Y FUNDAMENTOS
23
EA0420 TRIGONOMETRÍA Y FUNDAMENTOS DE ESTÁTICA Estática Bloque 1
Transcript of Y FUNDAMENTOS
EA0420
TRIGONOMETRÍA Y FUNDAMENTOS DE ESTÁTICA
Estática
Bloque 1

2
ESTÁTICA
El presente material recopila una serie de definiciones, explicaciones, ejemplos y ejercicios prácticos de autores especializados que te ayudarán a comprender los temas principales de este bloque.
Las marcas empleadas en la antología son única y exclusivamente de carácter educativo y de investigación, sin fines lucrativos ni comerciales.

3
ESTÁTICA
1. Trigonometría
La trigonometría es una rama de las matemáticas que se enfoca en el estudio de los triángulos a partir de los elementos que lo conforman (tres lados y sus respectivos ángulos); así como el uso de funciones trigonométricas, el teorema de Pitágoras, ley de senos y cosenos, herramientas que permiten un análisis apropiado de figuras triangulares. Por lo anterior, la trigonometría aporta a la arquitectura parte de los fundamentos matemáticos para analizar y solucionar problemas relacionados con el comportamiento de la fuerza en una estructura en reposo.
1.1. Teorema de Pitágoras
Resolver un problema en el que se encuentre involucrada una figura triangular conlleva a determinar las longitudes de sus lados y las medidas de los ángulos que le faltan. En el caso de que se trate de un triángulo rectángulo, es necesario aplicar el teorema de Pitágoras, que establece que en todo triángulo rectángulo la suma de los cuadrados de las longitudes de los catetos (lados) al cuadrado es igual a la longitud de la hipotenusa al cuadrado (Zill y Dewar, 2012b). Lo anterior, algebra y gráficamente, se re-presenta de la siguiente manera:
Teorema de Pitágoras 2 + B2 = C2
Figura 1. Triángulo rectángulo
Hipotenusac
c
bCateto opuesto
Cateto adyacente
Trigonometría y fundamentos de estática

4
ESTÁTICA
En la Figura 1 podemos identificar que el triángulo rectángulo posee un ángulo recto de 90 °, opuesto a éste se encuentra la hipotenusa; un ángulo agudo marcado como . Respecto al ángulo , los catetos del triángulo, adyacente al ángulo indicado con y el cateto opuesto al ángulo con b (Zill y Dewar, 2012b).
1.2. Triángulos rectángulos, funciones trigonométricas
Dado que la suma de los cuadrados de los catetos de un triángulo es igual a la hipotenusa elevada al cuadrado. Si se desea conocer el valor de la hipotenusa se procede a realizar un despeje matemático; el cual consiste en colocar la raíz cuadrada en ambos lados para eliminar el cuadrado de la hipotenusa. Con lo anterior, se muestra a continuación el nuevo modelo matemático del teorema de Pitágoras.
c = √ 2 + b2
En estas condiciones, las funciones trigonométricas del ángulo agudo en un triángulo rectángulo en función de sus lados se definen de la siguiente manera:
Cuadro 1. Funciones trigonométricas
Función Recíproca
sin = =bc
cateto opuestohipotenusa sec = = hipotenusa
cateto adyacentec
cos = = cateto adyacentehipotenusac csc = = hipotenusa
cateto opuestocb
tan = =b cateto opuesto cateto adyacente csc = = cateto adyacente
cateto opuestob
Elaborado a partir de Zill y Dewar (2012b).
Estas funciones expresan la relación entre los elementos del triángulo y permiten calcular la medida del lado o ángulo agudo que integra el triángulo rectángulo, según sea necesario. Revisemos en el siguiente subtema cómo se utilizan para solucionar problemas en los que se involucran triángulos rectángulos.
1.3. Solución de problemas de aplicación utilizando triángulos rectángulos
Numerosas aplicaciones de la trigonometría de triángulos rectángulos implican su resolución; por ejem-plo, en el ámbito de la navegación, la topografía, el diseño estructural y arquitectónico, entre otros.
