Amplificador Classe D com Elevada Rejeição ao Ruído da ...€¦ · Amplificador Classe D com...
94
Amplificador Classe D com Elevada Rejeição ao Ruído da Alimentação César Belo Gama Flor de Sá Dissertação para obtenção do Grau de Mestre em Engenharia Eletrotécnica e de Computadores Orientador: Prof. Marcelino Bicho dos Santos Júri: Presidente: Prof. Gonçalo Nuno Gomes Tavares Orientador: Prof. Marcelino Bicho dos Santos Vogal: Prof. José João Henriques Teixeira de Sousa Novembro 2018
Transcript of Amplificador Classe D com Elevada Rejeição ao Ruído da ...€¦ · Amplificador Classe D com...
-
Amplificador Classe D com Elevada Rejeição ao Ruído da
Alimentação
César Belo Gama Flor de Sá
Dissertação para obtenção do Grau de Mestre em
Engenharia Eletrotécnica e de Computadores
Orientador: Prof. Marcelino Bicho dos Santos
Júri:
Presidente: Prof. Gonçalo Nuno Gomes Tavares
Orientador: Prof. Marcelino Bicho dos Santos
Vogal: Prof. José João Henriques Teixeira de Sousa
Novembro 2018
-
ii
-
iii
Declaração
Declaro que o presente documento é um trabalho original da minha autoria e que cumpre todos os
requisitos do Código de Conduta e Boas Práticas da Universidade de Lisboa.
-
iv
-
v
Agradecimentos
Gostaria primeiro de agradecer ao meu orientador, Prof. Marcelino Santos, por me ter dado a
oportunidade de trabalhar neste projeto, que me permitiu adquirir imenso conhecimento novo. Para
além disso, agradecer pela sua ajuda, apoio e motivação durante o desenvolvimento do trabalho.
Gostaria também de agradecer à minha família, especificamente à minha mãe e aos meus avós, que
durante toda a minha vida estiveram a meu lado, nos bons e nos maus momentos, e que sempre me
deram uma força tremenda e que me ajudou, e muito, não só nesta etapa académica, mas em todos
os aspetos da minha vida. Sempre que preciso deles, eles estão lá a torcer por mim. Uma palavra extra
à minha mãe, que sem ela e tudo aquilo que fez, e continua a fazer, por mim não conseguiria de todo
alcançar o sucesso que já alcancei. Dedico este trabalho e o meu trajeto académico também ao meu
pai, de quem tenho muitas e boas memórias ao longo da minha infância e adolescência. Outra pessoa
a quem tenho de agradecer é a minha namorada Catarina, que esteve comigo em todo este percurso
e que sei que estará comigo em muitos mais momentos, com todo o seu incondicional apoio, boa
disposição, carinho e muito, muito amor.
Por fim, resta-me agradecer aos meus amigos. Àqueles que me acompanham desde os tempos da
escolaridade obrigatória, com quem espero partilhar todos os momentos que irão definir a minha vida
tal como tem acontecido até agora, amigos esses que já são para a vida. E àqueles que conheci durante
a minha estadia na faculdade, que me ajudaram, e muito, a ultrapassar este desafio e cuja amizade
espero que perdure por bons e longos anos.
-
vi
-
vii
Abstract
The emergence of class D audio amplifiers had a great impact in the audio technology. These
amplifiers are nowadays very common due to its high efficiency when compared to the other topologies
(classes A, B and AB). Because of that, class D amplifiers are widely used in different audio applications.
However, these circuits have some difficulty in reaching high values of Power Supply Rejection Ratio
(PSRR) that audio amplifiers should, and, because of that, the output signal can be highly affected by
the noise. If this problem is solved, while maintaining its high power efficiency, the sound quality obtained
with these circuits increases drastically and, therefore, the other topologies could not compete no longer
with class D.
This work aims to obtain a design of an integrated class D audio amplifier with high PSRR. Based on
an initial circuit, the power transistors were redimensioned, leading to a maximum efficiency of 92.87%,
and various modifications were applied to the PSRR correction circuit (lowpass filters added, increase
of the integrators’ order and gain boosting), improving the distortion conditions, with a maximum PSRR
of 88 dB.
Keywords: audio, class D amplifier, Power Supply Rejection Ratio (PSRR), Total Harmonic
Distortion (THD), efficiency.
-
viii
-
ix
Resumo
O aparecimento dos amplificadores áudio classe D teve um grande impacto na tecnologia áudio.
Estes amplificadores são atualmente bastante utilizados devido ao seu elevado rendimento quando
comparado com as outras topologias (classes A, B e AB). Por este motivo, são muito usados em
diversas aplicações áudio. No entanto, estes circuitos têm dificuldade em alcançar valores elevados de
Power Supply Rejection Ratio (PSRR) que os amplificadores áudio devem alcançar, sendo que, por
isso, o sinal de saída deste amplificador pode ser bastante afetado pelo ruído. Caso este problema seja
resolvido, mantendo o seu alto rendimento, a qualidade do som obtido através destes circuitos aumenta
drasticamente e as outras topologias deixam de conseguir competir com o classe D.
Este trabalho tem como objetivo implementar um amplificador áudio classe D com um PSRR elevado.
Com base num circuito inicial, foram redimensionados os transístores de potência, levando a um
aumento do rendimento energético a um máximo de 92.87%, e foram aplicadas diversas alterações no
circuito de correção do PSRR (filtros passa-baixo adicionados, aumento da ordem dos integradores e
gain boosting), melhorando as condições de distorção, com um PSRR máximo de 88 dB.
Palavras chave: áudio, amplificador classe D, Power Supply Rejection Ratio (PSRR), Total
Harmonic Distortion (THD), rendimento.
-
x
-
xi
Índice
Declaração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iii
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .ix
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiii
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xv
Abreviaturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xvii
1 Introdução 1
1.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2
1.3 Organização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Amplificação áudio 5
2.1 Amplificadores áudio de potência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
2.2 Amplificadores classe D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.1 Andar de saída ou ponte-H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.2 Filtro passa-baixo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
2.3 Modulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
2.3.1 PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.2 Sigma-Delta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
2.3.3 Click Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
2.4 Qualidade sonora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.1 THD e THD+N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
2.4.2 PSRR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
2.4.3 PS-IMD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
2.5 Estado da arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
3 Projeto do Amplificador classe D 25
3.1 Circuito inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
3.1.1 Circuito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
3.1.2 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
3.1.3 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Alterações no esquema elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
3.2.1 Dimensionamento do filtro de saída . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
3.2.2 Dimensionamento dos transístores de potência . . . . . . . . . . . . . . . . . . . . . . . . .34
3.2.3 Novos Gate Drivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
3.2.4 Novo circuito de correção do PSRR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.4.1 Integradores de 2ª ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.4.2 Adição de integrador adicional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
3.2.4.3 Dupla realimentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2.4.4 Filtro na entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42
-
xii
3.2.4.5 Filtro de realimentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
3.2.4.6 Gain boosting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
3.3 Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
3.3.1 Circuito de correção do PSRR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
3.3.2 Comparador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
3.3.3 Amplificador operacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
3.3.4 Gate Drivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
3.3.5 Ponte-H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
4 Resultados 53
4.1 Comportamento no tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
4.2 Rendimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55
4.3 THD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
4.4 PSRR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
5 Conclusões 61
5.1 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Bibliografia 65
A Esquemas elétricos no CADENCE 69
-
xiii
Lista de Figuras
Figura 1.1: Variação do rendimento de um amplificador classe D e AB. . . . . . . . . . . . . . . . . . . . . . . . . .1
Figura 2.1: Esquema elétrico do amplificador classe A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
Figura 2.2: Esquema elétrico do amplificador classe B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
Figura 2.3: Esquema elétrico do amplificador classe AB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
Figura 2.4: Amplificador classe D sem realimentação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
Figura 2.5: Configuração half-bridge do amplificador classe D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Figura 2.6: Configuração full-bridge do amplificador classe D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figura 2.7: Valor na saída para modulação a 3 níveis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figura 2.8: Tempo morto de um half-bridge. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figura 2.9: Filtro passa-baixo de 2ª ordem para half-bridge. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
Figura 2.10: Filtro passa-baixo de 2ª ordem para full-bridge a) normal b) com CE adicional. . . . . . . . . 13
Figura 2.11: Modelo de um modulador NPWM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Figura 2.12: Modulação PWM para uma onda sinusoidal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Figura 2.13: Espetro do sinal PWM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
Figura 2.14: Modulador ΣΔ de 1 bit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
Figura 2.15: Estrutura de um filtro do modulador ΣΔ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
Figura 2.16: Diagramas de blocos de moduladores ΣΔ digitais a) com MSB realimentado b) com
realimentação dos LSBs (verificação do erro). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
Figura 2.17: Diagrama de blocos do modulador click. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
