2.1 TEORIA DE CONJUNTOS BORROSOS. TERMINOLOGIA....
24
1 DESCRIPCION ANALITICA DE LOS SISTEMAS BORROSOS 2.1 TEORIA DE CONJUNTOS BORROSOS. TERMINOLOGIA. En primer lugar introduciremos una serie de conceptos relativos a la teoría de conjuntos difusos que se manejarán frecuentemente en este documento. Definición 1 : Conjunto Borroso. Sea U una colección de elementos genéricamente denotados como {u} a la que llamamos universo de discurso. Sobre U definimos el conjunto difuso F caracterizado por su función de pertenencia μ F definida como [ ] 1 , 0 → U F : μ . Otra manera de ver un conjunto difuso es como un conjunto de pares de cada elemento genérico u con su grado de pertenencia : μ F u ( ) : } { U u u u F F ∈ = )) ( , ( μ La representación gráfica de un conjunto difuso podría ser la siguiente : U 0.5 1 u0 mu(u0)=0.579 Fig. 2.1. Conjunto difuso Al conjunto de elementos de U tales que su μ F u () > 0 se le denomina soporte del conjunto difuso. Obsérvese que un nº real se puede considerar como un conjunto difuso con un soporte de un solo elemento en U (en este caso los números reales) con μ F u ( ) =1. La altura de un conjunto difuso es el supremo de su función de pertenencia: alt F u u U F ( ) sup ( ) = ∈ μ OPERACIONES PRIMITIVAS ENTRE CONJUNTOS DIFUSOS Dados dos conjuntos difusos A y B definidos sobre el mismo U, con funciones de pertenencia respectivas μ A y μ B , se establecen una serie de operaciones primitivas entre ellos, cuyo resultado será otro conjunto difuso caracterizado por una nueva función de pertenencia en U. Las principales operaciones son la unión, la intersección y el complemento: Definición 2 : Unión. Se define la unión de los conjuntos difusos A y B para cada elemento u de U por la función de pertenecia : } { ) ( ), ( ) ( u u max u B A B A μ μ μ = ∪ Definición 3 : Intersección. Se define la intersección de los conjuntos difusos A y B para cada elemento u de U por la función de pertenecia : } { ) ( ), ( ) ( u u min u B A B A μ μ μ = ∩ Definición 4 : Complemento. Se define el complemento del conjunto difusos A para cada elemento u de U por la función de pertenecia : μ μ A A u u ( ) ( ) = - 1
Transcript of 2.1 TEORIA DE CONJUNTOS BORROSOS. TERMINOLOGIA....

1
DESCRIPCION ANALITICA DE LOS SISTEMAS BORROSOS
2.1 TEORIA DE CONJUNTOS BORROSOS. TERMINOLOGIA.
En primer lugar introduciremos una serie de conceptos relativos a la teoría de conjuntos difusos quese manejarán frecuentemente en este documento.
Definición 1 : Conjunto Borroso. Sea U una colección de elementos genéricamente denotados como{u} a la que llamamos universo de discurso. Sobre U definimos el conjunto difuso F caracterizadopor su función de pertenencia µ F definida como [ ]1,0→UF :µ . Otra manera de ver un conjuntodifuso es como un conjunto de pares de cada elemento genérico u con su grado de pertenencia :
µ F u( ) : }{ UuuuF F ∈= ))(,( µ
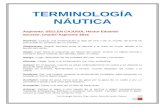
La representación gráfica de un conjunto difuso podría ser la siguiente :
U
0.5
1
u0
mu(u0)=0.579
Fig. 2.1. Conjunto difuso
Al conjunto de elementos de U tales que su µF u( ) > 0 se le denomina soporte del conjunto difuso.Obsérvese que un nº real se puede considerar como un conjunto difuso con un soporte de un soloelemento en U (en este caso los números reales) con µ F u( ) =1. La altura de un conjunto difuso es elsupremo de su función de pertenencia:
alt F uu U
F( ) sup ( )=∈
µ
OPERACIONES PRIMITIVAS ENTRE CONJUNTOS DIFUSOS
Dados dos conjuntos difusos A y B definidos sobre el mismo U, con funciones de pertenenciarespectivas µA y µB , se establecen una serie de operaciones primitivas entre ellos, cuyo resultado seráotro conjunto difuso caracterizado por una nueva función de pertenencia en U. Las principalesoperaciones son la unión, la intersección y el complemento:
Definición 2 : Unión. Se define la unión de los conjuntos difusos A y B para cada elemento u de Upor la función de pertenecia : }{ )(),()( uumaxu BABA µµµ =∪
Definición 3 : Intersección. Se define la intersección de los conjuntos difusos A y B para cadaelemento u de U por la función de pertenecia : }{ )(),()( uuminu BABA µµµ =∩
Definición 4 : Complemento. Se define el complemento del conjunto difusos A para cada elemento ude U por la función de pertenecia : µ µ
A Au u( ) ( )= −1

2
Estas tres definiciones están sujetas a discusión, y de hecho en la literatura aparece, por ejemplo, ladefinición µ µ µΑ Β Α Β∩ = ⋅( ) ( ) ( )u u u para la intersección. De hecho la elección de estas operacionessolo está restringida a una serie de condiciones de contorno que cumplen siempre las llamadas normas(o t-normas) y co-normas (o s-normas) tr iangulares que se definen en espacios métricosprobabilísticos. Estas son funciones definidas entre 01 01 01, , ,× → (los operadores MIN y MAX loson) que cumplen una serie de propiedades. Las más interesantes son:
Normas triangulares o t-normas (xty) :intersección u operador mínimo : min (x,y)producto algebraico : xyproducto acotado : max {0, x+y-1}
Co-normas triangulares o s-normas (xsy) :unión o máximo : max (x,y)suma algebraica : x + y - xysuma acotada : min {1, x+y}
Tenemos pues a nuestra disposición un gran número de posibles operadores entre conjuntosborrosos, de manera que se pueden escoger los que mejor se adapten a nuestro propósito concreto.Los comportamientos y las posibili dades o ámbitos de aplicación de cada tipo operador aún no hansido concluyentemente investigados. En lo sucesivo usaremos las definiciones dadas al principio porser las más usadas en la literatura de control, sobre todo porque los operadores MAX y MIN sonrobustos (en el sentido de que "gana" un valor y el otro no se usa) y fácilmente implementables, tantoen hardware como en software. Sin embargo en ciertas aplicaciones de interesa más el PRODUCTO,ya que su resultado es mezcla de los dos operandos y por tanto más "sensible" a la interacción entreambos.
PROPIEDADES DE LOS CONJUNTOS BORROSOS
Con las definiciones dadas hasta aquí se pueden comentar algunas características de los conjuntosdifusos :
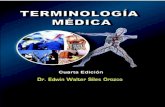
• Un conjunto clásico solo admite la pertenecia o la no pertenecia de un elemento u de U a él; encambio un conjunto difuso admite infinitos grados de pertenecia (consignados entre 0 y 1). Desdeeste punto de vista los conjuntos clásicos son un caso particular de los conjuntos difusos,caracterizados porque su función de pertenencia solo admite dos valores : 0 (no peretenencia) y 1(pertenencia). Un ejemplo típico para explicar esto es :
15 2520
Agua Templada Agua Templada
1
0
Fig. 2.2. Funciones de pertenencia clásica y difusa
˝
donde el primer gráfico corresponde a una definición clásica de un concepto, en este caso "aguatemplada". Se considera que el agua por debajo de 20 grados es templada, y en otro caso no; enotras palabras, dada una temperatura del agua podemos decir si está o no "templada" según nuestra

