






Idiomas
Páginas
Jurídico


1
PRUEBAS ACCESO CICLO FORMATIVO GRADO SUPERIOR
- TECNOLOGÍA INDUSTRIAL -
BLOQUE 4: Máquinas. Elementos de máquinas.
1. CONCEPTOS FÍSICOS FUNDAMENTALES.
� Trabajo : En mecánica clásica, el trabajo que realiza una fuerza se define como el producto de
ésta por el camino que recorre su punto de aplicación y por el coseno del ángulo que forman
la una con el otro. El trabajo es una magnitud física escalar que representa con la letra W y se
expresa en unidades de energía, esto es en julios en el Sistema Internacional de Unidades
(S.I.).
= F · d · cosα (N m = Julios) (producto escalar de los dos vectores)
Trabajo en rotación: W = M · θ (momento o par por ángulo de rotación)
Trabajo en fluidos: W = p · S · d = p · ∆V
� Energía : capacidad de realizar un trabajo.
Energía potencial: Ep = m ·g · h
Energía mecánica (potencial + cinética): En un sistema se cumple que
W = ∆Emec (W → trabajo externo realizado o recibido por el sistema)
ECtotal = ½ · m · v2 (movimiento de translación) + ½· I · w2 (movimiento de rotación)
Energía potencial elástica: Ep = ½ · K · x2 (x = longitud natural – longitud comprimido)
� Potencia : Es la cantidad de trabajo efectuado por unidad de tiempo.
P = W / t (Julios/s = vatios)
Potencia en desplazamientos lineales a velocidad constante: P = F · v
Potencia en rotación (motores): P = M · w (velocidad en rad/s)
Potencia en fluidos (bombas): P = p · Q
Potencia eléctrica: P = V · I
� Rendimiento : Expresa la eficiencia de un dispositivo, máquina, ciclo termodinámico, etc.
η = Wrealizado / Wrecibido = Potencia útil / Potencia absorbida
� Velocidad lineal : Velocidad de un móvil que se desplaza con una trayectoria rectilínea. Es
una magnitud vectorial, ya que está determinada por el vector desplazamiento.
� Velocidad angular : es una medida de la velocidad de rotación. Se la define como el ángulo
girado por unidad de tiempo y se la designa mediante la letra griega w. Su unidad en el S.I es
el radián por segundo (rad/s). También se suele dar en r.p.m. (revoluciones por minuto).
� Par motor : es el momento de fuerza que ejerce un motor sobre el eje de transmisión de

2
potencia.
� Momento de inercia : es una medida de la inercia rotacional de un cuerpo. Más
concretamente el momento de inercia es una magnitud escalar que refleja la distribución de
masas de un cuerpo o sistema de partículas en rotación, respecto al eje de giro.
2. PRINCIPIOS DE LA TERMODINÁMICA.
La termodinámica es la parte de la física que estudia los fenómenos en los que intervienen los
conceptos de temperatura y calor, y sus relaciones con el trabajo mecánico y otras formas de
energía.
También podemos decir que la termodinámica nace para explicar los procesos de intercambio de
masa y energía térmica entre sistemas térmicos diferentes. Para tener un mayor manejo
especificaremos que calor significa "energía en tránsito" y dinámica se refiere al "movimiento", por lo
que, en esencia, la termodinámica estudia la circulación de la energía y cómo la energía infunde
movimiento.
El estado de un sistema termodinámico en equilibrio puede describirse mediante propiedades que
se pueden medir, como la temperatura, la presión o el volumen, que se conocen como variables
termodinámicas.
Históricamente, la termodinámica se desarrolló a partir de la necesidad de aumentar la eficiencia
de las primeras máquinas de vapor.
� Calor : energía calorífica (1 J = 0,24 cal; 1cal =4,18 J). Energía en tránsito.
� Energía calorífica de un combustible : Q = m · Pc (masa x poder calorífico).
� Energía calorífica aportada o desprendida al variar Tª: Q = m · Ce · ∆T
� Calor específico (Ce): calor que es necesario aportar a 1 gr de cuerpo para que varíe 1 º C su
temperatura). Ceagua=1cal/gºC.
� Temperatura : su variación nos permite conocer la variación de energía interna de un sistema.
En el S.I. se mide en Kelvin K = 273 + ºC.
� Ecuación general de los gases perfectos : P · V = n · R · T ó P · V / T = cte. Siendo R la
constante de los gases perfectos.
Primer principio de la termodinámica
Básicamente, dice que hay dos formas de variar o modificar la energía interna de un sistema, o lo
que es lo mismo, un sistema intercambia energía con el exterior de dos maneras diferentes:
� En forma de calor, cuando existe una diferencia de temperatura
� En forma de trabajo.
También se puede interpretar así: el calor
suministrado se emplea en producir trabajo y en

3
aumentar la energía interna de un sistema.
Así, el primer principio se resume en una expresión (Q → calor, W → trabajo)
Q = ∆U + W → ∆U = Q - W
U: energía interna (debida a la
energía química y la energía cinética
de las partículas)
Q: calor absorbido es positivo, cedido
es negativo.
W: trabajo realizado (expansión) es positivo, aportado al sistema (compresión) negativo
Segundo principio de la termodinámica
Se puede enunciar de muchas formas según la situación, pero veamos su definición aplicado a
un motor térmico. Según este principio, el calor se intercambia de forma natural y espontánea de un
foco de calor más caliente (T1) a otro foco más frío (a temperatura T2).
Pues bien, una máquina cíclica que actúa entre dos
focos a distintas temperaturas absorbe calor del foco caliente
para convertir una parte en trabajo y el resto pasa al foco frío.
Cuanto menor sea el intercambio del calor del foco caliente al
frío, más cantidad de calor se transforma en trabajo. En una
máquina ideal, el calor cedido por el foco caliente (Q1) se
transformaría totalmente en trabajo. Pero en la realidad es
imposible que todo el calor absorbido por un sistema se convierta en trabajo, una parte se cede a un
foco frío.
Con lo cual, en toda transformación cíclica de un sistema W = Qc – Qf.
Transformaciones termodinámicas básicas
� Transformación isoterma (T = cte.) ⇒ ∆U = 0 → Q = W
- Relación P-V-T: P1 · V1 = P2 · V2
- Calor: Q = n · R· T · ln(V2/V1) = P · V · ln(V2/V1)
- Trabajo: W = n · R· T · ln(V2/V1) = P · V · ln(V2/V1)
� Transformación isocora (V = cte.)
- Relación P-V-T: P1 / T1 = P2 / T2
- Calor: Q = n · Cv · (T2 – T1); siendo Cv el calor específico a volumen
constante y n el número de moles del gas.
- Trabajo: W = p · ∆V = 0
� Transformación isobara (P = cte.)
- Relación P-V-T: V1 / T1 = V2 / T2

