




Idiomas
Páginas
Jurídico


Curso de Robótica y aplicaciones a el Aula de Tecnología
IES Joan Miró Página 1
Curso de Robótica y otras
aplicaciones en el Aula de
Tecnología
Pedro Alonso Sanz
IES Joan Miró
Enero 2009

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 2
1.- MANEJO DEL LABORATORIO ELECTRÓNICO VIRTUAL “PROTEUS”. ............................ 4
1.1.- ISIS (CAPTURA Y SIMULACIÓN DE CIRCUITOS ELECTRÓNICOS). ............................................. 4
1.1.1.- Introducción. ............................................................................................................................. 4
1.1.2.- Captura Electrónica: Entorno Gráfico (ISIS) .............................................................................. 5
1.1.3.- Depuración de programas. ....................................................................................................... 9
1.2.- ARES (DISEÑO DE PLACAS). .............................................................................................. 17
1.2.1.- Diseño de un esquema con ISIS. .............................................................................................. 17
1.2.2.- Generación del listado de conexiones “Netlis to Ares”. .......................................................... 21
1.2.2.1.- Entorno de Trabajo .......................................................................................................................... 22
1.2.3.- Creación del tamaño de la placa de PCB. ............................................................................... 22
1.2.4.- Posicionamiento de los componentes dentro de la placa. ...................................................... 25
1.2.4.1.- Posicionamiento Automático. ......................................................................................................... 25
1.2.4.2.- Posicionamiento Manual. ................................................................................................................ 26
1.2.5.- Rutado de la pistas. ................................................................................................................ 27
1.2.5.1.- Rutado Automático. ........................................................................................................................ 28
1.2.5.2.- Rutado manual. ............................................................................................................................... 29
1.3.- CREACIÓN DE SÍMBOLOS EN ISIS Y ENCAPSULADOS EN ARES. .......................................... 34
1.3.1.- Creación de una biblioteca de encapsulados en ARES. ........................................................... 34
1.3.2.- Creación de un encapsulado en ARES. ................................................................................... 36
1.3.3.- Creación de una biblioteca de símbolos en ISIS. ..................................................................... 39
1.3.4.- Creación de un símbolo en ISIS. ............................................................................................. 41
2.- PRINCIPIOS DE FUNCIONAMIENTO DE UN MICROCONTROLADOR PIC. ...................... 47
2.1.- DIAGRAMA EN BLOQUES. ................................................................................................... 49
2.2.- MAPA DE MEMORIA. ........................................................................................................... 50
2.2.1.- Memoria de Programa. .......................................................................................................... 50
2.2.2.- Memoria de Datos. ................................................................................................................. 50
3.- INICIACIÓN A LA PROGRAMACIÓN EN C EN UC PIC. ........................................................ 51
3.1.- COMPILADOR CCS. ............................................................................................................... 51
3.1.1.- Introducción. ........................................................................................................................... 51
3.1.2.- Estructura de un programa. ................................................................................................... 51
3.1.3.- Constantes. ............................................................................................................................. 53
3.1.4.- Tipo de variables. .................................................................................................................... 54
3.1.5.- Operadores. ............................................................................................................................ 55
a) Asignación. ................................................................................................................................................ 55
b) Aritméticos. ............................................................................................................................................... 55
c) Relacionales. .............................................................................................................................................. 55
d) Lógicos. ...................................................................................................................................................... 55
e) De Bits. ...................................................................................................................................................... 56
f) Punteros. .................................................................................................................................................... 56
3.1.6.- Funciones. ............................................................................................................................... 56
3.2.- MANEJO DE LAS DECLARACIONES DE CONTROL. ................................................................ 59
3.2.1.- If-Else. .................................................................................................................................. 60
3.2.2.- Switch-Case. ....................................................................................................................... 63
3.2.3.- For. ........................................................................................................................................ 66
3.2.4.- While. .................................................................................................................................... 70
3.2.5.- Do-While. ............................................................................................................................. 72
3.3.- CREACIÓN DE FUNCIONES. ................................................................................................ 74
3.4.- MANEJO Y CREACIÓN DE DRIVER O LIBRERÍAS. .................................................................... 80

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 3
4.- EJEMPLOS PRÁCTICOS. ......................................................................................................... 82
4.1.- INTERFACE OPTOACOPLADA ENTRE DISPOSITIVOS DIGITALES Y ANALÓGICOS ...................... 82
4.1.1.- Control con Relés. ................................................................................................................... 82
4.1.2.- Control con Optotransistores. ................................................................................................. 84
4.1.3.- Control con Optotriac. ............................................................................................................ 86
4.2.- CONTROL DE UNA PANTALLA LCD. .................................................................................... 88
4.2.1.- LCD_ejemplo1.c ...................................................................................................................... 91
4.2.2.- LCD_ejemplo2.c ...................................................................................................................... 92
4.2.3.- LCD_ejemplo3.c ...................................................................................................................... 93
4.2.4.- LCD_ejemplo4.c ...................................................................................................................... 94
4.2.5.- LCD_ejemplo5.c ...................................................................................................................... 95
4.2.6.- LCD_ejemplo6.c ...................................................................................................................... 96
4.2.7.- LCD_ejemplo7.c ...................................................................................................................... 97
4.3.- DIGITALIZACIÓN DE UNA SEÑAL ANALÓGICA CON EL SISTEMA DE ADQUISICIÓN DE DATOS...... 99
4.3.1.- Conversión_A/D_D/A.c ......................................................................................................... 101
4.3.2.- Conversión_A-D1.c ................................................................................................................ 104
4.3.3.- Conversión_A-D2.c ............................................................................................................... 106
4.3.4.- Conversión_A-D3.c ................................................................................................................ 107
4.4.- CONTROL DE VELOCIDAD Y SENTIDO DE GIRO DE MOTORES DE CORRIENTE CONTINUA. ...... 109
4.4.1.- PWM1.c ................................................................................................................................ 110
4.4.2.- PWM2.c ................................................................................................................................ 111
4.4.3.- PWM3.c ................................................................................................................................ 115
4.5.- CONTROL DE UN SERVO DE POSICIÓN. ............................................................................. 117
4.5.1.- Control_2_Servos_Posición.c ................................................................................................ 118
4.6.- DISEÑO DE MANDOS TRANSMISORES Y RECEPTORES DE RADIO FRECUENCIA. ................... 123
4.6.1.- Introducción. ......................................................................................................................... 123
4.6.1.1.- Transmisión serie asíncrona. ......................................................................................................... 123
4.6.1.2.- Modulación en AM. ....................................................................................................................... 124
4.6.1.3.- Protocolo de Comunicaciones entre el Mando y el Receptor. ...................................................... 124
4.6.2.- Ejemplo 1 (Transmisión Simple). ........................................................................................... 126
4.6.3.- Ejemplo2 (Transmisión Compleja). ....................................................................................... 131
4.6.4.- Apertura de una puerta. ....................................................................................................... 140
4.7.- DISEÑO Y CREACIÓN DE UN ROBOT RASTREADOR Y COCHE TELEDIRIGIDO. ....................... 146