Figura 2.18: Amplificador classe D BTL do tipo I. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
Figura 2.19: Medição tradicional do PSRR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
Figura 3.1: Circuito de correção do PSRR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figura 3.2: Comparador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Figura 3.3: Amplificador operacional. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Figura 3.4: Espelhos de corrente do amplificador operacional. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Figura 3.5: Rede de CMFB do AmpOp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Figura 3.6: Andar de saída e filtro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Figura 3.7: Primeiro estágio dos gate drivers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Figura 3.8: a) Driver PMOS b) Driver NMOS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Figura 3.9: Sinal de saída do amplificador áudio inicial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . .30
Figura 3.10: Tempo morto introduzido pelos gate drivers do Dr. Edgar. . . . . . . . . . . . . . . . . . . . . . . . .31
Figura 3.11: Rendimento inicial em relação à potência de saída. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figura 3.12: THD e THD+N iniciais para diferentes potências de saída. . . . . . . . . . . . . . . . . . . . . . . . .32
Figura 3.13: Variação do PSRR inicial ao longo da gama de frequências audíveis. . . . . . . . . . . . . . . .32
Figura 3.14: Variação das perdas de Joule e de comutação com as dimensões do NMOS. . . . . . . . . 34
Figura 3.15: Testbenches para cálculo das perdas a) de Joule, b) de comutação. . . . . . . . . . . . . . . . .36
Figura 3.16: Cálculo das perdas de comutação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
-
xiv
Figura 3.17: Novos gate drivers do amplificador áudio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Figura 3.18: Portas lógicas a) NOT e b) NOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
Figura 3.19: Novo circuito de correção do PSRR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
Figura 3.20: Amplificador operacional com realimentação geral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
Figura 3.21: Realimentação a) circuito b) introdução do AmpOp e c) introdução da entrada. . . . . . . . .41
Figura 3.22: Filtro RC passa baixo de 1ª ordem. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
Figura 3.23: Montagem inversora. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
Figura 3.24: Layout do amplificador áudio classe D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
Figura 3.25: Layout do circuito de correção do PSRR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Figura 3.26: Distribuição das resistências do 2º integrador (exceto as de realimentação). . . . . . . . . . .47
Figura 3.27: Layout do comparador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
Figura 3.28: Layout do AmpOp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
Figura 3.29: Layout das resistências do AmpOp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
Figura 3.30: Layout dos gate drivers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
Figura 3.31: Layout da ponte-H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Figura 4.1: Sinal de saída do amplificador áudio final. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54
Figura 4.2: Tempo morto introduzido pelos novos gate drivers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55
Figura 4.3: Variação do rendimento com a potência de saída. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
Figura 4.4: Ondulação no sinal de saída a) inicial, b) final. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
Figura 4.5: Sinal de saída para o cálculo do PSRR: a) estabilização, b) ondulação. . . . . . . . . . . . . . .57
Figura 4.6: Variação do PSRR com a frequência. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
Figura 4.7: Variação do PSRR impondo ruído em todo o circuito ou apenas em blocos específicos. . .59
Figura 4.8: Impedância e indutância dos fios. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
Figura 5.1: Diagrama de blocos do amplificador áudio final. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
Figura 5.2: DAC com as resistências escaladas de forma binária. . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
Figura A.1: Amplificador áudio classe D utilizando a biblioteca UMC_18_CMOS para
componentes passivos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Figura A.2: Amplificador áudio classe D usando a biblioteca AnalogLib para componentes passivos. .70
Figura A.3: Circuito de correção do PSRR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
Figura A.4: Amplificador operacional. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Figura A.5: Bloco principal do AmpOp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Figura A.6: Bloco de CMFB e espelhos de corrente do AmpOp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Figura A.7: Gate drivers, ponte-H e pins. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
Figura A.8: Esquema elétrico dos gate drivers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
Figura A.9: Porta NOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
Figura A.10: Porta NOT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
Figura A.11: Comparador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .75
Figura A.12: Circuito de simulação do amplificador áudio classe D. . . . . . . . . . . . . . . . . . . . . . . . . . . .76
-
xv
Lista de Tabelas
Tabela 2.1: Sumário dos projetos mais relevantes relacionados com o tema desta tese. . . . . . . . . . . .24
Tabela 3.1: Comparação do circuito inicial com outros amplificadores Classe D. . . . . . . . . . . . . . . . . .33
Tabela 3.2: Dimensões dos transístores das portas NOT dos gate drivers. . . . . . . . . . . . . . . . . . . . . .38
Tabela 5.1: Caracterização temporal dos drivers e resistência ON dos MOSFETs de potência. . . . . .62
Tabela 5.2: Comparação com outros amplificadores Classe D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
-
xvi
-
xvii
Abreviaturas
ΣΔ Sigma-Delta
ADC Analog-to-Digtal Converter (conversor analógico-digital)
AEM Analytic Exponential Modulator (modulador exponencial analítico)
AmpOp Amplificador Operacional
BTL Bridge-Tied Load
CMOS Complementary Metal Oxide Semiconductor
DAC Digital-to-Analog Converter (conversor digital-analógico)
dB Decibel
DRC Design Rule Check
EMI Interferência Eletromagnética (Eletromagnetic Interference)
FFT Fast Fourier Transform (Transformada rápida de Fourier)
IC Integrated Circuit (circuito integrado)
IMD Intermodulation Distortion
LPF Lowpass Filter (Filtro Passa-Baixo)
LSB Least Significant Bit (bit menos significativo)
LVS Layout versus Schematic check
MF Margem de Fase
MOSFET Metal-Oxide Semiconductor Field-Effect Transistor
MSB Most Significant Bit (bit mais significativo)
NMOS Negative Channel Metal Oxide Semiconductor
PCB Printed Circuit Board
PS-IMD Power Supply Intermodulation Distortion
PMOS Positive Channel Metal Oxide Semiconductor
PSR Power Supply Rejection
PSRR Power Supply Rejection Ratio
PSS Pseudo Steady State
PWM Pulse Width Modulation
RMS Root Mean Square (valor eficaz)
S&H Sample & Hold
SNR Signal-to-Noise Ratio
TBJ Transístor Bipolar de Junções
THD Total Harmonic Distortion
THD+N Total Harmonic Distortion plus Noise
-
xviii
-
1
1 Introdução
1.1 Motivação
Com o avanço tecnológico cada vez mais rápido e sustentado, a exigência relativamente à qualidade
dos produtos desenvolvidos é cada vez maior. O mesmo aplica-se também aos amplificadores áudio.
Já existem há bastantes décadas amplificadores áudio com boa fidelidade, como são os casos dos
amplificadores classe A, B e AB. Contudo, estes apresentam um grande problema, que é o seu
rendimento energético. Enquanto que um amplificador classe A tem um rendimento de
aproximadamente 20%, quer a topologia classe B quer a topologia classe AB possuem um rendimento
prático a rondar os 50% [1]. Tais valores são bastante baixos quando se quer obter um circuito com
limitados gastos energéticos.
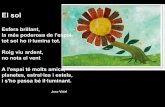
Foi devido a este resultado bastante negativo destas topologias que apareceram os amplificadores
áudio classe D. Esta topologia possui um rendimento energético teórico de 100%, no entanto o seu
rendimento prático ronda os 90% [2], sendo ainda assim um valor bem melhor do que é obtido nos
outros tipos de amplificadores áudio referidos. Para melhor perceber a diferença existente, a Figura 1.1
ilustra a variação do rendimento energético relativamente à potência de saída do amplificador
normalizada à potência máxima de um amplificador classe D e um amplificador classe AB típicos.
Figura 1.1: Variação do rendimento de um amplificador classe D e AB.
0
20
40
60
80
100
0 20 40 60 80 100
Re
nd
ime
nto
[%
]
Potência saída/Potencia máxima [%]
Classe D Classe AB
-
2
Esta melhoria bastante considerável resulta em diversas vantagens como o menor aquecimento por
parte do circuito, menores custos, menor área e, principalmente, menor potência dissipada [3]. Existem,
no entanto, certos inconvenientes ligados aos amplificadores classe D, como a sua não-linearidade e
o ruído que este permite que chegue à saída. Enquanto que o problema da não-linearidade pode ser
relativamente fácil de resolver, através da colocação de realimentação negativa no circuito [4, 5], o
problema do ruído apresenta-se como um desafio com um grau de dificuldade bastante superior.
Conseguindo elimina-lo, ou pelo menos reduzir consideravelmente este ruído obtido à saída do
amplificador, mantendo os níveis altos de rendimento energético obtidos atualmente, a qualidade do
som obtido após a amplificação feita pela topologia classe D aumenta drasticamente.
Os amplificadores áudio classe D são utilizados em bastantes produtos eletrónicos, como sistemas
stereo portáteis, leitores de DVD, TV-LCD, MP4, tablets ou smartphones [3]. A inclusão de um
amplificador com maior qualidade tem um impacto significativo na qualidade dos produtos, resultando
finalmente num grau de satisfação maior por parte dos utilizadores destes dispositivos.
1.2 Objetivos
O objetivo desta tese de mestrado é o de implementar um amplificador áudio classe D com um valor
de PSRR elevado, ou seja, cujo ruído presente na saída do amplificador seja bastante reduzido mesmo
na presença de ruído na alimentação. Existe um circuito inicial que é tomado como ponto de partida
relativamente ao valor de PSRR desejado, pelo que no final deste projeto é suposto obter-se valores
de PSRR superiores aos que são obtidos neste amplificador, sem prejudicar os valores obtidos nos
outros parâmetros. Existe a liberdade de desenhar um amplificador totalmente novo, descartando
aquele que já existe, ou pegar neste e avançar a partir daí para um novo circuito cuja influência do
ruído na sua saída seja inferior à atual.
