ANÁLISIS Y CONTROL DE SISTEMAS NO LINEALES …usuario.cicese.mx/~lmarquez/docs/TDS.pdf ·...
53
ANÁLISIS Y CONTROL DE SISTEMAS NO LINEALES CON RETARDOS Luis Alejandro Márquez Martínez Departamento de electrónica y telecomunicaciones
Transcript of ANÁLISIS Y CONTROL DE SISTEMAS NO LINEALES …usuario.cicese.mx/~lmarquez/docs/TDS.pdf ·...

ANÁLISIS Y CONTROL DESISTEMAS NO LINEALES CON RETARDOS
Luis Alejandro Márquez Martínez
Departamento de electrónica y telecomunicaciones

Análisis y control de sistemasno lineales con retardos
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Sistemas con retardosSistemas con retardos
• Todo sistema cuya evolución incluye información de su evolución pasada.
• Matemáticamente puede ser modelado por ecuaciones diferenciales y de diferencias.
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Retardos en sistemas físicosRetardos en sistemas físicos
• Fenómenos de transporte
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Retardos en sistemas físicosRetardos en sistemas físicos
• Fenómenos de transporte
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Retardos en sistemas físicosRetardos en sistemas físicos
• Fenómenos de transporte
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Retardos en sistemas físicosRetardos en sistemas físicos
• Tiempos de reacción
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Retardos en sistemas físicosRetardos en sistemas físicos
• Tiempos de reacción
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Retardos en sistemas físicosRetardos en sistemas físicos
• Tiempo de cómputo
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Sistemas con retardos inducidosSistemas con retardos inducidos
Aprovechar la dinámica más rica de los sistemas con retardo
- generación de caos
- estabilización
I. Introducción
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
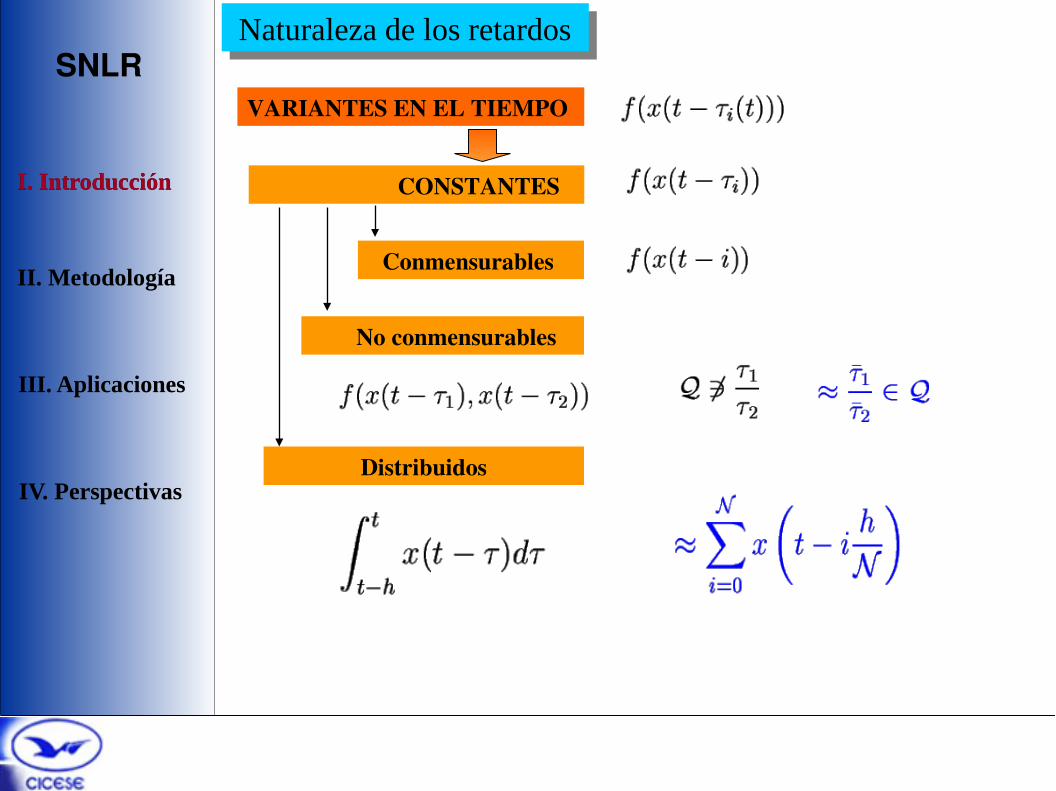
Naturaleza de los retardosNaturaleza de los retardos
VARIANTES EN EL TIEMPO
CONSTANTES
Conmensurables
No conmensurables
Distribuidos
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
MotivationMotivation
Sistemas con retardos + Técnicas estandard
• rendimiento subóptimo• posible fuente de inestabilidad• complicación no siempre necesaria
predictores de estado
=
Soluciones no causales
I. Introducción

