






Idiomas
Páginas
Jurídico

Débora Rubio Soliva Procesos Digitales
Modelados en 3D utilizando la correlación fotogramétrica

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
2
Tabla de contenido
1. Introducción ................................................................................................................... 3
2. Principio de correspondencia de imagen. ............................................................ 4 2.1. Métodos de correspondencia ............................................................................................ 6 2.1.1. Correspondencia basada en intensidades ............................................................................. 6 2.1.2. Correspondencia basada en entidades ................................................................................... 7
2.2. Problemas y constreñimientos ......................................................................................... 7 2.3. Correspondencia multi-‐imagen ........................................................................................ 9
3. Tipos de instrumentos .............................................................................................. 11 3.1. Cámaras digitales ............................................................................................................. 11 3.1.1. Cámara teléfono móvil ........................................................................................................... 11 3.1.2. Cámara réflex ............................................................................................................................. 12
3.2. Requisitos del sistema ................................................................................................... 12 3.3. Tipos de software ............................................................................................................ 13 3.3.1. Autodesk 123D Catch ............................................................................................................. 13 3.3.2. Smart 3D Capture ..................................................................................................................... 14 3.3.3. Agisoft PhotoScan ..................................................................................................................... 15 3.3.4. PhotoModeler Scanner ........................................................................................................... 15
4. Aplicaciones actuales ................................................................................................. 16
5. Conclusiones ................................................................................................................. 19
8. Bibliografía ................................................................................................................... 21
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
3
1. Introducción El concepto de correlación de imagen, también llamado correspondencia de
imagen, de encaje o ajuste de imagen, se refiere al proceso de encontrar automáticamente detalles o entidades homólogas puntuales, lineales y superficiales en una o múltiples imágenes. Dichas entidades pueden hacer referencia a patrones sintéticos de imagen o a objetos del mundo real representados a partir de imágenes fotográficas, mapas o datos integrados en un SIG.
Las técnicas de correlación (matching) de imágenes digitales consisten en el
establecimiento automático de correspondencias entre elementos extraídos de dos o más imágenes digitales con un recubrimiento común. El término matching es el término más adecuado para expresar correlación entre imágenes digitales en fotogrametría. Dicha expresión puede ser traducida como el establecimiento de correspondencia entre los diversos conjuntos de datos nombrados anteriormente.
La correspondencia de imagen de objetos reales debe tener presente todos los
aspectos (externos e internos) que intervienen en el proceso de formación de la imagen fotográfica: la iluminación, la reflectancia, el sensor, la posición de captura y el modo de registro. Esto requiere una parametrización geométrica y radiométrica del modelo funcional, tanto más compleja cuanto menos sean los condicionamientos (constreñimientos) del modelo.
En Fotogrametría existen diversos procesos que pueden considerarse como un
matching, como por ejemplo la orientación interna, proceso en el que la imagen de una marca fiducial se correlaciona con un modelo bidimensional teórico de la fiducial; la orientación relativa y la transferencia de puntos en aerotriangulación, que consiste en la identificación de puntos homólogos en los fotogramas que forman el modelo; la orientación absoluta (externa), que pretende la identificación de los puntos de apoyo en el modelo; la generación de modelos digitales de elevaciones (MDE), mediante identificación de puntos homólogos una vez orientado el par, obtiene la información tridimensional derivada del modelo estereoscópico; y en el reconocimiento de formas y objetos.
La técnica del matching se ha convertido en un proceso esencial en visión por
ordenador para numerosas aplicaciones en una gran variedad de campos. A pesar del gran avance en este campo, y aunque la correlación de imágenes
funcione bien en determinadas aplicaciones y/o zonas, no siempre se obtienen resultados satisfactorios; por ello se siguen desarrollando algoritmos de correspondencia en ordenador.