1.3 Organização
Este relatório desta tese de Mestrado é formado por 5 capítulos, sendo cada capítulo constituído
pelo seguinte conteúdo:
• Capítulo 1 - Introdução: introdução, onde é feita uma apresentação do projeto, a motivação para a sua realização e o seu objetivo.
• Capítulo 2 - Amplificação áudio: revisão do estado da arte, apresentando resumidamente as outras topologias de amplificadores áudio, e dando um grande ênfase na topologia classe D,
que é o tipo de amplificador que se está a estudar neste projeto, existindo também uma
apresentação de alguns tipos de modulação usados neste tipo de circuito e no final os fatores
ou parâmetros mais importantes e a ter em conta quando se quer obter uma onda sonora
amplificada de boa qualidade (THD/THD+N, PSRR e PS-IMD).
-
3
• Capítulo 3 – Projeto do Amplificador classe D: apresentação de todo o processo de implementação do circuito pretendido, desde o circuito inicial desenhado pelo Doutor Edgar
Albuquerque (circuito e resultados por si alcançados) até ao esquema elétrico e layout do
amplificador áudio final obtido, passando por uma descrição de todas as alterações e técnicas
utilizadas, quer no esquema elétrico, quer também no layout, para implementar o amplificador
classe D.
• Capítulo 4 - Resultados: são apresentados os resultados obtidos nas simulações do circuito desenhado, quer o sinal de saída ao longo do tempo, que permite verificar o correto
funcionamento do amplificador áudio, quer os parâmetros que o caracterizam, como são o
rendimento, o THD e o PSRR. • Capítulo 5 - Conclusões: são apresentadas as conclusões do trabalho realizado e dos
resultados obtidos. São sumarizadas as mudanças feitas ao circuito inicial e é analisado o
impacto dessas mudanças nos resultados alcançados. Finalmente, é ainda feita a descrição
de um possível trabalho a desenvolver no futuro para melhorar o circuito obtido.
-
4
-
5
2 Amplificação áudio
Devido aos rápidos avanços tecnológicos do último século, várias topologias diferentes de
amplificadores áudio foram desenvolvidas, cada uma com as suas características únicas. Neste
capítulo é apresentada a revisão do estado da arte. Inicialmente é feita uma breve descrição dos
amplificadores áudio de potência, apresentando a sua utilidade e são explicadas as principais
topologias (A, B e AB). De seguida, é apresentado com maior detalhe o amplificador classe D, quer no
seu todo quer os blocos constituintes deste circuito: andar de saída, filtro passa baixo e modulador,
sendo que, para este último, são apresentadas algumas técnicas de modulação usadas para este bloco.
Por fim, são apresentados os parâmetros mais importantes para se implementar um amplificador que
realize uma amplificação com boa qualidade sonora.
2.1 Amplificadores áudio de potência
O objetivo dos amplificadores áudio de potência é o de processar sinais elétricos que contêm a
informação áudio recebidos na entrada e enviando o sinal processado para um altifalante (elemento
que produz som), sendo este tipo de circuitos energeticamente eficaz e apresentando uma baixa
distorção [6]. Uma vez que as frequências audíveis pelo ser humano se encontram entre os 20 Hz e os
20 kHz, estes circuitos necessitam de ter uma boa resposta nesta gama de frequências. Os transístores
usados na implementação de amplificadores áudio funcionam no modo linear quando se encontram a
conduzir (no caso dos MOSFETs quando conduzem funcionam no tríodo) com o objetivo de se ter uma
tensão de saída proporcional à tensão de entrada [6].
Existem várias topologias de amplificadores áudio. Como forma de comparação com o amplificador
que será implementado, são apresentados de seguida as principais topologias deste tipo de circuito [1,
2, 6].
A primeira topologia apresentada é a do amplificador classe A. Comparativamente com os outros
tipos de amplificadores, este é dos mais simples e um possível esquema elétrico (existem outras
configurações possíveis [7]) pode ser observado na Figura 2.1.
-
6
Figura 2.1: Esquema elétrico do amplificador classe A.
O dispositivo de saída, neste caso um NMOS (podia ser um transístor bipolar de junções, ou TBJ,
por exemplo), na Figura 2.1, conduz durante todo o ciclo da onda de entrada, ou seja, existe sempre
corrente a fluir através deste. É possível obter som com uma qualidade bastante elevada, uma vez que
esta topologia apresenta os menores níveis de distorção e um comportamento bastante linear. No
entanto, devido ao facto de o dispositivo de saída estar constantemente a conduzir, a potência
dissipada deste circuito é demasiado elevada, levando a um rendimento energético muito baixo, a
rondar os 20% quando a amplitude de saída é máxima. Para complementar, têm-se correntes de
polarização bastante elevadas, o que leva a grandes perdas na forma de calor.
Outra das topologias de andares de saída de amplificadores áudio é o andar classe B, que pode ser
analisado na Figura 2.2. Ao contrário dos amplificadores classe A, os dispositivos de saída destes
circuitos conduzem durante meio ciclo, sendo que um dos dispositivos conduz nas alternâncias
positivas do ciclo e o outro dispositivo nas alternâncias negativas. Consequentemente, a potência
dissipada nesta topologia é bastante menor, verificando-se um maior rendimento, com um máximo
teórico de 78.5% e valores práticos a rondar os 50%. Esta diferença entre rendimento teórico e prático
deve-se a, no cálculo do rendimento máximo teórico, ser assumido que os transístores são ideais, algo
que nunca se verifica na prática, existindo por exemplo algumas perdas de comutação (energia que é
dissipada quando os circuitos de condução mudam de tarefa, ou seja, um passa a conduzir e o que
conduzia passa a estar no corte). Para além deste facto, o rendimento teórico é obtido para a condição
de a amplitude do sinal de saída ser máxima (igual à tensão de alimentação). Como os transístores
não conseguem ter uma tensão entre o dreno (D) e a fonte (S) nula, o rendimento será sempre menor.
Em acréscimo tem-se que, para amplitudes menores, o rendimento também decresce. Este circuito
possui, no entanto, a desvantagem de não reproduzir o sinal áudio recebido com uma qualidade tão
boa quanto a topologia classe A. Isto deve-se ao facto de existir um tempo de ligar e desligar dos
dispositivos de saída, levando a que ocorram alguns problemas de linearidade no ponto de cruzamento
(do inglês crossover, em que o transístor que anteriormente não se encontrava a conduzir passa a fazê-
-
7
lo e o que conduzia passa a estar ao corte) e, consequentemente, se obtenha à saída o sinal de entrada
amplificado, mas com alguma distorção. A existência desta distorção no sinal de saída, que na teoria
não é considerada, também leva à diferença apresentada entre os rendimentos teórico e prático desta
topologia de amplificadores áudio.
Figura 2.2: Esquema elétrico do amplificador classe B.
Por último tem-se a topologia classe AB. Esta topologia combina as melhores características dos
amplificadores áudio classe A e classe B, sendo por isso atualmente dos amplificadores áudio mais
comuns. O esquema desta topologia pode ser observado na Figura 2.3.
Figura 2.3: Esquema elétrico do amplificador classe AB.
-
8
Cada dispositivo de saída conduz durante mais de meio ciclo, mas menos que o ciclo inteiro,
permitindo a que haja um curto espaço de tempo em que ambos conduzem simultaneamente (perto do
ponto de crossover). Com esta medida os problemas de não-linearidade que existem na topologia
classe B são atenuados. Para além disso, previne a obtenção de valores de rendimento energético
baixos como na topologia classe A. Juntando a esta técnica uma baixa corrente de polarização, é
possível obter um rendimento próximo do obtido pelos amplificadores áudio classe B.
2.2 Amplificador classe D
Os amplificadores áudio classe D apresentam uma potência dissipada muito menor do que as outras
topologias apresentadas anteriormente. Tal deve-se ao facto de o andar de saída deste circuito possuir
transístores que têm um comportamento semelhante a um interruptor [9], funcionando ou no tríodo ou
no corte. Desta forma, tem-se idealmente uma corrente de dreno nula quando o transístor está
desligado (OFF) e uma tensão VDS bastante reduzida quando este se encontra ligado (ON) [6].
Consequentemente, tem-se a topologia de amplificador áudio com o maior rendimento energético,
obtendo um valor teórico de 100%, e na prática valores entre os 90% e os 95% [1]. Foi devido a este
rendimento bastante elevado que estes amplificadores se tornaram bastante comuns.
Um amplificador classe D é tipicamente constituído por 3 blocos: um modulador, um andar de saída
e um filtro LC passa-baixo. É colocado um modulador na entrada de forma a criar o sinal de impulsos
que é então enviado para o andar de saída. Antes de se enviar o sinal amplificado para o altifalante, é
colocado um filtro passa-baixo de forma a minimizar as interferências eletromagnéticas (Eletromagnetic
Interferences, EMI), bem como para remover as altas frequências inseridas aquando da modulação [8],
de forma a, na saída, apenas se ter o sinal de entrada amplificado (cuja frequência se encontra na
gama audível pelo ser humano). O filtro é dimensionado de forma a obter-se o mínimo de perdas
possível, ou seja, com o objetivo de se ter o mínimo de potência dissipada pelo circuito. De forma a
melhor se visualizar esta estrutura, é apresentado na Figura 2.4 um diagrama de blocos de um
amplificador classe D sem realimentação.
Figura 2.4: Amplificador classe D sem realimentação.
