aleaciones con memoria
13
8/12/2019 aleaciones con memoria http://slidepdf.com/reader/full/aleaciones-con-memoria 1/13 Journal of Applied Mechanics and Technical Physics, Vol. 54, No. 2, pp. 295–307 , 2013. Original Russian Text c A.A. Rogovoi, O.S. Stolbova. MODELING ELASTIC–INELASTIC PROCESSES IN SHAPE MEMORY ALLOYS AT FINITE DEFORMATIONS UDC 539.3 A. A. Rogovoi and O. S. Stolbova Abstract: An equation of state for a shape memory alloy is derived using a formalized approach to the construction of nite-deformation constitutive equations for complex media. The obtained equations were tested for coupled elastic–inelastic boundary-value problems of deformation of a sample of a shape-memory during forward and reverse martensitic transformations. Keywords: nite strain, shape memory, coupled problem. DOI: 10.1134/S0021894413020156 INTRODUCTION In [1–6], an approach has been proposed to construct models describing the behavior of complex media under nite deformations and structural changes in materials based on the principles of thermodynamics and objectivity. The kinematics of a thermo-elastic–inelastic process is described using the procedure of applying small deformations on nite deformation. A thermo-elastic–inelastic process is treated as an elastic process with a stressed reference conguration, which is taken to be an intermediate elastic conguration similar to the current conguration and obtained from it by small elastic unloading. For a formal description of this similarity, a small positive parameter is introduced into the displacement vector dening the position of points in the current conguration with respect to the intermediate conguration. This allows all kinematic quantities to be represented as a series in a small parameter in which only linear terms are kept. As a result, for any elastic law, it is possible to construct constitutive equations with initial stresses and response functions of the material to small elastic deformations with respect to the intermediate conguration. Passage to the limit as the intermediate conguration tends to the current conguration reduces this constitutive equation to an exact evolution equations with the objective derivative following from this passage to the limit. In this paper, this approach is used to construct correct constitutive equations for nite elastic–inelastic deformations of materials that undergo a martensite-to-austenite phase transformation upon deformation and tem- perature change. These equations are tested on coupled elastic–inelastic boundary-value problems of deformation of thin-walled structures. It is assumed that the uniform ambient temperature changes slowly enough, so that any time, the temperature of the material is also uniform and equal to the ambient temperature. This allows us to avoid considering the process of temperature equalization (heat-conductivity equation is not given). Institute of Mechanics of Continuous Media, Ural Branch, Russian Academy of Sciences, Perm’, 614013 Russia; [email protected]. Translated from PrikladnayaMekhanika i Tekhnicheskaya Fizika, Vol. 54, No. 2, pp. 148– 162, March–April, 2013. Original article submitted June 25, 2012. 0021-8944/13/5402-0295 c 2013 by Pleiades Publishing, Ltd. 295
Transcript of aleaciones con memoria

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 1/13
Journal of Applied Mechanics and Technical Physics, Vol. 54, No. 2, pp. 295–307 , 2013.Original Russian Text c A.A. Rogovoi, O.S. Stolbova.
MODELING ELASTIC–INELASTIC PROCESSES
IN SHAPE MEMORY ALLOYS AT FINITE DEFORMATIONS
UDC 539.3A. A. Rogovoi and O. S. Stolbova
Abstract: An equation of state for a shape memory alloy is derived using a formalized approachto the construction of nite-deformation constitutive equations for complex media. The obtainedequations were tested for coupled elastic–inelastic boundary-value problems of deformation of asample of a shape-memory during forward and reverse martensitic transformations.
Keywords: nite strain, shape memory, coupled problem.
DOI: 10.1134/S0021894413020156
INTRODUCTION
In [1–6], an approach has been proposed to construct models describing the behavior of complex media undernite deformations and structural changes in materials based on the principles of thermodynamics and objectivity.The kinematics of a thermo-elastic–inelastic process is described using the procedure of applying small deformationson nite deformation. A thermo-elastic–inelastic process is treated as an elastic process with a stressed referenceconguration, which is taken to be an intermediate elastic conguration similar to the current conguration andobtained from it by small elastic unloading. For a formal description of this similarity, a small positive parameteris introduced into the displacement vector dening the position of points in the current conguration with respectto the intermediate conguration. This allows all kinematic quantities to be represented as a series in a smallparameter in which only linear terms are kept. As a result, for any elastic law, it is possible to construct constitutiveequations with initial stresses and response functions of the material to small elastic deformations with respect to theintermediate conguration. Passage to the limit as the intermediate conguration tends to the current congurationreduces this constitutive equation to an exact evolution equations with the objective derivative following from thispassage to the limit.
In this paper, this approach is used to construct correct constitutive equations for nite elastic–inelasticdeformations of materials that undergo a martensite-to-austenite phase transformation upon deformation and tem-perature change. These equations are tested on coupled elastic–inelastic boundary-value problems of deformationof thin-walled structures. It is assumed that the uniform ambient temperature changes slowly enough, so that anytime, the temperature of the material is also uniform and equal to the ambient temperature. This allows us toavoid considering the process of temperature equalization (heat-conductivity equation is not given).
Institute of Mechanics of Continuous Media, Ural Branch, Russian Academy of Sciences, Perm’, 614013Russia; [email protected]. Translated from Prikladnaya Mekhanika i Tekhnicheskaya Fizika, Vol. 54, No. 2, pp. 148–162, March–April, 2013. Original article submitted June 25, 2012.
0021-8944/13/5402-0295 c 2013 by Pleiades Publishing, Ltd. 295

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 2/13
1. BASIC RELATIONS
This section presents the general constitutive and kinematic relations specied for shape memory alloys.
