acuaciones difernciales 1

of 115
-
Upload
lupillo-rey-del-pulque -
Category
Documents
-
view
213 -
download
0
Transcript of acuaciones difernciales 1
-
7/30/2019 acuaciones difernciales 1
1/115
Ecuaciones Diferenciales I
Artemio Gonzalez Lopez
Madrid, enero de 2004
-
7/30/2019 acuaciones difernciales 1
2/115
Indice general
1 Introduccion 1
1.1 Preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Tecnicas elementales de integracion . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 y = f(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 Ecuaciones con variables separadas . . . . . . . . . . . . . . . . . 31.2.3 Ecuaciones homogeneas . . . . . . . . . . . . . . . . . . . . . . . 61.2.4 Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.5 Ecuacion de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . 91.2.6 Ecuacion de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.7 Ecuaciones exactas y factores integrantes . . . . . . . . . . . . . 12
1.3 Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . 161.3.1 Funciones lipschitzianas . . . . . . . . . . . . . . . . . . . . . . . 19
2 Ecuaciones y sistemas lineales 27
2.1 Estructura del espacio de soluciones . . . . . . . . . . . . . . . . . . . . 28
2.2 Wronskiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.2.1 Formula de AbelLiouville . . . . . . . . . . . . . . . . . . . . . 322.2.2 Metodo de variacion de constantes de Lagrange . . . . . . . . . . 33
2.3 Sistemas con coeficientes constantes . . . . . . . . . . . . . . . . . . . . 342.4 Calculo de la exponencial de una matriz . . . . . . . . . . . . . . . . . . 37
2.4.1 Polinomio interpolador de Lagrange . . . . . . . . . . . . . . . . 412.5 Ecuaciones de orden n . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.5.1 Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . 462.6 Ecuaciones lineales con coeficientes constantes . . . . . . . . . . . . . . . 52
2.6.1 Solucion de la ecuacion inhomogenea . . . . . . . . . . . . . . . . 542.7 Estabilidad de sistemas y ecuaciones lineales . . . . . . . . . . . . . . . . 57
2.7.1 Criterio de RouthHurwitz . . . . . . . . . . . . . . . . . . . . . 62
3 Soluciones en forma de serie 65
3.1 Puntos regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.1.1 Funciones analticas . . . . . . . . . . . . . . . . . . . . . . . . . 663.1.2 La ecuacion de Hermite . . . . . . . . . . . . . . . . . . . . . . . 71
3.2 Puntos singulares regulares . . . . . . . . . . . . . . . . . . . . . . . . . 783.2.1 La ecuacion de Bessel . . . . . . . . . . . . . . . . . . . . . . . . 853.2.2 El punto del infinito . . . . . . . . . . . . . . . . . . . . . . . . . 93
i
-
7/30/2019 acuaciones difernciales 1
3/115
INDICE GENERAL ii
4 Sistemas dinamicos en el plano 97
4.1 Resultados generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 974.2 Sistemas dinamicos lineales en R2 . . . . . . . . . . . . . . . . . . . . . 1034.3 Sistemas dinamicos no lineales en R2 . . . . . . . . . . . . . . . . . . . . 107
-
7/30/2019 acuaciones difernciales 1
4/115
Captulo 1
Introduccion
1.1 Preliminares
En general, una ecuacion diferencial es una expresion que relaciona el valor de unafuncion (o funciones) incognita(s) en cada punto con el de sus derivadas parciales en elmismo punto. Por ejemplo, la expresion
u
x(x, y) +
u
y(x, y) = 0 (1.1)
es una ecuacion diferencial. Las soluciones de la ecuacion anterior, es decir las funcionesu(x, y) para las cuales dicha ecuacion se verifica identicamente (en todos los puntos (x, y)pertenecientes a un abierto D R2), son las funciones de la forma
u(x, y) = f(x y) ,donde f es una funcion derivable arbitraria.
Ejemplo 1.1. La ecuacion
u
x(x, y) +
u
y(y, x) = 0
no es una ecuacion diferencial, ya que las derivadas parciales de u no estan evaluadasen el mismo punto.
Una ecuacion como (1.1), en la que la funcion incognita u depende de mas de unavariable, se denomina ecuacion en derivadas parciales. Por el contrario, si u es unafuncion de una variable la ecuacion diferencial se dice ordinaria. Son estas ecuaciones las
que nos interesaran fundamentalmente en este curso, por lo que daremos a continuacionuna definicion mas cuidadosa de ellas.
Definicion 1.2. Un sistema de ecuaciones diferenciales ordinarias (EDOs) es unsistema de ecuaciones del tipo
F
x,y,y, . . . , y(n)
= 0 , (1.2)
donde F = (F1, . . . , F p) : R Rm Rm n+1 veces
Rp es una funcion definida en un
abierto U. Una solucion de (1.2) es una funcion u : R Rm n veces derivable en unintervalo abierto D R que verifica
Fx, u(x), u(x), . . . , u(n)(x) = 0 , x D .1
-
7/30/2019 acuaciones difernciales 1
5/115
CAPITULO 1. INTRODUCCION 2
Notacion:
u(k) = dkudxk
p = numero de ecuaciones del sistema (el sistema F = 0 es equivalente a las p ecua-
ciones F1 = = Fp = 0, donde Fi es la i-esima comp onente de F). m = numero de funciones incognitas (la funcion incognita vectorial y : R Rm esequivalente a las m funciones incognitas escalares y1, . . . , ym : R R, donde yi es lai-esima comp onente de y). Generalmente, p = m .
n = orden del sistema. Se supone que alguna derivada parcial Fiy
(n)j
no es identica-
mente cero, para que alguna derivada n-esima de y aparezca en el sistema.
Ejemplo 1.3.
y1 = B(y1, y2) y2
y2 = B(y1, y2) y1
(donde B(y1, y2) es una funcion dada) es un sistema de dos ecuaciones de orden 2(describe el movimiento de una partcula de carga unidad en el plano (y1, y2) bajo laaccion de un campo magnetico de intensidad B(y1, y2) perpendicular a dicho plano).
1.2 Tecnicas elementales de integracion
Comenzaremos estudiando el caso mas sencillo de una ecuacion escalar de primerorden (n = m = p = 1)
F(x,y ,y) = 0 .Muchas veces es posible despejar y en funcion de (x, y) de la ecuacion anterior, obte-niendose as la ecuacion escalar de primer orden en forma normal
y = f(x, y) .
1.2.1 y = f(x)
Si f es continua en un intervalo abierto D, la ecuacion se resuelve integrando ambosmiembros a partir de un punto cualquiera x0 D:
y =x
x0
f(s) ds + c ,
donde c = y(x0) es una constante arbitraria.
La solucion general de la ecuacion anterior depende de una constante arbitraria c R(el punto x0 se fija de antemano).
El problema de valor inicial
y = f(x) , y(x0) = y0
tiene la solucion unica y = xx0 f(s) ds + y0.
-
7/30/2019 acuaciones difernciales 1
6/115
CAPITULO 1. INTRODUCCION 3
1.2.2 Ecuaciones con variables separadas
y =f(x)
g(y)
, (1.3)
con f, g continuas en sendos intervalos abiertos U, V, y g(y) = 0 para todo y V.Solucion. Toda solucion y(x) satisface
g
y(s)
y(s) = f(s) =x
x0
g
y(s)
y(s) ds =x
x0
f(s) ds .
Haciendo el cambio de variable t = y(s) en la primera integral se obtieney(x)y(x0)
g(t) dt =
xx0
f(s) ds .
Si y0 es un punto arbitrario (pero fijo) de V, vemos que toda solucion y(x) ha de satisfacerla ecuacion implcita y
y0
g(s) ds =
xx0
f(s) ds + c , (1.4)
donde c =y(x0)
y0g(s) ds es una constante arbitraria. Recprocamente, derivando (1.4)
(considerando a y como funcion de x) se comprueba que toda funcion y(x) que verifique(1.4) es solucion de (1.3). Se dice que la expresion (1.4) es la solucion general de (1.3).
Estudiemos mas detenidamente la solucion general (1.4). Es de la forma
(x, y) = c , con (x, y) =y
y0
g(s) ds xx0
f(s) ds . (1.5)
La ecuacion (1.5) define implcitamente una familia a un parametro de curvas planas.Cada curva de la familia (que se obtiene fijando el valor del parametro c) tiene lapropiedad de que su pendiente y en un punto cualquiera (x, y) de la curva satisfacela ecuacion (1.3), es decir y = f(x)/g(y). Este tipo de curvas se denominan curvasintegrales de la ecuacion (1.3). Notese que una solucion de (1.3) no es mas que unafuncion cuya grafica esta contenida en una curva integral.
Sea (a, b) U V un punto del plano, por el que pasa la curva de la familia (1.5)con c = (a, b). Por el teorema de la funcion implcita, la relacion (1.5) define en un
entorno del punto (a, b) una funcion y(x) tal que y(a) = b si
y(a, b) = g(b) = 0 ,
condicion que se cumple por la hipotesis hecha sobre g. (Notese que es de clase C1(UV), por lo que el teorema es aplicable.) Esta funcion es solucion de la ecuacion diferencial(1.3) (ya que satisface la relacion implcita (1.5)) con la condicion inicial y(a) = b. Elteorema de la funcion implcita garantiza que esta solucion es unica localmente (enun entorno de a), ya que dicho teorema garantiza la unicidad local de la funci on y(x)que satisface la relacion implcita (1.5) junto con la condicion y(a) = b. Por tanto, elproblema de valor inicial asociado a la ecuacion (1.3) tiene solucion unica local si losdatos iniciales estan en el abierto U V.
-
7/30/2019 acuaciones difernciales 1
7/115
CAPITULO 1. INTRODUCCION 4
3
2
1
0
1
2
3
y
3 2 1 1 2 3x
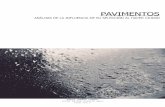
Figura 1.1: Curvas integrales de la ecuacion y = x/y.
Ejemplo 1.4. Consideremos la ecuacion
y = xy
, (1.6)
que es del tipo anterior con f(x) = x, U = R, g(y) = y. Como g se anula en 0, comointervalo V podemos tomar o bien V+ = R
+ (numeros reales positivos) o bien V = R,pero no V = R. La integracion de esta ecuacion es inmediata, siendo la solucion general
y2 + x2 = c , (1.7)
con c > 0 una constante arbitraria. Las curvas integrales son pues circunferencias deradio
c (fig. 1.4). Si hemos tomado V = R+, entonces y > 0, y por tanto de (1.7) se
sigue quey =
c x2 , (1.8)
que esta definida (y es derivable) en el intervalo abierto (c, c). Por el contrario, sitomamos V = R entonces y < 0, y la solucion general es entonces
y =
c x2 , c < x < c . (1.9)
As, en este caso cada curva integral (1.7) da lugar a dos soluciones (tiene dos ramas).Utilizando las expresiones (1.8) y (1.9) es facil probar que el problema de valor inicial
y(x0) = y0 para la ecuacion (1.6) tiene solucion unica para todo (x0, y0) con y0 = 0.La ecuacion diferencial (1.6) no tiene sentido en el eje horizontal, ya que ah se anula eldenominador del miembro derecho. En cuanto a las soluciones (1.8)(1.9), ambas tienenlmite cero cuando x c , pero su derivada tiende a infinito en estos puntos.Ejemplo 1.5. Sea ahora la ecuacion con variables separadas
y = y2 cos x . (1.10)
Ahora f(x) = cos2 x, U = R, g(y) = 1
y2 , V = R
+ o V = R. Sin embargo, notese queahora el miembro derecho de la ecuacion tiene sentido (es continuo, de hecho C) en
-
7/30/2019 acuaciones difernciales 1
8/115
CAPITULO 1. INTRODUCCION 5
4
2
0
2
4
y
10 8 6 4 2 2 4 6 8 10x
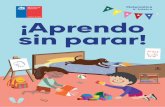
Figura 1.2: Soluciones de la ecuacion y = y2 cos x.
todo el plano (x, y). De hecho, en este caso y(x) = 0 es obviamente solucion de (1.10).Si y = 0 la ecuacion se integra de la forma usual (dividiendo por y2):
y
y2= cos x = 1
y= sen x c y = 1
c sen x , (1.11)
con c R constante arbitraria. Notese que la solucion y = 0 no esta contenida en laexpresion anterior para ningun valor de finito de c (formalmente, se obtendra haciendoc
). Tambien es evidente que ninguna de las soluciones (1.11) corta a la solucion
y = 0.El comportamiento de las soluciones (1.11) depende de que |c| 1 o |c| > 1. En
este ultimo caso el denominador de (1.11) nunca se anula, por lo que las soluciones con|c| > 1 estan definidas en todo R (fig. 1.5). Sin embargo, si |c| 1 entonces
c = sen x x = arc sen c + 2k o x = arcsen c + (2k + 1) , k Z ,por lo que el denominador se anula infinitas veces, y la soluci on y = (c sen x)1tiene infinitas asntotas verticales (cf. fig. 1.5). Mas propiamente, si |c| 1 la expresion(1.11) define infinitas soluciones, cada una de ellas con intervalo de definicion (xi, xi+1)limitado por dos ceros sucesivos de la ecuacion sen x = c. En este caso tanto la solucioncomo sus(s) derivada(s) tienden a infinito cuando nos aproximamos a los lmites de dichointervalo.