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 4
Fabricación de la Placa Creación del
Prototipo
Desarrollo
del software Pruebas del
Prototipo Diseño esquemático
del prototipo
Diseño de la
Placa
En caso de error en el prototipo se
tiene que repetir el proceso
En caso de error se depura hasta
obtener los resultados adecuados
Fabricación
de la Placa
Desarrollo
del software
Fabricación del
Prototipo Diseño esquemático
del prototipo
Diseño de
la Placa Simulación del
Circuito
1.- Manejo del laboratorio electrónico virtual “Proteus”.
1.1.- ISIS (Captura y Simulación de circuitos electrónicos).
1.1.1.- Introducción.
El laboratorio virtual electrónico PROTEUS VSM de LABCENTER ELECTRONICS, nos
permite simular circuitos electrónicos analógicos/ digitales y microprocesados. Es capaz de
realizar simultáneamente una simulación hardware y software (Lenguaje de bajo y alto nivel
Ensamblador y C respectivamente) en un mismo entorno gráfico. También enlaza con una
herramienta que nos permite desarrollar las placas para realizar los prototipos.
Para ello suministra tres potentes herramientas:
· ISIS (Diseño Gráfico)
· VSM(Virtual System Modelling) Simulación de Componentes.
· ARES (Diseño de Placas).
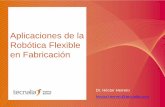
Las herramientas tradicionales de diseño seguían el siguiente proceso:
Con las herramientas de diseño tradicionales, el desarrollo del software y la comprobación del
prototipo, no puede realizarse hasta que este no se desarrolla. Esto puede suponer semanas
de retraso. Si se localiza un error hardware, la totalidad del proceso se debe repetir.
Usando Proteus VSM, el desarrollo del software puede comenzar tan pronto como el diseño
esquemático este acabado y la combinación del hardware y el software nos permite testear el
prototipo y ver si funciona.

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 5
1.1.2.- Captura Electrónica: Entorno Gráfico (ISIS)
Isis es un programa de diseño electrónico que permite realizar esquemas que pueden
simularse en el entorno VMS y/o pasarlos a un circuito impreso a través del entorno de ARES.
Posee una colección de bibliotecas de componentes. Permite crear nuevos componentes y su
modelización para la simulación.
Sin entrar profundamente en este entorno (Requeriría un libro solo para el entorno de ISIS), se
va a explicar cómo dibujar cualquier circuito electrónico. El programa de ISIS posee un
entorno de trabajo formado por una ventana de trabajo y barras de herramientas.
Para dibujar el circuito electrónico se deben primero seleccionar el modo componentes
“Component.” y seleccionar el botón “P” de búsqueda de componentes “Pick Devices” en las
bibliotecas.
Comandos de
Fichero e
Impresión
Comandos de
Visualización
Barra de
Menús
Comandos
de Edición
Ventana de Edición
Herramientas
de Diseño
Ventana de componentes y
Biblioteca
Modos de Trabajo
Herramientas de
Diseño Electrónico
Comandos de dibujo
Comandos de rotación
y reflexión
Barra de simulación
Barra de estado
Ventana de Trabajo
Component.
Pick Devices

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 6
Ventana de Edición
Se abre un menú asociado a la búsqueda de componentes. Se busca el componente de dos
maneras diferentes por categorías o poniendo el nombre o palabra clave en la ventana
Keywords (Ejemplo: DAC0808_JOAN)
Al localizar el componente adecuado se realiza una doble pulsación y
aparecerá en la columna de dispositivos “DEVICE”. Se puede realizar esta
acción tantas veces como componentes se quiera incorporar al esquema. Una
vez finalizado el proceso se cierra la ventana de
búsqueda de componentes.
Antes de situar los componentes en la “Ventana de trabajo” se pude
comprobar la orientación en la “Ventana de Edición” y rotarlos con los
“Comandos de Edición”.
Una vez seleccionado el componente en
la “Columna de Dispositivos” se pincha sobre la
“Ventana de Trabajo” y este se posiciona. Si pulsamos más veces sobre dicha ventana se
insertaran componentes con una referencia automática. (Tiene que
estar activa para ello seleccionar TOOLS àReal Time Anotation).
Si pasamos el ratón por encima del componente, aparece una
“X” en la patilla del componente, esto nos indica que podemos tirar hilo
hasta la siguiente pata de otro o el mismo componente.
Permite localiza los
componentes por nombre
Muestra el resultado de la búsqueda de los
componentes a que bibliotecas pertenecen y
una descripción breve de cada uno de ellos
Permite localiza los
componentes por categoría,
clase y fabricante
Represente el símbolo del
Componente en ISIS y si
está simulado
Represente el encapsulado
del Componente en ARES
es decir su encapsulado
Comandos de Edición
Columna de Dispositivos
DEVICE
Recorrido del Ratón

