






Idiomas
Páginas
Jurídico


5. Control PID Clásico
Virginia MazzoneIACI - DCYT - UNQ
Panorama:
Estructura PID
Ajuste empírico
Método de oscilación de Ziegler-Nichols
Métodos basados en la respuesta al escalón (curva de reacción)
Compensadores en atraso-adelanto
PLCs
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Introducción
En este capítulo examinamos una particular estructura decontrol que es casi universalmente utilizada en la industria. Setrata de la familia de controladores de estructura fija llamadafamilia de controladores PID.
Estos controladores han mostrado ser robustos yextremadamente beneficiosos en el control de muchasaplicaciones de importancia en la industria.
PID significaProporcional,IntegralDerivativo.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Introducción
Históricamente, ya las primeras estructuras de control usabanlas ideas del control PID. Sin embargo, no fue hasta el trabajode Minorsky de 1922, sobre conducción de barcos,1 que elcontrol PID cobró verdadera importancia teórica.
Hoy en día, a pesar de la abundancia de sofisticadasherramientas y métodos avanzados de control, el 1controladorPID es aún el más ampliamente utilizado en la industriamoderna, controlando más del 95% de los procesosindustriales en lazo cerrado.2
1Minorsky, «Directional stability of automatically steered bodies», Journalof the American Society of Naval Engineering, Vol. 34, p. 284, 1922.
2K.J. Åström & T.H. Hägglund, «New tuning methods for PID controllers,»Proceedings of the 3rd European Control Conference, p.2456–62.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Estructura PID
Consideramos el lazo básico de control SISO
� ��h h--
6
- -+
−K (s) Planta
R(s) E(s) U(s) Y (s)
P: acción de control proporcional, da una salida delcontrolador que es proporcional al error, es decir,u(t) = KP e(t), o
Kp(s) = Kp
donde Kp es una ganancia proporcional ajustable. Uncontrolador proporcional puede controlar cualquier plantaestable, pero posee desempeño limitado y error enrégimen permanente (off-set).
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Estructura PID
I: acción de control integral: da una salida delcontrolador que es proporcional al error acumulado, lo queimplica que es un modo de controlar lento.
u(t) = Ki
∫ t
0e(τ)dτ Ki(s) =
Ki
s
La señal de control u(t) tiene un valor diferente de cerocuando la señal de error e(t) es cero. Por lo que seconcluye que dada una referencia constante, operturbaciones, el error en régimen permanente es cero.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Estructura PID
PI: acción de control proporcional-integral, se definemediante
u(t) = Kpe(t)+Kp
Ti
∫ t
0e(τ)dτ KPI(s) = Kp
(1+
1Tis
)donde Ti se denomina tiempo integral y es quien ajusta laacción integral.Con un control proporcional, es necesario que exista errorpara tener una acción de control distinta de cero. Conacción integral, un error pequeño positivo siempre nosdará una acción de control creciente, y si fuera negativo laseñal de control será decreciente. Este razonamientosencillo nos muestra que el error en régimen permanenteserá siempre cero.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Estructura PID
PD: acción de control proporcional-derivativa, sedefine mediante
u(t) = Kpe(t)+KpTdde(t)
dtKPD(s) = Kp +sKpTd
donde Td es una constante de denominada tiempoderivativo. Esta acción tiene carácter de previsión, lo quehace más rápida la acción de control, aunque tiene ladesventaja importante que amplifica las señales de ruido ypuede provocar saturación en el actuador. La acción decontrol derivativa nunca se utiliza por sí sola, debido a quesólo es eficaz durante períodos transitorios.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Estructura del PID
PID: acción de control proporcional-integral-derivativa,esta acción combinada reune las ventajas de cada una delas tres acciones de control individuales. La ecuación deun controlador con esta acción combinada se obtienemediante
u(t) = Kpe(t)+Kp
Ti
∫ t
0e(τ)dτ +KpTd
de(t)dt
y su función transferencia resulta
KPID(s) = Kp
(1+
1Tis
+Tds)
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ajuste empírico de controladores PID
Debido a su difundido uso en la práctica, presentamos acontinuación varios métodos de ajuste empírico decontroladores PID, basados en mediciones realizadas sobre laplanta real. Estos métodos, referidos como clásicos,comenzaron a usarse alrededor de 1950.