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
• Caracterizar de manera constructiva la existencia de soluciones causales a diversos problemas de control
• Estudiar las propiedades de los sistemas no lineales con retardos
ObjetivosObjetivos
I. Introducción
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
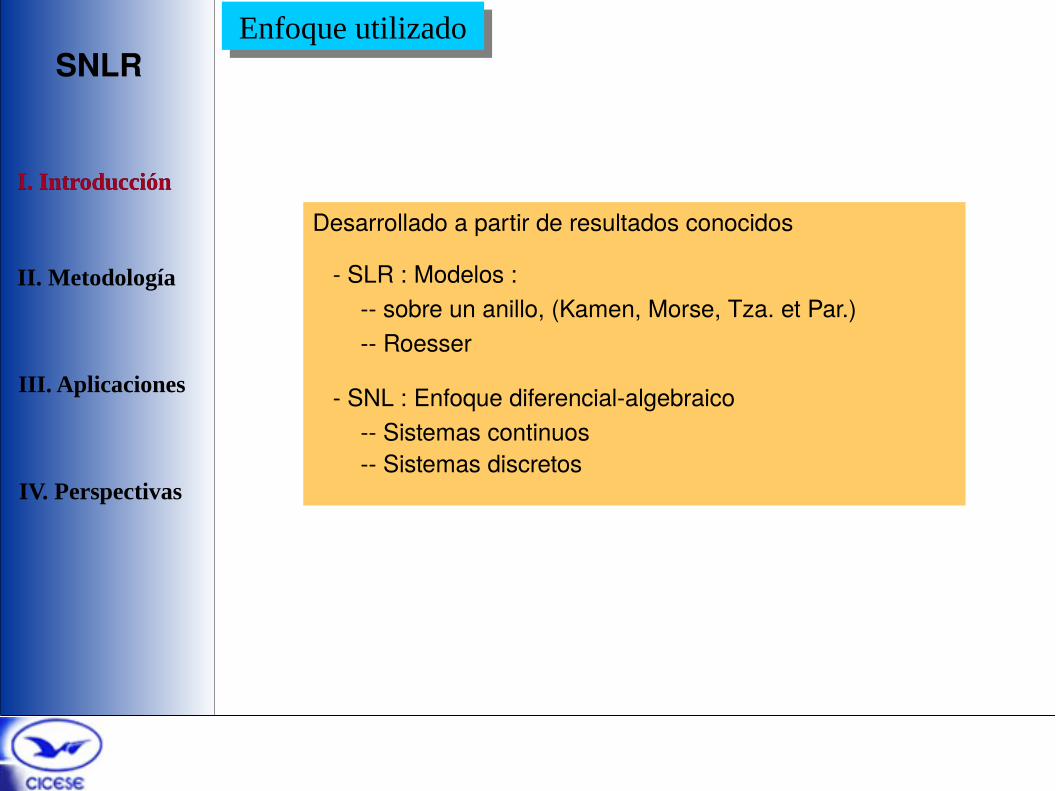
Enfoque utilizadoEnfoque utilizado
Desarrollado a partir de resultados conocidos
- SLR : Modelos : -- sobre un anillo, (Kamen, Morse, Tza. et Par.)-- Roesser
