







Idiomas
Páginas
Jurídico


Aplicaciones de edo’s de 2do orden a oscilaciones
Dr. Mario Medina Valdez


m=masa del objeto a= resistencia del medio
k=constante del resorte F(t)=fuerzas externas
a=0 movimiento no amortiguadoa no nulo, movimiento amortiguado
F(t)=0, movimiento libreF(t) no nulo, movimiento forzado

Movimiento libre, no amortiguado
0,( ) 0
aF t=
≡
Péndulo simple
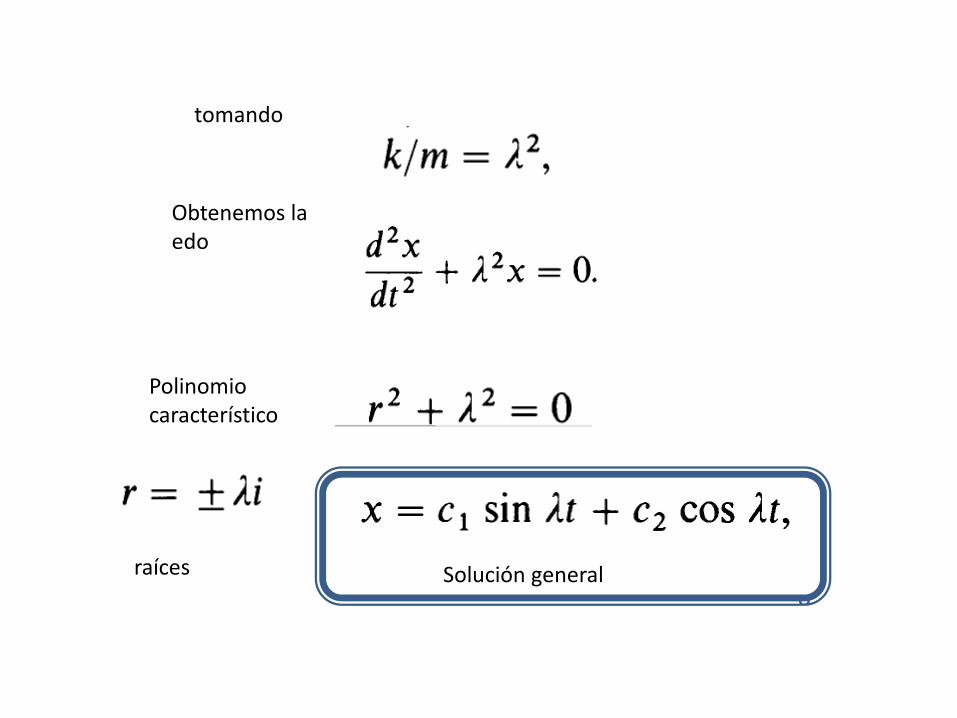
tomando
Obtenemos la edo
Polinomio característico
raíces Solución general

Usando las condiciones iniciales
Y la derivada de la solución
Obtenemos los valores de las constantes

De esta forma
Reescribiremos la solución para obtener mayor información de la misma
donde

[ ]sin( )sin( ) cos( ) cos( )c t tφ λ φ λ= − +
Si tomamos

Movimiento armónico simple
c
-c

Máximo desplazamiento cuando
Phi=ángulo de fase
Lambda/2Pi=1/T=Número de oscilaciones por segundo= frecuencia natural
Período=T=

solución
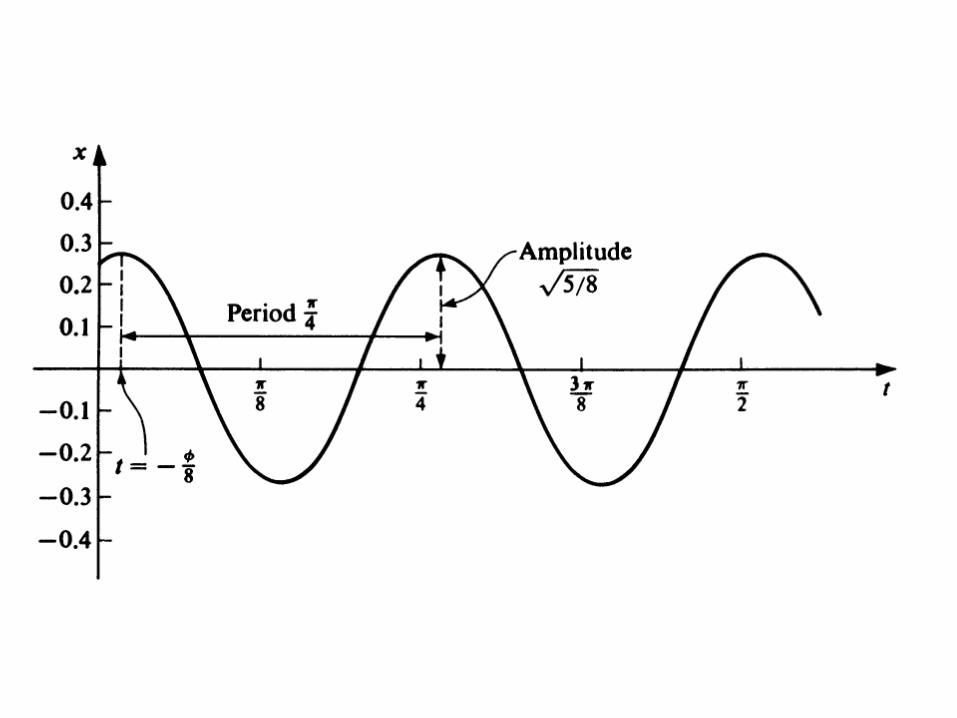
Para obtener la información de la solución: Período, ángulo fase y amplitud

Amplitud=
Período=T=
Frecuencia=
Solución

Movimiento libre, amortiguado
Las raíces dependen del sigo del discriminante
1er caso: Movimiento libre amortiguado:
Raíces:
Solución general:

1er caso: Movimiento libre amortiguado
Raíces complejas:
Solución general:

Una mejor forma de escribir la solución:
Factor de amortiguamiento
Movimiento periódico oscilatorio