Hoy en día, es preferible para el diseñador de un PID usartécnicas basadas en modelo, como las que describiremos enlos Capítulos 6 y 10 del presente curso.
Los métodos clásicos de ajuste que presentaremos sonEl método de oscilación de Ziegler-NicholsEl método de la curva de reacción de Ziegler-NicholsEl método de la curva de reacción de Cohen-Coon
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Método de oscilación de Ziegler-Nichols
Este método es válido sólo para plantas estables a lazoabierto. El procedimiento es el siguiente:
R(s)
−Kp Planta
U(s) Y (s)
1 Aplicar a la planta sólo control proporcional con gananciaKp pequeña.
2 Aumentar el valor de Kp hasta que el lazo comience aoscilar. La oscilación debe ser lineal y debe detectarse enla salida del controlador (u(t)).
3 Registrar la ganancia crítica Kp = Kc y el período deoscilación Pc de u(t), a la salida del controlador.
4 Ajustar los parámetros del controlador PID de acuerdo alCuadro ??.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Método de oscilación de Ziegler-Nichols
Kp Tr Td
P 0,50Kc
PI 0,45KcPc
1,2
PID 0,60KcPc
2Pc
8
Es importante saber cuál es la estructura (estándar, serie oparalelo) del PID al que se aplica el ajuste propuesto porZiegler y Nichols. Existe cierta controversia respecto a cuál fuela estructura originalmente usada por Ziegler y Nichols; lasreglas dadas aquí se proponen para la estructura estándar.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Desempeño con el método de oscilación de Z-N
Notar que el modelo intrínsecamente obtenido en elexperimento es sólo un punto de la respuesta en frecuencia,que corresponde a fase −180◦ y magnitud K−1
c , dado que eldiagrama de Nyquist cruza el punto (−1,0) cuando Kp = Kc .
Para analizar el efecto del ajuste de control proporcionado porel método de oscilación de Ziegler-Nichols consideremos unaplanta general con función transferencia
G0(s) =k0e−sτ0
γ0s+1; γ0 > 0. (1)
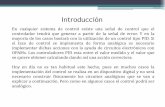
La Figura 1 muestra la respuesta del lazo cerrado con uncontrolador PID ajustado mediante el método de oscilación deZiegler-Nichols para distintos valores de x = τ0/γ0. El eje detiempos se representa normalizado en unidades de t/τ0.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Figura: Respuesta a lazo cerrado de la planta (1) con PID ajustadomediante el método de oscilación de Ziegler-Nichols
Vemos que el ajuste es muy sensible al cociente τ0/γ0. Otralimitación es que se require forzar en la planta una oscilaciónque puede ser peligrosa o inconveniente en muchos casos.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo
Considerar el modelo de una planta dado por:
G0(s) =1
(s+1)3
Determinar los parámetros de un controlador PID utilizando elmétodo de oscilación de Z-N. Obtener un gráfico de larespuesta a una entrada escalón unitario y a una perturbaciónde entrada escalón unitario.Solución: Primero debemos calcular la ganancia crítica Kc yla frecuencia crítica ωc . Dichos valores deben satisfacer
KcG0(jω0) =−1 ⇔ Kc =−(jωc +1)3,
de donde obtenemos Kc = 8 y ωc =√
3. El período crítico esentonces Pc =
2π
ωc' 3,63. Utilizando la tabla obtenemos:
Kp = 0,6Kc = 4,8; Ti = 0,5Pc = 1,81; Td = 0,25Pc = 0,45
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo
De esta forma la función transferencia a lazo abierto resulta:
G0(s)K (s) = KpTds2 +s+ 1
Ti
s(s+1)3 =2,16s2 +4,8s+2,652
s(s+1)3
0 2 4 6 8 10 12 14 16 18 200
0.3
0.6
0.9
1.2
1.5
Controlador PID ajustado con Z−N (método de oscilación)
Tiempo [s]
Sal
ida
de la
pla
nta
Figura: Salida del sistema controlado con un PID, con referenciaescalón unitario en t = 0 y perturbación de entrada escalón unitarioen t = 10.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Método de la curva de reacción de Ziegler-Nichols
Muchas plantas en la práctica pueden describirsesatisfactoriamente con un modelo de la forma (1). Este modelopuede obtenerse mediante el siguiente procedimiento:
1 Llevar manualmente la planta a lazo abierto a un punto deoperación normal manipulando u(t). Supongamos que laplanta se estabiliza en y(t) = y0 para u(t) = u0.
