07 Msmspo Gradiente Prog Cuadrática Con Excel 2014 1
29
Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H. 133 CAPÍTULO 6. PROGRAMACIÓN CUADRÁTICA, ENTERA Y BINARIA 1. MÁXIMOS Y MÍNIMOS LOCALES (RELATIVOS). MATRIZ HESSIANA Para la solución de problemas no lineales, como por ejemplo los modelos de Programación Cuadrática, existen diversas herramientas, entre estas se tiene el SOLVER de Excel, el LINGO y el propio MATLAB. El primero, durante su ejecución presenta opciones que el usuario debe elegir, como los que aparecen el diálogo que se muestra: Fig. 1 Ofrece tres solucionadores o “motores” y ellos son el GRG (Generalized Reduced Gradient) Nonlinear, el Simplex LP y el Evolutionary. Fig. 2 De otro lado LINGO tiene varios solucionadores o motores integrados para resolver diferentes tipos de modelos y estos son el General Solver, Linear Solver, Nonlinear Solver, Integer Solver (Branch- and-Bound), como puede apreciarse en las pestañas del diálogo LINGO Options. Nota. El objetivo de esta sección es explicar los conceptos de máximo, mínimo, gradiente, etc. que ayudarán a un adecuado uso de estas y otras herramientas, pero sólo para funciones de dos variables. Las definiciones y teoremas se extienden por analogía para el caso de funciones de más variables. 1.1 Definiciones básicas Sea ) , ( y x p un punto de dos variables y ) , ( 0 0 0 y x p un punto del dominio f D de una función ) ( p f , entonces: a) ) ( 0 p f es un máximo local (o relativo) de esta función, si existe una circunferencia ) , ( 0 r p B B de centro 0 p y de radio r, de modo que ) ( ) ( 0 p f p f para todo punto B D p f
-
Upload
jose-hugo-calderon-villanueva -
Category
Documents
-
view
21 -
download
0
Transcript of 07 Msmspo Gradiente Prog Cuadrática Con Excel 2014 1

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
133
CAPÍTULO 6. PROGRAMACIÓN CUADRÁTICA, ENTERA Y BINARIA 1. MÁXIMOS Y MÍNIMOS LOCALES (RELATIVOS). MATRIZ HESSIANA Para la solución de problemas no lineales, como por ejemplo los modelos de Programación Cuadrática, existen diversas herramientas, entre estas se tiene el SOLVER de Excel, el LINGO y el propio MATLAB. El primero, durante su ejecución presenta opciones que el usuario debe elegir, como los que aparecen el diálogo que se muestra: Fig. 1
Ofrece tres solucionadores o “motores” y ellos son el GRG (Generalized Reduced Gradient) Nonlinear, el Simplex LP y el Evolutionary. Fig. 2 De otro lado LINGO tiene varios solucionadores o motores integrados para resolver diferentes tipos de modelos y estos son el General Solver, Linear Solver, Nonlinear Solver, Integer Solver (Branch-and-Bound), como puede apreciarse en las pestañas del diálogo LINGO Options. Nota. El objetivo de esta sección es explicar los conceptos de máximo, mínimo, gradiente, etc. que ayudarán a un adecuado uso de estas y otras herramientas, pero sólo para funciones de dos variables. Las definiciones y teoremas se extienden por analogía para el caso de funciones de más variables. 1.1 Definiciones básicas Sea ),( yxp un punto de dos variables y
),( 000 yxp un punto del dominio fD de una función )( pf , entonces: a) )( 0pf es un máximo local (o relativo) de esta función, si existe una circunferencia
),( 0 rpBB de centro 0p y de radio r, de modo que )()( 0 pfpf para todo punto BDp f

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
134
b) )( 0pf es un mínimo local (o relativo) de esta función, si existe una circunferencia ),( 0 rpBB de centro 0p y de radio r, de modo que )()( 0 pfpf para todo punto
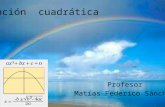
BDp f Fig. 3 La Fig.3 corresponde a la función
84),( 44 xyyxyxf , que tiene mínimos locales en los puntos: p2=(1, 1) y p3=(-1, -1). Mientras que p1=(0,0) corresponde a un punto de silla. 1.2 Gradiente y punto crítico Gradiente de una función )( pf se denota y define como: ),(),( yx ffyxf Ejemplo 1 Si 84),( 44 xyyxyxf entonces )44,44()( 33 xyyxpf Punto crítico Un punto p del dominio fD de una función )( pf es punto crítico si el gradiente: a) 0)( pf ó b) )( pf no existe. Ejemplo 2 Para el caso de la función 84),( 44 xyyxyxf , como es un polinomio tiene derivadas parciales continuas de todos los órdenes en cada punto ),( yxp de 2 . En consecuencia los puntos críticos son únicamente soluciones de la ecuación
)0,0(),(),( yx ffyxf , esto es del sistema no lineal:
044044
3
3
xyfyxf
y
x

