20bcs-Mecanismos Tema 3 1 Engranajes
18
Engranajes Teoría de los Mecanismos 6 Comentario inicial Un problema no puede ser resuelto al mismo nivel de conciencia en que fue creado. Tenemos que aprender a ver el mundo de nuevo. Albert Einstein
-
Upload
fernando-romero-villalobos -
Category
Documents
-
view
31 -
download
2
Transcript of 20bcs-Mecanismos Tema 3 1 Engranajes

Engranajes
Teoría de los Mecanismos
6
Comentario inicial
Un problema no
puede ser resuelto
al mismo nivel de
conciencia en que
fue creado.
Tenemos que
aprender a ver el
mundo de nuevo.
Albert Einstein

Dpto. de Mecánica Aplicada
2
Los engranajes son un tipo de mecanismo de un amplísimo uso en la tecnología
moderna.
Su origen se remonta a tiempos indeterminados. Se mencionan artefactos que usaban
trasmisiones semejantes a los engranajes en la antigua China y el Medio oriente, pero
no hay datos de los mismos.
La evidencia mas antigua es el mecanismo de Anticitera, 87 BC. Descubierto en un
naufragio en Creta

Dpto. de Mecánica Aplicada
3
Da Vinci dejo varias muestras de diferentes tipos de engranajes, y aplicaciones de los
mismos.
Los trabajos de Euler incidieron en el desarrollo de la teoría de los engranajes. En los
siglos XIX y XX se tienen los avances fundamentales gracias a las escuelas alemana y
rusa, y aportes de científicos de EU y Francia.

Dpto. de Mecánica Aplicada
4
Las trasmisiones por engranajes se emplean para trasmitir y transformar el
movimiento rotatorio de un árbol hacia otro árbol. En el proceso de
trasmisión se pueden obtener variaciones de velocidades y torques a la
salida con respecto a la entrada.
Se distinguen por ser muy compactos, tener una buena relación potencia
trasmitida contra peso, volumen, etc.
Pueden trasmitir cargas con relación de trasmisión constante.
Es posible lograr precisiones adecuadas para una gran cantidad de
situaciones prácticas con facilidad.
Por otro lado para su fabricación se necesitan herramientas especiales.
Cuando trabajan a altas velocidades pueden producir ruido y vibraciones.
¿De qué otra forma se puede trasmitir y transformar el movimiento rotatorio?

Dpto. de Mecánica Aplicada
5
Hay varias formas de clasificar a los engranajes. La mas usada es de acuerdo a la
posición relativa de los ejes de las ruedas.
Ejes paralelos:
engranaje cilíndrico
Ejes cruzados:
engranaje
hiperbólico
Ejes que se
cortan: engranaje
cónico

Dpto. de Mecánica Aplicada
6
Los mas extendidos son los engranajes cilíndricos, llamados así porque es posible
sustituir las ruedas dentadas por cilindros que transforman el movimiento en la misma
razón y que trasmiten por fricción. Estos cilindros se llaman cilindros primitivos.
árboles paralelos,
relaciones de transmisión de hasta u=8 (en casos extremos
hasta 20), en transmisiones de 2 etapas hasta 45 (en caso
extremo hasta 60) y en transmisiones de 3 etapas hasta 200
(en caso extremo hasta 300).
potencia hasta P=25000 CV, n1=100000 rpm, velocidades
tangenciales de hasta v=200 m/s.
rendimiento en cada etapa del =96-99%, según la ejecución y
el tamaño.

Dpto. de Mecánica Aplicada
7
El engranaje es la combinación de dos ruedas dentadas.
La distancia a la que se encuentran los ejes de las ruedas se denomina distancia entre
centros o interaxial aω, da una idea del tamaño de la trasmisión.
La trasmisión del movimiento se describe por la relación de trasmisión, que se define
como:
1
2
2
1
2
112
z
z
n
nu
La rueda 1 (piñón) es la de entrada del movimiento, la 2 es la
de salida, z1 y z2 son los números de dientes de piñón y rueda.
En ese caso u > 1.
1 y 2 son contrarias en el engranaje exterior.
Esta relación de trasmisión debe ser constante. Se demuestra
además que los torques aplicados se relacionan por:
aω
ω2
ω1
1
212
M
Mu
M1
M2

Dpto. de Mecánica Aplicada
8
Para que dos ruedas dentadas engranadas trasmitan el movimiento con una relación de
trasmisión constante, la forma lateral del diente no puede ser cualquiera.
A esta forma se le llama perfil del diente, y se define por un tipo de curva específico.
Se definen también:
Cresta o cabeza del diente
Cara o flanco
Fondo del diente
Ancho del diente
Espesor del diente
Ancho del entre-diente
Altura del diente
Circunferenci
a de
referencia