4
- Calor: Q = n · Cp · (T2 – T1); siendo Cp el calor específico a presión
constante y n el número de moles del gas.
- Trabajo: W = n · R ·(T2 – T1)
� Transformación adiabática (Q = cte.)
Se designa como proceso adiabático a aquel en el cual el sistema no
intercambia calor con su entorno. Un proceso adiabático que es además
reversible se conoce como proceso isentrópico .
- Relación P-V-T: P1 · V1α = P2 · V2
α ; T1 · V1α-1 = T2 · V2
α-1
- Calor: Q = 0.
- Trabajo: W = n · Cv ·(T2 – T1)
3. ELEMENTOS DE MÁQUINAS Y SISTEMAS.
Un mecanismo es un conjunto de elementos conectados entre sí por medio de articulaciones
móviles y cuya misión es: transformar una velocidad en otra velocidad, transformar una fuerza en otra
fuerza, transformar una trayectoria en otra diferente o transformar un tipo de energía en otro tipo
distinto.
Según el número de elementos los mecanismos se pueden clasificar en:
� Simples , si tienen dos elementos de enlace.
� Complejos , si tiene más elementos de enlace.
Un sistema mecánico o máquina es una combinación de mecanismos que transforma
velocidades, trayectorias, fuerzas, o energías mediante una serie de transformaciones intermedias.
Los movimientos que pueden describir un elemento de un mecanismo son:
� Movimiento rectilíneo : en un único sentido.
� Movimiento alternativo : o movimiento de vaivén.
� Movimiento circular o de rotación.
Los mecanismos y los sistemas mecánicos constan de los siguientes elementos básicos:
� Sistema motriz o sistema de entrada : recibe la energía de entrada, la cual será
transformada o transmitida.
� Sistema transmisor : medio que permite modificar la energía o el movimiento proporcionado
por el sistema motriz.
� Sistema receptor o sistema de salida : con la salida que le proporciona el sistema transmisor
realiza un trabajo, que es el objetivo del sistema mecánico.
Los mecanismos pueden clasificar en dos grandes grupos:
a) Mecanismos de transmisión del movimiento : en este caso el mecanismo o sistema de
entrada es igual que el mecanismo o sistema de salida. En base a esto, podemos
5
encontrarnos dos tipos de sistemas:
� Mecanismos de transmisión lineal : son aquellos que convierten un movimiento rectilíneo
en otro movimiento rectilíneo (poleas, palancas, etc.).
� Mecanismos de transmisión circular : son aquellos que convierten un movimiento circular
(de rotación) en otro circular (transmisión por correas, por engranajes, por cadenas,…).
b) Mecanismos de transformación del movimiento : en este caso el mecanismo o sistema de
entrada y el de salida tienen distinto tipo de movimiento. En base a esto, podemos
encontrarnos dos tipos de sistemas:
� Mecanismos que transforman un movimiento circular en rectilíneo . Ejemplo de ello son
el torno, el husillo-tuerca o el piñón-cremallera.
� Mecanismos que transforman un movimiento circular en alternativo . Ejemplo de ello son
la biela-manivela, leva-seguidor…
3.1. MECANISMOS DE TRANSMISIÓN DEL MOVIMIENTO.
A) Mecanismos de transmisión lineal.
Estos mecanismos “transforman” movimientos rectilíneos en rectilíneos.
El principio en el que se basan estos mecanismos es el de la transformación de fuerzas, de modo
que la fuerza necesaria para la realización de una acción, sea menor que la precisa, si utilizamos este
mecanismo. Ejemplos de ello son la palanca y la polea .
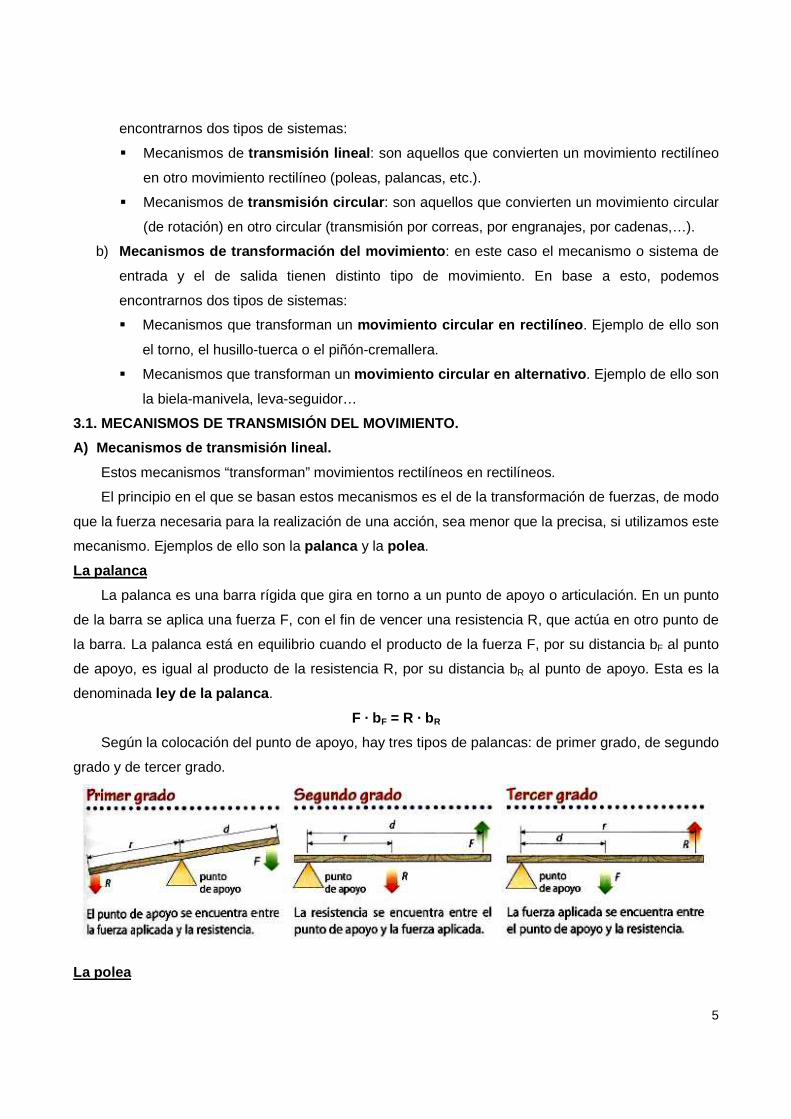
La palanca
La palanca es una barra rígida que gira en torno a un punto de apoyo o articulación. En un punto
de la barra se aplica una fuerza F, con el fin de vencer una resistencia R, que actúa en otro punto de
la barra. La palanca está en equilibrio cuando el producto de la fuerza F, por su distancia bF al punto
de apoyo, es igual al producto de la resistencia R, por su distancia bR al punto de apoyo. Esta es la
denominada ley de la palanca .
F · bF = R · bR
Según la colocación del punto de apoyo, hay tres tipos de palancas: de primer grado, de segundo
grado y de tercer grado.
La polea
6
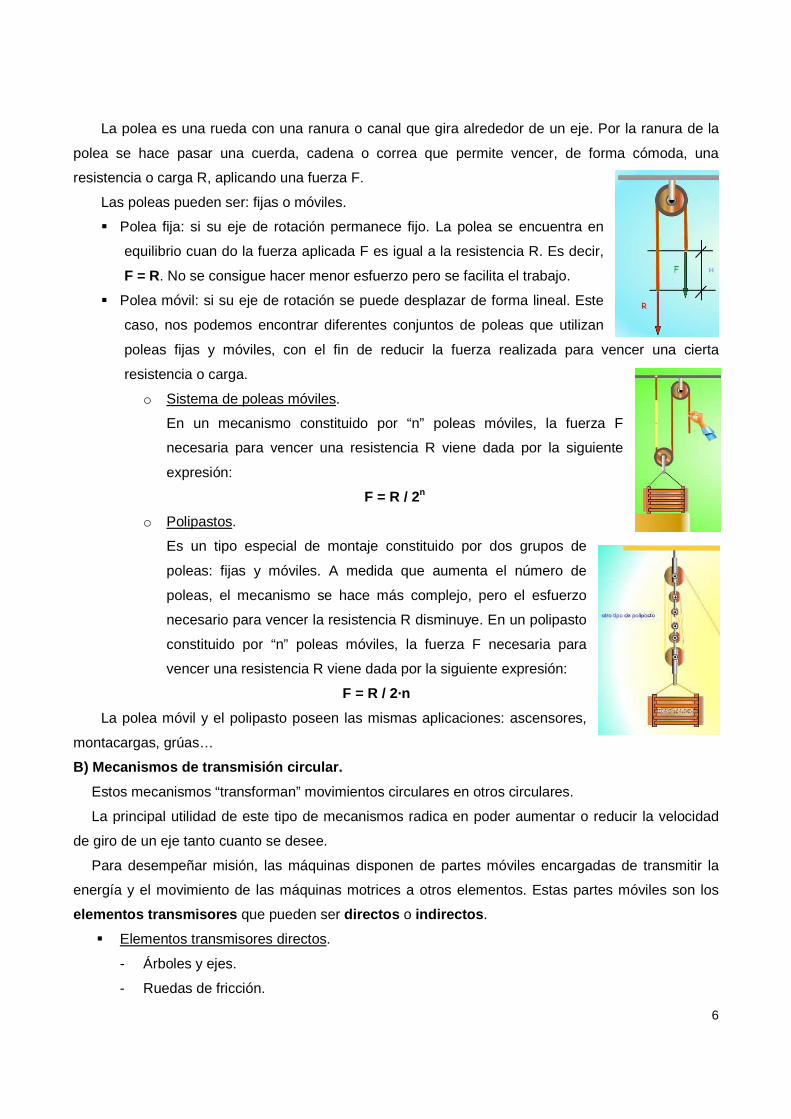
La polea es una rueda con una ranura o canal que gira alrededor de un eje. Por la ranura de la
polea se hace pasar una cuerda, cadena o correa que permite vencer, de forma cómoda, una
resistencia o carga R, aplicando una fuerza F.
Las poleas pueden ser: fijas o móviles.
� Polea fija: si su eje de rotación permanece fijo. La polea se encuentra en
equilibrio cuan do la fuerza aplicada F es igual a la resistencia R. Es decir,
F = R. No se consigue hacer menor esfuerzo pero se facilita el trabajo.
� Polea móvil: si su eje de rotación se puede desplazar de forma lineal. Este
caso, nos podemos encontrar diferentes conjuntos de poleas que utilizan
poleas fijas y móviles, con el fin de reducir la fuerza realizada para vencer una cierta
resistencia o carga.
o Sistema de poleas móviles.
En un mecanismo constituido por “n” poleas móviles, la fuerza F
necesaria para vencer una resistencia R viene dada por la siguiente
expresión:
F = R / 2n
o Polipastos.
Es un tipo especial de montaje constituido por dos grupos de
poleas: fijas y móviles. A medida que aumenta el número de
poleas, el mecanismo se hace más complejo, pero el esfuerzo
necesario para vencer la resistencia R disminuye. En un polipasto
constituido por “n” poleas móviles, la fuerza F necesaria para
vencer una resistencia R viene dada por la siguiente expresión:
F = R / 2·n
La polea móvil y el polipasto poseen las mismas aplicaciones: ascensores,
montacargas, grúas…
B) Mecanismos de transmisión circular.
Estos mecanismos “transforman” movimientos circulares en otros circulares.
La principal utilidad de este tipo de mecanismos radica en poder aumentar o reducir la velocidad
de giro de un eje tanto cuanto se desee.
Para desempeñar misión, las máquinas disponen de partes móviles encargadas de transmitir la
energía y el movimiento de las máquinas motrices a otros elementos. Estas partes móviles son los
elementos transmisores que pueden ser directos o indirectos .
� Elementos transmisores directos.
- Árboles y ejes.
- Ruedas de fricción.
7
- Engranajes.
- Tornillo sin fin.
� Elementos transmisores indirectos.
- Poleas con correa.
- Cadenas.
Árboles y ejes
Un eje es un elemento, normalmente cilíndrico, que gira por sí mismo y sirve para sostener
piezas.
Atendiendo a la forma de trabajo, los ejes pueden ser:
� Ejes fijos : permiten el giro de los elementos mecánicos situados sobre ellos, pero no giran
solidariamente con ellos, es decir, los elementos mecánicos giran libremente sobre ellos.
� Ejes móviles : pueden girar solidariamente con algunos de los elementos situados sobre ellos.
Un árbol (también llamado árbol de
transmisión ) es un elemento de una máquina,
cilíndrico o no, sobre el que se montan
diferentes piezas mecánicas, por ejemplo,
poleas o engranajes, a los que transmite
potencia (fuerza). Los árboles giran siempre
junto a los elementos soportados. Como
consecuencia de esto, están sometidos fundamentalmente a esfuerzos de torsión y flexión.
A veces es necesario utilizar un elemento que permite unir dos ejes, que están separados una
cierta distancia, para transmitir movimiento de giro entre ambos. Dependiendo del tipo de
acoplamiento, éstos se clasifican en:
� Acoplamiento rígido: los elementos están colocados en la misma línea y no sufren variación
de posición durante el funcionamiento. Se unen de una forma rígida mediante bridas o
platillos.
� Acoplamiento móvil: permite una cierta inclinación entre los ejes unidos (los ejes no están
alineados en algún momento del funcionamiento. Se unen mediante juntas o acoplamientos.
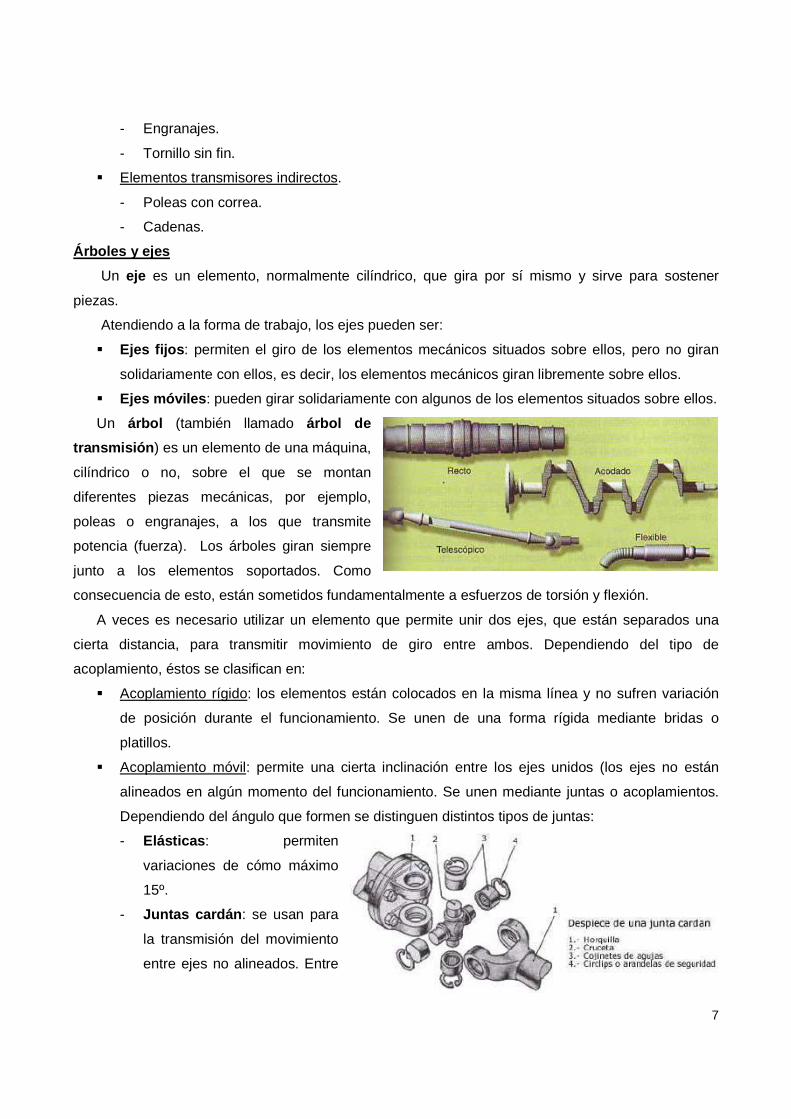
Dependiendo del ángulo que formen se distinguen distintos tipos de juntas:
- Elásticas : permiten
variaciones de cómo máximo
15º.
- Juntas cardán : se usan para
la transmisión del movimiento
entre ejes no alineados. Entre
8
los extremos de los ejes se colocan unas horquillas que se unen mediante una cruceta.
Para permitir el giro se colocan rodamientos.
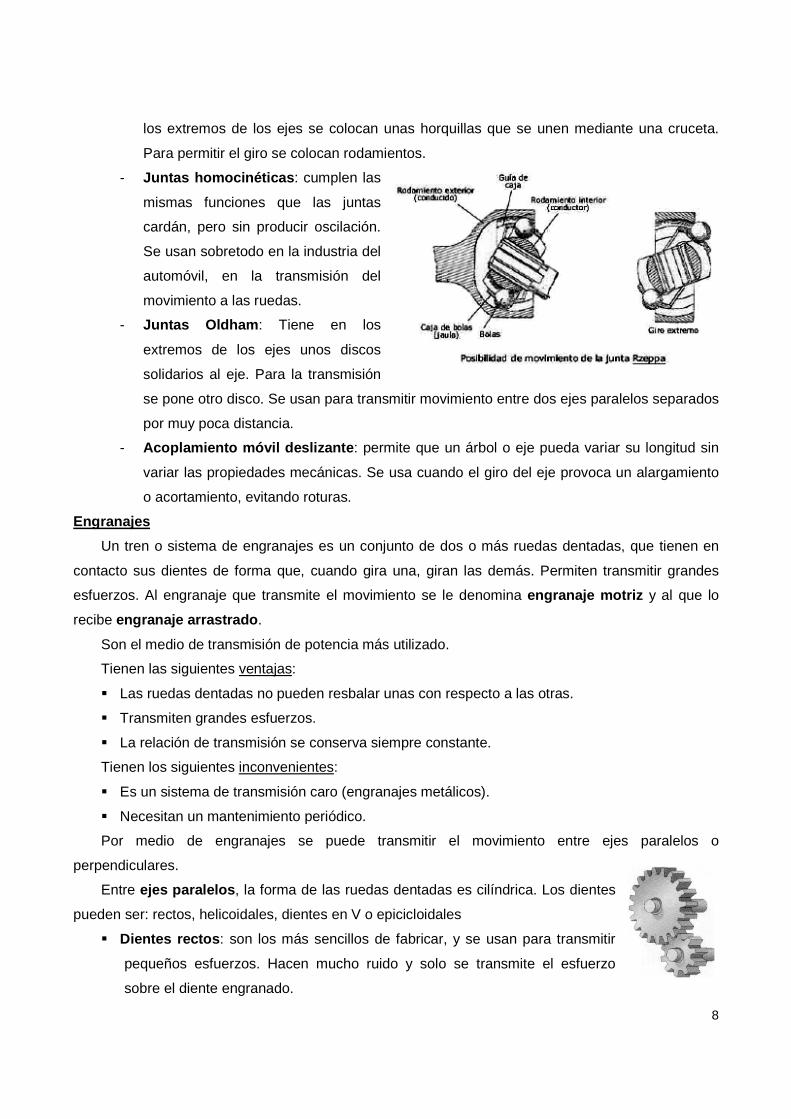
- Juntas homocinéticas : cumplen las
mismas funciones que las juntas
cardán, pero sin producir oscilación.
Se usan sobretodo en la industria del
automóvil, en la transmisión del
movimiento a las ruedas.
- Juntas Oldham : Tiene en los
extremos de los ejes unos discos
solidarios al eje. Para la transmisión
se pone otro disco. Se usan para transmitir movimiento entre dos ejes paralelos separados
por muy poca distancia.
- Acoplamiento móvil deslizante : permite que un árbol o eje pueda variar su longitud sin
variar las propiedades mecánicas. Se usa cuando el giro del eje provoca un alargamiento
o acortamiento, evitando roturas.
Engranajes
Un tren o sistema de engranajes es un conjunto de dos o más ruedas dentadas, que tienen en
contacto sus dientes de forma que, cuando gira una, giran las demás. Permiten transmitir grandes
esfuerzos. Al engranaje que transmite el movimiento se le denomina engranaje motriz y al que lo
recibe engranaje arrastrado .
Son el medio de transmisión de potencia más utilizado.
Tienen las siguientes ventajas:
� Las ruedas dentadas no pueden resbalar unas con respecto a las otras.
� Transmiten grandes esfuerzos.
� La relación de transmisión se conserva siempre constante.
Tienen los siguientes inconvenientes:
� Es un sistema de transmisión caro (engranajes metálicos).
� Necesitan un mantenimiento periódico.
Por medio de engranajes se puede transmitir el movimiento entre ejes paralelos o
perpendiculares.
Entre ejes paralelos , la forma de las ruedas dentadas es cilíndrica. Los dientes
pueden ser: rectos, helicoidales, dientes en V o epicicloidales
� Dientes rectos : son los más sencillos de fabricar, y se usan para transmitir
pequeños esfuerzos. Hacen mucho ruido y solo se transmite el esfuerzo
sobre el diente engranado.