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
4
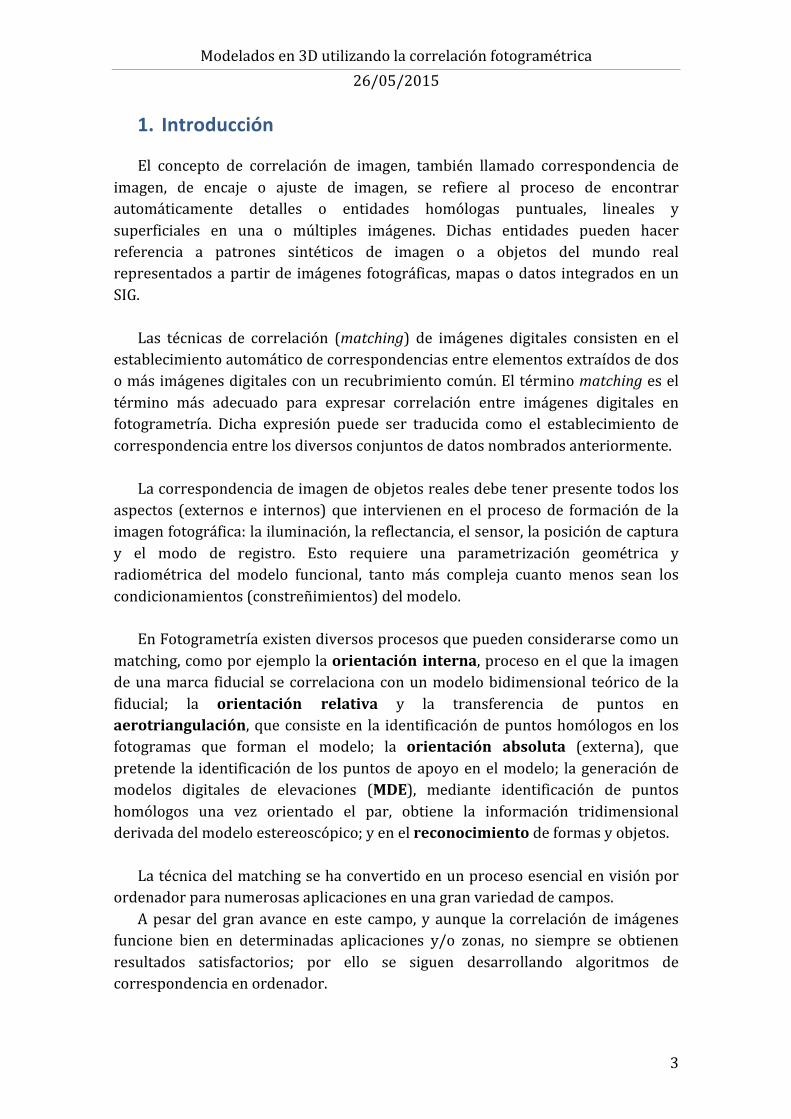
2. Principio de correspondencia de imagen.
Las entidades homólogas P y P’ de las imágenes l y l’ tienen por coordenadas (f, c, g) y (f’, c’, g’) respectivamente, y se pueden relacionar según (Förstner, T., 19931):
𝑓, 𝑐 = 𝑇!(𝑓!, 𝑐!; 𝑝!) 𝑔 = 𝑇!(𝑔!;𝑝! )
siendo: 𝑇! la función geométrica (espacial) que relaciona ambas imágenes según el vector de parámetros geométricos 𝑝! . 𝑇! la función radiométrica que relaciona ambas imágenes según el vector de intensidades 𝑝! .
Si unimos las funciones anteriores, llegamos al modelo completo de correspondencia de imagen:
Fig. 1. Modelo de correspondencia entre dos imágenes de un mismo objeto
La mayoría de técnicas de correspondencia de imagen utilizan un número discreto de entidades en la determinación de ambas funciones. La solución siempre se basa en las funciones de intensidad g y g’, o en los atributos a y a’ de las entidades puntuales, líneas y superficiales:
𝑃 = 𝑃 𝑓, 𝑐;𝑎 𝑃! = 𝑃′(𝑓!, 𝑐!;𝑎!) derivadas a partir de las funciones de intensidad del vecindario. En muchos casos, la correspondencia de imagen no se realiza con la imagen
digital pura, sino con una imagen simplificada y procesada, que permite 1 Förstner, W., & Gülch, E. (1987, June). A fast operator for detection and precise location of distinct points, corners and centres of circular features. In Proc. ISPRS intercommission conference on fast processing of photogrammetric data (pp. 281-‐305).

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
5
caracterizar aquellas entidades que interesa correlar (puntos, bordes, intersecciones de líneas, esquinas, etc). Por tanto, la extracción de estas entidades implica conocer el medio sobre el que se toma la imagen. Así mismo, la búsqueda de dichas entidades se aplica a múltiples imágenes y no solo a un par, ampliando así la redundancia y fiabilidad de los datos. La correspondencia de imagen sigue una serie de etapas bien diferenciadas, en
prácticamente todos los métodos:
1) Selección de entidades de imagen – puntuales, lineales o superficiales – en una, varias o múltiples imágenes. La selección de las entidades se realiza por medio de operadores de interés que generan listas de entidades susceptibles de correspondencia.
2) Asignación de entidades conjugadas en o entre imágenes. No sólo es necesario seleccionar oextraer entidades sino que se tienen que corresponder según criterios de similitud y de consistencia. La similitud se basa en los atributos de las entidades y por tanto, en las propiedades de la función de intensidad (valor radiométrico, posición, orientación, longitud, gradiente, etc); la consistencia es el grado de ajuste de los datos con respecto a un modelo objeto/terreno (global o parcial) base del reconocimiento y cartografiado.
3) Determinación de la posición 2D/3D de las entidades, bien sobre las imágenes y/o en el espacio objeto/terreno.
4) Valoración de la calidad de la correspondencia. La aceptación de la correspondencia viene fijada por criterios de precisión y fiabilidad.
Sin embargo, pueden variar de unos a otros las entidades, los criterios de
similitud/consistencia, los algoritmos y las funciones asociadas. Algunos métodos se basan incluso en la estructura del contenido de la imagen y por tanto, en una descripción relacional de las imágenes. La mayoría de los métodos de correlación consiste en los cuatro pasos
siguientes: • Detección de entidades: Objetos distintivos son manualmente o,
preferiblemente, automáticamente detectados. • Matching de entidades: La correspondencia entre las entidades
detectadas en la imagen es establecida. • Estimación en el modelo de transformación: Los parámetros son
calculados por medias de las entidades establecidas correspondientes. • Remuestreo de la imagen y transformación: las imágenes son
transformadas y los valores de las coordenadas de las imágenes son procesadas por técnicas de interpolación.

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
6
2.1. Métodos de correspondencia
Existen tres métodos de correspondencia de imagen:
a) Correspondencia basada en intensidades (CBI) – ‘intensity-‐based matching (IBM)’ o ‘area-‐based matching (ABM)’ -‐. Esta técnica se basa en el ajuste radiométrico de puntos o de superficies (con o sin referencia) en una o múltiples imágenes. La CBI que utiliza como criterio de similitud la correlación cruzada se denomina simplemente correlación, mientras que si se utiliza el procedimiento mínimo cuadrático se denomina correlación mínimo cuadrática.
b) Correspondencia basada en entidades (CBE) – ‘feature-‐based matching (FBM)’ -‐. En esta técnica las entidades obtenidas a partir de las imágenes originales (esquinas, intersecciones, segmentos rectos, etc) se utilizan en la comparación y determinación de entidades homólogas. Los criterios de similitud tienen en cuenta, entre otras cosas, la forma, el signo, la longitud y el gradiente.
c) Correspondencia basada en relaciones (CBR) – ‘relacional-‐based matching (RBM)’ -‐. A diferencia de los métodos mencionados, se basa en la detección topológica de estructuras y objetos definidos en bases de datos con descripciones de objetos. Las relaciones entre objetos vecinos son aspectos a considerar en este tipo de correspondencia.