1.1. Constitutive Relations
Of the equivalent representations of the constitutive relations for a simple material [1 2] satisfying theprinciple of objectivity [7], we choose the form
T = J − 1F ·g(C E , Θ, q ) ·F t . (1.1)
Here T is the true stress tensor, ˜g(C E , Θ, q ) is the response function of the material (second-rank tensor),C E = F tE ·F E is the Cauchy–Green elastic strain measure, F E is the elastic deformation gradient, F is the to-tal deformation gradient, J = I 3(F ) is the third invariant F (Jacobian dening the relative change in volume), Θ isthe absolute temperature, and q is a scalar parameter of the process [in shape memory alloys (SMAs), this is thetemperature-dependent fraction of the martensitic phase in the bulk of the material]. In representation (1.1), thetensor g, known as the second (symmetric) Piola–Kirchhoff stress tensor depends on the physical and mechanicalproperties of the material, characterizes its response to the pure deformation described by the Cauchy–Green strainmeasure C E , is dened on an elementary area of the undeformed initial conguration, and is expressed in termsof the elastic potential as W (C E , Θ, q ) as g = 2( ∂W (C E , Θ, q )/∂C E ). In this case, only the parameters of the
functional relation W (C E ) depend on the quantities Θ and q . For example, the Murnaghan potential with theparameters a and b is written in simplied form as W = a(Θ, q )[I 1(C E ) −3] + b(Θ, q )[I 2(C E ) −3]. Rearrangementof the right side of (1.1) yields the tensor T in the current conguration. Properties of the medium depend on thestructure of the material and can change during deformation and under the action of other physical elds. Theoriented elementary area is determined only by the kinematics of the process.
In [1, 2], the initial conguration κ 0 , intermediate conguration κ , and current (actual) conguration κ
were introduced, where the congurations κ and κ are close. This closeness is characterized by a small parameter ε,which is conveniently used to formalize not only the smallness of the displacement vector, but also the smallness of theother variables dened in terms of displacements. It has been shown [3] that for the intermediate conguration κ ,relation (1.1) can be written, up to terms linear in ε, as
T = T + εT ,
T = −I 1(e)T + h ·T + T ·h t + θ(T ,Θ ) + q (T ,q ) + LIV · ·eE . (1.2)
Here T is the true stress tensor in the intermediate conguration, h = ( u )t is the gradient of the small totaldisplacement vector, is the Hamiltonian for the intermediate conguration, e = ( h + h t )/ 2, eE are the smalltotal and elastic strain tensors with respect to the intermediate conguration, u is the displacement vector fromthe intermediate conguration to the close current conguration, I 1(e) is the rst invariant e, θ is the temperatureincrement (Θ = Θ + εθ), q is the increment q (q = q + εq ), and ( T ,α ) ≡(∂T/∂α ) ; the quantities with subscriptasterisk correspond to the intermediate conguration; LIV is the fourth-rank tensor which denes the response of the material to small elastic deformations with respect to the intermediate conguration (see [3]):
L IV = 4J − 1 F · F 3
◦∂ 2W (C E , Θ , q )
∂C 2E C E = C E
2F t ·F t , (1.3)
A 3
◦ B IV is the operation of scalar premultiplication of the second-rank tensor A by the third basis vector of thefourth-rank tensor B IV ; B IV 2
A is the operation of scalar postmultiplication of the second-rank tensor A by thesecond basis vector of the fourth-rank tensor B IV . The small elastic strain tensor is represented in terms of thesmall thermal strain tensor eΘ and the small phase strain tensor eP h :
eE = e −eΘ −eP h . (1.4)
296

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 3/13
1.2. Kinematic Relations
According to [3 5], the kinematic tensors are given byF = F E ·F P h ·F Θ ; (1.5)
F E = [g + ε(eE + dE )] ·F E = ( g + εh E ) ·F E ; (1.6)F P h = [g + εF − 1
E
·(eP h + dP h )
·F E ]
·F P h = ( g + εF − 1
E
·hP h
·F E )
·F P h ; (1.7)
F Θ = [g + εF −
1P h ·F −
1E ·(eΘ + dΘ ) ·F E ·F P h ] ·F Θ= ( g + εF − 1
P h ·F − 1E ·hΘ ·F E ·F P h ) ·F Θ . (1.8)
Here F is the total deformation gradient, F P h is the inelastic deformation gradient which depends on phase strain,F Θ is the deformation gradient which depends on the thermal strains, g is the unit tensor, hE , hP h , and hΘ are thesmall elastic, phase, and thermal displacement vector gradient, dE , dP h , and dΘ are the small elastic, phase, andthermal rotation tensors with respect to the intermediate conguration, respectively. It has been shown [4] thatthe deformation gradient F P h and F Θ should correspond to pure deformations without rotations: F P h = U P h andF Θ = U Θ , i.e., in the polar expansions F P h = RP h ·U P h and F Θ = RΘ ·U Θ , the orthogonal tensors R P h and RΘ
should be unit: RP h = RΘ = g.As is known, the strain rate tensor D = ( l + lt )/ 2 (l = F ·F − 1 = ( ˜ v )t , v is the rate of displacement, ˜ is
the Hamiltonian with respect to the current conguration) is related to the Almansi strain tensor E = ( g −A)/ 2(A = F − t
·F − 1 is the Almansi strain measure) by the equation D = E CR , where E CR = ˙E + lt
· E + E
·l is the
Kotter–Rivlin objective derivative. Using these relations, we can shown that the strain rate tensor DE correspondsto the Almansi strain tensor E E = ( g − AE )/ 2, where AE = AE = F
− tE ·F − 1
E . The tensor DP h corresponds to thetensor E P h dened as
E P h = ( g − AP h )/ 2, AP h = F − tE ·AP h ·F − 1
E , AP h = F − tP h ·F − 1
P h . (1.9)Similarly, the tensor DΘ corresponds to the tensor E Θ :
E Θ = ( g − AΘ )/ 2,
AΘ = F − tE ·F − t
P h ·AΘ ·F − 1P h ·F − 1
E , AΘ = F − tΘ ·F − 1
Θ .An example, we consider relations (1.9). The tensor inverse to F P h can be expressed from (1.7) as F − 1
P h =F − 1
P h ·(g −εF − 1E ·hP h ·F E ), which is easy to verify ( F P h ·F − 1
P h = F − 1P h ·F P h = g up to linear terms in ε). Using
this expression and retaining only linear terms in ε in (1.9), we obtain˜
AP h = ˜AP h −εh
tP h ·
˜AP h −ε
˜AP h ·hP h . (1.10)Representing this relation as AP h − AP h ≡ ∆ AP h = −∆ h t
P h · AP h − AP h · ∆ hP h (instead of ε, we haveused the notation ∆—the increment of the corresponding quantity), dividing it by the time of transition from theintermediate conguration to the current conguration ∆ t, and letting the intermediate conguration to the currentconguration, we have
˙AP h = −ltP h · AP h − AP h · lP h . (1.11)
Here we have taken into account that AP h → AP h , ∆ AP h / ∆ t → ˙AP h and ∆ hP h / ∆ t →lP h . Since
E CRP h = ˙E P h + lt
P h · E P h + E P h · lP h ,
substituting the expression for E P h from (1.9) and ˙E P h = −˙AP h / 2 from (1.11) into this equality, we obtain
DP h = E CRP h = ( lP h + lt
P h )/ 2.
