






Idiomas
Páginas
Jurídico


Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
Traducción, Investigación, Planificación : JAIRO GAVIRIA OSORIO Docente ATS/Cartografía IET 1079
Diseño y diagramación : Leidy Tatiana Méndez Gutiérrez
Diseñadora Grafica Revisión : CARLOS A. URIBE ROZO Docente
ATS IET 613
ESTE MANUAL DE NAVEGACION BASADA EN EL PERFORMANCE (PBN), DEL CENTRO DE ESTUDIO DE CIENCIAS AERONAUTICAS (CEA) NO PUEDE REPRODUCIRSE NI TOTAL NI PARCIALMENTE, POR NINGUN MEDIO SIN AUTORIZACION ESCRITA DEL EDITOR

Resumen Ejecutivo
l-(4)
INTRODUCCIÓN
El presente libro de texto es una guía del DOC.9613/AN937 y tiene por objetivo una mayor facilidad de comprensión en el aprendizaje e interpretación de las normas alli establecidas. La forma de elaboración, redacción e ilustración utilizada en este libro de texto, no difiere con la filosifía de la reglamentación OACI.
I-(i)
(PBN)
RESUMEN EJECUTIVO
Antecedentes
El continuo crecimiento de la aviación exige aumentos en la capacidad del espacio aéreo, por lo tanto, haciendo hincapié en la necesidad de optimizar la utilización del espacio aéreo disponible. Mejora de la eficiencia operativa derivada de la aplicación de navegación de área (RNAV), técnicas que han resultado en el desarrollo de aplicaciones de navegación en diversas regiones a nivel mundial y para todas las fases de vuelo. Estas aplicaciones podrían ser ampliadas para proporcionar orientación a las operaciones de movimiento en tierra. Los requisitos para las aplicaciones de la navegación en rutas específicas o dentro de un determinado espacio aéreo debe ser definido de forma clara y concisa. Esto es para asegurar que la tripulación de vuelo y los controladores de tránsito aéreo (ATC) sean conscientes de las capacidades de los Sistemas RNAV de a bordo, a fin de determinar si el rendimiento del sistema RNAV es adecuado para los requisitos del espacio aéreo. Los sistemas RNAV han evolucionado de manera similar a los procedimientos y rutas convencionales basados en tierra. Un sistema RNAV específico fue identificado y su desempeño fue evaluado a través de una combinación de análisis y ensayos en vuelo. Para las operaciones domesticas, los primeros sistemas usados son el VOR y el DME para calcular la posición, para operaciones oceánicas, son empleados sistemas de navegación inercial (INS). Estos "nuevos" sistemas fueron desarrollados, evaluados y certificados. El espacio aéreo y los criterios de franqueamiento de obstáculos fueron desarrollados sobre la base del desempeño del equipo disponible y las especificaciones de requisitos se basaron en las capacidades disponibles. En algunos casos, es necesario identificar los distintos modelos de equipos que podrían ser operados en un espacio aéreo en cuestión. Tales necesidades prescriptivas se debieron a retrasos en la introducción de nuevas capacidades de sistemas RNAV y costos más elevados para mantener la certificación apropiada. Para evitar este tipo de especificaciones prescriptivas de requisitos, este manual presenta un método alternativo para definir los requisitos de equipo especificando los
Resumen Ejecutivo
l-(ii)
requisitos de funcionamiento. Esto se denomina navegación basada en el rendimiento (PBN).
El concepto PBN especifica el rendimiento de los sistemas RNAV en aeronaves y los requisitos que se definen en términos de exactitud, integridad, disponibilidad, continuidad y funcionalidad, que son necesarios para las operaciones propuestas en el contexto de un concepto de espacio aéreo en particular. El concepto PBN representa un cambio de sensores basados en la navegación y basada en el rendimiento. Los requisitos de funcionamiento se indican en las especificaciones de navegación, que también identifican la elección de los sensores de navegación y equipos que pueden ser utilizados para satisfacer los requisitos de rendimiento. Estas especificaciones de navegación se definen en un nivel de detalle suficiente para facilitar la armonización mundial mediante el suministro de aplicaciones específicas de orientación para los Estados y los operadores. En virtud de la PBN, los requisitos de navegación genéricos son definidos sobre la base de las necesidades operacionales. Los operadores evalúan opciones disponibles en materia de tecnología y servicios de navegación, lo que podría permitir los requisitos que deben cumplirse. Un operador que tiene la oportunidad de seleccionar una opción más rentable, en lugar de una solución que se imponen como parte de las necesidades operacionales. La tecnología puede evolucionar con el tiempo sin requerir que la operación en sí misma deba ser revisada, mientras que el rendimiento esperado es provisto por el sistema RNAV. Como parte de la labor futura de la OACI, se prevé que otros medios para cumplir con los requisitos de las especificaciones de navegación serán evaluados y podrán ser incluidos en las especificaciones de navegación, según proceda. PBN ofrece una serie de ventajas relacionadas con el sensor específico y el método de desarrollo del espacio aéreo y criterios de franqueamiento de obstáculos, a saber:
a) reduce la necesidad de mantener sensores específicos para las rutas y procedimientos, y sus costos asociados;
b) evita la necesidad de desarrollar sensores específicos para las operaciones con cada nueva evolución de los sistemas de navegación, los cuales serian costos prohibitivos;
c) permite un uso más eficiente del espacio aéreo (trazado de rutas, eficiencia en el consumo de combustible y la reducción del ruido);
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (iii)
d) se aclara cómo se utilizan los sistemas RNAV, y
e) facilita el proceso de aprobación operacional para los operadores al ofrecer un conjunto limitado de especificaciones de navegación destinados para su utilización.
Dentro de un concepto de espacio aéreo, los requisitos del PBN se verán afectados por la comunicación, la vigilancia y entornos ATM, la infraestructura de ayudas a la navegación y la capacidad operativa y funcional necesarias para cumplir con la aplicación ATM. ______________ Los requisitos PBN de rendimiento también dependerá de lo reversible, que medios no-RNAV de navegación están disponibles y qué grado de redundancia es necesaria para garantizar la adecuada continuidad de las funciones. Durante el desarrollo del concepto de la navegación basada en el rendimiento, se reconoció que los sistemas RNAV avanzados de aviones están logrando un nivel predecible de precisión de navegación, que, junto con un nivel adecuado de funcionalidad, permite un uso más eficiente del espacio aéreo disponible. También tiene en cuenta el hecho de que los sistemas RNAV han desarrollado a lo largo de un período de 40 años y como resultado hay una gran variedad de sistemas que ya se han implementado. PBN principalmente identifica los requisitos de navegación, independientemente de los medios por los que estas se cumplan.
OBJETO Y ÁMBITO DE APLICACIÓN Este manual define la relación entre aplicaciones RNAV y RNP y las ventajas y limitaciones de la elección de uno u otro como requisito para la navegación en un concepto del espacio aéreo. También tiene por objeto proporcionar orientación práctica a los Estados, proveedores de servicios de navegación aérea y los usuarios del espacio aéreo sobre la manera de implementar las aplicaciones RNAV y RNP, y cómo asegurar que los requisitos de rendimiento son adecuados para la aplicación planeada. Reconociendo que hay muchas estructuras de espacio aéreo basadas en aplicaciones RNAV existentes, y consciente de los altos costos para los operadores en el cumplimiento de las distintas certificaciones y requisitos de aprobación operacional para cada aplicación, este manual apoya a los responsables de evaluar si una aplicación puede utilizar una especificación de navegación existente para la implementación. El objetivo principal es servir de orientación en la determinación de si, por un ajuste del concepto del espacio aéreo, la aplicación de navegación y/o infraestructura, es posible hacer uso de una especificación de navegación existente, con lo que se evitaría la necesidad de una costosa y potencialmente imposición de un nuevo requisito de certificación para la operación en un espacio aéreo. Cuando el análisis identifica que una nueva norma es necesaria, el manual identifica los pasos necesarios para el establecimiento de esa nueva norma. Identifica un medio por el cual, a través de los auspicios de la OACI, la proliferación innecesaria de normas puede ser evitada.
Resumen Ejecutivo
l-(iv)
TERMINOLOGÍA NAVEGACIÓN BASADA EN EL RENDIMIENTO (PBN) Dos aspectos fundamentales de cualquier operación PBN son los requisitos establecidos en la correspondiente especificación de navegación y la infraestructura de ayudas para la navegación (tanto en tierra y basadas en el espacio) que permite el funcionamiento de dicho sistema. Una especificación de navegación es un conjunto de requisitos tanto de aeronaves como de tripulación necesarias para apoyar una aplicación de navegación dentro de un concepto definido de espacio aéreo. La especificación de navegación define el rendimiento requerido por el sistema RNAV como cualquier requisito funcional tal como la capacidad para llevar a cabo procedimientos en trayectoria curva o para volar las rutas paralelas compensadas. Los sistemas RNAV y RNP son similares. La diferencia clave entre ellas es el requisito de la supervisión a bordo de la performance y alerta. Una especificación de navegación que incluye un requisito para la vigilancia del rendimiento de navegación a bordo y alerta se refiere a una especificación RNP. La que no tiene tales requisitos se refiere a una especificación RNAV. Un sistema de navegación de área capaz de lograr los requisitos de performance de una especificación RNP se conoce como un sistema RNP. En la elaboración del concepto PBN y el desarrollo de la terminología asociada, se hizo evidente a la performance de navegación requerida y el estudio de requisitos operaciones especiales de funcionamiento (RNPSORSG), que la utilización de expresiones RNAV relacionados podrían crear algunas complejidades. Los Estados y las organizaciones internacionales deberían tomar nota en particular de la explicación de términos en el Capítulo 1, Parte A, del Volumen I de este manual. Debido a los requisitos específicos de rendimiento son definidos para cada especificación de navegación, una aeronave aprobada para una especificación RNP no está aprobada automáticamente para todas las especificaciones RNAV. Del mismo modo, una aeronave aprobada para una especificación RNP o RNAV teniendo estrictos requisitos de exactitud (por ejemplo, la especificación RNP 0.3) no es aprobada automáticamente para una especificación de navegación con menos exigencias estrictas de precisión (por ejemplo, RNP 4).
ESTRATEGIAS DE TRANSICIÓN Transición a la PBN
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (v)
Se espera que todas las futuras aplicaciones RNAV identifiquen los requisitos de navegación a través del uso de las especificaciones de performance en lugar de definir las de equipos específicos de los sensores de navegación. Cuando existen operaciones que han sido definidos con anterioridad a la publicación de este manual, una transición a la PBN no necesariamente se lleva a cabo. Sin embargo, cuando las revisiones a los requisitos funcionales y operativos son realizadas, el desarrollo y la publicación de las especificaciones revisadas deben utilizar el proceso y la descripción establecida en este manual. Transición a las especificaciones RNP Como resultado de las decisiones adoptadas en la industria en el decenio de 1990, sistemas RNAV más modernos proporcionan vigilancia del rendimiento a bordo y alerta, por lo que las especificaciones de navegación desarrolladas para el uso de estos sistemas pueden ser designadas como RNP. Muchos sistemas RNAV, mientras ofrecen muy alta precisión y posesión muchas de las funciones proporcionadas por los sistemas RNP, no son capaces de ofrecer garantías de su rendimiento. Reconociendo esto, y para evitar que los operadores incurran en gastos innecesarios, el uso de un sistema RNP, como muchos nuevos requisitos de navegación existentes continuaran para especificar sistemas RNAV en lugar de sistemas RNP. Por tanto, se espera que las operaciones RNAV y RNP coexistan por muchos años. Sin embargo, los sistemas RNP proporcionan mejoras en la integridad de la operación que permite, entre otras cosas, posiblemente reducción de espaciamiento en ruta y pueden proporcionar suficiente integridad para permitir que sólo los sistemas RNP a ser usados para navegar en un determinado espacio aéreo. El uso de sistemas RNP, puede por lo tanto ofrecer significante seguridad, beneficios en la eficiencia operativa. Mientras que las aplicaciones RNAV y RNP co-existan por varios años, se prevé que habrá una transición gradual a las aplicaciones RNP, como la proporción de las aeronaves equipadas con sistemas RNP aumentan el costo de la transición se reduce.
I-(vi)
TABLA DE CONTENIDO Pagina Resumen ejecutivo
Tabla de Contenido
Prologo
Referencias
Abreviaturas
Explicación de Términos
Parte A - CONCEPTO DE NAVEGACIÓN BASADA EN LA PERFORMANCE
Capítulo 1. Descripción de la navegación basada en la performance Introducción
General
Beneficios
Contexto de la PBN
Ámbito de aplicación de la navegación basada en el rendimiento
Rendimiento Lateral
Rendimiento Vertical
Especificación de Navegación
Infraestructura de ayudas a la navegación
Aplicaciones de navegación
La evolución futura
Capítulo 2. Concepto de Espacio Aéreo
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (vii)
Introducción
El Concepto de Espacio Aéreo
Conceptos de espacio aéreo por el área de operaciones
Oceánicas y continental remota
Continental en ruta
Espacio aéreo terminal: llegadas y salidas
Aproximación
Capítulo 3. Interesados de los usos navegación basada en el rendimiento Introducción
La planificación del espacio aéreo
Diseño de procedimientos de vuelo por instrumentos
Introducción
No-RNAV: diseño de procedimientos convencionales
Introducción de sensores específicos de diseño procedimiento RNAV
Diseño de procedimiento RNP (antes de la PBN)
Diseño de procedimiento RNP
Aprobación operacional de aeronavegabilidad
Generalidades
Aprobación de los sistemas RNAV para operaciones RNAV-X
Aprobación de los sistemas RNAV para operaciones RNP-X
Aprobación operacional
El proceso general de aprobación RNAV
El entrenamiento de la tripulación de vuelo
Gestión de bases de datos de navegación
Tripulación de vuelo y operaciones de tránsito aéreo
PARTE B – GUIA DE IMPLEMENTACION
Capítulo 1. Introducción a los procesos de implementación
Tabla de Contenido
l-(viii)
Introducción
Descripción general de procesos
Desarrollo de una nueva especificación de navegación
Capítulo 2. Proceso 1: Determinar los requisitos Introducción
Proceso de entrada 1
Pasos en el Proceso 1
Paso 1 - Formular concepto de espacio aéreo
Paso 2 - Evaluación de la flota existente y la capacidad de la infraestructura de
ayudas a la navegación disponible
Paso 3 - Evaluación de los sistema de vigilancia ATS y la Infraestructura de
comunicaciones y sistema ATM
Paso 4 - Identificar rendimiento de navegación necesario y requisitos funcionales
Capítulo 3. Proceso 2: Determinación de especificaciones de navegación de la OACI para la implementación Introducción
Proceso de entrada 2
Pasos en el Proceso 2
Paso 1 - Revisión de las especificaciones de navegación OACI en el Volumen II
Paso 2 - Identificar la adecuada especificación de Navegación de la OACI
específicas de aplicación en el Medio ambiente CNS / ATM
Paso 3 - Identificar los compromisos con el concepto de espacio aéreo
funcionales y de navegación necesarios (si es necesario)
Capítulo 4. Proceso 3: Planificación e implementación Introducción
Proceso de entrada 3
Pasos en el Proceso 3
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (ix)
Paso 1 - Formular plan de seguridad
Paso 2 - Validar el concepto de la seguridad del espacio aéreo
Paso 3 - diseño de Procedimientos
Paso 4 - Procedimiento de validación en tierra
Paso 5 - Decisión de implementación
Paso 6 - Vuelo de inspección y validación en vuelo
Paso 7 - Consideraciones de integración de sistemas ATC
Paso 8 - La sensibilización y material de entrenamiento
Paso 9 - Establecer la fecha de ejecución operativa
Paso 10 - Post-examen de la aplicación
Capítulo 5. Directrices para el desarrollo de una nueva especificación de navegación
Introducción
Pasos para desarrollar una nueva especificación de navegación
Paso 1 - evaluación de viabilidad y de negocio
Paso 2 - Desarrollo de la especificación de navegación
Paso 3 - Identificación y desarrollo de las disposiciones relacionados con la
OACI
Paso 4 - Evaluación de la seguridad
Paso 5 - Seguimiento
ADJUNTO AL VOLUMEN I
Adjunto 1 - Sistemas de Navegación Área (RNAV) Propósito
Antecedentes
Sistema RNAV - funciones básicas
Tabla de Contenido
l-(x)
Sistema RNP - las funciones básicas
Funciones específicas RNAV y RNP
Adjunto 2 - Datos de los procesos
Datos aeronáuticos
La precisión de los datos y la integridad
Prestación de servicios de datos aeronáuticos
Alteración de los datos aeronáuticos
I-(xi)
PRÓLOGO
Este manual consta de dos volúmenes:
Volumen I - Concepto y Orientación de implementación
Volumen II - La implementación de RNAV y RNP
Organización y contenido del Volumen I:
PARTE A - La navegación basada en el rendimiento concepto (PBN), contiene tres capítulos:
Capítulo 1 - Descripción de la navegación basada en el rendimiento, explica el concepto PBN y, concretamente, se hace hincapié en la designación de las especificaciones de navegación, así como la distinción entre las especificaciones RNP y RNAV.
Este capítulo proporciona la base para este manual.
Capítulo 2 - Conceptos de la Operación, proporciona un contexto para la PBN y explica que no existe de manera aislada, sino más bien como un componente integral de un espacio aéreo. En este capítulo también se aclara que PBN es uno de los facilitadores de CNS/ATM en un espacio aéreo.
Capítulo 3 - Las partes interesadas "Utilización de la navegación basada en el rendimiento, se explica cómo los planificadores del espacio aéreo, diseñadores de procedimientos, autoridades de aeronavegabilidad, los controladores y los pilotos utilizan el concepto de la PBN. Escrito por especialistas de estas diversas disciplinas, este capítulo está destinado a los no especialistas en las distintas disciplinas.
PARTE B - Orientación de Aplicación, contiene cinco capítulos sobre la base de tres procesos encaminados a la prestación de orientaciones para la aplicación de la PBN:
Capítulo 1 - Introducción a los procesos de aplicación, proporciona una visión general de los tres procesos de ejecución con miras a fomentar el uso de las especificaciones de navegación en la aplicación de la PBN.
Capítulo 2 - Proceso 1: Determinación de Requisitos, se esbozan las medidas que un Estado o región a fin de determinar su estrategia y requisitos operacionales de navegación basada en el rendimiento mediante el desarrollo de un concepto de espacio aéreo.
Capítulo 3 - Proceso 2: Determinación de la Especificación de navegación de OACI para implementación, se explica cómo, una vez que los requisitos de navegación son identificados, se debería intentar utilizar una especificación de navegación existente para satisfacer las necesidades detectadas.
Capítulo 4 - Proceso 3: planificación y ejecución, proporciona orientación sobre las actividades y tareas que deben emprenderse a fin de posibilitar la aplicación operativa.
Prologo
l-(xii)
Capítulo 5 - Directrices para el Desarrollo de una nueva especificación de navegación, describe cómo un Estado o región si el progreso se hace imposible satisfacer un concepto del espacio aéreo mediante una especificación de navegación existente.
Adjuntos a Volumen I
Adjunto A - Sistemas de Navegación de área (RNAV), ofrece una explicación de los sistemas RNAV, cómo funcionan y sus beneficios. Este Adjunto es especialmente dirigido a los controladores de tránsito aéreo y los planificadores del espacio aéreo. Adjunto B - Procesos de Datos, se dirige a todos los que participan en la cadena de datos, desde el levantamiento hasta el empaquetado de la base de datos de navegación. Este adjunto ofrece una simple y sencilla explicación de un tema complejo.
OBSERVACIONES ESPECÍFICAS
Este volumen, en gran medida, se basa en las experiencias de los Estados que han utilizado las operaciones RNAV. El concepto PBN descrito en el Volumen I, es una notable excepción, ya que es nuevo y debe ser visto como algo más que una remodelación o una extensión del concepto RNP - véase la Parte A, capítulo 1, descripción de navegación basada en la performance, Este volumen no debe ser leído de forma aislada ya que es tanto una parte integral y complementaria a la del Volumen II, Aplicación de la RNAV y RNP.
Se llama la atención sobre el hecho de que expresiones tales como tipos RNP y valor RNP que se asociaron con el concepto RNP (que se refiere al Doc. 9613, Segunda Edición, anteriormente titulada Manual sobre la performance de navegación requerida (RNP)) no se utilizan bajo el concepto PBN y se suprime en todos los materiales de la OACI.
LA HISTORIA DE ESTE MANUAL
El Comité Especial de Sistemas de navegación aérea del futuro (FANS) identificó que el método más comúnmente utilizado en los años para indicar la capacidad de navegación requerida es obligatorio para prescribir el transporte de ciertos equipos.
Esto limitado a la óptima aplicación de los modernos equipos de a bordo. Para superar este problema, la comisión desarrolló el concepto de capacidad de performance de navegación requerida (RNPC). FANS define RNPC como un parámetro para describir las desviaciones laterales de la trayectoria seleccionada o asignada, así como la posición a lo largo de la trayectoria de la precisión fijada sobre la base de un nivel de contención adecuado.
El concepto RNPC fue aprobado por el Consejo de la OACI y fue asignado a la Revisión del Concepto General de Panel de separación (RGCSP) para más detalles. El RGCSP, en 1990, señalando que la capacidad y el rendimiento fueron claramente diferentes y que la planificación del espacio aéreo depende de la medida de
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xiii)
rendimiento, en lugar de diseñar en la capacidad, RNPC cambio a performance de navegación requerida (RNP).
El RGCSP después desarrolló el concepto RNP, ampliando aún más que sea una declaración de la performance de navegación necesario para el funcionamiento dentro de un espacio aéreo definido. Se propuso que un determinado tipo de RNP debe definir el rendimiento de la navegación de todos los usuarios dentro del espacio aéreo a ser adecuado a la capacidad de navegación disponible en el espacio aéreo. Los tipos de RNP que se identifican mediante un único valor de precisión previsto por FANS. Si bien esto se encuentra adecuado para su aplicación en áreas remotas y oceánicas, la orientación asociada para la separación de rutas no es suficiente para aplicaciones RNAV continental; esto se debió a una serie de factores, incluyendo los ajustes de rendimiento y normas funcionales para los sistemas de navegación de las aeronaves, trabajando dentro de las limitaciones del espacio aéreo disponible, y usando una comunicación más robusta, vigilancia y medio ambiente ATM. También se debe a consideraciones prácticas derivadas desde el desarrollo gradual de la capacidad RNAV junto con la necesidad de obtener beneficios a partir de equipo instalado. Esto dio lugar a diferentes especificaciones de capacidad de navegación con precisión de navegación común. Se señaló que esta evolución es poco probable que ponga fin a la navegación vertical (3D) y navegación en tiempo (4D) evoluciono y Posteriormente, se aplica en la ATM para aumentar la capacidad y la eficiencia del espacio aéreo.
Las consideraciones anteriores han presentado grandes dificultades a las organizaciones responsables para la implementación temprana de las operaciones RNAV en espacio aéreo continental. En la resolución de estos, significante confusión ha desarrollado con respecto a conceptos, terminología y definiciones. En consecuencia, una divergencia de aplicación dio lugar a una falta de armonización entre las aplicaciones RNP.
El 3 de junio de 2003, la Comisión de Aeronavegación de la OACI, al adoptar medidas sobre las recomendaciones de la cuarta reunión de Panel del Sistema Mundial de Navegación por Satélite (GNSSP), designó a la performance de navegación requerida y Grupo de Estudio de Requisitos Operativos Especiales (RNPSORSG) para actuar como centro de coordinación para abordar diversas cuestiones relacionadas con la performance de navegación requerida (RNP).
El RNPSORSG examinó el concepto RNP de la OACI, teniendo en cuenta las experiencias de aplicaciones anteriores, así como las tendencias actuales de la industria, los requisitos de las partes interesadas e implementaciones regionales existentes. Está de acuerdo en la relación entre sistemas RNP y RNAV, la funcionalidad del sistema y las aplicaciones desarrollaron el concepto PBN, que permitirá la armonización mundial de las aplicaciones existentes y crear una base para la armonización de las futuras operaciones.
Si bien este manual proporciona la información sobre el consenso alcanzado en 2D y aplicaciones de aproximaciones RNAV, la experiencia de la RNP a la fecha lleva a la conclusión de que, como aplicaciones en 3D y 4D están desarrolladas, habrá una necesidad de examinar el impacto de esta evolución en el concepto de navegación basada en el rendimiento y actualizar en consecuencia este manual.
Prologo
l-(xiv)
Este manual reemplaza el manual sobre la performance de navegación requerida (RNP) (Doc. 9613, Segunda Edición). En consecuencia, esto afecta a una serie de documentos de la OACI, incluyendo:
Anexo 11 - Servicios de Tránsito Aéreo
Procedimientos para los servicios de navegación aérea – Gestión del Tránsito Aéreo (PANS-ATM) (Doc. 4444)Procedimientos para los servicios de navegación aérea –Operación de aeronaves,
Volúmenes I y II (PANS-OPS) (Doc. 8168)
Procedimientos suplementarios regionales (Doc. 7030)
Manual de planificación de los Servicios de Tránsito Aéreo, (Doc. 9426)
Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de separación (Doc. 9689)
LA EVOLUCIÓN FUTURA
Comentarios sobre este manual se aprecia desde todas las partes implicadas en el desarrollo y aplicación de PBN. Estos comentarios deben ser dirigidos a:
El Secretario General Organización de Aviación Civil Internacional 999 Universidad de la calle Montreal, Quebec, Canadá H3C 5H7
I-(xv)
REFERENCIAS
Nota: Documentos de referencia en este manual se ven afectadas por la navegación
basada en el rendimiento.
Documentos de la OACI
Anexo 4 - Cartas Aeronáuticas
Anexo 6 - Operación de aeronaves,
Parte I - Transporte aéreo comercial internacional - Aviones
Anexo 6 - Operación de aeronaves, Parte II - Aviación general internacional - Aviones
Anexo 8 -Aeronavegabilidad
Anexo 10 - Telecomunicaciones aeronáuticas, Volumen I - Radioayudas para la
navegación
Anexo 11 - Servicios de Tránsito Aéreo
Anexo 15 - Servicios de información aeronáutica
Anexo 17 – Seguridad
Procedimientos para los servicios de navegación aérea - Gestión del Tránsito Aéreo
(PANS-ATM) (Doc. 4444)
Procedimientos para los servicios de navegación aérea - Operación de aeronaves,
Volúmenes I y II (PANS-OPS) (Doc. 8168)
Procedimientos suplementarios regionales (Doc. 7030)
Manual de planificación de Servicios de Tránsito Aéreo, (Doc. 9426)
Manual del Sistema Mundial de Navegación por Satélite (GNSS) (Doc. 9849)
Manual sobre la metodología de planificación del espacio aéreo para determinar las
mínimas de separación (Doc. 9689)
Manual de Pruebas de Radioayudas para la navegación (Doc. 8071)
Manual de gestión de la seguridad (SMM) (Doc. 9859)
Circular 311 (Proyecto), Primera Edición, de Evaluación de la ADS-B en apoyo a los
servicios de tránsito aéreo y las directrices para la aplicación.
Prologo
l-(xvi)
DOCUMENTOS DE LA ORGANIZACIÓN EUROPEA DE EQUIPOS DE AVIACIÓN
CIVIL (EUROCAE)
Especificaciones de rendimiento operacional mínimo de los equipos receptores GPS a
bordo utilizado como Medios Suplementario de la Navegación (ED-72A)
MASPS performance de navegación requerida para la Navegación de área (RNAV)
(ED-75B)
Normas para el procesamiento de datos aeronáuticos (ED-76)
Normas de Información Aeronáutica (ED-77)
Documentos RTCA, Inc.
Normas para el procesamiento de datos aeronáuticos (DO-200A)
Normas de Información Aeronáutica (DO-201A)
Las normas de desempeño Mínimo operativo de navegación a bordo, Adicional los
equipos que utilizan el GPS (DO-208)
Las normas de desempeño Mínimo del sistema de aviación: Performance de
navegación requerida para la Navegación de área (DO-236B)
Documentos Aeronautical Radio, Inc. (ARINC) 424
ARINC 424-15 Especificación del sistema de base de datos de navegación
ARNC 424-16 Especificación del sistema de base de datos de navegación
ARINC 424-17 Especificación del sistema de base de datos de navegación
ARINC 424-18 Especificación del sistema de base de datos de navegación
I-(xvii)
ABREVIATURAS/ACRONIMOS AAIM: Aircraft Autonomous Integrity Monitoring. Comprobación autónoma de la integridad en la aeronave. ABAS: Aircraft Based Augmentation System Sistema de aumentación basado en la aeronave ADS : Automatic Dependant Surveillance Vigilancia dependiente automática AF: DME arc to a fix Arco DME hasta un punto de referencia
AFE: Above Field Elevation Por encima de la elevación del terreno
AFM: Aircraft Flight Manual Manual de Vuelo de la aeronave AFTN: Aeronautical Fixed Telecommunication Network Red de telecomunicaciones fijas aeronáuticas AIP: Aeronautical Information Publication Publicación de información aeronáutica AIRAC: Aeronautical Information Regulation And Control Reglamentación y control de la información aeronáutica
AIS: Aeronautical Information Service Servicios de Información Aeronáutica ANP: Actual Navigation Performance Performance de navegación real ANSP: Air Navigation Service Provider Proveedor de servicio de navegación aérea AP: Auto Pilot Piloto automático
APV: Approach Procedures with Vertical guidance Procedimientos de aproximación con guía vertical AR: Authorization Required Autorización requerida ARINC: Aeronautical Radio, INC Radio aeronáutico incorporado ASE: Altimeter System Error Error del sistema altimétrico ATC: Air Traffic Control Control de tránsito aéreo ATM: Air Traffic Management Gestión del tránsito aéreo ATS: Air Traffic Service Servicios de tránsito aéreo ATT: Along Track Tolerance Tolerancia a lo largo de la derrota AW: Area Width Anchura de área Baro-VNAV: Barometric Vertical Navigation Navegación vertical barométrica BRNAV: Basic RNAV RNAV Básica CA: Course to an Altitude Rumbo hasta una altitud CD: Course to a DME distance Rumbo hasta una distancia DME CDI: Course Deviation Indicator Indicador de desviación respecto al rumbo CDL: Configuration Deviation List Lista de desviaciones respecto a la configuración CDU: Control and Display Unit
Explicación de términos
l-(xviii)
Unidad de control y visualización CFIT: Controlled Flight Into Terrain Vuelo controlado hacia el terreno CI: Course to Intercept Rumbo hasta interceptar CF: Course to a Fix Rumbo hasta un punto de referencia COM: Communications Comunicaciones CRC: Cyclic redundancy check Verificación de redundancia cíclica CR: Course to a VOR Radial Rumbo hasta un radial VOR DA/H: Decision Altitude/Height Altitud/altura de decisión
DER: Departure End of the Runway Extremo de salida de la pista DGPS: Differential Global Positioning System Sistema de Posicionamiento Global Diferencial DF: Direct to a Fix Directo hasta un punto de referencia
DME: Distance Measuring Equipment Equipo Medidor de Distancia DSE: Display System Error Error del Sistema de presentación
DTED: Digital Terrain Elevation Data Datos de elevación digital del terreno
EASA : European Aviation Safety Agency Agencia Europea de Seguridad Aérea ECAC : European Civil Aviation Conference Conferencia de Aviación Civil Europea
ECAM: Electronic Centralized Aircraft Monitoring Vigilancia electronica centralizada de la aeronave ECP: ECAM Control Panel Tablero de control ECAM:
EFIS: Electronic Flight Instrument System Sistema eléctronico de instrumentos de vuelo EGNOS: European Geostationary Navigation Overlay Service Servicio Europeo de complemento geoestacionario de navegación EPE: Estimated Position Error Error estimado de posición ETA: Estimated Time Arrival Hora estimada de llegada
EUROCA: European Organization for Civil Aviation Equipment Organización Europea de Equipos de Aviación Civil EUROCONTROL: Organización Europea
para la Seguridad de la Navegación Aérea FA: Course from a fix to an Altitude Rumbo desde un punto de referencia hasta una altitud FAA: Federal Aviation Administration Administración de aviación federal FAF: Final Approach Fix Punto de referencia de aproximación final FANS: Future Air Navigation System Sistema de navegación aérea para el futuro FAR: Federal Aviation Regulations Regulaciones de la Aviación Federal FAS: Final Approach Segment Segmento de aproximación final
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xix)
FC: Course from a fix to a distance Rumbo desde un punto de referencia hasta una distancia FCU: Flight Control Unit Unidad de control de vuelo FD: Course from a fix to a DME distance Rumbo desde un punto de referencia hasta una distancia DME
FD: Flight Director Director de vuelo FDE: Fault Detection and Exclusion Detección y exclusion de fallas FM: Course from a fix to a manual termination Rumbo desde un punto de referencia hasta una terminación manual FMA: Flight Mode Annunciation Anunciación de modo de vuelo FMC: Flight Management Computer Computadora de gestión de vuelo FMGC: Flight Management Guidance envelope Computer Computador de gestión y guía de vuelo FMGS: Flight Management Guidance envelope System Sistema de gestión y guía de vuelo FMP: Flight Mode Panel Tablero de modo de vuelo FMS: Flight Management System Sistema de gestión de vuelo
FPL: Flight Plan Plan de vuelo
FRT: Fixed radius transition Transición de Radio fijo Ft: Feet Pies
FTE: Flight Technical Error Error técnico de vuelo
FTS: Fast Time Simulation Simulación en Tiempo Rápido FTT: Flight Technical Tolerance Tolerancia técnica de vuelo GAGAN: GPS and GEO Augmented Navigation Navegación aumentada GPS y GEO GALILEO: European Satellite Navigation System Sistema europeo de navegación por satélite GBAS: Ground Based Augmentation System Sistema de aumentación basado en tierra GLONASS: Global Orbiting Navigation Satellite System Sistema mundial de navegación por satélite GLS: GNSS Landing System Sistema de aterrizaje GNSS GNE: Gross Navigation Errors Grandes Errores de Navegación (Error Craso de Navegación) GNSS: Global Navigation Satellite System Sistema mundial de navegación por satélite GPA: Glide Path Angle Angulo de trayectoria de planeo GPS: Global Positioning System Sistema de posicionamiento mundial
GRAS: Ground-based Regional Augmentation System Sistema de Aumentación Regional Basada en Tierra GS: Ground Speed Velocidad de tierra HA: Holding/race track to an Altitude Espera/en hipódromo hasta una altitud
Explicación de términos
l-(xx)
HF: Holding/race track to a Fix Espera/en hipódromo hasta un punto de referencia HM: Holding/race track to a Manual termination Espera/en hipódromo hasta una terminación manual IAC: Instrument Approach Chart Carta de aproximación por instrumentos IAF: Initial Approach Fix Punto de referencia de aproximación inicial IAP: Instrument Approach Procedure Procedimiento de aproximación por instrumentos IF: Intermediate Fix Punto de referencia de aproximación intermedia IF: Initial Fix (ARINC 424) Punto de referencia inicial (ARINC 424) IFP: Instrument Flight Procedure Procedimiento de vuelo por instrumentos IFR: Instrument Flight Rules Reglas de vuelo por instrumentos IMU: Inertial Measurement Unit Unidad de medida inercial INS: Inertial Navigation System Sistema de navegación inercial IRS: Inertial Reference System Sistema de referencia inercial
IRU: Inertial Reference Unit Unidad de referencia inercial ISA: ICAO Standard Atmosphere Atmósfera estándar OACI JAA: Joint Aviation Authorities Autoridades conjuntas de aviación
JAR: Joint Authorities Regulations Regulaciones de las autoridades conjuntas Km: Kilometer Kilómetro LAAS: Local Area Augmentation System Sistema de aumentación de área local LNAV: Lateral NAVigation Navegación lateral LOC: Localizer Localizador LORAN : LOng RAnge Navigation Navegación de largo alcance LPV: Localizer Performance with Vertical guidance Performance del localizador con guía vertical LRNS: Long Range Navigation System Sistema de navegación de largo alcance M: Meter Metro MTSAS : Multi functional Satellite Augmentation System Sistema multifuncional de aumentación satelital
MAHF : Missed Approach Holding Fix Punto de referencia de espera en aproximación frustrada MAPt: Missed Approach Point Punto de aproximación frustrada MCDU: Multifunction Control and Display Unit Control Multifuncional y Unidad de visualización MDA/H : Minimum descent Altitude//Height Altitud/altura mínima de descenso MEA : Minimum En-route Altitude

Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxi)
Altitud mínima en ruta MEL: Minimum Equipment List Lista de equipo mínimo MFCP: MultiFunction Control Panel Tablero de control multifuncional MFDS: MultiFunction Display System Sistema de visualización multifuncional MFDU: MultiFunction Display Unit Unidad de visualización multifuncional
MNPS : Minimum navigation performance specification Especificaciones mínimas de performance de navegación MOC: Minimum Obstacle Clearance Margen mínimo de franqueamiento de obstáculos MOCA: Minimum Obstacle Clearance Altitude Altitud mínima de franqueamiento de obstáculos MSA: Minimum Sector/Safe Altitude Altitud mínima de sector/seguridad
NAA : National airworthiness authority Autoridad nacional de aeronavegabilidad NANUS: Notice Advisories to NAVSTAR Users Aviso y advertencias para los usuarios NAVSTAR (GPS) ND: Navigation Display Visualizador de navegación NM: Nautical Mile Milla nautical NPA: Non Precision Approach Aproximación de no precisión
NSE: Navigation System Error Error del sistema de navegación
OACI: International Civil Aviation Organization Organización de Aviación Civil internacional OCA/H : Obstacle Clearance Altitude/Height Altitud/altura de franqueamiento de obstáculos
OEM : Original Equipment Manufacturer Fabricante de equipos originales PA: Precision Approach Aproximación de precisión PANS OPS: Procedures for Air Navigation Services Procedimientos para los servicios de navegación aérea PBN: Performance Based Navigation Navegación basada en la performance PDE: Path Definition Error Error de definición de trayectoria
PEE: Positioning Estimation Error Estimación de error de posicionamiento PF: Pilot Flying Piloto que vuela PFD: Primary Flight Display Visualizador primario de vuelo PI: Procedure turn to Intercept Viraje de procedimiento hasta interceptar PM: Pilot Monitor Piloto que vigila PMS: Performance Management System Sistema de gestión de performance PRNAV: Precision RNAV RNAV de precisión RAIM: Receiver Autonomous Integrity Monitoring Receptor con supervisión autónoma de la integridad
Explicación de términos
l-(xxii)
RF: Constant Radius arc to a Fix Arco de radio constant hasta un punto de referencia RNAV: Random Navigation (RNAV) Navegación de área (Navegación Aleatoria) RNP: Required Navigation Performance Performance de navegación requerida
RPL: Repetitive Flight Plan Plan de vuelo repetitivo
RTCA : Radio Technical Commission on Aeronautics Comisión Técnica de la Radio Aeronáutica
RTS: Real Time Simulation Simulación en Tiempo Real S: Second Segundo SAAAR : Special Aircraft and Aircrew Authorization Required Autorización especial requerida para aeronave y tripulación de vuelo SBAS: Satellite Based Augmentation System Sistema de aumentación basado en satélites SID: Standard Instrument Departure Salida normalizada por instrumentos STAR: Standar Terminal Instrument Arrival Llegada normalizada por instrumentos
STC: Supplemental Type Certifícate Certificado tipo suplementario SUR: Surveillance Vigilancia TAA: NTerminal Arrival Altitude Altitud de llegada a terminal TF: Track to a Fix Derrota hasta un punto de referencia
TGL : Temporary Guidance Leaflets Folletos de Orientación temporal
TLS : Target Level of Safety Nivel de Seguridad perseguido TMA: Terminal Management Area Área de gestión terminal TSE: Total System Error Error total del sistema TSO: Technical Estándar Order Orden técnica estándar VA: Heading to an Altitude Rumbo hasta una altitud VD: Heading to a DME distance Rumbo hasta una distancia DME VDP: Visual Descent Point Punto visual de descenso VEB: Vertical Error Budget Error vertical presupuestado VI: Heading to Intercept Rumbo hasta interceptar VM: Heading to a Manual termination Rumbo hasta una terminación manual VNAV: Vertical NAVigation Navegación vertical
VOR: Very High Frequency Omni directional Radio Range Radiofaro omnidireccional de muy alta frecuencia. VPA: Vertical Path Angle Angulo de trayectoria vertical VR: Heading to a VOR Radial Rumbo hasta un radial VOR VSS: Visual Segment Surface Superficie del tramo visual

Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxiii)
WAAS: Wide Area Augmentation System Sistema de aumentación de área amplia WGS: World Geodetic System Sistema geodesic mundial WP: Way Point Punto de recorrido XTT: Cross Track Tolerance Tolerancia perpendicular a la derrota
I-(xxiv)
EXPLICACIÓN DE TÉRMINOS
AIRSPACE CONCEPT (CONCEPTO DE ESPACIO AÉREO) Un concepto de espacio aéreo proporciona el esquema y la estructura de operaciones dentro de un espacio aéreo. Los conceptos de espacio aéreo se desarrollan para satisfacer los objetivos estratégicos explícitos como la mejora de la seguridad, aumento de la capacidad del tránsito aéreo, y la mitigación del impacto medioambiental. Conceptos de Espacio aéreo pueden incluir detalles de la práctica organización del espacio aéreo y sus usuarios basados en las hipótesis particulares del CNS/ATM, por ejemplo estructura de rutas ATS, los mínimos de separación, espaciado de rutas y franqueamiento de obstáculos. ACCURACY (PRECISIÓN) Criterio de performance de navegación que consiste en el grado de conformidad entre la posición y/o la velocidad medida o estimada en un momento dado y la posición y/o la velocidad real. Es la capacidad de todo el sistema de mantener la posición de la aeronave dentro de los límites de error del sistema total (TSE = Total System Error), con una probabilidad del 95% en cada punto a lo largo del procedimiento especificado, de forma de que la misma permanezca dentro de los límites exteriores de performance establecidos. ACTUAL NAVIGATION PERFORMANCE (ANP) (PERFORMANCE DE NAVEGACIÓN REAL ) Término usado por la compañía Boeing como una medida del performance real estimado de navegación. El ANP es calculado por la FMC y continuamente comparado con el valor RNP de tal forma que si el ANP excede al RNP la tripulación de vuelo es alertada. AERONAUTICAL FIXED TELECOMMUNICATION NETWORK (AFTN) (RED DE TELECOMUNICACIONES FIJAS AERONÁUTICAS) Sistema completo y mundial de circuitos fijos aeronáuticos dispuestos como parte del servicio fijo aeronáutico, para el intercambio de mensajes y/o datos numéricos entre estaciones fijas aeronáuticas que posean características de comunicaciones idénticas o compatibles. Los mensajes intercambiados por la red AFTN incluyen planes de vuelo, NOTAM, mensajes meteorológicos, administrativos y de servicio, entre otros. AERONAUTICAL INFORMATION REGULATION AND CONTROL (AIRAC) REGLAMENTACIÓN Y CONTROL DE LA INFORMACIÓN AERONÁUTICA Sistema que tiene por objeto la notificación anticipada, basada en fechas comunes de entrada en vigor, a intervalos de 28 días, de las circunstancias que requieren cambios en los métodos de operaciones.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxv)
AERONAUTICAL RADIO, INCORPORATED (ARINC) RADIO AERONÁUTICO INCORPORADO Empresa norteamericana conocida por definir los principales estándares de comunicación al interior de las aeronaves, y entre las aeronaves y la superficie. ARINC 424, uno de sus tantos aportes a la industria aeronáutica, hace referencia a la codificación utilizada para la construcción de bases de datos para la navegación aérea. AID BAROMETRIC AYUDA BAROMÉTRICA Proceso que utiliza información de altitud para simular un satélite GNSS situado directamente sobre la antena del receptor (reduce en uno la cantidad de satélites requeridos para complementar con una determinada función). AIRCRAFT AUTONOMOUS INTEGRITY MONITORING (AAIM) MONITOREO AUTÓNOMO DE LA INTEGRIDAD DE ABORDO Técnica utilizada en los equipos de navegación multisensores que utiliza las propiedades complementarias de los GNSS, y de otros sensores de navegación, principalmente los inerciales, para elaborar un control de integridad más eficiente. Técnica de aumentación de abordo mediante la cual se mejora la disponibilidad de la función de navegación. AIRCRAFT BASED AUGMENTATION SYSTEM (ABAS) SISTEMA DE AUMENTACIÓN BASADO EN LA AERONAVE Sistema de corrección compuesta por técnicas de control de integridad que aumentan y/o integran la información obtenida de otros elementos GNSS con información disponible a bordo de la aeronave. Entre los sistemas más comunes que otorgan esta aumentación a los receptores GPS están los sistemas RAIM, FDE y AAIM. Sistemas de aumentación incorporados en los equipos GNSS de abordo de la aeronave, que pueden ser del tipo RAIM o AAIM. AIR NAVIGATION SERVICE PROVIDER (ANSP) PROVEEDOR DE SERVICIO DE NAVEGACIÓN AÉREA Cualquier entidad, pública o privada, que se encargue de la prestación de los servicios de navegación aérea para la circulación aérea general. AIR TRAFFIC FLOW MANAGEMENT GESTIÓN DE LA AFLUENCIA DEL TRÁNSITO AÉREO (ATFM) Servicio cuyo objetivo es garantizar un movimiento óptimo del tránsito aéreo hacia o a través de zonas durante las horas en que la demanda excede o se prevé que exceda la capacidad disponible del sistema ATC. AIR TRAFFIC MANAGEMENT (ATM) GESTIÓN DEL TRÁNSITO AÉREO Agrupación de las funciones, tanto en tierra como en el aire, necesarias para satisfacer las crecientes necesidades de tipo operacional, trayendo consigo seguridad y economía para todos los usuarios.
Explicación de términos
l-(xxvi)
ALONG TRACK TOLERANCE (ATT) TOLERANCIA PARALELA A LA DERROTA Tolerancia de un punto de referencia a lo largo de la derrota nominal resultante de las tolerancias de los equipos de a bordo y de tierra. ALTIMETER SYSTEM ERROR (ASE) ERROR DEL SISTEMA ALTÍMETRICO Diferencia entre la altitud indicada por el altímetro, asumiendo un reglaje barométrico del altímetro, y la altitud de presión correspondiente a la presión ambiente sin perturbaciones. APPROACH PROCEDURE WITH VERTICAL GUIDANCE (APV) PROCEDIMIENTO DE APROXIMACIÓN CON GUÍA VERTICAL Procedimiento de aproximación por instrumentos en el que se utiliza guía de navegación lateral y vertical, pero que no satisface los requisitos establecidos para las operaciones de aproximación y aterrizaje de precisión. AREA NAVIGATION ROUTE RUTA DE NAVEGACIÓN DE ÁREA Una ruta ATS establecida para el uso de aeronaves capaces de emplear la navegación de Área. AREA NAVIGATION (RNAV – RANDOM NAVIGATION) NAVEGACIÓN DE ÁREA Método de navegación que permite la operación de aeronaves en cualquier trayectoria de vuelo deseada, dentro de la cobertura de las ayudas para la navegación referidas a la estación (VOR/DME, DME/DME, LORAN C, GNSS), o dentro de los límites de las posibilidades de las ayudas autónomas (INS/IRS), o de una combinación de ambas. AUGMENTATION AUMENTACIÓN Técnica que provee al sistema con datos de entrada (input), además de aquellos derivados de la(s) principal(es) constelación(es) en servicio, para proporcionar una nueva información de distancia, o correcciones o mejoras de los datos de entrada. Esto permite que el sistema mejore la performance en relación con la que se obtendría solamente con la información básica (raw data) de los satélites. AUTHORIZATION REQUIRED (AR) AUTORIZACIÓN REQUERIDA Sufijo utilizado en un procedimiento RNP para indicar que una autorización previa de la aeronave y de la tripulación de vuelo es requerida. Equivale al sufijo SAAAR utilizado por la FAA. AUTOMATIC DEPENDENT SURVEILLANCE (ADS) VIGILANCIA DEPENDIENTE AUTOMÁTICA
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxvii)
Técnica de vigilancia por la que una aeronave transmite automáticamente, vía enlace de datos, parámetros extraídos de los sistemas de navegación y posicionamiento de a bordo. La técnica ADS proporciona la identificación de la aeronave, la posición de la aeronave en cuatro dimensiones e información adicional, como la intención de vuelo. AUTOMATIC RADIO POSITION UPDATING ACTUALIZACIÓN AUTOMÁTICA DE POSICIÓN Cualquier procedimiento de actualización que no requiere la inserción de coordenadas por parte de la tripulación de vuelo. La actualización automática es aceptable a condición de que sea aprobada por la Autoridad Aeronáutica competente y, además, que los procedimientos de actualización automática se encuentren incluidos en el programa de entrenamiento del operador y las tripulaciones de vuelo sean conocedoras de estos procedimientos y de sus efectos en el tiempo límite. AUTONOMOUS NAVIGATION NAVEGACIÓN AUTÓNOMA Navegación en la que no se requiere de infraestructura alguna al exterior de la aeronave para realizar un vuelo. En este tipo de navegación es necesario partir de una posición conocida y, a fin de reducir las limitaciones de la misma, cotejar, cada cierto tiempo, la posición de la aeronave utilizando otro tipo de navegación. La navegación autónoma más comúnmente utilizada es la inercial. AVAILABILITIY DISPONIBILIDAD La disponibilidad de un sistema de navegación es el porcentaje de tiempo en el que son utilizables los servicios del sistema. La disponibilidad es una indicación de la capacidad del sistema para proporcionar servicio útil dentro de una determinada zona de cobertura. La disponibilidad de señales es el porcentaje de tiempo en que se transmiten señales de navegación desde fuentes externas para ser utilizadas. La disponibilidad es función de las características físicas del entorno y de la capacidad técnica de las instalaciones de transmisores. BARO – VNAV APRROACH PROCEDURES PROCEDIMIENTOS DE APROXIMACIÓN BARO – VNAV Procedimiento de aproximación por instrumentos en el que se utiliza guía vertical de navegación. Se clasifican como procedimientos de aproximación por instrumentos en apoyo a operaciones de aproximación y aterrizaje con guía vertical. La guía vertical, que nominalmente es de 3º, es calculada por la FMC. BASIC RNAV (BRNAV) NAVEGACIÓN DE ÁREA BASICA Método de navegación de área equivalente a RNAV-5, que requiere del equipo de a bordo una precisión de navegación lateral y longitudinal en ruta de ± 5 NM o superior durante el 95% del tiempo de vuelo. Este nivel de precisión se puede conseguir mediante DME/DME, GNSS, VOR/DME o con sistemas inerciales. CONFIGURATION DEVIATION LIST (CDL)
Explicación de términos
l-(xxviii)
LISTA DE DESVIACIONES RESPECTO A LA CONFIGURACIÓN Lista establecida por el organismo del diseño tipo de la aeronave, con aprobación de la Autoridad Aeronáutica competente del Estado de diseño, fabricación o certificación, en la que figuran las partes exteriores de un tipo específico de aeronave de las que podría prescindirse al inicio de un vuelo y que incluye, de ser necesario, cualquier información relativa a las consiguientes limitaciones respecto a la operación y corrección de performance de la misma. CONTINUITY CONTINUIDAD Es la capacidad del sistema de funcionar sin interrupción durante la operación prevista. El riesgo de continuidad es la probabilidad de que el sistema se interrumpa y no proporcione información de guía para la operación prevista. COURSE DEVIATION INDICATOR INDICADOR DE DESVIACIÓN DE CURSO Instrumento de aviónica utilizado para determinar la posición lateral de una aeronave con relación a una derrota. La deflexión señalada por el indicador de curso es proporcional a la desviación de la derrota, pero su sensibilidad es proporcional al sistema utilizado. Por ejemplo, cuando se utiliza GNSS la deflexión indica el desvió en NM con respecto a una derrota deseada, mientras que cuando se utiliza un VOR, la deflexión indica el desvió en grados. CROSS TRACK TOLERANCE (XTT) TOLERANCIA PERPENDICULAR A LA DERROTA Tolerancia de un punto de referencia medida perpendicularmente a la derrota nominal, resultante de las tolerancias de los equipos de a bordo y de tierra, y de la tolerancia técnica de vuelo. CYCLIC REDUNDANCY CHECK (CRC) VERIFICACIÓN DE REDUNDANCIA CÍCLICA Un algoritmo matemático aplicado a la expresión digital de los datos que proporciona un nivel de seguridad contra la pérdida o alteración de datos. DATA BASE BASE DE DATOS Se refiere a las referencias de navegación que posee la computadora en su memoria, editada por una agencia oficial para el uso en aviación civil, la cual debe contener por lo menos ayudas para la navegación, puntos de recorrido y procedimientos que cubran las necesidades de navegación de la región que se intenta operar, considerando rutas de llegada y de salida. También puede tener la capacidad de aceptar el ingreso de otros datos adicionales por la tripulación definidos como puntos de recorrido y la capacidad de almacenar planes de vuelo. DEAD RECKONING NAVEGACIÓN A ESTIMA
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxix)
Método de navegación utilizado para determinar la posición de una aeronave basándose en el uso de la velocidad, el tiempo y el rumbo, a partir de la última posición conocida. La precisión de este tipo de navegación depende de lo mucho que se aproxime el viento empleado en los cálculos al viento real que encuentre la aeronave y de la precisión con que el piloto mantenga el rumbo calculado. DISPLAY SYSTEM ERROR (DSE) ERROR DEL SISTEMA DE PRESENTACIÓN Incluye componentes de error provocados por cualquier entrada, salida o equipo de conversión de señales utilizado por el dispositivo de presentación cuando muestra cualquier posición de aeronave u órdenes de guiado, y por cualquier dispositivo de inserción de rumbo empleado. DME CRITIC DME CRÍTICO Facilidad que la Autoridad Aeronáutica ha establecido como indispensable para efectuar una operación de tipo RNAV o RNP. ESTIMATED POSITION ERROR (EPE) ERROR ESTIMADO DE POSICIÓN Término utilizado por Airbus como una medida del performance de navegación actual. El EPE es calculado por la FMC y continuamente comparado con el valor RNP de tal forma que si el EPE excede al RNP la tripulación de vuelo es alertada. Nota: El EPE (Término utilizado por Airbus) es igual al ANP (Término usado por la compañía Boeing) EUROPEAN GEOSTATIONARY NAVIGATION OVERLAY SERVICE (EGNOS) SERVICIO EUROPEO DE COMPLEMENTO GEOESTACIONARIO DE NAVAEGACIÓN Sistema de aumentación basado en satélites que proporciona servicios de navegación que cumplen los requisitos del Anexo 10 de la OACI, en la región Europa. FAULT DETECTION AND EXCLUSION (FDE) DETECCIÓN Y EXCLUSIÓN DE FALLAS (FDE) Función del receptor/procesador GPS de a bordo que permite detectar el fallo de un satélite que afecte a la capacidad de navegación y excluirlo automáticamente del cálculo de la solución de navegación. FLIGHT MANAGEMENT SYSTEM (FMS) SISTEMA DE GESTIÓN DE VUELO Sistema de navegación integrado que consiste en sensor, receptor y computadora de a bordo con bases de datos de navegación y de performance de la aeronave, que proporciona una guía de performance óptima en una pantalla y en el sistema de mando automático de vuelo. Dicho término también se emplea para describir cualquier sistema que proporcione alguna clase de asesoramiento a la capacidad para controlar directamente los aspectos relativos a la navegación, la gestión del combustible, la planificación de rutas, etc. Estos sistemas también suelen describirse como sistemas de
Explicación de términos
l-(xxx)
gestión de la performance, sistemas de control de gestión de vuelo y sistemas de gestión de la navegación. FLIGHT TECHNICAL ERROR (FTE) ERROR TÉCNICO DE VUELO (FTE) Es la precisión con la que se controla la aeronave, la cual puede medirse comparando la posición indicada de la aeronave con el mando indicado o con la posición deseada. No incluye errores de mal funcionamiento. FLY – BY WAY POINT (FLY – BY WP) PUNTO DE RECORRIDO DE PASO Punto de recorrido que requiere anticipación del viraje para que pueda realizarse la interceptación tangencial del siguiente tramo de una ruta o procedimiento. FLY – OVER WAY POINT (FLY – OVER WP) PUNTO DE RECORRIDO DE SOBREVUELO Punto de recorrido en el que se inicia el viraje para incorporarse al siguiente tramo de ruta o procedimiento. FREE FLIGHT VUELO DE LIBRE OPCIÓN / VUELO AUTÓNOMO Sistema ATM aplicado en los Estados Unidos de América, que permite a los pilotos, en donde sea posible, elegir su propia ruta y presentar un plan de vuelo que contenga la ruta más eficiente y económica. GALILEO Iniciativa europea surgida para desarrollar un sistema GNSS, de titularidad civil, que proporcione a Europa independencia respecto al GPS y al GLONASS. GLOBAL NAVIGATION SATELLITE SYSTEM (GNSS) SISTEMA MUNDIAL DE NAVEGACIÓN POR SATÉLITE Nombre dado por la OACI a un sistema mundial de determinación de la posición y de la hora que incluye una o más constelaciones de satélites, receptores de aeronave y vigilancia de la integridad del sistema, aumentado según sea necesario, para apoyar la performance de navegación requerida correspondiente a la fase efectiva de operación. Los servicios de medición de distancias del GNSS serán proporcionados, por lo menos en un plazo mediano, por el GPS y el GLONASS. GLOBAL ORBITING NAVIGATION SATELLITE SYSTEM (GLONASS) SISTEMA MUNDIAL DE NAVEGACIÓN POR SATÉLITE Sistema GNSS desarrollado por Rusia y que representa la contrapartida al GPS de los Estados Unidos y al GALILEO europeo. El sistema está a cargo del Ministerio de Defensa de la Federación Rusa. Sistema de navegación basado en la transmisión de señales desde satélites, y disponible para usuarios de la aviación civil. GLOBAL POSITIONING SYSTEM (GPS)
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxxi)
SISTEMA DE POSICIONAMIENTO MUNDIAL Sistema GNSS que permite determinar en todo el mundo la posición de un objeto, persona, un vehículo o una nave, con una alta precisión. Aunque su invención se le atribuye a los gobiernos de Francia y Bélgica, el sistema fue desarrollado e instalado, y actualmente es operado, por el Departamento de Defensa de los Estados Unidos de América. GPS EQUIPMENT I.F.R. EQUIPOS GPS I.F.R. El equipo GPS para vuelos I.F.R. está categorizado dentro de las siguientes clases, de Acuerdo a la Orden TSO-129a de la FAA: Clase A - El equipo incorpora el sensor GPS y la capacidad de navegación. También incorpora la técnica RAIM.
Clase A1 - Incluye capacidad en ruta, área terminal y aproximaciones de no precisión.
Clase A2 - Incluye sólo capacidad en ruta y área terminal.
Clase B - El equipo consiste de un sensor GPS que le provee información a un sistema de navegación integrado (FMS, Sistema de Navegación Multi-Sensor, etc.)
Clase B1 - Incluye RAIM y provee capacidad en ruta, área terminal y aproximaciones de no-precisión.
Clase B2 - Incluye RAIM y sólo capacidad en ruta y área terminal.
Clase B3 - Requiere que el sistema integrado de navegación provea un nivel de integridad GPS equivalente a RAIM y es apto para operaciones en ruta, área terminal y aproximaciones de no-precisión.
Clase B4 - Requiere que el sistema integrado de navegación prevea un nivel de integridad GPS equivalente a RAIM y provee capacidad sólo en ruta y área terminal.
Clase C - El equipo consiste de un sensor GPS que provee datos a un sistema integrado de navegación (FMS, Sistema Multi-Sensor de Navegación, etc.) que brinda guía mejorada a un piloto automático o director de vuelo, de forma de reducir los errores técnicos de vuelo.
Clase C1 - Incluye RAIM y provee capacidad para ruta, área terminal y aproximaciones de no-precisión.
Clase C2 - Incluye RAIM y provee sólo capacidad para ruta y área terminal.
Clase C3 - Requiere que el sistema integrado de navegación provea un nivel de integridad GPS equivalente a RAIM y es apto para usar en operaciones en ruta, área terminal y aproximaciones de no-precisión.
Clase C4 - Requiere que el sistema de navegación integrado provea un nivel de integridad GPS equivalente a RAIM y provee sólo capacidad en ruta y área terminal.
Explicación de términos
l-(xxxii)
GEOCENTRIC Geocéntrico Relativo al centro de la Tierra, medido desde el centro de la Tierra. GEODESY Geodesia La ciencia relacionada con la determinación del tamaño y la forma de la Tierra (geoide) por mediciones directas tales como triangulación, nivelación y observaciones gravimétricas; por las que se determina el campo gravitacional externo de la Tierra y, hasta un cierto grado, la estructura interna. GEOSTATIONARY GEOESTACIONARIO Una órbita ecuatorial de satélite que lleva a una posición constante fija del satélite por encima de un punto particular de referencia en la superficie de la Tierra (los satélites GPS no son geoestacionarios). En los Sistemas de Aumentación Basados en satélites se utilizan satélites geoestacionarios. Esta orbita se encuentra aproximadamente a 36.000 Km. de la superficie terrestre. GNSS LANDING SYSTEM (GLS) SISTEMA DE ATERRIZAJE GNSS Identifica los mínimos de un procedimiento de aproximación RNAV de precisión que cuenta con guía lateral y vertical de navegación. La guía vertical es proporcionada por un sistema de aumentación SBAS o GBAS. GROSS NAVIGATION ERROR (GNE) GRANDES ERRORES DE NAVEGACIÓN Errores de navegación excesivos notificados por los pilotos, los operadores o por el ATC, que luego son investigados con el fin de prevenir su recurrencia. Se consideran errores excesivos de navegación:
a) Errores laterales de 15 NM o más.
b) Errores longitudinales de 10 NM o más.
c) Errores longitudinales de 3 minutos o más entre la hora estimada de llegada de
la d) aeronave a un punto de reporte y su hora real de llegada.
e) Fallas en el sistema de navegación.
GROUND BASED AUGMENTATION SYSTEM (GBAS) SISTEMA DE AUMENTACIÓN BASADO EN TIERRA Sistema de corrección y aumentación de señales de los sistemas GNSS a través de una red de receptores terrestres que transmiten en las bandas VHF y UHF, y de los cuales se conoce su posición precisa. Una vez corregida la señal transmite la información directamente a los usuarios finales. GBAS se diferencia de los sistemas SBAS en que no depende de satélites geoestacionarios debido a que no está diseñado
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxxiii)
para dar servicio sobre amplias regiones geográficas. Su precisión permite efectuar operaciones RNAV en área terminal, aproximaciones de precisión de categoría II y III, e incluso la realización de aterrizajes automáticos. INERTIAL NAVIGATION SYSTEM (INS) SISTEMA DE NAVEGACIÓN INERCIAL Sistema de navegación autónomo que basa su funcionamiento en el posicionamiento relativo a partir de la integración de las aceleraciones registradas por los acelerómetros, utilizando las velocidades angulares de los giróscopos para determinar la dirección del recorrido. Al conjunto de sensores inerciales se le conoce como unidades de medida inercial (IMU) que, junto con las ecuaciones de mecanización, conforman el INS. Debido a que dichos sensores no realizan un posicionamiento perfecto, en los cálculos se van introduciendo errores acumulativos que deben ser corregidos mediante fuentes externas al cabo de cierto tiempo de vuelo. Equipo de navegación autónomo que utiliza uno o más sensores de navegación inercial para determinar la posición de la aeronave siguiendo con precisión todos los movimientos de la misma, a partir de un punto de comienzo conocido .La precisión de un sensor inercial se degrada a través del tiempo. La posición obtenida con un sistema inercial se puede degradar a un promedio de 2 NM por hora en vuelos de más de 10 horas de duración. INERTIAL REFERENCE SYSTEM (IRS) SISTEMA DE REFERENCIA INERCIAL Sistema de navegación autónomo que sensa cambios instantáneos en la aceleración de la aeronave con el fin de proveer información de navegación con referencia a un punto de inicio conocido. Debido a que dichos sensores no realizan un posicionamiento perfecto, en los cálculos se van introduciendo errores acumulativos que deben ser corregidos mediante fuentes externas al cabo de cierto tiempo de vuelo. Equipo de navegación que determina la posición de la aeronave detectando las aceleraciones de la misma con una plataforma giroestabilizada y que proporciona información al equipo RNAV. INERTIAL REFERENCE UNIT (IRU) UNIDAD DE REFERENCIA INERCIAL Tipo de sensor inercial que utiliza únicamente giróscopos para determinar el movimiento de la aeronave, o la variación angular de la misma, en un período de tiempo. A diferencia de las unidades de medida inercial (IMU), las IRUs normalmente no son equipadas con acelerómetros, los cuales miden fuerzas de aceleración. INTEGRITY INTEGRIDAD Criterio de performance de navegación que consiste en la capacidad del sistema para asegurar que el conjunto de sus funciones está dentro de los límites operacionales. La integridad comprende la capacidad de un sistema para proporcionar advertencias oportunas y válidas al usuario en los casos en que el sistema no debe utilizarse para la operación prevista.
Explicación de términos
l-(xxxiv)
LATERAL NAVIGATION (LNAV) NAVEGACIÓN LATERAL Identifica los mínimos de un procedimiento de aproximación RNAV de no precisión con guía lateral únicamente. LOCAL AREA AUGMENTATION SYSTEM (LAAS) SISTEMA DE AUMENTACIÓN DE AREA LOCAL Sistema de aterrizaje para aeronaves basado en la corrección diferencial, en tiempo real, de la señal GPS. Receptores locales de referencia GPS envían información a un sistema central. Dicha información es utilizada para formar un mensaje de corrección, que es transmitido a las aeronaves por intermedio de enlace de datos VHF. Un receptor a bordo de la aeronave utiliza la información para corregir la señal GPS permitiendo la realización de aproximaciones de precisión Categoría I, y en un futuro próximo de Categoría II y III. El LAAS es uno de los tantos sistemas GBAS. LOCALIZER PERFORMANCE WITH VERTICAL GUIDANCE (LPV) PERFORMANCE DEL LOCALIZADOR CON GUIA VERTICAL Identifica los mínimos de un procedimiento de aproximación con guía vertical cuya guía lateral y vertical es proporcionada electrónicamente. La guía lateral es equivalente al localizador (LOC), y el área protegida es mucho más pequeña que aquellas relacionadas con los mínimos LNAV y LNAV/VNAV. La guía vertical es proporcionada por un sistema de aumentación satelital, SBAS o GBAS. LONG RANGE NAVIGATION (LORAN) NAVEGACIÓN DE LARGO ALCANCE Sistema electrónico de navegación hiperbólica de largo alcance que utiliza el intervalo transcurrido entre la recepción de señales de radio transmitidas desde tres o más transmisores para determinar la posición del receptor. La versión más moderna es el LORAN–C el cual se encuentra en decadencia debido a la rápida implementación de los sistemas GNSS. LONG RANGE NAVIGATION SYSTEM (LRNS) SISTEMA DE NAVEGACIÓN DE LARGO ALCANCE Sistema mundial de navegación que utiliza ondas de radio en baja y media frecuencia. Los más conocidos son el OMEGA, LORAN – A y LORAN – C. MANUAL RADIO POSITION UPDATING ACTUALIZACIÓN MANUAL DE POSICIÓN Cualquier procedimiento de actualización que requiere la inserción de coordenadas por parte de la tripulación de vuelo. La actualización manual es aceptable siempre que medie un estudio particular y este sea aprobado por la Autoridad Aeronáutica y, además, los operadores demuestren que sus procedimientos de actualización y entrenamiento incluyen medidas de chequeo cruzado para prevenir posibles errores cometidos por la tripulación. MINIMUM EQUIPMENT LIST (MEL) LISTA DE EQUIPO MÍNIMO
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxxv)
Lista que debe ser aprobada por la Autoridad Aeronáutica, con el mínimo de equipo suficiente para el funcionamiento de una aeronave a reserva de determinadas condiciones cuando parte del equipo no funciona. Esta lista debe ser prepara da por el operador y/o explotador de conformidad con la lista maestra de equipo mínimo (MMEL), establecida para el tipo de aeronave de conformidad con criterios más restrictivos. MINIMUM OBSTACLE CLEARANCE (MOC) MARGEN MÍNIMO DE FRANQUEAMIENTO DE OBSTÁCULOS Cantidad mínima de franqueamiento vertical que debe existir entre una aeronave y el obstáculo más prominente dentro del área de evaluación de obstáculos del segmento de una ruta, de un procedimiento de aproximación por instrumentos o de un procedimiento de salida por instrumentos. El franqueamiento vertical se establece generalmente en pies y su valor depende de la fase de vuelo. MIXED NAVIGATION ENVIRONMENT AMBIENTE MIXTO DE NAVEGACIÓN Un entorno en el que las diferentes especificaciones de navegación se pueden aplicar en el mismo espacio aéreo (por ejemplo, las rutas RNAV-10 (RNP-10) y RNP-4 rutas en el mismo espacio aéreo), o cuando en las operaciones se utiliza navegación convencional se permiten en el mismo espacio aéreo con aplicaciones RNAV o RNP. MOUNTAINOUS AREA ÁREA MONTAÑOSA Zona con perfil de terreno cambiante, en la cual las variaciones de elevación del terreno exceden de 3000 ft dentro de una distancia de 10 NM. MULTICHANNEL RECEIVER RECEPTOR MULTICANAL Un receptor GPS que puede simultáneamente recibir más de una señal satelital. MULTIFUNCTIONAL TRANSPORT SATELLITE (MTSAT) SATÉLITE DE TRANSPORTE MULTIFUNCIONAL Satélite geoestacionario japonés que tiene una misión meteorológica y una misión aeronáutica, que puede incluir capacidad ADS, enlace de datos y un canal de integridad/superposición GPS. NAVIGATION APPLICATION APLICACIÓN DE NAVEGACIÓN La aplicación de una especificación de navegación y el soporte de la infraestructura de ayunas a la navegación, rutas, procedimientos, y/o volumen definido de espacio aéreo, de conformidad con el concepto de espacio aéreo. Nota: La aplicación de navegación es un elemento, junto con la comunicación, la vigilancia y la ATM que se ajusten a los objetivos estratégicos en un concepto definido de espacio aéreo. NAVIGATION AID (AYUDAS A LA NAVEGACIÓN) INFRASTRUCTURE INFRAESTRUCTURA DE AYUDAS A LA NAVEGACIÓN
Explicación de términos
l-(xxxvi)
Infraestructura de navegación se refiere a las ayudas de navegación, situadas en la tierra o en el espacio, disponibles para satisfacer los requisitos en las especificaciones de navegación. NAVIGATION FUNCTION FUNCIÓN DE NAVEGACIÓN Las disposiciones de la capacidad del sistema de navegación (tales como la ejecución de transiciones de tramos o segmentos, paralelamente la capacidad de compensar, patrones de espera, las bases de datos de navegación) requeridos para satisfacer el concepto de espacio aéreo. Nota: Los requisitos funcionales de navegación son uno de los conductores para la selección de una especificación de la navegación en particular. Las funcionalidades de navegación (requisitos funcionales) para cada especificación de navegación se pueden encontrar en el Volumen II, las partes B y C del Documento 9613 PBN NAVIGATION SPECIFICATION ESPECIFICACIONES DE NAVEGACIÓN Conjunto de requisitos necesarios, en la aeronave y en la tripulación de vuelo, para soportar las operaciones de navegación basadas en performance dentro de un espacio aéreo definido. Hay dos tipos de especificación de navegación: RNAV y RNP. Una especificación RNAV no incluye requisitos de vigilancia de performance y alerta a bordo. Una especificación RNP incluye requisitos de vigilancia de performance y alerta a bordo. NAVIGATION SYSTEM ERROR (NSE) ERROR DEL SISTEMA DE NAVEGACIÓN Corresponde a la raíz cuadrada de la suma de los cuadrados del error de la estación terrestre, del error del receptor de a bordo y del error del sistema de presentación. OCEANIC AIR SPACE ESPACIO AÉREO OCEÁNICO Espacio aéreo sobre área oceánica, considerado espacio aéreo internacional y donde se aplican los procedimientos y separaciones establecidos por OACI. PARALLEL OFFSET TRAYECTORIA PARALELA Capacidad que posee un navegador para volar fuera de ruta en forma paralela a ella, con derrotas definidas por los puntos de recorrido de esa ruta. Se emplea normalmente para secciones de vuelo en ruta y no para áreas terminales. PATH DEFINITION ERROR (PDE) ERROR DE DEFINICIÓN DE TRAYECTORIA Diferencia entre la trayectoria definida y la trayectoria deseada en un punto específico y en un instante determinado. PATH TERMINATOR
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxxvii)
TERMINACIÓN DE TRAYECTORIA Código de dos letras que determina un tipo especifico de trayectoria de vuelo en un tramo de un procedimiento y un tipo específico de terminación de esa trayectoria de vuelo. Las terminaciones de trayectorias se asignan a todos los segmentos de procedimientos RNAV, SID, STAR y de aproximación en una base de datos de navegación de a bordo. (ARINC 424-15/17). PERFORMANCE BASED NAVIGATION (PBN) NAVEGACIÓN BASADA EN PERFORMANCE Especifica los requisitos de performance del sistema para la operación de una aeronave a lo largo de una ruta ATS, en un procedimiento de aproximación por instrumentos o en un espacio aéreo especificado. PERFORMANCE MANAGEMENT SYSTEM (PMS) SISTEMA DE GESTION DE PERFORMANCE Computadora para el manejo del performance de la aeronave en su conjunto que incorpora en su memoria todos los datos de la aeronave y de los motores, inclusive puede manejar factores de degradación aerodinámica o limitaciones de motor. PRECISION AREA NAVIGATION (PRNAV) NAVEGACIÓN DE ÁREA DE PRECISIÓN Método de navegación de área equivalente a RNAV-1, que requiere del equipo de a bordo una precisión de navegación lateral y longitudinal en ruta de ± 1 NM o superior durante el 95% del tiempo de vuelo. Este nivel de precisión se puede conseguir mediante DME/DME, GNSS ó VOR/DME. También se puede mantener durante cortos períodos usando sistemas inerciales. PRIMARY AREA ÁREA PRIMARIA Área definida, dispuesta simétricamente a ambos lados de la derrota nominal de vuelo, en la cual hay que garantizar el margen de franqueamiento de obstáculos en un cien por ciento 100%. PSEUDOSISTANCE PSEUDODISTANCIA Distancia entre un receptor y un satélite GNSS a la que se añade un término desconocido que tiene en cuenta el error de sincronización del reloj del receptor. RADIO AERONAUTICO INC (ARINC) RADIO AERONÁUTICO INC Red de radio internacional que provee comunicaciones aire – tierra disponible bajo una subscripción básica. RECEIVER AUTONOMOUS INTEGRITY MONITORING (RAIM) MONITOREO AUTÓNOMO DE LA INTEGRIDAD DEL RECEPTOR Técnica de aumentación de abordo por la cual un receptor/procesador GPS determina la integridad de las señales de navegación GPS usando sólo señales GPS, o dichas
Explicación de términos
l-(xxxviii)
señales aumentadas con información de altitud. Esta determinación es obtenida por medio de una verificación constante de las señales recibidas. Por lo menos otro satélite, además de aquellos usados con fines de navegación, deberá estar al alcance del receptor para que RAIM se efectúe. Nota: Para esta función se requieren tener a la vista como mínimo cinco (05) satélites o cuatro con ayuda barométrica. REQUIRED NAVIGATION PERFORMANCE (RNP) PERFORMANCE DE NAVEGACIÓN REQUERIDA Declaración de la performance de navegación necesaria para operar dentro de un espacio aéreo definido. El performance de navegación requerida se especifica en términos de precisión, integridad y disponibilidad de las señales de navegación y del equipo para un espacio aéreo particular, ruta, procedimiento u operación. RNAV DME/DME NAVEGACION DE AREA DME/DME Se refiere a la navegación que utiliza información DME de al menos dos equipos DME para determinar la posición de la aeronave. RNAV DME/DME/IRU NAVEGACIÓN DE ÁREA DME/DME/IRU Se refiere a la navegación que utiliza información DME de al menos dos equipos DME junto con una IRU con el fin de determinar la posición de la aeronave durante los vacíos limitados de información proporcionada por las estaciones DME. RNAV OPERATIONS OPERACIONES RNAV Operaciones de aeronaves que usan navegación de área para aplicaciones RNAV. Las operaciones RNAV incluyen el uso de navegación de área para aquellas operaciones que no son desarrolladas según lo prescrito en el manual PBN de la OACI. RNAV SYSTEM SISTEMA DE NAVEGACIÓN DE ÁREA (RNAV) Método de navegación que permite la operación de aeronaves en cualquier trayectoria de vuelo conveniente dentro de la cobertura de las ayudas para la navegación terrenas, o dentro de los límites de capacidad de ayudas autónomas, o una combinación de éstas. La RNAV que sólo utiliza las capacidades en el plano horizontal, es llamada navegación de área en dos dimensiones (2D RNAV). La RNAV que incorpora guía vertical es llamada 3D RNAV o VNAV. Si se agrega la navegación por tiempo (TNAV) a los sistemas 3D, éstos pasarán a denominarse 4D RNAV. RNP OPERATIONS OPERACIONES RNP Operaciones de aeronaves que usan un sistema RNP para aplicaciones RNP. RNP SYSTEM RNP SYSTEM
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xxxix)
Sistema de navegación de área (RNAV) el cual descansa sobre la vigilancia del performance y la alerta a bordo. RNP ROUTE RUTA RNP Una ruta ATS establecida para el uso de las aeronaves que se adhieren a una especificación de navegación RNP RNP SYSTEM SISTEMA RNP Un sistema de navegación de área (RNAV) que soporta la vigilancia de performance y alerta REQUIRED NAVIGATION PERFORMANCE (RNP) PERFORMANCE DE NAVEGACIÓN REQUERIDA Indicación de los parámetros de performance de la navegación necesarios para la operación dentro de un espacio aéreo definido. La OACI especifica la performance de navegación pero ningún tipo de equipo en especial. REQUIRED TOTAL SYSTEM PERFORMANCE (RTSP) PERFORMANCE TOTAL REQUERIDA DEL SISTEMA Patrón por el cual se mide la performance de todos los elementos constitutivos del sistema CNS. Incluye la Performance de Comunicaciones Requerida, la Performance de Navegación Requerida y la Performance de Vigilancia Requerida. SATELLITE BASED AUGMENTATION SYSTEM (SBAS) SISTEMA DE AUMENTACIÓN BASADO EN SATÉLITES Sistema de corrección de señales que los sistemas GNSS transmiten al receptor GPS del usuario. Los sistemas SBAS mejoran el posicionamiento horizontal y vertical del receptor y dan información sobre la calidad de las señales. Su precisión permite efectuar operaciones RNAV en área terminal y aproximaciones de precisión de categoría I. Actualmente se están desarrollados o en fase de implementación el WAAS (Estados Unidos de América), EGNOS (Agencia Espacial Europea), MTSAS (Japón) y GAGAN (India) SECONDARY AREA ÁREA SECUNDARIA Área definida, dispuesta a ambos lados del área primaria y situada a lo largo de la derrota nominal de vuelo, en la cual se proporciona un margen decreciente de franqueamiento de obstáculos. SPECIAL AIRCRAFT AND AIRCREW AUTHORIZATION REQUIRED (SAAAR) AUTORIZACIÓN ESPECIAL REQUERIDA PARA AERONAVE Y TRIPULACIÓN Sufijo utilizado por la Administración de Aviación Federal (FAA) en un procedimiento RNP para indicar que una autorización previa de la aeronave y de la tripulación de vuelo es requerida. Es equivalente al sufijo AR (AUTHORIZATION REQUIRED) utilizado por la OACI.
Explicación de términos
l-(xl)
TECHNICAL STANDARD ORDER (TSO) ORDEN TÉCNICA ESTANDAR Orden sobre normas o estándares técnicos de la FAA de los Estados Unidos. TERMINAL ARRIVAL ALTITUDE (TAA) ALTITUD DE LLEGADA A TERMINAL La altitud más baja que se pueda utilizar que proporcione un margen mínimo de franqueamiento de 1000 ft por encima de todos los objetos ubicados dentro de un arco de círculo de 25 NM de radio con centro en el IAF o, cuando no hay IAF, en el IF delimitado por líneas rectas que unen los extremos del arco al IF. Las TAA combinadas relacionadas con un procedimiento de aproximación representarán un área de 360° alrededor del IF. TIME NAVIGATION TNAV NAVEGACIÓN HORARIA Función del equipo RNAV (P.ej. FMS) que proporciona la capacidad de llegada/salida a un punto de recorrido, a una hora especificada. TOTAL SYSTEM ERROR (TSE) ERROR TOTAL DEL SISTEMA Equivale a la suma de los cuadrados del error del sistema de navegación y del error técnico de vuelo. (TSE = NSE2 + FTE2). VERTICAL ERROR BUDGET ERROR VERTICAL PRESUPUESTADO Ecuación que representa la cantidad total que resulta de los componentes del sistema de navegación vertical. La aplicación de esta ecuación determina la cantidad mínima, en pies, de franqueamiento vertical que debe existir ente la aeronave en la trayectoria nominal de planeo y los obstáculos en el área de evaluación de obstáculos en el segmento de aproximación final. VERTICAL NAVIGATION (VNAV) NAVEGACIÓN VERTICAL Función del equipo RNAV (P.ej. FMS) por la que se calcula, se presenta en pantalla, y se proporciona guía respecto a un perfil o trayectoria en el plano vertical. Asimismo acompaña al acrónimo LNAV que identifica los mínimos de un procedimiento de aproximación RNAV de no precisión que cuenta con guía lateral y vertical. La guía vertical es proporcionada normalmente por un sistema Baro – VNAV, pero con unos límites de integridad lateral y vertical mayores que los de una aproximación de precisión o LPV. VERTICAL PATH ANGLE (VPA) ÁNGULO DE TRAYECTORIA VERTICAL Angulo de descenso de aproximación final publicado en los procedimientos Baro-VNAV.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I (xli)
VISUAL DESCENT POINT (VDP) PUNTO VISUAL DE DESCENSO Punto definido en el tramo final de un procedimiento de aproximación RNAV directo de no precisión desde el cual un descenso normal desde la altitud mínima de descenso (MDA) hasta el punto de toma de contacto de la pista puede ser iniciado. Si un indicador de trayectoria de planeo se encuentra instalado, v.g. PAPI, el VDP es la intersección de la trayectoria de planeo con la MDA. El VDP aplica únicamente a las aeronaves que utilizan mínimos LNAV, no para aquellas que utilizan mínimos LPV o LNAV/VNAV. VISUAL SEGMENT SURFACE (VSS) SUPERFICIE DEL TRAMO VISUAL Área dispuesta en el segmento de aproximación final con el fin de evaluar y restringir, de ser posible, el emplazamiento de obstáculos que penetren dicha superficie. Comienza 60 m antes del umbral de la pista y a la altura del mismo y finaliza en el punto en que la altura de un plano con una pendiente de 1.12º menos que el ángulo del procedimiento de aproximación promulgado alcanza la altura de franqueamiento de obstáculos. WAYPOINT (WP) PUNTO DE RECORRIDO Un lugar geográfico especificado, utilizado para definir una ruta de navegación de área o la trayectoria de vuelo de una aeronave que emplea navegación de área. Nota: Existen dos tipos de puntos de Recorrido, Fly By y Fly Over; estos puntos deben estar en la Base de Datos de Navegación a bordo. WIDE AREA AUGMENTATION AUMENTACIÓN DE AREA AMPLIA Aumentación que proporciona señales adicionales del satélite por encima de un área geográfica extensa, de forma de mejorar la integridad y/o la disponibilidad y/o la exactitud del GNSS. WIDE AREA AUGMENTATION SYSTEM (WAAS) SISTEMA DE AUMENTACIÓN DE ÁREA AMPLIA Sistema SBAS desarrollado por Estados Unidos. Esta ideado como un complemento para la red GPS con el fin de proporcionar una mayor precisión y seguridad en las señales, permitiendo una precisión en la posición menor de dos metros. WORLD GEODETIC SYSTEM 1984 (WGS – 84) SISTEMA GEODÉSICO MUNDIAL 1984 Sistema de referencia geodésica normalizado basado en un elipsoide geocéntrico referencial para determinar coordenadas geográficas bajo un solo sistema mundial de coordenadas. Un conjunto prefijado de parámetros que describen el tamaño y la forma de la Tierra, las posiciones de una red de puntos con respecto al centro de la masa de la Tierra y las conversiones a partir de datums geodésicos mayores.

Explicación de términos
l-(xlii)

CAPÍTULO 1
DESCRIPCIÓN DE LA NAVEGACIÓN BASADA EN EL RENDIMIENTO
General La navegación basada en el performance (PBN), concepto que especifica que las aeronaves con sistemas RNAV definen los requisitos en términos de exactitud, integridad, disponibilidad, continuidad y funcionalidad requeridas para las operaciones propuestas en el contexto de un determinado concepto de espacio aéreo, cuando están soportadas en una infraestructura de navegación adecuada. En ese contexto, el concepto PBN representa un cambio de sensores basados en navegación basada en performance. Los requisitos de performance se indican en las especificaciones de navegación, que también identifica la elección de los sensores de navegación y equipos que pueden ser utilizados para satisfacer los requisitos de performance. Estas especificaciones de navegación proporcionan orientaciones específicas de aplicación para los Estados y los operadores con el fin de facilitar la armonización mundial. En virtud de la PBN, los requisitos de navegación genéricos se definieron por primera vez sobre la base de las necesidades operacionales. Entonces los operadores evalúan las opciones disponibles en materia de tecnología y servicios de navegación. Una solución elegida sería la más rentable para el operador, en contraposición a una solución que se estableció como parte de las necesidades operacionales. La tecnología puede evolucionar con el tiempo sin necesidad de la operación en sí misma para ser revisada, siempre que el rendimiento requerido es proporcionado por el sistema RNAV. Beneficios La Navegación Basada en la performance ofrece una serie de ventajas sobre los sensores específicos y método de desarrollo de espacio aéreo y criterios de franqueamiento de obstáculos. Por ejemplo, la PBN:
a) Reduce la necesidad de mantener las rutas de sensores específicos y procedimientos, y sus costos asociados. Por ejemplo, mover una sola instalación terrena VOR puede afectar a decenas de procedimientos, como el VOR se puede utilizar en las rutas, aproximaciones VOR, aproximaciones frustradas, etc. Adición de nuevos procedimientos con sensores específicos aumentará este costo, y el rápido crecimiento en los sistemas de navegación disponibles haría rutas y procedimientos con sensores específicos inasequibles;
b) Evita la necesidad para el desarrollo de operaciones con sensores específicos con cada nueva evolución de los sistemas de navegación, lo que sería en función de los
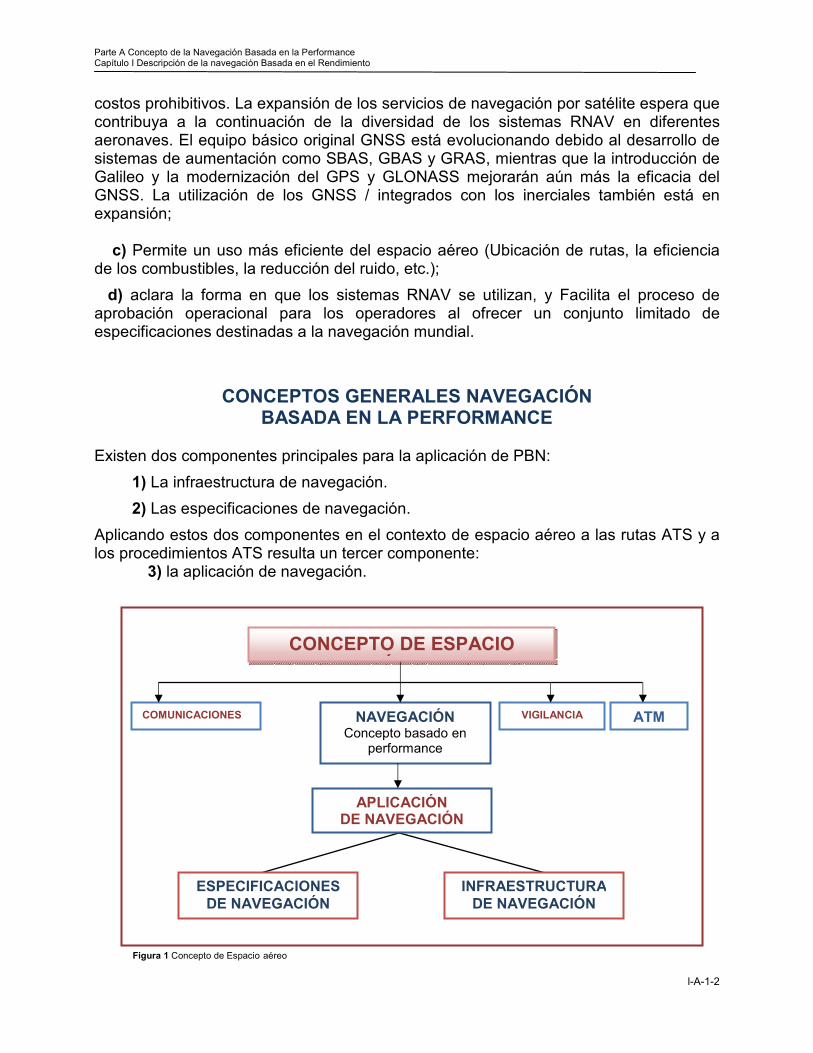
Parte A Concepto de la Navegación Basada en la Performance Capítulo I Descripción de la navegación Basada en el Rendimiento
l-A-1-2
costos prohibitivos. La expansión de los servicios de navegación por satélite espera que contribuya a la continuación de la diversidad de los sistemas RNAV en diferentes aeronaves. El equipo básico original GNSS está evolucionando debido al desarrollo de sistemas de aumentación como SBAS, GBAS y GRAS, mientras que la introducción de Galileo y la modernización del GPS y GLONASS mejorarán aún más la eficacia del GNSS. La utilización de los GNSS / integrados con los inerciales también está en expansión; c) Permite un uso más eficiente del espacio aéreo (Ubicación de rutas, la eficiencia de los combustibles, la reducción del ruido, etc.);
d) aclara la forma en que los sistemas RNAV se utilizan, y Facilita el proceso de aprobación operacional para los operadores al ofrecer un conjunto limitado de especificaciones destinadas a la navegación mundial.
CONCEPTOS GENERALES NAVEGACIÓN BASADA EN LA PERFORMANCE
Existen dos componentes principales para la aplicación de PBN:
1) La infraestructura de navegación.
2) Las especificaciones de navegación.
Aplicando estos dos componentes en el contexto de espacio aéreo a las rutas ATS y a los procedimientos ATS resulta un tercer componente: 3) la aplicación de navegación.
CONCEPTO DE ESPACIO AÉREO
NAVEGACIÓN Concepto basado en
performance
COMUNICACIONES ATM VIGILANCIA
APLICACIÓN DE NAVEGACIÓN
ESPECIFICACIONES DE NAVEGACIÓN
INFRAESTRUCTURA DE NAVEGACIÓN
Figura 1 Concepto de Espacio aéreo
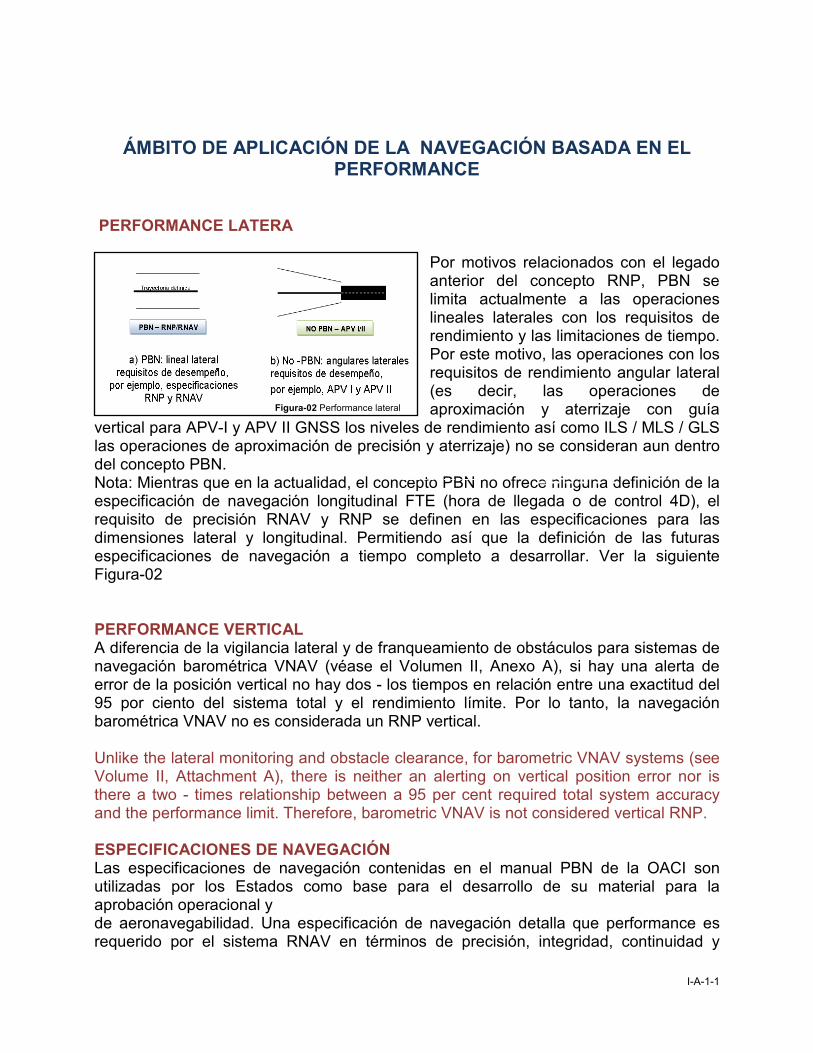
I-A-1-1
ÁMBITO DE APLICACIÓN DE LA NAVEGACIÓN BASADA EN EL PERFORMANCE
PERFORMANCE LATERA
Por motivos relacionados con el legado anterior del concepto RNP, PBN se limita actualmente a las operaciones lineales laterales con los requisitos de rendimiento y las limitaciones de tiempo. Por este motivo, las operaciones con los requisitos de rendimiento angular lateral (es decir, las operaciones de aproximación y aterrizaje con guía
vertical para APV-I y APV II GNSS los niveles de rendimiento así como ILS / MLS / GLS las operaciones de aproximación de precisión y aterrizaje) no se consideran aun dentro del concepto PBN. Nota: Mientras que en la actualidad, el concepto PBN no ofrece ninguna definición de la especificación de navegación longitudinal FTE (hora de llegada o de control 4D), el requisito de precisión RNAV y RNP se definen en las especificaciones para las dimensiones lateral y longitudinal. Permitiendo así que la definición de las futuras especificaciones de navegación a tiempo completo a desarrollar. Ver la siguiente Figura-02 PERFORMANCE VERTICAL A diferencia de la vigilancia lateral y de franqueamiento de obstáculos para sistemas de navegación barométrica VNAV (véase el Volumen II, Anexo A), si hay una alerta de error de la posición vertical no hay dos - los tiempos en relación entre una exactitud del 95 por ciento del sistema total y el rendimiento límite. Por lo tanto, la navegación barométrica VNAV no es considerada un RNP vertical. Unlike the lateral monitoring and obstacle clearance, for barometric VNAV systems (see Volume II, Attachment A), there is neither an alerting on vertical position error nor is there a two - times relationship between a 95 per cent required total system accuracy and the performance limit. Therefore, barometric VNAV is not considered vertical RNP. ESPECIFICACIONES DE NAVEGACIÓN Las especificaciones de navegación contenidas en el manual PBN de la OACI son utilizadas por los Estados como base para el desarrollo de su material para la aprobación operacional y de aeronavegabilidad. Una especificación de navegación detalla que performance es requerido por el sistema RNAV en términos de precisión, integridad, continuidad y
Figura-02 Performance lateral
Parte A Concepto de la Navegación Basada en la Performance Capítulo I Descripción de la navegación Basada en el Rendimiento
l-A-1-2
disponibilidad; cuáles de las funciones de navegación son requeridas por el sistema RNAV para satisfacer la performance requerida; cuáles de los sensores de navegación deben ser integrados al sistema RNAV para conseguir la performance requerida; cuáles requisitos deberá cumplir la tripulación de vuelo para alcanzar el performance requerido por la aeronave y el sistema RNAV.
Una especificación de navegación podrá ser o una especificación RNP, o una especificación RNAV. Una especificación RNP exige cumplir el requisito de vigilancia de performance y alerta a bordo, mientras que una especificación RNAV no.
La vigilancia del performance a bordo y la alerta son los principales elementos que determinan si el sistema de navegación cumple con el nivel de seguridad necesario para una aplicación RNP.
La vigilancia del performance a bordo y la alerta permite a la tripulación de vuelo detectar que el sistema de navegación no garantiza, o no puede garantizar una integridad de 10-5, performance de navegación requerida para la operación.
Las especificaciones RNAV y RNP requieren del cumplimiento de algunas funciones de navegación. Básicamente estas funciones son:
a) Indicación permanente de la posición de la aeronave con respecto a la derrota a ser mostrada al piloto que vuela, en una presentación de navegación, en su campo primario de visión.
b) Presentación de distancia y rumbo al punto de recorrido activo.
c) Presentación de velocidad de tierra (GS) o tiempo al punto de recorrido activo.
d) Almacenamiento de datos de navegación.
e) Indicación apropiada de falla del sistema RNAV, incluidos los sensores.
DENOMINACIÓN DE LAS ESPECIFICACIONES RNAV/RNP
Operaciones oceánicas, remotas, en ruta y área terminal Para operaciones oceánicas, remotas, en ruta y área terminal, se designarán como RNP X ó RNAV X, donde “X” se refiere a la precisión de navegación lateral, en NM, que se espera será alcanzada por lo menos el 95% del tiempo de vuelo por las aeronaves que operan dentro del espacio aéreo, ruta o procedimiento. Si dos especificaciones de navegación comparten el mismo valor, ellas podrían ser distinguidas por el uso de un prefijo, como por ejemplo: RNP 1 Avanzado y RNP 1 Básico.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I- A-1-3
Aproximación Las especificaciones de navegación para aproximación cubren todos los segmentos de la aproximación por instrumentos. Las especificaciones RNP se designarán utilizando el prefijo RNP seguido de un sufijo abreviado APCH ó AR APCH.
En estos casos en que la precisión de navegación es usada como parte de la denominación de la especificación de navegación debería notarse que la precisión es tan solo uno de los muchos requisitos de performance incluidos en las especificaciones de navegación.
La planificación de los vuelos con denominaciones RNP y RNAV La notificación manual o automática de la calificación de una aeronave para operar a lo largo de una ruta ATS, en un procedimiento o en un espacio aéreo se proporciona al ATC a través de Plan de Vuelo. Los Procedimientos de plan de vuelo se tratan en los procedimientos para Servicios de Navegación Aérea - Gestión del Tránsito Aéreo (PANS-ATM) (Doc. 4444). Considerando que se han definido requisitos de performance específicos para cada una de las especificaciones de navegación, una aeronave aprobada para una especificación RNP no está automáticamente aprobada para todas las especificaciones RNAV. De manera similar, una aeronave aprobada para una especificación RNP ó RNAV que tenga un requisito de precisión rigurosa (ejemplo RNP 0.3) no está automáticamente aprobada para una especificación de navegación que tenga un requisito de precisión menos riguroso (ejemplo RNP-4). Podría parecer lógico, por ejemplo, que una aeronave aprobada para RNP 1 Básico esté automáticamente para RNP-4; sin embargo, no es el caso. Una aeronave aprobada para un requisito de precisión más riguroso podría no necesariamente satisfacer algunos de los requisitos de funcionalidad de la especificación de navegación que tenga una precisión menos rigurosa.
ACOMODANDO LAS DENOMINACIONES RNP INCOHERENTES
EJEMPLO:
La denominación RNAV-1 se refiere a una especificación RNAV que incluye un requisito de precisión de navegación de 1 NM entre muchos otros. Aunque la denominación RNAV-1 podría insinuar que 1 NM (lateral) de precisión en la navegación es el único criterio de performance requerido, este no es el caso. Como todas las especificaciones de navegación, la denominación RNAV-1 incluye todos los requisitos del sistema de navegación de la aeronave y de la tripulación de vuelo contenidos en el manual para la navegación basada en performance de la OACI.
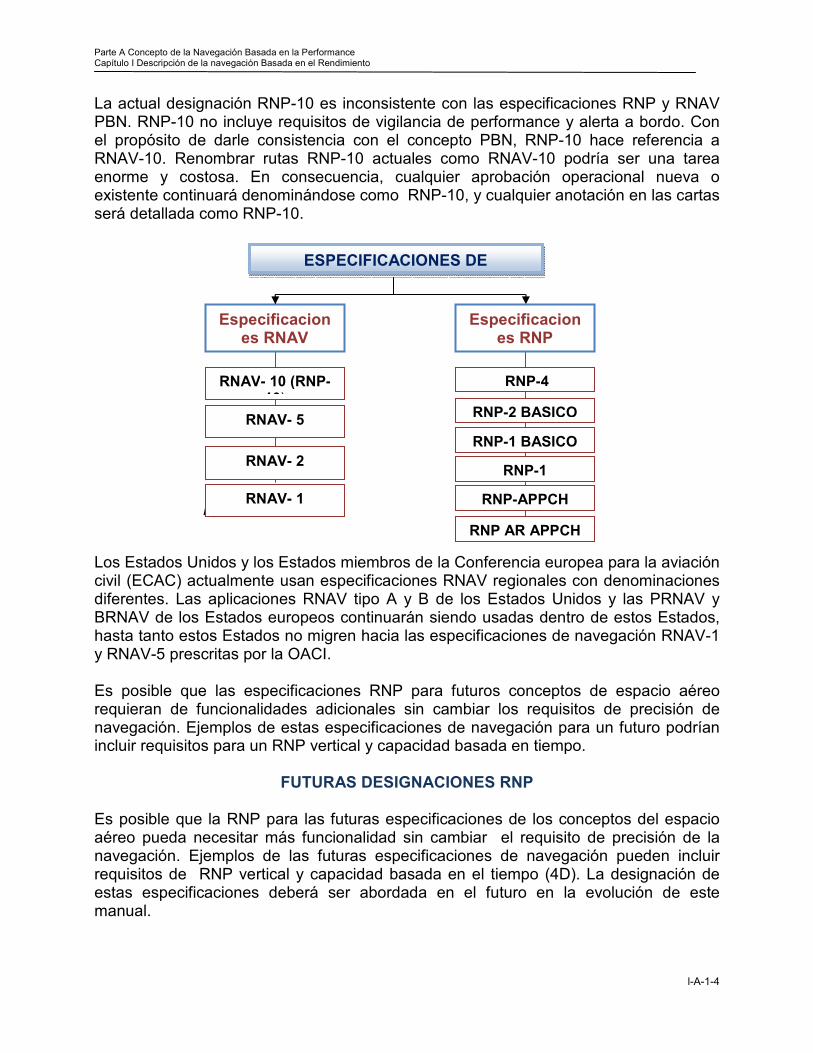
Parte A Concepto de la Navegación Basada en la Performance Capítulo I Descripción de la navegación Basada en el Rendimiento
l-A-1-4
La actual designación RNP-10 es inconsistente con las especificaciones RNP y RNAV PBN. RNP-10 no incluye requisitos de vigilancia de performance y alerta a bordo. Con el propósito de darle consistencia con el concepto PBN, RNP-10 hace referencia a RNAV-10. Renombrar rutas RNP-10 actuales como RNAV-10 podría ser una tarea enorme y costosa. En consecuencia, cualquier aprobación operacional nueva o existente continuará denominándose como RNP-10, y cualquier anotación en las cartas será detallada como RNP-10. Los Estados Unidos y los Estados miembros de la Conferencia europea para la aviación civil (ECAC) actualmente usan especificaciones RNAV regionales con denominaciones diferentes. Las aplicaciones RNAV tipo A y B de los Estados Unidos y las PRNAV y BRNAV de los Estados europeos continuarán siendo usadas dentro de estos Estados, hasta tanto estos Estados no migren hacia las especificaciones de navegación RNAV-1 y RNAV-5 prescritas por la OACI.
Es posible que las especificaciones RNP para futuros conceptos de espacio aéreo requieran de funcionalidades adicionales sin cambiar los requisitos de precisión de navegación. Ejemplos de estas especificaciones de navegación para un futuro podrían incluir requisitos para un RNP vertical y capacidad basada en tiempo.
FUTURAS DESIGNACIONES RNP Es posible que la RNP para las futuras especificaciones de los conceptos del espacio aéreo pueda necesitar más funcionalidad sin cambiar el requisito de precisión de la navegación. Ejemplos de las futuras especificaciones de navegación pueden incluir requisitos de RNP vertical y capacidad basada en el tiempo (4D). La designación de estas especificaciones deberá ser abordada en el futuro en la evolución de este manual.
Figura-03 Denominaciones RNP incoherentes
ESPECIFICACIONES DE
Especificaciones RNAV
Especificaciones RNP
RNAV- 10 (RNP-10)
RNP-4
RNAV- 5
RNAV- 2
RNAV- 1
RNP-1
RNP-2 BASICO
RNP-1 BASICO
RNP-APPCH
RNP AR APPCH
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I- A-1-5
INFRAESTRUCTURA DE AYUDAS A LA NAVEGACIÓN La infraestructura de ayudas para la navegación se refiere a las ayudas para la navegación basadas en tierra o en el espacio. Las ayudas basadas en tierra incluyen DME y VOR. Las ayudas basadas en el espacio incluyen los elementos GNSS tal y como se definen en el Anexo 10 Volumen I de la OACI.
APLICACIONES DE NAVEGACIÓN Una aplicación de navegación es la aplicación de una especificación de navegación asociada a una infraestructura de ayudas para la navegación para rutas ATS, procedimientos de aproximación por instrumentos y/o volumen de espacio aéreo definido según el concepto de espacio aéreo. Una aplicación RNAV esta soportada en una especificación RNAV; una aplicación RNP está soportada por una especificación RNP.
LOS DESARROLLOS FUTUROS Desde una perspectiva de la navegación basada en performance, es probable que las aplicaciones de la navegación progresen de 2D a 3D/4D, aunque las escalas de tiempo y los requisitos operacionales son actualmente difíciles determinar. Por consiguiente, la supervisión de la vigilancia de la performance y alerta a bordo será desarrollada en el plano vertical (RNP vertical) y el trabajo continuado está apuntando a armonizar los requisitos de la actuación longitudinales y lineales. También es posible que los requisitos de performance angular asociados con la aproximación y el aterrizaje puedan ser incluidos en el alcance del PBN en el futuro. Similarmente, las especificaciones para apoyar las técnicas de navegación de helicópteros y los requisitos funcionales de esperas también pueden ser incluidas. Cuando más confianza se pone en el GNSS, el desarrollo de conceptos de espacio aéreo necesitará cada vez más asegurar la integración coherente de navegación, comunicación y vigilancia ATS.
EVOLUCIÓN FUTURA Desde el punto de vista navegación basado en la performance, es probable que las aplicaciones de la navegación de los progresos de 2D a 3D/4D, los plazos y las necesidades operacionales actualmente son difícil de determinar. En consecuencia, a la ejecución de la supervisión a bordo y de alerta aún no se han desarrollado en el plano vertical (vertical RNP) y los trabajos en curso están destinados a armonizar los requisitos de rendimiento longitudinal y lineal. También es posible que los requisitos de rendimiento angular asociados con la aproximación y el aterrizaje se puedan incluir en el ámbito de aplicación de la PBN en el futuro. Del mismo modo, especificaciones de