5
ESTÁTICA
Ejemplo:
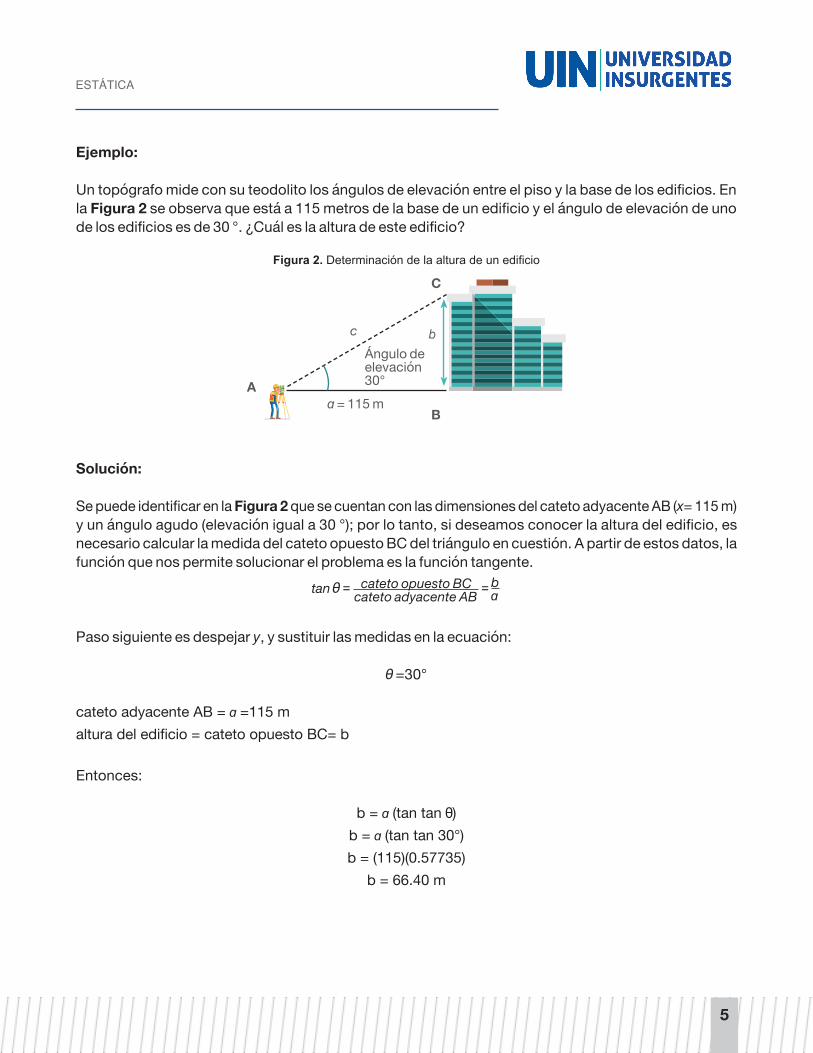
Un topógrafo mide con su teodolito los ángulos de elevación entre el piso y la base de los edificios. En la Figura 2 se observa que está a 115 metros de la base de un edificio y el ángulo de elevación de uno de los edificios es de 30 °. ¿Cuál es la altura de este edificio?
Figura 2. Determinación de la altura de un edificio
Ángulo de elevación30°
c b
A
B
C
= 115 m
Solución:
Se puede identificar en la Figura 2 que se cuentan con las dimensiones del cateto adyacente AB (x= 115 m) y un ángulo agudo (elevación igual a 30 °); por lo tanto, si deseamos conocer la altura del edificio, es necesario calcular la medida del cateto opuesto BC del triángulo en cuestión. A partir de estos datos, la función que nos permite solucionar el problema es la función tangente.
tan = = cateto opuesto BC cateto adyacente AB
b
Paso siguiente es despejar y, y sustituir las medidas en la ecuación:
=30°
cateto adyacente AB = =115 maltura del edificio = cateto opuesto BC= b
Entonces:
b = (tan tan )b = (tan tan 30°)b = (115)(0.57735)
b = 66.40 m

6
ESTÁTICA
Por lo tanto, la altura del edificio es de 66.40m .