Decremento logarítmico
Razón entre las amplitudes a los tiempos T y

Expresión de la solución en constantes originales
Movimiento oscilatorio amortiguado ocurre si
oscilacionesFrecuencia
de las oscilaciones

Si no hay resistencia del medio, a=0
Frecuencia natural del sistema sin fricción
La frecuencia natural de las oscilaciones en un sistema oscilatorio con fricción es menor
que la frecuencia natural del correspondiente sistema sin fricción

2do caso: amortiguamiento crítico
solución
Desaparecen las oscilaciones

Posibles movimientos:
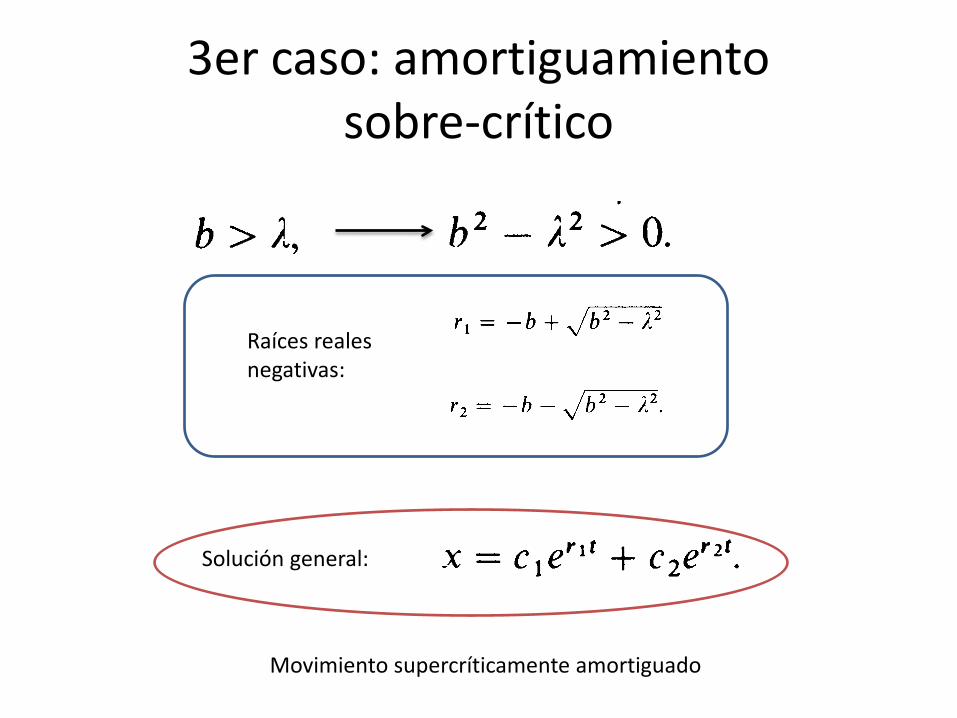
3er caso: amortiguamiento sobre-crítico
Raíces reales negativas:
Solución general:
Movimiento supercríticamente amortiguado

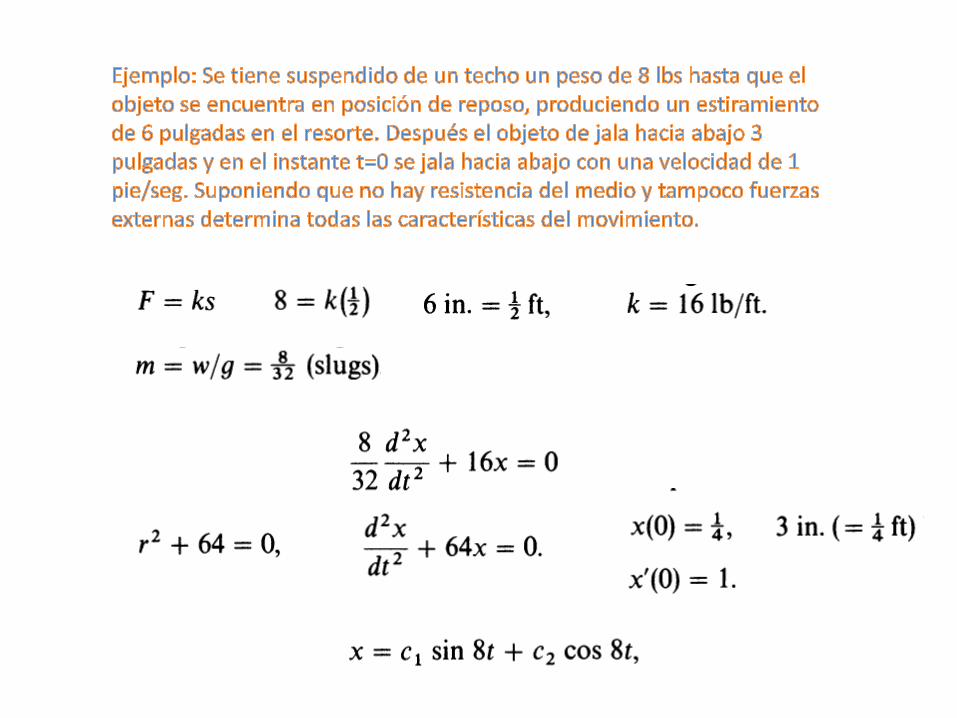
Ejemplos
Peso=

solución Otra forma de escribirla
Factor de amortiguamiento “Período”
323π
Decremento logarítmico


Movimiento forzado: amortiguamiento,
fuerza externa no nula (periódica)

