de las restricciones esta generada por
los siguientes vectorees ortogonales:
d1 =∂
∂θy d2 =
∂
∂φ+ r cos θ
∂
∂x+ r sin θ
∂
∂y
Esta base nos sera de utilidad a la hora de querer proyectar vectores sobre D ya que
lo haremos tomando el producto < ·, · >M entre los vectores que queremos proyectar y
nuestra base ortogonalizada.
Por otra parte, en el sistema actuaran dos fuerzas que haran que el disco ruede o
que gire sobre su propio eje. Estas fuerzas las podemos ver como 1-formas sobre T ∗Q del
siguiente modo
F1 = dφ y F
2 = dθ
para poder encontrar los campos vectoriales Y ′1 e Y ′
2 en TQ asociados a estas fuerzas,
utilizamos la ley de Newton para saber que
Y1 =1
I
∂
∂φy Y2 =
1
J
∂
∂θ
Hemos visto antes que para poder estudiar un sistema no holonomo, necesitamos que
las fuerzas externas se anulen sobre D (que esten en D) o conocer el trabajo que realizan
sobre D. En este caso, supondremos que conocemos el trabajo que las fuerzas realizan
sobre D. Proyectamos entonces ambas fuerzas ortogonalmente a D (observemos que Y2
ya toma valores en D ). Tendremos, por lo tanto, que los nuevos campos que representan
a las fuerzas F 1 y F 2 sobre D seran Y1 e Y2(= Y2) dados por
Y1 =1
I +mr2
(
∂
∂φ+ r cos θ
∂
∂x+ r sin θ
∂
∂y
)
Y2 =1
J
∂
∂θ
44

Esto ultimo se puede interpretar del siguiente modo. Si consideramos F la fuerza que re-
aliza los vınculos dados por las igualdades en la ecuacion (5.8) -que satisfacen el principiode los trabajos virtuales- , FC la fuerza que realiza a las dos rotaciones, y q = (x, y, θ, φ),
tendremos que
mq = F + Fc
y entonces obtenemos los campos asociados en TQ dados por
q = m−1F +m
−1F
c
donde
m−1F
c = u1Y1 + u2Y2
para (u1, u2) ∈ IR2. Si tomamos ahora el producto interno asociado a M , y recordamos
que F se anula sobre D, tendremos que
< q, d >M=< m−1F
c, d >M ∀d ∈ D (5.9)
que junto a las restricciones de la la ecuacion (5.8) nos determinan el sistema. La igualdad
(5.9) puede desglosarse del siguiente modo
< (x, y, θ, φ), d1 >M = < u1Y1 + u2Y2, d1 >M (5.10)
< (x, y, θ, φ), d2 >M = < u1Y1 + u2Y2, d2 >M (5.11)
A partir de las ecuaciones (5.8), (5.10) y (5.11), se pueden encontrar las ecuaciones
de movimiento restringidas a D para luego ser resueltas:
x+ r sin θφθ =r cos θ
I +mr2u
1
y − r cos θφθ =r sin θ
I +mr2u
1
θ =1
Ju
2
φ =1
I +mr2u
1
45

Capıtulo 6
Formulacion lagrangiana de sistemas
mecanicos no holonomos
generalizados
Tradicionalmente, se ha supuesto que los sistemas mecanicos con vınculos satisfacen el
Principio de los trabajos virtuales. Pero para muchos sistemas mecanicos de gran interes,
este principio no se verifica (por ejemplo cuando las restricciones se realizan por la accion
de servo mecanismos [11]). Para el estudio de estos sistemas particulares, Marle introdujo
en su trabajo [11] la nocion de Sistemas no holonomos generalizados. Mientras que
el estudio de Marle fue realizado desde un punto de vista Hamiltoniano, en esta seccion
estudiaremos algunos resultados estudiados en [3] desde un punto de vista lagrangiano,
para poder comparar este analisis con el de sistemas no holonomos clasicos realizado en
el capıtulo anterior.
6.1. Marco geometrico
Consideraremos un sistema mecanico restringido para el cual, en cada punto (q, v) ∈ Cse sabe que la fuerza del vınculo FC se anula sobre un subespacio de TqQ que puede ser
diferente de D(q,v), que llamaremos W(q,v)1. Llamaremos
W := X : C → TQ : X(q, v) ∈ Wq,v
6.1.1. Proyecciones M-ortognales
Denotaremos ⊥ el complemento M-ortogonal en TqQ, y supondremos que para todo
(q, v) ∈ C, W(q,v) satisface que
TqQ = D(q,v) ⊕W⊥(q,v) (6.1)
Observacion 6.1.1. Como podemos ver, para los sistemas no holonomos clasicos en queD(q,v) = W(q,v), la propiedad (6.1) es valida.
1Una diferencia importante entre Wq,v y D(q,v) es que solo el ultimo de ellos puede ser deducido derestricciones cinematicas.
46