Thus, the correspondence stated above is proved. Note that, according to [3, 4], lP h = F E · ˙F P h ·F
− 1P h ·F
− 1E = (
˜v P h )
t.Using relation (1.10), the Almansi phase strain tensor E P h in (1.9), consistent with the strain rate tensor DP h ,
can be represented asE P h = E P h + ε(h t
P h · AP h + AP h ·hP h )/ 2, (1.12)where AP h = F − t
E ·AP h ·F − 1E and AP h = F − t
P h ·F − 1P h . In the case of small strains, the intermediate conguration
coincides with the initial conguration. As a result, AP h = g, the tensor E P h becomes zero, and relation (1.12)takes the well-known form E P h = εeP h = ε(h t
P h + hP h )/ 2.
297

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 4/13
M f
q
M s Af As O
IIIII IV VI
0.5
1.0
0
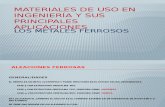
Fig. 1. Volume fraction of the martensite phase versus temperature for the forward and reversetransformations: I–V are the regions of the martensitic and austenitic states in the forward andreverse transformations.
1.3. Shape Memory Alloys
As noted in [8], the thermomechanical behavior of SMAs is characterized by a number of effects and phenom-ena related to the phase and structural changes occurring in these materials: the effect of strain accumulation in theforward (martensitic) transformation, oriented transformation, monotonic, reverse, and reversible shape memory,sharp changes in the elastic moduli and internal friction in phase transitions, and release or absorption of largequantities of latent heat of phase transformations. Different variants of SMA models have been proposed [9–18] (seealso the references therein). These models can be used to describe the above effects and phenomena with varyingdegrees of completeness. In this paper, we use the most complete model proposed in [14–18].
We introduce a scalar internal variable q which as treated as the fraction of the low-temperature (martensite)phase in the volume of the material [for q = 0, the material is entirely in the austenitic state (high-temperaturephase), and for q = 1, it is entirely in the martensitic state]. In order to approximate the phase transition diagram[dependences of the volume fraction of the martensite phase on the temperature and pressure in the forward A →M (austenite–martensite) and reverse M
→ A (martensite–austenite) transformations (Fig. 1)], we use the following
relations [17]:
q = ψ(ξ ), ψ(ξ ) =0, ξ 0,
ψ(ξ ), 0 < ξ < 1, ψ(ξ ) = (1 −cos(πξ )) / 2,1, ξ 1;
(1.13)
ξ = M σs −ΘM s −M f
, M σf Θ M σs (A →M, dq > 0),
ξ = 1 + Aσ
s −ΘAf −As
, Aσs Θ Aσ
f (M →A, dq < 0).(1.14)
Here M s , M f , As , and Af are the temperatures at the start and end of the forward and reverse martensitictransformations in the stress-free material, M σs , M σf , Aσ
s , and Aσf are the temperatures at the start and end of the
forward and reverse martensitic transformations in the loaded material. In the forward transition A → M (seeFig. 1), the material is entirely in the austenitic state in the region III IV V; the region II is transitional: itcontains both the martensite and austenite phases with different volume fractions; in the region I, the material isentirely in the martensitic state. In the reverse transition ( M →A), the material is entirely in the martensitic stateof I II III; region IV is transitional; in region V, the material is entirely in the austenitic state.
We will use linear dependences of the characteristic temperatures on the stress intensity:
M σs = M s + k σi , M σf = M f + k σi ,
298

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 5/13
Aσs = As + k σi , Aσ
f = Af + k σi .(1.15)
Here k is the material constant (for the SMA in the problems considered in Section 2, k = 0.1 K/MPa),σi = (3/ 2) S · ·S is the stress intensity, and S = T − I 1(T )g/ 3 is the deviatoric true stress tensor. Then,representing the expressions for q , ξ , Θ, and σi in the form
q = q + εq , ξ = ξ + εξ , Θ = Θ + εθ, σi = ( σi ) + εσ i , (1.16)
where the prime denotes the increments of the corresponding quantities during the transition from the intermediate
conguration to the current close conguration (the temperature increment is denoted by θ), for 0 < ξ < 1 from(1.13)–(1.15), we have
q = 0 .5(1 −cos(πξ )) , q = 0 .5πξ sin(πξ ),
ξ =
M s + k(σi ) −ΘM s −M f
, A →M, q > 0,
1 + A s + k (σi ) −Θ
Af −As, M →A, q < 0,
ξ = ξ ,Θ θ + ξ ,σ i σi ,(1.17)
ξ ,Θ =
−
1
M s −M f , ξ ,σ i =
k
M s −M f , A
→M, q > 0,
ξ ,Θ = − 1
Af −As, ξ ,σ i =
kAf −As
, M →A, q < 0.