9
� Dientes helicoidales : varios dientes están engranados a la vez, por lo que
la posibilidad de rotura es menor. Además, disminuye el ruido durante el
funcionamiento.
� Dientes en V : tiene las mismas propiedades que los helicoidales, pero más
eficientes.
� Engranajes epicicloidales : se componen de una corona dentada en el
interior, un piñón central llamado planetario y otros tres piñones más
pequeños que se denominan satélites.
La transmisión entre ejes perpendiculares puede realizarse de dos
formas: entre ejes que se cortan y entre ejes que se cruzan.
� Ejes que se cortan: suelen utilizarse engranajes cónicos de dientes
rectos y engranajes cónicos helicoidales.
� Ejes que se cruzan: suelen utilizarse tornillo sin fin, engranajes
helicoidales
Ambos tipos tiene las superficies de contacto
troncocónicas. Esta transmisión permite transferir esfuerzos
importantes pero, al mismo tiempo, se generan grandes
fuerzas axiales.
Dependiendo del número de dientes del engranaje motriz con respecto al arrastrado, la relación
de transmisión (i) del sistema variará, y con ella la velocidad de giro (n) y la fuerza de salida (F) del
sistema.
i = n 2 / n1 = Z1 / Z2
Donde:
n1 = es la velocidad de giro del engranaje motriz
n2 = es la velocidad de giro del engranaje arrastrado
Z1 = número de dientes del engranaje motriz
Z2 = número de dientes del engranaje arrastrado
Si i >1, el sistema será multiplicador de la velocidad. Para i <1, el sistema será reductor de
velocidad. En el caso de que i =1, la velocidad no variará. La velocidad de giro de salida será
inversamente proporcional a la fuerza de salida.
Si disponemos de dos o más arboles de transmisión provistos de diversos engranajes de modo
que al menos dos de ellos giren solidariamente sobre el mismo árbol, obtendremos un tren
compuesto de engranajes .
En este caso, la relación de transmisión total (iT) del tren compuesto de engranajes será igual al
producto de las relaciones de transmisión de los trenes simples de engranajes que lo formen.
iT = i1-2 · i3-4 · i5-6 = (Z1 / Z2) · (Z3 / Z4) · (Z5 / Z6) = n6 / n1

10
En este caso se cumple que n2 = n3 y que n4 = n5, ya que dichos engranajes al estar en el mismo
eje, girarán a la misma velocidad de giro.
Cuando los engranajes pueden desplazarse a lo largo de los ejes para formar diferentes
engranajes simples, se consigue que varíe la velocidad final del árbol de salida manteniendo
constante la velocidad del árbol motor. Este dispositivo se le conoce con el nombre de caja de
velocidades y se utiliza en vehículos y máquinas herramientas.
Tornillo sin fin – corona
El tornillo sin fin es una pieza cilíndrica que dispone de uno o
varios dientes arrollados de forma helicoidal.
La corona es un engranaje de dientes helicoidales cuyo ángulo de
inclinación coincide con el de los dientes del tornillo sin fin.
El conjunto transmite movimiento de rotación entre dos ejes
perpendiculares, de manera que el tornillo sin fin actúa siempre como
elemento motriz y la corona como elemento arrastrado o conducido. Es
decir, si intentamos girar la corona, el tornillo sin fin no se mueve, el sistema queda bloqueado.
Se consigue una drástica reducción de la velocidad de salida y como consecuencia de ello, un
aumento del momento resultante de salida.
La relación de transmisión (i) para este sistema es la siguiente:
i = n 2 / n1 = Z1 / Z2
Donde Z1 = nº de dientes del tornillo sin fin y Z2 = número de dientes de la corona.
Los tornillos sin fin pueden estar formados por varios dientes, aunque lo más normal es que sólo
tengan uno. Esto da idea de la gran reducción de velocidad que se puede hacer con este sistema.
Polea con correa
Una polea es simplemente una rueda acanalada. Si utilizamos
dos o más poleas y las comunicamos mediante una correa ,
podemos transmitir movimiento. El movimiento se produce por la
fricción entre la correa y la polea.
Las características principales de un sistema de poleas son:
POLEA MOTRIZ
CORREA
POLEA CONDUCIDA

11
� Dos poleas unidas por una correa giran en el mismo sentido. Si queremos que giren en sentidos
opuestos, deberemos cruzar la correa.
� Se puede transmitir movimiento a una distancia más o menos lejana. La transmisión no es directa,
sino que se hace a través de una correa. Si ésta falla, no hay transmisión.
� Es un sistema silencioso, sencillo y económico, para velocidades y esfuerzos pequeños.
A la polea que crea el movimiento se le llama polea motriz, y a la que se ve arrastrada por ella,
polea conducida.
La relación de transmisión (i) para un sistema de poleas es:
i = n 2 / n1 = D1 / D2
Donde D1 es el diámetro de la polea motriz y D2 es el diámetro de la polea
conducida.
En estos sistemas se puede aumentar o disminuir la velocidad de giro (n)
y el momento torsor (M), en función de los diámetros que tengan las poleas.
Basándonos en esta idea, podemos encontrarnos con dos casos
prácticos:
� La polea conducida gira a menor velocidad que la polea motriz. Este
es un sistema de poleas reductor de la velocidad. (i <1; M1 > M2)
� La polea conducida gira a mayor velocidad que la polea motriz. Este es
un sistema de poleas multiplicador de la velocidad. (i >1; M1 < M2)
Los trenes de poleas compuestos son la unión de varios sistemas de poleas simples. Para unir
varios sistemas de poleas simples es necesario situar en un mismo eje poleas de un sistema y de
otro. Dichos poleas al estar en el mismo eje girarán a la misma velocidad de giro.
Lo mismo que sucedía en los sistemas de poleas simples, éstos se pueden utilizar para reducir o
multiplicar velocidades de giro o momentos torsores, pero en este caso, los incrementos y las
reducciones serán mucho más grandes.
La relación de transmisión total (iT) para el tren de poleas, será el producto de las relaciones de
transmisión de cada uno de los sistemas de poleas simples que formen dicho tren de poleas.
iT = i1-2 · i3-4 · i5-6 = (D1 / D2) · (D3 / D4) · (D5 / D6) = n6 / n1
En este caso se cumple que n2 = n3 y que n4 = n5, ya que dichas poleas al estar en el mismo eje.
Transmisión por cadena o correa dentada

12
Este sistema sirve para transmitir movimiento entre ejes que
están muy separados. Está formado por dos ruedas dentadas que
se comunican mediante una cadena o una correa dentada tensa.
Este mecanismo es una mezcla entre la transmisión con poleas y la
transmisión por engranajes.
Cuando es fundamental que no se produzca un resbalamiento,
y se necesita un mecanismo articulado muy fuerte, se puede utilizar
este sistema. El uso más conocido de este sistema es la bicicleta.
Tiene un inconveniente, que es su mantenimiento, en el caso
de utilizar cadena, ya que hay que engrasar la cadena cada cierto
tiempo.
En el caso de utilizar una correa dentada para la transmisión,
ésta tiene su interior dentado (semejante a los piñones). Así se evita
la necesidad de lubricación, se eliminan los ruidos y nos da la posibilidad de trabajar a altas
velocidades.
Lo mismo que las poleas y los engranajes dependiendo del número de dientes de las ruedas
dentadas, se podrá aumentar o disminuir la velocidad y la fuerza de torsión del sistema.
La relación de transmisión (i) para un sistema de cadenas y piñones es la misma que para un
sistema de engranajes:
i = n 2 / n1 = Z1 / Z2
La relación de transmisión total (iT) de un tren de transmisión por cadenas será igual a la relación
de transmisión total de un tren compuesto de engranajes.
3.2. MECANISMOS DE TRANSFORMACIÓN DEL MOVIMIENTO.
Los mecanismos de transformación son los cambian el tipo de movimiento, de lineal a circular, de
alternativo a circular, o a la inversa. En los mecanismos que vamos a describir a continuación, el
movimiento de entrada es diferente al movimiento de salida. Los más importantes son: husillo-tuerca,
piñón-cremallera, biela-manivela, cigüeñal-biela y leva-seguidor o excéntrica-leva.
A) Mecanismos que transforman movimientos de rotaci ón en movimientos rectilíneos.
Husillo-tuerca
Está compuesto de un eje roscado (husillo o tornillo) y una
tuerca (o agujero roscado) con la misma rosca que el eje. Si se gira
la tuerca, esta se desplaza linealmente sobre el husillo; y al revés, si
giro el husillo, también se desplaza la tuerca.
Permite convertir un movimiento giratorio en uno lineal continuo. Además de permitir la
conversión de un movimiento rotativo en uno lineal, tiene la tremenda ventaja de que en cada vuelta