Notese que tanto en este ejemplo (para |c| 1) como en el anterior las solucionesno estan definidas en toda la recta real. En el ejemplo anterior, esto era debido a queeventualmente toda solucion se aproxima a la recta y = 0, en que el miembro derecho dela ecuacion (1.6) es discontinuo (tiende a infinito, si x = 0). Sin embargo, en este casolas soluciones tienen singularidades en puntos en que el miembro derecho de la ecuaciondiferencial es continuo (en este caso, el miembro derecho de (1.10) es continuo, de hechoC, en todo el plano). Dicho de otro modo, no es posible averiguar la existencia yla posicion de estas singularidades estudiando las singularidades del miembro derechode (1.10). Estas singularidades aparecen no porque el miembro derecho de (1.10) seadiscontinuo, sino porque la derivada de la solucion crece cada vez mas rapido, de formaque la solucion explota en un tiempo finito.
-
7/30/2019 acuaciones difernciales 1
9/115
CAPITULO 1. INTRODUCCION 6
Ejercicio. Probar que el problema de valor inicial y(x0) = y0 para la ecuacion (1.10)tiene solucion unica para todo (x0, y0), dada por
y =y0
1 + y0(sen x0 sen x) .Notese que esta expresion contiene a la solucion y = 0 (se obtiene para y0 = 0).
1.2.3 Ecuaciones homogeneas
Se trata de ecuaciones de primer orden
y = f(x, y) , (1.12)
en que la funcion f es continua en un abierto U R2 y homogenea de grado cero, esdecir
f(tx, ty) = f(x, y) , x, y U , t R , t = 0 .Este tipo de ecuaciones se resuelven transformandolas en una ecuacion de variablesseparadas mediante el cambio
y = x z , (1.13)
valido para x = 0. En efecto,
y = x z + z = f(x,xz) = f(1, z) = z = f(1, z) zx
. (1.14)
La ecuacion anterior tiene soluciones constantes z = para toda raz de la ecuacion
= f(1, ) .
En la variable y estas son soluciones lineales y = x, mientras que las demas solucionesse obtienen integrando (1.14), es decir son de la forma
log |x| + c =y/x dz
f(1, z) z .
Ejemplo 1.6.
y =3xy + 2y2
x2 + xy. (1.15)
Es una ecuacion homogenea (tanto el numerador como el denominador son homogeneosde grado 2), con
f(1, z) =3z + 2z2
1 + z= f(1, z) z = z(z + 2)
z + 1.
Las soluciones lineales son por tanto y = 0 e y = 2x. Las demas soluciones estan dadaspor
log |x| + c =
z + 1
z(z + 2)dz =
1
2
1
z+
1
z + 2
dz =
1
2log |z(z + 2)| ,
de dondez(z + 2) = Cx2
-
7/30/2019 acuaciones difernciales 1
10/115
CAPITULO 1. INTRODUCCION 7
6
4
2
2
4
6
2 1 1 2
y = x x1 + x2
y = 2x
y = x + x1 + x2
y = x + x1 x2
y = x x1 x2
Figura 1.3: Soluciones de la ecuacion (1.15).
con C = e2c constante no nula. Resolviendo esta ecuacion cuadratica en z y sustitu-yendo z = y/x obtenemos finalmente
y = x x
1 + Cx2 . (1.16)
Esta solucion esta definida para todo x si C > 0, y para |x| < 1/
|C| si C < 0(cf. fig. 1.3). En este caso f es singular en las rectas x = 0 y x + y = 0, por lo queel abierto U estara contenido en una de las cuatro regiones abiertas determinadas porla interseccion de estas rectas. En cada una de estas regiones el signo del radical en la
formula anterior esta bien determinado: por ejemplo, si x < 0 y x+y > 0 debera tomarseel signo . Finalmente, notese que haciendo C = 0 en la formula (1.16) obtenemoslas dos soluciones lineales de la ecuacion (1.15).
1.2.4 Ecuaciones lineales
y = a(x) y + b(x) , (1.17)
donde a y b son funciones continuas en un intervalo abierto U. La ecuacion se dicehomogenea si b 0, e inhomogenea (o completa) en caso contrario. La ecuacion linealhomogenea
y = a(x) y (1.18)
es de variables separadas, y por tanto se resuelve facilmente. En efecto, y = 0 es solucion,y si y = 0 se tiene
y
y= a(x) = log |y| =
xx0
a(s) ds + c0 = y = c ex
x0a(s) ds
,
donde c = ec0 es una constante real arbitraria (si c = 0 obtenemos la solucion particulary = 0 excluida al principio). Observese que el conjunto de todas las soluciones de laecuacion homogenea (1.18) es un espacio vectorial de dimension uno.
-
7/30/2019 acuaciones difernciales 1
11/115
CAPITULO 1. INTRODUCCION 8
Para hallar la solucion de la ecuacion completa utilizaremos el metodo de variacionde las constantes, debido a Lagrange, que consiste en expresar la solucion en la forma
y = c(x) ex
x0a(s) ds
, (1.19)
evidentemente basada en la solucion general de la homogenea. Sustituyendo en la ecua-cion diferencial se obtiene
y a(x) y b(x) = c(x) eRxx0
a(s) ds+ c(x) a(x) e
Rxx0
a(s) ds a(x) c(x) eRxx0
a(s) ds b(x)= 0 c(x) = b(x) e
xx0
a(s) ds,
de donde se obtiene
c(x) = c +
xx0
b(t) et
x0a(s) ds
dt ,
donde c R es una constante arbitraria. Utilizando la ecuacion (1.19) llegamos a lasiguiente expresion para la solucion general de la ecuacion lineal completa (1.17):
y = c e
xx0
a(s) ds+ e
xx0
a(s) dsx
x0
b(t) et
x0a(s) ds
dt ,
o, equivalentemente,
y = c e
xx0
a(s) ds+
xx0
b(t) e
xt a(s) ds dt . (1.20)
De nuevo, la solucion depende del parametro arbitrario c. Notese que la expresion anterior tiene la estructura
y = c e
xx0
a(s) ds+ yp(x) ,
donde el primer termino es la solucion general de la ecuacion homogenea e yp(x) esuna solucion particular de la ecuacion completa. Recprocamente, si se conoce cualquiersolucion particular y1(x) de la ecuacion completa entonces y y1(x) es solucion de laecuacion homogenea para toda solucion y de la ecuacion completa, por lo que
y = c ex
x0a(s) ds
+ y1(x) .
De (1.20) se deduce que una solucion particular y1(x) de la ecuacion completa puedecalcularse a partir de una solucion cualquiera no trivial (no identicamente nula) yH(x)de la ecuacion homogenea mediante la formula
y1(x) = yH(x)
xx0
b(t)
yH(t)dt ,
por lo que la solucion general de (1.17) se puede escribir como sigue:
y = c yH(x) + yH(x) x
x0
b(t)
yH(t)dt .
-
7/30/2019 acuaciones difernciales 1
12/115
CAPITULO 1. INTRODUCCION 9
Ejemplo 1.7.
y =x + 2y
x. (1.21)
Esta ecuacion (que tiene sentido solo si x = 0, es decir si x pertenece a las semirrectasR+ o R) es lineal (inhomogenea), ya que se puede escribir
y =2
xy + 1 .
La ecuacion anterior es homogenea, por lo que podra resolverse utilizando el proce-dimiento explicado en la Seccion 1.2.3; sin embargo, en esta seccion la resolveremostratandola como una ecuacion lineal.Solucion general de la homogenea:
y
y
=2
x
=
log
|y
|= 2log
|x
|+ c0 =
y = c x2 , c
R .
Solucion particular de la completa:
yp(x) = x2
x dtt2
= x2 (x1) = x .
Por tanto, la solucion general de la ecuacion (1.21) es
y = c x2 x
(familia de parabolas tangentes a la recta y = x en el origen). Notese que, aunque laecuacion es singular en x = 0, las funciones anteriores son C en el origen.
1.2.5 Ecuacion de Bernoulli
y = a(x) y + b(x) yr , r R , r = 0, 1 , (1.22)con a, b continuas en un intervalo abierto U (los valores r = 0 y r = 1 correspondena ecuaciones lineales, ya resueltas). (Notese que, en general, yr solo tiene sentido paray > 0.) Esta ecuacion se integra reduciendola a una ecuacion lineal mediante un cambiode variable dependiente del tipo
z = yp ,
con p = 0 escogido apropiadamente. En efecto, sustituyendo y = z1/p en la ecuacion(1.22) y operando se obtiene la siguiente ecuacion para z:
z = p
a(x) z + b(x) z1+r1p
,
que es lineal si
1 +r 1
p= 0, 1 .
El ultimo caso hay que descartarlo (ya que r = 1), por lo que queda p = 1 r , y laecuacion anterior se convierte en la ecuacion lineal
z = (1 r)a(x) z + b(x) (y = z 11r ) .
-
7/30/2019 acuaciones difernciales 1
13/115
CAPITULO 1. INTRODUCCION 10
Ejemplo 1.8.
y =2xy y2
x2. (1.23)
Se trata de una ecuacion de Bernoulli con r = 2, ya que puede escribirse
y =2
xy 1
x2y2 .
Haciendo el cambio z = 1/y se obtiene por la ecuacion lineal en z
z = 2x
z +1
x2. (1.24)
La solucion general de la ecuacion homogenea es
z =c
x2.
Una solucion particular de la ecuacion (1.24) es
zp(x) =1
x2
xdt =
1
x.
Por tanto, la solucion general de (1.24) es
z =x + c
x2,
y la de la ecuacion propuesta (1.23)
y =x2
x + c.
Ejercicio. Resolver la ecuacion (1.23) considerandola como una ecuacion homogenea.
1.2.6 Ecuacion de Riccati
y = a(x) + b(x) y + c(x) y2 , (1.25)
con a,b,c continuas en un intervalo abierto U. (Si c 0 la ecuacion de Riccati se reducea una ecuacion lineal, y si a 0 a una de Bernoulli.)