O amplificador classe D pode ter uma implementação quer analógica quer digital [5]. Nas
implementações analógicas, tem-se um sinal de entrada analógico e um sistema totalmente analógico,
podendo existir realimentação, sendo até recomendada a sua existência. Esta é inserida de forma a
melhorar o desempenho, uma vez que a existência de realimentação compensa as variações de tensão
que possam existir na fonte de tensão contínua, garantindo uma menor distorção do que numa situação
sem realimentação. Quando estes amplificadores áudio são realizados digitalmente, o seu sistema de
controlo é totalmente digital, não possuindo geralmente erros de controlo, verificando-se apenas a sua
-
9
existência quando a sua implementação é equivalente a um classe D analógico com a inclusão de um
conversor digital-analógico, DAC [11].
De seguida são apresentados com maior detalhe dois blocos de grande importância no amplificador
classe D: o andar de saída e o filtro LC passa-baixo.
2.2.1 Andar de saída ou ponte-H
O andar de saída de um amplificador áudio classe D é constituído por MOSFETs que têm um
comportamento semelhante a um interruptor, como já foi referido. Existem duas topologias possíveis
para este andar: half-bridge e full-bridge. A Figura 2.5 apresenta a topologia half-bridge.
Figura 2.5: Configuração half-bridge do amplificador classe D.
Esta configuração em half-bridge é a mais simples, sendo constituída apenas por dois MOSFETs (o
PMOS T1 e o NMOS T2 da Figura 2.5), sendo por isso necessárias duas fontes de alimentação. Quando
se tem T1 ligado e T2 desligado, a tensão positiva é enviada para o filtro. Na situação oposta, com T1
desligado e T2 ligado, é a tensão negativa que fica ligada à carga [12]. Nesta topologia, apenas existem
estes dois tipos de funcionamento apresentados. Uma vez que as fontes de alimentação podem receber
do amplificador alguma energia (que foi acumulada previamente na bobina do filtro passa-baixo, por
exemplo quando se tinha T1 ligado e agora está ligado T2, estando a fonte de alimentação inferior a
receber essa energia acumulada), verificam-se variações da tensão contínua quando é enviado para a
saída um sinal áudio com baixa frequência [1], algo que influencia negativamente a qualidade sonora
fornecida pelo amplificador (aumenta a distorção).
A configuração full-brige consiste em dois half-bridge e pode ser observada na Figura 2.6, em
conjunto com o filtro passa-baixo. A resistência Rcarga representa a resistência interna do altifalante, tal
como RL da Figura 2.5. Este tipo de configuração também pode ser designado por Bridge-Tied Load
-
10
(BTL) ou por ponte-H (em inglês H-bridge) devido ao facto da colocação dos transístores de potência
no espaço se parecer com a letra H, como se verifica na Figura 2.6.
Figura 2.6: Configuração full-bridge do amplificador classe D.
Nesta topologia, existem o dobro dos componentes, o que pode ser visto como uma desvantagem
comparativamente à configuração half-bridge. No entanto, não existe a necessidade de ter alimentação
simétrica, bastando apenas a existência de uma alimentação única. A configuração full-bridge
apresenta também a possibilidade de se ter três níveis de modulação. Para além dos dois níveis
comuns, em que se tem o transístor ligado à tensão Vdd de um dos half-bridge ligado e o transístor
associado a ground do outro half-bridge também ligado, estando os restantes desligados, podendo
obter-se quer uma tensão positiva na carga quer uma tensão negativa (dependendo de qual o half-
bridge que está ligado à fonte de tensão contínua Vdd), existe um terceiro modo em que é enviada
tensão nula para a carga. Para tal ocorrer, é necessário que ambos os transístores a funcionar no tríodo
estejam ligados ou à fonte de tensão contínua ou à massa [14]. A Figura 2.7 exemplifica este modo,
apresentando todas as 3 situações possíveis (tensão na saída positiva, negativa ou nula), sendo que
as situações 1 e 2 correspondem ao estado de tensão nula na saída do amplificador. A modulação a 3
níveis tem como vantagem o facto de impedir que a energia do filtro seja fornecida parcialmente de
volta à alimentação, algo que não se consegue alcançar na topologia half-bridge.
A topologia de andar de saída full-bridge pode ser implementada de duas maneiras diferentes, que
se prendem com o tipo de transístores MOSFET que a constituem [38]. Uma das formas é tendo-se 4
NMOS idênticos, algo que resulta num produto área x RDS menor que quando é feita uma
implementação PMOS-NMOS (2 PMOS ligados à fonte de alimentação e 2 NMOS ligados à massa, tal
como se apresenta na Figura 2.6). No entanto, a utilização apenas de transístores NMOS leva à
necessidade de acrescentar componentes extra nos drivers de forma a verificarem-se as devidas
transições. Esta necessidade não se verifica no outro tipo de implementação, apresentando-se por isso
como um circuito mais simples e, como tal, mais vantajoso [38].
-
11
Figura 2.7: Valor na saída para modulação a 3 níveis.
O andar de saída do amplificador classe D tem uma grande influência no valor do rendimento
energético, que representa que quantidade de energia fornecida ao circuito é usada eficazmente, ou
seja, com o propósito da amplificação áudio. Este rendimento (η) no andar de saída pode ser definido
matematicamente como [6]:
𝜂 =𝑃𝑠𝑎í𝑑𝑎
𝑃𝑒𝑛𝑡𝑟𝑎𝑑𝑎=
𝑃𝑐𝑎𝑟𝑔𝑎
𝑃𝑐𝑎𝑟𝑔𝑎+𝑃𝑑𝑖𝑠𝑠𝑖𝑝𝑎𝑑𝑎 (2.1)
Uma forma de otimizar este rendimento é através das dimensões dos transístores. Uma vez que a
corrente IDS é alta, é necessário garantir uma tensão VDS baixa, de forma a ter-se a resistência,
RDS = VDS/ IDS, (2.2)
que representa a resistência do transístor quando este se encontra a conduzir (ligado), também ela
baixa. Tal é obtido tendo transístores de saída com grandes dimensões (na ordem dos milímetros), que
leva à redução da potência de Joule. Esta medida tem, no entanto, uma desvantagem, uma vez que
leva ao aumento das perdas resultantes da comutação que ocorre nos transístores da ponte-H e que,
como se verá mais à frente, não é tão linear como se apresenta na teoria (os transístores não ligam e
desligam de forma instantânea e não se observa uma mudança de comportamento dos quatro MOSFET
exatamente ao mesmo tempo). Por isso, é necessário dimensionar os NMOS e PMOS de modo a ter-
se um equilíbrio entre potência de Joule e perdas de comutação. Tal relação, bem como o modo de
alcançar este equilíbrio, será explicada com maior detalhe no próximo capítulo. Isto explica e justifica
também o porquê de, tal como já foi referido, não se ter um rendimento energético igual a 100% que
se tem teoricamente.
Este andar de saída do amplificador classe D, seja qual for a configuração, pode estar protegido de
algumas situações possivelmente prejudiciais, com o objetivo de se ter um amplificador mais duradouro.
Um destes fatores a proteger é o sobreaquecimento. Isto pode ocorrer caso se obtenham valores
perigosos de potência dissipada nos transístores de saída [6]. Uma das formas mais comuns de
resolver este problema é colocando um circuito de controlo de temperatura que, com a ajuda de
sensores, reduz a potência dissipada, com o objetivo de manter a temperatura nos limites aceitáveis
[15]. Caso este não consiga lidar com a temperatura existente, caso esta seja demasiado elevada, são
desligados os canais de saída e só voltam a ser ligados quando se atingir uma temperatura segura
para os transístores.
-
12
Outro fator a ter em conta é o possível fluxo excessivo de corrente nos MOSFETs. Caso existam
ligações erradas, a corrente pode atingir valores exagerados. Para detetar os valores da corrente é
utilizado um comparador [15] que mede a tensão nos transístores, sendo necessário saber-se os
valores das resistências internas destes. Para acertar o valor da corrente, é colocada realimentação
negativa no circuito que limita a corrente de saída de forma a garantir-se um bom funcionamento do
amplificador, sendo que a opção de desligar todo o circuito é tomada como última opção [6].
O tempo de ligação dos transístores também não pode ser desvalorizado. Uma vez que os
transístores não possuem um tempo nulo de mudança de estado (ligado para desligado ou vice-versa),
pode acontecer que, num determinado momento, ambos os transístores do mesmo half-bridge estejam
ligados (curto-circuito entre a tensão de alimentação e a massa). Para evitar este problema, é
introduzido um tempo morto, ou dead time, como é ilustrado na Figura 2.8.
Figura 2.8: Tempo morto de um half-bridge.
É introduzido um atraso na ligação dos transístores [13], de forma a nunca se ter ambos os MOSFETs
ligados, havendo, pelo contrário, um certo momento em que ambos estão desligados, algo que não
danifica o circuito. A única desvantagem é o facto de o tempo morto levar ao aparecimento de alguma
distorção na saída.
2.2.2 Filtro passa-baixo
Como já foi referido anteriormente, o filtro passa-baixo utilizado nos amplificadores áudio classe D é
usado, não só para retirar as frequências inaudíveis ao ser humano do sinal de saída, como para reduzir
a EMI. Não é habitual ter-se um filtro de ordem elevada, de forma a não se ter uma área de circuito
demasiado elevada e, deste modo, reduzir os custos inerentes ao mesmo. O filtro típico usado, quando
se tem um andar de saída half-bridge, é um filtro LC (constituído por bobinas e condensadores) passa-
baixo, com perdas mínimas, de 2ª ordem, como o que é ilustrado na Figura 2.9.