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 7
Una vez situado los componentes en la “Ventana de Trabajo” se pueden mover, rotar,
copiar, borrar. Para ello se seleccionan con el botón derecho del ratón (Se ponen en rojo) y se
seleccionan los “Comandos de Edición” en “Herramientas de Grupo” ó “Comandos de
rotación y reflexión “ para un solo elemento.
Cada componente electrónico se puede editar, se selecciona con el botón derecho del ratón
(Se pone en rojo) y con el botón izquierdo se abre.
Rotar un conjunto de componentes
Se puede cambiar su referencia y valor Se puede ocultar referencias,
Valores, etc.
Se puede cambiar de encapsulado
Se puede excluir de la simulación Se puede excluir del diseño de la placa
Rotar un solo componente

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 8
Para la unión de diferentes componentes “Sin Cables” se pueden utilizar el Icono “Inter-sheet-
Terminal” de la caja de Herramientas de Diseño. Este abrirá una ventana donde
aparecen los diferentes terminales.
Si queremos unir cables en forma de bus se utiliza el Icono de la caja de Herramientas de
Diseño y etiquetarlos con el icono del Modo de Trabajo .
Terminal Bidireccional
Terminal por defecto
Terminal de masa
Terminal de salida
Terminal de Alimentación
Terminal de entrada
Terminal bus
Etiquetado de Cable Etiquetado de bus
Terminal de Alimentación
Terminal de masa Terminal de salida
Terminal de entrada

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 9
Se pueden introducir Generadores de señal, Voltímetros, Osciloscopios, etc. Utilizando los
iconos de las Herramientas de Diseño.
1.1.3.- Depuración de programas.
Una de las características importantes del PROTEUS
VSM es la capacidad de depurar programas fuentes de
distintos lenguajes de programación (Lenguajes
ensamblador, C , Basic, etc). La herramienta que se
utiliza está en la barra de tareas llamada “Source”
Inter-sheet-Terminal (Terminales) Device Pin (Patillas de Componentes)
Simulation Graph (Simulación Gráfica) Tape Recorder (Grabadora)
Generator (Generador) Voltaje Probe (Sondas de Tensión)
Current Probe (Sondas de Corriente) Virtual Instruments (Instrumentos Virtuales)
Osciloscopio
Voltímetro (CA) Generador de Tensión Sinusoidal

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 10
Con la opción añadir o remover ficheros fuentes “Add/Remove Source files” introducimos los
fichero fuentes que queremos añadir a nuestro hardware y elegimos la herramienta de
compilación (Programa que traduce un lenguaje de programación a código Binario)
Con la opción “Define Code Generation Tools” podemos introducir nuevos compiladores y
depuradores de programas.
Herramienta de Compilación
Ficheros Fuente
Cambiar el Fichero Fuente
Nuevos Ficheros Fuente Quitar Ficheros Fuente
Se introduce el Compilador C de
CCSC para uC PIC dentro del
Proteus
Generador de Ficheros
Se introduce el Depurador de
Programas en el Proteus

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 11
Con la opción “Setup External Text Editor” podemos elegir el Editor de Texto.
La opción Build All compila el programa fuente ejecuta el programa que traduce un lenguaje
de programación a código Binario.
Si hemos utilizado el editor de texto del Compilador CCSC este nos permite depurar el
programa y ver los errores. Abrimos el Fichero “Dec_Hex_Bin.c” y ejecutamos el Icono
“Compile”
Al compilar se genera varios ficheros (ERR, HEX, SYM, LST, COF, PJT, TREE, STA) . El fichero con
“Dec_Hex_Bin.COF”, nos permite depurar el Programa en el Proteus y el fichero
“Dec_Hex_Bin.HEX” es el código binario que se introduce de forma real al uC PIC.
Editor de texto del Compilador CCSC Editor de texto del Proteus
Compila un fichero no un proyecto

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 12
La forma de introducir el fichero “Dec_Hex_Bin.COF” en un microcontrolador uC PIC
es seleccionar lo con el botón derecho del ratón (El uC PIC se pondrá en color rojo) y pulsar el
botón izquierdo. Se abrirá una ventana contextual e introduciremos el fichero.COF.
Una vez cargado del microcontrolador con el programa fuente “ Dec_Hex_Bin.COF” , se puede
proceder a la simulación del circuito empleando la Barra de Simulación.
Pulsar con el botón derecho del ratón y
después con el botón izquierdo
Pulsar con el botón Izquierdo
del ratón y buscar el
fichero.COF deseado
La frecuencia del reloj se fija
aquí independientemente
del hardware que se utilice
externamente (Cristal de
Cuarzo)
Marcha Paso a Paso Pausa Stop

