
1. El autómata programable: ciclo de funcionamiento ...€¦ · 1 1. El autómata programable:...
35
1 1. El autómata programable: ciclo de funcionamiento, cableado y software de programación Autómata o PLC: equipo electrónico de control con hardware independiente de la aplicación (habitualmente flexible), capacidad de conexión directa a las señales de campo y programable por el usuario. bus interno entradas salidas Memoria de programa Fuente de alimentación adas das Mi d bus interno Interfaz e Interfaz CPU Memoria imagen e/s Memoria de datos entra salid Micro procesador 1 Basado en microprocesador + programa (ejecución secuencial) PROGRAMA MICRO-P grifo mano vista Nivel agua Nivel agua en vaso 2
Transcript of 1. El autómata programable: ciclo de funcionamiento ...€¦ · 1 1. El autómata programable:...

1
1. El autómata programable: ciclo de funcionamiento, cableado y software de
programaciónAutómata o PLC: equipo electrónico de control con hardware
independiente de la aplicación (habitualmente flexible), capacidad p p ( ), pde conexión directa a las señales de campo y programable por el usuario.
bus internoentra
das
salid
as
Memoria de programa
Fuente de alimentación
adas
das
Mi dbus interno
Inte
rfaz
e
Inte
rfaz
CPU Memoria imagen e/s
Memoria de datos
entra
salidMicro procesador
1
Basado en microprocesador + programa (ejecución secuencial)
PROGRAMAMICRO-P
grifo
mano
vistaNivel aguaNivel aguaen vaso
2

2
Basado en microprocesador + programa
Funcionamiento cíclico
PROGRAMA
If h < max,
Then
Grifo:=1,
Else
Grifo:=0,
MICRO-P
grifo
Ni l Grifo: 0,
endNivel aguaen vaso
3
Si t AUTÓMATAEntradas( )Sistema a
controlarAUTÓMATA
PROGRAMA
(sensores)
Salidas(actuadores)
Nivel aguaen vaso
vista
grifo
4

3
Ciclo de funcionamiento del autómata programable
tensiónComprobación hardware
Borrado de variables internas
INICIALIZACIÓN
Borrado de variables internas
Puesta a cero del “watchdog”
Comprobación conexiones y memoria
Correcto?NO
CICLO “SCAN”
5
Lectura interfaz entrada
Ejecución programa
escritura interfaz salida
Servicio periféricos
error
Conexiones
Los autómatas que tenemos tienen entradas de CC de 24 V y salidas a relé.
Salidas a relé
COM común salidas
Q0 salida ceromicro
Bobina relé
Contactosrelé
Salidas a relé•Aisladas eléctricamente•robustas•lentas
Al activarse por programa la salida cero se activa el relé y se cierran los contactos
6

4
Salidas estáticas o a colector abierto
Diodo LED( i l i t
•No sisladas éléctricamente•frágiles•rápidas
COM común salidas
Q0 salida ceromicro
transistor
(aislamiento óptico)
•rápidas
Transistorsalida
Al activarse por programa la variable salida cero se activa eltransistor y el diodo led que activa el transistor de salida y se cierraentre E0 y COM.
Sea como sea la salida, lo que tengo son dos contactos que pueden estardesconectados o conectados, a ellos conecto mis elementos (motor, bobina,robot….), yo debo proporcionar la fuente de alimentación. 7
Entradas, de corriente continua
COM común entradas
I0 entrada ceromicro
Al hacer pasar corriente entre I0 y COM se activa el diodo que activa el transistor interno y cambia el estado de la variable “entrada0” en el micro.
8

5
• Práctica 1: alimentación de entradas y salidas
COM ( )
I0
microI1I2
COM (-)
Q0
Q1Q2
24 Vcc24 Vcc
Tengo que añadir fuentes de corriente 24Vcc para activar entradas y salidas. Los autómatas disponen de fuentes que pueden usarse para ello (sólo para salidas de baja potencia)
COM (-) ( )
9
• Abrir icono CX-programmer (Omron-Cx-One)• Archivo nuevo
Software de programación
Tipo de dispositivoCP1L
10
Tipo de CPU L