Supongamos un término de amortiguamiento pequeño, es decir, el amortiguamiento es menor que crítico :
Solución particular

donde
Por lo tanto:
Buscamos una mejor presentación de la solución para obtener información de la misma
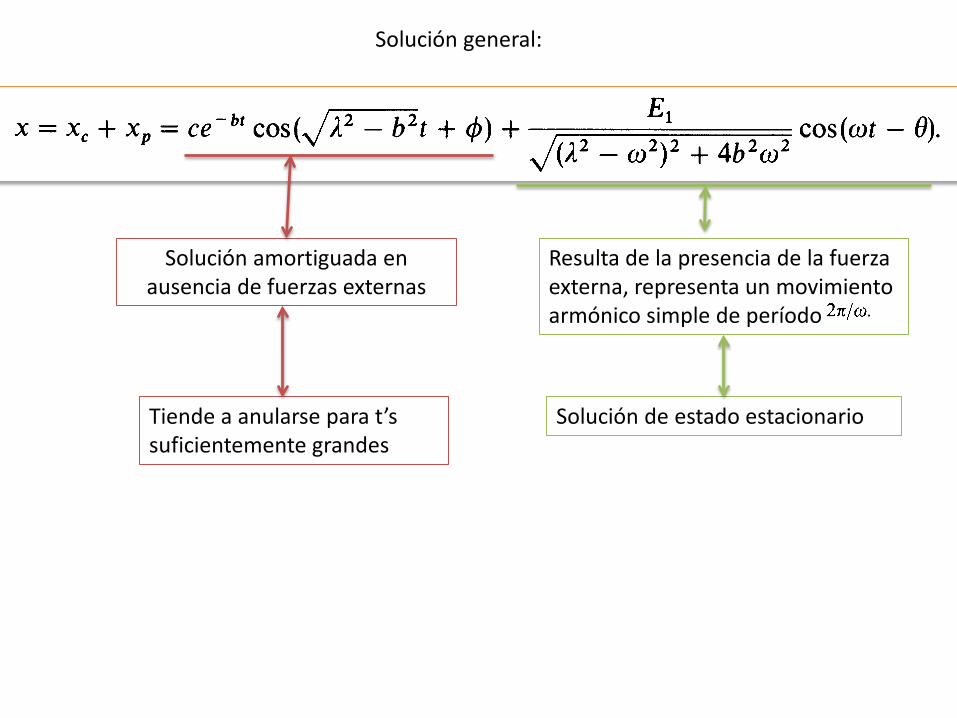
Solución general:
Solución amortiguada en ausencia de fuerzas externas
Resulta de la presencia de la fuerza externa, representa un movimiento armónico simple de período
Solución de estado estacionarioTiende a anularse para t’ssuficientemente grandes

Sol’n general de la homogénea
Solución part. De la forma
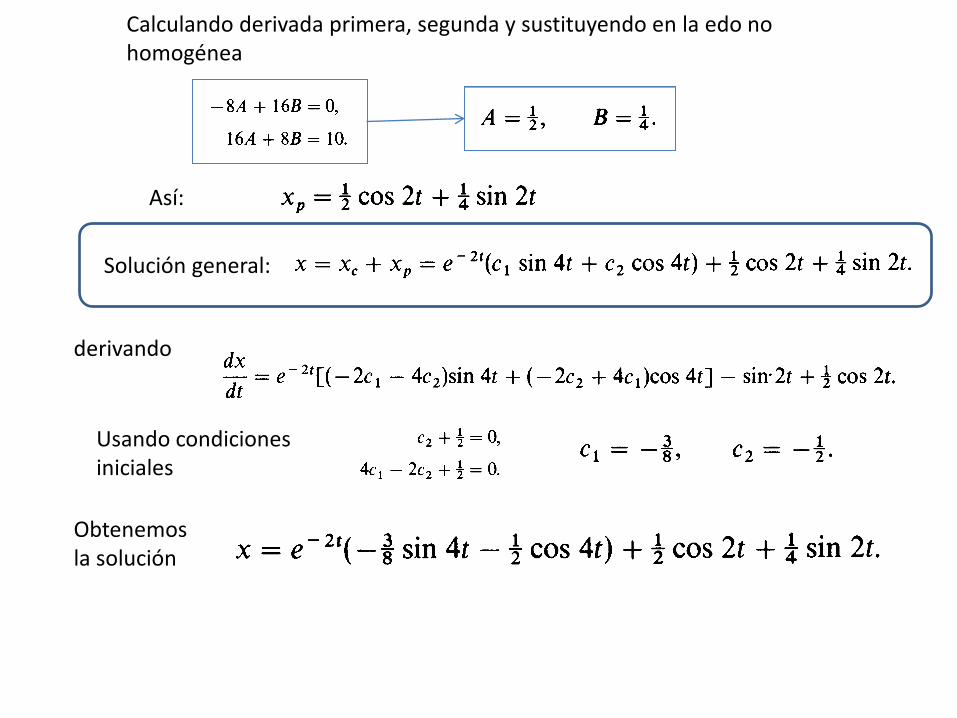
Así:
Solución general:
derivando
Usando condiciones iniciales
Obtenemos la solución
Calculando derivada primera, segunda y sustituyendo en la edo no homogénea

usando
con
Por otra parte
donde
En consecuenciaSol’n edoestacionario

Solución estado estacionario
Solución del problema

TRANSFORMADA DE LAPLACESegundo teorema de traslación
Ejemplo: calcular

0
0
( ) ( )
( ) ( ) ( ) ( )
st
ast st
a
e g t U t a dt
g t e U t a dt g t e U t a dt
∞−
∞− −
− =
− + − =
∫
∫ ∫

Ejemplo: resolver EDO’s usando transformada de Laplace
Observemos que
Aplicando TLa la edo original
Un poco de álgebra
Despejando Y(s)
Necesitamos calcular tres transformadas inversas deLaplace
2
2 2
( 1)( 1)
1 1 1
ss s
A B Css s s
=+ +
+ ++ + +
1
1( ) , ( ) 1
( ( ) ) ( ) ( )
t
s
F s f t es
L F s e f t U tπ π π
−
− −
= =+
= − −