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 13
Con la opción Marcha la simulación se inicia (el botón se vuelve verde) y funciona en modo
continuo. La simulación no es en tiempo real.
Con la opción Stop la simulación se para.
Con la opción Paso a Paso permite trabajar en tramos de tiempo predefinidos, permitiendo
utilizar herramientas de depuración. Esta opción está asociada a la configuración de
Animación, que está en la Barra de Menús en SYSTEMà Set Animation Options.
La opción SPICE Options define las características de simulación del
sistema. Son parámetros que podemos manipular para obtener más
precisión en la simulación (No se aconseja tocar si se desconocen)
Si disminuimos los parámetros RELTOL, GMIN y PIVTOL el sistema
converge antes, pero es menos preciso.
Aquí , ya se puede simular (Animar) un sistema con microcontroladores .Lo más
interesante de una simulación es la utilización de las herramientas de depuración que
contiene este sistema de desarrollo.
A estas herramientas se accede pulsando primero Pausa de la Barra de Tareas y
después Debug de la Barra de Menús.
Número de veces que la pantalla
de ISIS se refresca en 1 Segundo
Tiempo de simulación por cada uno
de los Frames (Suele ser el valor
inverso a Frames per Second)
Incremento de tiempo que se
desea cada vez que se pulsa la
tecla Paso a Paso
Si los valores en la simulación son inferiores a
estos valores, no se visualizan los efectos de
Animation Options
Se muestra las corrientes y
tensiones de las puntas de
prueba que tengamos en el
circuito
Se muestra en las patillas de
circuitos de Lógica Digital
unos cuadrito de color
rojo “1” o azul “0”
Los cables de los
esquemas toman
diferentes colores
en función de la
intensidad que
pasen por ellos.
Se muestran en los cables de los
esquemas el sentido de las Intensidades.

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 14
La ventana Watch Window es la más
versátil se pueden añadir variables propias y
del uC y visualizarlas en plena simulación.
Barra de Simulación
Ejecución de un programa sin puntos de ruptura.
Ejecución de un programa hasta un tiempo determinado
Herramientas de Ejecución de
un programa Paso a Paso
Visualización de las variables creadas por el usuario y las
propias del microcontrolador, con la simulación en marcha.
Visualización de los registros del uC utilizando las
herramientas de ejecución paso a paso.
Visualización de las variables del sistema mientras se están
utilizando las herramientas de ejecución paso a paso.
Visualización del programa fuente para poder utilizar las
herramientas de ejecución paso a paso.
Visualización de la memoria de datos del uC utilizando las
herramientas de ejecución paso a paso.
Visualización de la memoria
EPROM del uC utilizando las
herramientas de ejecución
paso a paso.
Visualización de la memoria de
Programa del uC utilizando las
herramientas de ejecución paso
a paso.
Visualización de la memoria
Pila del uC utilizando las
herramientas de ejecución
paso a paso.

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 15
Si se pincha con el botón derecho del ratón sobre la ventana Watch Window aparece un
menú contextual siguiente:
Permite añadir variables del uC PIC
Permite añadir variables propias
Permite poner puntos de ruptura al programa
en función de determinadas variables
Permite seleccionar todas las variables
Buscar variables
Indica el Tipo de variables (Tiene que estar
seleccionada la variable)
Muestra el formato de la variables
Binario, Decimal, Hexadecimal, etc.
(Tiene que estar seleccionada la
variable)

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 16
Si queremos ejecutar un programa en modo depuración, tenemos que realizar los siguientes
pasos:
1.- Crear una carpeta para contener el hardware y el software “Representación en
Binario, BCD, Hexadecimal”
2.- Crear un Sistema Microprocesado con PIC en la ventana de trabajo de ISIS
3.- Generamos un programa en C “Dec_Hex_Bin.c” desde Source àADD/Remove
Source filesàNew.
4.- Compilamos el Programa desde CCSC. (Se genera el fichero. COF
“Dec_Hex_Bin.COF”)
5.- Introducimos el fichero.COF “Dec_Hex_Bin.COF” dentro del uC PIC.
6.- Ejecutamos Paso a Paso ó Pause de la Barra de Simulación.
7.- Pinchamos Debug y abrimos las ventanas siguientes:
· Watch Windows
· PIC CPU Source Code - U1
· PIC CPU Variables - U1
· PIC CPU Registers - U1
8.- Ejecutamos paso a paso el programa desde PIC CPU Source Code - U1 utilizando las
Herramientas de Ejecución y visualizamos como
varían las variables y el hardware. Es conveniente
poner puntos de ruptura y ejecutar de golpe el programa hasta dicho punto.
El triangulo indica la instrucción que se va a ejecutar

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 17
1.2.- Ares (Diseño de Placas).
En este manual de ARES se mostrará los pasos básicos para realizar el rutado de una
placa PCB, no se pretende enseñar de forma precisa el manejo del programa pero sí las
funciones principales del mismo. Pasos a seguir:
1.2.1.- Diseño de un esquema con ISIS.
Buscar componentes que tengan el encapsulado o huella (PCB)
Simulación en modo continuo, no
permite ver las ventanas de depuración
a excepción de Watch Window
Ejecuta una instrucción,
subrutina ó función de
golpe
Permite ejecutar una instrucción. Si es
una subrutina o una función entra
dentro de ella.
Trabaja de modo continuo hasta que
encuentra un retorno de cualquier
subrutina o función y sale de ella.
Trabaja de modo continuo
hasta que encuentra un
punto de ruptura.
Habilita o deshabilita
los punto de ruptura.
Encapsulado(PCB)
Componente a buscar

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 18
Dibujamos el esquema.
Antes de realizar la placa comprobar si algún componente tiene pines o patillas ocultas. Los
Circuitos Integrados ocultan los pines de masa “GND, VSS” y alimentación “VCC , VDD”.
Editamos el Componente
Si está la pestaña Hidden Pins
indica que existen patillas
ocultas

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 19
Vemos que patillas están ocultas pinchando
sobre las pestana “Hidden Pin “
Para que estas patillas “GND ó VCC” se conecten en un circuito real, se tienen que
etiquetar los cables donde queremos unir. Seleccionamos de la barra Modos de Trabajo el
icono etiquetado de cable “Wire Label”
Buscamos una Masa ó Tierra “GROUND”. Seleccionamos el cable que está unido a ella con el
botón derecho del ratón (Se pone rojo) y pulsamos el botón izquierdo. Se abre un menú
contextual y escribimos GND.
E
Patillas ocultas
Modos de Trabajo
Etiquetado de Cable
Wire Label
Buscamos una masa
GND y seleccionamos
el cable con el botón
derecho del ratón.
Se abre el menú
contextual y
escribimos GND.