6
• Autómatas CPM2, CPM2A
Tipo de dispositivoTipo de dispositivoCPM2*
11
Autómatas CPM1
Tipo de dispositivoCPM 1
Número de puntos 10, 20 30 (número de entradas y salidas)
12
entradas y salidas)
7
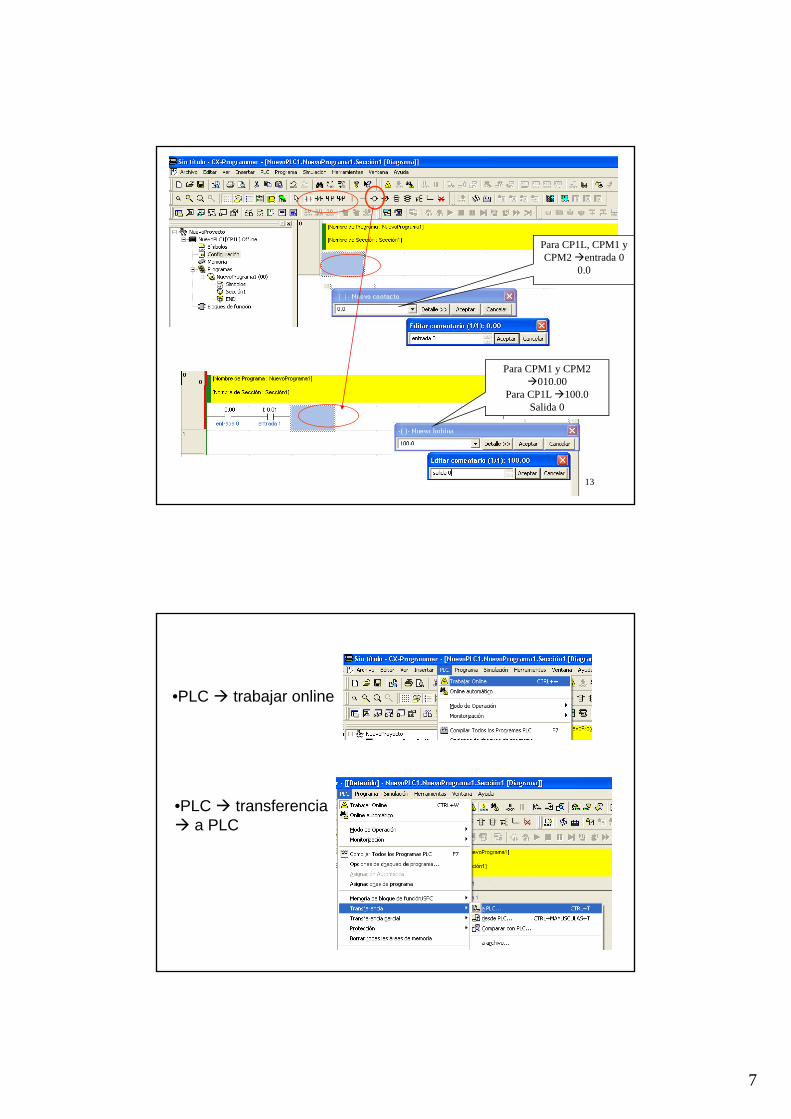
Para CP1L, CPM1 y CPM2 entrada 0
0.0
Para CPM1 y CPM2 010.00
13
Para CP1L 100.0Salida 0
•PLC trabajar online
•PLC transferenciaa PLC