- SNL : Enfoque diferencial-algebraico-- Sistemas continuos-- Sistemas discretos
I. Introducción
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
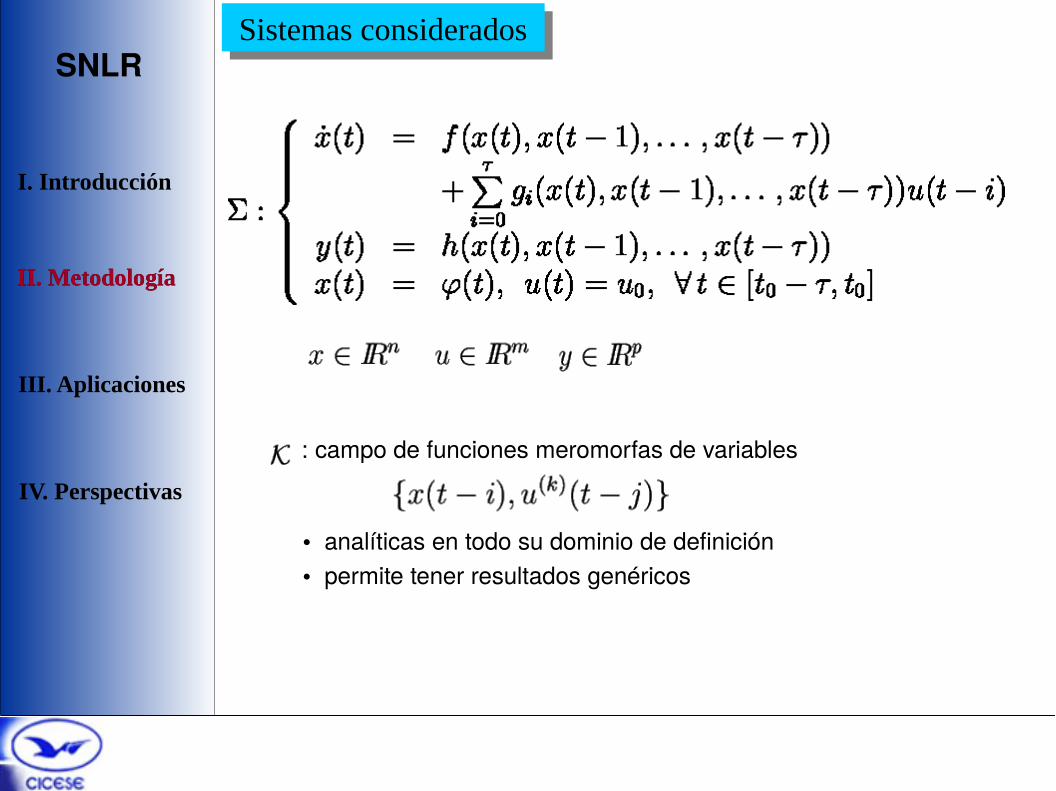
Sistemas consideradosSistemas considerados
: campo de funciones meromorfas de variables
• analíticas en todo su dominio de definición• permite tener resultados genéricos
II. Metodología
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
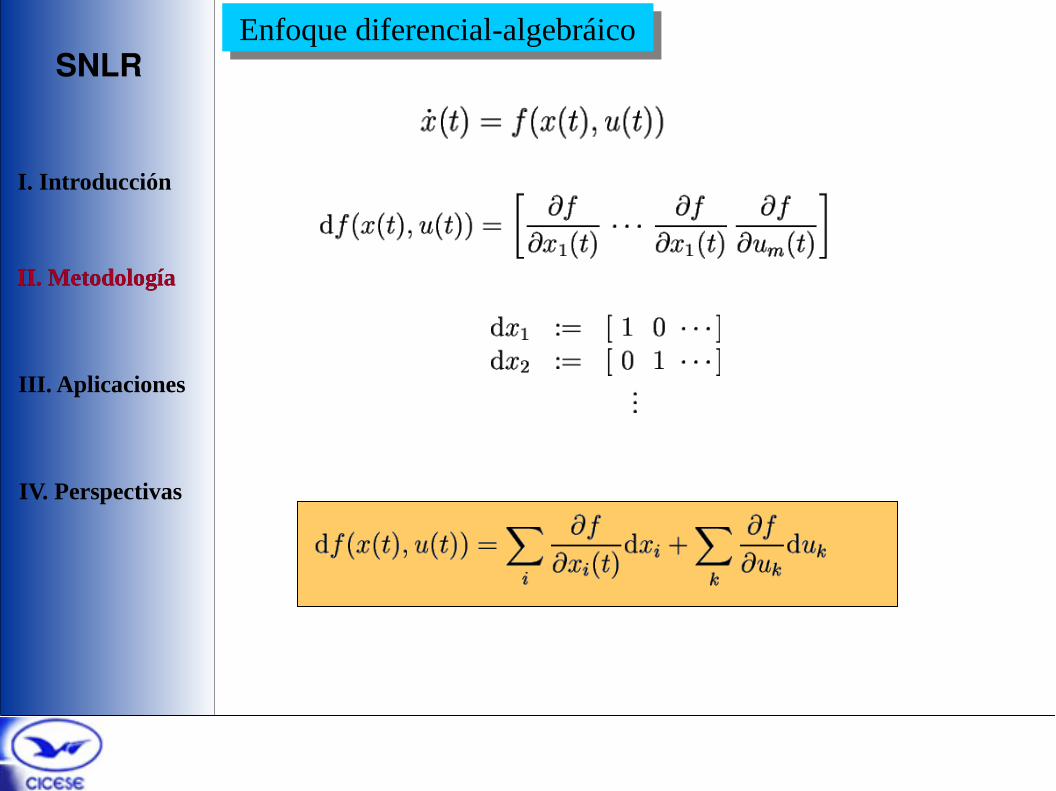
Enfoque diferencial-algebráicoEnfoque diferencial-algebráico
II. Metodología