Parte A Concepto de la Navegación Basada en la Performance Capítulo I Descripción de la navegación Basada en el Rendimiento
l-A-1-6
helicópteros para apoyar las solicitudes específicas de navegación y la celebración de los requisitos funcionales también pueden ser incluidos.
I-A-2-1
LOS OBJETIVOS
Seguridad Capacidad Eficacia Acceso Medio Ambiente
CONCEPTOS DE ESPACIO AEREO
CAPÍTULO 2
CONCEPTOS DE ESPACIO AÉREO EL CONCEPTO DE ESPACIO AÉREO Un concepto de espacio aéreo puede ser visto como una visión general o un plan maestro para un espacio aéreo en particular. Basado en principios particulares, en adelante un concepto de espacio aéreo se engrana hacia los objetivos específicos. Los conceptos de espacio aéreo necesitan incluir un cierto nivel de detalle si los cambios son introducidos dentro de un espacio aéreo. Por ejemplo, los detalles podrían explicar el espacio aéreo la organización y la gestión, las reglas a jugar por los diferentes administradores y usuarios de espacio aéreo. Los conceptos de espacio aéreo también pueden describir los diferentes roles y responsabilidades, los mecanismos usados y las relaciones entre las personas y las máquinas. Los objetivos estratégicos manejan la visión general del concepto de espacio aéreo (Figura 4). Estos objetivos son normalmente identificados por los usuarios de espacio aéreo, la gestión del tránsito aéreo (ATM), aeropuertos así como el medioambiente y las políticas gubernamentales. Esta es la función del concepto de espacio aéreo y el concepto de operaciones para responder a estos requisitos. Los objetivos estratégicos que la mayoría normalmente maneja dentro de los conceptos de espacio aéreo son la seguridad, capacidad, la eficacia, el acceso y el medio ambiente.
Como los Ejemplos 1 y 2 debajo sugeridos, los objetivos estratégicos pueden producir cambios introducidos al concepto de espacio aéreo.
Figura 4
Figura 4
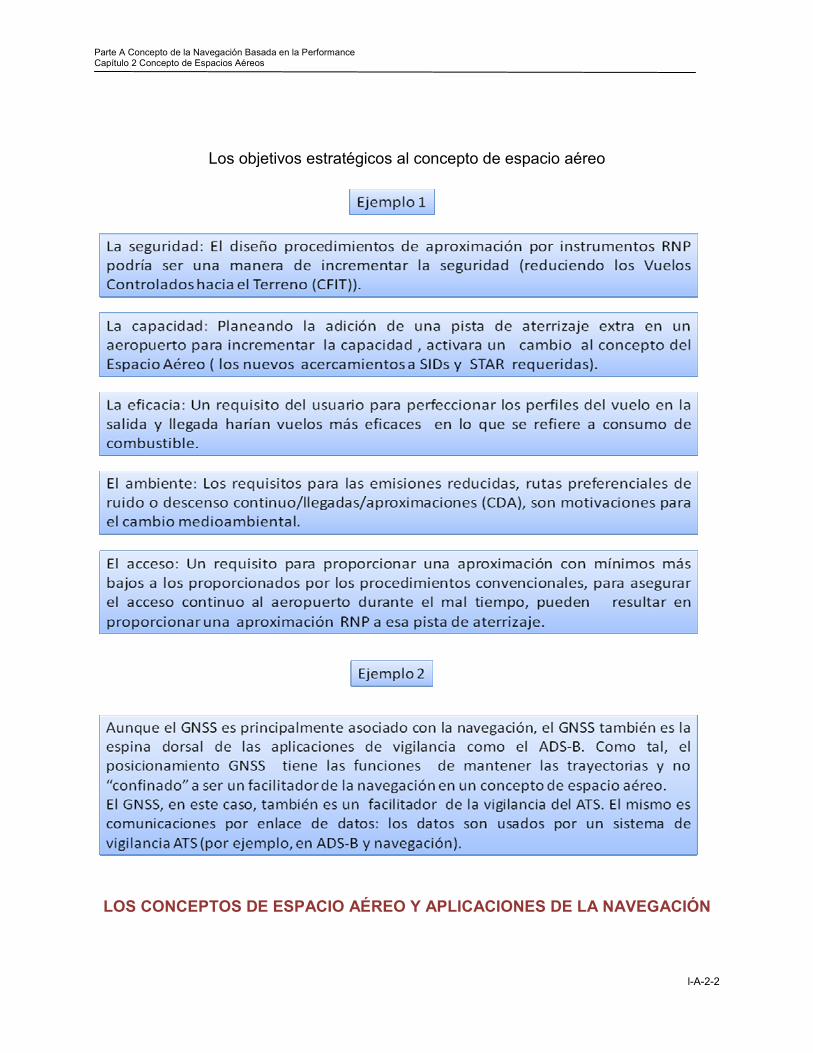
Parte A Concepto de la Navegación Basada en la Performance Capítulo 2 Concepto de Espacios Aéreos
l-A-2-2
Los objetivos estratégicos al concepto de espacio aéreo
LOS CONCEPTOS DE ESPACIO AÉREO Y APLICACIONES DE LA NAVEGACIÓN
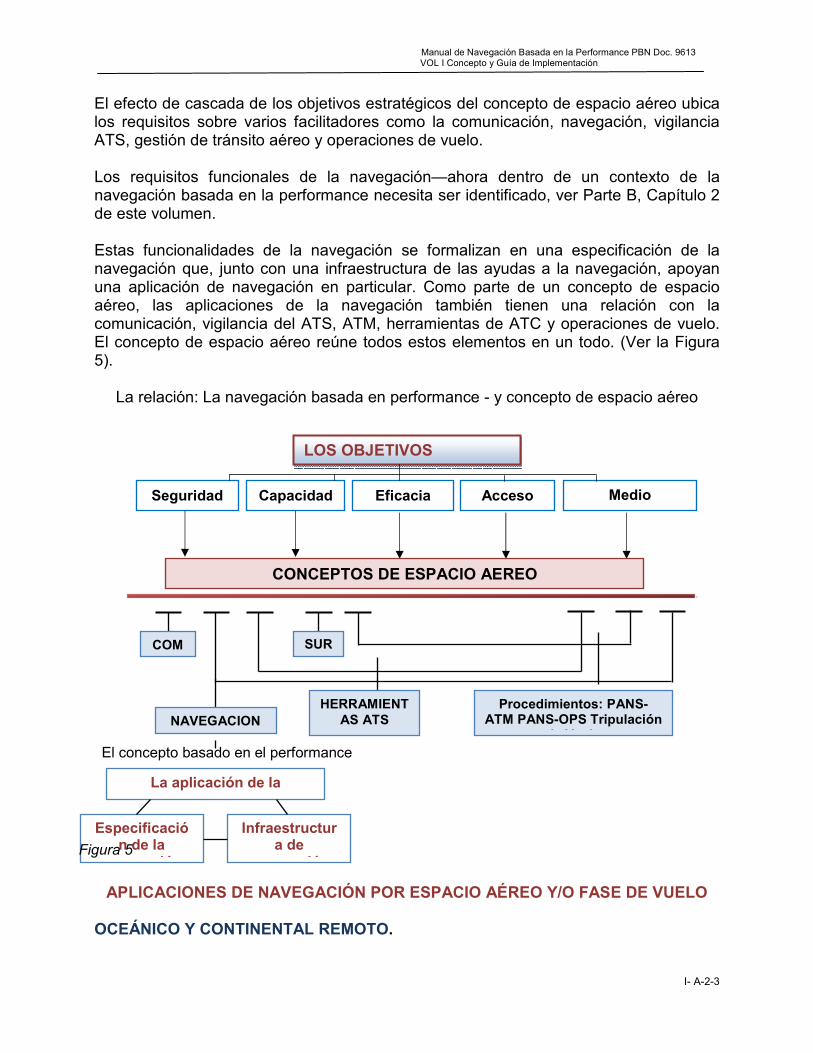
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I- A-2-3
El efecto de cascada de los objetivos estratégicos del concepto de espacio aéreo ubica los requisitos sobre varios facilitadores como la comunicación, navegación, vigilancia ATS, gestión de tránsito aéreo y operaciones de vuelo. Los requisitos funcionales de la navegación—ahora dentro de un contexto de la navegación basada en la performance necesita ser identificado, ver Parte B, Capítulo 2 de este volumen. Estas funcionalidades de la navegación se formalizan en una especificación de la navegación que, junto con una infraestructura de las ayudas a la navegación, apoyan una aplicación de navegación en particular. Como parte de un concepto de espacio aéreo, las aplicaciones de la navegación también tienen una relación con la comunicación, vigilancia del ATS, ATM, herramientas de ATC y operaciones de vuelo. El concepto de espacio aéreo reúne todos estos elementos en un todo. (Ver la Figura 5). La relación: La navegación basada en performance - y concepto de espacio aéreo
APLICACIONES DE NAVEGACIÓN POR ESPACIO AÉREO Y/O FASE DE VUELO OCEÁNICO Y CONTINENTAL REMOTO.
LOS OBJETIVOS
Seguridad Capacidad Eficacia Acceso Medio Ambiente
CONCEPTOS DE ESPACIO AEREO
La aplicación de la navegación
Especificación de la
navegación
Infraestructura de
navegación
SUR COM
NAVEGACION
El concepto basado en el performance
HERRAMIENTAS ATS
Procedimientos: PANS-ATM PANS-OPS Tripulación
de Vuelo
Figura 5
Parte A Concepto de la Navegación Basada en la Performance Capítulo 2 Concepto de Espacios Aéreos
l-A-2-4
Los espacios aéreos oceánicos y continentales remotos son actualmente servidos por dos aplicaciones de navegación, RNAV-10 y RNP-4. Ambas aplicaciones de navegación se apoyan fundamentalmente en GNSS. En el caso de la aplicación RNAV-10, ninguna forma de vigilancia ATS es requerida. En el caso de la aplicación RNP-4, un contrato ADS (ADS – C) es utilizado. EN RUTA CONTINENTAL El concepto espacio aéreo en ruta Continental, se apoyan actualmente en las aplicaciones RNAV. RNAV-5 se usa en el Oriente Medio (MID) y en Regiones de Europa (EUR) pero a partir de la fecha, es designado como B-RNAV (RNAV Básica en Europa y RNP 5 en el Oriente Medio. En los Estados Unidos, una aplicación RNAV-2 soporta el concepto de espacio aéreo en ruta continental, En la actualidad, la aplicación RNAV soporta el concepto espacio aéreo continental que incluyen la vigilancia por radar y comunicación directa piloto y controlador (voz). ÁREA TERMINAL (SID Y STAR). Conceptos de espacio aéreo terminales existentes que incluyen llegada y salida son apoyados por las aplicaciones de RNAV. Éstos se usan actualmente en Europa (EUR) y los Estados Unidos. En el espacio aéreo terminal europeo RNAV la aplicación es conocida como P-RNAV (Precisión RNAV), aunque la especificación RNAV-1 comparte una exactitud de navegación común con P-RNAV, esta especificación de navegación regional no satisface todos los requisitos de la especificación RNAV-1. En los Estados Unidos el espacio aéreo terminal la especificación RNAV-1 es conocida como Basic RNAV (B-RNAV) esta se ha alineado con el concepto de PBN y ahora se llama RNAV-1. Básico-RNP 1 se ha desarrollado principalmente para la aplicación en el entorno no radar, espacio aéreo terminal de baja densidad. En el futuro, se esperan desarrollar más aplicaciones de RNP para ambos en-ruta y espacio aéreo terminal. APROXIMACIÓN. El concepto aproximación abarcan todos los segmentos de la aproximación por instrumentos, es decir, inicial, intermedio, final y aproximación frustrada. Cada vez más se utilizan especificaciones RNP que requieren de una precisión de la navegación de 0,3 NM a 0,1 NM o inferior. Normalmente, tres tipos de aplicaciones de RNP son característicos de esta fase de vuelo: conocidas como RNP APPCH ó RNP AR APPCH.
I-A-3-1
CAPÍTULO 3
USOS DE LAS PARTES INTERESADAS DE LA NAVEGACIÓN BASADA EN LA PERFORMANCE
Diversas partes interesadas están involucradas en el desarrollo del concepto de espacio aéreo y la consiguiente aplicación de navegación. Estos actores son los planificadores del espacio aéreo, diseñadores de los procedimientos, fabricantes de aeronaves, pilotos y controladores de tránsito, cada actor tiene un papel diferente y un conjunto de responsabilidades. Las partes interesadas en el uso de los conceptos de la navegación basada en la performance en las diferentes etapas:
� En el plano estratégico, los planificadores del espacio aéreo y diseñadores de procedimientos trasladan "el concepto de la PBN" a la realidad de la separación en ruta, las mínimas de separación de aeronaves y el diseño de procedimientos.
� También en el plano estratégico, pero después de que los planificadores del espacio aéreo y diseñadores de procedimientos hayan terminado su trabajo, las autoridades de reglamentación y aeronavegabilidad garanticen que las aeronaves y tripulaciones cumplan con las necesidades operacionales destinadas a la implementación.
� En un nivel táctico, los controladores y los pilotos usen el concepto de la PBN en las operaciones en tiempo real. Se basan en la "Preparatoria" del trabajo realizado a nivel estratégico por otras partes interesadas.
Todas las partes interesadas utilicen todos los elementos del concepto PBN, sin embargo, cada actor tiende a centrarse en una parte del concepto de la PBN. Esto se representa en la Figura 6 “Elementos Específicos de la PBN”
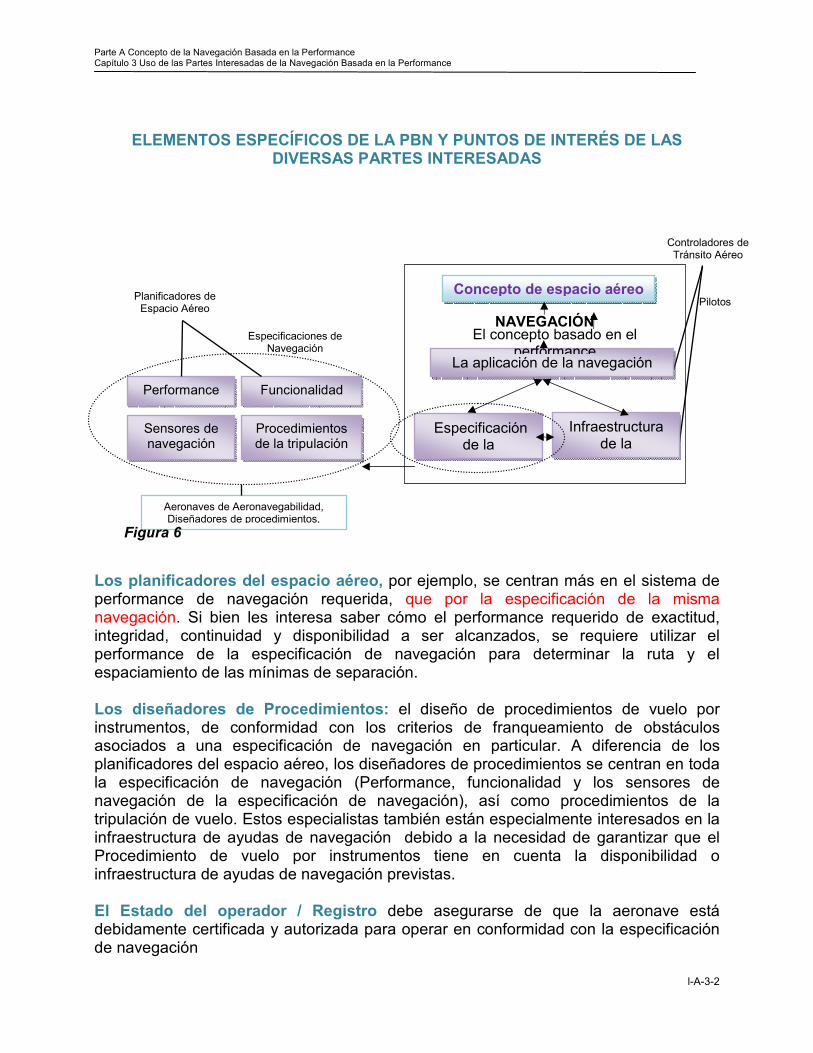
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-2
ELEMENTOS ESPECÍFICOS DE LA PBN Y PUNTOS DE INTERÉS DE LAS DIVERSAS PARTES INTERESADAS
Los planificadores del espacio aéreo, por ejemplo, se centran más en el sistema de performance de navegación requerida, que por la especificación de la misma navegación. Si bien les interesa saber cómo el performance requerido de exactitud, integridad, continuidad y disponibilidad a ser alcanzados, se requiere utilizar el performance de la especificación de navegación para determinar la ruta y el espaciamiento de las mínimas de separación. Los diseñadores de Procedimientos: el diseño de procedimientos de vuelo por instrumentos, de conformidad con los criterios de franqueamiento de obstáculos asociados a una especificación de navegación en particular. A diferencia de los planificadores del espacio aéreo, los diseñadores de procedimientos se centran en toda la especificación de navegación (Performance, funcionalidad y los sensores de navegación de la especificación de navegación), así como procedimientos de la tripulación de vuelo. Estos especialistas también están especialmente interesados en la infraestructura de ayudas de navegación debido a la necesidad de garantizar que el Procedimiento de vuelo por instrumentos tiene en cuenta la disponibilidad o infraestructura de ayudas de navegación previstas. El Estado del operador / Registro debe asegurarse de que la aeronave está debidamente certificada y autorizada para operar en conformidad con la especificación de navegación
Performance Funcionalidad
Sensores de navegación
Procedimientos de la tripulación
Infraestructura de la
La aplicación de la navegación
Especificación de la
Concepto de espacio aéreo
NAVEGACIÓN El concepto basado en el
performance
Controladores de Tránsito Aéreo
Planificadores de Espacio Aéreo
Especificaciones de Navegación
Aeronaves de Aeronavegabilidad, Diseñadores de procedimientos,
Pilotos
Figura 6
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-3
prescrita para las operaciones en determinado espacio aéreo, a lo largo de una ruta ATS o procedimiento por instrumentos. En consecuencia, el Estado del operador / registro debe ser consciente de la aplicación de navegación ya que este proporciona un contexto a la especificación de navegación. La especificación de navegación por lo que puede considerarse un punto de anclaje para las tres partes interesadas de la PBN. Esto no significa que los interesados consideren la especificación de navegación de forma aislada, sino que es su principal aproximación. La situación es ligeramente diferente para los pilotos y controladores. Como usuarios finales del concepto de la PBN, los controladores y los pilotos están más implicados en la aplicación de navegación que incluye la especificación de navegación y en la infraestructura de radio ayudas de navegación. Por ejemplo, particularmente en un medio ambiente donde hay una mezcla de diferentes aviones equipados, el controlador puede necesitar saber que sensores de navegación están utilizando los aviones (es decir, la especificación RNAV-1 puede tener el GNSS, DME/DME/IRU y/o DME/DME), sobre una ruta ATS, procedimiento o espacio aéreo, para comprender el sentido que tiene un corte o suspensión en las ayudas para la navegación y que puede significar en las operaciones. Los pilotos Operan a lo largo de una ruta diseñada y emplazada por el diseñador de procedimientos y el planificador del espacios aéreos, mientras que el controlador se asegura de que se mantiene la separación entre las aeronaves que operan en estas rutas.
SEGURIDAD EN LA APLICACIÓN PBN Todos los usuarios del concepto PBN se refieren a la seguridad. Los planificadores del espacio aéreo y los diseñadores de procedimientos, así como los fabricantes de aeronaves y proveedores de servicios de navegación aérea (ANSP), tienen la necesidad de asegurar que la parte del concepto de espacio aéreo cumpla con los requisitos de seguridad pertinentes. Los estados del operador especificarán los requisitos para el equipo de a bordo y, a continuación, es necesario tener la certeza de que estos requisitos están siendo sufragados por los fabricantes. Otras autoridades especifiquen los requisitos a nivel de seguridad en el concepto de espacio aéreo. Estos requisitos se utilizan como base para el espacio aéreo y diseño de procedimientos, una vez más, las autoridades deben tener la certeza de que sus requisitos se cumplan. Que demuestre que los requisitos de seguridad se estén cumpliendo y se logre de diferentes maneras por las diferentes partes interesadas. Los medios utilizados para demostrar la seguridad de un concepto de espacio aéreo no es la misma usada para demostrar que los requisitos de seguridad a nivel de las aeronaves se están cumpliendo. Cuando todos los requisitos de seguridad se han cumplido, los
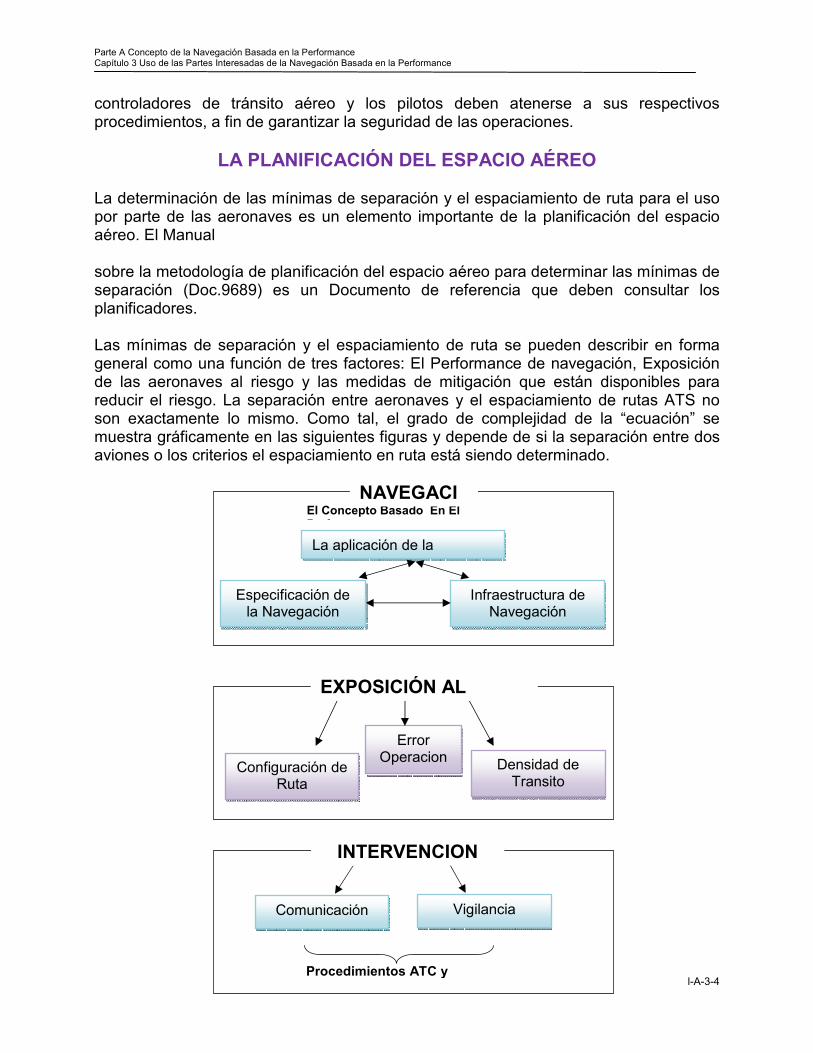
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-4
controladores de tránsito aéreo y los pilotos deben atenerse a sus respectivos procedimientos, a fin de garantizar la seguridad de las operaciones.
LA PLANIFICACIÓN DEL ESPACIO AÉREO La determinación de las mínimas de separación y el espaciamiento de ruta para el uso por parte de las aeronaves es un elemento importante de la planificación del espacio aéreo. El Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de separación (Doc.9689) es un Documento de referencia que deben consultar los planificadores. Las mínimas de separación y el espaciamiento de ruta se pueden describir en forma general como una función de tres factores: El Performance de navegación, Exposición de las aeronaves al riesgo y las medidas de mitigación que están disponibles para reducir el riesgo. La separación entre aeronaves y el espaciamiento de rutas ATS no son exactamente lo mismo. Como tal, el grado de complejidad de la “ecuación” se muestra gráficamente en las siguientes figuras y depende de si la separación entre dos aviones o los criterios el espaciamiento en ruta está siendo determinado.
La aplicación de la
Especificación de la Navegación
Infraestructura de Navegación
El Concepto Basado En El Performance
NAVEGACI
Configuración de Ruta
Error Operacion
al Densidad de Transito
EXPOSICIÓN AL
Comunicación Vigilancia
Procedimientos ATC y Herramientas
INTERVENCION
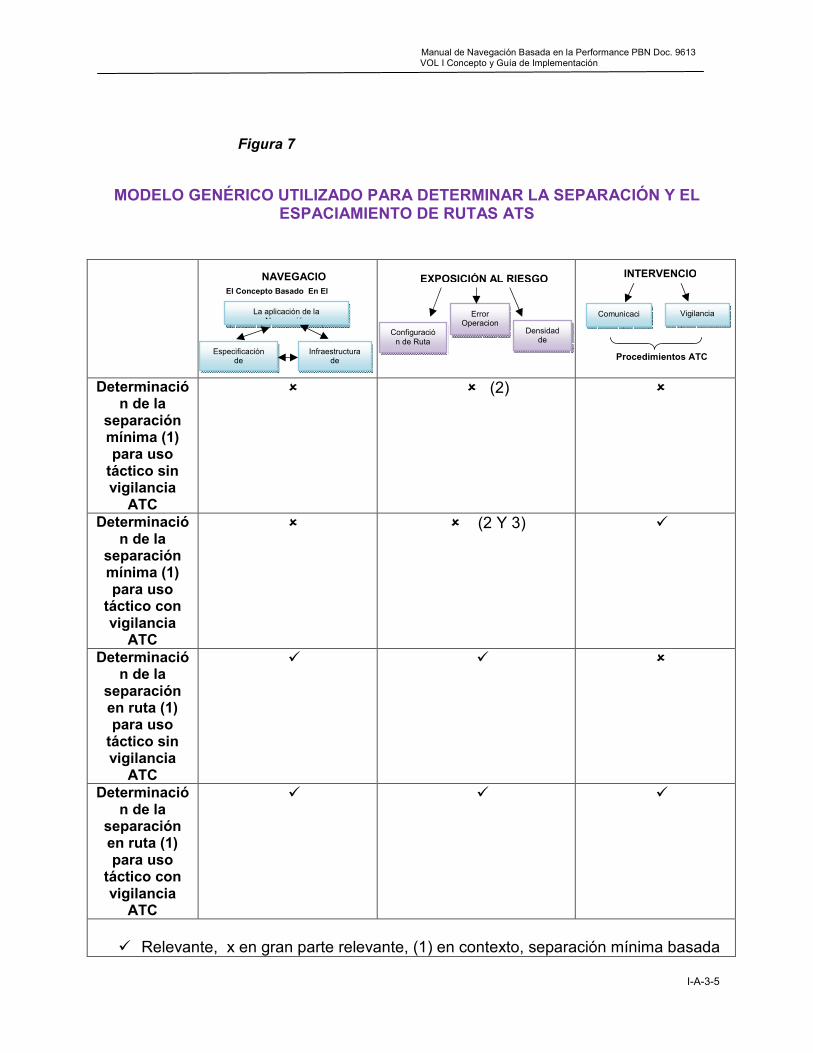
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-5
MODELO GENÉRICO UTILIZADO PARA DETERMINAR LA SEPARACIÓN Y EL
ESPACIAMIENTO DE RUTAS ATS
Determinación de la
separación mínima (1) para uso táctico sin vigilancia
ATC
� � (2) �
Determinación de la
separación mínima (1) para uso táctico con vigilancia
ATC
� � (2 Y 3) �
Determinación de la
separación en ruta (1) para uso táctico sin vigilancia
ATC
� � �
Determinación de la
separación en ruta (1) para uso táctico con vigilancia
ATC
� � �
� Relevante, x en gran parte relevante, (1) en contexto, separación mínima basada
Figura 7
La aplicación de la Navegación
Especificación de
Infraestructura de
El Concepto Basado En El Performance
NAVEGACIO
Configuración de Ruta
Error Operacion
al Densidad de
Transito
EXPOSICIÓN AL RIESGO
Comunicación
Vigilancia
Procedimientos ATC
INTERVENCIO
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-6
en radioayudas o sensores de navegación o PBN (2) densidad de transito=solo un par de aviones, (3) separación mínima determinada como una función de performance del sistema de vigilancia ATC
Figura-08 Factores que influyen en la determinación de la separación y el espaciamiento de ruta
La separación entre aeronaves, por ejemplo, suele aplicarse entre dos aviones y como consecuencia, la densidad de tránsito parte del riesgo es generalmente considerado como un único en un par de aeronaves. Para los propósitos de espaciamiento de ruta, este no es el caso: la densidad de tránsito está determinada por el volumen de tránsito aéreo que operan a lo largo de las rutas ATS espaciadas. Esto significa que si una aeronave en un espacio aéreo es susceptible de la misma performance de navegación, se podría esperar el mínimo de separación entre un solo par de aeronaves a ser inferior a la distancia necesaria para las rutas ATS paralelas. La complejidad de la determinación de espaciamiento en la ruta y la separación mínimas se ve afectada por la disponibilidad de un servicio de vigilancia ATS y el tipo de comunicación utilizado. Si un servicio de vigilancia ATS está disponible, esto significa que el riesgo puede mitigarse mediante la inclusión de requisitos para la intervención de ATC. Ver la figura anterior.
IMPACTO DE LA PBN EN LA PLANIFICACIÓN DEL ESPACIO AÉREO Cuando las mínimas de separación y el espaciamiento de ruta se determina mediante el uso de un sensor convencional basado en aproximación, los datos del performance de navegación utilizado para determinar la separación mínima o el espaciamiento de una ruta dependerá de la exactitud de los datos en bruto de las ayudas a la navegación determinadas, tales como VOR, DME, NDB. En contraste, la PBN requiere de un sistema RNAV que integra los datos de navegación en bruto para proporcionar una solución de navegación y posicionamiento. Para determinar las mínimas de separación y espaciamiento de ruta en un contexto PBN esta salida de performance de navegación integrado es usado. Se ha explicado anteriormente (capitulo uno), que la performance de navegación requerida en el sistema RNAV es parte de la especificación de navegación. Para determinar las mínimas de separación y el espaciamiento de ruta, los planificadores del espacio aéreo aprovechan plenamente esa parte de la especificación de navegación que establece el performance de navegación requerida del sistema RNAV. Los planificadores del espacio aéreo también hacen uso del performance requerido, a saber, la precisión, integridad, disponibilidad y continuidad a fin de determinar el espaciamiento de la ruta y las mínimas de separación.
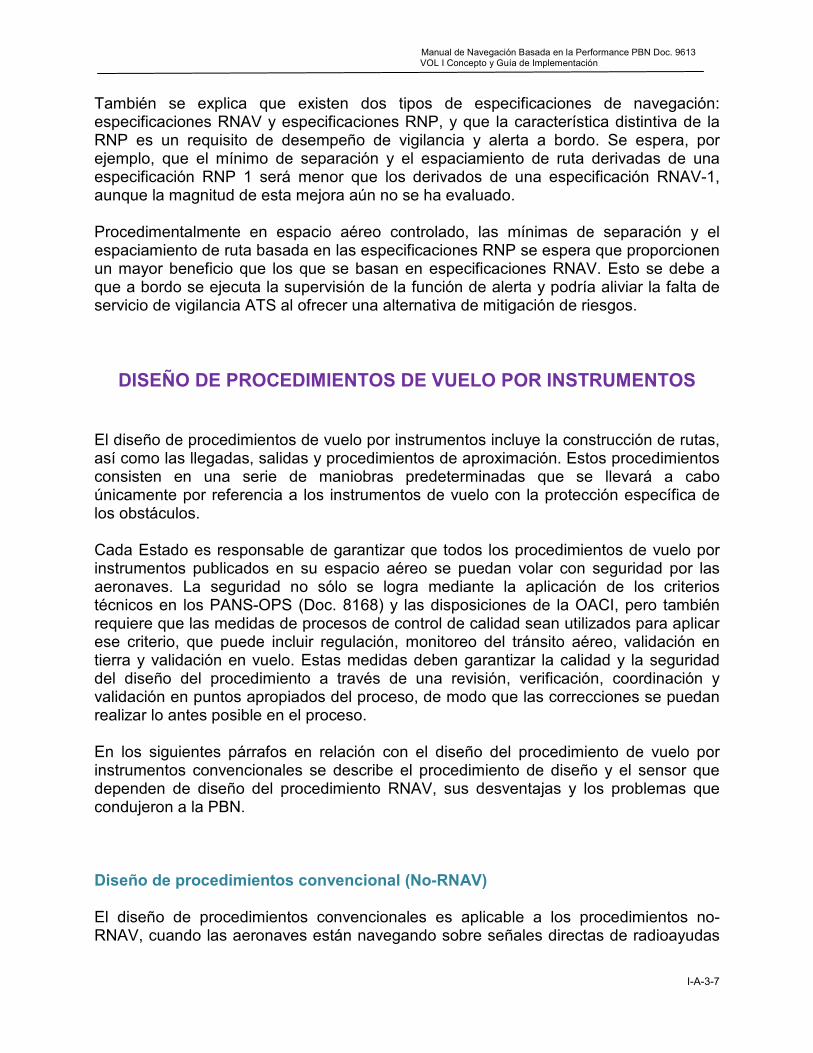
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-7
También se explica que existen dos tipos de especificaciones de navegación: especificaciones RNAV y especificaciones RNP, y que la característica distintiva de la RNP es un requisito de desempeño de vigilancia y alerta a bordo. Se espera, por ejemplo, que el mínimo de separación y el espaciamiento de ruta derivadas de una especificación RNP 1 será menor que los derivados de una especificación RNAV-1, aunque la magnitud de esta mejora aún no se ha evaluado. Procedimentalmente en espacio aéreo controlado, las mínimas de separación y el espaciamiento de ruta basada en las especificaciones RNP se espera que proporcionen un mayor beneficio que los que se basan en especificaciones RNAV. Esto se debe a que a bordo se ejecuta la supervisión de la función de alerta y podría aliviar la falta de servicio de vigilancia ATS al ofrecer una alternativa de mitigación de riesgos.
DISEÑO DE PROCEDIMIENTOS DE VUELO POR INSTRUMENTOS
El diseño de procedimientos de vuelo por instrumentos incluye la construcción de rutas, así como las llegadas, salidas y procedimientos de aproximación. Estos procedimientos consisten en una serie de maniobras predeterminadas que se llevará a cabo únicamente por referencia a los instrumentos de vuelo con la protección específica de los obstáculos. Cada Estado es responsable de garantizar que todos los procedimientos de vuelo por instrumentos publicados en su espacio aéreo se puedan volar con seguridad por las aeronaves. La seguridad no sólo se logra mediante la aplicación de los criterios técnicos en los PANS-OPS (Doc. 8168) y las disposiciones de la OACI, pero también requiere que las medidas de procesos de control de calidad sean utilizados para aplicar ese criterio, que puede incluir regulación, monitoreo del tránsito aéreo, validación en tierra y validación en vuelo. Estas medidas deben garantizar la calidad y la seguridad del diseño del procedimiento a través de una revisión, verificación, coordinación y validación en puntos apropiados del proceso, de modo que las correcciones se puedan realizar lo antes posible en el proceso. En los siguientes párrafos en relación con el diseño del procedimiento de vuelo por instrumentos convencionales se describe el procedimiento de diseño y el sensor que dependen de diseño del procedimiento RNAV, sus desventajas y los problemas que condujeron a la PBN. Diseño de procedimientos convencional (No-RNAV) El diseño de procedimientos convencionales es aplicable a los procedimientos no-RNAV, cuando las aeronaves están navegando sobre señales directas de radioayudas
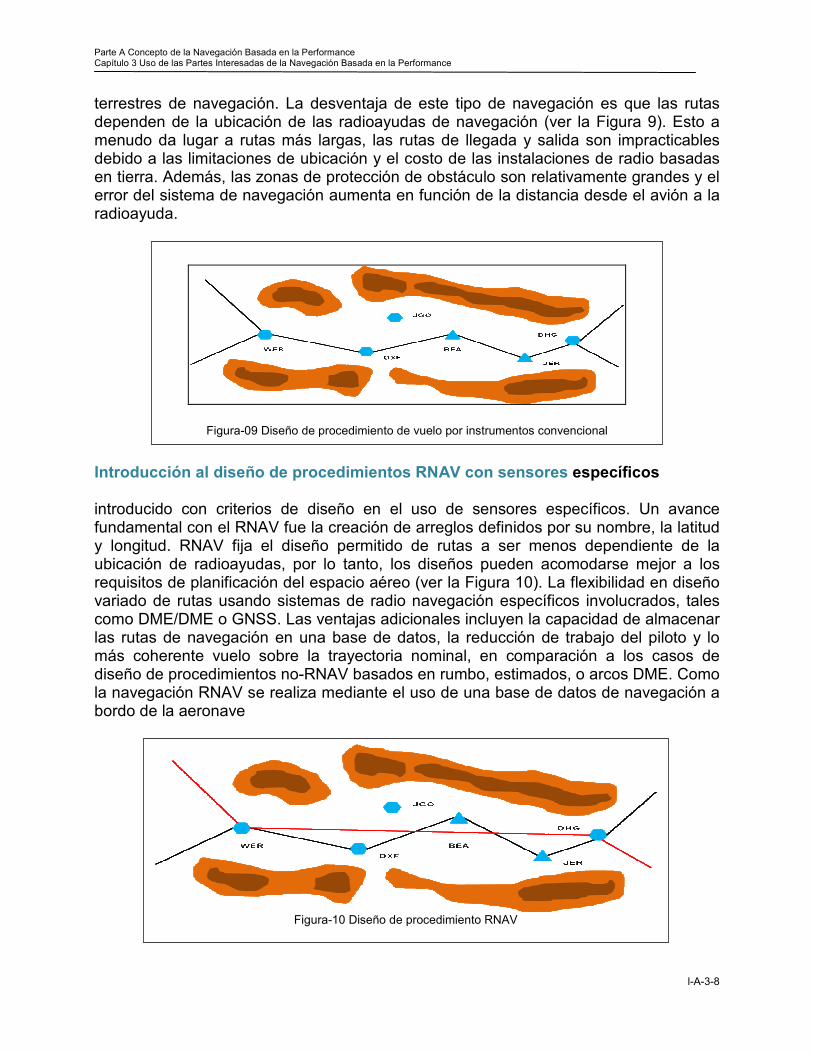
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-8
terrestres de navegación. La desventaja de este tipo de navegación es que las rutas dependen de la ubicación de las radioayudas de navegación (ver la Figura 9). Esto a menudo da lugar a rutas más largas, las rutas de llegada y salida son impracticables debido a las limitaciones de ubicación y el costo de las instalaciones de radio basadas en tierra. Además, las zonas de protección de obstáculo son relativamente grandes y el error del sistema de navegación aumenta en función de la distancia desde el avión a la radioayuda.
Introducción al diseño de procedimientos RNAV con sensores específicos introducido con criterios de diseño en el uso de sensores específicos. Un avance fundamental con el RNAV fue la creación de arreglos definidos por su nombre, la latitud y longitud. RNAV fija el diseño permitido de rutas a ser menos dependiente de la ubicación de radioayudas, por lo tanto, los diseños pueden acomodarse mejor a los requisitos de planificación del espacio aéreo (ver la Figura 10). La flexibilidad en diseño variado de rutas usando sistemas de radio navegación específicos involucrados, tales como DME/DME o GNSS. Las ventajas adicionales incluyen la capacidad de almacenar las rutas de navegación en una base de datos, la reducción de trabajo del piloto y lo más coherente vuelo sobre la trayectoria nominal, en comparación a los casos de diseño de procedimientos no-RNAV basados en rumbo, estimados, o arcos DME. Como la navegación RNAV se realiza mediante el uso de una base de datos de navegación a bordo de la aeronave
Figura-10 Diseño de procedimiento RNAV
Figura-09 Diseño de procedimiento de vuelo por instrumentos convencional
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-9
Inicialmente, el RNAV fue, un cambio importante para el diseñador es la mayor necesidad de aseguramiento de la calidad en el proceso de diseño del procedimiento. A pesar de las ventajas, RNAV tenía varios problemas y características que necesitaron ser considerados. Entre éstos era que a veces las variaciones amplias en la performance del vuelo y trayectorias de avión, así como la incapacidad para predecir el comportamiento de las computadoras de navegación en todas las situaciones. Esto dio lugar a grandes áreas de evaluación de obstáculos, y, como consecuencia, no se han logrado grandes beneficios en términos de reducción de zonas de protección de obstáculos.
Como la experiencia en operaciones RNAV creció, otras diferencias importantes y características se han descubierto. Aviones con equipos RNAV, funciones y configuraciones del sistema iban de lo simple a lo complejo. No hubo ninguna orientación para el diseño en cuanto a los criterios a aplicar para la flota de aviones para los procedimientos de vuelo por instrumentos que se están diseñando. Algunos de los sistemas de comportamiento fue el resultado de la evolución de los sistemas RNAV que vuelan procedimientos en base de datos derivados de instrucciones ATC. Este intento de imitar instrucciones ATC resultado de muchas maneras a describir y definir la trayectoria de vuelo de una aeronave, lo que se observa es una variedad de vuelos. Además, las aeronaves y los avances en la tecnología de navegación causan una serie de tipos de procedimientos, cada una de las cuales requieren diferentes equipos, y la imposición de costos innecesarios en los operadores aéreos. Diseño de procedimientos RNP (antes de la PBN) Los Procedimientos RNP se introdujeron en los PANS-OPS (Doc. 8168), y entraron en vigor en 1998. Estos procedimientos RNP predecesores del actual concepto PBN, según el cual el performance de operación en la ruta es definido, en lugar de identificar un sistema de navegación de radio requerido simplemente. Sin embargo, debido a la insuficiente descripción del performance de navegación y los requerimientos operacionales, había poca diferencia entre percepción y RNAV RNP. Además, la inclusión de elementos convencionales de vuelo, como los procedimientos de sobrevuelo, la variabilidad de trayectorias de vuelo, y adición de espacio aéreo tope no está logrando importantes ventajas en los diseños. Como resultado, hubo una falta de beneficios para el usuario y la comunidad y poca o ninguna implementación. Diseño de Procedimiento PBN Navegación de Área utilizando PBN es una operación basada en la performance en el que la performance de navegación y las características de la aeronave están bien
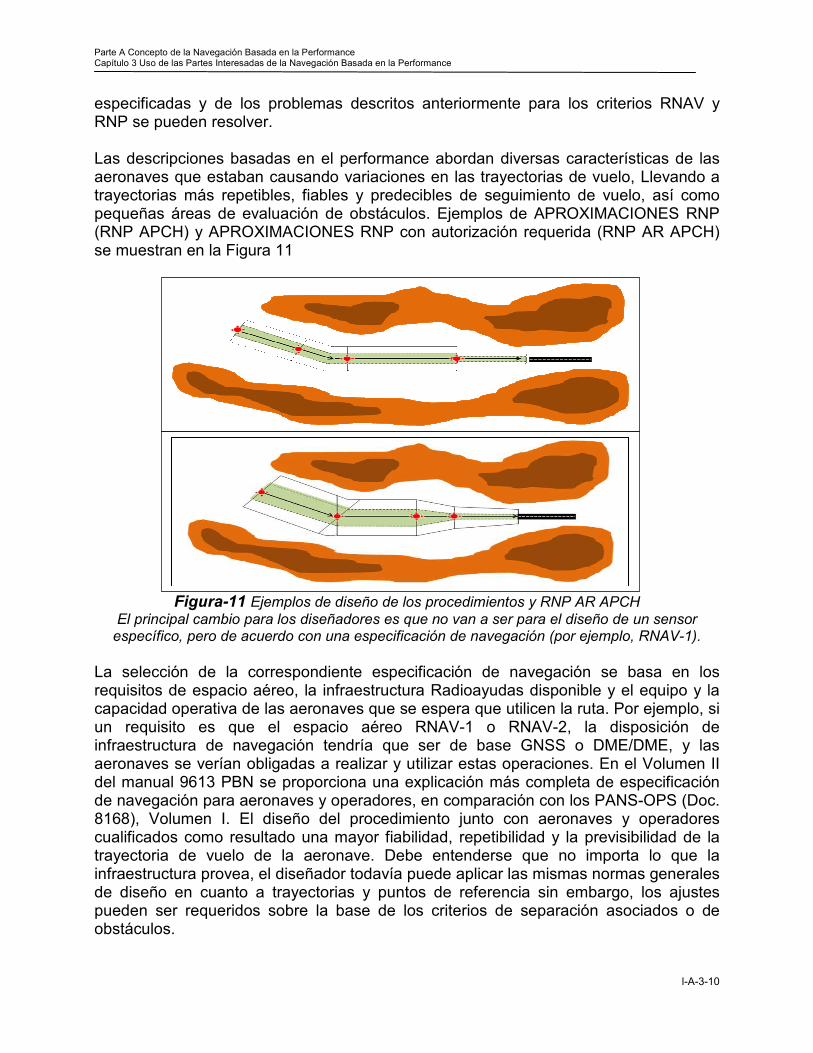
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-10
especificadas y de los problemas descritos anteriormente para los criterios RNAV y RNP se pueden resolver. Las descripciones basadas en el performance abordan diversas características de las aeronaves que estaban causando variaciones en las trayectorias de vuelo, Llevando a trayectorias más repetibles, fiables y predecibles de seguimiento de vuelo, así como pequeñas áreas de evaluación de obstáculos. Ejemplos de APROXIMACIONES RNP (RNP APCH) y APROXIMACIONES RNP con autorización requerida (RNP AR APCH) se muestran en la Figura 11
Figura-11 Ejemplos de diseño de los procedimientos y RNP AR APCH
El principal cambio para los diseñadores es que no van a ser para el diseño de un sensor específico, pero de acuerdo con una especificación de navegación (por ejemplo, RNAV-1).
La selección de la correspondiente especificación de navegación se basa en los requisitos de espacio aéreo, la infraestructura Radioayudas disponible y el equipo y la capacidad operativa de las aeronaves que se espera que utilicen la ruta. Por ejemplo, si un requisito es que el espacio aéreo RNAV-1 o RNAV-2, la disposición de infraestructura de navegación tendría que ser de base GNSS o DME/DME, y las aeronaves se verían obligadas a realizar y utilizar estas operaciones. En el Volumen II del manual 9613 PBN se proporciona una explicación más completa de especificación de navegación para aeronaves y operadores, en comparación con los PANS-OPS (Doc. 8168), Volumen I. El diseño del procedimiento junto con aeronaves y operadores cualificados como resultado una mayor fiabilidad, repetibilidad y la previsibilidad de la trayectoria de vuelo de la aeronave. Debe entenderse que no importa lo que la infraestructura provea, el diseñador todavía puede aplicar las mismas normas generales de diseño en cuanto a trayectorias y puntos de referencia sin embargo, los ajustes pueden ser requeridos sobre la base de los criterios de separación asociados o de obstáculos.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-11
Integración de los criterios operacionales de la aeronave en el presente manual se permitirá criterios de diseño de procedimientos actualizados. Un primer esfuerzo para crear esos criterios es que la especificación de navegación RNP AR APCH. En este caso, el diseño de criterios es tener plenamente en cuenta la capacidad de la aeronave y están plenamente integrados en la aprobación de la aeronave y los requisitos de cualificación. La estrecha relación integrada entre las aeronaves y los procedimientos operacionales y los criterios de diseño de la RNP AR APCH (Doc.9905) requiere un examen más detenido de los aviones y la cualificación y aprobación del operador, ya que es una autorización requerida especial. Este requisito tendrá que abonar los costes a las compañías aéreas y hacer que estos tipos de procedimientos sólo tengan costo beneficio en los casos en que otros criterios de diseño procedimientos no den soluciones.
AERONAVEGABILIDAD Y HOMOLOGACIÓN OPERACIONAL Las aeronaves deben estar equipadas con un sistema RNAV en condiciones para apoyar la aplicación de navegación deseada. El Sistema RNAV y las operaciones de las aeronaves deben ser compatibles con la reglamentación y el material que refleja la especificación de navegación desarrollado para una aplicación de navegación (ver capítulo 1 Doc. 9613) y aprobado por la autoridad reguladora para la operación. Los detalles de la especificación de navegación de la tripulación de vuelo y los aviones necesarios para apoyar la solicitud de navegación. Esta especificación incluye el nivel de funcionamiento de la navegación, la capacidad funcional y consideraciones operativas necesarias para el sistema RNAV. La instalación del sistema RNAV debe ser certificada, de conformidad con el Anexo 8 - Aeronavegabilidad y los procedimientos operativos se deben respetar las limitaciones del manual de vuelo del avión, si las hubiere. El sistema RNAV se debe gestionar de conformidad con las prácticas recomendadas que se describen en el Anexo 6 - Operación de aeronaves y de los PANS-OPS (Doc.8168), Volumen I. tripulación de vuelo y/o los operadores deben respetar el funcionamiento y limitaciones necesarias para la aplicación de navegación. Todas las hipótesis relacionadas con la aplicación de navegación se muestran en la especificación de navegación. La revisión de estas hipótesis es necesaria cuando se proceda a la aprobación de aeronavegabilidad y proceso operacional. Operadores y la tripulación de vuelo son responsables de verificar que el sistema instalado RNAV se opera en las áreas donde el concepto de espacio aéreo y la infraestructura de ayudas a la navegación descrita en la especificación de navegación se han cumplido. Para facilitar este proceso, la certificación y/o la Documentación operativa debe determinar con claridad el cumplimiento de lo relacionado con la especificación de navegación.
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-12
La especificación de navegación se encuentra en el Volumen II, las partes B y C de este manual y no constituye por sí sola textos de orientación y de reglamentación, ya sea en contra de que la aeronave o el operador serán evaluados y aprobado. Los fabricantes originales de equipos (OEMs) al construir sus productos utilizando un código básico de aeronavegabilidad de la aeronave tipo y de conformidad con los textos de orientación pertinentes. Los operadores que están autorizados utilizaran sus normas de funcionamiento. La especificación de navegación ofrece la técnica y criterios operativos. Por lo tanto, todavía hay una necesidad de contar con los instrumentos para su aprobación. Esto puede lograrse a través de un Documento dedicado a la aprobación o mediante el reconocimiento regional existente de la aplicación RNAV o RNP de Documentos de certificación (por ejemplo, la FAA AC o AESA AMC) se puede aplicar para satisfacer los objetivos establecidos en la especificación de navegación PBN. Proceso de aprobación de la aeronavegabilidad El proceso de aprobación de aeronavegabilidad asegura que cada elemento de equipo RNAV instalado es de un tipo y de diseño adecuado a sus funciones y que la instalación funcione correctamente, en virtud de funcionamiento y condiciones. Además, el proceso de aprobación de aeronavegabilidad identifica cualquier limitación de instalación que deben ser considerados para la aprobación operacional. Estas limitaciones y otras informaciones pertinentes a la aprobación de instalación del sistema RNAV se Documentan en el AFM o Suplemento AFM, según el caso. La Información también puede ser renovada y ampliada en otros Documentos tales como manuales de operación del piloto o la tripulación de vuelo y los manuales de funcionamiento. El proceso de aprobación de aeronavegabilidad está bien establecido entre los Estados de los operadores y este proceso se refiere a la función de la especificación de navegación que deben aplicarse. Aprobación de los sistemas RNAV para las operaciones RNAV-X El sistema RNAV instalado debe ser compatible con una serie de requisitos de desempeño, tal como se describe en la especificación de navegación, que define los criterios de exactitud, integridad y continuidad. También debe ser compatible con un conjunto de requisitos funcionales, tienen una base de datos de navegación, y soporta cada terminación de trayectoria como lo exige la especificación de navegación. Nota.- Para ciertas aplicaciones de navegación, una base de datos de navegación puede ser opcional. Para un sistema RNAV multi-sensor, la evaluación debe llevarse a cabo a fin de determinar los sensores que cumplen con los requisitos de funcionamiento que se describe en la especificación de navegación. La especificación de la navegación en general, indica si una sola o una doble instalación es necesaria para el desempeño de los requisitos de disponibilidad y/o
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-13
continuidad. El concepto de espacio aéreo e infraestructura de ayudas para la navegación son elementos clave para decidir si una sola o una doble instalación es necesaria. Aprobación de la RNP para las operaciones RNP-X El sistema RNP instalado debe ser compatible con una serie de requisitos de desempeño RNP, como se describe en la especificación de navegación, que debería incluir una función de supervisión del performance y alerta a bordo. También debe ser compatible con un conjunto de requisitos funcionales, tener una base de datos de navegación, y debería soportar cada una de las terminaciones de trayectoria tal como lo exige la especificación de navegación. Para un sistema RNP multi-sensor, la evaluación debe llevarse a cabo para establecer los sensores que son compatibles con el requisito de desempeño RNP que se describe en la especificación de la RNP.
LA APROBACIÓN OPERACIONAL Los aviones deben estar equipados con un sistema RNAV que habilita la tripulación de vuelo para navegar de acuerdo con el criterio operacional, tal como se define en la especificación de navegación. El Estado del operador es la autoridad responsable de aprobar las operaciones de vuelo. La autoridad competente deberá verificar que los programas operativos son adecuados. Programas de capacitación y los manuales de operaciones deben ser evaluados. El proceso general de aprobación RNAV El proceso de aprobación operacional primero asume que la correspondiente instalación y aprobación de aeronavegabilidad ha sido concedida. Durante la operación, la tripulación debe respetar todas las limitaciones establecidas en el AFM (Manual de vuelo de la aeronave) y suplementos. Se proporcionan los procedimientos normales en la especificación de navegación, incluyendo las medidas necesarias para el Prevuelo que la tripulación lleva a cabo durante la planificación, antes de iniciar el procedimiento y durante el procedimiento.
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-14
Procedimientos de navegación anormales que se prevén en la especificación de navegación, incluyendo la acción detallada de la tripulación que se llevó a cabo en caso fallo del sistema de RNAV a bordo y en caso de incapacidad del sistema para mantener el prescrito rendimiento de las funciones de vigilancia y alerta de a bordo. El operador debe disponer de un sistema para investigar los acontecimientos que afectan a la seguridad de las operaciones a fin de determinar su origen (código de procedimiento, la exactitud del problema, etc.) La lista de equipo mínimo (MEL), debe identificar el equipo mínimo necesario para satisfacer la aplicación de navegación. Entrenamiento de la tripulación de vuelo Cada piloto debe recibir un entrenamiento adecuado, información y material de orientación a fin de realizar una operación segura. Gestión de bases de datos de navegación Cualquier requisito específico en relación con la base de datos de navegación se incluirá en la especificación de navegación, sobre todo si la base de datos de navegación supone integridad para demostrar el cumplimiento de la calidad de los datos en un proceso de garantía, tal como se especifica en DO 200A/EUROCAE ED 76. Nota.-Esta demostración puede ser Documentada con una carta de aceptación (LOA) u otro medio equivalente como aceptada por el Estado.
TRIPULACIÓN DE VUELO Y OPERACIONES DE TRÁNSITO AÉREO Pilotos y controladores de tránsito aéreo son los usuarios finales de la navegación basada en el performance, cada uno con sus propias expectativas de cómo es el uso y la capacidad del sistema RNAV y de cómo afecta sus métodos de trabajo y operaciones cotidianas. Qué necesitan saber los pilotos acerca de la PBN y si las operaciones de la aeronave y la tripulación de vuelo están cualificadas para operar en el espacio aéreo, en un procedimiento o a lo largo de una ruta ATS. Por su parte, los controladores deben suponer que la tripulación de vuelo y los aviones están debidamente cualificados para las operaciones de la PBN. Sin embargo, también requieren una comprensión básica de los conceptos de navegación de Área, la relación entre la RNP y RNAV, y cómo su aplicación afecta a los procedimientos de control, separación y fraseología. Es
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A-3-15
importante tener una comprensión de cómo trabajan los sistemas RNAV, así como sus ventajas y limitaciones son necesarias tanto para los controladores y los pilotos. Para los pilotos, una de las principales ventajas de la utilización de un sistema RNAV es que la función de navegación se realiza por muy precisos y sofisticados equipos de a bordo que permiten una reducción de trabajo de la cabina y, en algunos casos, aumento de la seguridad. En términos de control, la principal ventaja de las aeronaves que utilicen un sistema de rutas ATS RNAV que pueden ser directas, ya que no es necesario cruzar a lo largo de las rutas marcadas por las radioayudas convencionales. Otra ventaja es que las rutas basada en RNAV de llegada y salida pueden complementar e incluso sustituir, vectores de radar, con lo que reduce el trabajo. En consecuencia, las redes de rutas ATS paralelas son generalmente una característica distintiva del espacio aéreo en el que se utilizan aplicaciones RNAV o RNP. Estos sistemas de trayectorias paralelas pueden ser unidireccionales o bidireccionales, en ocasiones, atienden a ejes paralelos que requieran una especificación de navegación diferente para la operación a lo largo de cada ruta, por ejemplo, una ruta RNP-4, junto con una ruta paralela RNP-10 (RNAV-10). Del mismo modo, RNAV SID y STAR se exponen extensamente en algunos espacios aéreos terminales. Desde una perspectiva del franqueamiento de obstáculos, el uso de aplicaciones RNP puede permitir o aumentar el acceso a un aeropuerto en terreno montañoso en los que dicho acceso era limitado o antes no era posible. Los controladores de tránsito aéreo a veces asumen que, todas las aeronaves que operan en un espacio aéreo pueden estar necesariamente aprobadas en el mismo nivel de rendimiento, estos aviones sistemáticamente proporcionan un mantenimiento total de la trayectoria exactamente repetible y predecibles. Esto no es una hipótesis, porque los diferentes algoritmos precisos utilizados en el FMS y las diferentes formas de codificación de datos utilizados en la base de datos de navegación pueden afectar la forma en que una aeronave realiza los virajes. Las excepciones son cuando el Radio to Fix (RF) de los tipos de tramos y/o transiciones de radio referencias (FRT) se utilizan. La experiencia adquirida en los Estados que ya han aplicado la RNP y RNAV demuestra que tales supuestos erróneos pueden ser corregidos por una formación adecuada en la navegación basada en el performance. Capacitación al ATC en las especificaciones RNAV y RNP es indispensable antes de su ejecución a fin de mejorar la confianza y comprensión de los controladores, la ejecución PBN sin la debida atención a la formación del controlador puede tener graves repercusiones sobre todo el calendario del proyecto RNP o RNAV (Ver cada uno de los párrafos de formación del Contralor en cada una de las especificaciones de navegación en el Volumen II de este manual, Las partes B y C)
Parte A Concepto de la Navegación Basada en la Performance Capítulo 3 Uso de las Partes Interesadas de la Navegación Basada en la Performance
l-A-3-16
PROCEDIMIENTOS DE LA TRIPULACIÓN DE VUELO La tripulación de vuelo y los procedimientos que complementan los volúmenes técnicos de la especificación de navegación. Los procedimientos de la tripulación de vuelo generalmente incorporados en el manual de instrucciones de la empresa. Estos procedimientos podrían incluir, por ejemplo, que la tripulación de vuelo notifique las contingencias al ATC (es decir, fallos de equipos y/o condiciones climáticas) que podrían afectar la capacidad de la aeronave a mantener la precisión de la navegación. Estos procedimientos también requieren que la tripulación de vuelo exprese el estado de sus intenciones, coordinar un plan de acción y obtener una autorización ATC revisada en caso de contingencias. A nivel regional, los procedimientos de contingencia deben estar disponibles a fin de permitir a la tripulación de vuelo seguir esos procedimientos en el caso de que no sea posible notificar al ATC sus dificultades.
LOS PROCEDIMIENTOS ATS Se necesitan los procedimientos ATS para el uso en el espacio aéreo que utiliza aplicaciones RNAV y RNP. Los ejemplos incluyen los procedimientos para permitir la funcionalidad a bordo al uso del desplazamiento paralelo (ver el adjunto A) o para habilitar la transición entre espacios aéreos que tienen actuación diferente y requisitos de funcionalidad (es decir las especificaciones de la navegación diferentes). Se requiere una planificación detallada para dar cabida a esa transición, de la siguiente manera:
a) determinar los puntos específicos donde el tránsito se dirige, ya que el tránsito que requiere de una especificación de navegación en el espacio aéreo con menos requisitos estrictos de performance y funcionales y un espacio aéreo que requiere una especificación de navegación más estrictas que tengan el rendimiento y exigencias funcionales;
b) la coordinación de esfuerzos con las partes pertinentes a fin de obtener un acuerdo regional que detalla las responsabilidades.
Los controladores de tránsito aéreo deben adoptar medidas apropiadas para proporcionar una mayor separación y para coordinar con otra dependencia ATC en su caso, capaz de mantener el nivel de rendimiento de navegación prescrito.

I-B-1-1
CAPÍTULO 1
INTRODUCCIÓN A PROCESOS DE IMPLEMENTACIÓN El objetivo de esta parte es proporcionar directrices para la aplicación de RNAV o RNP en una determinada región, Estado o grupo de Estados. La parte B se basa en el concepto general de la PBN que se describe en la Parte A de este volumen, y ofrece un marco para el uso de especificaciones de navegación de la OACI que se publicó en el Volumen II de este manual. PROCESO GENERAL Para ayudar a los Estados en la aplicación de la PBN se proporcionan tres procesos. En la siguiente secuencia: Proceso 1 - Determinar los requisitos
ENTRADA AL PROCESO 1 La entrada para iniciar este proceso es de los objetivos estratégicos y las necesidades operacionales derivadas de los usuarios del espacio aéreo (es decir, militares, civiles, compañías aéreas comerciales o de aviación general, las operaciones IFR/VFR), y los requisitos ATM (por ejemplo, los planificadores del espacio aéreo, los ATC). Directrices de política, tales como las derivadas de las decisiones políticas relativas a la mitigación del medio ambiente también pueden ser los insumos. El proceso debe considerar las necesidades de la comunidad de usuarios del espacio aéreo en un contexto amplio, es decir, IFR, VFR, militar y de la aviación civil (por ejemplo, compañías aéreas, las empresas de aviación general). También deberían tenerse en cuenta las necesidades de los usuarios nacionales e internacionales, así como la aprobación de aeronavegabilidad y operacionales para los operadores. En general, la seguridad, la capacidad y los requisitos de rendimiento de la aplicación debe ser equilibrado; un análisis de todos los requisitos, y la correspondencia entre los requisitos de la competencia, tendrá que ser completado. Primaria y otros medios para cumplir con los requisitos deben ser considerados; métodos para comunicar a los usuarios del espacio aéreo y los requisitos de disponibilidad (y cortes) de los servicios
Parte B Concepto de la Navegación Basada en la Performance Capítulo 1 Introducción a Procesos de Implementación
l-B-1-2
necesitan ser identificados y detallada planificación de las necesidades que se emprendan para la transición al nuevo concepto del espacio aéreo.
PASOS EN EL PROCESO 1
Paso 1
Formular el concepto de espacio aéreo
Un concepto del espacio aéreo sólo es útil si está definida con el suficiente detalle como para que puedan apoyar las funciones de navegación y puedan ser identificadas. La elaboración del concepto del espacio aéreo es mejor realizarlo por un equipo multidisciplinario como frente a una sola especialidad (véase también la parte A del capítulo 3 de este volumen). Este equipo debe ser el que se esperaba de los controladores de tránsito aéreo y los planificadores del espacio aéreo (de la ANSP), pilotos, especialistas en diseño de procedimientos, especialistas en aviónica, reguladores de normas de vuelo y aeronavegabilidad y usuarios del espacio aéreo. Juntos, este equipo debería desarrollar el concepto de espacio aéreo usando orientaciones generales proporcionadas por los objetivos estratégicos. Factores que deberían incluirse detalladamente:
a) Organización y gestión del espacio aéreo (es decir, la ubicación de rutas ATS, SID/ STAR, sectorización ATC);
b) Las mínimas de separación y el espaciamiento de ruta;
c) Opciones de procedimientos de aproximación por instrumentos;
d) Como el ATC opera en el espacio aéreo;
e) prevé operaciones de la tripulación de vuelo, y
f) Aprobaciones operacionales y de aeronavegabilidad
Recuadro 1 al 4 proporcionar información ampliada para las consideraciones del equipo:
Recuadro 1 - las necesidades de los usuarios del espacio aéreo Los desarrolladores de concepto de espacio aéreo deben considerar las necesidades de la comunidad de usuarios del espacio aéreo en un contexto amplio, es decir, IFR, VFR, militares y de la aviación civil (por ejemplo, compañías aéreas, las empresas de aviación general). También deberían tenerse en cuenta tanto los requisitos para usuarios nacionales e internacionales
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-1-3
En general, la seguridad, la capacidad y los requisitos de rendimiento de la aplicación deben ser equilibrados; un análisis de todos los requisitos, y la correspondencia entre los requisitos de la competencia, será necesario ser considerados los medios primarios y alternos para cumplir con los requisitos; los métodos para comunicar a los usuarios del espacio aéreo los requisitos y la disponibilidad (y los cortes), de los servicios tienen que ser identificados, y una planificación detallada necesaria para llevar a cabo la transición al nuevo concepto del espacio aéreo.
Recuadro 2 - requisitos del espacio aéreo
Con el fin de identificar los requisitos del espacio aéreo, es necesario:
a) recopilar y analizar datos sobre el actual tránsito aéreo y el crecimiento del mismo dentro y en torno al espacio aéreo específico.
b) entender el flujo de tránsito, el volumen de tránsito, y la composición del tránsito aéreo, tanto en el espacio aéreo examinado y en el espacio aéreo adyacente. Es importante tener en cuenta la transición de espacio aéreo y los procedimientos para la integración de las operaciones a través de las fronteras y el espacio aéreo de las fronteras nacionales.
c) Evaluar la vigilancia, las comunicaciones y la infraestructura de navegación disponibles en el espacio aéreo.
d) Las rutas ATS y otros criterios de diseño de procedimientos deberían adoptarse del material de la OACI si existen en la medida de lo posible.
f) Identificar las funciones mínimas de navegación necesarias para apoyar los requisitos de funcionamiento y comparar estas con los equipos de las flotas de aeronaves que operan en el espacio aéreo sujeto.
g) definir el espaciamiento de rutas ATS antes del diseño del espacio aéreo, ruta o procedimiento. El espaciado de rutas ATS debe basarse en la seguridad global, la capacidad y requisitos de eficiencia del concepto espacio aéreo.
Los requisitos del espacio aéreo pueden identificar la necesidad de la vigilancia del performance de bordo y la alerta, por ejemplo, necesidad de especificar rutas paralelas muy juntas (es decir, en consonancia con el espaciamiento de las rutas en segmentos ruta en línea recta y con virajes). Este tipo de requisitos deben ser observados cuidadosamente, ya que determinan directamente las funciones de navegación discutidos en El paso 4 - Identificar la performance necesaria de navegación y las exigencias funcionales.
Parte B Concepto de la Navegación Basada en la Performance Capítulo 1 Introducción a Procesos de Implementación
l-B-1-4
Recuadro 3 - requisitos de Aproximación
Como principio general, los requisitos de aproximación deberían tomar ventaja de las capacidades existentes de las aeronaves como sea posible. Además, los diseñadores deben utilizar los criterios de diseño de procedimientos para reducir al mínimo el costo de la aprobación del operador y armonizar la implementación a través de las fronteras.
Además de las consideraciones anteriores, el diseñador tendrá que determinar qué tipo (s) de aproximaciones se requieren con el fin de satisfacer las necesidades del espacio aéreo. Estas consideraciones incluyen:
a) Aproximación en línea recta o en curva;
b) Aproximación frustrada en línea recta o en curvas;
c) Pistas individuales o múltiples, tales como:
1) pistas de aterrizaje múltiples o paralelas convergentes;
2) Aproximaciones independientes o dependientes;
d) necesidad de procedimientos de aproximación de respaldo (por ejemplo, si se produce un corte en el sistema GPS, que está disponible para la aproximación?).
Recuadro 4 - Otros requisitos
En el diseño del espacio aéreo (ruta o procedimiento), los diseñadores deben identificar:
-Los factores ambientales que requieren consideraciones y adaptación, y
-Cualquier impacto previsto de la presentación del plan de vuelo o tratamiento.
Paso 2 Evaluación de la flota existente y la capacidad de la Infraestructura de ayudas a
la navegación disponible Los planificadores deben entender la capacidad de las aeronaves que vuelan en el espacio aéreo a fin de determinar el tipo de aplicación que es factible para los usuarios. Entender lo que está disponible en términos de infraestructura de ayudas a la navegación, es esencial para determinar cómo y si una especificación de navegación puede ser apoyada. Las siguientes consideraciones deben tenerse en cuenta. Evaluación de la capacidad de la flota de aviones
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-1-5
Las Flotas de aviones no son homogéneas en términos de capacidad del sistema RNAV. Esto se debe a que hasta cinco generaciones de aeronaves pueden estar activas en todas las grandes flotas, como las que operan en Europa, América del Norte y Extremo Oriente. Por lo tanto, el espacio aéreo para dar cabida a aeronaves que operen con tecnología que data de la década de los 70’s junto con aviones fabricados en los años 80’s, 90’s y desde el año 2000. A menudo, no es rentable adaptar un avión viejo. Dado que la mayoría de los Estados deberán apoyar a un medio ambiente de tránsito con equipo mixto para un período de tiempo significativo, el diseñador del espacio aéreo debe conocer las características y el nivel de equipos de la flota que opera en el espacio aéreo. Las preguntas que podrían surgir son:
� Son suficientes los aviones provistos de equipos con capacidad GNSS?
� Las fallas de los equipos GNSS puede ser mitigada por otros medios de navegación (por ejemplo, a base de DME RNAV, navegación convencional o servicio de vigilancia ATS?)
� ¿Todos los aviones aprobados para IFR llevan equipos VOR y DME, y está el equipo integrado al sistema RNAV?
� Cuando no hay suficientes ayudas a la navegación a disposición para proporcionar adecuada cobertura de la señal, puede tenerse lagunas o vacios en la cobertura y tenerse en cuenta la dependencia de los sistemas inerciales de los aviones?
Se deberá tener en cuenta de acoger a los usuarios con distintos niveles de equipo de navegación. Si un ambiente de performance mixto RNAV (o una mezcla de ambiente convencional y RNAV), se ha decidido por el concepto del espacio aéreo y, a continuación, los requisitos de control del tránsito aéreo también deben abordarse para estas operaciones. La experiencia sugiere que el manejo de tránsito mixto de equipo de navegación puede, dependiendo del nivel de los equipos mixtos y de operaciones, afectar negativamente la capacidad de un espacio aéreo y un volumen de trabajo inadecuado de los controladores. La evaluación de la infraestructura de ayudas para la navegación Los Estados que actualmente proporcionan una red de radioayudas de base terrestre para apoyar operaciones en ruta, terminal y aproximación. El uso de rutas RNAV y aproximaciones se está expandiendo, lo que permite a los operadores a tomar ventaja de los sistemas de a bordo. La introducción de la navegación por satélite, sobre la base del sistema mundial de navegación por satélite (GNSS), ha traído a la RNAV al alcance de todos los operadores, y permite considerar una transición completa al RNAV basada en operaciones en ruta y en áreas terminales. Sin embargo, esa transición se puede tomar
Parte B Concepto de la Navegación Basada en la Performance Capítulo 1 Introducción a Procesos de Implementación
l-B-1-6
una serie de años. Mientras tanto, la mayoría de Estados puede esperar para determinar la necesidad de mantener algunas radioayudas en tierra ya sea para ofrecer una alternativa de entrada a los sistemas RNAV y servir de apoyo a una reversión de navegación convencional o un medio ambiente para proporcionar una navegación convencional para usuarios no equipados con sistemas RNAV. Factores que determinan el alcance de un programa de sustitución de radioayudas terrenas incluyen:
� El ritmo al que los explotadores de aeronaves adquieren aviónica GNSS;
� El alcance de la obligación de retener algunas radioayudas para los usuarios no equipados con el GNSS, o como respaldo al GNSS (por ejemplo, como parte de mitigación de los posibles peligros planteados por la interferencia de señales GNSS);
� la existencia y antigüedad de la infraestructura existente de radioayudas.
Es importante que la implementación de una aplicación RNAV no deba ser la causa para la instalación de nuevas infraestructuras de radioayudas. La introducción de aplicaciones RNAV puede resultar ser capaz de mover algunas de las actuales radioayudas (por ejemplo, cuando se trasladó un DME ya no tienen que ser reubicado con un VOR).
Paso 3 Evaluación del actual sistema de vigilancia y los ATS, infraestructura de
comunicaciones y el sistema ATM
Un sistema de tránsito aéreo es la suma de CNS/ATM y de las capacidades disponibles. PBN es sólo el componente de navegación de los sistemas CNS / ATM. No puede ser aplicado con éxito en condiciones de seguridad y sin la debida consideración de la comunicación y la infraestructura de vigilancia de ATS que se dispone para apoyar la operación. Por ejemplo, una ruta RNAV-1 se requiere diferente espaciamiento de rutas ATS con ambiente radar, o no radar. La disponibilidad de las comunicaciones entre la aeronave y proveedor de servicios de tránsito aéreo pueden afectar el nivel de capacidad de intervención del tránsito aéreo necesarias para la seguridad de las operaciones. Infraestructura de vigilancia ATS Los Estados que actualmente se apoyan de radares primarios y secundarios para la vigilancia de operaciones en ruta, terminal y aproximaciones. Y los Más recientes los sistemas de vigilancia ATS, como la vigilancia dependiente automática-radiodifusión (ADS-B), debería desempeñar un papel cada vez mayor, especialmente en los ambientes de procedimientos controlados. Sin embargo, la dependencia de la ADS en la solución de navegación ha de tenerse en cuenta al realizar la evaluación global de la
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-1-7
operación - ver Evaluación de la ADSP de apoyo a los servicios de tránsito aéreo y las directrices para la aplicación (Circular 311). Sin sólidos sistemas de vigilancia ATS, el espaciamiento de ruta RNAV es grande. La aplicación de la RNP en dichos ambientes puede compensar en cierta medida la falta de vigilancia de la cobertura de los ATS. Infraestructura de comunicación Los Estados que actualmente proporcionan servicios de comunicación de voz a través de radio VHF y HF. Servicio VHF, en particular, es ampliamente disponible y se espera que se mantenga (con o sin aumento de enlace de datos de comunicaciones). Sistemas ATM La evolución del sistema ATM de un Estado para satisfacer las necesidades de implantación de la PBN debe ser considerada. Si los mínimos de separación se reducen y esto afecta los límites de alerta y las herramientas de detección de conflictos, o si las mínimas de separación son usadas en diferentes tipos de rutas o capacidades de aeronaves, esto debe ser considerado en la evolución del sistema de ATM. Si el tiempo requerido de llegada se incluye en el concepto de un espacio aéreo, la automatización del sistema tendrá que ser diseñado en consecuencia. Esta misma consideración se aplica con el uso de las clasificaciones de equipo (por ejemplo, sufijos del plan de vuelo), el controlador fusiona las herramientas y el espaciamiento, y cualquier otra característica de automatización de control del tránsito aéreo que permitan maximizar los beneficios de la RNAV y RNP.
Paso 4 Identificar las necesidades de performance de navegación
y las exigencias funcionales Cabe señalar que la decisión de la OACI sobre la elección de una especificación de navegación RNAV o RNP no es sólo determinada por los requisitos de rendimiento de las aeronaves (por ejemplo, la exactitud, integridad, continuidad, disponibilidad), pero también puede ser determinada por la necesidad de requerimientos funcionales específicos (por ejemplo, transición de tramos/terminación de trayectorias, la capacidad de compensar paralelamente, patrones de espera, las bases de datos de navegación). (Ver Anexo A). La propuesta de considerar requerimientos funcionales de navegación, también es necesario considerar:
a) la complejidad de los procedimientos RNAV previstos, el número de puntos necesarios para definir el procedimiento, el espaciamiento entre los puntos de recorrido y la necesidad de definir cómo se ejecuta un viraje, y
b) Si los procedimientos previstos el objetivo es simplemente conectarse con las operaciones en ruta y se puede limitar operaciones por encima de la altitud
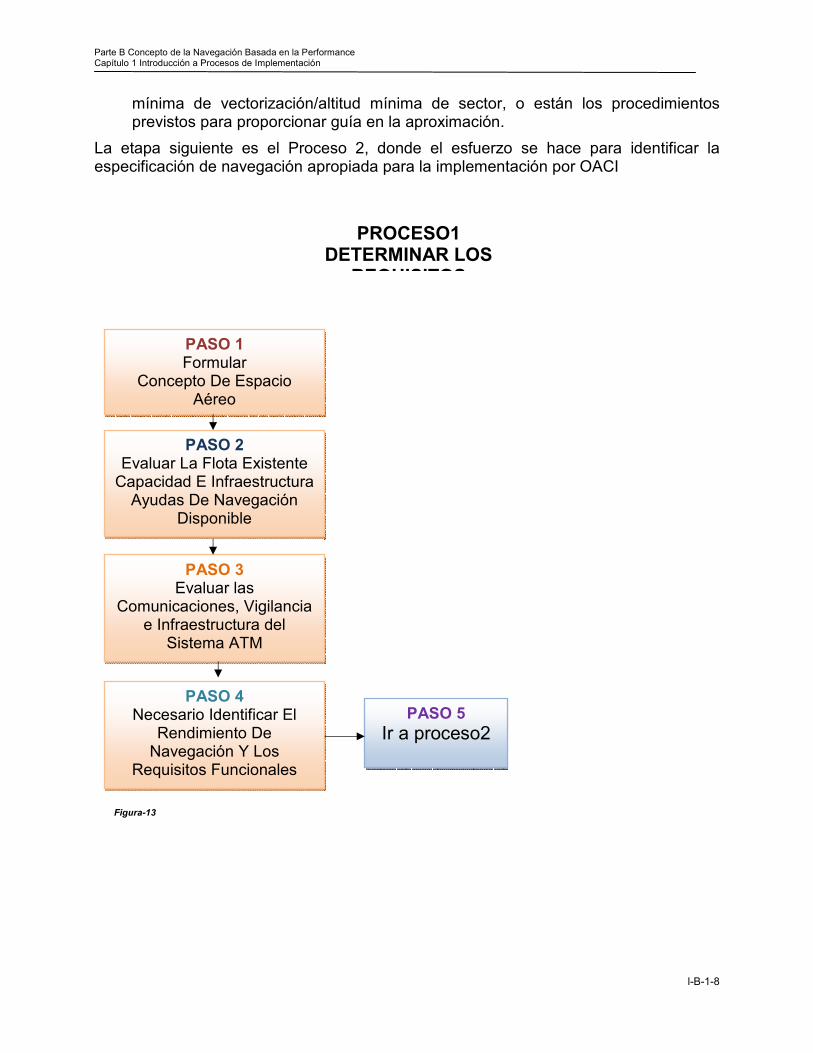
Parte B Concepto de la Navegación Basada en la Performance Capítulo 1 Introducción a Procesos de Implementación
l-B-1-8
mínima de vectorización/altitud mínima de sector, o están los procedimientos previstos para proporcionar guía en la aproximación.
La etapa siguiente es el Proceso 2, donde el esfuerzo se hace para identificar la especificación de navegación apropiada para la implementación por OACI
PASO 1 Formular
Concepto De Espacio Aéreo
PASO 2 Evaluar La Flota Existente Capacidad E Infraestructura Ayudas De Navegación
Disponible
PASO 3 Evaluar las
Comunicaciones, Vigilancia e Infraestructura del
Sistema ATM
PASO 4 Necesario Identificar El
Rendimiento De Navegación Y Los
Requisitos Funcionales
PASO 5 Ir a proceso2
Figura-13
PROCESO1 DETERMINAR LOS
REQUISITOS
I-B-2-1
CAPÍTULO 2
PROCESO 2: IDENTIFICACIÓN DE LASESPECIFICACIONES DE NAVEGACIÓN DE
OACI PARA LA IMPLEMENTACIÓN
El objetivo del Proceso 2 es identificar la especificación (es) de navegación de la OACI que apoye el concepto del espacio aéreo y las exigencias funcionales de navegación, tal como se definen en el Proceso 1. Un resumen de Proceso 2 se proporciona al final de este capítulo.
ENTRADA AL PROCESO 2 Las exigencias funcionales de navegación, la capacidad de la flota, y la capacidad CNS/ATM han sido identificadas en el Proceso 1. Esto proporcionará el contexto específico en contra de que los planificadores evalúen su capacidad para cumplir los requisitos de una especificación de navegación particular de la OACI. PASOS EN EL PROCESO 2
Paso 1 - Revisión de las especificaciones de navegación OACI en el Volumen II
a) El primer paso en el Proceso 2 tiene por objeto encontrar una posible coincidencia entre las necesidades detectadas en el proceso 1 y los contenidos en una o más de las especificaciones de navegación de la OACI en el Volumen II.
b) En la revisión de una o más posibles especificaciones de navegación de la OACI, los planificadores tendrán que tener en cuenta la salida del Proceso 1 con respecto a:
I. la capacidad de la flota de las aeronaves existentes y la infraestructura de ayudas para la navegación disponibles para satisfacer las necesidades de una especificación de navegación de la OACI en particular. (Paso 1 en la Figura-14), y
II. las capacidades de las comunicaciones e infraestructura de vigilancia ATS y del sistema ATM en apoyo de aplicación de esta especificación de navegación de la OACI en particular, (Ver Figura-14 Paso IB).
Parte B Concepto de la Navegación Basada en la Performance Capítulo 2 Identificación de las Especificaciones de Navegación de OACI para la Implementación
l-B-2-2
Ejemplos de algunas preguntas que deben considerarse cuando se comparan los resultados del proceso 1 con las especificaciones de navegación de la OACI se puede encontrar en el recuadro 5.
Paso 2 Identificar la especificación de navegación OACI adecuada
para aplicar en el ambiente especifico CNS / ATM, Si los planificadores determinan que una especificación de navegación de la OACI en el Volumen II puede ser apoyado por los equipos de la flota, infraestructura de ayudas a la navegación, las comunicaciones, la vigilancia ATS y las capacidades ATM disponibles en el Estado, proceder al Proceso 3: Planificación e implementación. Si una especificación de navegación de la OACI no puede ser apoyada, continúe con el Proceso 2, Paso 3.
Paso 3
Identificar los compromisos con el concepto de espacio aéreo los requisitos funcionales de navegación (si es necesario)
Este paso es seguido en una coincidencia exacta entre una especificación de navegación de la OACI en particular, y el equipo de la flota, infraestructura de ayudas a la navegación, las comunicaciones, la vigilancia ATS y las capacidades ATM disponibles en el Estado si no se puede hacer. Está dirigido a cambiar ya sea el concepto de espacio aéreo o las exigencias funcionales de navegación con el fin de seleccionar una especificación de navegación de la OACI. Por ejemplo, podría reducirse las necesidades operacionales si se reflejan en el concepto de espacio aéreo, o medios alternativos identificados para alcanzar una similar (si no es idéntica) el resultado operativo. Nota.- La aplicación de especificaciones de navegación de la OACI pueden mejorar la seguridad mediante el establecimiento de requisitos de navegación uniforme de las
Recuadro 5 Ejemplos de preguntas a ser consideradas cuando se comparan los resultados de
Proceso 1 con las especificaciones de navegación de la OACI
Se prevé la estructura de rutas (a partir de la noción de espacio aéreo) son compatibles? Considere el espacio entre las distintas rutas y la existencia de múltiples rutas. Son los sistemas RNAV diseñados para funcionar con la misma infraestructura de ayudas a la navegación? Esta la infraestructura de ayudas a la navegación disponible (evaluada en el Proceso 1) lo mismo como la infraestructuras de la ayudas a la navegación asociadas a las especificaciones de navegación de la OACI?
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-2-3
aeronaves y a través de diferentes regiones. Las especificaciones de navegación también son fuentes importantes para el control de los costos a los operadores. Las especificaciones de navegación de los aviones se han asociado a las necesidades, expectativas de la infraestructura de ayudas a la navegación, y los requisitos de espaciamiento de las rutas. Los planificadores del espacio aéreo deben revisar el concepto de navegación requerida y las funciones descritas en el Proceso 1 a fin de determinar qué ventajas y desventajas se pueden encontrar, a fin de aplicar una especificación de navegación existente de OACI. Las siguientes son las razones que podrían explicar la falta de un encuentro:
a) El análisis original de los requisitos funcionales de navegación (del Proceso 1), no identifican correctamente todas las funciones necesarias para el espacio aéreo. Esto podría ser debido a que una capacidad funcional se ha omitido o porque era identificada innecesariamente. EL análisis inicial podría haber omitido algunas o la totalidad de los tipos de tramos requeridos para la RNAV en espacio aéreo terminal, o fracasado por no exigir las transiciones que fija el radio cerca a las trayectorias paralelas que se llevan a cabo en las aplicaciones en ruta.
b) Los requisitos funcionales de navegación identificados en el Proceso 1 se definen en torno a la capacidad de flota existente que operan en el espacio aéreo, con la esperanza de que esta capacidad sería apropiada para el concepto de espacio aéreo. Si el uso de esta capacidad de la flota sigue siendo la meta, entonces será necesario cambiar el concepto de espacio aéreo.
En la mayoría de los casos, será posible realizar suficientes compromisos en el concepto espacio aéreo original o funciones de navegación requerida del Proceso 1, de tal que una especificación de navegación de la OACI puede ser entonces seleccionada. Una vez los compromisos se han hecho que permitirá la selección de una especificación de navegación de la OACI, proceder al Proceso 3: Planificación e implementación.
Ejemplo:
Compensación de un requisito funcional de navegación
Si la única diferencia entre la especificación de navegación de la OACI y las necesidades funcionales de navegación detectadas en el Proceso 1 es un requisito para la capacidad de compensar el vuelo paralelo, podría ser posible ajustar el requisito funcional. Una alternativa para la capacidad de compensar el vuelo paralelo de un espacio aéreo continental, podría ser la creación de áreas de vectorización radar en las que los aviones podrían ser vectorizados fuera de la trayectoria nominal para facilitar el ascenso y el descenso y el adelantamiento de tránsito
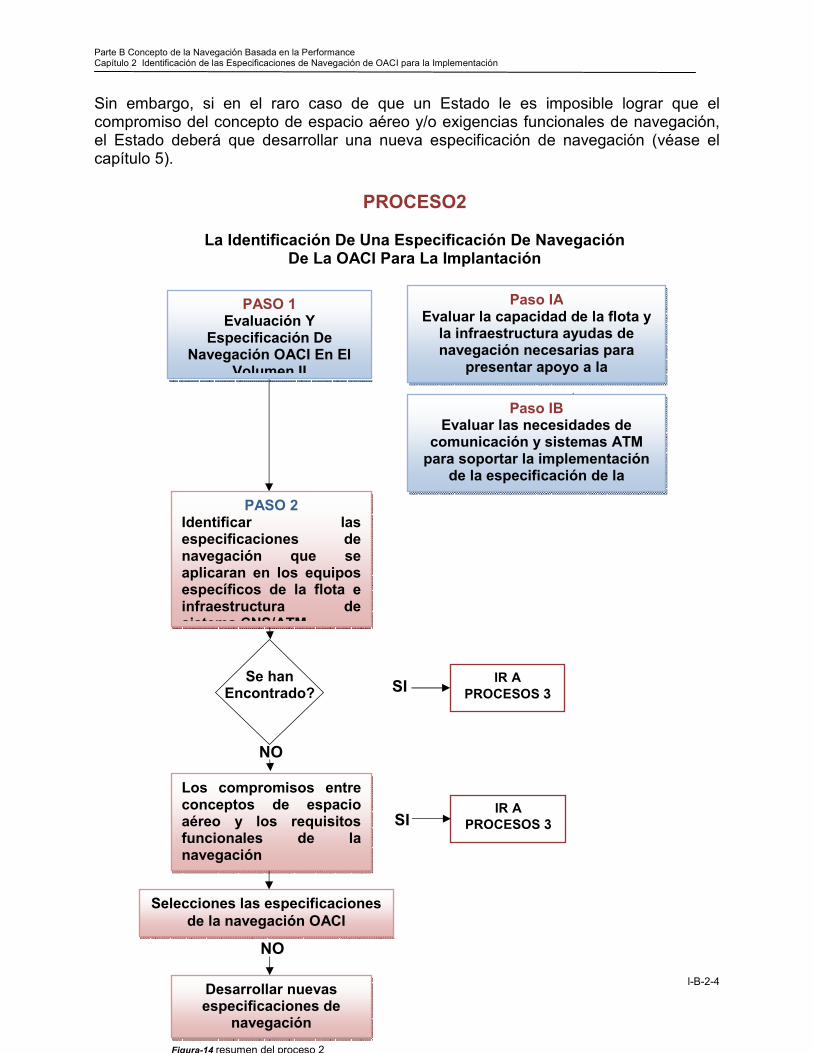
Parte B Concepto de la Navegación Basada en la Performance Capítulo 2 Identificación de las Especificaciones de Navegación de OACI para la Implementación
l-B-2-4
Sin embargo, si en el raro caso de que un Estado le es imposible lograr que el compromiso del concepto de espacio aéreo y/o exigencias funcionales de navegación, el Estado deberá que desarrollar una nueva especificación de navegación (véase el capítulo 5). PROCESO2
La Identificación De Una Especificación De Navegación
De La OACI Para La Implantación
Figura-14 resumen del proceso 2
Paso IA Evaluar la capacidad de la flota y
la infraestructura ayudas de navegación necesarias para
presentar apoyo a la especificación de la Navegación
Paso IB Evaluar las necesidades de
comunicación y sistemas ATM para soportar la implementación
de la especificación de la navegación OACI
PASO 1 Evaluación Y
Especificación De Navegación OACI En El
Volumen II
PASO 2 Identificar las especificaciones de navegación que se aplicaran en los equipos específicos de la flota e infraestructura de sistema CNS/ATM
Los compromisos entre conceptos de espacio aéreo y los requisitos funcionales de la navegación
Selecciones las especificaciones de la navegación OACI
IR A PROCESOS 3
IR A PROCESOS 3
SI
SI
NO
NO
Desarrollar nuevas especificaciones de
navegación
Se han Encontrado?
I-B-3-1
CAPÍTULO 3
PROCESO 3: PLANIFICACIÓN E IMPLEMENTACIÓN INTRODUCCIÓN
El proceso descrito en este capítulo se refiere a la planificación y ejecución de la navegación basada en el Performance (Rendimiento). Siguiente a la finalización del proceso 1 y 2. Ver Recuadro 6 para una discusión detallada de algunas consideraciones importantes que los planificadores deben tener en cuenta a la hora de elaborar el plan de ejecución. Un resumen del Proceso 3 se proporcionan al final del
Recuadro 6 Consideraciones relativas a la aplicación
En la aplicación de una de las especificaciones de la OACI para la navegación oceánica, continental y continental remota de las operaciones en ruta, tal como se describe en el Volumen II, debe tenerse en cuenta la necesidad de acuerdo regional o multi-regional. Esto se debe a que la conectividad y continuidad con operaciones en espacio aéreo adyacente deben considerarse a fin de maximizar los beneficios. Por las operaciones terminales y de aproximación, la aplicación de una especificación de navegación de la OACI en el Volumen II más probable que ocurra en un solo Estado. Algunas TMA son adyacentes a las fronteras nacionales para coordinación multinacional que sería probablemente necesario. Cuando el cumplimiento de una especificación de navegación de OACI se prescribe para la operación en un espacio aéreo o rutas ATS, estos requisitos se indicarán en las publicaciones de información aeronáutica del Estado. La decisión de mandato de un requisito para uno o más especificaciones RNAV o RNP de la OACI sólo debe considerarse después de varios factores que se han tenido en cuenta. Estas incluyen, pero no están limitadas a:
a) Los requisitos operativos de los usuarios del espacio aéreo (civil y militar, las operaciones IFR), así como los de la ANSP;
b) Los requisitos reglamentarios en los planos internacional y nacional;
c) La proporción de la población de las aeronaves que actualmente son capaces de cumplir los requisitos especificados, y el costo que se incurra por parte de los operadores que se necesitan para equipar a los aviones para cumplir los requisitos de la especificación de navegación;
d) Los beneficios en términos de seguridad, la capacidad, la mejora del acceso al espacio aéreo y/o a los aeropuertos, medio ambiente que se derivan de la aplicación del concepto de espacio aéreo;
e) El impacto sobre los operadores en términos de entrenamiento adicional a la tripulación de vuelo;
Parte B Concepto de la Navegación Basada en la Performance Capítulo 3 Planificación e Implementación
l-B-3-2
este capítulo en la Figura-15
ENTRADAS AL PROCESO 3
Las exigencias funcionales de navegación, la capacidad de la flota, capacidad CNS/ ATM han sido identificadas en el Proceso 1. Las Especificación (es) de navegación de la OACI han sido seleccionadas en el Proceso 2. Los requisitos del Estado o de una posible nueva región deben ser identificados e incorporados para su aplicación.
PASOS EN EL PROCESO 3
Paso 1 Formular el plan de seguridad
El primer paso en el proceso 3 es la formulación de un plan de seguridad para la aplicación PBN. La orientación para la formulación de un plan de seguridad se puede encontrar en Manual de gestión de la seguridad (SMM) (Doc. 9859). Dependiendo de la naturaleza de la aplicación, esto podría ser de un Estado o un plan de seguridad regional. Normalmente, este tipo de plan se desarrolló junto con una oficina de seguridad de la ANSP, a satisfacción de la autoridad reguladora. Este plan de seguridad detalla la forma en que la evaluación de la seguridad se realizará a la propuesta de aplicación RNAV o RNP.
Paso 2 Validar el concepto de la seguridad del espacio aéreo
La validación de un concepto de espacio aéreo supone completar una evaluación de la seguridad. De esta evaluación, adicional los requisitos de seguridad se pueden identificar que deben incorporarse en el concepto del espacio aéreo antes de su aplicación.
f) El impacto sobre la tripulación de vuelo en términos de volumen de trabajo, y
g) El impacto en los servicios de tránsito aéreo en términos de volumen de trabajo del controlador y servicios necesarios, (incluida la automatización y procesamiento de los cambios del plan de vuelo). Especial atención debe ser tenida en cuenta a los posibles impactos de trabajo y la eficiencia de explotación de navegación en entornos mixtos. (Ver Recuadro 7 tras el paso 7 para continuar el debate de la mezcla de equipo.)
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-3-3
Cuatro medios de validación son tradicionalmente utilizados para validar un concepto de espacio aéreo:
a) La modelización del espacio aéreo;
b) Simulación en tiempo rápido (FTS);
c) Simulación en tiempo real (RTS);
d) Ensayos en vivo de ATC.
Para los cambios simples de espacio aéreo, puede ser necesario utilizar todos los medios para la validación por encima de cualquier aplicación. Para los cambios complejos de espacio aéreo, sin embargo, simulación en tiempo rápido y simulación en tiempo real puede proporcionar información esencial sobre la seguridad (y eficiencia) y las cuestiones de fomentar su uso. La aplicación de las nuevas especificaciones de navegación puede ir desde lo simple a través de cambios importantes en el espacio aéreo. Los cuatro tipos de validación se examinan brevemente a continuación. La modelización del espacio aéreo La modelización del espacio aéreo es un primer paso porque proporciona una cierta comprensión de cómo la propuesta de implementación trabajara, pero aun no requiere de la participación de los pilotos y controladores. Un modelo de espacio aéreo está basado en computador, por lo que es posible realizar cambios con rapidez y eficacia para las rutas ATS, circuitos de espera, estructuras o sectorización del espacio aéreo para determinar los escenarios más beneficiosos (por ejemplo es decir, los tipos que vale la pena llevar adelante a la más sofisticada validación). Usando un modelo de espacio aéreo basado en ordenador puede facilitar la identificación de escenarios no viables de funcionamiento a fin de que un gasto innecesario y el esfuerzo no se pierdan en las fases más avanzadas de validación. El papel principal del modelo de espacio aéreo es para eliminar escenarios de espacio aéreo no viable y en apoyo de la evaluación cualitativa del concepto más desarrollado. Simulación en tiempo rápido (FTS) Siguiendo la fase de modelización del espacio aéreo basado en computador, puede ser útil para correr una simulación de tiempo rápido (FTS). Una evaluación más sofisticada de modeladores de espacio aéreo, una simulación de tiempo rápido regresa a resultados más precisos y realistas, mientras que los que aún no requieren la participación activa de los controladores o pilotos, sin embargo, en términos de recogida de datos de entrada, la preparación puede ser exigente y consume tiempo. Simulación en tiempo real (RTS) La manera más realista para validar un concepto del espacio aéreo es el objeto de la simulación en tiempo real (RTS). Para Estos simuladores de forma realista reproducen operaciones ATM y requieren de activa participación proactiva de los controladores o "pseudo" pilotos simulados. En algunos casos, sofisticados simuladores en tiempo real RTS puede estar vinculado a varios simuladores multi cabina que simula de forma
Parte B Concepto de la Navegación Basada en la Performance Capítulo 3 Planificación e Implementación
l-B-3-4
realista el rendimiento del vuelo que se utiliza durante la simulación. Una de las dificultades con que puede tropezar la simulación en tiempo real es que la performance de navegación de la aeronave es demasiada perfecta. "Aeronave" en simulación en tiempo real puede operar con una precisión de navegación que no es realista, habida cuenta de las realidades del tiempo, rendimiento de aeronaves individuales, etc. En tales casos, los índices de error de vivir operaciones son analizadas y estas pueden estar en el guion de la RTS. Ensayos en vivo de ATC Ensayos en vivo de ATC generalmente se usan para verificar las prácticas de operación o procedimientos cuando las sutilezas de la operación son tales FTS y RTS que no se ajusten a los requisitos de validación. Es importante señalar que el diseño de Procedimientos del paso 3 debe completarse antes de ensayos en vivo de ATC pueden llevarse a cabo.
Paso 3 Diseño de Procedimientos
Un sistema total de aproximación para la aplicación del concepto de espacio aéreo significa que el proceso de diseño de procedimientos es un elemento integral. Por lo tanto, el diseñador de procedimientos es un miembro clave del equipo de desarrollo del concepto espacio aéreo. Los diseñadores de procedimientos necesitan garantizar que los procedimientos pueden ser codificados bajo el formato ARINC 424. Actualmente, este es uno de los principales desafíos que enfrentan los diseñadores de procedimientos. Muchos no están familiarizados con los códigos utilizados en las terminaciones de trayectorias que usan los sistemas RNAV o las capacidades funcionales de los diferentes sistemas RNAV (véase el Anexo A de este volumen). Muchas de las dificultades se pueden superar, sin embargo, si existe una estrecha colaboración entre los diseñadores de procedimientos y las casas que ofrecen el código datos o los proveedores de datos de navegación. Una vez que estos procedimientos han sido validados e inspeccionados en vuelo (ver pasos 4 y 6), hay que publicarlos en el AIP nacional junto con cualquier cambio de rutas, áreas de espera o estructuras del espacio aéreo. La complejidad involucrada en el procesamiento de datos para sistemas de base de datos RNAV significa que en la mayoría de los casos, es necesario llevar el plazo de dos ciclos AIRAC (véase el Volumen I, Anexo B, Sección 3 para más detalles).
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-3-5
Paso 4 Procedimiento de validación de tierra
El desarrollo de procedimientos de vuelo por instrumentos RNAV o RNP o rutas ATS sigue una serie de pasos desde el origen de los datos a través de un levantamiento topográfico y geodésico para finalmente hacer la publicación del procedimiento y la posterior codificación de los mismos para su uso en una base de datos de navegación a bordo (véase el Anexo B de este volumen). En cada paso del proceso de diseño de procedimientos, debería haber un control de calidad en los procedimientos para garantizar que los niveles necesarios de la exactitud y la integridad se alcancen y se mantengan. Estos procedimientos de control de calidad se detallan en los PANS-OPS (Doc. 8168), Volumen II. Después de diseñar el procedimiento, y antes de que se publique una ruta RNAV o RNP o procedimiento, en los PANS-OPS (Doc. 8168) exige que cada uno de los procedimientos sea sometidos a un proceso de validación. El objetivo de la validación es:
a) Ofrecer garantías suficientes que se ha prestado un adecuado franqueamiento de obstáculos;
b) Verificar que los datos de navegación, que se publicarán, al igual que el diseñador de procedimientos que los utilizo son correctos;
c) Verificar que toda la infraestructura necesaria, como las marcas de pista, iluminación, comunicaciones y fuentes navegación, se encuentran en el lugar y;
d) Realizar una evaluación de la capacidad de vuelo para determinar que el procedimiento se puede volar, y
e) Evaluar la cartografía, la infraestructura necesaria, la visibilidad y otros factores operativos.
Muchos de estos factores pueden ser evaluados, en su totalidad o en parte, durante la validación en tierra. El control Inicial de la capacidad de vuelo deberá llevarse a cabo con herramientas de software que permitan la capacidad de vuelo del procedimiento que se ha confirmado para una gama de aviones y en una amplia gama de condiciones (viento y temperatura, etc.) para lo cual está diseñado el procedimiento. La verificación de la capacidad de vuelo de un procedimiento RNAV o RNP puede incluir también la evaluación independiente por diseñadores de procedimientos y otros expertos usando software especializado o un simulador de vuelo completo. Las pruebas de capacidad de vuelo de aeronaves de inspección pueden ser consideradas, pero hay
Parte B Concepto de la Navegación Basada en la Performance Capítulo 3 Planificación e Implementación
l-B-3-6
que tener en cuenta que esto sólo demuestra que la aeronave utilizada para el ensayo puede ejecutar el procedimiento correctamente. Esto es probablemente aceptable para la mayoría de los procedimientos menos complejos. El tamaño y la velocidad de las aeronaves de ensayos en vuelo rara vez puede representar el rendimiento a plena carga de un B747 o A340 y de su simulación, por lo tanto, se considera la forma más adecuada para llevar a cabo la prueba de capacidad de vuelo. El simulador de vuelo debe llevar a cabo pruebas para los procedimientos más complejos, como la RNP AR APCH, cuando hay alguna indicación de que capacidad de vuelo puede ser un problema. Herramientas de software que utilizan datos digitales del terreno (por lo general, se requiere de datos de elevación digital del terreno (DTED) de nivel 1, estos son apropiados para confirmar la adecuada cobertura teórica de ayudas a la navegación.
Paso 5 Decisión de la Implementación
Por lo general en los diferentes procesos de validación que se han descrito anteriormente resulta evidente si el diseño propuesto puede ser implementado. La decisión de proceder o no seguir adelante con la aplicación debe hacerse a un predeterminado punto en el ciclo de vida de un proyecto. Nota.- Si se dispone de herramientas y/o calidad de los datos utilizados en el paso 4, puede ser conveniente llevar a cabo el paso 6 antes de finalizar la ejecución de una decisión. La decisión de si seguir adelante con la aplicación se basa en ciertos factores decisivos. Estos incluyen:
a) Si las rutas ATS / diseño de procedimientos se ajustan al tránsito aéreo y las necesidades de las operaciones de vuelo;
b) Si la seguridad y requisitos de navegación se han cumplido;
c) Necesidades de formación de Pilotos y controladores, y;
d) Si cambia el procesamiento del plan de vuelo, automatización, AIP o publicaciones estas son necesarias para apoyar la aplicación.
Si todos los criterios de ejecución se cumplen, el equipo del proyecto de plan de necesidades para la ejecución de la aplicación, no sólo en lo que respecta a su "propio" espacio aéreo y de la ANSP, pero en cooperación con las partes afectadas que pueden incluir ANSP en un Estado adyacentes.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-3-7
Paso 6 Vuelo de inspección y validación en vuelo
La inspección en vuelo de ayudas a la navegación, el uso de aeronaves de prueba implica las que están especialmente equipadas para medir la real cobertura de la infraestructura de las ayudas a la navegación, necesaria para apoyar los procedimientos, rutas de llegada y de salida, diseñados por el especialista de procedimientos. La validación en vuelo sigue el proceso de la validación del procedimiento que se señala en el Paso 4. Se utiliza para confirmar la validez de los datos de obstrucción del terreno y utilizados para construir el procedimiento, y que la trayectoria definida que toma la aeronave con relación al punto con el objetivo, así como la validación de otros factores que se enumeran en el paso 4. La salida de los procedimientos anteriores podrá exigir que el especialista de diseño de procedimientos perfeccione y mejore el proyecto de procedimientos. El Manual de Pruebas de Radioayudas para la navegación (Doc. 8071) proporciona orientaciones generales sobre el alcance de pruebas e inspecciones que se llevan a cabo para garantizar que los sistemas de radionavegación cumplan los SARPS del Anexo 10 Telecomunicaciones aeronáuticas, Volumen I. PANS-OPS (Doc. 8168), Tomo II, Parte 1, Sección 2, Capítulo 4, garantía de calidad, proporciona una orientación más detallada sobre el procedimiento de validación de vuelo por instrumentos.
Paso 7 Consideraciones ATC y de integración de sistemas
El nuevo concepto del espacio aéreo puede requerir cambios en el sistema ATC de las interfaces y las pantallas para garantizar que los controladores tengan la información necesaria sobre las capacidades de las aeronaves. Consideraciones derivadas de la mezcla de escenarios de equipo se examinan en el Recuadro 7. Tales cambios podrían incluir, por ejemplo:
a) Modificación de la automatización del tránsito aéreo del procesador de datos de vuelo (FDP);
b) Realizar cambios, si es necesario, para el procesador de datos radar (RDP);
c) Requieren cambios en la situación de la pantalla de ATC, y
d) El ATC requieren de cambios en las herramientas de apoyo.
Puede haber una exigencia de cambios en los métodos para la expedición de NOTAMS de la ANSP.
Parte B Concepto de la Navegación Basada en la Performance Capítulo 3 Planificación e Implementación
l-B-3-8
Recuadro 7
Mezcla de ambientes de navegación Un entorno de navegación mixto presenta algunas complejidades de ATS. Desde el punto de vista del volumen de trabajo de ATC y las perspectiva del sistema de automatización, el sistema debe incluir la capacidad de especificaciones diferentes de filtrado de la navegación de plan de vuelo del ATC y la transmisión de la información a los controladores. Para el control del tránsito aéreo, especialmente en el marco de procedimientos de control, las diferentes mínimas de separación y el espaciamiento de ruta que se apliquen como consecuencia directa de la especificación de navegación. Mezcla de ambientes de navegación por lo general se producen en uno de los tres escenarios:
a) Una aplicación RNAV o RNP se ha puesto en práctica (pero no como un mandato), y la navegación convencional se mantiene. Un ejemplo de esto sería si RNAV-1 fue declarada como especificación RNAV de un espacio aéreo terminal, también con la disponibilidad sobre la base de los procedimientos convencionales de navegación, para los aviones no autorizados para RNAV-1. b) Un " mandato mixto " se utiliza dentro de un volumen de espacio aéreo - por lo general en operaciones o procedimientos en ruta oceánica o remota. Por ejemplo, es obligatorio ser autorizada una especificación RNAV-1 para la operación a lo largo de un conjunto de rutas y RNAV-5 a lo largo de otro conjunto de rutas en el mismo espacio aéreo. c) Una mezcla de aplicaciones RNAV o RNP se lleva a cabo en el espacio aéreo, pero no hay mandato para poderlas llevar a cabo por los operadores. La navegación convencional podría ser autorizada para las aeronaves que no están autorizadas para cualquiera de las dos especificaciones de navegación.
Entornos Mixtos de navegación pueden tener un impacto negativo en el trabajo ATC, particularmente en áreas de operación densas en ruta o terminal. La aceptabilidad de un ambiente mixto de navegación para el ATC también depende de la complejidad de las rutas ATS, SID y STAR y estructura de rutas y dependiendo de la disponibilidad y funcionalidad de las herramientas de apoyo del ATC. El aumento de trabajo del ATC normalmente como resultado de las operaciones de modo mixto a veces ha dado lugar a la necesidad de limitar las operaciones de modo mixto con un máximo de dos tipos, donde existe un nivel principal de capacidad. En algunos casos, el ATC sólo ha sido capaz de aceptar un entorno mixto, donde el 90 por ciento del tránsito está aprobado para la especificación de navegación requerida, mientras que en otros casos, una tasa de 70 por ciento ha sido viable. Por estas razones, es fundamental que las operaciones en un entorno mixto de navegación deban evaluarse correctamente para determinar la viabilidad de esas operaciones.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-3-9
Paso 8 La sensibilización y material de Entrenamiento
La introducción de la PBN puede implicar una inversión considerable en términos de formación, educación y material de sensibilización tanto para tripulaciones de vuelo y los controladores. En muchos Estados, los módulos de formación y capacitación basada en computadora han sido eficazmente utilizados para algunos aspectos de la educación y la formación. La OACI proporciona material de formación y seminarios. Cada especificación de navegación en el Volumen II, las partes B y C se refiere a la educación y la formación adecuada para la tripulación de vuelo y los controladores.
Paso 9 Establecer la fecha de ejecución operativa
El Estado establece una fecha de entrada en vigor de conformidad con los requisitos establecidos en el Volumen I, Anexo B, Procesos de Datos. La experiencia ha determinado que un período de tiempo (por ejemplo, de una a dos semanas) debería ser asignadas antes de la fecha de ejecución operativa. Este período adicional es para garantizar que el sistema de tierra y de abordo se ha cargado correctamente los datos y validados en las bases de datos.
Paso 10
Post-revisión de la implementación Después de la implementación de la PBN, el sistema debe ser monitoreado para garantizar que la seguridad del sistema es mantenido y para determinar si los objetivos estratégicos se han logrado. Si después de la implementación, acontecimientos imprevistos se producen, el equipo del proyecto debería poner las medidas de mitigación en el lugar tan pronto como sea posible. En casos de circunstancias excepcionales, esto podría exigir la retirada del RNAV o RNP, mientras que se tratan problemas específicos. Un sistema de evaluación de la seguridad debe llevarse a cabo después de la aplicación y las pruebas recogidas para verificar que la seguridad del sistema está garantizada - ver el Manual de Gestión de Seguridad (SMM) (Doc. 9859).
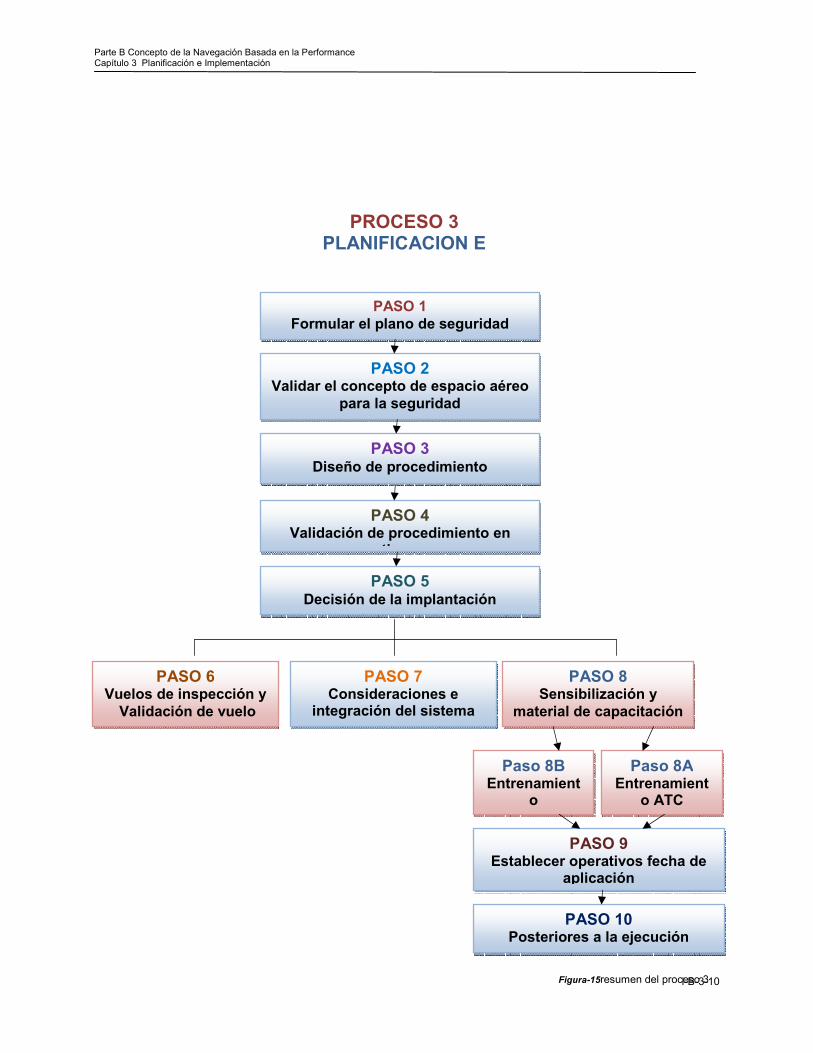
Parte B Concepto de la Navegación Basada en la Performance Capítulo 3 Planificación e Implementación
l-B-3-10
PASO 1 Formular el plano de seguridad
PASO 2 Validar el concepto de espacio aéreo
para la seguridad
PASO 3 Diseño de procedimiento
PASO 4 Validación de procedimiento en
tierra
PASO 5 Decisión de la implantación
PASO 6 Vuelos de inspección y Validación de vuelo
PASO 7 Consideraciones e
integración del sistema ATC
PASO 8 Sensibilización y
material de capacitación
Paso 8A Entrenamient
o ATC
Paso 8B Entrenamient
o tripulaciones
PASO 9 Establecer operativos fecha de
aplicación
PASO 10 Posteriores a la ejecución
revisar
Figura-15resumen del proceso 3
PROCESO 3 PLANIFICACION E IMPLANTACION
I-B-4-1
CAPÍTULO 4
DIRECTRICES PARA EL DESARROLLO DE UN NUEVA ESPECIFICACIÓN DE NAVEGACIÓN
INTRODUCCIÓN
En la mayoría de los casos, será posible utilizar una especificación de navegación de la OACI para satisfacer los requisitos de navegación para un Estado o concepto espacio aéreo de una región prevista. En el raro caso de que un Estado o región no es capaz de completar Proceso 2 y seleccionar las especificaciones de navegación de la OACI, el Estado o la región tendría que desarrollar una nueva especificación de navegación. Con el fin de evitar la proliferación de normas regionales, una nueva especificación de navegación estará sujeta a revisión de OACI y, en definitiva, estará disponible para la aplicación a escala mundial. Las directrices en este capítulo frente a esta situación. El desarrollo de una nueva especificación de navegación que sólo es posible si se convierte en imposible hacer aceptable el equilibrio entre el concepto definido de espacio aéreo y de navegación, los requisitos funcionales que se pueden apoyado por una especificación estándar de la OACI de navegación. Se debe reconocer que el desarrollo de una nueva especificación de navegación supone una evaluación rigurosa de equipos de navegación y su funcionamiento. Esto requerirá una mayor participación de las autoridades de aeronavegabilidad necesarios en el Proceso 2. Si bien una cantidad considerable de los trabajos preparatorios para el desarrollo de un nuevo sistema de especificaciones de navegación que inicialmente se realizarán como parte del Proceso 1 y 2, el Estado o región de que se trate deberá emprender un análisis completo en cada paso. Revisión y modificaciones a la labor realizada en los procesos 1 y 2, también pueden necesitar ser realizado en su totalidad o en parte. PASOS PARA DESARROLLAR UNA NUEVA ESPECIFICACIÓN DE NAVEGACIÓN
Paso 1 Estudio de viabilidad y de negocio
Al desarrollar una nueva especificación de navegación, la cuestión de la viabilidad de establecer un nuevo sistema de navegación o especificación de que puede realmente ser satisfechas por los fabricantes de aeronaves y operadores, y en función de los costos efectivos para la aplicación de la especificación de navegación, es
Parte B Concepto de la Navegación Basada en la Performance Capítulo 4 Directrices para el Desarrollo de una Nueva Especificación de Navegación
l-B-4-2
particularmente importante. Es necesario realizar un estudio de viabilidad, evaluación y desarrollar un negocio. Evaluar el caso de los beneficios de las empresas que se derivarán de la propuesta de espacio aéreo y el costo de la aplicación de una nueva especificación de navegación. La información sobre los costos se deriva de las funciones propuestas incluidas en la nueva especificación de navegación prevista, junto con las estimaciones de los costes de instalación y certificación. Debe entenderse que los plazos de la definición inicial de un nuevo requisito de la disponibilidad en los nuevos sistemas RNAV o los FMS pueden ser en exceso de cinco a siete años. El desarrollo de este punto a uno donde la mayoría de las flotas de aeronaves que operan en un determinado espacio aéreo de forma natural (no el mandato) la mejora del equipo RNAV puede estar en más de 15 años. Por lo tanto, el desarrollo de un nuevo sistema de navegación que normalmente implica el uso de los requisitos funcionales de la especificación de navegación ya previstos por los fabricantes, sin la existencia de la certificación o aprobación operacional. Esbozo de una nueva especificación de navegación El esquema es un producto de la comercialización y el caso ha de tener debidamente en cuenta los requisitos funcionales necesarios para cumplir el espacio aéreo. Tiene que ser producido con suficiente detalle para permitir a los fabricantes de aeronaves para preparar estimaciones de costos y para las mejoras a los sistemas RNAV (incluyendo sistemas RNP).
Paso 2 Desarrollo de una especificación de navegación
Debe contactarse con principios de la OACI en la identificación de la noción de espacio aéreo que se presenta y prevé la necesidad de una nueva especificación de navegación. El papel de la OACI en este proceso será la de ayudar al Estado o la región en un examen detallado de sus necesidades, a fin de garantizar la posterior aceptación mundial de la nueva especificación de navegación. A partir del concepto de espacio aéreo que los desarrolladores han identificado al comienzo de su aplicación PBN, los esfuerzos de implementación, será necesario detallar los requisitos de la aeronave y su operación que en última instancia serán aprobados. En su función de coordinación, la OACI será capaz de identificar otros Estados o regiones que pueden estar en el proceso de desarrollo de un nuevo sistema de navegación con especificaciones similares operativo y/o funciones de navegación. En esta situación, la OACI apoyará el desarrollo multi-Estado o multi-regionales de de una nueva armonización de las especificaciones de navegación. Una vez que la nueva especificación de navegación este completa, y que en última instancia, puedan ser incorporados en el Volumen II de este manual.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-B-4-3
Aunque el concepto de espacio aéreo y las exigencias funcionales de navegación, desarrollado en el Proceso 1 forma a partir de un punto la elaboración de una nueva especificación de navegación, es probable que estos tengan refinamiento iterativo, con el fin de alinearlas con los detalles de la nueva especificación de navegación que ya se está desarrollando.
Paso 3 Identificación y desarrollo de las disposiciones relacionadas con la OACI
El desarrollo de una nueva especificación de navegación podrá exigir el desarrollo de las nuevas disposiciones de la OACI, por ejemplo, procedimientos de diseño (PANS-OPS (Doc. 8168)) o criterios de ATM. Si bien estas tareas se llevan a cabo formalmente por expertos, un Estado (s) o región (es) se espera identificar los cambios a fin de ser introducidas en la nueva especificación de navegación y sus aplicaciones.
Paso 4 Evaluación de la seguridad
De conformidad con las disposiciones incluidas en el anexo 11 - Servicios de tránsito aéreo y los PANS-ATM (Doc. 4444), una completa evaluación de seguridad de la nueva especificación de navegación debe ser completada (véase el Manual de Gestión de Seguridad (SMM) (Doc. 9859). Esta evaluación de la seguridad se lleva a cabo una vez que la nueva especificación de navegación es lo suficientemente madura. Véase el Volumen II, Parte A, Capítulo 2 - Evaluación de Seguridad, para una discusión más detallada de los elementos necesarios de evaluación de la seguridad y el riesgo de modelos.
Paso 5 Seguimiento
Cuando el análisis lleva a la conclusión de que la nueva propuesta de especificación de navegación puede ser aplicada en el medio ATM, el Estado o la región tendrán la obligación de notificar oficialmente a la OACI de la aplicación propuesta. La OACI toma medidas para incluir la nueva especificación de navegación en el Volumen II de este manual. Al término de desarrollo de la nueva especificación de navegación, el Estado o región luego continúa con Proceso 3: Planificación y aplicación.