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 20
Buscamos el positivo de la “Pila de 5V”. Seleccionamos el cable que está unido a ella con el
botón derecho del ratón (Se pone rojo) y pulsamos el botón izquierdo. Se abre un menú
contextual y escribimos VCC.
El resultado es el siguiente:
Buscamos el positivo de la pila de 5V y seleccionamos el
cable con el botón derecho
del ratón.
Se abre el menú
contextual y
escribimos VCC.
Nota: Cuando etiquetamos
con VCC el cable la simulación no funciona
Todos los componentes tienen que
tener nombre (Ejemplo: R1, E2, etc ),
si no lo tuvieran no aparecerían en el
diseño de la placa.

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 21
1.2.2.- Generación del listado de conexiones “Netlis to Ares”.
Pulsamos el icono de Herramientas de Diseño “ARES”
Si algún componente no tuviera máscara te pediría que la insertaras, aparece un menú
contextual:
Después de asignar las máscaras a los componentes que no las tenían aparece la Aplicación
ARES
Herramientas de Diseño
Herramienta de diseño de placas PCB
ARES
Seleccionamos el Encapsulado Dentro de una Biblioteca de
componentes
Pulsamos con el botón izquierdo del
ratón y aparecerá aquí
Componente sin encapsulado
Aparecen todos los componentes
que tienen encapsulado para el
diseño de placas

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 22
1.2.2.1.- Entorno de Trabajo
1.2.3.- Creación del tamaño de la placa de PCB.
Una vez situados los componentes en el Selector de objetos “Object Selector” con las
Herramientas de diseño gráfico “2D Graphics” seleccionamos la cuadrado “2D Graphics box”
Barra de Menús
Comandos de archivos y
de Impresión
File/Print Commands
Comandos de Visualización
Display Commands
Comandos de Edición
Editing Commands
Herramientas de Diseño
Layout Tools
Herramientas de Posicionamiento y Rutado
Placing & Routing
Herramientas de emplazamientos de PAD
Pad Placement
Herramientas de diseño gráfico
2D Graphics
Herramientas de Rotación y Reflexión
Rotation & Reflection
Barra de Estado Test de errores
Selector de Caras
Layer Selector
Ventana de Edición
Selector de Objetos
Object Selector
Ventana de
Trabajo
Herramientas de diseño gráfico
2D Graphics
Cuadrado
2D Graphics box

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 23
Con el Selector de Caras “Layer Selector” seleccionamos borde de placa “Board Edge”
Con el ratón nos situamos en la Ventana de Trabajo y dibujamos el tamaño de la placa.
Ponemos las cotas y los agujeros para sujetar la placa a un soporte.
Para poner los agujeros para sujetar la placa a un soporte buscamos en Herramientas de
diseño gráfico “2D Graphics” seleccionamos el circulo “2D Graphics circle”
Con el Selector de Caras “Layer Selector” seleccionamos borde de placa “Board Edge”
Con el ratón nos situamos en la Ventana de Trabajo y dibujamos el circulo.
Selector de Caras
Layer Selector
Borde de placa
Board Edge
Borde de placa
Board Edge
Agujeros para
sujetar la placa
a un soporte
Cotas
Herramientas de diseño gráfico
2D Graphics
Cuadrado
2D Graphics circle
Selector de Caras
Layer Selector
Borde de placa
Board Edge

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 24
Para poner las Cotas, elegiremos si queremos trabajar en pulgadas o en milímetros. Si
queremos milímetros vamos a los Comandos de Visualización y pinchamos sobre el icono
“Select Metric/ Imperial Coordinates”
Se visualiza en la parte baja derecha de la Ventana de trabajo.
Estas coordenadas X/Y son con respecto a el punto de origen que está en
el centro de la Ventana de trabajo
Si queremos resolución a la hora de dibujar
(Pistas, Cotas, Tamaños de Placa, etc.), tenemos que
cambiarla, para ello vamos a la Barra de Menús y
seleccionamos VIEW y cambiamos dicha resolución.
Una vez realizado los ajustes adecuados, procedemos a poner las cotas. Para ello,
buscamos en Herramientas de diseño gráfico “2D Graphics” y seleccionamos Cotas
“Dimension object placement”
Con el Selector de Caras “Layer Selector” seleccionamos borde de placa “Board Edge”
Con el ratón nos situamos en la Ventana de Trabajo y dibujamos las Cotas.
Selector de Caras
Layer Selector
Borde de placa
Board Edge
Herramientas de diseño gráfico
2D Graphics
Cotas
Dinension object placement
Comandos de Visualización
Display Commands
Milímetros/Pulgadas
Select Metric/ Imperial Coordinates
Coordenadas X/Y en mm