Figura 2.9: Filtro passa-baixo de 2ª ordem para half-bridge.
-
13
Na Figura 2.9 está também presente uma resistência RL, sendo esta a resistência interna do
altifalante. No caso de a configuração do andar de saída ser full-bridge, são utilizados dois filtros passa-
baixo, um para cada half-bridge, tal como é observado na Figura 2.6.
Um filtro passa-baixo de 2ª ordem tem a seguinte função de transferência
𝐻(𝑠) =𝜔𝑛
2
𝑠2+𝜔𝑛
𝑄⁄ 𝑠+𝜔𝑛2 , (2.3)
em que se tem
𝜔𝑛 =1
√𝐿𝐶 e 𝑄 = 𝑅𝐿√
𝐶
𝐿. (2.4, 2.5)
Como se pode observar pela função de transferência (2.3), o ganho do filtro nas baixas frequências
é de 1, ou 0 dB. O filtro é desta forma dimensionado de forma a manter-se o sinal obtido no andar de
saída do amplificador classe D nas frequências audíveis. Outro ponto a ter em conta na hora de
dimensionar este passa baixo é que a frequência de corte do filtro costuma ser um pouco superior à
frequência máxima audível pelo ser humano, 20 kHz, de forma a garantir uma queda de menos de 1dB
para as frequências audíveis. É usual ter-se uma frequência de corte de 40 kHz. Por fim, há que referir
que, como se observa na Equação (2.5), a resistência interna do altifalante tem influência direta no
dimensionamento deste filtro.
O dimensionamento do filtro passa baixo de 2ª ordem presente à saída do amplificador áudio pode
ser feito utilizando uma aproximação de Butterworth. Sabendo que o filtro é de 2ª ordem e que o ganho
inicial é de 0 dB, obtém-se o denominador,
𝐷(𝑆) = 𝑆2 + 1.41421356𝑆 + 1, 𝑆 =𝑠
𝜔𝑛. (2.6)
Desenvolvendo a função de transferência utilizando o denominador de cima, chega-se à conclusão que
se tem o fator de qualidade, 𝑄 = 1 √2⁄ . Utilizando as Equações (2.4) e (2.5) e sabendo o valor do fator
de qualidade, chega-se às equações que definem a bobina e o condensador,
𝐿 =𝑅𝐿√2
𝜔𝑛, (2.7)
𝐶 =1
𝑅𝐿𝜔𝑛√2. (2.8)
Com estas duas equações, apenas é necessário saber o valor da resistência interna do altifalante e
definir a frequência de corte do filtro para se poder dimensionar este passa baixo.
Quando o andar de saída do amplificador classe D é full-bridge, é utilizada uma das duas topologias
apresentadas na Figura 2.10.
Figura 2.10: Filtro passa-baixo de 2ª ordem para full-bridge a) normal b) com CE adicional.
-
14
Na situação apresentada na Figura 2.10a, têm-se dois filtros iguais ao da Figura 2.9, um para cada
half-bridge. Consequentemente, é possível obter as equações da bobina e do condensador a partir
desse filtro, ou seja, a partir das Equações (2.7) e (2.8), considerando que a resistência da carga é
dividida em duas resistências em série e que, consequentemente, se tem Rcarga/2 para cada um dos
filtros, levando às equações
𝐿 =1
2
𝑅𝑙𝑜𝑎𝑑√2
𝜔𝑛, (2.9)
𝐶 =2
𝑅𝑙𝑜𝑎𝑑𝜔𝑛√2. (2.10)
Outra forma de analisar este circuito é considerando-o como um só filtro e obtendo a sua função de
transferência,
𝐻(𝑠) =𝑉𝑜+−𝑉𝑜
−
𝑉𝑖+−𝑉𝑖
+ =1
𝐿𝐶
𝑠2+𝑠2
𝑅𝑐𝑎𝑟𝑔𝑎𝐶+
1
𝐿𝐶
. (2.11)
Combinando as funções de transferência (2.3) e (2.11), obtém-se
𝜔𝑛 =1
√𝐿𝐶 e
𝜔𝑛𝑄=
2
𝑅𝑐𝑎𝑟𝑔𝑎𝐶, (2.12, 2.13)
equações estas que levam ao resultado apresentado nas Equações (2.9) e (2.10).
No caso de se ter um condensador adicional, paralelo ao altifalante, representado na Figura 2.10b
pela sua resistência interna, tem-se uma função de transferência ligeiramente diferente,
𝐻(𝑠) =𝑉𝑜+−𝑉𝑜
−
𝑉𝑖+−𝑉𝑖
+ =
1
𝐿(𝐶+2𝐶𝐸)
𝑠2+𝑠2
𝑅𝑐𝑎𝑟𝑔𝑎(𝐶+2𝐶𝐸)+
1
𝐿(𝐶+2𝐶𝐸)
, (2.14)
que, considerando que se tem 𝑄 = 1 √2⁄ tal como nas duas últimas situações, leva a um filtro definido
por
𝐿 =1
2
𝑅𝑐𝑎𝑟𝑔𝑎√2
𝜔𝑛 , 𝐶 =
1
𝑅𝐿𝜔𝑛√2 e 𝐶𝐸 =
𝐶
2. (2.15, 2.16, 2.17)
Apesar dos benefícios que a presença do filtro traz, existem amplificadores classe D que não
possuem filtro [17], devido à área que ocupam e ao facto de, para amplificadores de baixa potência,
este poder ser tão dispendioso quanto o resto do circuito [6]. Atualmente, existem altifalantes que têm
incorporado um filtro passa baixo e que, desta forma, permitem que não seja colocado um LPF no
circuito, havendo outros que, sendo indutivos, refletem-se no conjunto final como um filtro passa baixo.
2.3 Modulação
Existem diversas formas de implementar moduladores classe D. Todos estes descodificam
informação sobre o sinal áudio de entrada e criam uma onda de impulsos com base nessa mesma
informação. A largura de cada impulso está relacionada com a amplitude do sinal sonoro e o seu
espetro inclui o sinal desejado, bem como conteúdo de alta frequência indesejado. O que varia entre
as técnicas de modulação é a distribuição de energia [6].
Neste estudo serão apresentadas três técnicas diferentes de modulação: Pulse Width Modulation
(PWM), Sigma-Delta (ΣΔ) Modulation e Click Modulation.
-
15
2.3.1 PWM
Esta é a técnica de modulação mais comum nos amplificadores classe D. Existem dois tipos
diferentes de modulação PWM: amostrado naturalmente (natural PWM, NPWM) e amostrado
uniformemente (uniform PWM, UPWM). No caso de NPWM, o sinal modulado é criado num modulador
PWM analógico, onde é feita a comparação do sinal áudio de entrada com uma onda triangular ou
dente de serra. Já o tipo UPWM é criado digitalmente através da transformação do sinal de entrada
num sinal de impulsos, pelo chamado Sample & Hold (S&H) [12]. Na Figura 2.11 é possível observar
um possível modulador NPWM analógico.
Figura 2.11: Modelo de um modulador NPWM.
A onda triangular ou dente de serra possui uma frequência fixa e múltipla (tipicamente entre 10 a 20
vezes) da frequência máxima possível da onda de entrada [12], que neste caso é 20 kHz. O resultado
desta comparação consiste numa onda de impulsos com frequência igual à da onda moduladora e cujo
duty-cycle para cada período é proporcional à amplitude do sinal áudio de entrada do modulador [6].
Na Figura 2.12 pode-se observar um exemplo do que é obtido através desta técnica de modulação,
tendo como sinal de entrada uma simples sinusoide (a preto) e uma onda moduladora triangular (a
vermelho), tendo como resultado uma onda quadrada com duty-cycle variante (a azul).
Figura 2.12: Modulação PWM para uma onda sinusoidal.
-
16
Para amplitudes altas e positivas, tem-se um duty-cycle perto dos 100% e para amplitudes altamente
negativas este encontra-se próximo dos 0%. Caso a amplitude do sinal de entrada atinja a amplitude
da onda moduladora, ocorre a chamada modulação total (do inglês full modulation), em que o comboio
de impulsos para, tendo em cada período um duty-cycle de 0% ou 100% [6].
No que diz respeito ao espetro do sinal PWM, este é constituído pela frequência do sinal áudio de
entrada, a frequência moduladora e respetivos múltiplos, e as somas e diferenças das frequências dos
dois sinais e respetivos múltiplos. Tal pode ser observado na Figura 2.13, em que se considera a
frequência do sinal áudio 1 kHz e a frequência moduladora 400 kHz.
Figura 2.13: Espetro do sinal PWM.
Uma vez que alguns dos múltiplos referidos estarão na zona onde se encontra a frequência do sinal
de entrada, é essencial que a frequência da onda moduladora seja muito superior que os 20 kHz (algo
que se verifica na Figura 2.13), de forma a que estes elementos tenham um peso quase inexistente na
gama de frequências audível pelo ser humano [12].