Como antes, llamaremos ΠD a la proyeccion sobre D(q,v) de TqQ y ΠW⊥ su proyeccion
sobre W⊥(q,v). Definimos ademas los espacios W⊥ y D del siguiente modo
W⊥ : = X : C → TQ : X(q, v) ∈ W⊥q,v
D : = X : C → TQ : X(q, v) ∈ Dq,v
6.2. Existencia y unicidad de soluciones
Sabemos ya que para que las restricciones sean satisfechas, o lo que es equivalente,
para que el generador de la dinamica del sistema XR ∈ S(C), la fuerza del vınculo Fc
debe satisfacer
XR = XU +XF c ∈ S(C) (6.2)
Como en el caso de los sistemas no holonomos clasicos, se puede ver que
Proposicion 6.2.1. Si F ∈ S(C) entonces
F ∈ W0 ⇔ τ−1(XF ) ∈ W⊥
Demostracion. En efecto, sabemos que F ∈ W si y solo si es una 1-forma horizontal
tal que para todo q ∈ Q y para todo v ∈ Wq se tiene que
F (v) = 0
Por la definicion de XF , esto sucede si y solo si para todo q ∈ Q y para todo v ∈ Wq se
tiene
ΩL(XF (q), v) = 0
y por ser XF vertical, teniendo en cuenta la expresion local en coordenadas de ΩL, esto
sucedera si y solo si∂
2L
∂vi∂vj(YF )i
vj = 0 = Mij(YF )i
vj
lo que es equivalente a pedir que para todo q ∈ Q y para todo v ∈ Wq
< YF (q), v >M= 0
que sucede si y solo si ∀ q ∈ Q, YF ∈ W⊥q si y solo si
YF ∈ W⊥
47

Proposicion 6.2.2. Sea un campo X0 ∈ S(C)2 fijo. Si XL es el generador de la dinamicadel sistema no restringido, entonces el generador de la dinamica del sistema con restric-ciones sera el unico
XR = X0 + τ(ΠW⊥(τ−1(XL −X0)))
Demostracion. Mostrar existencia y unicidad del campo generador de la dinamica del
sistema sera, como antes, equivalente a mostrar que existe una unica fuerza FR ∈ W que
realiza los vınculos y que hara que, si XL es el generador de la dinamica del sistema no
restringido, nuestro nuevo y unico generador de la dinamica del sistema con restricciones
sea
XR = XL −XF R
Existencia. Definimos FR de modo que el campo XF R sea el campo vertical que
cumple
XF R = τ(ΠW⊥(τ−1(XL −X0)))
estamos seguros de que podemos hacer esto pues, utilizando la Proposicion 6.2.1,
tenemos que como
τ−1
(
τ(ΠW⊥(τ−1(XL −X0))))
= ΠW⊥(τ−1(XL −X0)) ∈ W⊥,
o lo que es equivalente τ−1(XF R) ∈ W⊥, entonces FR ∈ W.
Por otro lado calculamos la resta XL −XF R teniendo en cuenta que como XL y X0
son campos vectoriales especiales, XL−X0 es vertical -pudiendose entonces aplicarle
la funcion τ−1-. Tendremos entonces que
XL −XF R = X0 + (XL −X0) − τ(ΠW⊥(τ−1(XL −X0)))
= X0 + τ(τ−1(XL −X0)) − τ(ΠW⊥(τ−1(XL −X0)))
= X0 + τ(ΠD(τ−1(XL −X0))) + τ(ΠW⊥(τ−1(XL −X0)))
− τ(ΠW⊥(τ−1(XL −X0)))
= X0 + τ(ΠD(τ−1(XL −X0)))
Como sabemos que X0 ∈ S(C) es un campo especial que satisface las restricciones
y como ΠD(τ−1(XL −X0)) ∈ D en cada punto de C, por la definicion de desplaza-
mientos virtuales, sabemos que para cada (q, v) ∈ C
(0,ΠD(τ−1(XL −X0))) = τ(ΠD(τ−1(XL −X0))) ∈ T(q,v)(C)
Podemos afirmar entonces que X0 + τ(ΠD(τ−1(XL −X0))) ∈ S(C) y por lo tanto
XL −XF R ∈ S(C)
2Se puede ver que el resultado que mostraremos no depende de la eleccion de X0. Por otro lado, sepuede elegir el campo X0 ∈ S(C) pues bajo la hipotesis de admisibilidad, S(C) es no vacıo.
48

