0 T3 T...• Se pueden usar calculadora y material de dibujo. No está permitido compartir las...
11
PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (18/19) Dpto. Electrónica, Automática e Informática Industrial Escuela Técnica Superior de Ingeniería y Diseño Industrial de Madrid Normas de examen • El alumno debe dejar bien visible sobre la mesa una identificación válida (carné de la escuela, DNI…). • No se pueden usar libros ni apuntes y, por tanto, una vez empezado el examen, no deben quedar a la vista. • Se pueden usar calculadora y material de dibujo. No está permitido compartir las herramientas de cálculo. • Los ejercicios han de realizarse en orden y se recogerán al finalizar el tiempo asignado a cada uno de ellos. • No se admitirán soluciones hechas a lápiz. La tinta roja sólo podrá usarse para las gráficas. Ejercicio 1 (3 puntos, 40 minutos) En el rectificador trifásico controlado de la figura la inductancia es lo suficientemente grande para considerar que la corriente i0 en régimen permanente es constante. Se pide determinar de forma razonada y justificada, representando las formas de onda en la plantilla adjunta: 1. Forma de onda de la tensión v0 y su valor medio, 0 . 2. Formas de onda de la corriente a través de cada tiristor ( iT1, iT2 e iT3) y su valor medio. 3. La potencia media disipada en cada tiristor suponiendo que las corrientes son las obtenidas en el apartado anterior. 4. El rendimiento del rectificador = 0 0 0 0 ⁄ . 5. Forma de onda de la tensión ánodo-cátodo del tiristor T1, vT1, y sus valores máximos en bloqueo directo e inverso. Nota: Considere que los tiristores son ideales salvo en el apartado 3, en el que cada tiristor puede modelarse con VT = 1,5 V y rT = 1 Ω. Datos: = 60º; f = 50 Hz; R = 10 Ω; va(t) = 325 sen(t) V Ejercicio 2 (3 puntos, 40 minutos) Para el convertidor con carga resistiva de la figura adjunta: 1. Dibuje los circuitos equivalentes para cada una de las fases por las que evoluciona el convertidor a lo largo de un ciclo. 2. Dibuje las formas de onda de uR1, iR1, uX2, iX2, uD2 e iD2 durante al menos 40 ms para un ángulo de disparo α = 2π/3 rad. Indique en todas las gráficas los valores más significativos. 3. Deduzca la expresión que da la tensión eficaz de salida sobre la carga, UL, en función del ángulo de disparo, UL = f(α). 4. Calcule la corriente eficaz máxima que deben soportar los semiconductores para cualquier ángulo de disparo. Datos: R1 = 8,8 Ω; Ured = 220 V; f = 50 Hz + v 0 - i 0 R L i T1 i T2 i T3 + v T1 - T 1 T 2 T 3 v a v b v c
Transcript of 0 T3 T...• Se pueden usar calculadora y material de dibujo. No está permitido compartir las...

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (18/19)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Técnica Superior de Ingeniería y Diseño Industrial de Madrid
Normas de examen
• El alumno debe dejar bien visible sobre la mesa una identificación válida (carné de la escuela, DNI…).
• No se pueden usar libros ni apuntes y, por tanto, una vez empezado el examen, no deben quedar a la vista.
• Se pueden usar calculadora y material de dibujo. No está permitido compartir las herramientas de cálculo.
• Los ejercicios han de realizarse en orden y se recogerán al finalizar el tiempo asignado a cada uno de ellos.
• No se admitirán soluciones hechas a lápiz. La tinta roja sólo podrá usarse para las gráficas.
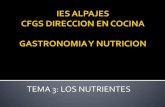
Ejercicio 1 (3 puntos, 40 minutos)
En el rectificador trifásico controlado de la figura la inductancia es lo
suficientemente grande para considerar que la corriente i0 en régimen
permanente es constante.
Se pide determinar de forma razonada y justificada, representando las formas
de onda en la plantilla adjunta:
1. Forma de onda de la tensión v0 y su valor medio, 0.
2. Formas de onda de la corriente a través de cada tiristor (iT1, iT2 e iT3) y su
valor medio.
3. La potencia media disipada en cada tiristor suponiendo que las corrientes
son las obtenidas en el apartado anterior.
4. El rendimiento del rectificador 𝜂 = 𝑉0𝐼0 𝑉0 𝑅𝑀𝑆𝐼0 𝑅𝑀𝑆⁄ .
5. Forma de onda de la tensión ánodo-cátodo del tiristor T1, vT1, y sus
valores máximos en bloqueo directo e inverso.
Nota: Considere que los tiristores son ideales salvo en el apartado 3, en el
que cada tiristor puede modelarse con VT = 1,5 V y rT = 1 Ω.
Datos: = 60º; f = 50 Hz; R = 10 Ω; va(t) = 325 sen(t) V
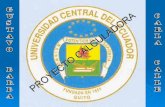
Ejercicio 2 (3 puntos, 40 minutos)
Para el convertidor con carga resistiva de la figura adjunta:
1. Dibuje los circuitos equivalentes para cada una de las fases por las que evoluciona el convertidor a
lo largo de un ciclo.
2. Dibuje las formas de onda de uR1, iR1, uX2, iX2, uD2 e iD2 durante al menos 40 ms para un ángulo de
disparo α = 2π/3 rad. Indique en todas las gráficas los valores más significativos.
3. Deduzca la expresión que da la tensión eficaz de salida sobre la carga, UL, en función del ángulo de
disparo, UL = f(α).
4. Calcule la corriente eficaz máxima que deben soportar los semiconductores para cualquier ángulo de
disparo.
Datos: R1 = 8,8 Ω; Ured = 220 V; f = 50 Hz
+
v0
-
i0
R
L
iT1
iT2
iT3
+ vT1 -
T1
T2
T3
va
vb
vc