Esta ecuacion, de gran importancia en Fsica Matematica, en general no se puederesolver por cuadraturas (es decir, no es posible obtener una expresion explcita para la
solucion general de la ecuacion en terminos de los coeficientes a,b,c y sus primitivas). Sinembargo, si conocemos una solucion particular y0(x) de la ecuacion podemos reducirlamediante el cambio de variable
u =1
y y0(x)a una ecuacion lineal, que ya hemos visto como resolver en la secci on 1.2.4. En efecto,efectuando el cambio anterior obtenemos
u = y y0(x)
y y0(x)
2
= b(x)
y y0(x)
+ c(x)
y2 y0(x)2
y y0(x)
2
= b(x) u c(x) y + y0(x)y y0(x)
= b(x) + 2c(x)y0(x)u c(x) . (1.26)
-
7/30/2019 acuaciones difernciales 1
14/115
CAPITULO 1. INTRODUCCION 11
Ejemplo 1.9.
y = cos x y sen xcos2 x
y2 .
Es una ecuacion de Riccati, con solucion particular y0
(x) = cos x. Efectuando el cambiode variable
u =1
y cos xobtenemos
u = y + sen x
(y cos x)2 = u2 sen x cos x + y + sen x
cos2 xy2
= u2 sen x + 1
u+
sen x
cos2 x
1
u2+
2cos x
u+ cos2 x
,
y por tanto u verifica la ecuacion lineal
u = (1 + 2 tan x)u + sen xcos2 x
. (1.27)
La solucion general de la ecuacion homogenea es
u = cex
cos2 x,
con c constante. Una solucion particular de la ecuacion completa es
ex
cos2 x
xet sen t dt = 1
2
ex
cos2 x ex(sen x + cos x) = sen x + cos x
2cos2 x.
Por tanto la solucion de la ecuacion lineal (1.27) es
u = cex
cos2 x sen x + cos x
2cos2 x,
y la de la ecuacion de partida
y = cos x +2cos2 x
Cex sen x cos x ,
donde C = 2c es una constante arbitraria.
Si c no es identicamente nula, la ecuacion de Riccati (1.25) se linealiza mediante el
cambio de variable
y = 1c(x)
z
z,
que la transforma en una ecuacion lineal de segundo orden en z. En efecto,
y = 1c(x)
z
z+
c(x)c(x)2
z
z+
1
c(x)
z2
z2= a(x) b(x)
c(x)
z
z+
1
c(x)
z2
z2
y por tanto z es solucion de
z b(x) + c(x)
c(x) z + a(x)c(x)z = 0 . (1.28)
-
7/30/2019 acuaciones difernciales 1
15/115
CAPITULO 1. INTRODUCCION 12
Veremos en el captulo siguiente que la solucion general de esta ecuacion puede expresarseen la forma
z = k1z1(x) + k2z2(x) ,
con k1, k2 R y z1, z2 dos soluciones particulares linealmente independientes. Si con-seguimos hallar explcitamente la solucion general de la ecuacion lineal (1.28), la de laecuacion de Riccati de partida esta dada por
y = 1c(x)
k1z1(x) + k2z
2(x)
k1z1(x) + k2z2(x).
Notese que esta solucion depende de una sola constante arbitraria (el cociente k1/k2o k2/k1).
Ejercicio. La solucion general de la ecuacion de Riccati
y = x + yx + y2
x .
esy = x tan(x c) , c R .
Obtener esta solucion linealizando la ecuacion dada y resolviendo la ecuacion linealcorrespondiente. [Ayuda: la solucion general de la ecuacion z + z = 0 es z = k1 cos x +k2 sen x.]
La estrecha relacion entre la ecuacion de Riccati (1.25) y la ecuacion lineal (1.28) dalugar a multitud de importantes propiedades de las soluciones de la ecuacion de Riccati.As, por ejemplo, si yi(x) (1
i
4) son cuatro soluciones distintas de la ecuacion deRiccati entonces puede probarse que la razon cuadruple
(y4 y2)(y3 y1)(y4 y1)(y3 y2) (1.29)
es constante. En particular, si se conocen tres soluciones particulares distintas y1, y2, y3de la ecuacion de Riccati (1.25) entonces su solucion general y(x) se obtiene despejandoy de la ecuacion
(y y2)(y3 y1)(y y1)(y3 y2) = c , c R . (1.30)
1.2.7 Ecuaciones exactas y factores integrantes
Una ecuacion diferencial de primer orden de la forma
P(x, y) + Q(x, y) y = 0 , (1.31)
con P, Q funciones continuas en un abierto U R2 y Q(x, y) = 0 para todo (x, y) U,se dice exacta en U si existe una funcion f : U R tal que
P(x, y) = fx(x, y) , Q(x, y) = fy(x, y) , (x, y) U . (1.32)
En otras palabras, la ecuacion (1.31) es exacta si
(P, Q) = f en U .
-
7/30/2019 acuaciones difernciales 1
16/115
CAPITULO 1. INTRODUCCION 13
Por tanto, una ecuacion exacta (1.31) puede escribirse
fx(x, y) + fy(x, y) y = 0 .
Si y(x) es una solucion cualquiera de dicha ecuacion entonces
fx
x, y(x)
+ fy
x, y(x)
y(x) =d
dx
f
x, y(x)
= 0 .
De esto se deduce que la solucion general de la ecuacion exacta (1.31)(1.33) esta dadaimplcitamente por
f
x, y
= c .
Por el teorema de la funcion implcita, la ecuacion anterior define localmente a y comofuncion de x en un entorno de cada punto de U (ya que fy(x, y) = Q(x, y) no se anulaen U por hipotesis).
Observese que si (1.31) es una ecuacion exacta y P, Q son de clase C1(U) entonces
Py(x, y) = Qx(x, y) , (x, y) U , (1.33)
ya que (lema de Schwarz) ambos miembros son iguales a fxy(x, y). Recprocamente, pue-de probarse que si se cumple la condicion (1.33) en un abierto simplemente conexoU entonces la ecuacion es exacta. (Un abierto de R2 es conexo si dos puntos cuales-quiera de dicho abierto se pueden unir por una curva continua enteramente contenidaen el abierto. Un abierto conexo es simplemente conexo si toda curva cerrada continuacontenida en el abierto puede deformarse de forma continua a un punto sin salirse delabierto. Intuitivamente, un abierto es simplemente conexo si es conexo (consta de unasola pieza) y no tiene agujeros. Ejemplos de abiertos simplemente conexos son el con-
juntoR2
, un disco abierto, un rectangulo abierto, un triangulo abierto, etc. Los abiertosestrellados y, en particular, convexos de R2 son simplemente conexos. Un abierto nosimplemente conexo es, por ejemplo, R2 menos un punto, un disco abierto menos unode sus puntos, o un anillo.)
Probemos que la condicion (1.33) es suficiente para que la ecuacion (1.31) sea exactasi U = (a, b) (c, d) es un rectangulo abierto (en particular, si U = R2). En efecto, sea(x0, y0) un punto fijo de U. Integrando la ecuacion fx = P respecto de x obtenemos
f(x, y) =
xx0
P(s, y) ds + g(y) ,
donde la funcion g solo puede depender de y. (Notese que los puntos de la forma (s, y)
pertenecen a U si y (c, d) y s (a, b).) Imponiendo la segunda ecuacion fy = Q yaplicando la relacion (1.33) obtenemos una ecuacion diferencial para g:
fy(x, y) = g(y) +
xx0
Py(s, y) ds = g(y) +
xx0
Qx(s, y) ds = g(y) + Q(x, y) Q(x0, y)
= Q(x, y) g(y) = Q(x0, y) .Por tanto,
g(y) =
yy0
Q(x0, s) ds + c ,
y
f(x, y) = x
x0 P(s, y) ds +y
y0 Q(x0, s) ds + c . (1.34)
-
7/30/2019 acuaciones difernciales 1
17/115
CAPITULO 1. INTRODUCCION 14
a b
c
d
U
0
0
(x0, y0)
(x, y)(x0, y)
Figura 1.4: Caminos que unen (x0, y0) con (x, y) en U.
(De nuevo, el segmento vertical (x0, s) con s
(c, d) esta contenido en U.)
La funcion f esta definida a menos de una constante arbitraria. Notese que la formula(1.34) se puede escribir como la integral de lnea
f(x, y) =
0
(P, Q) dr
0
[P(x, y) dx + Q(x, y) dy] ,
donde 0 es el camino quebrado de la fig. 1.4. Como la condicion (1.33) garantiza laindependencia del camino de la integral de lnea
(P dx + Q dy), para toda curva C
1 atrozos U, tambien podemos escribir
f(x, y) =
[P(x, y) dx + Q(x, y) dy] ,
donde es cualquier curva contenida en U que una el punto fijo (x0, y0) U con elpunto variable (x, y) U. Por ejemplo, si es el segmento que une (x0, y0) con (x, y),es decir
(t) = (x0, y0) + t(x x0, y y0) , t [0, 1] ,entonces dx = (x x0) dt, dy = (y y0) dt, y por tanto
f(x, y) =
10
(x x0)P
x0 + t(x x0), y0 + t(y x0)
+ (y y0)Qx0 + t(x x0), y0 + t(y x0)dt .
Ejemplo 1.10.
12x + 5y 9 + (5x + 2y 3)y = 0 . (1.35)Se trata de una ecuacion exacta, ya que
P = 12x + 5y 9 , Q = 5x + 2y 3 = Py = Qx = 5 .
La funcion f tal que f = (P, Q) se encuentra facilmente:
fx = 12x + 5y 9 = f = 6x2 + 5xy 9x + g(y) ;fy = 5x + g
(y) = 5x + 2y 3 g(y) = 2y 3 g(y) = y2 3y + const.
-
7/30/2019 acuaciones difernciales 1
18/115
CAPITULO 1. INTRODUCCION 15
Por tanto, la solucion general de la ecuacion propuesta esta dada implcitamente por laecuacion
6x2 + 5xy + y2 9x 3y = c .
(Se trata de una familia de hiperbolas.)Observese que si (x, y) es una funcion no nula en U la ecuacion (1.31) es equivalentea la ecuacion
(x, y)P(x, y) + (x, y)Q(x, y)y = 0 . (1.36)
A toda funcion tal que la ecuacion anterior sea exacta se le llama un factor integrantepara la ecuacion de partida (1.31). La ecuacion que ha de cumplir el factor integrante es por tanto (si U es, de nuevo, un abierto simplemente conexo del plano)
(P)y = ( Q)x ,
que se puede escribir como la siguiente ecuacion lineal en derivadas parciales de primerorden para :
P(x, y) y Q(x, y) x +
Py(x, y) Qx(x, y)
= 0 . (1.37)
Si se conoce un factor integrante cualquiera de la ecuacion (1.31) dicha ecuacion seresuelve integrando la ecuacion exacta (1.36). Se puede probar que la ecuacion (1.37)tiene (localmente) infinitas soluciones si P, Q son, por ejemplo, de clase C1 en U. Portanto, toda ecuacion de la forma (1.31) posee un factor integrante. El problema es que, engeneral, no hay ninguna forma sistematica para encontrar dicho factor integrante, ya quela ecuacion en derivadas parciales (1.37) es casi siempre mucho mas difcil de resolver quela ecuacion diferencial ordinaria de partida (1.31). Solo si Py Qx es particularmentesencillo se puede dar alguna regla practica para calcular el factor integrante . Por
ejemplo, si Py QxQ
g(x)
solo depende de x entonces (1.31) admite un factor integrante (x) funcion solo de x, yaque en este caso haciendo y = 0 en la ecuacion (1.37) se obtiene la ecuacion diferencialordinaria en x
(x) = g(x) (x) = (x) = c ex
g(t) dt .
Analogamente, si
Py QxP
h(y)
la ecuacion (1.31) posee el factor integrante funcion de y unicamente:
(y) = c ey
h(t) dt .
Ejercicio. Probar que la ecuacion (1.31) posee un factor integrante (r) funcion der =
x2 + y2 si y solo si
Py QxyP xQ = g(r) ,
y que en tal caso puede calcularse por la formula
(r) = c e r t g(t) dt .