2.3.2 Sigma-Delta
Esta técnica possui um funcionamento com base na sobre amostragem e noise shaping [12]. No
processo de amostragem, caso o teorema de Nyquist seja cumprido (frequência de amostragem
superior a 2 vezes a maior frequência do sinal), o sinal de entrada original pode ser reconstruído sem
aliasing atravessando o sinal amostrado por um filtro passa baixo. Na sobre amostragem, que não é
mais que amostragem com uma frequência de amostragem é significativamente maior ao rácio de
Nyquist, o ruído é espalhado ao longo de uma maior gama de frequências, reduzindo a densidade
espetral do ruído de quantização. O noise shaping altera a forma do espetro do erro introduzido pela
quantização. É possível obter valores elevados na relação sinal-ruído (do inglês Signal-to-Noise Ratio,
SNR), no caso de se implementar um modulador com uma ordem alta. O SNR compara o nível de
um sinal desejado com o nível do ruído nele presente,
𝑆𝑁𝑅 = 10log(𝑃𝑠𝑖𝑛𝑎𝑙
𝑃𝑟𝑢í𝑑𝑜). (2.18)
Quanto mais alta for a relação sinal-ruído, menor é a presença de ruído. Um modulador ΣΔ pode ter
várias implementações, sendo que estas se podem classificar como de 1 bit ou multi bits [19].
-
17
Para a situação do modulador de 1 bit analógico, o diagrama de blocos pode ser observado na Figura
2.14. Este circuito é constituído por um filtro, um conversor analógico-digital (ADC) de 1 bit e um DAC
de 1 bit colocado na realimentação.
Figura 2.14: Modulador ΣΔ de 1 bit.
O ADC do modulador introduz algum ruído, que é mapeado espectralmente de acordo com o filtro
de forma a minimizar o ruído presente na gama de frequências audível, compensando nas altas
frequências. O circuito opera numa entrada de sobre amostragem (com frequência múltipla da
frequência de amostragem, L.fs) que permite aumentar a largura de banda do ruído nas altas
frequências (obtém-se um ruído mais espalhado pelas diferentes frequências) [12].
Comparando com o modulador PWM apresentado na subsecção anterior, observam-se diferenças
vantajosas e prejudiciais relativas ao comportamento do circuito. Esta técnica de modulação apresenta
um sinal de saída com menos distorção que no caso da modulação PWM e menos picos de energia
nas altas frequências [19]. No entanto, um modulador sigma-delta convencional apresenta um limite de
estabilidade bastante baixo e um bit rate bastante alto (entre 1 MHz e 2 MHz). Estes problemas podem
ser aligeirados aumentando o valor do SNR na gama de frequências audíveis [19].
No que diz respeito ao modulador, com maior detalhe no filtro, um exemplo do circuito pode ser
observado na Figura 2.15. Neste caso, tem-se um filtro de 7ª ordem constituído por 7 integradores (ax)
e realimentação para cada par de integradores.
Figura 2.15: Estrutura de um filtro do modulador ΣΔ.
-
18
Tipicamente neste tipo de modulador, o número de amplificadores utilizados iguala a ordem do filtro,
tal como se verifica na Figura 2.15. Contudo, têm sido desenvolvidos moduladores ΣΔ com menos
amplificadores [35] e até sem estes serem utilizados [36]. No caso dos moduladores sem
amplificadores, o ganho encontra-se concentrado no comparador, ao contrário dos outros modelos,
onde o ganho é maioritariamente obtido nos andares ativos.
Caso se queira implementar digitalmente um modulador ΣΔ, pode fazê-lo de duas formas distintas.
Os diagramas de blocos destes dois modos de implementação podem ser observados na Figura 2.16.
Figura 2.16: Diagramas de blocos de moduladores ΣΔ digitais a) com MSB realimentado b) com
realimentação dos LSBs (verificação do erro).
No caso de se implementar o circuito com realimentação do bit mais significativo (Most Significant
Bit, MSB), situação presente na Figura 2.16a, os integradores do filtro são substituídos por
acumuladores e um circuito de truncatura, que captura o MSB enviado para a saída do modulador e
envia-o de volta para a entrada, através de realimentação negativa. Já no segundo caso, apresentado
na Figura 2.16b, o MSB é enviado para a saída do modulador e os bits menos significativos (Least
Significant Bits, LSBs) são enviados para a entrada, passando antes pelo filtro [12]. Ambas as
configurações apresentadas são de 1 bit (apenas é enviado 1 bit para o andar de saída do classe D).
2.3.3 Click Modulation
Esta técnica de modulação foi inventada em 1982 por B. F. Logan Jr. [20] que gera um comboio de
impulsos modulados na sua largura, tal como se tem nas outras técnicas de modulação apresentadas,
e cujo espetro possui uma banda de base separada e livre de distorção, algo único quando comparado
com as outras duas técnicas apresentadas [12] e sendo bastante vantajosa num circuito áudio, que
beneficia com o mínimo de distorção possível. Para além disso, o comboio de impulsos criado não
necessita de sobre amostragem e satisfaz as condições do teorema de amostragem. O diagrama de
blocos deste modulador pode ser observado na Figura 2.17.
Figura 2.17: Diagrama de blocos do modulador click.
-
19
Como é possível observar pela Figura 2.17, o sinal de entrada f(t) é direcionado para 2 caminhos
diferentes. Um deles possui um transformador de Hilbert e o outro apenas introduz um certo atraso (T)
na função de entrada. Isto leva a que, à entrada do modulador exponencial analítico (do inglês Analytic
Exponential Modulator, AEM) esteja um sinal
𝐹(𝑡) = 𝑓(𝑡) + 𝑗. 𝑓(𝑡), (2.19)
em que 𝑓(𝑡) corresponde à transformada de Hilbert do sinal de entrada do modulador. Este sinal
atravessa o AEM, resultando no sinal na sua saída
𝑧(𝑡) = 𝑥(𝑡) + 𝑗. 𝑦(𝑡) = 𝑒−𝑗𝐹(𝑡). (2.20)
Os dois sinais x(t) e y(t) são colocados à entrada de um filtro passa-baixo (do inglês lowpass filter,
LPF, como está representado na Figura 2.17), de forma a eliminar-se o ruído introduzido pelo AEM,
prevenindo desta forma a ocorrência de aliasing. O sinal resultante 𝑥𝑓(𝑡) é multiplicado por um cosseno
e o sinal 𝑦𝑓(𝑡) por um seno [21], ambos na frequência de modulação, fc. São de seguida somados os
dois sinais obtidos anteriormente, tendo-se por isso uma função
𝑤(𝑡) = 𝑥(𝑡). cos(2𝜋𝑓𝑐𝑡) + 𝑦(𝑡). sen(2𝜋𝑓𝑐𝑡). (2.21)
Este sinal w(t) possui toda a informação necessária para reconstruir o sinal de entrada, sem se ter
qualquer aliasing presente. Finalmente, é colocada numa porta XOR os sinais de w(t) e de sen(2𝜋𝑓𝑐𝑡)
de forma a obter-se o sinal de saída do modulador
𝑠(𝑡) = −𝜋
2. [𝑠𝑔𝑛(𝑠(𝑡))]. [𝑠𝑔𝑛(sen(2𝜋𝑓𝑐𝑡))]. (2.22)
Portanto, a modulação click é um tipo de modulação na largura que cria um sinal que apenas possui
um de dois valores possíveis (±π/2). Esta técnica de modulação apresenta algumas vantagens quando
comparada com a mais usual neste tipo de circuitos, a modulação PWM. Uma delas é o facto de a
frequência de modulação ser bastante menor em moduladores click. Este facto leva a que a distorção
introduzida na modulação seja espalhada nas altas frequências [22], fora da gama de frequências
audíveis pelo ser humano, não afetando, por isso, a banda de interesse de um amplificador áudio. Outra
vantagem deste modulador é o facto de conseguir obter um rendimento energético superior ao que é
obtido com as outras técnicas de modulação áudio [23], utilizando para isso componentes e circuitos
com um consumo muito baixo e que, aliado ao facto de a topologia utilizada, classe D, apresentar por
si só valores elevados de rendimento, poder levar a uma situação energética praticamente ideal.
2.4 Qualidade sonora
Tratando-se o circuito em estudo de um amplificador áudio, é expectável que este apresente na sua
saída um sinal com elevada qualidade no que diz respeito ao som reproduzido. Para que tal seja
possível, diversos fatores têm de ser tidos em conta. Um desses pontos é evitar a ocorrência de sons
indesejados (“clicks” e “pops”), que podem ser ouvidos caso, no processo de ligar e desligar o
amplificador, não se tenha atenção ao modulador, ao timing do andar de saída e ao filtro [6]. Outro fator
é o valor do SNR, que deve ser sempre alto, independentemente da potência do amplificador. O tempo
morto criado nos gate drivers e existente no andar de saída introduz um erro temporal que, por sua vez,
-
20
gera alguma distorção indesejada no altifalante. A melhor solução para este problema é encontrar o
menor tempo morto que garanta a impossibilidade de ocorrer um curto circuito na ponte-H, de forma a
minimizar a distorção presente no circuito [31].