y como ya vimos que FR ∈ W podemos asegurar que
XR = XL −XF R
es el campo vectorial buscado y con ello hemos probado su existencia. Veamos ahora
que XR es unico.
Unicidad. Supongamos que existe otra fuerza F ∈ W tal que
XU = XL −XF ∈ S(C)
Como antes, como XR ∈ S(C) tendremos que la diferencia de estos dos campos sera
XR −XU = XL −XF R −XL +XF
= XF −XF R
= XF−F R
y por la ecuacion (4.1) sabemos que ∀ (q, v) ∈ C, vale que τ−1(XR−XU ) ∈ D(q,v).
Luego, podremos escribir
XF−F R = τ(Y ) (6.3)
para cierto campo Y tal que para todo q ∈ Q se tenga Y (q) ∈ Dq.
Por otro lado, utilizando nuevamente la Proposicion 6.2.1 tenemos que como
F − FR ∈ W (pues F , FR ∈ W), entonces τ−1(XF−F R) ∈ W⊥. Pero a su vez
τ−1(XF−F R) = τ
−1(τ(Y ))
= Y (6.4)
Uniendo los resultados obtenidos en (6.3) y (6.4) tenemos que para cada q ∈ Q
Y (q) ∈ Dq
Y (q) ∈ W⊥q
y por lo tanto ∀ q ∈ Q se debe tener que
Y (q) = 0
De este modo, XF−F R ≡ 0 y por lo tanto
F = FR
Podemos afirmar entonces que la fuerza FR es unica y por lo tanto, que el campo
XR es unico.
49

Independencia de la eleccion de X0. Finalmente, veamos ahora que nuestra
demostracion no depende de la eleccion del campo X0 ∈ S(C).
Si tomamos otro campo X0 ∈ S(C), podremos definir una nueva fuerza FR tal que
XF R = τ(ΠW⊥(τ−1(XL − X0)))
Recordemos que como X0, X0 ∈ S(C) vale que τ−1(X0 − X0) ∈ D(q,v) para todo
(q, v) ∈ C.
Por otro lado, teniendo en cuenta la linealidad de las proyecciones ortogonales y de
la apliacion τ , podemos calcular
XF R −XF R = τ(ΠW⊥(τ−1(XL −X0))) − τ(ΠW⊥(τ−1(XL − X0)))
= τ(ΠW⊥(τ−1(X0 −X0)))
Ası, como τ−1(X0 −X0) ∈ D(q,v) espacio ortogonal de W⊥, tendremos que
XF R −XF R ≡ 0 ⇔
XF R−F R ≡ 0 ⇔
FR − F
R ≡ 0 ⇔
FR = F
R ⇔
que es lo que querıamos mostrar.
La existencia y unicidad de la fuerza F c de modo que valga (6.2) se puede deducir del
resultado siguiente:
Proposicion 6.2.3. [3] Si la propiedad (6.1) es valida y los vınculos son admisibles,entonces ∀X ∈ S(TQ)|C
∃!FX ∈ W0 : X +XF X ∈ S(C)
Si tomamos X0 un elemento cualquiera fijo en S(C), tendremos que
XF X = −τ(ΠW⊥(τ−1(X −X0))) (6.5)
En particular, XR es el unico campo vectorial en S(C) tal que
τ−1(XR −XU) ∈ W⊥
La demostracion de esta propiedad es muy similar a la demostracion anterior, ya que
en ella solo hemos utilizado del campo XL el hecho de que es especial definido sobre C, o
lo que es lo mismo, XL ∈ S(TQ)|C: bien podrıamos reemplazar XL por un campo X que
satisfaga aquella condicion y tener esta ultima propiedad.
50