13
solo avanza la distancia que tiene de separación entre filetes (paso de rosca) por lo que la fuerza de
apriete (longitudinal) es muy grande.
Ejemplos de aplicación es el tornillo de banco, un gato de automóvil, un taburete, etc.
Piñón-cremallera
Este mecanismo permite transformar un movimiento giratorio en otro
lineal. El sistema consiste en un engranaje, llamado piñón , que al girar
arrastra los dientes de una barra dentada, llamada cremallera .
El sistema se puede invertir, es decir, si la cremallera se desplaza hace
girar al piñón. Las velocidades lineales de ambos elementos deben ser
iguales. La velocidad de avance de la cremallera se expresa mediante la
siguiente ecuación:
v = p · Z · n
Donde p es el paso o distancia entre dos dientes consecutivos, Z es el número de dientes del
piñón, y n, el número de vueltas por minuto que realiza este.
Es muy apreciado para conseguir movimientos lineales de precisión (caso de microscopios u otros
instrumentos ópticos como retroproyectores).
Algunas aplicaciones muy usuales son: movimiento de puertas automáticas de garaje;
desplazamiento del cabezal de los taladros sensitivos, movimiento de archivadores móviles
empleados en farmacias o bibliotecas, cerraduras...
B) Mecanismos que transforman movimientos de rotaci ón en movimientos alternativos.
Biela-manivela
Es un mecanismo compuesto por dos barras articuladas, de
forma que cuando una gira la otra se desplaza por una guía. La
barra que gira se llama manivela , y la otra biela . Este sistema
transforma un movimiento circular en un movimiento lineal
alternativo o de vaivén.
La amplitud del movimiento del émbolo (pistón) se
denomina carrera y viene determinado por el diámetro de giro
del eje excéntrico al que está conectada la cabeza de la biela.
Los puntos extremos del recorrido son el PMS y el PMI.
Un movimiento igual se puede conseguir sustituyendo la
manivela por una excéntrica . La excéntrica es una rueda que tiene
una barra rígida (biela) unida en un punto de su perímetro.
Este mecanismo tuvo una importancia decisiva en el desarrollo
de la máquina de vapor. En la actualidad se utiliza también en los motores de combustión y en
algunas máquinas como las de coser o la sierra de calar.

14
Cigüeñal-biela
El cigüeñal es un elemento que,
junto a la biela , transforma el
movimiento circular en alternativo, o
viceversa.
Consiste en un árbol acodado
(a) con unos muñones (m) y unas
muñequillas (n) donde se colocan
las bielas. Sobre cada una de las
muñequillas se inserta la cabeza de cada una de las bielas por medio de una pieza llamada
sombrerete.
En este caso, la biela actúa como elemento motriz y el cigüeñal como elemento conducido. El
otro extremo de la biela, llamado pie de la biela, está unido al émbolo , que realiza un movimiento
alternativo. El émbolo y el pie de la biela están unidos por una pieza llamada bulón.
El émbolo o pistón es un elemento móvil de forma cilíndrica que se desplaza en el interior del
cilindro .
Este mecanismo se emplea en los motores de combustión interna para generar el movimiento
giratorio a partir del alternativo de los pistones.
Leva-seguidor
La leva es uuna rueda ovalada que gira. Al girar, el perfil de
la leva, provoca la subida o la bajada de un seguidor , presionado
por un muelle.
Este mecanismo ppermite obtener un movimiento lineal
alternativo, o uno oscilante, a partir de uno giratorio, pero no a la
inversa. Es decir, no es un mecanismo no reversible.
Existen diferentes tipos de mecanismos leva-seguidor
aparte del descrito anteriormente (leva de tambor, leva de
caracol).
La leva puede ser sustituida por una excéntrica , que
consiste en una pieza de forma diversa (suele ser una rueda)
en la que su eje de giro no coincide con su centro geométrico.
La distancia entre ambos ejes se denomina excentricidad. La excéntrica produce un movimiento
continuo leve en el seguidor, convirtiendo el movimiento circular de ésta en un movimiento alternativo
del seguidor.

15
Este mecanismo se emplea en: motores de automóviles (para la apertura y cierre de las
válvulas); programadores de lavadoras (para la apertura y cierre de los circuitos que gobiernan su
funcionamiento); cerraduras...
3.3. OTROS ELEMENTOS DE LAS MÁQUINAS.
Embragues
Es un elemento de las máquinas que se encarga de transmitir, a voluntad del operario, el
movimiento entre dos ejes alineados. Uno de ellos recibe el movimiento del eje motriz, y el otro
acoplado al eje de salida (eje conducido o resistente), lo transmite a los demás órganos. Cuando el
embrague produce la transmisión entre ambos ejes, se dice que está en la posición de embragado. Si
por el contrario no hay transmisión de movimiento entre los dos ejes, se dice que el embrague está en
posición de desembragado.
Los embragues pueden ser de tres tipos:
� Embrague de dientes.
� Embrague de fricción.
� Embrague hidráulico.
Embrague de dientes
En este tipo de embragues, los árboles que se van a acoplar llevan en sus
extremos dos piezas de dentadas que encajan la una con la otra.
Para poder embragar o desembragar, es necesario que ambos árboles
estén parados, ya que, si se intentan acoplar en movimiento, puede producirse
la rotura la rotura de los dientes.
Embrague de fricción
Consta de dos discos cuyas superficies son lisas y tienen un alto poder de
fricción cuando se ponen en contacto. Este rozamiento acopla ambos ejes,
igualando sus velocidades.
La fricción puede ser de metal con metal o de metal con ferodo (un tipo de
caucho).
El embragado o desembragado de los árboles de transmisión puede
realizarse en movimiento, siendo el arranque suave y continuo.
Una aplicación del embrague de fricción de disco, es la que se utiliza para
transmitir movimiento del motor de un automóvil a las ruedas de éste, a voluntad del conductor.
Frenos
Son mecanismos que reducen o paran el movimiento de uno o varios elementos de una máquina
cuando es necesario.
La energía mecánica se convierte en calorífica mediante la fricción entre dos piezas llamadas
frenos. Los frenos más utilizados son los de disco y los de tambor .

16
Frenos de disco
Se componen básicamente de un disco , colocado en el eje de giro, y
dos piezas o pastillas fijas que aplican sobre ambas caras del disco para
reducir su movimiento. Actualmente son el tipo de freno más utilizado en
los automóviles. Las pastillas están hechas de un material de fricción
llamado ferodo y están fijas al chasis.
Frenos de tambor
Constan de una pieza metálica cilíndrica que gira, denominada tambor ,
solidaria al árbol de giro (en la rueda del vehículo), y un conjunto de dos
zapatas que actúan sobre el tambor para que roce con él y producir su
frenado. Las zapatas están fijas al chasis.
Soportes
Los soportes son elementos sobre los que se apoyan los árboles y los
ejes de transmisión. Podemos clasificarlos en dos grupos: cojinetes de
fricción y rodamientos .
En los primeros, el eje o árbol que se apoya roza o fricciona al girar, por
lo que necesitan ser lubricados con aceite para facilitar el giro y reducir el
desgaste y el rozamiento.
Para evitar el rozamiento entre el
eje o árbol de transmisión y el
elemento de soporte, se usan los
rodamientos, formados por dos anillos
concéntricos entre los que se colocan
bolas o rodillos. El anillo interior se une o ajusta al árbol de transmisión, y el exterior, al elemento
soporte.
Tanto los cojinetes de fricción como los rodamientos se fabrican con materiales resistentes al
desgaste por rozamiento, como el bronce y otros materiales antifricción.
Mecanismos de acumulación de energía
Son elementos que se encarnan de almacenar o acumular una cierta cantidad de energía
mecánica para devolverla en el momento necesario.
Los más relevantes son:
� Muelles o resortes.
� Amortiguadores y ballestas.
Muelles o resortes
Son elementos elásticos que se deforman por la acción de una fuerza y que recuperan su forma
inicial cuando cesa la fuerza deformadora.

17
Son sometidos, de forma temporal, a esfuerzos interiores que lo deforman y, así, acumulan
energía potencial elástica. Cuando cesa la acción que los deforma, se libera la energía y produce un
trabajo.
Según el tipo de fuerza externa que se aplique, los muelles trabajan de diferentes formas:
� A compresión . El muelle se aplasta o
comprime, como en un sillón.
� A tracción . El muelle es estirado, como
en un somier.
� A torsión . El muelle es retorcido, como las pinzas de tender.
Las aplicaciones son muy diversas, en máquinas industriales y domésticas, juguetes de cuerda,
relojes, colchones, somieres, etc.
Los amortiguadores están formados por muelles
helicoidales de acero, y las ballestas , por láminas de acero de
gran elasticidad, apiladas de mayor a menor longitud y unidas por
el centro.
Las aplicaciones de ambos elementos (amortiguadores y
ballestas) forman parte del sistema de suspensión de los
vehículos.
4. MOTORES TÉRMICOS.
Un motor térmico es una máquina cíclica que tiene como misión transformar la energía térmica
en energía mecánica que sea directamente utilizable para producir trabajo.
Si el motor térmico utiliza combustible como fuente térmica, se denomina motor de combustión.
Los motores térmicos se pueden clasificar siguiendo diferentes criterios:
� Según el lugar donde se realiza el proceso de combustión:
• Combustión externa : La combustión se realiza fuera del motor (máquina de vapor y
turbinas). El calor desprendido es transmitido a un fluido intermedio, que produce la
energía mecánica. Ejemplo: la máquina de vapor, donde el fluido intermedio es el vapor de
agua y el lugar de la combustión es la caldera, que está fuera del motor.
• Combustión interna : La combustión se produce en una cámara interna del propio motor,
donde se generan los gases que producen la expansión que causa el trabajo. Ejemplo: el
motor de un automóvil, donde la cámara interna es cada cilindro y el fluido, en lugar de ser
vapor de agua, es una mezcla de un combustible con aire, que se quema en la cámara.
Existen distintos tipos de máquinas de combustión interna que se diferencian en el
combustible utilizado, en las condiciones de combustión y en el número de carreras que

18
efectúa el pistón en un ciclo completo.
- Encendido por compresión (MEC), el cual se produce debido a la presión (Diesel).
- Encendido provocado la inflamación (MEP), el cual se produce por una chispa que se
propaga a toda la cámara de combustión (Motores de explosión).
� Según el ciclo del motor podemos diferenciar entre los siguientes motores:
• Motores de cuatro tiempos (4T): se llaman así porque se necesitan cuatro etapas para
desarrollar el proceso o ciclo completo: admisión, compresión, expansión y escape. Se
aplican en automoción, equipos de energía eléctrica y en grandes equipos industriales.
• Motores de dos tiempos (2T) : en este caso, el ciclo se lleva a cabo en dos etapas:
admisión-compresión y expansión-escape. Los motores de los ciclomotores o las
motosierras llevan este tipo de motor.
� Según el tipo de movimiento del motor podemos tener dos grupos de motores térmicos:
• Alternativos : El fluido actúa sobre un pistón dotado de movimiento alternativo de subida y
bajada. Aplicaciones: máquinas de vapor, motor diesel, motor de explosión.
• Rotativo : el fluido actúa sobre pistones o turbinas que giran. Ejemplo: motor Wankel
(rotativo).
Si combinamos ambos criterios tenemos:
A. Motor alternativo de combustión interna : Es el más común
entre los vehículos. Se considera en este caso que el gas de
trabajo es ideal, aunque la realidad es que no es así. El gas
que entra a la cámara de combustión (cilíndrica) es una mezcla
de aire y combustible, mientras que el que sale, corresponde a
los gases tras la combustión de la mezcla anterior. Consta de
uno o más cilindros en los que se provoca la combustión del la
mezcla en cuyo interior se aloja un pistón que posee movimiento alternativo. Estos, se
clasifican en dos grupos:
� Motor de explosión o motor Otto. Motor convencional de gasolina.
� Motor de compresión o motor Diesel. Funciona con principios diferentes al de explosión y
suele funcionar con gasóleo.
B. Motor rotativo de combustión interna : el caso más singular es el
motor Wankel. En este caso, la cámara de combustión contiene una
pieza rotativa con forma triangular que gira solidariamente al rotor.
Por lo tanto, no posee ni cilindro ni pistones.
Nos centraremos en el motor alternativo de combustión interna.
4.1. MOTOR ALTERNATIVO DE COMBUSTIÓN INTERNA.