Nos centraremos en los dos primeros, ya que la automatización del proceso de correspondencia se centra en ambos:
2.1.1. Correspondencia basada en intensidades El análisis de correspondencia basado en intensidades (CBI) asume que píxeles
homólogos tienen valores radiométricos similares. La idea consiste en comparar la distribución de niveles de grises de una pequeña subimagen, llamada ventana de referencia, en otras imágenes con el fin de encontrar las zonas conjugadas de máxima similitud. La búsqueda de zonas homólogas se realiza por medio de ventanas de ajuste o matching windows, que se desplazan por una ventana de búsqueda de mayor rango que el de la ventana de referencia. Existen muchos criterios de medida de similitud: la covarianza, las diferencias
absolutas de niveles de grises, la correlación cruzada, la correspondencia mínimo cuadrática, etc. La calidad del resultado depende de una seria de parámetros: -‐ Tamaño de la ventana de referencia -‐ Localización de la ventana de referencia -‐ Localización y tamaño de la ventana de búsqueda -‐ Criterio de aceptación -‐ Control de calidad

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
7
2.1.2. Correspondencia basada en entidades
La técnica de análisis de correspondencia basada en entidades (CBE) selecciona y extrae (individualmente), compara y asigna entidades conjugadas derivadas a partir de la información de las imágenes. En la práctica, tales entidades teóricamente puntuales, lineales y en menor medida superficiales son esquinas, intersecciones, bordes, elementos curvos, etc. y generalmente se obtienen por medio de operadores de interés. Se basa en dos pasos, la extracción y la asignación de entidades, esta última siguiendo las siguientes estrategias: -‐ Que la paralaje obtenida sea inferior a un cierto umbral. -‐ Que el criterio de similitud supere un cierto umbral. Por ejemplo, para el
coeficiente de correlación, un umbral oportuno es que 𝜌 ≥ 0,5. -‐ Que el criterio de unicidad también supere un cierto umbral. Una alta correlación conduce a una baja unicidad total, y viceversa.
Las ventajas de la CBE frente a la CBI son: -‐ Las ambigüedades en el análisis de correspondencia se reducen
significativamente tras el proceso de extracción de entidades. -‐ Las entidades son bastante estables con respecto a las influencias
radiométricas y geométricas. -‐ Suele ser más rápida: de las imágenes de entrada solo intervienen muestras
de datos previamente extraídas automáticamente, aunque depende siempre del tipo de software que utilicemos.
2.2. Problemas y constreñimientos La correspondencia de imágenes pertenece a la clase de problemas inversos de
naturaleza mal condicionada. Un problema está bien condicionado cuando existe solución, este es única y depende de los datos de entrada. Lamentablemente la correspondencia de entidades tiene como característica el no garantizar hallar la solución, que la solución sea única (en el caso de superficies transparentes o que nos encontremos con patrones repetitivos). El proceso de determinación de correspondencias de imagen suele producir
ambigüedades, sobre todo si no se emplean estrategias eficientes de asignación. Por ejemplo, en una imagen aérea digitalizada a 10 𝜇 contiene 529 millones de pixeles; si la imagen utiliza 8 bits/pixel y asumimos una distribución homogénea de pixeles, la probabilidad de encontrar un pixel con el mismo nivel de gris es de 1/256, lo que se traduce como buscar entre 2.066.406 pixeles, con lo cual vemos
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
8
que es prácticamente imposible la tarea de corresponder pixeles unitarios (por ambigüedad y mayormente por tiempo de proceso). Todo esto sería cierto si consideramos un recubrimiento de las imágenes
fotográficas total; si consideramos que las entidades homólogas tienen que localizarse en las zonas con solape del resto de imágenes, la búsqueda debe ceñirse a las áreas con recubrimiento. Por lo tanto, podemos decir que la búsqueda de entidades conjugadas es proporcional a la resolución de cada una de las imágenes ( resolución proporcional al tamaño de la imagen e inversamente proporcional al tamaño del píxel) y también lo es al porcentaje de recubrimiento. Hay que tener presente que las distorsiones causadas por la proyección central
y la orografía influyen en las tareas de medición y de reconstrucción. Las distorsiones de las imágenes (debidas a los defectos de calibración, efectos de refracción y esfericidad, ondulación del plano focal, etc) y/o la configuración de las diversas tomas fotográficas contribuyen a que las imágenes homólogas sean diferentes: pueden presentar problemas de distorsión, de afinidad e incluso, de proyectividad. No obstante, un tratamiento fotogramétrico adecuado de los datos disminuye o incluso elimina los problemas anteriormente mencionados. El ruido, los cambios de iluminación y las propiedades de reflexión entre
imágenes consecutivas también pueden alterar el proceso de correspondencia o de búsqueda automática de entidades conjugadas. En fotogrametría existen unas suposiciones que facilitan las tareas de correspondencia: -‐ Los niveles de gris de las imágenes se obtienen usando bandas espectrales
idénticas (o similares) -‐ La iluminación y los efectos atmosféricos son constantes durante la
adquisición. -‐ La escena que aparece en las imágenes es rígida (no deformable) -‐ La superficie es continua relativamente y opaca. -‐ Los valores que corresponden a la toma (distancias cámara-‐objeto,
recubrimientos tanto longitudinales como transversales, etc) se conocen muy aproximados.