Observacion 6.2.1. De las proposiciones sobre existencia y unicidad de la solucion sepuede ver por que es necesario que valga la condicion (6.1). Para poder determinar laaceleracion del sistema restricto, necesitamos n ecuaciones independientes. F c ∈ W0
implica que τ−1(XF c) ∈ W⊥ y la ecuacion (6.1) asegura que eso nos dara n−k ecuaciones,independientes de las k derivadas de las restricciones , i.e. XU +XF R ∈ S(C).
6.3. Principio de Gauss de mınima accion generaliza-
do
Ya hemos visto como el Principio de Gauss de mınima accion caracteriza al generador
XR de sistemas con restricciones ideales. Estudiaremos ahora la generalizacion de este
principio.
Siguiendo la presentacion de [3], consideramos un nuevo producto interno [·, ·](q,v) en
TqQ para cada (q, v) ∈ C de modo que los espacios D(q,v) y W⊥(q,v) sean [·, ·](q,v)-ortogonales.
Su norma asociada sera ‖ · ‖[·,·]. Se puede ver que si vale la condicion (6.1) este nuevo
producto interno existe. Por ejemplo, en tal caso, podrıamos tomar
[u1, u2](q,v) =< ΠDu1,ΠDu2 >M + < ΠW⊥u1,ΠW⊥u2 >M
Utilizando este nuevo producto interno en TqQ podemos presentar ahora la general-
izacion del Principio de Gauss que estudiamos en el capıtulo anterior:
Principio de Gauss de mınima accion generalizado Si la condicion (6.1) es
valida y las restricciones son admisibles, entonces el generador XR de la dinamica del
sistema es el unico campo vectorial especial en C tal que para todo (q, v) ∈ C se tiene
‖τ−1(XR −XU)‖[·,·] = mınX∈S(C)
‖τ−1(X −XU)‖[·,·] (6.6)
Demostracion. Como antes, por la linealidad de τ−1 podemos afirmar que en cada
(q, v) ∈ C vale que
τ−1((X −XU)(q, v)) = τ
−1((X −XR)(q, v)) + τ−1((XR −XU)(q, v))
Recordemos ahora que como X,XR ∈ S(C), por la Propiedad 4.3.1 sabemos que
τ−1((X −XR)(q, v)) ∈ D(q,v).
Por otro lado sabemos por la Proposicion 6.2.2 que τ−1((XR − XU)(q, v)) ∈ W⊥(q,v).
Tendremos entonces que ‖τ−1((X −XU)(q, v))‖2[·,·] es en cada (q, v) ∈ C igual a
< τ−1(X −XR) + τ
−1(XR −XU), τ−1(X −XR) + τ−1(XR −XU) >[·,·]
y por la ortogonalidad entre τ−1((X−XR)(q, v)) y τ−1((XR−XU)(q, v)) en la norma [·, ·]sera
‖τ−1((X −XU)(q, v))‖2[·,·] = ‖τ−1((X −XR)(q, v))‖2
[·,·] + ‖τ−1((XR −XU)(q, v))‖2[·,·]
51

Luego, el mınimo sobre los X ∈ S(C) de ‖τ−1((X −XU)(q, v))‖2[·,·] sera en el campo vec-
torial X ∈ S(C) que satisfaga el mınimo3 de ‖τ−1((X −XR)(q, v))‖2[·,·]. En otras palabras,
el mınimo se alcanzara en X = XR y ası
‖τ−1((XR −XU)(q, v))‖[·,·] = ınfX∈ S(C)
‖τ−1((X −XU)(q, v))‖[·,·]
6.4. Ejemplo
Veamos el caso que estudia C.M. Marle en [11] como ejemplo de un sistema no
holonomo generalizado. Corresponde a una idealizacion del juego en que se trata de man-
tener una vara vertical en equilibrio sobre un dedo que para ello puede moverse.
Supondremos por simplicidad que la vara se mantiene en un plano vertical fijo, y que
el dedo que lo sostiene solo puede moverse en una lınea recta horizontal contenida en
aquel plano. Tomaremos esta lınea como el eje de coordenadas Ox y a la vertical como el
otro eje, Oz.
CM
l
0
Figura 6.1: Problema de la vara
3Nuevamente, aunque deberıamos decir ınfimo no nos preocupa escribir mınimo pues ya sabemos quedicho campo XR existe y por lo tanto el ınfimo es alcanzado.
52