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 25
1.2.4.- Posicionamiento de los componentes dentro de la placa.
Existen dos posibilidades a la hora de situar los componentes.
1.2.4.1.- Posicionamiento Automático.
Seleccionar en las Herramientas de Diseño “Layout Tools” el icono Posicionamiento
Automático dentro de la Placa “Autoplace the components onto the board”.
Se abre este menú contextual marcamos las reglas de diseño y seleccionamos los
componentes que queremos posicionar de forma automática.
No obstante se puede posicionar determinados componentes de forma manual y el resto de
forma automática.
Herramientas de Diseño
Layout Tools
Posicionamiento Automático dentro de la Placa
Autoplace the components onto the board
Marcamos que componentes queremos
posicionar de forma automática
Reglas de Diseño y Peso
Restaurar valores

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 26
1.2.4.2.- Posicionamiento Manual.
Seleccionamos el icono de Edición y situación de componentes “Component
placement and editing” de Herramientas de Posicionamiento y Rutado “Placing & Routing” y
aparecen los componentes de diseño de la placa en ISIS.
Situamos los componentes en la placa, para ello posicionamos el ratón sobre la placa y
pulsamos el botón izquierdo del ratón y el componente que este marcado en azul en el
Selector de Objetos “Object Selector” se insertara en la placa.
Componentes de diseño
de la placa en ISIS
Herramientas de Posicionamiento y Rutado
Placing & Routing
Edición y situación de componentes
Component placement and editing
Selector de Objetos
Object Selector
Uniones entre componentes
Netlis

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 27
Los componentes puestos en la placa se pueden mover, cortar, copiar, etc con los
Comandos de Edición (Conjunto de componentes) y las Herramientas de Rotación y Reflexión
(Un solo componente). Se seleccionan el ó los componentes con el botón derecho del ratón
(Se ponen en rojo) y después se selecciona la herramienta que queremos utilizar (Rotar,
mover, etc).
1.2.5.- Rutado de la pistas.
Existen dos posibilidades a la hora de realizar el ruteado. Pero antes de rutar, podemos marcar
las estrategias de diseño. Para realizarlo nos vamos a la Barra de Menú y seleccionamos
System àSet_Strategies
Marcamos las estrategias para pistas de potencia y para pistas de señal.
Comandos de Edición
Editing Commands
Herramientas de Rotación y Reflexión
Rotation & Reflection
Rotación a Derecha de un componente (90º)
Rotación a Izquierda de un componente (-90º)
Reflexión a Derechas de un componente
Reflexión a Izquierda de un componente
Rotación de un conjunto de componente Mover un conjunto de componente
Copiar un conjunto de componente Borrar un conjunto de componente
Deshacer o rehacer operaciones realizadas
Pistas de Potencia
Optimizar las
esquinas
Tácticas de rutado
Tipo de Vías
Normales
Ciegas Superiores
Ciegas Inferiores
Ocultas
Reglas de diseño
Distancia mínima entre PADs .
Distancia mínima entre PAD y Pista .
Distancia mínima entre Pista .
Distancia mínima a Gráficos.
Distancia mínima al Borde de la Placa o
Ranuras.
Tamaño de
las Pistas
Tamaño de
las Vías
Tipo de
prioridad
Tamaño de
las Vías
Tipo cuello
Pistas
Horizontales
y Verticales.
Se trazan
por las
Capas
Superiores

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 28
1.2.5.1.- Rutado Automático.
Seleccionar en las Herramientas de Diseño “Layout Tools” el icono Diseño automático de
pistas “Autorouter the conections specified by de ratsnest”.
Se abre este menú contextual marcamos las reglas de diseño y seleccionamos los
componentes que queremos posicionar de forma automática.
Pistas de Señal
Pistas
Horizontales
y Verticales.
Se trazan
por las
Capas
Inferiores
Herramientas de Diseño
Layout Tools
Diseño automático de pistas especificadas por las conexiones
Autorouter the conections specified by de ratsnest
Opciones de Rutado
Permiso de rutado
Permiso de Ordenamiento
Protección manual de las pistas
trazadas manualmente
Son las estrategias de la Barra de
Menú seleccionando System y
Set_Strategies

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 29
El diseño quedaría:
1.2.5.2.- Rutado manual.
Para el rutado manual tenemos las Herramientas de Posicionamiento y Rutado Placing &
Routing
Edición y situación de componentes
Component placement and editing
(Componentes del Diseño)
Edición y situación de las mascaras
Package placement and editing
(Nos permite editar los encapsulados y
añadir otros tipos de encapsulados
que no son del proyecto).
(Abre el director de Biblioteca de
encapsulados)
Selecciona el Tipo de Pistas
Track placement and editing
Selecciona el Tipo de Vías
Via placement and editing
Planos de Masa o Alimentación
Zone placement and editing
Herramientas de Posicionamiento Placing & Routing

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 30
Si queremos tirar pistas por la cara de abajo de la placa procedemos de la siguiente manera:
Seleccionamos el Tipo de Pistas “Track placement and editing”
Con el Selector de Caras “Layer Selector” seleccionamos pistas de tipo Bottom Cooper
Con el ratón nos situamos en la Ventana de Trabajo y dibujamos la pista de una patilla a otra
siguiendo las uniones entre componentes “Netlis”.
Selector de Caras
Layer Selector
Tipo de Pista
Botton Cooper
Selecciona el Tipo de Pistas
Track placement and editing Herramientas de Posicionamiento
Placing & Routing