Dpto. de Mecánica Aplicada
9
La curva seleccionada debe cumplir el teorema fundamental del engranaje, que
establece que:
(Para que dos ruedas dentadas engranadas trasmitan el movimiento con una relación
de trasmisión constante)
“El perfil de los dientes debe ser tal que la normal común a ambos dientes en el punto
de contacto divida a la línea de centros en dos partes inversamente proporcionales a la
relación de trasmisión.”
Si bien un gran número de curvas cumpliría esta condición solo un reducido número
tiene aplicación práctica.
Entre ellas están la cicloide y la evolvente.
Esta última es la mejor para admitir pequeños errores en la distancia interaxial.
Es la mas usada en la fabricación de engranajes.
Dpto. de Mecánica Aplicada
10
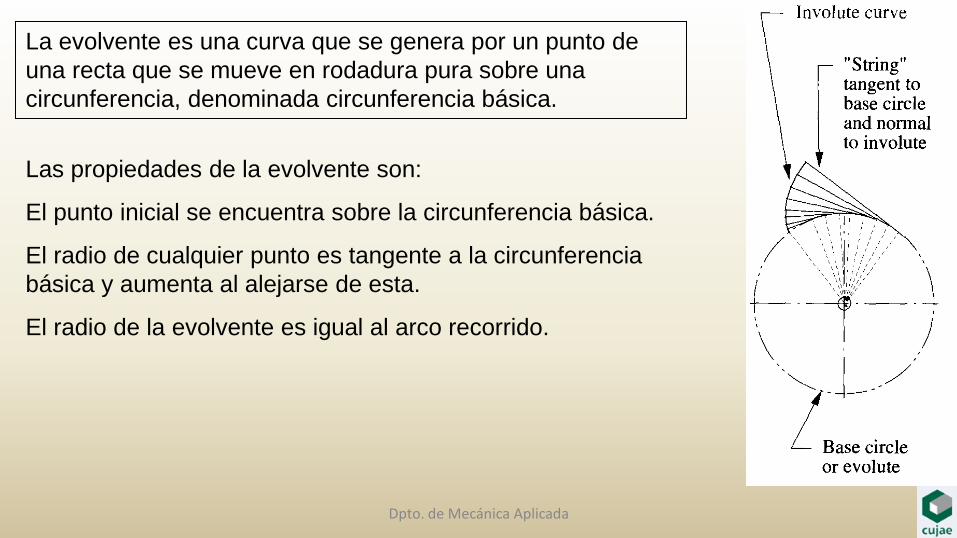
La evolvente es una curva que se genera por un punto de
una recta que se mueve en rodadura pura sobre una
circunferencia, denominada circunferencia básica.
Las propiedades de la evolvente son:
El punto inicial se encuentra sobre la circunferencia básica.
El radio de cualquier punto es tangente a la circunferencia
básica y aumenta al alejarse de esta.
El radio de la evolvente es igual al arco recorrido.

Dpto. de Mecánica Aplicada
11
En la figura se tiene:
)(
tan
yyb
yb
rmt
ryt
ytmt
Entonces:
yyy
ybyyb rr
tan
tan)(
A la variable y se le asigna el tratamiento de función trigonométrica y se denomina
función involuta de , inv . Se encuentra tabulada en manuales especiales y tiene una
gran importancia en la geometría del engranaje de evolvente.
El valor de y se introduce en radianes en la expresión.
es el ángulo de presión.

α
nn VV 21
1
212.
w
w
d
di
222111 tOtO.
2.
1.
1
2
11
22
wO
wO
tO
tO

Dpto. de Mecánica Aplicada
13
Los engranajes fabricados con perfil de evolvente tienen las siguientes características:
Toleran pequeñas variaciones en la distancia axial respecto a la teórica, debidas a
errores de fabricación o montaje.
Las herramientas para el maquinado de los dientes se pueden producir y afilar a partir
de movimientos y bordes cortantes rectilíneos.
Los perfiles de los dientes ruedan con cierto deslizamiento transversal. Sólo están en
rodadura pura en el polo del engranaje.
Los radios de curvatura de los perfiles son pequeños. Por ello los flancos de los dientes
sufren considerables tensiones de contacto que tienden a su destrucción.
(observar la rueda dentada que está a la entrada del taller de la facultad)

Dpto. de Mecánica Aplicada
14
La rueda con dientes de perfil de evolvente tiene el siguiente aspecto:

Dpto. de Mecánica Aplicada
15
Un parámetro de gran importancia de las ruedas dentadas es el paso.
Se define el paso p como la distancia entre puntos homónimos de dientes consecutivos.
El valor del paso p depende de la circunferencia en que se mida.
Dpto. de Mecánica Aplicada
16
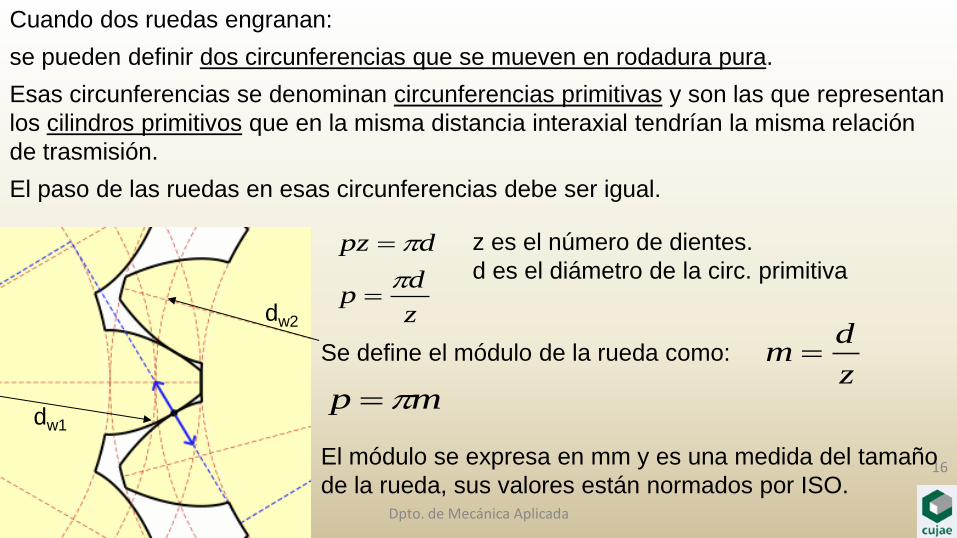
Cuando dos ruedas engranan:
se pueden definir dos circunferencias que se mueven en rodadura pura.
Esas circunferencias se denominan circunferencias primitivas y son las que representan
los cilindros primitivos que en la misma distancia interaxial tendrían la misma relación
de trasmisión.
El paso de las ruedas en esas circunferencias debe ser igual.
dw2
dw1
z
dp
dpz
z es el número de dientes.
d es el diámetro de la circ. primitiva
Se define el módulo de la rueda como: z
dm
mp
El módulo se expresa en mm y es una medida del tamaño
de la rueda, sus valores están normados por ISO.
Dpto. de Mecánica Aplicada
17
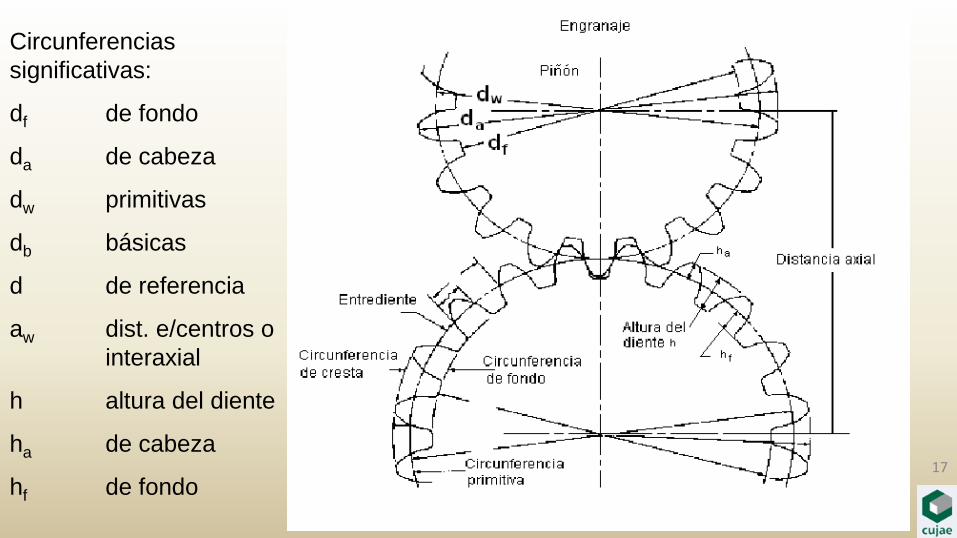
Circunferencias
significativas:
df de fondo
da de cabeza
dw primitivas
db básicas
d de referencia
aw dist. e/centros o
interaxial
h altura del diente
ha de cabeza
hf de fondo

Dpto. de Mecánica Aplicada
18
I serie 1 1.25 1.5 2 2.5 3 4
II serie 1.125 1.375 1.75 2.25 2.75 3.5 4.5
I serie 5 6 8 10 12 16 20
II serie 5.5 7 9 11 14 18 22
Muestra de valores de módulos normados
En EU, Inglaterra y algunos otros países se emplea el diametral pitch, definido como:
d
zpd
Se expresaría como número de dientes por pulgada. Sus
unidades son pulg-1.
Se relaciona con el módulo por:
dpm
4,25 Las ruedas de un sistema no son intercambiables con las del
otro.