14
8
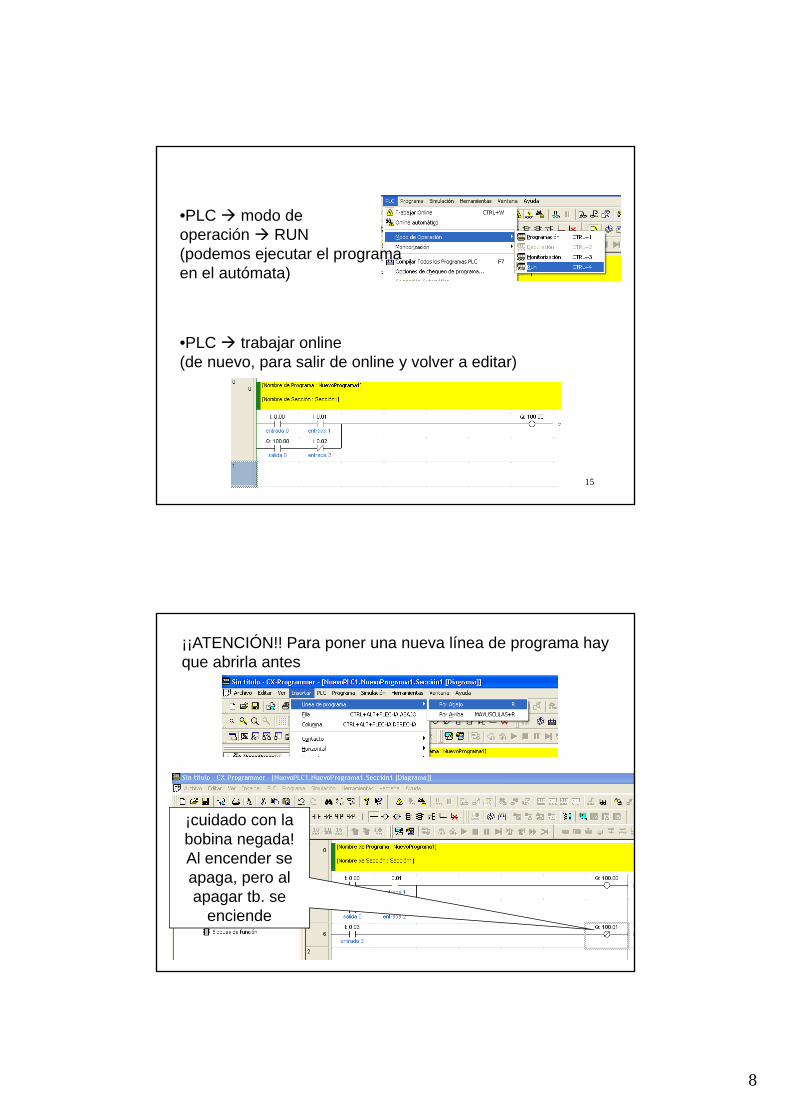
•PLC modo de operación RUN(podemos ejecutar el programa en el autómata)
•PLC trabajar online(de nuevo, para salir de online y volver a editar)
15
¡¡ATENCIÓN!! Para poner una nueva línea de programa hay que abrirla antes
¡cuidado con la bobina negada!
16
Al encender se apaga, pero al apagar tb. se
enciende