Representing the deviatoric stress tensor as S = S + εS , substituting this expression into the relation for the stressintensity, expanding the resulting relation into a series of ε, and retaining only the linear terms in this parameter,we have
(σi ) = (3/ 2) S · ·S , σi = 3S · ·S
2(σi )=
3S · ·T 2(σi )
, (1.18)
where S = T −I 1(T )g/ 3 and it is taken into account that S · ·S = S · ·[T −I 1(T )g/ 3] = S · ·T [for thedenition of T and T , see (1.2)].
The equations describing the development of phase deformations (excluding the reversible shape memory
effect in the reverse transformations) are given in [15] for small strains. Extending these relations to nite strainsand using the expressions given in the end of Section 1.2, we have
DP h = eP h = ( βg + c0 S + a0 E P h )q, q > 0; (1.19)
DP h = eP h = a0 E (0)
P h
exp( a0q 0 ) −1 + a0 E P h q, q < 0. (1.20)
Here β , c0 , and a0 are material parameters (for SMAs in the problems considered in Section 2, β = 1.17 ·10− 3 ,c0 = 0 .283 ·10− 3 MPa − 1, and a0 = 0.718); E P h is the current phase deformation given by relation (1.12), andq 0 and E (0)
P h are the parameter of the martensite phase and the phase strain at the starting point of the reversetransformation process. Relations (1.19) and (1.20) are correct: rst, they satisfy the principle of objectivity, andsecond, the kinematic tensors DP h and E P h contained in these relations are matched to each other. In terms of small but nite strains, relations (1.19) and (1.20) are represented as
εeP h = ( βg + c0S + a0 E P h )εq , q > 0; (1.21)
εeP h = a0 E (0)
P h
exp(a0 q 0) −1 + a0 E P h εq , q < 0 (1.22)
and dene one of the components in expression (1.4). For another component in expression (1.4)—the smallthermal strain tensor—we use the linear thermal expansion law eΘ = β Θ θg, where β Θ is the coefficient of linearthermal expansion.
299

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 6/13
Relations (1.6)–(1.8) include not only the small elastic, phase, and thermal strain tensors ( eE , eP h , and eΘ ,respectively) but also the small elastic, phase, and thermal rotation tensors ( dE , dP h , and dΘ , respectively) withrespect to the intermediate conguration. According [5], to determine the dP h we use the relation
K ·dP h + dP h ·K = K ·eP h −eP h ·K , K = F ·F tE , (1.23)
which allows dP h to be expressed in terms of eP h . As a result, we have dE = d −dP h since, in accordance with [5]dΘ = 0 if eΘ is dened by the linear thermal expansion law.
The elastic behavior of the material will be described by a simplied Signorini law [19, 20], which is used atmoderate elastic deformations, in particular, in metals. In this law, the second (symmetric) Piola–Kirchhoff stresstensor P II , which has the meaning of the elastic response function of the material ˜ g in (1.1), takes the form
P II ≡g = I 3(C E ) [(k1 + k2)C − 1E −k2 C − 2
E ], (1.24)
where
k1 = Λ(3 −I 1 (C − 1E ))/ 2 + (Λ + G)(3 −I 1(C − 1
E ))2 / 8,
k2 = G −(Λ + G)(3 −I 1(C − 1E ))/ 2,
(1.25)
I 3 is the third principal invariant of the corresponding tensor, Λ and G are material parameters that represent theLame parameter and the linear elastic shear modulus.
In [11, 21], based on the hypothesis of an additive representation of the Gibbs potential, whose terms are
proportional to the volume fractions of the martensite and austenite phases, the dependences of the elastic modulion q (0 q 1) are dened by the relations1
E (q ) =
q E M
+ 1 −q
E A,
1G(q )
= q GM
+ 1 −q
GA,
which imply that
E (q ) = E A
1 + ( γ E −1)q , γ E =
E AE M
,
G(q ) = GA
1 + ( γ G −1)q , γ G =
GA
GM .
Here E M , GM , E A , and GA are the Young’s moduli and the shear moduli for the material in the martensitic andaustenitic states, respectively.
In this paper, we use the following dependence of the elastic moduli on q , which has a continuous derivativewith respect to q :
Z (q ) =Z A , q = 0,
Z A −(Z A −Z M )(1 −cos(πq ))/ 2, 0 < q < 1,Z M , q = 1
(1.26)
(Z = E and Z = G). The hypothesis of the additivity of the potential is not used. In general, Z A for q = 0 andZ M for q = 1 are functions of temperature. Writing the expression for Z as
Z = Z + εZ , (1.27)
where the prime denotes the increment of Z during the transition from the intermediate conguration to the closecurrent conguration, for 0 < q < 1 of (1.26), we obtain
Z = Z A −(Z A −Z M )(1 −cos(πq ))/ 2, Z = ( Z ,q ) q ,
(Z ,q ) = π(Z A −Z M )sin( πq )/ 2.(1.28)
Using the well-known representation of the Lame parameter Λ in terms of E and G and in view of (1.27)and (1.28), we have
Λ = Λ + εΛ , Λ = Λ(q ) = [E (q ) −2G(q )]G(q )
3G(q ) −E (q ) , Λ = (Λ ,q ) q ,
300

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 7/13
(Λ,q ) = [(E ,q ) −2(G,q ) ]G
3G −E + Λ
(G ,q )G
+ Λ[(E ,q ) −3(G,q ) ]G
3G −E .