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (18/19)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Técnica Superior de Ingeniería y Diseño Industrial de Madrid
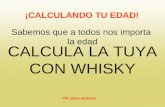
Ejercicio 3 (2 puntos, 20 minutos)
Dada la figura adjunta, responda a las siguientes cuestiones:
1. ¿Cuál es el tipo de interferencia o acoplamiento presente?
2. ¿A qué valor máximo (independiente de la frecuencia) podemos aproximar la señal de ruido (dada por el voltaje VR) en el
conductor 2?
3. ¿Qué soluciones podrían reducir el acoplamiento presente?
Datos: Capacitancias parásitas
C1T = 150 pF (conductor 1-tierra)
C2T = 150 pF (conductor 2-tierra)
C12 = 50pF (conductor 1-conductor 2)
Ejercicio 4 (2 puntos, 25 minutos)
Dados los circuitos A y B de la figura adjunta, se pide:
1. ¿Qué tipo de regulador (PD, PI, PID) implementa cada circuito? Obtenga de forma razonada las funciones de transferencia de cada
circuito regulador.
2. Indique el valor de los parámetros k, Tv (regulador PD) y Tn (regulador PI) en función de los componentes de los circuitos A y B
para cada regulador.
3. ¿Cómo podría implementar un regulador PID a partir de los circuitos A y B? Obtenga de forma razonada la función de
transferencia del regulador PID e identifique los parámetros k, Tv y Tn del mismo.
VR

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (18/19)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Técnica Superior de Ingeniería y Diseño Industrial de Madrid
Nombre y apellidos:
vT1
v0


PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (18/19)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Técnica Superior de Ingeniería y Diseño Industrial de Madrid
Anexo 1: Tablas de cuadripolos pasivos
A= Ganancia de tensión en circuito abierto; Y= Admitancia de transferencia en cortocircuito

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (17/18)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial de Madrid
Ejercicio 1 (3 puntos, 30 minutos)

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (17/18)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial de Madrid

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (17/18)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial de Madrid

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (17/18)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial de Madrid
Ejercicio 2 (3 puntos, 30 minutos)
1. Los circuitos equivalentes son:
0 ≤ θ < α
α ≤ θ < π
π ≤ θ < π + α
π + α ≤ θ < 2π
2. FF.OO. de uR1, iR1, uX2, iX2, uD2 e iD2 durante al menos 40 ms para un ángulo de disparo α = 2π/3 rad:
𝐹 = √2𝑈𝐹 = 311 V; 𝑢𝑅1(𝛼+) = 𝐹 sen α = 269,444 V; 𝑖𝑅1(𝛼+) = 𝐹 𝑅1⁄ sen α = 30,619 A
3. Tensión eficaz de salida sobre la carga, UL = f(α):
𝑈𝐿2(𝛼) =
1
2𝜋∫ 𝑢𝐿
2(𝜃) 𝑑𝜃2𝜋
0
=1
𝜋∫ 𝑢𝐿
2(𝜃) 𝑑𝜃𝜋
0
=1
𝜋∫ (𝐹 sen 𝜃)
2𝑑𝜃
π
𝛼
=𝐹
2
𝜋∫ (sen 𝜃)2 𝑑𝜃
π
𝛼
=𝐹
2
2𝜋∫ 1 − cos 2𝜃 𝑑𝜃
π
𝛼
𝑈𝐿2(𝛼) =
𝐹2
2𝜋[𝜃 −
sen 2𝜃
2]
𝛼
π
=𝐹
2
2𝜋(π − α +
sen 2𝛼
2)
UL(α) =UF
√2√1 −
α
π+
sen 2α
2π
4. El peor caso es para α = 0, ángulo para el que la tensión eficaz sobre la carga es máxima y cada semiconductor conduce un
semiciclo completo:
máx𝐼𝑠𝑒𝑚2 =
1
2π∫ isem
2(θ) dθ2π
0
=1
2π∫ iR1
2(θ) dθπ
0
=1
2π∫ (
uL(θ)
R1
)
2
dθπ
0
=1
2𝑅12
1
π∫ uL(θ)2 dθ
π
0
=1
2𝑅12 𝑈𝐹
2
máx𝐼𝑠𝑒𝑚 =𝑈𝐹
𝑅1√2=
220 V
8,8 Ω×√2=17,678 A
Time
0s 2ms 4ms 6ms 8ms 10ms 12ms 14ms 16ms 18ms 20ms 22ms 24ms 26ms 28ms 30ms 32ms 34ms 36ms 38ms 40ms
I(R1) I(X2:A) I(D2)
-40A
-20A
0A
20A
40A
SEL>>
V(R1:1,R1:2) V(X2:A,X2:K) V(D2:1,D2:2)
-200V
0V
200V
-350V
350V