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
135
Despejando x de la segunda ecuación y reemplazando en la primera se tiene: 044 9 yy de aquí sale 1,1,0 yyy . Reemplazando en cualquiera de las dos
ecuaciones se tiene 1,1,0 xxx respectivamente. En consecuencia los puntos críticos de esta función son )1,1();1,1(;)0,0( 321 ppp 1.3 El Teorema de la matriz Hessiana para el análisis de los puntos críticos Daremos en primer lugar las definiciones preliminares. Definición La matriz Hessiana de una función ),( yxf en un punto ),( yxp es la matriz:
yyfyxfxyfxxf
pH,,
)(
Los menores principales dominantes de la matriz Hessiana son los siguientes determinantes:
xxfpH )(1 , yyfyxfxyfxxf
pH,,
)(2
Teorema Sea ),( yxp un punto crítico de una función ),( yxf . Entonces: a) Si 0)(1 pH , 0)(2 pH . Entonces )( pf es un mínimo local o relativo de la función. b) Si 0)(1 pH , 0)(2 pH , (los menores principales de orden impar negativos y los de orden par, positivos). Entonces )( pf es un máximo local o relativo de la función. c) Si no se cumple ninguna de las dos primeras condiciones y 0)(2 pH , entonces el punto crítico p corresponde a un punto silla y ))(,( pfp es el punto de silla de la gráfica de la función. d) Si no se cumple ninguna de las dos primeras condiciones y 0)(2 pH , entonces nada se puede concluir respecto del punto crítico p, puede corresponder a un máximo, a un mínimo, a un punto de silla o ninguna de estas tres características. Ejemplo 3 En el ejemplo anterior se estableció que la función 84),( 44 xyyxyxf tiene los siguientes puntos críticos )1,1();1,1(;)0,0( 321 ppp . Se hará el análisis en estos puntos críticos a la luz del teorema de la matriz Hessiana.
2
2
12,44,12
)(,,
yx
pHyyfyxfxyfxxf

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
136
• Análisis en el punto )1,1(2 pp
12,44,12
)( pH de aquí 12)(1 pH y 1281614412,44,12
)(2
pH . En
consecuencia los menores principales satisfacen la parte (a) del teorema, esto quiere decir )1,1(2 p corresponde a un mínimo local y el valor mínimo de la función es 6)( 2 pf
• Análisis en el punto )1,1(3 pp
12,44,12
)( pH de aquí 12)(1 pH y 1281614412,44,12
)(2
pH .
Igual que en el caso anterior Como se cumple la parte (a) del teorema y de allí )1,1(3 p corresponde a un mínimo local y el el valor mínimo de la función es
6)( 3 pf . • Análisis en el punto )0,0(3 pp
0,44,0
)( pH
Como 0)(1 pH , no se cumple ni (a) ni (b). Pero (c) si se cumple. Luego de acuerdo al teorema )0,0(3 p corresponde a un punto de silla. 1.4 Máximos y mínimos locales ayudado por MATLAB Derivada de funciones con la parte simbólica de MATLAB Hay dos formas de hacer la derivación: a) Se declaran las variables x,y como variables simbólicas, luego se define la función y se usa el operador diff. >>syms x y ; f=x^4+y^4-4*x*y+8; fx=diff(f,'x'); fy=diff(f,'y'); fxy=diff(fx,'y');fxx=diff(fx,'x');fyy=diff(fy,'y'); b) Se declara la función simbólicamente y luego se usa el operador diff >>f='x^4+y^4-4*x*y+8'; fx=diff(f,'x'); fy=diff(f,'y'); fxy=diff(fx,'y');fxx=diff(fx,'x');fyy=diff(fy,'y'); Si la función es sencilla es más recomendable definir explícitamente la función y todas sus derivadas hasta el segundo orden. No se usa diff. >>syms x y ; f=x^4+y^4-4*x*y+8; fx= 4*x^3 - 4*y; fy= 4*y^3 - 4*x; fxx=12*x^2; fxy=-4; fyx=-4; fyy=12*y^2; Ejemplo 4 Consideremos nuevamente la función 84),( 44 xyyxyxf . Esta vez se harán los cálculos con la ayuda de MATLAB. Derivadas de la función Para calcular las derivadas seguiremos la opción (a)

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
137
>>syms x y ; f=x^4+y^4-4*x*y+8; fx=diff(f,'x'); fy=diff(f,'y'); fxy=diff(fx,'y');fxx=diff(fx,'x');fyy=diff(fy,'y'); Puntos críticos Para esto debe resolverse el siguiente sistema de ecuaciones con la función solve
(1)
044
0443
3
xyf
yxf
y
x
A manera de ejemplo lo haremos íntegramente con haremos con la ayuda de MATLAB. Como ya se tiene ingresado la función y todas las derivadas hasta el orden 2, llamando a la derivada parcial fx y nos entrega la expresión matemática de la misma. >>fx fx = 4*x^3 - 4*y Se copia la derivada 4*x^3 - 4*y y con ella se define la primera ecuación de (1) >>g='4*x^3-4*y=0'; En forma similar se hace con la segunda ecuación. >>h='4*y^3-4*x=0'; Para resolver el sistema (1) se hace: >>[x0,y0]=solve(g,h) x0 = 0 1 -1 (-1)^(3/4) -(-1)^(3/4) -i i -(-1)^(3/4)*i (-1)^(3/4)*i y0 = 0 1 -1 (-1)^(1/4) -(-1)^(1/4) i -i (-1)^(1/4)*i -(-1)^(1/4)*i Para una mejor presentación de la solución se puede hacer una tabla: >>TABLA=[x0 y0] TABLA = [ 0, 0] [ 1, 1] [ -1, -1] [ (-1)^(3/4), (-1)^(1/4)]