-
7/30/2019 acuaciones difernciales 1
19/115
CAPITULO 1. INTRODUCCION 16
Ejemplo 1.11. Consideremos la ecuacion
y2(x2 + y3)y x = 0 . (1.38)
Aqu
Py = 0 , Qx = 2xy2 , = Py Qx
P= 2y2 = h(y) .
La ecuacion posee por tanto el factor integrante
(y) = ey
2t2dt = e23
y3 .
Para integrar la ecuacion hallamos una funcion f tal que f = e 23y3(P, Q), es decir
fx = x e23
y3 = f = 12
x2 e23
y3 + g(y) ;
fy = x2y2 e23y
3
+ g(y) = (x2y2 + y5) e23y
3
= g(y) = y5 e23y
3
.
Por tanto (omitiendo la constante arbitraria)
g(y) =
y5 e
23y
3dy =
1
3
y3t e
23 tdt = 1
4
2y3 + 3
e
23y
3,
de donde
f(x, y) =
1
2x2 +
1
4
2y3 + 3
e
23y
3.
La solucion general de la ecuacion de partida es pues
x2 + y3 = c e23y
3 32
.
(Notese que en este caso puede despejarse x en funcion de y.)
Ejercicio. Resolver la ecuacion (1.38) convirtiendola en una de variables separadas me-diante el cambio z = x2 + y3.
1.3 Existencia y unicidad de soluciones
Hemos visto en la seccion anterior que el problema de valor inicial
y = f(x, y) (1.39)y(x0) = y0 (1.40)
asociado a la ecuacion diferencial de primer orden (1.39) tena solucion unica, salvo paradatos iniciales (1.40) en que la funcion f no era suficientemente regular. En esta seccionvamos a estudiar en detalle el problema de la existencia y unicidad de soluciones delproblema (1.39)(1.40), intentando precisar ba jo que condiciones sobre la funcion f ylos datos iniciales (x0, y0) la solucion es unica. Consideraremos el caso mas general enque la variable dependiente (funcion incognita) y toma valores en Rn:
y = (y1, . . . , yn) Rn , (1.41)
-
7/30/2019 acuaciones difernciales 1
20/115
CAPITULO 1. INTRODUCCION 17
por lo que la funcion f ha de ser una funcion vectorial que tome valores en Rn y definidaen un abierto U de Rn+1:
f = (f1, . . . , f n) : U
Rn+1
Rn , U abierto . (1.42)
La ecuacion (1.39) es por tanto un sistema de n ecuaciones diferenciales de primer ordenen forma normal
y1 = f1(x, y1, . . . , yn)
...
yn = fn(x, y1, . . . , yn) ,
y el dato inicial (1.40) es equivalente a las n condiciones
y1(x0) = y01, . . . , yn(x0) = y0n ,
si y0 = y01, . . . , y0n .La ventaja de considerar a y como una funcion vectorial es que la solucion del
problema (1.39)(1.40) implica la solucion de otros problemas interesantes. En efecto,consideremos la ecuacion escalar mas general de orden n en forma normal
u(n) = F
x,u,u, . . . , u(n1)
, (1.43)
donde u : R R. Esta ecuacion se puede escribir como un sistema de primer ordenintroduciendo (por ejemplo) las variables
yi = u(i1) , 1 i n , (1.44)
(u(0) u) convirtiendose entonces en la ecuacion vectorial (1.39) con
f(x, y) =
y2, . . . , yn, F(x, y1, . . . , yn)
. (1.45)
(Mas precisamente, y(x) es solucion de la ecuacion (1.39)(1.45) si y solo si y(x) =u(x), u(x), . . . , u(n1)(x)
, con u(x) solucion de (1.43).) La condicion inicial (1.40) se
escribe en terminos de la funcion incognita original u como sigue:
u(i)(x0) = y0,i+1 , 0 i n 1 .
En otras palabras, en este caso se asignan valores iniciales (en x = x0) a la funcion uy a sus primeras n 1 derivadas. La solucion del problema (1.39)(1.40) conlleva portanto la solucion del problema de valor inicial para una ecuacion normal de orden n
u(n) = F
x,u,u, . . . , u(n1)
(1.46)
u(i)(x0) = u0i , 0 i n 1 . (1.47)
La existencia local de soluciones del problema de valor inicial (1.39)(1.40) esta ga-rantizada si la funcion f es continua en su abierto de definicion, segun afirma el siguienteteorema, debido al matematico italiano G. Peano (18581932):
-
7/30/2019 acuaciones difernciales 1
21/115
CAPITULO 1. INTRODUCCION 18
Teorema de existencia de Peano. Sea f : U Rn continua en el abierto U, ysea (x0, y0) U. Entonces el problema (1.39)(1.40) tiene (al menos) una soluciony(x) definida en un intervalo de la forma (x0 h, x0 + h), para h > 0 suficientementepequeno.
(El numero h, que es funcion (x0, y0), se puede estimar explcitamente, y depende esen-cialmente de lo grande que sea el valor de f(x, y) en U.)
Es facil convencerse de que la continuidad de f en U no garantiza la unicidad (nisiquiera local) del problema de valor inicial (1.39)(1.40) con datos iniciales en U. Unejemplo muy sencillo es el de la ecuacion
y = 3 y2/3 , (1.48)
para la cual f(x, y) = 3 y2/3 es continua en U = R2. El teorema de Peano garantiza portanto la existencia de por lo menos una solucion del problema de valor inicial asociado a
la ecuacion (1.48) para cualquier dato inicial (x0, y0). Notese, sin embargo, que no existela derivada parcial de primer orden de f respecto de y en el eje horizontal y = 0. (Enparticular, f no es derivable en dicho eje.)
Una solucion de (1.48) es la funcion y(x) = 0, definida en todo R. Si y = 0, integrandola ecuacion (es de variables separadas) obtenemos
y = (x + c)3 , (1.49)
funcion tambien definida en toda la recta real (fig. 1.5). (Se demuestra que la solucion
10
8
6
4
2
0
2
4
6
8
10
2 1 1 2
Figura 1.5: Soluciones de la ecuacion y = 3 y2/3.
particular y = 0, que no se obtiene de (1.49) para ningun valor de c R, es la envolventede la familia de parabolas cubicas (1.49).) Es facil ver que el problema de valor inicialpara la ecuacion (1.48) con la condicion inicial
y(x0) = 0 (1.50)
no tiene solucion unica, ni siquiera localmente. Por ejemplo, las funciones y(x) = 0 ey(x) = (x x0)3 son dos soluciones de dicho problema que no coinciden en ningunintervalo abierto centrado en x0.
-
7/30/2019 acuaciones difernciales 1
22/115
CAPITULO 1. INTRODUCCION 19
1.3.1 Funciones lipschitzianas
Introduciremos a continuacion una condicion sobre la funcion f mas fuerte que la con-tinuidad, que sera suficiente para que el problema de valor inicial (1.39)(1.40) tenga
solucion unica local. Comenzaremos con el caso sencillo de funciones de una variable.
Definicion 1.12. Una funcion f : I R (siendo I un intervalo) es lipschitziana siexiste una constante positiva L > 0 (constante de Lipschitz) tal que
|f(x1) f(x2)| L |x1 x2| , x1, x2 I . (1.51)
f lipschitziana en I = f uniformemente continua en I. Sin embargo, f lipschitziana en I = f derivable en I. Por ejemplo, f(x) = |x| eslipschitziana en cualquier intervalo (con constante de Lipschitz igual a 1), ya que de ladesigualdad triangular se deduce que
||x1| |x2| | |x1 x2| .
La derivabilidad de f no implica en general su lipschitzianidad. Por ejemplo, la funcionf(x) = x2 no es lipschitziana en I = R. En efecto, si lo fuera existira L > 0 tal quex21 x22 = |x1 + x2| |x1 x2| L |x1 x2| , x1, x2 R ,lo que implicara el resultado absurdo
|x1 + x2| L , x1 = x2 .
Proposicion 1.13. Si f es derivable en un intervalo I y f esta acotada en I, entoncesf es lipschitziana en I.
Demostracion. En efecto, si |f(x)| L para todo x I aplicando el teorema del valormedio se obtiene
|f(x1) f(x2)| =f() |x1 x2| L |x1 x2| ,
ya que min(x1, x2), max(x1, x2) I. Q.E.D.Corolario 1.14. f : I R de clase C1 en un intervalo compacto I = f lipschitzianaen I.
Demostracion. Si f C1(I) con I intervalo compacto, f es continua en el intervalocompacto I, por lo que f es necesariamente acotada en dicho conjunto (alcanza, dehecho, sus valores maximo y mnimo en I). La proposicion anterior implica entoncesque f es lipschitziana en I. Q.E.D.
Pasemos a continuacion al caso que en realidad nos interesa, en el que f : R Rn Rn.
-
7/30/2019 acuaciones difernciales 1
23/115
CAPITULO 1. INTRODUCCION 20
Definicion 1.15. Sea f : I D Rn, siendo I R un intervalo y D Rn (nonecesariamente abierto). Diremos que f es lipschitziana en la segunda variable (oen el segundo argumento) en I D si existe L > 0 (de nuevo llamada constante deLipschitz) tal quef(x, y1) f(x, y2) Ly1 y2 , x I , y1, y2 D . (1.52)
En la formula anterior, denota la norma euclidiana en Rn, es decir
v = (v1, . . . , vn) Rn = v =
v21 + + v2n .
La definicion 1.15 es analoga a la 1.12, considerando a la variable x como un parametroy cambiando el valor absoluto por la norma.
Proposicion 1.16. Sea f : I D Rn, con D abierto convexo. Si las derivadasparciales fiyj (1
i
n) existen, son continuas y estan acotadas en I
D, entonces f
es lipschitziana en I D.Demostracion. Sean (x, y1), (x, y2) I D. Aplicando el teorema del valor medio acada componente fi de f obtenemos
fi(x, y1) fi(x, y2) = fi(x, i) (y1 y2) ,
para algun punto i del segmento que une y1 con y2 (contenido en D por ser dicho
conjunto convexo), donde el gradiente esta tomado respecto de las variables (y1, . . . , yn).Por la desigualdad de CauchySchwarz,
fi(x, y1) fi(x, y2) fi(x, i) y
1
y2
nM
y1
y2
siendo M una cota superior de los valores absolutos de las derivadas parciales fiyj en
I D. De esta desigualdad se sigue quef(x, y1) f(x, y2) nM y1 y2Por tanto, f es lipschitziana en I D, y se puede tomar L = nM. Q.E.D.Si las derivadas parciales de f(x, y) respecto de las variables yi son continuas en unabierto U Rn+1 entonces f es localmente lipschitziana en cada punto de U. Estoquiere decir que para todo (x0, y0) U la funcion f es lipschitziana en cualquier cilindrocompacto [x0
, x0 + ]
Br(y0) contenido en U, donde
Br(y0) = {y Rn : y y0 < r} , Br(y0) = {y Rn : y y0 r}
denotan respectivamente la bola abierta o cerrada de centro y0 y radio r. En efecto, al serfiyj
continua en el compacto [x0 , x0 + ] Br(y0) U automaticamente esta acotadaen dicho compacto, y por tanto puede aplicarse la proposicion anterior.
Repasemos a continuacion algunos resultados relativos a la nocion de convergenciauniforme, que seran fundamentales para la demostracion del teorema de PicardLindelof.
Una sucesion de funciones gk : Rm Rn (k N) se dice uniformemente conver-gente a la funcion g en U Rm si para todo > 0 existe N N tal que
k N = g(x) gk(x) < , para todo x U .
-
7/30/2019 acuaciones difernciales 1
24/115
CAPITULO 1. INTRODUCCION 21
Notese que N solo puede depender de , no del punto x U. Analogamente, la serie de funciones k=1 gk converge uniformemente en U si paratodo > 0 existe N N tal que
k=N+1
gk(x)
< , para todo x U . Obviamente, la convergencia uniforme de una funcion (o serie de funciones) en Uimplica su convergencia puntual en cada punto de U, pero el recproco no tiene porque ser cierto.