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Enfoque diferencial-algebráicoEnfoque diferencial-algebráico
II. Metodología

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Generalización a sistemas con retardosGeneralización a sistemas con retardos
II. Metodología

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
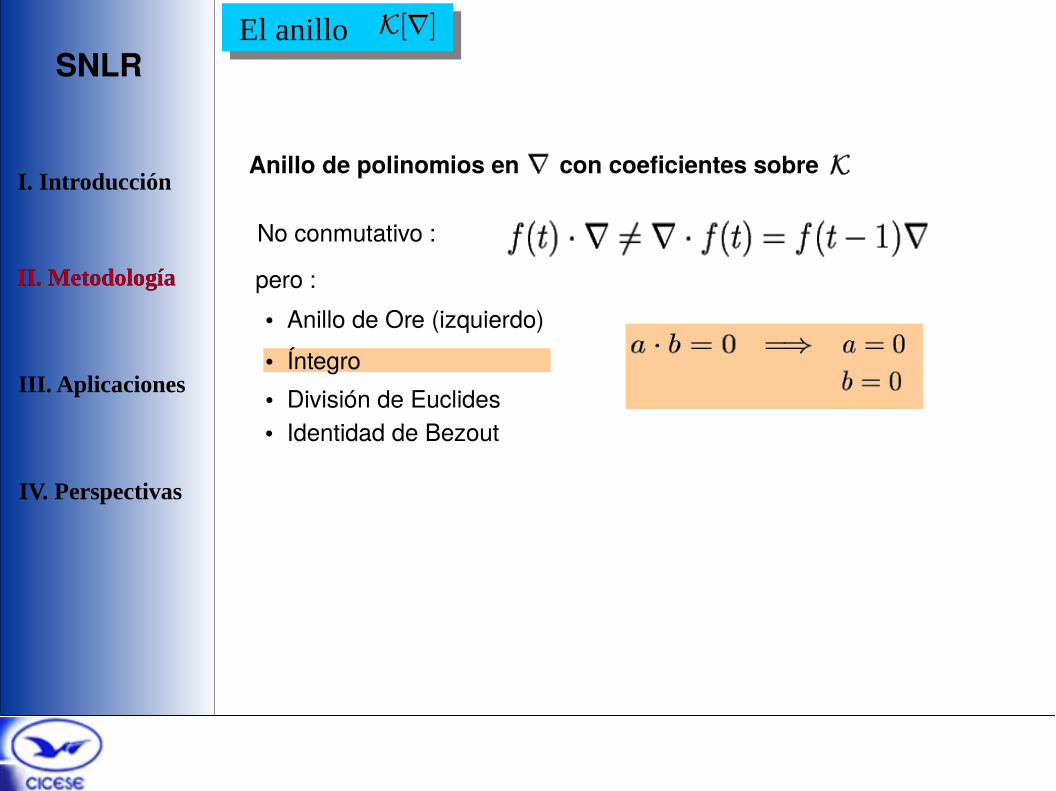
El anillo El anillo
No conmutativo :
• Íntegro • División de Euclides• Identidad de Bezout
• Anillo de Ore (izquierdo)
Anillo de polinomios en con coeficientes sobre
pero :II. Metodología

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
El anillo El anillo
No conmutativo :
• Íntegro • División de Euclides• Identidad de Bezout
• Anillo de Ore (izquierdo) pero :II. Metodología
Anillo de polinomios en con coeficientes sobre
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
El anillo El anillo
No conmutativo :
• Íntegro • División de Euclides• Identidad de Bezout
• Anillo de Ore (izquierdo) pero :II. Metodología
Anillo de polinomios en con coeficientes sobre

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
El anillo El anillo
No conmutativo :
• Íntegro • División de Euclides• Identidad de Bezout
• Anillo de Ore (izquierdo) pero :II. Metodología
Anillo de polinomios en con coeficientes sobre
con

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
El anillo El anillo
No conmutativo :
• Íntegro • División de Euclides• Identidad de Bezout
• Anillo de Ore (izquierdo) pero :II. Metodología
Anillo de polinomios en con coeficientes sobre

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
El módulo a la izquierda El módulo a la izquierda
II. Metodología

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
estáticos dinámicos
Compensadores causalesCompensadores causales
dinámica con respecto a d/dt
• sin memoria • sin memoria d
inám
ica
con
resp
ecto
a
• con retardos
• bicausales
• general con retardos
• general con retardos
II. Metodología