Todos os fatores apresentados têm alguma relevância na qualidade do som obtido após a
amplificação do sinal áudio realizada pelo amplificador classe D. No entanto, esta qualidade sonora é
largamente influenciada pela performance do circuito no que diz respeito à distorção, que é identificada
pelo THD, e à sensibilidade ao ruído de alimentação, que pode ser analisada através do PSRR [10]. A
existência de um comportamento não-linear e de ruído levam a uma baixa qualidade do sinal
amplificado, ou, por outras palavras, levam a valores pobres de THD e PSRR. Isto leva a uma
necessidade de analisar estes dois parâmetros com maior detalhe, de forma a alcançar a qualidade
sonora pretendida. É de referir também que existe outro parâmetro que permite analisar com mais
informação a qualidade sonora do amplificador áudio, que é o PS-IMD e que também será explicado
de seguida.
2.4.1 THD e THD+N
Antes de definir Total Harmonic Distortion (THD), é importante referir o que são harmónicas. As
harmónicas não são mais do que formas de onda cuja frequência é múltipla da frequência da onda
fundamental, fo, e que compõem esta onda fundamental [24]. De uma forma geral, a harmónica de
ordem n possui uma frequência f=n.fo. A existência destas componentes harmónicas leva a desvios da
onda em relação à sua sinusoide fundamental, sendo este fenómeno, prejudicial para o circuito áudio
em análise, designado por distorção harmónica.
É desta distorção harmónica que advém o parâmetro THD, que representa a soma de todos os
componentes harmónicos do sinal sobre o seu valor fundamental [24],
𝑇𝐻𝐷 =√𝑉2
2+𝑉32+𝑉4
2+⋯+𝑉𝑛2
𝑉1× 100% (2.23)
Usualmente, apenas têm relevância no valor de THD as primeiras cinco ou seis harmónicas [25].
Este valor é percentual, sendo maior a percentagem quanto maior for a distorção harmónica presente
no sinal áudio amplificado, significando isto que se pretende um valor de THD o mínimo possível.
Uma forte distorção harmónica tem um impacto negativo no circuito elétrico. Caso este problema não
seja resolvido, pode ocorrer o aumento quer da temperatura do amplificador quer das interferências,
culminando na redução do tempo de vida do respetivo circuito e na danificação dos sistemas de
alimentação [24]. Isto enfatiza mais ainda a importância em se ter um valor de THD reduzido.
Semelhante ao THD, o parâmetro Total Harmonic Distortion plus Noise (THD+N) representa a soma
de todos os componentes harmónicos, tal como ocorre no THD, sendo acrescentada a componente de
ruído, sobre a componente fundamental [25],
𝑇𝐻𝐷 + 𝑁 =√𝑉2
2+𝑉32+𝑉4
2+⋯+𝑉𝑛2+𝑉𝑟𝑢í𝑑𝑜
2
𝑉1× 100% (2.24)
-
21
Esta componente de ruído está integrada numa largura de banda obrigatoriamente especificada, de
forma a que este parâmetro possa ser interpretado [26].
2.4.2 PSRR
Power Supply Rejection Ratio, ou PSRR, é uma medida que representa a influência que uma
variação na tensão de alimentação tem na tensão de saída de um determinado circuito. Ou seja, caso
se verifique a presença de ruído na fonte de tensão contínua, o valor obtido para o PSRR mostra o
peso que esta mesma variação tem na tensão de saída do circuito. Este parâmetro é expresso em dB,
podendo ser positivo ou negativo, dependendo para isso se este é definido como a variação da tensão
de alimentação sobre a variação da tensão de saída, ou vice-versa [27]. O importante é o seu valor em
módulo. Idealmente, deseja-se obter um PSRR bastante elevado em módulo. Tal significaria que era
necessário que se verificasse uma grande ondulação vinda da alimentação para que a tensão de saída
variasse consideravelmente. Portanto, quanto maior for o valor do PSRR em módulo, menor efeito tem
o ruído vindo da fonte de tensão contínua.
No caso dos amplificadores áudio classe D, uma vez que a tensão de alimentação do andar de saída
está ligada ao filtro passa-baixo através de uma resistência bastante baixa (RDS) e como este filtro
apenas elimina as altas frequências, deixando passar toda a gama de frequências audíveis ao ser
humano (entre 20 Hz e 20 kHz), é difícil alcançar um valor de PSRR agradável. Uma boa solução,
bastante utilizada atualmente, é a colocação de realimentação negativa [17]. Realimentação a partir do
filtro, sem o incluir (realimentado o sinal à saída da ponte-H), melhora substancialmente o PSRR e
atenua os outros mecanismos de distorção. Caso seja bem projetado, é possível obter um PSRR maior
que 60 dB num amplificador áudio classe D em circuito fechado [28]. A estabilidade do circuito tem de
ser garantida, o que complica a sua implementação. Para além disso, é necessário ter-se realimentação
analógica contínua no tempo para adquirir informação sobre os erros temporais (em inglês pulse timing
errors), pelo que o circuito de controlo analógico processa o sinal de realimentação [6]. Como este fator
aumenta os custos do circuito, é por vezes utilizado, em vez da realimentação, um modulador digital e
um ADC, para detetar as variações na alimentação e ajustar o comportamento do modulador para as
compensar. Esta tática melhora de facto o PSRR, não atuando, contudo, na distorção harmónica [29].
Outro fator que influencia bastante o valor do PSRR num amplificador áudio classe D, bem como a
forma como este varia ao longo da gama de frequências audível pelo ser humano, é o seu tipo quando
o seu andar de saída é full-bridge (BTL). A grande diferença entre as duas categorias existentes reside
no tipo de amplificador operacional usado no circuito de realimentação (que costuma apresentar-se
numa montagem integradora). No tipo I tem-se um integrador comum, em que o AmpOp apenas possui
uma saída. No caminho de realimentação é usual ter-se outro amplificador operacional, como se pode
observar na Figura 2.18.
Já os amplificadores classe D BTL do tipo II utilizam amplificadores com duas saídas (uma inversora
e uma não-inversora) nos integradores do circuito, não sendo por isso necessário o circuito no caminho
de realimentação presente na Figura 2.18 (é substituído por apenas uma simples resistência). Na
-
22
subsecção 3.1, onde é apresentado o circuito inicial deste projeto, é possível observar um amplificador
áudio deste tipo.
Figura 2.18: Amplificador classe D BTL do tipo I.
Relativamente ao PSRR, no caso do tipo I, este é bastante influenciado pelo mismatch (diferença
entre os valores teórico e real) existente nas resistências do circuito, sendo que um menor mismatch
leva a valores de PSRR mais elevados. Uma vez que o mismatch é independente da frequência, o
PSRR de um amplificador classe D BTL do tipo I não depende da frequência [32]. Já no que diz respeito
ao tipo II, apesar do mismatch também interferir no PSRR, não tem tanta influência como no tipo I.
Neste, o grande fator é o ganho do circuito, em que um maior ganho leva a valores mais elevados de
PSRR. Neste tipo de amplificadores BTL o PSRR varia ao longo da frequência, reduzindo o seu valor
com o aumento da frequência. Por esta razão, e pelo facto de, como já foi referido, o valor do PSRR
do tipo I não ser influenciado pela frequência, tem-se que o tipo I é mais vantajoso nas altas frequências
e o tipo II é mais vantajoso nas baixas frequências.
O método tradicional para medir o valor do PSRR envolve a existência de uma tensão de alimentação
que consiste numa tensão DC e um sinal AC, não existindo qualquer entrada áudio, de forma a ter-se
à saída um resultado diretamente proporcional à ondulação introduzida na alimentação pela fonte AC
[30]. Este método pode ser observado na Figura 2.19.
O método tradicional de medição pode, no entanto, fornecer dados falsos relativamente a este
parâmetro caso seja utilizado incorretamente. Caso não seja colocado qualquer sinal à entrada, como
acontece na Figura 2.19, os valores de PSRR obtidos só se aplicarão a esta situação. Uma melhor
-
23
forma de analisar o PSRR é colocando uma simples onda sinusoidal como sinal de entrada do
amplificador áudio [30].
Figura 2.19: Medição tradicional do PSRR.
2.4.3 PS-IMD
A distorção de intermodulação (Intermodulation Distortion, IMD) resulta da interação de mais de um
sinal num circuito não-linear, como é o caso do amplificador áudio classe D, levando à criação de sinais
extra não desejados. Da interação de dois destes sinais resultam componentes nas somas e diferenças
das frequências originais, multiplicadas por números inteiros [39]. Uma variante desta distorção
encontra-se relacionada com a alimentação, sendo por isso designada por distorção de intermodulação
da fonte de alimentação (Power-Supply Intermodulation Distortion, PS-IMD). Este tipo de distorção
verifica-se quando o ruído da alimentação interage com o sinal de entrada do circuito, podendo até ser
bastante superior à componente de saída na frequência do ruído da fonte de alimentação [40]. Tal
como o PSRR num amplificador classe D BTL do tipo II, o PS-IMD varia com o ganho do circuito. No
entanto, este parâmetro é mais benéfico quanto menor for, uma vez que isso significa que a distorção
que insere no circuito é bastante pequena e não afeta muito o sinal de saída do amplificador áudio,
neste caso [41]. Tal como é apresentado em [17], é possível obter o PS-IMD através da transformada
rápida de Fourier (Fast Fourier Transform, FFT). O gráfico da FFT permite ler o valor de PS-IMD para
o ruído, que corresponde à distância entre o nível de ruído (soma de todas as fontes de ruído e sinais
indesejados, sendo este o valor mínimo medido no circuito) e as harmónicas do sinal, e o PS-IMD para
o sinal, que corresponde à distância entre as harmónicas e o sinal (0 dBV).
