





Idiomas
Páginas
Jurídico


Fundamentos de RobóticaHerramientas Matemáticas para la Localización Espacial
Matrices de Rotación
Ricardo-Franco [email protected]
Escuela Universitaria de Ingeniería MecánicaUniversidad de Tarapacá
Arica, Chile
April 16, 2015
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 1 / 27

Outline
Outline
1 Representación de la posiciónCoordenadas cartesianasCoordenadas polares y cilíndricasCoordenadas esféricasRepresentación gráfica de la posición en Sage
2 Representación de la orientaciónMatrices de rotaciónComposición de rotacionesÁngulos de EulerPar de rotaciónRepresentación gráfica de la orientación en Sage
3 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 2 / 27

Representación de la posición
Outline
1 Representación de la posiciónCoordenadas cartesianasCoordenadas polares y cilíndricasCoordenadas esféricasRepresentación gráfica de la posición en Sage
2 Representación de la orientaciónMatrices de rotaciónComposición de rotacionesÁngulos de EulerPar de rotaciónRepresentación gráfica de la orientación en Sage
3 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 3 / 27

Representación de la posición Coordenadas cartesianas
Coordenadas cartesianas en 2 y 3 dimensiones
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 4 / 27

Representación de la posición Coordenadas polares y cilíndricas
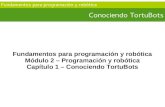
Coordenadas polares y cilíndricas
Las coordenadas cilíndricas especifican “r” la magnitud de laproyección del vector “p” en el plano “OXY”, “θ” el ánguloentre esta proyección y el eje “OX”, y “z” la proyecciónde “p” en el eje OZ.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 5 / 27

Representación de la posición Coordenadas esféricas
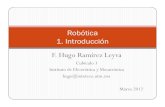
Coordenadas esféricas
Las coordenadas esféricas especifican “r” la magnitud del vector“p”, “θ” el ángulo entre su proyección en el plano “OXY”con el eje “OX”, y “φ” el ángulo entre “p” y el eje “OZ”.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 6 / 27

Representación de la posición Representación gráfica de la posición en Sage
Dibujando un sistema de coordenadas 3D en Sage
“vect_x, vect_y, vect_z” son vectores unitarios.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 7 / 27

Representación de la posición Representación gráfica de la posición en Sage
Dibujando un vector 3D en Sage
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 8 / 27

Representación de la orientación
Outline
1 Representación de la posiciónCoordenadas cartesianasCoordenadas polares y cilíndricasCoordenadas esféricasRepresentación gráfica de la posición en Sage
2 Representación de la orientaciónMatrices de rotaciónComposición de rotacionesÁngulos de EulerPar de rotaciónRepresentación gráfica de la orientación en Sage
3 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 9 / 27

Representación de la orientación Matrices de rotación
Producto punto
Ref: http://en.wikipedia.org/wiki/Dot_product
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 10 / 27

Representación de la orientación Matrices de rotación
Producto punto
Considerando un sistema de referencia OUV, un vector “P” sepuede expresar como P = pu iu + pv jv , con iu y jv vectoresunitarios.
Ref: http://en.wikipedia.org/wiki/Dot_product
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 11 / 27

Representación de la orientación Matrices de rotación
Matrices de rotaciónSi P = pu iu + pv jv es un vector descrito en OUV, y si OUV esmóvil y está rotado α grados en relación a OXY, entonces:
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 12 / 27

Representación de la orientación Matrices de rotación
Matriz de rotación 2DConsiderando px = ix · (pu iu + pv jv ) y py = jy · (pu iu + pv jv ):
Donde,
es llamada: “matriz de rotación”.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 13 / 27

Representación de la orientación Matrices de rotación
Matriz de rotación 2D
cos(90 + α) = −sen(α)Cuando α = 0, R es igual a la matriz identidad.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 14 / 27

Representación de la orientación Matrices de rotación
Matriz de rotación 3DEl mismo principio:
Donde,
es llamada: “matriz de rotación”.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 15 / 27

Representación de la orientación Matrices de rotación
Rotación sobre eje OX
matriz básica de rotación
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 16 / 27

Representación de la orientación Matrices de rotación
Rotación sobre eje OY y OZ
matriz básica de rot. matriz básica de rot.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 17 / 27

Representación de la orientación Composición de rotaciones
Rotación α, φ, θLas matrices de rotación en general pueden componerse dematrices de rotación básicas.Si se rota α alrededor de OX, φ alrededor de OY, y θ alrededor deOZ, se obtiene:
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 18 / 27

Representación de la orientación Composición de rotaciones
Rotación θ, φ, αSi se rota θ alrededor de OZ, φ alrededor de OY, y α alrededor deOX, se obtiene:
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 19 / 27

Representación de la orientación Composición de rotaciones
Multiplicando matrices con expresiones en Sage
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 20 / 27

Representación de la orientación Ángulos de Euler
Ángulos de Euler WUW
φ alrededor de OZθ alrededor de OU’ψ alrededor de OW”
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 21 / 27

Representación de la orientación Ángulos de Euler
Ángulos de Euler WVW
φ alrededor de OZθ alrededor de OV’ψ alrededor de OW”
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 22 / 27

Representación de la orientación Ángulos de Euler
Ángulos de Euler XYZ
ψ alrededor de OXθ alrededor de OYφ alrededor de OZ
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 23 / 27

Representación de la orientación Par de rotación
Par de rotación
La aplicación de un par de rotación que rote un vector “p”un ángulo “θ” alrededor del vector unitario “k” se realizaa través de la siguiente expresión:Rot(k , θ)p = p cos(θ) + (k × p)sen(θ) + k(k · p)(1 − cos(θ))
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 24 / 27

Representación de la orientación Representación gráfica de la orientación en Sage
Rotando un sistema de coordenadas 3D en Sage
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 25 / 27

Referencias
Outline
1 Representación de la posiciónCoordenadas cartesianasCoordenadas polares y cilíndricasCoordenadas esféricasRepresentación gráfica de la posición en Sage
2 Representación de la orientaciónMatrices de rotaciónComposición de rotacionesÁngulos de EulerPar de rotaciónRepresentación gráfica de la orientación en Sage
3 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 26 / 27

Referencias
BibliografíaBarrientos, A., Peñín, L.F., Balaguer, C., y Aracil, R., 2007,Fundamentos de Robótica, 2nd edition, McGraw-Hill.
R. F. Mendoza-Garcia (Mecánica, UTA) Herramientas Matemáticas April 16, 2015 27 / 27
Top Related