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Compensadores causales (sistemas con retardos)Compensadores causales (sistemas con retardos)
• Estático con retardos
• Dinámico con retardos
Extensión no lineal del modelo de Roesser
II. Metodología
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Algunas aplicacionesAlgunas aplicaciones
• Rechazo de perturbaciones• Rechazo de perturbaciones
• Síntesis de observadores• Síntesis de observadores
• Accesibilidad• Accesibilidad
III. Aplicaciones
• Inversión de sistemas• Inversión de sistemas
• Equivalencia triangular• Equivalencia triangular
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
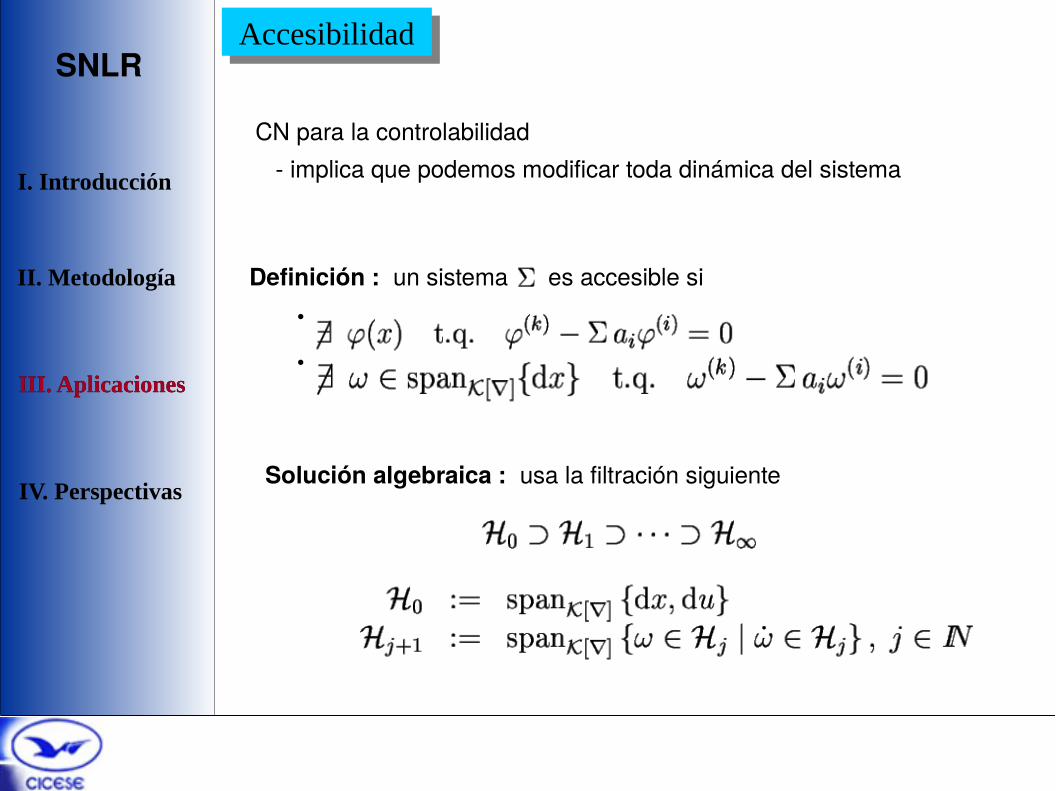
AccesibilidadAccesibilidad
Definición : un sistema es accesible si•
•
CN para la controlabilidad - implica que podemos modificar toda dinámica del sistema
Solución algebraica : usa la filtración siguiente
III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Accesibilidad (cont.)Accesibilidad (cont.)
Contribución : cálculo alterno de los submodulos
A partir de
se demuestra que
TEOREMA : el sistema es accesible si
III. Aplicaciones
rango por líneas