Sin embargo, cada situación requiere sus suposiciones particulares, que
permiten acotar los problemas de correspondencia y abordarlos con seguridad. Existen multitud de algoritmos de correspondencia de imagen que contienen suposiciones sobre la escena o imagen a tratar. La solución al mal condicionamiento en la correspondencia de imagen pasa por
seleccionar entidades de imagen adecuadas, realizar suposiciones acertadas, escoger algoritmos y fijar constreñimientos en base a los conocimientos ya
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
9
sabidos. El estudio de modelos o procesos de generación de imagen permite formular constreñimientos geométricos para: 1. La localización de líneas epipolares (constreñimiento de línea epipolar) El número de candidatos de correspondencia se reduce analizando la geometría
de la toma. La geometría epipolar de una toma estereoscópica permite deducir lo siguiente: Constreñimiento epipolar: Un punto en una imagen izquierda x, encuentra su
homólogo en otra imagen derecha, x’, siguiendo su correspondente línea epipolar. Dicha línea se determina a partir de la intersección del plano epipolar con las respectivas imágenes fotográficas. De este modo, la búsqueda de un punto homólogo se reduce de un espacio bidimensional (toda la imagen homóloga) a un espacio unidimensional (línea epipolar) Si las tomas se normalizan, los puntos homólogos no presentan paralaje (los puntos coindicen fila a fila en las imágenes y la correspondencia de líneas epipolares se produce en dirección horizontal). Este constreñimiento se emplea en múltiples imágenes fotográficas, aumentando la fiabilidad del método y haciendo posible el desestimar homologías erróneas. 2. La unicidad de la asignación (constreñimiento de unicidad) 3. La compatibilidad de los valores de intensidad de imagen (constreñimiento
de compatibilidad radiométrica) 4. La similitud geométrica de ciertas entidades (constreñimiento de similitud
geométrica 5. Mantener el orden de los puntos proyectados en las imágenes
(constreñimiento de orden) Estos constreñimientos no solo permiten reducir el espacio de búsqueda de puntos homólogos, sino también el tiempo de procesado.
2.3. Correspondencia multi-‐imagen La correspondencia multi-‐imagen puede utilizar cualquiera de las técnicas de
análisis de correspondencia comentadas anteriormente. Realiza las tareas de correspondencia en dos o más imágenes, pudiéndose llevar a cabo secuencialmente mediante pares de imágenes o globalmente tomando todas las imágenes a la vez. Permite extraer la información durante la fase de adquisición de imágenes;
múltiples tomas posibilitan la desaparición de zonas oscuras. El número de correspondencias incrementa al aumentar el número de asignaciones derivadas de múltiples imágenes. Así podemos, en primer lugar, verificar correspondencias provenientes de un par de imágenes y en segundo lugar, reducir la proporción de asignaciones fallidas, siendo así las labores de reconstrucción de objetos más realistas.
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
10
El sistema podrá formarse de imágenes tomadas con la misma cámara o por medio de un sistema compuesto por múltiples cámaras. El proceso de correspondencia debe seguir una búsqueda bidimensional en cada una de las imágenes que intervienen, a no ser que las imágenes sean epipolares previamente al análisis. La precisión en la determinación de las entidades aumenta conforme los ángulos de intersección de los rayos dejan de ser paralelos y disponemos de más imágenes. La técnica de correspondencia mínimo cuadrática multi-‐imagen con
constreñimientos geométricos presenta considerables ventajas frente a la correspondencia de un solo par de imágenes. Se destaca: -‐La fiabilidad de la correspondencia es mayor. -‐Las imágenes que presentan deformaciones pueden detectarse y eliminarse a tiempo. -‐ Los errores producidos por asignaciones erróneas son menos. La estrategia de asignación correcta de entidades conjugadas puede hacer uso
de las redundancias. De hecho, la asignación de entidades conjugadas se puede establecer sobre la base de que los píxeles implicados aparezcan en más de dos imágenes. De esta manera se asegura que las correspondencias de imagen detectadas sean más fiables y que los datos que se obtienen sean más ciertos. Por el contrario, utilizar esta estrategia reduce el número de asignaciones establecidas. No obstante, conforme aumenta el número de imágenes, la cantidad de datos que se extraen y cotejan es mayor. La condición hace posible la resolución de ambigüedades en las tareas de
correspondencia es que las mismas entidades conjugadas aparezcan en diversas imágenes. Dicha condición se cumple matemáticamente cuando sobre una tercera imagen aparece reflejada la intersección de dos líneas epipolares provenientes de distintos centros de proyección.
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
11
3. Tipos de instrumentos
3.1. Cámaras digitales
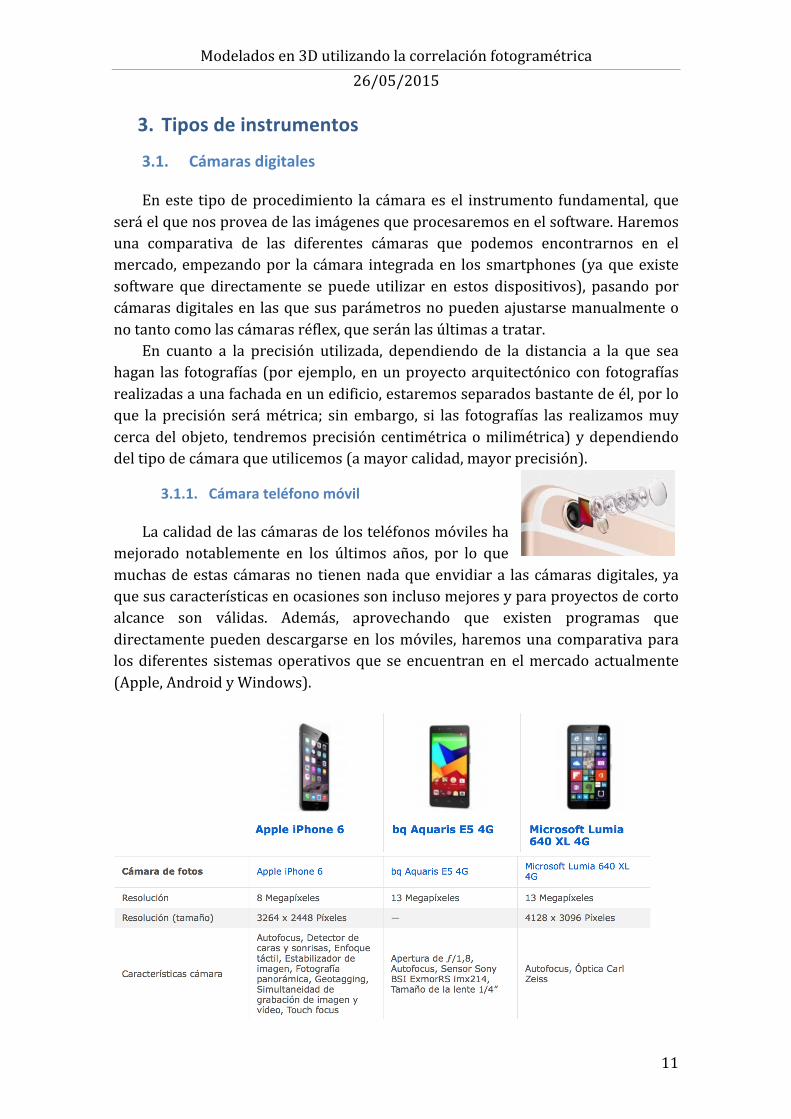
En este tipo de procedimiento la cámara es el instrumento fundamental, que será el que nos provea de las imágenes que procesaremos en el software. Haremos una comparativa de las diferentes cámaras que podemos encontrarnos en el mercado, empezando por la cámara integrada en los smartphones (ya que existe software que directamente se puede utilizar en estos dispositivos), pasando por cámaras digitales en las que sus parámetros no pueden ajustarse manualmente o no tanto como las cámaras réflex, que serán las últimas a tratar.