3
definición. El segundo gráfico se corresponde a una definición difusa del mismo concepto. Segúnesta definición, cualquier temperatura es "templada" en algún grado entre [0,1]. Así, 20 gradoscorresponde a un "agua templada" en grado 0.5. Obsérvese que la libertad conceptual para escogerla curva que representa la función de pertenencia permite manejar conceptos con definiciones nomuy claras (conceptos difusos), que son por cierto los que manejamos frecuentemente los humanosen nuestro razonamiento cotidiano. De esta manera, las matemáticas borrosas tratan de construiruna herramienta rigurosa y útil para manejar razonamientos con conceptos de esta índole.
• Los conjuntos difusos cumplen una serie de propiedades familiares a los conjuntos clásicos, comoson:
• Leyes de Morgan : A B A B
A B A B
∪ = ∩
∩ = ∪
• Distributivas : A B C A B A C
A B C A B A C
∪ ∩ = ∪ ∩ ∪∩ ∪ = ∩ ∪ ∩
( ) ( ) ( )
( ) ( ) ( )
• Leyes de Absorción : ( )
( )
A B A A
A B A A
∩ ∪ =∪ ∩ =
• Idempotencia : A A A
A A A
∪ =∩ =
• Conmutativa : A B B A
A B B A
∩ = ∩∪ = ∪
• Asociativa : ( ) ( )
( ) ( )
A B C A B C
A B C A B C
∩ ∩ = ∩ ∩∪ ∪ = ∪ ∪
• La ley de la exclusión no se cumple en conjuntos difusos : A A U
A A
∪ ≠
∩ ≠ ∅
que es la expresión matemática de la propiedad comentada antes de que un elemento puedapertenecer solo en parte a un conjunto, y por tanto pertenezca también en cierto grado a suopuesto. Es decir, un elemento puede a la vez ser y no ser algo; esta propiedad de la lógica difusa,que choca tanto con nuestro modo de razonar occidental engarza sin embargo con milenariossistemas orientales de pensamiento (taoismo, zen,...) en los que se admite la paradoja como unaherramienta más del conocimiento. Quizás esto haya contribuido a que, a pesar de que la teoría delos conjuntos borrosos viera la luz en USA, fuera en Japón donde se tomaron en serio lasposibili dades de dicha teoría, donde se hicieron las primeras aplicaciones y donde actualmente sedesarrolla la mayor actividad en este campo.
OPERACIONES COMPLEJAS ENTRE CONJUNTOS DIFUSOS
Sean A1,...,An conjuntos difusos definidos sobre los universos U1,...,Un respectivamente. Sedefinen también operaciones entre conjuntos definidos sobre universos de discurso diferentes, comoson:
Definición 5 : Producto Cartesiano. El producto cartesiano de A1,...,An es un conjunto difuso sobreU1x...xUn definido por la función de pertenencia :
}{ )(),...,(),...,,( 121... 11 nAAnAA uuminuuunn
µµµ =××
ó también : µ µ µ µA A n A A A nn n
u u u u u u1 1 21 2 1 2× × = ⋅ ⋅ ⋅... ( , ,..., ) ( ) ( ) ... ( )

4
Definición 6 : Relación Difusa. Una relación difusa de orden n es un conjunto difuso en U1x...xUn. Sepuede expresar :
}{ nnnRnUU UUuuuuuuRn
××∈=×× ...),...,(),...,(),,...,( 1111...1µ
Son de especial interés las relaciones difusas binarias, como se explicará más adelante. Dados porejemplo dos conjuntos difusos A y B definidos sobre los universos U y V respectivamente, definamosla relación difusa de orden 2 Rab de la siguiente manera:
}{))(),((),(
),(),(),,(
vuminvu
VUvuvuvuR
BAR
R
abVU
ab
ab
µµµµ
=
×∈=×
A esta relación concreta se la denomina del operador mínimo.En general habrá tantos tipos de relaciones binarias como maneras encontremos de relacionar dos
funciones de pertenencia (conjuntos borrosos). En el ejemplo anterior las hemos relacionado con eloperador mínimo; en general esta relación será del tipo : 0 1 0 1 0 1, , ,× → , es decir, hablamos denormas y co-normas triangulares.
Definición 7: Número difuso. Un número difuso F en un universo continuo U (por ejemplo la rectareal) es un conjunto difuso que es normal y convexo, es decir :
normal: 1)( =∈
umax FUu
µ
convexo : [ ]1,0,
))(),(())1((
21
2121
∈∈
≥−+
λ
µµλλµ
Uuu
uuminuu FFF
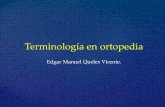
Definición 8 : Variable Linguística. Una variable linguística se puede ver como una variable cuyosposibles valores son números difusos. Por ejemplo, en el regulador de la lección anterior se definió lavariable linguística "Error" en un universo de discurso [-10,10], donde cada valor posible es una"partición" de dicho universo:
NB Negativo Grande NM Negativo Medio NS Negativo PequeñoZ CeroPS Positivo Pequeño PM Positivo Medio PB Positivo Grande
1
0.5
NB NM NS Z PS PM PB
-7.5 -5 -2.5 0 2.5 5 7.5
Fig. 2.3. Universo de discurso y conjuntos difusos que definen la var iable " Err or "
Definición 9 : Función de Implicación Difusa. Es una Relación Difusa (típicamente de orden 2) quetrata, por criterios intuitivos, de imitar el razonamiento humano del tipo regla de inferencia porimplicación, bien del tipo Modus Ponens :
Premisa 1 : x es A´