Identidades trigonométricas
2
1 12
1
1 ( ) ,1
1( ) ( ( )) ( ) sin( )1
( ( ) ) ( ) ( )
s s
s
e F s es
f t L F s L ts
L F s e f t U t
π π
π π π
− −
− −
− −
=+
= = =+
= − −
2
1 12
1
( ) ,1
( ) ( ( )) ( ) cos( )1
( ( ) ) ( ) ( )
s s
s
s e F s es
sf t L F s L ts
L F s e f t U t
π π
π π π
− −
− −
− −
=+
= = =+
= − −
Finalmente
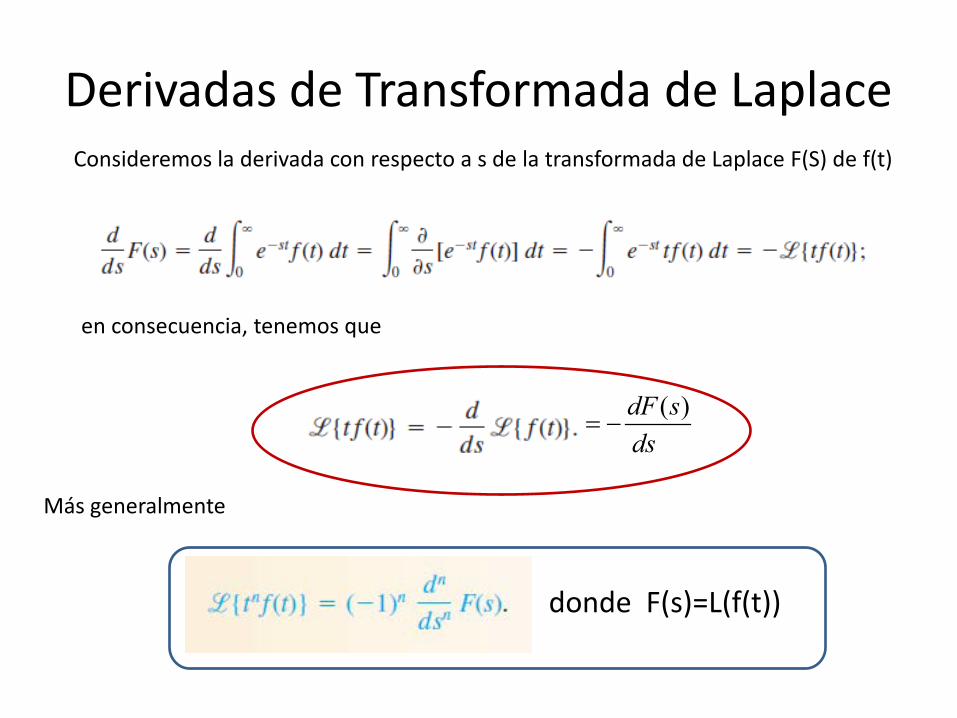
Derivadas de Transformada de LaplaceConsideremos la derivada con respecto a s de la transformada de Laplace F(S) de f(t)
en consecuencia, tenemos que
( )
dF sds
= −
donde F(s)=L(f(t))
Más generalmente

Ejemplo:
Otro ejemplo: cálculo de transformada de Laplaceusando dos maneras diferentes
3 32
1( ) ( ( ) ) ( 3)( 3)
t tL te L f t e F ss
= = − =−
2
1( ) ( ( )) ( )F s L f t L ts
= = =
33
2
( ) 1 1( ) 3 ( 3)
tt dL e dL te
ds d s s = − = − = − −

Ejemplo edo 2do orden coef ctes no homogénea
( )
( )
22
22
22
22 2
( '') 16 ( ) (cos(4 ))
( ) (0) '(0) 16 ( )16
( ) 1 16 ( )16
16 ( ) 116
1( )16 16
L x L x L tss X s sx x X s
sss X s X s
sss X s
ssX s
s s
+ =
− − + =+
− + =+
+ = ++
= ++ +
Aplicando transf. de Laplace y propiedades

( )( ) ( )
1 1 1 12 22 22 2
1 1( ) ( )16 1616 16
s sx t L X s L L Ls ss s
− − − −
= = + = + + + + +
De esta forma:
Sabemos que k=4
Finalmente obtenemos la solución buscada, usando viejos “trucos” algebraicos de multiplicar y dividir por el mismo número

ConvoluciónConvolución de la función f con la función g es la función definida por
Ejemplo
Ejercicio: completar los cálculos de la integral
Propiedad: La convolución es conmutativa
es decir

U(t-a)-U(t-b)

Convolución de dos gaussianas



Propiedades convolución

Teorema de convolución
Para f(t) y g(t) continuas a trozos y de orden exponencial
( )1 ( ) ( )f g L F s G s−∗ = cuando
( )
( )
1
1
( ) ( )
( ) ( )
f t L F s
g t L G s
−
−
=
=
Versión “retro”:
El Teorema de convolución permite calcular transf de Laplace inversas de
productos de funciones que dependen de la variable “s”

( ) , ( ) sin( )tf t e g t t= =
Ejemplo: Calcular la transformada de una convolución de dos funciones
Otro ejemplo: calcular la transformada de inversa de Laplace de un producto de dos funciones
( ) ( ) 0 0 01 1 122
0 0 0
a) ( ) ( ) 1 sin( ) sin( )1 1 1 ( ) ( )
11 b) ( ) ( ) sin( ) 1 sin( ) 1 cos( )
t t t
t t t
f g f g t d t d t dL L L F s G s f g
s ss sg f g f t d d d t
τ τ τ τ τ τ τ
τ τ τ τ τ τ τ
− − −
∗ = − = ⋅ − = − = = ⋅ = = ∗ = ++ ∗ = − = ⋅ = = −
∫ ∫ ∫
∫ ∫ ∫
( )
1
12 2
1 1( ) , 1 ( )
1 1( ) , sin ( )1 1
F s L f ts s
G s L t g ts s
−
−
= = =
= = = + +

( )1 1 12 2
0
0
1 1 1 ( ) ( ) ( ) ( )( 1)( 1) 1 1
sin( ) sin( ) ... sin( )
sin( ) sin( ) ...
tt
tt
t t
L L L F s G s f t g ts s s s
e t e t d blablablae t
t e e d blablabla
τ
τ
τ τ
τ τ
− − −
−
= ⋅ = ⋅ = ∗ − + − +
∗ = − == ∗ = ∗ = =
∫
∫
Otro ejemplo del uso del Teorema de Convolución para el cálculo de transformadas inversas de Laplace:

Funciones periódicas
f(t):[0,infinito)R, periódica de período T, continua por trozos y de orden exponencial

DemostraciónLa transf de Laplace se divide en dos integrales
Con el cambio de variables
Por consiguiente
Con un poco de algebrita podemos despejar la transformada deseada