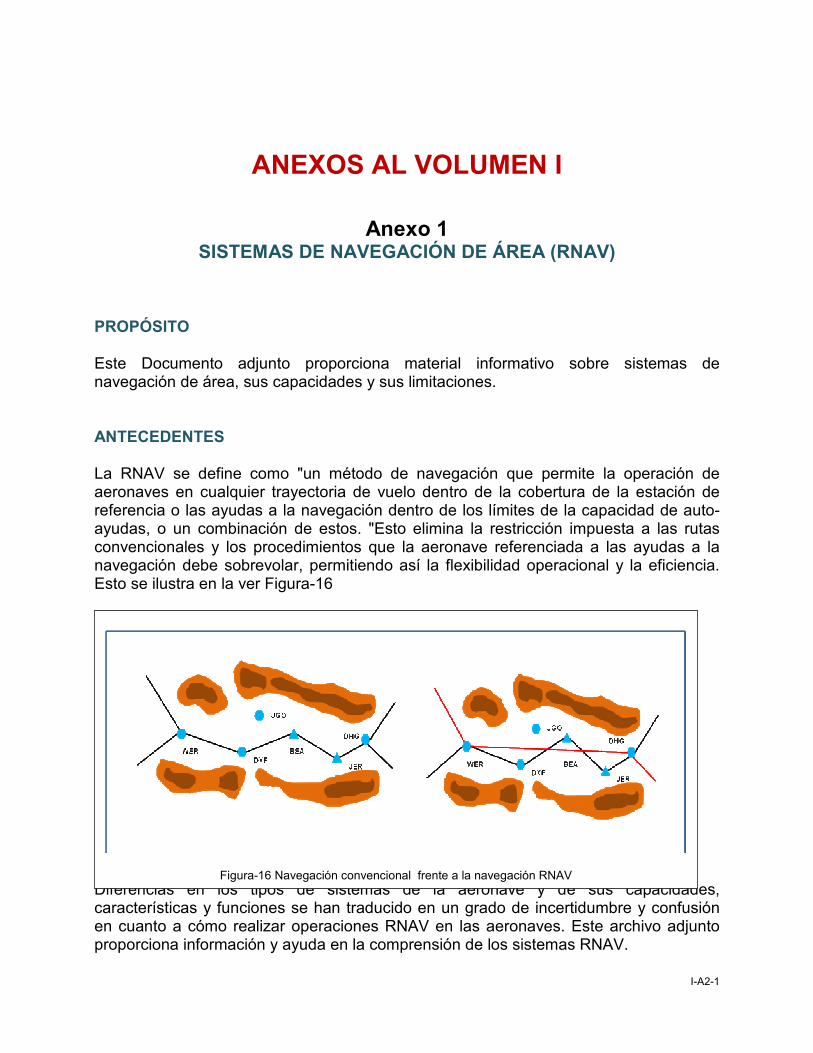
I-A2-1
ANEXOS AL VOLUMEN I
Anexo 1 SISTEMAS DE NAVEGACIÓN DE ÁREA (RNAV)
PROPÓSITO Este Documento adjunto proporciona material informativo sobre sistemas de navegación de área, sus capacidades y sus limitaciones.
ANTECEDENTES La RNAV se define como "un método de navegación que permite la operación de aeronaves en cualquier trayectoria de vuelo dentro de la cobertura de la estación de referencia o las ayudas a la navegación dentro de los límites de la capacidad de auto-ayudas, o un combinación de estos. "Esto elimina la restricción impuesta a las rutas convencionales y los procedimientos que la aeronave referenciada a las ayudas a la navegación debe sobrevolar, permitiendo así la flexibilidad operacional y la eficiencia. Esto se ilustra en la ver Figura-16
Diferencias en los tipos de sistemas de la aeronave y de sus capacidades, características y funciones se han traducido en un grado de incertidumbre y confusión en cuanto a cómo realizar operaciones RNAV en las aeronaves. Este archivo adjunto proporciona información y ayuda en la comprensión de los sistemas RNAV.
Figura-16 Navegación convencional frente a la navegación RNAV
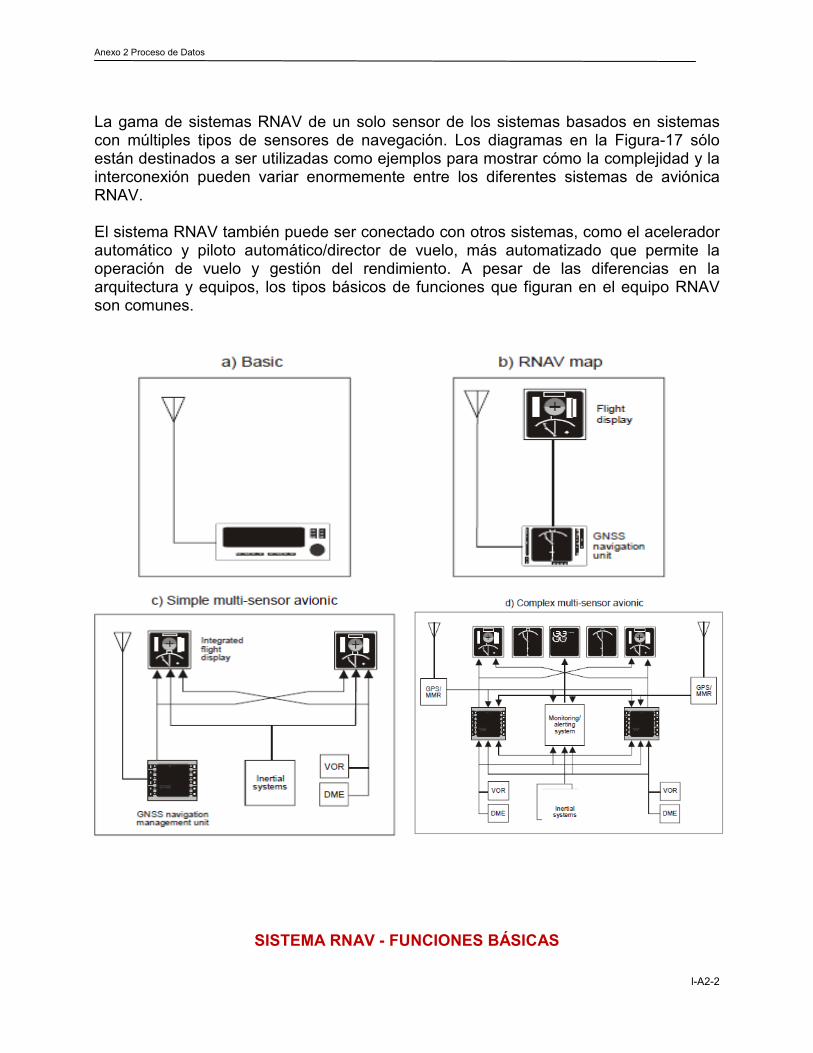
Anexo 2 Proceso de Datos
l-A2-2
La gama de sistemas RNAV de un solo sensor de los sistemas basados en sistemas con múltiples tipos de sensores de navegación. Los diagramas en la Figura-17 sólo están destinados a ser utilizadas como ejemplos para mostrar cómo la complejidad y la interconexión pueden variar enormemente entre los diferentes sistemas de aviónica RNAV. El sistema RNAV también puede ser conectado con otros sistemas, como el acelerador automático y piloto automático/director de vuelo, más automatizado que permite la operación de vuelo y gestión del rendimiento. A pesar de las diferencias en la arquitectura y equipos, los tipos básicos de funciones que figuran en el equipo RNAV son comunes.
Figura-17 Sistemas RNAV – Desde los básicos a los más complejos
SISTEMA RNAV - FUNCIONES BÁSICAS
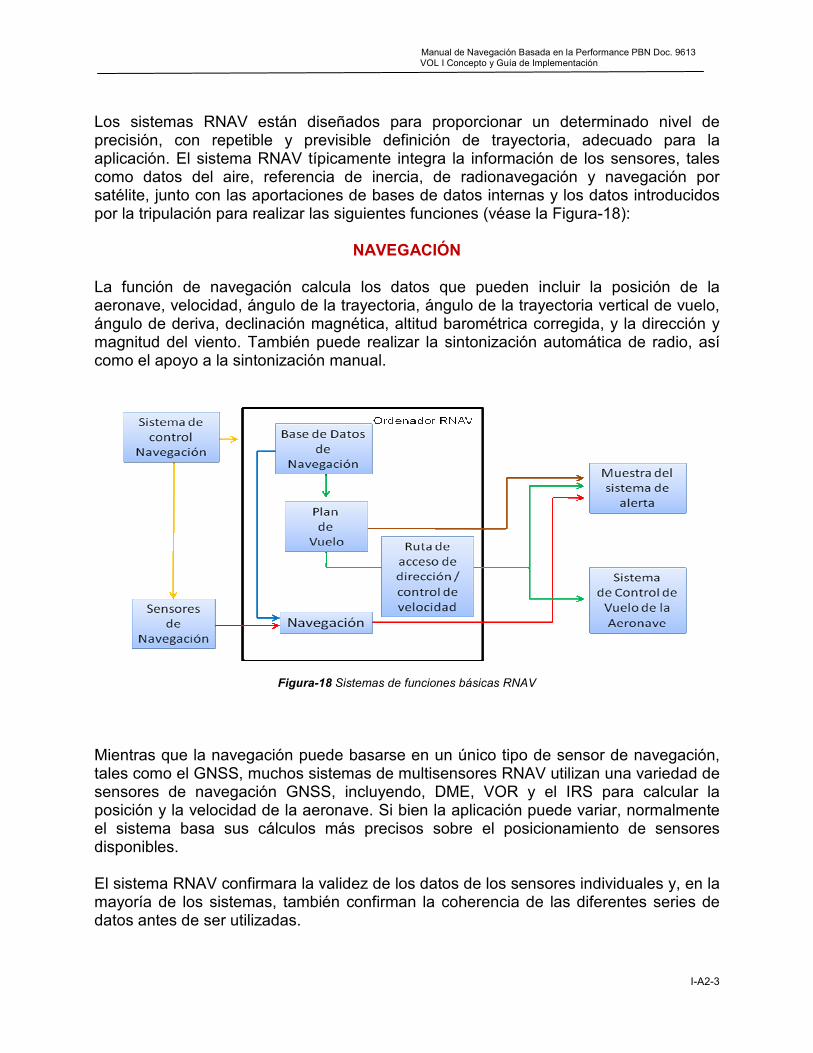
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A2-3
Los sistemas RNAV están diseñados para proporcionar un determinado nivel de precisión, con repetible y previsible definición de trayectoria, adecuado para la aplicación. El sistema RNAV típicamente integra la información de los sensores, tales como datos del aire, referencia de inercia, de radionavegación y navegación por satélite, junto con las aportaciones de bases de datos internas y los datos introducidos por la tripulación para realizar las siguientes funciones (véase la Figura-18):
NAVEGACIÓN La función de navegación calcula los datos que pueden incluir la posición de la aeronave, velocidad, ángulo de la trayectoria, ángulo de la trayectoria vertical de vuelo, ángulo de deriva, declinación magnética, altitud barométrica corregida, y la dirección y magnitud del viento. También puede realizar la sintonización automática de radio, así como el apoyo a la sintonización manual.
Mientras que la navegación puede basarse en un único tipo de sensor de navegación, tales como el GNSS, muchos sistemas de multisensores RNAV utilizan una variedad de sensores de navegación GNSS, incluyendo, DME, VOR y el IRS para calcular la posición y la velocidad de la aeronave. Si bien la aplicación puede variar, normalmente el sistema basa sus cálculos más precisos sobre el posicionamiento de sensores disponibles. El sistema RNAV confirmara la validez de los datos de los sensores individuales y, en la mayoría de los sistemas, también confirman la coherencia de las diferentes series de datos antes de ser utilizadas.
Figura-18 Sistemas de funciones básicas RNAV
Anexo 2 Proceso de Datos
l-A2-4
- La navegación;
- Gestión de los planes de vuelo;
- Dirección y control;
- Visualización y el control de sistemas.
Los datos GNSS suelen ser sometidos a una rigurosa integridad y controles de precisión antes de ser aceptados para el cálculo de la velocidad y la posición de navegación. Los datos VOR-DME normalmente están sujetos a una serie de controles "razonables" antes de ser aceptados para la actualización del FMC. Esta diferencia en rigor se debe a las capacidades y características diseñadas en la tecnología de sensores de navegación y equipo. Para sensores múltiples de sistemas RNAV, si el GNSS no está disponible para el cálculo de posición/velocidad, entonces el sistema selecciona automáticamente uno de baja prioridad, como el modo de actualización DME/DME o VOR-DME. Si estos modos de actualización de radio no existen o han sido deseleccionados y, a continuación, el sistema puede automáticamente revertir al sistema inercial. Para sistemas de un solo sensor, si el sensor falla puede conducir a un funcionamiento de modo de estimación (Dead Reckoning) derrota a estima. Como el avión avanza a lo largo de su trayectoria de vuelo, si el sistema RNAV está utilizando ayudas a la navegación emplazadas en tierra, utiliza su actual estimación de la posición de la aeronave y su base de datos interna para ajustar automáticamente las estaciones en tierra, con el fin de obtener la posición más exacta. La guía lateral y vertical se pone a disposición del piloto, ya sea en la propia pantalla del sistema RNAV o suministrada y mostrada en otros instrumentos. En muchos casos, la guía también se suministra a un sistema de guiado de vuelo automático. En su forma más avanzada, este indicador consiste en un mapa electrónico con el símbolo de una aeronave, la trayectoria de vuelo prevista, y en tierra instalaciones de interés, como ayudas a la navegación y aeropuertos. Bases de Datos de Navegación El sistema RNAV está previsto para acceder a una base de datos de navegación, si está disponible. La base de datos contiene información pre almacenada con ubicación de ayudas a la navegación, puntos de recorrido, rutas ATS y los procedimientos terminales, e información relacionada. El sistema RNAV utilizará dicha información para la planificación de los vuelos y también pueden realizar comprobaciones cruzadas entre los sensores y la información de la base de datos. La planificación de los vuelos La función de planificación de vuelo crea y reúne el plan de vuelo lateral y vertical utilizado por la función dirección. Un aspecto clave del plan de vuelo es la
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A2-5
especificación del plan de vuelo utilizando puntos de referencia de latitud y longitud, sin la referencia de ubicación de cualquier ayuda a la navegación en tierra. Los sistemas RNAV más avanzados incluyen una capacidad de gestión del performance aerodinámico y modelos de propulsión donde son utilizados para calcular los perfiles de vuelo vertical combinando los equipos y capaz de satisfacer las limitaciones impuestas por el control del tránsito aéreo. Una función de gestión del performance puede ser compleja, utilizando el flujo de combustible, el combustible total, posición del los flaps, datos y límites de los motores, altitud, velocidad aerodinámica, velocidad Mach, temperatura, velocidad vertical, y el progreso a lo largo del plan de vuelo y las entradas del piloto. Los sistemas RNAV proporcionan habitualmente información de progreso de vuelo para los puntos de recorrido en ruta, terminal y procedimientos de aproximación, el origen y el destino. La información incluye la hora estimada de llegada, y la distancia a recorrer, útiles en la planificación táctica y la coordinación con el ATC. Dirección y control El RNAV prevé un sistema de guiado lateral y, en muchos casos, así como la orientación vertical. La función de guiado lateral compara la posición de la aeronave generados por la función de navegación con la trayectoria lateral de vuelo y, a continuación, genera comandos de dirección usado para volar la aeronave a lo largo de la ruta deseada. La trayectoria geodésica o de círculo máximo que une puntos de referencia del plan de vuelo, generalmente conocido como "los tramos", y arcos circulares de transición entre estos tramos son calculados por el Sistema RNAV. El error de trayectoria de vuelo se calcula comparando la situación actual de la aeronave y la dirección de la ruta de referencia. Los comandos de dirección para realizar un seguimiento de la trayectoria de referencia se basan en el error de trayectoria. Estos comandos de dirección salen a un sistema de guiado de vuelo, que los controles de la aeronave directamente generan por los comandos del director de vuelo. La función de orientación vertical, si se incluye, se utiliza para controlar la aeronave a lo largo del perfil vertical dentro de las limitaciones impuestas por el plan de vuelo. Las salidas de la función de orientación vertical suelen afinar los comandos del pitch a una pantalla y/o sistema de guiado de vuelo, y los comandos de empuje o de velocidad van a la pantalla y/o una función de empuje automático. Sistemas de control y Pantalla Pantallas y sistemas de control proporcionan los medios para la inicialización del sistema, la planificación de los vuelos, las desviaciones de trayectoria, el monitoreo del progreso, control activo de orientación y presentación de los datos de navegación de la tripulación de vuelo, conocimiento de la situación.
Anexo 2 Proceso de Datos
l-A2-6
SISTEMA RNP - FUNCIONES BÁSICAS
Un sistema RNP es un sistema RNAV cuyas funcionalidades del sistema soportan monitoreo y alerta de la performance de abordo. Los actuales requisitos específicos incluyen:
� Capacidad para seguir una trayectoria deseada con la fiabilidad, repetibilidad y la previsibilidad, incluyendo trayectorias curvas; y
� Donde se incluyen los perfiles verticales de orientación vertical, el uso de ángulos verticales o limitaciones especificadas de altitud para definir una trayectoria vertical deseada.
La supervisión del performance y las capacidades de alerta pueden ser establecidas en diferentes formas dependiendo de la instalación del sistema, la arquitectura y las configuraciones, incluyendo:
� La indicación en la pantalla de la estimación del rendimiento del sistema de navegación;
� Monitoreo del rendimiento del sistema y alertar a la tripulación de la RNP, cuando no se cumplen los requisitos, y
� Desviación perpendicular a la derrota mostrada a escala para la RNP, por separado, en relación con el seguimiento y la alerta para la integridad de la navegación.
Un sistema RNP utiliza sensores de navegación, arquitectura de sistemas y modos de operación para satisfacer la especificación RNP de los requisitos de navegación. Se llevará a cabo los controles de integridad y razonabilidad de los sensores y datos, y puede proporcionar un medio para anular la selección de determinados tipos de ayudas a la navegación para evitar una reversión a la insuficiencia del sensor. Los requisitos de la RNP pueden limitar los modos de operación de la aeronave, por ejemplo, de bajos RNP, donde el error técnico de vuelo (FTE) es un factor importante, en el manual de vuelo de la tripulación no puede estar permitido. Sistema doble de instalaciones de sensores también puede ser necesario dependiendo de la operación o la necesidad.
FUNCIONES ESPECÍFICAS DEL RNAV y RNP
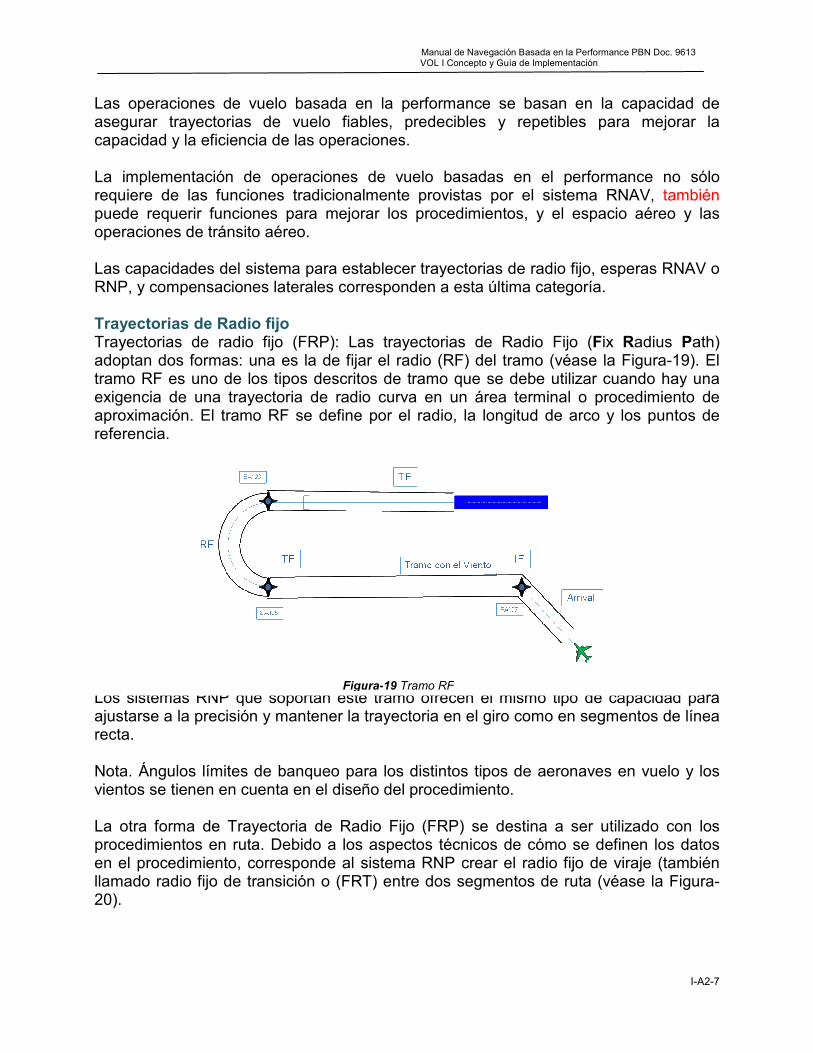
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A2-7
Las operaciones de vuelo basada en la performance se basan en la capacidad de asegurar trayectorias de vuelo fiables, predecibles y repetibles para mejorar la capacidad y la eficiencia de las operaciones. La implementación de operaciones de vuelo basadas en el performance no sólo requiere de las funciones tradicionalmente provistas por el sistema RNAV, también puede requerir funciones para mejorar los procedimientos, y el espacio aéreo y las operaciones de tránsito aéreo. Las capacidades del sistema para establecer trayectorias de radio fijo, esperas RNAV o RNP, y compensaciones laterales corresponden a esta última categoría. Trayectorias de Radio fijo Trayectorias de radio fijo (FRP): Las trayectorias de Radio Fijo (Fix Radius Path) adoptan dos formas: una es la de fijar el radio (RF) del tramo (véase la Figura-19). El tramo RF es uno de los tipos descritos de tramo que se debe utilizar cuando hay una exigencia de una trayectoria de radio curva en un área terminal o procedimiento de aproximación. El tramo RF se define por el radio, la longitud de arco y los puntos de referencia.
Los sistemas RNP que soportan este tramo ofrecen el mismo tipo de capacidad para ajustarse a la precisión y mantener la trayectoria en el giro como en segmentos de línea recta. Nota. Ángulos límites de banqueo para los distintos tipos de aeronaves en vuelo y los vientos se tienen en cuenta en el diseño del procedimiento.
La otra forma de Trayectoria de Radio Fijo (FRP) se destina a ser utilizado con los procedimientos en ruta. Debido a los aspectos técnicos de cómo se definen los datos en el procedimiento, corresponde al sistema RNP crear el radio fijo de viraje (también llamado radio fijo de transición o (FRT) entre dos segmentos de ruta (véase la Figura-20).
Figura-19 Tramo RF
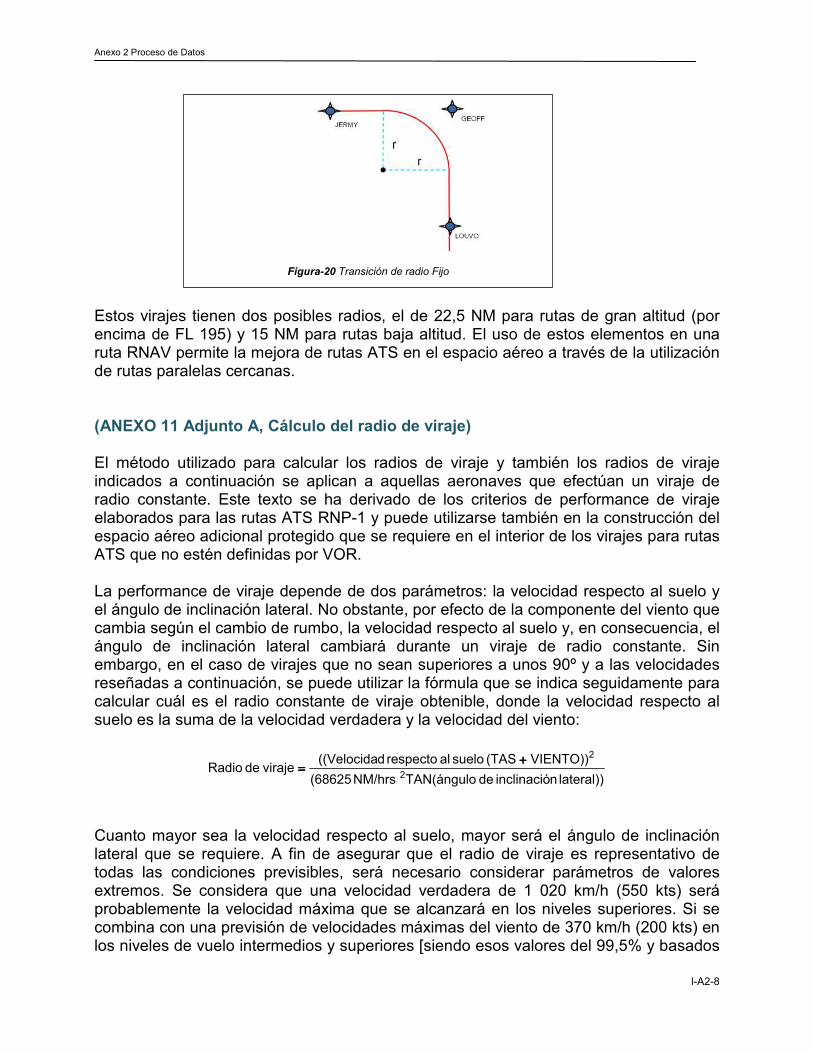
Anexo 2 Proceso de Datos
l-A2-8
Estos virajes tienen dos posibles radios, el de 22,5 NM para rutas de gran altitud (por encima de FL 195) y 15 NM para rutas baja altitud. El uso de estos elementos en una ruta RNAV permite la mejora de rutas ATS en el espacio aéreo a través de la utilización de rutas paralelas cercanas. (ANEXO 11 Adjunto A, Cálculo del radio de viraje) El método utilizado para calcular los radios de viraje y también los radios de viraje indicados a continuación se aplican a aquellas aeronaves que efectúan un viraje de radio constante. Este texto se ha derivado de los criterios de performance de viraje elaborados para las rutas ATS RNP-1 y puede utilizarse también en la construcción del espacio aéreo adicional protegido que se requiere en el interior de los virajes para rutas ATS que no estén definidas por VOR. La performance de viraje depende de dos parámetros: la velocidad respecto al suelo y el ángulo de inclinación lateral. No obstante, por efecto de la componente del viento que cambia según el cambio de rumbo, la velocidad respecto al suelo y, en consecuencia, el ángulo de inclinación lateral cambiará durante un viraje de radio constante. Sin embargo, en el caso de virajes que no sean superiores a unos 90º y a las velocidades reseñadas a continuación, se puede utilizar la fórmula que se indica seguidamente para calcular cuál es el radio constante de viraje obtenible, donde la velocidad respecto al suelo es la suma de la velocidad verdadera y la velocidad del viento:
lateral)) ninclinació de TAN(ángulo NM/hrs (68625
VIENTO))(TAS suelo al respecto d((Velocidaviraje de Radio
2
2++++
====
Cuanto mayor sea la velocidad respecto al suelo, mayor será el ángulo de inclinación lateral que se requiere. A fin de asegurar que el radio de viraje es representativo de todas las condiciones previsibles, será necesario considerar parámetros de valores extremos. Se considera que una velocidad verdadera de 1 020 km/h (550 kts) será probablemente la velocidad máxima que se alcanzará en los niveles superiores. Si se combina con una previsión de velocidades máximas del viento de 370 km/h (200 kts) en los niveles de vuelo intermedios y superiores [siendo esos valores del 99,5% y basados
Figura-20 Transición de radio Fijo
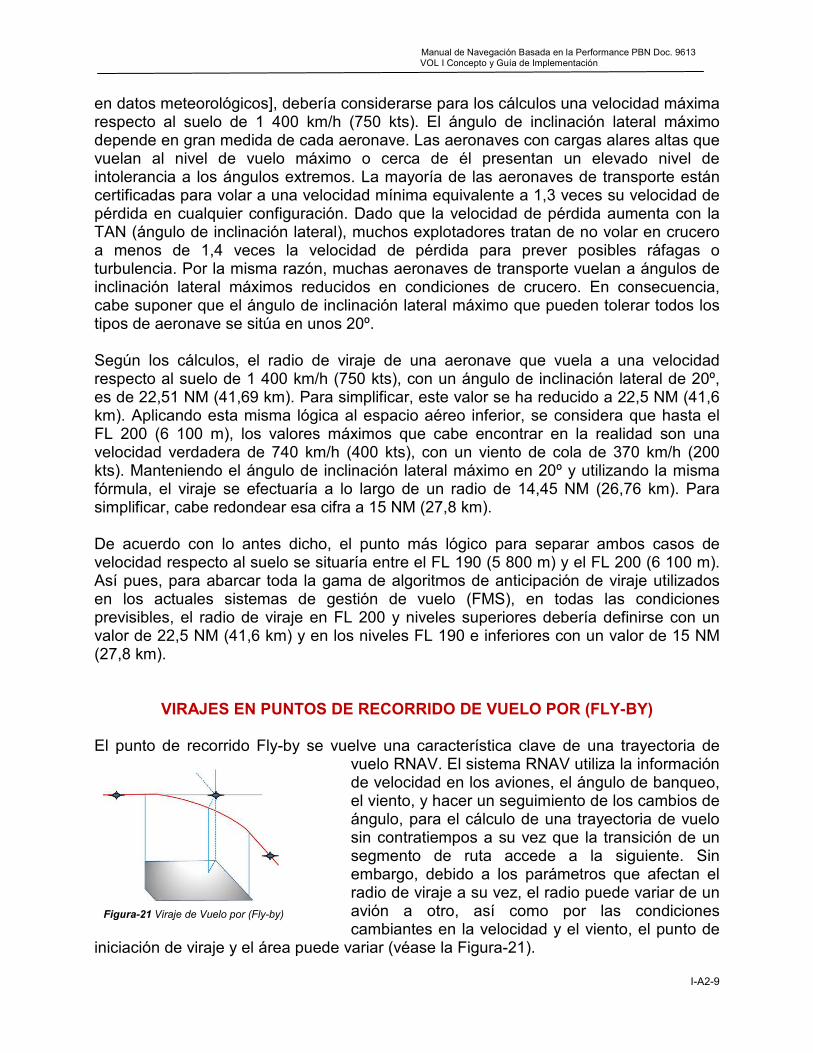
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A2-9
en datos meteorológicos], debería considerarse para los cálculos una velocidad máxima respecto al suelo de 1 400 km/h (750 kts). El ángulo de inclinación lateral máximo depende en gran medida de cada aeronave. Las aeronaves con cargas alares altas que vuelan al nivel de vuelo máximo o cerca de él presentan un elevado nivel de intolerancia a los ángulos extremos. La mayoría de las aeronaves de transporte están certificadas para volar a una velocidad mínima equivalente a 1,3 veces su velocidad de pérdida en cualquier configuración. Dado que la velocidad de pérdida aumenta con la TAN (ángulo de inclinación lateral), muchos explotadores tratan de no volar en crucero a menos de 1,4 veces la velocidad de pérdida para prever posibles ráfagas o turbulencia. Por la misma razón, muchas aeronaves de transporte vuelan a ángulos de inclinación lateral máximos reducidos en condiciones de crucero. En consecuencia, cabe suponer que el ángulo de inclinación lateral máximo que pueden tolerar todos los tipos de aeronave se sitúa en unos 20º. Según los cálculos, el radio de viraje de una aeronave que vuela a una velocidad respecto al suelo de 1 400 km/h (750 kts), con un ángulo de inclinación lateral de 20º, es de 22,51 NM (41,69 km). Para simplificar, este valor se ha reducido a 22,5 NM (41,6 km). Aplicando esta misma lógica al espacio aéreo inferior, se considera que hasta el FL 200 (6 100 m), los valores máximos que cabe encontrar en la realidad son una velocidad verdadera de 740 km/h (400 kts), con un viento de cola de 370 km/h (200 kts). Manteniendo el ángulo de inclinación lateral máximo en 20º y utilizando la misma fórmula, el viraje se efectuaría a lo largo de un radio de 14,45 NM (26,76 km). Para simplificar, cabe redondear esa cifra a 15 NM (27,8 km). De acuerdo con lo antes dicho, el punto más lógico para separar ambos casos de velocidad respecto al suelo se situaría entre el FL 190 (5 800 m) y el FL 200 (6 100 m). Así pues, para abarcar toda la gama de algoritmos de anticipación de viraje utilizados en los actuales sistemas de gestión de vuelo (FMS), en todas las condiciones previsibles, el radio de viraje en FL 200 y niveles superiores debería definirse con un valor de 22,5 NM (41,6 km) y en los niveles FL 190 e inferiores con un valor de 15 NM (27,8 km).
VIRAJES EN PUNTOS DE RECORRIDO DE VUELO POR (FLY-BY) El punto de recorrido Fly-by se vuelve una característica clave de una trayectoria de
vuelo RNAV. El sistema RNAV utiliza la información de velocidad en los aviones, el ángulo de banqueo, el viento, y hacer un seguimiento de los cambios de ángulo, para el cálculo de una trayectoria de vuelo sin contratiempos a su vez que la transición de un segmento de ruta accede a la siguiente. Sin embargo, debido a los parámetros que afectan el radio de viraje a su vez, el radio puede variar de un avión a otro, así como por las condiciones cambiantes en la velocidad y el viento, el punto de
iniciación de viraje y el área puede variar (véase la Figura-21).
Figura-21 Viraje de Vuelo por (Fly-by)
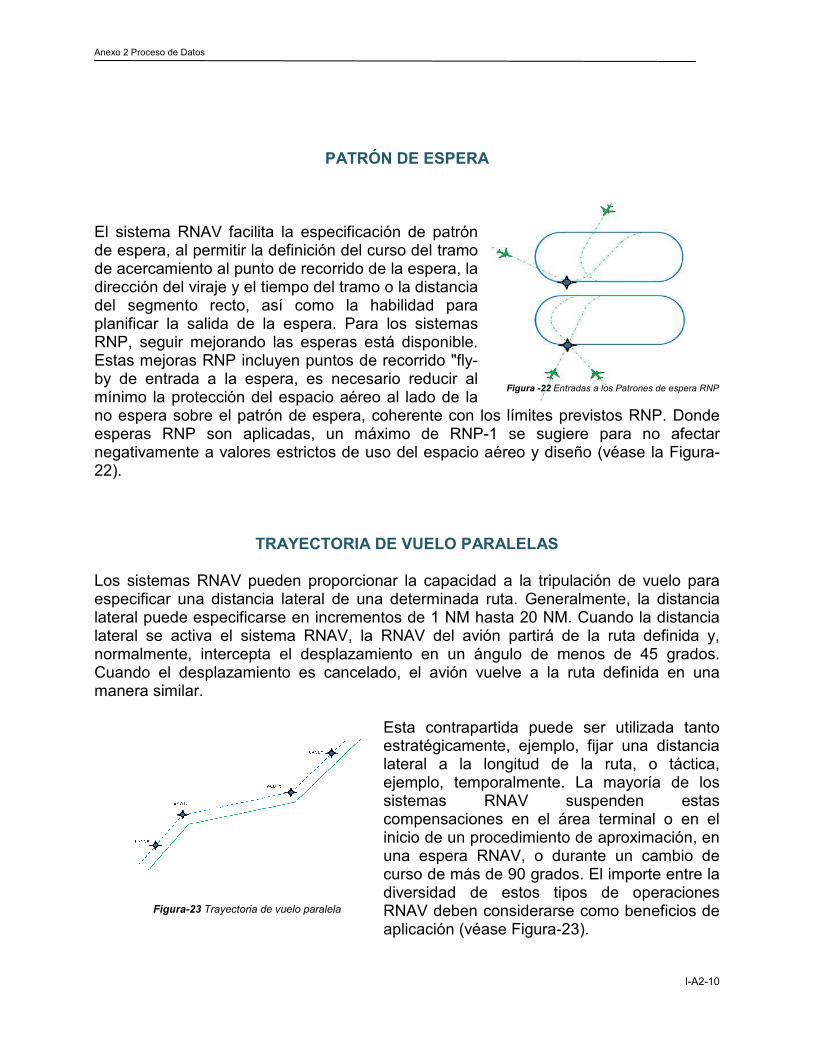
Anexo 2 Proceso de Datos
l-A2-10
Figura-23 Trayectoria de vuelo paralela
PATRÓN DE ESPERA
El sistema RNAV facilita la especificación de patrón de espera, al permitir la definición del curso del tramo de acercamiento al punto de recorrido de la espera, la dirección del viraje y el tiempo del tramo o la distancia del segmento recto, así como la habilidad para planificar la salida de la espera. Para los sistemas RNP, seguir mejorando las esperas está disponible. Estas mejoras RNP incluyen puntos de recorrido "fly-by de entrada a la espera, es necesario reducir al mínimo la protección del espacio aéreo al lado de la no espera sobre el patrón de espera, coherente con los límites previstos RNP. Donde esperas RNP son aplicadas, un máximo de RNP-1 se sugiere para no afectar negativamente a valores estrictos de uso del espacio aéreo y diseño (véase la Figura-22).
TRAYECTORIA DE VUELO PARALELAS Los sistemas RNAV pueden proporcionar la capacidad a la tripulación de vuelo para especificar una distancia lateral de una determinada ruta. Generalmente, la distancia lateral puede especificarse en incrementos de 1 NM hasta 20 NM. Cuando la distancia lateral se activa el sistema RNAV, la RNAV del avión partirá de la ruta definida y, normalmente, intercepta el desplazamiento en un ángulo de menos de 45 grados. Cuando el desplazamiento es cancelado, el avión vuelve a la ruta definida en una manera similar.
Esta contrapartida puede ser utilizada tanto estratégicamente, ejemplo, fijar una distancia lateral a la longitud de la ruta, o táctica, ejemplo, temporalmente. La mayoría de los sistemas RNAV suspenden estas compensaciones en el área terminal o en el inicio de un procedimiento de aproximación, en una espera RNAV, o durante un cambio de curso de más de 90 grados. El importe entre la diversidad de estos tipos de operaciones RNAV deben considerarse como beneficios de aplicación (véase Figura-23).
Figura -22 Entradas a los Patrones de espera RNP
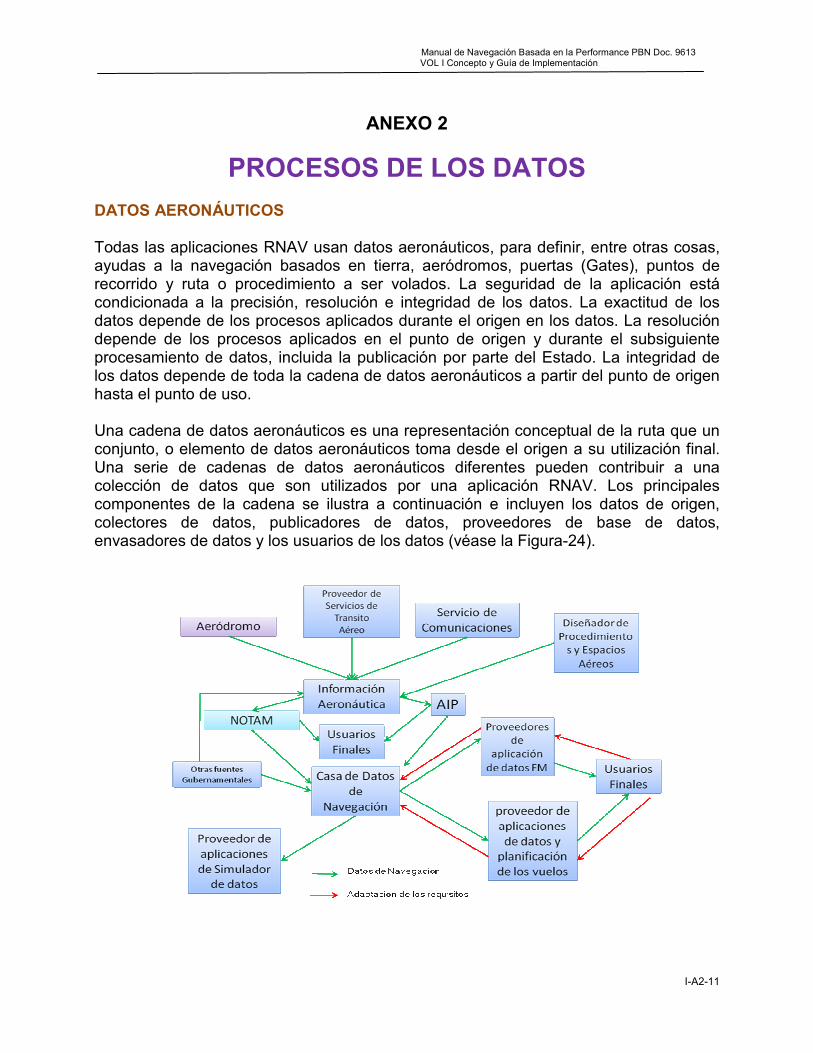
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A2-11
ANEXO 2
PROCESOS DE LOS DATOS
DATOS AERONÁUTICOS Todas las aplicaciones RNAV usan datos aeronáuticos, para definir, entre otras cosas, ayudas a la navegación basados en tierra, aeródromos, puertas (Gates), puntos de recorrido y ruta o procedimiento a ser volados. La seguridad de la aplicación está condicionada a la precisión, resolución e integridad de los datos. La exactitud de los datos depende de los procesos aplicados durante el origen en los datos. La resolución depende de los procesos aplicados en el punto de origen y durante el subsiguiente procesamiento de datos, incluida la publicación por parte del Estado. La integridad de los datos depende de toda la cadena de datos aeronáuticos a partir del punto de origen hasta el punto de uso. Una cadena de datos aeronáuticos es una representación conceptual de la ruta que un conjunto, o elemento de datos aeronáuticos toma desde el origen a su utilización final. Una serie de cadenas de datos aeronáuticos diferentes pueden contribuir a una colección de datos que son utilizados por una aplicación RNAV. Los principales componentes de la cadena se ilustra a continuación e incluyen los datos de origen, colectores de datos, publicadores de datos, proveedores de base de datos, envasadores de datos y los usuarios de los datos (véase la Figura-24).
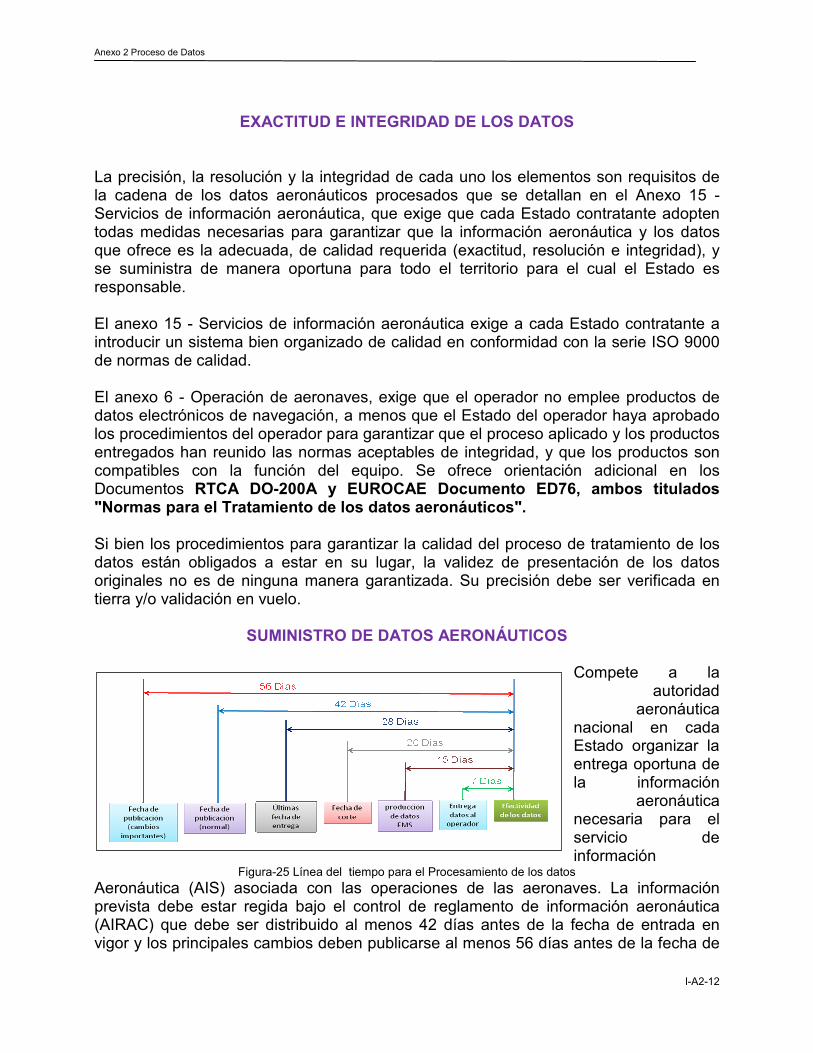
Anexo 2 Proceso de Datos
l-A2-12
EXACTITUD E INTEGRIDAD DE LOS DATOS
La precisión, la resolución y la integridad de cada uno los elementos son requisitos de la cadena de los datos aeronáuticos procesados que se detallan en el Anexo 15 - Servicios de información aeronáutica, que exige que cada Estado contratante adopten todas medidas necesarias para garantizar que la información aeronáutica y los datos que ofrece es la adecuada, de calidad requerida (exactitud, resolución e integridad), y se suministra de manera oportuna para todo el territorio para el cual el Estado es responsable. El anexo 15 - Servicios de información aeronáutica exige a cada Estado contratante a introducir un sistema bien organizado de calidad en conformidad con la serie ISO 9000 de normas de calidad. El anexo 6 - Operación de aeronaves, exige que el operador no emplee productos de datos electrónicos de navegación, a menos que el Estado del operador haya aprobado los procedimientos del operador para garantizar que el proceso aplicado y los productos entregados han reunido las normas aceptables de integridad, y que los productos son compatibles con la función del equipo. Se ofrece orientación adicional en los Documentos RTCA DO-200A y EUROCAE Documento ED76, ambos titulados "Normas para el Tratamiento de los datos aeronáuticos". Si bien los procedimientos para garantizar la calidad del proceso de tratamiento de los datos están obligados a estar en su lugar, la validez de presentación de los datos originales no es de ninguna manera garantizada. Su precisión debe ser verificada en tierra y/o validación en vuelo.
SUMINISTRO DE DATOS AERONÁUTICOS
Compete a la autoridad
aeronáutica nacional en cada Estado organizar la entrega oportuna de la información
aeronáutica necesaria para el servicio de información
Figura-25 Línea del tiempo para el Procesamiento de los datos
Aeronáutica (AIS) asociada con las operaciones de las aeronaves. La información prevista debe estar regida bajo el control de reglamento de información aeronáutica (AIRAC) que debe ser distribuido al menos 42 días antes de la fecha de entrada en vigor y los principales cambios deben publicarse al menos 56 días antes de la fecha de
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL I Concepto y Guía de Implementación
I-A2-13
entrada en vigor.El ciclo de procesamiento de bases de datos de navegación a bordo requiere que las bases de datos sean entregadas al usuario final por lo menos siete días antes de la fecha de entrada en vigor. El proveedor del sistema RNAV requiere un mínimo de ocho días para el empaquetado de datos antes de la entrega al usuario final, y las casas de datos de navegación generalmente ejecutan un corte de 20 días antes de la fecha efectiva, a fin de asegurar que las etapas subsiguientes se cumplan. Los datos suministrados después de los 20 días de corte por lo general no se incluirán en la base de datos para el próximo ciclo. El calendario se ilustra en la Figura-25. La calidad de los datos obtenidos de otro eslabón de la cadena de datos aeronáuticos deben ser validados con el nivel requerido o garantizados mediante una garantía de la calidad de los datos del proveedor. En la mayoría de los casos, no hay punto de referencia contra el cual la calidad de estos datos pueden ser validados y la necesidad de obtener garantías de la calidad de los datos por lo general, el flujo a través del sistema hasta que llega el originador de cada elemento de dato. En consecuencia, la dependencia debe utilizar procedimientos apropiados en cada punto a lo largo de la cadena de los datos aeronáuticos. Los datos de navegación podrán ser originados de inspecciones o levantamientos, desde las especificaciones o ajustes de los equipos o desde el espacio aéreo y proceso de diseño de procedimientos. Sea cual sea la fuente, la generación y el tratamiento posterior de los datos debe tener en cuenta lo siguiente:
a) Todos los datos de coordenadas debe estar referenciadas con el Sistema Geodésico Mundial - 1984 (WGS-84);
b) todos los levantamientos geodésicos deben basarse en el marco de referencia terrestre internacional (ITRF);
i. Nota: en Colombia MAGNA-SIRGAS.
c) todos los datos debe ser conforme a su origen;
d) Los equipos usados para los levantamientos deberán estar calibrados adecuadamente;
e) Las herramientas de software utilizadas para los levantamientos, el diseño de procedimientos o de espacio aéreo debe ser adecuadamente cualificado;
f) Los criterios y algoritmos uniformes deben ser utilizados en todos los diseños;
g) Los inspectores y los diseñadores deben estar debidamente capacitados;
h) Las rutinas de verificación y validación global deben ser utilizados por todos los generadores de datos;
i) Los procedimientos deben ser sometidos a una validación en tierra, donde necesariamente una validación en vuelo e inspección en vuelo antes de su publicación;
j) Los datos de navegación aeronáuticos, deben ser publicados en un formato estándar, con un nivel adecuado de detalle y resolución requerida, y

Anexo 2 Proceso de Datos
l-A2-14
k) Todos los generadores y procesadores de datos deben implementar un proceso de gestión de la calidad que incluye:
I. La obligación de mantener registros de calidad;
II. un procedimiento de gestión de información y presentación de informes de error de los usuarios y otros procesadores en la cadena de los datos.
MODIFICACIÓN DE LOS DATOS AERONÁUTICOS Un procesador de datos o usuario de datos se compromete a no modificar los datos sin informar de la modificación al generador de los datos y la recepción de la concurrencia. Los datos alterados no se transmitirán a un usuario si el generador rechaza la modificación. Deberá llevarse un registro de todas las modificaciones y se harán disponibles a pedido. Siempre que sea posible, los procesos de manejo de datos debe ser automatizado y la intervención humana debe mantenerse a un mínimo. Deben utilizarse los dispositivos de Integridad como los algoritmos de control de redundancia cíclica (CRC), cuando sea posible en toda la cadena de datos de navegación. Nota: La comprobación de redundancia cíclica (CRC) es un tipo de función que recibe un flujo de datos de cualquier longitud como entrada y devuelve un valor de longitud fija como salida. El término suele ser usado para designar tanto a la función como a su resultado. Pueden ser usadas como suma de verificación para detectar la alteración de datos durante su transmisión o almacenamiento. Las CRCs son populares porque su implementación en hardware binario es simple, son fáciles de analizar matemáticamente y son particularmente efectivas para detectar errores ocasionados por ruido en los canales de transmisión.

II-(i)
TABLA DE CONTENIDO
PARTE A - GENERALIDADES Capítulo 1. Introducción Concepto PBN revisión Uso y el alcance de las especificaciones de navegación Capítulo 2. Monitoreo de la performance y alerta a bordo Introducción Error de navegación y componentes de alerta Navegación lateral Navegación longitudinal Papel del monitoreo de la performance y alerta abordo Capítulo 3. Evaluación de la seguridad de sus consideraciones Introducción Rendimientos de aviones Los fallos de los sistemas Infraestructura
Fallas de ayudas a la navegación (ayudas a la navegación) Ambiente Vigilancia ATS y comunicación
PARTE B - APLICACIÓN RNAV Capítulo 1. La aplicación de RNAV-10 (designados y autorizados como RNP-10) Introducción Antecedentes Finalidad Consideraciones ANSP Infraestructura de ayudas a la navegación Vigilancia ATS y Comunicación Franqueamiento de obstáculos y espaciamiento de ruta Consideraciones adicionales Publicación Formación de controladores de tránsito aéreo Estado de vigilancia
Tabla de Contenido
II-(ii)
Supervisión del sistema ATS Especificación de navegación Antecedentes Proceso de aprobación Contenido de una aplicación para una RNP-10 de aprobación operacional Requisitos de aeronave Los procedimientos operacionales
Equipo de navegación Designación del Plan de vuelo Disponibilidad de ayudas a la navegación En ruta Conocimientos de Piloto y entrenamiento Base de datos de navegación Supervisión de los operadores
Referencias
Capítulo 2. La aplicación de RNAV-5 Introducción Antecedentes Propósito Consideraciones ANSP Infraestructura de ayudas a la navegación Vigilancia ATS y Comunicación Franqueamiento de obstáculos y espaciamiento de ruta Consideraciones adicionales Publicación Entrenamiento de Controladores Estado de vigilancia Supervisión del sistema ATS Especificación de navegación Antecedentes Proceso de aprobación Requisitos de aeronaves Los procedimientos operativos
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-(iii)
Conocimientos de Piloto y entrenamiento Base de datos de navegación Supervisión de los operadores
Referencias
Capítulo 3. Aplicación de RNAV-1 y RNAV-2
Introducción Antecedentes Propósito
Consideraciones ANSP Infraestructura de ayudas a la navegación Vigilancia ATS y Comunicación Franqueamiento de obstáculos y espaciamiento de ruta Consideraciones adicionales Publicación Entrenamiento de Controladores Estado de vigilancia Supervisión del sistema ATS Especificación de navegación Antecedentes Proceso de aprobación Requisitos de aeronaves Los procedimientos operativos Conocimientos de Piloto y entrenamiento Base de datos de navegación Supervisión de los operadores
Referencia
Apéndice de la parte B. diferencias No significativas entre P-RNAV, EE.UU. y RNAV RNAV-1
PARTE C - APLICACIÓN RNP Capítulo 1. La aplicación de la RNP-4
Introducción
Tabla de Contenido
II-(iv)
Antecedentes Propósito
Consideraciones ANSP
Consideraciones de la infraestructura de ayudas a la navegación Comunicación y vigilancia Franqueamiento de obstáculos y espaciamiento de ruta Consideraciones adicionales Publicación Entrenamiento de Controladores Estado de vigilancia Supervisión del sistema ATS
Especificación de navegación
Antecedentes Proceso de aprobación Requisitos de aeronaves Los procedimientos operativos Conocimientos de Piloto y entrenamiento Base de datos de navegación Supervisión de los operadores
Referencias
Capítulo 2. La aplicación de la RNP 2 (pendiente de elaboración) Capítulo 3. La aplicación de RNP-1 básico
Introducción Antecedentes Propósito
Consideraciones ANSP
Consideraciones de la infraestructura de ayudas a la navegación Consideraciones Comunicación y vigilancia Franqueamiento de obstáculos y la separación horizontal Consideraciones adicionales Publicación Entrenamiento de Controladores Estado de vigilancia Supervisión del sistema ATS
Especificación de navegación
Antecedentes Proceso de aprobación Requisitos de aeronaves
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-(v)
Los procedimientos operativos Conocimientos de Piloto y entrenamiento Base de datos de navegación Supervisión de los operadores Referencias
Capítulo 4. La aplicación RNP 1 avanzado (pendiente de elaboración) Capítulo 5. La aplicación de la RNP APCH
Introducción Antecedentes Propósito
Consideraciones ANSP
Infraestructura de ayudas a la navegación Vigilancia ATS y Comunicación Franqueamiento de Obstáculos Consideraciones adicionales Publicación Entrenamiento de Controladores Estado de vigilancia Supervisión del sistema ATS
Especificación de navegación
Antecedentes Proceso de aprobación Requisitos de aeronaves Los procedimientos operativos Conocimientos de Piloto y entrenamiento Base de datos de navegación Supervisión de los operadores
Referencias Capítulo 6. La aplicación de la RNP AR APCH
Introducción Antecedentes Propósito
ANSP consideraciones
Consideraciones de la infraestructura de ayudas a la navegación Consideraciones Comunicación y vigilancia Franqueamiento de obstáculos y espaciamiento de ruta Consideraciones adicionales Publicación Entrenamiento de Controladores
Tabla de Contenido
II-(vi)
Estado de vigilancia Supervisión del sistema ATS
Especificación de navegación
Antecedentes Proceso de aprobación Requisitos de aeronaves Los procedimientos operativos Conocimientos y entrenamiento de Pilotos/Despachadores /operadores Base de datos de navegación Supervisión de los operadores
Evaluación de la seguridad
Referencias
ADJUNTOS AL VOLUMEN II
Adjunto. Navegación Vertical Barométrica VNAV
Introducción Antecedentes Propósito
Consideraciones ANSP
Aplicación de la Navegación barométrica VNAV Franqueamiento de obstáculos
3. Consideraciones generales para el desarrollo de la especificación barométrica VNAV
Consideraciones de la infraestructura de ayudas a la navegación Consideraciones de la Publicación Monitoreo e investigación de errores del sistema de navegación Informes de errores de navegación Adopción de Proveedores de Servicios Coordinación ATC
Especificación de navegación
Antecedentes Proceso de aprobación Requisitos de aeronaves Consideraciones MEL Requisitos del sistema de aeronaves Sistema de precisión Función de la continuidad Restricciones verticales Construcción de la trayectoria
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-(vii)
Procedimientos de la capacidad de carga de base de datos de navegación Límites de Temperatura Orientación y control Interfaz de usuario Desviación de la trayectoria y monitoreo Altitud barométrica Los procedimientos operativos Procedimientos generales de funcionamiento Configuración del altímetro Temperatura fría Los procedimientos de contingencia Conocimientos del piloto y entrenamiento Base de datos de navegación
Referencias
PRÓLOGO Este manual consta de dos volúmenes: Volumen I - Conceptos y Orientación de Aplicaciones Volumen II - La aplicación de RNAV y RNP Organización y contenido del Volumen II: Parte A - Generalidades Parte B - Aplicación de RNAV, contiene tres capítulos que describen la manera de aplicar RNAV-10, RNAV-5, y RNAV-1 y 2, respectivamente. Parte C - La aplicación de la RNP, contiene cuatro capítulos que describen la forma de aplicar la RNP-4, RNP-Básica 1; RNP APCH, y RNP AR APCH. Dos capítulos se reservan para la RNP 2 y Avanzado-RNP 1. Anexo A – Navegación barométrica VNAV Todos los capítulos de las partes B y C son destinados para el uso de las autoridades de aeronavegabilidad, ANSP, el espacio aéreo y los planificadores y especialistas PANS-OPS. Estos capítulos siguen la misma estructura: - Introducción - Consideraciones ANSP - Especificación de navegación - Referencias - Anexos
Observaciones específicas Este volumen está basado en las experiencias de los Estados que han utilizado las operaciones RNAV. Es una parte integral y complementaria del Volumen I - Concepto y Orientación de Aplicaciones. Las referencias están siempre al final de cada especificación de navegación en las partes B y C del Volumen II.
La evolución futura de este volumen Comentarios sobre este manual deberían estimarse desde todas las partes implicadas en el desarrollo y aplicación de PBN. Estos comentarios deben ser dirigidos a: Secretario General Organización de Aviación Civil Internacional OACI 999 University Street Montreal, Quebec, Canadá H3C 5H7

Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-(9)
Parte A GENERAL

II- (vii)
CAPÍTULO 1
RESEÑA DEL CONCEPTO DE NAVIGACIÓN BASADA EN EL PERFORMANCE (PBN)
INTRODUCCIÓN
La navegación basada en el performance (rendimiento) (PBN), concepto que se compone de tres elementos interrelacionados: especificación de navegación, la infraestructura ayudas a la navegación, y la aplicación de navegación. Nota.- Una explicación detallada del concepto PBN se presenta en el Volumen I, Parte A, Capítulo 1. Las especificaciones de navegación son utilizadas por los Estados como base para la certificación y aprobación operacional. Las especificaciones de navegación describen, en detalle, los requisitos puestos en el sistema de navegación de área para la operación a lo largo de una ruta en particular, procedimiento o dentro de un espacio aéreo en el que la aprobación de la navegación en contra de la especificación prescrita. Estos requisitos incluyen:
a) La performance requerida del sistema de navegación de área en términos de exactitud, integridad, continuidad y disponibilidad;
b) Las funciones disponibles en el sistema de navegación de área a fin de lograr el rendimiento requerido;
c) Los sensores de navegación, integrado dentro del sistema de navegación de área, que pueden ser utilizados para lograr el rendimiento necesario, y
d) La tripulación de vuelo y otros procedimientos necesarios para lograr el cumplimiento del mencionado sistema de navegación de área.
La infraestructura de ayudas a la navegación se refiere al espacio de ayudas a la navegación de tierra o que se mencionan en cada especificación de navegación. Las especificaciones de navegación que requieren monitoreo del performance y alerta a bordo se denominan especificaciones RNP. Las que no requieren monitoreo del performance y alerta a bordo se conocen como especificaciones RNAV. El uso de monitoreo del performance y alerta a bordo distinguen entre las RNP y las RNAV y es una conveniencia. Esto simplifica el hecho de que existen algunas diferencias y muchos puntos en común, aspectos funcionales de los sistemas de la aeronave que deben llevar a cabo las operaciones de vuelo deseado.
Tabla de Contenido
II-(viii)
Una "aplicación de navegación" es cuando una especificación de navegación asociada a la infraestructura de ayudas a la navegación se aplica a Rutas ATS, procedimientos
de aproximación por instrumentos y/o volumen definido de espacio aéreo, de conformidad con el
concepto de espacio aéreo. Ejemplos de cómo la especificación de navegación y la infraestructura de ayudas a la navegación pueden ser usadas juntas en una aplicación de navegación que incluyen RNAV o RNP, SID y STAR, rutas ATS RNAV o RNP, así como los procedimientos de aproximación RNP.
USO Y ALCANCE DE LAS ESPECIFICACIONES DE NAVEGACIÓN La mayoría de las especificaciones de navegación de la OACI que figuran en este volumen fueron desarrolladas originalmente para uso regional con el fin de responder a las necesidades operacionales de los conceptos específicos del espacio aéreo. Algunas de las aplicaciones de navegación de estas especificaciones se usan en los conceptos de espacio aéreo oceánico o remoto, el espacio aéreo continental, otros se utilizan en los conceptos de espacio aéreo continental o terminal. La proliferación de especificaciones de la navegación regional o Estatal se evita publicando estas especificaciones de navegación de OACI, que permiten a las regiones y los Estados a utilizar las especificaciones de navegación de la OACI en lugar de desarrollar nuevas especificaciones. En la Tabla-01 se muestra las especificaciones de navegación y sus precisiones de navegación publicadas en las partes B y C de este volumen. Demuestra, por ejemplo, que la designación de una especificación de navegación oceánica o remota, en ruta o terminal incluye una indicación de la precisión de navegación requerida, y que la designación de especificaciones de navegación utilizadas en la aproximación final es diferente. Tabla-01 Aplicación de la especificación de navegación por fase de vuelo
1. Los números que figuran en el cuadro se refieren al 95 por ciento de exactitud (NM).
2. RNAV-5 es una especificación de navegación en ruta que puede ser utilizada para la parte inicial de una STAR fuera de 30 NM del ARP y por encima de la MSA.
3. RNP-2 y RNP-1b Avanzado, se espera que se incluyan en una futura revisión del manual de la PBN.
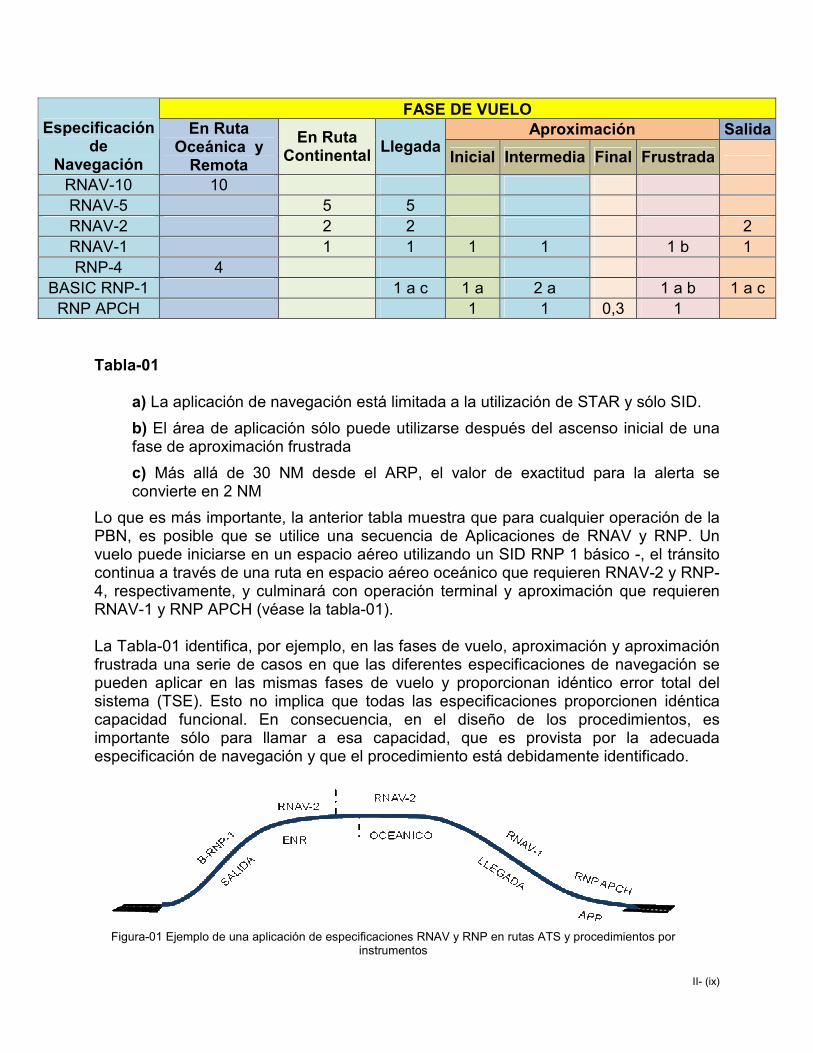
II- (ix)
Tabla-01
a) La aplicación de navegación está limitada a la utilización de STAR y sólo SID.
b) El área de aplicación sólo puede utilizarse después del ascenso inicial de una fase de aproximación frustrada
c) Más allá de 30 NM desde el ARP, el valor de exactitud para la alerta se convierte en 2 NM
Lo que es más importante, la anterior tabla muestra que para cualquier operación de la PBN, es posible que se utilice una secuencia de Aplicaciones de RNAV y RNP. Un vuelo puede iniciarse en un espacio aéreo utilizando un SID RNP 1 básico -, el tránsito continua a través de una ruta en espacio aéreo oceánico que requieren RNAV-2 y RNP-4, respectivamente, y culminará con operación terminal y aproximación que requieren RNAV-1 y RNP APCH (véase la tabla-01). La Tabla-01 identifica, por ejemplo, en las fases de vuelo, aproximación y aproximación frustrada una serie de casos en que las diferentes especificaciones de navegación se pueden aplicar en las mismas fases de vuelo y proporcionan idéntico error total del sistema (TSE). Esto no implica que todas las especificaciones proporcionen idéntica capacidad funcional. En consecuencia, en el diseño de los procedimientos, es importante sólo para llamar a esa capacidad, que es provista por la adecuada especificación de navegación y que el procedimiento está debidamente identificado.
FASE DE VUELO Aproximación Salida Especificación
de Navegación
En Ruta Oceánica y Remota
En Ruta Continental
Llegada Inicial Intermedia Final Frustrada
RNAV-10 10 RNAV-5 5 5 RNAV-2 2 2 2 RNAV-1 1 1 1 1 1 b 1 RNP-4 4
BASIC RNP-1 1 a c 1 a 2 a 1 a b 1 a c RNP APCH 1 1 0,3 1
Figura-01 Ejemplo de una aplicación de especificaciones RNAV y RNP en rutas ATS y procedimientos por
instrumentos
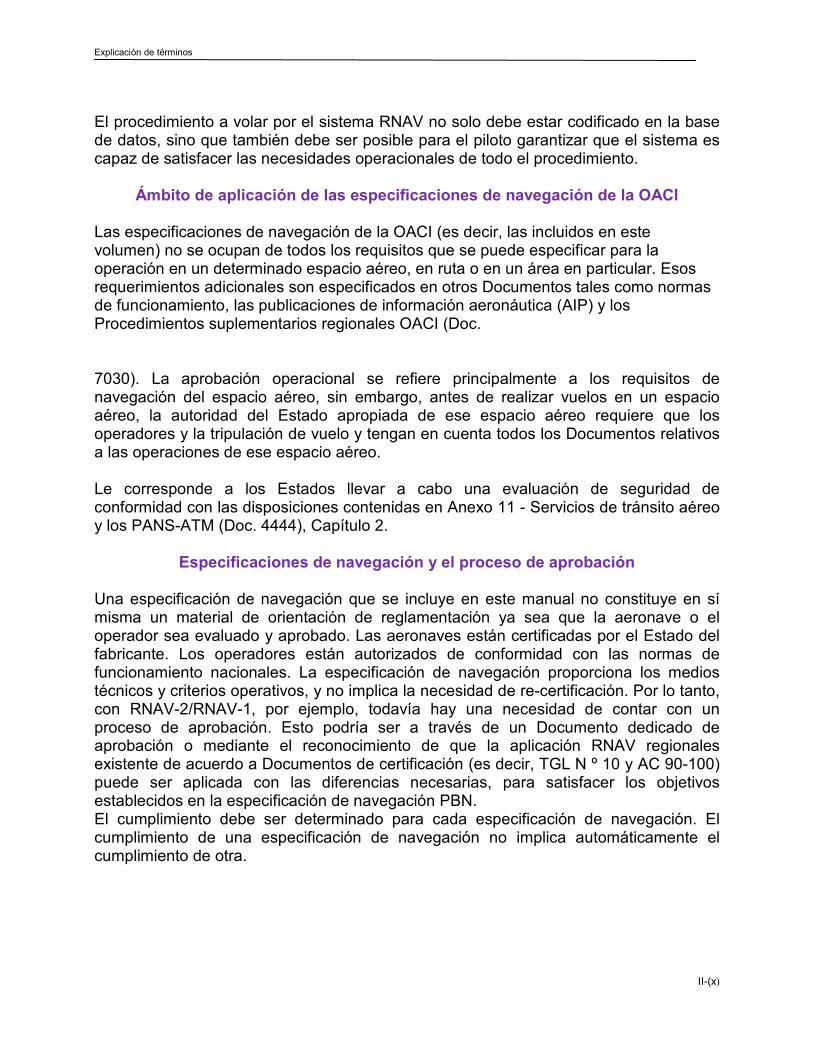
Explicación de términos
II-(x)
El procedimiento a volar por el sistema RNAV no solo debe estar codificado en la base de datos, sino que también debe ser posible para el piloto garantizar que el sistema es capaz de satisfacer las necesidades operacionales de todo el procedimiento.
Ámbito de aplicación de las especificaciones de navegación de la OACI Las especificaciones de navegación de la OACI (es decir, las incluidos en este volumen) no se ocupan de todos los requisitos que se puede especificar para la operación en un determinado espacio aéreo, en ruta o en un área en particular. Esos requerimientos adicionales son especificados en otros Documentos tales como normas de funcionamiento, las publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales OACI (Doc. 7030). La aprobación operacional se refiere principalmente a los requisitos de navegación del espacio aéreo, sin embargo, antes de realizar vuelos en un espacio aéreo, la autoridad del Estado apropiada de ese espacio aéreo requiere que los operadores y la tripulación de vuelo y tengan en cuenta todos los Documentos relativos a las operaciones de ese espacio aéreo. Le corresponde a los Estados llevar a cabo una evaluación de seguridad de conformidad con las disposiciones contenidas en Anexo 11 - Servicios de tránsito aéreo y los PANS-ATM (Doc. 4444), Capítulo 2.
Especificaciones de navegación y el proceso de aprobación Una especificación de navegación que se incluye en este manual no constituye en sí misma un material de orientación de reglamentación ya sea que la aeronave o el operador sea evaluado y aprobado. Las aeronaves están certificadas por el Estado del fabricante. Los operadores están autorizados de conformidad con las normas de funcionamiento nacionales. La especificación de navegación proporciona los medios técnicos y criterios operativos, y no implica la necesidad de re-certificación. Por lo tanto, con RNAV-2/RNAV-1, por ejemplo, todavía hay una necesidad de contar con un proceso de aprobación. Esto podría ser a través de un Documento dedicado de aprobación o mediante el reconocimiento de que la aplicación RNAV regionales existente de acuerdo a Documentos de certificación (es decir, TGL N º 10 y AC 90-100) puede ser aplicada con las diferencias necesarias, para satisfacer los objetivos establecidos en la especificación de navegación PBN. El cumplimiento debe ser determinado para cada especificación de navegación. El cumplimiento de una especificación de navegación no implica automáticamente el cumplimiento de otra.
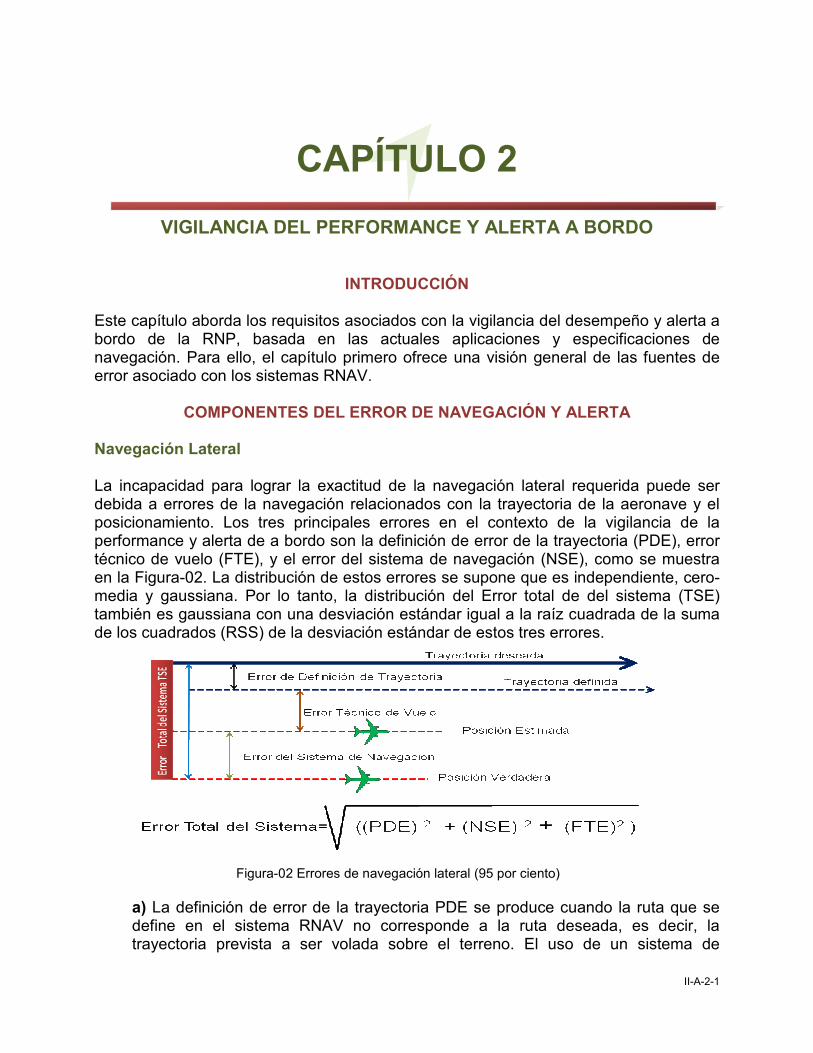
II-A-2-1
CAPÍTULO 2
VIGILANCIA DEL PERFORMANCE Y ALERTA A BORDO
INTRODUCCIÓN Este capítulo aborda los requisitos asociados con la vigilancia del desempeño y alerta a bordo de la RNP, basada en las actuales aplicaciones y especificaciones de navegación. Para ello, el capítulo primero ofrece una visión general de las fuentes de error asociado con los sistemas RNAV.
COMPONENTES DEL ERROR DE NAVEGACIÓN Y ALERTA Navegación Lateral La incapacidad para lograr la exactitud de la navegación lateral requerida puede ser debida a errores de la navegación relacionados con la trayectoria de la aeronave y el posicionamiento. Los tres principales errores en el contexto de la vigilancia de la performance y alerta de a bordo son la definición de error de la trayectoria (PDE), error técnico de vuelo (FTE), y el error del sistema de navegación (NSE), como se muestra en la Figura-02. La distribución de estos errores se supone que es independiente, cero-media y gaussiana. Por lo tanto, la distribución del Error total de del sistema (TSE) también es gaussiana con una desviación estándar igual a la raíz cuadrada de la suma de los cuadrados (RSS) de la desviación estándar de estos tres errores.
a) La definición de error de la trayectoria PDE se produce cuando la ruta que se define en el sistema RNAV no corresponde a la ruta deseada, es decir, la trayectoria prevista a ser volada sobre el terreno. El uso de un sistema de
Figura-02 Errores de navegación lateral (95 por ciento)
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-2
navegación RNAV que supone una trayectoria definida en representación de la trayectoria y que se ha cargado en la base de datos de navegación. Una trayectoria coherente, repetible no puede ser definido para un viraje que permite un viraje en un punto de recorrido de vuelo por, requiere de un viraje en punto de recorrido de sobrevuelo, o se produce cuando la aeronave alcanza una altitud de destino (véase el Anexo A Volumen I para una explicación más detallada). En estos casos, la base de datos de navegación contiene una trayectoria de vuelo deseada punto a punto, pero no cuenta para el sistema RNAV la definición de una trayectoria “de vuelo por” o “sobre vuelo” y en la realización de una maniobra. Una significativa definición de error de la trayectoria PDE y error técnico de vuelo FTE no puede ser establecido sin una trayectoria definida, resultante en la variabilidad del viraje. En contraste, cuando una transición tramo Radio to Fix (RF) o transición de radio fijo (FRT) se usa, como con algunas especificaciones RNP (véase más adelante), una trayectoria puede ser definida y, por tanto, PDE y FTE puede ser determinada. Asimismo, una determinada trayectoria repetible no puede ser definida para las trayectorias basadas en rumbos y la consiguiente variabilidad de trayectoria es acomodada en el diseño de la ruta.
b) FTE se refiere a la capacidad de la tripulación o piloto automático de seguir la trayectoria definida o derrota, incluyendo cualquier pantalla de error (por ejemplo, el indicador de desviación curso (CDI) error de centrado). FTE puede ser monitoreado por el piloto automático o procedimientos de la tripulación y la medida en que estos procedimientos necesiten ser apoyadas por otros medios depende, por ejemplo, en la fase de vuelo y el tipo de operaciones. Este monitoreo podría ser proporcionado por un visualizador de mapas.
Nota.- FTE que a veces se denomina error de dirección de trayectoria (PSE). (Path Steering Error)
c) NSE (error del sistema de navegación) se refiere a la diferencia entre la posición estimada de la aeronave y la posición real.
Nota.- NSE que a veces se denomina estimación de error de posicionamiento (PEE). (Positioning Estimation Error)
Navegación Longitudinal El desempeño longitudinal implica una posición en contra de la navegación a lo largo de la trayectoria (por ejemplo, control 4-D). Sin embargo, en el momento actual, no existen especificaciones de navegación que requieran de control 4-D, y no hay error técnico de vuelo (FTE) en la dimensión longitudinal. En la actualidad las especificaciones de navegación definen los requerimientos de precisión a lo largo de la derrota, que incluye NSE y PDE. El PDE es considerado insignificante. La precisión a lo largo de la trayectoria afecta la presentación de informes de posición (por ejemplo, "10 NM a ABC") y el diseño de procedimientos (por ejemplo, las altitudes mínimas de segmento donde una aeronave puede iniciar el descenso una vez cruce un punto de referencia) El requisito de exactitud de las especificaciones RNP y RNAV está definido para las dimensiones laterales a lo largo de la trayectoria. Los requisitos de monitoreo de la
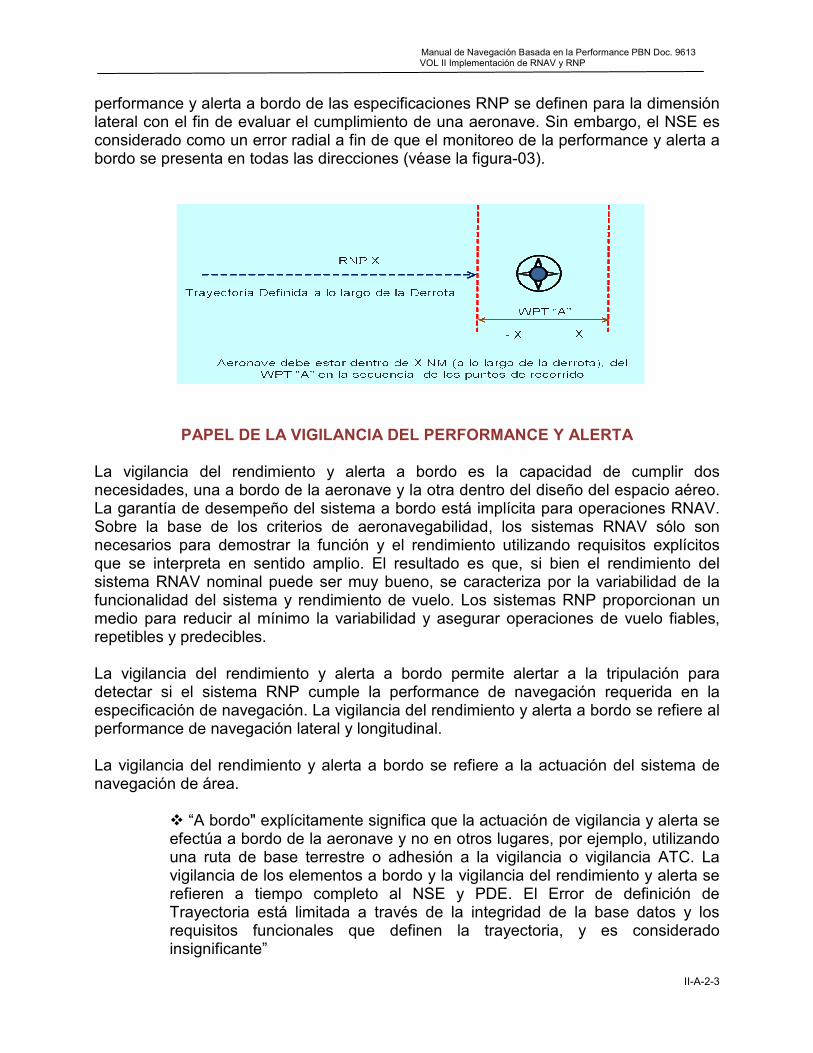
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-2-3
performance y alerta a bordo de las especificaciones RNP se definen para la dimensión lateral con el fin de evaluar el cumplimiento de una aeronave. Sin embargo, el NSE es considerado como un error radial a fin de que el monitoreo de la performance y alerta a bordo se presenta en todas las direcciones (véase la figura-03).
PAPEL DE LA VIGILANCIA DEL PERFORMANCE Y ALERTA
La vigilancia del rendimiento y alerta a bordo es la capacidad de cumplir dos necesidades, una a bordo de la aeronave y la otra dentro del diseño del espacio aéreo. La garantía de desempeño del sistema a bordo está implícita para operaciones RNAV. Sobre la base de los criterios de aeronavegabilidad, los sistemas RNAV sólo son necesarios para demostrar la función y el rendimiento utilizando requisitos explícitos que se interpreta en sentido amplio. El resultado es que, si bien el rendimiento del sistema RNAV nominal puede ser muy bueno, se caracteriza por la variabilidad de la funcionalidad del sistema y rendimiento de vuelo. Los sistemas RNP proporcionan un medio para reducir al mínimo la variabilidad y asegurar operaciones de vuelo fiables, repetibles y predecibles. La vigilancia del rendimiento y alerta a bordo permite alertar a la tripulación para detectar si el sistema RNP cumple la performance de navegación requerida en la especificación de navegación. La vigilancia del rendimiento y alerta a bordo se refiere al performance de navegación lateral y longitudinal. La vigilancia del rendimiento y alerta a bordo se refiere a la actuación del sistema de navegación de área.
� “A bordo" explícitamente significa que la actuación de vigilancia y alerta se efectúa a bordo de la aeronave y no en otros lugares, por ejemplo, utilizando una ruta de base terrestre o adhesión a la vigilancia o vigilancia ATC. La vigilancia de los elementos a bordo y la vigilancia del rendimiento y alerta se refieren a tiempo completo al NSE y PDE. El Error de definición de Trayectoria está limitada a través de la integridad de la base datos y los requisitos funcionales que definen la trayectoria, y es considerado insignificante”
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-4
� “La Supervisión o monitoreo" se refiere a la vigilancia de la actuación de la aeronave en lo que respecta a su capacidad para determinar el error de la posición y/o seguir la trayectoria deseada”
� “La alerta" se refiere a la supervisión o monitoreo: si el sistema de navegación de la aeronave no cumple suficientemente bien, éste alertara a la tripulación de vuelo”
Los requisitos de vigilancia y alerta puede estar satisfechos por:
a) un sistema de navegación a bordo tiene una capacidad de vigilancia y alerta del NSE (por ejemplo, RAIM o algoritmo FDE) además de una pantalla de indicación de navegación lateral (por ejemplo, CDI) que le permiten a la tripulación controlar el FTE. En el supuesto de que el PDE es insignificante, el requisito se cumple, porque NSE y FTE son supervisados por a una vigilancia del TSE , o
b) un sistema de navegación a bordo que tiene un seguimiento del TSE y la capacidad de alerta.
El efecto neto de lo anterior es evidente en las TSE (véase la Tabla-02). En la Tabla-02, las especificaciones RNP-X que no requieren de RF o FRT, tienen mucho en común con las especificaciones RNAV en lo que respecta al PDE ya que la trayectoria no está definida, lo que resulta en la necesidad de facilitar más la protección del espacio aéreo en los virajes. El concepto PBN utiliza el término de la vigilancia del rendimiento y alerta a bordo en lugar del término de contención. Esto es para evitar la confusión entre el uso actual de contención en diversos Documentos de los diferentes ámbitos de experiencia. Por ejemplo:
a) “Contención” se refiere a la región en el que el avión seguirá estando el 95 por ciento del tiempo. Los términos asociados han sido “valor de contención “y “distancia de la contención “y el espacio aéreo de protección a ambos lados de una ruta ATS RNAV.
Tabla-02. Efecto de a bordo de la supervisión del rendimiento y alerta o TSE
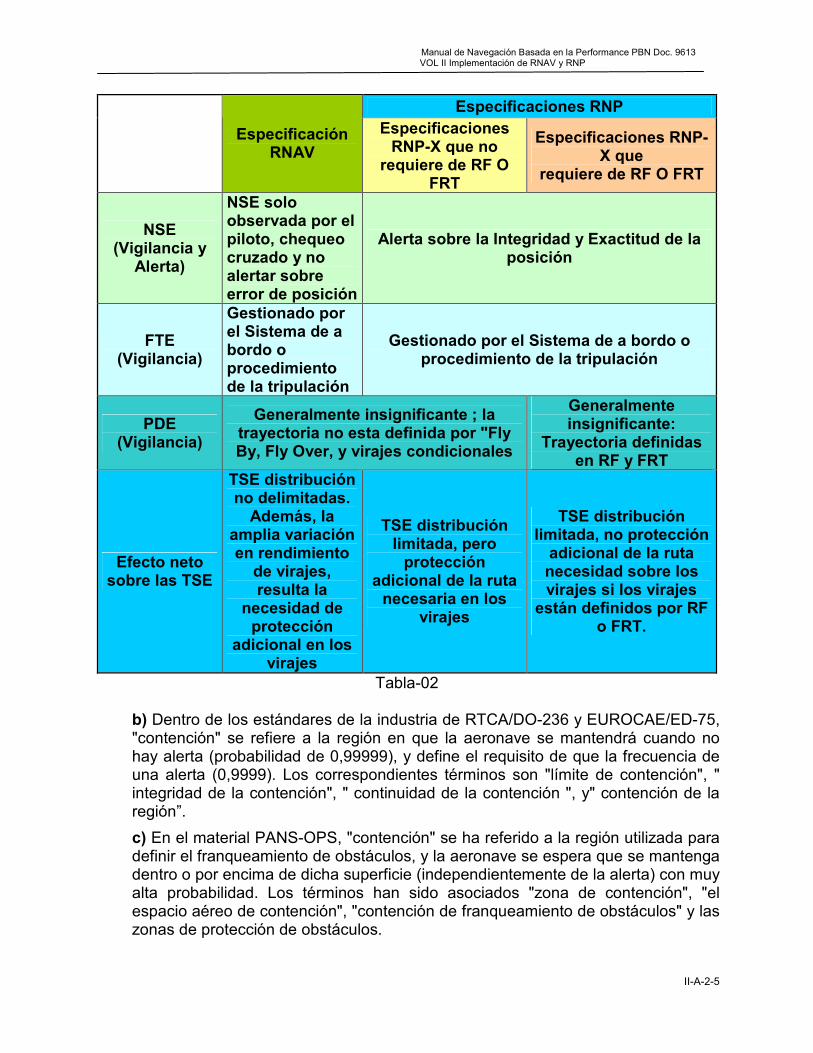
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-2-5
Especificaciones RNP
Especificación RNAV
Especificaciones RNP-X que no
requiere de RF O FRT
Especificaciones RNP-X que
requiere de RF O FRT
NSE (Vigilancia y
Alerta)
NSE solo observada por el piloto, chequeo cruzado y no alertar sobre error de posición
Alerta sobre la Integridad y Exactitud de la posición
FTE (Vigilancia)
Gestionado por el Sistema de a bordo o procedimiento de la tripulación
Gestionado por el Sistema de a bordo o procedimiento de la tripulación
PDE (Vigilancia)
Generalmente insignificante ; la trayectoria no esta definida por "Fly By, Fly Over, y virajes condicionales
Generalmente insignificante:
Trayectoria definidas en RF y FRT
Efecto neto sobre las TSE
TSE distribución no delimitadas. Además, la
amplia variación en rendimiento
de virajes, resulta la
necesidad de protección
adicional en los virajes
TSE distribución limitada, pero protección
adicional de la ruta necesaria en los
virajes
TSE distribución limitada, no protección adicional de la ruta necesidad sobre los virajes si los virajes
están definidos por RF o FRT.
Tabla-02
b) Dentro de los estándares de la industria de RTCA/DO-236 y EUROCAE/ED-75, "contención" se refiere a la región en que la aeronave se mantendrá cuando no hay alerta (probabilidad de 0,99999), y define el requisito de que la frecuencia de una alerta (0,9999). Los correspondientes términos son "límite de contención", " integridad de la contención", " continuidad de la contención ", y" contención de la región”.
c) En el material PANS-OPS, "contención" se ha referido a la región utilizada para definir el franqueamiento de obstáculos, y la aeronave se espera que se mantenga dentro o por encima de dicha superficie (independientemente de la alerta) con muy alta probabilidad. Los términos han sido asociados "zona de contención", "el espacio aéreo de contención", "contención de franqueamiento de obstáculos" y las zonas de protección de obstáculos.
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-6
Las anteriores expresiones de la OACI "valor de contención" y "distancia de contención" han sido sustituidos por la precisión de la navegación de TSE.
Requisitos de la vigilancia de la performance y alerta para operaciones RNP
RNP-4, RNP- 1 Básica y RNP APCH Los requisitos de la vigilancia de la performance y alerta para RNP-4, RNP-1 Básica y RNP APCH tienen terminología común de aplicación. Cada una de estas especificaciones de navegación RNP incluye requisitos para las siguientes características:
a) Precisión: La precisión define el requisito del 95 por ciento de TSE para estas dimensiones donde el requisito de precisión es especificada. El requisito de exactitud se ha armonizado con las especificaciones de navegación RNAV y es siempre igual al valor de la exactitud. Un aspecto único de las especificaciones de navegación RNP es que la exactitud es una de las características de rendimiento que se supervisa, como se describe en el siguiente párrafo.
b) La supervisión de la performance: El avión, o la combinación piloto avión, requiere supervisar el TSE, y proporcionar una alerta si el requisito de precisión no se cumple o si la probabilidad de que el TSE es superior a dos veces el valor de precisión mayor que 10-5. En la medida en que los procedimientos operativos se utilicen para satisfacer este requisito, los procedimientos de la tripulación, características de equipos, y la instalación son evaluados por su eficacia y equivalencia.
c) Las fallas de avión: las fallas del equipo de a bordo se considera dentro de las regulaciones de la aeronavegabilidad. Las fallas son clasificadas por la gravedad de los efectos a nivel de la aeronave, y el sistema deberá ser diseñado para reducir la probabilidad de las fallas o mitigar sus efectos. Ambos mal funcionamientos (equipo operativo, pero no de salida de manera adecuada) y la pérdida de la función (el equipo deja de funcionar) se abordan. Los requisitos del sistema doble se determinan sobre la base de la continuidad operacional (por ejemplo, operaciones oceánicas y remotas). Los requisitos de las características de fallas de las aeronaves no son las únicas especificaciones de navegación de las RNP.
d) Los fallos de señal en el espacio: las características de la señal en el espacio de navegación se abordan en el Anexo 10 - Telecomunicaciones Aeronáuticas, y son de responsabilidad de la ANSP.
La vigilancia del performance es único requisito para las especificaciones de navegación RNP. El efecto neto de la especificación de navegación RNP se limita a proporcionar la distribución de las TSE. Desde la definición de error de la trayectoria se supone que es insignificante, el requisito de vigilancia se reduce a los otros dos
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-2-7
componentes de las TSE, es decir, FTE y NSE. Se supone que FTE es un proceso estocástico ergódico1 dentro de un determinado modo de control de vuelo. Como resultado de ello, la distribución del FTE es constante en el tiempo dentro de un determinado modo de control de vuelo. Sin embargo, en contraste, la distribución NSE varía con el tiempo debido a un número de cambios de las características de la evolución, en particular:
1. Una ergodica es un proceso en el que cada secuencia o muestra representativa del conjunto es igualmente importante. Se dio cuenta de que esto no es necesariamente cierto para todas las operaciones previstas en los sistemas RNAV y RNP, especialmente cuando está involucrada la operación manual, pero el valor medio en un gran número de operaciones esta suposición se convierte en válido. (Nota adicional del traductor): Un proceso estocástico ergódico quiere decir que las medias calculadas a partir de observaciones pasadas no pueden diferir persistentemente de la media temporal de acontecimientos futuros. Como ha señalado Vercelli, "sólo en este caso el proceso estocástico convergirá hacia un estado estacionario, asegurando el aprendizaje y la convergencia hacia una distribución de probabilidad completamente fiable. Cuando el proceso estocástico es estacionario pero no ergódico estamos en el mundo de incertidumbre". Es decir, como señala Davidson (1991: 132), "En la circunstancia de ergodicidad de las distribuciones de probabilidad objetivas, la probabilidad es conocimiento, no incertidumbre”.(Fuente: http://www.joaquinpi.com/topic4)
a) sensores de navegación seleccionados: los sensores de navegación que se utilizan para estimar la posición, tales como el GNSS o DME/DME;
b) La geometría relativa de la posición de la aeronave para soportar la navegación: todas las ayudas a la navegación tienen variabilidad, si bien las características específicas de cambio, el rendimiento GNSS se ve afectado por la geometría relativa de los satélites, en comparación con el avión (las líneas de posición debe ser bien distribuidos en el espacio para apoyar la buena resolución en el espacio y el tiempo). Soluciones de navegación DME/DME se ven afectados por la inclusión del ángulo entre el dos estaciones DME en el avión (90 grados siendo el óptimo) y la distancia a la estación DME, ya que el transpondedor DME de la aeronave puede tener cada vez más amplia gama de errores con el aumento de la distancia;
c) Unidades de referencia inercial: las características de error: los errores aumentan con el tiempo desde la última actualización.
Aunque el TSE puede cambiar significativamente con el tiempo por una serie de razones, incluidas las mencionadas arriba, la especificación de navegación RNP proporciona garantías de que el TSE sigue siendo la distribución adecuada a la operación. Esto se debe a dos requisitos relacionados con la distribución de las TSE, a saber:
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-8
a) el requisito de que el TSE sigue siendo igual o inferior a la precisión requerida para el 95 por ciento del tiempo del vuelo, y b) la probabilidad de que el TSE de cada aeronave supera el límite especificado TSE (igual a dos veces el valor de la exactitud), sin anuncio es inferior a 10-5.
Normalmente, el requisito TSE de 10-5 proporciona una mayor restricción en el rendimiento. Por ejemplo, con cualquier sistema que tiene TSE con una distribución normal de error transversal a la derrota, el requisito de 10-5 de seguimiento se limita a la desviación estándar de 2 × (valor de precisión)/ 4.45 = valor de precisión /2.23, mientras que el requisito del 95 % habría permitido que la desviación estándar a ser tan grande como el valor de exactitud /1.96. Es importante entender que, si bien estas características definen los requisitos mínimos que deben cumplirse, ellas no definen la distribución actual del TSE. La distribución actual del TSE, Cabe esperar que suelan ser mejor que el requisito, pero debe haber pruebas de los resultados reales, si un menor valor del TSE se va a utilizar. En la aplicación de la vigilancia del performance de las aeronaves, puede haber una variabilidad significativa en la forma en que los errores individuales se gestionan:
a) Algunos sistemas monitorean los actuales errores transversales y a lo largo de la derrota por separado, mientras que otros monitorean el NSE para simplificar el monitoreo y eliminar la dependencia de la trayectoria de la aeronave, por ejemplo, distribuciones de error sobre la base del típico elíptica 2-D.
b) Algunos sistemas incluyen el FTE en el monitor, tomando el valor actual del FTE como un sesgo en la distribución de las TSE.
c) Para los sistemas básicos GNSS, la exactitud y los requisitos de 10-5 se cumplen como un subproducto de requisitos del ABAS que se han definido en equipos normalizados y la distribución del FTE normalizado para la pantalla del indicador de desviación curso (CDI).
Es importante que el monitoreo de la performance no se considera como error de seguimiento. Una alerta del monitoreo del performance se publicará cuando el sistema no puede garantizar, con la suficiente integridad, que la posición cumple con los requisitos de precisión. Cuando la alerta se emite, la probable causa es la pérdida de la capacidad de validar los datos de la posición (insuficiencia de satélites puede ser una posible causa). Por tal situación, lo más probable es que la posición de la aeronave en ese momento es exactamente la misma posición indicada en la pantalla del piloto. Suponiendo que la trayectoria de vuelo ha sido correctamente volada, el FTE estaría dentro de los límites y, por tanto, la probabilidad de que el TSE se exceda a dos veces el valor de la precisión justo antes de la alerta que es de aproximadamente 10-5. Sin embargo, no se puede suponer que simplemente porque no hay ninguna alerta del TSE sea inferior a dos veces el valor de la precisión: el TSE puede ser más grande. Un ejemplo es para los aviones que cuenta con un FTE basado en un error de distribución
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-2-9
Fijo: de estos sistemas, si los grandes FTE crecen, no son de alerta emitidos por el sistema, incluso cuando el TSE es muchas veces mayor que el valor de precisión. Por esta razón, los procedimientos operacionales para vigilar la FTE son importantes. Aplicación del Monitoreo de performance y alerta para evaluaciones de riesgo
Los requisitos de monitoreo de la performance y alerta para RNP-4, RNP-1 Básico y RNP APCH no obvian la necesidad de evaluaciones de seguridad, utilizando un indicador de riesgo, como las colisiones por hora o excursiones fuera de la zona de franqueamiento de obstáculos, para determinar el mínimo de separación de obstáculos y los criterios de franqueamiento de obstáculos para estas rutas. Dado que la relación entre el nivel de riesgo de colisión, la precisión y el espaciamiento de ruta o franqueamiento de obstáculos en general es complejo, no es conveniente asumir simplemente que el espaciamiento de ruta es adecuado (tramo a tramo) es cuatro veces el valor de la exactitud, o para asumir que el franqueamiento de obstáculos es de dos veces el valor de la precisión. Por ejemplo, el riesgo de colisión entre aeronaves y entre aeronaves y obstáculos depende de la probabilidad de la pérdida de la separación en la dimensión en estudio y la exposición a la pérdida de la separación. La exposición puede ser evaluado en el tiempo (por ejemplo, el tiempo que tarda en realizar una operación de aproximación) o más el número de eventos de riesgo (por ejemplo, el número de aeronaves que se pasaron en una hora). La evaluación de la seguridad pueden utilizar los resultados de los requisitos del monitoreo del performance y alerta para presentar una limitada distribución de las TSE en cada dimensión, la distribución limitada resultante de la envolvente deberá ser validada. Además, debe prestarse una atención especial al ámbito de aplicación de estos límites, ya que las distribuciones no cubren, por ejemplo, el error humano. Además, los errores de la base de datos de navegación no están cubiertos por las especificaciones de navegación basada en PBN (ver las partes B y C, de este volumen). Es bien sabido que "una metida de patas" tipo de errores son una fuente importante de errores en la navegación y, como aumenta la precisión a través de la aplicación de los GNSS, se convierte en la fuente más importante de riesgo. Estos han sido tenidos en cuenta en las evaluaciones de seguridad para la determinación de los mínimos de separación por parte de la OACI y de separación mínima por el Grupo de separación y seguridad del espacio aéreo (SASP). Aunque la determinación de criterios de franqueamiento de obstáculos por parte del Panel de Procedimientos de vuelo por instrumentos (IFPP) OACI se basa tradicionalmente en el caso libre de culpa, ha sido encontrado en repetidas ocasiones que, con métodos modernos de navegación basados en los GNSS, la integridad y la continuidad del servicio son de importancia crítica en el nivel resultante de seguridad. Desviaciones resultantes de una mezcla de libre culpa de performance y algunos (pero no todos) los fallos en que esas desviaciones no son anunciadas se han puesto de manifiesto. Por lo tanto, mucho cuidado es necesario con respecto al alcance exacto de las evaluaciones de seguridad pertinentes.
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-10
En la realización de una evaluación de la seguridad, los Estados pueden optar por tener en cuenta que el conjunto de la distribución (de todas las aeronaves que operen en la ruta o procedimiento) tendrá un TSE mejor que limitan la distribución permitida por los requisitos de vigilancia de la performance y de alerta. Sin embargo, al hacerlo, debe haber pruebas del real rendimiento conseguido.
Aplicación de la vigilancia del performance y alerta de la RNP AR APCH Los requisitos de la vigilancia del performance y alerta para aproximaciones RNP AR APCH incluyen muchas de las mismas características en cuanto a la RNP-4, Básica RNP1- y RNP APCH. Sin embargo, en el caso de la RNP AR APCH, estos requisitos pueden ser más estrictos y una serie de requisitos adicionales se pueden aplicar para vigilar más de cerca el control de cada fuente de error. Existen básicamente dos maneras para determinar los criterios del franqueamiento de obstáculos a través de un análisis. Una forma es obtener el franqueamiento de obstáculo para alcanzar el nivel de seguridad perseguido, dado los requisitos predefinidos de la mitigación operacional de las aeronaves. La otra forma para derivar los requisitos operacionales de mitigación de las aeronaves y el nivel de seguridad, habida cuenta los criterios predefinidos de franqueamiento de obstáculos. Es de vital importancia en la comprensión de la metodología utilizada para la RNP AR, cuando este último método es seguido, es decir, los franqueamientos de obstáculos para las operaciones RNP AR APCH se estableció por primera vez a tener una anchura total de cuatro veces el valor de la precisión (± dos veces el valor de la exactitud centrada en la trayectoria) después de que los requisitos operacionales y de mitigación de los aviones fueron desarrollados para satisfacer el nivel de seguridad perseguido. En el caso de los GNSS, los requerimientos de la señal en el espacio para RNP AR APCH no se establecen sobre la base de la NSE. En lugar de ello, se describe en términos de la TSE para asegurar un riesgo aceptable que el avión vuela fuera del área de franqueamiento de obstáculos. Los requisitos de falla de la aeronave más restrictivos; más estrictos de vigilancia de la performance y alerta están definidos por muchas fuentes de error.
Requisitos del sistema de vigilancia de la performance y alerta Los siguientes ejemplos se proporcionan para valores de RNP-1 básica: Precisión: Durante las operaciones en el espacio aéreo o en rutas designadas como RNP-1 Básica, el error total lateral del sistema debe ser de una precisión de ± 1 NM al menos el 95 % del tiempo total del vuelo. El error a lo largo de la trayectoria debe también estar dentro de ± 1 NM, por lo menos el 95 % del tiempo total del vuelo Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como una falla mayor en virtud de la condición de regulación de aeronavegabilidad (es decir, 10-5 por hora).
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-2-11
Continuidad: La pérdida de la función está clasificada como una condición de falla menor si el operador puede revertir a un sistema de navegación diferente y proceder a un aeropuerto adecuado. La vigilancia de la performance y alerta: El sistema RNP, o el sistema RNP y en combinación con el piloto, deberán proporcionar una alerta si el requisito de precisión no se cumple, o si la probabilidad de que la TSE lateral sea superior a 2 MN mayor que 10-5. La señal en el espacio: Si está utilizando el GNSS, el equipo de navegación de la aeronave deberá presentar una alerta si la probabilidad de que los errores de la señal en el espacio que causan un error de posición lateral superior a 2 NM y supera 10-7 por hora (Anexo 10, Volumen I, Tabla 3.7.2.4-1).
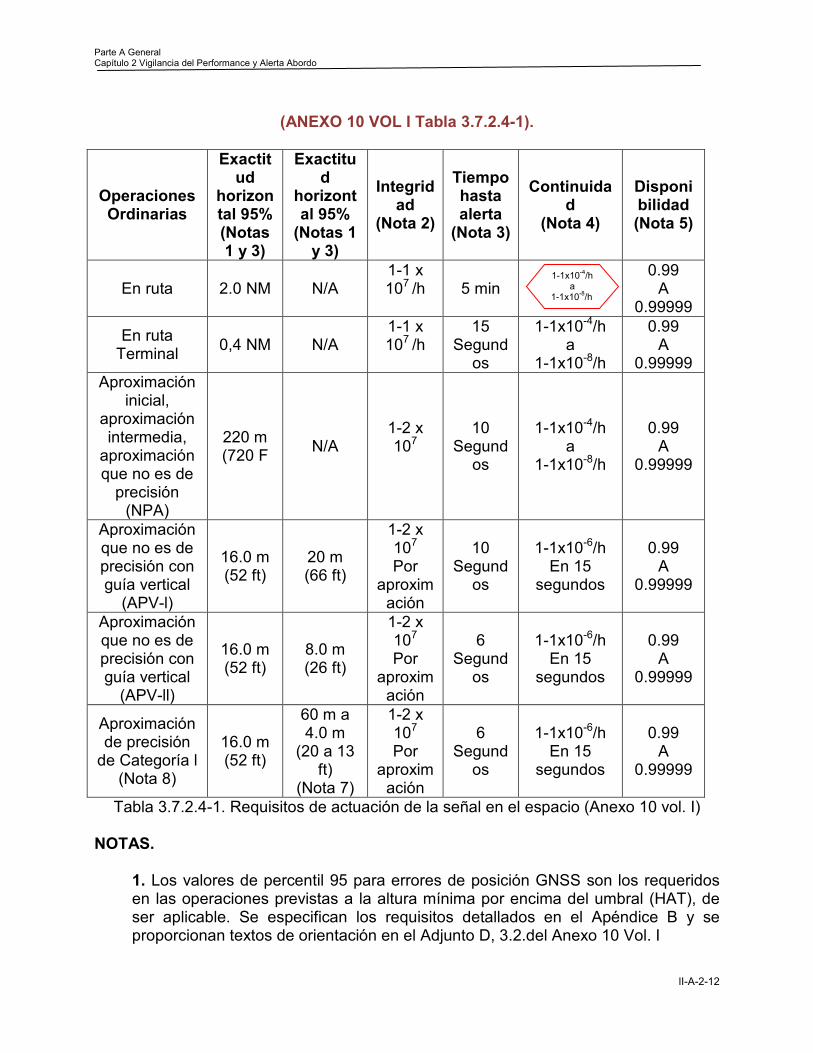
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-12
(ANEXO 10 VOL I Tabla 3.7.2.4-1).
Operaciones Ordinarias
Exactitud
horizontal 95% (Notas 1 y 3)
Exactitud
horizontal 95% (Notas 1
y 3)
Integridad
(Nota 2)
Tiempo hasta alerta (Nota 3)
Continuidad
(Nota 4)
Disponibilidad (Nota 5)
En ruta 2.0 NM N/A 1-1 x 107 /h
5 min 0.99
A 0.99999
En ruta Terminal
0,4 NM N/A 1-1 x 107 /h
15 Segundos
1-1x10-4/h a
1-1x10-8/h
0.99 A
0.99999 Aproximación
inicial, aproximación intermedia, aproximación que no es de precisión (NPA)
220 m (720 F
N/A 1-2 x 107
10 Segundos
1-1x10-4/h a
1-1x10-8/h
0.99 A
0.99999
Aproximación que no es de precisión con guía vertical (APV-l)
16.0 m (52 ft)
20 m (66 ft)
1-2 x 107 Por
aproximación
10 Segundos
1-1x10-6/h En 15
segundos
0.99 A
0.99999
Aproximación que no es de precisión con guía vertical (APV-ll)
16.0 m (52 ft)
8.0 m (26 ft)
1-2 x 107 Por
aproximación
6 Segundos
1-1x10-6/h En 15
segundos
0.99 A
0.99999
Aproximación de precisión de Categoría l (Nota 8)
16.0 m (52 ft)
60 m a 4.0 m (20 a 13 ft)
(Nota 7)
1-2 x 107 Por
aproximación
6 Segundos
1-1x10-6/h En 15
segundos
0.99 A
0.99999
Tabla 3.7.2.4-1. Requisitos de actuación de la señal en el espacio (Anexo 10 vol. I) NOTAS.
1. Los valores de percentil 95 para errores de posición GNSS son los requeridos en las operaciones previstas a la altura mínima por encima del umbral (HAT), de ser aplicable. Se especifican los requisitos detallados en el Apéndice B y se proporcionan textos de orientación en el Adjunto D, 3.2.del Anexo 10 Vol. I
1-1x10-4/h a
1-1x10-8/h
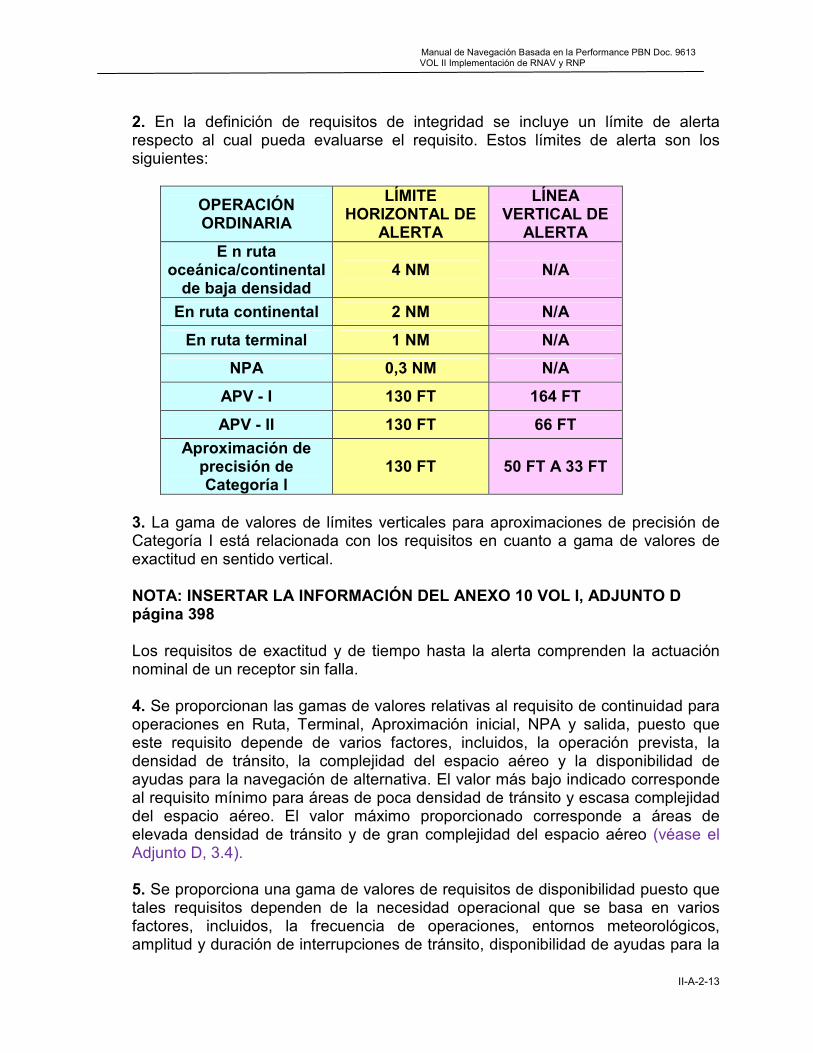
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-2-13
2. En la definición de requisitos de integridad se incluye un límite de alerta respecto al cual pueda evaluarse el requisito. Estos límites de alerta son los siguientes:
OPERACIÓN ORDINARIA
LÍMITE HORIZONTAL DE
ALERTA
LÍNEA VERTICAL DE
ALERTA E n ruta
oceánica/continental de baja densidad
4 NM N/A
En ruta continental 2 NM N/A
En ruta terminal 1 NM N/A
NPA 0,3 NM N/A
APV - I 130 FT 164 FT
APV - II 130 FT 66 FT
Aproximación de precisión de Categoría l
130 FT 50 FT A 33 FT
3. La gama de valores de límites verticales para aproximaciones de precisión de Categoría I está relacionada con los requisitos en cuanto a gama de valores de exactitud en sentido vertical. NOTA: INSERTAR LA INFORMACIÓN DEL ANEXO 10 VOL I, ADJUNTO D página 398 Los requisitos de exactitud y de tiempo hasta la alerta comprenden la actuación nominal de un receptor sin falla. 4. Se proporcionan las gamas de valores relativas al requisito de continuidad para operaciones en Ruta, Terminal, Aproximación inicial, NPA y salida, puesto que este requisito depende de varios factores, incluidos, la operación prevista, la densidad de tránsito, la complejidad del espacio aéreo y la disponibilidad de ayudas para la navegación de alternativa. El valor más bajo indicado corresponde al requisito mínimo para áreas de poca densidad de tránsito y escasa complejidad del espacio aéreo. El valor máximo proporcionado corresponde a áreas de elevada densidad de tránsito y de gran complejidad del espacio aéreo (véase el Adjunto D, 3.4).
5. Se proporciona una gama de valores de requisitos de disponibilidad puesto que tales requisitos dependen de la necesidad operacional que se basa en varios factores, incluidos, la frecuencia de operaciones, entornos meteorológicos, amplitud y duración de interrupciones de tránsito, disponibilidad de ayudas para la
Parte A General Capítulo 2 Vigilancia del Performance y Alerta Abordo
lI-A-2-14
navegación de alternativa, cobertura radar, densidad de tránsito y procedimientos operacionales de inversión. Los valores inferiores indicados corresponden a la disponibilidad mínima respecto a la cual se considera que un sistema es práctico pero inadecuado en sustitución de ayudas para la navegación ajenas al GNSS. Para la navegación en ruta, se proporcionan los valores superiores que bastan para que el GNSS sea la única ayuda de navegación proporcionada en un área. Para la aproximación y la salida, los valores superiores indicados se basan en los requisitos de disponibilidad en los aeropuertos con gran densidad de tránsito, suponiéndose que las operaciones hacia o desde pistas múltiples están afectadas, pero los procedimientos operacionales de inversión garantizan la seguridad de las operaciones (véase el Adjunto D, 3.5). 6. Este requisito es más estricto que la exactitud necesaria para los tipos RNP asociados pero está claramente dentro de los límites de exactitud en cuanto a la actuación que pueden lograrse mediante el GNSS. 7. Se especifica una gama de valores para aproximaciones de precisión de Categoría-I. El requisito de 4,0 m (13 ft) se basa en especificaciones para el ILS y representan una deducción conservadora de estas últimas (véase el Adjunto D, 3.2.7). 8. Están en estudio y se incluirán más tarde los requisitos de actuación del GNSS para operaciones de aproximación de precisión de Categorías II y III. 9. Los términos APV-I y APV-II se refieren a dos niveles de operaciones de aproximación y aterrizaje con guía vertical (APV) por GNSS, y no se prevé necesariamente que estos términos sean utilizados para las operaciones.
II-A-1-1
CAPÍTULO 3
CONSIDERACIONES DE LA EVALUACIÓN DE LA SEGURIDAD
Introducción
Las partes B y C del presente volumen contienen las especificaciones de navegación que se aplican al concepto de espacio aéreo. Cuándo la aplicación de una especificación de navegación, una serie de consideraciones de seguridad deben evaluarse. Los planificadores deben consultar estos Documentos de referencia:
• Manual de gestión de la seguridad (SMM) (Doc. 9859), Capítulo 13, proporciona orientación sobre la realización de evaluaciones de la seguridad.
• Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de separación (Doc. 9689), establece información sobre la cuantificación del efecto de las mínimas de separación que tienen en la seguridad del tránsito aéreo.
• Procedimientos para los servicios de navegación aérea - Operación de aeronaves (PANS-OPS) (Doc. 8168), Volumen II, establece criterios de diseño de rutas ATS y los procedimientos.
• La performance de navegación requerida autorización requerida (RNP AR) Manual de diseño de Procedimientos (Doc. 9905), establece criterios de diseño de procedimientos RNP AR.
• Procedimientos para los servicios de navegación aérea - Gestión del Tránsito Aéreo (PANS-ATM) (Doc. 4444), establece las mínimas de separación.
A continuación se proporciona una visión general de algunas de las características de performance que deben considerarse en la evaluación de la seguridad. Tabla-04 proporciona las referencias a la evaluación de la seguridad de referencia para las especificaciones de navegación en las partes B y C, de este volumen y concluye la sección sobre la evaluación de la seguridad.
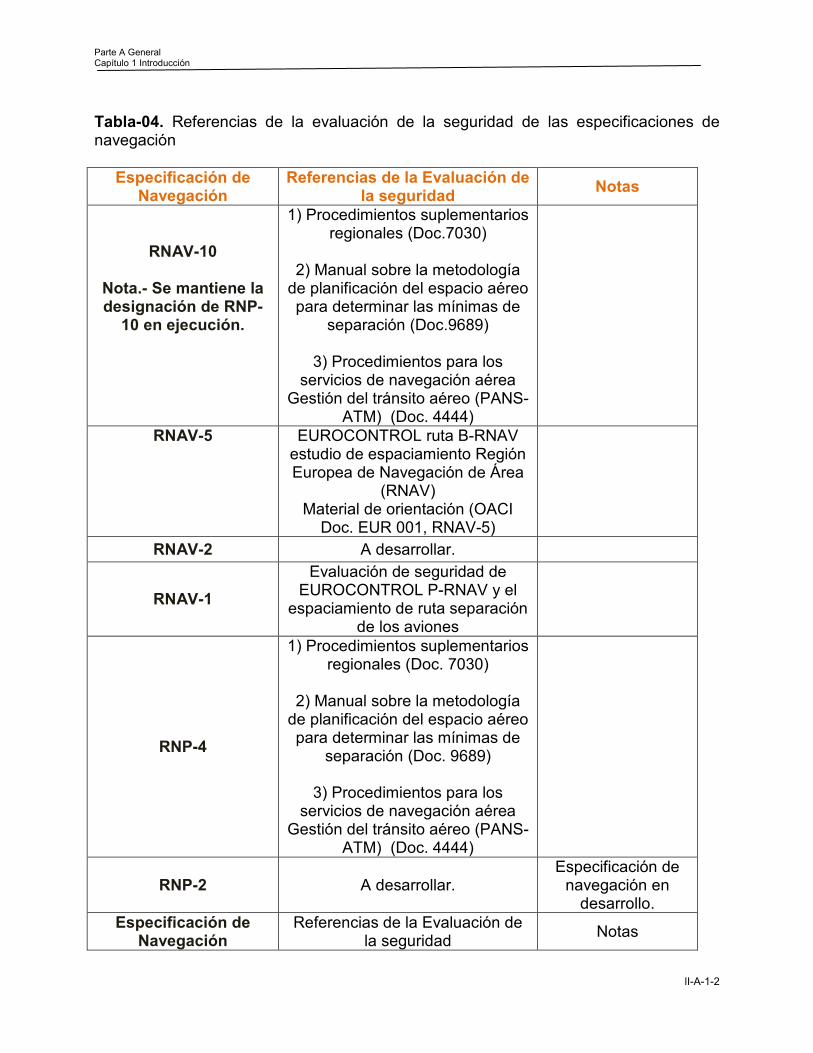
Parte A General Capítulo 1 Introducción
lI-A-1-2
Tabla-04. Referencias de la evaluación de la seguridad de las especificaciones de navegación
Especificación de Navegación
Referencias de la Evaluación de la seguridad
Notas
RNAV-10
Nota.- Se mantiene la designación de RNP-
10 en ejecución.
1) Procedimientos suplementarios regionales (Doc.7030)
2) Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de
separación (Doc.9689)
3) Procedimientos para los servicios de navegación aérea
Gestión del tránsito aéreo (PANS-ATM) (Doc. 4444)
RNAV-5 EUROCONTROL ruta B-RNAV estudio de espaciamiento Región Europea de Navegación de Área
(RNAV) Material de orientación (OACI Doc. EUR 001, RNAV-5)
RNAV-2 A desarrollar.
RNAV-1
Evaluación de seguridad de EUROCONTROL P-RNAV y el espaciamiento de ruta separación
de los aviones
RNP-4
1) Procedimientos suplementarios regionales (Doc. 7030)
2) Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de
separación (Doc. 9689)
3) Procedimientos para los servicios de navegación aérea
Gestión del tránsito aéreo (PANS-ATM) (Doc. 4444)
RNP-2 A desarrollar. Especificación de navegación en desarrollo.
Especificación de Navegación
Referencias de la Evaluación de la seguridad
Notas
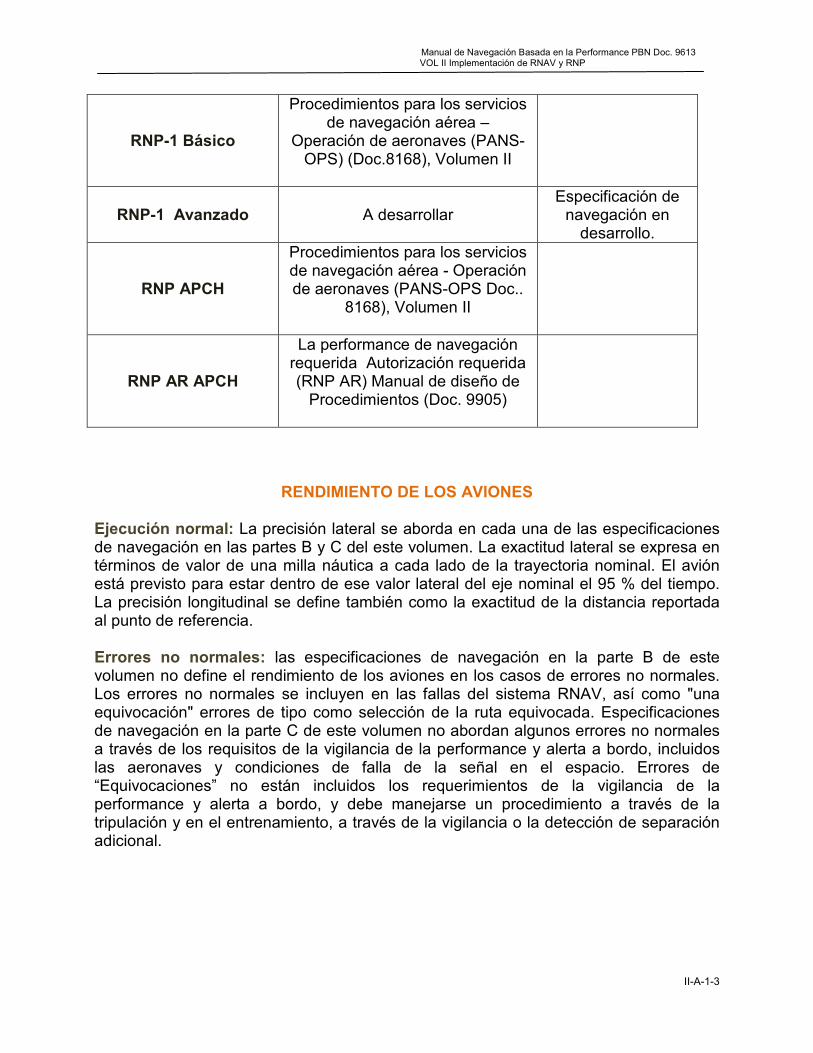
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-1-3
RNP-1 Básico
Procedimientos para los servicios de navegación aérea –
Operación de aeronaves (PANS-OPS) (Doc.8168), Volumen II
RNP-1 Avanzado A desarrollar Especificación de navegación en desarrollo.
RNP APCH
Procedimientos para los servicios de navegación aérea - Operación de aeronaves (PANS-OPS Doc..
8168), Volumen II
RNP AR APCH
La performance de navegación requerida Autorización requerida (RNP AR) Manual de diseño de Procedimientos (Doc. 9905)
RENDIMIENTO DE LOS AVIONES
Ejecución normal: La precisión lateral se aborda en cada una de las especificaciones de navegación en las partes B y C del este volumen. La exactitud lateral se expresa en términos de valor de una milla náutica a cada lado de la trayectoria nominal. El avión está previsto para estar dentro de ese valor lateral del eje nominal el 95 % del tiempo. La precisión longitudinal se define también como la exactitud de la distancia reportada al punto de referencia. Errores no normales: las especificaciones de navegación en la parte B de este volumen no define el rendimiento de los aviones en los casos de errores no normales. Los errores no normales se incluyen en las fallas del sistema RNAV, así como "una equivocación" errores de tipo como selección de la ruta equivocada. Especificaciones de navegación en la parte C de este volumen no abordan algunos errores no normales a través de los requisitos de la vigilancia de la performance y alerta a bordo, incluidos las aeronaves y condiciones de falla de la señal en el espacio. Errores de “Equivocaciones” no están incluidos los requerimientos de la vigilancia de la performance y alerta a bordo, y debe manejarse un procedimiento a través de la tripulación y en el entrenamiento, a través de la vigilancia o la detección de separación adicional.