5
Premisa 2 : si (x es A) entonces (y es B)Conclusión : y es B´
bien del tipo Modus Tollens :
Premisa 1 : x es B´Premisa 2 : si (x es A) entonces (y es B)Conclusión : x es A´
donde los términos "x" e "y" son variables linguísticas. Dichos criterios intuitivos son del tipo :
Si "x es muy A", "y es muy A" Si "x es más o menos A", "y es más o menos B", etc.
Una relación difusa no podrá considerarse función de implicación difusa en la medida de que sealeje de cumplir estos criterios. La elección de una “correcta” función de implicación se basará encriterios intuitivos, con la única condición de que produzca consecuencias "correctas" (que cumplan elmodus ponens) a partir de premisas borrosas.
Este tipo especial de relación difusa entre dos conjuntos difusos A y B se denota A B→ . Suimportancia en que una regla de control del tipo SI...ENTONCES... se modeliza mediante funciones deimplicación difusas, que ponen en relación los antecedentes (señales de entrada medidas encaptadores) con la consecuencia (señal de salida deseada).
Algunas de las funciones de implicación más empleadas son:Operador mínimo [Mamdani] : ))(),((),( vuminvu BARC
µµµ =
Operador producto [Larsen] : )()(),( vuvu BARPµµµ ⋅=
Operador de Lukasiewicz : ))()(1,1(),( vuminvu BARaµµµ +−=
Maxmin [Zadeh] : { })(1)),(),((),( uvuminmaxvu ABARmµµµµ −=
Más adelante se considerará como afectan las diferencias en la función de implicación a laoperación del sistema borroso.
EL OPERADOR COMPOSICION
Una composición es una operación entre dos relaciones difusas (conjuntos difusos) definidos sobreuniversos de discurso relacionados. Definimos a continuación dos operadores de composicióninteresantes :
Definición 10 : Composición Sup-Star. Sean R y S relaciones difusas (por tanto conjuntos difusos) enUxV y en VxW respectivamente. La composición sup-star de R y S es una relación borrosa en UxWque se define por :
[{ ] }WwVvUuwvvuwuSR SRv
∈∈∈∗= ,,)),(),((sup,),( µµ�
Definición 11 : Composición Inf-Star. Sean R y S relaciones difusas (por tanto conjuntos difusos) enUxV y en VxW respectivamente. La composición inf-star de R y S es una relación borrosa en UxWque se define por :
[{ ] }WwVvUuwvvuwuSR SRv
∈∈∈∗=⊗ ,,)),(),((inf,),( µµ
En ambos casos el operador "star" * será cualquier función del tipo norma triangular.

6
2.2. APLICACIÓN DE LOS CONJUNTOS BORROSOS EN MODELADO DE SISTEMAS
En este apartado vamos a aplicar la terminología de conjuntos borrosos al sistema basado en reglasdiseñado en la lección anterior. Supongamos, por simplicidad, que el regulador funcionaba con dosreglas:
Regla 1 : Si (E es Z) y (D es PS) entonces (S es Z) ,también:Regla 2 : Si (E es PS) y (D es PM) entonces (S es PS)
en función del error (E) y de su derivada (D) se obtiene el valor de la señal de control (S) deseada.Obsérvese que en principio hay tres operadores relacionando conjuntos difusos: el y, el entonces y eltambién.
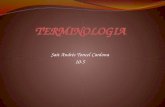
En el gráfico 2.4. se reproduce el funcionamiento del regulador en un instante determinado en quelas variables de entrada tienen ciertos valores (E=3.5 y D=3.0). La regla 1 produce un area y la regla 2otra, cuya superposición da un conjunto difuso de salida (sombreado). La estrategia dedesfuzzificación, consistente en hallar el centro de gravedad de dicho area, produce un valor concretode la señal de control.
Z PS PS PM Z PS
Z PS PS PM Z PS
E = 3.5 D = 3.0
Z PS
6.6-3.3min
Regla 1
Regla 2
A B C1 2A B C11 2 2
C
˝ Fig. 2.4. Estrategias de desfuzzyficación
Matemáticamente podemos expresar esta secuencia de operaciones de la siguiente manera:llamemos A,B y C a los conjuntos difusos de entrada de la variable 1, de la 2 y de salidarespectivamente. Normalmente A y B serán de tipo valor real (producto de los sensores), y C secorresponde con la zona sombreada de la figura anterior. La operación a realizar es : C A B R= ( , ) osiendo R una relación difusa del tipo función de implicación difusa, compuesta en nuestro caso porsolo dos reglas de control: { }21 , RRR = , donde cada regla de control será a su vez una función deimplicación difusa
iiii CBAR →= ),( .
El operador de composición "o" que usaremos corresponde al de la definición 10 del apartadoanterior, eligiendo para nuestro estudio el operador mínimo :
Composición Sup-Min : dadas E y R relaciones difusas (por tanto conjuntos difusos) en UxV y enVxW respectivamente,la composición sup-min de E y R es una relación borrosa en UxW que sedefine por :
[ ] WwVvUuwvvuminwuRE REv
∈∈∈= ,,)),(),,((sup),)(( µµ�
El regulador difuso produce un conjunto difuso C de posibili dades de acción de control a partir deconjuntos difusos de entrada de las variables a controlar A y B, y de las reglas de control R.Matemáticamente lo podemos expresar de la siguiente manera : RBAC �),(= . En nuestro casomodelaremos el operador también de la expresión { }21 , RRR = como la unión :

7
��2
1
),(=
=i
iRBAC
se puede demuestrar que con la elección de operadores SUP-MIN esa igualdad se reduce a:
)2),(()1),((),(2
1
RBARBAiRBACi
�����==
=
es decir, el efecto de aplicar varias reglas de control es igual a los efectos de aplicar cada una de ellaspor separado agregados con un operador (en este caso la unión u operador MAX).
Centrémonos en la expresión : iRBA �),( . También es un teorema el que, para los siguientespresupuestos:
1) Valores de entrada tipo valor real, A=E, B=D2) Operador mínimo (MIN) para modelizar la operación y entre conjuntos difusos3) Reglas de control modelizadas con la función de implicación de Mamdani o del mínimo
se obtiene :
))(,(),( wminiRBAiCi
wµα=� , donde ))(),(( DEmin
ii BAi µµα = .
Según la definición de unión de conjuntos difusos (def.2), queda finalmente:
)2),(()1),((),(2
1
RBARBAiRBACi
�����==
=
=
= [ ]))(,()),(,(21 21 wminwminmax CC µαµα
))(),((
))(),((
22
11
2
1
DEmin
DEmin
BA
BA
µµαµµα
=
=
que es la descripción matemática de las operaciones que realiza el sistem borroso explicado en lalección anterior y que se han representado gráficamente en la figura 2.4.
En resumen, las operaciones realizadas son :
1. Cada regla se interpreta como el producto cartesiano de los correspondientes conjuntos difusos))(),(),((),,( wvuminwvuR CBAj µµµ=
2. La inferencia se obtiene de aplicarle a cada regla la composición SUP-MIN con las entradasactuales: RBAC ),(=
3. Los resultados de todas las reglas se unen con la operación SUP.
Para reproducir este comportamiento hemos utili zado una serie de definiciones que, como tales,son susceptibles ser cuestionadas, a saber:
1) Modelado del "también" como unión de conjuntos difusos2) Modelado del "y" con el operador mínimo3) Modelado de la función de implicación difusa con el operador mínimo4) Elección de la regla de composición SUP-MIN
El efecto práctico de cambiar alguna de estas cuatro elecciones se puede comprobar en los ejemplossiguientes:
1) Modelado del "también" como intersección de conjuntos difusos (ver la Definición 3).
Suponiendo que el operador SUP-MIN sea conmutativo con la intersección (como lo es con launión), el funcionamiento del regulador vendría dado por :
)2),(()1),((),(2
1RBARBAiRBAC
����==