Criterio M de Weierstrass: si gk(x) Mk para todo x U Rm y k N, y laserie numerica
k=1 Mk es convergente, entonces la serie de funciones
k=1 gk converge
uniformemente en U.
Si la sucesion de funciones gk : Rm Rn (k N) converge uniformemente enU Rm, y cada gk es continua en U, entonces el lmite de la sucesion g = limk gnes una funcion continua en U. Un resultado analogo vale para la suma de una serieuniformemente convergente de funciones continuas (enunciarlo).
Si la sucesion de funciones gk : [a, b] R R (k N) converge uniformementeen [a, b], y cada gk es una funcion integrable en [a, b], entonces lim
kgk es integrable en
[a, b], y se tiene
limk
ba
gk(t) dt =
ba
lim
kgk(t)
dt .
Un resultado analogo vale para series uniformemente convergentes de funciones integra-bles en un intervalo.
Teorema de PicardLindelof. Seaf : A [x0 a, x0 +a]Bb(y0) RRn Rn(con a > 0, b > 0) continua y lipschitziana con respecto a la segunda variable en elconjunto A. Entonces el problema de valor inicial (1.39)(1.40) tiene una solucionunica y(x) definida en el intervalo [x0 , x0 + ], siendo
= min(a, b/M)
y M el supremo de
f
en A.
Demostracion. (Notese, antes de empezar, que la existencia de M esta garantizada porser f continua en el conjunto compacto A.) La demostracion esta basada en un argu-mento muy sencillo de aproximaciones sucesivas (de Picard) a la solucion del problema(1.39)(1.40). Por sencillez, nos restringiremos al caso n = 1 (ecuacion escalar), en queA es un rectangulo cerrado
A = [x0 a, x0 + a] [y0 b, y0 + b]
y f(x, y) = |f(x, y)|.
-
7/30/2019 acuaciones difernciales 1
25/115
CAPITULO 1. INTRODUCCION 22
i) En primer lugar, podemos transformar el problema de valor inicial en una ecuacionintegral integrando la ecuacion diferencial entre x0 y x (con x [x0 a, x0 + a]),obteniendo
y(x) = y0 + x
x0 ft, y(t) dt . (1.53)
Mas precisamente, la funcion y(x) es solucion del problema de valor inicial (1.39)(1.40)si y solo si y(x) es una solucion continua de la ecuacion integral (1.53). (Ejercicio:pruebese esto en detalle.)
ii) A continuacion construimos recursivamente una familia de funciones yk : [x0, x0 +] [y0 b, y0 + b] (k = 0, 1, . . . ) diferenciables en el intervalo [x0 , x0 + ] de laforma siguiente. En primer lugar, definimos
y0(x) = y0 , x [x0 , x0 + ] .
A continuacion definimos
y1(x) = y0 +
xx0
f
t, y0
dt , x [x0 , x0 + ] .
La funcion y1 esta claramente definida y es diferenciable en [x0 , x0 + ] (por lacontinuidad de f en A). Ademas, se tiene
|y1(x) y0| x
x0
ft, y0 dt M|x x0| M b , x [x0 , x0 + ] .(1.54)
Procediendo recursivamente, supongamos que hemos definido las funciones diferenciables
y0, . . . , yk : [x0 , x0 + ] [y0 b, y0 + b]. Entonces se define
yk+1(x) = y0 +
xx0
f
t, yk(t)
dt , x [x0 , x0 + ] . (1.55)
Por hipotesis de induccion, yk es diferenciable en [x0 , x0 + ] e yk(t) [y0 b, y0 + b]para t [x0 , x0 + ]. Esto implica que f
t, yk(t)
es continua si t [x0 , x0 + ],
y por tanto (teorema fundamental del Calculo) yk+1 es diferenciable en [x0 , x0 + ].Utilizando de nuevo la hipotesis de induccion (yk(t) [y0 b, y0 + b]) se obtiene
|yk(x)
y0
| x
x0 ft, yk(t) dt M|x x0| M b , x [x0 , x0 + ] .iii) Probaremos a continuacion por induccion la importante desigualdad
|yk+1(x) yk(x)| M Lk |x x0|k+1(k + 1)!
, x [x0 , x0 + ] , k = 0, 1, . . . ,(1.56)
donde L > 0 es una constante de Lipschitz de f en A. En efecto, para k = 0 la de-sigualdad ya esta probada (vease (1.54)). Supuesta la desigualdad anterior cierta parak = 0, 1, . . . , m 1 con m 1, utilizando la hipotesis de induccion y la lipschitzianidad
-
7/30/2019 acuaciones difernciales 1
26/115
CAPITULO 1. INTRODUCCION 23
de f en la variable y obtenemos
|ym+1(x) ym(x)| =x
x0 f
t, ym(t)
f
t, ym1(t)
dt
x
x0
ft, ym(t) ft, ym1(t) dt L
x
x0
|ym(t) ym1(t)| dt L M Lm1m!
x
x0
|t x0|m dt
=M Lm
m!
x
x0
(t x0)m dt = M Lmm! |x x0|
m+1
(m + 1)
=M Lm |x x0|m+1
(m + 1)!.
Esto prueba la desigualdad (1.56) para k = m, completando as el proceso de induccion.
iv) Probemos a continuacion que la sucesion de funciones yk (k N) converge unifor-memente en [x0 , x0 + ] a una funcion continua y. En efecto, consideremos la serietelescopica
y0 +
k=0
[yk+1 yk] , (1.57)
cuya convergencia uniforme es equivalente a la de la sucesion de funciones yk (k N)(ejercicio). Utilizando la desigualdad (1.56) se obtiene
x [x0 , x0 + ] = |yk+1(x) yk(x)| M Lk k+1
(k + 1)!=
M
L
(L)k+1
(k + 1)!.
Como la serie numerica k=0
(L)k+1
(k + 1)!= eL 1
es convergente, la serie (1.57) y, por tanto, la sucesi on yk, converge uniformemente en[x0 , x0 + ] (criterio M de Weierstrass). Al ser las funciones yk continuas en elintervalo [x0 , x0 + ] y uniformemente convergentes a y en dicho intervalo, la funciony es continua en [x0 , x0 + ].v) Probaremos a continuacion que la funcion y(x) definida por
y(x) = limk
yk
(x) , x
[x0
, x0
+ ] . (1.58)
es solucion del problema de valor inicial. En efecto, pasando al lmite cuando k enla desigualdad |yk(x) y0| b se obtiene |y(x) y0| b, para todo x [x0 , x0 + ].La convergencia uniforme de la sucesion yk (k N) a la funcion y en [x0 , x0 + ]tambien garantiza que la sucesion de funciones gk : [x0 , x0 + ] R definida por
gk(t) = f
t, yk(t)
converge uniformemente a la funcion g(t) = f
t, y(t)
para t [x0 , x0 + ], ya que(aplicando de nuevo la lipschitzianidad de f)
|g(t) gk(t)| = ft, y(t) ft, yk(t) L |y(t) yk(t)|
-
7/30/2019 acuaciones difernciales 1
27/115
CAPITULO 1. INTRODUCCION 24
De esto se deduce que
limk
xx0
f
t, yk(t)
dt =
xx0
f
t, y(t)
dt .
Tomando por tanto el lmite cuando k en la igualdad (1.55) vemos que y es solucionde la ecuacion integral (1.53). Como y es continua en [x0 , x0 + ], esto implica que yes solucion del problema de valor inicial (1.39)(1.40). (Notese que el teorema de Peanogarantizaba la existencia de por lo menos una solucion de dicho problema.)
vi) Probemos, por ultimo, la unicidad. A tal efecto, supongamos que z : [x0, x0+] [y0 b, y0 + b] es solucion del problema de valor inicial (1.39)(1.40). Demostremos porinduccion que si yk (k N) es una de las funciones construidas anteriormente entoncesse tiene la importante desigualdad
|z(x)
yk(x)
| M Lk |x x0|k+1
(k + 1)!
,
x
[x0
, x0 + ] , k = 0, 1, 2, . . . . (1.59)
En efecto, la desigualdad es claramente cierta para k = 0, ya que al ser z solucion de laecuacion integral (1.53) se tiene:
|z(x) y0| =x
x0
f
t, z(t)
dt
M|x x0| .Supongamos la desigualdad cierta para k = 0, . . . , m 1 (con m 1). Entonces ladesigualdad para k = m se obtiene como obtuvimos (1.56) para k = m, sin mas quereemplazar ym+1 por z, ya que
z(x) ym(x) = xx0
ft, z(t) ft, ym1(t) dt .Esto prueba por induccion las desigualdades (1.59). Finalmente, tomando el lmite cuan-do k en (1.59) se obtiene
|z(x) y(x)| limk
M
L
(L |x x0|)k+1(k + 1)!
= 0 , x [x0 , x0 + ] ,
lo cual implica que z = y en [x0 , x0 + ]. (Recuerdese que para todo t R se tienelim
m tm/m! = 0.) Esto concluye la demostracion. Q.E.D.
Comentarios
Las funciones yk(x) (k N) construidas en la demostracion del teorema de PicardLindelof, cuyo lmite es la solucion y(x) del problema de valor inicial (1.39)(1.40), sedenominan aproximantes de Picard de la solucion y(x). De (1.59) con z = y se obtieneuna estimacion del error cometido al aproximar y(x) por su k-esimo aproximante:
y(x) yk(x) M Lk |x x0|k+1(k + 1)!
, x [x0 , x0 + ] , k = 0, 1, 2, . . . . (1.60)
Notese que, aunque para x fijo el miembro derecho tiende a cero cuando k , para kfijo la aproximacion (1.60) solo es buena si
|x
x0
|es suficientemente pequeno. Ademas,
el calculo del aproximante yk requiere calcular k integrales definidas. Esto hace que, en
-
7/30/2019 acuaciones difernciales 1
28/115
CAPITULO 1. INTRODUCCION 25
la practica, los aproximantes de Picard no tengan excesiva utilidad, aunque su valorteorico es indudable.
Ni la continuidad ni la lipschitzianidad de f son condiciones necesarias para la existen-cia o la unicidad de soluciones del problema de valor inicial (1.39)(1.40). Por ejemplo,la funcion
f(x, y) =
2 y
x+ 4 x , x = 0
0 , x = 0
es discontinua en el eje vertical x = 0. La solucion general de la ecuacion lineal y =f(x, y) se calcula facilmente, y es igual a
y(x) = x2 +c
x2.
Por tanto, el problema de valor inicial para la ecuaci on y = f(x, y) con la condicion
inicial y(0) = 0 tiene la solucion unica y(x) = x
2
. Notese, sin embargo, que si la condicioninicial es y(0) = y0 = 0 entonces el problema (1.39)(1.40) no tiene solucion, ya que launica solucion de la ecuacion diferencial definida en x = 0 es y(x) = x2.
En la practica, en lugar del teorema de PicardLindelof se aplican sus dos corolariossiguientes:
Proposicion 1.17. Si f : A IRn Rn (siendo I R un intervalo) es continua ylipschitziana respecto de la segunda variable en A, entonces para todo x0 I el problemade valor inicial (1.39)(1.40) tiene una solucion unica en el intervalo I.
Demostracion. Repasando la demostracion del teorema de PicardLindelof se observaque la restriccion
b/M solo es necesaria para asegurar que yk(x)
Bb(y0). Al
reemplazar Bb(y0) por Rn, esta condicion deja de ser necesaria. Q.E.D.
Proposicion 1.18. Si la funcion f : U Rn y sus derivadas parciales fiyj (1 i, j n) son continuas en el abierto U R Rn, entonces para todo (x0, y0) U elproblema de valor inicial (1.39)(1.40) tiene una solucion unica en un intervalo de la
forma
x0 , x0 +
, con > 0 (dependiente de (x0, y0)) suficientemente pequeno.