II-A-3-1
UN FALLO DEL SISTEMA
La evaluación de la seguridad debe tener en cuenta que los aviones que tengan un sistema de navegación único, donde se permite en particular, la especificación de navegación. Mitigaciones potenciales son identificadas por cuenta de la naturaleza de las fallas del sistema de la aeronave, la disponibilidad de otros medios de navegación disponibles en el ambiente CNS ATM. En un entorno de vigilancia, un avión con un fallo de la capacidad de navegación podrían normalmente ser manipulados con éxito por ATC. Donde no hay vigilancia, es necesario tener en cuenta dos situaciones:
1) Falla completa del sistema RNAV, y 2) la posibilidad de que el sistema de navegación de una aeronave tiene un error de posición no declarada. En cualquiera de los dos casos, la mitigación tendrá que ser identificada e incorporados a los procedimientos operativos a fin de aplicar la aplicación de navegación.
El potencial de mitigación dependerá del ambiente de la ATM. Por ejemplo, en el caso de falla completa del sistema de navegación en un avión, donde la aplicación de navegación se lleva a cabo en un entorno con poco tránsito, sin ninguna intención para la futura aplicación de las trayectorias poco espaciadas, la capacidad autónoma de navegación (inercial o derrotas a estima) puede proporcionar reversión suficiente. En los casos en que hay un plan para la aplicación de rutas poco espaciadas, un potencial de mitigación podría ser el aumento de separación de las aeronaves para permitir la operación segura en un ambiente procedimental. En un ambiente de no vigilancia, las especificaciones de navegación RNP abordan la cuestión de los errores de posición no declarada a través de los requisitos de vigilancia de la performance y alerta.
INFRAESTRUCTURA
Ambiente de fallos de las ayudas a la navegación El impacto de fallo de un ambiente de ayudas a la navegación depende de las ayudas a la navegación empleadas para la operación. Para la mayoría de ayudas a la navegación de base terrestre, el número de aeronaves que utilicen una determinada ayuda es normalmente pequeño. Dependiendo del número de ayudas a la navegación disponible, la pérdida de una sola instalación VOR o DME no podrá tener como consecuencia la pérdida de capacidad de posición. El entorno de la infraestructura de ayudas a la navegación y el grado de redundancia de ayudas a la navegación tendrá que ser estudiado específicamente. La capacidad de navegación Inercial también debe ser considerada para la mitigación de una baja densidad de la infraestructura de ayudas a la navegación basadas en tierra.Cuando el GNSS se prevé como la principal o única fuente de posicionamiento, es necesario tener en cuenta el impacto de la pérdida de la capacidad de navegación, no sólo para un avión, pero si para una determinada
Parte A General Capítulo 3 Consideraciones de la Evaluación de la Seguridad
ll-A-3-2
población de aeronaves en un especificado espacio aéreo. El Sistema Mundial de Navegación por Satélite (GNSS) Manual (Doc. 9849) proporciona orientación cuando se piense utilizar el GNSS. En caso de que la vigilancia ATS se propone como la mitigación, la consideración ha de tenerse en cuenta de la aceptabilidad y carga de trabajo del ATC resultante, en caso de una posible pérdida casi simultánea de la capacidad de navegación por un número de aviones. El riesgo de interrupción del GNSS debe considerarse en la evaluación. Si se considera que la probabilidad de una interrupción es inaceptable y la carga de trabajo del ATC no sería aceptable, y por lo tanto, que sólo en la dependencia de vigilancia ATS es inaceptable una solución de mitigación, otra mitigación puede ser un requisito de aeronaves para llevar una alternativa de capacidad de navegación. Un ejemplo podría ser el requisito para llevar una capacidad de navegación inercial. Otras posibles mitigaciones, en función de la especificación de navegación que está siendo implementada, podría ser un requisito de la disponibilidad de una alternativa de entrada de ayudas a la navegación terrestre para dar solución a la posición del Sistema RNAV.
Vigilancia ATS y comunicación Junto con considerar los requisitos de performance de la especificación de navegación prevista para la aplicación, y la disponibilidad de la infraestructura de ayudas a la navegación (tanto para la navegación primaria y la capacidad de reversión de navegación), las contribuciones de la vigilancia ATS y las comunicaciones para lograr el TLS “Nivel de Seguridad perseguido” para un espaciado de ruta, debe ser considerado. La vigilancia ATS y las comunicaciones puede ser examinada para determinar qué errores de mitigación a la navegación se puede esperar para proporcionar. La disponibilidad de vigilancia ATS a lo largo de la ruta es un elemento importante para determinar el espaciamiento de la ruta deseada para la implementación de navegación planeada (es decir, la aplicación de navegación) apoyará el TLS. El importe de la reducción de la capacidad de vigilancia ATS también debe ser considerado. Con la excepción de las especificaciones de navegación aplicadas en espacio aéreo oceánico, continental o remoto, donde puede ser encontrado HF, SATCOM y/o CPDLC, los requisitos de comunicaciones ATS son VHF (voz). En algunos Estados, UHF voz de apoyo a las operaciones militares también está disponible. Además de contar con la disponibilidad de las comunicaciones, la intensidad de recepción de las comunicaciones (señales fuertes o débiles) deben ser consideradas. La eficacia de la intervención ATC en caso de que una aeronave no pueda seguir el eje nominal de la ruta debe ser considerado. En particular, el volumen de trabajo del controlador en un entorno ATC ocupado puede retrasar el reconocimiento de la desviación inaceptable del eje de la ruta más allá del punto donde se mantiene el TLS.
ll-B-1-1
CAPÍTULO 1
APLICACIÓN RNAV-10 (Designada y autorizada como RNP-10)
INTRODUCCIÓN
Antecedentes
En este capítulo se aborda la aplicación del RNP-10 en apoyo a las mínimas de separación basada en distancia de 50 NM laterales y 50 NM longitudinales en espacio aéreo oceánico y/o remoto. Esta guía se ha titulado RNAV-10 de coherencia con los otros capítulos de este manual. Esta designación y la versión de los materiales no cambian los requisitos, y no afectan a los operadores que obtuvieron una autorización para el RNP-10 de su Estado de autoridad reguladora. RNAV-10 no requiere de vigilancia del performance y alerta. Sin embargo, la designación de la aeronavegabilidad y la aprobación operacional, así como la designación del espacio aéreo/ruta sigue siendo "RNP-10" con el fin de mantener las publicaciones actuales y una cantidad de aprobaciones. Reconociendo la magnitud de las denominaciones existentes de espacio aéreo y las aprobaciones operacionales en virtud de la designación RNP-10, se prevé que las nuevas denominaciones del espacio aéreo y las aprobaciones de aeronaves han de seguir utilizando el "RNP-10", mientras que el plazo necesario para la aplicación del PBN sea reconocida como "RNAV-10."
PROPÓSITO En este capítulo se proporciona orientación a los Estados para la aplicación de la RNP-10 en rutas y desarrollo de una RNP-10 en los procesos de aprobación operacional. Este material incluye orientación sobre cuestiones operacionales y de aeronavegabilidad. La información permite a un operador ser aprobado en la forma de cumplir las condiciones. La información permite que un operador al que se aprobó la forma y condiciones de cumplir los requisitos de los elementos de navegación para operaciones RNP-10.También proporciona un medio por el cual un operador puede prolongar cualquier límite de tiempo de aprobación de navegación asociada a la RNP-10. Esta orientación no se ocupa de los detalles de las comunicaciones o vigilancia ATS requisitos que pueden ser especificados para las distintas operaciones. Estos requisitos se especifican en otros Documentos, como las publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-2
(Doc.7030). Si bien las aprobaciones operacionales RNP-10 se refieren principalmente a los requisitos de navegación del espacio aéreo, los operadores y la tripulación de vuelo y se mantiene la obligación de tener en cuenta todos los Documentos relativos al funcionamiento del espacio aéreo, que son requeridos por la autoridad del Estado, antes de realizar los vuelos en ese espacio aéreo.
CONSIDERACIONES ANSP
Infraestructura de ayudas a la navegación
RNP-10 ha sido desarrollado para operar en áreas remotas y oceánicas y no requiere ningún tipo de ayudas a la navegación de base terrestre o evaluación de la infraestructura.
COMUNICACIONES Y VIGILANCIA ATS Esta orientación no se refiere a los requisitos de comunicación o vigilancia ATS, estos pueden ser especificados para operación en particular en una ruta o en un área en particular. Estos requisitos se especifican en otros Documentos, como publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales (Doc. 7030).
FRANQUEAMIENTO DE OBSTÁCULOS Y EL ESPACIAMIENTO DE RUTA Orientaciones detalladas sobre franqueamiento de obstáculos se proporciona en los Procedimientos para los servicios de navegación aérea - Operación de Aeronaves (PANS-OPS Doc. 8168), Volumen II, los criterios generales en las partes I y III. La razón de haber elegido el valor RNP-10 se redujo para soportar los mínimos de separación longitudinal y lateral para su aplicación en áreas oceánicas y remotas, donde la disponibilidad de ayudas a la navegación, las comunicaciones y la vigilancia es limitada. El espaciamiento mínimo en ruta donde se utiliza el RNP-10 es de 50 NM.
CONSIDERACIONES ADICIONALES
Las orientaciones en este capítulo no sustituyen a los requisitos estatales del funcionamiento apropiado de equipo.
PUBLICACIÓN
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-3
En la AIP se debería indicar claramente que la aplicación de navegación es la RNP-10, cuando se hace referencia a las rutas existentes. La ruta debe identificar el segmento mínimo de requisitos de altitud. Los datos de navegación publicados en el AIP del Estado respectivo para las rutas y apoyo a las ayudas de navegación deberán cumplir los requisitos del Anexo 15 - Servicios de información aeronáutica. Todas las rutas deben basarse en las coordenadas WGS-84.
LA FORMACIÓN DE CONTROLADOR DE TRÁNSITO AÉREO Se recomienda que los controladores de control de tránsito aéreo proporcionen servicio de control en el espacio aéreo donde se haya implementado el RNAV-10 y debe haber completado la formación en las siguientes áreas: Capacitación Básica
a) ¿Cómo trabajan los sistemas de navegación área (en el contexto de esta especificación de navegación):
� Incluyendo la capacidad funcional y las limitaciones de esta especificación de navegación;
� la precisión, integridad, disponibilidad y continuidad;
� el receptor GPS, RAIM, FDE, la integridad y las alertas;
b) requisitos del plan de vuelo;
c) los procedimientos de ATC:
� procedimientos de contingencia ATC;
� las mínimas de separación;
� ambiente de equipo mixto (impacto de sintonización manual del VOR);
� la transición entre los distintos entornos operativos, y
� la fraseología.
Entrenamiento específico de una especificación de navegación
• Presentación de informes de GNEs (errores crasos de navegación).
ESTADO DE LA VIGILANCIA
La infraestructura de ayudas a la navegación soporta la actualización de radio navegación antes de la entrada en el espacio aéreo RNP-10 deben ser monitoreados y mantenidos las advertencias oportunas de los cortes y deben expedirse (NOTAM).
SISTEMA DE VIGILANCIA ATS
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-4
Demostrada la precisión de navegación que provee un parámetro principal para determinar el espaciamiento lateral de una ruta y la separación mínima necesaria de tránsito para que operen en una determinada ruta. En consecuencia, los errores de navegación lateral y longitudinal son monitoreados (por ejemplo, mediante programas de vigilancia que utilizan los informes de errores de navegación oceánica, informes de desviación de altitud oceánico o los informes de errores de navegación), y luego investigado para evitar que se repitan. Las observaciones por radar de cada uno de los aviones de la proximidad a la trayectoria nominal y la altitud, antes de entrar en la cobertura de ayudas a la navegación de corto alcance al final del segmento de ruta oceánica, suelen ser observados por los servicios ATS. Si una observación indica que una aeronave no se encuentra dentro del límite establecido, el motivo de la aparente desviación de ruta o de la altitud puede tener que ser determinado y las medidas adoptadas para prevenir una recurrencia. Además, es una condición de la aprobación que los pilotos y operadores comunicarán a la autoridad reguladora competente de cualquiera de los siguientes errores:
� Errores de navegación lateral 15 NM o más;
� Errores de navegación longitudinal de 10 NM o más;
� Errores de navegación longitudinal de 3 minutos o más, variación entre la hora estimada de llegada de la aeronave a un punto de notificación y el tiempo real de su llegada, y
� Fallos en el sistema de navegación.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes
Esta sección identifica los requisitos operacionales y de aeronavegabilidad para las operaciones RNP-10 el cumplimiento operativo de estos requisitos debe ser abordado a través de reglamentos operativos nacionales, y pueden requerir de una autorización operacional específica en algunos casos. Por ejemplo, algunos Estados exigen a los operadores a aplicar su autoridad nacional (Estado del operador/registro) para la aprobación operacional. En este capítulo se aborda sólo la parte del sistema de navegación lateral. En los Estados Unidos el Departamento de Transporte a través de la FAA publicó la Orden 8400.12 - Rendimiento de navegación requerida 10 (RNP-10) Aprobación operacional del 24 de enero de 1997. Basados en los comentarios recibidos de los operadores, Los Estados y las autoridades reguladoras y de la aviación, una nueva versión, 8400.12A, se publicó el 9 de febrero de 1998. Posteriormente, EASA emitió la "AMC 20-12 en Reconocimiento de la Orden de FAA 8400.12A para operaciones RNP-10 " para los operadores europeos. La Autoridad de Seguridad de Aviación Civil (CASA)
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-5
de Australia, en coordinación con los Estados Unidos, uso la orden FAA 8400.12A (modificada) para desarrollar la Publicación de Asesoramiento de aviación civil (CAAP) RNP-10-1, que detalla el proceso de aprobación de operadores de Australia. Esta ha sido sustituida por la Circular Consultiva (AC) 91U-2 (0). El material de orientación de la OACI fue originalmente publicado por la OACI mediante el Doc. 9613, Apéndice E, y se ha actualizado e incluido en este manual. Proceso de aprobación Esta especificación de navegación no constituye en sí misma reglamentación de orientación para la cual las aeronaves y operadores será evaluados y aprobados. Las aeronaves están certificadas por el Estado del fabricante. Los operadores son aprobados de conformidad con las normas de funcionamiento. La especificación de navegación proporciona la técnica y los criterios operativos, y no implica la necesidad de re certificación. Los siguientes pasos deben ser completados antes de realizar operaciones RNP-10:
a) la elegibilidad de equipos de a bordo deberá ser determinada y Documentada;
b) los procedimientos operativos para el sistema de navegación que serán usados y los procesos de base de datos de navegación del operador deben estar debidamente Documentados;
c) El entrenamiento o formación de la tripulación de vuelo sobre la base de los procedimientos operativos deben estar Documentados, si es necesario;
d) el citado material deberá ser aceptado por la autoridad reguladora del Estado, y
e) la aprobación operacional debe ser obtenida de conformidad con las normas de operación.
CONTENIDO DE UNA SOLICITUD DE APROBACIÓN OPERACIONAL RNP-10
Elegibilidad de Aeronaves Muchas aeronaves y sistemas de navegación actualmente en uso de operaciones en áreas oceánicas y/o remotas califican para RNP-10 sobre la base de una o más disposiciones de los actuales criterios de certificación. Por lo tanto, la certificación adicional de aeronaves, acción que puede no ser necesaria para la mayoría de las aprobaciones operacionales RNP-10. Certificaciones adicionales de aeronaves sólo será necesario si el operador elige reclamar un rendimiento adicional más allá del que originalmente se indica en el certificado o manual de vuelo de la aeronave, pero no pueden demostrar el rendimiento a través de la recopilación de datos. Tres métodos para determinar la elegibilidad de aeronaves se han definido.
Método 1 - certificación RNP
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-6
Puede ser utilizado para aprobar las aeronaves que han sido oficialmente certificadas y aprobadas para operaciones RNP. El cumplimiento RNP está Documentado en el manual de vuelo y por lo general no se limita a RNP-10. El manual de vuelo direcciona los niveles RNP que se han demostrado para cumplir los criterios de certificación y las disposiciones conexas aplicables a su uso (por ejemplo, requisitos de sensores de ayudas a la navegación). La aprobación operativa se basará en el rendimiento que se indica en el manual de vuelo. La aprobación de aeronavegabilidad que tratan específicamente el rendimiento RNP-10 puede ser obtenida. Ejemplo de redacción que podría utilizarse en el manual de vuelo, cuando una aprobación RNP-10 se concede por un cambio en el rendimiento INS/IRU certificada, es la siguiente: El sistema de navegación “XXX” se ha demostrado que cumplen los criterios del [Documento de orientación del Estado] como uno de los principales medios de navegación para vuelos de hasta YYY horas de duración sin actualizar. La determinación de la duración del vuelo se inicia cuando el sistema se encuentra en modo de navegación. Para los vuelos que incluyen la actualización de la posición de navegación a bordo, el operador debe abordar el efecto que tiene la precisión sobre la actualización de la posición, y cualquier límite de tiempo asociado para las operaciones RNP correspondiente a la actualización de instalaciones de ayudas a la navegación y facilidades usadas en el área, rutas o procedimientos a volar. La demostración de los resultados de conformidad con las disposiciones del (Documento de orientación del Estado) no constituye una aprobación para llevar a cabo las operaciones RNP. " Nota.- El texto anterior se basa en la aprobación del performance de la autoridad de aviación y es sólo un elemento del proceso de aprobación. Los aviones con esta redacción en su manual de vuelo serán elegibles para su aprobación a través de la publicación de las operaciones o las especificaciones de una Carta de Aprobación (LOA), si todos los demás criterios se cumplen. Las horas “YYY” especificadas en el manual de vuelo no incluyen la actualización. Cuando el operador se propone un crédito para la actualización, la propuesta debe abordar el efecto de la actualización sobre la exactitud de la posición y cualquier límite de tiempo asociado con las operaciones RNP pertinentes para la actualización de las instalaciones o ayudas a la navegación utilizadas en la zona, rutas o procedimientos a volar. Método 2 - Elegibilidad de aeronaves antes de la certificación de sistemas de navegación El método 2 puede ser utilizado para aprobar las aeronaves cuyo nivel de rendimiento, bajo otras / normas previas, se puede equiparar a los criterios RNP-
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-7
10. Las normas enumeradas en (Requisitos de las Aeronaves) se pueden utilizar para satisfacer los requisitos de una aeronave. Otras normas también pueden ser utilizadas si son suficientes para garantizar que se cumplan los requisitos RNP-10. Si las demás normas se van a utilizar, el solicitante debe proponer un medio aceptable de cumplimiento.
Método 3 - Elegibilidad de aeronaves a través de la recopilación de datos El método 3 requiere que los operadores recojan datos para obtener una aprobación RNP-10 durante un período determinado de tiempo. El programa de recolección de datos deben tener en cuenta las necesidades de precisión de navegación RNP-10. La recolección datos deberá garantizar que el solicitante demuestre a la autoridad de aviación de que la aeronave y el sistema de navegación proporcionan a la tripulación de vuelo conocimiento de la situación de navegación de la relativa ruta RNP-10 La recolección de datos también debe asegurarse una comprensión clara de la situación del sistema de navegación que está disponible y que el hecho de no indicaciones, los procedimientos son compatibles con el mantenimiento de la performance de navegación requerida. La recopilación de datos también debe asegurar que una comprensión clara de la situación del sistema de navegación está previsto y que las indicaciones de falla y los procedimientos sean consistentes con el mantenimiento de la performance de navegación requerida.
Hay dos métodos de recopilación de datos del Método 3:
a) El método secuencial es un programa de recolección de datos que se ajusta a las normas de la Orden FAA 8400.12A (modificado), Apéndice 1. Este método permite al operador recoger un conjunto de datos y parcelarlos en gráficos para determinar si el sistema de navegación de las aeronaves reunirá los requisitos RNP-10 para la longitud de tiempo necesario por el operador, y
b) El método periódico de recolección de datos usando un receptor GNSS de mano como base de referencia para recoger datos de sistema de navegación inercial (INS) (como se describe en la Orden FAA 8400.12 A (modificada), apéndice 6 (Método periódico). Los datos recogidos son analizados como se describe en el Apéndice 6 para determinar si el sistema es capaz de mantener el rendimiento de RNP-10 para la longitud del tiempo necesario requerida por el operador.
La Documentación pertinente para el método de calificación debe estar disponible para establecer que la aeronave está equipada con sistemas de navegación de larga distancia (LRNSs) que cumplan con los requisitos de la RNP-10 (por ejemplo, el manual de vuelo). El solicitante debe proporcionar una lista de configuración de los detalles pertinentes de los componentes y equipos que se utilizarán para la navegación de largo alcance y operaciones RNP-10.
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-8
El límite de tiempo propuesto por el solicitante para RNP-10 especificando el INS o IRU debe ser proporcionada. El solicitante debe tener en cuenta el efecto de viento de frente en el área en la cual se llevan a cabo operaciones RNP-10 (véase requerimientos de las aeronaves) para determinar la viabilidad de la operación propuesta. La aprobación operacional La evaluación de un operador en particular se hace por el Estado del operador/ Registro del operador y de conformidad con las normas de funcionamiento nacionales (por ejemplo, los JAR-OPS 1, 14 CFR Parte 121) el apoyo a través de asesoramiento y orientación. La evaluación debería tener en cuenta:
a) pruebas de la elegibilidad de las aeronaves;
b) la evaluación de los procedimientos operativos para los sistemas de navegación a ser usados;
c) el control de esos procedimientos aceptables a través de entradas en el manual de operaciones; la identificación de los requisitos del la formación la tripulación de vuelo, y
d) en caso necesario, el control de procesos de base de datos navegación
La aprobación operacional serán Documentados a través del certificado de operador aéreo (AOC) del Estado que la aprobó, mediante la emisión de una Carta de Autorización, una especificación de las operaciones (especificaciones OPS) o de una enmienda al manual de operaciones. Descripción del equipo de la aeronave El operador deberá disponer de una lista detalla de la configuración de los componentes y los equipos pertinentes que se utilizarán para operaciones RNP-10. Documentación de Entrenamiento Los operadores comerciales deben tener un programa de entrenamiento para abordar las prácticas operacionales, procedimientos y temas relacionados con el entrenamiento de operaciones RNP-10 (por ejemplo inicial, actualización o entrenamiento periódico para la tripulación de vuelo, despachadores o personal de mantenimiento). Nota.- No es necesario establecer un programa de entrenamiento por separado o régimen de formación en RNAV si ya es un elemento del programa de formación. Sin embargo, debería ser posible identificar qué aspectos de la RNAV están cubiertos dentro de un programa de formación. Los operadores no comerciales deben estar familiarizados con las prácticas y procedimientos identificados en " conocimientos piloto y entrenamiento ». Operaciones manuales y listas de comprobación
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-9
Operaciones manuales y listas de comprobación para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos normalizados de operación detallado en "Procedimientos de Operación". Los manuales apropiados deben contener instrucciones operacionales de navegación y procedimientos de contingencia si se especifica. Los Manuales y listas de comprobación deben ser sometidos a examen como parte del proceso de solicitud. Los operadores privados deben operar utilizando las prácticas y procedimientos identificados en " conocimiento del piloto y entrenamiento ». Consideraciones de la Lista de equipo mínimo (MEL) Cualquier revisión necesaria al MEL para hacer frente a RNP-10 debe ser aprobada. Los operadores deben ajustar el MEL, o equivalente, y especificar las condiciones de ejecución. Todos los operadores deben tener establecido un programa de mantenimiento de cada uno de los sistemas de navegación. Para otras instalaciones, el operador debe presentar algún cambio en su actual manual de mantenimiento para su revisión y aceptabilidad. Rendimiento Anterior Una historia de operaciones del operador debe ser incluido en la solicitud. El solicitante debe hacer frente a acontecimientos o incidentes relacionados con errores de navegación para que el operador (por ejemplo, como se informó al Estado en el formulario de investigación de error de navegación), que han sido cubiertos por el entrenamiento, los procedimientos, y el mantenimiento, modificaciones de la aeronave o del sistema de navegación que se van a utilizar.
REQUISITOS DE LAS AERONAVES El RNP-10 exige que las aeronaves que operan en áreas oceánicas y remotas estén equipadas con al menos dos sistemas LRNSs independientes y al servicio este comprende un INS, un IRS FMS o un GNSS, con una integridad tal que el sistema de navegación no proporcione una probabilidad inaceptable de información engañosa. Rendimiento del sistema, Monitoreo y la alerta Precisión: Durante las operaciones en espacio aéreo o en rutas designadas como RNP-10, el error lateral del sistema total debe estar dentro ± 10 NM al menos el 95 % del total de tiempo de vuelo. El error a lo largo de la trayectoria de también debe estar dentro de ± 10 NM al menos el 95 por ciento del total de tiempo de vuelo. Nota 1 - En cuanto a la RNP-10, la aprobación operacional de las aeronaves capaces de acoplar el sistema de navegación de Área (RNAV) con el director de vuelo o piloto automático, un error de posicionamiento de navegación se considera el principal contribuyente del error perpendicular a la trayectoria (XTT) y a lo largo de la trayectoria
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-10
(ATT). EL error técnico de vuelo (FTE), definición de error de la trayectoria (PDE) y los errores en el monitor (Display) se consideran insignificantes para los efectos de la aprobación RNP-10. Nota 2- Cuando el método de recopilación de datos descrito en el apéndice 1 de la Orden FAA 8400.12A (enmendada) se utiliza como base para una aprobación operacional RNP-10, estos tipos de errores se incluyen en el análisis. Sin embargo, cuando el método de colección de los datos descrito en el Apéndice 6 de la Orden FAA 8400.12A se utiliza, estos errores no están incluidos ya que el método es más conservador. El método del Apéndice 6 utiliza el error radial en lugar de error perpendicular y a lo largo de la trayectoria. Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como una falla mayor en virtud de la condición de las regulaciones de aeronavegabilidad (es decir, 10-5 por hora). Continuidad: La pérdida de la función está clasificada como una falla mayor condición para la navegación oceánica y remota. El requisito de continuidad se cumple por llevar equipo doble LRNSs independiente (con exclusión de la señal en el espacio). Señal en el espacio: Si se está utilizando el GNSS, el equipo de navegación de la aeronave deberá presentar un aviso si la probabilidad de error de la señal en el espacio causa un error de posición lateral superior a 20 NM y supera 10-7 por hora (Anexo 10, Volumen I, Tabla 3.7.2.4-1).
CRITERIOS ESPECÍFICOS PARA LOS SERVICIOS DE NAVEGACIÓN La incorporación de GNSS doble en aeronaves Las aeronaves autorizadas para utilizar los GNSS como medio principal de navegación para operaciones oceánicas y remotas, de conformidad con los requisitos de la autoridad de aviación, también cumplen los requisitos RNP-10 sin limitaciones de tiempo. La integración de sistemas Multi-sensor GNSS con FDE son aprobadas usando las orientaciones contenidas en la Circular Asesora AC 20-130A FAA de los Estados Unidos, o su equivalente, también cumplen los requisitos RNP-10 sin limitaciones de tiempo. En la Circular Asesora AC 20-138A FAA proporciona un medio aceptable de cumplimiento con los requisitos de instalación para las aeronaves que utilizan GNSS pero que no se integra con otros sensores. La circular AC 20-130A FAA describe un medio aceptable de cumplimiento de sensores múltiples que incorporan sistemas de navegación GNSS. Las aeronaves que tienen la intención de usar GNSS como el sistema único de navegación (por ejemplo, no INS o IRS) en las rutas RNP-10 o en espacio aéreo RNP-10 también deben cumplir con la normativa de asesoramiento relacionada con la Documentación pertinente de la autoridad de aviación, con
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-11
excepción de los requisitos específicos del GNSS descritos en este material de orientación. Esto incluye la utilización de los GNSS aprobado para el rendimiento primario oceánico / remoto. El manual de vuelo debe indicar que una instalación GNSS cumple con los requisitos de la autoridad de aviación. Equipo GNSS doble aprobado bajo la TSO deberá estar provisto de un programa de predicción de la disponibilidad FDE y se debe utilizar. El tiempo máximo permitido para los que cuenta con la capacidad FDE se prevé que no estará disponible por 34 minutos para cualquier ocasión. El tiempo máximo de interrupción debe ser incluida como condición de las aprobaciones RNP-10. Nota.- Si las predicciones indican que el tiempo máximo de interrupción FDE para la operación RNP-10 se excedió, entonces la operación debe ser reprogramada cuando la función FDE esté disponible, o el RNP-10 debe basarse en un alternativa para la navegación. La incorporación de dos sistemas de navegación inercial (INS) en la aeronave o unidades de referencia inercial (IRU) - tiempo límite normalizado Las aeronaves equipadas con doble INS o IRU sistemas aprobados de conformidad con cualquiera de las siguientes normas se han determinado para cumplir con los requisitos para RNP-10 hasta 6,2 horas de tiempo de vuelo: Estados Unidos 14 CFR, Parte 121, Apéndice G (o un equivalente del Estado); Especificaciones mínimas de navegación (MNPS), y Aprobados para las operaciones RNAV en Australia. La medida de tiempo comienza a partir de cuando los sistemas se ponen en modo de navegación o en el último punto en el que los sistemas están actualizados. Nota.-Las 6,2 horas de tiempo de vuelo se basan en un sistema inercial con un 95 por ciento de tasa de error de posición radial (tasa de error circular) de 2,0 NM/h, que es estadísticamente equivalente al 95 por ciento de las tasas de error de posición perpendicular a la trayectoria y a lo largo de la trayectoria (índices de error ortogonal) de 1,6015 NM/h cada uno, y el 95 por ciento perpendicular a la trayectoria y el 95 por ciento a lo largo de la trayectoria límites de error de posición de 10 MN cada uno (por ejemplo, 10 NM / 1,6015 MN / h = 6,2 horas)). Si los sistemas se actualizan en ruta, el operador deberá mostrar el efecto que la precisión de la actualización tiene sobre el tiempo límite (véase la Orden FAA 8400.12.A, párrafo 12.e para obtener información sobre los factores de ajuste para los sistemas que se actualizan en ruta). Nota.- Orden FAA 8400.12.A párrafo 12.d proporciona información sobre los procedimientos aceptables para los operadores que desean incrementar las 6.2 horas de limite del tiempo especificado.
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-12
La incorporación de dos sistemas de navegación inercial (INS) en la aeronave o unidades de referencia inercial (IRU) - el límite de tiempo extendido Para aeronaves con INS certificados bajo la 14 CFR Parte 121, Apéndice G, de los Estados Unidos, es sólo una certificación adicional necesarias para que los operadores que opten por el INS para certificar la mejor exactitud de 2 NM por hora de error radial 1,6015 MN por hora de error perpendicular a la trayectoria. Sin embargo, se aplicarán las siguientes condiciones:
a) la certificación de rendimiento del INS debe abordar todas las cuestiones relacionadas con el mantenimiento de la precisión requerida, como la exactitud y la fiabilidad, la aceptación de los procedimientos de prueba, procedimientos de mantenimiento y programas de formación, y
b) el operador deberá determinar la norma contra la cual el rendimiento del INS debe demostrarse. Esta norma puede ser una regulación (ejemplo, el anexo G), una especificación de la industria o un operador único. Una declaración deberá se añadida en el manual de vuelo para determinar la exactitud estándar utilizada para la certificación (véase la Orden FAA 8400.12.A, apartado 12.a.2).
Aeronaves equipadas con un único INS o IRU y un único GPS aprobado como medio primario de navegación en áreas oceánicas y remotas Aeronaves equipadas con un único INS o IRU y un solo GNSS que cumplen los requisitos de RNP-10, sin limitaciones de tiempo. El INS o IRU deben ser aprobados bajo la 14 CFR, Parte 121, Apéndice G. El GNSS deberá ser autorizado bajo la norma TSO-C129a y debe tener un programa de predicción de la disponibilidad FDE. El tiempo máximo permitido para que la capacidad FDE se prevea que no estará disponible es de 34 minutos en cada ocasión. El tiempo máximo de interrupción debe ser incluido como condición de la aprobación RNP-10. El manual de vuelo debe indicar que la instalación INS, IRU o GPS debe cumplir las exigencias de la autoridad de aviación.
PROCEDIMIENTOS OPERATIVOS Para satisfacer los requisitos de operaciones RNP-10 en áreas oceánicas y remotas, el operador deberá cumplir también los requisitos pertinentes del Anexo 2 - Reglamento del Aire.
La planificación de los vuelos Durante la planificación de los vuelos, la tripulación de vuelo debería prestar especial atención a las condiciones que afectan las operaciones en RNP-10 espacio aéreo (o en las rutas RNP-10), incluyendo:
a) verificar que el tiempo límite RNP-10 han sido tenidos en cuenta;
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-13
b) la verificación de los requisitos para el GNSS, como el FDE, en su caso, para la operación, y
c) considerar cualquier restricción operativa relacionada con la aprobación RNP-10, si es necesario para un sistema de navegación especifico.
Procedimientos de pre-vuelo Las siguientes acciones deben completarse durante el proceso de pre-vuelo:
a) revisar los registros de mantenimiento y las formas para determinar el estado de los equipos necesarios para el vuelo en RNP-10 en determinado espacio aéreo o en una ruta RNP-10. Asegurarse de que en el mantenimiento se han tomado medidas para corregir defectos en la equipo necesario;
b) durante la inspección externa del avión, si es posible comprobar el estado de las antenas de navegación y la condición de la piel del fuselaje en las cercanías de cada una de estas antenas (este control puede efectuarse mediante una persona cualificada y autorizada que no sea el piloto, por ejemplo, un ingeniero de vuelo o personal de mantenimiento), y
c) revisar los procedimientos de emergencia para las operaciones en espacio aéreo RNP-10 o rutas RNP-10. Estos no son diferentes de los procedimientos oceánicos normales de emergencia con una excepción - las tripulaciones deben ser capaces de reconocer cuando el avión ya no es capaz de navegar su aprobación de capacidad RNP-10 y el ATC debe estar informado.
EQUIPO DE NAVEGACIÓN
Todas las aeronaves que operan en RNP-10 en espacio aéreo oceánico y remoto deben ser equipadas con dos LRNSs independientes y completamente servibles con la integridad de tal manera que el sistema de navegación no ofrezca información engañosa. A la autoridad del Estado podrá aprobar la utilización de una única LRNS en circunstancias específicas (por ejemplo, del Atlántico Norte MNPS y 14 CFR 121,351 (c) se refieren). Una aprobación RNP-10 sigue siendo requerida.
DESIGNACIÓN PLAN DE VUELO Los operadores deben utilizar el plan de vuelo OACI apropiado especificado para la designación RNP de la ruta a volar. La letra "R" debe ser colocada en la casilla 10 del plan de vuelo para indicar que el piloto ha revisado la ruta planeada de vuelo y para determinar que los requisitos RNP de la aeronave y el operador han sido aprobados en las rutas donde la RNP es un requisito para la operación. La Información adicional necesaria que se mostrará en la sección de observaciones que indica la capacidad de precisión, RNP-10, versus RNP-4.
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-14
DISPONIBILIDAD DE AYUDAS A LA NAVEGACIÓN En la ejecución o durante la planificación de los vuelos, el operador deberá garantizar que existen ayudas a la navegación adecuadas y disponibles en la ruta para permitir que el avión pueda navegar la RNP-10 para la duración de la operación RNP-10 planeada Para los sistemas GNSS, el operador debe garantizar que durante la ejecución o la planificación de los vuelos la adecuada capacidad de navegación esté disponible en la ruta para que la aeronave navegue la RNP-10, incluida la disponibilidad FDE, en su caso para la operación, si es apropiada para la operación
EN RUTA Al menos dos LRNSs capaces de satisfacer esta especificación de navegación deberá estar operativa en el punto de entrada del espacio aéreo oceánico. Si este no es el caso, entonces el piloto debe considerar una ruta alternativa que no requiere de un equipo en particular o tiene que hacer un desvío para las reparaciones. Antes de entrar en el espacio aéreo oceánico, la posición de la aeronave debe verificarse con la mayor precisión posible utilizando ayudas a la navegación externas. Esto puede requerir chequeos DME/DME y/o VOR para determinar los errores del sistema de navegación a través de posiciones reales mostradas en pantalla. Si el sistema debe ser actualizado, los procedimientos deben seguirse con la ayuda de una lista de chequeo preparada. El operador de vuelos que operan en los ejercicios obligatorios, transculturales debe incluir procedimientos de control para identificar la navegación errores en un plazo suficiente para evitar la desviación involuntaria de los aviones de ATC-limpiado rutas. Los operadores deben incluir procedimientos obligatorios de chequeo cruzado para identificar errores de navegación con tiempo suficiente para evitar desviaciones inadvertidas de las aeronaves que vuelan por rutas autorizadas por el ATC. La tripulación deberá informar al ATC de cualquier deterioro o fallo de los equipos de navegación por debajo de los requisitos de rendimiento de navegación o de cualquier desviación requerida para un procedimiento de contingencia. Los pilotos deben utilizar un indicador de desviación lateral, director de vuelo, o piloto automático en modo de navegación lateral para operaciones RNP-10. Todos los pilotos están prevenidos para mantener el eje central de la ruta, como describe los indicadores de desviación lateral a bordo y/o de guiado de vuelo, durante todas las operaciones RNP que se describen en este manual a menos que sea autorizado por el ATC para desviarse o bajo condiciones de emergencia. Para las operaciones normales, la desviación del error perpendicular a la derrota (la diferencia entre la trayectoria calculada del sistema RNAV y la posición relativa de la aeronave en relación con la trayectoria) debe limitarse a ± ½ de la precisión de la navegación asociada con la ruta
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-15
(es decir, 5 NM). Breve desviaciones de esta norma (por ejemplo, un rebasamiento undershoots) durante e inmediatamente después de los virajes de ruta, hasta un máximo de una vez la precisión de la navegación (es decir, 10 NM), son admisibles Nota- Algunos aviones no muestran o calculan una ruta durante los virajes. Los pilotos de estos aviones no pueden ser capaces de adherirse a ± ½ la exactitud durante los virajes de ruta, pero aún se espera que cumplan la norma durante la intersección siguientes virajes y en segmentos rectos. Evaluación de la ruta para el RNP-10 tiempo límite para aviones equipados solamente con INS o IRU Un tiempo límite de RNP-10 debe establecerse sólo para las aeronaves equipadas con INS o IRU. La hora de planificar operaciones en las áreas donde se aplica la RNP-10, el operador deberá establecer que la aeronave cumple con la limitación de tiempo en las rutas que tiene la intención de volar. Al hacer esta evaluación, el operador debe tener en cuenta el efecto de viento de frente y, para las aeronaves que no sean capaces de acoplar el sistema de navegación o director de vuelo al piloto automático, el operador podrá optar por hacer esta evaluación una sola vez o en una base por vuelo. El operador debe considerar los puntos que figuran en las siguientes subsecciones para hacer esta evaluación. Evaluación de la ruta El operador deberá establecer la capacidad de las aeronaves para satisfacer la RNP-10 el límite de tiempo establecido para su ejecución de salida o dentro de espacio aéreo RNP-10. Punto de inicio para el cálculo El cálculo debe comenzar en el punto en que el sistema se encuentra en modo de navegación o el último punto en el que se espera que el sistema se actualice. Punto de parada para el cálculo El punto puede dejar de ser uno de los siguientes:
a) el punto en el que la aeronave comenzará a navegar por referencia a la de la ayudas a la navegación normalizadas de OACI (VOR, DME, NDB) y/o está bajo la vigilancia de ATC, o
b) el primer punto en el que el sistema de navegación se espera que sea actualizado.
Fuentes de datos de las componentes de viento
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-16
Las componentes de viento frontales al ser consideradas para la ruta pueden ser obtenidas de cualquier fuente aceptable por la autoridad de aviación. Fuentes aceptable para de datos de viento incluye: Oficina de Meteorología del Estado, Servicio Meteorológico Nacional, Bracknell, fuentes de la industria como Boeing Vientos del mundo en rutas aéreas, y los datos históricos facilitados por el operador. Una sola vez la base de cálculo sobre el 75 por ciento de probabilidad de componentes viento Ciertas fuentes de datos de viento establecen la probabilidad de experimentar una determinada componente de viento en rutas entre un par de ciudades sobre una base anual. Si el operador opta por hacer un cálculo en tiempo de la RNP-10 de cumplimiento de límite de tiempo, el operador podrá utilizar el 75 por ciento de nivel de probabilidad anual para calcular el efecto de viento frontal (este nivel ha sido encontrado ser una estimación razonable de las componentes del viento). Cálculo del límite de tiempo para cada vuelo especifico El operador puede elegir para evaluar cada vuelo individual utilizando los vientos del plan de vuelo para determinar si la aeronave cumple con el límite de tiempo especificado. Si se determina que el límite de tiempo será excedido, luego, la aeronave debe volar una ruta alterna o retrasar el vuelo hasta el tiempo límite si pueden ser satisfechas. Esta evaluación es una planificación de vuelo o tarea de ejecución. Efecto de las actualizaciones en ruta Los operadores podrán ampliar el tiempo de la capacidad de actualización de navegación RNP-10. Aprobaciones para diversos procedimientos de actualización son basadas en la referencia para los cuales han sido aprobados menos los factores de tiempo que se muestran a continuación:
a) actualización automática usando DME/DME = menos de 0,3 horas de referencia (por ejemplo, una aeronave que ha sido aprobado para 6,2 horas puede ganar 5.9 horas después de una actualización automática DME/DME,);
b) actualización automática usando DME/DME/ VOR = menos 0,5 horas de referencia, y
c) actualización manual utilizando un método similar al que figura en la Orden FAA 8400.12A (modificada), o el apéndice 7 aprobado por la autoridad aeronáutica = menos 1 hora de referencia.
Actualización automática de la posición por radio
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-17
La actualización automática es cualquier procedimiento de actualización que no requiere que la tripulación de vuelo inserte manualmente las coordenadas. La actualización automática es aceptable a condición de que:
a) los procedimientos de actualización automática se incluyen en un programa de entrenamiento del operador, y
b) las tripulaciones de vuelo son conocedores de los procedimientos de actualización y de los efectos de la actualización en la solución de navegación.
Un procedimiento aceptable para la actualización automática puede ser utilizado como base para una aprobación RNP-10 para un tiempo extendido como se indica por los datos presentados a la autoridad de aviación. Estos datos deberán presentar una clara indicación de la exactitud de la actualización y el efecto de la actualización sobre la capacidad de navegación para el resto del vuelo. Actualización manual de la posición de radio Si la actualización manual no está específicamente aprobada, actualizaciones manuales de la posición no están permitidas en las operaciones RNP-10. La actualización manual puede ser considerada aceptable para las operaciones en espacio aéreo donde el RNP-10 se aplica siempre que:
a) Los procedimientos para la actualización manual son revisados por la autoridad aeronáutica, en un caso por caso. Un procedimiento aceptable para la actualización manual se describe en la Orden FAA 8400.12A (modificada), y el apéndice 7 puede ser utilizado como la base para una aprobación RNP-10 por un tiempo extendido cuando están apoyados por datos aceptables.
b) Los operadores ponen de manifiesto que sus procedimientos de actualización y entrenamiento incluyen medidas para realizar una comprobación cruzada para prevenir los errores de factor humano y el programa de cualificación de la tripulación de vuelo se encuentra de forma efectiva y el entrenamiento de pilotos, y
c) el operador proporciona datos que permitan establecer la exactitud con la que el sistema de navegación de las aeronaves pueda ser actualizado utilizando procedimientos manuales y las ayudas a la navegación representativas. Los datos deberían mostrar la precisión de la actualización alcanzada en las operaciones en servicio. Este factor debe ser considerado cuando se establece el tiempo límite RNP-10 de INS o IRU.
CONOCIMIENTOS DE LOS PILOTOS Y EL ENTRENAMIENTO Los siguientes artículos deben ser normalizados e incorporados a los programas de entrenamiento y procedimientos prácticos de funcionamiento. Ciertos artículos pueden estar ya suficientemente normalizados en los programas y procedimientos de operador. Las nuevas tecnologías también pueden eliminar la necesidad de determinadas acciones de la tripulación. Si este resulta ser el caso, entonces la intención de este adjunto se puede considerar que ha sido cumplido.
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-18
Nota.- Este material de orientación ha sido escrita para una amplia variedad de tipos de operadores, por lo tanto, algunos elementos que se han incluido no podrán aplicarse a todos los operadores. Los operadores comerciales deben velar por que las tripulaciones de vuelo han sido entrenadas para que sean conocedores de los temas contenidos en este material de orientación, los límites de sus capacidades de navegación RNP-10, los efectos de la actualización, RNP-10 y procedimientos de contingencia. Los operadores no comerciales deben de demostrar a la autoridad de aviación que sus pilotos son conocedores de las operaciones RNP-10. Sin embargo, algunos Estados podrían no requerir que los operadores no comerciales tengan programas de entrenamiento para algunos tipos de operaciones (por ejemplo, la Orden FAA 8700.1, Manual del Inspector de Operaciones de la Aviación General). De la autoridad de aviación, para determinar si la formación de un operador no comercial es adecuada, puede:
a) aceptar un certificado de un centro de entrenamiento sin más evaluación;
b) evaluar un curso de entrenamiento antes de aceptar un certificado de un centro de formación o un centro específico;
c) aceptar una declaración en la solicitud del operador de una aprobación RNP-10 que el operador ha garantizado y continuara garantizando que las tripulaciones de vuelo son conocedores de la operación, procedimientos y prácticas de RNP-10 y
d) aceptar un programa de formación del operador en casa
BASE DE DATOS DE NAVEGACIÓN Si se lleva una base de datos de navegación, esta debe estar actualizada y adecuada para las operaciones y deberá incluir las ayudas a la navegación y puntos de recorrido requeridos para la ruta.
SUPERVISIÓN DE LOS OPERADORES
Una autoridad de aviación podrá considerar los informes de errores de navegación para la determinación de medidas correctivas. Repetidos errores de navegación hechos atribuidos a una pieza especifica del equipo de navegación o procedimiento operacional puede dar lugar a la cancelación de la autorización operacional, a la espera de la sustitución o modificación en el equipo de navegación o cambios en los procedimientos operativos del operador. La información que indica el potencial de repetir los errores puede requerir una modificación del programa de entrenamiento del operador, programa de mantenimiento o certificación de equipos específicos. La información que atribuye a múltiples errores de una tripulación en particular puede requerir la corrección del entrenamiento o revisión de la licencia de la tripulación.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-1-19
REFERENCIAS
Sitios web: • Federal Aviation Administration (FAA), United States
http://www.faa.gov (see Regulations & Policies) • Civil Aviation Safety Authority (CASA), Australia
http://www.casa.gov.au/rules/1998casr/index.htm • International Civil Aviation Organization (ICAO)
http://www.icao.int/pbn
PUBLICACIONES RELACIONADAS
Federal Aviation Administration (FAA), United States
FAA 8400.12A Orden (modificada), performance de navegación requerida 10 (RNP-10) Aprobación Operacional Code of Federal Regulations (CFR), Parte 121, Subparte G, Manual de Requisitos
Circular Asesora (AC) 20-130A, Aprobación de Aeronavegabilidad de la navegación o sistemas de gestión de vuelo La integración de múltiples sensores de navegación
AC 20-138A, de Aprobación de Aeronavegabilidad del Sistema Mundial de Navegación por Satélite (GNSS) Equipo
Autoridades Conjuntas de Aviación (JAA)
AESA AMC 20-12 Orden de Reconocimiento de la FAA 8400.12a de Operaciones RNP-10
Autoridad de Seguridad de Aviación Civil (CASA), Australia (Civil Aviation Safety Authority (CASA), Australia)
Circular Asesora (AC) 91U-2 (0), la performance de navegación requerida 10 (RNP-10) Autorización de Operaciones
Organización de Aviación Civil Internacional (OACI)
Anexo 6 - Operación de aeronaves
Parte B Implementación de RNAV Capítulo 1 Aplicación de RNAV 10 (Designada y Aplicada Como RNP 10)
ll-B-1-20
Anexo 11 - Servicios de Tránsito Aéreo
Procedimientos para los servicios de navegación aérea - Gestión del Tránsito Aéreo (PANS-ATM) (Doc.. 4444) (Pueden obtenerse copias de la Unidad de Servicios al Cliente, OACI, 999 University Street, Montreal, Quebec, Canadá H3C 5H7 / sitio web: www.icao.int)
RTCA, Inc.
DO-236B, mínimo las normas de desempeño del sistema de aviación: Performance de navegación requerida para el Área Navegación
(Pueden obtenerse copias de RTCA, Inc., 1828 L Street NW, Suite 805, Washington, DC 20036, Estados Unidos / Sitio web: www.rtca.org)
Organización Europea de Equipos de Aviación Civil (EUROCAE) ED-75B, MASPS la performance de navegación requerida para la Navegación de área
(Pueden obtenerse copias de EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia / sitio web: www.eurocae.eu)
ll-B-2-1
CAPÍTULO 2
APLICACIÓN RNAV-5
INTRODUCCIÓN
Antecedentes
El Folleto Temporal de Orientación Nº 2 de la JAA fue publicado por primera vez en julio de 1996, que contiene los materiales de asesoramiento para la Aprobación de Aeronavegabilidad de sistemas de navegación para su uso en el espacio aéreo europeo designado para operaciones RNAV básicas. Tras la aprobación de la AMC de la JAA y, posteriormente la responsabilidad asignada a la AESA, este Documento ha sido re-publicado como AMC 20-4. La FAA ha publicado material comparable con la AC 90-96 del 20 de marzo de 1998. Estos dos Documentos ofrecen idénticos requisitos funcionales y operacionales. En el contexto de la terminología adoptada por este manual, B-RNAV se denomina requisitos RNAV-5.
PROPÓSITO Este capítulo proporciona orientación a los Estados para la aplicación de RNAV-5 en las fases de vuelo en ruta y proporciona a los proveedores de servicios de navegación aérea con una recomendación de la OACI sobre los requisitos de implementación, evitando la proliferación de normas y la necesidad de múltiples aprobaciones regionales. Le proporciona el criterio al operador para habilitar el funcionamiento en el espacio aéreo, donde se lleva RNAV y reúne 5 NM de precisión lateral ya es obligatorio (por ejemplo, BRNAV CEAC). Evita la necesidad de otras aprobaciones en otras regiones o áreas que necesitan aplicar la RNAV con la misma exactitud lateral y requisitos funcionales. Si bien aborda principalmente los requisitos de una operación RNAV en un ambiente de vigilancia ATS, la aplicación RNAV-5 se ha implementado en áreas donde no hay vigilancia. Esto ha exigido un aumento en el espaciamiento de ruta en consonancia con la garantía de cumplimiento de nivel de seguridad perseguido. La especificación RNAV-5 no requiere una alerta para el piloto en caso de exceso de errores de navegación. Dado que la especificación no exige llevar sistemas dobles
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-2
RNAV, la posibilidad de la pérdida de la capacidad RNAV requiere una fuente alterna de navegación. Este capítulo no se ocupa de todos los requisitos que pueden ser especificados para una operación en particular. Estos requisitos son especificados en otros Documentos, tales como normas de operación, publicaciones de información aeronáutica (AIP) y, en su caso, los Procedimientos suplementarios regionales (Doc. 7030). Si bien la aprobación operacional se refiere principalmente a los requisitos de navegación del espacio aéreo, los operadores y la tripulación de vuelo aun se requieren para tener en cuenta todos los Documentos operacionales relativos al espacio aéreo, que son requeridos por la autoridad del Estado, antes de la realización de vuelos en ese espacio aéreo. CONSIDERACIONES DEL PROVEEDOR DE SERVICIOS DE NAVEGACIÓN AÉREA
(ANSP)
Infraestructura de ayudas para la navegación
Los Estados podrán prescribir el porte de RNAV-5 sobre rutas específicas o áreas específicas / niveles de vuelo de su espacio aéreo. Los sistemas RNAV-5 permiten a la aeronave navegación a lo largo de cualquier trayectoria de vuelo dentro de la cobertura de la estación de referencia o ayudas a la navegación (espacial o terrestre) o dentro de los límites de la capacidad de auto-ayudas (sistemas inerciales), o una combinación de ambos métodos. Las operaciones RNAV-5 están basadas en el uso de equipo RNAV que determina automáticamente la posición de la aeronave en el plano horizontal, mediante el uso de uno o una combinación de los siguientes tipos de sensores de posición, junto con los medios para establecer y seguir la trayectoria deseada:
a) VOR/DME;
b) DME/DME;
c) INS o IRS; y
d) GNSS.
La ANSP debe evaluar la infraestructura de ayudas a la navegación con el fin de garantizar que sea suficiente para las operaciones proyectadas, incluidos los modos de reversión. Es aceptable que las lagunas (vacios) en la cobertura de ayudas a la navegación a estar presente; cuando esto ocurre, el espaciamiento en ruta y las superficies de franqueamiento de obstáculos necesitan tener en cuenta el aumento previsto de los errores en el mantenimiento de la trayectoria lateral durante la fase de vuelo "del tramo a estima".
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-3
COMUNICACIONES Y VIGILANCIA ATS La comunicación directa piloto-ATC (voz) es requerida. Cuando se confía en el uso de la vigilancia ATS para ayudar a los procedimientos de contingencia, su rendimiento deben ser adecuados para ese fin. El monitoreo Radar por parte del ATS se puede utilizar para reducir o mitigar el riesgo de graves errores de navegación, siempre que la ruta se sitúa dentro de la vigilancia ATS y los servicios de comunicaciones y los volúmenes de los recursos ATS son suficientes para la tarea.
FRANQUEAMIENTO DE OBSTÁCULOS Y ESPACIAMIENTO EN RUTA Orientaciones detalladas sobre el franqueamiento de obstáculos se proporcionan en los PANS-OPS (Doc. 8168), Volumen II, se aplican los criterios generales de las partes I y III. El Estado es responsable del espaciamiento de la ruta y el ATS debe tener vigilancia y herramientas de monitoreo para soportar la detección y corrección de errores de navegación. El Estado debe consultar los textos de orientación de la OACI en relación con el espaciamiento de rutas RNAV-5 o entre rutas RNAV-5 y rutas convencionales. Un Estado ha demostrado un espaciamiento de ruta, de 30 NM para satisfacer los objetivos de seguridad de 5 x 10-9 accidentes mortales por hora de vuelo en ausencia de vigilancia ATS y en un medio ambiente de alta densidad de tránsito. Cuando la densidad del tránsito es baja, el espaciamiento de ruta puede reducirse. En un entorno de vigilancia ATC, el espaciamiento de ruta dependerá de una aceptable carga de trabajo ATC y la disponibilidad de herramientas de control. Una implementación regional RNAV-5 adoptada en un espaciamiento de ruta estándar de 16,5 NM para rutas de un mismo sentido del tránsito y 18 NM para rutas de tránsito de dirección opuesta - .Por otra parte, el espaciamiento de ruta tan bajo como 10 NM, se ha utilizado donde se permite la capacidad de intervención del ATC. El diseño de rutas, que dará cuenta de la performance de navegación alcanzable utilizando la infraestructura de ayudas a la navegación, así como las capacidades funcionales exigidos por el presente Documento. Dos aspectos son de particular importancia: Espaciamiento entre las rutas con virajes El secuenciamiento automático de tramos y la anticipación de virajes asociados es sólo una función recomendada de RNAV-5. La trayectoria siguiente ejecutando virajes depende de la velocidad verdadera, aplica el ángulo de banqueo y los límites de viento. Estos factores, junto con la iniciación de distintos criterios de viraje utilizados por los fabricantes, resultan en una gran propagación de rendimientos de viraje. Los estudios han demostrado que para un cambio de trayectoria de tan poco de 20 grados, la
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-4
trayectoria actual volada puede variar tanto como 2 NM. Esta variabilidad de los rendimientos de virajes debe tenerse en cuenta en el diseño de la estructura de rutas estrechamente espaciadas son propuestas. Distancia a lo largo de la trayectoria entre cambios de tramos El viraje puede comenzar tan temprano como 20 NM antes del punto de recorrido en el caso de una trayectoria con un gran ángulo de cambio determinado por un punto de recorrido "fly-by" (de vuelo por), viraje manualmente iniciado puede rebasar (overshoot) la siguiente trayectoria. El diseño de la estructura de ruta debe garantizar cambios de tramos que no sean demasiado estrechos y juntos, y la longitud de la trayectoria requerida entre virajes depende a su vez del ángulo de viraje.
CONSIDERACIONES ADICIONALES
Muchas aeronaves tienen la capacidad para volar una trayectoria paralela, pero se compensa a la izquierda o a la derecha, en la ruta original activa. El propósito de esta función es permitir a las compensaciones para las operaciones tácticas autorizadas por el ATC. Muchas aeronaves tienen la capacidad de ejecutar una maniobra de patrón de sostenimiento usando el sistema RNAV, que pueden proporcionar la flexibilidad al ATC en el diseño de operaciones RNAV. La orientación en este capítulo no sustituye adecuadamente los requerimientos de funcionamiento del Estado de equipo.
PUBLICACIÓN
En la AIP se debería indicar claramente la aplicación de navegación RNAV-5. El requisito para llevar equipos RNAV-5 en espacio aéreo específicos o sobre rutas identificadas debe ser publicado en el AIP. La ruta debe basarse en descenso normal de los perfiles e identificar los requisitos mínimos de altitud del segmento. Los datos de navegación publicados en el AIP del Estado para las rutas y el soporte de las ayudas a la navegación deberán cumplir los requisitos del Anexo -15 Servicios de Información Aeronáutica. Todas las rutas deben basarse en las coordenadas WGS-84. La infraestructura disponible de ayudas a la navegación debe ser claramente designada en todas las cartas (por ejemplo, GNSS, DME/DME, VOR/DME). Cualquier instalación de navegación que es crítica para las operaciones RNAV-5 debe ser identificada en las publicaciones pertinentes Una base de datos de navegación no forma parte de la funcionalidad requerida de RNAV-5. La ausencia de tal base de datos requiere la entrada manual de puntos de recorrido, lo que aumenta significativamente las posibilidades de errores en los puntos
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-5
de recorrido. Las cartas en ruta deben soportar la comprobación de errores crasos por la tripulación de vuelo mediante la publicación de los datos de puntos de referencia para puntos de recorrido seleccionados en rutas RNAV-5.
ENTRENAMIENTO DE LOS CONTROLADORES Se recomienda que los controladores de tránsito aéreo en la prestación de servicios de control en espacio aéreo donde esta implementado el RNAV-5 debiera completar la formación en las siguientes áreas: Capacitación Básica
a) ¿Cómo trabajan los sistemas de navegación área (en el contexto de esta especificación de navegación): � Incluyendo la capacidad funcional y las limitaciones de esta especificación de navegación;
� la precisión, integridad, disponibilidad y continuidad;
� el receptor GPS, RAIM, FDE, la integridad y las alertas;
b) requisitos del plan de vuelo;
c) los procedimientos de ATC:
� procedimientos de contingencia ATC;
� las mínimas de separación;
� ambiente de equipo mixto (impacto de sintonización manual del VOR);
� la transición entre los distintos entornos operativos, y
� la fraseología.
ESTADO DEL MONITOREO La infraestructura de ayudas a la navegación deben ser monitoreados y mantenidos y deben expedirse (NOTAM) oportunos sobre advertencias de los cortes o suspensiones.
SISTEMA DE VIGILANCIA ATS El Monitoreo de la performance de la navegación es necesario por dos razones:
a) La precisión de la navegación "típica" demostrada proporciona una base para determinar si el rendimiento del conjunto de las aeronaves que operan en rutas RNAV reúne el performance requerido;
b) El espaciamiento lateral de rutas y la separación mínima necesaria para que opere el tránsito en una determinada ruta se determinada tanto por el núcleo y el rendimiento de los fallos normalmente raros en el sistema.
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-6
El rendimiento lateral en ambos lados y los fallos deben ser monitoreados a fin de establecer la seguridad general del sistema y para confirmar que el sistema ATS cumple con el nivel perseguido de seguridad. Las observaciones por radar de cada aeronave de la proximidad a la trayectoria y la altitud son típicamente observadas por las instalaciones del ATS y las capacidades de mantenimiento de la trayectoria de las aeronaves se analizan. Deberá ser establecido un proceso que permita a los pilotos y a los controladores de reportar incidentes donde los errores de navegación son observados. Si una observación o análisis indica que una pérdida de separación o de franqueamiento de obstáculos ha ocurrido, la razón para la aparente desviación de la trayectoria o altitud debe ser determinada y tomar las medidas para prevenir una recurrencia.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes Esta sección identifica los requisitos operacionales para operaciones RNAV-5. El cumplimiento operacional de estos requisitos debería abordarse a través de reglamentos operativos nacionales, y pueden requerir aprobaciones operativas específicas, en algunos casos. Los operadores serán aprobados en contra de sus normas de funcionamiento. Por ejemplo, en la ECAC, JAR OPS 1 exige a los operadores aplicar a su autoridad nacional para la aprobación operacional. La equivalencia de los requisitos técnicos de RNAV-5 y B-RNAV significa que los equipos aprobados en contra de la normativa nacional vigente para la B-RNAV normalmente no se requieren una mayor aprobación técnica. El RNAV-5 no requiere llevar una base de datos de navegación. Debido a las limitaciones específicas (por ejemplo, carga de trabajo y el potencial de errores de la entrada de los datos) asociados con la inserción manual de los datos de las coordenadas de los puntos de recorrido, las operaciones RNAV-5 debe limitarse a la fase de vuelo en ruta.
PROCESOS DE APROBACIÓN
Esta especificación de navegación no constituye por sí misma en reglamentación y material de orientación por la cual las aeronaves o el operador serán evaluados y aprobados. Las aeronaves están certificadas por el Estado de Fabricación. Los operadores están aprobados de conformidad con las normas operacionales nacionales. La especificación de navegación proporciona los criterios técnicos y operativos, y no implica la necesidad de re certificación. Los siguientes pasos deben ser completados antes de realizar operaciones RNAV-5:
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-7
a) La elegibilidad de equipo de la aeronave se determinará y se Documentara, que puede lograrse considerando para la aprobación previa la AMC 20-4. o AC 90-96
b) Los procedimientos operativos para los sistemas de navegación utilizados deben ser Documentados
c) El entrenamiento de la tripulación de vuelo sobre la base de los procedimientos operativos deben ser Documentados;
d) El material Documentado anteriormente debe ser aceptado por la autoridad reguladora del Estado, y
f) La aprobación operacional deben ser obtenidos de conformidad con las normas de funcionamiento nacionales.
Tras la finalización con éxito de los pasos anteriores, una aprobación operacional RNAV-5, Carta de Autorización o la especificación operacional adecuada (Especificación de Operaciones), en caso necesario, debe ser expedida por el Estado. Elegibilidad de Aeronaves La elegibilidad de aeronaves tiene que ser determinado a través de la demostración de cumplimiento contra los criterios de aeronavegabilidad, por ejemplo, AMC 20-4 o AC 90-96. El fabricante original de equipos (OEM) o el titular de la aprobación de instalación de la aeronave, por ejemplo, titular del Certificado Tipo Suplementario (STC), deberá demostrar el cumplimiento a la autoridad nacional de aeronavegabilidad (NAA) (por ejemplo, la EASA, FAA) y la aprobación puede ser Documentada en la Documentación del fabricante (por ejemplo, una carta de servicios). El Manual de vuelo del avión (AFM), las entradas no son necesarias siempre cuando el Estado acepte la Documentación del fabricante. La aprobación operacional La evaluación de un operador en particular es hecha por el Estado del Operador y el registro para ese operador de conformidad con las normas de funcionamiento nacionales (por ejemplo, las JAR-OPS 1, 14 CFR Parte 121) apoyada a través de la asesoría y material de orientación en los Documentos como AMC 20-4 o AC 90-96. La evaluación debería tener en cuenta:
a) pruebas de elegibilidad de los aviones;
b) evaluación de los procedimientos operativos para el sistema de navegación que se utilice;
c) identificación de los requisitos de entrenamiento de la tripulación de vuelo, y
d) identificación de la tripulación de vuelo, requisitos de formación, y
e) cuando sea necesario, el control de los procesos de la base de datos navegación.
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-8
Nota.- La aprobación operacional, basada en la AMC 20-4 o AC 90-96 cumple con los requisitos de cualquier espacio aéreo o ruta designados como RNAV-5. La aprobación operacional será Documentada a través del Estado que aprobó el certificado de operador aéreo (AOC) cuestión a través de una carta de autorización, la especificación adecuada de operaciones (especificaciones de operación) o una enmienda al manual de operaciones. Descripción del equipo de la aeronave El operador deberá disponer de una lista de configuración detalla de los componentes y de equipos pertinentes que se utilizarán para operaciones RNAV-5. Documentación de Entrenamiento Los operadores comerciales deben tener un programa de entrenamiento direccionado a prácticas operacionales, procedimientos y temas relacionados con el entrenamiento de operaciones RNAV-5 (por ejemplo inicial, actualización o entrenamiento periódico para la tripulación de vuelo, despachadores o personal de mantenimiento). Nota.- No es necesario establecer un programa de entrenamiento separado o en régimen de entrenamiento RNAV si ya es un elemento integrado de un programa de entrenamiento. Sin embargo, debería ser posible identificar los aspectos que son cubiertos dentro del programa de entrenamiento RNAV. Los operadores privados deben estar familiarizados con las prácticas y procedimientos identificados en conocimiento de piloto y el entrenamiento Manuales de operación y listas de comprobación Manuales de operación y listas de comprobación para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos operacionales normalizados detallados en "Procedimientos Operacionales". Los manuales apropiados deben contener instrucciones operacionales de navegación y procedimientos de contingencia si se especifica. Los manuales y listas de comprobación deben ser sometidos a un examen como parte del proceso de la aplicación. Los operadores privados operaran usando las prácticas y procedimientos identificados en " conocimiento del piloto y entrenamiento”. Consideraciones de lista de equipo mínimo (MEL) Cualquier revisión de la MEL necesaria para hacer frente a las disposiciones RNAV-5 debe ser aprobada. Los operadores deben ajustar la MEL, o equivalente, y especificar las condiciones requeridas de ejecución.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-9
Ruta de migración al RNAV-5 Los requisitos de la B-RNAV son idénticos a RNAV-5. En el material Nacional de reglamentación se espera tener en cuenta esta equivalencia. Ningún camino de migración adicional se requiere. Esto no exime al operador de la responsabilidad, en relación con todas las operaciones, para consultar y cumplir con los procedimientos o reglamentaciones específicos nacionales y regionales. Requisitos de las Aeronaves
Las operaciones RNAV-5 se basan en el uso de equipo RNAV los cuales automáticamente determina la posición de la aeronave mediante la entrada de uno o una combinación de los siguientes tipos de sensores de posición, junto con los medios para establecer y seguir una trayectoria deseada:
a) VOR/DME;
b) DME/DME;
c) INS o IRS; y
d) GNSS.
El rendimiento del sistema, el monitoreo y la alerta Precisión: Durante las operaciones en el espacio aéreo o en rutas designadas como RNAV-5, el error lateral total del sistema debe estar dentro 5 NM al menos el 95 por ciento del total de tiempo de vuelo. El error a lo largo de la trayectoria debe también estar dentro de ± 5 NM al menos el 95 por ciento del total de tiempo de vuelo. Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como una condición de falla mayor en virtud de la reglamentación de aeronavegabilidad (es decir, 10-5 por hora). Continuidad: La pérdida de la función está clasificada como una condición de fallo menor si el operador puede revertir o volver a un sistema de navegación diferente y proceder a un aeropuerto apropiado. Señal en el espacio: Si está utilizando el GNSS, el equipo de navegación de la aeronave deberá presentar una alerta si la probabilidad de errores de la señal en el espacio causan un error de posición lateral mayor de 10 NM y supera 10-7 por hora (OACI Anexo 10, Volumen I, Tabla 3.7.2.4-1). Nota .- El nivel mínimo de integridad y la continuidad necesaria para sistemas RNAV-5 para uso en el espacio aéreo designado RNAV-5 normalmente se reuniría por un solo sistema instalado que comprende uno o más sensores, un ordenador RNAV, una unidad de visualización y control y pantalla(s) de navegación (por ejemplo, ND, CDI o HSI), siempre que el sistema este supervisado por la tripulación de vuelo y que en el
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-10
caso de un fallo del sistema la aeronave tiene la capacidad para navegar en relación a ayudas de navegación de base terrestre (por ejemplo, VOR / DME y NDB). Criterios específicos para los servicios de navegación Sistema de navegación inercial (INS) / sistema de referencia inercial (IRS) Los sistemas inerciales pueden ser utilizados ya sea como sistema de navegación inercial (INS) autónomo, o un sistema de referencia inercial (IRS) como parte de un sistema RNAV multi-sensor, donde los sensores inerciales proporcionan aumentación a los sensores de posición básico, así como una reversión de las fuentes de datos de posición cuando las fuentes de radio navegación estén fuera de cobertura. Un INS sin actualización automática de la posición en la aeronave, pero aprobado de acuerdo con el AC 25-4, y cuando cumpla con los criterios funcionales de este capítulo, sólo podrá utilizarse durante un máximo de 2 horas desde la última alineación de posición y actualización realizada en tierra. Puede darse la posibilidad de configuración específica del INS (por ejemplo, triple combinación) donde uno u otro equipo del fabricante del avión justifiquen el uso prolongado de la última actualización de posición. Un INS con actualización automática de la posición de la aeronave, incluidos los sistemas donde la selección manual de los canales de radio se realiza de conformidad con los procedimientos de la tripulación de vuelo, debe ser aprobado de conformidad con AC-90-45A, AC 20-130A o material equivalente. Radio faro omnidireccional de muy alta frecuencia (VHF) (VOR) La exactitud del VOR normalmente pueden satisfacer los requisitos de precisión RNAV-5 hasta 60 NM (75 NM para VOR Doppler) de la ayuda a la navegación. En regiones específicas dentro de la cobertura VOR puede experimentar grandes errores debidos a los efectos de la propagación (por ejemplo, multi-trayecto). Cuando existen estos errores, esto puede ser resuelto por la prescripción de zonas afectadas donde el VOR no se puede utilizar. La acción alternativa podría ser la de tener en cuenta el rendimiento menor del VOR en la creación de la propuesta de rutas RNAV, por ejemplo, aumentar el espaciamiento de ruta. Hay que tener en cuenta la disponibilidad de otras ayudas a la navegación que puedan dar cobertura en la zona afectada y que no todas las aeronaves puedan estar usando el VOR en cuestión y puede, por tanto, no conservar el mismo desempeño de la trayectoria. Equipos de medición de distancia (DME) Las señales DME se consideran suficientes para satisfacer las necesidades de RNAV-5, cuando las señales son recibidas y no hay DME más cerca en el mismo canal, independientemente de la cobertura del volumen publicado. Cuando el sistema RNAV-5 no tiene en cuenta lo publicado " cobertura operacional designada " del DME, el sistema RNAV debe ejecutar los chequeos de integridad de los datos para confirmar que la señal DME es correcta y se está recibiendo.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-11
Cada uno de los componentes de la infraestructura de ayudas a la navegación deberá ajustarse a los requisitos detallados en Anexo 10, Volumen I. Ayudas a la navegación las que no están conformes con el anexo 10 no debería ser publicado en el AIP del Estado. Sistema de Navegación Mundial por Satélite (GNSS) La utilización de los GNSS para realizar operaciones RNAV-5 se limita a los equipos homologados para ETSO-C129, ETSOC145, ETSO-C146, la FAA TSO-C145 (), TSO-C146, y TSO-C129 o equivalente, e incluyen el sistema mínimo de funciones especificadas en Los Requisitos Funcionales. La integridad debe ser proporcionada por SBAS GNSS o por el Monitoreo Autónomo de la Integridad del Receptor (RAIM), o un medio equivalente, o un sistema de navegación multi-sensor. Además, el GPS como equipo autónomo debe incluir las siguientes funciones:
I. Medir a pasos la detección de pseudo-distancias, y
II. La comprobación de la salud del sistema. Nota.- Estas dos funciones adicionales han de aplicarse de conformidad con el TSO-C129a / ETSO-C129a o criterios equivalentes. En caso de que la aprobación para operaciones RNAV-5 requiere el uso de los equipos tradicionales de navegación como una reserva en caso de pérdida del GNSS, las ayudas a la navegación requeridas, tal como se definen en la aprobación (es decir, VOR, DME y/o ADF), se necesitan estar instaladas y en servicio. Los datos de posicionamiento de otros tipos de sensores de navegación puede estar integrados con el GNSS, datos de posicionamiento proporcionados por otros no causan errores de posición superior excediendo la exactitud del mantenimiento de la trayectoria. Los requisitos funcionales Las siguientes funciones del sistema son el mínimo necesario para llevar a cabo operaciones RNAV-5:
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-12
a) continua indicación de la posición de la aeronave en relación con la trayectoria que se mostrará al piloto que vuela la aeronave, en una pantalla de navegación situada en su campo de visión principal; b) donde la tripulación mínima de vuelo es de dos pilotos, la indicación de la posición de la aeronave en relación con la trayectoria que se muestra al piloto que no vuela la aeronave, en una pantalla de navegación situada en su campo principal de visión;
c) pantalla que muestre la distancia y el rumbo al punto de recorrido activo;
d) pantalla que muestre la velocidad de tierra (GS) o en el tiempo al punto de Recorrido activo,
e) almacenamiento de puntos de recorrido, mínimo de 4, y
f) adecuada indicación de falla del sistema RNAV, incluidos los sensores.
Pantallas de navegación RNAV-5 Los datos de navegación deben estar disponible para su visualización en una pantalla, ya sea que formen parte del equipo RNAV o en una pantalla de desviación lateral (por ejemplo, CDI, (E) HSI, o un despliegue de mapa de navegación). Estos deben ser utilizados como instrumentos principales de vuelo para la navegación de la aeronave, de maniobra de anticipación y para indicación de / fallo/ estado /integridad. Deben cumplir los siguientes requisitos:
a) la pantalla debe ser visible para el piloto cuando se mira hacia adelante a lo largo de la trayectoria de vuelo;
b) la pantalla de desviación lateral ampliada debe ser compatible con cualquier anuncio de alerta y anunciación de límites, implementada, y
c) la desviación lateral de la pantalla debe tener una ampliación y la totalidad de la escala adecuada para la operación RNAV-5.
PROCEDIMIENTOS OPERATIVOS La certificación de aeronavegabilidad por sí sola no autoriza los vuelos en el espacio aéreo, o a lo largo de rutas para las cuales la aprobación RNAV-5 es requerida. La aprobación operacional se requiere también para confirmar la idoneidad de los operadores en procedimientos normales y de contingencia para la instalación del equipo en particular. Planificación Pre-vuelo
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-13
Los operadores y pilotos que intentan llevar a cabo operaciones en las rutas RNAV-5 deben presentar el correspondiente plan de vuelo e indiquen con los sufijos su aprobación para operar en las rutas RNAV-5. Durante la fase de planificación pre-vuelo, la disponibilidad de la infraestructura de ayudas a la navegación, requerida para las rutas destinadas, incluidas las contingencias no-RNAV, deberán ser confirmadas durante el período de operación. El piloto debe también confirmar la disponibilidad de los equipos de navegación a bordo necesarios para la operación. Cuando una base de datos de navegación se utiliza, debe estar actualizada y adecuada para la región donde se lleva a cabo la operación y debe incluir ayudas a la navegación y puntos de recorrido necesarios para la ruta. La disponibilidad de la infraestructura de ayudas a la navegación, necesaria para la rutas a volar, incluidas las contingencias no-RNAV, deberán ser confirmadas durante el período de operación utilizando toda la información disponible. Desde la integridad GNSS (RAIM o señal SBAS) es requerido por el Anexo 10, Volumen I, la disponibilidad de estos también debe determinarse como apropiado. Para las aeronaves que cuentan con receptores de navegación SBAS (toda las TSO-C145/C146), los operadores deben verificar la disponibilidad GPS RAIM apropiada y en áreas donde la señal SBAS no está disponible. Disponibilidad ABAS Los niveles RAIM en ruta son necesarios para RNAV-5 y se pueden verificar, ya sea a través de NOTAMs (donde esté disponible) o a través de los servicios de predicción. La autoridad de funcionamiento ofrecen orientaciones concretas sobre la manera de cumplir con este requisito (por ejemplo, si se dispone de suficientes satélites, una predicción puede no ser necesaria). Los operadores deben estar familiarizados con la información de la predicción disponible por la ruta prevista. La disponibilidad de predicción RAIM debe tener en cuenta los últimos NOTAMs de la constelación GPS y modelo aviónica. El servicio puede ser proporcionado por la ANSP, los fabricantes de aviónica, otras entidades o a través de la capacidad de predicción RAIM del receptor a bordo. En el caso de que se pronostique una continua pérdida de nivel adecuado de detección de fallos de más de cinco minutos para cualquier parte de la operación RNAV-5, la planificación de los vuelos deben ser revisados (es decir, retrasar la salida o la planificación de un procedimiento de salida diferente). El software de predicción de disponibilidad RAIM es una herramienta utilizada para evaluar la capacidad prevista para cumplir con el performance de navegación requerida. Debido a una falla imprevista de algún elemento del GNSS, los pilotos y ANSP deben darse cuenta de que el RAIM o navegación GPS pueden perderse por completo, mientras se está en el aire, pueden exigir la reversión a un medio de navegación
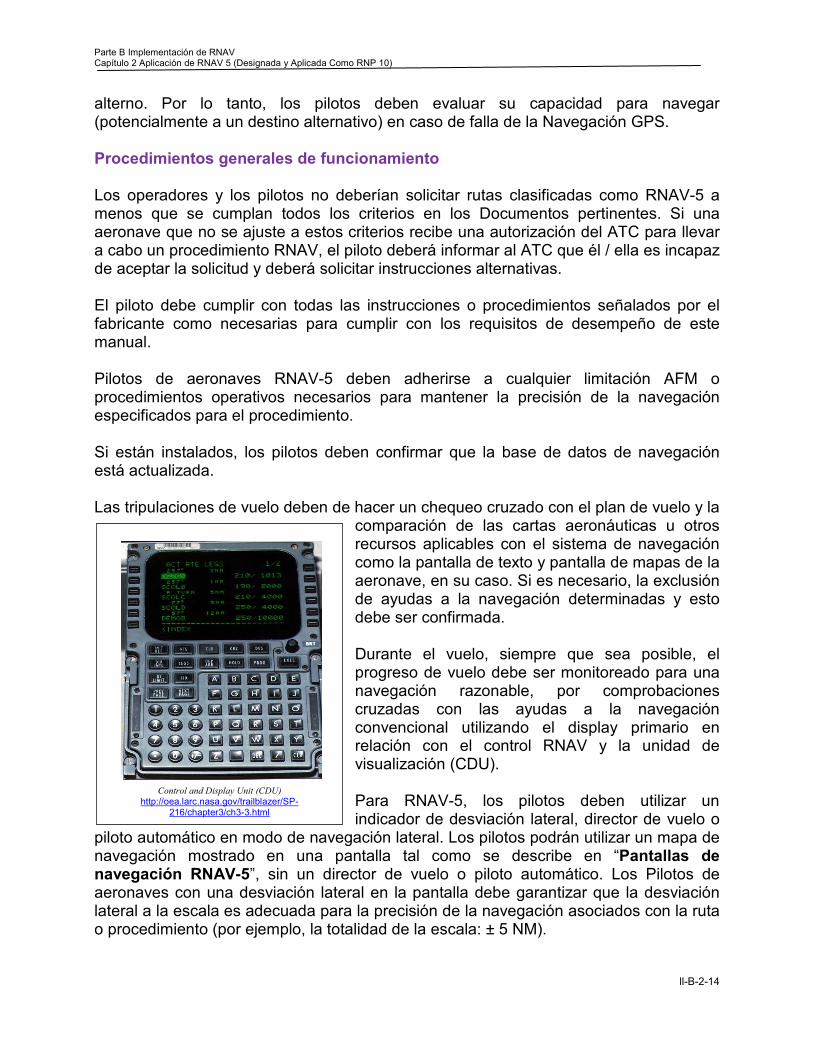
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-14
alterno. Por lo tanto, los pilotos deben evaluar su capacidad para navegar (potencialmente a un destino alternativo) en caso de falla de la Navegación GPS. Procedimientos generales de funcionamiento Los operadores y los pilotos no deberían solicitar rutas clasificadas como RNAV-5 a menos que se cumplan todos los criterios en los Documentos pertinentes. Si una aeronave que no se ajuste a estos criterios recibe una autorización del ATC para llevar a cabo un procedimiento RNAV, el piloto deberá informar al ATC que él / ella es incapaz de aceptar la solicitud y deberá solicitar instrucciones alternativas. El piloto debe cumplir con todas las instrucciones o procedimientos señalados por el fabricante como necesarias para cumplir con los requisitos de desempeño de este manual. Pilotos de aeronaves RNAV-5 deben adherirse a cualquier limitación AFM o procedimientos operativos necesarios para mantener la precisión de la navegación especificados para el procedimiento. Si están instalados, los pilotos deben confirmar que la base de datos de navegación está actualizada. Las tripulaciones de vuelo deben de hacer un chequeo cruzado con el plan de vuelo y la
comparación de las cartas aeronáuticas u otros recursos aplicables con el sistema de navegación como la pantalla de texto y pantalla de mapas de la aeronave, en su caso. Si es necesario, la exclusión de ayudas a la navegación determinadas y esto debe ser confirmada. Durante el vuelo, siempre que sea posible, el progreso de vuelo debe ser monitoreado para una navegación razonable, por comprobaciones cruzadas con las ayudas a la navegación convencional utilizando el display primario en relación con el control RNAV y la unidad de visualización (CDU). Para RNAV-5, los pilotos deben utilizar un indicador de desviación lateral, director de vuelo o
piloto automático en modo de navegación lateral. Los pilotos podrán utilizar un mapa de navegación mostrado en una pantalla tal como se describe en “Pantallas de navegación RNAV-5”, sin un director de vuelo o piloto automático. Los Pilotos de aeronaves con una desviación lateral en la pantalla debe garantizar que la desviación lateral a la escala es adecuada para la precisión de la navegación asociados con la ruta o procedimiento (por ejemplo, la totalidad de la escala: ± 5 NM).
Control and Display Unit (CDU)
http://oea.larc.nasa.gov/trailblazer/SP-216/chapter3/ch3-3.html
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-15
Se espera que todos los pilotos mantengan el eje de la ruta, como se describe en los indicadores de desviación lateral a bordo y/o de guiado de vuelo, durante todas las operaciones RNAV descritas en este manual, a menos que sea autorizado por el ATC para desviarse o bajo condiciones de emergencia. Para las operaciones normales, el error perpendicular a la derrota / desviación (la diferencia entre la trayectoria computada por el sistema RNAV y la posición relativa de la aeronave con respecto a la trayectoria) debe limitarse a mas o menos la mitad de la precisión de la navegación asociada con la ruta o el procedimiento (es decir, 2,5 NM). Breves desviaciones de esta norma (por ejemplo, rebasamiento o undershoots) durante e inmediatamente después de un viraje en un procedimiento/ruta, hasta un máximo de una vez la precisión de la navegación (es decir, 5 NM), son admisibles. Nota.- Algunas aeronaves no muestran o calculan una trayectoria durante los virajes, los pilotos de estas aeronaves puede que no sean capaces de adherir la exactitud de más o menos la mitad de la precisión normalizada durante virajes en ruta, pero aún se espera que cumplan las normas durante la intersección del tramo final siguiendo el viraje, y sobre segmentos rectos. Si el ATS emite una asignación de rumbo que conduce la aeronave fuera de una ruta, el piloto no debe modificar el plan de vuelo en el sistema RNAV hasta que se recibe una autorización para retornar a la ruta o el controlador confirma una nueva autorización. Cuando la aeronave no está sobre la ruta publicada, el requisito de exactitud especificado no aplica. Procedimientos de Contingencia El piloto debe notificar al ATC cuando el performance RNAV deja de cumplir los requisitos para la RNAV-5. La comunicación al ATC debe estar en conformidad con los procedimientos autorizados (Doc. 7030 o Doc. 4444, según corresponda). En el caso de fallo de las comunicaciones, la tripulación de vuelo debe continuar con el plan de vuelo de conformidad con lo publicado en el procedimiento de "pérdida de comunicación". Cuando se utiliza equipo GNSS autónomo:
a) En caso de que haya una pérdida de la función de detección RAIM, la posición GNSS, podrán seguir utilizándose para la navegación. La tripulación de vuelo debe intentar un chequeo cruzado de la posición de la aeronave, con otras fuentes de información de posición (por ejemplo, VOR, DME y/o información NDB) para confirmar un nivel aceptable de rendimiento de la navegación. En caso contrario, la tripulación de vuelo debería volver a un medio alterno de navegación y notificar al ATC.
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-16
b) En el caso de que la pantalla de navegación muestre una bandera de invalides debido a la alerta RAIM, la tripulación de vuelo deben volver a un medio alterno de navegación y notificar al ATC.
Conocimiento del Piloto y Entrenamiento El programa de capacitación del piloto deberían abordar los siguientes temas:
a) las capacidades y limitaciones de la instalación del sistema RNAV;
b) las operaciones y espacio aéreo para las que el sistema RNAV está aprobado para operar;
c) las limitaciones de la ayudas a la navegación con respecto al sistema RNAV que se utilizarán para la operación RNAV-5;
d) procedimientos de contingencia para fallos RNAV;
e) la fraseología radiotelefónica para el espacio aéreo, de conformidad con el Doc. 4444 y Doc. 7030, según corresponda;
f) los requerimientos de planificación de los vuelos para la operación RNAV;
g) Los requisitos de RNAV como determinado de la representación grafica y la descripción textual
h) sistema de información RNAV específica, incluyendo:
I) los niveles de automatización, modo de anuncios, los cambios, alertas, interacciones, reversiones, y la degradación; II) la integración funcional con otros sistemas de la aeronave; III) los procedimientos de monitoreo para cada fase del vuelo (por ejemplo, monitor PROG o LEGS page); IV) los tipos de sensores de navegación (por ejemplo, DME, IRU, GNSS) utilizados por el sistema RNAV y asociados al sistema de priorización / peso / lógica; V) anticipación de viraje en consideración a la velocidad y efectos de la altitud; VI) la interpretación de las pantallas electrónicas y los símbolos;
i) procedimientos operativos de los equipos RNAV, en su caso, incluida la forma de realizar las siguientes acciones:
I) verificar que los datos de navegación de la aeronave estén actualizados;
II) verificar el éxito de auto- pruebas del sistema RNAV;
III) inicializar la posición del sistema RNAV;
IV) volar directamente a un punto de recorrido;
V) interceptar un curso / trayectoria;
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-17
VI) ser vectorizado fuera del procedimiento y regresar a un procedimiento;
VII) determinar el error perpendicular a la trayectoria / desviación;
VIII) quitar y volver a la entrada del sensor de navegación;
IX) cuando sea necesario, confirmar la exclusión de una ayuda para la navegación o tipo de ayuda a la navegación,
j) chequear grandes errores de navegación utilizando ayudas a la navegación convencional.
BASE DE DATOS DE NAVEGACIÓN Cuando se lleva una base de datos de navegación y se utiliza, debe estar actualizada y adecuada para la región de operación y debe incluir las ayudas a la navegación y puntos de recorrido necesarios para la ruta. Nota.- se espera que las bases de datos de navegación estén actualizadas para el período de duración del vuelo. Si el ciclo AIRAC cambia durante el vuelo, los operadores y los pilotos deben establecer procedimientos para garantizar la exactitud de los datos de navegación, incluida la adecuación de las instalaciones de navegación usadas para definir las rutas de vuelo. Tradicionalmente, esto se ha logrado mediante la comprobación de los datos electrónicos en contra de los productos de papel.
SUPERVISIÓN DE LOS OPERADORES Un proceso necesita ser establecido para que los informes de errores de navegación puedan ser presentados y analizados con el fin de establecer la necesidad de medidas correctivas. Errores repetidos de navegación hechos atribuidos a una pieza del equipo de navegación necesitan tener un seguimiento para tomar una acción correctiva y eliminar las causas o factor (s). La naturaleza que causa el error determinará las medidas correctivas que podrían incluir la necesidad de entrenamiento para la reparación, las restricciones en la aplicación del sistema, o los requisitos de software para los cambios en el sistema de navegación. La naturaleza y la gravedad del error pueden resultar en la cancelación temporal de la autorización para la utilización de dicho equipo hasta que la causa del problema haya sido identificada y rectificado.
Parte B Implementación de RNAV Capítulo 2 Aplicación de RNAV 5 (Designada y Aplicada Como RNP 10)
ll-B-2-18
REFERENCIAS
EASA medios aceptables de cumplimiento
a) AMC 25-11 sistemas electrónicos de visualización
b) AMC 20-5 medio aceptable de cumplimiento para la aprobación de aeronavegabilidad y criterios operacionales para la utilización de la NAVSTAR Global Positioning System (GPS)
CIRCULARES DE ASESORAMIENTO FAA
a) AC 25-4 sistemas de navegación inercial (INS)
b) AC 25-15 Aprobación del FMS en Aviones de categoría de transporte
c) AC 90-45 Aprobación de un Sistemas de Navegación Área para su uso en el Sistema de espacio aéreo Nacional USA.
TSO/ETSOs
a) TSO/ETSO-C115b Equipos de navegación de Área a bordo Usando entradas de múltiples sensores
b) TSO/ETSO-C129a Equipo Suplementario de Navegación a bordo Usando el Sistema de Posicionamiento (GPS)
c) TSO/ETSO-C145 Sensores de Navegación a bordo Usando Sistema de Posicionamiento (GPS) Aumentado por el Sistema de Aumentación de Área Amplia (WAAS).
d) TSO/ETSO-C146 Equipo autónomo de navegación a bordo Sistema de Posicionamiento (GPS) Aumentado por el Sistema de Aumentación de Área Amplia (WAAS).
Documentos EUROCAE/RTCA
a) ED-27 Requisitos Mínimos de Performance operacional (MOPR) Para sistemas de Navegación de Área, basados en VOR y DME como sensores
b) ED-28 Especificación Mínima de Performance (MPS) para Navegación de Área con Equipos de Computo basados en VOR y DME como sensores
c) ED-39 Requisitos Mínimos de Performance operacional (MOPR) para Sistemas de Navegación de Área a bordo, basados en dos DME como sensores
d) ED-40 Especificación Mínima de Performance (MPS) Equipos Navegación Área a bordo que computa la posición usando dos DME como sensores.
e) ED-58 Requisitos Mínimos de Performance operacional (MOPS) para equipos de Navegación de Área usando entradas de Multi- Sensores
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-2-19
f) ED-72A Requisitos Mínimos de Performance operacional MOPS para Equipos receptores GPS
g) ED-76 Estándares Aeronáuticos para el Procesamiento de Datos
h) ED-77 Estándares para la Información Aeronáutica
i) DO-180 Requisitos Mínimos de Performance operacional (MOPS) para equipos de Navegación de Área a bordo Usando una sola entrada de Sensor VOR/DME
j) DO-187 Requisitos Mínimos de Performance operacional (MOPS) para equipos de Navegación de Área a bordo Usando entradas Multi Sensores
k) DO-200 Preparación, Verificación y Distribución de Bases de Datos de Navegación para usuarios seleccionados.
l) DO-201 Recomendaciones para Usuarios de los Servicios de Información Aeronáutica.
m) DO-208 Requisitos Mínimos de Performance operacional MOPS para Equipos de Navegación a bordo suplementario Sistema de Posicionamiento Global (GPS)