Revisemos otro ejemplo, donde la necesidad sea calcular la medida de un ángulo y la hipotenusa. Se tiene que:
Una torre de 10 m de altura proyecta una sombra de 12 m de longitud, como se ve en la Figura 3. Calcula el ángulo de elevación del sol y la distancia desde el extremo superior de la torre al punto A.
Figura 3. Ángulo de elevación y altura
c
AB
b = 10 m
= 12 m
Solución
Primero realizaremos el cálculo del ángulo:
De la Figura 3 se observa que respecto al ángulo se cuenta con las medidas de dos catetos.
cateto adyacente AB = = 12 mcateto opuesto BC = b =10 m
Dado que el elemento que se requiere calcular es el ángulo de la elevación del sol respecto a la torre ( ), utilizamos nuevamente la función de la tangente.
tan = = cateto opuesto BC cateto adyacente AB
b
tan = = =0.83b 1012
Porque nos interesa calcular el ángulo, despejamos la tangente utilizando su inversa.
= (0.83) ≈ 40º

7
ESTÁTICA
Por lo tanto, el ángulo de elevación del sol es aproximado a 40º .
Ahora calculemos la distancia desde el extremo superior de la torre al punto A; es decir, la hipotenusa del triángulo.
En este caso retomamos el teorema de Pitágoras que indica que la suma de los cuadrados de los catetos es igual al cuadrado de la hipotenusa:
2 + b2 = c2
Tenemos que las medidas de los catetos son:
cateto adyacente AB = = 12 mcateto opuesto BC = b = 10 m
Por lo tanto, al sustituir los datos obtenemos:
c2 = (12) 2 + (10)2
Eliminamos la elevación al cuadrado de la hipotenusa para obtener la medida en metros.
c =√(12)2+(10)2 = 15.62 m
Por lo tanto, la distancia desde el extremo superior de la torre al punto A, es decir, la hipotenusa del triángulo, es igual a 15.62 m.
1.4. Áreas de figuras planas
En la vida cotidiana el uso de las figuras planas es muy común, ya que se presentan de manera involun-taria. Dentro de la rama de la arquitectura estas figuras planas se pueden ubicar en toda la construcción, diseños, boceto, cálculos, entre otros; en donde al estar definidas permiten dar una justificación cientí-fica y artesanal, como por ejemplo fachadas, techos, ventanas, puertas, lonarias, aparejos, entre otros.
Como elemento básico de la geometría, una figura plana está comprendida por una altura y longitud, no presenta espesor por estar en 2D (dos dimensiones); por lo que la o las líneas que conformen a la figura plana deben juntarse en diferentes puntos para formar una figura cerrada y determinar, a partir de ello, su forma y calcular sus dimensiones.
Las áreas de las figuras planas pueden calcularse mediante las fórmulas matemáticas correspondientes, por ejemplo:

8
ESTÁTICA
� Rectángulo. El área es igual al producto de sus lados.
Área = b×
� Cuadrado. El cuadrado es un rectángulo con sus cuatro lados iguales. Su área es igual al cuadrado del lado.
Área = 2
� Paralelogramo. Su área es el producto de su base por su altura. Dado que el paralelogramo es equivalente a un rectángulo con su misma base y altura.
Área = b×h
El paralelogramo está conformado por dos figuras planas iguales, en este caso: dos triángulos, visibles al trazar una línea que toque dos esquinas del paralelogramo de manera diagonal. El área del paralelogramo se puede obtener multiplicando dos lados consecutivos por el seno del ángulo que forman esos dos lados.
Área = b sin A
� Triángulo. El área puede determinarse por el semiproducto de la base por la altura divido entre dos.
Área = b·h2
Otra manera de obtener el área de un triángulo es con la fórmula de Herón.