8
= [ ]))(,()),(,(21 21 wminwminmin CC µαµα
))(),((
))(),((
22
11
2
1
DEmin
DEmin
BA
BA
µµαµµα
=
=
y gráficamente :
Z PS PS PM Z PS
Z PS PS PM Z PS
E = 3.5 D = 3.0
Z PS
6.6-3.3min
Regla 1
Regla 2
A B C1 2A B C11 2 2
C
Fig. 2.5. Efecto de cambiar el operador linguistico también
Vemos que se produce un cambio solo en la determinación final del conjunto difuso de salida C,cambiando el criterio del MAX (unión) por el del MIN (intersección).
2) Modelado del "y" con el operador producto
La expresión matemática sería en este caso :
)2),(()1),((),(2
1
RBARBAiRBACi �
����==
=
=
= [ ]))(,()),(,(21 21 wminwminmax CC µαµα
siendod:)()(
)()(
22
11
2
1
DE
DE
BA
BA
µµαµµα
⋅=
⋅=
que gráficamente se refleja en:
Z PS PS PM Z PS
Z PS PS PM Z PS
E = 3.5 D = 3.0
Z PS
6.6-3.3prod
Regla 1
Regla 2
A B C1 2A B C11 2 2
C
Fig. 2.6. Efecto de cambiar el operador linguístico y
Cada regla "ataca" a la consecuencia con el producto de los antecedentes, y no con el mínimo.
3) Modelado de la función de implicación difusa con el operador producto de Larsen

9
En este caso las expresiones matemáticas quedan :
)2),(()1),((),(2
1
RBARBAiRBACi �
���
�==
=
=
= [ ])(),(21 21 wwmax CC µαµα ⋅⋅
))(),((
))(),((
22
11
2
1
DEmin
DEmin
BA
BA
µµαµµα
=
=
que gráficamente significa :
Z PS PS PM Z PS
Z PS PS PM Z PS
E = 3.5 D = 3.0
Z PS
6.6-3.3min
Regla 1
Regla 2
A B C1 2A B C11 2 2
C
Fig 2.7. Efecto de cambiar la función de implicación
En este caso ha variado la construcción de cada conjunto de salida Ci, es decir, que consecuenciase obtiene de las premisas. En efecto, era de esperar que diferentes modelos de "inferencia difusa"produzcan resultados también diferentes en la forma de la consecuencia obtenida.
4) Elección de la regla de composición SUP-PRODUCT
El operador de composición "o" usado (definición 7) fue la composición SUP-MIN. Eligiendo elahora operador producto quedaría una regla de composición :
Composición Sup-Prod : dadas E y R relaciones difusas (por tanto conjuntos difusos) en UxV yen VxW respectivamente,la composición sup-prod de E y R es una relación borrosa en UxWque se define por :
[ ] WwVvUuwvvuwuRE REv
∈∈∈⋅= ,,),(),(sup),)(( µµ�
Con los demás presupuestos que usamos para SUP-MIN se obtienen expresiones idénticas delregulador para las funciones de implicación de Mamdani y de Larsen. En cualquier caso se quierehacer notar que esta es una elección del diseñador, y que en principio está abierta a otros tipos dereglas de composición.
2.3. RELACIONES DIFUSAS DEL T IPO IMPLICACION

10
Una regla de control es una relación difusa entre antecedentes y consecuentes que son variableslinguísticas; esta relación se expresa con una función de implicación difusa (definiciones 5 y 6).Como ya se explicó, la elección del modelo que refleje una deducción con variables difusas se basa encriterios intuitivos, cuyo objetivo final es que la consecuencia sea lo más parecida posible a la tabla deverdad de la entrada. Dicho de otra manera: se trata de que en : RBAC �),(= con
iiii CBAR →= ),(
cuando las entradas sean justamente A=Ai y B=Bi, la consecuencia sea precisamente C=Ci . Existenmétodos para evaluar el ajuste a estos criterios de los diferentes modelos de implicación.
Se han utili zado no menos de 40 diferentes modelos de funciones de implicación difusa, que en generalse pueden clasificar en tres categorías:
1. Conjunción difusa : la conjunción difusa se define VvUu ∈∈∀ por:
BABA ×=→ = ),/()()( vuvu BA µµ ∗
siendo el operador * una norma triangular o t-norma.2. Disyunción difusa : la disyunción difusa se define VvUu ∈∈∀ por:
BABA ×=→ = ),/()()( vuvu BA µµ +
siendo el operador + una co-norma triangular o s-norma.3. Implicación difusa : la implicación se resume en cinco familias diferenciadas:
3.1. Implicación material : BABA +=→3.2. Cálculo proposicional : )( BAABA ∗+=→3.3. Cálculo proposicional extendido : BBABA +∗=→ )(
3.4. Generalización del Modus Ponens : [ ]{ }BcAcBA ≤∗∈=→ ,1,0sup
3.5. Generalización del Modus Tollens : [ ]{ }AtBtBA ≤+∈=→ ,1,0inf
A partir de estas definiciones, y según la norma, co-norma o combinación de ambas elegida, secompletan los modelos de funciones de implicación. Las más usadas en aplicaciones de control son:
• Operador mínimo [Mamdani] : usando la conjunción y la t-norma MIN :))(),((),( vuminvu BARC
µµµ =
• Operador producto [Larsen] : usando la conjunción y el PROD (producto algebraico) :)()(),( vuvu BARP
µµµ ⋅=
• Implicación de Lukasiewicz : con el modelo de implicación material y el operador de sumaacotada :
))()(1,1(),( vuminvu BARaµµµ +−=
• Maxmin [Zadeh] : con el modelo de cálculo proposicional y los operadores MAX y MIN :{ })(1)),(),((),( uvuminmaxvu ABARm
µµµµ −=
Todas estas funciones tienen una característica común que las hace muy útiles: permiten implementaruna inferencia con N antecedentes como N inferencias con solo un antecedente.