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
CS de accesibilidadCS de accesibilidad
SL : Criterio de Kalman
Este resultado es equivalente a :
SLR : Controlabilidad débil
SNL : Accesibilidad fuerte
SLVT : Criterio de Silvermann - Meadows
III. Aplicaciones
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
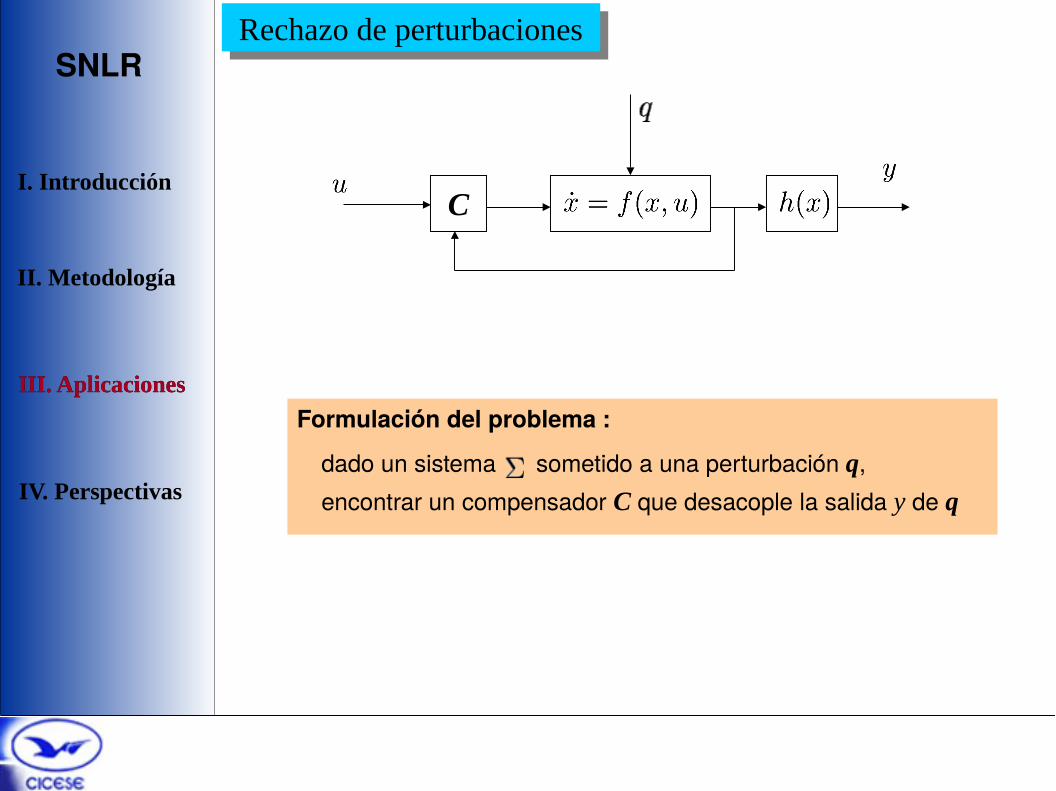
Rechazo de perturbacionesRechazo de perturbaciones
C
Formulación del problema :
dado un sistema sometido a una perturbación q, encontrar un compensador C que desacople la salida y de q
III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Rechazo de perturbacionesRechazo de perturbaciones
Ejemplo introductivo :
Problema : cómo identificar los estados que no « estorban »?
III. Aplicaciones
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
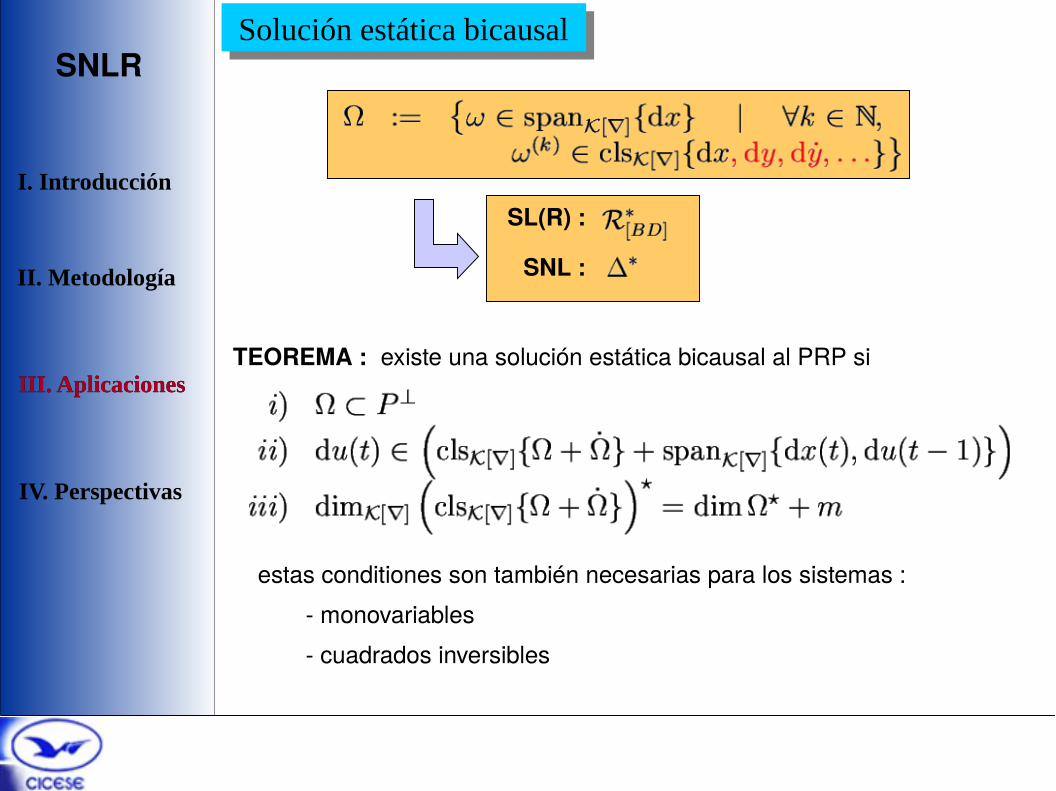
SL(R) :
SNL :
Solución estática bicausalSolución estática bicausal
TEOREMA : existe una solución estática bicausal al PRP si
estas conditiones son también necesarias para los sistemas : - monovariables - cuadrados inversibles
III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Linealización Entrada / Salida (monovariable)Linealización Entrada / Salida (monovariable)
?
.
Objetivo : obtener una transferencia lineal
Sistema no lineal
III. Aplicaciones
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Linealización Entrada / Salida (monovariable)Linealización Entrada / Salida (monovariable)
Soluciones propuestas para este problema :
• Retroalimentación estática de salida- linealización por inyecciones aditivas de entrada/salida
• Retroalimentación de estado (estática y dinámica)
Posibles aplicaciones
• Seguimiento de trayectorias
• Síntesis de observadores( utilizando los resultados disponibles en el caso lineal con retardos )
III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
ObservabilidadObservabilidad
x
t
y
y
t t
t
x
III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Síntesis de observadoresSíntesis de observadores
• Observador con dinámica de error lineal
Si el sistema es linealizable por inyecciones de salida :
observable si III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
Inversión de sistemasInversión de sistemas
yu
tt
Para sistemas sin retardo, solución basada en el algoritmo de estructura (Singh).
Motivación : permite encontrar las entradas que producen una salida deseada
Contribución : extensión al caso de SNLR (IEEE MCCS 98, Kybernetika 2000)
III. Aplicaciones