II-B-3-1
CAPÍTULO 3
APLICACIÓN RNAV-1 y RNAV-2
INTRODUCCIÓN
Antecedentes
Las Autoridades Conjuntas de Aviación (JAA) publicaron la aprobación de aeronavegabilidad y aprobación operacional para navegación de área de precisión (P-RNAV) el 1 de noviembre de 2000 mediante TGL-10. La Administración Federal de Aviación (FAA) de EE.UU. publicó AC 90-100 operaciones de navegación de área terminal y en ruta (RNAV) el 7 de enero de 2005. Aunque similares en los requisitos funcionales, existen diferencias entre estos dos Documentos. Este capítulo es el resultado de la armonización de los criterios RNAV de los europeos y Estados Unidos en una sola especificación OACI RNAV-1 y 2.
Propósito En este capítulo se proporciona orientación a los Estados y los proveedores de servicios de navegación aérea en ruta y navegación de área terminal en cuanto la aplicación (RNAV). Para los sistemas existentes, el cumplimiento de los P-RNAV (TGL-10) y RNAV (FAA AC 90-100) EE.UU. Asegura el cumplimiento automático de esta especificación de la OACI. El cumplimiento de los operadores con sólo la TGL-10 o AC 90-100 debe referirse a la ruta de migración RNAV-1 y RNAV-2 para confirmar si su sistema automático cumple con la presente especificación. El cumplimiento de la especificación OACI RNAV-1 y 2, ya sea a través de lo anterior evita la necesidad de seguir la evaluación o la Documentación AFM. Además, una aprobación operacional para esta especificación permite a un operador conducir operaciones RNAV-1 y 2 a nivel mundial. Los requisitos de la aeronave para RNAV-1 y 2 son idénticos, mientras que algunos los procedimientos operativos son diferentes. La especificación de navegación RNAV-1 y 2 es aplicable a todas las rutas ATS, incluidas las rutas en el dominio en ruta, salida normalizada por instrumentos (SID), rutas de llegada normalizada (STARS). También se aplica a procedimientos de aproximación por instrumentos hasta el fijo de aproximación final. La especificación de navegación RNAV-1 y 2 es desarrollada principalmente para las operaciones RNAV en un entorno radar (para el SID, la cobertura radar que se espera
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-2
antes del primer cambio de curso RNAV). La especificación de navegación RNP 1 Básica está destinada a operaciones similares fuera de la cobertura de radar. Sin embargo, RNAV-1 y RNAV-2 podrán utilizarse en un ambiente no-radar o por debajo de la altitud mínima de vectorización (MVA) si el Estado garantiza la aplicación de un sistema apropiado de seguridad y las cuentas por falta de monitoreo de la performance y alerta.
Rutas RNAV-1 y RNAV-2 se prevé que se lleven a cabo en entornos de comunicación directa controlador-piloto.
Este capítulo no se ocupa de todos los requisitos que pueden ser especificadas para las distintas operaciones. Estos requisitos se especifican en otros Documentos, tales como normas de operación, las publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales de la OACI (Doc. 7030). Si bien la aprobación operacional se refiere principalmente a los requisitos de navegación del espacio aéreo, los operadores y la tripulación de vuelo todavía son necesarios para tener en cuenta todos los Documentos operativos relativas al espacio aéreo, que son requeridos por la autoridad del Estado, antes de realizar los vuelos dentro el espacio aéreo. CONSIDERACIONES DEL PROVEEDOR DE SERVICIO DE NAVEGACIÓN AÉREA
(ANSP) El ANSP es responsable del desarrollo de la ruta, tal como se describe en el Volumen 1, Parte B, Capítulo 2. Los cambios en la ruta o la infraestructura disponible Ayudas a la Navegación debería realizarse de conformidad con las orientaciones contenidas en ese capítulo.
INFRAESTRUCTURA DE AYUDAS A LA NAVEGACIÓN El diseño de la ruta debe tener en cuenta la performance de navegación, que se puede lograr con la disponibilidad de la infraestructura de Ayudas a la Navegación y las capacidades funcionales exigidos por el presente Documento. Si bien los requisitos de equipo de navegación de las aeronaves para la RNAV-1 y RNAV-2 son idénticas, los impactos de la infraestructura de Ayudas a la Navegación afecta la performance alcanzable. La capacidad de los equipos del usuario debe ser considerados como un objetivo primordial. Los siguientes son los criterios de navegación definidos: GNSS, DME/DME y DME/DME/IRU. Donde el DME es el servicio único de navegación utilizado para las actualizaciones de posición, las lagunas en la cobertura del DME puede impedir la actualización de la posición. Integración de unidades de referencia inercial (IRUs) puede tolerar que se extienda las lagunas en la cobertura.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-3
Nota.- basado en la evaluación del rendimiento la IRU, el crecimiento en el error de la posición de después de revertir a la IRU se puede esperar que sea inferior a 2 NM por 15 minutos. Si no se lleva un IRU, a continuación, la aeronave puede revertir al vuelo a estima. En tales casos, una protección adicional, de acuerdo con los PANS-OPS (Doc. 8168, Volumen II), serán necesarios para atender el aumento del error. A la luz del Plan de Navegación Aérea Mundial para los sistemas CNS/ATM (Doc. 9750), el GNSS debería ser autorizado, siempre que sea posible y las limitaciones sobre el uso de elementos determinados del sistema debe ser evitado. Nota.- La mayoría de los sistemas RNAV más modernos priorizan la entrada del GNSS y, a continuación, el posicionamiento DME/DME. Aunque el posicionamiento VOR/DME se realiza generalmente dentro de un equipo de gestión de vuelo cuando los criterios de posicionamiento DME/DME no existe, la variabilidad de aviónica e infraestructura plantean serios desafíos a la normalización. Por lo tanto, los criterios de este Documento sólo se refieren a los GNSS, DME/DME y DME/DME/IRU. Esto no excluye la realización de operaciones por sistemas que también usan VOR siempre que cumplan los criterios establecidos en las “Especificaciones de Navegación”. La infraestructura de Ayudas a la Navegación debe ser validada por la modelización, y el rendimiento anticipado debe ser adecuadamente evaluado y verificado por la inspección en vuelo. Las evaluaciones deben considerar la capacidad de las aeronaves que se describen en este capítulo. Por ejemplo, una señal DME sólo puede utilizarse si el avión está entre 3 NM y 160 NM de la instalación, por debajo de 40 grados sobre el horizonte (como se ve desde la instalación) y si el DME/DME incluye un ángulo entre 30 grados y 150 grados. La evaluación de la infraestructura DME es simplificada cuando se utiliza una herramienta de proyección que coincide con exactitud de la infraestructura en tierra y el rendimiento de los aviones, así como una representación exacta del terreno. Material de orientación en relación con esta evaluación, se pueden encontrar en los PANS-OPS (Doc. 8168), Volumen II y el Manual sobre Pruebas de Radioayudas para la navegación (Doc. 8071). Las señales DME son considerados para cumplir con las tolerancias de precisión de la señal en el espacio donde se reciben las señales, independientemente de la cobertura del volumen publicado. La intensidad de campo por debajo del requerimiento mínimo, o donde la interferencia de co-canal o canal adyacente pueda existir, son considerados errores del receptor y se analizan en “Requerimientos de las Aeronaves”. Los errores resultantes de multi-trayectoria o de la señal DME deben ser identificados por la ANSP. En caso de que tales errores existan y no son aceptables para la operación, la ANSP puede identificar cuáles no son las Ayudas a la Navegación apropiadas para las aplicaciones RNAV-1 y RNAV-2 (para ser inhibidas por la tripulación de vuelo) o no podrá autorizarse el uso de DME/DME y DME/DME/IRU. Los componentes individuales de la infraestructura de Ayudas a la Navegación deberán ajustarse a los requisitos detallados en el Anexo 10- Comunicaciones Aeronáuticas. Las Ayudas a la navegación que no están conformes con el anexo 10 no deberían ser publicadas en el AIP del Estado. Si los resultados significativos de las diferencias se miden por la publicación de
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-4
una instalación DME, las operaciones RNAV-1 y RNAV-2 en el espacio aéreo afectado por la instalación puede ser necesario limitarse a los GNSS. Para una operación RNAV-1 o 2 cuando se la confía al IRS, algunos sistemas de la aeronave revierten a navegación basada en VOR/DME antes de volver a navegación inercial. El impacto de la exactitud de un radial VOR, cuando el VOR está dentro de 40 NM de la ruta y no hay suficiente infraestructura de Ayudas a la Navegación DME/DME, deben ser evaluados por la ANSP para asegurarse de que no afecta la precisión de posición de la aeronave. El ANSP debería garantizar que los operadores de las aeronaves equipadas con GNSS y, cuando proceda, aeronaves equipadas con SBAS, tengan acceso a un medio de predecir la disponibilidad de detección de fallas utilizando ABAS (por ejemplo, RAIM). Este servicio de predicción puede ser proporcionado por la ANSP, fabricantes de equipos de a bordo u otras entidades. Los servicios de predicción pueden ser para los receptores que reúnen sólo el mínimo de rendimiento TSO o que sean diseños específicos de los receptores. El servicio de predicción debe utilizar la información del estado de los satélites GNSS, y debe usar un límite de alerta horizontal apropiado para la operación (1 NM para RNAV-1 y 2 NM para RNAV-2). Los cortes deben ser identificados en caso de que se pronostique una continua pérdida de ABAS detección de fallos de más de cinco minutos para cualquier parte de la RNAV-1 y las operaciones RNAV-2. Si el servicio predicción no está disponible temporalmente, el ANSP todavía puede permitir que se lleven a cabo operaciones RNAV-1 y RNAV-2, considerando el impacto operacional de aeronaves que informan cortes o el riesgo potencial asociado con una falla de un satélite no detectado cuando la detección de la falla, no está disponible. Desde los sistemas RNAV DME/DME sólo debe utilizar las instalaciones DME señaladas en el AIP del Estado, el Estado debe indicar las instalaciones inapropiadas para operaciones RNAV-1 y RNAV-2 en la AIP, incluyendo estas facilidades asociadas con un ILS o MLS que utilizan un rango compensado. Nota 1.- Los proveedores de Base de datos pueden excluir instalaciones DME cuando las rutas RNAV están fuera del alcance de recepción de estas instalaciones, y que podría tener un efecto perjudicial sobre la solución de navegación de la aeronave en la base de datos de navegación. Nota 2.- En caso de que se produzcan restricciones de carácter temporal, la publicación de las restricciones sobre el uso de DME debe ser realizada por el uso de un NOTAM para determinar la necesidad de excluir el DME.
VIGILANCIA Y COMUNICACIONES ATS Cuando se confía en el uso de radar para ayudar a los procedimientos de contingencia, su rendimiento debe ser adecuado para tal fin, es decir, la cobertura radar, su precisión,
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-5
continuidad y disponibilidad debe ser adecuada para garantizar la separación de RNAV-1 y el RNAV 2 y proporcionar una estructura de rutas ATS de contingencia en los casos en que varios aviones no están en condiciones de lograr la performance de la navegación prescritas en la presente especificación de navegación.
FRANQUEAMIENTO DE OBSTÁCULOS Y ESPACIAMIENTO DE RUTAS La orientación acerca del franqueamiento de obstáculos se ofrece en los PANS-OPS (Doc. 8168, Volumen II); en los criterios generales de las partes I y III. Los Estados miembros podrán prescribir, ya sea un RNAV-1 o RNAV-2 en rutas ATS. El espaciamiento de ruta RNAV-1 y RNAV-2 depende de la configuración de la ruta, la densidad del tránsito aéreo y la capacidad de intervención. Hasta las normas específicas y procedimientos ATM desarrollados, las aplicaciones RNAV-1 y RNAV-2 pueden ser implementadas sobre la base de vigilancia radar ATS.
CONSIDERACIONES ADICIONALES Para el diseño de procedimientos y evaluación de la infraestructura, los límites normales de FTE es de 0,5 NM (RNAV-1) y de 1 NM para (RNAV-2) definida en los procedimientos operativos y se supone que es el 95 por ciento de los valores. Muchos aviones tienen la capacidad para volar una trayectoria paralela, pero compensada a la izquierda o a la derecha, de una ruta activa. El propósito de esta función es permitir las compensaciones para las operaciones tácticas autorizadas por ATC. Muchos aviones tienen la capacidad de ejecutar una maniobra de patrón sostenimiento usando su sistema RNAV. El propósito de esta función es la de proporcionar flexibilidad al ATC en el diseño de las operaciones RNAV. La orientación en este capítulo no reemplaza los requerimientos operacionales del Estado para el equipo.
PUBLICACIÓN El AIP debe indicar claramente si es la aplicación de navegación RNAV-1 o RNAV-2. La ruta debe basarse en perfiles normales de descenso e identificar los requisitos de altitud mínima del segmento. Los datos de navegación publicados en el AIP del Estado para las rutas y las ayudas a la navegación que la soportan deberán cumplir los requisitos de la OACI en el Anexo 15. Todas las rutas deberán basarse en las coordenadas WGS-84. La infraestructura disponible de ayudas a la navegación deben ser claramente designadas en todas las cartas apropiadas (por ejemplo, GNSS, DME/DME y DME/ DME/IRU).
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-6
Cualquier instalación DME que sea crítica para operaciones RNAV-1 o RNAV-2 deben ser identificadas en las correspondientes publicaciones.
ENTRENAMIENTO DE CONTROLADORES Los controladores de tránsito aéreo que proporcionan servicios de control de aproximación RNAV y terminal en espacio aéreo donde se aplica RNAV-1 y RNAV-2, debe haber concluido el entrenamiento que cubre los temas que figuran a continuación: Entrenamiento Básico
a) ¿Cómo trabaja los sistemas de navegación de área (en el contexto de esta especificación de navegación):
I) incluir la capacidad funcional y las limitaciones de esta especificación de navegación;
II) la precisión, integridad, disponibilidad y continuidad;
III) el receptor GPS, RAIM, FDE, la integridad y las alertas;
IV) Conceptos de los puntos de recorrido (waypoint "Fly-by”) de vuelo por versus puntos de recorrido de sobre vuelo (waypoint "Fly-Over”) (y las diferencias en el rendimiento de los virajes);
b) requisitos del plan de vuelo;
c) los procedimientos de ATC:
I) procedimientos de contingencia ATC;
II) las mínimas de separación;
III) ambiente de equipo mixto (impacto de sintonización manual del VOR);
IV) la transición entre los distintos entornos operativos, y
V) la fraseología.
Entrenamiento específico para esta especificación de navegación
a) RNAV STARS, SID:
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-7
I) relacionados con los procedimientos de control;
II) las técnicas de vectorización radar;
III) STARS abiertas y cerradas;
IV) las limitaciones de altitud, y
V) autorizaciones de descensos / ascensos;
b) aproximación RNP y procedimientos relacionados;
c) fraseología relacionada con la RNAV-1 y RNAV-2;
d) efectos de solicitar un cambio de ruta durante un procedimiento.
ESTADO DEL MONITOREO
El estado crítico de la infraestructura de las ayudas a la navegación debe ser monitoreado y, en su caso, mantenido por el proveedor de servicio y oportunas advertencias de los cortes deben expedirse mediante (NOTAMs).
SISTEMA DE MONITOREO ATS
Demostrada la precisión de la navegación, esta proporciona una base para determinar el espaciamiento lateral en ruta y la separación mínima necesaria para el tránsito que opera en una determinada ruta. Cuando estén disponibles, las observaciones por radar de cada aeronave de la proximidad a la trayectoria y la altitud son típicamente observadas por los servicios ATS y se analizan las capacidades de las aeronaves para mantener la trayectoria. Si una observación y análisis indica que una pérdida de separación o franqueamiento de obstáculos se ha ocurrido, la razón de la aparente desviación de la trayectoria nominal o de la altitud debe ser determinada y tomar las medidas para prevenir una recurrencia.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes Esta sección identifica los requisitos de las aeronaves y los procedimientos de operación para RNAV-1 y RNAV-2. El cumplimiento operacional de estos requisitos debería abordarse a través de reglamentos operativos nacionales, y, en algunos casos, pueden requerir una aprobación operacional. Por ejemplo, los JAR-OPS 1 exige a los
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-8
operadores a recurrir a los Estado del operador/Registro, según proceda, para la aprobación operacional.
PROCESO DE APROBACIÓN
Esta especificación de navegación no constituye en sí misma reglamentación, solo material de orientación contra el cual las aeronaves o el operador será evaluado y aprobado. Las aeronaves son certificadas por el Estado de fábrica. Los operadores son aprobados de conformidad con las normas de operación nacional. La especificación de navegación proporciona las técnicas y criterios operacionales, y no implica la necesidad de re certificación. Los siguientes pasos deben ser completados antes de realizar operaciones RNAV-1 y RNAV-2:
a) la elegibilidad de los equipos de a bordo deberá ser determinado y documentado, que puede lograrse tomando crédito para aprobación previa a la categoría P-RNAV o US-RNAV. Una comparación de TGL-10 y AC 90-100 se proporciona en esta sección;
b) los procedimientos operativos para el sistema de navegación que debe utilizarse y los procesos de bases de datos de navegación del operador debe estar debidamente documentado;
c) El entrenamiento de la tripulación de vuelo sobre la base de los procedimientos operativos deben ser documentados;
d) el citado material deberá ser aceptada por la autoridad reguladora del Estado, y
e) la aprobación operacional debe obtenerse de acuerdo con las normas de funcionamiento.
Tras la finalización con éxito de los pasos anteriores, una aprobación operacional RNAV-1 y/o RNAV-2, una Carta de autorización (LOA) o especificación apropiada de operación (Especificaciones de Operaciones), en caso necesario, deberá ser expedido por el Estado. Elegibilidad de Aviones La elegibilidad del avión tiene que ser determinado a través de la demostración de cumplimiento contra los criterios de aeronavegabilidad, por ejemplo, TGL N º 10 o AC 90-100. El OEM o el titular de la homologación de la instalación de la aeronave, por ejemplo, titular STC, demostrará el cumplimiento a su autoridad nacional de aeronavegabilidad (NAA) (por ejemplo, la EASA, FAA) y la aprobación puede ser documentada en la documentación del fabricante (por ejemplo, cartas de servicios). Manual de vuelo del avión (AFM), las entradas no son requeridas siempre que el Estado acepte la documentación del fabricante.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-9
La aprobación operacional La evaluación de un operador en particular es hecha por el Estado del operador / Registro para que el operador y de conformidad con las normas de funcionamiento (por ejemplo, los JAR-OPS 1, 14 CFR Parte 121), con el apoyo y asesoramiento a través de los textos de orientación que se encuentran en los documentos tales como TGL N º 10 y AC 90-100. La evaluación debería tener en cuenta:
a) pruebas de la elegibilidad de aeronaves;
b) la evaluación de los procedimientos operativos para los sistemas de navegación
que se utilice;
c) el control de estos procedimientos aceptables a través de entradas en el
manual de operaciones;
d) la identificación de los requisitos de entrenamiento de la tripulación de vuelo, y
e) en caso necesario, el control de los procesos de las bases de datos de
navegación.
Nota.- Se prevé que una aprobación operativa contra, ya sea TGL N º 10 o AC 90-100 puede conducir a una situación de cumplimiento con los requisitos designados de cualquier ruta RNAV-1 o RNAV-2, con sujeción al proceso de aprobación que se mencionan a continuación. La evaluación, incluida los procedimientos operativos y la capacitación de la tripulación de vuelo, está vinculada a la operación de aeronaves y tener en cuenta las necesidades locales específicas. La aprobación operacional será documentada a través del Estado que aprobó el certificado de operador aéreo (AOC) a través de una carta de autorización (LOA), o especificaciones apropiada de operaciones (especificación de Operación) o enmienda al manual de operaciones. Descripción del equipo de la aeronave El operador deberá disponer de una lista detallada de la configuración de los componentes y los equipos pertinentes que se utilizarán para operaciones RNAV-1 y RNAV-2. Documentación de Entrenamiento
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-10
Los operadores comerciales deben tener un programa de entrenamiento direccionado a las prácticas operacionales, procedimientos y temas de entrenamiento relacionados con las operaciones RNAV-1 y RNAV-2 (por ejemplo entrenamiento periódico para la tripulación de vuelo inicial, actualización o recurrente, así mismo para despachadores y personal de mantenimiento). Nota.- No es necesario establecer un programa de entrenamiento separado o en régimen de entrenamiento RNAV si ya es un elemento integrado de un programa de formación. Sin embargo, debería ser posible identificar los aspectos que son cubiertos dentro de un programa de formación RNAV. Los operadores privados deben estar familiarizados con las prácticas y procedimientos identificados en " conocimiento del piloto y el entrenamiento”. Operaciones manuales y listas de comprobación Operaciones manuales y listas de control para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos normalizados de operación detallado en “Procedimientos Operacionales”. Los manuales apropiados deben contener instrucciones operacionales de navegación y procedimientos de contingencia, si se especifica. Los manuales y listas de chequeo deben ser sometidos a una revisión como parte del proceso de aplicación. Los operadores privados que operan usando las prácticas y procedimientos identificados en "piloto conocimiento y la formación”. Consideraciones de la Lista de equipo mínimo (MEL) Cualquier revisión al MEL necesaria para hacer frente a las disposiciones RNAV-1 y RNAV-2 debe ser aprobada. Los operadores deben ajustar el MEL, o equivalente, y especificar las condiciones de ejecución. Especificaciones de navegación PBN y el proceso de aprobación Las especificaciones de navegación que se encuentran en este manual no constituyen material de orientación de reglamentación en contra de que o bien la aeronave o el operador será evaluado y aprobado. OEM (Fabricante de equipos originales) de sus productos frente a una base de aeronavegabilidad que contiene el código básico para el tipo de aeronave y el material de orientación que tuvo lugar al material de asesoramiento. Los operadores serán aprobados en contra de sus normas de operación. La especificación de navegación proporciona los criterios técnicos y operativos. Por lo tanto, con las operaciones RNAV-1 y RNAV-2 todavía hay una necesidad de contar con un proceso de aprobación, ya sea a través de un documento dedicado de aprobación o mediante el reconocimiento de que existe un documento de certificación RNAV regional (TGL Nº 10 y AC 90-100) puede ser aplicado con las diferencias necesarias, para satisfacer las objetivos establecidos en la especificación de navegación PBN.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-11
Ruta de migración a RNAV-1 y RNAV-2 Los siguientes pasos Identifican el camino a la transición de aprobación RNAV-1 y RNAV-2. Operador titular de la no aprobación El operador que desee volar dentro de espacio aéreo designado como RNAV-1 o RNAV-2:
a) En primer lugar, establecer la elegibilidad de los aviones. Esto puede ser logrado a través de la documentación antes del cumplimiento de los requisitos de la presente especificación de navegación (por ejemplo, el cumplimiento de AC 90-100A, TGL Nº 10 o AC 90-100) y, en segundo lugar, establecer las diferencias para lograr un medio aceptable de cumplimiento de RNAV-1 y RNAV-2. Después de haber pruebas de la elegibilidad de aviones, el operador entonces requerirá obtener la aprobación necesaria de operaciones de la autoridad del Estado que de nuevo se refiere a la documentación existente y los cambios que satisfagan las normas RNAV-1 o RNAV-2.
b) El operador autorizado en contra de los criterios para operaciones RNAV-1 y RNAV-2 es elegible para operar en US-RNAV tipo A y tipo B y en rutas P-RNAV Europeas, no se requiere de más de una aprobación.
c) El operador que desee volar en el espacio aéreo designado para P-RNAV debe obtener una aprobación P-RNAV en contra de la aprobación TGL N º 10.
Operador titular de aprobación P-RNAV El operador que ya sea titular de una aprobación P-RNAV, de conformidad con TGL Nº 10:
a) es elegible para operar en cualquier Estado donde las rutas se basan en TGL-10, y
b) deben obtener una autorización operacional, con las pruebas aportadas contra el cumplimiento de las variaciones de TGL Nº 10 para los criterios de la especificación de navegación RNAV-1 y/o RNAV-2 para volar en espacio aéreo designado como RNAV-1 o RNAV-2. Esto debe ser logrado a través de la aprobación RNAV-1 y/o RNAV-2 utilizando la tabla “Requisitos adicionales para la obtención de una aprobación RNAV-1 y RNAV-2 de acuerdo con la TGL-10”.
Operador titular de aprobación US-RNAV AC 90-100 El operador que ya sea titular de una autorización de conformidad con la FAA AC 90-100:
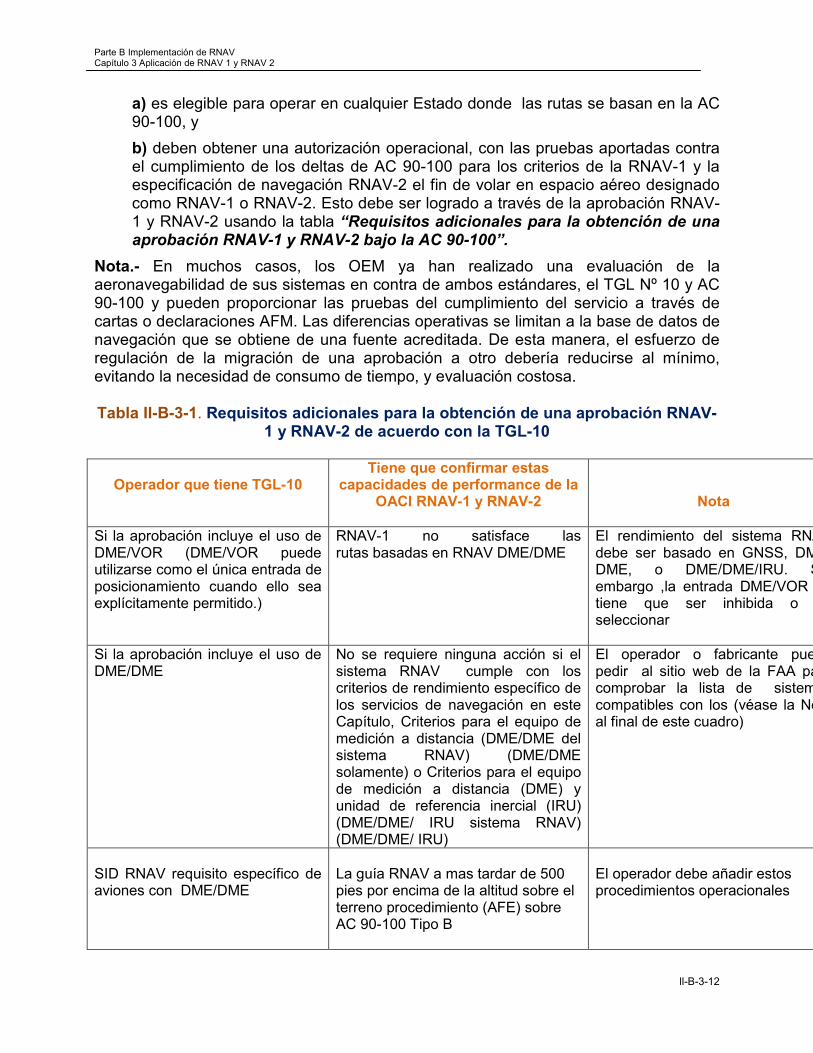
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-12
a) es elegible para operar en cualquier Estado donde las rutas se basan en la AC 90-100, y
b) deben obtener una autorización operacional, con las pruebas aportadas contra el cumplimiento de los deltas de AC 90-100 para los criterios de la RNAV-1 y la especificación de navegación RNAV-2 el fin de volar en espacio aéreo designado como RNAV-1 o RNAV-2. Esto debe ser logrado a través de la aprobación RNAV-1 y RNAV-2 usando la tabla “Requisitos adicionales para la obtención de una aprobación RNAV-1 y RNAV-2 bajo la AC 90-100”.
Nota.- En muchos casos, los OEM ya han realizado una evaluación de la aeronavegabilidad de sus sistemas en contra de ambos estándares, el TGL Nº 10 y AC 90-100 y pueden proporcionar las pruebas del cumplimiento del servicio a través de cartas o declaraciones AFM. Las diferencias operativas se limitan a la base de datos de navegación que se obtiene de una fuente acreditada. De esta manera, el esfuerzo de regulación de la migración de una aprobación a otro debería reducirse al mínimo, evitando la necesidad de consumo de tiempo, y evaluación costosa. Tabla II-B-3-1. Requisitos adicionales para la obtención de una aprobación RNAV-
1 y RNAV-2 de acuerdo con la TGL-10
Operador que tiene TGL-10
Tiene que confirmar estas capacidades de performance de la
OACI RNAV-1 y RNAV-2
Nota
Si la aprobación incluye el uso de DME/VOR (DME/VOR puede utilizarse como el única entrada de posicionamiento cuando ello sea explícitamente permitido.)
RNAV-1 no satisface las rutas basadas en RNAV DME/DME
El rendimiento del sistema RNAV debe ser basado en GNSS, DME/ DME, o DME/DME/IRU. Sin embargo ,la entrada DME/VOR tiene que ser inhibida o seleccionar
Si la aprobación incluye el uso de DME/DME
No se requiere ninguna acción si el sistema RNAV cumple con los criterios de rendimiento específico de los servicios de navegación en este Capítulo, Criterios para el equipo de medición a distancia (DME/DME del sistema RNAV) (DME/DME solamente) o Criterios para el equipo de medición a distancia (DME) y unidad de referencia inercial (IRU) (DME/DME/ IRU sistema RNAV) (DME/DME/ IRU)
El operador o fabricante puede pedir al sitio web de la FAA para comprobar la lista de sistemas compatibles con los (véase la Nota al final de este cuadro)
SID RNAV requisito específico de aviones con DME/DME
La guía RNAV a mas tardar de 500 pies por encima de la altitud sobre el terreno procedimiento (AFE) sobre AC 90-100 Tipo B
El operador debe añadir estos procedimientos operacionales
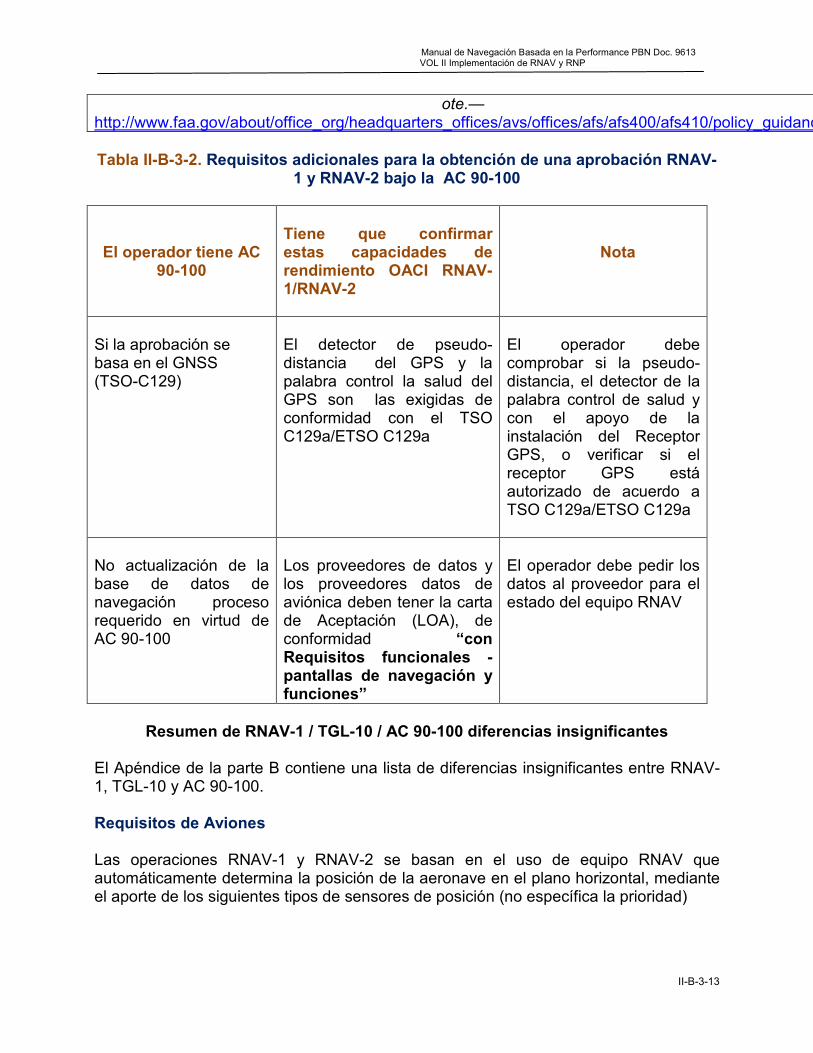
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-13
ote.— http://www.faa.gov/about/office_org/headquarters_offices/avs/offices/afs/afs400/afs410/policy_guidance/ Tabla II-B-3-2. Requisitos adicionales para la obtención de una aprobación RNAV-
1 y RNAV-2 bajo la AC 90-100 El operador tiene AC
90-100
Tiene que confirmar estas capacidades de rendimiento OACI RNAV-1/RNAV-2
Nota
Si la aprobación se basa en el GNSS (TSO-C129)
El detector de pseudo-distancia del GPS y la palabra control la salud del GPS son las exigidas de conformidad con el TSO C129a/ETSO C129a
El operador debe comprobar si la pseudo-distancia, el detector de la palabra control de salud y con el apoyo de la instalación del Receptor GPS, o verificar si el receptor GPS está autorizado de acuerdo a TSO C129a/ETSO C129a
No actualización de la base de datos de navegación proceso requerido en virtud de AC 90-100
Los proveedores de datos y los proveedores datos de aviónica deben tener la carta de Aceptación (LOA), de conformidad “con Requisitos funcionales - pantallas de navegación y funciones”
El operador debe pedir los datos al proveedor para el estado del equipo RNAV
Resumen de RNAV-1 / TGL-10 / AC 90-100 diferencias insignificantes
El Apéndice de la parte B contiene una lista de diferencias insignificantes entre RNAV-1, TGL-10 y AC 90-100. Requisitos de Aviones Las operaciones RNAV-1 y RNAV-2 se basan en el uso de equipo RNAV que automáticamente determina la posición de la aeronave en el plano horizontal, mediante el aporte de los siguientes tipos de sensores de posición (no específica la prioridad)
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-14
a) Sistema mundial de navegación por satélite (GNSS), de conformidad con la FAA TSO-C145, TSO-C146, o TSO-C129. Los datos de posicionamiento de otros tipos de sensores de navegación pueden ser integrados con el GNSS y otros datos proporcionados no provocar errores en los datos de la posición que excedan los requisitos de precisión total del sistema. La utilización de equipos GNSS homologados con la TSO-C129 se limita a estos sistemas que incluyen las funciones mínimas especificadas en “Requisitos funcionales - pantallas de navegación y funciones” Como mínimo, la integridad debe ser proporcionada por un sistema de aumentación basado en la aeronave. Además, el equipo TSO-C129 debe incluir las siguientes funciones:
i) Detección de paso de pseudo-distancias;
ii) Verificación de la palabra salud;
b) equipo RNAV DME/DME de acuerdo con los criterios que figuran en “Criterios para el equipo de medición de distancia (sistema RNAV DME/DME)”, y
c) equipos RNAV DME/DME/IRU que cumplan con los criterios que figuran en “Criterios para el equipo de medición a distancia (DME) y unidad de referencia inercial (IRU) (DME/DME/IRU sistema RNAV)”.
El Performance del sistema, monitoreo y la alerta Precisión: Durante las operaciones en espacio aéreo o en rutas designadas como RNAV-1, el error lateral total del sistema debe estar dentro ± 1 NM al menos el 95 por ciento del total de tiempo de vuelo. El error a lo largo de la trayectoria de también debe estar dentro de ± 1 NM al menos el 95 por ciento del total de tiempo de vuelo. Durante las operaciones en espacio aéreo o en rutas designadas como RNAV-2, el error lateral total del sistema debe ser de ± 2 NM al menos el 95 por ciento del total de tiempo de vuelo. El error a lo largo de la trayectoria también debe estar dentro de ± 2 NM al menos el 95 por ciento del total de tiempo de vuelo. Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como una falla mayor en virtud de la condición de aeronavegabilidad reglamentaria (es decir, 10-5 por hora). Continuidad: La Pérdida de la función está clasificada como una condición de fallo menor si el operador puede volver a otro sistema de navegación y proceder a un aeropuerto. Señal en el espacio: Durante las operaciones en el espacio aéreo o en rutas designadas como RNAV-1 si se usa el GNSS, el equipos de navegación de la aeronave deberá presentar una alerta si la probabilidad de los errores de la señal en el espacio causa un error de posición lateral superior 2 NM y supera 10-7 por hora. (Anexo 10, Volumen I, Tabla 3.7.2.4-1). Durante las operaciones en el espacio aéreo o en las rutas
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-15
designadas como RNAV-2 si se usa GNSS, el equipo de navegación de la aeronave deberá presentar una alerta si la probabilidad de los errores de la señal en el espacio causan un error lateral de la posición superior a 4 NM y supera 10-7 por hora. (Anexo 10, Volumen I, Tabla 3.7.2.4-1).
Criterios específicos para los servicios de navegación
Criterios para el GNSS Los siguientes sistemas cumplen los requerimientos de precisión de estos criterios:
a) Las aeronaves con sensor TSO-C129/C129a (Clase B o C) y con los requisitos de un FMS TSO C115b, instalado para uso IFR de acuerdo con la AC 20-130A de la FAA; b) las aeronaves con el sensor TSO-C145 y con los requisitos de un FMS TSO-C115b, instalado para el uso IFR IAW FAA AC 20-130A o AC 20-138A; c) las aeronaves con TSO-C129/C129a clase A1 (sin desviación de la funcionalidad descrita en “requerimientos Funcionales — pantallas de navegación y funciones”, instalado para uso IFR IAW FAA AC 20-138 o AC 20-138A, y d) las aeronaves con el TSO-C146 (sin desviación de la funcionalidad descrita en “requerimientos Funcionales — pantallas de navegación y funciones” de este documento), instalado para uso IFR IAW AC 20-138A.
Para las rutas y/o aprobaciones de aeronaves que requieren el GNSS, si el sistema de navegación no alerta automáticamente a la tripulación de vuelo para una pérdida de del GNSS, el operador debe elaborar procedimientos para verificar el correcto funcionamiento del GNSS. Datos de posicionamiento de otros tipos de sensores de navegación puede ser integrado con el GNSS, los datos proporcionados de otros datos de posicionamiento no causan errores de posición superior a la del error total del sistema (TSE) presupuestado. En caso contrario, los medios se deberían proporcionar a deseleccionar los otros tipos de sensores de navegación.
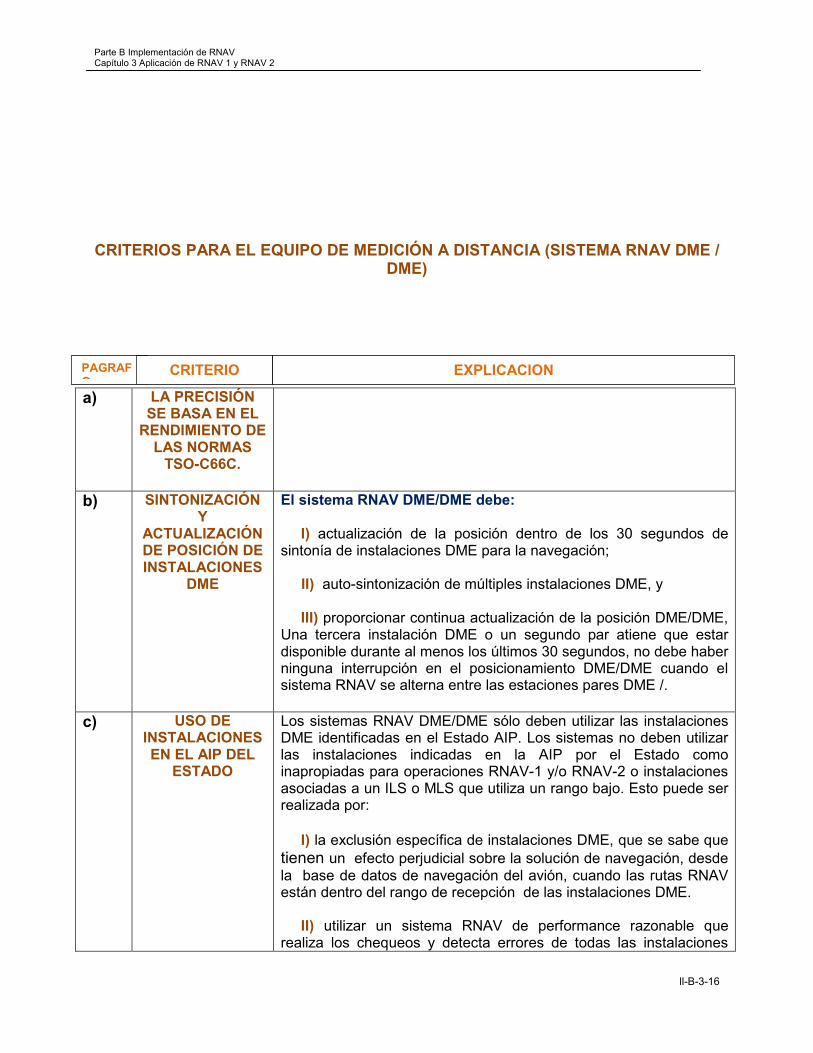
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-16
CRITERIOS PARA EL EQUIPO DE MEDICIÓN A DISTANCIA (SISTEMA RNAV DME /
DME)
a) LA PRECISIÓN SE BASA EN EL RENDIMIENTO DE LAS NORMAS TSO-C66C.
b) SINTONIZACIÓN Y
ACTUALIZACIÓN DE POSICIÓN DE INSTALACIONES
DME
El sistema RNAV DME/DME debe: I) actualización de la posición dentro de los 30 segundos de sintonía de instalaciones DME para la navegación;
II) auto-sintonización de múltiples instalaciones DME, y
III) proporcionar continua actualización de la posición DME/DME, Una tercera instalación DME o un segundo par atiene que estar disponible durante al menos los últimos 30 segundos, no debe haber ninguna interrupción en el posicionamiento DME/DME cuando el sistema RNAV se alterna entre las estaciones pares DME /.
c) USO DE INSTALACIONES EN EL AIP DEL
ESTADO
Los sistemas RNAV DME/DME sólo deben utilizar las instalaciones DME identificadas en el Estado AIP. Los sistemas no deben utilizar las instalaciones indicadas en la AIP por el Estado como inapropiadas para operaciones RNAV-1 y/o RNAV-2 o instalaciones asociadas a un ILS o MLS que utiliza un rango bajo. Esto puede ser realizada por: I) la exclusión específica de instalaciones DME, que se sabe que tienen un efecto perjudicial sobre la solución de navegación, desde la base de datos de navegación del avión, cuando las rutas RNAV están dentro del rango de recepción de las instalaciones DME.
II) utilizar un sistema RNAV de performance razonable que realiza los chequeos y detecta errores de todas las instalaciones
PAGRAFO
CRITERIO EXPLICACION
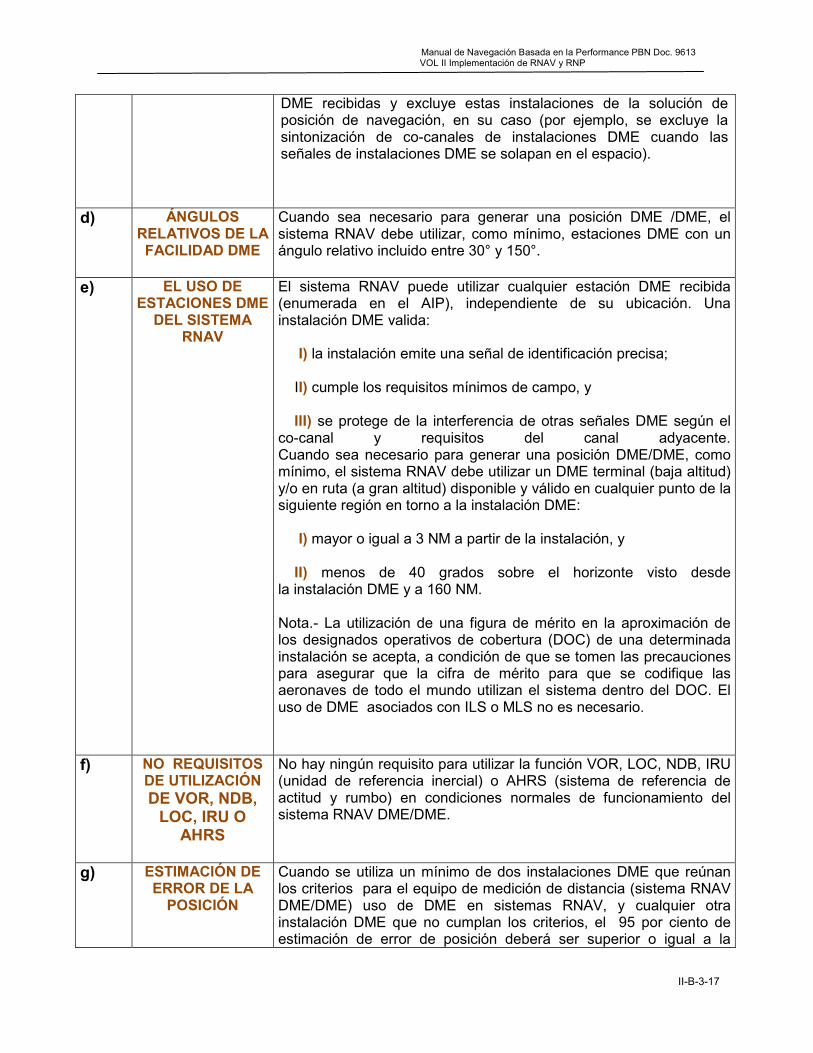
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-17
DME recibidas y excluye estas instalaciones de la solución de posición de navegación, en su caso (por ejemplo, se excluye la sintonización de co-canales de instalaciones DME cuando las señales de instalaciones DME se solapan en el espacio).
d) ÁNGULOS RELATIVOS DE LA FACILIDAD DME
Cuando sea necesario para generar una posición DME /DME, el sistema RNAV debe utilizar, como mínimo, estaciones DME con un ángulo relativo incluido entre 30° y 150°.
e) EL USO DE ESTACIONES DME
DEL SISTEMA RNAV
El sistema RNAV puede utilizar cualquier estación DME recibida (enumerada en el AIP), independiente de su ubicación. Una instalación DME valida: I) la instalación emite una señal de identificación precisa;
II) cumple los requisitos mínimos de campo, y
III) se protege de la interferencia de otras señales DME según el co-canal y requisitos del canal adyacente. Cuando sea necesario para generar una posición DME/DME, como mínimo, el sistema RNAV debe utilizar un DME terminal (baja altitud) y/o en ruta (a gran altitud) disponible y válido en cualquier punto de la siguiente región en torno a la instalación DME:
I) mayor o igual a 3 NM a partir de la instalación, y
II) menos de 40 grados sobre el horizonte visto desde la instalación DME y a 160 NM. Nota.- La utilización de una figura de mérito en la aproximación de los designados operativos de cobertura (DOC) de una determinada instalación se acepta, a condición de que se tomen las precauciones para asegurar que la cifra de mérito para que se codifique las aeronaves de todo el mundo utilizan el sistema dentro del DOC. El uso de DME asociados con ILS o MLS no es necesario.
f) NO REQUISITOS DE UTILIZACIÓN DE VOR, NDB, LOC, IRU O
AHRS
No hay ningún requisito para utilizar la función VOR, LOC, NDB, IRU (unidad de referencia inercial) o AHRS (sistema de referencia de actitud y rumbo) en condiciones normales de funcionamiento del sistema RNAV DME/DME.
g) ESTIMACIÓN DE ERROR DE LA POSICIÓN
Cuando se utiliza un mínimo de dos instalaciones DME que reúnan los criterios para el equipo de medición de distancia (sistema RNAV DME/DME) uso de DME en sistemas RNAV, y cualquier otra instalación DME que no cumplan los criterios, el 95 por ciento de estimación de error de posición deberá ser superior o igual a la
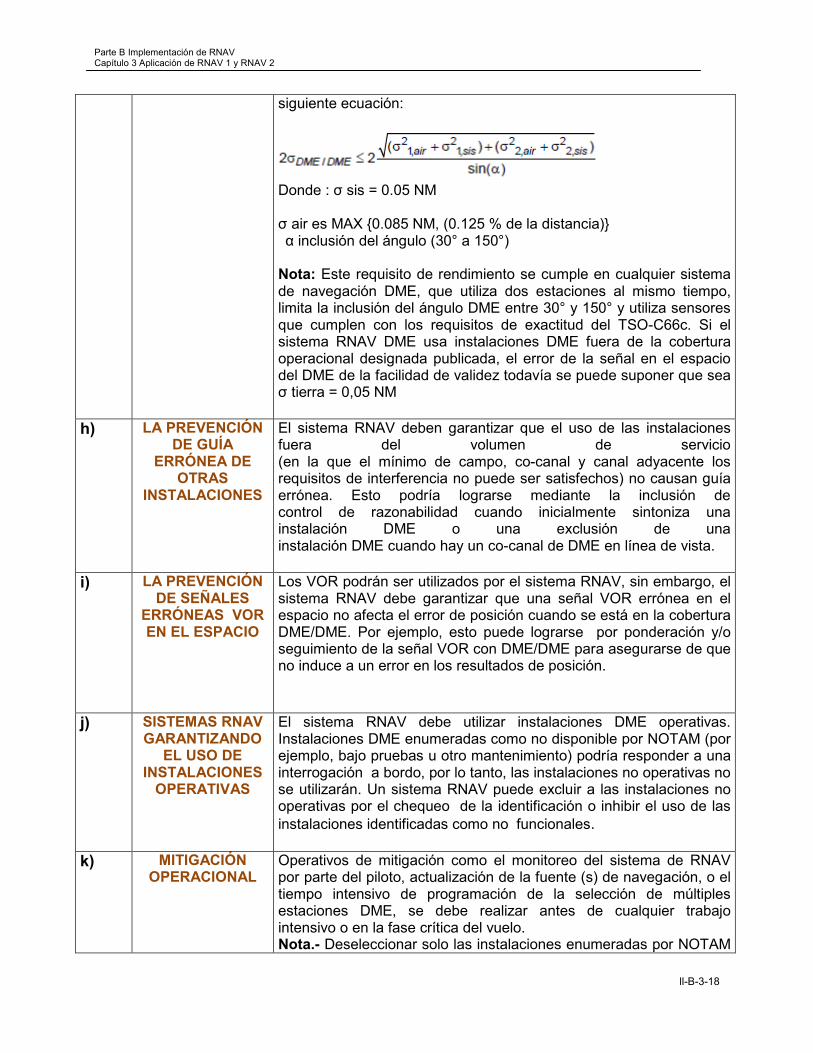
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-18
siguiente ecuación:
Donde : σ sis = 0.05 NM σ air es MAX {0.085 NM, (0.125 % de la distancia)} α inclusión del ángulo (30° a 150°) Nota: Este requisito de rendimiento se cumple en cualquier sistema de navegación DME, que utiliza dos estaciones al mismo tiempo, limita la inclusión del ángulo DME entre 30° y 150° y utiliza sensores que cumplen con los requisitos de exactitud del TSO-C66c. Si el sistema RNAV DME usa instalaciones DME fuera de la cobertura operacional designada publicada, el error de la señal en el espacio del DME de la facilidad de validez todavía se puede suponer que sea σ tierra = 0,05 NM
h) LA PREVENCIÓN DE GUÍA
ERRÓNEA DE OTRAS
INSTALACIONES
El sistema RNAV deben garantizar que el uso de las instalaciones fuera del volumen de servicio (en la que el mínimo de campo, co-canal y canal adyacente los requisitos de interferencia no puede ser satisfechos) no causan guía errónea. Esto podría lograrse mediante la inclusión de control de razonabilidad cuando inicialmente sintoniza una instalación DME o una exclusión de una instalación DME cuando hay un co-canal de DME en línea de vista.
i) LA PREVENCIÓN DE SEÑALES
ERRÓNEAS VOR EN EL ESPACIO
Los VOR podrán ser utilizados por el sistema RNAV, sin embargo, el sistema RNAV debe garantizar que una señal VOR errónea en el espacio no afecta el error de posición cuando se está en la cobertura DME/DME. Por ejemplo, esto puede lograrse por ponderación y/o seguimiento de la señal VOR con DME/DME para asegurarse de que no induce a un error en los resultados de posición.
j) SISTEMAS RNAV GARANTIZANDO
EL USO DE INSTALACIONES OPERATIVAS
El sistema RNAV debe utilizar instalaciones DME operativas. Instalaciones DME enumeradas como no disponible por NOTAM (por ejemplo, bajo pruebas u otro mantenimiento) podría responder a una interrogación a bordo, por lo tanto, las instalaciones no operativas no se utilizarán. Un sistema RNAV puede excluir a las instalaciones no operativas por el chequeo de la identificación o inhibir el uso de las instalaciones identificadas como no funcionales.
k) MITIGACIÓN OPERACIONAL
Operativos de mitigación como el monitoreo del sistema de RNAV por parte del piloto, actualización de la fuente (s) de navegación, o el tiempo intensivo de programación de la selección de múltiples estaciones DME, se debe realizar antes de cualquier trabajo intensivo o en la fase crítica del vuelo. Nota.- Deseleccionar solo las instalaciones enumeradas por NOTAM
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-19
como fuera de servicio y/o programación de ruta definida con DME "crítico" es aceptable cuando la mitigación no requiere acción piloto durante una fase crítica de vuelo. Un requisito de programación no implica que el piloto también deba completar la introducción manual de instalaciones DME que no están en la base de datos de navegación.
l) CONTROLES DE RAZONABILIDAD
Muchos sistemas RNAV realizan una prueba de razonabilidad para validar las mediciones DME. Los controles de razonabilidad son muy efectivos contra los errores de la base de datos o adquisiciones erróneas de del sistema (como instalaciones co-canal), y se dividen normalmente en dos clases: I) las que utiliza el sistema RNAV después de que adquiere un nuevo DME, donde compara la posición de la aeronave antes de utilizar el DME o el alcance de la aeronave al DME, y
II) las que el sistema RNAV utiliza continuamente, sobre la base de información redundante (por ejemplo, señales DME adicionales o datos IRU). Requisitos generales. Los controles de razonabilidad están destinados a evitar que las ayudas a la navegación que se utilizan para la navegación en las áreas de actualización donde los datos pueden llevar a errores de posición de radio debido a la interferencia co-canal, el multitrayecto, y señales directas ocultas. En lugar de utilizar volumen publicado de servicio de radio ayudas para la navegación, el sistema de navegación debería proporcionar los controles que impiden el uso de duplicar la frecuencia de las ayudas a la navegación dentro de los límites, ayudas a la navegación sobre el horizonte, y el uso de ayudas a la navegación con geometría pobre. Supuestos. Bajo las siguientes condiciones, los chequeos de razonabilidad pueden ser invalidas: I) Una señal DME no sólo siguen siendo válida, ya que era válida cuando se adquirió. II) señales extras de DME pueden no estar disponibles. La intención de esta especificación es para soportar las operaciones donde la infraestructura es mínima (por ejemplo, cuando sólo dos DME están disponibles para las partes de la ruta). Haciendo hincapié en las condiciones de uso para probar la eficacia. Cuando una verificación de razonabilidad se utiliza para satisfacer cualquier requisito de estos criterios, la eficacia del control debe ser probado en condiciones de estrés. Un ejemplo de esta condición es una señal de DME que es válido en la adquisición y rampas de despegue durante la prueba (similar a lo que en una instalación de prueba puede hacer), cuando sólo hay un apoyo a otras dos señales DME o de la igualdad intensidad.
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-20
Criterios para el equipo de medición a distancia (DME) y unidad de referencia inercial (IRU)
(sistema RNAV DME/DME/IRU)
En esta sección se definen las disposiciones mínimas de DME/DME/IRU (o D/D/I) rendimiento de referencia del sistema RNAV. El desempeño normalizado de posicionamiento para el DME/ DME se detallan en Criterios para el equipo de medición a distancia (sistema RNAV DME/ DME) Parágrafo Criterio Explicación a) El rendimiento del sistema
inercial debe satisfacer los criterios de 14 CFR EE.UU. Parte 121, Apéndice G.
b) Capacidad de actualización automática de la posición del DME/DME la solución es requerida.
Nota.- Los operadores / pilotos deberán ponerse en contacto con los fabricantes para discernir si algún anuncio del inercial navegando cerca a la costa es suprimida tras la pérdida de la radio actualización.
c) Dado que algunos sistemas de la aeronave se revierten a la navegación basada en VOR/DME antes de volver a la inercial, el impacto de la exactitud del radial VOR, cuando el VOR está a más de 40 NM de la aeronave, no debe afectar la precisión de la posición de la aeronave.
Una manera de lograr este objetivo es que los sistemas RNAV excluyan los VOR’s cuya distancia sea superior a 40 NM desde la aeronave.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-21
REQUISITOS FUNCIONALES - PANTALLAS DE NAVEGACIÓN Y FUNCIONES
Parágrafo
Requisitos Funcionales Explicación
a) Los datos de navegación, incluyendo una indicación FROM/TO y un indicador de falla, deberán aparecer en la pantalla de desviación lateral (CDI, (E) HSI) y/o una pantalla mapa de navegación. Estos deben ser utilizados como instrumentos principales de vuelo para la navegación de la aeronave, para maniobra de anticipación y para indicación de falla/estado/integridad. Deberán responder a las siguientes requisitos:
No pantallas de desviación lateral numéricas (por ejemplo, CDI, (S) HSI), con una indicación FROM/TO y un anuncio de falla, para su uso como instrumento primario de vuelo para la navegación de la aeronave, para la maniobra de anticipación, y para la indicación falla/estado/integridad, con los siguientes cinco atributos: 1) La pantalla debe ser visible para el piloto y situado en el campo principal de visión (± 15 grados de la línea de visión normal del piloto) cuando se mira hacia adelante a lo largo de la trayectoria de vuelo; 2) La pantalla de desviación lateral debe mostrar la escala de acuerdo con cualquier anuncio de alerta y límite, si se aplican;
3) La pantalla de desviación lateral debetener una escala amplia adecuada para la fase actual de vuelo y debe estar basada en la precisión total del sistema requerida; 4) La escala de la pantalla puede ser ajustada automáticamente por defecto lógico o un valor establecido obtenido a partir de una base de datos de navegación. El valor total de la deflexión de la escala debe ser conocida o deben estar disponibles para su visualización en consonancia con el piloto, en ruta, terminal, o un valor en aproximación; 5) La desviación lateral de la pantalladebe ser automáticamente esclavizada a la ruta RNAV calculada. El selector de curso de la desviación de la pantalla debe ser esclavizada automáticamente a la ruta RNAV calculada. Como un medio alterno para un mapa de navegación debe dar una funcionalidad equivalente a una desviación lateral de la pantalla como se describe en Requisitos funcionales -
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-22
pantallas de navegación y funciones parágrafo a) (Explicación 1-5), con las correspondientes escalas de mapas (la escala puede fijarse manualmente por el piloto), y dando una funcionalidad equivalente a una desviación lateral de la pantalla. Nota.- El número de aviones modernos pueden optar a esta especificación de utilizar un mapa de visualización como un método aceptable para cumplir con los requisitos establecidos.
b) Las siguientes son las funciones que el sistema requiere, como mínimo, dentro de cualquier equipoRNAV-1 o RNAV-2:
1) La capacidad de mostrar continuamente al piloto que vuelo, en los instrumentos primarios de de vuelo para la navegación de la aeronave (pantalla principal de navegación), la trayectoria RNAV deseada calculada y la posición de la aeronave en relación con la trayectoria. Para las operaciones donde lo mínimo requerido en la tripulación de vuelo es de dos pilotos, los medios para que el piloto que no vuela verifique la trayectoria deseada de la aeronave y la posición en relación con la trayectoria deben ser también proporcionados.
2) Una base de datos de navegación, con un contenido actualizado de la navegación promulgada oficialmente por la aviación civil, la cual puede ser actualizada, de acuerdo con el ciclo de regulación y control de la información aeronáutica (AIRAC) y de las rutas ATS que pueden ser recuperados y cargados en el sistema RNAV. La resolución de los datos almacenados debe ser suficiente para lograr una definición de error insignificante en la trayectoria. La base de datos deben ser protegidos contra la modificación experimental del piloto de los datos almacenados.
3) Los medios para mostrar el período de validez de la los datos de navegación al piloto.
4) Los medios para recuperar y visualizar los datos almacenados en la base de datos de navegación relativos a los puntos de recorrido y ayudas a la navegación, a fin de que el piloto verifique la ruta a volar.
5) La capacidad de carga de la base de datos en el sistema RNAV todos los segmento RNAV de la SID o STAR a volar.
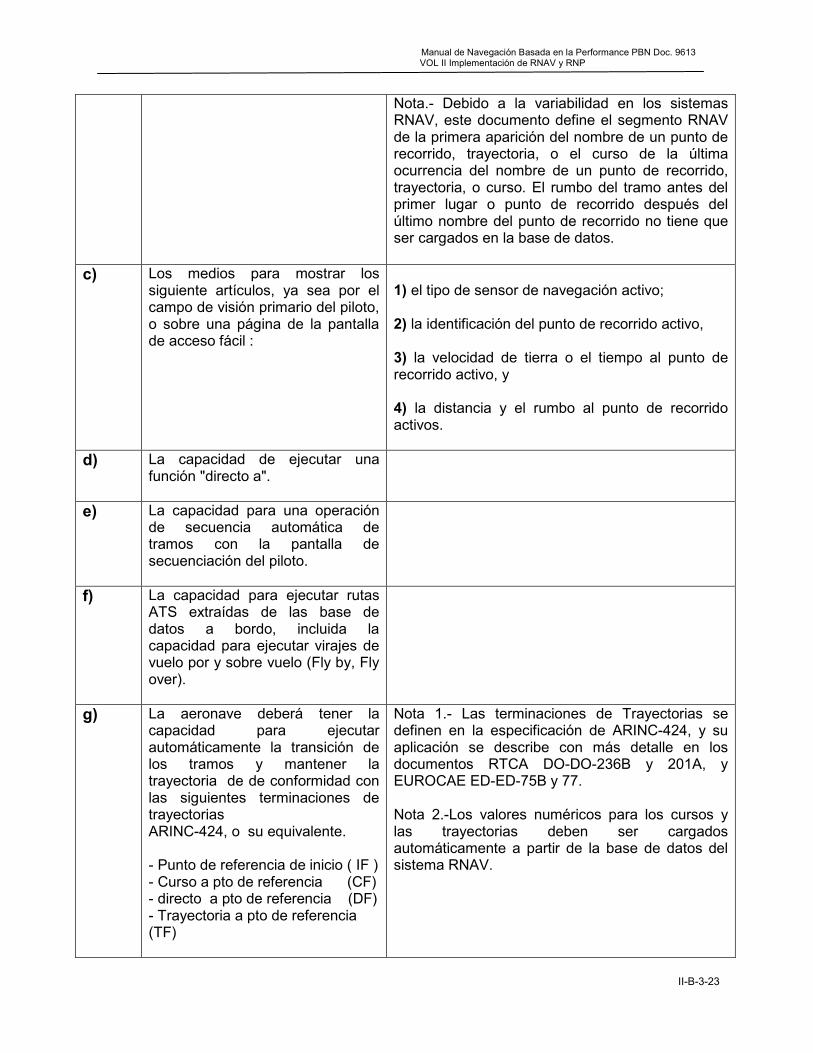
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-23
Nota.- Debido a la variabilidad en los sistemas RNAV, este documento define el segmento RNAV de la primera aparición del nombre de un punto de recorrido, trayectoria, o el curso de la última ocurrencia del nombre de un punto de recorrido, trayectoria, o curso. El rumbo del tramo antes del primer lugar o punto de recorrido después del último nombre del punto de recorrido no tiene que ser cargados en la base de datos.
c) Los medios para mostrar los siguiente artículos, ya sea por el campo de visión primario del piloto, o sobre una página de la pantalla de acceso fácil :
1) el tipo de sensor de navegación activo;
2) la identificación del punto de recorrido activo,
3) la velocidad de tierra o el tiempo al punto de recorrido activo, y
4) la distancia y el rumbo al punto de recorrido activos.
d) La capacidad de ejecutar una función "directo a".
e) La capacidad para una operación de secuencia automática de tramos con la pantalla de secuenciación del piloto.
f) La capacidad para ejecutar rutas ATS extraídas de las base de datos a bordo, incluida la capacidad para ejecutar virajes de vuelo por y sobre vuelo (Fly by, Fly over).
g) La aeronave deberá tener la capacidad para ejecutar automáticamente la transición de los tramos y mantener la trayectoria de de conformidad con las siguientes terminaciones de trayectorias ARINC-424, o su equivalente. - Punto de referencia de inicio ( IF ) - Curso a pto de referencia (CF) - directo a pto de referencia (DF) - Trayectoria a pto de referencia (TF)
Nota 1.- Las terminaciones de Trayectorias se definen en la especificación de ARINC-424, y su aplicación se describe con más detalle en los documentos RTCA DO-DO-236B y 201A, y EUROCAE ED-ED-75B y 77. Nota 2.-Los valores numéricos para los cursos y las trayectorias deben ser cargados automáticamente a partir de la base de datos del sistema RNAV.
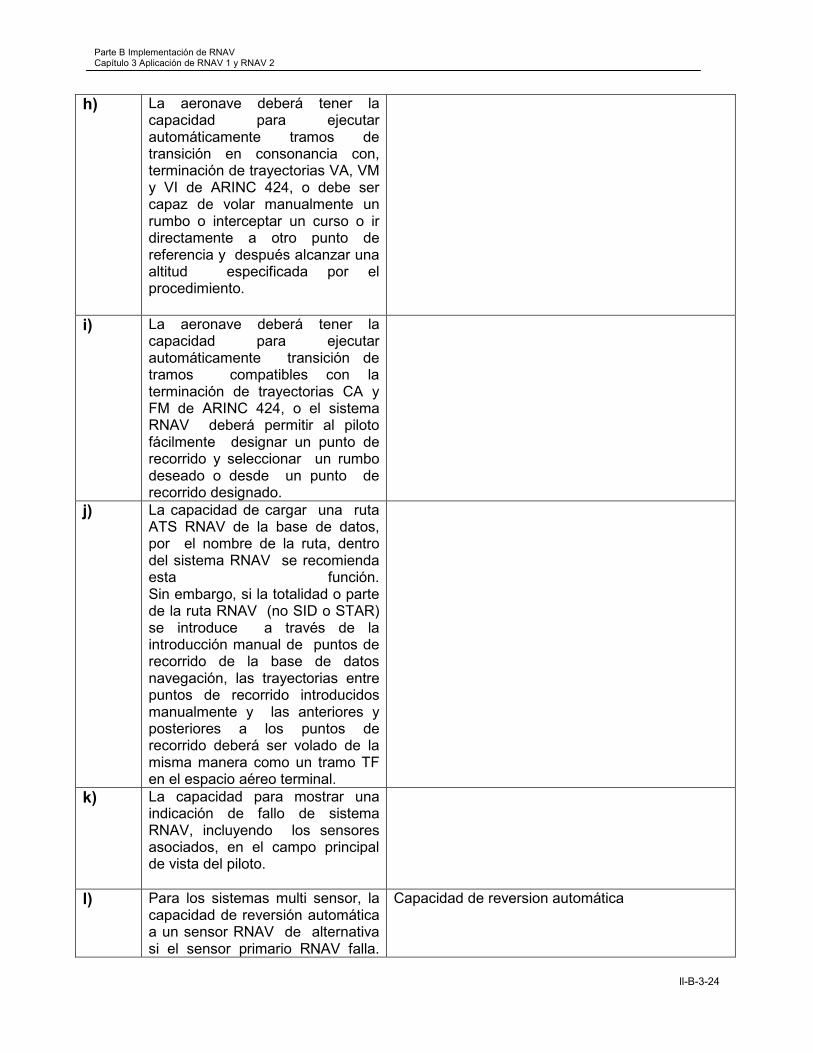
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-24
h) La aeronave deberá tener la capacidad para ejecutar automáticamente tramos de transición en consonancia con, terminación de trayectorias VA, VM y VI de ARINC 424, o debe ser capaz de volar manualmente un rumbo o interceptar un curso o ir directamente a otro punto de referencia y después alcanzar una altitud especificada por el procedimiento.
i) La aeronave deberá tener la capacidad para ejecutar automáticamente transición de tramos compatibles con la terminación de trayectorias CA y FM de ARINC 424, o el sistema RNAV deberá permitir al piloto fácilmente designar un punto de recorrido y seleccionar un rumbo deseado o desde un punto de recorrido designado.
j) La capacidad de cargar una ruta ATS RNAV de la base de datos, por el nombre de la ruta, dentro del sistema RNAV se recomienda esta función. Sin embargo, si la totalidad o parte de la ruta RNAV (no SID o STAR) se introduce a través de la introducción manual de puntos de recorrido de la base de datos navegación, las trayectorias entre puntos de recorrido introducidos manualmente y las anteriores y posteriores a los puntos de recorrido deberá ser volado de la misma manera como un tramo TF en el espacio aéreo terminal.
k) La capacidad para mostrar una indicación de fallo de sistema RNAV, incluyendo los sensores asociados, en el campo principal de vista del piloto.
l) Para los sistemas multi sensor, la capacidad de reversión automática a un sensor RNAV de alternativa si el sensor primario RNAV falla.
Capacidad de reversion automática
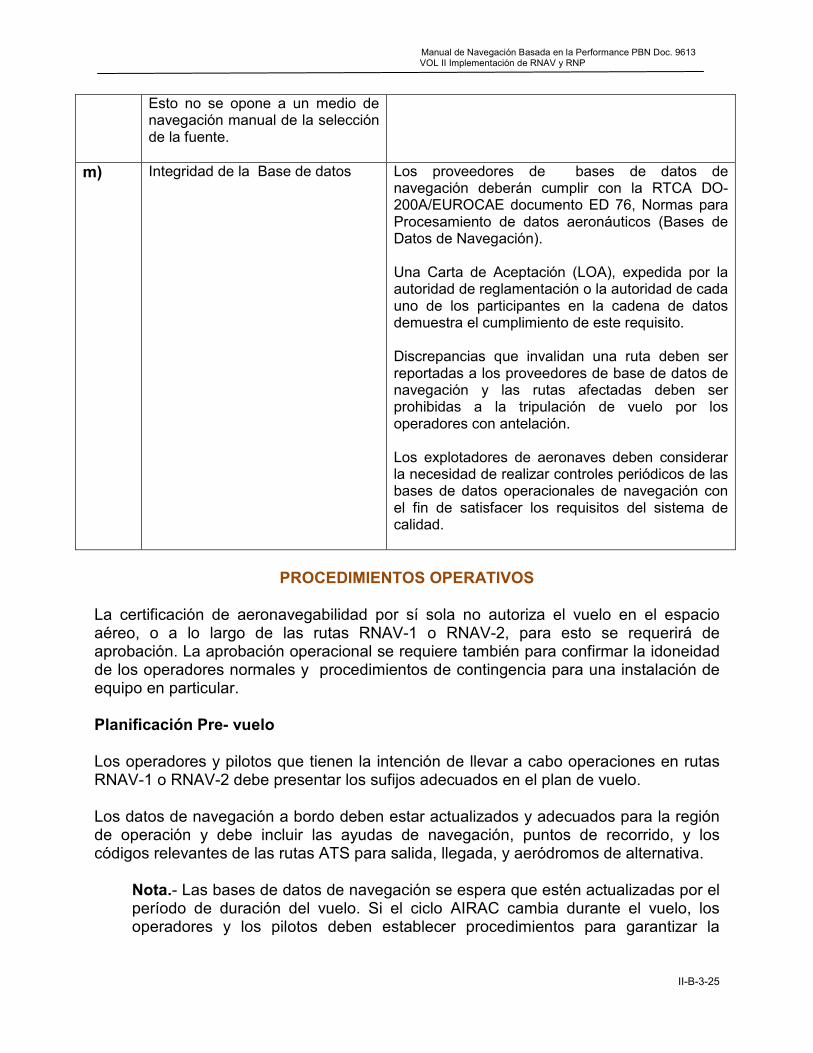
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-25
Esto no se opone a un medio de navegación manual de la selección de la fuente.
m) Integridad de la Base de datos
Los proveedores de bases de datos de navegación deberán cumplir con la RTCA DO-200A/EUROCAE documento ED 76, Normas para Procesamiento de datos aeronáuticos (Bases de Datos de Navegación). Una Carta de Aceptación (LOA), expedida por la autoridad de reglamentación o la autoridad de cada uno de los participantes en la cadena de datos demuestra el cumplimiento de este requisito. Discrepancias que invalidan una ruta deben ser reportadas a los proveedores de base de datos de navegación y las rutas afectadas deben ser prohibidas a la tripulación de vuelo por los operadores con antelación. Los explotadores de aeronaves deben considerar la necesidad de realizar controles periódicos de las bases de datos operacionales de navegación con el fin de satisfacer los requisitos del sistema de calidad.
PROCEDIMIENTOS OPERATIVOS
La certificación de aeronavegabilidad por sí sola no autoriza el vuelo en el espacio aéreo, o a lo largo de las rutas RNAV-1 o RNAV-2, para esto se requerirá de aprobación. La aprobación operacional se requiere también para confirmar la idoneidad de los operadores normales y procedimientos de contingencia para una instalación de equipo en particular. Planificación Pre- vuelo Los operadores y pilotos que tienen la intención de llevar a cabo operaciones en rutas RNAV-1 o RNAV-2 debe presentar los sufijos adecuados en el plan de vuelo. Los datos de navegación a bordo deben estar actualizados y adecuados para la región de operación y debe incluir las ayudas de navegación, puntos de recorrido, y los códigos relevantes de las rutas ATS para salida, llegada, y aeródromos de alternativa.
Nota.- Las bases de datos de navegación se espera que estén actualizadas por el período de duración del vuelo. Si el ciclo AIRAC cambia durante el vuelo, los operadores y los pilotos deben establecer procedimientos para garantizar la

Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-26
exactitud de los datos de navegación, incluida la adecuación de las instalaciones de navegación utilizadas para definir las rutas y los procedimientos de vuelo.
La disponibilidad de la infraestructura de ayudas a la navegación, requerida para la ruta destinada, incluida cualquier contingencia no-RNAV, deberán ser confirmadas durante el período de operación utilizando toda la información disponible. Desde la integridad del GNSS (RAIM o señal SBAS) es requerido por el Anexo 10, Volumen I, la disponibilidad de estos también debe ser determinada como apropiado. En las aeronaves con receptores de navegación SBAS (todos TSO-C145/C146), los operadores deben comprobar la adecuada disponibilidad GPS RAIM en las zonas donde la señal SBAS no está disponible. Disponibilidad de Sistema de Aumentación Basada en Aeronave (ABAS) Los niveles RAIM necesarios para RNAV-1 y RNAV-2 pueden ser verificados a través de cualquier NOTAMs (donde esté disponible) o a través de los servicios de predicción. La autoridad de operaciones ofrecen orientaciones concretas sobre la manera de cumplir con este requisito (por ejemplo, si se dispone de suficientes satélites, una predicción puede no ser necesaria). Los operadores deben estar familiarizados con la información disponible de la predicción para la ruta prevista. La disponibilidad de predicción RAIM debe tener en cuenta los últimos NOTAMs de la constelación GPS (NANUs) y modelos de aviónica (si están disponibles). El servicio puede ser proporcionado por la ANSP, fabricantes de aviónica y de otras entidades o a través de un receptor con capacidad de predicción RAIM. En el caso de que se pronostique una continua pérdida de nivel adecuado de detección de fallos por más de cinco minutos para cualquier parte de la operación RNAV-1 o RNAV-2, el plan de vuelo debe ser revisado (por ejemplo, retrasando la salida o planificación de un procedimiento de salida diferente). El software de predicción de disponibilidad RAIM no garantiza el servicio, que son más bien herramientas para evaluar la capacidad esperada de hacer frente a la performance de navegación requerida. Debido a la falta imprevista de algunos elementos del GNSS, pilotos / ANSP deben darse cuenta de que la navegación GPS RAIM o pueden perderse por completo mientras se está en vuelo y pueden requerir reversión a un medio alterno de navegación. Por lo tanto, los pilotos deben evaluar su capacidad para navegar (potencialmente a un sistema de alternativa) en caso de fallo de la navegación GPS. Disponibilidad de Equipos de medición de distancia (DME) Para la navegación basada en el DME, los NOTAMs deben verificarse para comprobar el estado de los DME críticos. Los pilotos deben evaluar su capacidad para navegar (potencialmente a un sistema de alternativa) en caso de fallo del DME crítico, mientras se está en vuelo.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-27
Procedimientos generales de funcionamiento El piloto debe cumplir con las instrucciones o procedimientos señalados por el fabricante, según sea necesario para cumplir con los requisitos de desempeño en este capítulo. Los operadores y los pilotos no deberían solicitar o clasificar rutas RNAV-1 y RNAV-2 a menos que se cumplan todos los criterios en los documentos de Estado. Si una aeronave que no se ajusten a estos criterios recibe una autorización del ATC para llevar a cabo una ruta RNAV, el piloto deberá informar al ATC que él / ella es incapaz de aceptar la solicitud y deberá solicitar instrucciones alternas. En la inicialización del sistema, los pilotos deben confirmar si la base de datos de navegación esta actualizada y verificar que la posición de la aeronave ha sido introducida correctamente. Los pilotos deben comprobar la correcta inscripción de la ruta asignado por el ATC de la autorización inicial y cualquier cambio ulterior de ruta. Los pilotos deben garantizar la secuencia de puntos de recorrido, representado por su sistema de navegación y si coincide con la ruta que se muestra en la carta apropiada y si corresponde con la ruta asignada. Los pilotos no deben volar un RNAV-1 o RNAV-2, SID o STAR si no es recuperable por el nombre de la ruta o procedimiento de la base de datos de navegación a bordo y conforme a la ruta trazada en la carta de navegación. Sin embargo, la ruta puede ser modificada posteriormente a través de la inserción o supresión de los puntos de recorrido específicos en respuesta a las autorizaciones del ATC. La entrada manual, o la creación de nuevos puntos de recorrido entrados manualmente, de latitud y longitud o valores rho/theta no está permitido. Adicionalmente, los pilotos no deben cambiar cualquier tipo de punto de recorrido Fly-by a Fly over o viceversa dentro de la base de datos RNAV para el SID o STAR Siempre que sea posible, las rutas RNAV-1 y RNAV-2 en el dominio en ruta deben ser extraídas de la base de datos en su totalidad, en lugar de cargar los puntos de recorrido (way points) de la base de datos en el plan de vuelo. Sin embargo, es permite seleccionar e insertar individualmente puntos de recorrido desde la base de datos de navegación como FIX nombrados, con tal que todos los puntos de referencia a lo largo de la ruta publicada a ser volada estén insertados. Por otra parte, la ruta puede ser modificada posteriormente a través de la inserción o supresión de los puntos de recorrido específicos en respuesta a las autorizaciones ATC. La creación de nuevos puntos de recorrido por la introducción manual de latitud y la longitud o valores rho/theta no está permitido. Las tripulaciones de vuelo deben hacer un chequeo cruzado del plan de vuelo autorizado mediante la comparación de las cartas u otros recursos aplicables con el sistema de navegación, con pantalla de texto y pantallas de mapas de la aeronave, en
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-28
su caso. Si es necesario, la exclusión de determinadas ayudas a la navegación debe ser confirmada.
Nota.- Los pilotos pueden notar una ligera diferencia entre la información de navegación publicada en la carta y su pantalla principal de navegación. Las diferencias de 3º o menos puede ser el resultado de la aplicación de la declinación magnética por el fabricante de equipos y operacionalmente aceptable.
Durante el vuelo, cuando sea factible, la tripulación de vuelo deben utilizar los datos disponibles desde las ayudas a la navegación de base terrestre para confirmar la razonabilidad de navegación. Para las rutas RNAV-2, los pilotos deben utilizar un indicador de desviación lateral, director de vuelo o piloto automático en el modo de navegación lateral. Los pilotos podrán utilizar un mapa de navegación con una funcionalidad equivalente a la desviación lateral del indicador, como se describe en el (cuadro requisitos funcionales punto a) subíndices 1 al 5), sin un director de vuelo o piloto automático. Para las rutas RNAV-1, los pilotos deben utilizar un indicador de desviación lateral, director de vuelo, piloto automático, o en el modo de navegación lateral. Los pilotos de aeronaves con una desviación lateral de la pantalla debe garantizar que la escala de desviación lateral es adecuada para la precisión de la navegación asociadas con la ruta o procedimiento (por ejemplo, la totalidad de la escala: ± 1 NM RNAV para 1, ± 2 NM para RNAV-2, o de ± 5 NM TSO-C129 (equipo para rutas RNAV-2). Se espera que todos los pilotos mantengan ejes nominales de la ruta, como lo describe a bordo los indicadores de desviación lateral y/o el guiado de vuelo RNAV en todas las operaciones descritas en este manual, a menos que sea autorizado por ATC para desviarse o en condiciones de emergencia. Para las operaciones normales, el error perpendicular a la derrota/desviación (la diferencia entre la trayectoria calculada por el sistema RNAV y la posición relativa de la aeronave, es decir, FTE) debe limitarse a ± ½ de la precisión asociada a la navegación con el procedimiento o la ruta (es decir, 0,5 NM para RNAV-1, 1,0 NM para RNAV-2). Breves desviaciones de este estándar (por ejemplo, overshoots o undershoots) durante e inmediatamente después del viraje en un procedimiento/ruta, hasta un máximo de una vez de la precisión de navegación (es decir, de 1,0 NM RNAV-1, de 2,0 NM RNAV-2), es permitido.
Nota.- Algunas aeronaves no muestran o calculan una trayectoria durante el viraje, por lo tanto, los pilotos de estas aeronaves no pueden ser capaces de adherirse a la precisión lateral de ±½ de la precisión de navegación durante los virajes del procedimiento/ruta, pero aún se espera que satisfagan los estándares de viraje durante la intercepción del siguiente segmento en línea recta.
Si las cuestiones del ATC en la asignación de un rumbo teniendo la aeronave fuera de una ruta, el piloto no debe modificar el plan de vuelo en el sistema RNAV hasta que una
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-29
autorización es recibida para reincorporarse a la ruta o el controlador confirma una nueva autorización de ruta. Cuando la aeronave no está en la ruta publicada, el requisito de precisión especificado no se aplica. El banqueo manualmente seleccionado de la aeronave limita funciones y puede reducir la capacidad de la aeronave a fin de mantener la trayectoria deseada y no es recomendado. Los pilotos deben reconocer que la selección manualmente del banqueo de la aeronave limita funciones que podría reducir la capacidad de satisfacer las expectativas de trayectoria del ATC, sobre todo cuando se ejecutan ángulos de viraje grandes. Esto no debería ser interpretado como un requisito para desviarse de los procedimientos del manual de vuelo de la aeronave, sino que los pilotos deberían ser alentados a limitar la selección de las funciones dentro de los procedimientos. Requisitos específicos de SID RNAV Antes de iniciar el despegue, el piloto de la aeronave debe verificar que el sistema RNAV está disponible y funcionando correctamente, y el aeropuerto correcto y los datos de la pista estén cargados. Antes de vuelo, los pilotos deben comprobar que el sistema de navegación de la aeronave este en correcto funcionamiento y la pista correcta para el procedimiento de salida (incluida cualquier transición aplicable en ruta) es entrada y se muestra correctamente. A los Pilotos que se les asigna un procedimiento RNAV de salida y, posteriormente, reciben un cambio de pista, el procedimiento o transición debe verificarse los cambios apropiados introducidos y disponibles para la navegación antes del despegue. Una última comprobación de la correcta entrada de pista y representación de la ruta correcta, poco antes del despegue, es recomendado. Obligación de altitud RNAV. El piloto debe ser capaz de utilizar los equipos RNAV para seguir la guía de vuelo para RNAV lateral a más tardar en 153 m (500 pies) por encima de la elevación del aeropuerto. La altitud a la que comienza la orientación RNAV sobre un habida cuenta de la ruta puede ser mayor (por ejemplo, ascenso a 1000 pies) y luego directo a. Los pilotos deben utilizar un método autorizado (indicador de desviación lateral / pantalla de mapa de navegación/ director de vuelo y piloto automático) para lograr un nivel adecuado de rendimiento para RNAV-1 Aeronaves con DME/DME. Los pilotos de aeronaves sin GPS, utilizando sensores DME/DME sin entrada IRU, no puede usar su sistema RNAV hasta que el avión ha entrado en la cobertura adecuada de DME. El proveedor de servicios de navegación aérea (ANSP) deben garantizar una adecuada cobertura DME está disponible en cada SID RNAV (DME/DME) a una altura aceptable. El tramo inicial del SID puede ser definido basado en rumbo. Las aeronaves con DME/DME/IRU (D/D/I). Los pilotos de aeronaves sin GPS, utilizando sistemas RNAV DME/DME con un IRU (DME/DME/IRU), el sistema de navegación de las aeronaves deben garantizar que la posición es confirmada, dentro de
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-30
1 000 pies (0,17 NM) de una posición conocida, en el punto de partida del recorrido de la carrera de despegue. Esto es logrado generalmente por el uso de una función de actualización de pista manual o automática. Un mapa de navegación también pueden utilizarse para confirmar la posición de la aeronave, si el procedimiento del piloto y la resolución de la pantalla permiten el cumplimiento del requisito de los 1 000 pies de tolerancia.
Nota.- basado sobre la evaluación del rendimiento de la IRU, el crecimiento del error de la posición después de revertir al IRU se puede esperar que sea inferior a 2NM por 15 minutos.
Aeronaves con GNSS. Al utilizar los GNSS, la señal debe ser adquirida antes de que comience la carrera de despegue. Para las aeronaves que utilicen equipo TSO-C129/C129A, el aeropuerto de salida debe ser cargada en el plan de vuelo a fin de lograr la adecuada supervisión del sistema de navegación y la sensibilidad. Para las aeronaves que utilicen aviónica TSO-C145a/C146a, si el salida comienza en un punto de recorrido de la pista, entonces el aeropuerto de salida no tiene que estar en el plan de vuelo para obtener una supervisión adecuada y la sensibilidad. Requisitos específicos para RNAV STAR Antes de la fase de llegada, la tripulación de vuelo debe verificar que la ruta correcta terminal se haya cargado. El plan de vuelo activo debe verificarse mediante la comparación de las listas con la visualización del mapa (si procede) y el MCDU. Esto incluye la confirmación de la secuencia de los puntos de recorrido, el carácter razonable de ángulos de la trayectoria y distancias, cualquier altitud o limitaciones de la velocidad, y, cuando sea posible, puntos de recorrido que sean "fly-by y fly-over. Si son requeridos por una ruta, un chequeo deberá hacerse para confirmar que la actualización se excluye de una ayuda a la navegación en particular. Una ruta no debe utilizarse si existe duda en cuanto a la validez de la ruta en la base de datos de navegación.
Nota.- Como mínimo, el chequeo de la llegada podría ser una simple inspección de un mapa en pantalla que consiga los objetivos de este apartado.
La creación de nuevos puntos de recorrido de entrada manual al sistema RNAV por la tripulación de vuelo invalidaría la ruta y no está permitido. En caso de que el procedimiento de contingencia requiere la reversión a una ruta de llegada convencional, los preparativos necesarios deben ser completados antes del comienzo de la ruta RNAV. Las modificaciones de la ruta en el área terminal puede tomar la forma de rumbos radar o autorizaciones "directo a" y la tripulación de vuelo debe ser capaz de reaccionar de manera oportuna. Esto puede incluir la inserción de puntos de recorrido tácticos cargados desde la base de datos. La entrada manual o la modificación por la tripulación de vuelo de la ruta cargada, utilizando puntos de recorrido temporales o puntos de referencia que no figuraban en la base de datos, no están permitidas.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-31
Los pilotos deben comprobar que su sistema de navegación está funcionando correctamente y el procedimiento correcto de llegada y la pista (incluyendo cualquier transición aplicable) se introducen y se muestran correctamente. Aunque un método en particular no es mandado, cualquier altitud publicada y limitación de velocidad debe ser observada. Procedimientos de contingencia El piloto debe notificar al ATC de cualquier pérdida de la capacidad RNAV, junto con el curso de acción propuesto. Si es incapaz de cumplir con los requisitos de una ruta RNAV, los pilotos deben avisar a los ATS, tan pronto como sea posible. La pérdida de la capacidad RNAV incluye cualquier fallo o hecho causante de que la aeronave ya no cumplen los requisitos de la ruta RNAV. En el caso de fallo de las comunicaciones, la tripulación de vuelo debe continuar con la ruta RNAV de conformidad con lo establecido en los procedimientos de pérdida de comunicaciones. Conocimiento del Piloto y Entrenamiento Los siguientes temas deben ser abordados en el programa de capacitación del piloto (por ejemplo, el simulador, dispositivos de entrenamiento, o aeronaves) para el sistema RNAV de aeronaves:
a) la información de este capítulo;
b) el significado y el uso adecuado del equipo de la aeronave / sufijos de navegación;
c) las características del procedimiento como está determinado en la representación cartográfica y la descripción textual;
d) descripción de los tipos de puntos de recorrido (Fly-by, Fly-over) y las terminaciones de trayectorias (previstas en “Requerimientos Funcionales” de acuerdo a terminaciones de trayectorias de ARINC 424) y cualquier otro tipo utilizados por el operador, así como rutas de vuelo de aviones asociados;
e) equipo de navegación requeridos para la operación en rutas RNAV/SID/ STAR, por ejemplo, DME/DME, DME/DME/IRU, y el GNSS;
f) información específica del sistema RNAV:
I) los niveles de automatización, modos de anuncios, los cambios, alertas, interacciones, reversiones, y la degradación;
II) la integración funcional con otros sistemas de la aeronave;
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-32
III) el significado y la conveniencia de discontinuidades de la ruta, así como los procedimientos relacionados con la tripulación de vuelo;
IV los procedimientos del piloto coherentes con la operación;
V) los tipos de sensores de navegación (por ejemplo, DME, IRU,GNSS) utilizados por el sistema RNAV y asociados al sistema de priorización / peso / lógica;
VI) anticipación de virajes en consideración a la velocidad y efectos de la altitud;
VII) la interpretación de pantallas electrónicas y los símbolos;
VIII) la comprensión de la configuración de la aeronave y las condiciones operativas necesarias para apoyar operaciones RNAV, es decir, una selección adecuada de la escala del CDI (desviación lateral de la escala de visualización);
g) procedimientos operacionales de los equipos RNAV, según proceda, incluida la forma de realizar las siguientes acciones:
I) verificar la integridad actual de los datos de navegación de la aeronave;
II) verificar la finalización con éxito de las autos pruebas del sistema RNAV;
III) inicializar la posición del sistema de navegación;
IV) recuperar y volar un SID o un STAR con la adecuada transición;
V) adherirse a las limitaciones de velocidad y/o altitud asociada con un SID o STAR;
VI) seleccionar el apropiado SID o STAR para la pista en uso activo y estar familiarizado con los procedimientos para hacer frente a un cambio de pista;
VII) realizar una actualización manual o automática (con el cambio de posición del punto despegue, si es aplicable);
VIII) verificar los puntos de recorrido y programación del plan de vuelo;
IX) volar directo a un punto de recorrido;
X) volar a un curso/trayectoria a un punto de recorrido;
XI) interceptar un curso/ trayectoria;
XII) volar vectores de radar y reincorporarse a una ruta RNAV desde el modo "rumbo";
XII) determinar el error perpendicular a la derrota/desviación. Más concretamente, la máximo desviación permitida para apoyar operaciones RNAV y debe entenderse y respetarse;
XIV) resolver discontinuidades de ruta;
XV) remover y deseleccionar la entrada del sensor de navegación;
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-33
XVI) cuando sea necesario, confirmar la exclusión de una ayuda para la navegación o el tipo de ayuda a la navegación;
XII) cuando sea requerido por la autoridad aeronáutica del Estado, realice los chequeos de errores graves de navegación usando ayudas convencionales a la navegación;
XVIII) cambiar llegada al aeropuerto y aeropuerto de alternativa;
XIX) desempeñará las funciones de compensación paralela si existe la capacidad.
Los pilotos deben saber cómo se aplican las compensaciones, la funcionalidad de su sistema RNAV y la necesidad de avisar al ATC si esta funcionalidad no está disponible;
XX) realizar funciones de esperas RNAV;
h) los niveles recomendados del operador de la fase de automatización de vuelo y el volumen de trabajo, incluidos los métodos para reducir al mínimo los errores perpendiculares a la trayectoria y mantener la ruta centrada;
i) fraseología R/T para aplicaciones RNAV/RNP
j) procedimientos de contingencia para fallos RNAV/RNP.
Base de datos de navegación La base de datos de navegación se debe obtener de un proveedor que cumpla con RTCA DO 200A/EUROCAE documento ED 76 de las Normas para procesamiento de datos aeronáuticos y debe ser compatible con la función del equipo (Anexo 6, Parte 1, Capítulo 7). Una carta de aceptación (LOA), expedido por la autoridad de reglamentación a cada uno de los participantes en la cadena de datos, que demuestre el cumplimiento de este requisito (por ejemplo, una carta de aceptación de la FAA expedida de conformidad con la AC 20-153 de la FAA o Una carta de aceptación de EASA expedida de conformidad con la EASA IR 21 sub parte G). Las discrepancias que invalidan una ruta deben ser comunicadas al proveedor de la base de datos de navegación y las rutas afectadas deben ser prohibidas por un operador mediante un aviso a su tripulación de vuelo. Los explotadores de aeronaves deben considerar la necesidad de realizar controles periódicos de las bases de datos operacionales de navegación a fin de satisfacer los requisitos de calidad del sistema. Los sistemas RNAV DME/DME sólo deben de utilizar las instalaciones DME identificadas por el Estado en el AIP. Los sistemas no deben utilizar las instalaciones indicadas por el Estado como inadecuado en la AIP para operaciones RNAV-1 y RNAV-2 o instalaciones relacionadas con un ILS o MLS que utiliza un rango compensado. Esto se puede lograr con la exclusión de las instalaciones específicas DME, que se sabe que tienen un efecto perjudicial sobre la solución de navegación, a partir de la
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-34
base de datos de navegación del avión, cuando las rutas RNAV están dentro del rango de la recepción de estas instalaciones de DME. Supervisión de los operadores Una autoridad reguladora podrá considerar cualquier informe de errores de navegación en la determinación de las medidas correctivas. Ocurrencias repetidas de errores de navegación atribuidas a una pieza específica del equipo de navegación puede resultar en la cancelación de la aprobación para la utilización de dicho equipo. La información que indica el potencial de repetir los errores puede requerir una modificación del programa de entrenamientos del operador. La información que atribuye a múltiples errores de un piloto de la tripulación puede requerir entrenamiento correctivo o revisión de la licencia.
REFERENCIAS Copias de documentos de EUROCAE pueden ser compradas a EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia (Fax: +33 1 46 55 62 65). Sitio web: www.eurocae.eu Copias de documentos de la FAA pueden ser obtenidas a partir de Superintendente de Documentos, Government Printing Office, Washington, DC 20402-9325, EE.UU.. Sitio web: http://www.faa.gov/aircraft_cert/ (Biblioteca de Orientación y de regulación) Copias de los documentos RTCA pueden ser obtenidas de RTCA Inc., 1140 Connecticut Avenue, NW, Suite 1020, Washington, DC 20036-4001, EE.UU., (Tel.: 1 202 833 9339). Sitio web: www.rtca.org Copias de los documentos ARINC pueden ser obtenidas de Aeronautical Radio, Inc., 2551 Riva Road, Annapolis, Maryland 24101-7435, EE.UU.. Sitio web: http://www.arinc.com Copias de documentos JAA JAA están disponibles en el editor de Information Handling Services (IHS). Información sobre los precios, dónde y cómo realizar un pedido, está disponible en el sitio web de las JAA: http://www.jaa.nl y en el IHS sitios web: http://www.global.his.com y http://www.avdataworks.com Copias de documentos de la EASA puede obtenerse de la EASA (Agencia Europea de Seguridad Aérea), 101253, D-50452 Koln, Alemania. Copias de los documentos de la OACI pueden ser adquiridos en la Organización de Aviación Civil Internacional, Servicios al Cliente Unidad, 999 University Street, Montreal, Quebec, Canadá H3C 5H7, (Fax: +1 514-954-6769 o por e-mail:
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-35
[email protected]) oa través de agentes de venta que figuran en el sitio web de la OACI: www.icao.int
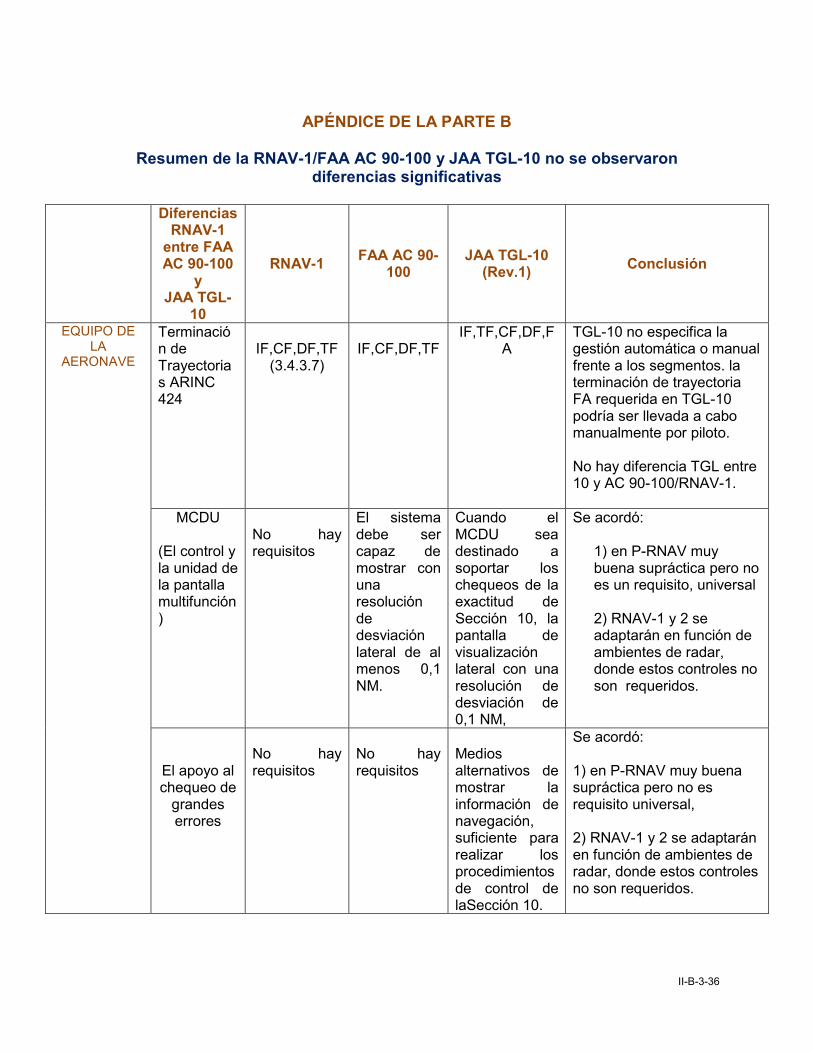
II-B-3-36
APÉNDICE DE LA PARTE B
Resumen de la RNAV-1/FAA AC 90-100 y JAA TGL-10 no se observaron
diferencias significativas
Diferencias RNAV-1 entre FAA AC 90-100
y JAA TGL-
10
RNAV-1 FAA AC 90-
100 JAA TGL-10
(Rev.1) Conclusión
Terminación de Trayectorias ARINC 424
IF,CF,DF,TF (3.4.3.7)
IF,CF,DF,TF
IF,TF,CF,DF,FA
TGL-10 no especifica la gestión automática o manual frente a los segmentos. la terminación de trayectoria FA requerida en TGL-10 podría ser llevada a cabo manualmente por piloto. No hay diferencia TGL entre 10 y AC 90-100/RNAV-1.
MCDU (El control y la unidad de la pantalla multifunción)
No hay requisitos
El sistema debe ser capaz de mostrar con una resolución de desviación lateral de al menos 0,1 NM.
Cuando el MCDU sea destinado a soportar los chequeos de la exactitud de Sección 10, la pantalla de visualización lateral con una resolución de desviación de 0,1 NM,
Se acordó: 1) en P-RNAV muy buena supráctica pero no es un requisito, universal 2) RNAV-1 y 2 se adaptarán en función de ambientes de radar, donde estos controles no son requeridos.
EQUIPO DE LA
AERONAVE
El apoyo al chequeo de grandes errores
No hay requisitos
No hay requisitos
Medios alternativos de mostrar la información de navegación, suficiente para realizar los procedimientos de control de laSección 10.
Se acordó: 1) en P-RNAV muy buena supráctica pero no es requisito universal,
2) RNAV-1 y 2 se adaptarán en función de ambientes de radar, donde estos controles no son requeridos.

Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-37
requisito específico para STAR RNAV
Antes de la fase de llegada, el la tripulación de vuelo debe verificar que la ruta terminal los sea correcta y haya sido cargada.
No hay requisitos
Antes de la fase de llegada, el la tripulación de vuelo debe verificar que la ruta terminal los sea correcta y haya sido cargada.
Cubiertos en AC 90-100 una cuestión general en lugar de llegadas específicas: " la tripulación de Vuelo deberá hacer la comprobación cruzada del plan de vuelo autorizado en contra de las cartas u otros recursos aplicables, asi como sistemas de visualización de la navegación en texto y mapas de la aeronave, si aplica. No hay discrepancia.
Requisitos Operacional
es
requisito específico para STAR RNAV
La creación de nuevos puntos de recorrido entrados de forma manual al sistema RNAV por la tripulación de vuelo invalidaría la ruta y no está permitido.
No hay requisitos
La creación de nuevos puntos de recorrido entrados de forma manual al sistema RNAV por la tripulación de vuelo invalidaría el procedimiento P-RNAV y no está permitido.
La AC 90-100 especifica que: "La capacidad de carga de dentro de la base de datos en sistema RNAV todo segmento del sistema RNAV de procedimiento (s) SID o STAR a ser volado. “Y los pilotos no debe volar un SID o STAR RNAVa menos que sea recuperable por el nombre del procedimiento de la base de datos navegación de a bordo y se ajusta a el procedimiento trazado en la carta". La FAA no incluyo la prohibición de alterar el plan de vuelo en el equipo, como el procedimiento de la autorización ATC puede ser modificada el en algunos circunstancias. No hay discrepancia.
Cuando los procedimientos de contingencia requieren la
No hay requisitos
Cuando la contingencia revierte a un procedimiento de llegada
Bajo la TGL-10, tal contingencia se requiere por debajo de la MOCA o fuera de la cobertura radar.
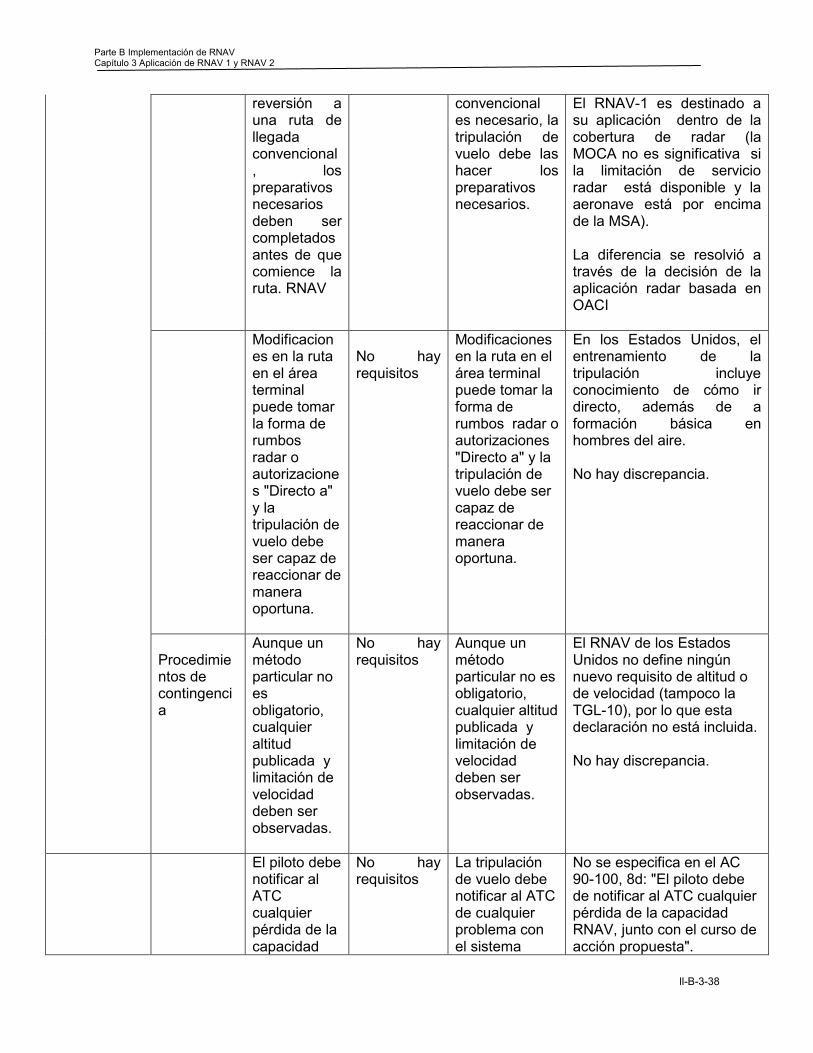
Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-38
reversión a una ruta de llegada convencional, los preparativos necesarios deben ser completados antes de que comience la ruta. RNAV
convencional es necesario, la tripulación de vuelo debe las hacer los preparativos necesarios.
El RNAV-1 es destinado a su aplicación dentro de la cobertura de radar (la MOCA no es significativa si la limitación de servicio radar está disponible y la aeronave está por encima de la MSA). La diferencia se resolvió a través de la decisión de la aplicación radar basada en OACI
Modificaciones en la ruta en el área terminal puede tomar la forma de rumbos radar o autorizaciones "Directo a" y la tripulación de vuelo debe ser capaz de reaccionar de manera oportuna.
No hay requisitos
Modificaciones en la ruta en el área terminal puede tomar la forma de rumbos radar o autorizaciones "Directo a" y la tripulación de vuelo debe ser capaz de reaccionar de manera oportuna.
En los Estados Unidos, el entrenamiento de la tripulación incluye conocimiento de cómo ir directo, además de a formación básica en hombres del aire. No hay discrepancia.
Procedimientos de contingencia
Aunque un método particular no es obligatorio, cualquier altitud publicada y limitación de velocidad deben ser observadas.
No hay requisitos
Aunque un método particular no es obligatorio, cualquier altitud publicada y limitación de velocidad deben ser observadas.
El RNAV de los Estados Unidos no define ningún nuevo requisito de altitud o de velocidad (tampoco la TGL-10), por lo que esta declaración no está incluida. No hay discrepancia.
El piloto debe notificar al ATC cualquier pérdida de la capacidad
No hay requisitos
La tripulación de vuelo debe notificar al ATC de cualquier problema con el sistema
No se especifica en el AC 90-100, 8d: "El piloto debe de notificar al ATC cualquier pérdida de la capacidad RNAV, junto con el curso de acción propuesta".
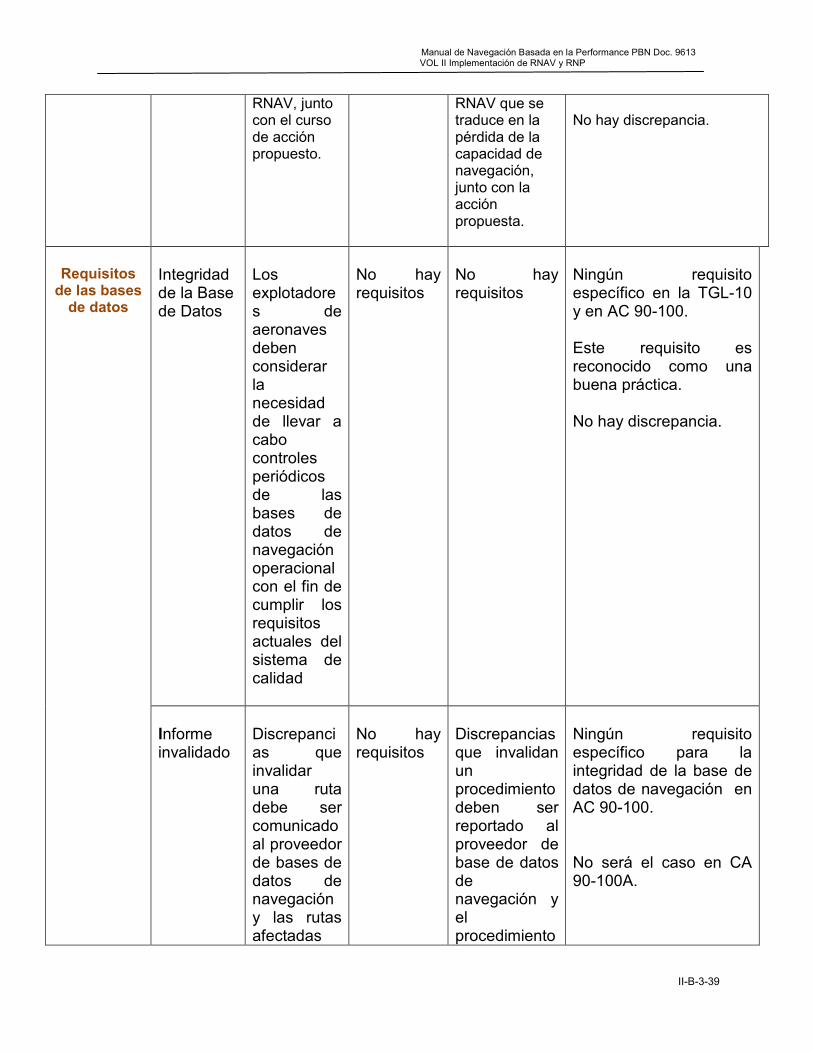
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-39
RNAV, junto con el curso de acción propuesto.
RNAV que se traduce en la pérdida de la capacidad de navegación, junto con la acción propuesta.
No hay discrepancia.
Integridad de la Base de Datos
Los explotadores de aeronaves deben considerar la necesidad de llevar a cabo controles periódicos de las bases de datos de navegación operacional con el fin de cumplir los requisitos actuales del sistema de calidad
No hay requisitos
No hay requisitos
Ningún requisito específico en la TGL-10 y en AC 90-100. Este requisito es reconocido como una buena práctica. No hay discrepancia.
Requisitos de las bases de datos
Informe invalidado
Discrepancias que invalidar una ruta debe ser comunicado al proveedor de bases de datos de navegación y las rutas afectadas
No hay requisitos
Discrepancias que invalidan un procedimiento deben ser reportado al proveedor de base de datos de navegación y el procedimiento
Ningún requisito específico para la integridad de la base de datos de navegación en AC 90-100. No será el caso en CA 90-100A.

Parte B Implementación de RNAV Capítulo 3 Aplicación de RNAV 1 y RNAV 2
ll-B-3-40
deben ser prohibida por el operador y notificadas a las tripulaciones de vuelo.
afectado deben ser prohibido por un el operador y notificarlo a la tripulaciones de vuelo.
Chequeos periódicos
Los explotadores de aeronaves deben considerar la necesidad de llevar a cabo controles periódicos de los bases de datos de navegación operacional con el fin de cumplir los requisitos actuales del sistema de calidad.
No hay requisitos
No hay requisitos
Ningún requisito específico en TGL-10 y AC en 90-100. Este requisito es reconocido como una buena práctica. No hay discrepancia.
Requisitos de Mantenimient
o
Revisión de la MEL
Cualquier revisión necesaria a la lista de equipo mínimo (MEL),
No hay requisitos específicos
No hay requisitos específicos
Cubierto en la TGL-10 (10.7.2) y en la AC 90-100 como orientación general (no específica un medio para regular la MEL): "El piloto debe también confirmar la
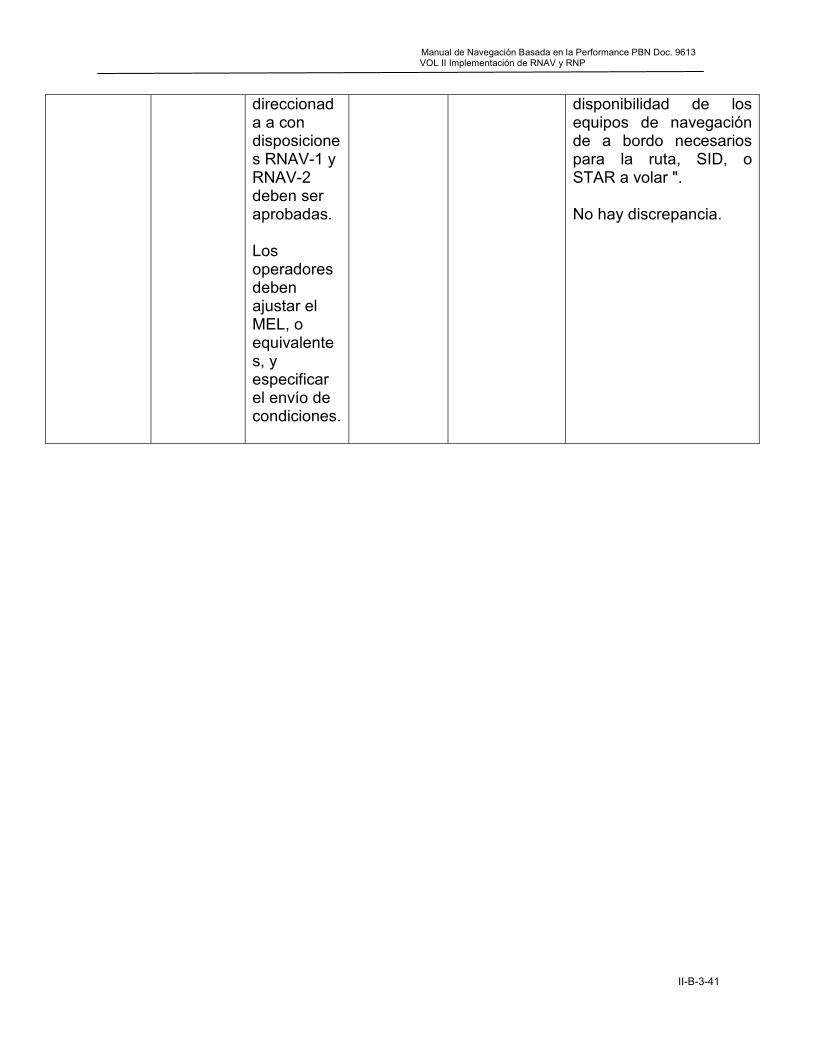
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-B-3-41
direccionada a con disposiciones RNAV-1 y RNAV-2 deben ser aprobadas. Los operadores deben ajustar el MEL, o equivalentes, y especificar el envío de condiciones.
disponibilidad de los equipos de navegación de a bordo necesarios para la ruta, SID, o STAR a volar ". No hay discrepancia.

II-C-1-1
CAPÍTULO 1
APLICACIÓN RNP-4
INTRODUCCIÓN
Antecedentes
En este capítulo se aborda la aplicación de la RNP-4 para apoyar la separación mínima basada en distancia de 30 NM laterales y 30 NM longitudinales en el espacio aéreo oceánico o remoto.
PROPÓSITO
En este capítulo se proporciona orientación a los Estados para la implementación de la RNP-4 para ayudar en el desarrollo operativo de aprobación o los procesos de autorización. El proceso de aprobación operacional se describe en este documento y se limita a las aeronaves que han recibido la certificación de aeronavegabilidad y que indica los sistemas de navegación instalados y se ajustan a los requisitos de la RNP-4. Esta certificación puede haber sido expedida en el momento de la fabricación, o donde los aviones han sido retro adaptados, a fin de cumplir los requisitos de la RNP-4, por la concesión de un certificado tipo suplementario (STC). Este capítulo no se ocupa de todos los requisitos que pueden ser especificados para las distintas operaciones. Estos requisitos se especifican en otros documentos, tales como normas de explotación, las publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales (Doc. 7030). Si bien la aprobación operacional se refiere principalmente a los requisitos de navegación del espacio aéreo, los operadores y la tripulación de vuelo todavía son necesarios para tener en cuenta todos los documentos operativos relativos al espacio aéreo, que son requeridos por la autoridad del Estado apropiado, antes de realizar los vuelos dentro del espacio aéreo. CONSIDERACIONES DEL PROVEEDOR DE SERVICIOS DE NAVEGACIÓN AÉREA
(ANSP)
Consideraciones de la infraestructura de ayudas a la navegación El RNP-4 fue desarrollado para las operaciones en espacio aéreo oceánico y remoto, por lo tanto, no requiere ninguna infraestructura de ayudas a la navegación de base
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-2
terrestre. El GNSS es el primer sensor de navegación de apoyo a la RNP-4, ya sea como sistema de navegación autónomo, o como parte de un sistema de sensores múltiples.
CONSIDERACIONES DE VIGILANCIA Y COMUNICACIONES Si bien este material de orientación se desarrolló para apoyar a las mínimas de separación longitudinal o lateral de 30 NM, sobre la base de RNP-4, cabe señalar que sólo se ocupa de los requisitos de navegación asociados con estas normas. No se refieren específicamente a las comunicaciones o los requisitos de vigilancia ATS.
Nota.- Las disposiciones relativas a los mínimos de separación, incluyendo los requisitos de comunicaciones y vigilancia ATS:
Siempre que se pueda apoyar el aumento de la tasa de presentación de informes necesarios, comunicaciones controlador-piloto por enlace de datos (CPDLC) y la vigilancia dependiente automática - contrato (ADS-C) que cumplan con los requisitos para la aplicación de las 50 NM laterales o longitudinales, sobre la base de los mínimos de la RNP-10 se cumplen también los requisitos mínimos para la aplicación de las 30 NM laterales y longitudinales. RNP-4 (falta referencia) Espaciado: 30 NM; Base 1: Evaluación de seguridad realizada por la Administración Federal de Aviación de los Estados Unidos, basándose en los análisis relativos a una proporción aceptable de errores laterales crasos en un sistema de rutas paralelas en que se utilice la separación de 30 NM entre derrotas, cumpliendo al mismo tiempo el nivel deseado de seguridad de 5 × 10-9 accidentes mortales por hora de vuelo. Base 2: Los requisitos mínimos de comunicaciones y vigilancia reseñados seguidamente son necesarios desde el punto de vista operacional para la gestión de sucesos contingentes y de emergencia en un sistema de rutas con separación de 55,5 km (30 NM).
Nota: Se dispone de más información sobre la evaluación realizada en materia de seguridad operacional en el Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de separación (Doc. 9689).
Requisitos mínimos ATS: NAV — Se estipulará RNP-4 para el área, derrotas o rutas ATS designadas COM — Comunicaciones orales directas controlador-piloto o comunicaciones por enlace de datos controlador-piloto (CPDLC)
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-3
SUR — Un sistema ADS en el que deberá enviarse un contrato relacionado con un suceso que incluya un informe sobre un suceso de desviación lateral cuando se produzca una desviación con respecto al eje de la derrota superior a 5 NM Otros — Antes de la implantación se efectuará una verificación del sistema que sea de duración e integridad suficientes para demostrar que la proporción máxima aceptable de desviaciones laterales superiores o iguales a 15 NM no excederá de lo indicado en la Tabla B-1 y que el sistema satisface los requisitos operacionales y técnicos. La verificación debería realizarse después de que se hayan cumplido los requisitos mínimos arriba reseñados en materia de navegación, comunicaciones y vigilancia. Después de la implantación debe establecerse un programa de supervisión para verificar periódicamente que la proporción real de desviaciones laterales superiores o iguales a 15 NM ocurridas en el sistema no excede el máximo prescrito en la Tabla B-1 [la información atinente a la supervisión figura en el Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de separación (Doc. 9689), Capítulo 8].
Nota 1. — El planificador del espacio aéreo debería decidir en primer lugar cuál de los cuatro sistemas descritos se aplica al espacio aéreo considerado. Si el sistema no es idéntico a uno de los cuatro casos descritos en la Tabla B-1, el planificador debería efectuar una interpolación conservadora, tomando de los dos casos que más se parezcan al sistema aquél que presente la proporción de desviaciones laterales más baja. Seguidamente se seleccionará de la primera columna el valor correspondiente al coeficiente de ocupación lateral del sistema, que se prevé no se excederá a lo largo del período objeto de planificación. Mediante la lectura de la tabla en la fila y columna seleccionadas, el planificador del espacio aéreo obtiene el valor correspondiente a la proporción de desviaciones laterales que no debe excederse para que el sistema satisfaga el TLS de 5 × 10-9 accidentes mortales por hora de vuelo. Nota 2. — Las desviaciones laterales que deberían tenerse en cuenta para fines de evaluación de la seguridad operacional del sistema son aquellas desviaciones con respecto a la derrota de magnitud superior o igual a 15 NM, que no están relacionadas con la ejecución de un procedimiento de contingencia aprobado.
Nota 3. — Los procedimientos atinentes al uso de CPDLC y ADS, aparecen en los PANS-ATM (Doc. 4444), Capítulos 13 y 14, respectivamente. Los criterios en materia de ADS y CPDLC deberían establecerse mediante una evaluación adecuada de la seguridad operacional. La información relativa a las evaluaciones de la seguridad operacional figura en el Manual sobre la metodología de planificación del espacio aéreo para determinar las mínimas de separación (Doc. 9689). Nota 4. — Esta separación se elaboró con miras a su aplicación en el espacio aéreo remoto y oceánico donde no se dispone de infraestructura VOR. Nota 5. — En este texto, el coeficiente de ocupación lateral equivale a un número igual al doble del número de pares de aeronaves próximas en sentido lateral, dividido
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-4
por el número total de aeronaves. Se encontrará una explicación detallada de los términos utilizados en la confección de modelos de riesgo de colisión en el Manual de planificación de servicios de tránsito aéreo (Doc. 9426), Parte II, Capítulo 4, Apéndices A y C.
Para entornos radar: RNP-4 (Anexo 11 Adjunto B Espaciado: 8 – 12 NM; Base: Comparación con un sistema de referencia; las áreas de retención, determinadas de conformidad con 2.2.1, no se superponen; Espacio aéreo protegido para rutas ATS RNAV basadas en RNP-4 El espacio aéreo protegido mínimo estipulado para las rutas ATS RNAV debería ser de 11,1 km (6 NM) a cada lado de la derrota prevista; y cabe esperar que las aeronaves equipadas con RNAV se mantengan dentro de este espacio durante el 99,5% del tiempo de vuelo. Antes de aplicar los valores dimanantes de este concepto debería tenerse en cuenta toda experiencia práctica adquirida en el espacio aéreo en cuestión, al igual que la posibilidad de que se logre mejorar la performance de navegación general de las aeronaves. Por ello, cuando las desviaciones laterales se controlan con ayuda de la vigilancia radar, la extensión del espacio aéreo protegido necesario puede reducirse según se indica a continuación:
Porcentaje de contención
95 96 97 98 99 99,5
km ±7,4 ±7,4 ±8,3 ±9,3 ±10,2 ±11,1
NM ±4,0 ±4,0 ±4,5 ±5,0 ±5,5 ±6,0
Espaciado entre rutas RNAV paralelas basadas en RNP-4 Cuando se utilice el espacio aéreo protegido descrito en Espacio aéreo protegido para rutas ATS RNAV basadas en RNP-4, convendría que los ejes de ruta se separen de modo que los espacios aéreos protegidos que comprendan los valores de retención de 99,5% no se superpongan. Cuando se implante un espacio aéreo que comprenda valores de retención inferiores al 99,5%, se requiere vigilancia radar. Requisitos mínimos ATS:
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-5
NAV — Todas las aeronaves requieren al menos una aprobación RNP de tipo 4 apropiada para las rutas/ derrotas por las que volarán, y debe proporcionarse la infraestructura de ayudas a la navegación suficiente para permitir operaciones RNP-4 COM — Comunicaciones orales directas VHF entre el controlador y el piloto SUR — Radar que cumpla con las normas existentes Otros — Debe evaluarse la seguridad del sistema, incluyendo el volumen de trabajo del controlador.
Incluir esta información Sección 5.4 del PANS-ATM (Doc. 4444).
FRANQUEAMIENTO DE OBSTÁCULOS Y EL ESPACIAMIENTO DE RUTA Orientaciones detalladas sobre obstáculos se proporciona en los PANS-OPS (OACI Doc. 8168, Volumen II), criterios generales en las partes I y III.
El mínimo de separación se describe en la sección 5.4 del PANS-ATM (Doc. 4444).
El RNP-4 podrá utilizarse para apoyar la aplicación de las normas de separación/ espaciamiento de ruta a menos de 30 NM en el espacio aéreo continental de un Estado y siempre que hayan llevado a cabo las evaluaciones necesarias de seguridad descritas en los PANS-ATM (Doc. 4444). Sin embargo, las comunicaciones y de vigilancia ATS parámetros que apoyen la aplicación de las nuevas normas de separación de las que serán diferentes de aquellas para los estándares de 30 NM.
CONSIDERACIONES ADICIONALES Muchos aviones tienen la capacidad para volar una trayectoria paralela, pero compensada a la izquierda o a la derecha, en la ruta activa. El propósito de esta función es permitir las compensaciones para las operaciones tácticas autorizadas por el ATC. Muchos aviones tienen la capacidad de ejecutar una maniobra de patrón de sostenimiento usando el sistema RNAV. El propósito de esta función es la de proporcionar flexibilidad al ATC en el diseño de las operaciones RNAV. Orientación en este capítulo no sustituye adecuada las necesidades de funcionamiento del Estado de equipo. La guía en este capítulo no reemplaza el Estado apropiado de los requisitos operacionales para el equipo
PUBLICACIÓN
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-6
El AIP debería indicar claramente la aplicación de navegación RNP-4. La ruta debe determinar los requisitos de la altitud mínima del segmento. Los datos de navegación publicada en el AIP de Estado para las rutas de navegación y el apoyo a las ayudas deberán cumplir los requisitos del Anexo 15 - Servicios de información aeronáutica. Todas las rutas deben basarse en las coordenadas WGS-84.
ENTRENAMIENTO DE CONTROLADORES Los controladores de tránsito aéreo en la prestación de servicios de control del espacio aéreo en el que se aplica la RNP-4 deben haber completado entrenamiento en las siguientes áreas: Capacitación Básica
a) ¿Cómo trabajan los sistemas de navegación de área (en el contexto de esta especificación de navegación):
I) incluyendo la capacidad funcional y las limitaciones de esta especificación de navegación;
II) la precisión, integridad, disponibilidad y continuidad incluyendo monitoreo de la performance y alerta a bordo
III) receptores GPS, RAIM, FDE, y las alertas de integridad;
IV) conceptos de los puntos de recorrido "Fly-by versus Fly Over (y diferentes rendimientos de virajes);
b) requisitos del plan de vuelo;
c) los procedimientos ATC:
I) procedimientos de contingencia ATC;
II) las mínimas de separación;
III) ambientes de equipo mixto (impacto de sintonización manual del VOR);
IV) la transición entre los distintos entornos operativos, y
V) la fraseología.
Entrenamiento específico para esta especificación de navegación Para la aplicación de las mínimas de separación 30/30:
a) comunicación CPDLC;
b) sistema ADS-C y entrenamiento de simulación, y
c) efecto del retraso de los informes periódicos/ fallos de la separación longitudinal.
ESTADO DEL MONITOREO
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-7
El proveedor de servicios de tránsito aéreo debe monitorear el estado de los GNSS y emitir advertencias oportunas de los cortes mediante NOTAMS.
SISTEMA DE VIGILANCIA ATS Demostrada la precisión de la navegación que proporciona una base para la determinación del espaciamiento lateral en ruta y las mínimas de separación necesarias para el tránsito que opera en una determinada ruta. Por consiguiente, los errores de navegación lateral y longitudinal son monitoreados a través de programas de vigilancia. Las observaciones por radar de cada aeronave de la proximidad a la trayectoria y la altitud, antes de su entrada a la cobertura de ayudas a la navegación de corto alcance y al final del segmento de ruta oceánica, es conocida por las instalaciones ATS. Si una observación indica que una aeronave no se encuentra dentro del límite establecido, un informe de error de navegación es reportado, y una investigación para determinar la razón de la aparente desviación de la trayectoria o de la altitud, con el fin de que las medidas puedan adoptarse para impedir que se repita.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes
Esta sección identifica los requisitos operacionales y de aeronavegabilidad para las operaciones RNP-4. El cumplimiento operativo de estos requisitos debe ser abordado a través de reglamentos operativos nacionales, y pueden requerir una aprobación operacional específica en algunos casos. Por ejemplo, ciertas normas de funcionamiento requieren que los operadores para aplicar su autoridad nacional (Estado de Registro) para la aprobación operacional. En este capítulo se aborda sólo la parte lateral del sistema de navegación.
Proceso de aprobación
Esta especificación de navegación no constituye en sí misma orientación de reglamentación en contra del cual las aeronaves o el operador serán evaluados y aprobados. Las aeronaves son certificadas por el Estado del fabricante. Los operadores son aprobados de conformidad con las normas de funcionamiento nacionales. La especificación de navegación proporciona las técnicas y criterios operacionales, y no implica una necesidad de re certificación. Los siguientes pasos deben ser completados antes de realizar operaciones RNP-4:
a) los equipos de elegibilidad de a bordo deberá ser determinado y documentado;
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-8
b) los procedimientos operativos para el sistema de navegación para ser utilizado y los procesos de la base de datos de navegación del operador deben estar debidamente documentados;
c) El entrenamiento de la tripulación de vuelo sobre la base de los procedimientos operativos deben estar documentados en caso necesario;
d) el material documentado anteriormente debe ser aceptado por la autoridad reguladora del Estado, y
e) la aprobación de funcionamiento deben ser obtenidos de conformidad con las normas de funcionamiento.
Elegibilidad de Aeronaves Documentos de elegibilidad de aeronavegabilidad. Documentación pertinente aceptable para el Estado de Operador/Registro deben estar disponibles para establecer que la aeronave está equipada con un sistema RNAV RNP-4 y reúna los requisitos. Para evitar la actividad normativa innecesaria, la determinación de elegibilidad para los sistemas existentes debería considerar la posibilidad de aceptación de fabricante en cumplimiento de la documentación, por ejemplo, la AESA AMC 20 series.
GRUPOS DE ELEGIBILIDAD DE AERONAVES
a) Grupo 1: certificación RNP:
El Grupo-1 son las aeronaves con certificación oficial y la aprobación de la RNP en la integración de la aeronave. El cumplimiento RNP está documentado en el manual de vuelo del avión. La certificación no necesariamente será limitada a una especificación RNP. El manual de vuelo debe abordar los niveles RNP que se han demostrado y las disposiciones conexas aplicables a su uso (por ejemplo, requisitos de sensor de las ayudas a la navegación).La aprobación operacional se basa sobre el rendimiento del manual de vuelo. Este método también se aplica en los casos en que se recibe la certificación a través de un STC para sufragar la retro adaptación de los equipos, tales como los receptores GNSS, a fin de que la aeronave cumpla con los requisitos de RNP-4 de espacio aéreo oceánico y remoto.
b) Grupo 2: Antes de la certificación de sistemas de navegación:
El Grupo-2 son aviones a los que pueden igualar su nivel de certificación o rendimiento, dado en virtud de normas anteriores de los criterios de la RNP-4.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-9
Esas normas figuran en i) a iii) y se puede utilizar para calificar los aviones del grupo 2:
I) los sistemas mundiales de navegación por satélite (GNSS).
Los aviones equipados con GNSS sólo como un sistema de navegación de largo alcance para operaciones en el espacio aéreo oceánico y remoto deben cumplir los requisitos técnicos especificados en “Requisitos de las Aeronaves”. El manual de vuelo, deberá indicar equipo doble GNSS homologados y aprobados bajo una norma adecuada esto es obligatorio. Las Normas adecuadas son la norma técnica TSO c129a o C146 de la FAA, y Estándares Técnicos Conjuntos JAA (JTSO) c129a o C146. Además, un envío aprobado de detección de fallos y la exclusión (FDE) se debe utilizar un programa de predicción de disponibilidad. El tiempo máximo permitido para la cual la capacidad FDE se prevé que no estará disponible en ningún caso es de 25 minutos. Este tiempo máximo de interrupción debe ser incluida como condición de la aprobación operacional RNP-4. Si las predicciones indican que el máximo corte permitido de FDE se superó, la operación debe ser reprogramado a un momento en que el FDE está disponible.
II) Sistemas Multi-sensor integrados con GNSS con integridad proporcionada por el Monitoreo de la integridad autónoma del receptor (RAIM).
Sistemas de sensores múltiples que incorpora el sistema de posicionamiento global (GPS) con RAIM y FDE que son aprobados bajo la norma FAA AC20-130a, u otros documentos equivalentes, reúnen los requisitos técnicos especificado en “Requisitos de las Aeronaves”. Tenga en cuenta que no existe ningún requisito para utilizar FDE y programas de predicción de disponibilidad cuando los sistemas múltiples sensores están instalados y utilizados
III) Monitoreo autónomo de la integridad de las aeronaves (AAIM).
El AAIM utiliza la redundancia de la posición estimada de varios sensores, incluyendo el GNSS, para proporcionar la integridad de rendimiento que sea al menos equivalente al RAIM. Estas aumentaciones a bordo deberán estar certificadas de acuerdo con la TSO C-115b, JTSO C-115b u otros documentos equivalentes. Un ejemplo es el uso de un sistema de navegación inercial o de otro tipo de sensores de navegación como una comprobación de la integridad de datos GNSS cuando el RAIM no está disponible, pero el GNSS sigue dando información de posicionamiento válida.
c) El Grupo 3: Nueva tecnología: Este grupo se ha provisto para cubrir los nuevos sistemas de navegación que cumplan con los requisitos técnicos para operaciones en espacio aéreo donde se especifica la RNP-4.
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-10
La aprobación operacional La evaluación de un operador en particular es hecha por el Estado de Operador/ Registro para ese operador y en conformidad con las normas de funcionamiento nacional (por ejemplo, los JAR-OPS 1, 14 CFR Parte 121) se apoya a través de asesoramiento y material de orientación. La evaluación debería tener en cuenta:
a) pruebas de la elegibilidad de aeronaves;
b) la evaluación de los procedimientos operativos para los sistemas de navegación que se utilice;
c) el control de los procedimientos aceptables a través de entradas en el manual de operaciones;
d) la identificación de los requisitos de entrenamiento de la tripulación de vuelo, y
e) en caso necesario, el control de los procesos de base de datos de navegación;
La aprobación operacional será documentada a través del Estado que aprobó el certificado de operador aéreo (AOC) a través de una carta de autorización LOA, las especificaciones operacionales adecuadas (Ops Spec) o una enmienda al manual de operaciones. Descripción del equipo de la aeronave El operador deberá disponer de una lista que detalla la configuración de los componentes y los equipos pertinentes que se utilizarán para las operaciones RNP-4 Documentación de Entrenamiento Los operadores comerciales deben tener un programa de entrenamiento donde aborden las prácticas operacionales, procedimientos y temas de entrenamiento relacionados con las operaciones RNP-4 (por ejemplo inicial, actualización o entrenamiento recurrente para la tripulación de vuelo, despachadores o personal de mantenimiento).
Nota.- No es necesario establecer un programa de entrenamiento separado o de régimen RNAV si el entrenamiento ya es un elemento integrado de un programa de formación. Sin embargo, debería ser posible identificar los aspectos del RNAV que son cubiertos dentro de un programa de formación.
Los operadores no comerciales deben estar familiarizados con las prácticas y procedimientos identificados en “conocimientos y entrenamiento del piloto”. Operaciones manuales y listas de comprobación
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-11
Las operaciones manuales y listas de comprobación para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos normalizados de trabajo detallado en “Procedimientos Operacionales”. Los manuales apropiados deben contener instrucciones operacionales de navegación y procedimientos de contingencia si se especifica. Los manuales y listas de chequeo deben ser sometidos a revisión como parte del proceso de solicitud. Los operadores no comerciales deben crear las instrucciones apropiadas que contienen las instrucciones operacionales de navegación y procedimientos de contingencia. Esta información debe estar disponible para las tripulaciones de vuelo y deben ser introducidos en el manual de operaciones, o el manual de operación del piloto, según corresponda. Estos manuales y las instrucciones del fabricante para operación de la aeronave y el equipo de navegación, según proceda, deberán presentarse para su revisión como parte del proceso de la solicitud. Los operadores no comerciales deben operar utilizando las prácticas y procedimientos identificados en “Procedimientos Operacionales”. Consideraciones Lista de equipo mínimo (MEL), Cualquier revisión necesaria al MEL para hacer frente a las disposiciones RNP-4 debe ser aprobada. Los operadores deben ajustar el MEL, o equivalente, y especificar las condiciones de envío. Todos los operadores deben presentar su programa de mantenimiento, incluyendo un programa de control de la fiabilidad para el monitoreo del equipo, para su aprobación en el momento de la solicitud. El titular de la aprobación de diseño, incluidas las del certificado tipo (TC) o certificado tipo suplementario (STC) para cada sistema de navegación individual la instalación deberá presentar al menos un conjunto de instrucciones completas para el mantenimiento de la aeronavegabilidad
REQUISITOS DE AERONAVES Para operaciones RNP-4 en espacio aéreo oceánico o remoto, por lo menos dos sistemas de navegación (LRNSs), de largo alcance totalmente servibles e independiente con la integridad de tal manera que el sistema de navegación no ofrezca información engañosa, debe estar instalado en la aeronave y que forman parte de la base sobre la que la RNP-4 se concede la aprobación operacional. El GNSS debe ser utilizado y puede ser utilizado, ya sea como sistema de navegación autónomo, o como uno de los sensores en un sistema de sensores múltiples. La circular AC 20-138A FAA de los Estados Unidos o documentos equivalentes, proporciona un medio aceptable de cumplir con requisitos de instalación para los aviones que utilizan, pero no integrado, la salida GNSS con la de otros sensores. La AC 20-130A FAA describe un medio aceptable de cumplimiento de sensores múltiples para sistemas de navegación que incorporan los GNSS.
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-12
La configuración de equipos utilizados para demostrar la precisión requerida debe ser idéntica a la configuración especificada en el manual de vuelo o MEL. El diseño de la instalación deberá cumplir con el diseño estándar que son aplicables a las aeronaves que han sido modificadas y los cambios deben ser reflejados en el manual de vuelo antes de iniciar operaciones que requieran una aprobación de navegación RNP-4.
Sistema de rendimiento, monitoreo y la alerta Precisión: Durante las operaciones en el espacio aéreo o en rutas designadas como RNP-4, el error total lateral del sistema debe estar dentro ± 4 NM al menos el 95 por ciento del total de tiempo de vuelo. El error a lo largo de la trayectoria debe estar también dentro de ± 4 NM al menos el 95 por ciento del total de tiempo de vuelo. Un FTE de 2,0 NM (95 por ciento) puede ser asumido. Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como un gran fallo en virtud de las condiciones reglamentarias de aeronavegabilidad es decir, 10-5 por hora). Continuidad: La pérdida de la función que está clasificada como una falla mayor condición para la navegación oceánica y remotas. El requisito de continuidad se cumple si se lleva un sistema doble independiente de navegación de largo alcance (con exclusión de la señal en el espacio). La Monitoreo de la performance y alerta: El sistema RNP, o sistemas RNP y en combinación con el piloto, deberán proporcionar una alerta si el requisito de precisión no se cumple, o si la probabilidad de que el lateral TSE sea superior a 8 NM es mayor que 10-5. Señal en el espacio: Si se está utilizando el GNSS, el equipo de navegación de la aeronave deberá proveer una alerta si la probabilidad de que los errores de la señal en el espacio causan un error de posición lateral superior a 8 NM y supera 10-7 por hora (Anexo 10, Volumen I, Tabla 3.7.2.4-1). Volumen II Parte C Capítulo I Pagina 2 de este manual
Nota: El cumplimiento del requisito de monitoreo de la performance y alerta no implica un monitoreo automático del error técnico de vuelo. La función del monitoreo de la performance y alerta a bordo debería consistir, al menos, de un algoritmo de monitoreo de la performance y alerta del error de sistema de navegación (NSE) y una pantalla de desviación lateral que permite a la tripulación controlar el error técnico de vuelo (FTE). En la medida que los procedimientos operativos se utilizan para monitorear el FTE, el procedimiento de la tripulación, características del equipo, y la instalación son evaluados por su eficacia y equivalencia, tal como se describe en los requisitos funcionales y procedimientos de operación. El error de definición de la trayectoria (PDE) se considera
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-13
insignificante, debido al proceso de garantía de la calidad “Base de Datos de Navegación” y procedimientos de la tripulación “Procedimientos Operacionales”.
Los requisitos funcionales El sistema de navegación de a bordo debe tener las siguientes funcionalidades:
a) la visualización de los datos de navegación;
b) Trayectoria a un punto de referencia (TF);
c) directo a punto de referencia (DF);
d) función directo a;
e) curso a punto de referencia (CF);
f) Vuelo paralelo compensado;
g) criterios de transición "fly-by;
h) Pantalla de interfaz de usuario;
i) planificación de los vuelos y selección de trayectoria;
j) planificación de los vuelos y secuenciación de puntos de referencia;
k) curso a punto de referencia definido por el usuario;
l) Gobierno de trayectoria;
m) los requisitos de alerta;
n) acceso a bases de datos de navegación;
o) sistema de referencia geodésico WGS-84; y
p) actualización automática de la posición por radio.
Explicación de las funcionalidades requeridas
Visualización de datos de navegación La visualización de los datos de navegación deberán utilizar cualquiera de las dos, pantallas de desviación lateral (ver el punto a) más adelante) o una pantalla de mapas de navegación (ver punto b) más abajo) que cumpla los siguientes requisitos:
a) una pantalla de desviación lateral no numérica (por ejemplo, CDI, indicador electrónico de situación horizontal (E) HSI), con una indicación de FROM/TO y el anuncio de fallo, para su uso como instrumento principal de vuelo para la navegación de la aeronave, para la maniobra de anticipación, y para el fallo/estado/indicación de integridad, con los siguientes atributos:
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-14
1) la pantalla debe estar visible y ubicado en la vista principal del piloto (± 15 grados de la línea normal de visión del piloto) cuando se mira hacia adelante a lo largo de la trayectoria de vuelo;
2) la escala de desviación lateral debe estar de acuerdo con cualquier anuncio y límites de alerta y, si se aplican;
3) la pantalla de desviación lateral debe estar esclavizada automáticamente a la trayectoria RNAV calculada. La pantalla de desviación lateral también debe tener la totalidad de la escala adecuada para la fase actual de vuelo y debe basarse en la precisión de mantenimiento de la trayectoria. El selector de curso de la pantalla de desviación lateral debe estar esclavizado automáticamente a la trayectoria RNAV calculada, o el piloto debe ajustar el curso CDI o HSI seleccionado para el cálculo de la trayectoria deseada.
Nota.- La función normal de equipo GNSS autónomo cumple este requisito.
4) la escala de la pantalla puede establecerse automáticamente por defecto lógico o fijado a un valor obtenido de base de datos de navegación. El valor total de deflexión de la escala debe ser conocido o tiene que estar disponible para el piloto y debe estar en consonancia con el valor de la ruta, fase terminal o aproximación.
b) una pantalla de mapas de navegación, fácilmente visibles para el piloto, con las correspondientes escalas de mapas (la escala puede ajustarse manualmente por el piloto), y dando una funcionalidad equivalente a la pantalla de desviación lateral.
Paralelo compensado El sistema debe tener la capacidad para volar en paralelo a la trayectoria nominal a una distancia seleccionada. Cuando se realice un vuelo paralelo compensado, la precisión de la navegación y todos los requisitos de performance de la ruta original en el plan de vuelo activo debe ser aplicable a la compensación de ruta. El sistema debe proporcionar la entrada de distancias compensadas en incrementos de 1 NM, a la izquierda o derecha del curso. El sistema deberá ser capaz de compensaciones de un mínimo de 20 NM. Durante su uso, el modo de operación paralelo del sistema compensado debe ser indicado claramente a la tripulación de vuelo. Cuando en el modo paralelo, el sistema debe proporcionar los parámetros de referencia (por ejemplo, desviación perpendicular a la derrota, la distancia a volar, el tiempo a ir) en relación con la trayectoria paralela compensada y paralelo a los puntos de referencia. Una compensación no debe ser propagada a través de discontinuidades de ruta, geometrías no razonables de las trayectorias, o más allá del punto de referencia de aproximación inicial.

Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-15
La anunciación se debe dar a la tripulación de vuelo antes de la final de la ruta paralela compensada, con tiempo suficiente para volver a la ruta original. Una vez un paralelo compensado es activado, la compensación debe seguir siendo activa para todos los segmentos de ruta del plan de vuelo hasta eliminarse automáticamente, hasta que la tripulación de vuelo entra una ruta directa a, o hasta que la tripulación de vuelo cancele manualmente. La función compensar paralelo debe estar disponible para la ruta TF y la parte geodésica del tipo de tramo DF. Criterios de transición Fly-by El sistema de navegación debe ser capaz de cumplir con las transiciones fly-by. Trayectorias no previsibles y repetibles son especificadas debido a que la trayectoria óptima varía con la velocidad y el ángulo de banqueo. Sin embargo, los límites de la zona de transición son definidos. El error de definición de trayectoria es definido como la diferencia entre la trayectoria definida y la zona de transición teórica. Si la trayectoria se encuentra dentro de la zona de transición, no hay error de definición la trayectoria. Las transiciones Fly-by debe ser transición por defecto cuando el tipo de transición no se especifica. Los requisitos de la zona de transición teórica son aplicables para los siguientes supuestos:
a) el cambio de curso no excedan de 120 grados para altitudes de transiciones bajas (la altitud barométrica de la aeronave es inferior a FL 195), y
b) el cambio de curso no excedan de 70 grados para altitudes de transiciones altas (la altitud barométrica de la aeronave es igual o superior a FL 195).
Pantallas de Interfaz de usuario Las características de la interfaz del usuario en general deben mostrar claramente la información, proporcionar el conocimiento de la situación, y estar concebida e implementada para dar cabida a consideraciones de los factores humanos. Las consideraciones de diseño esenciales incluyen:
a) reducir al mínimo la dependencia de la memoria de la tripulación de vuelo para cualquier sistema operativo procedimiento o tarea;
b) el desarrollo de una clara e inequívoca pantalla del sistema de modos/sub-modos y los datos de la navegación, con énfasis en el conocimiento de la situación de cualquier cambio de modo automático, si se proporciona;
c) el uso de la ayuda en el contexto sensible y la capacidad de mensajes de error (por ejemplo, entrada no válida o entrada de mensajes de datos no válida debe
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-16
proporcionar un procedimiento sencillo para determinar como entrar datos "válidos");
d) métodos de entrada tolerante a errores de datos en lugar de conceptos rígidos basado en normas;
e) haciendo especial hincapié en el número de pasos y reducir al mínimo el tiempo necesario para cumplir con las modificaciones del plan de vuelo para dar cabida a las autorizaciones ATS, procedimientos de espera, cambios de pista y de aproximación por instrumentos, aproximaciones frustradas y desviaciones para alternar destinos, y
f) reducir al mínimo el número de alertas molestas por lo que la tripulación de vuelo reconocerá y reaccionara de forma apropiada, cuando sea requerido.
Visualizadores y controles Cada elemento de visualización utilizado como instrumento principal de vuelo en el guiado y control de la aeronave, para maniobra de anticipación, o para fallos/estado/ anuncios de integridad, debe estar ubicado donde es claramente visible para el piloto (en el campo principal de visión del piloto) con la menor desviación posible de la posición normal del piloto y de la línea de visión cuando se mira hacia adelante siguiendo la trayectoria de vuelo. Para los aviones que cumplan los requisitos del FAR/CS/JAR 25, el cumplimiento con las disposiciones de los documentos de certificación, tales como AC 25-11, AMJ 25-11 y otros documentos, debe cumplirse. Todas las pantallas del sistema, controles y anuncios deben ser legibles bajo condiciones normales de la cabina y las condiciones de ambiente de luz esperadas. Las disposiciones de iluminación nocturna deberán ser compatibles con otras iluminaciones de la cabina. Todas las pantallas y controles se deben realizar para facilitar la accesibilidad y el uso a la tripulación de vuelo. Los controles que son normalmente ajustados en vuelo deberán ser de fácil acceso normalizado con el etiquetado en cuanto a su función. Los controles del sistema y pantallas deben ser diseñados para maximizar la idoneidad operacional y minimizar la carga de trabajo del piloto. Los controles destinados para uso durante el vuelo deben ser diseñados para reducir al mínimo los errores, y cuando funcionan en todas las posibles combinaciones y secuencias, no debe dar lugar a una condición de que sería perjudicial para el performance continuado del sistema. Los controles del sistema deben ser dispuestos para proporcionar una protección adecuada contra el cierre involuntario del sistema. La Planificación de los Vuelos y Selección de la Trayectoria El sistema de navegación deberá facilitar a la tripulación la capacidad de crear, revisar y activar un plan de vuelo. El sistema debe proporcionar la capacidad de modificación (por ejemplo, supresión y adición de puntos de referencia y creación de puntos de referencia a lo largo de la trayectoria), la revisión y la aceptación de los cambios de los usuarios para los planes de vuelo. Cuando esta capacidad es ejercida, la orientación de la salida no deberá quedar afectada hasta que la modificación (es) sea activada. La
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-17
activación de cualquier modificación del plan de vuelo debe exigir una acción positiva por la tripulación después de la entrada y la verificación por la tripulación de vuelo. Planificación de vuelo y secuenciación de los puntos de referencia El sistema de navegación debe proporcionar la capacidad de secuenciación automática de puntos de referencia. Curso a punto de referencia definido por el usuario El sistema de navegación debe proporcionar la capacidad para definir un curso a punto de referencia definido por el usuario. El piloto debe ser capaz de interceptar el curso definido por el usuario. Gobierno de la Trayectoria El sistema deberá proporcionar datos que permitan la generación de señales para el piloto automático/director de vuelo/CDI, según sea el caso. En todos los casos, un error en el gobierno de la trayectoria (PSE) debe ser definido en el momento de la certificación, la cual reunirá los requisitos de la operación RNP deseada en combinación con los otros errores del sistema. Durante el proceso de certificación, la capacidad de la tripulación para operar la aeronave dentro de la PSE debe ser demostrada. Tipo de aeronave, sobre el funcionamiento, pantallas, performance del piloto automático, y orientación en la transición de tramos o segmentos (especialmente entre los segmentos de arco) debe tenerse en cuenta en la demostración del cumplimiento PSE. Un valor medido de PSE puede ser utilizado para monitorear el cumplimiento de los requisitos del sistema RNP. Para la operación en todos los tipos de segmentos o tramos, este valor debe ser la distancia a la trayectoria definida. Para el cumplimiento de la contención perpendicular a la derrota, cualquier inexactitud en el cálculo de error perpendicular a la derrota (por ejemplo, la resolución) debe ser contabilizada en el de error total del sistema. Los requisitos de Alerta El sistema también debe proporcionar un anuncio si la precisión de la navegación introducida manualmente es más grande que la precisión de la navegación asociada con el actual espacio aéreo, tal como se definen en la base de datos de navegación. Cualquier reducción posterior de la precisión de la navegación debe restablecer este anuncio. Cuando se aproxima a espacio aéreo RNP desde espacio aéreo no RNP, la alerta debe estar activada cuando la trayectoria perpendicular de la trayectoria deseada es igual o inferior a la mitad de la precisión de la navegación y el avión ha pasado el primer punto de referencia en el espacio aéreo RNP.
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-18
Acceso a bases de datos de navegación La base de datos de navegación deberá dar acceso a la información de navegación en apoyo de los sistemas de navegación de referencia y las características de la planificación de los vuelos. La modificación manual de los datos en la base de datos de navegación no debe ser posible. Este requisito no impedirá el almacenamiento de "datos definidos por el usuario" en el equipo (por ejemplo, para el seguimiento de rutas-flexibles). Cuándo los datos son llamados desde el almacenamiento deben también mantenerse en el almacenamiento. El sistema debe proporcionar un medio para identificar la versión de la base de datos de navegación y período de operación válida. Sistema de referencia geodésico El Sistema Geodésico Mundial - 1984 (WGS-84) o un modelo de referencia equivalente de la Tierra debe ser el modelo de referencia de la Tierra para la determinación del error. Si el WGS-84 no es empleado, las diferencias entre el modelo de la Tierra seleccionado y el modelo WGS-84 de la Tierra deben ser incluidos como parte de definición del error de la trayectoria (PDE). Los errores inducidos por la resolución de los datos deben también ser considerados.
PROCEDIMIENTOS OPERATIVOS
La certificación de aeronavegabilidad por sí sola no autoriza operaciones RNP-4. La aprobación Operacional es también requerida para confirmar la adecuación de los operadores normales y los procedimientos de contingencia para la instalación del equipo en particular. Planificación pre vuelo (AIS) Los operadores deben utilizar el plan de vuelo OACI apropiado designando la ruta RNP especificada. La letra "R" debe ser ubicada en la casilla número 10 del plan de vuelo de la OACI para indicar que el piloto ha revisado la ruta prevista de vuelo y determina los requisitos RNP de la aeronave y la aprobación del operador para rutas RNP. La información adicional debe ser desplegada en la sección de observaciones, indicando la capacidad de precisión, como por ejemplo RNP-4 versus RNP 10. Es importante comprender que los requisitos adicionales deberán ser cumplidos para la autorización operacional en el espacio aéreo RNP-4 o en rutas RNP-4. Las comunicaciones Controlador-piloto por enlace de datos (CPDLC) y la vigilancia dependiente automática - contrato (ADS-C) también serán requeridas cuando la separación lateral y/o longitudinal es de 30 NM.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-19
Los datos de navegación de a bordo deben ser actuales e incluyen los procedimientos apropiados. Nota.- se espera que las bases de datos de navegación estén actualizadas por el período de duración del vuelo. Si el ciclo AIRAC cambia durante el vuelo, los operadores y los pilotos deberán establecer procedimientos para garantizar la exactitud de los datos de navegación, incluyendo la idoneidad de las instalaciones de navegación utilizadas para definir las rutas y los procedimientos de vuelo. La tripulación de vuelo, deberá:
a) examinar los registros de mantenimiento y las formas para determinar el estado de los equipos necesarios para el vuelo en espacio aéreo RNP-4 o en las rutas que requieren la capacidad de navegación RNP-4;
b) garantizar que en el mantenimiento se han tomado medidas para corregir los defectos en el equipo necesario, y
c) revisar los procedimientos de contingencia para las operaciones en el espacio aéreo RNP-4 o en las rutas que requieren una capacidad de navegación RNP-4.Estos no son diferentes de los procedimientos de contingencia normales oceánicos con una excepción: las tripulaciones deben ser capaces de reconocer, y el ATC debe ser advertidos, cuando el avión ya no es capaz de mantener la capacidad de navegación RNP-4.
Disponibilidad del GNSS En la ejecución o durante la planificación de los vuelos, el operador deberá garantizar que se dispone de la capacidad de navegación en ruta para permitir que el avión navegue la RNP-4 y que incluya la disponibilidad de FDE, en su caso, para la operación. En ruta Al menos dos LRNSs (Sistemas de Navegación de Largo Alcance), capaces de navegar RNP-4, y que figuran en el manual de vuelo, deberán estar operativos en el punto de entrada del espacio aéreo RNP. Si un elemento del equipo requerido para las operaciones RNP-4 está fuera de servicio, entonces el piloto debería considerar la posibilidad de una ruta alternativa para la reparación o la desviación. En los procedimientos operativos de vuelo se debe incluir los procedimientos de chequeo cruzado obligatorios para identificar los errores de navegación con suficiente tiempo para evitar cualquier desviación de las rutas autorizadas por el ATC La tripulación deberá informar al ATC de cualquier deterioro o fallo de los equipos de navegación que hacen el rendimiento de la navegación o caen por debajo del nivel requerido, y/o cualquier desviación requerida para un procedimiento de contingencia.
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-20
Los pilotos deben utilizar un indicador de desviación lateral, director de vuelo, piloto automático en modo de navegación lateral en rutas RNP-4. Los pilotos podrán utilizar un mapa de navegación con una funcionalidad equivalente a un indicador de desviación lateral, tal como se describe en Visualización de datos de navegación b). Los pilotos de aeronaves con un indicador de la desviación lateral debe asegurarse que la escala del indicador de desviación lateral (cambie a full escala) es adecuado para la precisión de la navegación asociadas con la ruta (es decir, ± 4 NM).Se espera que todos los pilotos mantengan el centro de la ruta, como se describe a bordo por los indicadores de desviación lateral y/o de guiado de vuelo durante todas las operaciones RNP que se describen en este manual a menos que sea autorizado por ATC para desviarse o en condiciones de emergencia. Para operaciones normales el error perpendicular a la trayectoria/desviación (la diferencia entre la trayectoria calculada por el sistema RNAV y la posición relativa de la aeronave), debe limitarse a ± ½ la precisión de la navegación asociadas con la ruta (es decir, 2 NM). Breve desviaciones de esta norma (por ejemplo, overshoots o undershoots) durante e inmediatamente después de los virajes en ruta, hasta un máximo de una vez la precisión de la navegación (es decir, 4 NM), son admisibles.
CONOCIMIENTO DEL PILOTO Y ENTRENAMIENTO Los operadores/propietarios deben asegurarse de que las tripulaciones de vuelo están entrenadas y tienen un conocimiento adecuado de los temas contenidos en este material de orientación, los límites de sus capacidades de navegación RNP-4, los efectos de la actualización, y procedimientos de contingencia RNP-4. Para determinar si la formación es adecuada, una autoridad que dio su aprobación podría:
a) evaluar un curso de capacitación antes de aceptar un centro de formación certificado o un centro específico;
b) la aceptación de una declaración del operador/propietario en la aplicación para una aprobación RNP-4 que el operador/propietario ha garantizado y seguirá garantizando que las tripulaciones de vuelo están familiarizadas con las prácticas de operación RNP-4 y procedimientos que figuran en este capítulo, o
c) la aceptación de una declaración del operador que ha realizado o realizará un programa de formación RNP-4 utilizando las orientaciones contenidas en este capítulo.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-21
BASE DE DATOS DE NAVEGACIÓN
La base de datos de navegación se debe obtener de un proveedor que cumpla con RTCA DO 200A/EUROCAE documento ED 76, Normas para procesamiento de datos aeronáuticos. Una carta de aceptación (LOA) expedida por la autoridad reguladora demostrando el cumplimiento de este requisito (por ejemplo, la FAA LOA de conformidad con la FAA AC 20-153 o AESA LOA expedidos de conformidad con la EASA IR 21 sub parte G). Las discrepancias que invalidan la ruta deben ser reportadas al proveedor de bases de datos de navegación y la ruta afectada debe ser prohibida por un operador y notificada a su tripulación de vuelo. Los explotadores de aeronaves deben considerar la necesidad de realizar controles periódicos de las bases de datos de navegación operacionales a fin de satisfacer los requisitos del sistema de calidad. Nota.- Para minimizar el error de definición de trayectoria, la base de datos debe cumplir con DO-200A/ED-76, o unos medios operativos equivalentes y deben estar en vigor para garantizar la integridad de la base de datos de RNP-4.
SUPERVISIÓN DE LOS OPERADORES Una autoridad de aviación debería considerar la posibilidad de cualquier informe de error de navegación para determinar medidas correctivas. Repetidas ocurrencias de error de navegación son atribuidas a una específica pieza del equipo de navegación o procedimiento operativo que puede dar lugar en la cancelación de la aprobación operacional en espera de la aprobación de sustitución o modificaciones en los equipos de navegación o cambios en los procedimientos operativos del operador. La información que indica el potencial de repetir los errores puede requerir una modificación del programa de entrenamiento del operador, programa de mantenimiento o certificación de equipos específicos. La información que se atribuye a múltiples errores de una particular tripulación puede requerir un entrenamiento de reparación o revisión de la licencia de la tripulación.
Parte C Implementación de RNAV Capítulo 1 Aplicación de RNP 4
ll-C-1-22
REFERENCIAS
Sitios Web Federal Aviation Administration (FAA), United States http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/enroute/oceanic Civil Aviation Safety Authority (CASA), Australia http://www.casa.gov.au/rules/1998casr/index.htm
Publicaciones relacionadas FAA
� Administración Federal de Aviación (FAA), Estados Unidos Code of Federal
Regulations (CFR), Parte 121, Apéndice G. Circular de Asesoría (AC) 20-130A.
� Aprobación de Aeronavegabilidad de la navegación o sistemas de gestión de vuelo con la integración de múltiples sensores de navegación AC 20-138A.
� Aprobación de Aeronavegabilidad de Sistema Mundial de Navegación por
Satélite Equipo (GNSS) Orden FAA 7110.82.
� Vigilancia de la Navegación/ performance de la altitud en espacio aéreo oceánico Orden FAA 8400.33.
� Procedimientos para la obtención de autorización para la performance de
navegación requerida 4 (RNP-4) Operaciones en aéreas oceánicas y remotas CASA
� Autoridad Europea de Seguridad de Aviación Civil (CASA), Australia Circular Asesora (AC) 91U-3 (0): la performance de navegación requerida 4 (RNP-4) Autorización de Operaciones
OACI
� Organización de Aviación Civil Internacional (OACI) Anexo 6 - Operación de aeronaves
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-1-23
� Anexo 11 - Servicios de Tránsito Aéreo � Procedimientos para los servicios de navegación aérea - Gestión del Tránsito
Aéreo (PANS-ATM) (Doc. 4444).
� Plan mundial de navegación aérea para los sistemas CNS/ATM (Doc. 9750)
� (Pueden obtenerse copias de la Organización de Aviación Civil Internacional, Unidad de Servicios al Cliente, 999 University Street, Montreal, Quebec, Canadá H3C 5H7)
RTCA
� (Radio Technical Commission for Aeronautics) Comisión Radio Técnica para la Aeronáutica Normas de desempeño Mínimo del sistema de Aviación (MASPS): la performance de navegación requerida para Navegación de Área (DO 236B),
� RTCA las normas de desempeño Mínimo operacional (MOPS) para la
performance de navegación requerida para Navegación de Área (DO 283),
� RTCA Normas para procesamiento de datos aeronáuticos (DO 200A), RTCA
� (Pueden obtenerse copias de RTCA, Inc., 1828 L Street NW, Suite 805, Washington, DC 20036, Estados Unidos Estados)
EUROCAE Especificaciones de Rendimiento mínimo del sistema de Aviación, performance de navegación requerida para la Navegación de área (ED-75B) Normas para procesamiento de datos aeronáuticos (ED-76) (Pueden obtenerse copias de EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia (Fax: +33 1 46 55 62 65). Sitio web: www.eu
II-C-1-24
CAPÍTULO 2
APLICACIÓN RNP 2
A desarrollar.
II-C-3-1
CAPÍTULO 3
APLICACIÓN BASICA RNP-1
INTRODUCCIÓN
ANTECEDENTES La especificación de navegación RNP-1 básica proporciona un medio para desarrollar rutas de conectividad entre la estructura en ruta y el espacio aéreo terminal (TMA), con nula o limitada vigilancia ATS, con baja y media densidad de tránsito.
PROPÓSITO
En este capítulo se proporciona orientación a los Estados para la implementación de RNP-1 Básica para los procedimientos de llegada y salida. Este capítulo no se ocupa de todos los requisitos que pueden ser especificados para las distintas operaciones. Estos requisitos se especifican en otros documentos, tales como normas de operación, las publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales (Doc. 7030). Si bien la aprobación operacional se refiere principalmente a los requisitos de navegación del espacio aéreo, los operadores y la tripulación de vuelo todavía requerirán tener en cuenta todos los documentos operativos relativos al espacio aéreo, los cuales son requeridos por la autoridad del Estado, antes de realizar vuelos en ese espacio aéreo. CONSIDERACIONES DEL PROVEEDOR DE SERVICIO DE NAVEGACIÓN AÉREA
(ANSP)
Consideraciones de la infraestructura de ayudas a la navegación El GNSS será el principal sistema de navegación de apoyo a la RNP-1 básica. Mientras que los sistemas RNAV basados en DME/DME, son capaces de mantener la exactitud RNP-1 básica, esta especificación de navegación es ante todo para entornos donde la
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-2
infraestructura DME no puede apoyar la navegación de área DME/DME para el performance requerido. El aumento de la complejidad en los requisitos y evaluación de la infraestructura DME los medios no son práctico o costo-beneficio para una amplia aplicación. Los ANSP debe asegurar que los operadores de aeronaves equipadas con GNSS tiene los medios necesarios para predecir la detección de fallas utilizando ABAS (por ejemplo, RAIM). Cuando proceda, los ANSP deberían también asegurar que los operadores de aviones equipados con SBAS tengan los medios para predecir la detección de fallos. Este servicio de predicción puede ser proporcionado por los ANSP, fabricantes de equipos de a bordo u otras entidades. Los servicios de predicción pueden ser para los receptores que reúnan sólo el rendimiento mínimo de la norma técnica (TSO) o que sean específicos para el diseño de los receptores. Los servicios de predicción deben utilizar la información del estado sobre los satélites GNSS, y deben usar un límite de alerta horizontal apropiados para la operación (1 NM desde 30 NM del aeropuerto y 2 NM por otra parte). Los cortes deben ser identificados en caso de que se pronostique una continua pérdida de detección de fallos ABAS de más de cinco minutos para cualquier parte de la operación RNP-1 básica. Las RNP-1 básica no serán utilizadas en áreas donde existan interferencias de de la señal de navegación (GNSS) conocida. Los proveedores de servicios de navegación aérea (ANSP) deben realizar una evaluación de la infraestructura de ayudas a la navegación. Debe ser demostrado y suficiente para las operaciones propuestas, incluida los modos reversión.
CONSIDERACIONES DE COMUNICACIÓN Y VIGILANCIA ATS Esta especificación de navegación se destina para entornos donde la vigilancia ATS, es limitada o no está disponible. SID/STAR RNP-1 básica están principalmente destinados a ser llevadas a cabo en ambientes de comunicación directa controlador-piloto.
FRANQUEAMIENTO DE OBSTÁCULOS Y LA SEPARACIÓN HORIZONTAL Orientaciones detalladas sobre franqueamiento de obstáculos se proporciona en los PANS-OPS (OACI Doc. 8168, Volumen II), y se aplica los criterios generales de las partes I y III.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-3
El espaciamiento de ruta para RNP-1 básica depende de la configuración de la ruta, densidad de transito y la capacidad de intervención. La separación normal horizontal son publicadas en los PANS-ATM (Doc. 4444).
CONSIDERACIONES ADICIONALES
Para el diseño del procedimiento y evaluación de la infraestructura, el límite normal de FTE de 0,5 NM se define en los procedimientos operacionales es asumido a ser el 95 % del valor. La funcionalidad de alerta por defecto de un sensor TSO-C129a (autónoma o integrado), se alterna entre alerta terminal (± 1 NM) y alerta en ruta (± 2 NM) a 30 millas desde el punto de referencia (ARP) del aeropuerto.
PUBLICACIÓN
El procedimiento debería basarse en los perfiles normales de descenso e identificar los requisitos mínimos de altitud del segmento. Los datos de navegación publicados en el AIP del Estado para los procedimientos y el soporte de ayudas a la navegación deberán cumplir los requisitos del Anexo 15 - Servicios de información aeronáutica. Todos los procedimientos deben basarse en las coordenadas WGS-84.
ENTRENAMIENTO DE LOS CONTROLADORES Los controladores de tránsito aéreo quienes proporcionan los servicios de control en el área terminal y aproximación, donde se ejecuten la RNP-1 básicos, debe haber concluido el entrenamiento que cubre los temas que figuran a continuación. Capacitación Básica
a) ¿Cómo trabajan los sistemas de navegación de área RNAV (en el contexto de esta especificación de navegación):
I) incluyendo la capacidad funcional y las limitaciones de esta especificación de navegación; II) la precisión, integridad, disponibilidad y continuidad entre ellos la vigilancia del performance y alerta a bordo; III) el receptor GPS, RAIM, FDE, la integridad y las alertas; IV) concepto de Puntos de recorrido "Fly-By y Fly Over (y rendimiento en diferentes virajes);
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-4
b) requisitos del plan de vuelo; c) los procedimientos ATC;
I) procedimientos de contingencia ATC; II) las mínimas de separación; III) medio ambiente de equipo mixto (impacto de la sintonización manual del VOR); IV) la transición entre los distintos entornos operativos, y V) la fraseología.
Entrenamiento específico para esta especificación de navegación
a) RNP-1 Básica STAR, SID, relacionados con los procedimientos de control:
I) técnicas de vectorización radar (cuando proceda); II) STAR abiertas y cerradas; III) las limitaciones de altitud, y IV) autorizaciones de descenso/ascenso;
b) aproximaciones RNP y procedimientos conexos; c) fraseología relacionada con la RNP-1 Básica y d) efectos de solicitudes de cambio de enrutamiento durante un procedimiento
ESTADO DEL MONITOREO
La infraestructuras de ayudas a la navegación deben ser monitoreadas y, cuando proceda, mantenida por el proveedor de servicios. Deben expedirse advertencias oportunas de los cortes mediante NOTAMs. El estado de la información debe proporcionarse de conformidad con el anexo 11 - Servicios de tránsito aéreo para las instalaciones de navegación o servicios que se pueden utilizar para soportar la operación.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-5
SISTEMA DE VIGILANCIA ATS
Demostrada la precisión de la navegación proporciona una base para determinar el espaciamiento de ruta lateral y horizontal y las mínimas de separación de tránsito necesario para operar en un procedimiento en particular. Cuando estén disponibles, las observaciones por radar de cada aeronave la proximidad a la trayectoria y altitud son notadas por las facilidades ATS y las capacidades de mantener la trayectoria son analizados. Si una observación y análisis indica que una pérdida de separación o de franqueamiento de obstáculos ha ocurrido, la razón para la aparente desviación de la trayectoria o de la altitud debe ser determinado y las medidas adoptadas para prevenir una recurrencia.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes En este capítulo se identifican los requisitos operacionales para las operaciones RNP-1 básica. El cumplimiento operacional de estos requisitos debería abordarse a través de reglamentos operativos nacionales, y pueden requerir una aprobación operacional específica, en algunos casos. Por ejemplo, los JAR-OPS 1 exige a los operadores aplicar al Estado del explotador/ del Registro, como proceda, para la aprobación operacional.
PROCESO DE APROBACIÓN Esta especificación de navegación no constituye en sí misma reglamentación y orientación contra el cual las aeronaves o los operadores serán evaluados y aprobados. Las aeronaves están certificadas por el Estado del fabricante. Los operadores aprobados de conformidad con sus normas operacionales nacionales. La especificación de navegación proporciona los criterios técnicos y operativos, y no implica la necesidad de re certificación. Los siguientes pasos deben ser completados antes de realizar operaciones RNP-1 Básica:
a) la elegibilidad de equipos de la aeronave deber ser determinado y documentado; b) los procedimientos operativos para el sistema de navegación que debe utilizarse y los procesos de la base de datos de navegación del operador debe estar debidamente documentados; c) El entrenamiento de la tripulación de vuelo sobre la base de los procedimientos operativos deben ser documentados:
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-6
d) el material documentado anteriormente debe ser aceptado por la autoridad reguladora del Estado, y e) la aprobación operacional deben ser obtenidos de conformidad con las normas de operacionales nacionales.
Tras la finalización con éxito de los pasos anteriores, una aprobación operacional RNP-1básica, Carta de Autorización o la especificación operacional adecuada (Especificaciones de Operaciones), en caso necesario, deberá ser expedido por el Estado. Elegibilidad de Aviones La elegibilidad de aeronaves tiene que ser determinada a través de la demostración del cumplimiento contra los criterios de aeronavegabilidad y los requisitos de “Requisitos de las Aeronave” El OEM o el titular de la homologación de la instalación de la aeronave, por ejemplo, STC titular, demostrara el cumplimiento a su autoridad nacional de aeronavegabilidad (NAA) (por ejemplo, la EASA, FAA) y la aprobación puede ser documentada en la documentación del fabricante (por ejemplo, cartas de servicios). El Manual de vuelo del avión (AFM), las entradas no son requeridas siempre que el Estado acepta la documentación fabricante. La aprobación operacional La evaluación de un operador en particular se haga por el Estado de matrícula de dicho operador, y de conformidad con las normas de operacionales nacionales (por ejemplo, los JAR-OPS 1, 14 CFR Parte 121) soportada a través de material de asesoramiento y orientación. La evaluación debería tener en cuenta:
a) pruebas de la elegibilidad de las aeronaves;
b) la evaluación de los procedimientos operativos para los sistemas de navegación que se utilice;
c) el control de estos procedimientos aceptables a través de entradas en el manual de operaciones;
d) la identificación de los requisitos de entrenamiento de la tripulación de vuelo, y
e) en caso necesario, el control de proceso de la base de datos de navegación.
La aprobación operacional será documentada a través del Estado que aprobó el certificado de operador aéreo (AOC) la cuestión a través de una carta de autorización (LOA), las especificaciones adecuadas de las operaciones (Ops Spec) o de enmienda al manual de operaciones.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-7
Descripción del equipo de la aeronave El operador deberá tener una lista que detalla la configuración de los componentes y los equipos pertinentes que se utilizarán para la RNP-1 básica. Documentación de Entrenamiento Los operadores comerciales deben tener un programa de formación para abordar las prácticas operacionales, procedimientos y temas relacionados con la formación de operaciones RNP-1básica (por ejemplo inicial, actualización o entrenamiento periódico para la tripulación de vuelo, despachadores o personal de mantenimiento). Nota.- No es necesario establecer un programa de entrenamiento por separado o en régimen si el entrenamiento RNAV es ya un elemento integrado de un programa de formación. Sin embargo, debería ser posible identificar los aspectos del RNP que son cubiertos dentro de un programa de formación. Los operadores privados deben estar familiarizados con las prácticas y procedimientos identificados en "conocimiento del piloto y el entrenamiento”. Operaciones manuales y listas de comprobación Las operaciones manuales y listas de chequeo para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos normalizados de trabajo detallados en “Procedimientos Operativos”. Los manuales apropiados deben contener instrucciones operacionales de navegación y procedimientos de contingencia, si se especifica. Los manuales y listas de chequeo deben ser sometidos a examen como parte del proceso de aplicación. Los operadores privados que operan con las prácticas y procedimientos identificados en "conocimiento del piloto y el entrenamiento”. Consideraciones de la Lista mínima de equipo (MEL) Cualquier revisión de la MEL necesarias para hacer frente a la RNP-1 básica las disposiciones debe ser aprobada. Los operadores deben ajustar la MEL, o equivalente, y especificar las condiciones de ejecución requeridas.
REQUISITOS DE LAS AERONAVES Los siguientes sistemas Cumplen con los requisitos de exactitud, integridad y la continuidad de estos criterios.
a) las aeronaves con sensor E/TSO-C129a (Clase B o C), E/TSO-C145 y los requisitos de FMS E/TSO-C115b, instalado para uso IFR de acuerdo con la FAA AC 20-130A;
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-8
b) las aeronaves con E/TSO-C129a clase A1 o E/TSO-C146 equipos instalados para el uso IFR de acuerdo con la FAA AC 20-138 o AC 20-138A;
c) las aeronaves con capacidad RNP certificadas o aprobadas con normas equivalentes.
El performance del sistema, monitoreo y alerta
Precisión: Durante las operaciones en el espacio aéreo o en rutas designadas como RNP-1 Básica, el error lateral total del sistema debe estar con una precisión de ± 1 NM al menos el 95 % del total de tiempo de vuelo. El error a lo largo de la trayectoria debe estar también dentro de ± 1 NM, por lo menos el 95 % del total de tiempo de vuelo. Para satisfacer el requisito de exactitud, en el 95 % del tiempo el FTE no debe exceder de 0,5 NM. Nota.- La utilización de un indicador de desviación con una deflexión de máxima escala de 1 MN ha demostrado ser un medio aceptable de cumplimiento. El uso de un piloto automático o director de vuelo ha sido encontrado para ser un medio aceptable de cumplimiento. Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como una falla mayor en virtud de la condición de aeronavegabilidad reglamentarias (es decir, 10-5 por hora). Continuidad: La pérdida de la función está clasificada como una condición de fallo menor si el operador puede revertir a un sistema de navegación diferente y proceder a un aeropuerto adecuado. El monitoreo de la performance y alerta: El sistema RNP, o la combinación del sistema RNP y el piloto, deberán proporcionar una alerta si el requisito de precisión no se cumple, o si la probabilidad de que el TSE lateral sea superior a 2 MN o sea mayor que 10-5. Señal en el espacio: Si se está utilizando el GNSS, el equipo de navegación de la aeronave deberá presentar una alerta si la probabilidad de que la señal en el espacio cause errores de posición lateral superior a 2 NM y supera el 10-7 por hora (Anexo 10, Volumen I, Tabla 3.7.2.4-1). Ver Volumen II Parte A Capítulo 2 página 2 de este manual Nota.- El cumplimiento con los requisitos del monitoreo de la performance y alerta no implica el monitoreo automático de errores técnicos de vuelo. La función de la vigilancia y alerta a bordo debería consistir, al menos, un algoritmo de vigilancia y alerta del error del sistema de navegación (NSE) y de una pantalla de desviación lateral que permita a la tripulación controlar el error técnico de vuelo (FTE). En la medida de los procedimientos operativos se utilizan para vigilar el FTE, el procedimiento de la tripulación, características de equipos, e instalación son evaluados por su eficacia y equivalencia, tal como se describe en los requisitos funcionales y los procedimientos
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-9
operativos. El error de definición de la trayectoria (PDE) se considera insignificante, debido a la calidad del proceso de garantía descrito en (Base de Datos de Navegación) y procedimientos de la tripulación descrita en (Procedimientos Operativos). Criterios específicos para los sistemas de navegación El RNP-1 básica está basado en el posicionamiento GNSS. Los datos de posicionamiento de otros tipos de sensores de navegación pueden ser integrados con el GNSS, los datos provistos de otros datos de sistemas de posicionamiento no causen errores de posición excediendo el error total del sistema (TSE) presupuestado. En caso contrario, se deben proporcionar los medios para deseleccionar los otros tipos de sensores de navegación. Los requisitos funcionales Las siguientes pantallas de visualización de navegación y funciones instaladas por la AC 20-130A y AC 20-138A o el material equivalente de asesoramiento de instalación de aeronavegabilidad requiere:
Parágrafo
Requisitos Funcionales
Explicación
a)
Los datos de navegación, incluyendo una indicación TO/FROM y un indicador de fallo, debe ser mostrado en una pantalla de desviación lateral (CDI, (E) HSI)) y/o una pantalla de mapas de navegación. Estos deben ser utilizados como instrumentos de vuelo primarios para la navegación de la aeronave, para la maniobra de anticipación y para fallos/estado/indicación de integridad. Ellos debe cumplir los siguientes requisitos:
Pantallas de desviación lateral no numéricas (por ejemplo, CDI, (S) HSI)), con una indicación TO/FROM y un anuncio de fallo, para su uso como instrumentos principales de vuelo para la navegación de la aeronave, la maniobra de anticipación, y para el fallo/estado/indicación de integridad, con las siguientes cinco atributos: 1) La pantalla debe ser visible para el piloto y ubicado en el campo principal de visión (± 15 grados de la línea normal de visión del piloto) cuando se mira hacia adelante siguiendo la trayectoria de vuelo. 2) La escala de la pantalla de desviación lateral debe estar de acuerdo con cualquier alerta y límites de anuncios, si se aplican. 3) La pantalla de desviación lateral debe tener una escala de deflexión completa y adecuada para la fase actual de vuelo y debe ser basado sobre la exactitud requerida del sistema total. 4) La escala de la pantalla puede ser configurada
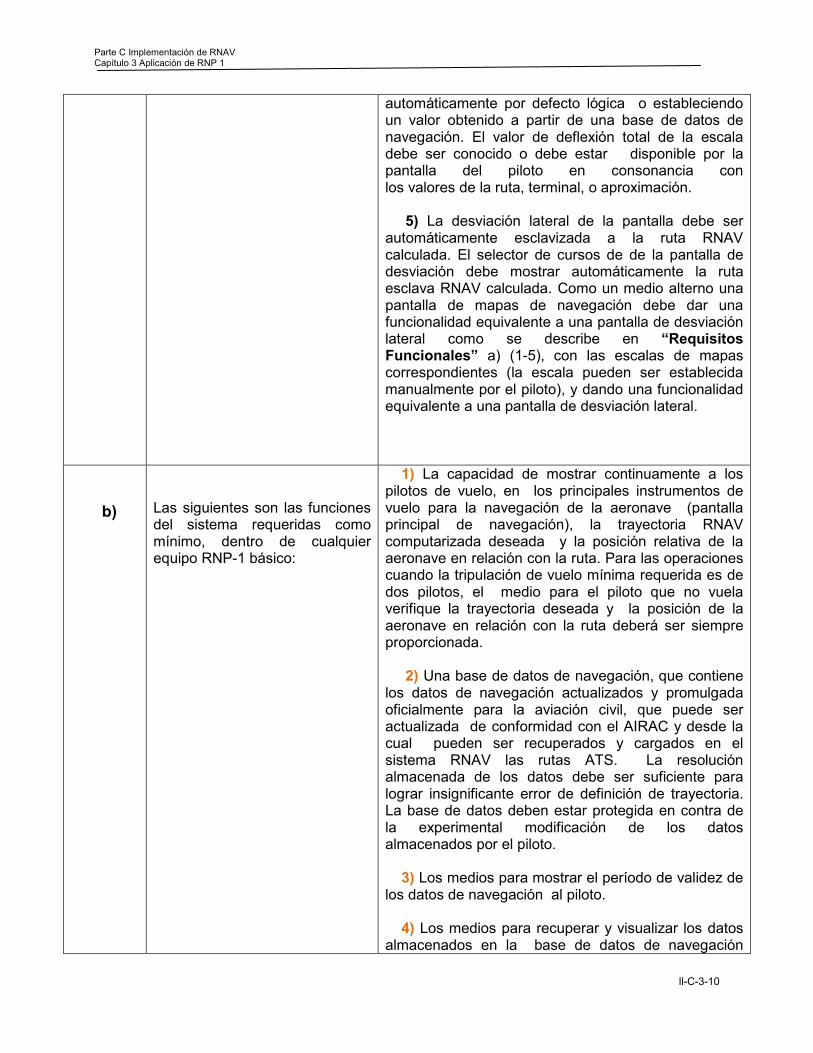
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-10
automáticamente por defecto lógica o estableciendo un valor obtenido a partir de una base de datos de navegación. El valor de deflexión total de la escala debe ser conocido o debe estar disponible por la pantalla del piloto en consonancia con los valores de la ruta, terminal, o aproximación. 5) La desviación lateral de la pantalla debe ser automáticamente esclavizada a la ruta RNAV calculada. El selector de cursos de de la pantalla de desviación debe mostrar automáticamente la ruta esclava RNAV calculada. Como un medio alterno una pantalla de mapas de navegación debe dar una funcionalidad equivalente a una pantalla de desviación lateral como se describe en “Requisitos Funcionales” a) (1-5), con las escalas de mapas correspondientes (la escala pueden ser establecida manualmente por el piloto), y dando una funcionalidad equivalente a una pantalla de desviación lateral.
b)
Las siguientes son las funciones del sistema requeridas como mínimo, dentro de cualquier equipo RNP-1 básico:
1) La capacidad de mostrar continuamente a los pilotos de vuelo, en los principales instrumentos de vuelo para la navegación de la aeronave (pantalla principal de navegación), la trayectoria RNAV computarizada deseada y la posición relativa de la aeronave en relación con la ruta. Para las operaciones cuando la tripulación de vuelo mínima requerida es de dos pilotos, el medio para el piloto que no vuela verifique la trayectoria deseada y la posición de la aeronave en relación con la ruta deberá ser siempre proporcionada. 2) Una base de datos de navegación, que contiene los datos de navegación actualizados y promulgada oficialmente para la aviación civil, que puede ser actualizada de conformidad con el AIRAC y desde la cual pueden ser recuperados y cargados en el sistema RNAV las rutas ATS. La resolución almacenada de los datos debe ser suficiente para lograr insignificante error de definición de trayectoria. La base de datos deben estar protegida en contra de la experimental modificación de los datos almacenados por el piloto. 3) Los medios para mostrar el período de validez de los datos de navegación al piloto. 4) Los medios para recuperar y visualizar los datos almacenados en la base de datos de navegación
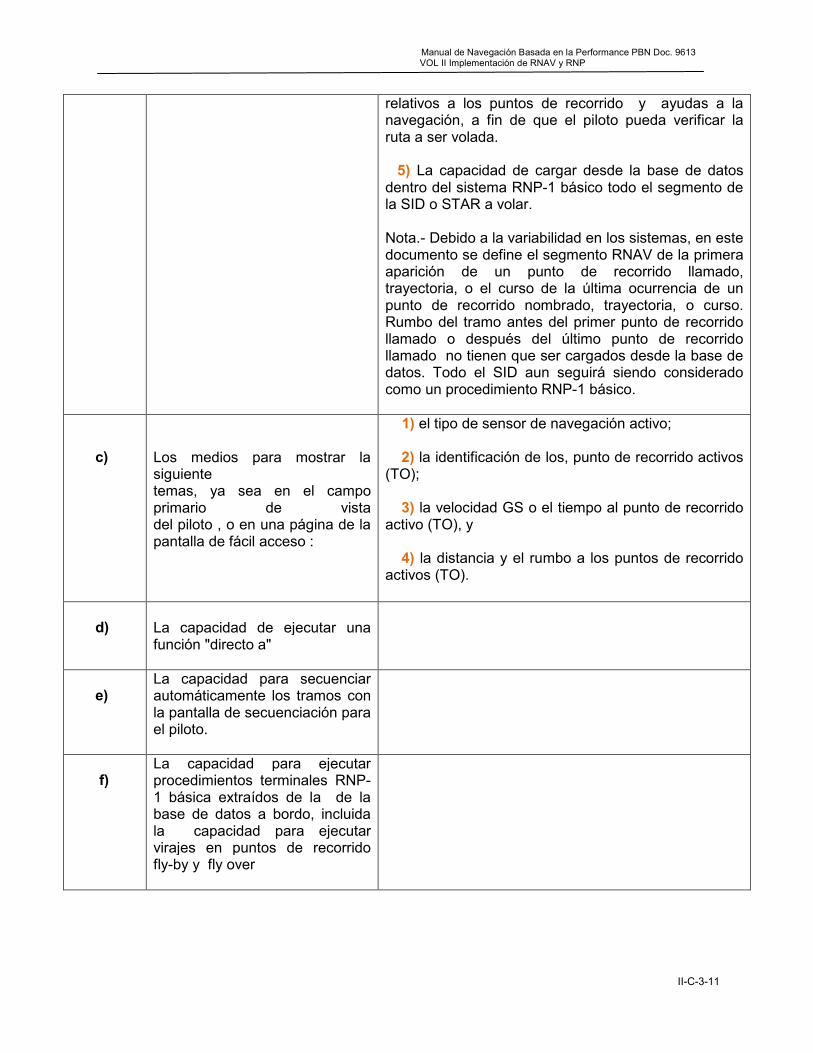
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-11
relativos a los puntos de recorrido y ayudas a la navegación, a fin de que el piloto pueda verificar la ruta a ser volada. 5) La capacidad de cargar desde la base de datos dentro del sistema RNP-1 básico todo el segmento de la SID o STAR a volar. Nota.- Debido a la variabilidad en los sistemas, en este documento se define el segmento RNAV de la primera aparición de un punto de recorrido llamado, trayectoria, o el curso de la última ocurrencia de un punto de recorrido nombrado, trayectoria, o curso. Rumbo del tramo antes del primer punto de recorrido llamado o después del último punto de recorrido llamado no tienen que ser cargados desde la base de datos. Todo el SID aun seguirá siendo considerado como un procedimiento RNP-1 básico.
c)
Los medios para mostrar la siguiente temas, ya sea en el campo primario de vista del piloto , o en una página de la pantalla de fácil acceso :
1) el tipo de sensor de navegación activo; 2) la identificación de los, punto de recorrido activos (TO); 3) la velocidad GS o el tiempo al punto de recorrido activo (TO), y 4) la distancia y el rumbo a los puntos de recorrido activos (TO).
d)
La capacidad de ejecutar una función "directo a"
e)
La capacidad para secuenciar automáticamente los tramos con la pantalla de secuenciación para el piloto.
f)
La capacidad para ejecutar procedimientos terminales RNP-1 básica extraídos de la de la base de datos a bordo, incluida la capacidad para ejecutar virajes en puntos de recorrido fly-by y fly over
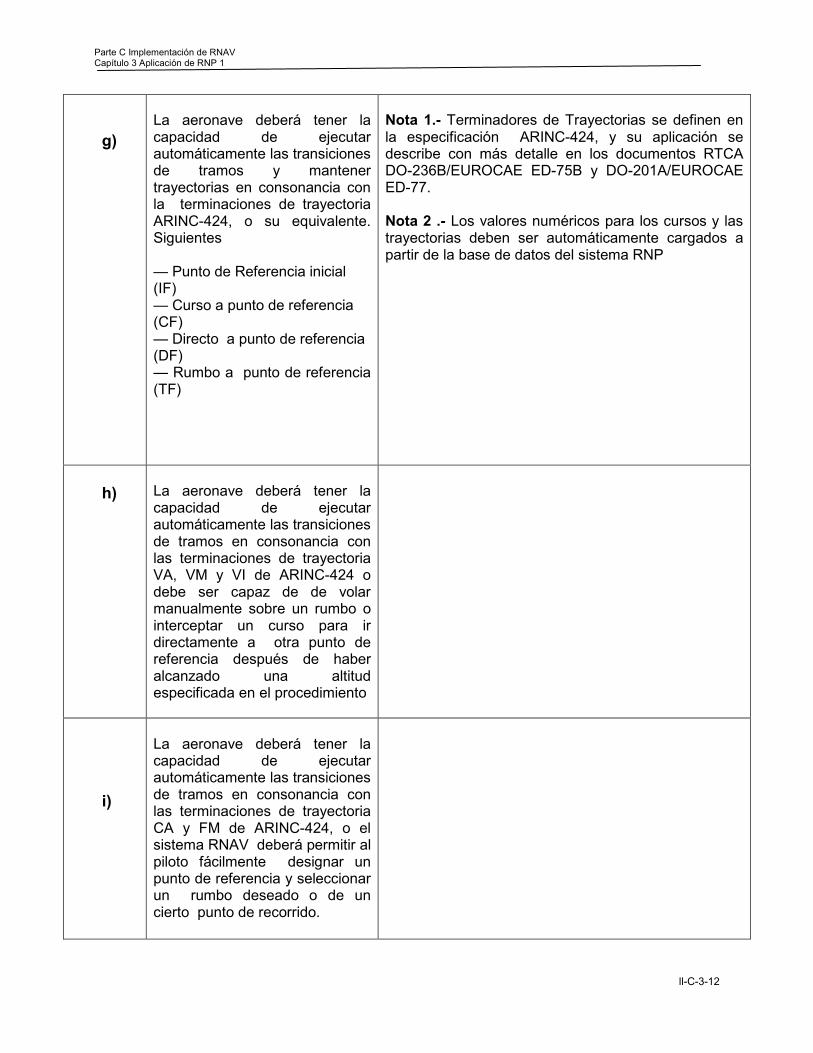
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-12
g)
La aeronave deberá tener la capacidad de ejecutar automáticamente las transiciones de tramos y mantener trayectorias en consonancia con la terminaciones de trayectoria ARINC-424, o su equivalente. Siguientes — Punto de Referencia inicial (IF) — Curso a punto de referencia (CF) — Directo a punto de referencia (DF) — Rumbo a punto de referencia (TF)
Nota 1.- Terminadores de Trayectorias se definen en la especificación ARINC-424, y su aplicación se describe con más detalle en los documentos RTCA DO-236B/EUROCAE ED-75B y DO-201A/EUROCAE ED-77. Nota 2 .- Los valores numéricos para los cursos y las trayectorias deben ser automáticamente cargados a partir de la base de datos del sistema RNP
h)
La aeronave deberá tener la capacidad de ejecutar automáticamente las transiciones de tramos en consonancia con las terminaciones de trayectoria VA, VM y VI de ARINC-424 o debe ser capaz de de volar manualmente sobre un rumbo o interceptar un curso para ir directamente a otra punto de referencia después de haber alcanzado una altitud especificada en el procedimiento
i)
La aeronave deberá tener la capacidad de ejecutar automáticamente las transiciones de tramos en consonancia con las terminaciones de trayectoria CA y FM de ARINC-424, o el sistema RNAV deberá permitir al piloto fácilmente designar un punto de referencia y seleccionar un rumbo deseado o de un cierto punto de recorrido.
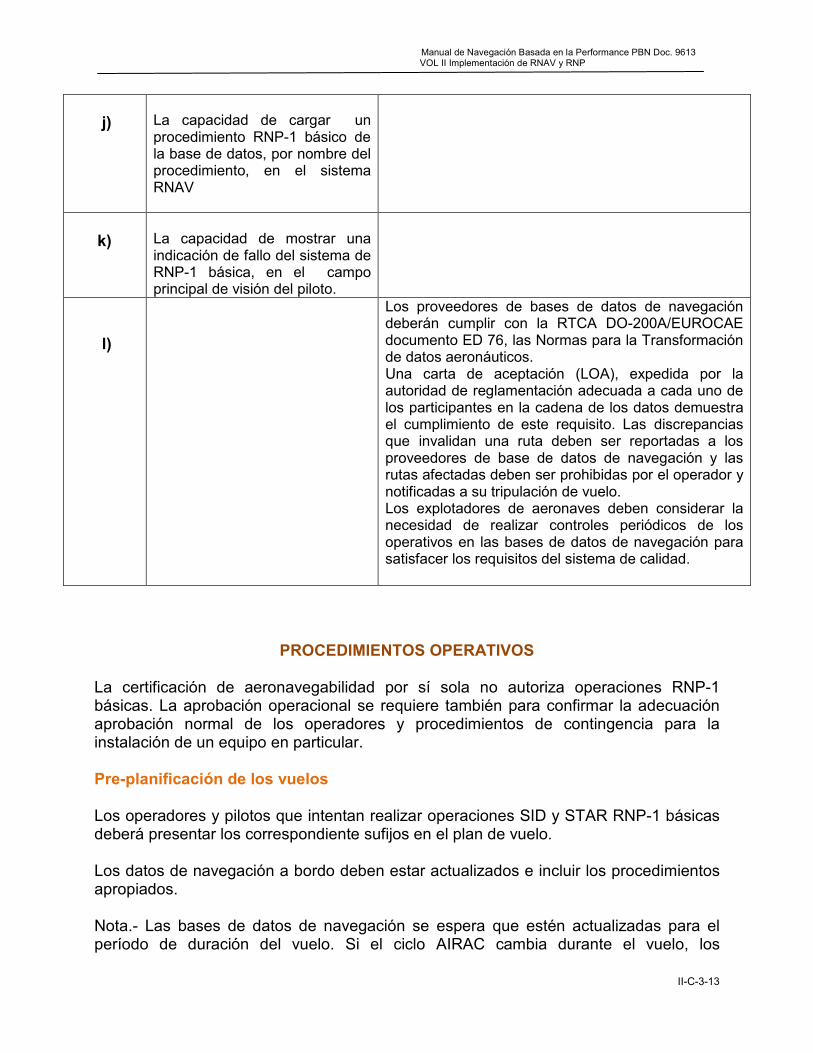
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-13
j)
La capacidad de cargar un procedimiento RNP-1 básico de la base de datos, por nombre del procedimiento, en el sistema RNAV
k)
La capacidad de mostrar una indicación de fallo del sistema de RNP-1 básica, en el campo principal de visión del piloto.
l)
Los proveedores de bases de datos de navegación deberán cumplir con la RTCA DO-200A/EUROCAE documento ED 76, las Normas para la Transformación de datos aeronáuticos. Una carta de aceptación (LOA), expedida por la autoridad de reglamentación adecuada a cada uno de los participantes en la cadena de los datos demuestra el cumplimiento de este requisito. Las discrepancias que invalidan una ruta deben ser reportadas a los proveedores de base de datos de navegación y las rutas afectadas deben ser prohibidas por el operador y notificadas a su tripulación de vuelo. Los explotadores de aeronaves deben considerar la necesidad de realizar controles periódicos de los operativos en las bases de datos de navegación para satisfacer los requisitos del sistema de calidad.
PROCEDIMIENTOS OPERATIVOS La certificación de aeronavegabilidad por sí sola no autoriza operaciones RNP-1 básicas. La aprobación operacional se requiere también para confirmar la adecuación aprobación normal de los operadores y procedimientos de contingencia para la instalación de un equipo en particular. Pre-planificación de los vuelos Los operadores y pilotos que intentan realizar operaciones SID y STAR RNP-1 básicas deberá presentar los correspondiente sufijos en el plan de vuelo. Los datos de navegación a bordo deben estar actualizados e incluir los procedimientos apropiados. Nota.- Las bases de datos de navegación se espera que estén actualizadas para el período de duración del vuelo. Si el ciclo AIRAC cambia durante el vuelo, los
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-14
operadores y los pilotos deben establecer los procedimientos para garantizar la exactitud de los datos de navegación, incluida la adecuación de las instalaciones de navegación utilizadas para definir las rutas y los procedimientos de vuelo. La disponibilidad de la infraestructura de ayudas a la navegación, requeridas para las rutas destinadas, incluyendo cualquier contingencia no-RNAV, deberá ser confirmada durante el período de operación utilizando toda la información disponible. Desde la integridad GNSS (señal RAIM o SBAS) es requerido por el Anexo 10, la disponibilidad de estos también debe determinarse como apropiado. Para las aeronaves navegando con receptores SBAS (todos con TSO-C145/C146), los operadores deben comprobar la adecuada disponibilidad RAIM GPS en las zonas donde la señal SBAS no está disponible. Disponibilidad ABAS Los niveles RAIM necesarios para la RNP-1 básica pueden ser verificados, ya sea a través de NOTAMs (donde esté disponible) o por medio de los servicios de predicción. La autoridad de operaciones ofrecen orientaciones concretas sobre la manera de cumplir con este requisito (por ejemplo, si se dispone de suficientes satélites, una predicción puede no ser necesaria). Los operadores deben estar familiarizados con la información de predicción disponible por la ruta prevista. La disponibilidad de predicción RAIM debe tener en cuenta los últimos NOTAMs de la constelación GPS y modelos de aviónica (si están disponibles). El servicio puede ser proporcionado por la ANSP, fabricante de aviónica y de otras entidades o a través de la capacidad de predicción RAIM del receptor en vuelo. En el caso de que se pronostique una continua pérdida de nivel adecuado de detección de fallos de más de cinco minutos para cualquier parte de la operación RNP-1 básica, la planificación de los vuelos deben ser revisados (por ejemplo, retrasando la salida o la planificación un procedimiento de salida diferente). La disponibilidad del software de predicción RAIM no garantiza el servicio, por el contrario, son herramientas para evaluar la capacidad de espera para atender las actuaciones de navegación requerida. Debido a la falta imprevista de algunos elementos GNSS, los pilotos/ANSP deben darse cuenta de que el RAIM o la navegación GPS pueden perderse por completo en el aire, mientras que puede requerir de una reversión como alternativa de medio de navegación. Por lo tanto, los pilotos deben evaluar su capacidad para navegar (potencialmente a un destino alterno) en caso de fallo de la navegación GPS. Procedimientos generales de funcionamiento El piloto debe cumplir con cualquier instrucción o procedimiento identificado por el fabricante, según sea necesario para cumplir con los requisitos de desempeño en este capítulo
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-15
Nota.- Los pilotos deben atenerse a las limitaciones del AFM o los procedimientos operativos necesarios para mantener RNP-1 Básica de rendimiento para el SID o STAR. Los operadores y los pilotos no deberían pedir o fijar procedimientos RNP-1 básicos a menos que cumplen con todos los criterios en los documentos del Estado. Si una aeronave que no se ajusta a estos criterios recibe una autorización de ATC para llevar a cabo un procedimiento RNP-1 básico, el piloto deberá informar al ATC que él o ella es incapaz de aceptar la autorización y debe solicitar una instrucción de alternativa. En la inicialización del sistema, los pilotos deben confirmar que la base de datos de navegación esta actualizada y verificar que la posición de la aeronave ha sido introducida correctamente. Los pilotos deben comprobar la correcta entrada de su ruta ATC asignada de la autorización inicial y cualquier cambio subsecuente de ruta. Los pilotos deben asegurarse de que la secuencia de puntos de recorrido representado por su sistema de navegación coincide con la ruta descrita en la carta de navegación apropiada (s) y su ruta asignada. Los pilotos no deben volar una SID o STAR RNP-1 básica si no es recuperable por el nombre del procedimiento desde la base de datos de navegación a bordo y conforme al procedimiento descrito en la carta. Sin embargo, el procedimiento puede ser posteriormente modificado a través de la inserción o supresión de puntos de recorrido específicos en respuesta a las autorizaciones ATC. La entrada manual, o la creación de nuevos puntos de recorrido, por la introducción manual de la latitud y la longitud o valores rho/theta no está permitido. Además, los pilotos no deben cambiar cualquier punto de recorrido Fly-by a Fly-over de la base de datos de una SID o STAR Las tripulaciones de vuelo deben hacer un chequeo cruzado del plan de vuelo autorizado mediante la comparación de las cartas u otros recursos aplicables con el sistema de navegación la pantalla de texto y la pantalla de mapas de la aeronave, en su caso. Si es requerido, la exclusión de determinadas ayudas a la navegación debe ser confirmada. Nota.- Los pilotos pueden notar una ligera diferencia entre la información de navegación representada sobre la carta y su pantalla principal de navegación. Las diferencias de 3 grados o menos puede ser el resultado de la aplicación de la declinación magnética de equipo por parte del fabricante y operacionalmente es aceptable.
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-16
El chequeo cruzado con las ayudas a la navegación convencionales no es necesario, ya que la falta de integridad y alerta se considera suficiente para satisfacer las necesidades de integridad. Sin embargo, el monitoreo de la razonabilidad de navegación es sugerida, y cualquier pérdida de la capacidad RNP, será reportada al ATC. Para las rutas RNP-1 Básica, los pilotos deben utilizar un indicador de desviación lateral, director de vuelo o piloto automático en modo de navegación lateral. Pilotos de aeronaves con una pantalla de desviación lateral deben garantizar que la escala de desviación lateral es adecuada para la precisión de la navegación asociadas con la ruta o procedimiento (por ejemplo, la deflexión total de la escala: ± 1 NM para RNP- 1básica). Se espera que todos los pilotos mantengan el eje central de la ruta o procedimiento, como se describe a bordo por el indicador de desviación lateral y/o guiado de vuelo durante todas las operaciones RNP-1 básica que se describen en este manual, a menos que la desviación sea autorizada por el ATC o en condiciones de emergencia. Para las operaciones normales, el error perpendicular a la trayectoria/desviación (la diferencia entre la trayectoria calculada por el sistema y la posición de la aeronave con relación a la ruta, es decir, FTE) debe limitarse a ± ½ de la precisión de navegación asociados con el procedimiento (es decir, 0,5 NM para la RNP-1básica). Breve desviaciones de esta norma (por ejemplo, overshoots o undershoots) durante e inmediatamente después de los virajes, hasta un máximo de una vez la precisión de la navegación (es decir, de 1,0 NM RNP-1Básica) son admisibles. Nota.- Algunos aviones no muestran o calculan una trayectoria durante los virajes, por lo tanto, los pilotos de estos aviones no pueden ser capaces de adherirse a la precisión lateral de ±½ de la navegación durante los virajes, pero aún se espera cumplan la norma durante interceptación de los siguientes virajes y en segmentos rectos. Si el ATC emite una asignación de rumbo que tome una aeronave fuera de una ruta, el piloto no debe modificar el plan de vuelo en el sistema RNP hasta que una autorización es recibida para reincorporarse a la ruta o el controlador confirma una nueva ruta autorizada. Cuando la aeronave no está en la ruta RNP-1 básica publicada el requisito de precisión especificado no se aplica. La selección manualmente del banqueo de la aeronave limita funciones que pueden reducir la capacidad de la aeronave a fin de mantener su trayectoria deseada y no son recomendables. Los pilotos deben reconocer que los ajustes manuales de banqueo de los aviones limitan sus funciones y podría reducir su capacidad para satisfacer las expectativas de las trayectorias ATC, especialmente cuando se ejecutan virajes a gran ángulo.Esto no debería ser interpretado como un requisito para desviarse de los procedimientos de vuelo manual del avión, los pilotos deberían ser alentados a limitar la selección de las funciones dentro de los procedimientos.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-17
Aeronaves con capacidad de selección de la RNP Pilotos de aeronaves con capacidad de selección de entrada RNP deben seleccionar RNP-1 o inferior, para SID y STAR RNP-1 básica. Requisitos específicos SID RNP-1 básica Antes de iniciar el despegue, el piloto de la aeronave debe verificar que el sistema está disponible para la RNP-1 Básicos, y funcionamiento correctamente, y el correcto aeropuerto y los datos de la pista están cargados. Antes de vuelo, los pilotos deben comprobar su sistema de navegación de las aeronaves está funcionando correctamente y el correcto procedimiento de salida de pista e (incluidos cualquier transición en ruta aplicables) se introducen y se muestran correctamente. Pilotos que se les asigna un procedimiento de salida RNP-1 básico y posteriormente, reciben un cambio de pista, el procedimiento o transición debe verificar que los cambios apropiados se introducen y están disponibles para la navegación antes del despegue. Se recomienda una última comprobación de la correcta entrada de pista y representación de la ruta correcta, poco antes del despegue. Obligación de altitud. El piloto debe ser capaz de utilizar equipo RNP-1 básico para seguir el guiado de vuelo RNAV lateral a más tardar en 153 m (500 pies) sobre la altitud del aeropuerto. Los pilotos deben utilizar un método autorizado (indicador de desviación lateral/ pantalla de mapas de navegación/ director de vuelo y piloto automático) para alcanzar un adecuado nivel de rendimiento para RNP-1básico. Aeronaves con GNSS. Cuando se usa GNSS, la señal debe ser adquirida antes de que comience la carrera de despegue. Para las aeronaves que utilicen equipo TSO-C129a, el aeropuerto de salida debe ser cargado en el plan de vuelo a fin de lograr el adecuado monitoreo y sensibilidad del sistema de navegación. Para las aeronaves que utilicen aviónica TSO-C145/C146, si la salida comienza en un punto de recorrido de la pista, entonces el aeropuerto de salida no necesita estar en el plan de vuelo para obtener adecuado monitoreo y sensibilidad. Si el SID RNP-1 básica se extiende más allá de 30 NM del ARP y un indicador de desviación lateral se utiliza, su sensibilidad a escala completa debe ser seleccionada a no más de 1 NM entre 30 NM de la ARP y la terminación del SID l RNP-1básica. Para las aeronaves que utilicen una pantalla de desviación lateral (es decir, pantalla de mapas de navegación), la escala debe ser establecida para SID RNP-1 básica, y el director de vuelo o piloto automático debe ser usado. Requisitos específicos STAR RNP-1 Básica Antes de la fase de llegada, la tripulación de vuelo debe verificar que la ruta terminal se haya cargada correctamente. El plan de vuelo activo debe verificarse mediante la comparación de las cartas con la pantalla de mapas (si es aplicable) y el MCDU (Multifunction Control Display Unit). Esto incluye la confirmación de la secuencia del
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-18
punto de recorrido, el carácter razonable de los ángulos de trayectoria y distancias, cualquier limitación de altitud o velocidad, y, cuando sea posible, que puntos de recorrido son Fly-by y cuales son Fly- Over. Si es requerido para una ruta, un chequeo hay que hacerse para confirmar que la actualización se excluye una ayuda a la navegación. Una ruta no debe utilizarse si existe duda en cuanto a la validez de la ruta en la base de datos de navegación. Nota.- Como mínimo, los controles de la llegada podría ser una simple inspección de la pantalla de mapas que consiga los objetivos de este parágrafo. La creación de nuevos puntos de recorrido de entrada manual en el sistema por la tripulación de vuelo para la RNP-1 básico anularía la ruta y no está permitido. En donde los procedimientos de contingencia requieren la reversión a una ruta de llegada convencional, los preparativos necesarios deben ser completados antes del comienzo del procedimiento RNP-1 básica. La modificación del Procedimiento en el área terminal puede tomar la forma de vectores radar o autorizaciones "directo a " y la tripulación de vuelo debe ser capaz de reaccionar de manera oportuna. Esto puede incluir la inserción de puntos de recorrido tácticos cargados desde la base de datos. La entrada manual o la modificación de la ruta cargada por la tripulación de vuelo, utilizando puntos de recorrido temporales o puntos de referencia que no figuraban en la base de datos, no está permitido. Los pilotos deben comprobar que el sistema de navegación de la aeronave está funcionando correctamente y el correcto procedimiento de llegada y la pista (incluyendo cualquier transición) se introducen y se muestran correctamente. Aunque un método en particular no es mandatorio, cualquier limitación de altitud y velocidad publicada debe ser observada. Aeronaves con sistemas RNP GNSS TSO-C129a: Si la STAR RNP-1 básica comienza más allá de 30 NM del ARP y un indicador de desviación lateral se utiliza, el valor máximo de sensibilidad de la escala debe ser seleccionada manualmente a no más de 1 NM antes de comenzar el STAR. Para las aeronaves que utilicen una pantalla de desviación lateral (es decir, pantalla de mapas de navegación), la escala debe ser establecida para la STAR RNP-1 básico, y el director de vuelo o piloto automático debe ser usado. Procedimientos de Contingencia El piloto debe notificar al ATC de cualquier pérdida de la capacidad de la RNP (alertas de integridad o la pérdida de la navegación), junto con el curso de acción propuesto. Si no puede cumplir con los requisitos de una SID o STAR RNP-1 básico por cualquier razón, los pilotos deben avisar al ATS, tan pronto como sea posible.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-19
La pérdida de la capacidad RNP incluye cualquier fallo o evento causante de que la aeronave ha dejado de cumplir los requisitos de la ruta RNP-1 básica. En el caso de fallo de las comunicaciones, la tripulación de vuelo debe continuar con el procedimiento publicado de falla de comunicaciones. Conocimiento del Piloto y Entrenamiento El programa de formación debería proporcionar una formación suficiente (por ejemplo, el simulador, dispositivos de entrenamiento, o la aeronave) en el sistema RNP de la aeronave en la medida en que los pilotos están familiarizados con lo siguiente:
a) la información en este capítulo;
b) el significado y el uso adecuado del equipo de la aeronave/ sufijos de navegación;
c) las características del procedimiento que se determinan en la representación cartográfica y la descripción textual;
d) descripción de los tipos de puntos de recorrido ("Fly-by y Fly Over) y terminaciones de trayectorias (previstas en Requisitos Funcionales ARINC-424 terminaciones de trayectorias) y cualquier otro tipo utilizados por el operador, así como trayectorias de vuelo asociados con las aeronaves;
e) equipo de navegación requerido para la operación RNP-1 básica en SID y STAR,
f) información específica del sistema RNP:
I) los niveles de automatización, modos de anuncios, cambios, alertas, interacciones, reversiones, y la degradación;
II) la integración funcional con otros sistemas de la aeronave;
III) el significado y la conveniencia de discontinuidades de la ruta, así como los procedimientos relacionados con la tripulación de vuelo;
IV) los procedimientos del piloto en consonancia con la operación;
V) los tipos de sensores de navegación utilizados por el sistema RNP y sistemas asociados con la priorización / ponderación / lógica;
VI) con anticipación a su vez en cuenta la velocidad y altitud efectos;
VII) la interpretación de pantallas electrónicas y los símbolos;
VII) la comprensión de la configuración de la aeronave y las condiciones operativas necesarias para apoyar operaciones RNP-1 básicas, es decir, una selección adecuada de la escala CDI (la escala de la pantalla de desviación lateral);
g) sistema de procedimientos operativos RNP, según proceda, incluida la forma de cómo realizar las siguientes acciones:
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-20
I) verificar la actualidad y la integridad de los datos de navegación de la aeronave;
II) verificar la finalización con éxito de las auto-pruebas del sistema RNP;
III) inicializar la posición del sistema de navegación;
IV) recuperar y volar una SID o STAR RNP-1 básicos con la transición apropiada;
V) adherirse a limitaciones de velocidad y/o altitud asociadas con una SID o STAR RNP-1básico;
VI) seleccionar la SID o STAR RNP-1 básica para la pista activa en uso y estar familiarizado con procedimientos para hacer frente a un cambio de pista;
VII) verificar los puntos de recorrido y programación del plan de vuelo;
VIII) volar directo a un punto de recorrido;
IX) volar un curso / trayectoria a un punto de recorrido;
X) interceptar un curso / trayectoria;
XI) volando vectores radar y reincorporarse a una ruta RNP-1 básica desde el modo rumbo
XII) determinar el error perpendicular a la derrota/desviación. Más concretamente, la desviación máxima permitida para soportar las RNP-1 básicas debe ser entendida y respetada;
XIII) resolver discontinuidades de ruta;
XIV) quitar y re seleccionar la entrada de un sensor de navegación;
XI) cuando sea necesario, confirmar la exclusión de una ayuda para la navegación específica o tipo de ayuda a la navegación;
XVI) cambiar el aeropuerto de llegada y aeropuerto de alternativa;
XVII) la función de realizar vuelos paralelos compensados si existe la capacidad. Los pilotos deben saber cómo se aplican las compensaciones, la funcionalidad de su sistema particular RNP y la necesidad de avisar al ATC si esta funcionalidad no está disponible;
XVIII) La función de realizar esperas RNAV;
h) los niveles de automatización recomendados por el operador para la fase de vuelo y el volumen de trabajo, incluidos los métodos para reducir al mínimo el error transversal a la derrota para mantener el eje central de la ruta;
i) fraseología R/T para aplicaciones RNAV/RNP, y
j) procedimientos de contingencia para fallos RNAV/RNP
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-3-21
Bases de Datos de Navegación La base de datos de navegación deberán obtenerse a partir de un proveedor que cumpla con el documento RTCA DO 200A/EUROCAE ED 76, Normas para el procesamiento de datos aeronáuticos, y debe ser compatible con la función del equipo (de referencia Anexo 6 OACI, Parte 1, Capítulo 7). Una carta de aceptación (LOA), expedida por la autoridad reguladora para cada uno de los participantes en la cadena de los datos que demuestren el cumplimiento de este requisito (por ejemplo, LOA FAA de conformidad con la FAA AC 20-153 o LOA EASA expedida de conformidad con la EASA IR 21 sub parte G). Las discrepancias que invalidan una SID o STAR deben ser reportadas a los proveedores de base de datos de navegación y la SID o STAR afectadas deben ser prohibidas por el operador mediante un aviso a su tripulación de vuelo. Los explotadores de aeronaves deben considerar la necesidad de realizar controles periódicos de las bases de datos operacionales de navegación a fin de satisfacer los requisitos del sistema de calidad. Nota.- Para minimizar el error de definición de trayectoria, la base de datos debe cumplir con la DO 200A, o un medio operacional equivalente debe estar en vigor para garantizar la integridad de la base de datos para SID o STAR RNP-1 básicos. Supervisión de los operadores Una autoridad reguladora debería considerar la posibilidad de cualquier informe de error de navegación para determinar medidas correctivas. La ocurrencia repetida de errores de navegación son hechos atribuidos a una pieza específica del equipo de navegación y puede resultar en la cancelación de la aprobación por la utilización de dicho equipo. La Información que indica la potencial reincidencia de errores puede requerir una modificación del programa de entrenamiento del operador. La información que atribuye a múltiples errores de un piloto en particular de la tripulación puede requerir correctivas del entrenamiento o revisión de la licencia.
Parte C Implementación de RNAV Capítulo 3 Aplicación de RNP 1
ll-C-3-22
REFERENCIAS
Copias de documentos de EUROCONTROL pueden ser solicitadas a EUROCONTROL, Centro de Documentación, GS4, Rue de la Fusee, 96, B-1130 Bruselas, Bélgica; (Fax: 32 2 729 9109). Sitio web: http://www.ecacnav.com Copias de documentos de EUROCAE pueden ser compradas a EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia (Fax: +33 1 46 55 62 65). Sitio web: www.eurocae.eu Copias de documentos de la FAA pueden ser obtenidas a partir de Superintendente de Documentos, Government Printing Office, Washington, DC 20402-9325, EE.UU.. Sitio web: http://www.faa.gov/aircraft_cert/ (Biblioteca de Orientación y de regulación) Copias de los documentos RTCA pueden ser obtenidas de RTCA Inc., 1140 Connecticut Avenue, NW, Suite 1020, Washington, DC 20036-4001, EE.UU., (Tel.: 1 202 833 9339). Sitio web: www.rtca.org Copias de los documentos ARINC pueden ser obtenidas de Aeronautical Radio, Inc., 2551 Riva Road, Annapolis, Maryland 24101-7465, EE.UU.. Sitio web: http://www.arinc.com Copias de documentos JAA JAA están disponibles en el editor de Information Handling Services (IHS). Información sobre los precios, dónde y cómo realizar un pedido, está disponible en el sitio web de las JAA: http://www.jaa.nl y en el IHS sitios web: http://www.global.his.com y http://www.avdataworks.com Copias de documentos de la AESA puede obtenerse de la AESA (Agencia Europea de Seguridad Aérea), 101253, D-50452 Koln, Alemania. Copias de los documentos de la OACI pueden ser adquiridos en la Organización de Aviación Civil Internacional, Servicios al Cliente Unidad, 999 University Street, Montreal, Quebec, Canadá H3C 5H7 (Fax: 1 514 954 6769 o por e-mail: [email protected]) oa través de agentes de venta que figuran en el sitio web de la OACI: www.icao.int
II-C-4-1
CAPÍTULO 4
IMPLEMENTACION RNP-1 AVANZADO
A desarrollar.