9
2. Programación en diagrama de contactos (ladder), áreas de memoria
17
18

10
19
variables básicas autómatas OMRON
• Entradas: 0.0, 0.1, 0.2 … (para todos los PLC’s)• Salidas: 100.00, 100.01, 100.2….para CP1L
010.00, 010.01…para CPM1, CPM2 • Variables de trabajo: W0.0, W0.1….para CP1L
200.00 200.01 para CMP1 CPM2
20

11
Memoria del OMRON CPM1
• Memoria dividida en canales= conjuntos de 16 bits, los cuales están agrupados en diferentes zonas.
• Hay zonas de canales que se pueden acceder bit a bit y otras• Hay zonas de canales que se pueden acceder bit a bit y otras donde los canales se acceden sólo como canal completo. En algunas zonas es necesario poner letras para especificar la zona de memoria y luego un número que indica el canal y el bit, en otras (las más usadas) basta con el número de canal y bit.
• Ejemplo:– XXX.YY bit YY del canal XXX (000.01, 010.03…)
HRXXX YY bit YY del canal XXX de la ona IR (Internal– HRXXX.YY bit YY del canal XXX de la zona IR (Internal Relays)
– DM346 canal 346 de la zona de DM (Data Memory) que sólo se accede con canales completos.
21
Memoria del OMRON CPM1
• Áreas de memoria
• IR- Internal Relays -- bits entradas salidas y relés internos deIR Internal Relays bits entradas, salidas y relés internos de trabajo
• SR - Special Relays -- indicadores del estado del autómata, utilidades.
• HR- Holding Relays -- bits de trabajo que retienen su estado.
• TR - Temporal Relays -- diagnóstico de programas complejos
AR A ili R l l d ó• AR- Auxiliar Relays --señaladores recursos autómata.
• LR - Link Relays -- intercambio de datos entre autómatas
• TC - Temporizadores y Contadores -- gestión de temp. y cont.
• DM- Data Memory -- gestión de datos numéricos y parámetros de configuración del autómata. 22

12
OMRON CPM1
• Área IR: Internal Relays, bits de trabajo accesibles como bit o como canal (dependiendo de las instrucciones que utilicemos para acceder a ellos)utilicemos para acceder a ellos)
• bits entrada: canales 000 al 009, es decir bits:000.00, …. 000.15001.00……001.15 etc. Sólo los 8 ó 10 primeros están conectados a las entradas reales del autómata, los otros pueden usarse como bits de trabajo. (En los bits conectados a las entradas yo no puedo escribir, son reflejo de las entradas físicas del
tó t )autómata)
23
OMRON CPM1
• Área IR: Internal Relays, bit lid l 010 l 019 d i bit• bits salida: canales 010 al 019, es decir bits:010.00, …. 010.15011.00……011.15 etc. Sólo los 8 ó 10 primeros están conectados a las salidas reales del autómata, los otros pueden usarse como bits de trabajo.
• bits de trabajo: canales 200 al 231, es decir bits:200.00, …. 200.15201.00……201.15 etc.
24

13
OMRON CPM1
Área SR: Special Relayscanales 232 a 255 (o bien SR232,…)
• 253.13 bit siempre a ON• 253.14 bit siempre a OFF• 253.15 indicador de primer ciclo (FIRST SCAN)• 254.00 reloj 1 minuto (medio minuto ON medio OFF)• 255.02 reloj de 1 segundo
255 05 indicador ma or q e• 255.05 indicador mayor que• 255.06 indicador igual que• 255.07 indicador menor que
25
OMRON CPM1
• Área TC: Temporizadores y Contadores• Área que se utiliza para gestionar temporizadores y contadores. Al
asignar un temporizadores se le asigna un número que será la posición de memoria donde se almacenen sus datos en el área TC. Al compartir los temporizadores y los contadores esta área no se debe asignar el mismo número a un temporizador y a un contador.
• Se puede acceder como bit o como canal, y recibimos diferente información según cómo lo hagamosinformación según cómo lo hagamos.
26
TIM000

14
27
28

15
CP1L memoria
29
CP1L BITS ESPECIALES
30(Menú Ver símbolos global)

16
3. Automatismos combinacionales y secuenciales
31
Al pulsar M avanza
FC0 FC1
Al pulsar M avanza.Cuando llega a FC1 retrocede.Al llegar a FC0 se para y espera a que volvamos a pulsar M.
32

17
Enclavamiento de variables: biestables o memoria binaria
• ¿Cómo puedo hacer que una variable guarde memoria de lo que ha pasado en la entrada?p
I:0.00 I: 0.01 Q: 100.00
Q: 100.00
33
I: 0.00
I: 0.01
Q: 100.00
Combinacional: las salidas dependen de las variables de entrada, relaciones de algebra booleana
¿Lógica combinacional? ¿lógica secuencial?
Secuencial: las salidas dependen de las variables de entrada y del valor de las entradas en instantes anteriores. El estado del sistema guarda memoria de los cambios y se memoriza mediante variables de estado (variables internas).
Circuitoentradas salidas
Circuitoentradas salidas
34
Circuito combinacional Elementos de
almacenamiento estado anterior
estado actual
Circuito combinacional