19
La parte estructural fundamental del motor la forman la bancada y el bloque del motor sobre los
que van montados los demás elementos del motor.
El cilindro es el recipiente por el
cual se desliza el pistón en movimiento
alternativo. El pistón tiene forma de
vaso invertido y está unido a la biela
mediante el bulón. Para conseguir el
cierre hermético entre el cilindro y el
pistón, éste está provisto de dos o tres
segmentos (aros), colocados en unas
ranuras de su parte superior. La biela
transmite el movimiento del pistón a la
manivela del cigüeñal , el cual está
soportado por cojinetes sobre la
bancada, transformando el movimiento
lineal en rotativo.
Sobre la parte superior del bloque del motor va montada la culata , que cierra los cilindros. El
espacio que queda entre el pistón y la culata es la cámara de combustión, el lugar donde se produce
la mezcla de combustión (gasolina o gasóleo) y comburente (aire).
La entrada del fluido de trabajo (gasolina, por ejemplo) y la salida de los gases de combustión se
realizan a través de las válvulas de admisión y escape respectivamente.
Estas válvulas están situadas en la culata, directamente sobre el cilindro, y su movimiento de
apertura y cierre está controlado por unos dispositivos mecánicos sincronizados.
Estas válvulas son accionadas mediante un árbol de levas ,
que es movido por el cigüeñal mediante algún sistema de
transmisión (cadena, correa o engranajes). El giro de las levas se
transforma en movimiento lineal de los taqués o empujadores, los
cuales actúan sobre el balancín que es el que abre la válvula.
Cuando la leva ha pasado, la fuerza de un muelle hace cerrar la
válvula ajustándola a su asiento.
4.1.1. MOTOR DE EXPLOSIÓN DE CUATRO TIEMPOS O MOTOR OTTO.
Este motor sigue el ciclo usado por primera vez por Nicolaus Otto en 1877 (ciclo de Otto). El
ciclo en cuestión consta de cuatro etapas o tiempos, dos adiabáticos y dos isocoros. Como ciclo que
es, es cerrado, es decir que se parte de unas condiciones iniciales de presión, temperatura y volumen
del gas y se regresa al punto de partida en las mismas condiciones y como motor, absorbe un calor
Q1 y cede un calor Q2 al exterior. La diferencia entre energía consumida y cedida se transforma en

20
trabajo.
� Primer tiempo. Admisión (0-1) : en esta etapa, el pistón
baja desde el PMS hasta el PMI arrastrado por la inercia del
cigüeñal, mientras se mantiene abierta la válvula de
admisión por la que entra, por aspiración, la mezcla del
combustible (gasolina) y aire en el cilindro. La válvula de
escape permanece cerrada. El gas sufre una expansión
isobárica (a presión constante, la atmosférica, Pamb) y a la
temperatura del exterior (temperatura ambiente). Al final de
la etapa, se cierra la válvula de admisión. Esta etapa
finaliza cuando el pistón alcanza el PMI. El cigüeñal ha
girado media vuelta (a girado 180º).
� Segundo tiempo. Compresión adiabática (1-2) (sin
intercambio de calor): en esta etapa, sube el pistón mientras
se mantienen cerradas las dos válvulas. En consecuencia el
gas se comprime de forma adiabática, elevándose la
temperatura de la mezcla. El gas, por lo tanto, sufre una
compresión adiabática que eleva la presión de la mezcla.
Esta compresión conlleva trabajo negativo. Esta etapa
finaliza cuando el pistón alcanza el PMS.
� Tercer tiempo. Explosión-expansión (2-3 y 3-4) : al alcanzar la mezcla la máxima compresión
(en el PMS), salta la chispa de la bujía y, por lo tanto, explosiona la mezcla del combustible y el
aire, lanzando de forma brusca el pistón hacia abajo. En este tiempo, ambas válvulas
permanecen cerradas. Este tiempo, como se observa en el diagrama consta de dos etapas: la
isocora (2-3) en la que ocurre la explosión, que implica un incremento brusco de presión y un
fuerte consumo de calor a volumen constante, un incremento tan rápido que no hay apenas
variación de volumen, aunque sí de temperatura. La siguiente etapa (3-4) es la expansión
adiabática (no se intercambia calor) en la que se efectúa trabajo positivo y tanto la presión como
la temperatura descienden. Esta etapa es la única que realmente genera trabajo. Esta etapa
finaliza cuando el pistón alcanza el PMI, que es cuando se abre la válvula de escapa.
� Cuarto tiempo. Escape (4-1 y 1-0) : Al principio de esta etapa se abre la válvula de escape. Los
gases de la combustión escapan al exterior, por lo que la presión y la temperatura bajan
bruscamente a volumen constante (etapa 4-1, isocora). El calor se libera en esta etapa, la
temperatura bajará hasta la del exterior. Al igual que la presión, que alcanzará la atmosférica.
Inmediatamente después comienza a subir el pistón a presión constante (la atmosférica), es decir,
la etapa (1-0) es una compresión isobárica. Este tiempo finaliza cuando el pistón alcanza el PMS

21
y llegado al él, se cierra la válvula de escape y se abre la válvula de admisión. El ciclo vuelve a
empezar.
Cada carrera completa corresponde a media vuelta
del cigüeñal. Por lo tanto para realizar el ciclo completo
se requieren dos revoluciones completas en el motor de
cuatro tiempos.
A continuación se muestra un gráfico del esquema
de un motor de explosión y de las partes principales de
este.
En el siguiente gráfico podemos observar cada una
de las cuatro etapas del motor de cuatro tiempos.
4.1.2. MOTOR DE EXPLOSIÓN DE DOS TIEMPOS.
Se trata de un motor térmico de combustión interna con encendido provocado y con un proceso
de dos tiempos también llamados carreras. Son motores más simples que los de cuatro tiempos.
Un motor de 2T no lleva válvulas de admisión ni de escape, sino dos conductos llamados
lumbreras de admisión y de escape .
La mezcla de combustible y de aire no entra directamente al cilindro, pasa primero por el cárter
donde es aspirada por la lumbrera de admisión y de aquí pasa al cilindro mediante la lumbrera de
transferencia .
Este motor consta de las mismas fases que el de 4T, pero lo realiza en dos carreras del pistón.
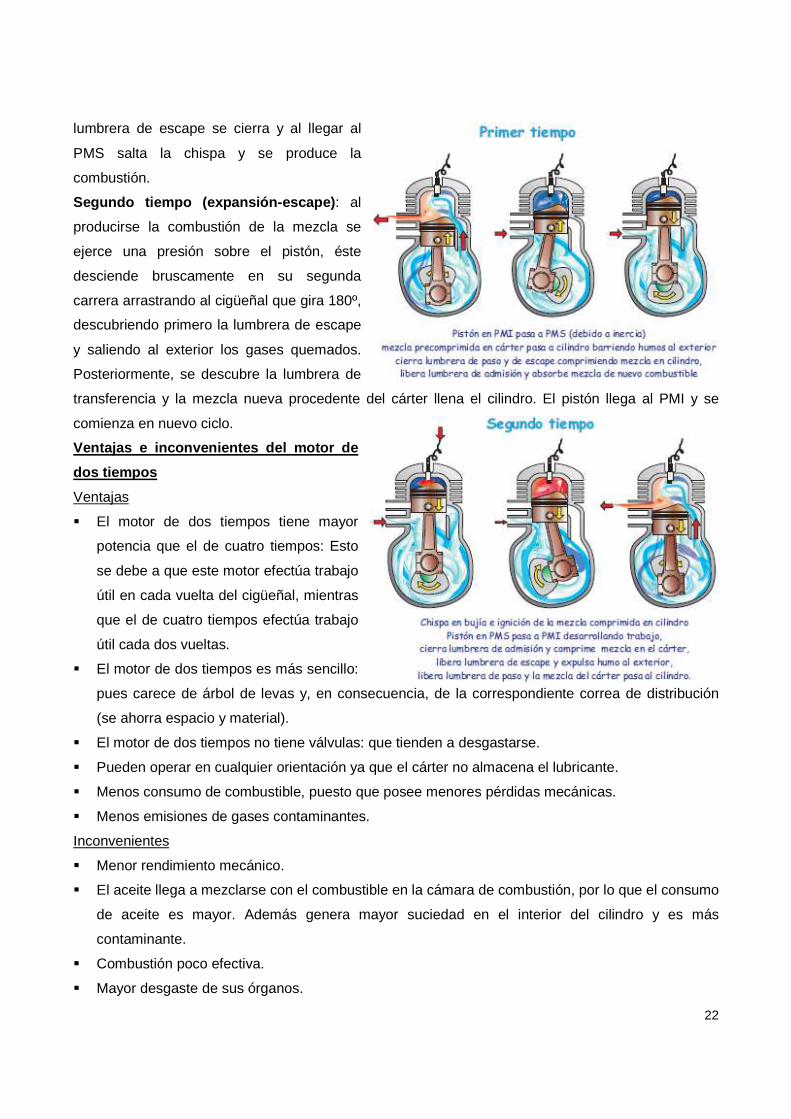
Primer tiempo (admisión-compresión) : el pistón asciende en su primera carrera desde el PMI hasta
el PMS arrastrado por el cigüeñal que gira 180º, comprimiendo la mezcla del cilindro al ascender y
descubriendo la lumbrera de admisión dejando pasar una cantidad de mezcla nueva al cárter . La
22
lumbrera de escape se cierra y al llegar al
PMS salta la chispa y se produce la
combustión.
Segundo tiempo (expansión-escape) : al
producirse la combustión de la mezcla se
ejerce una presión sobre el pistón, éste
desciende bruscamente en su segunda
carrera arrastrando al cigüeñal que gira 180º,
descubriendo primero la lumbrera de escape
y saliendo al exterior los gases quemados.
Posteriormente, se descubre la lumbrera de
transferencia y la mezcla nueva procedente del cárter llena el cilindro. El pistón llega al PMI y se
comienza en nuevo ciclo.
Ventajas e inconvenientes del motor de
dos tiempos
Ventajas
� El motor de dos tiempos tiene mayor
potencia que el de cuatro tiempos: Esto
se debe a que este motor efectúa trabajo
útil en cada vuelta del cigüeñal, mientras
que el de cuatro tiempos efectúa trabajo
útil cada dos vueltas.
� El motor de dos tiempos es más sencillo:
pues carece de árbol de levas y, en consecuencia, de la correspondiente correa de distribución
(se ahorra espacio y material).
� El motor de dos tiempos no tiene válvulas: que tienden a desgastarse.
� Pueden operar en cualquier orientación ya que el cárter no almacena el lubricante.
� Menos consumo de combustible, puesto que posee menores pérdidas mecánicas.
� Menos emisiones de gases contaminantes.
Inconvenientes
� Menor rendimiento mecánico.
� El aceite llega a mezclarse con el combustible en la cámara de combustión, por lo que el consumo
de aceite es mayor. Además genera mayor suciedad en el interior del cilindro y es más
contaminante.
� Combustión poco efectiva.
� Mayor desgaste de sus órganos.