2 En un instante inicial t0 aplicar un cambio escalón en laentrada, de u0 a u∞ (el salto debe estar entre un 10 a 20%del valor nominal.
3 Registrar la respuesta de la salida hasta que se estabiliceen el nuevo punto de operación. La Figura 3 muestra unacurva típica.
4 Calcular los parámetros del modelo (1) de las fórmulas
k0 =y∞−y0
u∞−u0, τ0 = t1− t0, γ0 = t2− t1. (2)
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Método de la curva de reacción de Ziegler-Nichols
y0
y(t)y∞
t[s]
Máxima pendiente tangente
t0 t1 t2
Figura: Respuesta al escalón (curva de reacción) en lazo abierto dela planta
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Los parámetros del controlador PID propuestos por Ziegler yNichols a partir de la curva de reacción se determinan delCuadro 1.
Kp Tr Td
Pγ0
K0τ0
PI0,9γ0
K0τ03τ0
PID1,2γ0
K0τ02τ0 0,5τ0
Cuadro: Parámetros de controladores PID según el método de lacurva de reacción de Ziegler-Nichols
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Desempeño con el método de la CR de Z-N
Consideramos nuevamente la planta genérica (1) para analizarel desempeño obtenido con el ajuste de Ziegler-Nichols a partirde la curva de reacción.
Figura: Respuesta a lazo cerrado de la planta (1) con PID ajustadode la curva de reacción vía Ziegler-Nichols
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Método de la curva de reacción de Cohen-Coon
La Figura 4 muestra que el ajuste de Ziegler y Nichols para lacurva de reacción es muy sensible a variaciones de τ/γ0.Cohen y Coon desarrollaron una tabla modificada para mejoraresta limitación usando datos del mismo ensayo.
Kp Tr Td
Pγ0
K0τ0
(1+
τ0
3γ0
)PI
γ0
K0τ0
(0,9+
τ0
12γ0
)τ0(30γ0 +3τ0)
9γ0 +20τ0
PIDγ0
K0τ0
(43+
τ0
4γ0
)τ0(32γ0 +6τ0)
13γ0 +8τ0
4τ0γ0
11γ0 +2τ0
Cuadro: Parámetros de controladores PID según el método de lacurva de reacción de Cohen-Coon
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Desempeño con el método de la CR de C-C
La Figura 5 muestra la respuesta de lazo cerrado con el ajusteCohen-Coon. Aunque aún es sensible a x = τ/γ0, la respuestaes mucho más homogénea que con el ajuste Ziegler-Nichols.
Figura: Respuesta a lazo cerrado de la planta (1) con PID ajustadode la curva de reacción vía Cohen-Coon
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo
Consigeremos la planta del ejemplo anterior G(s) =1
(s+1)3 ,
obtenemos la respuesta al escalón y los parámetros
t0 = 0 u0 = 0 y0 = 0
t1 = 0,86 u∞ = 1 y∞ = 1
t2 = 4,6
k0 = 1 τ0 = 0,86 γ0 = 3,74
Z-N C-CKp = 3,91 Kp = 6,04Ti = 1,72 Ti = 1,93Td = 0,43 Td = 0,30
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo
Respuesta al escalón a lazo cerrado
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Modificaciones de los esquemas de control PID
En los sistemas de control básicos vistos hasta ahora, si laentrada de referencia es un escalón, debido a la presencia deltérmino derivativo en la acción de control, la variablemanipulada u(t) contendrá una función impulso (una delta). Enun controlador PID real, en lugar del término derivativo TDsemplearemos:
TdsτDs+1
(3)
donde τD, denominada constante de tiempo derivativa,normalmente es elegida tal que 0,1≤ τD ≤ 0,2. Cuanto máspequeña es τD, mejor es la aproximación entre el término“derivativo filtrado” de (3) y el ”derivativo” Tds, es decir soniguales en el límite
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Modificaciones de los esquemas de control PID
Es decir