18
Biestables electrónicos
SET x
Biestables eléctricos
SET K1
+24 Vcc
RSET
Y
K1
RSET
0 Vcc
Biestables neumáticos
35Presión
Y
SET RESET
• Biestables CX-ONE
SET B
RSET B
c.e.
c.e.
c.e. : Condición de ejecución: si está activado se ejecuta la instrucción.
B: bit de las áreas IR, SR, AR, HR, LR
Si l E á 1 B 1 d d hSi la c.e. Está a 1 B se pone a 1 y queda en ese estado hasta ser desactivado por otra función.Si c.e. Está a 1 B se pone a 0 y queda en ese estado hasta ser activado por otra función.
36

19
SET 200 02000.01
Ejemplo:
SET 200.02
000.01
RSET 200.02000.02
200.02
000.02
37
38

20
39
Biestables en Codesys
40

21
Detección de flancos
Franco ascendente
DIFU 200.02
000.01
000.01
200.02scan
41
000.01
Franco descendente
DIFD 200.02
000.01
200.02scan
42

22
43
Ejemplo: proceso de electrólisis
44

23
Automatismo secuencial
Sistema cuyo funcionamiento emplea una secuencia de fasesclaramente diferenciadas, según un conjunto de reglaspreestablecidas. El final de cada fase, determinado por una
-sube (una vez arriba)-avanza (una vez en posición)
condición de transición lógica, da paso al inicio de la fasesiguiente.
-espera en aclarado-sube
Proceso de electrolisis
45
-baja (una vez abajo)-espera desengrase-sube-avanza-baja
-avanza-baja-espera en electrolito-sube-avanza…
Jaula: -sube (una vez arriba)-avanza (una vez en posición)-baja (una vez abajo)-espera desengrase-sube
0
1
2
SUBEinicio
AVANZAarriba
-avanza-baja-espera en aclarado-sube-avanza-baja-espera en electrolito
3
4
5
BAJAPosición desengrase
abajo
ESPERAFin espera
SUBE
46
5
6arribaAVANZA
Necesito guardar memoria del proceso

24
0
1
2
SUBEinicio
AVANZAfinal carrera arriba
3
4
5
BAJAFinal carrera posición desengrase
F.C. abajoESPERA
Temporizador Fin esperaSUBE
Estos dos “avanza” no son iguales
47
5
6
F.C. arribaAVANZA
6
F.C. posición aclaradoSUBE
F.C. arriba
4. Programación en GRAFCET
•Procesos secuenciales
•Procesos complejos
•No pretende minimizar el número de variables internas sino garantizar la fiabilidad y facilidad de test
48
fiabilidad y facilidad de test y mantenimiento.

25
Elementos fundamentales del GRAFCET
•Etapas: asociadas a acciones a realizar,deben corresponder a actuaciones del sistema en las que la relación entre entradas y salidas sea puramente combinacionalentre entradas y salidas sea puramente combinacional
etapa normal, identificada con un número
etapa inicial, se activa al comenzar el proceso
4
0
49
Cada etapa tiene una variable lógica asociada XiLa etapa puede estar activa Xi=1, o inactiva Xi=0
Activación de las etapas inicialesAl ser GRAFCET secuencial tenemos que inicializar alguna etapa, si no el proceso no comienza.
En el inicio etapas iniciales Xi =1 el resto a cero
SET X0
PRIMER CICLO(FIRST SCAN)0
•Se activa la etapa inicial en el primer ciclo, cuando el autómata se pone a RUN (una forma de inicializar)
50
SET X0
X1 X2 Xn
( )
•Se activa la etapa inicial cuando todas las otras están desactivadas (otra forma de inicializar)
…