SOLUCIÓN NUMÉRICA DE
ECUACIONES DIFERENCIALES ORDINARIAS DE PRIMER ORDEN

SOLUCION NUMERICA
Una solución de esta ecuación inicial con CI es una función
0 0: ( , )x xϕ ε ε− + →
tal que
0 0'( ) ( , ( )), para ( , )x f x x x x xϕ ϕ ε ε= ∈ − +
PROBLEMA: Hallar una aproximación numérica de la solución de la EDO con CI

Curva solución
pendiente
Campo de pendientes f(x,y)
0 1 2 ,na x x x x b= < < < < =
Conocemos 0( ) ( )a xϕ ϕ=
Queremos obtener una aproximación de ( ) para b b aϕ >
Consideramos una partición del intervalo
donde lo llamamos tamaño de paso. Observemos que
[ , ]a b
1i it thn
+ −=
0 , 1, 2,...kt kh t k n= + =

Curva solución
pendiente=
Consideramos la condición inicial
0 0 0 0( , ) ( , ( )) ( , ( ))x y x y x a y a= =
0 0 0 2( ) ( ) '( )( ) ( )y x y x y x x x R x= + − +
El desarrollo de Taylor 1er orden alrededor de 0x
0 0 0( ) ( ) '( )( )y x y x y x x x+ −
obtenemos la aproximación lineal de ( )y xcerca de 0x
tomando 1 0x x x h= = +
obtenemos1 0 0 0 0 0 0( ) ( ) ( ) ( ) '( ) ( ) ( , )y x y x y x h y x y x h y x f x y h= = + + = +
1 1 0 0 0
0 0 0
( ) ( ) ( , ) = ( , )y y x y x f x y h
y f x y h= +
+
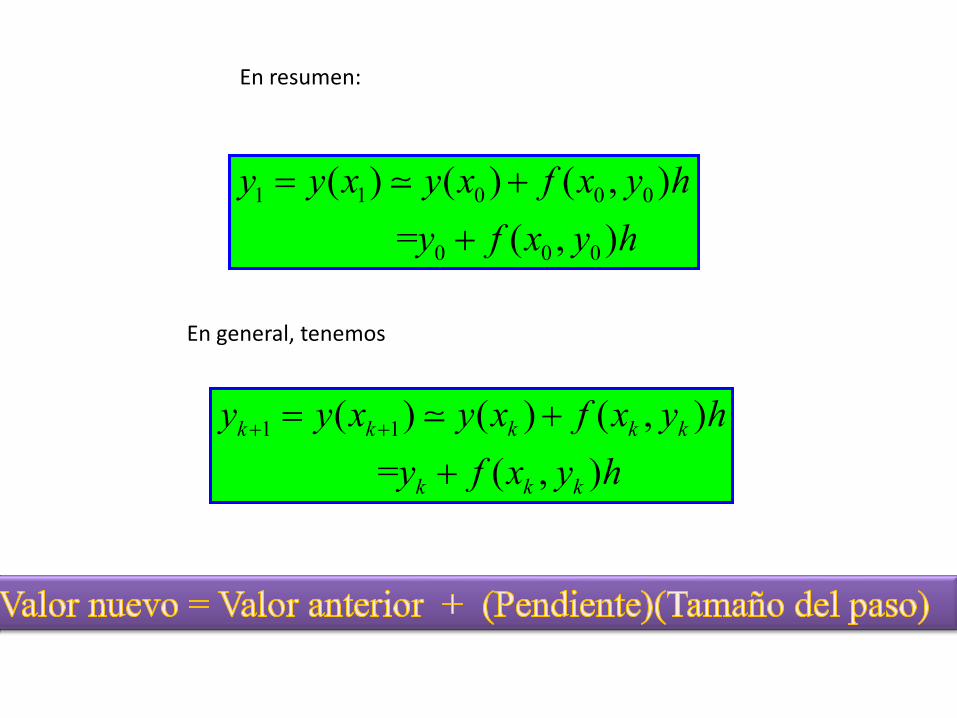
En resumen:
En general, tenemos
1 1( ) ( ) ( , ) = ( , )
k k k k k
k k k
y y x y x f x y hy f x y h
+ += ++

Ejemplo Método de Euler
1 0 0 0( , ) 1 (3.5)(0.1) 1.35y y f t y h= + = + =
2 2 1 1 1( ) ( , ) 1.35 (0.1,1.35)(0.1) 1.35 (3.229837)(0.1) 1.672984y t y y f t y h f≅ = + = +
= + ≅
SI QUEREMOS APROXIMAR y(1) CONTINUAMOS CON ESTE PROCESO

EjemploConsideremos la ecuación diferencial ordinaria
Recordemos que no es difícil encontrar la solución analítica, mediante el método de separación de variables, de la ecuación diferencial. Ejercicio: Hallar la solución analítica de la ecuación diferencial anterior
Veamos nuestro primer ejemplo para resolover ecuaciones diferenciales ordinarias de primer orden mediante Matlab:
function r = yexact(t,y0,K,s) r = y0*exp(K*t) + s*(1 - exp(K*t));

Se ha definido una función que depende de cuatro argumentos: el temporal, la condición inicial y dos constantes. Supongamos que sus valores están dados por y0=100, K=1, and s=20. Escribamos el siguiente código en nuestra pantalla del editor de Matlab:
El siguiente comando crea un vector
t = 0:0.01:5;
plot(t,yexact(t,100,1,20))
El siguiente comando crea la gráfica de la solución
Figura 1: Solución exacta

Paso 1. definir f (t, y)Paso 2. Entrada: Valores iniciales t0 and y0Paso 3. entrada tamaño de paso h # de pasos nPaso 4. salida t0 and y0Paso 5. para j de 1 a n doPaso 6. k1 = f (t, y)y = y + h ∗ k1
T = t + hPaso 7. salidas t y yPaso 8. end
Estructura computacional del Método de Euler