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
138
-2 -1 0 1 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.5 0 0.5-0.5
0
0.5
[ -(-1)^(3/4), -(-1)^(1/4)] [ -i, i] [ i, -i] [ -(-1)^(3/4)*i, (-1)^(1/4)*i] [ (-1)^(3/4)*i, -(-1)^(1/4)*i] La solución del sistema de ecuaciones (1) con la parte simbólica de MATLAB nos entrega las reales, que está formada por las 3 primeras filas de la tabla y también las soluciones imaginarias que son las filas restantes. • Análisis en el punto )1,1(2 pp =[1,1] que es x0(2) y y0(2) Los valores del punto crítico se guarda en las variables simbólicas x,y que definen la función objetivo: >>x=x0(2);y=y0(2); Luego se evalúa la matriz Hessina en este punto: >>H=[eval(fxx),eval(fxy);eval(fxy),eval(fyy)]; H = [ 12, -4] [ -4, 12] Como H1=12>0 y H2=det(H)=128>0 de acuerdo a la parte (a) del teorema se concluye que el punto crítico [x0,y0]corresponde a un mínimo relativo. El análisis en los otros puntos críticos es similar. Gráfica del campo vectorial del gradiente y de los posibles puntos críticos >>v=-2:0.2:2; [x,y]=meshgrid(v); z=x.^4+y.^4-4*x.*y+8; [px,py] = gradient(z,.2,.2); contour(v,v,z), hold on, quiver(v,v,px,py), hold off, hold on PC=[0 1 -1;0 1 -1]; plot(PC(1,:),PC(2,:),'bo', 'MarkerFaceColor',[.49 1 .63],'MarkerSize',8)

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
139
Ejemplo 5 Consideremos ahora la función )3cos(10422),( 2242 yxyxxyxyxf . Se quiere determinar los puntos críticos y analizar si corresponden a máximos, mínimos o puntos de silla. Para todo ello nos ayudamos con MATLAB. Se escribirá el sistema de ecuaciones para los puntos críticos, solamente como referencia:
(2)
0)3(3048
0)3(20822223
2
yxsenxyf
yxxsenxyxf
y
x
Derivadas de la función Lo hacemos con la opción (a) >>syms x y ; f=-x^2-2*y^4-2*x+4*x^2*y+10*cos(x^2-3*y); fx=diff(f,'x'); fy=diff(f,'y'); fxy=diff(fx,'y');fxx=diff(fx,'x');fyy=diff(fy,'y'); Puntos críticos Llamando a la derivada parcial fx y nos entrega la expresión matemática de la misma. >>fx fx = 8*x*y - 2*x - 20*x*sin(x^2 - 3*y) – 2 Se copia y con ella se define la primera ecuación de (2). En forma similar se hace con la segunda ecuación y se tiene: >>g='8*x*y - 2*x - 20*x*sin(x^2 - 3*y) - 2'; h='30*sin(x^2 - 3*y) + 4*x^2 - 8*y^3'; luego se activa el comando solve >>[x0,y0]=solve(g,h) x0 =-2.8295754103261983835991918633549 y0 =1.8729503110757000531201722498234 Sale un solo punto crítico. Este se guarda en las variables simbólicas x,y que definen la función objetivo: >>x=x0;y=y0; Luego se evalúa la matriz Hessina en este punto: >>H=[eval(fxx),eval(fxy);eval(fxy),eval(fyy)]; H= [232.760401508682970595394538, 101.127842338610682005814423] [101.127842338610682005814424, -18.581255860093671399205943] Como H2=det(H)= -14551.821070593870494196620000799<0 se concluye que el punto crítico [x0,y0]corresponde a un punto de silla. 2. MÉTODO DEL GRADIENTE HEURÍSTICO En realidad el estudio de los máximos, mínimos y puntos de silla de la función

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
140
)3cos(10422),( 2242 yxyxxyxyxf no ha terminado por que con las gráficas que sigue se ve que hay muchos puntos críticos más, que MATLAB no ha podido determinar, por ejemplo • Mediante un programa en Visual C++ se obtiene un nuevo punto crítico: x0= 2.37228162050705; y0= 1.68843852388413; para estos valores la norma de gradiente es: >> Gf=[eval(fx),eval(fy)]; Ngr=norm(Gf) Ngr=6.9095e-013=0.000000000000069095 esto ratifica que efectivamente es un punto crítico. Haciendo el análisis con la matriz Hessiana se tiene: x=x0;y=y0; >> H=[eval(fxx),eval(fxy);eval(fxy),eval(fyy)] H = -189.5934 139.3918 139.3918 -144.5576 como H2=det(H)= 7.9771e+003>0 y H1<0, se concluye que el punto crítico [x0,y0] corresponde a un máximo local. • Campo vectorial del gradiente >>v=-4:0.2:4; [x,y]=meshgrid(v); z=-x.^2-2*y.^4-2*x+4*x.^2.*y+10*cos(x.^2-3*y); [px,py] = gradient(z,.2,.2); contour(v,v,z), hold on, quiver(v,v,px,py), hold off, hold on PC=[x0;y0]; plot(PC(1,:),PC(2,:),'bo', 'MarkerFaceColor',[.49 1 .63],'MarkerSize',8);
Campo vectorial del gradiente , Fig.1 Gráfica del sistema de ecuaciones (2) Fig.2
-4 -2 0 2 4-4
-3
-2
-1
0
1
2
3
4