(1.29)
Taking into account that in the expression for the stress tensor dened in (1.24), the material parame-ters Λ and G depend on temperature and volume fraction of the martensite phase q [see (1.26) and (1.29)], andthat q , in turn, depends on temperature and stress intensity [see (1.13)–(1.15)] and using relation (1.4), we writethe constitutive relation (1.2) for SMAs as
T = T + εT ,
T = −I 1(e)T + h ·T + T ·h t + θ[Y (T, a(q ), Λ, Θ) + Y (T, a(q ), G, Θ)]
+ σi [Y (T, 0, Λ, σi ) + Y (T, 0,G,σ i )] + L IV · ·(e −eP h −eΘ ). (1.30)
Here Y (Φ,a ,x ,y ) = (Φ ,x ) [a(q )(x ,Θ ) + ( x ,q ) (q ,y ) ] is the tensor function of the tensor argument Φ (second-ranktensor) and the scalar arguments a(q ), x, and y, where the rst term in brackets takes into account the temperaturedependence of x at the constant parameter q [q = 0 or q = 1 in (1.26)]: a(q ) = 1 for q = 0 or q = 1 anda(q ) = 0 at 0 < q < 1, and the second term takes into account the dependence of x on q for 0 < q < 1. In viewof relations (1.3), (1.24), and (1.25), the convolution LIV · ·eE can be represented as
LIV
· ·eE = [( k1 ) + ( k2 ) ][(C 1 · ·eE )C 1 −2C 1 ·eE ·C 1 ]
−(k2 ) [(C 2 · ·eE )C 1 + ( C 1 · ·eE )C 2 −2C 1 ·eE ·C 2 −2C 2 ·eE ·C 1]
+ (Λ + G )(C 2 · ·eE )C 2 , (1.31)
where C 1 = F ·C − 1E ·F t and C 2 = F ·C − 2
E ·F t .In relation (1.30), the stress increment T depends on the quantity σi , which, according to (1.18), depends
on T . This dependence can be taken into account in (1.18) by substituting the expression for T from (1.30), whichincludes the quantity σi , dependent on the convolution S · ·T . As a result, we get an equation for this convolution.Then, the penultimate term in the expression for T in (1.30) takes the form
σi A (T ) = 3A (T )
2(σi ) −3 S · ·A (T ) S · ·[−3S I 1 (e) + h ·T + T ·h t
+ θB (T ) + L IV · ·(e −eP h −eΘ )], (1.32)
where A (T ) = Y (T, 0, Λ, σi ) + Y (T, 0,G,σ i ) and B (T ) = Y (T, a(q ), Λ, Θ) + Y (T, a(q ), G, Θ).We obtain recurrence expressions of the form of (1.30) for the derivatives T ,Λ and T ,G contained in the tensor
function Y in (1.30). Note that ˜g,Λ = g for Λ = 1 and G = 0 and g,G = g for Λ = 0 and G = 1. Therefore,in (1.30), we have Y (Φ, a(q ),x ,y ) = 0. Then,
T ,Λ = [1 −εI 1(e)](T ,Λ) + εh ·(T ,Λ) + ε(T ,Λ) ·h t + ε(LIV,Λ ) · ·(e −eP h −eΘ ),
(LIV,Λ ) = L
IVΛ=1 , G =0 ;
(1.33)
T ,G = [1 −εI 1(e)](T ,G ) + εh ·(T ,G ) + ε(T ,G ) ·h t + ε(L IV,G ) · ·(e −eP h −eΘ ),
(L IV,G ) = LIV
Λ=0 , G =1.
(1.34)
301

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 8/13

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 9/13
Mechanical and thermal properties of materials
Material ρ · 10− 3 ,kg/m 3
E ,GPa
ν G ,GPa
β Θ · 106 ,K− 1
cT · 103 ,MJ/(kg · K)
λ · 105 ,MW/(m · K)
α S · 106 ,MW/(m · K)
M s , K(A s , K)
M f , K(A f , K)
Source
Berylliumbronze (BrB2) 8.2 135 0.35 50 16.6 0.38 17.0 18.0 — — [23–25]Shape memoryalloy:
Martensite 6.5 28 0.3 28 6.6 0.5 1.0 18.0 313 293 [12, 15–18]Austenite 6.5 84 0.3 84 11.0 0.5 1.0 18.0 323 343 [12, 15–18]
Note: Specic heat, thermal conductivity, and heat transfer coefficient are averaged for the two phases (martensite and austenite).
As a result of the transition from the intermediate conguration to the close current conguration, the varia-tional equation (2.3) for the increment in the total displacement vector which relates the intermediate and currentconguration becomes
V 0
J T · ·δedV 0 + V 0
J (T ·h t ) · ·δhdV 0 + θ V 0
J B (T ) · ·δedV 0
+
V 0
J 3A (T )
2(σi ) −3 S · ·A (T ) [
−2(σi )2 I 1(e) + 2 S
· ·(T
·h t ) + θ S
· ·B (T )
+ S · ·LIV · ·(e −eP h −eΘ )] dV 0 +
V 0
J (LIV · ·(e −eP h −eΘ )) · ·δedV 0 = 0. (2.4)
Here δe = ( δ u + ( δ u )t )/ 2 and δh = ( δ u )t .Below we give solutions of three problems used as tests to verify the proposed formulations and describe the
effects occurring when using SMAs.Problem 1. Two plates of the same length l = 0 .1 m [one plate of thickness h1 = 0.5·10− 3 m made of BrB2
beryllium bronze, and the other of thickness h2 = 10 − 3 m made of an SMA (equally atomic titanium nickelide)]are fastened together along the length without tension. The two-layer plate is subjected to a plane (along thewidth) deformation at temperature Θ A which corresponds to the fully austenitic state of the SMA. One end of the
sample is xed (zero displacements are specied on it), and the remaining surfaces are free from loads. The sampleis rst cooled to the temperature Θ M corresponding to the martensitic state of the SMA and is then reheated tothe temperature Θ A . Thus, the SMA rst undergoes the forward martensitic transformation and then the reversemartensitic transformation.
Problem 2. Before the two plates are fastened together (see Problem 1), the SMA plate of thickness h2 =10− 3 m at the temperature Θ A corresponding to the fully austenitic state of the material is subjected to uniaxialuniform tension along the length by a stress 100 MPa. This stress corresponds to the data of the experimentdescribed in [22], in which a weight of 1 kg stretches a plate with a cross section of 3 mm ×40 µm. Then, plateis cooled to the temperature Θ M corresponding to the fully martensitic state of the SMA, after which the loadis removed. The plates having the same length l = 0 .05 m are fastened along the length without tension at thetemperature Θ M . It is assumed that at this temperature, the bronze plate has thickness h1 = 0 .5 ·10− 3 m. Theresulting two-layer plate subjected to plane (along the width) deformation is xed at one end (on which zero
displacements are specied), while the other surfaces are free of loads. The plate is heated to the temperature Θ Acorresponding to the fully austenitic state of the SMA, and then cooled to the temperature Θ M .