Demostracion. Basta tomar a,b > 0 lo suficientemente pequenos para que el compactoA = [x0 a, x0 + a] Bb(y0) este contenido en U. Al ser f continua y lipschitzianarespecto de la segunda variable A (por el comentario que sigue a la Proposicion 1.16),podemos aplicar el teorema de PicardLindelof a f en dicho conjunto. Q.E.D.
Corolario 1.19. Sif : U RRn Rn es de claseC1 en el abierto U, el problema devalor inicial (1.39)(1.40) tiene solucion unica local para todo dato inicial (x0, y0) U.Ejemplo 1.20. Hallemos los aproximantes de Picard para el problema
y = x y , y(0) = 1 , (1.61)
cuya solucion exacta esy(x) = ex
2/2 . (1.62)
En este caso la funcion f(x, y) = xy es C y lipschitziana respecto de la segunda variable
en todo JR para todo intervalo compacto J R, por lo que los aproximantes de Picard
-
7/30/2019 acuaciones difernciales 1
29/115
CAPITULO 1. INTRODUCCION 26
estan definidos (y convergen a la solucion) en todo R (ver los comentarios anteriores).Como y0 = 1 se tiene
y1
(x) = 1 + x
0t dt = 1 +
x2
2
y2(x) = 1 +
x0
t
1 +
t2
2
dt = 1 +
x2
2+
x4
8,
y, en general,
yk(x) =k
n=0
x2n
2n n!. (1.63)
En efecto, asumiendo esta formula cierta para k = 0, 1, . . . , m 1 (m 1) y aplicandola definicion de ym se obtiene
ym(x) = 1 +x
0t
m1n=0
t2n
2n n!dt = 1 +
m1n=0
x2n+2
2n (2n + 2) n!= 1 +
m1n=0
x2(n+1)
2n+1 (n + 1)!,
que es (1.63) con k = m. Esto prueba (1.63) por induccion.Notese que en este caso yk no es otra caso que el polinomio de Taylor de orden
2k de la solucion exacta. Esto, sin embargo, no es general; por ejemplo, considerese elproblema y = y2, y(0) = 1.
-
7/30/2019 acuaciones difernciales 1
30/115
Captulo 2
Ecuaciones y sistemas lineales
Un sistema lineal de primer orden es un sistema de n ecuaciones diferencialesordinarias en n funciones incognitas (y1, . . . , yn)
y de la forma
y = A(x) y + b(x) , (2.1)
donde b = (b1, . . . , bn) : R Rn es una funcion vectorial (el termino inhomogeneode la ecuacion (2.1)) y A : R Mn(R) es una funcion matricial. En otras palabras,para cada x
A(x) =
a11(x) . . . a1n(x)... . . . . . .
an1(x) . . . ann(x)
(2.2)
es una matriz n n con coeficientes reales aij (x) (1 i, j n). Si b 0 diremos que el
sistema (2.1) es homogeneo, e inhomogeneo en caso contrario.Nota: El conjunto Mn(R) es un espacio vectorial real de dimension n2. Una base de
dicho espacio es la formada por las matrices Eij (1 i, j n) cuyo unico elemento dematriz no nulo es un 1 en la posicion ij. En el espacio vectorial Mn(R) se suele definirla norma del supremo
A = max {A v : v = 1} , A Mn(R) ,en terminos de la cual
A w A w , w Rn .Un calculo sencillo muestra que si
v
= 1 entonces
Av
2
ni,j=1 a
2ij, por lo que
A n
i,j=1
a2ij
12
n max {|aij| : 1 i, j n} .
Notese, finalmente, que una funcion matricial A : R Mn(R) es continua en x R siy solo si sus n2 elementos de matriz aij : R R (1 i, j n) son funciones continuasen x.
Utilizando el teorema de PicardLindelof es inmediato probar el siguiente teoremade existencia y unicidadpara el problema de valor inicial asociado al sistema lineal (2.1):
Teorema 2.1. Si b : I Rn y A : I Rn son continuas en el intervalo I R,entonces para todo x0
I y para todo y0
Rn el problema de valor inicial (2.1) con la
condicion inicial y(x0) = y0 tiene una unica solucion en el intervalo I.
27
-
7/30/2019 acuaciones difernciales 1
31/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 28
Demostracion. Basta probar (por que?) la existencia y unicidad del problema planteadoen todo intervalo compacto J I. Por la Proposicion 1.17, es suficiente probar que lafuncion f : J Rn Rn definida por
f(x, y) = A(x) y + b(x)
es continua y lipschitziana respecto de la segunda variable en J Rn. La continuidadde f en J Rn es inmediata a partir de la de las funciones A y b en J I, ya que paratodo (x1, y1) J Rn se tiene
f(x2, y2) f(x1, y1) = A(x2)(y2 y1) +
A(x2) A(x1)
y1 + b(x2) b(x1) 0
si (x2, y2) (x1, y1). La lipschitzianidad de f respecto de la variable y es tambieninmediata de establecer, ya que si (x, y1), (x, y2) J Rn se tiene
f(x, y2)
f(x, y1)
=
A(x)(y2
y1)
A(x)
y2
y1)
nM
y2
y1
,
siM = max {|aij(x)| : 1 i, j n , x J} .
(La existencia de M se deduce de la continuidad de las n2 funciones aij en el compactoJ.) Q.E.D.
En particular, las soluciones de un sistema lineal (2.1) concoeficientes constantesestan definidas en toda la recta real.
2.1 Estructura del espacio de soluciones
Llamaremos espacio de soluciones del sistema lineal (2.1) al conjunto Sformado portodas sus soluciones, es decir
S= y : I R Rn y(x) = A(x) y + b(x) , x I C1(I) .(Ejercicio: justifquese esta ultima inclusion.) Una de las propiedades fundamentales delos sistemas lineales homogeneos
y = A(x) y , y Rn , (2.3)
es que si 1 y 2 son soluciones del sistema, entonces 1 + 2 es solucion para todo
, R, ya que(1+2)(x) = 1(x)+2(x) = A(x)1(x)+ A(x)2(x) = A(x)
1(x)+2(x)
.
En otras palabras:
Teorema 2.2. El espacio de soluciones de un sistema homogeneo es unespacio vectorialreal.
Para sistemas lineales inhomogeneos el resultado anterior admite una generalizacioninmediata. En efecto, si yp es una solucion particular fija del sistema e y es cualquiersolucion entonces y yp es solucion del sistema homogeneo (2.3) asociado a (2.1). Sillamamos
S0 al espacio de soluciones del sistema homogeneo (2.3) entonces y
yp
S0,
o equivalentemente y yp + S0. Recprocamente, si yH es cualquier solucion del sistema
-
7/30/2019 acuaciones difernciales 1
32/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 29
homogeneo (2.3) entonces yp + yH es claramente una solucion de (2.1). Esto prueba queel espacio de soluciones Sdel sistema (2.1) es el espacio afn
S= yp +
S0 . (2.4)
Hemos probado por tanto el siguiente
Teorema 2.3. El espacio de soluciones del sistema lineal inhomogeneo (2.1) es unespacio afn paralelo al espacio de soluciones del sistema homogeneo asociado.
Estudiemos a continuacion cual es la dimension del espacio de soluciones del sistemahomogeneo (2.3). Para ello, llamemos Yi(x) a la solucion del problema de valor inicial
Yi = A(x)Yi , Yi(x0) = ei ,
siendo x0
I un punto fijo pero arbitrario, y ei el i-esimo vector de la base canonica
de Rn (de hecho, para el razonamiento que sigue podramos tomar cualquier otra base).Sea ahora y(x) una solucion cualquiera del sistema lineal homogeneo, y llamemos
y0 = y(x0) (y01, . . . , y0n) =n
i=1
y0iei .
Entonces la funcion
y(x) =n
i=1
y0iYi(x)
es solucion del sistema (2.3) (por ser combinacion lineal de soluciones) y verifica la
condicion inicialy(x0) =
ni=1
y0iei = y0 = y(x0) .
Por el teorema de unicidad, y = y en I. En otras palabras, toda solucion del sistemahomogeneo (2.3) puede expresarse como una combinacion lineal
y =n
i=1
y0iYi
de las n soluciones Yi. Esto prueba, en particular, que
dim S0 n .
Para probar que, de hecho, la dimension del espacio de soluciones del sistema (2.3) esexactamente igual a n basta probar que las n soluciones Yi (1 i n) son linealmenteindependientes. Para ello, supongamos que existieran n constantes reales i (1 i n)tales que
ni=1
i Yi = 0 ,
es decirn
i=1
i
Yi(x) = 0 ,
x
I .
-
7/30/2019 acuaciones difernciales 1
33/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 30
En particular, haciendo x = x0 en la igualdad anterior obtenemos
0 =n
i=1i ei = 1 = = n = 0 ,
por la independencia lineal de los vectores de la base canonica. Hemos probado por tantoel siguiente resultado fundamental:
Teorema 2.4. El espacio de soluciones del sistema homogeneo y = A(x) y (cony : R Rn) es un espacio vectorial real de dimension n.
2.2 Wronskiano
Llamaremos sistema fundamental de soluciones del sistema homogeneo (2.3) a toda
base de su espacio de soluciones, es decir a todo conjunto de n soluciones linealmenteindependientes y1, . . . , yn. (Por ejemplo, las n soluciones Y1, . . . , Y n forman un sistemafundamental de soluciones.) Por definicion, toda solucion de (2.3) es una combinacionlineal de las soluciones y1, . . . , yn. En otras palabras, si y(x) es solucion de (2.3) entonces
y(x) =n
i=1
ci yi(x) , x I ,
para ciertas constantes reales c1, . . . , cn. Igualando la k-esima componente de ambosmiembros obtenemos las n igualdades escalares
yk(x) =n
i=1
yik(x) ci , 1 k n ,
equivalentes a la igualdad matricial
y(x) = Y(x)c (2.5)
con c = (c1 cn)t y
Y(x) = y1(x) y2(x) . . . yn(x)
y11(x) . . . yn1 (x)
.... . .
...
y1n(x) . . . ynn(x)
.
Recprocamente, es inmediato comprobar que si y(x) esta dada por (2.5) entonces essolucion del sistema homogeneo (2.3) cualquiera que sea el vector constante c Rn.Definicion 2.5. Una matriz fundamental del sistema (2.3) es cualquier funcion ma-tricial x Y(x) Mn(R) cuyas columnas forman un sistema fundamental de solucio-nes.
En general, dadas n soluciones 1, . . . , n del sistema homogeneo (2.3) (no necesa-riamente independientes), consideremos la matriz
(x) = 1(x) 2(x) . . . n(x)
-
7/30/2019 acuaciones difernciales 1
34/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 31
asociada a dichas soluciones. Notese que la matriz (x) es solucion de la ecuacion ma-tricial
(x) = A(x)(x) . (2.6)
En efecto, operando con matrices columna se tiene
(x) =
1 (x) 2 (x) . . . n (x)
=
A(x) 1(x) A(x)2(x) . . . A(x)n(x)
= A(x) (x) .
De la misma forma se demuestra que si la matriz n n (x) satisface la ecuacion (2.6)entonces cada una de las n columnas de es solucion del sistema (2.3).
Definicion 2.6. Llamaremos wronskiano de las soluciones 1, . . . , n al determinantede la matriz (x), es decir
W[1, . . . , n](x) = det (x) = 11(x) . . .
n1 (x)
... . . . ...1n(x) . . .
nn(x)
.Escribiremos a partir de ahora W(x) cuando quede claro del contexto a que solucionesi (1 i n) nos estamos refiriendo.