11
2.4. OPERADORES
Como ya se definió al principio de esta lección, un operador composición actúa sobre dos conjuntosborrosos definidos sobre universos de discurso relacionados. Definimos también dos operadores decomposición interesantes : composición Sup-Star y Inf-Star.
OPERADORES DE COMPOSICION
El operador Sup-Star se emplea frecuentemente para implementar la regla de inferencia, donde"star" puede ser un operador -p.e. mínimo, producto, etc.- que mejor se ajuste a una aplicaciónconcreta. Los cuatro operadores que se emplean son:
• sup-min [Zadeh, 1973]• sup-producto [Kaufmann, 1975]• sup-producto acotado [Mizumoto, 1981]• sup-producto drástico [Mizumoto, 1981]
En aplicaciones de FLCs los operadores más usados son los dos primeros, sobre todo por motivos desencill ez computacional. Sin embargo se ha sugerido que el uso de los otros operadores y sus posiblescombinaciones con diferentes tipos de funciones de implicación difusa dan mejores resultados enaplicaciones de tipo sistemas expertos o razonamiento aproximado.
OPERADORES DE CONEXION
Operadores de conexión son los encargados de materializar los operadores linguísticos y ytambién. Lo más usual es implementar la conexión "y" con un producto cartesiano (def. 5) entrevariables con diferentes universos de discurso. Por ejemplo, en una regla de control "Si ( A y B )entonces C " el antecedente se calcula como un conjunto difuso en el espacio producto UxV con lafunción de pertenencia dada por :
}{ )(),(),( vuminvu BABA µµµ =×
o bien :)()(),( vuvu BABA µµµ ⋅=×
donde U y V son los universos de discurso asociados con A y B respectivamente.
La conexión también ha de cumplir las propiedades de ser conmutativa y asociativa, ya que unsistema caracterizado por un conjunto de reglas de control ha de ser insensible al orden en que estas seapliquen. Toda vez que las normas y co-normas triangulares poseen dichas propiedades, son buenascandidatas para implementar esta operación. En general se emplean co-normas triangulares asociadasa Conjunciones y Disyunciones difusas, y normas asociadas a Implicaciones.
La simplicidad requerida en el aspecto computacional de las aplicaciones de control ha acabadoimponiendo los modelos de Mamdani y de Larsen junto con el operador unión (MAX) para laconexión "también".
2.5. METODOS DE INFERENCIA
La elección de todas las posibles variables de diseño del controlador difuso da un amplio abanico deposibili dades. El posible diferente modelado de los operadores linguísticos y, también, entonces; losdiferentes modelos de funciones de implicación; la subjetividad en la elección de la forma y tamaño departiciones difusas de los antecedentes y del los consecuentes; el método de desfuzzificación..., todo

12
ello da una gran número de diferentes y posibles combinaciones. Sin embargo, multitud de estudiosteóricos y de implementaciones prácticas han desembocado en una simplificación del panorama,dejándolo en unos pocos diferentes métodos de inferencia. Un método de inferencia es unmecanismo de obtención de la respuesta del sistema que incluye la elección de todas las variables antesmencionadas. Los tres mecanismos de inferencia más frecuentes son :
1) Método de inferencia 1Corresponde al regulador explicado en el primer capítulo. La compatibili dad de las entradas con lasparticiones difusas de entrada y la obtención de la consecuencia (funciones de implicación) serealizan con los operadores mínimo o producto. Los métodos de desfuzzyficación se explican másadelante. Su formulación se debe a Mamdani.
2) Método de inferencia 2Este método puede emplear cuando las funciones de pertenencia de las variables difusas de salidason monótonas. Entonces el peso de los antecedentes se recoge como antes (operadores mínimo oproducto), pero la consecuencia no será un conjunto difuso sino un valor puntual :
Z PS PS PM Z PS
Z PS PS PM Z PS
min
Regla 1
Regla 2
A B C1 2A B C11 2 2
y1
y2
Fig. 2.8: Método de Inferencia 2
En este mecanismo la desfuzzyficación es muy simple, y viene dada por la expresión:
21
22110
ωωωω
+⋅+⋅
=yy
Y
Fué propuesto por Tsukamoto.
3) Método de inferencia 3En este método los consecuentes vienen dados como funciones lineales de los consecuentes. Para elregulador de dos reglas que estamos estudiando sería :
Regla 1 : Si (E es Z) y (D es PS) entonces z=f1(E,D)Regla 2 : Si (E es PS) y (D es PM) entonces z=f2(E,D)
La desfuzzificación se hace simplemente con la expresión:
21
22110
),(),(
αααα
+⋅+⋅
=DEfDEf
z
El método se debe a Takagi y Sugeno.

13
2.6. REPRESENTACIÓN DE CONJUNTOS BORROSOS (DESFUZZIFICACION)
La desfuzzificación consiste en la obtención de un valor numérico a partir de un conjunto borroso.Es decir, se trata de elegir el número que mejor o más útilmente represente una determinadadistribución de posibili dad. No existe una metodología sistemática para hacer esta elección. Los tresmétodos usados actualmente son : método del máximo, método de la media de los máximos y métododel centro del area:
Z PS
6.6-3.3
C
MOMMAX COA
Fig. 2.9: Métodos de desfuzzyfucación
1. Método del máximo (MAX) : la salida viene dada por el primer punto en el que la distribución deposibili dad del control alcance su máximo valor.
2. Método de la Media de los Máximos (MOM) : la acción de control generada se corresponde alvalor medio de todas aquellas acciones de control cuya posibili dad sea máxima.
3. Método del Centro del Area (COA) : se escoge la correspondiente al centro de gravedad de ladistribución de posibili dades de la acción de control. Su expresión matemática es :
∫∫
⋅
⋅⋅=
dyy
dyyyYCoA
Y
Y
)(
)()(
0
0
0µ
µ
En aplicaciones es impracticable aplicar esta fórmula, por lo que se prefiere una versión discreta;para un número "q" de particiones se tiene :
∑
∑
=
=⋅
=q
iiY
q
iiYi
y
yy
YCoA
1
10
)(
)()(
0
0
µ
µ
Otra simplificación es el llamado Método de la Media Difusa (FM). Consiste en hacer el número departiciones "q" igual al número de conjuntos difusos que constituyen la salida "qy" (típicamente 5, 7etc.); se escoge como valor de cada cuantificación al valor que se obtiene de una desfuzzyficaciónCoA de los respectivos conjuntos difusos iniciales. De esta manera la expresión anterior quedaría:
∑
∑
=
=⋅
=y
y
q
ik
q
ikk y
YFM
1
10 )(
γ
γ