Programa en Matlabclc;clf;clear all;T=25;tinic=0.0;tfinal=5.0;yinic=50.0;n=100;f=@(t,y) -2*(y-T);h=(tfinal-tinic)/n;t=zeros(1,n+1);y=zeros(1,n+1);t(1)=tinic;y(1)=yinic;for i=1:n
t(i+1)=t(i)+h;y(i+1)=y(i)+h*f(t(i),y(i));
end
plot(t,y,'b')title('Soluciones de dy/dt=-2*(y-T), y(0)=T mediante Euler')axis([0 5 20 55])xlabel('Tiempo');ylabel('Temperatura')hold onplot(t,25,'-r')

Gráfica obtenida con Matlab

Diferentes números de paso n=5,10

function [t,y]=Euler_clasico(f,tinic,yinic,tfinal,n)h=(tfinal-tinic)/n;t=zeros(1,n+1);y=zeros(1,n+1);t(1)=tinic;y(1)=yinic;for i=1:n
t(i+1)=t(i)+h;y(i+1)=y(i)+h*f(t(i),y(i));
end
clc;clf;clear all;T=25;tinic=0.0;tfinal=5.0;yinic=50.0;n=100;f=@(t,y) -2*(y-T);[t1,y1]=Euler_clasico(f,tinic,yinic,tfinal,n);plot(t1,y1,'b')title('Soluciones de dy/dt=-2*(y-T), y(0)=T mediante Euler')axis([0 5 20 55])xlabel('Tiempo');ylabel('Temperatura')hold onplot(t1,25,'-r')
Programas Método de Euler en Matlab
TIPO FUNCIÓN
TIPO SCRIPT

%%%PROGRAMA DEL METODO DE EULER MODIFICADO CON UN ARCHIVO TIPO SCRIPT%%%%%%ECUACION DIFERENCIAL ORDINARIA dy/dt=k(y-c)%%%%
k = 1;c = 20;y0= 100;npuntos = 50; %%Numero de pasos%%h = 0.1;
y = zeros(npuntos,1); %Inicializamos el vector 'y' de posiciones con ceros%t = zeros(npuntos,1); %Inicializamos el vector 't' de tiempos con ceros%
y(1) = y0; %Posicion inicial%t(1) = 0.0; %Timepo inicial%
for j = 1 : npuntos %-1 % loop para el tamaño de paso%y(j+1) = y(j) + (h/2) * ((k*(y(j)-c)+ y(j) +h*k*(y(j)-c)));t(j+1) = t (j) + h;
end

%%Hemos terminado la simulacion numerica%%%%Para el ERROR%%
z = exp(t + log(80))+ 20; %Solucion analitica de la ecuacion
%%Empezemos la parte de la visualizacion%%
plot (t,y,'-bo',t,z,'r')grid onxlabel('tiempo')ylabel('y(t)')legend('solucion numerica','solucion analitica')title('Solucion numerica mediante Euler mejorado Vs …
solucion analitica')

Euler mejorado (Heun, predictor-corrector)
0x 1 0x x h= +
1y
1 1( , )f x y
0 0( , )f x y
{ }0 0 1 11 ( , ) ( , )2
f x y f x y+
1y
1
1 11
: ( , )( , ) ( , ):
2
i i i i
i i i ii i
y y f x y hf x y f x yy y h
+
+ ++
= ++
= +
Predictor
Corrector
1 0 0 0: ( , )y y f x y h= +Predictor 0 0 1 11 0
( , ) ( , ):2
f x y f x yy y h+= +
Corrector
0x 1 0x x h= +

Ejemplo Euler-mejorado
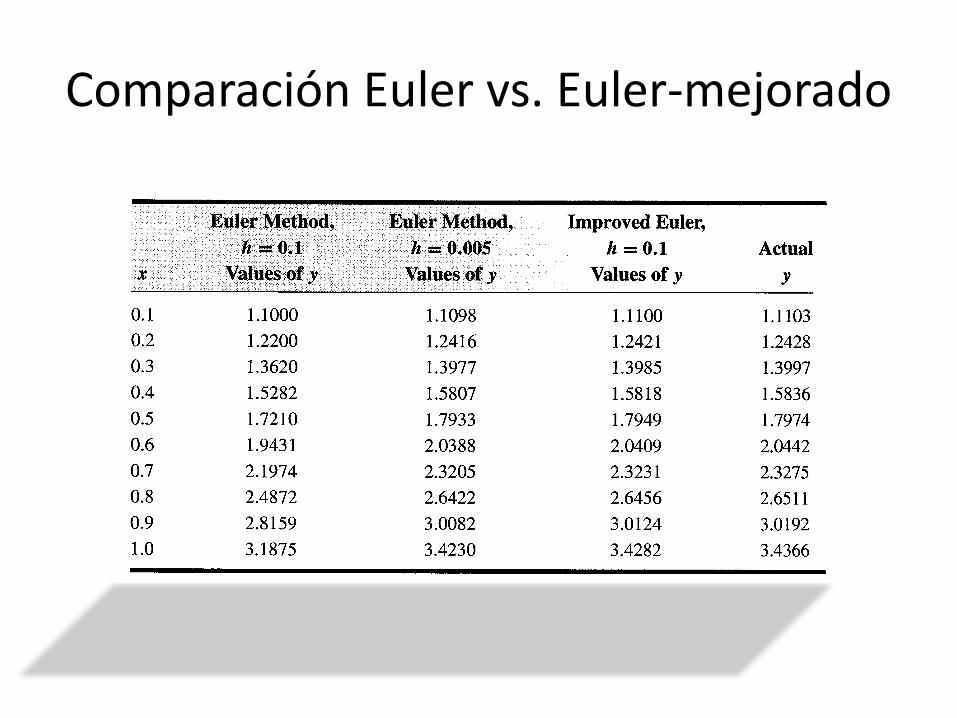
Comparación Euler vs. Euler-mejorado

Estructura computacional del Método de Euler Mejorado
Paso 1. definir f (t, y)Paso 2. Entrada: Valores iniciales t0 and y0Paso 3. entrada tamaño de paso h # de pasos nPaso 4. salida t0 and y0Paso 5. para j de 1 a n doPaso 6. k1 = f (t, y)
k2 = f (t + h, y + h ∗ k1)y = y + (h/2) ∗ (k1 + k2)t = t + h
Paso 7. salidas t y yPaso 8. end