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (17/18)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial de Madrid
Ejercicio 3
1. ¿Cuál es el tipo de interferencia o acoplamiento presente? (0,5 puntos)
Acoplamiento capacitivo.
2. ¿A qué valor máximo (independiente de la frecuencia) podemos aproximar la señal de ruido (dada por el voltaje VR) en el
conductor 2? (0,75 puntos)
𝑉𝑅 ≅𝐶12
𝐶12 + 𝐶2𝑇
𝑉1
𝑉𝑅 =50 pF
200 pF× 10 V = 2,5 V
3. ¿Qué soluciones podrían reducir el acoplamiento presente? (0,75 puntos)
• Separar los conductores para disminuir la capacitancia parásita C12.
• Apantallar el cable conductor 2 con el blindaje puesto a masa.
Ejercicio 4 (2 puntos, 25 minutos)
1. ¿Qué tipo de regulador (PD, PI, PID) implementa cada circuito? Obtenga de forma razonada las funciones de transferencia de cada
circuito regulador (1 punto).
Ambos circuitos tienen una configuración inversora, por lo que la función de transferencia será del tipo:
𝑉𝑜
𝑉𝑖
= −𝑌1
𝑌2
De las tablas de cuadripolos podemos obtener los coeficientes Y1 e Y2 para cada circuito.
Para el CIRCUITO A:
𝑌1 = −1
𝑅1
𝑌2 = −𝑠𝐶1
1 + 𝑠𝐶1𝑅2
𝑉𝑜
𝑉𝑖
= −𝑌1
𝑌2
= −𝑅2
𝑅1
(1 + 𝑠𝐶1𝑅2)
𝑠𝐶1𝑅2
Es un regulador PI, ya que la función de transferencia es del tipo:
𝑉𝑜
𝑉𝑖
= 𝑘1 + 𝑇𝑛𝑠
𝑇𝑛𝑠

PRIMER CONTROL DE SISTEMAS ELECTRÓNICOS INDUSTRIALES (17/18)
Dpto. Electrónica, Automática e Informática Industrial
Escuela Universitaria de Ingeniería Técnica Industrial de Madrid
Para el CIRCUITO B:
𝑌1 = −1 + 𝑠𝑅3𝐶2
𝑅3
𝑌2 = −1
𝑅4
𝑉𝑜
𝑉𝑖
= −𝑌1
𝑌2
= −𝑅4
𝑅3
(1 + 𝑠𝑅3𝐶2)
Es un regulador PD, ya que la función de transferencia es del tipo:
𝑉𝑜
𝑉𝑖
= 𝑘(1 + 𝑇𝑣𝑠)
2. Indique el valor de los parámetros K, Tv (regulador PD) y Tn (regulador PI) en función de los componentes de los circuitos A y B
para cada regulador (1 punto).
Para CIRCUITO A:
𝑘𝑛 =𝑅2
𝑅1
𝑇𝑛 = 𝐶1𝑅2
Para CIRCUITO B
𝑘𝑣 =𝑅4
𝑅3
𝑇𝑣 = 𝑅3𝐶2
3. ¿Cómo podría implementar un regulador PID a partir de los circuitos A y B? Obtenga de forma razonada la función de
transferencia del regulador PID e identifique los parámetros K, Tv y Tn del mismo (1 punto).
Conectando en cascada ambos circuitos tenemos la función de transferencia del PID cuando Tv<<Tn:
𝑉𝑜
𝑉𝑖
= 𝑘(1 + 𝑇𝑣𝑠) (1 + 𝑇𝑛𝑠
𝑇𝑛𝑠)
𝑘 =𝑅2
𝑅1
𝑅4
𝑅3
𝑇𝑛 = 𝐶1𝑅2
𝑇𝑣 = 𝑅3𝐶2