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 31
Si queremos tirar pistas por la cara de abajo, pasar por una vía y tirar pistas por la capa de
arriba procedemos de la siguiente manera:
Seleccionamos el Tipo de Pistas “Track placement and editing”
Con el Selector de Caras “Layer Selector” seleccionamos pistas de tipo Bottom Cooper
Con el ratón nos situamos en la Ventana de Trabajo y dibujamos la pista “Bottom Cooper “ de
una patilla a otra siguiendo las uniones entre componentes “Netlis”, pulsas dos veces con el
botón izquierdo del ratón según estas trazando la pista, sale una “VÍA” y las pistas pasan a ser
“Top Cooper”, seguimos trazando la pista y si pulsas otras dos veces con el botón izquierdo del
ratón sale una “VÍA” y las pistas pasan a ser “Bottom Cooper”.
Otra forma más fácil es poner “VÍA” y trazar las pistas con Bottom ó Top
Cooper .
Selector de Caras
Layer Selector
Tipo de Pista
Bottom
Selecciona el Tipo de Pistas
Track placement and editing
Pista Bottom Cooper
Pista Bottom Cooper
VIA
Selecciona el Tipo de Vias
Via placement and editing
Tamaño de la VIA
Herramientas de Posicionamiento Placing & Routing

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 32
Si queremos que una determinada zona de una cara sea un plano de masa o alimentación
podemos utilizar Zone placement and editing de las Herramientas de Posicionamiento y
Rutado Placing & Routing
Con el Selector de Caras “Layer Selector” seleccionamos pistas de tipo Bottom Cooper
Con el ratón nos situamos en la Ventana de Trabajo y dibujamos la Zona que queremos de
cobre. Aparece un menú contextual donde decimos tamaño de la zona de cobre, Zonas de
clareo, etc.
La placa queda:
Planos de Masa o Alimentación
Zone placement and editing
Herramientas de Posicionamiento Placing & Routing
Tipo de Zona
Top Cooper
Selector de Caras
Layer Selector
Clareo
Tamaño de las Zona
de Cobre

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 33
Si queremos cambiar el tamaño o la forma de los PAD de un determinado componente
utilizar herramientas de emplazamientos de PAD “Pad Placement”
Seleccionamos el tipo de PAD.
Pinchamos el PAD de un componente de nuestro circuito y este se sustituye.
PAD Redondo
Herramientas de emplazamientos de PAD
Pad Placement
PAD Cuadrado
PAD tipo DIL
Tamaño del PAP Tipo de PAP
Tamaño del PAP S50-25
Tamaño del PAP S90-50

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 34
Utilizando las herramientas de diseño de placas que nos proporciona ARES tenemos como
resultado el siguiente circuito:
1.3.- Creación de símbolos en ISIS y encapsulados en ARES.
1.3.1.- Creación de una biblioteca de encapsulados en ARES.
Para crear una Biblioteca propia en ARES, se deben primero seleccionar el modo de edición y
situación de componentes “Package placement and editing.” y seleccionar el botón “L”
de manejo de Bibliotecas “Manage Libraries”.
Se abre un menú contextual, donde podemos crearnos nuestra propia Biblioteca, añadir
encapsulados de otra Biblioteca, borrar encapsulados, etc.
Herramientas de Posicionamiento y Rutado
Placing & Routing
Edición y situación de los Encapsulados
Package placement and editing
Manejo de Bibliotecas
Manage Libraries

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 35
Cuando pulsamos “Create Library” tenemos que dar un nombre a la biblioteca
“Robótica_ARES” y donde queremos crear la biblioteca “C:\Archivos de Programa\Labcenter
Electronic\Proteus 6 Professional\Library”.
Pulsamos “OK” y la biblioteca se crea. En la biblioteca nueva “Robótica_ARES”, podemos
copiar componentes “CONN-DIL8” de otras bibliotecas ”CONNECTORS”. Seleccionamos el
encapsulado y damos al icono de copiar “Copy Items”
Creación de una Biblioteca
Nos pedirá un número
máximo de Encapsulados.
Máximo 4000

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 36
1.3.2.- Creación de un encapsulado en ARES.
a) Dibujamos el componente sin PAD.
Abrimos el ARES y seleccionamos Herramientas de diseño gráfico “2D Graphics”.
Con el Selector de Caras “Layer Selector” seleccionamos borde de encapsulado “Top Silk” y
dibujamos el encapsulado.
Biblioteca
Robótica_ARES
Confirmación
de copia
Herramientas de diseño gráfico
2D Graphics
Selector de Caras
Layer Selector
Borde de Encapsulado
Top Silk

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 37
b) Le añadimos los PAD.
Seleccionamos PAD Redondo de las Herramientas de emplazamiento de PAD
“Pad Placement “ los insertamos en el encapsulado dibujado.
c) Editamos el PAD (Poner un número)
Seleccionamos el PAD con el botón derecho del ratón del ratón “El PAD se pone blanco” y
pulsamos el izquierdo. Numeramos el PAP “U” con “1”.
d) Hacer el encapsulado y almacenarlo.
Seleccionamos el encapsulado con el botón derecho del ratón (se pone en blanco), pinchamos
sobre el icono de realizar un encapsulado “Make Package” de los “Comandos de edición”
Herramientas de emplazamientos de PAD
Pad Placement
PAD Redondo
Tamaño del PAP
Numeramos el PAP
Comandos de Edición
Editing Commands
Hacer el encapsulado
Make Package

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 38
Aparece un menú contextual y escribimos el nombre de la huella “MOTOR-TRI_ROBOTICA” su
categoría “Connectors”, tipo de agujero de PAD “agujero pasante” “Through Hole” y la
biblioteca donde se almacena “Robótica_ARES”
e) Deshacer el encapsulado y almacenarlo.
Seleccionamos el encapsulado con el botón derecho del ratón (se pone en blanco), pinchamos
sobre el icono de deshacer encapsulados. “Decompose” de los “Comandos de edición”
Variamos el encapsulado, lo seleccionamos con el botón derecho del ratón y volvemos
almacenarlo pulsando Make Package
Nombre del
Encapsulado
Tipo de agujero del
PAD
Biblioteca donde se
almacena
Categoría
Comandos de Edición
Editing Commands
Deshacer el Encapsulado
Decompose