Área = √s(s- )(s-b)(s-c)
Donde s es el semiperímetro y , b, c,la longitud de cada uno de los lados del triángulo. Los lados que conforman al triángulo pueden considerarse como base o altura, dependiendo de cómo se consideren; por ejemplo, el cateto opuesto puede ser la altura, mientras la hipotenusa o cateto adyacente pueden ser las bases del mismo.
� Polígono cualquiera. La fórmula para calcular el área de todo polígono regular es el semiproducto del perímetro y su apotema dividido entre dos.
Área = P x 2
Se parte de descomponer el polígono en varios triángulos no sobrepuestos; el área es la suma de tales triángulos.

9
ESTÁTICA
� Círculo. El área está dada por el producto de por el cuadrado del radio.
Área=π×r2
Puede considerarse como la suma de pequeños triángulos, cuya base son arcos muy pequeños de la circunferencia, y por altura el radio (Baldor, Santaló y Suardíaz, 2006).
Ejemplo:
Un espejo circular está montado en un marco de forma hexagonal. Se sabe que el diámetro de la circun-ferencia del espejo es de 40 cm y el lado del hexágono regular correspondiente al marco es de 40 cm. Se requiere conocer la superficie del marco.
Figura 4. Espejo circular con marco hexagonal
40 cm
40 cm
Solución:
Como primer paso, calculamos el área del espejo interior de figura circular. Donde:
A = r2
A = (20)2
Área círculo = 1,256.64 cm2
El paso siguiente es calcular el área del hexágono, por lo cual se necesita conocer el perímetro y la apotema.
Perímetro: P=40×6=240 cm
En los hexágonos regulares, los triángulos interiores son equiláteros, por lo tanto, para conocer la apo-tema se aplica el teorema de Pitágoras. Véase la Figura 5.

10
ESTÁTICA
Figura 5. Triangulación de un polígono para obtener la apotema
40 cm 20 cm
40 cmp
Apotema:
2 + b2 = c2
402 = 20 2 + p2
p2 = 1600 - 400p = √1200
p = 34.64 cm
Sustituimos los datos en la fórmula para obtener el área del hexágono:
A = P x p2
A = 240 x 34.642
A = 4 156.8 cm2
Finalmente, el área del marco es la diferencia entre el área del hexágono y el área de la circunferencia interior:
A = 4 156.80-1 256.64Área total del marco hexagonal=2 900.16 cm2
1.5. Leyes de los senos y de los cosenos
Estas leyes se utilizan cuando no son ángulos rectángulos, es decir que no tienen un ángulo interno de 90 º. En la Figura 6 se muestran dos triángulos oblicuángulos, los cuales se caracterizan por tener tres ángulos agudos o dos agudos y uno obtuso. Resolver un triángulo oblicuo significa encontrar las longitudes de sus lados y las medidas de sus ángulos; en el caso de triángulos oblicuángulos, se utiliza la ley de los senos.

11
ESTÁTICA
Figura 6. Triángulos oblicuángulos
A Ac c
C C
h hbb
B B
Ley de los senos
Esta ley se usa para resolver triángulos en los cuales sólo se conocen un lado y dos ángulos o dos lados y el ángulo opuesto a uno de ellos. Para un triángulo ABC con lados , b, c, y ángulos opuestos , , respectivamente, los lados de un triángulo son proporcionales a los senos de los ángulos opuestos (Zill, 2012a).
sin sin b
sin c
En el caso de un triángulo acutángulo ABC, con lados , b, c,y ángulos opuestos , , respectivamente (Figura 7), si es el punto donde la altura desde el vértice A cruza al lado BC, se observa que los triángulos
y son triángulos rectángulos. Para este caso hacemos uso de la ley de los cosenos.