Programa Euler-mejorado en Matlab
function[t,y]=Euler_mejorado(f,tinic,yinic,tfinal,n)h=(tfinal-tinic)/n;t=zeros(1,n+1);y=zeros(1,n+1);t(1)=tinic;y(1)=yinic;for i=1:n
t(i+1)=t(i)+h;P1=f(t(i),y(i));P2=f(t(i)+h,y(i)+h*P1);y(i+1)=y(i)+(h/2)*(P1+P2);
end
tinic=0.0;tfinal=1.0;yinic=50.0;n=1000;f=@(t,y) -2*(y-25);[t3,y3]=Euler_mejorado(f,tinic,yinic,tfinal,n);plot(t3,y3,'b')title('Soluciones de dy/dt=-2*(y-25), y(0)=T mediante Euler-mejorado')axis([0 1 20 55])xlabel('Tiempo');ylabel('Temperatura')axis([0 1 20 55])


75
• Se usa el método de Euler pararealizar una predicción del valor de la solución usando la pendiente en un punto intermedio del intervalo
1/2 ( , )2i i i ihy y f x y+ = +
Método de Punto Medio (o Polígono mejorado)
hyxfyy iiii ),( 2/12/11 +++ +=

Geometría Punto Medio
0x
1 002
12
x x h+= +
1 0x x h= +
0 0( , )x y
0 0( , )f x y
1 10 02 2
( , )f x y+ +
102
y+
1 0 0 002
( , )2hy y f x y
+= +
Predicción
1y
1 0 1 10 02 2
( , )y y f x y h+ +
= +

Punto Medio
12
( , )2i i ii
hy y f x y+= +Predicción
1 1 12 2
( , )i i i iy y f x y h+
+ += +

Queremos aproximar numericamente soluciones de EDO’s de primer orden
Filosofía:
),( yxfdxdy
=
1
1
Valor nuevo valor viejo pendiente * (tamaño_paso)*
valor nuevo, valor viejo pendiente, tamaño de paso
i i
i i
y y hy y
h
ϕ
ϕ
+
+
= += +
¿Qué hemos hecho hasta el momento?

Runge Kuta
1
1
Valor nuevo valor viejo pendiente * (tamaño_paso)*
valor nuevo, valor viejo pendiente, tamaño de paso
i i
i i
y y hy y
h
ϕ
ϕ
+
+
= += +
Buscamos un método de la forma
De manera que la pendiente sea una pendiente ponderada sobre distintos puntos del intervalo [x(i),x(i+1)].

Runge Kuta de Cuarto Orden(Acto de fe)
1
1
Valor nuevo valor viejo pendiente * (tamaño_paso) *
valor nuevo, valor viejo pendiente, tamaño de paso
k k
k k
y y hy y
h
ϕ
ϕ
+
+
= += +

1nk
2nk
3nk4nk
nt 1n nt t h+ = +12nt h+
ny1ny +
( )1 1 2 3 41 * , 2 26k k n n n ny y h k k k kϕ ϕ+ = + = + + +

Ejemplo Runge Kuta Cuarto Orden
( , ) 1 4f t y t y= − +
1 0
1
( ) ( ) (0 0.2) (0.2) 2.5016y t y t h y
y y= + = +
= ≅ ≅
Tamaño de paso:

Otro ejemplo
Repitiendo el proceso
Tamaño de paso
Calculamos las cuatro
pendientes
(1) ?y =
Es necesario realizar dos “juegos“ de cálculos

Obtención de Runge Kuta de Segundo Orden1
1 1 2 2
i i
M M
y y ha k a k a k
ϕϕ
+ = += + + +
constantesia
1
2 1 11 1
3 2 21 1 22 2
1 1,1 1 1, 11 11
( , )( , )( , )
( , ... )
i i
i i
i i
M i M i M M M N
k f t yk f t p h y q k hk f t p h y q k h q k h
k f t p h y q k h q k h− − − − −
== + += + + +
= + + + +
es una pendiente ponderada de salidaϕ

23( ) ( ) '( ) ''( ) ( )
2Pero podemos calcular '( ) y ''( )
'( ) ( , ( ))( , ( )) ( , ( ))''( ) '( )
( , ( )) ( , ( )) ( , ( ))
i i i i
i i
i i i
i i i ii i
i i i ii i
hy t h y t y t h y t O h
y t y ty t f t y t
f t y t f t y ty t y tx y
f t y t f t y t f t y tx y
+ = + + +
=∂ ∂
= +∂ ∂
∂ ∂= + ⋅
∂ ∂
Aproximación de la solución por serie de Taylor de segundo orden alrededor de it t=

12
2
( ) ( )
( ) '( ) ''( )2
( , ( )) ( , ( )) = ( ) ( , ( )) ( , ( ))2
i i
i i i
i i i ii i i i i
y t y t hhy t y t h y t
f t y t f t y t hy t f t y t h f t y tx y
+ = +
≅ + +
∂ ∂+ + + ⋅ ∂ ∂
La aproximación obtenida está dada por
2
1
De esta forma,
( , ( )) ( , ( ))( )= ( ) ( , ( )) ( , ( ))2
i i i ii i i i i i
f t y t f t y t hy t y t f t y t h f t y tx y+
∂ ∂+ + + ⋅ ∂ ∂

( ) ( )( , ) ( , )( , ) ( , ) i i i ii i i i
f t y f t yf t H y K f t y H Kt y
∂ ∂+ + ≈ + +
∂ ∂
Aproximación por Serie de Taylor a primer orden de una función de dos variables
2kPara aproximar tomamos1 11 1 y H p h K q k h= =
De esta forma, obtenemos
[ ] [ ]2 1 11 1
1 11 1
( , )( , ) ( , ) ( , )
i i
i i i ii i
k f t p h y q k hf t y f t yf t y p h q k h
t y
= + +∂ ∂
= + ⋅ + ⋅∂ ∂