26
•Líneas de evolución entre etapas (por defecto hacia abajo)
•Condiciones de transición, condiciones lógicas necesarias para que finalice una etapa y se pase a la siguiente. Hay que guardar el orden etapa-transición-etapa-transición….
•Transiciones dependientes del tiempo
i+1
CTi,i+1
6
7
A+ /b + c
(A ó no-b o flaco de subida de c)
i
51
•Transiciones dependientes del tiempo
6
7
4s/x6
La condición de transición se activará al pasar cuatro segundos después de la activación de la etapa 6 (temporizador a la conexión activado en etapa6)
Reglas de evolución entre etapas GRAFCET
•En el arranque se activa la(s) etapa(s) inicial(es) y se desactivan todas las demás•Una etapa se activa cuando está activa la anterior y se cumple la condición de transición entre ellas
i
i+1
CTi,i+1
i
i+1
CTi,i+1
52
•Una etapa se desactiva cuando se cumple la condición de transición con la etapa siguiente.
•El gráfico de evolución global GRAFCET debe ser siempre cerrado.

27
Traducción a diagrama de contactos
•Una etapa se activa cuando está activa la anterior y se cumple la condición de transición entre ellas
i
CTSET Xi+1
XiCTi,i+1
•Parte secuencial del programa GRAFCET
53
i+1
CTi,i+1RSET Xi
•Acciones, asociadas a las etapas. Son la parte combinacional de GRAFCET. Las acciones se pueden asignar de varias maneras:
•Asignación directa o modo continuo (asignación al estado) La variable de salida está activa mientras el estado está activo y se desactiva cuando el estado se desactivadesactiva cuando el estado se desactiva
•
•Asignación en evento o modo enclavado. La variable de salida toma un valor y lo mantiene hasta que se le asigne otro valor (función
8 Motor 1 BX8 Motor1
B
54
toma un valor y lo mantiene hasta que se le asigne otro valor (función SET/RESET)
8 Motor 1:=1 SET Motor 1X8

28
•Acciones condicionadas, se ejecutan cuando se cumple una condición
8 Motor 1 X8 Motor1B B
•Acción en la activación/desactivación de una etapa. Se ejecuta al activar/desactivar una etapa
8 contador:= contador +3
55
10 contador:= contador +3
Estructura básica de un programa GRAFCET
•Inicialización: gestión de arranques, paradas, fallos, etc.
•Arranque en frío: inicialización de un proceso automático sin•Arranque en frío: inicialización de un proceso automático sin guardar memoria de ninguna situación anterior.•Arranque en caliente: inicialización de un automatismo cuando éste guarda memoria de una situación anterior.
•Parte secuencialSucesión de acciones secuenciales, etapas.
Parte combinacional (accionamientos)
56
•Parte combinacional (accionamientos), Acciones a realizar en cada etapa.

29
Estructuras GRAFCET
•Secuencia lineal: sucesión etapa-transición-etapa-transición… En un momento dado, sólo puede existir una etapa activa en una secuencia lineal.
•Convergencia y divergencia “O”: procesos excluyentes (condición “if-else”)
C
57
•Convergencia y divergencia “Y”: procesos simultaneos
Convergencia y divergencia “O”
•Se utiliza cuando existen caminos alternativos de los cuales se escogerá únicamente uno, sólo los estados de ese camino estarán activos.
CTCT8,9
9
CT9,10 CT9,20 CT9,30
10 20 30
58
19CT19,40
25
CT25,40
40CT40,41
37
CT37,41
41

30
Divergencia “O”•En ella se inician varias secuencias lineales, cada una de ellas con su propia condición de transición, situada después de la divergencia. Las condiciones de las diferentes ramas deben ser excluyentes, de forma que sólo una de ellas pueda activarse cada vez.
CT8,9
9
CT9,10 CT9,20 CT9,30
10 20 30
SET X10
RSET X9
X9CT9,10
SET X20
X9CT9,20
59
0 30
RSET X9
SET X30
RSET X9
X9CT9,30
Convergencia “O”
•Las secuencias lineales que se inician en una divergencia “O”, deben confluir en una divergenica “O”, aunque no necesariamente los caminos que se inician a la vez deben confluir a la vez.•Caminos que se inician en una divergencia “O” no pueden confluir en una confluencia “Y”.
19CT19,40
25
C25,40
4037
SET X41
RSET X
X40CT40,41
60
40CT40,41
C37,41
41
RSET X40
SET X41
RSET X37
X37CT37,41