En cuanto a la precisión utilizada, dependiendo de la distancia a la que sea hagan las fotografías (por ejemplo, en un proyecto arquitectónico con fotografías realizadas a una fachada en un edificio, estaremos separados bastante de él, por lo que la precisión será métrica; sin embargo, si las fotografías las realizamos muy cerca del objeto, tendremos precisión centimétrica o milimétrica) y dependiendo del tipo de cámara que utilicemos (a mayor calidad, mayor precisión).
3.1.1. Cámara teléfono móvil
La calidad de las cámaras de los teléfonos móviles ha mejorado notablemente en los últimos años, por lo que muchas de estas cámaras no tienen nada que envidiar a las cámaras digitales, ya que sus características en ocasiones son incluso mejores y para proyectos de corto alcance son válidas. Además, aprovechando que existen programas que directamente pueden descargarse en los móviles, haremos una comparativa para los diferentes sistemas operativos que se encuentran en el mercado actualmente (Apple, Android y Windows).

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
12
3.1.2. Cámara réflex
Las dos cámaras que compararemos serán dos modelos de Canon: Canon EOS 5D Mark II2 y Canon EOS-‐1D Mark III3.
Sensor CMOS de fotograma completo y 21,1 MP (Píxeles efectivos)
Sensor CMOS sensor con 10,1 megapíxeles (Píxeles efectivos)
Gama ISO ampliable a 25600 Gama ISO 100 - 3200 (L:50 H:6400) AF de 9 puntos + 6 puntos AF de ayuda
al enfoque Sistema AF de área amplia con 19
puntos Procesador DIGIC 4 Procesadores duales "DIGIC III"
Sistema integrado de limpieza EOS Sistema integrado de limpieza EOS Precio: 2.500€ Precio: 3.200€
Actualmente fuera del mercado. Actualmente hay cámaras más recientes con mejores características (mejor procesador, mejor sensor (CMOS de 50,6 MP), con una gama más amplia de 100-‐25.600 ISO y cuyo precio asciende a los 4.000 € (por ejemplo, la Canon EOS 5Ds R).
3.2. Requisitos del sistema
Cuando utilizamos software aplicando el método de correlación de imágenes, hay varios aspectos que hay que tener en cuenta, como es la tarjeta gráfica, la memoria del disco duro o el procesador (o CPU), ya que a mejor procesador (mayor cantidad de núcleos), mayor velocidad de procesamiento, y la duración de procesado de imágenes será más corta.
2 http://www.canon.es/for_home/product_finder/cameras/digital_slr/eos_5d_mark_ii/ 3 http://www.canon.es/for_home/product_finder/cameras/digital_slr/eos_1d_mark_iii/
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
13
3.3. Tipos de software
Existen en el mercado aplicaciones que realizan la orientación totalmente automática. Estos programas utilizan algoritmos muy complejos y normalmente necesitan muchas fotografías con un grado de solape elevado. Estos algoritmos permiten autocorrelacionar puntos, orientar el fotomodelo, calibrar las cámaras e incluso formar el modelo en una única operación. Podemos destacar como aplicación totalmente automática el software 123D Catch que además trabaja en la nube. Es importante saber si las cámaras están o no calibradas, ya que si procesamos y las cámaras no lo están, obtendremos peores resultados.
3.3.1. Autodesk 123D Catch 123D Catch free: Gratis
El funcionamiento del software Autodesk 123D Catch se basa en la combinación de imágenes de un elemento concreto, por lo que antes de comenzar con la toma de las fotografías será necesario tener en cuenta una serie de requisitos:
-‐ Tener buena luz (que no interfiera directamente en el objeto y no genere sombras).
-‐ Colocar el objeto de forma que se pueda fotografiar a su alrededor en forma de círculo, cubriéndolo con fotografías suficientes.
-‐ Usar la cámara sin flash. Otro de los requisitos es tener una cuenta en Autodesk, porque si no, no
podremos procesar nuestro proyecto. En cuanto se añadan las imágenes, se completan los campos para que nos puedan enviar el proyecto y acto seguido se procesa. Una vez finalizado, se puede observar el objeto modelado en 3D, además de las imágenes utilizadas y una serie de cámaras alrededor. Las mismas mostrarán los diversos ángulos provistos por cada una de las fotografías. Se puede exportar en un formato compatible con programas de edición de video o subir a Youtube, pero el formato que más nos interesa es el .OBJ. Cuando el modelo esté exportado se puede observar que el programa exporta tres ficheros:
-‐ OBJ: contiene el modelo -‐ MTL: contiene los materiales -‐ JPG: contiene las texturas
Este software se encuentra disponible para sistemas operativos en móviles (Android, Apple) gratis. 123D Catch Premium: $9,99/mes
Existe una versión de pago, en la que además, se puede exportar en formato .DWG y es la que se debe utilizar para uso comercial.