La vara puede rotar alrededor de su punto de contacto con el eje Ox teniendose
entonces como espacio de configuraciones
Q = IR × S1
con coordenadas (x, θ), donde x ∈ IR es la absisa del punto de contacto de la vara con el
eje horizontal, y θ ∈ S1 es el angulo que forma la vara con aquel eje.
Podemos afirmar que, para cierta funcion g suave, nuestro sistema irrestricto satisface
x = g(θ, θ) (6.7)
Suponemos que el mecanismo para mantener el equilibrio4 consiste en imponer que dxdt
sea una funcion de x, θ y dθdt
. En otras palabras, la subvariedad C ⊂ TQ que determina los
vınculos estara dada por
C = (x, θ, x, θ) | x = f(x, θ, θ)
para cierta funcion conocida, suave, f . En otras palabras, tendremos ahora que
x = f(x, θ, θ) (6.8)
La fuerza del vınculo Fc debe acelerar a x de modo de pasar de ( 6.7) a (6.8). En
terminos de 1-formas diferenciales, podemos escribir
Fc = F
cx dx+ F
cθ dθ
Veamos ahora por que es que en el sistema restricto de esta manera no se cumple
el principio de los trabajos virtuales. Para ello, estudiaremos primero el espacio de los
desplazamientos virtuales D.
Recordemos que si las restricciones del sistema5 estan dadas por una funcion
ϕ(x, θ, x, θ) = 0
entonces el espacio de desplazamientos virtuales es, para cada (q, v) ∈ C,
D(q,v) := u ∈ TqQ : dϕi(q,v)τ(u) = 0 para i = 1, · · · , k
En particular, Marle considera el caso
C = (x, θ, x, θ) | x = f(x, θ, θ)
que corresponde a hacer ϕ(x, θ, x, θ) = f(x, θ, θ)− x y que permite calcular su diferencial
dϕ(x, θ, x, θ) =∂ϕ
∂xdx+
∂ϕ
∂θdθ +
∂ϕ
∂xdx+
∂ϕ
∂θdθ
=∂f
∂xdx+
∂f
∂θdθ − dx+
∂f
∂θdθ (6.9)
4Esta estrategia tambien podrıa ser realizada con un servomecanismo.5La subvariedad C de TQ para Q = IR ⊕ S1
53

Por otro lado si dado q = (x, θ) ∈ Q consideramos u ∈ TqQ tendremos que
u = u1 ∂
∂x+ u
2 ∂
∂θy τu = u
1 ∂
∂x+ u
2 ∂
∂θ
de modo que se cumplira que dϕτu = 0 si y solo si
(
∂f
∂xdx+
∂f
∂θdθ − dx+
∂f
∂θdθ
) (
u1 ∂
∂x+ u
2 ∂
∂θ
)
= 0 ⇔
−u1 + u2∂f
∂θ= 0 ⇔
u2∂f
∂θ= u
1
o lo que es equivalente, si y solo si u pertenece al espacio generado por
(
∂f
∂θ
)
∂
∂x+
∂
∂θ= v (6.10)
Podemos concluir entonces que el espacio D esta generado por el vector v dado en
(6.10). Luego, para v ∈ D, la fuerza F c realizara el siguiente trabajo sobre v:
Fc(v) = (F c
x dx+ Fcθ dθ)
(
∂f
∂θ
∂
∂x+
∂
∂θ
)
= Fcx
∂f
∂θ+ F
cθ (6.11)
teniendo entonces que F c(v) 6= 0 siempre que
∂f
∂θ6= −
Fcθ
F cx
Finalmente, podemos ver que el espacio W donde la fuerza del vınculo F c se anula es
W =
v = vx∂
∂x+ vθ
∂
∂θ∈ TxQ | vθ = −
Fcθ
F cx
(6.12)
En particular, Marle elige para la funcion f la siguiente expresion6:
f(x, θ, θ) =ml
2 + I
m(I +ml2 cos2 θ)
(
a
(
θ −π
2
)
−
(
I +ml2 cos2
θ
l(ml2 + I)+ β
)
Pθ
)
(6.13)
Se puede ver que para esta eleccion de f , la fuerza del vınculo F c no se anula sobre
todo el espacio D y por ello no se cumple el principio de los trabajos virtuales, tratandose
entonces de un sistema holonomo generalizado, cuyo espacio W asociado es el dado por
(6.12).
6Estudiaremos esta funcion en las siguientes paginas y por ello ahora no la abordaremos en detalle.
54