De esta forma
[ ] [ ]
[ ]
[ ]
1 1 2 2
1 2 1 11 1
1 2 2 1 2 11 1
1 2 2 1 2 11
( , ) ( , ) = ( , ) ( , )
( , ) ( , ) = ( , )
( , ) ( , ) = ( , ) ( , )
i i i ii i i i
i i i ii i
i i i ii i i i
a k a k
f t y f t ya f t y a f t y p h q k ht y
f t y f t ya a f t y h a p a q kt y
f t y f t ya a f t y h a p a q f t yt y
ϕ = +
∂ ∂+ + ⋅ + ⋅ ∂ ∂
∂ ∂+ + + ∂ ∂
∂ ∂+ + +
∂ ∂

En consecuencia,
[ ]
[ ]
1 1
1 2 2 1 2 11
21 2 2 1 2 11
( ) ( )
( , ) ( , ) = ( ) ( , ) ( , )
( , ) ( , ) = ( ) ( , ) ( , )
i i i i
i i i ii i i i i
i i i ii i i i i
y y t y h y t h
f t y f t yy t a a f t y h a p a q f t y ht y
f t y f t yy t a a f t y h a p a q f t y ht y
ϕ ϕ+ +≅ = + = +
∂ ∂+ + + + ∂ ∂
∂ ∂+ + + + ∂ ∂
[ ] 21 1 2 2 1 2 11
En resumen,
( , ) ( , )( ) ( ) ( , ) ( , )i i i ii i i i i i
f t y f t yy t y t a a f t y h a p a q f t y ht y+
∂ ∂= + + + + ∂ ∂

Hemos obtenido dos aproximaciones para , a saber:1( )iy t +
2
1( , ( )) ( , ( ))( )= ( ) ( , ( )) ( , ( ))
2i i i i
i i i i i if t y t f t y t hy t y t f t y t h f t y t
x y+
∂ ∂+ + + ⋅ ∂ ∂
[ ] 21 1 2 2 1 2 11
( , ) ( , )( ) ( ) ( , ) ( , )i i i ii i i i i i
f t y f t yy t y t a a f t y h a p a q f t y ht y+
∂ ∂= + + + + ∂ ∂
Igualando coeficientes
1 2 2 1 2 111 11, y 2 2
a a a p a q+ = = =
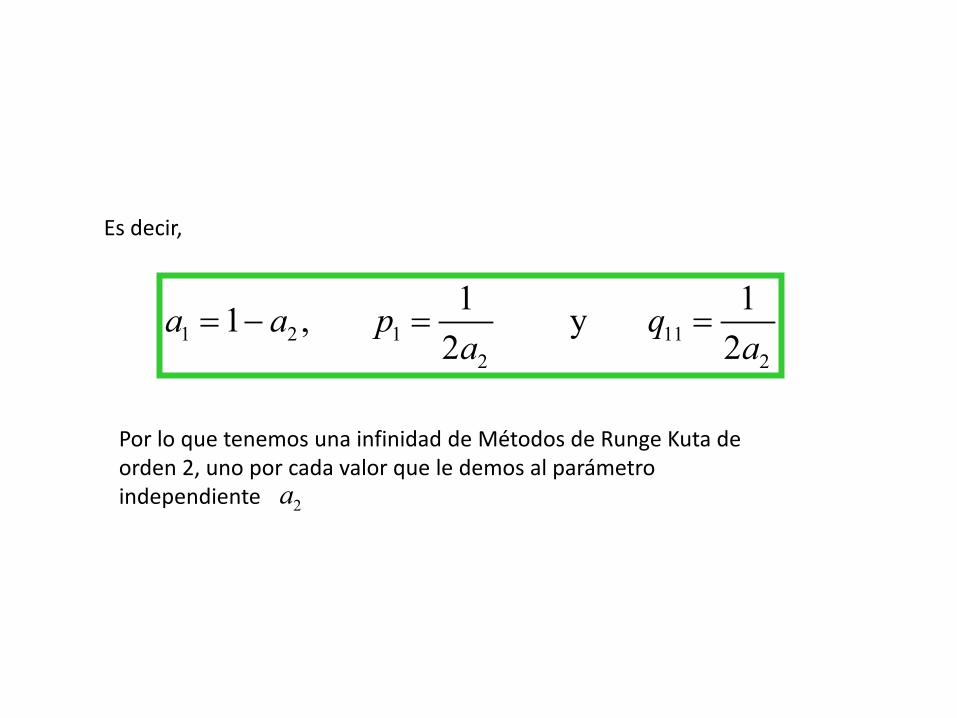
Es decir,
1 2 1 112 2
1 11 , y 2 2
a a p qa a
= − = =
Por lo que tenemos una infinidad de Métodos de Runge Kuta de orden 2, uno por cada valor que le demos al parámetro independiente 2a

Casos particulares
1 2 1 111 12
a a p q= = ⇒ = =
[ ]1
1 1 2 2 1 212
i iy y h
a k a k k k
ϕ
ϕ
+ = +
= + = +
1
2 1 11 1
1
( , )( , )
( , ) = ( , ( , ) )
i i
i i
i i
i i i i
k f t yk f t p h y q k h
f t h y k hf t h y f t y h
== + += + +
+ +
donde
Por lo tanto
11
( , ) ( , )2
i i i ii i
f t y f t h y k hy y h+
+ + + = +
¡¡¡¡¡¡¡Euler modificado (Heun o predictor-corrector)!!!!!!

Casos particulares1 2 1 11
10, 12
a a p q= = ⇒ = = 1
1 1 2 2 2
i iy y ha k a k k
ϕϕ
+ = += + =
2 1 11 1( , )1 1 ( , ( , ) )2 2
i i
i i i i
k f t p h y q k h
f t h y f t y h
= + +
= + +
donde
Por lo tanto1 1
1 1
( , ) = ( , )
i i i i
i i i
y y f t h y k h hy f t y k h h
+
+
= + + ++ +

1 1
1 1
( , ) = ( , )
i i i i
i i i
y y f t h y k h hy f t y k h h
+
+
= + + ++ +
1 1 ( , )i i i i iy y k h y f t y h+ = + = +
1 1
1 1
( , ) = ( , )
i i i i
i i i
y y f t h y k h hy f t y h
+
+ +
= + + ++
Se conoce como Euler hacia atrás

1iy +1iy +
iy
( , )i if t y
it 1it +
1 1( , )i if t y+ +
t
y
Geometría del método
h