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
141
El sistema de ecuaciones (2) del ejemplo 5, ha sido graficado (Fig.2) con un programa en Visual C++ , con el rango [-4, 4] para las dos variables “ x , y”, coloreando de rojo la primera ecuación y de azul la segunda. Se observa que las dos curvas tienen muchos puntos de intersección, lo que significa que el sistema (2) tiene muchas soluciones más. En consecuencia es importante conocer los aspectos matemáticos y algunos algoritmos que emplean las herramientas para calcular los puntos críticos y los valores extremos de funciones de varias variables. Se tienen dos métodos generales conocidos como: Método del Gradiente y el Método de Newton. El primero permite encontrar un máximo o mínimo local y el segundo un punto crítico. Se estudiará solamente el método del gradiente y no así el método de Newton, por razones de espacio y tiempo. 2.1 Método del Gradiente Fig.3 En la Fig.3 la superficie azul es la gráfica de una función ),( yxf ,
),( 000 yxp un punto del plano XY, “ u ” un vector unitario,
))(,()( 00 tupftuptg es la curva (amarilla) que se forma al restringir los valores de la función
),( yxf , a la recta que pasa por 0p en la dirección del vector “ u ”. T es la recta tangente en el punto
)),(,,()0( 00000 yxfyxqg a la
curva )(tg . La derivada direccional )( 0pfDu
en un punto ),( 000 yxp y en la
dirección de un vector unitario “u ”, es la pendiente de la recta tangente T. Se probará, más abajo, que la recta tangente apunta en la dirección del máximo crecimiento de la función, cuando la dirección unitaria es el gradiente. Proposición 1 El máximo valor de la derivada direccional )( 0pfD
u (la pendiente de la tangente T),
manteniendo fijo el punto 0p y haciendo variar todas las direcciones “u ”, se origina
cuando la dirección es paralela al gradiente )( 0pf y su valor máximo es )( 0pf .
El mínimo valor de )( 0pfDu
se da en la dirección contraria al gradiente y su valor es
)( 0pf .

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
142
-4-2
02 4
-4-2
02
4-15
-10
-5
0
5
10
15
La demostración sale de la relación )cos()()()( 0 pfupfpfDu
donde es el
ángulo que forman el gradiente y el vector unitario. Entonces el máximo valor de la derivada direccional )( 0pfD
u se dará cuando 0 , es decir cuando el gradiente y el
vector unitario son paralelos.
Visualizando las curvas de nivel y el campo de vectores del gradiente de la función
yxyxyxf 212),( 22 (ver códigos más abajo)
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
v = -3:0.5:3; [x,y] = meshgrid(v); z =12-x.^2-y.^2+x+2*y; surfl(x,y,z)
v = -3:0.5:3; [x,y] = meshgrid(v); z =12-x.^2-y.^2+x+2*y; [px,py] = gradient(z,.2,.2); contour(v,v,z), hold on, quiver(v,v,px,py), hold off
Se observa que todos los vectores gradiente apuntan en la dirección del máximo crecimiento de la función, donde su máximo está en el punto: (0.5, 1). 2.2 El algoritmo del Gradiente Heurístico
a) Búsqueda de un máximo local
De acuerdo a la proposición 1, si el vector u es paralelo a )( 0pf , entonces tomando en
cuenta que )()()(0
00 pfDt
pftupfu
)( 0pf , para valores “muy pequeños de
0t ”, se concluye que )()( 00 pftupf y de aquí ))(()( 00 pfspfsg crece
para valores positivos “muy pequeños de s ”.

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
143
Entonces para un ts se tiene un punto )( 001 pftpp donde )()( 01 pfpf . Con
1p se repite el proceso y así se consigue una sucesión de puntos ............,,, 10 mppp que
convergen a un punto crítico, si la norma del gradiente )( mpf tiende a cero. Su
decrecimiento se va controlando mediante una tolerancia, por ejemplo 010 6 tol ,
cuando el módulo del gradiente llega a estar por debajo de tol , se detiene el proceso.
En el contexto de los códigos o programas, la sucesión de puntos se consigue de la
siguiente manera: se toma una variable ),........( 1 nxxp , se le asigna un valor inicial,
dentro de un rango permitido y conveniente, luego se va actualizando según la relación
)( pftpp , donde “ t ” es un número pequeño fijo (En el campo de las Redes
Neuronales se le llama tasa o velocidad de aprendizaje).
b) Búsqueda de un mínimo local
El razonamiento es completamente similar al caso de los máximos locales. Para encontrar
la secuencia de puntos que tienden a un punto crítico donde la función consigue su
mínimo, se aplica la regla de actualizaciones )( pftpp
c) Programa del gradiente heurístico, controlado por un número de operaciones en un bucle for. Ejemplo 2 Hallar un mínimo local de la función: 84),( 44 xyyxyxf Programa 1 Ingreso de variables y funciones simbólicas syms x y ; f=x^4+y^4 -4*x*y + 8; fx=diff(f,'x'); fy=diff(f,'y'); % valor inicial p=[-0.5,-2];t=0.06; % bucle de iteración for i=1:50 x=p(1); y=p(2); vf=eval(f); sol(i,:)=[i,p(1),p(2),vf]; % Cálculo de vector Gradiente: Gf Gf=[eval(fx), eval(fy)]; p=p-t*Gf; % mínimo local Curva(i)=norm(Gf); end plot(Curva,'b'); % Curva de validación