Problem 3. An SMA plate of length l = 0.05 m and thickness h = 1.5 ·10− 3 m is xed at end and at thetemperature Θ A , subjected to a plane (along the thickness) strain, is bended by a shear stress of 20 MPa appliedto the other end, and is cooled to the temperature Θ M , after which the load is removed. The resulting bent plateis reheated to the temperature Θ A .
The mechanical and thermal properties of the materials for which the above three problems are solved arelisted in the table ( ρ is the density, E is the Young’s modulus, ν is the Poisson’s ratio, G is the shear modulus,
303

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 10/13
β Θ is the coefficient of linear thermal expansion, and M s , M f , As , and A f are the phase-transition temperatures).In addition, the table shows the specic heat cT , thermal conductivity λ, and the heat-transfer coefficient αS whichare not are used in this paper.
The dimensions h1 and h2 in Problems 1 and 2 are selected so as to satisfy the condition of maximumdeection of a two-layer plate specied in [23, 24]. In [23, 24], the bending angle of a heated (cooled) plate of length l consisting of two layers of thickness h1 and h2 with Young’s modulus E 1 and E 2 and linear thermalexpansion coefficients β 1 and β 2 are dened by the relation = k0 l ∆ θ, where ∆ θ is the temperature increment, the
coefficient k0 depends on h1 , h2 , E 1 , E 2 , β 1 , and β 2 and takes the maximum value max k0 = (3 / 2)(β 1 −β 2)/ (h1 + h2)when E 1h21 −E 2h2
2 = 0, which implies that h1 /h 2 = E 2 /E 1 . Using the Young’s modulus for bronze as E 1and the Young’s modulus of the martensite phase of the SMA as E 2 , we obtain h1 /h 2 = 0 .455 ≈ 0.5, whichimplies that h1 = 0.5h2 . The length l was chosen so as to obtain a large angle and its corresponding largedisplacement w of the free end of the two-layer plate. For the maximum k0 , the angle and displacement are givenby the relations = 3 ∆ l/ (2(h1 + h2)) and w = l/ 2, where ∆ = ( β 1 −β 2) ∆ θ. According to the data of [23], themaximum value of β 1 −β 2 for the bimetals used in real devices and structures is 20 ·10− 6 K− 1; for ∆θ = 100 K, thevalue of ∆ becomes equal to 0.002, i.e., 0.2%. For the bimetal considered in the present paper, the greatest valueof β 1 −β 2 is 10− 5 K− 1 , and the interval of the phase-transition temperatures ∆ θ (∆ θ = M s −M f or ∆ θ = Af −As )is about 30 K (see the table). Consequently, the temperature strain ∆ ≈0.03%. In this case, as shown below, thephase strains can be two orders of magnitude greater.
Let us return to relations (1.19) and (1.20), which for small strains have the form
deP h = ( βg + c0S + a0eP h ) dq , dq > 0; (2.5)
deP h = a0e(0)
P h
exp( a0q 0 ) −1 + a0eP h dq, dq < 0. (2.6)
Since below we consider only phase strains, for simplicity the subscript P h will be omitted. We consider a straightrod of SMA in a uniaxial stress state (USS) at constant stresses. The basis vector k is directed along the axis of therod. Then, the stress is equal to T = T kk and its deviatoric part is S = −(1/ 3)T (ii + jj )+(2 / 3)T kk (T and S areconstant during the phase transition). In this case, Eqs. (2.5) and (2.6) have a simple solution. For the componentcorresponding to the dyad kk , Eq. (2.5) leads to the equality
dek
β + 2 c0 T / 3 + a0ek= dq ek =
β + 2 c0 T / 3a0
[exp (a0) −1], (2.7)
and for the components corresponding to the dyads ii and jj , the above equation leads to the equalities
dei
β −c0 T / 3 + a0ei= dq ei =
β −c0 T / 3a0
[exp(a0) −1]. (2.8)
Here the integration over the phase strains is performed from 0 to ek or to ei , and the integration over theparameter q , from 0 to 1. In the absence of stresses, relations (2.7) and (2.8) coincide. Equation (2.6) leadsto the equality
en = e(0)
n
exp( a0q 0) [exp(−a0) −1] + e(0)
n exp(−a0), n = i , j ,k, (2.9)
where the integration over the phase strains is performed from e(0)n to en , and the integration over the parameter q ,
from q 0 to 0; q 0 and e(0)n are the values of q and en at the starting point of the reverse martensitic transformation.
Using the strains ek (2.7) or ei (2.8) as e(0)n and setting q 0 = 1, from (2.9) we obtain en = 0, i.e., the forward
transformation gives rise to strains, which are identical in the absence of stresses and disappear in the reversetransformation.Using relation (2.7) and the constants for SMAs [see (1.15), (1.19), and (1.20)], we calculate the axial strain ek
that arises during the complete forward transformation. In the absence of stresses, we have ek = 0.0017, which iscomparable with the thermal strains upon a temperature change of 100 K. For a tensile stress T = 100 MPa, wehave ek = 0.029, which is about 100 time larger than the temperature strains accompanying this process.
The above estimates are valid for small displacements and strains but they can be used to justify the choiceof the thickness and length of each layer of the plate.
304

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 11/13
(b)
(a)
(c)
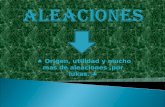
Fig. 2. Bending of the plates for Problem 1 (a), Problem 2 (b), and Problem 3 (c): the initial andnal states of the plates are denoted by the dashed and solid lines, respectively.