2.5 Estado da arte
Para finalizar este capítulo, resta apresentar os amplificadores áudio classe D que já foram
projetados e cujos resultados obtidos são importantes e que devem servir de base para aquilo que se
quer obter nesta tese. Na tabela 2.1 é apresentado um sumário destes projetos mais relevantes do
ponto de vista dos valores que foram registados.
-
24
Tabela 2.1: Sumário dos projetos mais relevantes relacionados com o tema desta tese.
Referências [50] [51] [52] [53] [54] [55] [56] [17]
PSRR [dB] 70 72 80 77 96 82 88 101
η [%] 75,5 84 92 89 93 93 85,5 94
SNR [dB] 98,5 96,5 92 94 103 103 92 97
Psaída max [W] 0,7 1,1 1 0,25 3,6 1,8 1,15 0,85
VDD [V] 2,7~5,4 2,7~4,8 3,7~5 2,7 2,5~5,5 2,5~5,5 2,7~4,9 1,2~4
Rcarga [Ω] 8 8 8 8 4 ou 8 4 8 8
IQ [mA] 4,7 1,9 - 0,25 4 1,5 3,02 3,1
Tecnologia 90 nm 65 nm 0,14 μm 0,5 μm 0,25 μm - 0,18 μm 65 nm
Área [mm2]
-
25
3 Projeto do Amplificador classe D
3.1 Circuito inicial
Foi com base nalgumas informações fornecidas no capítulo anterior que o Doutor Edgar
Albuquerque, ex-investigador do Inesc-ID, desenvolveu o amplificador classe D, implementado em
tecnologia UMC180 (dimensões mínimas dos CMOS de 0.18 μm), que será apresentado de seguida.
Primeiro, será apresentado o circuito por ele desenvolvido, evidenciando algumas das técnicas
utilizadas e decisões tomadas em certos componentes. De seguida, são apresentados os resultados
obtidos com esse circuito, não só a sua prestação no tempo como também os valores de rendimento
energético, THD, THD+N e PSRR. Por fim, são retiradas as respetivas conclusões relativas aos
resultados obtidos, destacando o que é positivo e aquilo que tem de ser melhorado.
3.1.1 Circuito
O sinal de entrada do amplificador áudio inicial corresponde a um sinal já modulado (impulsos de
tensão com duty cycle variante). Isto porque o primeiro bloco, que pode ser observado na Figura 3.1,
corresponde a um circuito de correção de PSRR. O modulador não foi desenhado e não faz parte do
circuito inicial. O que o bloco inicial faz é uma correção do sinal modulado de entrada com 2 ou 3 níveis
(Pa e Pb), através da realimentação do sinal à saída da ponte-H (Va e Vb), de forma a também corrigir o
valor do PSRR (tenta subir este valor na zona de frequências audível, entre os 20 Hz e os 20kHz).
O circuito inicial é um circuito ativo, possuindo duas montagens integradoras de 1ª ordem, cada uma
recorrendo a um amplificador operacional. Este é um bloco extremamente importante no que diz
respeito à resposta do amplificador ao ruído, bem como à distorção, sendo que esta implementação
utilizando filas de integradores (neste caso, uma fila com dois integradores) algo bastante usual
atualmente [34]. Os amplificadores diferenciais inseridos no circuito de correção do PSRR são usados
não só como integradores, mas também como somadores dos sinais de entrada e de realimentação. A
-
26
referida correção é feita utilizando dois comparadores, um para a secção não inversora e outra para a
secção inversora deste bloco do amplificador áudio. Relativamente às resistências e condensadores
desta secção do amplificador áudio, tem-se R1 = R2 = R3 = 100 KΩ, C1 = 20 pF e C2 = 10 pF.
Figura 3.1: Circuito de correção do PSRR.
O comparador utilizado no circuito de correção de PSRR encontra-se representado na Figura 3.2,
encontrando-se em Anexo A o esquema desenhado no CADENCE. Este circuito tem como função
comparar os dois sinais de entrada e colocar a saída com o valor HIGH (‘1’ ou VDD), quando a tensão
na entrada positiva é superior à tensão na entrada negativa, ou a LOW (‘0’ ou GND) caso contrário. A
sua estrutura pode ser dividida em diversas partes. Os transístores M45 e M35 constituem o espelho
de corrente que tem como objetivo forçar 50μA no par diferencial (M33 e M37), sendo que se tem 25μA
em cada NMOS, uma vez que estes transístores têm as mesmas dimensões. Os transístores M38 e
M39 espelham a corrente de M34 e M36 para M44 e M43 respetivamente, originando em Vx um dV/dt
proporcional à diferença de correntes no par diferencial. O PMOS M30 e o NMOS M40 formam um
inversor (porta lógica NOT). Por fim, o par M41 e M42 introduz realimentação positiva e serve para
aumentar a velocidade de comparação, sendo uma derivação de latch, sem a presença da báscula
(dois inversores “costas-com-costas”).
Figura 3.2: Comparador.
-
27
O amplificador operacional diferencial utilizado no circuito de correção do PSRR da Figura 3.1 pode
ser observado na Figura 3.3 e o seu esquema elétrico desenvolvido no CADENCE encontra-se no
Anexo A. É verificada simetria neste circuito, uma vez que as partes positiva e negativa do amplificador
são iguais. As entradas diferenciais do AmpOp estão ligadas às portas de dois PMOS (M54 e M55) e
as suas fontes estão ligadas a um PMOS que tem como função fornecer corrente ao par diferencial
(fonte de corrente simples). Outra característica relevante deste circuito é a presença de quatro ligações
RC série, duas para cada saída do amplificador. São utilizadas resistências de 2 KΩ e condensadores
de 1 pF. Os condensadores são colocados entre a porta e o dreno dos transístores de saída de forma
a reduzir o peso do polo dominante, sendo que as resistências são adicionadas com o objetivo de não
se ter zeros à esquerda do eixo imaginário, algo que ocorre caso só se colocasse o condensador e que
teria um efeito prejudicial sobre a estabilidade do circuito.
Figura 3.3: Amplificador operacional.
Para além da estrutura apresentada na Figura 3.3, o amplificador operacional desenhado pelo Doutor
Edgar apresenta um conjunto de espelhos de corrente que pode ser analisado na Figura 3.4. É possível
observar que estão presentes ramos para gerar as tensões de polarização baseados em espelhos de
corrente simples e de baixa tensão (os MOSFETs presentes possuem dimensões bastante reduzidas),
e que existem múltiplas combinações, que leva a diferentes correntes e cada ramo.
Figura 3.4: Espelhos de corrente do amplificador operacional.
-
28
Para terminar a análise ao amplificador operacional, referir que os transístores NMOS M86 e M103
correspondem à carga ativa do par diferencial e que, devido ao facto deste amplificador possuir um
ganho elevado, precisar de um mecanismo chamado “Common Mode Feedback” (CMFB). Em
amplificadores com ganho elevado, o funcionamento em modo comum é bastante sensível a
mismatches e às propriedades dos transístores, pelo que estes não conseguem ser estabilizados com
realimentação diferencial (encurtar as entradas e saídas, Figura 9.30b de [33]). É por esta razão que
se torna essencial existir uma rede de CMFB de forma a ir ajustando as correntes de polarização do
amplificador operacional. Este circuito pode ser observado na Figura 3.5.
Figura 3.5: Rede de CMFB do AmpOp.
O amplificador foi desenhado com filtro, sendo este o filtro típico, tal como foi apresentado na
subsecção 2.2.2 e cujo esquema pode ser observado na Figura 2.9. Ambos os filtros de 2ª ordem, bem
como o andar de saída e drivers das portas dos transístores MOSFET, podem ser observados na Figura
3.6. O altifalante encontra-se representado como a sua resistência interna, Rcarga.
Figura 3.6: Andar de saída e filtro.
-
29
Algumas notas relevantes podem ser feitas relativamente ao circuito apresentado na Figura 3.6.
Primeiro, é fácil observar que os sinais de entrada dos gate drivers correspondem aos sinais de saída
do circuito de correção do PSRR (saída de ambos os comparadores). É também possível observar que,
tal como foi concluído aquando da revisão do estado da arte, que se está na presença de transístores
de grandes dimensões (os PMOS possuem uma largura de 16.4 mm e os NMOS 5.84 mm). Todos têm
canais com o mesmo comprimento, 340 nm. Observa-se que o sinal que é enviado para o filtro passa
baixo de saída é realimentado para a entrada do circuito de correção do PSRR (Va e Vb). Por fim, há
que referir que este filtro não se encontra corretamente dimensionado, uma vez que se tem uma bobina
de 5 μH e um condensador de 5 μF para cada half-bridge.
O primeiro estágio dos gate drivers, que se encontram entre a saída do circuito de correção do PSRR
e as portas dos transístores NMOS e PMOS da ponte-H do amplificador áudio desenhado podem ser
observados na Figura 3.7. Uma vez que os MOSFETs presentes no andar de saída possuem
dimensões muito grandes, necessitam de uma corrente elevada para terem um funcionamento de
acordo com o previsto (neste caso, comportarem-se como interruptores), bem como tempos de subida
e descida rápidos, sendo que os driver