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
III. Aplicaciones
Equivalencia triangularEquivalencia triangular
Contribución : solución completa (S&C Letters 2007)
Problema. Dado un sistema, encontrar, si es posible,un cambio de coordenadas x tal que el sistema puedaser escrito como
con
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Aplicación tecnológicaAplicación tecnológica
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
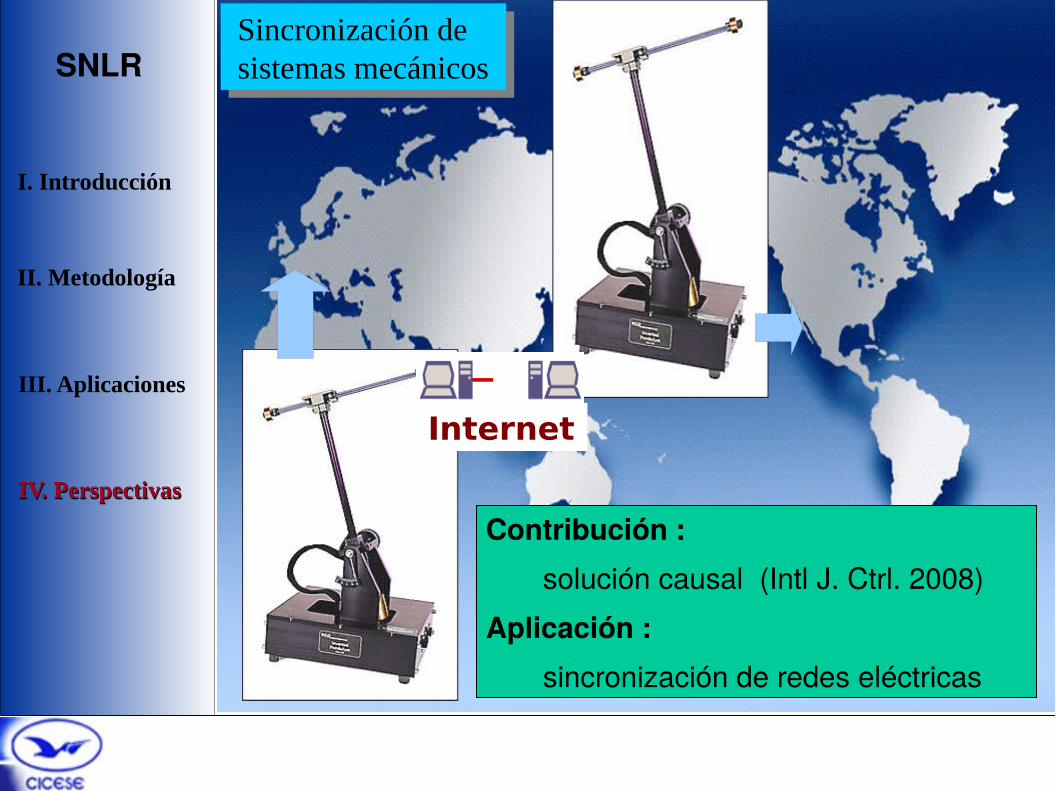
Sincronización de sistemas mecánicos
Sincronización de sistemas mecánicos
Contribución : solución causal (Intl J. Ctrl. 2008)Aplicación : sincronización de redes eléctricas
Internet