l«ımτd→0
uPID(t) = Kpe(t)+Kp
Ti
∫ t
t0e(τ)dτ +KpTd
de(t)dt
Con la inclusión de un polo evitamos utilizar acciones decontrol grandes en respuesta a errores de control de altafrecuencia, tales como errores inducidos por cambios deset-point (referencia) o mediciones de ruido. El argumentoclásico por el cual se elige τD 6= 0 es, además de asegurar uncontrolador propio, para atenuar ruido de alta frecuencia. Casitodos los controladores industriales PID definen a τD como unafracción fija de Td , en lugar de tomarlo como un parámetroindependiente de diseño.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo
Analicemos nuevamente el Ejemplo, pero tomando ahora comofunción transferencia del controlador PID a
KPID(s) = Kp
(1+
1Tis
+Tds
τDs+1
)(4)
Por lo que la función transferencia a lazo abierta resulta ser
Go(s)C(s) =Kp(Td + τD)s2 +(1+ τD
Ti)s+ 1
Ti
s(τDs+1)Go(s)
Con el mismo desarrollo anteriormente explicado obtenemoslos mismos parámetros del PID aplicando el método deoscilación de Z-N. Tomando a τD = 0,1 y Td = 0,045, la funcióntransferencia a lazo abierto resulta
Go(s)C(s) =52,8s2 +109,32s+58,93
s(s+22,2)(s+1)3
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Discretización de PID
Discretización de Euler
Recordemos que e(kT ), ek , de esta forma
������������������������������������
������������������������������������
��������������������������
����������������������
����������������������
���������������
���������������
��������
��������
e(t)
t
ekek−1
· · ·
T
1 2 k −10 k
de(t)dt≈ ek −ek−1
Ty
∫ t
0e(τ)dτ ≈
k−1
∑i=0
T ei
De esta forma la expresión del PID discreto queda:
uk = Kp
[ek +
TTi
k−1
∑i=0
ei +Td
T(ek −ek−1)
]
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Discretización de PID
Para evitar guardar k −1 valores del error, calculamos
uk−1 = Kp
[ek−1 +
TTi
k−2
∑i=0
ei +Td
T(ek−1−ek−2)
]si restamosuk−uk−1 =Kp (ek −ek−1)+
KpTTi
ek−1+KpTd
T(ek −2ek−1 +ek−2)
por lo tanto
uk =
(Kp +
KpTd
T
)︸ ︷︷ ︸
q0
ek +
(KpTTi−Kp−2
KpTd
T
)︸ ︷︷ ︸
q1
ek−1 +KpTd
T︸ ︷︷ ︸q2
ek−2 +uk−1
Así
KPID(z) =U(z)E(z)
=q0 +q1z−1 +q2z−2
1−z−1
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Discretización de PID
Bilineal o Tustin:Comsideremos la aproximación de la integral
∫ t
0e(τ) dτ ≈
k
∑i=0
Tei −ei−1
2
������������
������������
��������������
��������������
������������������������������������
������������������������������������
��������������������������
��������������������������
��������������������������
e(t)
t
ekek−1
· · ·
T
1 2 k −10 k
De esta forma resulta
uk =
(Kp +
Kp
2Ti+
KpTdT
)︸ ︷︷ ︸
q0
ek +
(KpT2T1
−2KpTd
T−Kp
)︸ ︷︷ ︸
q1
ek−1+KpTd
T︸ ︷︷ ︸q2
ek−2+uk−1
KPID(Z ) =U(z)E(z)
=q0 +q1z−1 +q2z−2
1−z−1
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo
Consideremos la planta cuyo modelo nominal viene dado por
G0(s) =1
s+1e−0,1s
Utilizando el ajuste de Z-N, con k0 = 1, τ0 = 0,1 y γ0 = 1obtenemos
Kp = 12 Ti = 0,2 Td = 0,05
Considerando T1 = 0,1 seg. y T2 = 0,05 seg., los controladoresdiscretizados resultan
Aprox. Euler Aprox. Tustin
K1(z) =18−18z−1 +6z−2
1−z−1 K1(z) =48−21z−1 +6z−2
1−z−1
K2(z) =24−33z−1 +12−2
1−z−1 K2(z) =54−34,5z−1 +12−2
1−z−1
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Compensadores en Atraso-Adelanto
Una idea muy cercana a la del control PID es la decompensación en atraso-adelanto. La función transferenciade estos compensadores es de la forma
K (s) =τ1s+1τ2s+1
.
-e6
σ
jω
0x
τ2−1 τ1
−1
Si τ1 > τ2 el compensador esuna red de adelanto.