Figura 7. Triángulo acutángulo
B P
A
hc b
c cos b cos C
Ley de los cosenos
Cuando en un triángulo se conocen tres lados o dos lados y el ángulo incluido se usa la ley de los cose-nos. Esta ley señala que, en todo triángulo, el cuadrado de un lado cualquiera es igual a la suma de los cuadrados de los otros dos lados, menos el doble producto de dichos lados, por el coseno del ángulo que forman.
Se expresa mediante las siguientes igualdades (Zill, 2012a):
2= b2+ c2-2 bc cos cos b2= 2+ c2-2 c cos cos c2= 2+ b2-2 c cos cos
12
ESTÁTICA
1.6. Solución de casos prácticos utilizando triángulos oblicuángulos
Ejemplo. Aplicación de la ley de los senos.
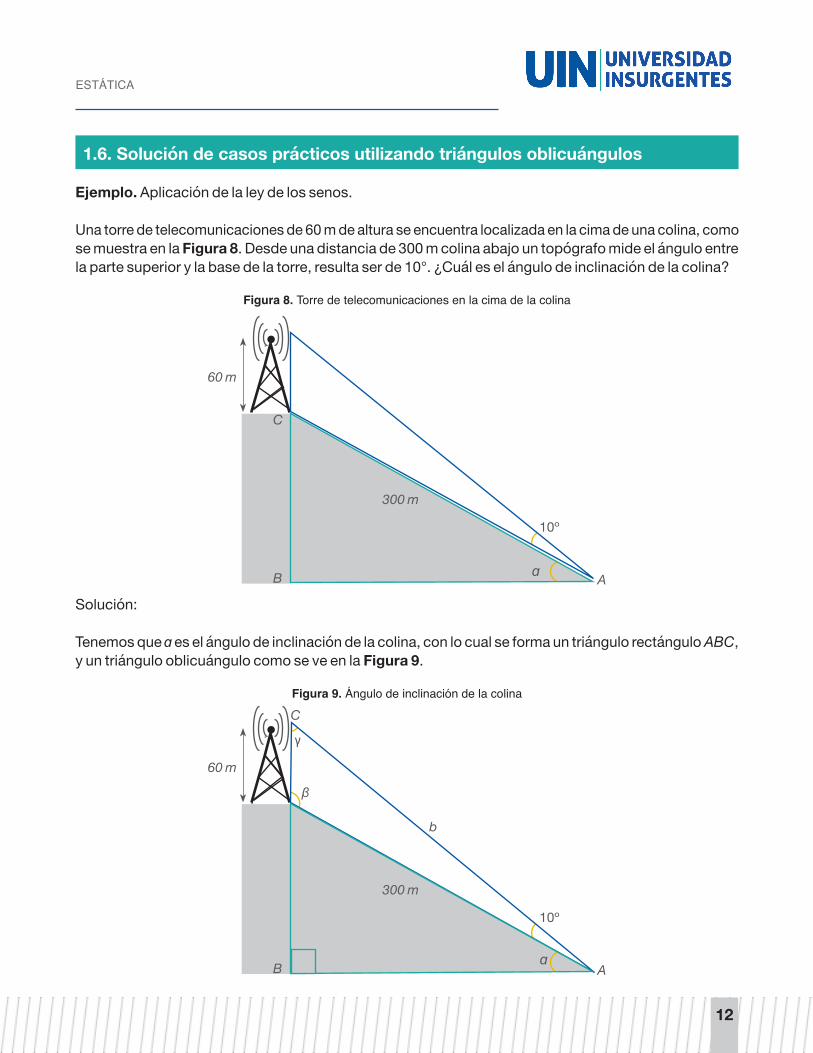
Una torre de telecomunicaciones de 60 m de altura se encuentra localizada en la cima de una colina, como se muestra en la Figura 8. Desde una distancia de 300 m colina abajo un topógrafo mide el ángulo entre la parte superior y la base de la torre, resulta ser de 10°. ¿Cuál es el ángulo de inclinación de la colina?
Figura 8. Torre de telecomunicaciones en la cima de la colina
60 m
A
10º
B
300 m
C
Solución:
Tenemos que es el ángulo de inclinación de la colina, con lo cual se forma un triángulo rectángulo ABC, y un triángulo oblicuángulo como se ve en la Figura 9.