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
144
0 50 100 150 200 250 3000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
NO
RM
A D
EL
GR
AD
IEN
TE
ITERACIÓN
ylabel('NORMA DEL GRADIENTE'); % comentario eje Y xlabel('ITERACIÓN'); % comentario eje X Llamando a sol sale la siguiente secuencia de filas, donde la primera componente de la fila es el orden de iteración, las dos siguientes son las componentes del punto crítico y la cuarta es el valor de la función en este punto: >> sol 1.0000 0.9500 0.2000 20.0625 2.0000 0.7922 0.4261 8.0561 3.0000 0.7752 0.5977 7.0767 ……………………………………. 15.0000 0.9996 0.9996 6.0000 16.0000 0.9998 0.9998 6.0000 17.0000 0.9999 0.9999 6.0000 18.0000 0.9999 0.9999 6.0000 19.0000 1.0000 1.0000 6.0000 20.0000 1.0000 1.0000 6.0000 ……………………………………. 50.0000 1.0000 1.0000 6.0000 Luego un punto crítico y el valor mínimo de la función en este punto son:
P=[1.0000,1.0000]; f(p)=6.0000 respectivamente d) Programa del gradiente heurístico controlado por una tolerancia en un bucle while. Este programa corre hasta que la norma del gradiente de la función objetivo esté por debajo de una tolerancia tol, en cuanto esté por debajo termina el proceso, de lo contrario irá hasta que termine la iteración, que en escaso se ha fijado como 1000. Ejemplo 3 Hallar un máximo local de la función: )12exp()1(),( 22 xyxyxyxf Programa 2 Ingreso de variables y funciones simbólicas syms x y ; f=(x-1)*y*exp(-x^2-y^2+2*x-1); fx=diff(f,'x'); fy=diff(f,'y'); p=[0.5,1];t=0.06; tol=0.0001; x=p(1); y=p(2);i=1; Gf=[eval(fx), eval(fy)]; NGf=norm(Gf); while((NGf>tol)&&(i<=1000)) x=p(1); y=p(2); vf=eval(f); sol(i,:)=[i,p(1),p(2),vf]; Curva(i)=norm(Gf); NGf=norm(Gf); Gf=[eval(fx), eval(fy)]; p=p+t*Gf; % máximo local i=i+1;

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
145
end plot(Curva,'r'); % Curva de validación ylabel('NORMA DEL GRADIENTE'); % comentario eje Y xlabel('ITERACIÓN'); % comentario eje X Llamando a sol sale la siguiente secuencia de filas, donde la primera componente de la fila es el orden de iteración, las dos siguientes son las componentes del punto crítico y la cuarta es el valor de la función en el punto crítico: >> sol 1.0000 0.5000 1.0000 -0.1433 2.0000 0.5086 1.0086 -0.1408 3.0000 0.5175 1.0173 -0.1382 4.0000 0.5267 1.0260 -0.1355 5.0000 0.5361 1.0347 -0.1327 …………………………………………………………………………………………………… 253.0000 1.7070 0.7073 0.1839 254.0000 1.7070 0.7072 0.1839 255.0000 1.7070 0.7072 0.1839 256.0000 1.7070 0.7072 0.1839 257.0000 1.7070 0.7072 0.1839 258.0000 1.7071 0.7072 0.1839
Entonces el algoritmo permitió hallas un punto crítico y el valor mínimo de la función en este punto son: P=[1.7071, 1.7072]; f(p)=0.1839 respectivamente Nota: El método del Gradiente Conjugado Este método está reservado a funciones cuadráticas, cuya matriz asociada a la parte cuadrática es simétrica y positiva definida. (Ver la sección 3 de este capítulo) 2.3 Búsqueda de máximos y mínimos locales con LINGO Ejemplo 4 Consideramos la función 84),( 44 xyyxyxf (ver gráfica en la sección 1.1) Con la sintaxis del LINGO Min=x^4+y^4-4*x*y+8; @FREE(x); @FREE(y); Resultado Local optimal solution found. Objective value: 6.000000 Extended solver steps: 1 Total solver iterations: 8 Variable Value Reduced Cost X 1.000000 -0.3111109E-07 Y 1.000000 -0.3111109E-07

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
146
3. MÁXIMOS Y MÍNIMOS GLOBALES. PROGRAMACIÓN CUADRÁTICA
3.1 Conceptos preliminares
El problema consiste en hallar el máximo o mínimo de una función ),......,,( 21 nxxxf de
n variables en una región o subconjunto (no vacío) K de n . Existen diversos casos
dependiendo de la función y de la región. Los métodos dependen de estos casos. La
mayoría de los problemas de aplicación se formulan en regiones convexas (temas que
fueron tratados en el capítulo 4) y para funciones convexas,
Recordemos que las regiones definidas por las inecuaciones lineales
cxaxaxa nn ...2211 y cxaxaxa nn ...2211 , son conjuntos convexos y
cerrados y de aquí la intersección (no vacía) de un número finito de conjuntos convexos y
cerrados es también un conjunto convexo y cerrado. El conjunto solución de un sistema
de ecuaciones es un conjunto convexo y cerrado.
Funciones convexas definidas en regiones convexas y cerradas
Recordemos que una función ),......,,()( 21 nxxxfxf es convexa en una región convexa
D si dado dos puntos p, q cualesquiera de la región K , se satisface la relación siguiente:
)()()1())1(( qftpfttqptf para todo 10 t .
Una función ),......,,()( 21 nxxxfxf es cóncava si su opuesto es convexa.
3.2 Marco teórico de la Programación Cuadrática Un problema de programación cuadrática (PC) se diferencia de un problema de Programación Lineal (PL) en la función objetivo, que en el caso cuadrático es un polinomio cuadrático en las variables del modelo. Las restricciones o el conjunto de factibilidad están descritas por desigualdades lineales en ambos casos. Ejemplo 1
0,3351423:
4235 22
yxyxyxaSujeto
yxxyyxFMax