23
Aplicaciones : Pequeños motores para lanchas fueraborda, motocicletas, motosierras,...
4.1.3. MOTOR DE COMBUSTIÓN DE CUATRO TIEMPOS DIESEL .
En este motor, la formación de la mezcla de aire y combustible (gasóleo) se realiza en el interior
del cilindro, comprimiendo el aire puro e introduciendo el combustible al final de la compresión con el
inyector. En el motor Otto, se introduce la mezcla directamente. Por lo tanto estos motores no tienen
carburador ni bujías, en lugar de ello poseen inyectores de combustible.
Estos motores han desplazado poco a poco a los motores de explosión.
Primer tiempo (etapa 0-1): Admisión . El pistón se desplaza
desde el PMS hasta el PMI, se abre la válvula de admisión y se
aspira aire filtrado. Expansión isobárica a presión atmosférica.
Al final del tiempo, el cigüeñal ha girado 180º.
Segundo tiempo (etapa 1-2): Compresión adiabática . El
pistón sube desde el PMI hasta el PMS. Ambas válvulas están
cerradas y se incrementa la presión y la temperatura del aire,
puesto que la compresión del aire es adiabática. Se realiza en esta etapa un trabajo negativo. El
cigüeñal ha girado otros 180º.
Tercer tiempo (etapa 2-3) combustión y (etapa 3-4) expansión. Comprimido el aire y con las
válvulas cerradas, se inyecta el combustible pulverizado y entra en contacto con el aire caliente,
provocando la combustión, que provoca una expansión brusca a presión constante (P=cte., isobárica)
(tramo 2-3) en la que se absorbe gran cantidad de calor y se realiza trabajo positivo útil. Tras esta
etapa, sigue una expansión adiabática (etapa 3-4) donde la presión y la temperatura de la mezcla
disminuyen, mientras el pistón baja hasta el PMI. El pistón gira otros 180º.
Cuarto tiempo (etapa 3-4 y 4-0): Escape . El pistón sube desde el PMI hasta el PMS, se abre la
válvula de escape disminuyendo la presión en el PMI y en el recorrido (1-0) hasta el PMS donde
terminan de salir los gases quemados a la presión atmosférica constante.
24
4.1.4. DIFERENCIAS ENTRE UN MOTOR DE GASOLINA Y UNO DIESEL.
Respecto a los elementos constructivos son similares, aunque existe una diferencia que radica
en que el carburador y el sistema de encendido (bujía) de los motores de gasolina, quedan sustituidos
en los motores diesel por un sistema de inyección.
Debido a las grandes presiones que los motores Diesel deben soportar, existe una diferencia en
cuanto al tamaño o volumen del motor.
� Los motores Diesel son más robustos y voluminosos. Mayor duración de la vida del motor.
� Mayor rendimiento térmico. Mayor cantidad de calor transformado en trabajo mecánico.
� Menor consumo y menos coste del combustible.
� Menor contaminación de los gases de escape. Emiten hollín.
Los motores Diesel también poseen inconvenientes:
� Es un motor más pesado, no solo porque la cámara es mayor, sino porque tiene que
soportar mayores presiones y las paredes son mayores.
� Sus costes de fabricación son mayores.
� Son más ruidosos y poseen mayores vibraciones.
4.2. MOTOR DE COMBUSTIÓN EXTERNA.
Recuerda que la combustión de estos motores se produce en una cámara externa al propio
motor y los gases generados en la combustión causan el movimiento del motor.
4.2.1. MÁQUINA DE VAPOR.
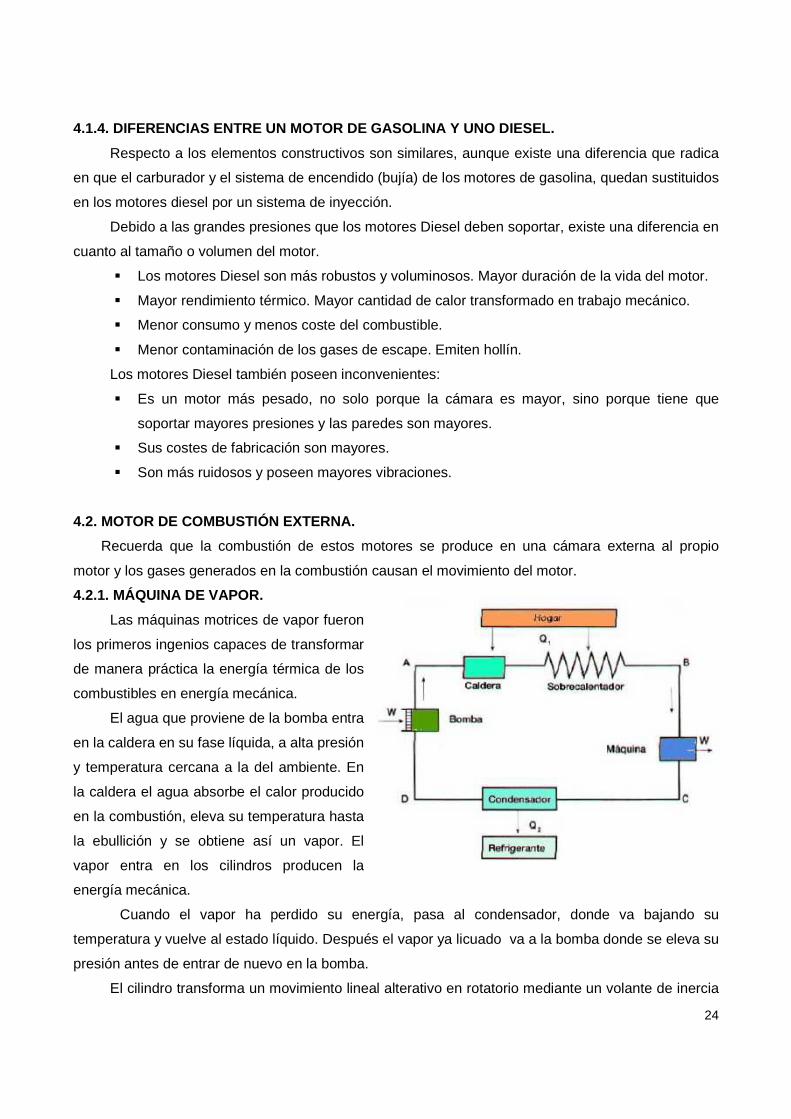
Las máquinas motrices de vapor fueron
los primeros ingenios capaces de transformar
de manera práctica la energía térmica de los
combustibles en energía mecánica.
El agua que proviene de la bomba entra
en la caldera en su fase líquida, a alta presión
y temperatura cercana a la del ambiente. En
la caldera el agua absorbe el calor producido
en la combustión, eleva su temperatura hasta
la ebullición y se obtiene así un vapor. El
vapor entra en los cilindros producen la
energía mecánica.
Cuando el vapor ha perdido su energía, pasa al condensador, donde va bajando su
temperatura y vuelve al estado líquido. Después el vapor ya licuado va a la bomba donde se eleva su
presión antes de entrar de nuevo en la bomba.
El cilindro transforma un movimiento lineal alterativo en rotatorio mediante un volante de inercia

25
unido a un sistema biela-manivela.
4.2.2. TURBINA DE VAPOR.
Las turbinas de vapor están presentes en diversos ciclos de
potencia que utilizan un fluido que pueda cambiar de fase, entre
éstos el más importante es el Ciclo Rankine , el cual genera el
vapor en una caldera, de la cual sale en unas condiciones de
elevada temperatura y presión.
Este vapor se expansiona en una turbina, pasa a través de
unas toberas en las cuales pierde presión y gana velocidad, a la vez
que se orienta el flujo de manera que incida tangencialmente sobre la turbina. La turbina está formada
por un rodete que tiene insertados un conjunto de álabes que absorben la energía produciendo la
rotación del eje.
En la turbina se transforma la energía interna del vapor en energía mecánica que, típicamente,
es aprovechada por un generador para producir electricidad. Las turbinas de vapor se utilizan en
centrales térmicas y nucleares de producción de energía eléctrica y en la propulsión de buques.
5. MÁQUINAS FRIGORÍFICAS.
Principio y funcionamiento
Una máquina frigorífica es todo dispositivo capaz de hacer descender la
temperatura de un determinado objeto o lugar, para hacerla inferior a la de un
entorno. El funcionamiento de estas máquinas se basa en el segundo
principio: el calor se puede transgredir espontáneamente de un cuerpo más
frio a otro más caliente sin que aportemos un trabajo exterior.
En general, las máquinas frigoríficas se rigen por un ciclo cerrado inverso
al de los motores térmicos, la máquina toma una cantidad de calor Q2 de un
foco frío llamado evaporador y cede una cantidad de calor, Q1 a un foco

26
caliente, en este proceso se aporta cierta cantidad de energía (T1>>T2).
W = |Q1 - Q2|
Eficiencia frigorífica: εεεε = Q2 / W. Se define como el calor conseguido partido por el trabajo
aportado.
Si cumple el Ciclo de Carnot: εεεε = Q2 / W = T2 / (T1 – T2)
El frío se produce por evaporación de un fluido frigorífico o refrigerante . Son sustancias que
cambias de estado por condensación o evaporación a presión y temperatura determinada. Deben
cumplir ciertas condiciones:
� No deben ser tóxicos.
� No pueden ser fácilmente inflamables o susceptibles de provocar explosiones.
� Tienen que poseer una viscosidad suficiente para que se produzcan fugas fácilmente.
� No deben ser corrosivos para los metales.
� Y desde algún tiempo, en caso de producirse una fuga, no debe dañar a la capa de ozono.
Partes de una máquina frigorífica
Una máquina frigorífica, está compuesta por cuatro elementos.
1. Evaporador : encargado de absorber el calor del foco frio (Q2).
2. Compresor : aporta el trabajo necesario al sistema (W).
3. Condensador : encargado de ceder el calor al foco caliente (Q1).
4. Sistema de expansión (válvula de expansión) : encargado de expandir el fluido antes de su
evaporación.
El fluido frigorífico circula en un circuito cerrado por el
sistema y sufre una serie de transformaciones.
1. El fluido es comprimido en el compresor . Proceso
no espontáneo que exige aporte de energía (W).
2. Licuado por enfriamiento en el condensador , ya
sea por circulación de aire o de agua, este cambio
de estado supone una cesión de calor Q1.
3. El fluido se almacena en un acumulador y
posteriormente es sometido a un proceso de
expansión en el sistema de expansión . El fluido
disminuye su presión hasta alcanzar la del
evaporador.
4. Al llegar al evaporador , el fluido se evapora transformándose en vapor. Para realizar este
cambio de estado, toma una cantidad de calor Q2 del foco frio, enfriando este.
5. Tras la evaporación, el fluido recupera las condiciones iniciales para que pase de nuevo al