All the three problems are solved using the Lagrangian (material) coordinates. We employ the followingalgorithm to solve these problems. The cooling (heating) process is divided into a number of rather small steps. Thequantities with subscript asterisk are known from the solution of the problem at the previous step. The temperaturechange θ is specied. Numerical solution of Eq. (2.4) is performed by the nite element method. As a result, wedetermine the increment in the displacement vector u at this step. Knowing u , we construct the elds h = ( u )t , e,and d. Using (1.21) and (1.22), we determine eP h , obtain eΘ = β Θ θg from the known value of θ, and nd dP h and dΘ
from (1.23). Using these quantities, we can construct the tensors eE = e−eP h −eΘ and dE = d−dP h −dΘ and thendetermine the tensors F E , F P h , F Θ (1.6)–(1.8), and E P h (1.12) and all kinematic quantities that depend on them.The value of T is calculated from relations (1.30)–(1.32), the values of σi , ξ , q , and Θ are calculated from relations(1.16)–(1.18), E , G, and Λ from relations (1.27)–(1.29), and T ,Λ and T ,G from (1.33) and (1.34). All these quantitiescorrespond to the end of the previous step and the same time, they are the initial conditions for the next step.Assigning the subscript “ ” to the specied quantities, we solve the variational equation (2.4) for the next step. Atthe initial time in the unloaded and undeformed congurations over the entire material, T = ( T ,Λ) = ( T ,G ) = 0,F = F E = F P h = F Θ = g, q = 0, Λ = Λ A , and G = GA .
In the numerical solution of all three problems, we used a grid of triangular nite elements and a quadraticapproximation of the displacement increment eld. At each step, we assumed a temperature change θ = 0.5 K andtook into account the temperature expansion of the materials.
Problem 1 was solved on a 12 ×800 grid: 4×800 for bronze and 8 ×800 for SMA. Figure 2a shows the shape
of the two-layer plate (the bottom layer of SMA) in the initial position at the temperature Θ A (dashed curve),where the SMA is entirely in the austenitic state, and the shape of this plate cooled to the temperature Θ M (solidcurve) when the SMA is entirely in the martensitic state. Cooling gives rise to temperature compression strainsin both bronze and the SMA, which are larger in bronze than in the SMA since the thermal expansion coefficientis larger (see the table). Therefore, the SMA is mainly in tension and the phase strains arising in the materialalong with thermal strains during the austenitic–martensitic transition are mostly tensile strains. This leads to theupward bending of the two-layer plate. The calculated displacement of the free end of the plate (almost any of itspoint) is 5 .64 ·10− 3 m (5.64% of the length). In Fig. 2a, the displacement and length of the plate are on the same
305

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 12/13
scale. Under subsequent heating to the temperature Θ A , the plate takes the same shape as that in the initial state(dashed lines).
Problem 2 was solved on a 12 ×400 grid: 4 ×400 for bronze and 8 ×400 for the SMA (because the lengthof the plate is half that in problem 1). Figure 2b shows the shape of the two-layer plate (the bottom layer of SMA) in the initial position (dashed curve) where the SMA plate at the temperature Θ A corresponding to the fullyaustenitic state is subjected to uniaxial uniform tension along the length by a stress of 100 MPa. Then, the plate iscooled to the temperature Θ M corresponding to the fully martensitic state, and, after the removal of the load, it is
fastened without tension with the bronze plate. In this case, tensile phase strains are accumulated and “frozen” inthe SMA plate; upon subsequent heating to the temperature Θ A , the stains disappear. As a result, the two-layerplate shrinks and bends down (denoted by the solid lines in Fig. 2b; the displacement and length of the plate are onthe same scale). The free end of the plate (its middle point) is shifted by a distance equal to 2 .8 ·10− 2 m (55.88%of the length). The subsequent cooling of the two-layer plate to the temperature Θ M leads to its almost completereturn to the original position (denoted by the dashed lines).
Problem 3 was solved on 12 × 400 grid. In Fig. 3a, dashed lines show the initial state of the plate of SMA at the temperature Θ A , and the solid lines show its state after bending at the temperature Θ A by a shearstress of 20 MPa applied to the free end, followed by cooling to the temperature Θ M and removal of the load(the displacement and length of the plate are on the same scale). In this case, stress–strain phase deformation areaccumulated and “frozen” in the plate, which disappear upon subsequent heating to the temperature Θ A . As aresult, the plate straightens and returns to the initial state (denoted by the dashed lines in Fig. 2c). The free endof the plate (its middle point) is shifted by a distance equal to 1 .15
·10− 2 m (23.06% of the length).
CONCLUSIONS
A model of the behavior of a shape memory alloy at nite deformations is constructed. The approachdescribed in [6] was used, which allows constructing equations describing material behavior in thermo-elastic–inelastic processes in accordance with the principles of thermodynamics and objectivity (in particular, evolutionequations with the corresponding objective derivative). The model was tested on a number of problems.
This work was supported by the Council for Grants of the President of the Russian Federation forState Support of Leading Scientic Schools (Grant Nos. NSh-8055.2006.1, NSh-3717.2008.1, NSh-7529.2010.1,and NSH-5389.2012.1), programs of basic research of the Department of Energy, Engineering, Mechanics, andControl of the RAS (Grant Nos. 09-T-1-1006 and T-12-1-1004), programs of joint basic research carried outby UB RAS, SB RAS, and FEB RAS (Grant Nos. 09-S-1-1008, 12-S-1-1015), Federal Agency for Scienceand Innovations (Government contract No. 02.740.11.0442), and the Russian Foundation for Basic Research(Grant Nos. 10-01-00055 and 12-01-00419).
REFERENCES
1. R. S. Novokshanov and A. A. Rogovoi, “Construction of Evolution Constitutive Relations for Finite Deforma-tions,” Izv. Ross. Akad. Nauk, Mekh. Tverd. Tela, No. 4, 77–95 (2002).
2. R. S. Novokshanov and A. A. Rogovoi, “Evolution Constitutive Equations for Finite Viscoelastic Deformations,”Izv. Ross. Akad. Nauk, Mekh. Tverd. Tela, No. 4, 122–140 (2005).