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
147
La función objetivo de los modelos de PC pueden ser llevados a su forma matricial, expresándolo como LppQppF T )( donde Q es la matriz de los coeficientes de la parte cuadrática, L los coeficientes de la parte lineal y p es un punto de nR . La matriz de la parte cuadrática, tiene la diagonal formada por los coeficientes de los términos cuadráticos y las otras componentes son la mitad de los términos mixtos, manteniendo el orden en que están dispuestas las variables. Por ejemplo en el modelo anterior el término en xy se multiplica y divide por 2, así
yxxyyxyxxyyx 42)5.0(2354235 2222
La matriz de la parte cuadrática es
35.05.05
Q
La matriz de la parte lineal es ]4,2[L
y donde el punto
yx
p .
Entonces:
xyyxyxyxyxpQp
yxyyxxyxyx
yxyx
yxpQp
T
T
2222 3535.05.05
)35.0()5.05(35.05.05
],[35.05.05
],[
y yxpLp 42*]5,2[ Existe una clase de funciones cuadráticas, cuya matriz de su forma cuadrática Q es simétrica, definida positiva, esto es tiene todos sus valores propios no negativos. Aparecen en muchos problemas de aplicación y son aquellas, para las cuales se tienen marcos teóricos muy consistentes y desde el punto de vista matemático, son extraordinariamente bellos y sorprendentes. Parte del marco teórico se recoge en el siguiente: Teorema 1 Sea Q una matriz simétrica y pQppG T)( una función cuadrática asociada a la indicada matriz. Entonces son equivalentes las siguientes afirmaciones: a) Todos los valores propios de Q son estrictamente mayores que cero. b) Los menores principales dominantes de Q (ver sección 1) son todos estrictamente mayores que cero. c) 0)( pQppG T para todo 0p en nR . Observación: Las tres equivalencias anteriores se mantienen, cambiando la frase “estrictamente mayor que cero” por “mayor o igual que cero”. Teorema 2 Con las hipótesis del teorema anterior y si se cumple una de las afirmaciones. Entonces a) pQppG T)( es una función estrictamente convexa. b) Si la matriz Q es solo definida positive, entonces )( pG es sólo convexa.

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
148
Teorema 3 Sean mvvv .......,, 21 vectores de nR y ][ ji vvQ la matriz de Gram de estos vectores, formada por los productos internos, dos a dos de ellos. Entonces a) La matriz de Gram ][ ji vvQ es estrictamente positiva definida si y solo si los
vectores mvvv .......,, 21 de nR son linealmente independientes. b) La forma cuadrática pQppG T)( será estrictamente convexa si los vectores que determinan la matriz de Gram son L.I. 4. PROGRAMACIÓN CUADRÁTICA CON EXCEL (2010) 4.1 Selección de una cartera de inversiones con datos históricos
La siguiente tabla muestra el rendimiento histórico de los activos de tres empresas: (A, B,
C), durante 12 años. Los rendimientos medios o promedios de los activos de A, B, y C
son ucubua ,, respectivamente.
A B C 0.300 0.225 0.149 0.103 0.290 0.260 0.216 0.216 0.419 -0.046 -0.272 -0.078 -0.071 0.144 0.169 0.056 0.107 -0.035 0.038 0.321 0.133 0.089 0.305 0.732 0.090 0.195 0.021 0.083 0.390 0.131 0.035 -0.072 0.006 0.176 0.715 0.908
Un inversionista desea saber qué porcentaje de su capital debe invertir en cada una de los
tres activos de tal modo que pueda obtener un rendimiento anual mayor o igual al 15% y
no desea colocar más del 75% en cada una de las tres acciones.
Esto equivale a resolver el siguiente problema de programación cuadrática
Min )(2222222 yzxzxyzyxF bcacabcaba
Sujeto a las siguientes restricciones:
15.0 uczubyuax , (rendimiento anual esperado)
1 zyx (inversión de todo el capital en los tres activos)
75.0x (no desea colocar más del 75% en A)

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
149
75.0y (no desea colocar más del 75% en B)
75,0z (no desea colocar más del 75% en C)
0,, zyx
Ésas restricciones definen una región de factibilidad convexa y cerrada.
La función objetivos es un forma cuadrática, denominada varianza del rendimiento que
puede escribirse en la su forma matricial como pppF T)( , donde
zyx
p es el
vector de las variables y
cccbca
bcbbba
acabaa
es la Matriz de covarianzas de los tres
activos. La componente aa es la varianza que mide la dispersión de activos de A
respecto de su media. Por ejemplo si se guarda en el arreglo o vector (en la sintaxis de
MATLAB)
)](),......,2(),1([ naaaa , los datos históricos de A y tiene promedio o media ua ,
entonces
n
j
n
jaa n
uajan
uajauaja1
2
1
))(())(())(( .
La componente ab es la covarianza de los activos de A y B. Esta mide la dispersión
conjunta de los dos activos respecto de sus medias. Por ejemplo si los activos de B se
guardan en el vector )](),......,2(),1([ nbbbb y tiene media ub , entonces la covarianza
conjunta de A y B es:
n
jab n
ubjbuaja1
))(())(( . Así sucesivamente.
Observación
En realidad es la matriz de Gram, de los vectores: Uaa , Ubb , Ucc de nR ,
dividida por el factor n y donde
)](),......,2(),1([ naaaa , ],......,,[ uauauaUa
)](),......,2(),1([ nbbbb , ],......,,[ ubububUb