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 39
1.3.3.- Creación de una biblioteca de símbolos en ISIS.
Para crear una biblioteca propia en ISIS, se deben primero seleccionar el modo
componentes “Component.” y seleccionar el botón “L” de manejo de
bibliotecas “Manage Device Libraries”.
Se abre un menú contextual ,
donde podemos crearnos nuestra
propia biblioteca, añadir símbolos
de otra biblioteca, borrar
símbolos, etc.
Cuando pulsamos “Create Library” tenemos que dar un nombre a la biblioteca “Robótica_ISIS”
y donde queremos crear la biblioteca “C:\Archivos de Programa\Labcenter Electronic\Proteus
6 Professional\Library”.
Component.
Manage Device Libraries
Creación de una Biblioteca
Nos pedirá un número
máximo de simbolos.
Máximo 4000

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 40
Pulsamos “OK” y la biblioteca se crea. En la biblioteca nueva “Robótica_ISIS”, podemos copiar
componentes “2N2907” de otras bibliotecas ”Bipolar”. Seleccionamos el encapsulado y
damos al icono de copiar “Copy Items”
Biblioteca
Robótica_ISIS
Confirmación
de copia

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 41
1.3.4.- Creación de un símbolo en ISIS.
a) Dibujamos el componente sin patillas.
Abrimos el ISIS y seleccionamos “Comandos de Dibujo”
b) Le añadimos pines ó patillas.
Seleccionamos Patillas de Componentes “Device Pin“ de las Herramientas de Diseño
Ponemos los pines en el dibujo realizado, teniendo en cuenta lo siguiente:
· Que los caracteres no estén excesivamente próximos al pin (El pin no conectará con el hilo si esto ocurre y habría que descomponer el componente y modificarlo).
· Que el tipo de de rejilla sea mayor de Snap 50th (Ver View de la Barra de Menús), para poder insertar el hilo de forma más cómoda.
c) Editamos el pin (Poner el nombre y número)
Seleccionamos el pin con el botón derecho del ratón del ratón “El pin se pone rojo” y
pulsamos el izquierdo. Nombramos al Pin “U” y lo numeramos “1”.
Comandos de Dibujo
Herramientas de Diseño
Patillas de Componentes
Device Pin
Tipo de Pin

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 42
d) Hacer el símbolo y almacenarlo.
Seleccionamos el símbolo con el botón derecho del ratón (se pone en rojo), pinchamos sobre
el icono de realizar un dispositivo “Make device” de los “Comandos de edición”
Aparece un menú contextual y escribimos el nombre del componente “MOTOR-TRI_ROBOTICA”
y un parámetro de referencia “M”.
Nombre
Número
Comandos de
Edición
Make device

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 43
Pulsamos “Next” aparece otra ventana donde podemos asignarle el encapsulado físico (Si esta
creado lo asignamos, se puede no asignar y pasar a la siguiente ventana contextual). Pulsamos
añadir encapsulado Add/Edit .
Aparece un menú contextual donde pulsamos añadir el encapsulado
Añadir Encapsulado
Añadir Encapsulado

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 44
Aparece otro menú contextual que abre el ARES y elegimos el encapsulado adecuado.
Aparece otro menú contextual en el que podemos añadir pines y poner este encapsulado
como principal.
Elegimos el encapsulado adecuado
MOTOR-TRI_ROBOTICA
Ponemos la palabra
clave MOTOR y aparecen
diferentes motores
Vista del encapsulado
Añadir Pines
Encapsulado por defecto
Usar Bibliotecas de
ARES

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 45
Si pulsamos asignación de huella “Assign Package(s)” esta queda asignada al símbolo de ISIS
Se abre otro menú contextual donde se puede introducir el modelo de componte simulado

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 46
Se abre otro menú contextual donde se puede introducir un documento donde se especifique
sus características “Data Sheet”
Se abre otro menú contextual donde se le asigna categoría, Biblioteca.
Introducción del
Documento
Categoría
Biblioteca

Curso de Robótica y otras aplicaciones en el Aula de Tecnología
IES Joan Miró Página 47
e) Deshacer el símbolo y almacenarlo.
Seleccionamos el símbolo con el botón derecho del ratón (se pone en rojo), pinchamos sobre
el icono de deshacer un dispositivo “Decompose” de los “Comandos de edición”
Variamos el simbolo, lo seleccionamos con el botón
derecho del ratón y la volvemos almacenarlo pulsando
Make Device
2.- Principios de funcionamiento de un Microcontrolador PIC.
Antes de definir un sistema digital basado en microcontroladores habría que definir un
sistema basado en microprocesadores.
Un microprocesador es básicamente un chip que contiene la CPU (Central Proccesing
Unit) que se encarga de controlar todo un sistema. Un sistema digital basado en un
microcontrolador es un sistema abierto ya que su configuración difiere según a la aplicación a
la que se destine. Se pueden acoplar los módulos necesarios para configurarlo con las
características que se desee. Para ello se saca al exterior las líneas de sus buses de datos,
direcciones y control de modo que permita su conexión con la memoria y los módulos de
entrada/ salida. Finalmente resulta un sistema implementado por varios circuitos integrados
dentro de una misma placa de un circuito impreso.
Comandos de
Edición
Deshacer el símbolo
Decompose
Top Related