Si las soluciones k (1 k n) son linealmente dependientes (como funciones)entonces los vectores
1(x), . . . , n(x)
son linealmente dependientes en cada punto
x I, por lo que el determinante de la matriz (x) cuyas columnas son dichos vectoreses identicamente nulo. En otras palabras,
1, . . . , n linealmente dependientes = W[1, . . . , n](x) = 0 ,
x
I .
Recprocamente, si el wronskiano de las soluciones
1, . . . , n
se anula identicamenteentonces dichas soluciones son linealmente dependientes. De hecho, probaremos que siW(x0) = 0 para algun x0 I entonces las soluciones
1, . . . , n
son linealmente
independientes. En efecto, notese que la anulacion de W(x0) implica que los vectores
k(x0) , 1 k n .
son linealmente dependientes, es decir que existen constantes k (1 k n) tales quen
k=1 k k(x0) = 0 .
Pero entonces la funcion
y(x) =n
k=1
k k(x)
es solucion del sistema homogeneo (2.3) con dato inicial y(x0) = 0. Por la unicidad desoluciones de (2.3), de esto se deduce que y(x) = 0 para todo x I, lo cual prueba ladependencia lineal de las soluciones
1, . . . , n
. Hemos pues demostrado el siguiente
resultado fundamental:
1, . . . , n linealmente dependientes W[1, . . . , n](x) = 0 ,
x
I . (2.7)
-
7/30/2019 acuaciones difernciales 1
35/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 32
Si k (1 k n) son soluciones del sistema homogeneo (2.3), entonces o bienW(x) = 0 para todo x I, o bien W(x) = 0 para todo x I.
En efecto, si las soluciones son linealmente dependientes entonces su wronskiano seanula identicamente, mientras que si son indep endientes de la demostracion del resultado
anterior se deduce que el wronskiano no se puede anular en ningun punto.
Una funcion matricial : I Mn(R) es una matriz fundamental del sistema (2.3)si y solo si
i) (x) = A(x) (x), para todo x Iii) det(x) = 0, para todo x I.
Notese que la condicion ii) es equivalente a pedir que det (x0) = 0 para algun x0 I. Observese que si 1, . . . , n son funciones (diferenciables) arbitrarias la anulacionde su wronskiano en todos los puntos no implica la dependencia lineal. Por ejemplo, lasfunciones
1(x) = (sen x, x) , 2(x) = (x sen x, x2)
son linealmente independientes, aunque su wronskiano se anula para todo x R.Ejercicio. Son las funciones
1(x) = (1, x) , 2(x) = (x, 1 x2)solucion de algun sistema lineal homogeneo (con coeficientes continuos) en I = R?
Solucion. El wronskiano de las funciones
1, 2
es igual a
W(x) = 1 x
x 1 x2 = 1 2 x
2 .
Dicho wronskiano se anula en los puntos x = 1/2, y es distinto de cero en los demaspuntos. Como W ni es identicamente nulo ni tampoco es distinto de cero en R, lasfunciones dadas no pueden ser solucion de ningun sistema lineal homogeneo en R.
El wronskiano de 1 y 2 no se anula en los intervalos (, 1/2), (1/2, 1/2)y (1/
2, ), por lo que no esta descartado que dichas funciones puedan ser solucion de
algun sistema lineal homogeneo si nos restringimos a estos intervalos. De hecho, puedeprobarse que en dichos intervalos 1 y 2 son soluciones (linealmente independientes)del sistema homogeneo
y =1
1
2x2 x 1
1 + x2
3x y .
2.2.1 Formula de AbelLiouville
Sean, de nuevo, k(x) (1 k n) n soluciones del sistema homogeneo (2.3). Derivandosu wronskiano W(x) respecto de x obtenemos
W(x) =n
i=1
11(x) . . . n1 (x)
. . . . . . . . . . . . . . . . . . .1i
(x) . . . ni(x)
. . . . . . . . . . . . . . . . . . .1n(x) . . .
nn(x)
. (2.8)
-
7/30/2019 acuaciones difernciales 1
36/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 33
Dado que
ki(x) =
nj=1
aij(x) kj (x) , x I , 1 i, k n ,
la i-esima fila del i-esimo determinante en (2.8) es igual a
aii(x) i(x) +n
j=1j=i
aij(x) j (x)
(donde j denota la j-esima fila de ). De esto se sigue que el i-esimo determinante queaparece en (2.8) es igual a
aii(x) W(x) ,
puesto que un determinante no vara al anadir a una fila cualquier combinacion linealde las restantes. Obtenemos as la igualdad
W(x) = W(x)n
i=1
aii(x) tr A(x) W(x) .
Integrando esta ecuacion diferencial lineal ordinaria de primer orden en W(x) obtenemosla formula de AbelLiouville
W(x) = W(x0) e
xx0
tr A(t) dt, x I , (2.9)
donde x0 es un punto cualquiera de I. De esta formula se sigue inmediatamente elresultado sobre el wronskiano probado anteriormente (W(x) = 0 para todo x
I
o W(x) = 0 para todo x I).
2.2.2 Metodo de variacion de constantes de Lagrange
Los resultados de esta seccion se refieren al sistema homogeneo (2.3). Sin embargo, si seconoce una matriz fundamental de dicho sistema homogeneo podemos hallar la soluciongeneral del sistema inhomogeneo (2.1) aplicando el metodo de variacion de constantesde Lagrange. En efecto, la formula (2.5) para la solucion general del sistema homogeneosugiere expresar una solucion cualquiera del sistema inhomogeneo mediante
y(x) = Y(x)z(x) ,
siendo Y una matriz fundamental del sistema homogeneo y z : I Rn la nueva funcionincognita. Sustituyendo en (2.1) se obtiene
y = Y(x) z + Y(x) z = Y(x) z + A(x)Y(x) z = A(x)y + b(x) z = Y(x)1b(x) .
(Notese que Y(x) es invertible en cada punto, ya que su determinante es el wronskianode n soluciones linealmente independientes de la ecuacion homogenea (2.3), y por tantono se anula en ningun punto.) Integrando esta ecuacion entre x0 I y x obtenemos
z(x) =
x
x0
Y(t)1b(t) dt + c ,
-
7/30/2019 acuaciones difernciales 1
37/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 34
(con c Rn constante) de donde se obtiene la siguiente formula para la solucion generaldel sistema inhomogeneo (2.1):
y(x) = Y(x) c + Y(x) x
x0 Y(t)1
b(t) dt = Y(x) c + x
x0 Y(x)Y(t)1
b(t) dt . (2.10)
Notese que el primer termino (Y(x) c) es la solucion general del sistema homogeneoasociado, mientras que el termino restante proporciona una expresion explcita de unasolucion particular del sistema inhomogeneo en terminos de la matriz fundamental Y(x)y el termino inhomogeneo b(x).
2.3 Sistemas con coeficientes constantes
En general (a diferencia de lo que ocurre para una ecuaci on lineal escalar) no es po-sible dar un metodo general para hallar una matriz fundamental de un sistema linealhomogeneo en funcion de sus coeficientes. De hecho, solo en muy contados casos enque dichos coeficientes son funciones particularmente sencillas de x es posible calcularexplcitamente una matriz fundamental del sistema (2.3) (y, por variacion de constantes,obtener as la solucion general del sistema inhomogeneo (2.1)).
Un caso muy importante en que se puede calcular la matriz fundamental del sistemalineal (2.3) es aquel en que la matriz de coeficientes del sistema es constante. En otraspalabras, en este caso el sistema (2.3) adopta la forma sencilla
y = A y , A Mn(R) . (2.11)
Formalmente, la solucion de este sistema con la condicion inicial y(0) = y0 es
y = exA y0 .
Pero que sentido tiene la exponencial de la matriz xA en esta formula?Para responder a esta pregunta, recuerdese que para todo t R se define et como
la suma de la serie de potencias
et =
k=0
tk
k!.
Se demuestra que la serie anterior es absolutamente convergente para todo t R, siendola convergencia uniforme en cada intervalo compacto de la recta real. Guiados por loanterior, definamos
eB =
k=0
Bk
k!, B Mn(R) , (2.12)
donde B0 = 1 denota la matriz identidad. Para que la definicion tenga sentido, debemosprobar que la serie anterior converge en el espacio vectorial Mn(R) para toda matrizB Mn(R). Para probar este resultado, notese primero queBk Bk , k N ,puesto que si v Rn con v = 1 por definicion de la norma del supremo se tiene
Bkv B Bk1v B2 Bk2v Bk v = Bk .
-
7/30/2019 acuaciones difernciales 1
38/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 35
La convergencia (absoluta) de la serie (2.12) para toda matriz B Mn(R) se deducedel criterio de Cauchy. En efecto, si N > m se verifica
N
k=m+1
Bk
k! N
k=m+1
Bk
k! N
k=m+1
B
k
k! m,N 0 ,
en virtud de la convergencia de la serie numerica de eB. En particular, por lo queacabamos de demostrar la serie de potencias (con coeficientes matriciales)
exA =
k=0
xkAk
k!(2.13)
converge para todo x R, para cualquier matriz A Mn(R). Ademas, la convergenciade esta serie es uniforme en todo intervalo compacto por el criterio M de Weierstrass,ya que si x [a, b] se tienexkAkk!
|x|k Akk! (MA)kk! M = max(|a| , |b|) ,siendo la serie numerica
k=0
(MA)kk!
= eMA
convergente. Derivando termino a termino la serie (2.13) se obtiene la serie
k=1
k xk1Ak
k!=
k=1
xk1Ak
(k 1)! = A
k=0
xkAk
k!=
k=0
xkAk
k!
A .
Esta ultima serie es uniformemente convergente en todo intervalo compacto, por lo vistoanteriormente. Por tanto, en todo intervalo compacto de la recta real la funcion matricialexA es derivable, siendo su derivada la serie anterior. En definitiva, hemos probado laformula
d
dxexA = A exA = exAA , x R . (2.14)
Esta formula demuestra que las n columnas de la matriz exA son soluciones delsistema (2.11). Estas soluciones son linealmente independientes, ya que su wronskianoen x = 0 es igual a
det(e0) = det 1 = 1 = 0 .
Hemos probado por tanto el siguiente resultado:
Teorema 2.7. La matriz exA es una matriz fundamental del sistema homogeneo concoeficientes constantes y = A y.
En otras palabras, la solucion general del sistema (2.11) esta dada por
y(x) = exAc , (2.15)
con c Rn un vector constante. (Notese que, como ya sabamos por uno de los corolariosdel teorema de PicardLindelof, las soluciones de (2.11) estan definidas para todo x R.)En particular, dado que e0 es la matriz identidad, la solucion del problema de valor inicial
y = A y , y(0) = y0
-
7/30/2019 acuaciones difernciales 1
39/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 36
es simplemente
y(x) = exAy0 .
La funcion exponencial matricial verifica las siguientes propiedades:
i) e(s+t)A = esAetA , s, t R
ii) eA es invertible, siendo (eA)1 = eA
iii) Para toda matriz invertible P se tiene P eAP1 = eP AP1
En efecto, la primera propiedad se deduce (como para la funcion exponencial en R)manipulando adecuadamente la serie de e(s+t)A, lo cual es posible dado que esta serieconverge absolutamente. La segunda propiedad es consecuencia de la primera y de laidentidad e0 = 1. Por ultimo,
P eAP1 = P k=0
Ak
k!P1 =
k=0
P Ak
P1
k!=
k=0
(P AP1
)k
k!= eP AP1 .
En relacion con la propiedad i), notese que si A, B Mn(R) son dos matrices queconmutan, es decir satisfacen la igualdad
[A, B] AB BA = 0 ,entonces se puede probar que
eA+B = eA eB = eB eA .
Sin embargo, esta ultima igualdad no es cierta, en general, para matrices A y B arbi-
trariasPor lo dicho en la seccion anterior, la solucion general del problema de valor inicial
para el sistema homogeneoy = A x + b(x) (2.16)
es
y = exA c +
xx0
e(xt)A b(t) dt , (2.17)
con c Rn un vector constante. La solucion de (2.16) con la condicion inicial y(x0) = y0se calcula resolviendo la ecuacion matricial
y0 = ex0A c
c = ex0Ay0.