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
14
3.3.2. Smart 3D Capture Smart 3D Capture Basic: Gratis
Acute 3D desarrolla este software capaz de producir modelos 3D en alta resolución a partir de varios fotogramas, totalmente automático. Analiza dichos fotogramas, tomados desde distintos puntos de vista y automáticamente detecta los pixels correspondientes al mismo punto físico. Una de las ventajas que presenta es que, así como en otros software no sigue el proceso si hay una limitación de memoria cuando el tamaño de los datos de entrada aumenta, divide la producción del modelo 3D en subproducciones para no exceder las capacidades del hardware. Entre sus desventajas se encuentra que al ser totalmente automático, poco podemos modificar o averiguar sus algoritmos matemáticos, y en su versión gratuita, no puede exportarse a ningún formato, simplemente puede ser abierto el trabajo en un visor de la misma casa. Para ello hay que pagar un poco más. Smart 3D Capture Advanced: 2.500€/año o 6.000€

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
15
3.3.3. Agisoft PhotoScan Agisoft PhotoScan Standard Edition: $179 Agisoft PhotoScan Professional Edition: $3.499
Este software también ofrece un proceso bastante automatizado, seleccionar las fotografías que queramos y seguir el proceso, indicando la calidad con la que queremos el resultado, con la diferencia de que en la edición más básica tiene bastantes menos opciones que la profesional, como exportar MDE, ortomosaicos georreferenciados, medir en el modelado 3D, procesado de imágenes multiespectrales, scripts de Python, hasta modelado 4D para escenas dinámicas. En cuanto a aspectos desfavorables de este software nos encontramos con que requiere bastante memoria, ya que genera un volumen elevado de datos, y si no tiene la memoria que requiere, no se realiza el proceso.
3.3.4. PhotoModeler Scanner PhotoModeler Scanner: $2495
Este software proporciona las herramientas para crear modelos 3D precisos, de alta calidad y mediciones en las fotografías. Básicamente, es un escáner 3D que proporciona resultados similares a los de un laser escáner. El proceso de digitalización 3D produce una nube de puntos densa de fotografías de superficies texturizadas de cualquier tamaño. Probablemente sea de los programas que más opciones deja al usuario, con la desventaja de que si detecta errores al realizar el proceso hay que ajustar los parámetros hasta que entre en tolerancia.

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
16
4. Aplicaciones actuales Entre las múltiples aplicaciones que se le dan a la correlación de imágenes se encuentran:
• Arqueología Los usos de la fotogrametría en arqueología son variados: desde modelos de
artefactos hasta modelar grandes excavaciones con fotografía aérea. Los arqueólogos y antropólogos usan este método para crear y medir modelos 3D de objetos, documentar excavaciones, terrenos o estructuras in-‐situ, documentar estructuar antiguas para su conservación y preservación, extraer la superficie 3D de pinturas rupestres.
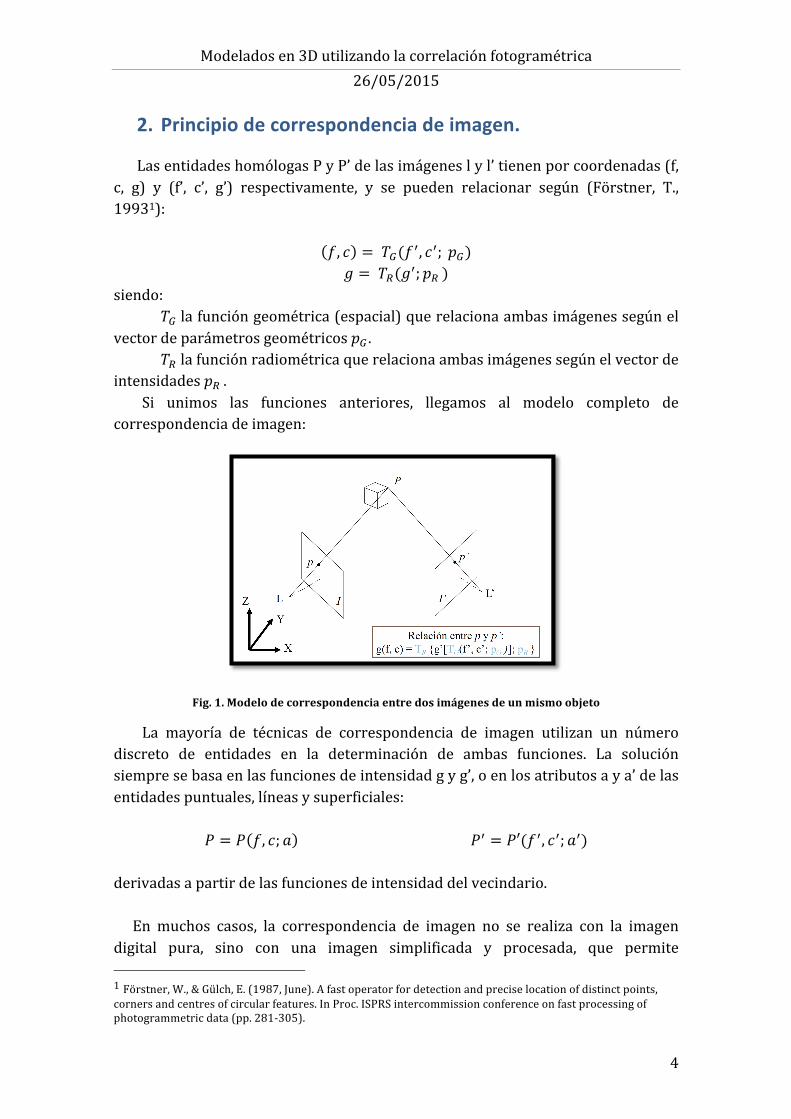
• Arquitectura Al igual que en el caso anterior, en la arquitectura prima la preservación y
conservación del patrimonio cultural; generar modelos 3D para su visualización y estudio.