-
6
σ
jω
0e x
τ1−1 τ2
−1
Si τ1 < τ2 el compensador esuna red de atraso.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Compensadores en Atraso-Adelanto
Las redes de atraso y adelanto permiten modificarlocalmente la respuesta en frecuencia de la planta,respectivamente agregando o restando fase, dentro delrango de frecuencias comprendido entre el cero y el polodel compensador.El compensador final en un diseño dado podía construirsecomo la cascada de varias redes de atraso o adelanto. Deesta forma el diseño se subdividía en etapas, en cada unade las cuales se modificaban porciones específicas de larespuesta en frecuencia de la planta.Estos compensadores eran muy fácilmente ajustados enforma gráfica utilizando los diagramas de Bode o Nyquist.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Compensadores en Atraso-Adelanto
La red de adelanto aumenta la fase del sistema dentro de unrango limitado de frecuencias.
−3
10−2
10−1
100
101
102
103
10
0
2
4
6
8
10
12
14
.
Magnitud
Hz
db
−3
10−2
10−1
100
101
102
103
10
0
4
8
12
16
20
24
28
32
36
40
.
Fase
Hz
degrees
Diagrama de Bode de una red de adelanto.Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Compensadores en Atraso-Adelanto
La red de atraso disminuye la fase del sistema dentro de unrango limitado de frecuencias.
−3
10−2
10−1
100
101
102
103
10
−14
−12
−10
−8
−6
−4
−2
0
.
Magnitud
Hz
db
−3
10−2
10−1
100
101
102
103
10
323
327
331
335
339
343
347
351
355
359
363
. Hz
degreesFase
Diagrama de Bode de una red de atraso.Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Compensadores en Atraso-Adelanto
Re
Im
Compensado
Sin Compensar
−1 0
Magnitud
Fase
Sin compensar
Compensado
−90
−180
−270
0dB
Efecto de compensación por adelanto en una planta de tipoG0(s) = 1
s(α1s+1)(α2s+1) en diagrama de Nyquist (izquierda) yBode (derecha).
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

PLCs (Controladores de Lógica Programable)
Los PLCs son una forma muy habitual de implementar controladoresPID en la industria.
Un PLC es, en pocas palabras, unaPC dedicada con puertos de entraday salida para comunicarse con el pro-ceso a controlar. Contiene una CPU,memoria, y circuitos de entrada y sali-da.
Históricamente, los PLCs surgieron a fines de los años 1960s parareemplazar complicados sistemas de control basados en relés.Bedford Associates propuso a una fábrica de automóviles algollamado MODICON (Modular Digital Controller — controlador digitalmodular), que luego daría lugar al primer PLC comercial, elMODICON 084.
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

PLCs (Controladores de Lógica Programable)
Un PLC funciona ejecutando un programa en un ciclo deoperación continuo. Este ciclo de operación consiste,esencialmente, de 3 pasos importantes:
1 Muestrear los circuitos de entrada,2 Ejecutar un programa,3 Actualizar los circuitos de salida.
Un controlador como un PID se implementa en un algoritmoparte del programa del PLC, y está generalmente disponiblecomo parte de una librería de algoritmos. La forma del PIDimplementada depende de la marca y modelo de PLC.Algunas de estas marcas:
ABB
Festo/BeckElectronic
Honeywell
Modicon/Gould
Rockwell/Allen-
Bradley
Schneider
Siemens
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Ejemplo: bloque PID en el PLC-5 de Allen-BradleyTiene 4 formas disponibles:
1 PID con acción derivativa en la salida, forma estándar
u = Kc
([1+
1Tis
]e+
[Td s
1+ Td16 s
]y
)+bias
2 PID con acción derivativa en el error, forma estándar
u = Kc
([1+
1Tis
]+
[Td s
1+ Td16 s
])e+bias
3 Variación de 1, forma paralela
u =
[Kp +
Ki
s
]e+
Kd s
1+ Kd16Kp
s
y +bias
4 Variación de 2, forma paralela
u =
Kp +Ki
s+
Kd s
1+ Kd16Kp
s
e+bias
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico

Más sobre PLCs. . .
Para mayor información sobre PLCs ver por ejemplohttp://www.plcs.net
http://www.plcopen.org
En IACI, los PLCs se estudian en profundidad enLaboratorio de Automatización I y II,
ambas fuertemente recomendadas!
Virginia MazzoneIACI - DCYT - UNQ 5. Control PID Clásico