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Aplicación tecnológicaAplicación tecnológica

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Aplicación tecnológicaAplicación tecnológica

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Aplicación tecnológicaAplicación tecnológica

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Aplicación tecnológicaAplicación tecnológica

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Desarrollo de enfoque “geométrico” para SNLRDesarrollo de enfoque “geométrico” para SNLR
• Se define una extensión del corchete de Lie para SNLR
• No se tiene una geometría definida• Equiv. con SL vía cambio de coordenadas. ( ACC 2010 )• CNS para integrabilidad (TAC 2011)• Linealización por inyección E/S (Automatica 2013)
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Desarrollo de herramientas computacionalesDesarrollo de herramientas computacionales
SAC: Symbolic Analysis Control [package] ( IFAC 2007 )
• Basado en software libre MAXIMA
• Multiplataforma
• Versión beta disponible
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
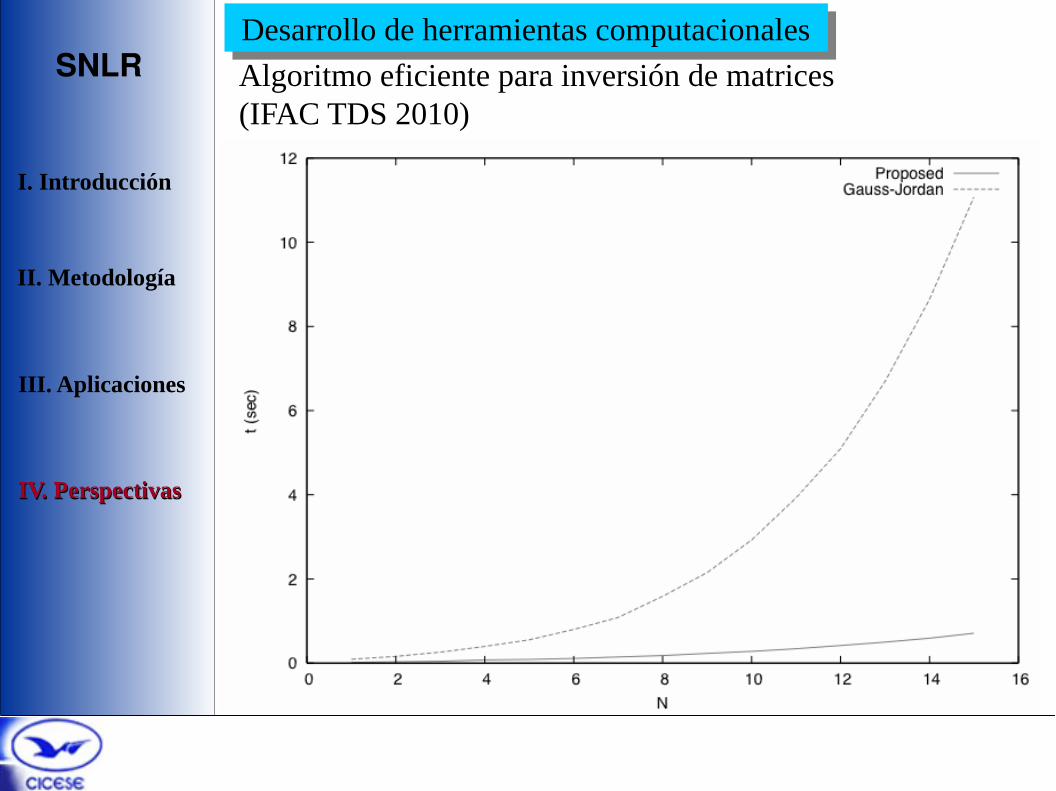
Desarrollo de herramientas computacionalesDesarrollo de herramientas computacionales
Algoritmo eficiente para inversión de matrices(IFAC TDS 2010)

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Desarrollo de un sistema de monitoreo respiratorioDesarrollo de un sistema de monitoreo respiratorio
• EPOC y mortalidad infantil
• Monitoreo permanente de un médico
• deseable• no posible
• Opción: monitoreo electrónico

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Desarrollo de un sistema de monitoreo respiratorioDesarrollo de un sistema de monitoreo respiratorio
Enfoque propuesto: identificación paramétrica

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Desarrollo de un sistema de monitoreo respiratorioDesarrollo de un sistema de monitoreo respiratorio

SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. PerspectivasIV. Perspectivas
Desarrollo de un sistema de monitoreo respiratorioDesarrollo de un sistema de monitoreo respiratorio
Otro enfoque: análisis de componentes independientes
SNLR
I. Introducción
II. Metodología
III. Aplicaciones
IV. Perspectivas
PREGUNTAS