Veamos ahora por que Marle ha llegado a la eleccion (6.13) para la funcion f del sis-
tema restricto. Estudiaremos primero el sistema libre de toda restriccion. Las coordenadas
del centro de masa CM de la varilla son
X = x+ l cos θ
Z = l sin θ
La energıa cinetica del sistema es la suma de la de traslacion alrededor del centro de
masa y la de rotacion,
EC =1
2mX
2 +1
2mZ
2 +1
2Iθ
2
=m
2(x− l sin θθ)2 +
m
2l2 cos2
θθ2 +
1
2Iθ
2
=m
2(x2 − 2xl sin θθ + l
2 sin2θθ
2) +m
2l2 cos2
θθ2 +
1
2Iθ
2
=m
2x
2 −mlx sin θθ +ml
2
2θ
2 +1
2Iθ
2
El momento de inercia I que aparece en la formula es el que corresponde a un eje que pasa
por CM y no por el eje instantaneo de rotacion (que pasa por el punto de contacto de la
varilla con el dedo). Puede verse en cualquier libro de mecanica elemental el porque esta
es la forma correcta de escribir la energıa cinetica.
La energıa potencial del sistema es la gravitatoria, escrita en terminos del CM ,
EP = mgl sin θ
El lagrangiano resulta ser entonces
L = EC − EP =m
2x
2 −mlx sin θθ +ml
2
2θ
2 +1
2Iθ
2 −mgl sin θ
Notese que x es una coordenada cıclica (el lagrangiano no depende de ella). Luego, usando
las ecuaciones de Euler-Lagrange
d
dt
∂L
∂x=
∂L
∂x
d
dt
∂L
∂θ=
∂L
∂θ
y teniendo en cuenta que los impulsos son
Px =∂L
∂x
Pθ =∂L
∂θ
55

se tiened
dtPx = 0
por lo que Px es una constante de movimiento que llamaremos A,
Px =∂L
∂x= mx−mlθ sin θ = A (6.14)
En cuanto al impulso Pθ,
Pθ =∂L
∂θ= (ml2 + I)θ −mlx sin θ
de donde tenemos que
Pθ +mlx sin θ
ml2 + I= θ (6.15)
Obtendremos ahora una relacion entre la velocidad x y el momento Pθ. En efecto,
reemplazando (6.15) en (6.14)
mx−ml
(
Pθ +mlx sin θ
ml2 + I
)
sin θ = A
Luegomx(ml2 + I) −mlPθ sin θ +m
2l2x sin2
θ
ml2 + I= A
xm2l2 +mxI −mlPθ sin θ −m
2l2x sin2
θ
ml2 + I= A
mxI −mlPθ sin θ +m2l2x cos2
θ
ml2 + I= A
mI +m2l2 cos2
θ
ml2 + Ix = A+
ml sin θ
ml2 + IPθ
Se tiene finalmentem(I +ml
2 cos2θ)
ml2 + Ix = A +
ml2 sin θ
l(ml2 + I)Pθ (6.16)
Hasta aquı consideramos el problema de la varilla sin que intervenga un agente externo
(movimiento del dedo, servomecanismo) actuando para mantenerla en la posicion vertical.
¿Porque es necesaria la intervencion del agente externo? Porque sin el, la posicion vertical
(θ = π/2) es inestable. Para ver que esto es ası debemos analizar los extremos de la energıa
potencial:
∂EP
∂θ
∣
∣
∣
∣
θeq
= mgl cos θ|θeq= 0 ⇒ θeq =
π
2(6.17)
56