Fig. 3. Ejemplo de puntos homólogos en múltiples imágenes en un edificio
Fig. 2. Ejemplo de modelado 3D de una pintura rupestre
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
17
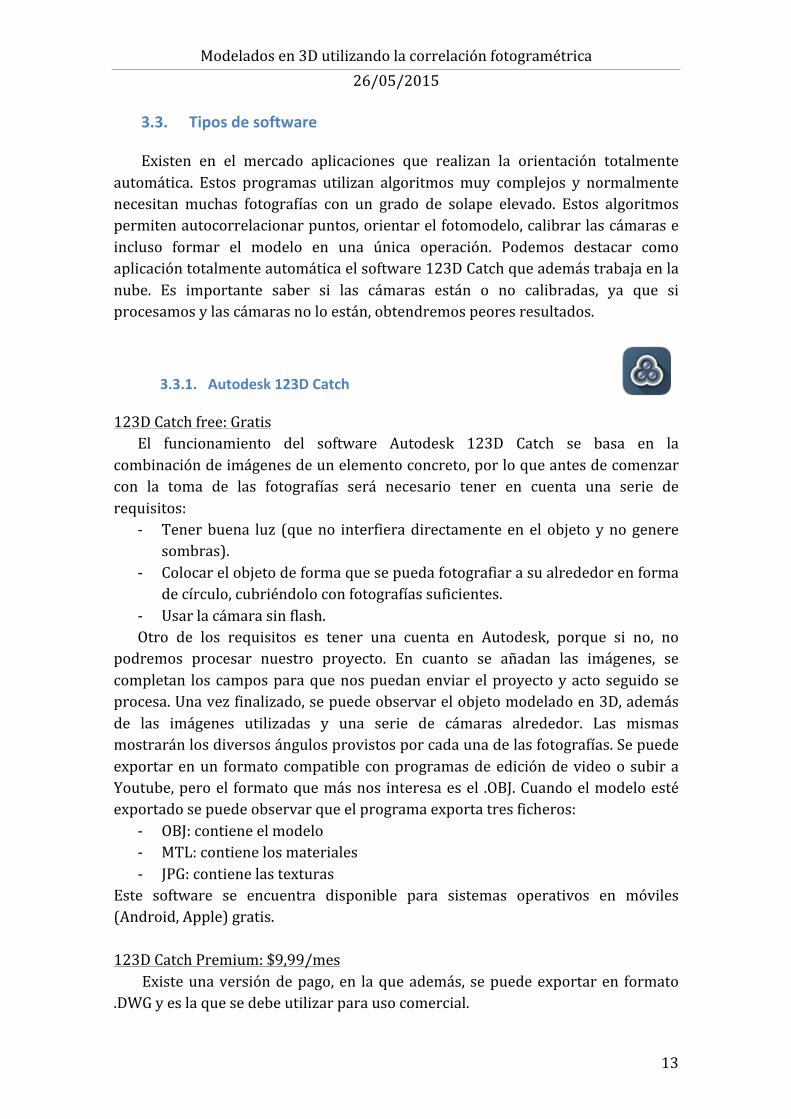
Fig. 4. Ejemplo de puerta románica
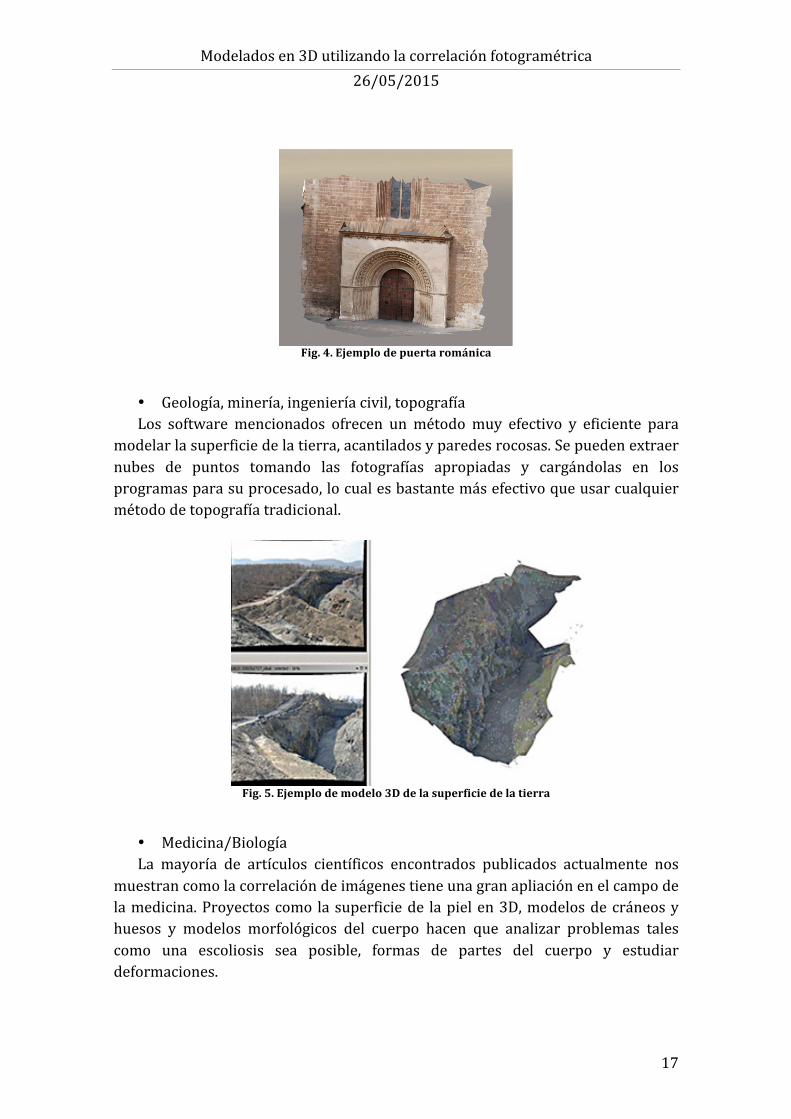
• Geología, minería, ingeniería civil, topografía Los software mencionados ofrecen un método muy efectivo y eficiente para
modelar la superficie de la tierra, acantilados y paredes rocosas. Se pueden extraer nubes de puntos tomando las fotografías apropiadas y cargándolas en los programas para su procesado, lo cual es bastante más efectivo que usar cualquier método de topografía tradicional.