Figura 9. Ángulo de inclinación de la colina
60 m
A
10º
B
300 m
C
b
13
ESTÁTICA
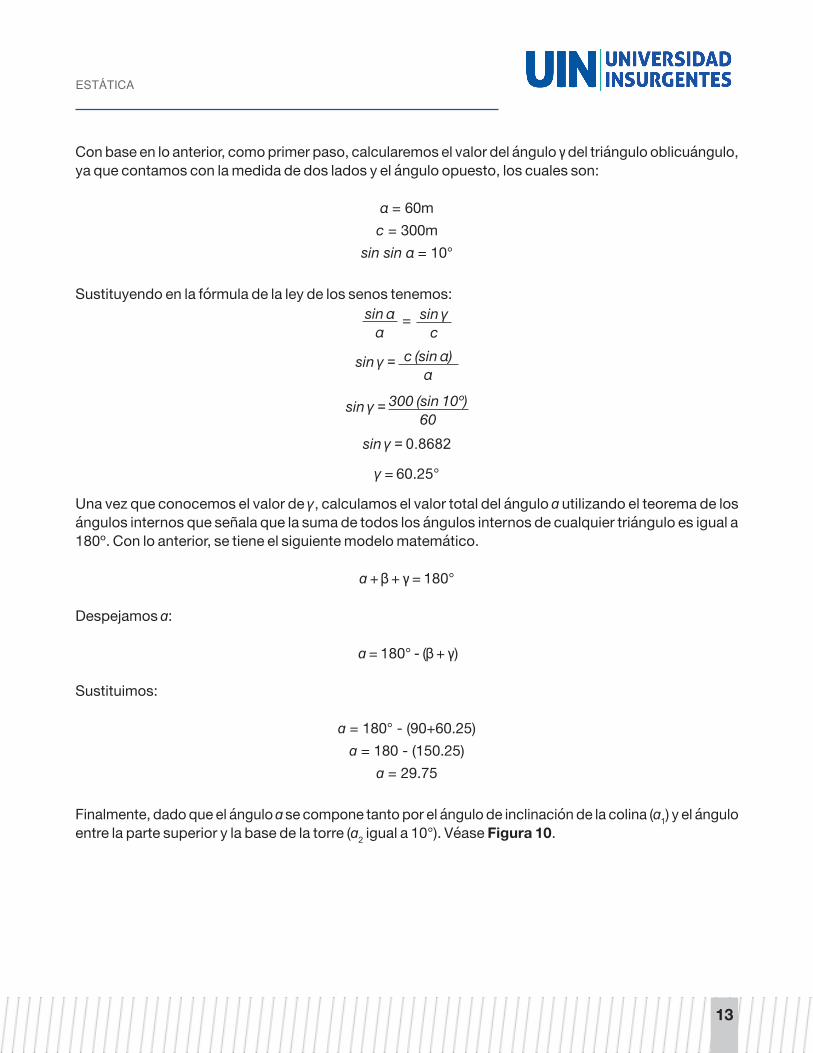
Con base en lo anterior, como primer paso, calcularemos el valor del ángulo del triángulo oblicuángulo, ya que contamos con la medida de dos lados y el ángulo opuesto, los cuales son:
= 60mc = 300m
sin sin = 10°
Sustituyendo en la fórmula de la ley de los senos tenemos:sin sin
cc (sin )sin =
300 (sin 10º)60
sin =
sin = 0.8682
= 60.25°
Una vez que conocemos el valor de , calculamos el valor total del ángulo utilizando el teorema de los ángulos internos que señala que la suma de todos los ángulos internos de cualquier triángulo es igual a 180º. Con lo anterior, se tiene el siguiente modelo matemático.