31
Convergencia y divergencia “Y”•Se utiliza cuando necesitamos que varios procesos se realicen simultáneamente y de forma independiente
8
CT8,9
9CT9
10 20 30
61
19
CTA
25
40
CTB
37
41
Divergencia “Y”
•En ella se inician varias secuencias lineales, todas ellas con la misma condición de transición situada antes de la divergencia.
SET X10
X9CT9
9CT9
10 20 30
SET X20
SET X30
62
RSET X9

32
Convergencia “Y”•Todas las ramas deben haber acabado para que se flanquee la convergencia “Y”, por ello suelen ser necesarios estados de espera. La condición de transición situada después de la divergencia se puede omitirpuede omitir.
SET X40
X25CTA
RSET X19
RSET X25
19
CTA
25
40
X19
63
Macroetapas•Una macroetapa es un conjunto de etapas agrupadas que se representan de forma resumida . Su expansión tiene una única etapa de entrada y una única etapa de salida.
E10
a
10.1
b+/c
10.2
8
C8
9C9
M10
•La expansión de una macroetapa debe tener sólo una etapa de entrada y una etapa de salida•El flanqueo de la transición anterior (1) activa la etapa de entrada (E10)
•El flanqueo de la transición posterior
64
S10
M10
11
C11
C10d
(2) sólo se realiza si está activada la etapa de salida (S10)•El flanqueo de la transición posterior (2) desactiva la etapa de salida (S10)

33
Macroetapas
E108 SET XMX9
C9
E10
a
10.1
b+/c
10.2
8
C8
9C9
M10
C10d
(1)
(2)
SET XM10
RSET X9
XM10 XS10
SET XE10
…C10
65
S1011
C11
SET X11
RSET XS10
10 10
Macroetapas
E108•La definición inicial excluye que una
ió d ll d d dE10
a
10.1
b+/c
10.2
8
C8
9C9
M10
C10d
(1)
(2)
expansión pueda ser llamada desde dos macroetapas (usar la macroetapa como subrutina) pero se suele utilizar siempre que el programador se asegure de evitar conflictos de acceso, no dejando que dos macroetapas accedan a la vez a la misma expasión.
66
S1011
C11

34
Etapas cercadas (enclosures)•Un conjunto de etapas pueden estar “cercadas” o incluidas en una etapa.
•Las etapas cercadas por otra sólo pueden tener activas sus etapas
10
80
a
81
b+/c
82
8
C8
9C9
10
pueden tener activas sus etapas mientras esté activa la etapa “cercadora” (X10)
•Si la etapa “cercadora” está activa, al menos una de las etapas de su “cercado” debe estar activa
67
83
10
11
C11
C10
d
G1
Etapas cercadas (enclosures)•Un conjunto de etapas pueden estar “cercadas” o incluidas en una etapa.
10•Al activarse la etapa “cercadora”
80
a
81
b+/c
82
8
C8
9C9
10
•Al activarse la etapa cercadora (X10) se activa la primera etapa de su cercado (X80)
•Al desactivarse la etapa “cercadora” (X10) se desactivan
68
83
10
11
C11
C10
d
G1
todas las etapas de su cercado (X80, X81, X82, X83)

35
Etapas cercadas (enclosures)•Una etapa puede cercar varios esquemas GRAFCET
8
C80
10
10
C8
9C9
10
11C10
a
81
b+/c
82
83
d60
G269
C1183
G1
m61
/m
82
m
•Las macroetapas y los cercados pueden anidarse
8
C80
61
10
C8
9C9
10
11C10
a
81
b+/c
82
83
d
60
m61
G2
70
C1183
G1
/m
82
m

