14
donde los términos kγ representan el grado de posibili dad con que se "ataca" al conjunto k (peso
de la regla), y los términos yk son el CoA de cada conjunto k inicial. Este método es pues muy sencill o de implementar, pero tiene dos efectos que pueden no serdeseables :
1. Ignora la forma de las funciones de pertenencia de la salida. Esto impide la posibili dad deenfatización de ciertas conclusiones sobre otras, que se consigue con las diferentes formasde los conjuntos difusos de salida.
2. La salida deja de ser difusa, y pasa a ser multinivel ,con tantos niveles como conjuntos desalida.
Para soslayarlos de alguna manera se usa, cuando deseamos enfatizar diferentes conclusiones, elMétodo de la Media Difusa Promediada (WFM), cuya expresión es:
∑
∑
=
=
⋅
⋅⋅=
y
y
q
ikk
q
ikkk y
YWFM
1
10 )(
γω
γω
siendo , por ejemplo : ∫ ⋅= dyykYk )(µω
de manera que se consigue el siguiente efecto :
WFMFM
Fig. 2.10 : Método de la media Difusa
Estos dos son los métodos de desfuzzificación más frecuentes debido a la simplicidad de cálculo.
La influencia de cada uno estos métodos en las prestaciones globales de un sistema borroso actuandocomo regulador se pueden resumir en:
• El método MOM puede producir problemas de insensibili dad del controlador a la forma delas funciones de pertenecia de las entradas, debido a que tiene un comportamientodiscontinuo. Bajo ciertas condiciones también puede presentar oscilaciones y dificultades paraanular el error en régimen permanente.
• El método CoA es el más adecuado, aunque es más simple y de comportamiento muy similarel método FM
• El método WFM sustituye al FM cuando se pretende enfatizar ciertas conclusiones sobreotras, es decir, cuando se trabaja con funciones de pertenencia de salida no simétricas.

DISEÑO INTUITIVO DE UN REGULADOR BASADO EN REGLAS
1.1 PLANTEAMIENTO GENERAL
En este apartado trataremos de diseñar un regulador para una cierto sistema, guiados únicamente pornuestro sentido común, y listo para ser utili zado programándolo en un ordenador. Por tanto seevitará en lo posible terminología especializada y se hará énfasis en aspectos puramente prácticos. Elregulador, al que denominaremos “controlador borroso” o FLC (acrónimo de Fuzzy LogicController), actuará sobre el sistema por realimentación, según el siguiente diagrama:
FLCplantaControlador
Borroso
Referencia
Variables de entrada
Señal de
Control
Fig. 1.1: Lazo de control a cerr ar
Del sistema a controlar o “planta” nos basta saber que tiene una variable que queremos dirigir, la cualsomos capaces de medir (varias veces por segundo) con un captador que proporciona tensiones entre–10 y +10 V. La referencia deseada tomará también valores en el mismo intervalo de [-10,10] V.Nuestro FLC actuará sobre la planta metiéndole continuamente una tensión comprendida tambiénentre [-10,10] V. Esta “señal de control” (o simplemente “control” ) la decidirá el FLC en función dedos datos: el valor del “Error” (la diferencia entre la salida de la planta y la referencia) y el valor de la“Derivada” (la diferencia entre el error actual y el error en en la captura anterior).
El FLC en sí constará de una serie de reglas que reflejarán nuestro “sentido común”, del tipo:
SI (el Error es Negativo Pequeño ) Y (la Derivada es Cero )ENTONCES (el Control será Positivo Pequeño),
o más brevemente :SI (Error es NS ) Y (Derivada es Z ) ENTONCES (Salida es PS )
donde hemos utili zado las siguientes etiquetas lingüísticas:
NB Negativo Grande NS Negativo PequeñoZ CeroPS Positivo Pequeño PB Positivo Grande
Nuestro trabajo de diseño consistirá en seleccionar tantas reglas de estas como sean necesarias paraque la planta siga la referencia de la mejor manera posible.

1.2 UNA PRIMERA ELECCION DE LAS REGLAS DE CONTROL
Supongamos que ponemos nuestro regulador, con unas ciertas reglas, en lazo cerrado con una plantacuya dinámica desconocemos. Consideraremos como respuesta deseada ante una referencia constantede 1V la que se representa en la Figura 1.2 siguiente:
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 2 4 6 8 10 12 14 16
Fig. 1.2: Respuesta deseada ante una referencia constante de valor 1 V.
Cómo ya dijimos, nuestro FLC actuará (=seleccionará el valor de la señal de control) en función dedos datos:
1. Error (E): diferencia entre la salida deseada (referencia) y la realmente obtenida.2. Derivada (d): diferencia entre el Error actual y el Error en la medición anterior. Este dato
está relacionado directamente con la pendiente de la señal de error (de ahí el nombre que lehemos dado), o lo que es lo mismo, a la pendiente de la salida real con signo cambiado(para referencias constantes).
Ahora razonaremos sobre la gráfica anterior que señales de control son necesarias para producir esarespuesta. Para ello dividiremos la respuesta en las zonas en las que cambian los valores de cada unade estas dos variables Error y Derivada (ver Figura 1.3).La estrategia de control se puede razonar sobre ese gráfico de la siguiente manera:
• En la zona (I) hay que mandar fuertes señales de control para acelerar el establecimiento, luego:Regla (I): Si (error es PB) y (derivada es PB) entonces (salida es PB)
• La zona (II) requiere rectificar la acción anterior, pero con más suavidad:Regla (II) : Si (error es NS) y (derivada es PM) entonces (salida es NM)

0 2 4 6 8 10 12 14 16
E >0 E <0 E <0 E >0 E >0 E <0 E <0 E >0 E!=0
d >0 d >0 d <0 d <0 d >0 d >0 d <0 d != 0 d!=0
(I) (II) (III) (IV) (V) (VI) (VII) (VIII) (IX)
˝Fig. 1.3: Elección de un banco de reglas para producir el comportamiento deseado
Y así sucesivamente:
Regla (III ): Si (error es NS) y (derivada es NM) entonces (salida es PS)Regla (IV): Si (error es PS) y (derivada es NS) entonces (salida es PM)Regla (V): Si (error es PS) y (derivada es PS) entonces (salida es PS)Regla (VI): Si (error es NS) y (derivada es Z) entonces (salida es NS)
De esta manera vamos determinando las reglas de control que determinan el comportamiento de laseñal de control en cada una de las situaciones reflejadas en la figura. Nótese que esta elección se hahecho razonadamente, pero no deja de ser subjetiva y otras opciones serían posibles.
1.3 IMPLEMENTACIÓN DEL FLC PROPUESTO
Cada una de las reglas de control anteriores trabaja con valores “linguísticos” de los datos: “grande”,“pequeño”, etc. La implementación se hará programando estas reglas en un PC con una tarjetaAD/DA. Pero nuestro captador lee números (entre –10 y 10) y nuestro actuador produce números(también entre –10 y 10). Necesitaremos, pues, incluir un mecanismo para traducir valores numéricosa valores “lingüísticos” (o “números borrosos”), y viceversa.
En total, nuestro FLC constará de tres partes (ver Figura 1.4):
1. El bloque FUZZYFICADOR convierte un número real (el valor de una variable de entrada) enun número borroso.
2. El bloque DECISOR usa las REGLAS DE CONTROL para obtener el valor deseable de lavariable de control en forma de nº borroso.
3. El DESFUZZYFICADOR convierte dicho nº borroso en un nº real que será el valor de laseñal de control que se manda a la planta.