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
150
)](),......,2(),1([ ncccc , ],......,,[ ucucucUc
Proposición 1
Si los vectores Uaa , Ubb , Ucc son LI. Entonces por el teorema 3, de la sección
anterior, la matriz de covarianzas , es estrictamente definida positiva y de aquí la
función objetivo pppF T)( es estrictamente convexa.
NOTA; es fácil comprobar, mediante el pivoteo de Gauss, que los tres vectores aludidos
del ejemplo 2, son LI.
4.2 Solución con Solver de Excel Llenado de datos En una hoja de cálculo del Excel, se llenan las columnas con el rendimiento histórico de los activos de las empresas A, B, C (puede hacer un copy directamente. Si tuviera problemas con el punto decimal, cambie todos por comas. Para esto entre a la barra de herramientas del Excel --> Inicio--> Buscar y Seleccionar-->Reemplazar):
Construcción de la matriz de covarianza a) Para calcular la componente aa de la matriz de covarianzas, se fija el cursor en la celda A15, luego vaya a la barra de funciones y haga clic en y busque aquí la función COVAR Hacer clic en Aceptar y sale la tarjeta

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
151
Para llenar el rango de la ventana Matriz 1, se arrastra el Mouse sobre columna de datos de A, que va de A2 a A13 y esto se refleja en dicha ventana como A2:A13 Para llenar el rango de la ventana Matriz 2, se arrastra el Mouse sobre la misma columna de datos de A y se ve en la ventana Matriz 2 el mismo resultado.
Se hace clic en Aceptar y se obtiene en la celda A15 el valor de la componente aa .

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
152
b) Para calcular la componente ab de la matriz de covarianzas, fije el cursor en la celda B14, luego ir a la barra de funciones y activar la función COVAR, hacer clic en Aceptar y de vuelta sale la tarjeta correspondiente.
Para llenar el rango de la ventana Matriz 1, se arrastra el Mouse sobre columna de datos de A, que va de A2 a A13 y luego para llenar la ventana Matriz 2 se arrastra el Mouse sobre columna de datos de B. que va de B2 a B13, lo que se observa en la ventana Matriz 2. Se hace clic en Aceptar y sale el valor de ab en la celda B15
c) Para calcular la componente ac de la matriz de covarianza, se deja el curso en la celda C15, luego se activa la función COVAR, hacer clic en Aceptar y de vuelta sale la misma tarjeta. Para llenar la ventana Matriz 1, se arrastra el Mouse sobre columna de datos de A y luego para llenar la ventana Matriz 2, se arrastra el Mouse sobre columna de datos de C que va de C2 a C13, lo que se observa en la ventana Matriz 2. Se hace clic en Aceptar y sale el valor de ac en la celda C15

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
153
Se repite el mismo procedimiento para el resto de las componentes de la matriz de covarianzas, obteniendo el siguiente cuadro
Celdas para las variables de decisión Se separan las celdas E2, F2, G2 para las variables de decisión x, y, z. Celdas para el producto de la matriz de covarianza con las variables de decisión En las celdas E3, F3, G3 se guarda el producto de la matriz de covarianza por la fila de las variables. Por ejemplo en E3 se guarda el producto de la primera fila de la matriz de covarianza por la fila de las variables E2, F2, G2, esto es: E3 = A15*E2+B15*F2+C15*G2. Esto Se consigue con la función SUMAPRODUCTO del Excel, donde se llenan sus dos ventanas arrastrando el Mouse sobre las filas de las celdas que se quieren multiplicar. Igualmente se hace con las celdas F3 y G3.
Construcción de la función objetivo en su forma matricial

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
154
En las celdas E4 se guarda la función objetivo=E2* E3+ F2* F3+G2*G3, que se consigue con la función SUMAPRODUCTO del Excel. De esta forma se ha definido con el Excel la función objetivo pero en su forma matricial.
Coeficientes de las ecuaciones de restricción y el lado derecho Las ecuaciones de restricción son:
15,0 uczubyuax , 1 zyx ; 75,0x ; 75,0y ; 75,0z ; 0,, zyx
Las medias ucubua ,, son coeficientes de la primera restricción y ocupan las celdas E7,
F7, G7
La otra restricción es la ecuación cuyos coeficientes son todos unos. Estos ocupan las
celdas: E8, F8, G8.
La tercera restricción tiene solo una variable, entonces se considera la fila de coeficientes
1, 0, 0 y ocupan las celdas E9, F9, G9. Así sucesivamente los otros coeficientes.
El lado derecho de las inecuaciones ocupa las celdas H13, H14, H15. H16, H17.
Las ecuaciones de las restricciones La ecuación de la primera restricción: uczubyuax , se escribe en la celda E13, allí con la función SUMAPRODUCTO del Excel, se hace el producto indicado. Una vez activada esta función, la ventana Matriz 1, se llena arrastrando el Mouse sobre las celdas E7, F7, G7 donde están los coeficientes, luego la ventana Matriz 2, se llena arrastrando el Mouse sobre la fila de las variables esto es E2, F2, G2. De esta manera se completan todas las ecuaciones. Solución con el SOLVER a) Se ubica el cursor en la celda de la función objetivo E4

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
155
b) Clic en Datos y después SOLVER (si no estuviera instalado el SOLVER, hacer lo que se indica en (h), al final de este ejemplo)
Sale la siguiente tarjeta:
Se marca Mín. En la ventana Cambiando las celdas de variables, se deja el cursor y con el Mouse se arrastra las celdas de las variables: E2, F2, G2
c) Luego se incorporan las ecuaciones de las restricciones. Se hace clic en el botón Agregar. Se hace clic en Referencia de la celda y luego clic en la celda E13 donde se

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
156
encuentra la primera ecuación. Se elige el tipo de desigualdad. Clic en Restricción y luego clic en la celda H13
Se hace clic en Aceptar y se tiene incorporada la primera restricción. Con las otras se sigue el mismo camino.
d) Se ingresa a la ventana Método de resolución, donde se elige GRG Nonlinear por que la función objetivo es cuadrática. Ingresando al botón Opciones -->GRG Nonlinear, sale el diálogo:
Donde el tipo de derivación numérica que sale por defecto es la Derivada Adelantada.