II-C-5-1
CAPÍTULO 5
APLICACIÓN RNP APCH
INTRODUCCIÓN
Antecedentes
Este capítulo aborda la aplicación de aproximaciones basadas en GNSS que son clasificadas como RNP APCH de acuerdo con el concepto PBN.Los procedimientos de aproximación RNP (RNP APCH) incluyen procedimientos de aproximación RNAV (GNSS) diseñados con un segmento recto. Los procedimientos de aproximación RNP APCH se espera que sean autorizados por un número de agencias reguladoras, incluida la Agencia Europea de Seguridad Aérea (EASA) y la Administración Federal de Aviación (FAA) de Estados Unidos. La FAA ha publicado los criterios de aeronavegabilidad, AC20-138A, para equipos GNSS y sistemas que son elegibles para este tipo de operaciones. La EASA desarrollo material de certificación (series AMC20) para la aprobación de aeronavegabilidad y criterios operacionales para operaciones de aproximación RNP (RNP APCH). Aunque similares en los requisitos funcionales, hay ligeras diferencias entre estos dos conjuntos de criterios de aeronavegabilidad. Con el fin de alcanzar un estándar global, los dos conjuntos de criterios armonizados en un único estándar de navegación.
PROPÓSITO En este capítulo se proporciona orientación a los Estados para la implementación de operaciones RNP APCH (excluyendo operaciones RNP AR APCH) y provee a los ANSP una recomendación de la OACI sobre requisitos de la implementación. Proporciona a los operadores una combinación de criterios operacionales RNAV y aeronavegabilidad de Europa y Estados Unidos. Para los actuales sensores autónomos y sistemas RNAV multi-sensores que utilizan el GNSS, el cumplimiento de ambos Europeo (EASA AMC 20) y Estados Unidos (FAA AC 20-138A, AC 20-130A o TSO C115b) La orientación asegura automático cumplimiento de la presente especificación de OACI, evitando la necesidad de una mayor evaluación de la documentación o AFM. La aprobación operacional a esta norma permite a un operador para llevar a cabo las operaciones RNP APCH a nivel mundial.
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-2
Nota.- Los sistemas multi-sensores pueden utilizar otras combinaciones de sensores, tales como DME/DME y DME/DME/IRU que suministre la performance de navegación aceptable para RNP APCH. Sin embargo, estos casos son limitados debido al aumento de complejidad en la infraestructura de ayudas a la navegación y requisitos de evaluación y no son prácticos o costo-beneficio para la aplicación generalizada. En este capítulo se aborda únicamente el requisito para el aspecto de navegación lateral (navegación 2D) a lo largo de segmentos rectos. Aproximaciones en curva se abordan en la RNP AR APCH. Los aspectos de navegación vertical Barométrica es abordada en el Anexo A de este volumen.
CONSIDERACIONES ANSP
Infraestructura Ayudas a la navegación El GNSS es el sistema de navegación primario en apoyo a los procedimientos RNP APCH. El segmento de aproximación frustrada podrá basarse en ayudas a la navegación convencionales (por ejemplo, VOR, DME, NDB). La aceptabilidad del riesgo de pérdida de la capacidad RNP APCH para múltiples aviones por satélite debido a la falla o la pérdida de las funciones de vigilancia y alerta a bordo (por ejemplo, agujeros RAIM), debe ser considerado por la autoridad responsable del espacio aéreo. Comunicaciones y Vigilancia ATS RNP APCH no incluye requisitos específicos para la comunicación o la vigilancia ATS. Un adecuado franqueamiento de obstáculos se logra a través del rendimiento de las aeronaves y de procedimientos de operación. Franqueamiento de Obstáculos Orientaciones detalladas sobre franqueamiento de obstáculos se proporcionan en los PANS-OPS (OACI Doc. 8168, Volumen II), en los criterios generales de las partes I y III. Los procedimientos de aproximación frustrada puede ser, bien apoyados por RNAV o segmentos convencionales (por ejemplo, basados en, NDB, VOR, DME). El diseño del Procedimiento debe tener en cuenta la ausencia de la capacidad de navegación vertical de la aeronave. Consideraciones Adicionales
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-3
Muchas aeronaves tienen la capacidad para ejecutar una maniobra de circuito de espera usando su sistema RNP. La orientación en este capítulo no sustituye los adecuados requisitos de funcionamiento de la condición del equipo
PUBLICACIÓN En la AIP se debería indicar claramente que la aplicación de navegación es RNP APCH. El diseño del procedimiento debe basarse en los perfiles normales de descenso y la condición de publicación debe identificar los requisitos de altitud mínima del segmento, incluyendo una LNAV OCA (H). Si el segmento de aproximación frustrada se basa en medios convencionales, instalaciones de ayudas a la navegación que son necesarias para realizar la aproximación debe ser identificada en las publicaciones pertinentes. Los datos de navegación publicados en el AIP del Estado para los procedimientos y ayudas a la navegación que la soportan deberán cumplir los requisitos del Anexo 4 - Cartas Aeronáuticas y Anexo 15 - Servicios de información aeronáutica (según proceda).Todos los procedimientos deben basarse en coordenadasWGS-84. Entrenamiento del Controlador Los controladores de tránsito aéreo, que prestan servicios de control en los aeropuertos, donde han sido implementadas aproximaciones RNP, deberán haber completado el entrenamiento que cubre los temas que figuran a continuación Entrenamiento Básico
a) ¿Cómo trabajan los sistemas de navegación área (en el contexto de esta especificación de navegación):
I) incluir la capacidad funcional y las limitaciones de esta especificación de navegación;
II) la precisión, integridad, disponibilidad y continuidad a bordo entre ellos monitoreo del rendimiento y alerta;
II) el receptor GPS, RAIM, FDE, la integridad y las alertas;
IV) concepto de puntos de recorrido "Fly-By frente al Fly Over (y los diferentes rendimientos de virajes);
b) requisitos del plan de vuelo;
c) los procedimientos ATC;
I) procedimientos de contingencia ATC;
II) las mínimas de separación;
III) medio ambiente de equipo mixto;
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-4
IV) la transición entre los distintos entornos operativos, y
V) La fraseología.
Entrenamiento específico para esta especificación de navegación
a) los procedimientos relacionados con el control:
- Técnicas de Vectorización radar (cuando proceda);
b) Aproximaciones RNP y procedimientos conexos:
i) incluyendo aproximaciones en barra T y Y
ii) los mínimos de aproximación;
c) el impacto de solicitar un cambio de enrutamiento durante un procedimiento.
ESTADO DEL MONITOREO
La infraestructura de ayudas a la navegación debe ser monitoreada y, en su caso, mantenida por el proveedor de servicios. Las advertencias oportunas de los cortes deben expedirse mediante (NOTAMs). La condición de la información debe proporcionarse de conformidad con el anexo 11 - Servicios de tránsito aéreo para la navegación aérea o servicios que se pueden utilizar para soportar la operación.
SISTEMA DE MONITOREO ATS Si una observación/ análisis indica que una pérdida de franqueamiento de obstáculos ha ocurrido, la razón de la aparente desviación de la trayectoria o de la altitud debe ser determinado y las medidas adoptadas para prevenir una recurrencia.
ESPECIFICACIÓN DE NAVIGACIÓN
Antecedentes Esta sección identifica los requisitos de aeronavegabilidad y operacional para las operaciones RNP APCH. El cumplimiento operativo de estos requisitos debe ser abordado a través de reglamentos operativos nacionales, y, en algunos casos, podrá requerir una autorización operacional. Por ejemplo, ciertas regulaciones operacionales requieren que los explotadores apliquen su autoridad nacional (Estado de Registro) para la aprobación operacional. En este capítulo se aborda sólo la parte del sistema de navegación lateral. Si el sistema está aprobado para una operación APV Baro VNAV, la instalación debe ser compatible con los requisitos del anexo A " VNAV barométrica”.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-5
PROCESO DE APROBACIÓN
Esta especificación de navegación no constituye en sí misma orientación de reglamentación contra el cual los aeronave o el operador será evaluado y aprobado. Las aeronaves son certificadas por el Estado del fabricante. Los operadores son aprobados de conformidad con las normas de funcionamiento nacionales. La especificación de navegación proporciona la técnica y los criterios operativos, y no implica la necesidad de re certificación. Los siguientes pasos deben ser completados antes de la realización de operaciones RNP APCH:
a) la elegibilidad de equipos de a bordo deberá ser determinado y documentado;
b) los procedimientos operativos para el sistema de navegación a ser usados y los procesos de base de datos de navegación del operador debe estar debidamente documentado;
c) El entrenamiento de la tripulación de vuelo sobre la base de los procedimientos operativos deben estar documentados si es necesario;
d) el anterior material deberá ser aceptado por la autoridad reguladora del Estado, y
e) la aprobación operacional deben ser obtenidos de conformidad con las normas de funcionamiento.
Tras la finalización con éxito de los pasos anteriores, una aprobación operacional RNP APCH, Carta de Autorización (LOA) o la especificación de operaciones adecuada (Especificaciones de Operaciones), si es requerido, deberá ser expedido por el Estado. Elegibilidad de Aeronaves Documentos de elegibilidad de aeronavegabilidad. Documentación pertinente aceptable para el Estado del operador/registro debe estar disponible con el fin de establecer que la aeronave está equipada con un sistema RNAV que reúna los requisitos RNP APCH. Para evitar la actividad normativa innecesaria, la determinación de elegibilidad para los sistemas existentes debería considerar la posibilidad de aceptación de la documentación del fabricante de cumplimiento, por ejemplo, como con la EASA AMC 20 series. Sistemas RNP AR APCH son consideradas como cualificadas para las operaciones RNP APCH sin más exámenes. Aprobación Operacional La evaluación de un operador en particular se hecha por el Estado del operador/Registro para ese operador y de conformidad con las normas operacionales nacionales (por ejemplo, los JAR-OPS 1, 14 CFR Parte 121) soportada a través de asesoramiento apropiado y material de orientación. La evaluación debería tener en cuenta:
a) pruebas de elegibilidad de las aeronaves;
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-6
b) la evaluación de los procedimientos operativos para los sistemas de navegación que se utilice;
c) el control de estos procedimientos aceptables a través de entradas en el manual de operaciones;
d) la identificación de los requisitos y de entrenamiento de la tripulación de vuelo,
e) en caso necesario, el control de los procesos de las base de datos de navegación.
La aprobación operacional será probablemente documentada a través del Estado que aprueba la especificación de la operación asociada con el certificado de operador aéreo (AOC) de la cuestión a través de una carta de autorización (LOA), la especificación de operaciones adecuada (especificaciones de Operaciones) o enmienda al manual de operaciones. Descripción del equipo de la aeronave El operador deberá disponer de una lista de configuración que detalle los componentes y los equipos pertinentes que se utilizarán para la operación RNP APCH. Documentación de Entrenamiento Los operadores comerciales deben tener un programa de entrenamiento donde aborden las prácticas operacionales, procedimientos y temas de entrenamiento relacionados con las operaciones RNP APCH (por ejemplo inicial, actualización o entrenamiento periódico para la tripulación de vuelo, despachadores o personal de mantenimiento Nota.- No es necesario establecer un programa de formación por separado o en régimen si el entrenamiento RNAV es ya un elemento integrado de un programa de formación. Sin embargo, debería ser posible identificar los aspectos del RNAV que son cubiertos dentro de un programa de formación. Los operadores privados deben estar familiarizados con las prácticas y procedimientos identificados en “conocimiento del piloto y entrenamiento”. Operaciones manuales y listas de chequeo Operaciones manuales y listas de chequeo para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos operativos normalizados detallados en “Procedimientos Operacionales”. Los manuales deben contener apropiadas instrucciones operacionales de navegación y procedimientos de contingencia, si se especifica. Los manuales y listas de chequeo deben ser sometidas a examen como parte del proceso de aplicación. Los operadores privados deben operar utilizando las prácticas y procedimientos identificados en “Conocimiento del piloto y el Entrenamiento”.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-7
Consideraciones, Lista de Equipo Mínimo (MEL) Los operadores deben ajustar la MEL, o equivalente, y especificar las condiciones de ejecución. Cualquier revisión MEL necesarias para hacer frente a las disposiciones RNP APCH debe ser aprobada
REQUISITOS DE AERONAVES
El sistema de vigilancia del rendimiento y alerta Precisión: Durante las operaciones en el segmento inicial e intermedio y para la aproximación frustrada RNAV, de una RNP APCH, el error total lateral del sistema debe estar dentro de ± 1 NM al menos el 95 por ciento del total de tiempo de vuelo. El error a lo largo de la trayectoria también debe estar dentro de ± 1 NM al menos el 95 por ciento del total de tiempo de vuelo. Durante las operaciones en el segmento de aproximación final de un procedimiento RNP APCH, el error lateral total del sistema de debe estar dentro de ± 0,3 NM al menos el 95 por ciento del total de tiempo de vuelo. El error a lo largo de la trayectoria también debe estar dentro de ± 0,3 NM al menos el 95 por ciento del total de tiempo de vuelo. Para satisfacer el requisito de exactitud, el 95 por ciento del tiempo el FTE no debe de exceder del 0,5 NM sobre el segmento inicial e intermedio, y para la aproximación frustrada de un procedimiento RNAV RNP APCH. El FTE no debe exceder de 0,25 NM el 95 por ciento del tiempo en el segmento de aproximación final de un RNP APCH. Nota.- La utilización de un indicador de desviación lateral con una deflexión de escala de 1 MN en el segmento inicial e intermedio, y para la aproximación frustrada RNAV y 0,3 NM para una deflexión de escala en el segmento de aproximación final, ha resultado ser un medio aceptable de cumplimiento. El uso de un piloto automático o director de vuelo ha resultado ser un medio aceptable de cumplimiento (sistemas de estabilización no califican). Integridad: El mal funcionamiento del equipo de navegación de la aeronave está clasificado como una gran falla en virtud de las condiciones reglamentarias de aeronavegabilidad (es decir, 10-5 por hora). Continuidad: La pérdida de la función está clasificada como una condición de fallo menor si el operador puede revertir a otro sistema de navegación diferente y proceder a un aeropuerto adecuado. Si el procedimiento de aproximación frustrada se basa en medios convencionales (por ejemplo, NDB, VOR, DME), relacionados con el equipo de navegación debe estar instalado y estar en servicio. La vigilancia del rendimiento y alerta: Durante las operaciones en el segmento inicial e intermedio y para la aproximación frustrada RNAV de un procedimiento RNP APCH, el sistema RNP, o el sistema RNP y el piloto en combinación, deberá presentar una alerta si el requisito de precisión no se cumple, o si la probabilidad de que el TSE lateral
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-8
sea superior a 2 MN es mayor que 10-5. Durante las operaciones en el segmento de aproximación final de un procedimiento RNP APCH, el sistema RNP, o el sistema RNP y el piloto en combinación, deberán proporcionar una alerta si el requisito de precisión no se cumple, o si la probabilidad de que el TSE lateral es superior a 0,6 NM es mayor que 10-5. Señal en el espacio: Durante las operaciones en el segmento inicial e intermedio y para la aproximación frustrada RNAV del procedimiento RNP APCH, el equipo de navegación de la aeronave deberá presentar una alerta si la probabilidad de los errores de señal en el espacio causan un error de posición lateral superior a 2 NM y supera 10-7 por hora (Anexo 10, Volumen I, Tabla 3.7.2.4-1). Durante las operaciones en el segmento de aproximación final de un procedimiento RNP APCH, el equipo de navegación de la aeronave deberá presentar un alerta si la probabilidad de los errores de la señal en el espacio causan un error de posición lateral superior a 0,6 NM y supera 10-7 por hora (Anexo 10, Volumen I, Tabla 3.7.2.4-1). Ver VOL II Capítulo 2 Parte A página 2 de este manual Nota 1.- No hay requisitos RNP APCH para la aproximación frustrada si se basa en medios convencionales (VOR, DME, NDB) o sobre tramos a estima. Nota 2.- El cumplimiento de la vigilancia de la performance y alerta requisito que no implica monitoreo automático de un error técnico de vuelo. La función de la vigilancia y alerta a bordo debería consistir, al menos, de un algoritmo de vigilancia y alerta del error del sistema de navegación (NSE) y de la pantalla de desviación lateral que permita a la tripulación controlar el error técnico de vuelo (FTE). En la medida que los procedimientos operativos se utilizan para vigilar el FTE, los procedimientos de la tripulación, características de equipos e instalación son evaluados por su eficacia y equivalencia, tal como se describe en los requisitos y procedimientos operativos. El error de definición de la trayectoria (PDE) se considera insignificante, debido al proceso de garantía de la calidad (“Base de Datos de Navegación”) y los procedimientos de la tripulación (“Procedimientos Operativos”). Nota 3.- Los siguientes sistemas cumplen la exactitud, la integridad y la continuidad de los requisitos de estos criterios:
a) sistemas GNSS autónomos, el equipo debe ser aprobado de conformidad con el TSO-C129a / ETSO-C129a Clase A1 o E/TSO-C146 clase Gamma y operacional clase 1, 2 o 3;
b) los sensores GNSS utilizados en sistemas de sensores múltiples (por ejemplo, FMS) equipo debe ser aprobado de conformidad con la TSO C129 / ETSO C129 de clase B1, C1, B3, C3 o E/TSO C145 clase 1, 2 o 3. Para receptor GNSS aprobado de conformidad con E/TSO-C129, la capacidad para la detección y la exclusión de fallos de satélite (FDE), es recomendada para mejorar la función de la continuidad y
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-9
c) Los sistemas de sensores múltiples que utilizan el GNSS debería ser aprobados de acuerdo con la AC20-130A o TSO C115b, así como se ha demostrado la capacidad para procedimientos RNP APCH.
Criterios específicos para los sistemas de navegación Los procedimientos RNP APCH se basan en el posicionamiento GNSS. Los datos de posicionamiento de otros tipos de sensores de navegación pueden ser integrados con el GNSS, siempre que los datos de los otros sistemas de posicionamiento no causen errores de posición superiores al error total del sistema (TSE) presupuestado, o si se proporcionan los medios para deseleccionar los otros tipos de sensores de navegación. Requisitos Funcionales Pantallas de navegación y las funciones requeridas Los datos de navegación, incluyendo una indicación TO/FROM, y una indicación de falla, debe ser mostrada en la pantalla de desviación lateral (CDI, (E) HSI) y/o una pantalla de mapas de navegación. Estos deben ser utilizados como instrumentos principales de vuelo para la navegación de la aeronave, para maniobra de anticipación y para indicación de falla/estado/integridad:
a) la pantalla debe estar visible para el piloto y ubicada en el campo de visión principal (± 15 grados de la línea normal de vista del puesto de pilotaje) cuando se mira hacia adelante a lo largo de la trayectoria de vuelo;
b) la escala de la pantalla de desviación lateral debe ponerse de acuerdo con cualquier límite de anuncio y alertar;
c) la pantalla de desviación lateral debe tener una deflexión de escala adecuada para la actual fase de vuelo y debe estar basada en el requisito del error total del sistema (TSE). La escala es de ± 1 NM para el segmento inicial e intermedio y ± 0,3 NM para el segmento final;
d) la escala de la pantalla se puede configurar automáticamente por defecto lógico o establecerse en un valor obtenido a partir de una base de datos de navegación. El valor de la deflexión total de la escala debe ser conocida o deben estar disponible en la pantalla para el piloto acorde con los valores de la aproximación;
e) como un medio alterno, una pantalla de mapas de navegación debe dar una funcionalidad equivalente a una pantalla de desviación lateral con las escalas correspondientes de mapas (la escala puede fijarse manualmente por el piloto). Para ser aprobado, la pantalla de mapas de navegación debe ser mostrada para satisfacer los requisitos de TSE;
f) es altamente recomendable que el selector de cursos de la pantalla de desviación es automáticamente esclavizada a la trayectoria calculada RNAV;
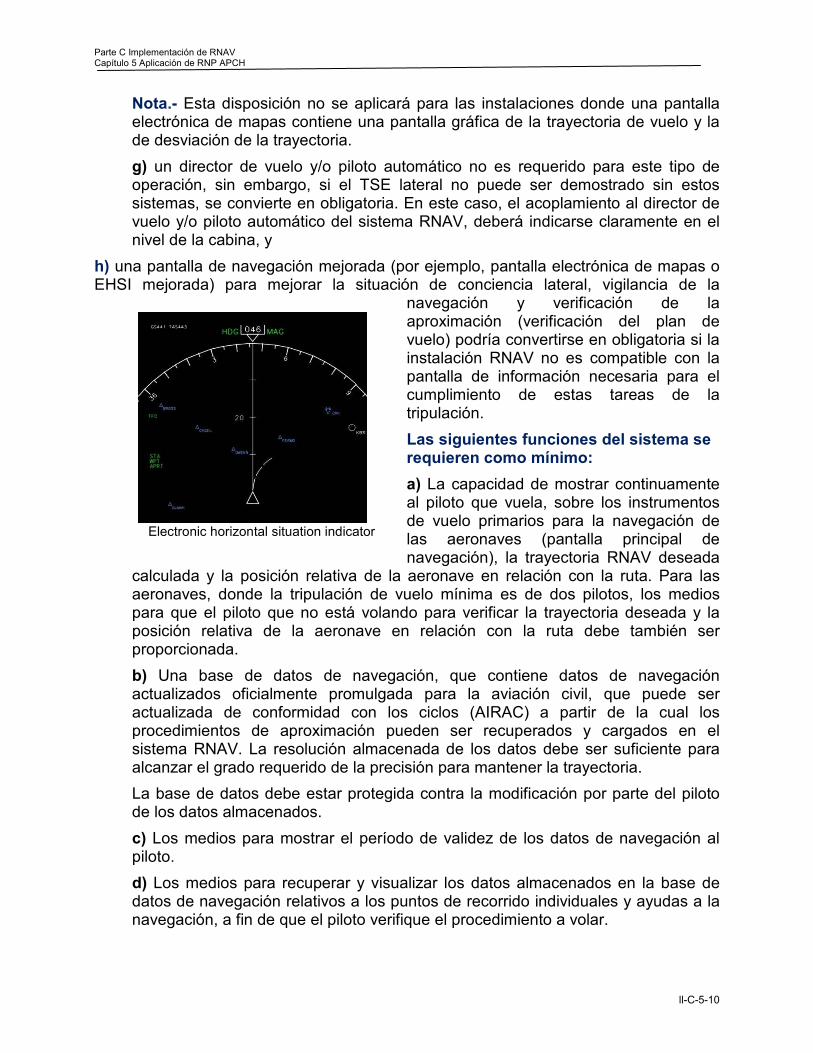
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-10
Nota.- Esta disposición no se aplicará para las instalaciones donde una pantalla electrónica de mapas contiene una pantalla gráfica de la trayectoria de vuelo y la de desviación de la trayectoria.
g) un director de vuelo y/o piloto automático no es requerido para este tipo de operación, sin embargo, si el TSE lateral no puede ser demostrado sin estos sistemas, se convierte en obligatoria. En este caso, el acoplamiento al director de vuelo y/o piloto automático del sistema RNAV, deberá indicarse claramente en el nivel de la cabina, y
h) una pantalla de navegación mejorada (por ejemplo, pantalla electrónica de mapas o EHSI mejorada) para mejorar la situación de conciencia lateral, vigilancia de la
navegación y verificación de la aproximación (verificación del plan de vuelo) podría convertirse en obligatoria si la instalación RNAV no es compatible con la pantalla de información necesaria para el cumplimiento de estas tareas de la tripulación.
Las siguientes funciones del sistema se requieren como mínimo:
a) La capacidad de mostrar continuamente al piloto que vuela, sobre los instrumentos de vuelo primarios para la navegación de las aeronaves (pantalla principal de navegación), la trayectoria RNAV deseada
calculada y la posición relativa de la aeronave en relación con la ruta. Para las aeronaves, donde la tripulación de vuelo mínima es de dos pilotos, los medios para que el piloto que no está volando para verificar la trayectoria deseada y la posición relativa de la aeronave en relación con la ruta debe también ser proporcionada.
b) Una base de datos de navegación, que contiene datos de navegación actualizados oficialmente promulgada para la aviación civil, que puede ser actualizada de conformidad con los ciclos (AIRAC) a partir de la cual los procedimientos de aproximación pueden ser recuperados y cargados en el sistema RNAV. La resolución almacenada de los datos debe ser suficiente para alcanzar el grado requerido de la precisión para mantener la trayectoria.
La base de datos debe estar protegida contra la modificación por parte del piloto de los datos almacenados.
c) Los medios para mostrar el período de validez de los datos de navegación al piloto.
d) Los medios para recuperar y visualizar los datos almacenados en la base de datos de navegación relativos a los puntos de recorrido individuales y ayudas a la navegación, a fin de que el piloto verifique el procedimiento a volar.
Electronic horizontal situation indicator
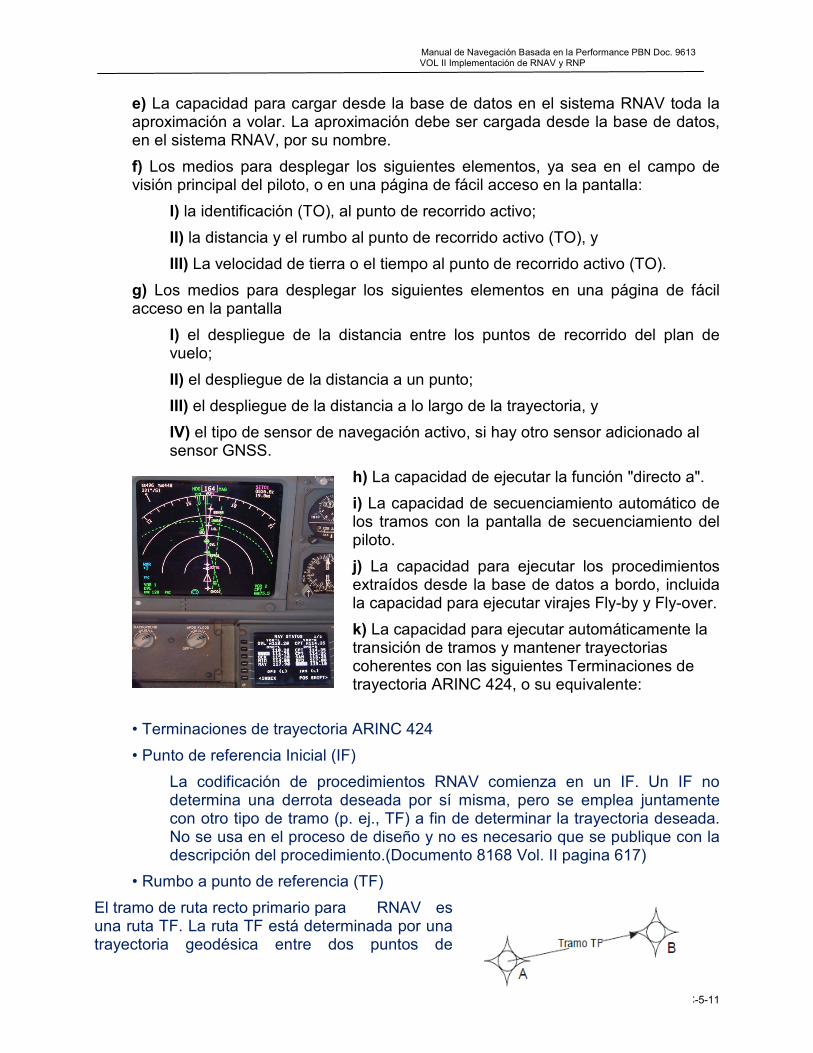
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-11
e) La capacidad para cargar desde la base de datos en el sistema RNAV toda la aproximación a volar. La aproximación debe ser cargada desde la base de datos, en el sistema RNAV, por su nombre.
f) Los medios para desplegar los siguientes elementos, ya sea en el campo de visión principal del piloto, o en una página de fácil acceso en la pantalla:
I) la identificación (TO), al punto de recorrido activo;
II) la distancia y el rumbo al punto de recorrido activo (TO), y
III) La velocidad de tierra o el tiempo al punto de recorrido activo (TO).
g) Los medios para desplegar los siguientes elementos en una página de fácil acceso en la pantalla
I) el despliegue de la distancia entre los puntos de recorrido del plan de vuelo;
II) el despliegue de la distancia a un punto;
III) el despliegue de la distancia a lo largo de la trayectoria, y
IV) el tipo de sensor de navegación activo, si hay otro sensor adicionado al sensor GNSS.
h) La capacidad de ejecutar la función "directo a".
i) La capacidad de secuenciamiento automático de los tramos con la pantalla de secuenciamiento del piloto.
j) La capacidad para ejecutar los procedimientos extraídos desde la base de datos a bordo, incluida la capacidad para ejecutar virajes Fly-by y Fly-over.
k) La capacidad para ejecutar automáticamente la transición de tramos y mantener trayectorias coherentes con las siguientes Terminaciones de trayectoria ARINC 424, o su equivalente:
• Terminaciones de trayectoria ARINC 424
• Punto de referencia Inicial (IF)
La codificación de procedimientos RNAV comienza en un IF. Un IF no determina una derrota deseada por sí misma, pero se emplea juntamente con otro tipo de tramo (p. ej., TF) a fin de determinar la trayectoria deseada. No se usa en el proceso de diseño y no es necesario que se publique con la descripción del procedimiento.(Documento 8168 Vol. II pagina 617)
• Rumbo a punto de referencia (TF)
El tramo de ruta recto primario para RNAV es una ruta TF. La ruta TF está determinada por una trayectoria geodésica entre dos puntos de
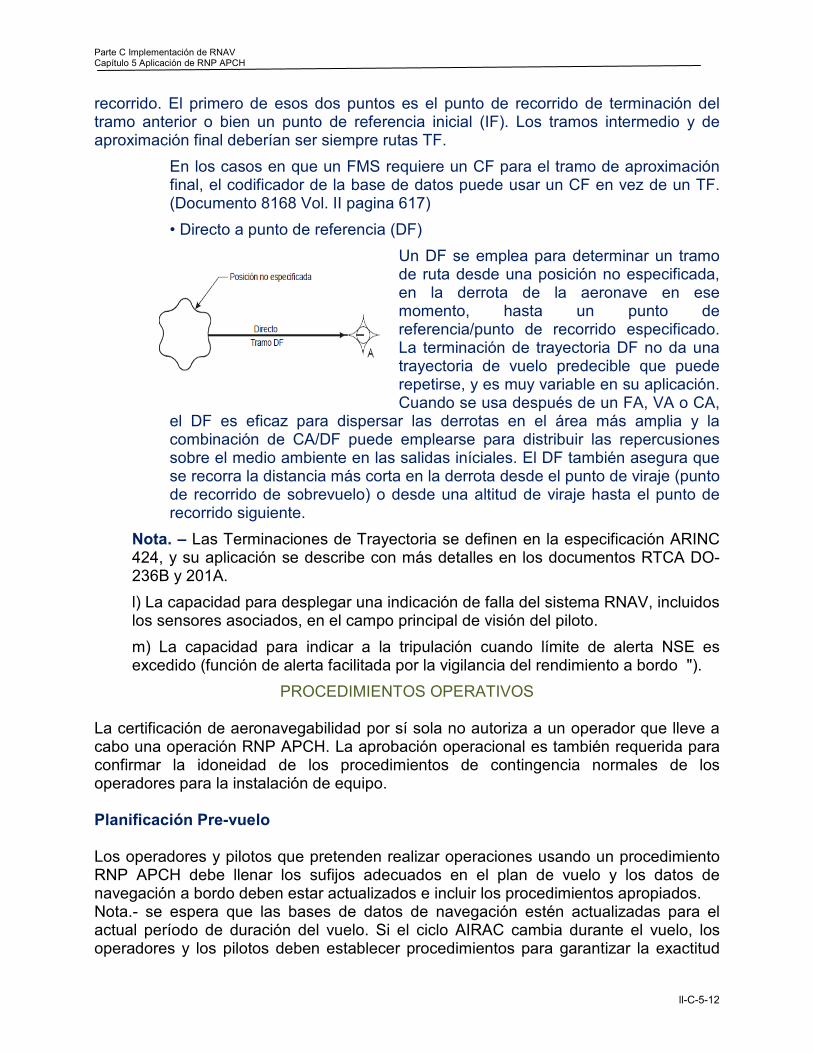
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-12
recorrido. El primero de esos dos puntos es el punto de recorrido de terminación del tramo anterior o bien un punto de referencia inicial (IF). Los tramos intermedio y de aproximación final deberían ser siempre rutas TF.
En los casos en que un FMS requiere un CF para el tramo de aproximación final, el codificador de la base de datos puede usar un CF en vez de un TF. (Documento 8168 Vol. II pagina 617)
• Directo a punto de referencia (DF)
Un DF se emplea para determinar un tramo de ruta desde una posición no especificada, en la derrota de la aeronave en ese momento, hasta un punto de referencia/punto de recorrido especificado. La terminación de trayectoria DF no da una trayectoria de vuelo predecible que puede repetirse, y es muy variable en su aplicación. Cuando se usa después de un FA, VA o CA,
el DF es eficaz para dispersar las derrotas en el área más amplia y la combinación de CA/DF puede emplearse para distribuir las repercusiones sobre el medio ambiente en las salidas iníciales. El DF también asegura que se recorra la distancia más corta en la derrota desde el punto de viraje (punto de recorrido de sobrevuelo) o desde una altitud de viraje hasta el punto de recorrido siguiente.
Nota. – Las Terminaciones de Trayectoria se definen en la especificación ARINC 424, y su aplicación se describe con más detalles en los documentos RTCA DO-236B y 201A.
l) La capacidad para desplegar una indicación de falla del sistema RNAV, incluidos los sensores asociados, en el campo principal de visión del piloto.
m) La capacidad para indicar a la tripulación cuando límite de alerta NSE es excedido (función de alerta facilitada por la vigilancia del rendimiento a bordo ").
PROCEDIMIENTOS OPERATIVOS La certificación de aeronavegabilidad por sí sola no autoriza a un operador que lleve a cabo una operación RNP APCH. La aprobación operacional es también requerida para confirmar la idoneidad de los procedimientos de contingencia normales de los operadores para la instalación de equipo. Planificación Pre-vuelo Los operadores y pilotos que pretenden realizar operaciones usando un procedimiento RNP APCH debe llenar los sufijos adecuados en el plan de vuelo y los datos de navegación a bordo deben estar actualizados e incluir los procedimientos apropiados. Nota.- se espera que las bases de datos de navegación estén actualizadas para el actual período de duración del vuelo. Si el ciclo AIRAC cambia durante el vuelo, los operadores y los pilotos deben establecer procedimientos para garantizar la exactitud
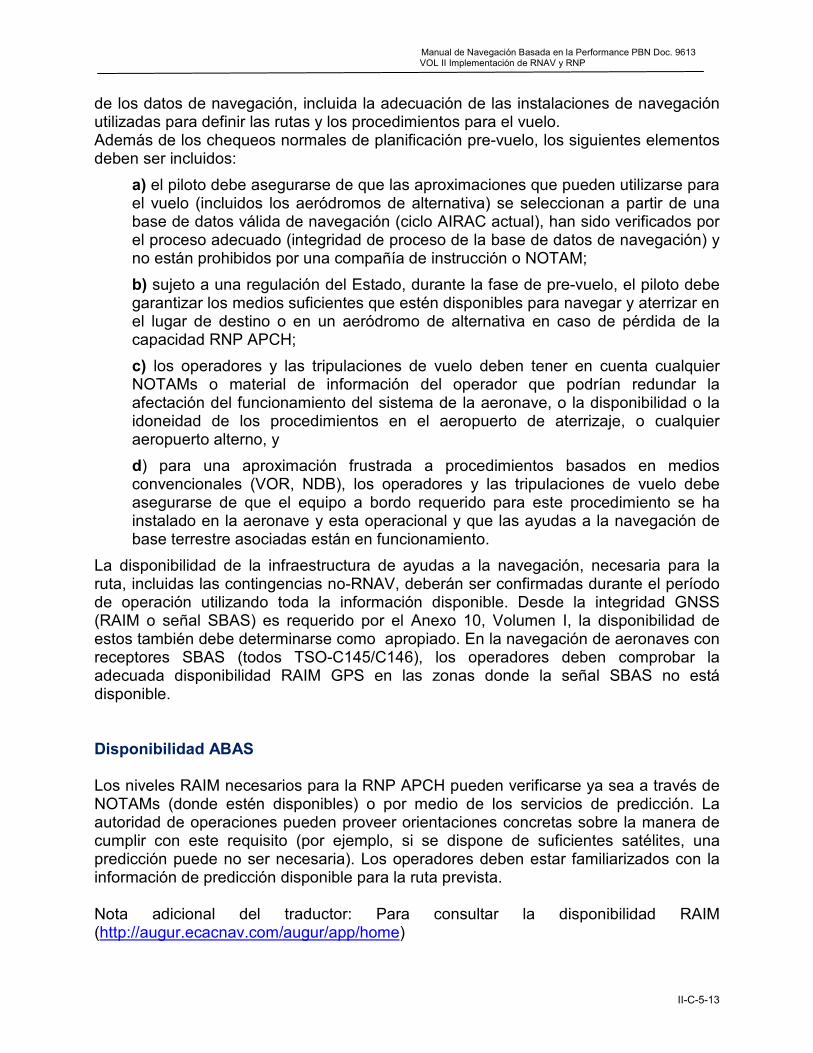
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-13
de los datos de navegación, incluida la adecuación de las instalaciones de navegación utilizadas para definir las rutas y los procedimientos para el vuelo. Además de los chequeos normales de planificación pre-vuelo, los siguientes elementos deben ser incluidos:
a) el piloto debe asegurarse de que las aproximaciones que pueden utilizarse para el vuelo (incluidos los aeródromos de alternativa) se seleccionan a partir de una base de datos válida de navegación (ciclo AIRAC actual), han sido verificados por el proceso adecuado (integridad de proceso de la base de datos de navegación) y no están prohibidos por una compañía de instrucción o NOTAM;
b) sujeto a una regulación del Estado, durante la fase de pre-vuelo, el piloto debe garantizar los medios suficientes que estén disponibles para navegar y aterrizar en el lugar de destino o en un aeródromo de alternativa en caso de pérdida de la capacidad RNP APCH;
c) los operadores y las tripulaciones de vuelo deben tener en cuenta cualquier NOTAMs o material de información del operador que podrían redundar la afectación del funcionamiento del sistema de la aeronave, o la disponibilidad o la idoneidad de los procedimientos en el aeropuerto de aterrizaje, o cualquier aeropuerto alterno, y
d) para una aproximación frustrada a procedimientos basados en medios convencionales (VOR, NDB), los operadores y las tripulaciones de vuelo debe asegurarse de que el equipo a bordo requerido para este procedimiento se ha instalado en la aeronave y esta operacional y que las ayudas a la navegación de base terrestre asociadas están en funcionamiento.
La disponibilidad de la infraestructura de ayudas a la navegación, necesaria para la ruta, incluidas las contingencias no-RNAV, deberán ser confirmadas durante el período de operación utilizando toda la información disponible. Desde la integridad GNSS (RAIM o señal SBAS) es requerido por el Anexo 10, Volumen I, la disponibilidad de estos también debe determinarse como apropiado. En la navegación de aeronaves con receptores SBAS (todos TSO-C145/C146), los operadores deben comprobar la adecuada disponibilidad RAIM GPS en las zonas donde la señal SBAS no está disponible. Disponibilidad ABAS Los niveles RAIM necesarios para la RNP APCH pueden verificarse ya sea a través de NOTAMs (donde estén disponibles) o por medio de los servicios de predicción. La autoridad de operaciones pueden proveer orientaciones concretas sobre la manera de cumplir con este requisito (por ejemplo, si se dispone de suficientes satélites, una predicción puede no ser necesaria). Los operadores deben estar familiarizados con la información de predicción disponible para la ruta prevista. Nota adicional del traductor: Para consultar la disponibilidad RAIM (http://augur.ecacnav.com/augur/app/home)
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-14
La disponibilidad de predicción RAIM debe tener en cuenta los últimos NOTAMs de la constelación GPS (NANUs) y modelo aviónica (si están disponibles). El servicio puede ser proporcionado por la ANSP, fabricante de aviónica, y otras entidades, o a través de la capacidad de predicción RAIM del receptor en el aire. En el caso de que se pronostique una continua pérdida de nivel adecuado de detección de fallos de más de cinco minutos para cualquier parte de la operación RNP APCH, la planificación de los vuelos deben ser revisados (por ejemplo, retrasando la salida o la planificación de un procedimiento de salida diferente). Software de predicción de disponibilidad RAIM no garantiza el servicio, sino que son herramientas para evaluar la capacidad prevista para cumplir con la performance de navegación. Debido a la falla imprevista de algunos elementos GNSS, los pilotos/ ANSP deben darse cuenta de que la navegación RAIM o GPS pueden perderse por completo, mientras que en el aire puede exigir la reversión a un medio alterno de navegación. Por lo tanto, los pilotos deben evaluar su capacidad para navegar (potencialmente a un destino alternativo) en caso de fallo de la navegación GPS. Antes de iniciar el procedimiento Además del procedimiento normal antes de iniciar la aproximación (antes del IAF tramo de llegada) y en compatibilidad con la carga de trabajo de la tripulación, la tripulación de vuelo debe verificar que el procedimiento correcto fue cargado en comparación con la carta de aproximación. Esta comprobación debe incluir:
a) la secuencia de puntos de recorrido, y
b) razonabilidad de las trayectorias y las distancias de los tramos de la aproximación, y la exactitud del curso del tramo de acercamiento y longitud del segmento de aproximación final.
Nota.- Como mínimo, este chequeo puede ser una simple inspección de una pantalla de mapas que se consigan los objetivos de este apartado.
La tripulación debe también mediante la publicación de cartas, la pantalla de mapas o unidad control de visualización (CDU), que puntos de recorrido son "fly-by y fly over”. Para sistemas de sensores múltiples, la tripulación debe verificar, durante la aproximación, que el sensor GNSS es utilizado para el cómputo de la posición. Para un sistema RNP con ABAS requiere altitud barométrica corregida, el actual ajuste barométrico de altímetro de aeropuerto debe ser entrado en el momento oportuno y la ubicación, consistente con el rendimiento de la operación de vuelo. Cuando la operación se basa en la disponibilidad del ABAS, la tripulación de vuelo debe realizar un nuevo Chequeo de disponibilidad RAIM si el ETA es de más de 15 minutos diferente de la ETA utilizada durante la planificación pre-vuelo. Esta verificación es también procesada automáticamente 2 NM antes del FAF para un receptor E/TSO-C129a clase A1.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-15
Intervenciones del ATC táctico en el área terminal pueden incluir rumbos radar, "directo a" autorizaciones libres que eluden los tramos iníciales de una aproximación, la interceptación de un segmento inicial o intermedio de nivel de una aproximación, o la inserción de puntos de recorrido cargados de la base de datos. En cumplimiento de instrucciones ATC, la tripulación de vuelo deben ser conscientes de las implicaciones para el sistema de RNP:
a) la introducción manual de coordenadas en el sistema RNAV por la tripulación de vuelo para operar en el área terminal No se permite, y
b) autorizaciones "directo a" podrán ser aceptadas para el intermedio (IF), siempre que el resultado de cambio en la trayectoria el IF no supere los 45 grados.
Nota.- autorizaciones "directo a" para FAF no es aceptable.
La definición lateral de una trayectoria de vuelo entre el FAF y el punto de aproximación frustrada (MAPt) no debe ser revisada por la tripulación de vuelo bajo cualquier circunstancia. Durante el procedimiento La aeronave deberá estar establecida en el curso de aproximación final a más tardar en el FAF antes de iniciar el descenso (para asegurar el franqueamiento de los obstáculos y el terreno). La tripulación debe verificar el modo anunciador de la aproximación (o equivalente) es indicando correctamente el modo de integridad de la aproximación dentro de 2 NM antes de la FAF. Nota.- Esta no será de aplicación para determinados sistemas de RNP (por ejemplo, las aeronaves ya aprobadas con capacidad demostrada RNP). Para tales sistemas, se dispone de otro medio, incluidos los pantallas electrónicas de mapas, indicaciones de modo de guiado de vuelo, etc., que indican claramente a la tripulación de que el modo de aproximación esta activado. La pantalla adecuada debe ser seleccionada a fin de que la siguiente información pueda ser monitoreada:
a) trayectoria deseado RNAV calculada (DTK), y
b) la posición relativa de la aeronave en relación con la ruta (desviación
perpendicular a la derrota) para el monitoreo vigilancia FTE.
El procedimiento debe ser interrumpido:
a) si la pantalla de navegación muestra la banderola no válida, o
b) en caso de pérdida de la función de la integridad y alerta, o
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-16
c) si la función de la integridad y alertar es anunciada y no está disponible antes
de la FAF, o
Nota.- la interrupción del procedimiento puede que no sea necesaria para un sistema multi-sensor RNP que incluye la capacidad demostrada RNP sin GNSS. La documentación del fabricante debe ser examinada para determinar la medida en que puede ser utilizado el sistema en tal configuración.
d) si el FTE es excesivo.
La aproximación frustrada deberá ser volada de conformidad con el procedimiento publicado. Uso de los sistemas RNAV durante la aproximación frustrada es aceptable, siempre que:
a) el sistema RNAV está en funcionamiento (por ejemplo, no hay pérdida de la función, no hay alerta NSE, no hay indicación de fallo), y
b) el procedimiento en su conjunto (incluyendo la aproximación frustrada) es cargada desde la base de datos de navegación.
Durante el procedimiento RNP APCH, los pilotos deben utilizar un indicador de desviación lateral, director de vuelo y/o piloto automático en modo de navegación lateral. Pilotos de aeronaves con un indicador de la desviación lateral (por ejemplo, CDI) debe asegurarse de que la escala del indicador de desviación lateral (la deflexión totalidad de la escala) es adecuado para la precisión de la navegación asociadas a los diferentes segmentos del procedimiento (es decir, ± 1,0 NM para el segmento inicial e intermedio, ± 0,3 NM para el segmento de aproximación final, y de ± 1,0 NM para el segmento de aproximación frustrada). Se espera que todos los pilotos mantengan el eje central del procedimiento, como se demuestra a bordo por el indicador de desviación lateral y/o guiado de vuelo durante todo el procedimiento de aproximación, a menos que sea autorizado para desviarse por el ATC o en condiciones de emergencia. Para las operaciones normales, el error perpendicular a la derrota/desviación (la diferencia entre la trayectoria calculada del sistema RNAV y la posición relativa de la aeronave en relación con la ruta) debe limitarse a ± ½ de la precisión de la navegación asociada con el procedimiento (es decir, 0,5 NM para el segmento inicial e intermedio, 0,15 NM para el segmento de aproximación final, y 0,5 NM para el segmento de aproximación frustrada). Breves desviaciones de esta norma (por ejemplo, overshoots o undershoots) durante e inmediatamente después de los virajes, hasta un máximo de una vez la precisión de la navegación (es decir, 1,0 NM para el segmento inicial e intermedio), son admisibles. Cuando se utiliza ayuda barométrica VNAV para la orientación vertical de la trayectoria durante el segmento de aproximación final, desviaciones por encima y por debajo de la trayectoria barométrica VNAV no debe exceder de (100 pies /- 50 pies), respectivamente.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-17
Los pilotos deben realizar una aproximación frustrada si la desviación lateral o desviación vertical, si se proporciona, superior a criterios anteriores, a menos que el piloto tenga a la vista la referencia visual necesaria para continuar la aproximación. Procedimientos generales de funcionamiento Los operadores y los pilotos no deberán solicitar un procedimiento RNP APCH a menos que se cumplan todos los criterios en los documentos del Estado. Si una aeronave que no se ajusten a estos criterios recibe una autorización del ATC para llevar a cabo un procedimiento RNP APCH, el piloto deberá informar al ATC que él y la aeronave es incapaz de aceptar la autorización y debe solicitar una instrucción de alternativa. El piloto debe cumplir con cualquier instrucción o procedimiento señalado por el fabricante, según sea necesario para cumplir con los requisitos de desempeño en este capítulo. Mientras se está operando en segmentos RNAV, los pilotos se les animan a utilizar el director de vuelo y/o piloto automático en el modo de navegación lateral, si está disponible Procedimientos de contingencia El piloto debe notificar al ATC de cualquier pérdida de la capacidad RNP APCH, junto con el curso de acción propuesto. Si no puede cumplir con los requisitos de un procedimiento RNP APCH, los pilotos deben avisar al ATS, tan pronto como sea posible. La pérdida de capacidad RNP APCH incluye cualquier fallo o hecho causante que la aeronave ya no cumplen los requisitos del procedimiento RNP APCH. El operador debe desarrollar procedimientos de contingencia con el fin de reaccionar con seguridad a raíz de la pérdida de la capacidad RNP APCH durante la aproximación. En el caso de fallo de las comunicaciones, la tripulación de vuelo debe continuar con el procedimiento RNP APCH de conformidad con el procedimiento de pérdida de comunicaciones publicado.
CONOCIMIENTO DEL PILOTO Y ENTRENAMIENTO El programa de formación debe proporcionar un suficiente entrenamiento (por ejemplo, simulador, dispositivo de entrenamiento, o la aeronave) en aeronaves con sistema RNAV en la medida en que los pilotos no sólo tareas orientadas, esto incluye:
a) la información en este capítulo;
b) el significado y el uso adecuado de los sistemas RNP;
c) las características que determine el procedimiento representado en la carta y la descripción textual;
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-18
d) descripción de los conocimientos relativos a los tipos de puntos de recorrido (fly-over y fly-by), terminación de trayectorias requeridas (IF, TF, DF) y cualquier otro tipo utilizados por el operador, así como trayectorias de vuelo asociados con las aeronaves;
e) los conocimientos sobre el equipo de navegación requerido con el fin de llevar a cabo operaciones RNP APCH (por lo menos un sistema RNP basado en GNSS);
f) el conocimiento de información específica de sistemas RNP:
I) los niveles de automatización, modo de anuncios, cambios, alertas, interacciones, reversiones, y la degradación;
II) la integración funcional con otros sistemas de la aeronave;
III) el significado y propiedades de las discontinuidades de ruta, así como los procedimientos relacionados con la tripulación de vuelo;
IV) los procedimientos de vigilancia para cada fase de vuelo;
V) los tipos de sensores de navegación utilizados por el sistema RNP y sistemas asociados con la priorización/ponderación/lógica;
VI) anticipación de virajes en consideración a los efectos de la velocidad y altitud, y
VII) la interpretación de pantallas electrónicas y los símbolos;
g) conocimiento de los procedimientos operacionales del equipo RNAV, según proceda, incluida la forma de realizar las siguientes acciones:
I) verificar los datos actualizados de navegación de la aeronave;
II) verificar la finalización con éxito de las auto-pruebas del sistema RNP;
III) inicializar el sistema RNP y posición;
IV) recuperar y volar un RNP APCH;
V) adherirse a las limitaciones de velocidad y/o altitud asociadas con un procedimiento de aproximación;
VI) volar una interceptación de un segmento inicial o intermedio de una aproximación siguiendo la notificación al ATC;
VII) verificar los puntos de recorrido y programación del plan de vuelo;
VIII) volar directo a un punto de recorrido;
IX) determinar la desviación del error perpendicular a la derrota;
X), insertar y borrar la discontinuidad de ruta;
XI) cuando sea requerido por la autoridad aeronáutica del Estado, comprobar el error enorme de navegación usando ayudas a la navegación convencionales, y
XII) el cambio de aeropuerto de llegada y aeropuerto de alternativa;
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-5-19
h) el conocimiento de los niveles recomendados del operador para la fase de automatización de vuelo y la carga de trabajo, incluidos los métodos para minimizar el error perpendicular a la trayectoria para mantener el eje central del procedimiento;
i) el conocimiento de la fraseología radio telefónica para las aplicaciones RNP, y
j) capacidad de llevar a cabo procedimientos de contingencia después de los fallos del sistema RNP.
BASES DE DATOS DE NAVEGACIÓN
La base de datos de navegación se debe obtener de un proveedor que cumpla con RTCA DO 200A/EUROCAE documento ED 76, Normas para procesamiento de datos aeronáuticos. Una carta de aceptación (LOA) expedida por la autoridad reguladora demostrando el cumplimiento de este requisito (por ejemplo, LOA de la FAA expedida de conformidad con la FAA AC 20-153 o EASA LOA expedida de conformidad con la EASA IR 21 sub parte G). Discrepancias que invalidan un procedimiento deben ser reportados al proveedor de base de datos de navegación y el procedimiento afectado deben ser prohibido por el operador dando aviso a su tripulación de vuelo. Los explotadores de aeronaves deben considerar la necesidad de realizar controles en curso de la operatividad de las bases de datos de navegación a fin de satisfacer los requisitos del sistema de calidad.
SUPERVISIÓN DE LOS OPERADORES
Una autoridad reguladora podrá considerar cualquier informe de error de navegación y determinar una medida correctiva para evitar su recurrencia. Repetidas ocurrencias de errores de navegación son atribuidas a una pieza del equipo de navegación y puede resultar en la anulación de la aprobación para la utilización de dicho equipo. Información que indica el potencial de repetir los errores pueden requerir una modificación del programa de formación del operador. La información que se atribuye a múltiples errores de un piloto de la tripulación puede requerir correctivas en el entrenamiento o revisión de la licencia.
Parte C Implementación de RNAV Capítulo 5 Aplicación de RNP APCH
ll-C-5-20
REFERENCIAS
Copias de documentos de EUROCONTROL pueden ser solicitadas a EUROCONTROL, Centro de Documentación, GS4, Rue de la Fusee, 96, B-1130 Bruselas, Bélgica; (Fax: 32 2 729 9109). Sitio web: http://www.ecacnav.com Copias de documentos de EUROCAE pueden ser compradas a EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia (Fax: +33 1 46 55 62 65). Sitio web: www.eurocae.eu Copias de documentos de la FAA pueden ser obtenidas a partir de Superintendente de Documentos, gobierno Printing Office, Washington, DC 20402-9325, EE.UU.. Sitio web: http://www.faa.gov/aircraft_cert/ (regulación Biblioteca y Orientación) Copias de los documentos RTCA pueden ser obtenidas de RTCA Inc., 1140 Connecticut Avenue, NW, Suite 1020, Washington, DC 20036-4001, EE.UU., (Te.l: 1 202 833 9339). Sitio web: www.rtca.org Copias de los documentos ARINC pueden ser obtenidas de Aeronautical Radio, Inc., 2551 Riva Road, Annapolis, Maryland 24101-7465, EE.UU.. Sitio web: http://www.arinc.com Copias de documentos JAA JAA están disponibles en el editor de Information Handling Services (IHS). Información sobre los precios, dónde y cómo realizar un pedido, está disponible en el sitio web de las JAA: http://www.jaa.nl y en el IHS sitios web: http://www.global.his.com y http://www.avdataworks.com Copias de documentos de la AESA puede obtenerse de la AESA (Agencia Europea de Seguridad Aérea), 101253, D-50452 Koln, Alemania. Copias de los documentos de la OACI pueden ser compradas a la Organización de Aviación Civil Internacional, Servicios al Cliente Unidad, 999 University Street, Montreal, Quebec, Canadá H3C 5H7 (Fax: 1 514 954 6769 o por e-mail: [email protected]) oa través de agentes de venta que figuran en el sitio web de la OACI: www.icao.int
II-C-6-1
CAPÍTULO 6
APLICACIÓN RNP AR APCH
INTRODUCCIÓN
ANTECEDENTES La Administración Federal de Aviación (FAA) ha publicado directrices para la aprobación de procedimientos RNP para procedimientos aeronaves especiales y autorización requerida para la tripulación, el 15 de diciembre de 2005 a través de la AC 90-101. Aproximaciones RNP con autorización requerida (RNP AR APCH) representa la versión de la OACI a las operaciones RNP FAA aeronaves especiales y autorización a las tripulaciones requerida (SAAAR). La Agencia Europea de Seguridad Aérea (EASA) está desarrollando directrices equivalentes.
PROPÓSITO
Este capítulo ofrece una recomendación de la OACI y un método de cumplimiento con los requisitos de procedimientos de aproximación por instrumentos (IAP) RNP AR APCH. En este capítulo se abordan las cuestiones operacionales y de aeronavegabilidad. No se ocupa de todos los requisitos que pueden ser especificados para las operaciones en un procedimiento. Estos requisitos se especifican en otros documentos, como normas de funcionamiento, publicaciones de información aeronáutica (AIP) y los Procedimientos suplementarios regionales (Doc. 7030). Mientras una aprobación operacional se refiere principalmente a los requisitos de navegación del espacio aéreo, los operadores y la tripulación de vuelo son todavía requeridos para tener en cuenta todos los documentos operativos relacionados con el espacio aéreo, mientras son requeridos por la autoridad apropiada de la autoridad del Estado, antes de realizar vuelos en ese espacio aéreo.
CONSIDERACIONES DEL ANSP
Consideraciones de la Infraestructura de las ayudas a la navegación
Los procedimientos RNP AR APCHs sólo estarán autorizados en base al GNSS como infraestructura principal de ayudas a la navegación. El uso del DME/DME como una capacidad reversible puede ser autorizada para operadores individuales donde la infraestructura soporta el rendimiento requerido. Los procedimientos RNP AR APCH no
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-2
serán utilizados en las áreas donde existan interferencias de la señal de navegación (GNSS). Nota.- La mayoría de sistemas modernos RNAV priorizan la entrada desde el GNSS y, a continuación el posicionamiento DME/DME. Aunque el posicionamiento VOR/DME se realiza generalmente dentro de un equipo de gestión de vuelo (FMC) cuando los criterios de posicionamiento DME/DME no existe, la variabilidad de aviónica e infraestructura plantea graves desafíos a la normalización.
CONSIDERACIONES COMUNICACIONES Y VIGILANCIA ATS
Los procedimientos RNP AR APCHs no requieren de una única comunicación o consideraciones de vigilancia ATS.
FRANQUEAMIENTO DE OBSTÁCULOS Y ESPACIAMIENTO EN RUTA
Orientación para el diseño de procedimientos de aproximación RNP AR se presenta en el Manual de diseño de Procedimientos (Doc. 9905). Datos de obstáculos y del terreno en las proximidades de la aproximación debe ser publicadas de conformidad con el Anexo 15 - Servicios de información aeronáutica. El franqueamiento de obstáculos debe ser garantizada de acuerdo con el Manual de diseño de Procedimientos (Doc. 9905). De la OACI, Una evaluación de la seguridad debe llevarse a cabo para determinar el espaciamiento de la ruta.
CONSIDERACIONES ADICIONALES La orientación en este capítulo no sustituye las necesidades de funcionamiento del Estado de equipo. La configuración actual de la presión local debe ser siempre proporcionada para soportar los procedimientos RNP AR APCHs, cuando la aeronave ha logrado la trayectoria vertical que depende de esa configuración. El hecho de no informar un ajuste correcto puede llevar a la aeronave que se salga del área de franqueamiento de obstáculo. Los criterios de esta especificación de navegación deberán cumplir con los criterios de evaluación de la seguridad que figuran en “Evaluación de la Seguridad” de este capítulo. Como resultado de ello, la evaluación de la seguridad para cada procedimiento sólo debe enfocarse en las áreas de riesgo operativo único.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-3
Validación en Tierra y en vuelo Como las aproximaciones RNP AR no tienen un mecanismo fundamental de navegación, no hay ningún requisito para la inspección en vuelo de las señales de
navegación. Debido a la importancia de la publicación de datos correctos, la validación (en tierra y en vuelo) de los procedimientos debe ser realizado de acuerdo con los PANS-OPS, Volumen II, Parte I, Sección 2, Capítulo 4, 4.6. El proceso de validación antes de su publicación deberá confirmar datos de obstáculos, capacidad de volar básica, longitud de trayectorias, ángulos de banqueo, pendientes de descenso, alineación de la pista y la compatibilidad con las funciones predictivas de advertencia de peligro con el terreno (por ejemplo, sistemas de advertencia y conciencia del terreno TAWS), así como los otros factores que
figuran en los PANS-OPS. Cuando el Estado puede comprobar, mediante una validación en tierra, la exactitud e integridad de todos los datos de obstáculo considerados en el diseño del procedimiento, y cualquier otro factor normalmente considerado en la validación en vuelo, entonces el requisito de la validación en vuelo se puede prescindir con respecto a esos factores Debido a la naturaleza única de los procedimientos de aproximación RNP AR, la evaluación en simulador del procedimiento debe ser realizada durante la validación en tierra para evaluar los factores, entre ellos la capacidad de volar básica, que deben considerarse en la validación en vuelo, en la medida de lo posible, antes del vuelo de validación. Debido a las variaciones en las velocidades de los aviones, diseño de los sistemas de control de vuelo, y diseño de sistemas de navegación, la validación en tierra y en vuelo no confirma la capacidad de volar para todos o de diversas aeronaves que llevan a cabo procedimientos de aproximación RNP AR. Una minuciosa evaluación de la capacidad de volar, tanto no es necesario antes de su publicación, ya que la capacidad de volar es evaluada individualmente por el operador como parte de su actualización de la base de datos y el proceso de mantenimiento.
PUBLICACIÓN
En la AIP se debería indicar claramente la aplicación de navegación es RNP AR APCH y que requiere una autorización específica. Todas las rutas deben basarse en las coordenadas WGS-84. Los datos de navegación publicada en el AIP del Estado para el soporte de los procedimientos y las ayudas a la navegación deben cumplir los requisitos del Anexo 15 - Servicios de información aeronáutica y el Anexo 4 - Cartas Aeronáuticas (según proceda). Los datos originales que definen el procedimiento deben estar disponibles para los operadores de una manera apropiada para que los operadores verifiquen sus
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-4
datos de navegación. La precisión de navegación para todos los procedimientos RNP AR APCH debe estar claramente publicada en el AIP.
ENTRENAMIENTO DEL CONTROLADOR
Los controladores de tránsito aéreo, que prestan servicios de control en los aeropuertos, donde se han aplicado aproximaciones RNP, deberán haber completado en entrenamiento que cubre los temas que figuran a continuación. Capacitación Básica
a) ¿Cómo trabajan los sistemas de navegación área (en el contexto de esta especificación de navegación):
I) incluir la capacidad funcional y las limitaciones de esta especificación de navegación;
II) la precisión, integridad, disponibilidad y continuidad incluyendo la supervisión del rendimiento y alerta a bordo;
III) el receptor GPS, RAIM, FDE, y las alertas de integridad;
IV) conceptos de Puntos de recorrido "Fly-by y Fly Over” (y, los diferentes rendimientos en los virajes);
b) requisitos del plan de vuelo;
c) los procedimientos ATC:
I) procedimientos de contingencia ATC;
II) las mínimas de separación;
III) medio ambiente de equipo mixto;
IV) la transición entre los distintos entornos operativos, y
V) La fraseología.
Formación específica para esta especificación de navegación
a) los procedimientos de control relacionados:
I) Técnicas de Vectorización radar (si procede):
- Limitaciones de tramos RF;
- Las limitaciones de velocidad;
b) Aproximaciones RNP y procedimientos conexos:
I) mínimos de aproximación;
II) las solicitudes adicionales de configuración del altímetro;
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-5
c) el impacto de solicitar un cambio de enrutamiento durante un procedimiento.
ESTADO DE SUPERVISIÓN
La infraestructura de ayudas a la navegación deben ser monitoreadas y, cuando proceda, mantenidas por el proveedor de servicios. Advertencias oportunas de los cortes deben expedirse mediante NOTAMs. Información de estado debe proporcionarse de conformidad con el anexo 11 - Servicios de tránsito aéreo para la navegación, instalaciones o servicios que se pueden utilizar para soportar la operación.
SISTEMA DE VIGILANCIA ATS
Cuando estén disponibles, las observaciones por radar de la proximidad de cada aeronave a la trayectoria y la altitud son típicamente observadas por los servicios ATS y capacidad de las aeronaves de mantener la trayectoria son analizadas. Si una observación/análisis indica que una pérdida de la separación o el franqueamiento de obstáculos ha ocurrido, la razón de la aparente desviación de la trayectoria o de la altitud, se determinarán las medidas adoptadas para prevenir una recurrencia.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes
Esta sección identifica los requisitos operacionales para operaciones RNP AR APCH. El cumplimiento operativo de estos requisitos se dirigirá a través de reglamentos operativos nacionales. Además, se requiere de una autorización del Estado responsable del procedimiento RNP AR APCH.
PROCESO DE APROBACIÓN
Esta especificación de navegación no constituye en sí misma material de orientación de reglamentación contra el cual las aeronave o el operador será evaluado y aprobado. Las aeronaves están certificadas por el Estado del fabricante. Los operadores están aprobados de conformidad con sus normas operacionales nacionales. La especificación de navegación proporciona la técnica y los criterios operativos, y no implica la necesidad de re certificación. Cualquier operador con una adecuada aprobación operacional puede llevar a cabo el procedimiento de aproximación por instrumentos RNP AR APCH, de manera similar que los operadores con la debida autorización puede llevar a cabo operaciones CAT II y CAT III ILS. Debido a las singulares necesidades para las operaciones RNP AR APCH y la necesidad de procedimientos para la tripulación estos son específicos para cada

Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-6
aeronave y sistema de navegación, la documentación operacional en apoyo RNP AR APCH es requerida por el fabricante. La documentación debe describir las capacidades de navegación de la aeronave del solicitante en el contexto de las operaciones RNP AR APCH, y proporcionar todos los supuestos, las limitaciones y la información necesaria de apoyo para la seguridad en la realización de operaciones RNP AR APCH. Este documento está destinado principalmente para su uso por parte de los operadores con el fin de apoyar la aprobación operacional por parte de las autoridades reguladoras. Los operadores deben usar las recomendaciones del fabricante en el desarrollo de sus procedimientos y la aplicación de la aprobación. La instalación de equipos no es suficiente por sí solo para obtener la aprobación para su uso en RNP AR APCHs. Los siguientes pasos deben ser completados antes de la realización de operaciones RNP AR APCH: Elegibilidad de Aeronaves La elegibilidad de aeronaves tiene que ser determinado a través de la demostración de cumplimiento contra los criterios de aeronavegabilidad. Las entradas en el Manual de vuelo del avión (AFM), no son necesarias siempre que el Estado acepta la documentación del fabricante. La elegibilidad de equipamiento de la aeronave deberá incluir:
a) calificación de las aeronaves;
b) procedimientos de mantenimiento establecidos, y
c) revisión de la MEL.
La aprobación operacional La evaluación de un operador en particular se hace por el Estado de matrícula de dicho operador, y de conformidad con las normas de funcionamiento (por ejemplo, los JAR-OPS 1, 14 CFR Parte 121), que cuentan con el apoyo y asesoramiento a través del material de orientación. La evaluación debería tener en cuenta:
a) pruebas de elegibilidad de las aeronaves;
b) los procedimientos operativos para el sistema de navegación que se utilizarán, el proceso de la base de datos de navegación del operador debe incluir:
I) programa de validación de datos de navegación (ver Base de Datos de Navegación para obtener información adicional);
II) requisitos de procedimiento operacionales;
III) el programa de vigilancia de la RNP (ver “Supervisión de los Operadores” para obtener información adicional);
IV) Ejecución/ de los siguientes procedimientos vuelo;
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-7
c) el control de ejecución/de los siguientes procedimientos de vuelo aceptables a través de entradas en el manual de operaciones;
d) la identificación de requisitos de entrenamiento de la tripulación de vuelo;
e) en caso necesario, el control del proceso de la base de datos navegación, y
f) la tripulación de vuelo y la ejecución del entrenamiento, basado en los procedimientos de operación, deben estar documentados.
La aprobación operacional serán documentados a través del Estado que aprobó el certificado de operador aéreo (AOC) a través de emisión de una Carta de Autorización (LOA), la especificación apropiada operaciones (especificaciones de Operaciones) o de la enmienda para el manual de operaciones. Descripción del equipo de la aeronave El operador deberá disponer de una lista que detalla la configuración de los componentes y los equipos pertinentes que se utilizarán para la RNP AR APCH. Documentación de Entrenamiento Los operadores comerciales deben tener un programa de entrenamiento direccionado a las prácticas operacionales, procedimientos y entrenamiento de temas relacionados con las operaciones RNP AR APCH (por ejemplo inicial, actualización o entrenamiento periódico para la tripulación de vuelo, despachadores o personal de mantenimiento). Nota.- No es necesario establecer un programa de entrenamiento separado o en régimen si estos elementos son ya un elemento integrado de un programa de entrenamiento. El operador debe identificar qué aspectos de la RNP están cubiertos dentro de un programa de capacitación. Los operadores privados deben estar familiarizados con las prácticas y procedimientos identificados en "ejecución del piloto/ conocimiento del operador y entrenamiento”. Operaciones manuales y listas de comprobación Las operaciones manuales y las listas de comprobación para los operadores comerciales deben tener en cuenta la información y orientación sobre los procedimientos normalizados de trabajo detallado en “Procedimientos Operacionales”. Los manuales deben contener las instrucciones de funcionamiento de navegación y procedimientos de contingencia, si se especifica. Los manuales y listas de chequeo deben ser sometidos a examen como parte del proceso de solicitud. Los operadores privados que operan con las prácticas y procedimientos identificados en "Ejecución de piloto/ conocimiento del operador y el Entrenamiento” .
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-8
Consideraciones de la lista de equipo mínimo (MEL), Cualquier revisión necesaria del MEL para hacer frente a las disposiciones RNP AR APCH debe ser aprobada. Los operadores deben ajustar la MEL, o equivalente, y especificar las condiciones de ejecución. Presentación de la Aprobación Tras la finalización con éxito de los pasos anteriores, el mencionado material debe ser aceptado por el Estado de la autoridad reguladora, la aprobación operacional (sujeto a cualquier condición o limitación) debe obtenerse de acuerdo con las normas nacionales de de funcionamiento. Los elementos de la evaluación de la seguridad enumerados en “Evaluación de la Seguridad” deben ser considerados antes de su aplicación. Una aprobación operacional RNP AR APCH (Carta de Autorización LOA, especificación de operaciones adecuada (Especificaciones de Operaciones), o la enmienda al manual de operaciones), debe ser expedida por el Estado. Una vez se reciba la aprobación del Estado de Registro, los operadores que deseen llevar a cabo operaciones RNP AR APCH en otros Estados que requieren autorización de la autoridad del Estado La aprobación debe identificar el tipo de procedimientos para que el operador esté aprobado: la más baja exactitud de navegación, los procedimientos con tramos RF, y los procedimientos con la precisión requerida en la aproximación frustrada menos de 1,0 NM. Las configuraciones de equipos, modos seleccionados y los procedimientos de la tripulación deben ser definidas para cada tipo de procedimiento RNP AR APCH.
REQUISITOS DE AERONAVES Esta sección describe la performance de las aeronaves y criterios funcionales para las aeronaves que califican para RNP AR APCH. Además de la orientación específica en este capítulo, la aeronave deberá cumplir con la FAA AC 20-129 y bien 20-130, o AC 20-138, o equivalente. El rendimiento del sistema de vigilancia y alerta En esta sección se definen los requisitos generales de rendimiento para las aeronaves de calificación. Los requisitos para RNP AR APCH son únicos debido a la reducción de franqueamiento de obstáculos y funcionalidad avanzada, por lo tanto, los requisitos de esta sección no utiliza la misma estructura que la RNP 4, RNP-1 Básica y RNP APCH. Definición de Trayectoria. El rendimiento de la aeronave es evaluado en torno a la definición de la trayectoria por el procedimiento publicado y RTCA/DO-236B Sección
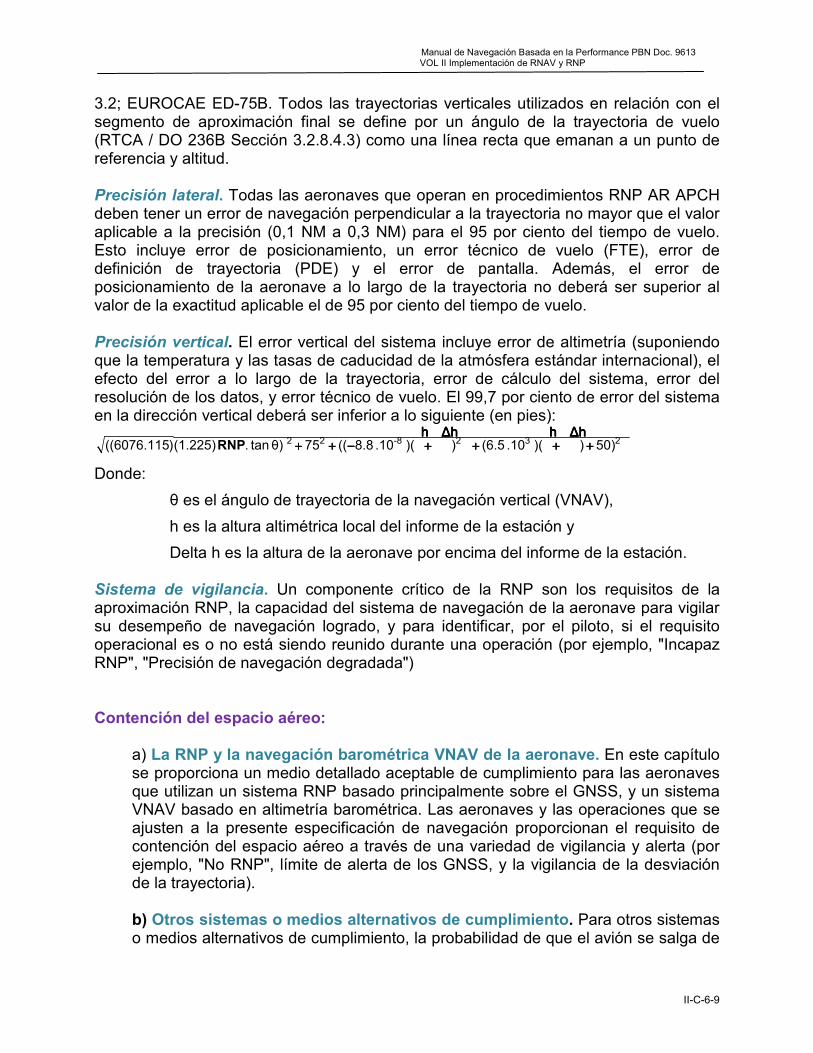
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-9
3.2; EUROCAE ED-75B. Todos las trayectorias verticales utilizados en relación con el segmento de aproximación final se define por un ángulo de la trayectoria de vuelo (RTCA / DO 236B Sección 3.2.8.4.3) como una línea recta que emanan a un punto de referencia y altitud. Precisión lateral. Todas las aeronaves que operan en procedimientos RNP AR APCH deben tener un error de navegación perpendicular a la trayectoria no mayor que el valor aplicable a la precisión (0,1 NM a 0,3 NM) para el 95 por ciento del tiempo de vuelo. Esto incluye error de posicionamiento, un error técnico de vuelo (FTE), error de definición de trayectoria (PDE) y el error de pantalla. Además, el error de posicionamiento de la aeronave a lo largo de la trayectoria no deberá ser superior al valor de la exactitud aplicable el de 95 por ciento del tiempo de vuelo. Precisión vertical. El error vertical del sistema incluye error de altimetría (suponiendo que la temperatura y las tasas de caducidad de la atmósfera estándar internacional), el efecto del error a lo largo de la trayectoria, error de cálculo del sistema, error del resolución de los datos, y error técnico de vuelo. El 99,7 por ciento de error del sistema en la dirección vertical deberá ser inferior a lo siguiente (en pies):
23 2 -82 2 50)))( .10 (6.5))(.10 8.8((75 θ) tan . (1.225))((6076.115 ++++++++++++++++−−−−++++++++
Δ hΔ hΔ hΔ hhhhhΔ hΔ hΔ hΔ hhhhhRNP
Donde:
θ es el ángulo de trayectoria de la navegación vertical (VNAV),
h es la altura altimétrica local del informe de la estación y
Delta h es la altura de la aeronave por encima del informe de la estación.
Sistema de vigilancia. Un componente crítico de la RNP son los requisitos de la aproximación RNP, la capacidad del sistema de navegación de la aeronave para vigilar su desempeño de navegación logrado, y para identificar, por el piloto, si el requisito operacional es o no está siendo reunido durante una operación (por ejemplo, "Incapaz RNP", "Precisión de navegación degradada") Contención del espacio aéreo:
a) La RNP y la navegación barométrica VNAV de la aeronave. En este capítulo se proporciona un medio detallado aceptable de cumplimiento para las aeronaves que utilizan un sistema RNP basado principalmente sobre el GNSS, y un sistema VNAV basado en altimetría barométrica. Las aeronaves y las operaciones que se ajusten a la presente especificación de navegación proporcionan el requisito de contención del espacio aéreo a través de una variedad de vigilancia y alerta (por ejemplo, "No RNP", límite de alerta de los GNSS, y la vigilancia de la desviación de la trayectoria). b) Otros sistemas o medios alternativos de cumplimiento. Para otros sistemas o medios alternativos de cumplimiento, la probabilidad de que el avión se salga de
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-10
la extensión vertical y lateral del volumen de franqueamiento de obstáculos (definidos por la OACI, por el Manual de diseño de Procedimientos de performance de navegación requerida y autorización requerida (RNP AR) (Doc. 9905) (en preparación) no debe superar el 10-7 por aproximación, incluyendo la aproximación y aproximación frustrada. Este requisito puede ser satisfecho por una evaluación de la seguridad operacional aplicando:
I) adecuados métodos numéricos cuantitativos;
II) calidad operacional y consideraciones procedimentales y de mitigación, o
III) una combinación apropiada de ambos métodos cuantitativos y cualitativos.
Nota 1.- Este requisito se aplica a la probabilidad total de excursión fuera del volumen de franqueamiento de obstáculos, incluidos los eventos causados por condiciones latentes (integridad) y por las condiciones detectadas (continuidad), si el avión no permanece en el volumen de franqueamiento de obstáculos después de que la falla es anunciada (teniendo en cuenta la envergadura de la aeronave). La pantalla límite de la alerta, la alerta latente, el tiempo de reacción de la tripulación y la respuesta de la aeronave deben ser consideradas a la hora asegurar que la aeronave no se salga del volumen de franqueamiento de obstáculos. El requisito se aplica a una sola aproximación, teniendo en cuenta el tiempo de exposición de la operación y la geometría de las ayudas a la navegación y el performance de navegación disponibles para cada aproximación publicada. Nota 2. - Este requisito de contención se deriva de los requisitos operacionales, que es notablemente diferente a la especificada en el requisito de contención RTCA/DO 236B (EUROCAE ED-75B). El requisito en RTCA/DO-236B (EUROCAE ED-75B) fue desarrollado para facilitar el diseño del espacio aéreo y no directamente a equiparar el franqueamiento de obstáculos.
Criterios específicos para los servicios de navegación Esta sección identifica las únicas cuestiones para los sensores de navegación en el contexto de la RNP AR APCHs. Sistema de posicionamiento global (GPS):
a) El sensor debe cumplir con las directrices del AC 20-138. Para los sistemas que cumplen con la AC 20-138, las siguientes precisiones de sensor pueden ser usadas en el análisis de la precisión total del sistema sin necesidad de justificación: la precisión del Sensor GPS es mejor que 36 m (119 pies) (95 por ciento), y el GPS aumentado (o GBAS o SBAS) la precisión del sensor es mejor que 2 metros (7 pies) (95 por ciento).
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-11
b) En el caso de un latente fallo del satélite GPS y geometría marginales del satélite GPS (por ejemplo, límite horizontal de la integridad (HIL) igual al límite de la alerta horizontal), la probabilidad de que la aeronave permanezca dentro del volumen de franqueamiento de obstáculos utilizado para evaluar el procedimiento debe ser superior al 95 por ciento (ambos lateral y vertical).
Nota.- Sensores basados en GNSS con salida de HIL, también conocido como nivel horizontal de protección (HPL) (véase el AC 20-138A, Apéndice 1 y RTCA/DO-229C para una explicación de estos términos). El HIL es una medida de la posición de estimación del error asumiendo que una latente falla está presente. En lugar de un análisis detallado de los efectos de latentes fallos en el error total del sistema, un medio aceptable de cumplimiento para los sistemas basados en GNSS es garantizar que el HIL sigue siendo inferior al doble de la precisión de la navegación, menos que el 95 por ciento del FTE, durante la operación RNP AR APCH.
Sistema de referencia inercial (IRS). Un sistema de referencia inercial debe satisfacer los criterios de los EE.UU. 14 CFR parte 121, Apéndice G, o equivalente. Mientras que en el Apéndice G se define el requisito de 2 NM por hora (95 por ciento) por la velocidad de deriva para los vuelos de hasta 10 horas, esta tasa no podrá aplicarse a un sistema RNAV después de la pérdida de actualización de posición. Sistemas que han demostrado el cumplimiento con la Parte 121, Apéndice G, puede suponerse que tener una velocidad de deriva inicial, de 8 NM/hora para la primeros 30 minutos (95 por ciento), sin más justificación. Los fabricantes de aeronaves y los solicitantes pueden demostrar el rendimiento de inerciales mejorados de acuerdo con los métodos descritos en el Apéndice 1 o 2 de la Orden FAA 8400.12A. Nota.- Las soluciones de posición GPS/INS integrados reducen la tasa de degradación después de la pérdida de la actualización de posición. Para "Perfectamente acoplado" GPS/IRUs, RTCA/DO-229C, Apéndice I, ofrece orientación adicional. Equipos de medición de distancia (DME). Inicio de todos los procedimientos RNP AR APCH basados en actualización GNSS. Excepto en los casos específicamente designado en un procedimiento como "no autorizado", la actualización DME/DME, se puede utilizar como un modo de reversión durante la aproximación o aproximación frustrada cuando el sistema cumple con la precisión de la navegación. El fabricante deberá identificar las limitaciones en la infraestructura DME o el procedimiento determinado para aeronaves que cumplen con este requisito. VHF omnidireccional Range (VOR). Para la implementación inicial RNP AR APCH, el sistema RNAV no puede utilizar la actualización VOR. El fabricante deberá identificar las limitaciones en la infraestructura VOR o el procedimiento para una determinada aeronave que cumple con este requisito. Nota.- Este requisito no implica la capacidad de un equipo que debe tener un medio directo de inhibición de la actualización VOR. Un medio procedimental para la
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-12
tripulación de vuelo para inhibir la actualización VOR o ejecución de una aproximación frustrada, si revierte a actualización VOR, se puede satisfacer este requisito. Para los sistemas de sensores múltiples, debe haber reversión automática a un sensor RNAV alterno si el sensor RNAV primario falla. La reversión automática de un sistema de sensores múltiples a otro sistema de sensores múltiples no es requerido. El 99,7 por ciento de las aeronaves el error del sistema de altimetría para cada aeronave (suponiendo que la temperatura y las tasas de caducidad de la Atmósfera estándar internacional) debe ser igual o inferior a la siguiente con la configuración de aproximación de la aeronave: ASE = -8.8 ×10-8 ×H2 + 6.5 ×10-3 ×H + 50 (ft) Donde: H es la altitud verdadera de la aeronave Sistemas de compensación de temperatura. Sistemas que proporcionan las correcciones basadas en temperatura para navegación barométrica VNAV la orientación deberá cumplir con RTCA/DO-236B, Apéndice H.2. Esto se aplica al segmento de aproximación final. El cumplimiento a esta norma debe documentarse para permitir que el operador lleve a cabo aproximaciones RNP cuando la temperatura actual está por debajo o por encima del límite del diseño del procedimiento publicado. En el apéndice H también proporciona orientación sobre cuestiones operacionales relacionadas con los sistemas de compensación de la temperatura, como la interceptación de la trayectoria compensada desde altitudes del procedimiento no compensada Los requisitos funcionales Nota.- Orientación adicional e información relativa a muchas de las funciones requeridas se proporcionan en EUROCAE ED-75A / RTCA DO-236B. Requisitos generales Definición de Trayectorias y planificación de los vuelos:
a) Mantenimiento de la trayectoria y las transiciones de tramos. La aeronave deberá tener la capacidad para ejecutar las transiciones de tramos y mantener las trayectorias de conformidad con las siguientes trayectorias:
I) una línea geodésica entre dos puntos de referencia;
II) una trayectoria directa a un punto de referencia;
III) una trayectoria especificada a un punto de referencia, definida por un curso, y
IV) una trayectoria especificada a una altitud.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-13
Nota 1.- La industria de las normas de estas trayectorias se pueden encontrar en EUROCAE ED-75A / RTCA DO-236B y Especificación ARINC 424, que se refieren a ellos como terminaciones de trayectorias TF, DF, CF, y FA. Además, ciertos procedimientos requieren tramos RF. EUROCAE ED-75A/RTCA DO-236B y ED 77/ DO-201A que describen la aplicación de estas trayectorias con más detalle.
Nota 2.- El sistema de navegación, puede acoger otras terminaciones de trayectorias ARINC 424 (por ejemplo, Rumbo a una Terminación (VM), y el procedimiento de aproximación frustrada puede utilizar estos tipos de trayectorias cuando no hay necesidad de contención RNP.
b) Puntos de recorrido fly-by y Fly Over. La aeronave deberá tener la capacidad de ejecutar puntos de recorrido fly-by y Fly Over. Para virajes fly-by, el sistema de navegación debe limitar la definición de trayectoria con la zona de transición teórica que se define en EUROCAE ED-75B/RTCA DO-236B y bajo las condiciones de viento señaladas en el Manual de diseño de Procedimientos de rendimiento de navegación requerida y Autorización requerida (RNP AR) de la OACI (Doc. 9905) (en preparación). El viraje Fly Over no es compatible con las trayectorias de vuelo RNP y sólo se utiliza cuando no hay requisitos de trayectorias repetibles.
c) errores de resolución de puntos de recorrido. La base de datos de navegación deben proporcionar datos suficientes para asegurar la resolución del sistema de navegación y alcance la precisión requerida. El error de resolución de puntos de recorrido debe ser inferior o igual a 60 pies (18 metros), incluyendo tanto la resolución de almacenamiento de datos y la resolución computacional del sistema RNP utilizado internamente para la construcción de plan de vuelo de puntos de recorrido. La base de datos de navegación debe contener ángulos verticales (ángulos de trayectoria de vuelo) almacenadas a una resolución de centésimas de grado, con resolución computacional de tal manera que el sistema defina la trayectoria esta dentro de 1,5 m (5 pies) de la ruta publicada.
d) La función de capacidad de "directo a". El sistema de navegación debe tener una función "directo a" que la tripulación de vuelo puede activar en cualquier momento. Esta función tiene que estar disponible para cualquier punto de referencia. El sistema de navegación también debe ser capaz de generar una trayectoria geodésica a lo designados "TO" punto de referencia, sin "S-viraje" y sin retraso indebido.
e) Capacidad para definir una trayectoria vertical. El sistema de navegación debe ser capaz de definir una trayectoria vertical por un ángulo de trayectoria de vuelo a un punto de referencia. El sistema también debe ser capaz de especificar una trayectoria vertical entre limitaciones de altitud a dos puntos de referencia en el plan de vuelo. Limitaciones de altitud en un punto de referencia debe ser definido como uno de los siguientes:
I) una limitación de altitud "AT" o "ABOVE" (por ejemplo, 2400A puede ser apropiado para situaciones donde se limitan la trayectoria vertical no es requerido);
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-14
II) una limitación de altitud "AT" o " ABOVE " (por ejemplo, 4800B puede ser apropiado para situaciones en las que se limitan la trayectoria vertical no es requerido);
III) una limitación de altitud "AT" (por ejemplo, 5200), o
IV) una limitación "ventana" (por ejemplo, 2400A, 3400B).
Nota.- Para procedimientos RNP AR APCH, cualquier segmento con una trayectoria vertical publicada se definirán sobre la base de una trayectoria con un ángulo a un punto de referencia y la altitud.
f) Altitudes y/o velocidad asociadas con los procedimientos terminales publicados deben ser extraídos de la base de datos de navegación.
g) El sistema debe ser capaz de construir una trayectoria para ofrecer la orientación desde la posición actual a una limitación verticalmente a un punto de referencia.
h) Capacidad para cargar los procedimientos desde la base de datos de navegación. El sistema de navegación debe tener la capacidad de cargar todo el procedimiento (s) a volar dentro del sistema RNP desde la base de datos de navegación a bordo. Esto incluye la aproximación (incluido el ángulo vertical), la aproximación frustrada y la transición de aproximación para el aeropuerto seleccionado y la pista.
i) Los medios para recuperar y mostrar los datos de navegación. El sistema de navegación debe proporcionar la capacidad para la tripulación de vuelo para verificar el procedimiento a ser volado a través de la revisión de los datos almacenados en la base de datos de navegación a bordo. Esto incluye la capacidad de revisar los datos para los puntos de recorrido individuales y para las ayudas a la navegación.
j) La Declinación magnética. Para trayectorias definidas por un curso (curso a un punto de referencia (CF) y de un punto de referencia a una altitud (FA) terminaciones de trayectoria), el sistema de navegación debe utilizar el valor de la declinación magnética para el procedimiento en la base de datos de navegación.
k) Los cambios en la precisión de la navegación. Los cambios RNP para reducir la precisión de navegación deben ser completados por la definición de tramos con la menor precisión de la navegación, teniendo en cuenta la alerta latente del sistema de navegación. Todo procedimiento operacional necesario para lograr esto deben ser identificados.
l) secuenciación automática de tramos. El sistema de navegación debe proporcionar la capacidad de forma automática de secuenciar el siguiente tramo y mostrar la secuencia a la tripulación de vuelo en una forma fácilmente visible.
m) Una pantalla de restricciones de la altitud asociadas con los puntos de referencia del plan de vuelo debe estar disponible para el piloto. Si hay una base de datos de navegación especificada de un procedimiento con un ángulo de la trayectoria de vuelo asociada con cualquier tramo del plan de vuelo, el equipo debe mostrar el ángulo de la trayectoria de vuelo para ese tramo.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-15
Demostración del gobierno del rendimiento de la trayectoria. Demostración del gobierno del rendimiento de la trayectoria (error técnico de vuelo FTE) debe ser completado en una gran variedad de condiciones operativas, es decir, dadas las condiciones normales y condiciones no normales (por ejemplo, ver la FAA AC 120-29A, 5.19.2.2 y 5.19.3.1). Procedimiento realista y representativo debe ser usado (por ejemplo, el número de puntos de recorrido, colocación de puntos de recorrido, geometría de los segmentos, tipos de tramos, etc.) La evaluación no normal debe considerar lo siguiente:
a) Criterios aceptables para ser utilizados para evaluar las fallas probables y fallo del motor durante la calificación de la aeronave demostrará que la trayectoria de la aeronave es mantenida dentro de un corredor 1xRNP, y 22 m (75 pies) en la vertical. La documentación propia de esta demostración, en el manual de vuelo del avión (AFM), extensión AFM, o documento que soporta la apropiada condición de servicio de la aeronave, alivia las evaluaciones operativas.
b) Casos poco importantes de fallo RNP deben ser evaluadas para demostrar que, bajo estas condiciones, el procedimiento de la aeronave pueden ser extraídos de forma segura. Los casos de fallo podrían incluir reinicio de sistema dobles, control de superficies de vuelo fugitivas y la pérdida completa de la función de guiado de vuelo.
c) La demostración del rendimiento de la aeronave durante la evaluación operacional puede ser basada en una combinación de análisis y evaluaciones técnicas de vuelo usando el juicio de los expertos.
Pantallas:
a) Visualización Continua de la desviación. El sistema de navegación debe proporcionar la capacidad de mostrar continuamente al piloto que vuela, sobre los instrumentos primarios de vuelo para la navegación de la aeronave, la posición de la aeronave en relación con la trayectoria RNP definida (tanto la desviación lateral como la vertical). La pantalla debe permitir al piloto distinguir fácilmente si la desviación perpendicular a la derrota excede la precisión de la navegación (o un valor menor) o si la desviación vertical supera los 22 m (75 pies) (o un valor menor).Se recomienda que una escala de desviación adecuada en la pantalla no numérica (es decir, indicador de desviación lateral y vertical) se encuentre en el campo óptimo de visión principal del piloto. Una escala del CDI fijada es aceptable siempre y cuando el CDI demuestre la sensibilidad de escala adecuada para la exactitud de navegación y la operación. Con un CDI escalable, la escala puede ser derivada desde la selección de la RNP, y no requieren la selección de una escala del CDI independiente. La alerta y anunciación de límites también debe coincidir con los valores de ampliación de la escala. Si el equipo usa una precisión de navegación por defecto para describir el modo de operación (por ejemplo, en ruta, área terminal y aproximación) entonces se muestra el modo de funcionamiento, es
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-16
un medio aceptable del cual la tripulación de vuelo se puede derivar de la sensibilidad de escala CDI.
Pantalla numérica de desviación o representación gráfica sobre una pantalla de mapas, sin un indicador adecuado de escala de desviación, es generalmente no considerada aceptable para el seguimiento de la desviación. El uso de pantallas numéricas y pantallas de mapas puede ser factible en función del volumen de trabajo de la tripulación de vuelo, características de la pantalla, y los procedimientos y la formación de la tripulación vuelo. Adicional iniciar entrenamiento recurrente de la tripulación de vuelo (o línea de la experiencia) es necesario, por lo tanto, una solución de este tipo podría aumentar la carga de trabajo de la tripulación de vuelo durante la aproximación e imponer costes adicionales al operador para apoyar los requisitos de entrenamiento.
b) Identificación del punto de recorrido activo (TO). El sistema de navegación debe proporcionar una pantalla de identificación de los puntos de recorrido activos tanto en el campo de visión óptima principal del piloto, o sobre una pantalla de fácil acceso y visible a la tripulación de vuelo.
c) Indicación de la distancia y el rumbo. El sistema de navegación debe proporcionar una pantalla donde se muestre la distancia y el rumbo al punto de recorrido activo (TO) en el campo de visión óptimo principal del piloto. En caso de que no sea viable, una página de fácil acceso en una unidad de control, fácilmente visibles a la tripulación de vuelo, puede mostrar los datos.
d) Indicación de la velocidad y el tiempo al punto de recorrido activo (TO). El sistema de navegación debe proporcionar una pantalla donde muestre la velocidad y el tiempo al punto de recorrido activo (TO), en el campo de visión óptimo principal del piloto. En caso de que no sea viable, una página de fácil acceso en una pantalla de unidad de control, fácilmente visibles a la tripulación de vuelo, puede mostrar los datos.
e) Indicación de TO/FROM al punto de referencia activo. El sistema de navegación debe proporcionar una indicación TO/FROM en el campo de visión óptimo principal del piloto.
f) Pantalla de seguimiento de la trayectoria deseada. El sistema de navegación debe tener la capacidad de mostrar continuamente al piloto que vuela la trayectoria deseada del avión. Esta pantalla debe estar sobre los instrumentos primarios de vuelo para la navegación de la aeronave.
g) Pantalla donde se muestra la trayectoria de la aeronave. El sistema de navegación debe proporcionar una pantalla donde se muestre la trayectoria actual de la aeronave (o el error del ángulo de la trayectoria), también en el campo de visión óptimo principal del piloto, o sobre una pantalla de fácil acceso y visible a la tripulación de vuelo.
h) Anunciación de Fallas. La aeronave deberá proporcionar un medio para la anunciación de fallas de cualquier componente de la aeronave del sistema RNP, incluyendo los sensores de navegación. El anuncio debe ser visible para el piloto y ubicado en el campo de visión óptimo principal.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-17
i) Selector de Cursos Esclavizado. El sistema de navegación debe proporcionar un selector de cursos esclavizado automático a la trayectoria RNP calculada.
j) Pantalla de trayectoria RNP. El sistema de navegación debe proporcionar un medio fácilmente visible para que el piloto pueda monitorear y verificar que la aeronave vuela por la trayectoria RNP definida y la posición de la aeronave en relación con la trayectoria definida.
k) Indicación de la distancia para ir. El sistema de navegación debe proporcionar la capacidad de mostrar la distancia para ir a cualquier punto de recorrido seleccionado por la tripulación de vuelo.
l) Muestra en la pantalla de la distancia entre los puntos del plan de vuelo. El sistema de navegación debe proporcionar la capacidad para mostrar la distancia entre puntos de recorrido del plan de vuelo.
m) Indicación de la desviación. El sistema de navegación debe proporcionar una pantalla numérica de la desviación vertical con una Resolución de 3 metros (10 pies) o menos, y la desviación lateral con una resolución de 0,01 NM o menos.
n) Indicación de la altitud barométrica. El avión debe mostrar la altitud barométrica de dos fuentes independientes de altimetría, una en cada uno de los campos de visión óptimo principal de los pilotos.
Nota 1.- Esta pantalla soporta una comprobación cruzada de funcionamiento (monitor comparador) de fuentes de altitud. Si las fuentes de altitud de las aeronaves son automáticamente comparadas, la salida de las fuentes de altimetría independientes, incluidas los sistemas independientes de presión estática del aire de la aeronaves, deben ser analizados para asegurar que ellas pueden proporcionar una alerta al piloto en el campo de visión óptimo principal, cuando las desviaciones entre las fuentes superen los 30 m (± 100 pies). Esta función del monitor comparador debe ser documentado, ya que pueden eliminar la necesidad para una mitigación operacional.
Nota 2.- La entrada del ajuste de altímetro debe ser utilizada simultáneamente por el sistema de altimetría de la aeronave y por el sistema RNP. Una sola entrada es necesaria para evitar el posible error de la tripulación. Los ajustes separados de altímetro para el sistema RNP están prohibidos.
o) La visualización de los sensores activos. La aeronave deberá mostrar el sensor de navegación actual (s) en uso. Se recomienda que esta pantalla este ubicada en el campo de visión óptimo principal.
Nota.- Esta pantalla se utiliza para apoyar los procedimientos operativos de contingencia. Si esa pantalla no está en el principal campo de visión óptimo, los procedimientos de la tripulación puede mitigar la necesidad de esta pantalla si la carga de trabajo está determinada a ser aceptable.
Diseño de garantía. El diseño del sistema de aseguramiento debe ser compatible con al menos una condición de falla mayor para la visualización engañosa guía lateral o una vertical sobre un RNP AR APCH.
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-18
Nota.- La visualización engañosa de una guía lateral o vertical RNP se considera un peligro grave (severa mayor) la condición de falla para RNP AR APCHs con una precisión de la navegación menos de RNP-0.3. Los sistemas diseñados de conformidad con este efecto deben ser documentados, ya que pueden eliminar la necesidad de algunas operaciones de mitigación de la aeronave. Base de datos de navegación. El sistema de navegación de la aeronave debe utilizar
a bordo una base de datos de navegación que puede recibir actualizaciones de conformidad con el ciclo AIRAC y permitir la recuperación y la carga de los procedimientos RNP AR APCH en el sistema RNP. Sobre la base de datos de navegación de a bordo deberán estar protegidos contra las modificaciones de datos por parte de la tripulación de vuelo, de los datos almacenados. Nota.- Cuando un procedimiento se carga desde la base de datos, el sistema RNP debe volar el procedimiento tal como está publicado. Esto no se opone a la tripulación
de vuelo de tener los medios para modificar un procedimiento o ruta ya cargado en el sistema RNP. Sin embargo, los procedimientos almacenados en la base de datos de navegación no deben ser modificados y debe permanecer intacto en la base de datos de navegación para uso futuro y de referencia. La aeronave deberá proporcionar un medio para mostrar el período de validez de la base de datos de navegación a bordo a la tripulación de vuelo. Requisitos para aproximaciones RNP AR con tramos RF El sistema de navegación debe tener la capacidad para ejecutar transición de tramos y mantener trayectorias consistentes con un tramo RF entre dos puntos de referencia. La aeronave deberá tener una pantalla de mapas electrónicos, de procedimiento seleccionados. El FMC, el sistema de director de vuelo y el piloto automático debe ser capaz de comandar un ángulo de banqueo de hasta 25 grados por encima de 121 m (400 pies) AGL y de hasta 8 grados por debajo de 121 m (400 pies) AGL. Al iniciar sobre paso o una aproximación frustrada (mediante la activación de TOGA u otros medios), el modo de guía de vuelo debe permanecer en LNAV para permitir la orientación de trayectoria continua durante un tramo RF. Al evaluar un error técnico de vuelo sobre tramos RF, el efecto de la rodadura de entrada y salida del viraje debe ser considerado. El procedimiento está diseñado para proporcionar un margen de 5 grados de maniobrabilidad, a fin de que el avión para
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-19
volver a la trayectoria deseada después de un ligero rebasamiento (overshoot) en el inicio del viraje. Requisitos para las aproximaciones RNP AR a menos de RNP 0,3 No hay un solo punto de fallo. No hay un solo punto de fallo que pueda causar la pérdida de orientación compatible con la precisión de la navegación asociadas con la aproximación. Normalmente, la aeronave deberá tener como mínimo el siguiente equipo:
• Doble sensor GNSS, • Sistemas de gestión de vuelo doble, • Doble sistemas de datos , • Doble sistema de pilotos automáticos, y • Una sola unidad de referencia inercial (IRU).
Diseño de garantía. El diseño del sistema de aseguramiento debe ser compatible con al menos una condición de falla mayor por la pérdida de guía lateral o una vertical para aproximaciones RNP AR APCH, donde menos el RNP 0,3 es necesario para evitar obstáculos o terreno mientras se ejecuta una aproximación. Nota.- Para operaciones RNP AR APCH se requieren menos de 0,3 a fin de evitar obstáculos o el terreno, la pérdida de guiado lateral en la pantalla se considera una condición de falla o peligro grave (severa mayor). La AFM deberá documentar sistemas diseñados en consonancia con este efecto. Esta documentación debe describir la configuración concreta de la aeronave o el modo de operación que realiza la precisión de navegación inferior a 0,3. Cumplir este requisito puede ser sustituido por el requisito general para equipos dobles descritos anteriormente. Guía en el sobre paso. Tras iniciar un sobre paso o una aproximación frustrada o (mediante la activación del Take-Off/Go-Around (TOGA) o por otros medios), el modo de guiado de vuelo debe permanecer en LNAV para permitir el seguimiento continuo de la trayectoria durante un tramo RF. Si la aeronave no ofrece esta capacidad, se aplican los siguientes requisitos:
a) Si la aeronave soporta tramos RF, la trayectoria lateral después de iniciar un sobre paso (TOGA), (un mínimo de 50 segundos en segmento recto entre el tramo RF y el punto final de la DA), debe estar dentro de un 1 grado de la trayectoria definida por el segmento recto a través del punto DA. El anterior viraje puede ser una medida angular arbitraria y radio tan pequeño como 1 NM, con una velocidad acorde con la aproximación y el radio de viraje.
b) La tripulación de vuelo debe ser capaz de acoplar el piloto automático o director de vuelo al sistema RNP (enganchado con LNAV) por 121 m (400 pies) AGL.
Pérdida del GNSS. Después de iniciar un sobre paso o una aproximación frustrada tras la pérdida de los GNSS, la aeronave debe automáticamente revertir a otro medio de navegación que cumpla con la precisión de la navegación.
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-20
Requisitos de Aproximación frustrada con menos de RNP 1,0 Único punto de fallo. No hay un solo punto de fallo que puede causar la pérdida de guía compatible con la precisión de la navegación asociadas con un procedimiento de aproximación frustrada. Normalmente, la aeronave deberá tener, como mínimo, los siguientes equipos:
• Doble sensor GNSS, • Sistemas de gestión de vuelo doble, • Doble sistemas de datos , • Doble sistema de pilotos automáticos, y • Una sola unidad de referencia inercial (IRU).
Diseño de garantía. El diseño del sistema de aseguramiento debe ser compatible con al menos una condición de falla mayor por la pérdida de guía lateral o una vertical en aproximaciones RNP AR APCH donde la RNP es menos de 1,0 NM es necesario para evitar obstáculos o terreno, mientras se ejecuta una aproximación frustrada. Nota.- Para operaciones RNP AR APCH en aproximación frustrada que requieran menos de 1.0 NM a fin de evitar obstáculos o el terreno, la pérdida de guiado lateral en la pantalla se considera una condición de peligro o falta grave (Mayor severo). Los sistemas diseñados de conformidad con este efecto deben estar documentados en el AFM. Esta documentación debe describir la configuración de la aeronaves o el modo de funcionamiento que logre la precisión de la navegación a menos de 1.0 NM. El cumplimiento de esta exigencia puede sustituir la exigencia general de un equipo doble descrito anteriormente. Guía en el Sobre paso. Al iniciar un sobre paso o una aproximación frustrada (mediante la activación de la TOGA u otros medios), el modo de guiado de vuelo debe permanecer en LNAV para permitir la continua guía durante un tramo RF. Si la aeronave no ofrece esta capacidad, se aplican los siguientes requisitos:
a) Si la aeronave soporta tramos RF, la trayectoria lateral después del inicio de un sobre paso (TOGA) (un mínimo de 50 segundos de segmento recto entre el tramo RF y el punto final de la DA) debe estar dentro de 1 grado de la trayectoria definida por el segmento recto a través del punto DA. El anterior viraje puede ser una medida angular arbitraria en un radio tan pequeño como 1 NM, con una velocidad acorde con la aproximación y el radio de viraje.
b) La tripulación de vuelo debe ser capaz de acoplar el piloto automático o director de vuelo al sistema RNP (enganchado con LNAV) por 121 m (400 pies) AGL.
Pérdida de los GNSS. Después de iniciar un sobre paso o una aproximación frustrada tras la pérdida de los GNSS, la aeronave debe automáticamente revertir a otro medio de navegación que cumpla con la precisión de la navegación.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-21
PROCEDIMIENTOS OPERATIVOS
Consideraciones pre-vuelo Lista de equipo mínimo (MEL). La MEL de los operadores debe ser desarrollado o revisados para hacer frente a los requisitos de equipos de aproximación por instrumentos RNP AR APCH. La orientación para estos requisitos de equipo está disponible desde el fabricante de aviones. El equipo requerido puede depender de la precisión de la navegación pretendida y si la aproximación frustrada RNP requiere menos que 1.0 NM, Por ejemplo, los GNSS y piloto automático son normalmente necesarios para pequeñas precisiones de navegación. Equipo doble es típicamente necesario para aproximaciones cuando se utiliza una línea de menos de RNP 0,3 y/o donde la aproximación frustrada tiene una RNP a menos de 1.0 NM. Un sistema de alerta de terreno operable clase A (TAWS) es requerido para todos los procedimientos RNP AR APCH. Se recomienda que el uso de TAWS una altitud que compensa para los efectos de presión y temperatura local (por ejemplo, altitud barométrica corregida y GNSS), e incluye significativos datos de obstáculos y terreno. La tripulación de vuelo debe ser consciente de los equipos requeridos. Director de vuelo y piloto automático. Procedimientos RNP AR APCH con una precisión de navegación inferior a 0,3 NM o con tramos RF RNP requieren el uso de un piloto automático o director de vuelo conducido por el sistema RNP en todos los casos. Por lo tanto, el piloto automático/vuelo director debe funcionar con precisión adecuada para las trayectorias laterales y verticales requeridas por un procedimiento RNP AR APCH. Cuando la ejecución de un vuelo se basa en un RNP AR APCH requiere que el piloto automático de destino y/o suplente, el expedidor deberá determinar que el piloto automático está instalado y en funcionamiento. Evaluación de la ejecución RNP. El operador debe tener una capacidad de predicción de rendimiento cuyas previsiones pueden ser o no especificas, el RNP estará disponible en el momento y lugar deseado de una operación RNP AR APCH. Esta capacidad puede ser un servicio en tierra y no necesita que sea residente en el equipo de aviónica de la aeronave. El operador deberá establecer procedimientos que requieran el uso de esta capacidad como una herramienta pre-vuelo, y como una herramienta de ejecución de un vuelo y como una herramienta de seguimiento del vuelo en el caso de fallos reportados. La evaluación RNP debe considerar la combinación específica de la capacidad de los aviones (sensores y la integración).
a) evaluación de la RNP cuando hay actualización de los GNSS. Esta capacidad de predicción debe tener en cuenta para conocer y predecir cortes de los satélites GNSS u otros efectos sobre los sensores de navegación del sistema. El programa de predicción no debería usar un ángulo de máscara de elevación inferior a 5 grados, como la experiencia operacional indica que las señales del satélite a bajas elevaciones no son fiables. La predicción debe utilizar la actual constelación GPS con el (RAIM) (o equivalente) algoritmo idéntico que es utilizado
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-22
en el equipo actual. Para aproximaciones RNP AR APCH con terrenos altos, el uso de un ángulo de máscara de elevación adecuado al terreno.
b) Inicialmente, los procedimientos RNP AR APCH requieren la actualización de los GNSS.
Exclusión de ayudas a la navegación. El operador deberá establecer procedimientos para excluir instalaciones de ayudas a la navegación de conformidad con NOTAMs (por ejemplo, DMEs, VORs, localizadores). Los controles internos de razonabilidad de aviónica puede no ser adecuada para las operaciones RNP AR APCH. Vigencia de la base de datos de navegación. Durante la inicialización del sistema, los pilotos de los aviones equipados con un sistema RNP certificado, debe confirmar que la base de datos de navegación esta actualizada. La base de datos de navegación se espera que este actualizada para la actual duración del vuelo. Si el ciclo AIRAC cambiará durante el vuelo, los operadores y los pilotos deben establecer procedimientos para garantizar la exactitud de los datos de navegación, incluyendo la adecuación de las instalaciones de navegación utilizadas para definir las rutas y los procedimientos de vuelo. Tradicionalmente, esto se ha logrado mediante la comprobación de los datos electrónicos en comparación con los productos en papel. Un medio aceptable es comparar las cartas aeronáuticas (nuevas y antiguas) para verificar puntos de referencia antes de la ejecución del vuelo. Si una carta enmendada es publicada para el procedimiento, la base de datos no debe ser utilizada para llevar a cabo la operación. Consideraciones en vuelo Modificación del plan de vuelo. Los pilotos no están autorizados a volar un procedimiento RNP AR APCH publicado a menos que es recuperable por el nombre del procedimiento de la base de datos de navegación de las aeronaves y la carta de navegación se ajusta al procedimiento. La trayectoria lateral no debe ser modificada, con la excepción de la aceptación de una autorización para ir directamente a un punto de referencia en el procedimiento de aproximación que esta antes del FAF y que no precederá inmediatamente a un tramo RF. La otra única modificación permitida para el procedimiento cargado es cambiar la altura y/o limitaciones de velocidad en el punto de recorrido inicial, intermedio o segmento de aproximación frustrada (por ejemplo, para aplicar las correcciones de temperatura fría o cumplir con una autorización-instrucción ATC). Lista del equipo Requerido. La tripulación de vuelo debe tener una lista del equipo requerido para la realización de la RNP AR APCHs o métodos alternativos para direccionar el vuelo frente a fallos de los equipos que prohíbe la RNP AR APCHs (por ejemplo, un manual de referencia rápida). Gestión de la RNP. Los procedimientos operativos de la tripulación de vuelo debe garantizar que el sistema de navegación utiliza la adecuada precisión de navegación en toda la aproximación. Si hay varias líneas de mínimos asociada con una precisión de
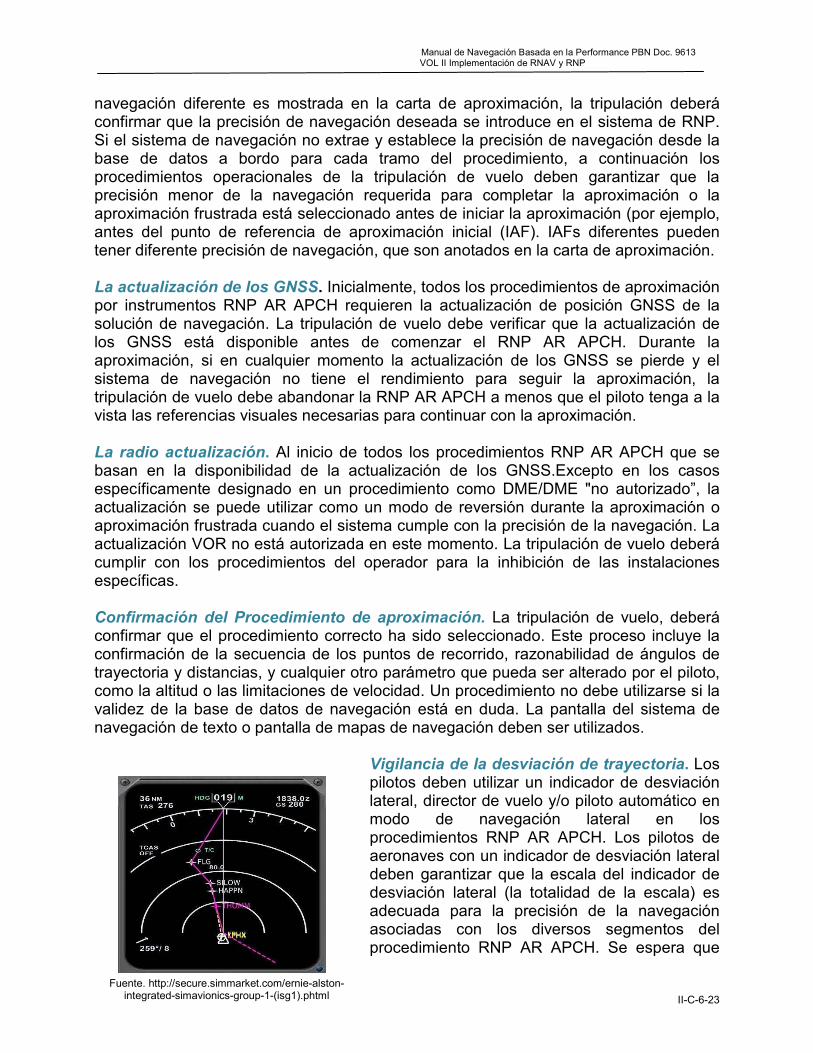
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-23
navegación diferente es mostrada en la carta de aproximación, la tripulación deberá confirmar que la precisión de navegación deseada se introduce en el sistema de RNP. Si el sistema de navegación no extrae y establece la precisión de navegación desde la base de datos a bordo para cada tramo del procedimiento, a continuación los procedimientos operacionales de la tripulación de vuelo deben garantizar que la precisión menor de la navegación requerida para completar la aproximación o la aproximación frustrada está seleccionado antes de iniciar la aproximación (por ejemplo, antes del punto de referencia de aproximación inicial (IAF). IAFs diferentes pueden tener diferente precisión de navegación, que son anotados en la carta de aproximación. La actualización de los GNSS. Inicialmente, todos los procedimientos de aproximación por instrumentos RNP AR APCH requieren la actualización de posición GNSS de la solución de navegación. La tripulación de vuelo debe verificar que la actualización de los GNSS está disponible antes de comenzar el RNP AR APCH. Durante la aproximación, si en cualquier momento la actualización de los GNSS se pierde y el sistema de navegación no tiene el rendimiento para seguir la aproximación, la tripulación de vuelo debe abandonar la RNP AR APCH a menos que el piloto tenga a la vista las referencias visuales necesarias para continuar con la aproximación. La radio actualización. Al inicio de todos los procedimientos RNP AR APCH que se basan en la disponibilidad de la actualización de los GNSS.Excepto en los casos específicamente designado en un procedimiento como DME/DME "no autorizado”, la actualización se puede utilizar como un modo de reversión durante la aproximación o aproximación frustrada cuando el sistema cumple con la precisión de la navegación. La actualización VOR no está autorizada en este momento. La tripulación de vuelo deberá cumplir con los procedimientos del operador para la inhibición de las instalaciones específicas. Confirmación del Procedimiento de aproximación. La tripulación de vuelo, deberá confirmar que el procedimiento correcto ha sido seleccionado. Este proceso incluye la confirmación de la secuencia de los puntos de recorrido, razonabilidad de ángulos de trayectoria y distancias, y cualquier otro parámetro que pueda ser alterado por el piloto, como la altitud o las limitaciones de velocidad. Un procedimiento no debe utilizarse si la validez de la base de datos de navegación está en duda. La pantalla del sistema de navegación de texto o pantalla de mapas de navegación deben ser utilizados.
Vigilancia de la desviación de trayectoria. Los pilotos deben utilizar un indicador de desviación lateral, director de vuelo y/o piloto automático en modo de navegación lateral en los procedimientos RNP AR APCH. Los pilotos de aeronaves con un indicador de desviación lateral deben garantizar que la escala del indicador de desviación lateral (la totalidad de la escala) es adecuada para la precisión de la navegación asociadas con los diversos segmentos del procedimiento RNP AR APCH. Se espera que
Fuente. http://secure.simmarket.com/ernie-alston-integrated-simavionics-group-1-(isg1).phtml
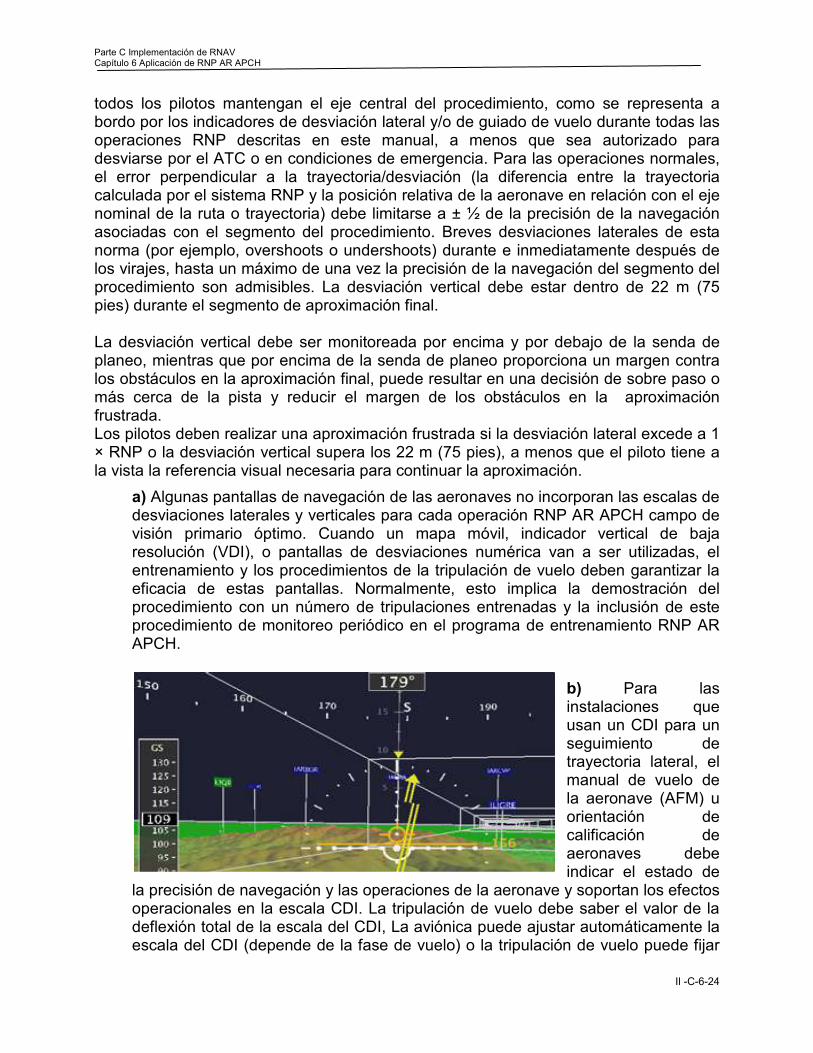
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-24
todos los pilotos mantengan el eje central del procedimiento, como se representa a bordo por los indicadores de desviación lateral y/o de guiado de vuelo durante todas las operaciones RNP descritas en este manual, a menos que sea autorizado para desviarse por el ATC o en condiciones de emergencia. Para las operaciones normales, el error perpendicular a la trayectoria/desviación (la diferencia entre la trayectoria calculada por el sistema RNP y la posición relativa de la aeronave en relación con el eje nominal de la ruta o trayectoria) debe limitarse a ± ½ de la precisión de la navegación asociadas con el segmento del procedimiento. Breves desviaciones laterales de esta norma (por ejemplo, overshoots o undershoots) durante e inmediatamente después de los virajes, hasta un máximo de una vez la precisión de la navegación del segmento del procedimiento son admisibles. La desviación vertical debe estar dentro de 22 m (75 pies) durante el segmento de aproximación final. La desviación vertical debe ser monitoreada por encima y por debajo de la senda de planeo, mientras que por encima de la senda de planeo proporciona un margen contra los obstáculos en la aproximación final, puede resultar en una decisión de sobre paso o más cerca de la pista y reducir el margen de los obstáculos en la aproximación frustrada. Los pilotos deben realizar una aproximación frustrada si la desviación lateral excede a 1 × RNP o la desviación vertical supera los 22 m (75 pies), a menos que el piloto tiene a la vista la referencia visual necesaria para continuar la aproximación.
a) Algunas pantallas de navegación de las aeronaves no incorporan las escalas de desviaciones laterales y verticales para cada operación RNP AR APCH campo de visión primario óptimo. Cuando un mapa móvil, indicador vertical de baja resolución (VDI), o pantallas de desviaciones numérica van a ser utilizadas, el entrenamiento y los procedimientos de la tripulación de vuelo deben garantizar la eficacia de estas pantallas. Normalmente, esto implica la demostración del procedimiento con un número de tripulaciones entrenadas y la inclusión de este procedimiento de monitoreo periódico en el programa de entrenamiento RNP AR APCH.
b) Para las instalaciones que usan un CDI para un seguimiento de trayectoria lateral, el manual de vuelo de la aeronave (AFM) u orientación de calificación de aeronaves debe indicar el estado de
la precisión de navegación y las operaciones de la aeronave y soportan los efectos operacionales en la escala CDI. La tripulación de vuelo debe saber el valor de la deflexión total de la escala del CDI, La aviónica puede ajustar automáticamente la escala del CDI (depende de la fase de vuelo) o la tripulación de vuelo puede fijar
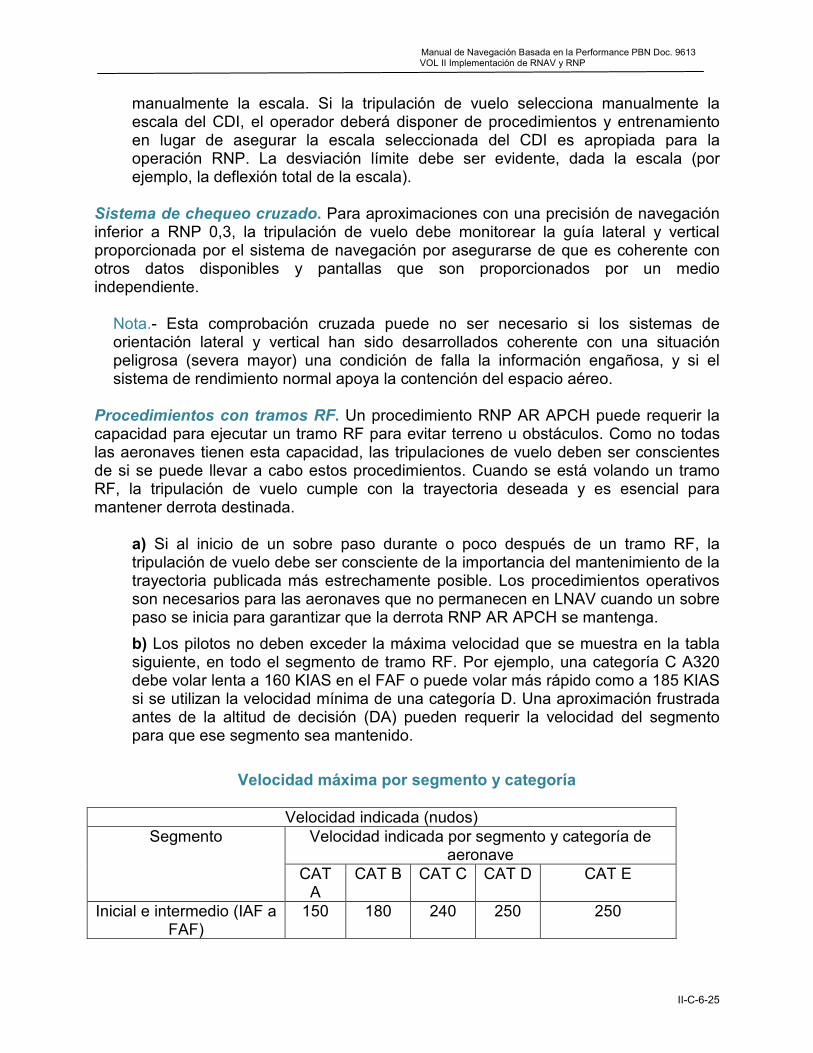
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-25
manualmente la escala. Si la tripulación de vuelo selecciona manualmente la escala del CDI, el operador deberá disponer de procedimientos y entrenamiento en lugar de asegurar la escala seleccionada del CDI es apropiada para la operación RNP. La desviación límite debe ser evidente, dada la escala (por ejemplo, la deflexión total de la escala).
Sistema de chequeo cruzado. Para aproximaciones con una precisión de navegación inferior a RNP 0,3, la tripulación de vuelo debe monitorear la guía lateral y vertical proporcionada por el sistema de navegación por asegurarse de que es coherente con otros datos disponibles y pantallas que son proporcionados por un medio independiente. Nota.- Esta comprobación cruzada puede no ser necesario si los sistemas de orientación lateral y vertical han sido desarrollados coherente con una situación peligrosa (severa mayor) una condición de falla la información engañosa, y si el sistema de rendimiento normal apoya la contención del espacio aéreo.
Procedimientos con tramos RF. Un procedimiento RNP AR APCH puede requerir la capacidad para ejecutar un tramo RF para evitar terreno u obstáculos. Como no todas las aeronaves tienen esta capacidad, las tripulaciones de vuelo deben ser conscientes de si se puede llevar a cabo estos procedimientos. Cuando se está volando un tramo RF, la tripulación de vuelo cumple con la trayectoria deseada y es esencial para mantener derrota destinada.
a) Si al inicio de un sobre paso durante o poco después de un tramo RF, la tripulación de vuelo debe ser consciente de la importancia del mantenimiento de la trayectoria publicada más estrechamente posible. Los procedimientos operativos son necesarios para las aeronaves que no permanecen en LNAV cuando un sobre paso se inicia para garantizar que la derrota RNP AR APCH se mantenga.
b) Los pilotos no deben exceder la máxima velocidad que se muestra en la tabla siguiente, en todo el segmento de tramo RF. Por ejemplo, una categoría C A320 debe volar lenta a 160 KIAS en el FAF o puede volar más rápido como a 185 KIAS si se utilizan la velocidad mínima de una categoría D. Una aproximación frustrada antes de la altitud de decisión (DA) pueden requerir la velocidad del segmento para que ese segmento sea mantenido.
Velocidad máxima por segmento y categoría
Velocidad indicada (nudos)
Velocidad indicada por segmento y categoría de aeronave
Segmento
CAT A
CAT B CAT C CAT D CAT E
Inicial e intermedio (IAF a FAF)
150 180 240 250 250
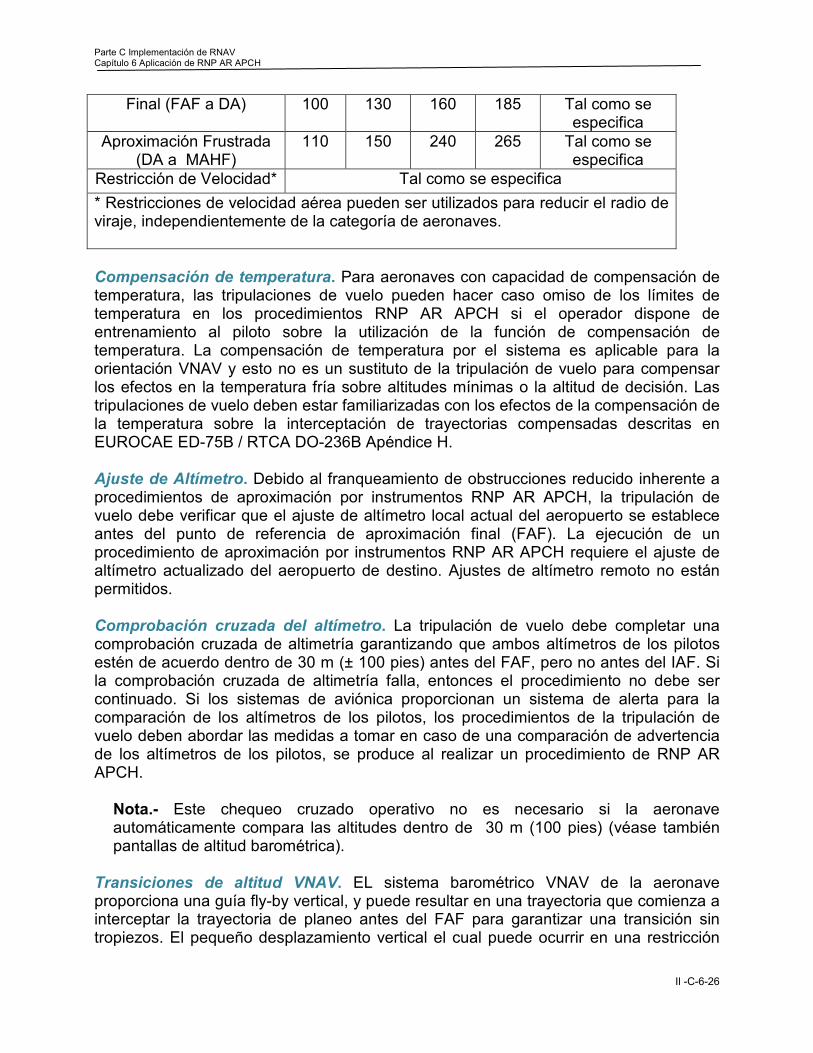
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-26
Final (FAF a DA) 100 130 160 185 Tal como se especifica
Aproximación Frustrada (DA a MAHF)
110 150 240 265 Tal como se especifica
Restricción de Velocidad* Tal como se especifica
* Restricciones de velocidad aérea pueden ser utilizados para reducir el radio de viraje, independientemente de la categoría de aeronaves.
Compensación de temperatura. Para aeronaves con capacidad de compensación de temperatura, las tripulaciones de vuelo pueden hacer caso omiso de los límites de temperatura en los procedimientos RNP AR APCH si el operador dispone de entrenamiento al piloto sobre la utilización de la función de compensación de temperatura. La compensación de temperatura por el sistema es aplicable para la orientación VNAV y esto no es un sustituto de la tripulación de vuelo para compensar los efectos en la temperatura fría sobre altitudes mínimas o la altitud de decisión. Las tripulaciones de vuelo deben estar familiarizadas con los efectos de la compensación de la temperatura sobre la interceptación de trayectorias compensadas descritas en EUROCAE ED-75B / RTCA DO-236B Apéndice H. Ajuste de Altímetro. Debido al franqueamiento de obstrucciones reducido inherente a procedimientos de aproximación por instrumentos RNP AR APCH, la tripulación de vuelo debe verificar que el ajuste de altímetro local actual del aeropuerto se establece antes del punto de referencia de aproximación final (FAF). La ejecución de un procedimiento de aproximación por instrumentos RNP AR APCH requiere el ajuste de altímetro actualizado del aeropuerto de destino. Ajustes de altímetro remoto no están permitidos. Comprobación cruzada del altímetro. La tripulación de vuelo debe completar una comprobación cruzada de altimetría garantizando que ambos altímetros de los pilotos estén de acuerdo dentro de 30 m (± 100 pies) antes del FAF, pero no antes del IAF. Si la comprobación cruzada de altimetría falla, entonces el procedimiento no debe ser continuado. Si los sistemas de aviónica proporcionan un sistema de alerta para la comparación de los altímetros de los pilotos, los procedimientos de la tripulación de vuelo deben abordar las medidas a tomar en caso de una comparación de advertencia de los altímetros de los pilotos, se produce al realizar un procedimiento de RNP AR APCH.
Nota.- Este chequeo cruzado operativo no es necesario si la aeronave automáticamente compara las altitudes dentro de 30 m (100 pies) (véase también pantallas de altitud barométrica).
Transiciones de altitud VNAV. EL sistema barométrico VNAV de la aeronave proporciona una guía fly-by vertical, y puede resultar en una trayectoria que comienza a interceptar la trayectoria de planeo antes del FAF para garantizar una transición sin tropiezos. El pequeño desplazamiento vertical el cual puede ocurrir en una restricción
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-27
vertical (por ejemplo, el FAF es considerado operacionalmente aceptable, y conveniente, a fin de garantizar una asíntota captura de un nuevo (próximo) segmento vertical. Esta momentánea desviación por debajo de la altitud mínima del procedimiento publicado es aceptable siempre que la desviación está limitada a no más de 30 m (100 pies) y es el resultado de una captura normal VNAV. Esto se aplica tanto a segmentos "nivel de despegue" o " altitud adquirida " siguiendo un ascenso o descenso, o ascenso vertical o iniciación del segmento de descenso, o la unión de las trayectorias de ascenso o descenso con diferentes gradientes. Nota adicional del traductor: "Asíntota (del idioma griego: σύµπτωτος — asýmptōtos— „aquello que no cae “palabra formada a partir del verbo συµπίπτειν sympiptein “caer-con“ ) Una asíntota es una línea recta que puede ser horizontal, vertical u oblicua a la que se aproxima una curva como gráfica de determinada función.""Las asíntotas son rectas a las cuales la función se va aproximando indefinidamente, cuando por lo menos una de las variables (x o y) tienden al infinito.( http://es.wikipedia.org/wiki/As%C3%ADnto)... Gradiente de ascenso no estándar. Cuando el operador tiene previsto utilizar la DA asociada a una gradiente de ascenso de aproximación frustrada no estándar, se debe garantizar que la aeronave será capaz de cumplir con la gradiente de ascenso publicada para la carga prevista del avión, las condiciones atmosféricas y los procedimientos operativos antes de realizar la operación. Cuando los operadores tienen especialistas de rendimiento quienes determinan si la aeronave puede cumplir con la gradiente de ascenso publicada, esta información debe proporcionarse a los pilotos que indicando el gradiente de ascenso que pueden esperar alcanzar. Procedimientos de un motor inoperativo. La aeronave puede demostrar un error técnico de vuelo aceptable con un motor inoperante para llevar a cabo un procedimiento RNP AR APCH. En caso contrario, se espera que las tripulaciones de vuelo tomen las medidas adecuadas en caso de un fallo de motor durante una aproximación, a fin de que ninguna aeronave requiera una cualificación específica. La calificación de la aeronave podría identificar cualquier límite de performance en caso de fallo de motor para soportar la definición de los apropiados procedimientos de la tripulación de vuelo. Se debe prestar especial atención a los procedimientos publicados con gradientes de ascenso no estándar. Sobre paso o aproximación frustrada. Cuando sea posible, la aproximación frustrada requerirá RNP 1.0. Parte de la aproximación frustrada de estos procedimientos es similar a la aproximación frustrada de una aproximación RNP APCH. En caso necesario, la precisión de navegación menos de RNP 1.0 se utilizará en la aproximación frustrada. La aprobación para llevar a cabo estas aproximaciones, equipo y procedimientos deben cumplir con los criterios de "Requisitos para aproximaciones con aproximación frustrada menos de RNP 1.0”. En muchos aviones cuando ejecutan un sobre paso o una aproximación frustrada, activando take-off/go-around (TOGA) puede causar un cambio en la navegación lateral, es decir, TOGA desactivada el piloto automático y director de vuelo en guía LNAV, el
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-28
director de vuelo revierte a mantener la trayectoria derivada del sistema inercial. En estos casos, la guía LNAV para el director de vuelo y piloto automático debe ser re-enganchada tan pronto como sea posible. Los procedimientos de la tripulación de vuelo y el entrenamiento deben tener en cuenta el impacto sobre la capacidad de navegación y la orientación del vuelo si el piloto inicia un sobre paso mientras la aeronave se encuentra en un viraje. Cuando se inicia un pronto sobre paso, la tripulación de vuelo debería seguir el resto de la trayectoria de aproximación y trayectoria de aproximación frustrada a menos que el ATC haya emitido una autorización diferente. La tripulación de vuelo debe ser conscientes de que los tramos RF son diseñados sobre la base de la máxima velocidad verdadera y altitud normal, e iniciando un pronto sobre paso reducirá el margen de maniobrabilidad y potencialmente incluso al hacer una espera el viraje impráctico en la velocidad de aproximación frustrada. Tras la pérdida de las actualizaciones de los GNSS, la orientación RNAV puede comenzar a "costa" sobre IRU, si está instalado, y la deriva, degradando la posición de la solución de navegación. Así, cuando las operaciones de aproximación frustrada RNP AR APCH dependen de la IRU "estancia costera", la orientación inercial sólo puede proporcionar orientación RNP para una cantidad especificada de tiempo. Procedimientos de contingencia -, fallas mientras se está en ruta. La capacidad RNP de la aeronave es dependiente del equipamiento operativo de la aeronave y los GNSS. La tripulación de vuelo debe ser capaz de evaluar el impacto de la falla del equipo RNP AR APCH previsto y adoptar las medidas apropiadas. Como se describe en el " Evaluación de la Ejecución RNP ", también la tripulación de vuelo debe ser capaz de evaluar el impacto de los cambios en la constelación GNSS y tomarán las medidas apropiadas. Procedimientos de contingencia – falla en la aproximación. Los procedimientos de contingencia del operador necesitan abordar al menos las siguientes condiciones: Falla de los componentes del sistema RNP, incluidos los que afectan la desviación de rendimiento lateral y vertical (por ejemplo, las fallas de un sensor GPS, el director de vuelo o piloto automático), y la pérdida de la señal de navegación en el espacio (la pérdida o degradación de la señal externa).
Pilotos / despachadores / conocimiento del operador y el entrenamiento
El operador deberá facilitar el entrenamiento para el personal clave (por ejemplo, los miembros de la tripulación de vuelo y despachadores) en el uso y aplicación de procedimientos RNP AR APCH. Una comprensión profunda de los procedimientos operacionales y las mejores prácticas son críticas para la operación segura de las aeronaves durante las operaciones RNP AR APCH. Este programa debe proporcionar suficiente detalle sobre la navegación de la aeronave y sistemas de control de vuelo para permitir a los pilotos identificar los fallos que afectan la capacidad RNP de la aeronave y los procedimientos de emergencia /anormales. El entrenamiento debe
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-29
incluir tanto el conocimiento y la habilidad de las obligaciones y evaluaciones de los miembros de la tripulación y los despachadores. Responsabilidades del operador
a) Cada operador es responsable del entrenamiento de las tripulaciones de vuelo para las operaciones específicas RNP AR APCH ejercidas por el operador. El operador debe incluir el entrenamiento sobre los distintos tipos de procedimientos RNP AR APCH y equipo necesario. El entrenamiento debe incluir la discusión de los requisitos reglamentarios de RNP AR APCH. El operador deberá incluir estos requisitos y los procedimientos en sus operaciones de vuelo y manuales de capacitación (según proceda). Este material debe cubrir todos los aspectos de las operaciones RNP AR APCH del operador incluyendo la autorización operacional aplicable (por ejemplo, las especificaciones de las operaciones). Una persona debe haber completado el entrenamiento en tierra y en vuelo o una serie de sesiones antes de participar en operaciones RNP AR APCH.
b) los segmentos de entrenamiento de vuelo debe incluir la capacitación y módulos de control representativo del tipo de operaciones RNP AR APCH que el operador lleva a cabo durante la línea orientada a las actividades de vuelo. Muchos operadores pueden entrenar para procedimientos RNP AR APCH bajo los estándares de entrenamiento establecidos y las disposiciones de programas de calificación avanzadas (AQP). Ellas pueden llevar a cabo las evaluaciones en los escenarios de línea de vuelo orientado al entrenamiento (LOFT), (line-oriented flight training) los escenarios de eventos de entrenamiento seleccionados (SET), (selected event training) o en una combinación de ambos. El operador podrá realizar módulos de entrenamiento de vuelo requeridos en dispositivos de entrenamiento de vuelo, simuladores de aviones, y otros dispositivos de mejora del entrenamiento, siempre y cuando estos dispositivos de entrenamiento reproduzcan con exactitud el equipo del operador y operaciones RNP AR APCH.
c) Los operadores deben tener en cuenta el entrenamiento inicial RNP AR APCH y las cualificaciones durante el entrenamiento inicial, de transición, de actualización, recurrentes, las diferencias, o entrenamiento independiente y programas de cualificación en la respectiva categoría de cualificación. Los estándares de evaluación de la calificación de la capacidad de cada piloto para comprender y utilizar adecuadamente los procedimientos RNP AR APCH (evaluación inicial RNP AR APCH). El operador también debe desarrollar normas de calificación periódicos a fin de garantizar su adecuado mantenimiento del conocimiento teóricos y prácticos de las tripulaciones de vuelo RNP AR APCH (calificaciones periódicas de RNP AR APCH).
d) Los operadores podrán orientar operaciones RNP AR APCH temas por separado o integrados con otros elementos de planes de estudios. Por ejemplo, una cualificación RNP AR APCH de la tripulación de vuelo puede centrarse en una aeronave específica durante la transición, actualización, o diferentes cursos. El entrenamiento general podrá abordar también calificación RNP AR APCH, por ejemplo, durante el entrenamiento periódico o eventos de control recurrente, tales como chequeos de pro eficiencia periódicos/entrenamiento de pro eficiencia, línea
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-30
orientada a evaluación operacional o con fines especiales de formación. Un separado o independiente programa de cualificación RNP AR APCH pueden también abordar la formación RNP AR APCH, por ejemplo por la realización de un currículo de formación especial RNP AR APCH del operador en un centro o una base de tripulación designada.
e) la intención de los operadores de recibir crédito para el entrenamiento de RNP, cuando su programa propuesto se basa en la anterior formación (por ejemplo, IAP's RNP Especial), debe recibir autorización específica de sus principales inspectores de operaciones/inspector de operaciones de vuelo. Además del actual programa de formación RNP, la compañía aérea deberá para proporcionar el entrenamiento de diferencias entre el programa de capacitación existente y los requisitos de entrenamiento RNP AR APCH.
f) La formación de los despachadores de vuelo deberá incluir: La explicación de los diferentes tipos de procedimientos RNP AR APCH, la importancia de determinados equipos de navegación y otros equipos durante las operaciones RNP AR APCH y los requisitos reglamentarios RNP AR APCH y los procedimientos. Los manuales de capacitación y procedimientos del despachador deben incluir estos requisitos (según proceda). Este material debe cubrir todos los aspectos de las operaciones RNP AR APCH del operador incluyendo las autorizaciones (por ejemplo, especificaciones de operaciones, manual de operaciones, o MSpecs LOA).Una persona debe haber completado el curso de capacitación adecuada antes de iniciar operaciones RNP AR APCH. Además, la formación del despachador deben tener en cuenta la forma de determinar: la disponibilidad RNP AR APCH (teniendo en cuenta la capacidad de los equipos de a bordo), requisitos MEL, el rendimiento de los aviones, y la disponibilidad de las señales de navegación (por ejemplo, GPS RAIM / herramienta de capacidad predictiva RNP) para los aeropuertos de destino y de alternativa.
Capacitación en tierra y contenido de los segmentos Los segmentos de entrenamiento en tierra deben abordar los siguientes temas, como módulos de entrenamiento, en un programa de formación académica RNP AR APCH aprobado durante la introducción inicial de un miembro de la tripulación para sistemas y operaciones RNP AR APCH. Para los programas recurrentes, el plan de estudios sólo necesita revisión inicial y abordar los nuevos requisitos del currículo, revisada, o enfatizada en los temas. Conceptos generales de la operación RNP AR APCH. El entrenamiento académico RNP AR APCH debe cubrir teoría de los sistemas RNP AR APCH a la medida adecuada para garantizar el correcto uso operativo. Las tripulaciones de vuelo deben entender los conceptos básicos de los sistemas de operación RNP AR APCH, clasificaciones, y limitaciones. El entrenamiento debe incluir el conocimiento general y la aplicación operacional de los procedimientos de aproximación por instrumentos. RNP AR APCH. Este modulo de capacitación debe abordar los siguientes elementos:
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-31
a) definición de la RNP AR APCH;
b) las diferencias entre RNAV y RNP;
c) los tipos de procedimientos RNP AR APCH y familiaridad con la cartografía de estos procedimientos;
d) la programación y pantallas RNP y las pantallas específicas de las aeronaves (por ejemplo, Performance de Navegación Actual (pantalla ANP);
e) la forma de cómo habilitar y deshabilitar la actualización de los modos de navegación relacionadas con la RNP;
f) la precisión de la navegación adecuada para las diferentes fases de vuelo y procedimientos RNP AR APCH y cómo seleccionar la precisión de la navegación, si es necesario;
g) la utilización del GPS RAIM (o equivalente) y las previsiones de los efectos sobre la disponibilidad del RAIM de los procedimientos RNP AR APCH (la tripulación de vuelo y despachadores);
h) cuando y como poner fin a la navegación RNP y la transferencia a la navegación tradicional debido a la pérdida de la RNP y/o equipo necesario;
i) como determinar la vigencia de la base de datos y si contiene los datos de navegación necesaria para el uso de los puntos de recorrido GNSS;
j) la explicación de los diferentes componentes que contribuyen al error total del sistema y sus características (por ejemplo, efecto de la temperatura en baro-VNAV y las características de la deriva cuando se utiliza el IRU sin la actualización de radio).
k) la compensación de la temperatura - las tripulaciones de vuelo que operan los sistemas de aviónica, con una compensación de errores de altimetría introducidas por las desviaciones de la ISA podrá no tener en cuenta los límites de temperatura en procedimientos RNP AR APCH, si el entrenamiento del piloto sobre el uso de la función de compensación de la temperatura es proporcionada por el operador y la función de compensación es utilizada por la tripulación. Sin embargo, el entrenamiento también debe reconocer la compensación de temperatura por el sistema y es aplicable a la orientación VNAV y no es un sustituto de las compensaciones de la tripulación de vuelo para los efectos de la temperatura fría sobre altitudes mínima o la altitud de decisión.
Comunicación ATC y la coordinación para el uso de la RNP AR APCH. El entrenamiento en tierra debe instruir a las tripulaciones de vuelo sobre una clasificación apropiada de plan de vuelo y cualquier procedimiento aplicable al control del tránsito aéreo (ATC) para operaciones RNP AR APCH. La tripulación de vuelo debe recibir instrucciones sobre la necesidad de avisar inmediatamente al ATC cuando el desempeño del sistema de navegación de la aeronave ya no es adecuado para apoyar la continuación de un procedimiento de RNP AR APCH. Las tripulaciones de vuelo
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-32
deben también saber que los sensores de navegación de la base de un cumplimiento RNP AR APCH, y deben ser capaz de evaluar el impacto de un fallo de cualquier aviónica o de un conocimiento de la pérdida de los sistemas de tierra sobre el resto del vuelo plan. Componentes del equipo, controles, indicadores y alertas de RNP AR APCH. La formación académica debe incluir una discusión de la terminología RNP, simbología, funcionamiento, control operacional, y elementos de las pantallas, incluyendo cualquier tema único para la implementación de un operador o sistemas. La capacitación debe abordar las alertas aplicables a las fallas y limitaciones de equipo. La tripulación de vuelo y los despachadores deben lograr una comprensión profunda de los equipos utilizados en las operaciones RNP y cualquier limitación sobre el uso de los equipos durante estas operaciones. Información del AFM y procedimientos operativos. El AFM u otras pruebas de elegibilidad de las aeronaves debe abordar los procedimientos operativos normales y anormales de la tripulación de vuelo, las respuestas a las alertas de fallas, y cualquier limitación de sus equipos, incluida la información sobre los modos de operación de la RNP. La formación también debe abordar los procedimientos de contingencia para la pérdida o degradación de la capacidad de la RNP. Los manuales de operaciones de vuelo aprobados para su uso por las tripulaciones de vuelo (por ejemplo, los manuales de operaciones de vuelo (FOM) o manual de operación del piloto (POH)) debe contener esta información. Disposiciones operativas del MEL. Las tripulaciones de vuelo deben tener una comprensión profunda de los requisitos de la MEL en apoyo a las operaciones RNP AR APCH. Contenido de los segmentos de entrenamiento de Vuelo. Los Programas de entrenamiento deben cubrir la correcta ejecución de los procedimientos RNP AR APCH, conjuntamente con la documentación OEM. El entrenamiento operativo debe incluir: procedimientos y limitaciones RNP AR APCH; normalización de la configuración de las pantallas electrónicas de la cabina durante un procedimiento RNP AR APCH, el reconocimiento de las advertencias sonoras, alertas y otros anuncios que pueden afectar el cumplimiento de un procedimiento RNP AR APCH, y la oportuna y correcta respuesta a la pérdida de la capacidad RNP AR APCH en una variedad de escenarios, que abarca el ámbito de aplicación de los procedimientos RNP AR APCH que el operador tiene previsto completar. Esta formación también puede utilizar los dispositivos de entrenamiento de vuelo aprobado en o simuladores. Este entrenamiento debe abordar los siguientes elementos específicos:
a) Procedimientos para la verificación de que cada altímetro del piloto tiene la configuración actual antes de comenzar la aproximación final de un procedimiento RNP AR APCH, incluyendo cualquier limitación operacional asociada con la fuente
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-33
(s) para los ajustes de altímetro y es latente estado de la comprobación y ajuste de los altímetros en la aproximación en el FAF.
b) La utilización del radar de la aeronave, TAWS, GPWS, u otros sistemas de aviónica en apoyo a la vigilancia de la trayectoria de la tripulación de vuelo y tiempo para evitar obstáculos.
c) El efecto del viento en el rendimiento de la aeronave durante la ejecución de procedimientos RNP AR APCH y la necesidad de permanecer dentro del área de retención RNP, incluida cualquier limitación operativa de viento y configuración esencial de la aeronave para completar con seguridad un procedimiento RNP AR APCH.
d) El efecto de la velocidad de tierra sobre el cumplimiento de procedimientos RNP AR APCH y restricciones del ángulo de banqueo que afectan la capacidad de permanecer en el curso central para procedimientos RNP AR APCH, se espera que las aeronaves mantengan la velocidad estándar asociada a la categoría aplicable.
e) La relación entre RNP y los adecuados mínimos operacionales aprobados del procedimiento de aproximación RNP AR APCH publicada, y cualquier limitación operativa de degradación RNP, si está o no dispone antes de una aproximación (se deben incluir los procedimientos de la tripulación de vuelo fuera del FAF versus dentro del FAF).
f) Reuniones informativas concisas y completas de la tripulación de vuelo para todos los procedimientos RNP AR APCH y el papel importante de la gestión de los recursos cabina (CRM) desempeña con éxito en un procedimiento RNP AR APCH.
g) Las alertas desde la carga y el uso inadecuado de la precisión de los datos de navegación para un segmento deseado de un procedimiento RNP AR APCH.
h) Los requisitos de rendimiento para acoplar el piloto automático/director de vuelo para el sistema de guiado de navegación lateral de procedimientos RNP AR APCH requieren un valor RNP menor de RNP 0.3.
i) La importancia de la configuración de la aeronave para garantizar que la aeronave mantiene cualquier velocidad requerida durante el procedimiento RNP AR APCH.
j) Los acontecimientos que dé lugar a una aproximación frustrada cuando se utiliza la capacidad RNP de las aeronaves.
k) Cualquier restricción de ángulo de banqueo o limitación en el procedimiento RNP AR APCH.
l) El efecto potencial perjudicial sobre la capacidad para cumplir con un procedimiento RNP AR APCH cuando la reducción de los ajustes de flaps, reduciendo el ángulo de banqueo o aumentando la velocidad.
m) el conocimiento de la tripulación de vuelo y las destrezas necesarias para realizar correctamente las operaciones RNP AR APCH.
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-34
n) La programación y el funcionamiento de la FMC, piloto automático, throttles automático, radar, GPS, INS, EFIS (incluyendo mapas móviles), y TAWS en apoyo de procedimientos RNP AR APCH.
o) El efecto de la activación del TOGA, mientras que en un viraje.
p) vigilancia del FTE y el impacto sobre la decisión de un sobre paso y operación.
q) Pérdida del GNSS durante un procedimiento.
r) Las cuestiones de performance relacionadas con la reversión y la radio actualización y limitaciones sobre el uso de actualización DME y VOR.
s) Procedimientos de contingencia de la tripulación de vuelo para una pérdida de capacidad RNP durante una aproximación frustrada. Debido a la falta de guía de navegación, la formación debería enfatizar las acciones en las contingencias de la tripulación de vuelo para lograr la separación con el terreno y obstáculos. El operador debe adaptar estos procedimientos de contingencia para sus procedimientos específicos RNP AR APCH.
t) Como mínimo, cada piloto debe completar dos procedimientos de aproximación RNP que emplean la única características de los procedimientos aprobados RNP AR APCH del operador (es decir, tramos RF y una aproximación frustrada RNP). Un procedimiento debe culminar en una transición para aterrizaje y un procedimiento debe culminar en la realización de un procedimiento de aproximación frustrada RNP.
Módulo de evaluación Evaluación inicial de los conocimientos de un procedimiento RNP AR APCH. El operador debe evaluar a cada uno de los miembros de la tripulación de vuelo el conocimiento de procedimientos RNP AR APCH antes de emplear un procedimiento RNP AR APCH. Como mínimo, la revisión debe incluir una evaluación a fondo de los procedimientos del piloto y los requisitos específicos de los rendimientos de las aeronaves para operaciones RNP AR APCH. Un medio aceptable para esta evaluación inicial incluye una de las siguientes:
a) una evaluación por un instructor/evaluador autorizado o piloto chequeador usando un simulador aprobado o dispositivo de formación;
b) una evaluación por un instructor /evaluador autorizado o piloto chequeador durante las operaciones de línea, los vuelos de entrenamiento, verificaciones de competencia, las pruebas prácticas de eventos, la experiencia operativa, los chequeos de ruta, y/o chequeos de lineo, o
c) Programas de entrenamiento de vuelo orientado a la línea (LOFT line-oriented flight training)/ evaluación orientada a línea (LOE) utilizando un simulador aprobado que Incorpora las operaciones RNP que emplean las única características RNP AR APCH (es decir, tramos RF, aproximación frustrada RNP) de los procedimientos aprobados por los operadores
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-35
Contenido de la Evaluación. Elementos específicos que deben ser abordados en este módulo de evaluación son los siguientes:
a) demostrar el uso de cualquier límite RNP que pueden tener repercusiones distintas con las RNP AR APCHs;
b) demostrar la aplicación de la radio actualización de los procedimientos, tales como habilitar y deshabilitar la radio actualización de la FMC basadas en ayudas de base terrestre (es decir, actualización de DME/DME y VOR/DME) y el conocimiento de cuándo se utiliza esta característica. Si la aviónica de la aeronave no incluye la capacidad para desactivar la radio actualización, entonces la formación debe garantizar que la tripulación de vuelo es capaz de llevar a cabo las acciones operativas que mitiguen la falta de esta característica;
c) demostrar su capacidad para monitorear la actual trayectoria lateral y vertical para las trayectorias de vuelo programadas y completar el procedimiento de la tripulación de vuelo apropiado, cuando excedan un límite lateral o vertical FTE;
d) demostrar la capacidad de leer y adaptarse a una previsión RAIM (o equivalente), incluidas las previsiones de la predicción de una falla de disponibilidad RAIM;
e) demostrar la configuración apropiada del FMC, los radares meteorológicos, TAWS, y mapas de movimiento para las distintas operaciones y escenarios RNP AR APCH y que el operador tiene previsto aplicar;
f) demostrar el uso de las reuniones informativas de la tripulación de vuelo, y listas de chequeo para las operaciones RNP AR APCH con énfasis en CRM;
g) demostrar el conocimiento y capacidad para realizar un procedimiento RNP AR APCH y una aproximación frustrada en una variedad de escenarios operativos (es decir, pérdida o la falla de la navegación para adquirir condiciones visuales);
h) demostrar el control de la velocidad durante los segmentos que requieren restricciones de velocidad para garantizar el cumplimiento de un procedimiento RNP AR APCH;
i) demostrar el uso competente de las placas RNP AR APCH, fichas informativas, y listas de chequeo;
J) demostrar la capacidad para completar un ángulo banqueo estable RNP AR APCH, control de velocidad, y permanecer en el eje central del procedimiento, y
K) conocimiento de los límites operacionales de la desviación por debajo de la trayectoria de vuelo deseada en un RNP AR APCH y cómo monitorear precisamente la posición relativa de la aeronave en relación con la trayectoria de vuelo vertical.
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-36
Entrenamiento periódico El operador debe incorporar un entrenamiento periódico RNP que emplee las características únicas de aproximación (AR) de los procedimientos aprobados por los operadores como parte del programa general. Un mínimo de dos RNP AR APCH deberán ser volados por cada piloto para cada posición (piloto que vuela y piloto que monitorea), con un aterrizaje completo y una aproximación frustrada completa, y puede ser sustituida por cualquier requisito "de precisión, como" aproximación. NOTA.- Una aproximación RNP equivalente puede ser acreditados para este requisito.
BASE DE DATOS DE NAVEGACIÓN El procedimiento almacenado en la base de datos de navegación define la guía lateral y vertical. Las actualizaciones de la base de datos de navegación se producen cada 28 días, y los datos de navegación en cada actualización son críticos para la integridad de cada operación RNP AR APCH. Dada la reducción de franqueamientos de obstáculos asociados a estos procedimientos, la validación de los datos de navegación merece una especial consideración. En esta sección se ofrece orientación para los procedimientos del operador para la validación de los datos de navegación asociados con la RNP AR APCH. Proceso de datos El operador debe identificar el administrador responsable para el proceso de actualización de los datos de dentro de sus procedimientos. El operador deberá documentar un proceso de aceptación, verificación y carga de los datos de navegación en la aeronave. El operador deberá colocar su proceso de datos documentados bajo un control de configuración. Validación inicial de datos. El operador deberá validar cada procedimiento RNP AR APCH antes de volar el procedimiento en IMC para garantizar la compatibilidad con sus aviones y para garantizar la trayectoria de acceso resultante y que coincide con el procedimiento publicado. Como mínimo, el operador deberá:
a) comparar los datos de navegación para el procedimiento (s) a ser cargados dentro del sistema de gestión de vuelo con el procedimiento publicado;
b) validar la carga de los datos de navegación para el procedimiento, ya sea en un simulador o en el propio avión en condiciones meteorológicas de vuelo visual (VMC). El procedimiento se muestra en la pantalla de mapas y debe ser
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-37
comparado con el procedimiento publicado. El procedimiento completo deberá ser volado para garantizar que la trayectoria no tiene ninguna aparente desconexión lateral o vertical, y es coherente con el procedimiento publicado, y
c) una vez que se valida el procedimiento, retener y mantener una copia de la validación de datos de navegación para realizar una comparación con las posteriores actualizaciones de datos.
Actualizaciones de datos. Tras la recepción de cada actualización de los datos de navegación, y antes de utilizar los datos de navegación en la aeronave, el operador deberá comparar la actualización para el procedimiento validado. Esta comparación debe identificar y resolver cualquier discrepancia en los datos de navegación. Si existen cambios significativos (cualquier cambio que afecte la trayectoria de aproximación o el rendimiento) a cualquier parte de un procedimiento y verifica la fuente de los cambios en los datos, el operador deberá validar el procedimiento modificado de conformidad con la validación de los datos iniciales. Proveedores de datos. Los proveedores de datos deben tener una carta de aceptación (LOA) para el procesamiento de los datos de navegación (por ejemplo, FAA AC 20 153, Condiciones para la emisión de cartas de aceptación para proveedores de datos de navegación por la Agencia EASA, o equivalente). Una LOA reconoce el proveedor de datos como uno cuya calidad de los datos, la integridad y las prácticas de gestión de calidad están en consonancia con los criterios de DO-200A/ED-76. El proveedor del operador (por ejemplo, la empresa FMS) deben tener una LOA tipo 2, y sus respectivos proveedores deben tener una LOA Tipo 1 o 2. Modificaciones de Aviones. Si un sistema de aeronave requerido para la RNP AR APCH se modifica (por ejemplo, cambio de software), el operador es responsable para la validación de procedimientos RNP AR APCH utilizando la base de datos de navegación y el sistema modificado. Esto puede realizarse sin ningún tipo de evaluación directa del fabricante si se comprueba que la modificación no tiene efecto sobre la base de datos de navegación o cálculo de trayectorias. Si no hay garantía del fabricante y no está disponible, el operador deberá realizar una primera validación de datos utilizando el sistema modificado.
SUPERVISIÓN DE LOS OPERADORES
Una autoridad reguladora podrá considerar cualquier informe de anomalía en la determinación de las medidas correctivas. Repetidos errores de navegación atribuidos a una pieza específica del equipo de navegación puede resultar en la cancelación de la autorización para uso de dicho equipo. La información que indica el potencial de errores repetidos puede requerir una modificación en el programa de formación del operador. La información que se atribuye a múltiples errores de un piloto en particular de la tripulación puede requerir entrenamiento correctivo o revisión de la licencia.
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-38
Los operadores deben tener un programa de monitoreo de la RNP para garantizar el continuo cumplimiento con las directrices de este capítulo y para identificar cualquier tendencia negativa en el rendimiento. Como mínimo, este programa debe abordar la siguiente información. Durante la aprobación provisional, los operadores deberán presentar la siguiente información cada 30 días a la autoridad de concesión de su autorización. Posteriormente, los operadores deben seguir para recopilar y revisar periódicamente estos datos a fin de determinar el potencial de seguridad, así como mantener los resúmenes de estos datos:
a) Un número total de procedimientos RNP AR APCH llevadas a cabo;
b) número de aproximaciones satisfactorias por aeronaves y sistemas (satisfactorias si se completaron como se planearon, sin ningún tipo de anomalía de navegación o del sistema de orientación);
c) razones para aproximaciones insatisfactorias, tales como:
I) Incapaz REQ NAV PERF, NAV ACCUR DOWNGRAD, u otros mensajes RNP durante las aproximaciones;
II) desviación lateral o vertical excesiva;
III) Advertencias TAWS;
IV) la desconexión del sistema del piloto automático;
V) errores de los datos de navegación, y
VI) informe del piloto de cualquier anomalía;
d) comentarios de la tripulación.
EVALUACIÓN DE LA SEGURIDAD
Evaluación de la seguridad operacional de vuelo El objetivo de seguridad para las operaciones RNP AR APCH es proporcionar seguridad para las operaciones de vuelo. Tradicionalmente, la seguridad operacional ha sido definida por un nivel de seguridad perseguido y se especifica como un riesgo de colisión de 10-7 por aproximación. Para una evaluación RNP AR APCH de la seguridad operacional de vuelo (FOSA) Flight Operational Safety Assessment) la metodología es utilizada. La FOSA se destina a proporcionar un nivel de seguridad de vuelo que es equivalente a la tradicional TLS, pero utilizando la metodología orientada a la performance de operaciones basada en vuelo. Usando el FOSA, el objetivo de seguridad operacional se cumple al considerar más el solo sistema de navegación de la aeronave. FOSA combina el análisis cuantitativos y cualitativos y las evaluaciones de los sistemas de navegación, los sistemas de la aeronave, procedimientos operativos, los peligros, la mitigación de las fallas, condiciones normales, casi normales y anormales, los peligros, y el entorno operativo. La FOSA depende de los criterios
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-39
detallados para la cualificación de aeronaves, aprobación del operador, y diseño de procedimiento instrumentales dirigidos a la mayoría de técnicas generales, procedimentales y los factores de procesamiento. Además, la experiencia técnica y operativa y la experiencia son esenciales para la conducta y conclusión de la FOSA. Una visión general de los riesgos y mitigaciones se prestan para ayudar a los Estados en la aplicación de estos criterios. Seguridad de las operaciones RNP AR APCH recae en el operador y el proveedor de servicios de navegación aérea, tal como se describe en este capítulo. Una FOSA debe llevarse a cabo para procedimientos RNP AR APCH donde las características específicas de las aeronaves, medio ambiente operacional, medio ambiente de obstáculos, etc., merecen un examen adicional para garantizar la seguridad de las operaciones y si siguen siendo objetivos alcanzados. La evaluación debería prestar la debida atención a la interdependencia de los elementos de diseño, capacidad de las aeronaves procedimientos de la tripulación y el entorno operativo Condiciones de peligro Las siguientes condiciones de riesgo son ejemplos de alguno de los más importantes riesgos y mitigación dirigidos por aeronaves específicas y los criterios operativos y de procedimiento de esta especificación de navegación. Dónde los requisitos operacionales resultan en un cambio o ajuste de los criterios del procedimiento RNP AR APCH, requisitos de los aviones o procedimientos de la tripulación, una única FOSA debe llevarse a cabo. Para facilitar la discusión de las condiciones de riesgo, es necesario en primer lugar diferenciar entre rendimiento normal y casi normal o anormal. En este contexto, se aplicarán las siguientes definiciones: Rendimiento normal: Lo lateral y vertical son abordados en los requisitos de las aeronaves, aeronaves y sistemas funcionan normalmente en configuraciones estándar y modos de funcionamiento, y los componentes individuales de error son monitoreados/truncados por el diseño del sistema o procedimiento de la tripulación. Rendimiento Casi normal y anormal: La precisión lateral y vertical es evaluada por las fallas de las aeronaves, como parte de la determinación de la calificación de las aeronaves. Además, otras condiciones de fallas casi normales y anormales para las operaciones ATC, los procedimientos de la tripulación, infraestructura de ayudas a la navegación y el entorno operativo son también evaluadas. Cuando el fallo o condición resulta no ser aceptable para continuar la operación, se desarrollaron mitigaciones o limitaciones establecidas para la aeronave, la tripulación y/o operación. 1. Fallo del sistema: Falla de un sistema de navegación, sistema de guiado de vuelo, sistema de instrumentos de vuelo para la aproximación, aproximación frustrada o de salida (por ejemplo, la pérdida de la actualización de los GNSS, falla del receptor,
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-40
desconexión de piloto automático, falla del FMS, etc.) Dependiendo de la aeronave, esto puede ser dirigido a través de diseño las aeronaves o de procedimientos operativos para la comprobación cruzada de la guía (por ejemplo, equipo doble para errores laterales, el uso de conciencia de terreno y sistemas de alerta (TAWS)). 2. Mal funcionamiento de sistemas de datos de altimetría: el chequeo cruzado procedimiento de la tripulación entre los dos sistemas independientes mitiga este riesgo. Rendimiento de Aeronaves 1. Rendimiento insuficiente para llevar a cabo la aproximación: la cualificación de la aeronave y los procedimientos operativos aseguran el rendimiento que es el adecuado en cada aproximación, como parte de la planificación de los vuelos y con el fin de iniciar o continuar la aproximación. Debería considerarse la posibilidad de configuración de las aeronaves durante la aproximación y cualquier cambio de configuración asociado con él sobre paso (por ejemplo, fallo de motor, retracción de flap). 2. Pérdida del motor: la pérdida de un motor mientras se lleva a cabo una aproximación RNP AR APCH es un fenómeno poco frecuente debido a la alta fiabilidad de los motores y el corto tiempo de exposición. Los operadores adoptaran medidas apropiadas para mitigar los efectos de la pérdida de motor, iniciando un sobre paso y tomando el control manual de la aeronave, si es necesario. Servicios de navegación 1. El uso de una ayuda para la navegación fuera de la cobertura designada o en modo de prueba: Los requisitos de las aeronaves y procedimientos operativos se han desarrollado para hacer frente a este riesgo. 2. Errores de navegación de la base de datos: Se validan los procedimientos de vuelo a través del vuelo de validación específico para cada operador y aeronave, y el operador está obligado a tener un proceso definido para mantener datos validados a través de cambios a la base de datos de navegación. Operaciones ATC
1. Procedimiento asignados a las aeronaves en condiciones de incapacidad: los operadores son responsables de la disminución del franqueamiento. 2. vectores ATC a las aeronaves en aproximación de tal forma que el rendimiento no se puede lograr: El entrenamiento ATC y los procedimientos debe asegurar el franqueamiento de obstáculos hasta que el avión se establece en el procedimiento, y el ATC no debe interceptar sobre o justo antes de los segmentos curvados del procedimiento.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-41
Operaciones de la tripulación de vuelo
1. Ajustes erróneos del altímetro barométrico: la tripulación debe hacer un procedimiento de chequeo cruzado para mitigar este riesgo.
2. Selección incorrecto del procedimiento o de carga: el procedimiento de la tripulación para verificar el procedimiento cargado del procedimiento publicado deben coincidir, requisito para aeronaves con pantallas de mapas.
3. Selección Incorrecta del modo de control de vuelo: la importancia del entrenamiento del modo de control de vuelo, procedimiento independiente para vigilar la desviación excesiva de la trayectoria.
4. Entrada incorrecta del RNP: el procedimiento de la tripulación para verificar el RNP cargado en el sistema coincida con el valor publicado.
5. Sobre paso/ aproximación Frustrada: aterrizaje rehusado o aterrizaje rechazado a o por debajo de la DA/H.
6. Condiciones meteorológicas Pobres: la pérdida o reducción significativa de la referencia visual que puede provocar o exigir un sobre paso.
Infraestructura
1. Falla de Satélite GNSS: esta condición se evalúa durante la cualificación de las aeronaves para garantizar que franqueamiento de obstáculos pueda ser mantenido, teniendo en cuenta la escasa probabilidad de que esta falla se produzca.
2. La pérdida de señales GNSS: equipo independiente pertinente (por ejemplo, la IRU) es requerida para aproximaciones RNP AR APCH con tramos RF y las aproximaciones donde la precisión para la aproximación frustrada es menos de 1 NM. Para otras aproximaciones, procedimientos operativos se utilizan para la aproximación de las trayectorias publicadas y ascenso por encima de los obstáculos.
3. pruebas de las ayudas a la navegación terrenas en las proximidades de la aproximación: los aviones y los procedimientos operativos son necesarios para detectar y mitigar este evento.
Condiciones de funcionamiento
1. Condiciones de viento de cola: velocidad excesiva en los tramos RF se traducirá en la imposibilidad de mantener la trayectoria. Esta cuestión se aborda a través de los requisitos de las aeronaves en los límites de los mandos de orientación, la inclusión de 5 grados de banqueo margen de maniobrabilidad, consideración de los efectos de la velocidad, y los procedimiento de la tripulación para mantener la velocidad por debajo de la máxima autorizada.
2. Condiciones de viento y el efecto sobre el error técnico de vuelo: un error técnico de vuelo nominal se evalúa en virtud de una variedad de condiciones de
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-42
viento, y procedimientos de la tripulación para vigilar y limitar las desviaciones y garantizar una operación segura.
3. Efectos de temperatura extrema de altitud barométrica (por ejemplo, las temperaturas extremas de frío, atmósfera local conocida o fenómenos meteorológicos, altos vientos, turbulencia severa, etc): el efecto de este error en la trayectoria vertical es mitigada mediante el diseño del procedimiento y procedimientos de la tripulación, con una asignación para compensar a las aeronaves de llevar a cabo este efecto en los procedimientos independientemente del límite de temperatura publicado. El efecto de este error o altura mínima del segmento y la altitud de decisión se tratan de forma equivalente a todas las demás operaciones de aproximación.
REFERENCIAS
Copias de documentos de EUROCAE pueden ser compradas a EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia (Fax: +33 1 46 55 62 65). Sitio web: www.eurocae.eu - Consideraciones de Software EUROCAE/ED-12B en los sistemas de a bordo y de Certificación de Equipos - EUROCAE/ED-58 MOPS Navegación de área para equipos que utilizan Entradas de multi-sensor - EUROCAE/ED-54 MOPR Distancia de equipo interrogadores de medición (DMLE/N y DME/P) que funcionan dentro de la Radio Frecuencia 960 - 1215 Mhz (los equipos de a bordo) - EUROCAE/ED-72A Especificaciones de Performance de Navegación Mínimo de equipos receptores de GPS en el aire utilizado como medio suplementario de navegación - Sistema de Aviación EUROCAE/ED-75B especificación mínima de rendimiento requerido para la performance de navegación de área - EUROCAE/ED-76 Normas para procesamiento de datos aeronáuticos - EUROCAE/ED-77 Normas de Información Aeronáutica Copias de documentos de la FAA pueden ser obtenidas a partir de Superintendente de Documentos, Government Printing Office, Washington, DC 20402-9325, EE.UU.. Sitio web: http://www.faa.gov/aircraft_cert/ (Biblioteca de Orientación y de regulación) - GRT-C115B, Zona de navegación a bordo de equipos multi-sensor de Uso de Insumos
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-C-6-43
- GRT-C129A, equipos de navegación a bordo Adicional Uso del Sistema de Posicionamiento Global (GPS) - GRT C145A, Utilización de sensores de navegación a bordo por el Sistema de Posicionamiento Global (GPS) aumentada por Wide Area Augmentation System (WAAS) - GRT C146A, independiente del equipo de navegación a bordo Usando el Sistema de Posicionamiento Global (GPS) Aumentada por el Wide Area Augmentation System (WAAS) - AC 20-129, Aprobación de Aeronavegabilidad de la navegación vertical (VNAV) Sistemas para el uso en los EE.UU. Nacional Sistema de espacio aéreo (NAS) y Alaska - AC 20-130A, Aprobación de Aeronavegabilidad de la navegación o Sistemas de Gestión de vuelo con Integración de múltiples Sensores de navegación - AC 20-138A, Aprobación de Aeronavegabilidad de Sistema de Posicionamiento Global (GPS) para el uso de equipos de navegación como VFR e IFR sistema Adicional de navegación - AC 20-153, la aceptación de procesos de datos y bases de datos de navegación Asociado - AC 25-1309-1A, Análisis y Diseño de Sistemas - AC 25a-15to, Aprobación de sistemas de gestión de vuelo en la categoría de Aviones de transporte - AC 23-1309-1C, Equipos, Sistemas e Instalaciones en la Parte 23 Aviones - AC 120-29A, Criterios para la Aprobación de la Categoría I y Categoría II mínimos meteorológicos para Aproximación - AC 90-101, de Aprobación de Orientación para la RNP Procedimientos especiales con aeronaves y tripulaciones Autorización Requerida Copias de los documentos RTCA pueden ser obtenidas de RTCA Inc., 1140 Connecticut Avenue, NW, Suite 1020, Washington, DC 20036-4001, EE.UU., (Tel.: 1 202 833 9339). Sitio web: www.rtca.org - RTCA/DO-178B, Consideraciones de software en los sistemas de a bordo y de Certificación de Equipos - RTCA/DO-187, las normas de desempeño operacional mínima para la Navegación Aérea Área Uso de Equipo Multi-sensor de Entradas
Parte C Implementación de RNAV Capítulo 6 Aplicación de RNP AR APCH
Il -C-6-44
- RTCA/DO-189, estándares mínimos de performance a bordo de equipos de medición a distancia (DME) de operación Dentro de la gama de frecuencias de radio 960-1215 megahercios - RTCA/DO-200A, Normas para el procesamiento de datos aeronáuticos - RTCA/DO-201A, Recomendaciones para el usuario de los servicios de información aeronáutica - RTCA/DO-208, las normas de desempeño operacional mínima para la Navegación Aérea Suplementario Uso de equipos de Sistema de Posicionamiento Global (GPS) - RTCA/DO-229C, las normas de desempeño mínimo de Operaciones a bordo de GPS / Equipo de Sistema Aumentación de Área Amplia (WAAS) - RTCA/DO-236B, mínimo las normas de desempeño del sistema de aviación: Performance de navegación requerida para Navegación de área - RTCA/DO-283A, las normas de desempeño operacional mínima para la performance de navegación requerida para el Área Navegación Copias de documentos de la AESA puede obtenerse de la AESA (Agencia Europea de Seguridad Aérea), 101253, D-50452 Koln, Alemania. Copias de los documentos de la OACI pueden ser adquiridos en la Organización de Aviación Civil Internacional, Servicios al Cliente Unidad, 999 University Street, Montreal, Quebec, Canadá H3C 5H7 (Fax: 1 514 954 6769 o por e-mail: [email protected]) o a través de agentes de venta que figuran en el sitio web de la OACI: www.icao.int
II-A-1
Anexo al Volumen II
ADJUNTO
Navegación Barométrica VNAV
INTRODUCCIÓN
Antecedentes
Esta especificación de navegación direcciona los sistemas basados en la utilización de altitud barométrica e información RNAV en la definición de trayectorias de vuelo vertical, y rastreo vertical de una trayectoria. El segmento de aproximación final de un procedimiento de vuelo por instrumentos VNAV se realiza utilizando la orientación vertical de una trayectoria calculada a bordo por el sistema RNAV. La senda de planeo está contenida en la especificación del procedimiento por instrumentos dentro de la base de datos del sistema de navegación RNAV. Para otras fases del vuelo, la navegación barométrica VNAV (baro-VNAV) proporciona información sobre la trayectoria vertical que puede ser definida por los ángulos verticales o altitudes en los puntos de referencia del procedimiento.
Propósito
Esta especificación proporciona orientación a los Estados para la implementación de procedimientos de vuelo por instrumentos donde la navegación barométrica VNAV está autorizada para aproximaciones RNP APCH y RNP AR APCH, que se han aprobado. Para el proveedor de servicios de navegación aérea, que ofrece una recomendación de la OACI de conformidad sobre lo que se implementa. Para el operador, esto refleja material de orientación de aeronavegabilidad que ha existido durante más de 20 años. Esta especificación se destina a facilitar la aprobación operacional para sistemas de navegación barométrica VNAV que han demostrado sus capacidades y obtenido de la reglamentación su aprobación para su uso. Una aprobación operacional basado en estos estándares permite a un operador llevar a cabo operaciones de navegación barométrica VNAV a nivel mundial. Esta especificación establece los criterios de aeronavegabilidad para la aprobación operacional de un sistema RNAV utilizando altimetría barométrica como base de su capacidad de navegación vertical.
Adjunto Navegación Barométrica VNAV
ll-A-2
CONSIDERACIONES ANSP
Aplicación de la Navegación barométrica VNAV
La navegación barométrica VNAV está destinada a ser aplicada donde la guía vertical y la información se proporciona a la tripulación de vuelo sobre los procedimientos de aproximación por instrumentos que contengan una trayectoria de vuelo vertical definida por un ángulo vertical. La navegación Barométrica VNAV También puede ser defina por las limitaciones de altitud, pero sólo para las fases de vuelo distintas a la aproximación. Orientación para su uso operacional están previstas en los PANS-OPS (Doc. 8168), Volumen I.
Franqueamiento de Obstáculos
Orientaciones detalladas sobre franqueamiento de obstáculos para el segmento de aproximación final se presenta en los PANS-OPS (Doc. 8168), Volumen II, los criterios generales que aplican en las partes I y III. Los criterios de los PANS-OPS no proporcionan orientación específica para el diseño de una aproximación barométrica VNAV de superposición de un procedimiento de precisión no convencional con descenso continuo de aproximación final ((CDFA) continuous descent final approach). En tales casos, muchas otras consideraciones deben hacerse para asegurar la continuidad del franqueamiento de obstáculos, la capacidad de volar, la coherencia de las cartas y la compatibilidad con sistemas de a bordo.
CONSIDERACIONES GENERALES PARA EL DESARROLLO DE LA
ESPECIFICACIÓN NAVEGACIÓN BAROMÉTRICA VNAV Consideraciones de la infraestructura de ayudas a la navegación El diseño del procedimiento no tiene requisito singular de la infraestructura. Estos criterios se basan en el uso de altimetría barométrica por un sistema RNAV en el aire cuya capacidad de rendimiento apoya la operación requerida. El diseño del procedimiento debe tener en cuenta las capacidades funcionales exigidos por el presente documento. Consideraciones de la Publicación La cartografía deben seguir las normas del anexo 4 “Cartas Aeronáuticas” para la designación de un procedimiento RNAV donde la trayectoria de vuelo vertical es especificada por un ángulo de senda de planeo. La designación cartográfica siguen
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-3
siendo coherentes con la convención actual (por ejemplo, si el procedimiento lateral está basado en GNSS, la cartografía indicará RNAV (GNSS).
VIGILANCIA E INVESTIGACIÓN DE NAVEGACIÓN Y LOS ERRORES DEL SISTEMA
Si una observación/análisis indica que una pérdida de separación o de franqueamiento de obstáculos se ha producido, la razón de la aparente desviación de la trayectoria o de la altitud debe ser determinado y las medidas adoptadas para prevenir una recurrencia.
LOS INFORMES DE ERRORES DE NAVEGACIÓN Una autoridad reguladora podrá considerar cualquier informe de error de navegación en la determinación de medidas correctivas. Repetidas ocurrencias de errores de navegación atribuidos a una pieza especificad del equipo de navegación puede resultar en la cancelación de la aprobación para la utilización de dicho equipo. Información que indica el potencial de repetir los errores pueden requerir una modificación del programa de entrenamiento del operador. La información que atribuye a múltiples errores de un piloto en particular de la tripulación puede necesitar entrenamiento correctivo o revisión de la licencia.
HIPÓTESIS DEL PROVEEDOR DE SERVICIOS Se espera que los proveedores de servicios de navegación aérea proporcionen datos e información que permitan corregir y precisar los ajustes de altímetro a bordo de la aeronave, así como la temperatura local. Estos datos deben ser de equipos de medición en el aeropuerto, donde la aproximación ha de tener lugar. El medio de transmisión especifico de estos datos y la información para las aeronaves puede incluir la comunicación de voz, ATIS u otros medios de comunicación. En apoyo de esto, también se espera que los proveedores de servicio aseguren la exactitud, vigencia y disponibilidad de los datos meteorológicos de apoyo a operaciones VNAV.
COORDINACIÓN ATC
Se espera que ATC esté familiarizado con las capacidades VNAV de las aeronaves, así como cuestiones relacionadas con el ajuste de altímetro y los datos de temperatura requeridos en el avión.
ESPECIFICACIÓN DE NAVEGACIÓN
Antecedentes
Esta sección identifica los requisitos operacionales para VNAV en relación con las operaciones de RNP APCH. Se supone que la aprobación de aeronavegabilidad de la
Adjunto Navegación Barométrica VNAV
ll-A-4
aeronave y los sistemas se han sido completados. Esto significa que la base de la función VNAV y rendimiento ya han sido establecidos y aprobados sobre la base de los niveles adecuados de análisis, pruebas y demostración. Además, como parte de esta actividad, los procedimientos normales, así como cualquier limitación para la función, Se han documentado, según proceda, en el vuelo de las aeronaves y los manuales de operaciones. El cumplimiento de los requisitos operativos en este documento debería abordarse a través de reglamentos operativos nacionales, y puede, en algunos casos, requerir de una aprobación operacional específica. Por ejemplo, ciertas regulaciones de operación requieren que los operadores apliquen su autoridad nacional (Estado de matrícula) para la aprobación operacional.
PROCESO DE APROBACIÓN Los siguientes pasos deberán ser completados antes de usar VNAV barométrica en la realización de operaciones RNP AR APCH:
a) la elegibilidad de equipos de a bordo deberá ser determinado y documentado;
b) los procedimientos operativos deben ser documentados;
c) El entrenamiento de la tripulación de vuelo sobre la base de los procedimientos operativos deben ser documentados;
d) el citado material deberá ser aceptada por la autoridad reguladora del Estado, y
e) la aprobación operacional deben ser obtenidos de conformidad con las normas de funcionamiento.
Tras la finalización con éxito de los pasos anteriores, una aprobación operacional para el uso de VNAV, una Carta de Autorización LOA o especificación de operaciones adecuada (Especificaciones de OPS), o una modificación del manual de operaciones, en caso necesario, debe ser expedida por el Estado.
Elegibilidad de Aeronaves
Documentación pertinente aceptable para el Estado de operación deben estar disponibles para establecer que la aeronave está equipada con un sistema RNAV con una capacidad VNAV demostrada. Elegibilidad podrá ser establecida en dos etapas, una reconocer las cualidades y cualificaciones de la aeronave y equipos, y la segunda, la determinación de la aceptabilidad para las operaciones. La determinación de la elegibilidad para los sistemas existentes debería considerar la posibilidad de aceptación de la documentación de cumplimiento del fabricante, por ejemplo, AC20-129. Nota.- sistemas RNP AR: sistemas RNAV probados y calificados para las operaciones RNP AR incluyendo VNAV son considerados calificados con reconocimiento de que la aproximación RNP se espera que se realice en conformidad con la aprobación RNP AR del operador. No requiere un nuevo examen de la capacidad de las aeronaves,
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-5
entrenamiento del operador, mantenimiento, procedimientos de funcionamiento, bases de datos, etc. es necesario.
a) Descripción del equipo de la aeronave. El operador deberá disponer de una lista que detalla la configuración de los componentes pertinentes y el equipo que se utilizará para la operación de la aproximación.
Nota.- altimetría barométrica y equipos relacionados tales como sistemas de datos aéreos son una capacidad básica requerida y ya sujeta a requisitos mínimos de equipo para las operaciones de vuelo.
b) Documentación de Entrenamiento. Los operadores comerciales deben tener un programa de entrenamiento que aborden las prácticas operacionales, procedimientos y capacitación relacionada para operaciones de aproximación VNAV en las (por ejemplo inicial, actualización o entrenamiento recurrente para la tripulación de vuelo, despachadores o personal de mantenimiento).
Nota.- No es necesario establecer un programa de entrenamiento por separado o en régimen si el entrenamiento RNAV y VNAV es ya un elemento integrado de un programa de entrenamiento. Sin embargo, debería ser posible identificar qué aspectos de VNAV están cubiertos dentro de un programa de entrenamiento. Los operadores privados deben estar familiarizados con las prácticas y procedimientos identificados en el punto "conocimientos de los piloto y el entrenamiento”.
c) manuales de operaciones y listas de comprobación. Manuales de operaciones y listas de comprobación para los operadores comerciales deben tener en cuenta información y orientación sobre los procedimientos normalizados de operación detallado en “Procedimientos Operacionales” Los manuales deben contener las instrucciones operacionales de navegación y procedimientos de contingencia, si se especifica. Manuales y listas de comprobación debe someterse a una revisión como parte del proceso de solicitud.
Los operadores privados deberán operar usando las prácticas y los procedimientos identificados en el punto "conocimientos de los piloto y el entrenamiento”.
Consideraciones, Lista de equipo mínimo (MEL)
Cualquier revisión única del MEL necesaria para hacer frente a las disposiciones de aproximaciones VNAV debe ser aprobada. Los operadores deben ajustar la MEL, o equivalente, y especificar las condiciones de ejecución. Nota.- altimetría barométrica y los sistemas relacionados son equipo mínimo para todas las operaciones. Cualquier única expedición o supuesto de funcionamiento debe ser documentado. Requisitos del sistema de las aeronaves Sistemas de navegación vertical barométrica (VNAV) el rendimiento del sistema VNAV Barométrica operaciones de aproximación se basan en el uso de equipo RNAV que
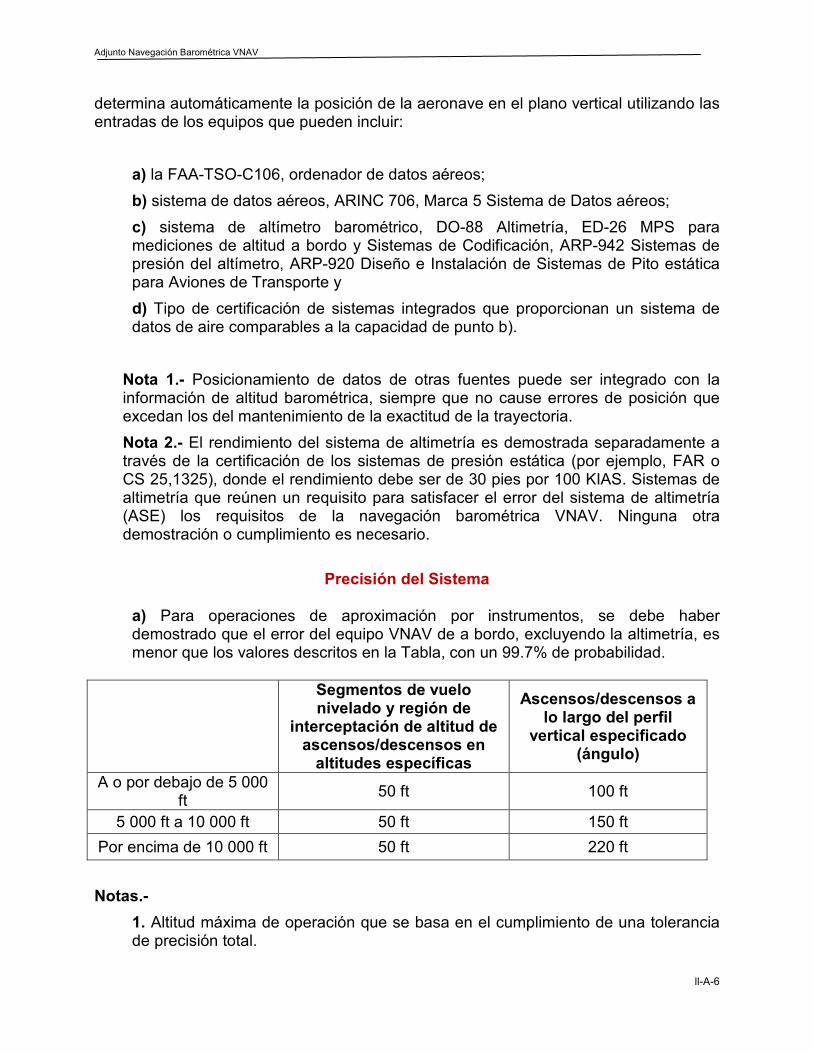
Adjunto Navegación Barométrica VNAV
ll-A-6
determina automáticamente la posición de la aeronave en el plano vertical utilizando las entradas de los equipos que pueden incluir:
a) la FAA-TSO-C106, ordenador de datos aéreos;
b) sistema de datos aéreos, ARINC 706, Marca 5 Sistema de Datos aéreos;
c) sistema de altímetro barométrico, DO-88 Altimetría, ED-26 MPS para mediciones de altitud a bordo y Sistemas de Codificación, ARP-942 Sistemas de presión del altímetro, ARP-920 Diseño e Instalación de Sistemas de Pito estática para Aviones de Transporte y
d) Tipo de certificación de sistemas integrados que proporcionan un sistema de datos de aire comparables a la capacidad de punto b).
Nota 1.- Posicionamiento de datos de otras fuentes puede ser integrado con la información de altitud barométrica, siempre que no cause errores de posición que excedan los del mantenimiento de la exactitud de la trayectoria.
Nota 2.- El rendimiento del sistema de altimetría es demostrada separadamente a través de la certificación de los sistemas de presión estática (por ejemplo, FAR o CS 25,1325), donde el rendimiento debe ser de 30 pies por 100 KIAS. Sistemas de altimetría que reúnen un requisito para satisfacer el error del sistema de altimetría (ASE) los requisitos de la navegación barométrica VNAV. Ninguna otra demostración o cumplimiento es necesario.
Precisión del Sistema
a) Para operaciones de aproximación por instrumentos, se debe haber demostrado que el error del equipo VNAV de a bordo, excluyendo la altimetría, es menor que los valores descritos en la Tabla, con un 99.7% de probabilidad.
Segmentos de vuelo nivelado y región de
interceptación de altitud de ascensos/descensos en altitudes específicas
Ascensos/descensos a lo largo del perfil
vertical especificado (ángulo)
A o por debajo de 5 000 ft
50 ft 100 ft
5 000 ft a 10 000 ft 50 ft 150 ft
Por encima de 10 000 ft 50 ft 220 ft
Notas.-
1. Altitud máxima de operación que se basa en el cumplimiento de una tolerancia de precisión total.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-7
2. La orientación VNAV puede ser utilizada en el nivel de vuelo en ruta como en el caso de leyes de control de mantenimiento de la altitud, que se integran con leyes de control de velocidad para proporcionar un presupuesto de energía. El incremento de error de componentes aportados por la VNAV equivalente debe ser compensado por una reducción correspondiente en los demás componentes de error, como error técnico de vuelo, para garantizar que el error total presupuestado no se supere.
3. El error de altimetría se refiere a la salida eléctrica e incluye todos los errores imputables a la instalación de altimetría de las aeronaves incluidos los efectos de la posición normal de vuelo de las actitudes de las aeronaves. En las aeronaves de alto rendimiento, se espera que la corrección de altimetría se prestara. Dicha corrección se realiza automáticamente. En aeronaves de bajo rendimiento, el mejoramiento del sistema de altimetría puede ser necesario.
4. los errores del equipo VNAV incluye todos errores resultantes de la instalación del equipo de orientación vertical. No incluye los errores del sistema de altímetro, pero no incluyen cualquier error adicional resultante de la adición de equipo VNAV. Este componente de error puede ser cero a nivel en ruta de vuelo si la operación se limita a la orientación por medio de sólo el altímetro. No debe tenerse en cuenta en las operaciones de terminal y en aproximación donde el piloto espera seguir las indicaciones VNAV.
5. El componente de error vertical de un error de posición a lo largo de la trayectoria es delimitada por el siguiente equipo requisitos de cualificación para navegación barométrica VNAV, y directamente reflejada en la tolerancia a lo largo de la trayectoria compensada utilizada en los criterios de diseño de procedimiento de navegación barométrica VNAV:
- sistemas de navegación GNSS certificada para aproximación o sistemas de sensores múltiples que utilizan IRU en combinación con el GNSS; o
- sistemas RNP aprobados para RNP 0,3 o menos;
- equipo VNAV útil;
- sistema VNAV certificados para las operaciones de aproximación de navegación VNAV barométrica;
- sistema equipado con LNAV/VNAV integrado con fuente precisa de altitud barométrica, y
- altitudes VNAV e información de procedimientos desde una base de datos de navegación con integridad a través de la garantía de calidad.
b) Errores técnicos de vuelo verticales (FTE).- Utilizando presentaciones satisfactorias de información de guía vertical, se debe haber demostrado que los errores técnicos de vuelo son menores que los valores de la siguiente Tabla, en base a tres sigmas:
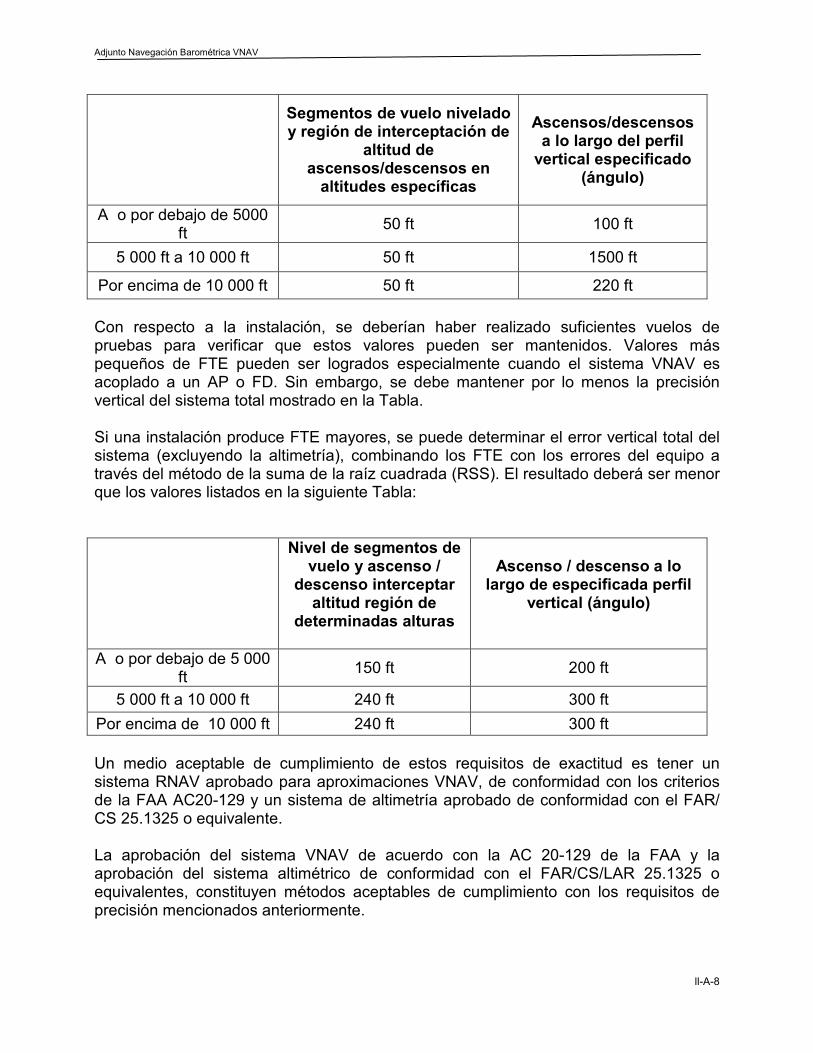
Adjunto Navegación Barométrica VNAV
ll-A-8
Segmentos de vuelo nivelado y región de interceptación de
altitud de ascensos/descensos en altitudes específicas
Ascensos/descensos a lo largo del perfil vertical especificado
(ángulo)
A o por debajo de 5000 ft
50 ft 100 ft
5 000 ft a 10 000 ft 50 ft 1500 ft
Por encima de 10 000 ft 50 ft 220 ft
Con respecto a la instalación, se deberían haber realizado suficientes vuelos de pruebas para verificar que estos valores pueden ser mantenidos. Valores más pequeños de FTE pueden ser logrados especialmente cuando el sistema VNAV es acoplado a un AP o FD. Sin embargo, se debe mantener por lo menos la precisión vertical del sistema total mostrado en la Tabla. Si una instalación produce FTE mayores, se puede determinar el error vertical total del sistema (excluyendo la altimetría), combinando los FTE con los errores del equipo a través del método de la suma de la raíz cuadrada (RSS). El resultado deberá ser menor que los valores listados en la siguiente Tabla:
Nivel de segmentos de vuelo y ascenso /
descenso interceptar altitud región de
determinadas alturas
Ascenso / descenso a lo largo de especificada perfil
vertical (ángulo)
A o por debajo de 5 000 ft
150 ft 200 ft
5 000 ft a 10 000 ft 240 ft 300 ft
Por encima de 10 000 ft 240 ft 300 ft Un medio aceptable de cumplimiento de estos requisitos de exactitud es tener un sistema RNAV aprobado para aproximaciones VNAV, de conformidad con los criterios de la FAA AC20-129 y un sistema de altimetría aprobado de conformidad con el FAR/ CS 25.1325 o equivalente. La aprobación del sistema VNAV de acuerdo con la AC 20-129 de la FAA y la aprobación del sistema altimétrico de conformidad con el FAR/CS/LAR 25.1325 o equivalentes, constituyen métodos aceptables de cumplimiento con los requisitos de precisión mencionados anteriormente.
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-9
Función de Continuidad
Para las operaciones basadas en el uso de la capacidad de navegación barométrica VNAV, por lo menos un sistema RNAV es requerido.
Función de navegación Vertical
Definición de Trayectoria Los requisitos para la definición la trayectoria vertical se rigen por los dos requisitos generales para la operación: La concesión para el rendimiento de las aeronaves, y la repetibilidad y la previsibilidad en la definición de la trayectoria. Esta relación operacional conduce a las especificaciones en las siguientes secciones que se basan en fases específicas del vuelo y las operaciones de vuelo. El sistema de navegación debe ser capaz de definir una trayectoria vertical de acuerdo con la trayectoria vertical publicada. También debe ser capaz de especificar una trayectoria vertical entre las limitaciones de altitud de dos puntos de referencia de un plan de vuelo. Las limitaciones de altitud en los puntos de referencia deben estar definidas como una de las siguientes:
a) una limitación de altitud A o POR ENCIMA DE / AT or ABOVE (por ejemplo, 2400A, puede ser apropiada para situaciones donde no se requiere limitar la trayectoria vertical);
b) una limitación de altitud A o POR DEBAJO DE / AT or BELOW (por ejemplo, 4800B, puede ser apropiada para situaciones donde no se requiere limitar la trayectoria vertical);
c) una limitación de altitud A/AT (por ejemplo 5200); o
d) una limitación de altitud tipo VENTANA / WINDOW (por ejemplo 2400A3400B).
Nota.- Para los procedimientos RNP AR APCH, cualquier segmento con una trayectoria publicada definirá esa trayectoria en base a un ángulo hasta el punto de referencia y altitud.
Restricciones verticales Altitudes y/o velocidades asociadas con los procedimientos publicados deben ser automáticamente extraídos desde la base de datos de navegación al seleccionar el procedimiento de aproximación.
Construcción de Trayectoria
Adjunto Navegación Barométrica VNAV
ll-A-10
El sistema debe ser capaz de construir una trayectoria para proveer guía vertical desde una posición actual hasta un punto de referencia limitado. Capacidad para cargar los procedimientos de la base de datos de navegación
El sistema de navegación debe tener la capacidad para cargar y modificar dentro del sistema RNAV/RNP, un procedimiento o procedimientos completos desde una base de datos de a bordo. Esto incluye la aproximación (con un ángulo vertical), la aproximación frustrada y las transiciones de la aproximación para el aeródromo y pista seleccionada. El sistema RNAV/RNP deberá evitar la modificación de la información del procedimiento contenida en la base de datos de navegación.
Límites de temperatura Para aeronaves que utilicen navegación vertical barométrica sin compensación de temperatura en la aproximación, las limitaciones de temperaturas bajas están reflejadas en el diseño del procedimiento e identificadas junto con cualquier límite de temperatura alta en la carta del procedimiento. Las temperaturas bajas reducen el ángulo de trayectoria de planeo real mientras que las temperaturas altas aumentan el ángulo de trayectoria de planeo. Las aeronaves que utilicen navegación vertical barométrica con compensación de temperatura o aeronaves que utilicen un medio alterno de guía vertical (p. ej., Sistema de aumentación basado en satélites (SBAS)) pueden obviar las limitaciones de temperatura. En virtud que los límites de temperatura establecidos en las cartas son evaluados únicamente para el franqueamiento de obstáculos en el segmento de aproximación final y considerando que la compensación de la temperatura afecta solamente la guía vertical, el piloto puede tener la necesidad de ajustar la altitud mínima en los segmentos de aproximación inicial e intermedio y en la altitud/altura de decisión (DA/H)
Nota 1.- La temperatura afecta a la altitud indicada. El efecto es similar a tener cambios de presión alta y baja pero no tan significantes como dichos cambios. Cuando la temperatura es más alta que la estándar (temperatura en condiciones de atmósfera tipo internacional (ISA)), la aeronave estará volando por encima de la altitud indicada. Cuando la temperatura es menor que la estándar, la aeronave estará volando por debajo de la altitud indicada en el altímetro. Para información adicional, refiérase a los errores del altímetro en el manual de información aeronáutica (AIM)
Nota 2.- Las condiciones estándar de ISA al nivel del mar son:
• La temperatura estándar es definida como 15º Celsius (centígrados) o 288.15º Kelvin;
• La presión estándar es definida como 29.92126 pulgadas de mercurio (Hg) o 1013.2 hectopascales (hPa); y
• La densidad estándar para estas condiciones es de 1.225 kg/m3 o 0.002377 slugs/pie cúbico.
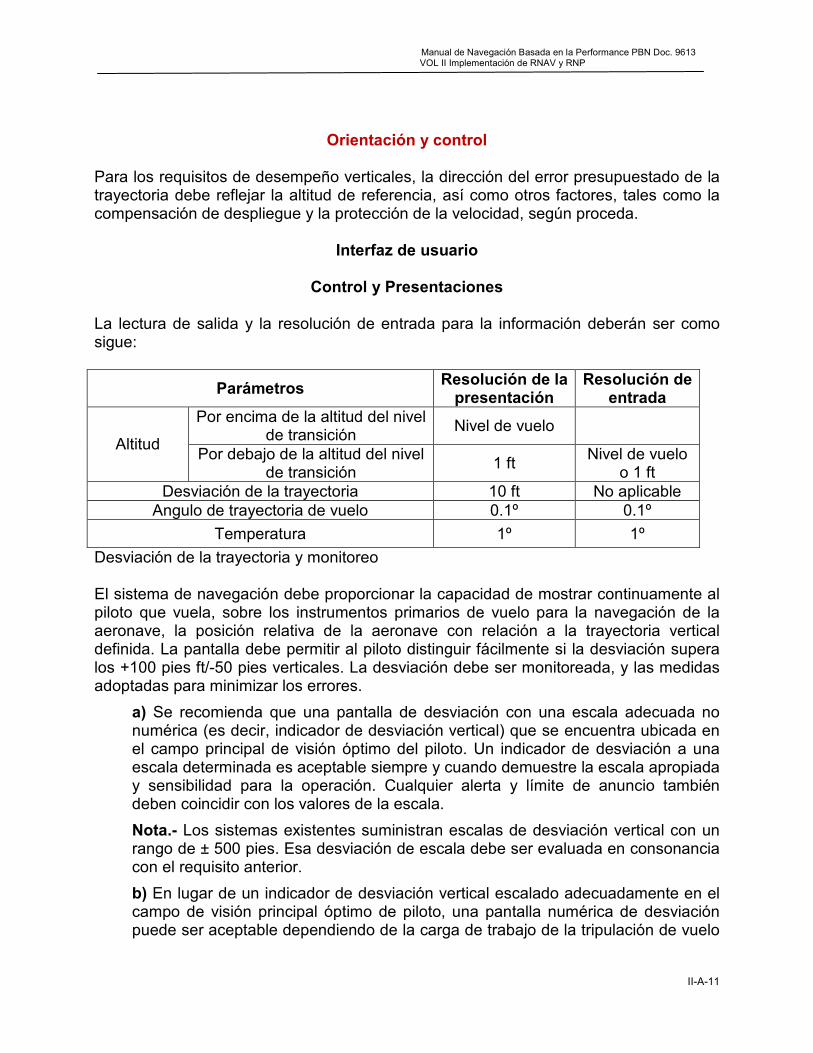
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-11
Orientación y control Para los requisitos de desempeño verticales, la dirección del error presupuestado de la trayectoria debe reflejar la altitud de referencia, así como otros factores, tales como la compensación de despliegue y la protección de la velocidad, según proceda.
Interfaz de usuario
Control y Presentaciones La lectura de salida y la resolución de entrada para la información deberán ser como sigue:
Parámetros Resolución de la presentación
Resolución de entrada
Por encima de la altitud del nivel de transición
Nivel de vuelo Altitud
Por debajo de la altitud del nivel de transición
1 ft Nivel de vuelo
o 1 ft Desviación de la trayectoria 10 ft No aplicable Angulo de trayectoria de vuelo 0.1º 0.1º
Temperatura 1º 1º
Desviación de la trayectoria y monitoreo El sistema de navegación debe proporcionar la capacidad de mostrar continuamente al piloto que vuela, sobre los instrumentos primarios de vuelo para la navegación de la aeronave, la posición relativa de la aeronave con relación a la trayectoria vertical definida. La pantalla debe permitir al piloto distinguir fácilmente si la desviación supera los +100 pies ft/-50 pies verticales. La desviación debe ser monitoreada, y las medidas adoptadas para minimizar los errores.
a) Se recomienda que una pantalla de desviación con una escala adecuada no numérica (es decir, indicador de desviación vertical) que se encuentra ubicada en el campo principal de visión óptimo del piloto. Un indicador de desviación a una escala determinada es aceptable siempre y cuando demuestre la escala apropiada y sensibilidad para la operación. Cualquier alerta y límite de anuncio también deben coincidir con los valores de la escala.
Nota.- Los sistemas existentes suministran escalas de desviación vertical con un rango de ± 500 pies. Esa desviación de escala debe ser evaluada en consonancia con el requisito anterior.
b) En lugar de un indicador de desviación vertical escalado adecuadamente en el campo de visión principal óptimo de piloto, una pantalla numérica de desviación puede ser aceptable dependiendo de la carga de trabajo de la tripulación de vuelo
Adjunto Navegación Barométrica VNAV
ll-A-12
y las características de la pantalla numérica. Una pantalla numérica puede exigir un entrenamiento inicial de la tripulación de vuelo.
c) Dado que la escala vertical y la sensibilidad varía mucho, la elegibilidad de los aviones también deben estar equipados con y operacionalmente utilizando un director de vuelo o piloto automático capaz de seguir la trayectoria vertical.
Altitud barométrica
El avión debe mostrar la altitud barométrica de dos fuentes de altimetría independientes, uno en cada puesto de pilotaje dentro del campo primario de visión óptimo. Los procedimientos del operador deben garantizar los ajustes de altímetro actuales para seleccionar el procedimiento por instrumentos y la pista.
Procedimientos de funcionamiento La certificación de aeronavegabilidad por sí sola no autoriza a los operadores a utilizar la capacidad VNAV durante la realización de operaciones de vuelo. La aprobación operacional es requerida para confirmar la adecuación de los procedimientos normales y de contingencia de los operadores para la instalación del equipo especial. Los pilotos deben utilizar un piloto automático o director de vuelo cuando vuelen una trayectoria vertical basada en VNAV.
Para las operaciones APV/baro-VNAV, las tripulaciones deben familiarizarse con los siguientes procedimientos:
a) Correcciones por temperaturas bajas.- Los pilotos son responsables de toda corrección por temperaturas bajas que se requiera a todas las altitudes/alturas mínimas publicadas. Esto incluye:
1) Las altitudes/alturas para los tramos inicial e intermedio;
2) La DA/H; y
3) Las altitudes/alturas de aproximación frustrada subsiguientes.
Nota.- El VPA de la trayectoria de aproximación final está protegida contra los efectos de las temperaturas bajas por el diseño del procedimiento.
b) Reglaje del altímetro.- Solo se realizarán operaciones APV/baro-VNAV cuando:
1) se disponga de una fuente de reglaje del altímetro actual y local; y
2) se seleccione de manera apropiada el *QNH/*QFE en el altímetro de la aeronave.
*QNH: Presión al nivel medio del mar. Este reglaje indica la altitud sobre el nivel medio del mar (MSL), si la temperatura es estándar
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-13
*QFE: Atmósfera estándar que corresponde a 1013 hPa o 29.92” Hg. Este reglaje indica la altitud sobre la superficie isobárica de 1013 hPa, si la temperatura es estándar
Nota.- no se utilizará una fuente a distancia (remota) para el reglaje del altímetro.
c) Acciones a ser tomadas en la DA.- Se espera que la tripulación de vuelo opere la aeronave a lo largo de la trayectoria vertical publicada y que ejecute un procedimiento de aproximación frustrada una vez que alcanza la DA, a menos que tenga a la vista las referencias visuales requeridas para continuar con la aproximación.
d) Limitación de temperatura.- Debido a los efectos pronunciados de la temperatura no estándar en las operaciones baro-VNAV, los procedimientos de aproximación instrumental contendrán una limitación de temperatura bajo la cual no se autoriza la utilización de una altitud de decisión de navegación vertical (VNAV DA) basada en baro-VNAV. La limitación de temperatura será mostrada mediante una nota en el procedimiento de aproximación instrumental. Si el sistema de a bordo contiene la capacidad para compensar la temperatura, la tripulación debe seguir los procedimientos del explotador basados en las instrucciones del fabricante.
e) Selección del modo de trayectoria VNAV.- Las tripulaciones de vuelo deben conocer la selección apropiada del modo o modos verticales que comandan la navegación vertical a través de la trayectoria de vuelo publicada. Otros modos verticales tales como la velocidad vertical no son aplicables para la aproximación baro-VNAV.
f) Restricción para utilizar una fuente a distancia (remota) para el reglaje del altímetro.- La utilización de la baro-VNAV hasta una DA no está autorizada cuando el reglaje del altímetro es promulgado desde una fuente a distancia. Para las operaciones APV/baro-VNAV se requiere un reglaje vigente del altímetro para el aeródromo de aterrizaje. Cuando se muestran mínimos relacionados con un reglaje del altímetro a distancia, la función VNAV puede ser utilizada, pero sólo hasta la altitud mínima de descenso de navegación lateral (LNAV MDA) publicada.
g) Ajustes manuales.- Si es necesario realizar ajustes manuales para almacenar información de altitud, p. ej., ajustes por temperaturas bajas, la tripulación de vuelo debe hacer los ajustes apropiados en las altitudes del procedimiento y revertir para utilizar la LNAV MDA de la temperatura ajustada.
Procedimientos generales de funcionamiento El piloto debe cumplir con las instrucciones o procedimientos señalados por el fabricante, según sea necesario para cumplir con los requisitos de desempeño en este capítulo.
Reglaje del altímetro Las tripulaciones de vuelo deben ejercer precaución al cambiar el reglaje del altímetro y solicitarán un reglaje vigente si el reglaje anterior no es actual, particularmente cuando
Adjunto Navegación Barométrica VNAV
ll-A-14
la presión tiende a disminuir rápidamente. Los reglajes del altímetro a distancia no son permitidos para las operaciones APV/baro-VNAV.
Temperaturas bajas
Cuando existan temperaturas bajas, el piloto deberá verificar la carta del procedimiento de aproximación por instrumentos para determinar el límite de la temperatura para la utilización de la capacidad baro-VNAV. Sí el sistema de a bordo contiene una capacidad de compensación de temperatura, la tripulación deberá seguir los procedimientos establecidos por el explotador en base a las instrucciones del fabricante para la utilización de la función baro-VNAV Procedimientos de Contingencia En caso de que el procedimiento de contingencia requiere una reversión a un procedimiento convencional, Los preparativos necesarios deben completarse antes de iniciar los procedimientos RNAV, consistentes con las prácticas de operador.
Conocimiento del Piloto y entrenamiento
El programa de instrucción del explotador deberá incluir adiestramiento suficiente (p. ej., instrucción en tierra, en simuladores de vuelo, dispositivos de instrucción de vuelo (FTD) o en la aeronave) para las tripulaciones de vuelo y despachadores de vuelo, acerca de las capacidades VNAV de la aeronave. La capacitación incluirá las siguientes áreas:
a) la información en este capítulo;
b) el significado y el uso adecuado de los sistemas de la aeronave;
c) las características de un procedimiento APV/baro-VNAV según lo determinado en la representación pictórica de la carta y en la descripción textual;
1) descripción de los tipos de WPT (WPT de paso y de sobrevuelo), terminaciones de trayectoria y de cualquier otro tipo de terminación utilizado por el explotador, así como de las trayectorias de vuelo asociadas de la aeronave;
2) información sobre el sistema específico RNAV/RNP;
3) niveles de automatización, modos de anuncios, cambios, alertas, interacciones, reversiones y degradación;
4) integración funcional con otros sistemas de la aeronave;
5) el significado de las discontinuidades de la trayectoria vertical, así como de los procedimientos de la tripulación de vuelo relacionado;
6) procedimientos de monitoreo para cada fase de vuelo (p. ej., monitoreo de la páginas “PROGRESS” o “LEGS”);
Manual de Navegación Basada en la Performance PBN Doc. 9613 VOL II Implementación de RNAV y RNP
II-A-15
7) anticipaciones de viraje considerando los efectos de la velocidad y altitud; e
8) interpretación de las presentaciones electrónicas y símbolos.
d) los procedimientos de operación del equipo VNAV, como sean aplicable, incluyendo como realizar las siguientes acciones:
1) adherencia a las limitaciones de velocidad y/o altitud asociadas con un procedimiento de aproximación;
2) verificación de los WPT y de la programación del plan de vuelo;
3) vuelo directo a un punto de recorrido;
4) determinación del error/desviación de la derrota vertical;
5) inserción y eliminación de la discontinuidad de ruta;
6) cambio del aeródromo de destino y de alternativa;
7) procedimientos de contingencia para fallas VNAV;
8) debería haber una comprensión clara de los requisitos de la tripulación para las comparaciones de la información primaria del altímetro, controles cruzados de altitud (por ejemplo, las comparaciones de altimetría de 100 pies), las limitaciones de la temperatura para instrumentos utilizando procedimientos VNAV, y procedimientos para la configuración de altímetro para aproximaciones, y
9) la suspensión de un procedimiento basado en la pérdida de los sistemas o rendimiento y condiciones de vuelo, por ejemplo, incapacidad para mantener la trayectoria requerida, la pérdida de la orientación requerida, etc.
Orientación adicional de operaciones relacionadas con las consideraciones reflejadas en el diseño de procedimientos se incluyen en los PANS-OPS (Doc. 8168), Volumen I.
Base de Datos de Navegación La base de datos de navegación debe ser obtenida a partir de un proveedor titular de una EASA o Carta de Aceptación (LOA) FAA. Esta LOA demuestra el cumplimiento del documento EUROCAE / RTCA ED-76/DO-200A, Normas para el procesamiento de datos aeronáuticos. FAA AC 20-153/EASA IR 21 sub-parte G ofrece orientación adicional sobre cartas de aceptación Tipo 1 y 2. Discrepancias que invalidan un procedimiento deben ser reportados al proveedor de base de datos de navegación y el procedimiento afectado debe ser prohibido por un aviso del operador a su tripulación de vuelo. Los explotadores de aeronaves deben considerar la necesidad de realizar controles periódicos de las bases de datos operacionales de navegación a fin de satisfacer los requisitos del sistema de calidad.
Adjunto Navegación Barométrica VNAV
ll-A-16
REFERENCIAS
Copias de documentos de EUROCAE pueden ser compradas a EUROCAE, 102 rue Etienne Dolet, 92240 Malakoff, Francia (Fax: +33 1 46 55 62 65). Sitio web: www.eurocae.eu - EUROCAE/ED-76 Normas para procesamiento de datos aeronáuticos - EUROCAE/ED-77 Normas de Información Aeronáutica Copias de documentos de la FAA pueden ser obtenidas a partir de Superintendente de Documentos, Government Printing Office, Washington, DC 20402-9325, EE.UU.. Sitio web: http://www.faa.gov/aircraft_cert/ (Biblioteca de Orientación y de regulación) - AC 20-129, Aprobación de Aeronavegabilidad de la navegación vertical (VNAV) Sistemas para el uso en los EE.UU. Nacional Sistema de espacio aéreo (NAS) y Alaska - AC 20-153, la aceptación de procesos de datos y bases de datos de navegación Asociado Copias de los documentos RTCA pueden ser obtenidas de RTCA Inc., 1140 Connecticut Avenue, NW, Suite 1020, Washington, DC 20036-4001, EE.UU., (Tel.: 1 202 833 9339). Sitio web: www.rtca.org - RTCA/DO-200A, Normas para el procesamiento de datos aeronáuticos - RTCA/DO-201A, Recomendaciones para el usuario de los servicios de información aeronáutica
Top Related