Utilizando la propiedad ii) se obtiene
y = e(xx0)Ay0 +x
x0
e(xt)A b(t) dt .
Ejercicio. Pruebese la formula det(eA) = etr A , valida para toda matriz A Mn(R).Solucion. Al ser las columnas de exA solucion del sistema lineal (2.11), det(exA) es elwronskiano de dichas soluciones. Aplicando la formula de AbelLiouville obtenemos
det(exA) = det(e0) eRx0 tr A dt = ex tr A .
Haciendo x = 1 se obtiene la formula propuesta.
-
7/30/2019 acuaciones difernciales 1
40/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 37
2.4 Calculo de la exponencial de una matriz
Estudiaremos en esta seccion algunos metodos practicos para calcular la exponencial deuna matriz. Por lo visto en la seccion anterior, esto nos permitira encontrar la solucion
general de un sistema homogeneo con coeficientes constantes va la formula (2.15) (o,mas generalmente, la solucion del sistema inhomogeneo (2.16) va la ecuacion (2.17)).
Recordemos, en primer lugar, que toda matriz A Mn(R) es semejante a una matrizdiagonal por bloques (en general con elementos de matriz complejos)
J = P1A P =
J1J2
. . .
Jm
,
donde cada bloque de Jordan Ji es de la forma
Ji = i 1 + Ni ,
siendo Ni una matriz nilpotente del tipo
Ni =
N[ni]N[ni]
. . .
N
n(si1)i
.
En esta formula ni ni n(si1)i , y N[k] Mk(R) denota la matriz nilpotenteelemental de orden k
N[k] =
01 0
1. . .. . .
. . .
1 0
.
De la igualdad
det(J t 1) = det(P1A P t 1) = det[P1(A t 1)P] = det(A t 1)se deduce que
det(A t 1) = (1 t)r1 (m t)rm ,
donde los enteros ri = ni +ni + +n(si1)i son las multiplicidades algebraicas de losautovalores i. Los m numeros distintos 1, . . . , m C, denominados los autovaloresde la matriz A, son por tanto las m races distintas de la ecuacion
pA(t) det(A t 1) = 0 .Al polinomio (de grado n) pA(t) se le denomina polinomio caracterstico de la matrizA.
La matriz N[k] es una matriz nilpotente de orden k, es decir N[k]j se anula si y solosi j k. De esto se deduce que las matrices Ni son matrices nilpotentes de orden ni (elndice del autovalor i), es decir
Nni1i = 0, Nnii = 0 , 1 i m . (2.18)
-
7/30/2019 acuaciones difernciales 1
41/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 38
A la matriz J Mn(C) (que es unica salvo por el orden de los bloques) se le llama laforma canonica de Jordan de la matriz A. Notese que N[1] = 0, y por tanto queJ es una matriz diagonal (cuyos elementos de matriz diagonales son los autovalores dela matriz A, repetidos tantas veces cuanta sea su multiplicidad algebraica) si y solo si
n1 = . . . nm = 1.El calculo de la exponencial de la matriz xA se reduce a la de xJ, ya que
exA = eP(xJ)P1
= P exJP1 .
(Notese que, aunque J y P pueden ser complejas, exA es real si A es real.) Para calcularla exponencial de xJ, observese que de las igualdades
Jk =
Jk1
Jk2. . .
Jkm
, k N ,
se deduce que
exJ =
exJ1
exJ2
. . .
exJm
.
El problema se reduce por tanto a calcular la exponencial de cada bloque xJi. Pero estoes inmediato, ya que al conmutar las matrices i1 y Ni se tiene
exJi
= exi1
exNi
= eix
exNi
.
Por ultimo, de la nilpotencia de Ni (ec. (2.18)) se deduce que la serie de exNi se reduce
a la suma finita
exNi =
ni1k=0
xk
k!Nki .
Notese que exNi se puede calcular por bloques mediante la formula
exNi =
exN[ni]
exN[ni]
. .
.exN
n(si1)i
, (2.19)
donde
exN[k] =
1x 1x2
2! x 1x3
3!x2
2! x 1...
.... . .
. . .. . .
xk1(k1)!
xk2(k2)! . . .
x2
2! x 1
. (2.20)
-
7/30/2019 acuaciones difernciales 1
42/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 39
En definitiva, la exponencial de la matriz xA Mn(R) esta dada por la siguienteformula:
exA = Pe1xexN1
e2xexN2
. . .
emxexNm
P1 ,donde exNi se calcula utilizando las ecuaciones (2.19) y (2.20).
Las columnas de la matriz P forman una base de Cn respecto de la cual la matrizdel operador lineal v A v adopta su forma canonica J (base de Jordan de A).Notese que la matriz PexJ (que es mas facil que calcular que exA = PexJP1, ya quepara su calculo no se necesita conocer la inversa de la matriz P) es tambien una matrizfundamental del sistema lineal homogeneo (2.11). En efecto, de las igualdades
PexJ ei = PexJP1 (P ei) = exA(P ei) , 1 i n ,se deduce que las columnas de PexJ son soluciones del sistema. Ademas, el wronskianode estas soluciones es no nulo, ya que
det
PexJ
= det P det exJ = 0 ,al ser P y exJ matrices invertibles. Sin embargo (a diferencia de exA, que es siemprereal si A es real) la matriz PexJ puede ser compleja, por lo que para obtener a partir deella una matriz fundamental real habra que tomar, en general, combinaciones linealesadecuadas de sus columnas.
Si es un autovalor de A y v un autovector correspondiente a este autovalor, exves una solucion del sistema (2.11), ya que
d
dx
exv
= ex(v) = ex(A v) = A
exv
.
Si R la solucion exv es real (pues el autovector v se puede tomar real). Si = a+ i bcon b = 0, al ser la matriz A real posee tambien el autovalor con autovector v. Sumandoy restando las dos soluciones exv y exv exv se obtienen las dos soluciones realesRe
exv
e Im
exv
, dadas respectivamente por
eax
cos(b x) Re v sen(b x) Im v , eax cos(b x) Im v + sen(b x) Re v . (2.21)Si A es diagonalizable entonces
J =
12
. . .
n
(donde ahora no suponemos que los numeros i son distintos dos a dos) y por tanto
PexJ = P1 P2 . . . P n
e1x
e2x
. . .
enx
= e1x P1 e
2x P2 . . . enx Pn .
-
7/30/2019 acuaciones difernciales 1
43/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 40
En otras palabras, si A es diagonalizable las funciones
eix Pi , 1 i n , (2.22)
donde i es un autovalor de A y Pi es un autovector correspondiente a este autovalor,son soluciones fundamentales del sistema homogeneo (2.11). Si alguno de los autovaloresi es complejo, por lo visto anteriormente podemos reemplazar las soluciones e
ix Pi yeix Pi por dos soluciones reales del tipo (2.21) (con a = Re i, b = Im i, v = Pi).
Sean ahora {Pl+1, . . . , P l+k} {v1, . . . , vk} los vectores de la base canonica de Cncorrespondientes a un bloque de Jordan elemental
1k + N[k] .
Entonces las columnas l + 1, . . . , l + k de la matriz PexJ estan dadas por
v1 . . . vk
exexN[k] = ex
v1 . . . vk
1
x 1x2
2! x 1x3
3!x2
2! x 1...
.... . .
. . .. . .
xk1(k1)!
xk2(k2)! . . .
x2
2! x 1
.
Por tanto las k funciones vectoriales
exj
i=0xi
i!vkj+i , 0 j k 1 , (2.23)
son soluciones del sistema homogeneo (2.11). Estas soluciones son todas reales si elautovalor R (ya que en una matriz real los autovectores propios generalizadoscorrespondientes a un autovalor real se pueden siempre escoger reales). Si el autovalor es complejo, al ser la matriz A real el complejo conjugado de es tambien autovalorde A. Se demuestra en el curso de Algebra Lineal que la matriz A tiene un bloque deJordan asociado a este autovalor de la forma
1k + N[k] ,
pudiendose tomar como vectores de la base canonica de Jordan asociados a este autovalor
los vectores {v1, . . . , vk}. Por tanto el sistema (2.11) posee en este caso junto con (2.23)las k solucionesex
ji=0
xi
i!vkj+i , 0 j k 1 (2.24)
complejas conjugadas de las anteriores. Si = a+ i b (con a, b R), sumando y restandolas soluciones (2.23) y (2.24) se obtienen las 2k soluciones reales
eaxj
i=0
xi
i!
cos(b x) Re vkj+i sen(b x) Im vkj+i
,
eax
ji=0
xi
i! cos(b x) Im vkj+i + sen(b x) Re vkj+i , 0 j k 1 .(2.25)
-
7/30/2019 acuaciones difernciales 1
44/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 41
Estas observaciones demuestran el siguiente teorema:
Teorema 2.8. Las soluciones del sistema homogeneo con coeficientes constantes y =A y (A Mn(R)) son combinaciones lineales (con coeficientes en Rn) de funcionesde la forma
xj eax cos(b x) , xk eax sen(b x) . (2.26)
En esta formula a + i b (con b 0) recorre todos los autovalores de la matriz A, y losexponentes j, k han de ser menores que el ndice del autovalor a + i b.
2.4.1 Polinomio interpolador de Lagrange
Uno de los metodos mas efectivos para el calculo de la exponencial de una matriz (o, engeneral, de una funcion matricial) es el basado en el polinomio interpolador de Lagrange,que describiremos a continuacion. El metodo es consecuencia del teorema de Cayley
Hamilton, segun el cualpA(A) = 0 , A Mn(R) .
Por definicion, el polinomio mnimo de la matriz A es el polinomio monico de gradomnimo A que anula a la matriz A, es decir tal que
A(A) = 0 . (2.27)
Se demuestra que tal polinomio es unico, y esta dado por
A(t) = (t 1)n1(t 2)n2 (t m)nm , (2.28)
siendo de nuevo ni el ndice del autovalor i de A. Es tambien facil probar que si P esun polinomio que anula a A entonces P es divisible por A.
Sea ahora f : R R una funcion analtica real definida por la serie de potencias
f(t) =
k=0
aktk , |t| < R ,
donde R > 0 es el radio de convergencia de la serie (R = en el caso de la exponencial).Igual que se hizo al principio de este captulo con la funcion exponencial, se demuestraque la serie matricial
f(X) =
k=0
akXk , X Mn(R) ,
es convergente si X < R. Para calcular f(A) para una matriz concreta A Mn(R)con A < R, observese que la igualdad (2.27) permite expresar cualquier potencia dela matriz A de exponente mayor o igual al grado
d(A) = n1 + + nmdel polinomio mnimo de A en terminos de potencias con exponentes menores que d(A).Esto demuestra que existe un polinomio Pf,A (dependiente de f y de A) de grado menoro igual que d(A)
1 tal que
f(A) = Pf,A(A) . (2.29)
-
7/30/2019 acuaciones difernciales 1
45/115
CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 42
Tal polinomio es unico, ya que si f(A) = Q(A) con deg Q d(A) 1 entonces Pf,A Qes un polinomio de grado menor o igual al del polinomio mnimo de A que anula a lamatriz A, y por tanto Pf,A Q = 0. Al polinomio Pf,A de grado d(A) 1 definido por(2.29) se le denomina el polinomio interpolador de Lagrange de la matriz A para la
funcion f. Para el calculo de Pf,A se suele utilizar en la practica el siguiente resultado:
Proposicion 2.9. El polinomio interpolador Pf,A esta unvocamente determinado porlas d(A) ecuaciones lineales en los coeficientes de Pf,A
P(k)f,A(i) = f
(k)(i) , 0 k ni 1 , i = 1, . . . , m , (2.30)
siendo ni el ndice d