Fig. 5. Ejemplo de modelo 3D de la superficie de la tierra
• Medicina/Biología La mayoría de artículos científicos encontrados publicados actualmente nos
muestran como la correlación de imágenes tiene una gran apliación en el campo de la medicina. Proyectos como la superficie de la piel en 3D, modelos de cráneos y huesos y modelos morfológicos del cuerpo hacen que analizar problemas tales como una escoliosis sea posible, formas de partes del cuerpo y estudiar deformaciones.

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
18
Fig. 6. Proceso de seguimiento en escoliosis
• Cine y animación Creación de modelos 3D para aplicaciones de animación y multimedia, tanto en
pre como en post producción. • Escenas de accidentes y aplicaciones forenses
Tales como determinar la trayectoria de una bala en 3D, huellas, averiguar la altura de un sospechoso con los fotogramas de una cámara de vigilancia, choque de vehículos, etc.
Fig. 7. Reconstrucción de una huella en una escena del crimen

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
19
5. Conclusiones
Los modelos digitales pueden realizarse fotogramétricamente mediante restitución 3D, a partir de correspondencia de imagen o bien utilizando ambos métodos. El primer proceso es manual en su totalidad, mientras que el segundo viene realizándose con éxito de manera semiautomática o automática. La fotogrametría admite capturas de objetos o escenas dinámicas sincronizando cámaras: las cámaras son instrumentos flexibles y de fácil transporte, pero requieren labores de orientación (y de correspondencia) previamente a la captura de datos.
La correlación de imágenes es una de las tareas más importantes cuando se
integra y se analiza información proveniente de varias fuentes. Es un paso fundamental en fusión de imágenes, detección de cambios y en la realización de sistemas de información de imagen. A pesar de que se ha realizado un gran trabajo, la correlación automática de imágenes sigue siendo un campo a desarrollar. Por ejemplo en la correlación de imágenes con distorsiones locales y no lineales, correlación multimodo y en la correlación de imágenes con niveles digitales. Por tanto, si nuestro proyecto se basa en realizar un modelado 3D de un objeto al que podemos aplicar un buen recubrimiento (tanto a su alrededor como conseguir buen solape entre tomas), disponemos de una cámara y las condiciones son las adecuadas, podremos seguir el proceso del método de correlación fotogramétrica. En el caso de que nuestro objeto tuviese muchos brillos y el resultado obtenido estuviera distorsionado, podríamos probar a aplicarle una textura, para mejorar el resultado.
Al contrario que muchos laser scanner 3D, una cámara provee información a color en alta resolución, que software como los anteriormente mencionados, adaptan a la geometría reconstruida, para directamente producir un modelo 3D texturizado. Además, permite reconstruir objetos de varias escalas, desde centímetros hasta kilómetros, con fotografías tomadas en el terreno o desde el aire; su resolución dependerá de la ofrecida por las cámaras.
Por lo que una de las ventajas en este método es el bajo coste, la facilidad de
transporte (una cámara), escaneado desde plataformas inestables, escaneado de objetos muy pequeños, escaneado desde largas distancias y producción de un modelo texturizado de gran calidad.
En cuanto al aspecto de realizar modelados 3D con imágenes tomadas desde
avionetas o drones, utilizando el método de correlación fotogramétrica podemos obtener resultados muy buenos, porque actualmente existen software que resuelven el proyecto con mucha solvencia.

Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
20
Uno de las desventajas de este método es como diferenciar entre deformación de la imagen y cambios reales en la escena.
En el futuro, la idea de un método de correlación capaz de reconocer el tipo de tarea encomendada y que decida por él mismo el tipo de método a utilizar (según considere más apropiado, si por área, por elemento…) puede motivar el desarrollo de sistemas expertos. Se basará en la combinación de varias aproximaciones, esperando un consenso entre diferentes proyectos con diferentes resultados.
Modelados en 3D utilizando la correlación fotogramétrica 26/05/2015
21
8. Bibliografía [1] Lerma, J. L. (2002). Fotogrametría moderna: analítica y digital. Universidad
Politécnica de Valencia. [2] Zitova, B., & Flusser, J. (2003). Image registration methods: a survey. Image and
vision computing. [3] Förstner, W., & Gülch, E. (1987, June). A fast operator for detection and precise
location of distinct points, corners and centres of circular features. In Proc. ISPRS intercommission conference on fast processing of photogrammetric data.
[4] Página web 123D Catch: http://www.123dapp.com Consultada el 23 de mayo de 2015 a las 10:24 [5] Página web PhotoModeler: http://www.photomodeler.com Consultada el 23 de mayo de 2015 a las 10:45 [6] Página web 3D Smart Capture: http://www.acute3d.com Consultada el 24 de mayo de 2015 a las 17:04 [7] Página web Agisoft: http://www.agisoft.com Consultada el 24 de mayo de 2015 a las 19:15 [8] Wang, Z., Kieu, H., Nguyen, H., & Le, M. (2015). Digital image correlation in experimental mechanics and image registration in computer vision: Similarities, differences and complements. Optics and Lasers in Engineering. [9] Wang, Y. (1998). Principles and applications of structural image matching. ISPRS Journal of Photogrammetry and Remote Sensing [10] Keller, Y., & Averbuch, A. (2007). A projection-‐based extension to phase correlation image alignment. Signal processing. [11] Wolter, A., Stead, D., & Clague, J. J. (2014). A morphologic characterisation of the 1963 Vajont Slide, Italy, using long-‐range terrestrial photogrammetry. Geomorphology. [12] Sanz, J. O., Docampo, M. D. L. L. G., Rodríguez, S. M., Sanmartín, M. T. R., & Cameselle, G. M. (2010). A simple methodology for recording petroglyphs using low-‐cost digital image correlation photogrammetry and consumer-‐grade digital cameras. Journal of Archaeological Science, 37(12), 3158-‐3169.