Fuzzy-ficador
Decisorbasado en reglas
Desfuzzy-ficador
Variables de entrada
Vars. de entradaborrosas Vars. de control
borrosas
Var.
Controlde
Fig. 1.4: Componentes de nuestro controlador borr oso
1.4 EL FUZZYFICADOR
Este bloque convierte un nº real (usualmente proveniente de los sensores) en un vector de númerosreales que codifican un nº borroso. Para ello hay que elegir antes dos parámetros, que son:
1. Universo de discurso de las variables de entrada
2. Particiones borrosas y funciones de pertenencia
1. ELECCION DEL UNIVERSO DE DISCURSO DE LAS VARIABLES DE ENTRADA
Entendemos como Universo de Discurso el intervalo completo de valores que una variable puedetomar más típicamente. Por ejemplo, podemos suponer que una temperatura en una vivienda no sesaldrá del intervalo [-10 ºC, 40 ºC], o que las notas de un alumno no lo harán del [0,10], etc.Es usual escoger universos de discurso estandarizados, p.e. [-1,+1] y luego aplicar factores deescala para cada variable según la planta a controlar. En nuestro caso hemos supuesto que lasreferencias a seguir por la planta estarán comprendidas entre [-10,+10]:
1. El Error variará normalmente entre [-10,+10].2. La Derivada lo hace entre [-10,+10].
2. DISCRETIZACION DE LOS UNIVERSOS DE DISCURSO Y ELECCION DE LASPARTICIONES BORROSAS Y SUS FUNCIONES DE PERTENENCIAEl universo de discurso elegido se particiona como se ve en la Figura 1.5:
NB NS Z PS PB
-6.6 -3.3 0 3.3 6.6 10 -10
1
0.5
Fig 1.5 Elección de las particiones borr osas de [-10,10] para las entrada al regulador

Esta elección es idéntica para ambas variables de entrada, Error y Derivada. Hemosparticionado el universo de discurso de las variables de entrada en 5 conjuntos borrosos,definidos cada uno con funciones de pertenencia triangulares. A cada conjunto borroso leasociamos una etiqueta lingüística (ya mencionadas):
NB Negativo Grande NS Negativo PequeñoZ CeroPS Positivo Pequeño PB Positivo Grande
Así, se dice por ejemplo que 3.33 es "positivo pequeño" en grado "1", mientras que es "cero"con una posibili dad "0". En cambio el número 1.66 es "cero" en grado "0.5", y "positivopequeño" en grado "0.5". Más generalmente, podemos escribir :
NB NS Z PS PB3.33 = ( 0 0 0 1 0 )1.66 = ( 0 0 0.5 0.5 0 )
Así pues tenemos ya un método para obtener sistemáticamente la fuzzyficación. Nótese que el nºborroso (vector) en que se convirtió un valor real consta de 5 elementos debido a que hemosparticionado el universo de discurso en cinco conjuntos borrosos. Cada uno de esos elementos daidea del grado de ajuste de un valor concreto con cada una de las etiquetas lingüísticas: p.e. 3.33 seajusta muy bien a la definición de "Positivo Pequeño", mientras que es muy malo ajustándose al restode las etiquetas. Obsérvese también que este mecanismo es fácilmente programable.
1.5 EL DECISOR
El bloque llamado "Decisor" o "Motor de Inferencias" es donde se almacena el banco de reglas decontrol, con reglas de la forma: SI (Error es NS ) Y (Derivada es Z ) ENTONCES (Salida es PS).Para programarlo habrá que especificar dos cosas:
1. Definición de la variable borrosa de control.2. Definición del mecanismo de operación de todas las reglas simultáneamente.
1. PARTICION Y DEFINICION BORROSA DEL ESPACIO DE SALIDA
De manera análoga a como se hizo antes para el espacio de entrada, escogemos los siguientesconjuntos borrosos para la variable de control:
Fig. 1.6: Partición de la variable de control
1
0.5
NB NM NS Z PS PM PB
-7.5 -5 -2.5 0 2.5 5 7.5

A la luz de la Figura 1.6 se entiende que hemos escogido particionar el intervalo [-10,+10] en 7zonas, de forma triangular y con etiquetas lingüísticas:
NB Negativo Grande NM Negativo Medio NS Negativo PequeñoZ CeroPS Positivo Pequeño PM Positivo Medio PB Positivo Grande
2. MECANISMO DE OPERACIÓN DEL BANCO DE REGLAS DE CONTROLLas reglas de control son expresiones del siguiente tipo:
SI (Error es Z ) Y (Derivada es Z ) ENTONCES (Salida es Z )SI (Error es PS) Y (Derivada es PS) ENTONCES (Salida es PS)SI (Error es PS) Y (Derivada es PB) ENTONCES (Salida es PM)
Error, Derivada y Salida son las variables borrosas definidas anteriormente, y los valores quepueden tomar son los de las etiquetas lingüísticas definidas para cada variable. En principioguardaremos las reglas en una matriz de 5x5 siguiendo este esquema:
Error
Derivada
En la matriz se han situado las tres reglas anteriores. Se usarán pues un máximo de 5x5=25 reglas(producto de dos variables con cinco particiones cada una), aunque no sabemos cuántas seránnecesarias para conseguir un sistema de control aceptable.
La operación del regulador en cada periodo de muestreo será:
1. Captación de los dos datos de entrada a partir de los sensores2. Fuzzyficación : conversión de dos reales en dos vectores de 5 reales cada uno3. Operar la matriz de reglas con los 2 vectores de entrada, obteniendo como resultado un
vector de 7 elementos (el nº borroso de salida, o señal de control)
Los pasos 2 y 3 constituyen lo que se llama el Método de Inferencia, que se materializa en una seriede operaciones entre los vectores reales y la matriz de reglas. En la siguientes Figuras 1.7 y 1.8 seexplica uno de estos métodos de inferencia (denominado MIN-MAX).
Dados dos valores de entrada (E=3.5 y D=3.0) se aplican las dos primeras reglas de las enunciadasantes de la siguiente manera: a) se obtienen los valores de cada antecedente para las entradasmedidas; b) en cada regla se va a atacar al correspondiente consecuente con el MINIMO de dichosvalores (este mínimo se le llama peso de la regla correspondiente).