Pero para ese valor de θeq la derivada segunda es negativa,
∂2EP
∂θ2
∣
∣
∣
∣
θ=θeq
= −mglsinθ|θeq= −mgl
Como esta sostenida por el dedo, la varilla solo puede moverse en el semiplano superior
(z > 0) y por eso la ecuacion anterior tiene una sola solucion, la de equilibrio inestable. Si
se tratara de una varilla que rota en todo el plano habrıa una segunda solucion (θeq = 3π/2)
estable, que corresponde a un mınimo de la energıa potencial.
Entonces, si no actua un servomecanismo, una perturbacion arbitrariamente pequena
sacarıa a la varilla de su posicion vertical de equilibrio inestable. Una posibilidad de que
el servomecanismo mantenga vertical a la varilla consiste en que su accion modifique la
relacion entre x y pθ (ecuacion (6.16)) de la siguiente manera (consideraremos angulos
cercanos a θ = π/2)
m(I +ml2 cos2
θ)
ml2 + Ix = a
(
θ −π
2
)
−
(
I +ml2 cos2
θ
l(ml2 + I)+ β
)
Pθ (6.18)
Aquı a es una constante negativa, β positiva y hemos reemplazado sen θ ≈ 1−cos2θ. Esta
funcion f coincide con la utilizada antes en (6.13).
La modificacion importante es el que aparezca en lugar de la constante de movimiento
A (que podıa ser tomada nula) una funcion que cambia de signo segun θ sea mayor o menor
que π/2. El signo negativo de a asegura que si la vara se inclina hacia delante (θ < π/2)
la velocidad x del dedo crece restaurando el equilibrio. Del mismo modo, cuando θ > π/2
la velocidad disminuye y tambien mantiene el equilibrio.
57

Bibliografıa
[1] P. Balseiro, Geometry of generalized nonholonomic mechanical systems, PhD. Thesis.
[2] P. Balseiro and J. Solomin, Orthogonal projections and the dynamics of constrainedmechanical systems, Quaterly of Applied Mathematics.
[3] P. Balseiro and J. Solomin, On generalized non-holonomic systems, (2008)
[4] A.M. Bloch,P.S. Krishnaprasad, J. Marsden and M. Murray, Nonholonomic Mechan-ical systems with symmetry,Arch. Rational Mech. Anal. 136 (1996)
[5] A. Cabrera, Geometric phases in mechanical systems, PhD. Thesis.
[6] A. Cannas da Silva, Lectures on symplectic geometry, Lecture notes in mathematics
1764, Springer.
[7] M.R. Flannery, The enigma of nonholonomic constraints, Am. J. Phys. 73 (3), (2005)
[8] M. Gotay and J. Nester, Presymplectic Lagrangian systems. I: the constraint al-gorithm and the equivalence theorem, Annales de l’I.H.P., section A, tome 30, n2
(1979) p. 129-142.
[9] M. de Leon and D.M. de Diego, On the geometry of non-holonomic Lagrangian sys-tems. J. Math. Phys. 37 (7) (1996).
[10] A.D. Lewis, Simple Mechanical Control Systems with Constraints. IEEE TRANS.
AUT. CONTROL, 45 (8) (2000).
[11] Marle C.M., Various approaches to conservative and non conservative nonholonomicssystems. Rep. Math. Phys 42, 211 (1998).
[12] J. Marsden and T. Ratiu, Symmetry and mechanics. Springer-Verlag (1999).
[13] J. Marsden and R. Abraham , Foundations of Mechanics. Second Edition Addison-
Wesley, California.
[14] S. Morita , Geometry of Differential Forms . Translations of Mathematical Mono-
graphs, Vol. 201, AMS (2001).
[15] Solomin J.E. and M. Zuccalli, A geometric approach to the extended D’Alembertprinciple of Udwadia-Kalaba-Hee-Chang. Quart. Appl. Math. 63, 269 (2005).
58

[16] F.E. Udwadia, Fundamental principles and lagrangian dynamics: mechanical systemswith non-ideal, holonomic, and nonholonomic constraints. J. Math. Anal. Appl. 251,
341 (2000).
[17] A.M. Vershik , Classical and non-classical dynamics with constraints. Lectures Notes
in Mathematics 1108, 278-301, Springer-Verlag (1984).
[18] A.M. Vershik and L. Faddeev, Lagrangian mechanics in invariant form. Problems of
Theoretical Physics 2, (1975)
59