27
evaporador, que inicia otra vez el ciclo.
Fases de la máquina frigorífica (ciclo teórico de l as máquinas frigoríficas)
Las máquinas frigoríficas siguen un ciclo P-V llamado
Ciclo de Carnot.
Flechas en sentido antihorario, luego es una máquina
frigorífica.
A-B , se produce la compresión del fluido, el volumen
disminuye de VA a VB y la presión aumenta de PA a PB,
también aumenta la temperatura, en esta fase la máquina
obtiene la energía necesaria para que actúe el compresor.
Es un proceso adiabático.
B-C Licuefacción o condensación del líquido a presión
casi constante (en nuestro gráfico aumenta de PB a PC), el volumen también disminuye de VB a VC. En
esta fase la máquina cede una cantidad de calor Q1 al foco caliente. Es un proceso isotermo.
C-D se produce la expansión del fluido con un pequeño aumento del volumen VC a VD y una
disminución de la presión de PC a PD y también de la temperatura. El proceso es adiabático.
D-A se produce la evaporación a presión casi constante y con un aumento de volumen de VD a
VA, la máquina absorbe una cantidad de calor Q2 del foco frío provocando su enfriamiento. El proceso
es isotermo.
Eficiencia frigorífica: εεεεf = Q2 / W
La frigoría es la cantidad de calor que hay que sustraer a 1 Kg de agua a 15º C para disminuir su
temperatura en un grado. 1 Fg = 1 Kcal.
Aplicaciones de las máquinas frigoríficas:
Básicamente, las máquinas frigoríficas se emplean para la industria de la alimentación,
distribución de artículos perecederos a través de vagones o camiones frigoríficos. Para
acondicionamiento de aire en viviendas, refrigeración y congelación domésticas. En medicinas para
órganos trasplantados. En investigación, para estudiar propiedades físicas a bajas temperaturas.
5.1. BOMBA DE CALOR.
Una bomba de calor es una máquina térmica que permite transferir energía en forma de calor
de un ambiente a otro, según se requiera. Para lograr esta acción es necesario un aporte de trabajo
acorde a la segunda ley de la termodinámica, según la cual el calor se dirige de manera espontánea
de un foco caliente a otro frío, y no al revés, hasta que sus temperaturas se igualan.
Este fenómeno de transferencia de energía calorífica se realiza -principalmente- por medio de
un sistema de refrigeración por compresión de gases refrigerantes, cuya particularidad radica en una
válvula inversora de ciclo que forma parte del sistema, la cual puede invertir el sentido del flujo de

28
refrigeración, transformando el condensador en evaporador y viceversa. Se puede obtener frio y calor
con la misma máquina.
Principio de funcionamiento
En una máquina frigorífica capaz de aprovechar el calor cedido en el condensador para calentar
un determinado espacio.
El circuito básico de una bomba de calor es similar a una máquina frigorífica donde el foco frío
es el local refrigerado y el foco caliente es el local a calentar.
Cuando una bomba de calor funciona como sistema calefactor, la energía útil es la cedida al
condensador en forma de energía calorífica y la energía absorbida es la que necesitamos para el
compresor y los elementos necesarios que puede llevar la instalación.
εεεεT = Pútil / Pabsorbida = Eútil / Eabsorbida = Q1 / W
Eútil = Eabsorbida + Efoco frio
Donde:
εT = eficiencia térmica de la bomba de calor.
Eútil equivale a Q1 (calor cedido al foco caliente por el condensador ).
Eabsorbida equivale a W (trabajo o energía consumida por el compresor ).
Efoco frio equivale a Q2 (calor absorbido del foco frio por el evaporador ).
En cualquier caso, la energía útil es mayor
que la absorbida. Si la eficiencia es igual o mayor
que 2 o 3 se considera una instalación eficaz.
29
AMPLIACIÓN DE CONTENIDOS
MÁQUINAS. ELEMENTOS DE MÁQUINAS
� Momento torsor
Cuando una fuerza actúa sobre un cuerpo capaz de girar sobre un eje,
produce un movimiento de rotación o giro. La magnitud que mide la intensidad
del giro se denomina momento torsor (representa la intensidad o potencia del
empuje que hace girar el cuerpo).
Si la fuerza F que actúa es perpendicular al radio de giro R en el punto donde se ejerce, el
momento torsor, M, se calcula como el producto de ambas magnitudes.
M = F · R
Cuanto mayor sea la fuerza ejercida o la distancia al eje de giro, mayor será el momento torsor
transmitido. Al momento torsor también se le denomina par de fuerzas o par motor .
� Mecanismos de transmisión circular
Ruedas de fricción
Son elementos de máquinas que transmiten movimiento circular entre dos ejes o árboles de
transmisión, mediante dos ruedas que se encuentran en contacto directo gracias a la fuerza de
rozamiento entre las dos ruedas. A este tipo de transmisión también se le conoce como transmisión
por fricción .
Estas ruedas presentan unas características:
� Los materiales que se utilizan tienen un alto coeficiente de
rozamiento para evitar que resbalan entre sí.
� Normalmente estas ruedas de fricción se emplean en árboles de
transmisión muy cercanos y cuando la potencia a transmitir es
pequeña.
� Este tipo de transmisión tiene la ventaja de que es muy fácil de
trabajar, no necesita mantenimiento y no produce ruidos.
Clasificación:
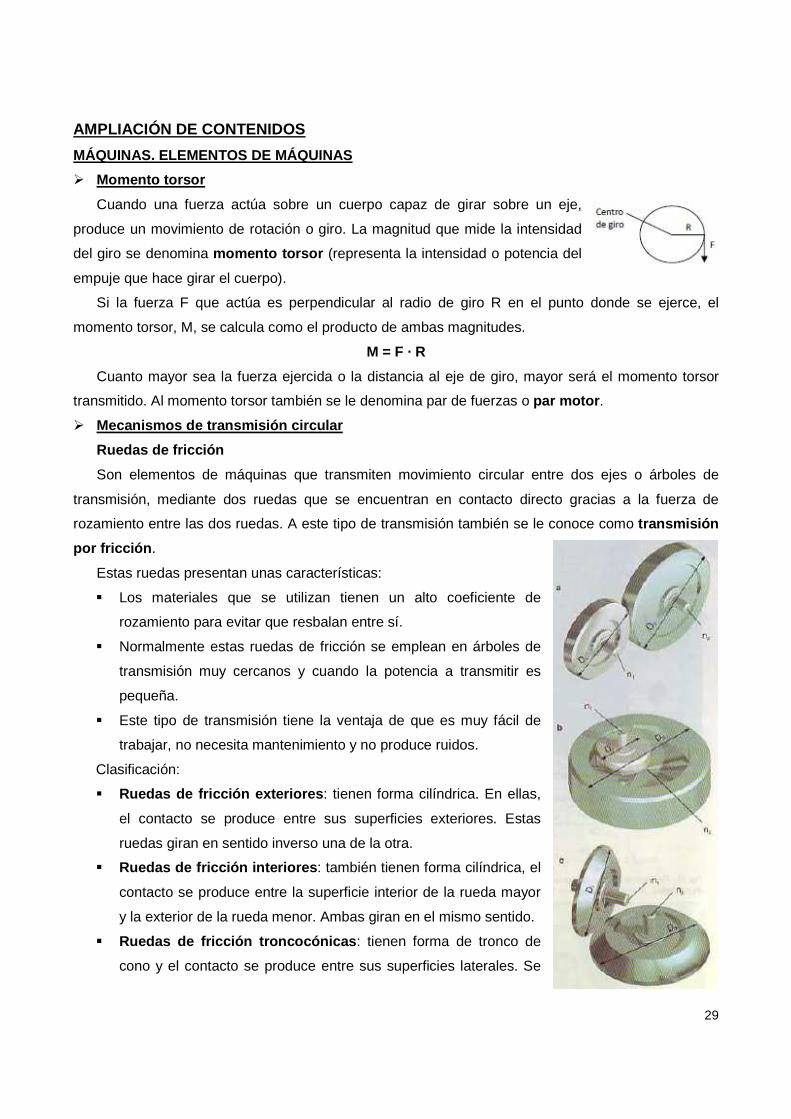
� Ruedas de fricción exteriores : tienen forma cilíndrica. En ellas,
el contacto se produce entre sus superficies exteriores. Estas
ruedas giran en sentido inverso una de la otra.
� Ruedas de fricción interiores : también tienen forma cilíndrica, el
contacto se produce entre la superficie interior de la rueda mayor
y la exterior de la rueda menor. Ambas giran en el mismo sentido.
� Ruedas de fricción troncocónicas : tienen forma de tronco de
cono y el contacto se produce entre sus superficies laterales. Se

30
utilizan cuando los árboles de transmisión no son paralelos. Estas ruedas giran en sentido
inverso una de la otra.
La relación de transmisión (i) para las ruedas de fricción exteriores e interiores es:
i = n 2 / n1 = D1 / D2
Donde:
n1 = es la velocidad de giro de la rueda motriz
n2 = es la velocidad de giro de la rueda conducida
D1 = el diámetro de la rueda motriz
D2 = el diámetro de la rueda conducida
En el caso de las ruedas de fricción troncocónicas, la relación de transmisión será:
i = n 2 / n1 = D1 / D2 = senββββ / senαααα
Donde:
β = es el ángulo que forma el eje de la rueda motriz con la línea PA (línea que une el punto de
corté de la prolongación de ambos ejes, con el punto de unión de ambas ruedas)
α = es el ángulo que forma el eje de la rueda conducida con la línea PA.
Engranajes
En el caso de los dientes rectos, es necesario definir una serie de parámetros básicos que son:
� Diámetro primitivo (dp): es el correspondiente a la circunferencia
primitiva. Dicha circunferencia es la que tendría una rueda de
fricción con la misma relación de transmisión.
� Diámetro exterior (de): es la correspondiente a la circunferencia
que limita exteriormente los dientes.
� Diámetro interior (di): es el que corres ponde a la circunferencia
que limita interiormente los dientes.
� Módulo (m): es el cociente entre el diámetro primitivo dp y el
número de dientes Z que posee la rueda dentada. Para que dos
engranajes puedan engranar tienen que tener el mismo módulo.
m = d p / Z
� Paso circular (p): es el arco de la circunferencia primitiva entre
dos flancos homólogos de dos dientes consecutivos. El paso se
puede obtener dividiendo la longitud de la circunferencia
primitiva Lp y el número de dientes Z. → p = L p / Z
� Mecanismos que transforman el movimiento
Torno-manivela

31
Un torno es un cilindro que consta de una manivela que lo hace
girar, de forma que es capaz de levantar pesos con menos
esfuerzo. Permite convertir un movimiento giratorio en uno lineal
continuo, o viceversa. Si aplicamos una fuerza F a la manivela, el
torno gira y la cuerda se enrolla en el cilindro a la vez que la carga
(R) se eleva. Es una palanca cuyo punto de apoyo es el eje del
cilindro y los brazos son la barra de la manivela (bF) y el radio del cilindro (r).
F · bF = R · r
Con el sistema manivela-torno se pueden tensar cuerdas, elevar cargas mediante una grúa o
enrollar toldos.
� Otros elementos de las máquinas
Trinquete
Es un mecanismo que permite la rotación de un eje en un
sentido, pero lo imposibilita en sentido contrario, se utiliza cuando
se requiere asegurar un sentido único de giro, como sucede en
gatos o aparatos de elevación, impidiendo que la carga se
convierta en elementos motriz cuando la fuerza de elevación cesa.
La utilización de este tipo de trinquete queda limitada a velocidades medias y bajas, para poder
ser empleado con mecanismos que transmitan grandes velocidades es necesario un resorte de
recuperación de fuerza lo que disminuye el rendimiento del mecanismo.
MOTORES TÉRMICOS
� Motor alternativo de combustión interna
Conceptos que definen un motor alternativo de combustión
En los motores de combustión interna, el calor necesario para llevar a cabo el trabajo se obtiene
de la combustión, en su interior, de una mezcla de aire y combustible. El motor alternativo consta de
un pistón que se mueve alternativamente dentro de un cilindro, entre dos posiciones extremas.
1. Punto muerto superior (PMS) : Punto más alto que alcanza el pistón en su recorrido. Cuando el
pistón alcanza este punto, el volumen que queda libre en el cilindro se representa como VPMS, que
también se llama cámara de combustión o explosión.
2. Punto muerto inferior (PMI) : Punto más bajo que alcanza el pistón en su recorrido. Cuando el
pistón alcanza este punto, el volumen que queda libre en el cilindro se representa como VPMI.
Además de esto, queda por definir:
– Carrera (L) : distancia entre el PMS y el PMI, es decir, es el recorrido del pistón entre esos dos
puntos. La cilindrada se mide en cm3.
– Régimen de giro del motor (n) : número de rpm a las que gira el motor
– Cilindrada unitaria (V) : Volumen barrido por el pistón, es decir, la diferencia entre el volumen