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
157
e) Luego clic en Aceptar y sale de nuevo la tarjeta anterior (parte c). Allí Resolver. En Informes se marca: Responder, Confidencialidad (Sensibilidad) y Límites, para obtener tres reportes.
f) Clic en el botón Aceptar y sale la hoja de cálculo con los resultados buscados:
Respuesta: la recomendación es la siguiente: invertir en A el 53.00%, en B el 35.64% y en C el 11.34%. En estas condiciones el mínimo de la varianza del rendimiento es 0.02054595 g) Al final de la hoja de cálculo salen tres pestañas: Informe de Respuestas, Informe de Sensibilidad y el Informe de Límites, que son los tres informes solicitados.

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
158

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
159
4.3 Instalación del SOLVER Posicionarse en Fórmulas, luego botón derecho del mouse y hacer clic en Personalizar barra de herramientas de acceso rápido
Sale una nueva tarjeta y allí hacer clic en Complementos
Luego hacer clic en el botón Ir
Sale la tarjeta:
Marcar SOLVER y luego el botón Aceptar. En la barra de herramientas activar Datos. En el casillero derecho aparece SOLVER.

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
160
Ejercicios 1. En los ejercicios que siguen resuelva haciendo uso de los métodos analíticos pero ayudado por MATLAB. a) Dada la función xy12xyyx3)y,x(f 32 , encuentre sus puntos críticos y analice cuáles de ellos corresponden a máximos, mínimos y puntos de silla, haciendo uso de la matriz Hessiana. b) Aplicando el método del gradiente, determine un valor extremo de la función: 4)3(12)3()3(3),( 222 yxyxyxyxf c) xyxyyxyxf 123),( 32 . Halle sus puntos críticos y sus valores extremos. d) 4)3(12)3()3(3),( 222 yxyxyxyxf . Halle sus puntos críticos y sus valores extremos. 2. Haciendo uso de EXCEL resuelva el problema que sigue. Max 222),,( zyxzyxf sujeto a las restricciones: 632 zyx 1 zyx
3. En los ejercicios que siguen resuélvalos haciendo uso de los métodos analíticos pero ayudado por MATLAB. a) 24624),( 22 yxxyyxyxF
b) 264)2()3(),( 33 yxyxyxF
c) )4exp(),( 22 yyxyxF
d) )exp(),( 22 yxxyyxF
e) 36343)(),( 222 yxyxyxxsenyxF
4. Aplicando el método del gradiente, halle un máximo y un mínimo relativo de las
siguientes funciones, tomando en consideración los datos que se indican:

Matemática para el Modelamiento de Sistemas de Producción y Operaciones. Universidad Nacional de Ingeniería – Facultad de Ingeniería Industrial y de Sistemas–Sección de Post Grado Pedro C. Espinoza H.
161
a) 2464),( 22 yxyxyxF , p0=(4, 5), iteraciones N=100.
b) 253)2()3(),( 22 yxyxyxF , p0=(3,4), iteraciones N=10.
c) )4exp(),( 22 yyxyxF , p0=(2,2), iteraciones N=100.
d) )exp(),( 22 yxxyyxF ; p0=(3,2), iteraciones N=100.
e) 322 43)cos(),( yxxyxyxf
5. Una compañía tiene 5 fábricas A, B, C, D y E, localizadas en los puntos (10,10),
(30,50), (16.667, 29), (0.555, 29.888) y (22.2221, 49.988). Supongamos que la distancia
entre dos puntos representa la distancia que hay entre las fábricas correspondientes,
medido por carretera y en kilómetros. La compañía planea construir un almacén para
componentes en algún punto del plano y desde el cual debe enviar semanalmente 10, 18,
20, 14, y 25 remesas a cada una de la fábricas: A, B, C, D y E respectivamente. Si se
quiere minimizar la distancia semanal recorrida por el total de vehículos que participan
en los envíos, ¿en qué lugar hay que situar, idealmente el almacén?
La función objetivo que minimiza la distancia semanal recorrida desde el almacén a cada
una de las cinco fábricas es la siguiente:
2222
222222
)988.49()2221.22(25)888.29()555.0(14
)29()667.16(20)50()30(18)10()10(10
yxyx
yxyxyxZ
a) Use el método del gradiente para hallar la solución, tomando cualquier punto como
punto inicial.
b) Cambie el punto inicial y halle la solución. ¿Cuál es la razón para que la solución no
dependa del punto inicial?
c) Grafique la función eligiendo un rectángulo que contenga a todos los puntos de
localización de las fábricas.
6. Se tiene la siguiente función: 322 43)cos(),( yxxyxyxf
Halle los puntos críticos de ),( yxf , resolviendo el sistema de ecuaciones formado por
sus derivadas parciales y luego examine analíticamente si corresponden a un máximo,
mínimo o punto de silla.