3. A. A. Rogovoi, “Constitutive Relations for Finite Elastic–Inelastic Deformation,” Prikl. Mekh. Tekh. Fiz. 46
(5), 138–149 (2005) [Appl. Mech. Tech. Phys. 46 (5), 730–739 (2005)].4. A. A. Rogovoi, “Thermodynamics of Finite-Strain Elastic–Inelastic Deformation,” Prikl. Mekh. Tekh. Fiz. 48(4), 144–153 (2007) [Appl. Mech. Tech. Phys. 48 (4), 591–598 (2007)].
5. A. A. Rogovoi, “Kinematics of Finite-Strain Elastic–Inelastic Deformation,” Prikl. Mekh. Tekh. Fiz. 49 (1),165–172 (2008) [Appl. Mech. Tech. Phys. 49 (1), 136–141 (2008)].
6. A. A. Rogovoy, “Formalized Approach to Construction of the State Equations for Complex Media under FiniteDeformations,” Contin. Mech. Thermodyn. 24 , 81–114 (2012).
7. C. A. Trusdell, A First Course in Rational Continuum Mechanics (J. Hopkins Univ., Baltimore, 1972).
306

8/12/2019 aleaciones con memoria
http://slidepdf.com/reader/full/aleaciones-con-memoria 13/13
8. A. A. Movchan, L. G. Sil’chenko, S. A. Kazarina, and Tant Zin Aung, “Constitutive Relations for Shape MemoryAlloys: Micromechanics, Phenomenology, and Thermodynamics,” Uch. Zap. Kazan. Univ., Ser. Fiz.-Mat. Nauki152 (4), 180–194 (2010).
9. J. G. Boyd and D. C. Lagoudas, “A Thermodynamical Constitutive Model for Shape Memory Materials. Part 1.The Monolithic Shape Memory Alloy,” Int. J. Plasticity 12 (6), 805–842 (1996).
10. M. A. Qidwai and D. C. Lagoudas, “Numerical Implementation of a Shape Memory Alloy ThermomechanicalConstitutive Model Using Return Mapping Algorithms,” Int. J. Numer. Methods Eng. 47 , 1123–1168 (2000).
11. T. J. Lim and D. L. McDowell, “Cyclic Thermomechanical Behavior of a Polycrystalline Pseudoelastic ShapeMemory Alloy,” J. Mech. Phys. Solids, 50 , 651–676 (2002).
12. F. Auricchio and L. Petrini, “A Three-Dimentional Model Describing Stress-Temperature Induced Solid PhaseTransformations: Thermomechanical Coupling and Hybrid Composites Applications,” Int. J. Numer. MethodsEng. 61 , 716–737 (2004).
13. F. Auricchio and L. Petrini, “A Three-Dimentional Model Describing Stress-Temperature Induced Solid PhaseTransformations: Solution Algorithm and Boundary-Value Problems,” Int. J. Numer. Methods Eng. 61 , 807–836 (2004).
14. A. A. Movchan, “Selecting a Phase-Diagram Approximation and a Model of the Disappearance of Martensitefor Shape Memory Alloys,” Prikl. Mekh. Tekh. Fiz. 36 (2), 173–181 (1995) [Appl. Mech. Tech. Phys. 36 (2),300–307 (1995)].
15. A. A. Movchan, P. V. Shelymagin, and S. A. Kazarina, “Constitutive Equations for Two-Step ThermoelasticPhase Transformations,” Prikl. Mekh. Tekh. Fiz. 42 (5), 152–160 (2001) [Appl. Mech. Tech. Phys. 42 (5),
864–871 (2001)].16. A. A. Movchan and L. G. Sil’chenko, “Analytical Solution of the Coupled Problem of Stability of a Plate of Shape Memory Alloy in the Reverse Martensitic Transformation,” Izv. Ross. Akad. Nauk, Mekh. Tverd. Tela,No. 5, 164–178 (2004).
17. A. A. Movchan and Tu. Ya. Cho, “Solution of Boundary-Value Problems of the Forward and Reverse Transfor-mation in the Nonlinear Theory of Deformation of Shape Memory Alloys,” Mekh. Kompoz. Mater. Konstr. 13(4) 452–468 (2007).
18. A. A. Movchan and Tu. Ya. Cho, “Solution of a Coupled Thermoelektromehanical Problem for a Rod of ShapeMemory Alloy in the Theory of Nonlinear Deformation of These Materials,” Mekh. Kompoz. Mater. Konstr.14 (3), 443–460 (2008).
19. A. I. Lur’e, Theory of Elasticity (Nauka, Moscow, 1970) [in Russian].20. A. I. Lur’e, Nonlinear Elasticity Theory (Nauka, Moscow, 1980) [in Russian].21. A. A. Movchan, “Accounting for the Variability of the Elastic Moduli and the Effect of Stresses on the Phase
Composition in Shape Memory Alloys,” Izv. Ross. Akad. Nauk, Mekh. Tverd. Tela, No. 1, 79–90 (1998).22. A. I. Irzhak, V. V. Istomin, V. V. Koledov, et al., “Ordering, Martensitic Transformation, and Shape Memory
Effect in Submicron Samples of Rapidly Quenched Ni 50 Ti 25 Cu 25 alloy,” Izv. Ross. Akad. Nauk, Ser. Fiz. 73(8), 1141–1143 (2009).
23. B. A. Ass and N. M. Zhukova, Parts and Units of Aircraft Instruments and Their Calculation (Oborongiz,Moscow, 1960) [in Russian].
24. L. E. Andreeva, Elastic Elements of Instruments (Mashgiz, Moscow, 1962) [in Russian].25. A. P. Babichev, N. A. Babushkina, A. M. Bratkovskii, et al., Physical Quantities: Handbook , Ed. by
I. S. Grigor’ev and E. Z. Meilikhov (Energoatomizdat, Moscow, 1991) [in Russian].
307