32
libre en el PMS y el PMI.
V = VPMI - VPMS
que también se puede poner como V = S · · · · L = (ππππ · D2)/4 · L, donde:
L = carrera (en cm)
D = diámetro o calibre del cilindro (en cm)
V = cilindrada (en cm3)
Si el motor está formado por más de un cilindro, la cilindrada total será, VT = z · V, siendo z el
número de cilindros del motor y V la cilindrada unitaria del mismo.
– Relación de compresión (R C): razón o relación entre el volumen libre del cilindro en el PMI y en
el PMS
RC = VPMI / VPMS
Esta magnitud nos sirve para valorar el rendimiento de un motor térmico, pues a mayor relación
de compresión, mayor rendimiento. Con la misma cilindrada, a una mayor relación de compresión
corresponde una cámara de combustión con menor volumen. Esto significa que un alto valor de la
relación de compresión proporciona presiones elevadas en el interior de la cámara de combustión
y por lo tanto un empuje más fuerte sobre el pistón en el momento de la combustión.
– Par motor y potencia
En un motor de 4 tiempos el par motor se
obtiene en el cigüeñal y depende del régimen
de giro del motor. Estas dos magnitudes se
derivan del proceso de combustión de la
mezcla, en el interior del motor y dependen de los parámetros del mismo.
La curva del par motor, es creciente hasta llegar a un punto en el que se obtiene el par máximo, a
partir de este punto, la gráfica es descendente.
La curva de la potencia es creciente hasta llegar al punto B y a partir de aquí la gráfica es
descendente.
La potencia máxima puede observarse que se alcanza a un número de revoluciones superior a
aquel en el que el par es máximo. Esto se explica si se tiene en cuenta que el aumento del
número de revoluciones puede compensar la disminución del par y permitir que la potencia
aumente un poco más.
� Ciclo de Carnot (ciclo de un motor de combustión in terna)
Antes de pasar a definir los ciclos de Carnot, definamos lo que es un proceso reversible. Es un
proceso cuya trayectoria se puede llevar a cabo a la inversa de forma exacta que el recorrido inicial.
Si una trayectoria termodinámica es reversible, se puede afirmar que en todo momento el sistema
siempre se encuentra en equilibrio, es decir, que la temperatura y presión del sistema permanecen
invariables a lo largo del tiempo.

33
Este tipo de procesos o transformaciones son ideales, no existen en la naturaleza porque en todo
proceso existe una pérdida de energía por pequeña que sea y nunca se puede recuperar al invertir el
proceso.
Existe un ciclo ideal que realiza un motor térmico ideal propuesto por el francés Carnot, que es
reversible y sirve como referencia para estudiar cualquier motor. Es el ciclo de Carnot para motores
de Carnot. Estos motores no son reales, son ideales.
Características:
1. Actúan entre dos focos de calor, el caliente a temperatura T1 y el frío a temperatura T2.
2. Se realizan en cuatro etapas o tiempos.
3. Se considera reversible.
Tiempos del motor de Carnot
Tiempo 1 : Expansión isotérmica (a temperatura
constante) del cilindro a la temperatura T1. En este
tiempo, el cilindro genera trabajo y absorbe calor Q1,
que es...
El trabajo generado es W1 = Q1 = R·T1 ·ln (V2/V1),
siendo V2 el volumen final que tiene el cilindro. V1 el
volumen inicial que tiene el cilindro y R la constante de
los gases ideales.
Tiempo 2 : Expansión adiabática. No hay intercambio
de calor con el exterior.
Se cumple la ecuación T1/T2 = (V3/V2)γγγγ-1, siendo γ una constante que depende del gas del interior
del cilindro. Esta constante se llama coeficiente adiabático. En este tiempo se produce trabajo.
Tiempo 3 : Compresión isotérmica. En este tiempo el gas se comprime a temperatura constante (T2)
del foco frío, cediendo una cierta cantidad de calor Q2 .Esto exige un consumo de trabajo....
W2 = Q1 = R·T2 ·ln (V3/V4)
Tiempo 4 : Compresión adiabática. El gas se comprime adiabáticamente, es decir, sin que haya
intercambio de calor. Su temperatura pasa de T2 a T1, finalizando el ciclo. En este tiempo, se cumple
la ecuación... T1/T2 = (V4/V1)γγγγ-1
NOTA: Un proceso adiabático es aquel en el que no existe intercambio de calor con el exterior, es
decir, el calor no entra ni sale del sistema.
En el gráfico se aprecian los cuatro tiempos del ciclo de Carnot
ab: Tiempo 1. Expansión isotérmica a temperatura T1 .Se absorbe el calor Q1.
bc : Tiempo 2. Expansión adiabática. Baja la temperatura de T1 a T2.
cd : Tiempo 3. Compresión isotérmica a temperatura T2. Se cede el calor Q2.

34
da: Tiempo 4. Compresión adiabática. Sube la temperatura de T2 a T1.
La zona sombreada es el trabajo realizado por el motor de Carnot .
El rendimiento, recordemos, es... ηηηη = 1 – Q2/Q1 = 1 – [R·T2 ·ln (V3/V4)] / [R·T1 ·ln (V2/V1)]
Comparando los tiempos 2 y 4, (V3/V2)γγγγ-1 = (V4/V1)
γγγγ-1 → (V3/V2) = (V4/V1) → (V3/V4) = (V2/V1)
Sustituyendo esta última expresión en la fórmula del rendimiento, la expresión quedará
ηηηη = 1 – T2/T1
Es decir, el rendimiento de un ciclo que pertenece al motor de Carnot solo depende de la
temperatura del foco frío y del caliente, siendo independiente de la naturaleza del sistema.
Si el ciclo de Carnot funcionase al revés (puesto que es reversible), hablamos de máquina
frigorífica.
NOTA IMPORTANTE: El rendimiento de otra máquina cualquiera (real) que actúa entre los
mismos focos de temperatura (T1 y T2) no puede ser superior a la Carnot, Nunca.
� Ciclo de Rankine (ciclo de un motor de combustión e xterna)
Para calcular el rendimiento empleamos la siguiente fórmula:
ηηηη = 1 – Tbm/Tam
Siendo Tbm y Tam las temperaturas medias del foco caliente y frió.
Habitualmente se realizan modificaciones con objeto de mejorar el rendimiento global de la
instalación. Las más importantes son:
� Recalentamiento del vapor de salida de la turbina.
� Precalentamiento del agua a la entrada de la caldera mediante la extracción de una parte del
vapor antes de su total expansión.
� Tiempos de motores de
explosión y combustión
A continuación se puede
observar los ciclos ideales para
un motor diesel y uno de
gasolina, así como las
diferentes fases de cada uno
de ellos.

35
� Turbinas de gas (motores rotativos de combustión in terna)
Analizamos aquellos motores en que la expansión de los gases procedentes de la combustión
actúa sobre una turbina. La de la figura es de tipo axial.
Los principales elementos son:
� Compresor . Comprime el aire
transformando la energía cinética del
aire en energía de presión.
� Cámara de combustión . Lugar
donde llega el aire comprimido, al
que se le inyecta combustible
pulverizado mediante los inyectores.
Los gases de la combustión son lanzados contra los álabes de la turbina a través de las
toberas que transforman la energía de presión en cinética.
� Turbina . El gas que es una mezcla de aire con productos de la combustión es recibido por los
álabes del rotor y pierde su energía cinética para transformarla en mecánica, que a su vez es
aprovechada para mover el propio compresor.
Rendimiento de una turbina de gas
El rendimiento teórico de una turbina de gas de ciclo abierto depende de la presión de entrada
(alrededor de 1 bar) y la de salida del compresor donde rp es la relación de presiones del aire saliente
y del aire entrante rp = p2 / p1, y γ es el exponente adiabático (1,4 para el gas ideal).
La expresión es: ηηηη = 1 – 1 / rp(γγγγ-1)/γγγγ
� Máquina frigorífica y bomba de calor
Utilizan como principio de funcionamiento el ciclo inverso de Carnot: aportando un trabajo a un
sistema podemos absorber cierta cantidad de calor de un foco frío y cederlo a uno caliente.
� Máquina frigorífica : su objetivo es extraer la máxima cantidad de calor de un foco frío (el
interior del frigorífico)
� Bomba de calor : su objetivo es aportar la mayor cantidad posible de calor a un recinto.
Elementos:
� Compresor :
aporta el trabajo
necesario al
sistema (Wc).
� Evaporador :
encargado de absorber calor del foco frío (Qf).
� Condensador : encargado de ceder calor al foco caliente (Qc).
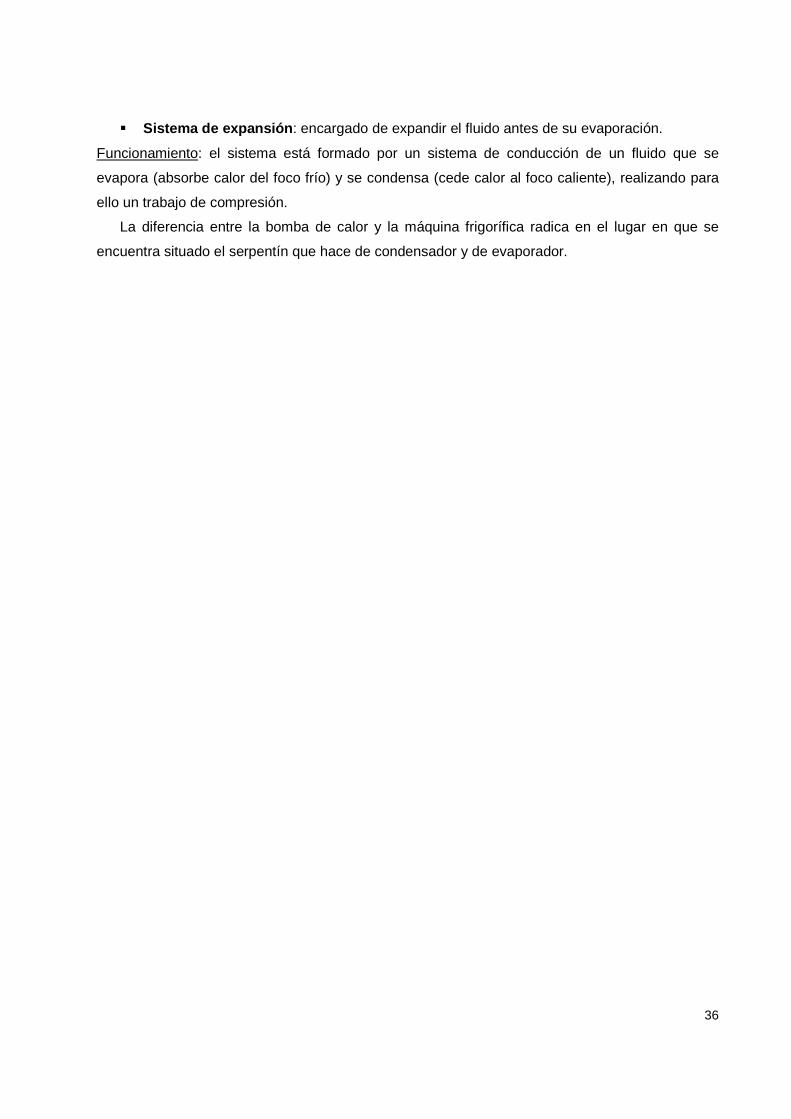
36
� Sistema de expansión : encargado de expandir el fluido antes de su evaporación.
Funcionamiento: el sistema está formado por un sistema de conducción de un fluido que se
evapora (absorbe calor del foco frío) y se condensa (cede calor al foco caliente), realizando para
ello un trabajo de compresión.
La diferencia entre la bomba de calor y la máquina frigorífica radica en el lugar en que se
encuentra situado el serpentín que hace de condensador y de evaporador.
Top Related