MIN
Z PS Z PS Z PS
Z PS PS PM Z PS
E = 3.5 D = 3.0
Regla 1
Regla 2
Fig. 1.7 : Obtención de los consecuentes de cada una de las reglas a partir de los datos˝
Realizando esta operación para las 25 reglas se obtienen 25 conjuntos borrosos; cogiendo elMAXIMO de todos ellos (Figura 1.8) se obtiene el valor borroso de la señal de control:
Z PS Z PS Z PS
Z PS PS PM Z PS
E = 3.5 D = 3.0
Z PS
0 6.6-3.3
Fig. 1.8: Obtención de la señal de control a partir de los antecedentes de todas las reglas˝
1.6 EL DESFUZZYFICADOR
Este bloque se encarga de convertir el conjunto borroso de salida en un un nº real, en nuestro casoentre [-10,+10]. Existen diferentes posibili dades para hacerlo; nosotros escogemos tomar como valorrepresentativo el centro del área del conjunto, que de manera simplificada se calcula con:
FM Yp y
p
k kk
q
ki
q( )0
1
1
=⋅
=
=
∑
∑siendo "q" el número de particiones difusas del espacio de salida, "Pk" el peso de cada regla, e "yk" elvalor del centro de áreas de cada partición difusa de salida de referencia (en nuestro regulador { -7.5-5 -2.5 0 2.5 5 7.5}, ver Fig. 1.6 ).

1.7 SIMULACIÓN POR ORDENADOR
Con los pasos explicados hasta aquí hemos definido un regulador basado en reglas y sin apoyarnos enherramientas de la teoría clásica de control. Además estos pasos son fácilmente implementables en unordenador. Aplicando dichos resultados a una planta piloto en simulación, el resultado obtenido serefleja en las Figuras 1.9 y 1.10 del final del capítulo; la planta piloto responde a la ecuación :
( )21
211
556.0470.11
029.0035.0−−
−−−
⋅+⋅−⋅+⋅=
zz
zzzG
como se ve es una sencill a planta lineal y estable, que tiene un offset en permanente. Se controlafácilmente con un PI clásico de parámetros K=1 y Ti =9, obteniéndose una respuesta rápida (sobre 20periodos de muestreo) y sin sobreoscilación, como refleja la Figura 1.9.
En la Figura 1.10 se presenta la respuesta ante las mismas referencias, con nuestro FLC y con elbanco de reglas siguiente.
Error
Derivada
El sistema se controla igualmente, esta vez con cierta sobreoscilación. La simulación muestra lavalidez del esquema propuesto.
Fig. 1.9 Respuesta de la planta ante escalones con el regulador PID discreto

Fig. 1.10 Respuesta de la planta ante escalones con el FLC propuesto
1.8 RECAPITULACION
Los reguladores basados en reglas encuentran su mayor aplicación sustituyendo a operarios querealicen el control manual de un proceso. Imaginemos, por ejemplo, a un equili brista que mantieneuna barra cilíndrica apoyada sobre un dedo de su mano, en posición vertical. Si no le es muy difícilmantenerla así durante algún tiempo, podremos calificarle como un "experto". Si le preguntamoscomo lo hace, nos podría dar indicaciones tales como:
SI la barra está muy inclinada a la derecha Y se cae rápido hacia la derechaENTONCES muevo rápido la mano hacia la izquierda
SI está casi vertical Y no tiende a caer hacia ningún ladoENTONCES no muevo la mano
De esta manera podríamos construir un conjunto de reglas del tipo:
SI (variable 1 es etiqueta A) Y (variable 2 es etiqueta B) ENTONCES (variable 3 es etiqueta C)
siendo "etiqueta" una variable linguistica del tipo"grande", "rápido", etc. Estos reguladores hanganado en popularidad por ser muy intuitivos. Lofti A. Zadeh inició esta corriente en 1965 con untrabajo titulado The fuzzy sets theory. El diseño basado en reglas puede ir más allá de la aproximaciónheurística aquí explicada, existiendo teorías y métodos de cálculo para:
1. Escoger la mejor partición de los universos de discurso.2. Escoger las forma de las funciones de pertenencia.3. Escoger el mecanismo de inferencia más adecuado al problema.4. Escoger el método de desfuzzificación más adecuado.5. Escoger las reglas de control mejores para el problema.
A estas y otras posibles cuestiones se da respuesta con la teoría del Control Fuzzy o Borroso.

1.9 TECNOLOGIA BASADA EN LOS SISTEMAS BORROSOS
Las técnicas basadas en reglas resultan ser alternativas óptimas para resolver algunos problemas deingeniería. Especialmente, el campo del control automático ha demostrado ser muy prometedor. Grannúmero de productos de consumo incorporan estos métodos, sobre todo de fabricantes japoneses.Algunos ejemplos son:
PRODUCTO COMPAÑIA FUNCION BORROSA REALIZADAControl deascensores
Fujitec / Toshiba Evaluación del tráfico de pasajeros para reducir tiemposde espera
Selector de palo degolf
Maruman Golf Selección del mejor palo de golf para unascaracterísticas físicas y un swing particular
Cámara de video Sanyo-Fisher/Canon
Determina el mejor enfoque y luminosidad cuando en laescena hay múltiples objetos
Lavadora Matsushita Determina la cantidad y calidad de la suciedad, cantidadde carga y tipo de ropa para ajustar el ciclo de lavado
Extractor Matsushita Ajusta la potencia del motor de vacío según lascondiciones de polvo en suspensión
Calentador deagua
Matsushita Ajuste según la temperatura y flujo de agua deseados
Aireacondicionado
Mitsubishi HeavyIndustries & TIL
Ajusta el nivel de operación óptimo para evitar ciclos deencendido-apagado, consumidores de energía
Televisión Sony Ajusta el brill o, color y contraste de la pantallaHandheld Sony Interpreta datos escritos a mano (sist. experto)Cambioautomático
Subaru Según el estilo de conducción y la carga del motorselecciona la mejor relación de transmisión
Gestión de stocks Yamaichi Securities Manager de stocks (sist. experto)Tabla 1.1 : Productos comerciales que incluyen aplicaciones de Lógica difusa
Otras aplicaciones incluyen productos de consumo como aspiradoras, hornos microondas,frigoríficos, alfombras eléctricas, ventiladores eléctricos, etc.
Existen gran número de productos de soporte o ayuda para el desarrollo de aplicaciones de controldifuso, principalmente software y microprocesadores. El software consiste en paquetes de CAD parael diseño de reguladores. El hardware son microprocesadores específicos para el procesamientofuzzy, que consiguen una gran velocidad de procesamiento. Todas las compañías importantes delsector disponen de productos de este tipo.
Entre las aplicaciones industriales donde los sistemas borrosos han servido de solución, destacanproblemas de control en la industria del automóvil (como la gestión automatica de la transmisión, elcontrol de velocidad óptima con criterios de seguridad/economía, el control del sistema desuspensión, o el control de la inyección al motor), en la siderurgia (control de hornos y trenes delaminado), el control de motores eléctricos, mezcladores de fluidos, sistemas hidro-neumáticos, etc.