+ + = 180°
Despejamos :
= 180° - ( + )
Sustituimos:
= 180° - (90+60.25) = 180 - (150.25)
= 29.75
Finalmente, dado que el ángulo se compone tanto por el ángulo de inclinación de la colina ( 1) y el ángulo entre la parte superior y la base de la torre ( 2 igual a 10°). Véase Figura 10.

14
ESTÁTICA
Figura 10. Ángulo T= 1+ 2
60 m
A
10º
B
300 m
C
b
1
2
Para obtener el valor de la inclinación de la colina ( 1), restamos al valor total ( T) el ángulo de la torre ( 2) y obtenemos que:
1 = T - 2
1 = 29.75º - 10ºel ángulo de inclinación de la colina 1 = 19.75°
Ejemplo. Aplicación de la ley de los cosenos.
Un barco navega 45 millas hacia el este, después ajusta su curso hacia el noreste, como se muestra en la Figura 11. Luego de navegar 70 millas en esa dirección, el barco se encuentra a 110 millas de su punto de salida. ¿Cuál es el rumbo del punto B al C?
Figura 11. Ubicación de un barco
A B
Cb
c

15
ESTÁTICA
Solución
Se tiene:
= 70 millasb = 110 millasc = 45 millas
Empleando la siguiente ecuación de la ley de los cosenos:
b2 = + c2 - 2 c cos
Entonces: b2 - 2 - c 2
-2 ccos B =
(100)2 - (70)2 - (45)2-140(45)
cos B =
12100 - 4900 - 2045-140(45)
cos B =
5175-6300
cos B =
cos B ≈-0.8214B≈(-0.8214) ≈145.23°
Por lo tanto, el rumbo medido hacia el norte del punto B al punto C es 145.23°-90°= 55.23°, o N 55.23°.
Como puedes visualizar, el uso de la trigonometría es muy importante en el campo laboral de la arqui-tectura, ya que permite determinar lados, ángulos y áreas. El uso de la trigonometría en tus estudios, te permitirá ser capaz de solucionar problemáticas aplicando los conceptos básicos de esta rama de las matemáticas y el uso de herramientas como teoremas, leyes y funciones trigonométricas.

16
ESTÁTICA
2. Fundamentos de estática
La estática es la rama de la mecánica que analiza las cargas (fuerza y momento) y el estudio de las leyes que regulan el equilibrio estático de fuerzas.
2.1. Conceptos
Cantidades básicas
Espacio, masa y tiempo son magnitudes absolutas. Esto significa que son independientes entre sí y no pueden expresarse en función de las otras o de manera más sencilla. Por otra parte, la fuerza es una medida que no es independiente de las otras tres (Hibbeler, 2010).
� Espacio. Es la región geométrica ocupada por un cuerpo cuya posición se especifica mediante medidas de longitud y angulares, respecto de un sistema de coordenadas.
� Masa. Es una medición de la cantidad de materia que contiene un cuerpo y que representa la resistencia a cualquier cambio de velocidad.
� Tiempo. Es la medida de una serie de eventos que se requiere considerar de manera simultánea con otra variable, como la posición o velocidad. En los problemas de estática, el tiempo no se considera para el análisis; en cambio, para la dinámica constituye una magnitud básica.
� Fuerza. Es la acción que actúa sobre los cuerpos y provoca su movimiento o reposo. Puede ejercerse por contacto real o a distancia. La fuerza es una magnitud vectorial, la cual se representa con un vector.
Modelos básicos
Los modelos o idealizaciones son utilizados en mecánica, con el fin de simplificar la aplicación de la teoría (Hibbeler, 2010).
� Partícula. Es un cuerpo cuyas dimensiones se aproximan a cero. No tiene dimensiones, pero sí tiene masa.
� Cuerpo rígido. Puede considerarse como una combinación de un gran número de partículas donde todas permanecen a una distancia fija entre sí, tanto antes como después de la aplicación de una carga. Es decir, es un objeto cuyas deformaciones pueden despreciarse en la situación bajo estudio.
� Fuerza concentrada. Esto ocurre cuando el área sobre la que se aplica una fuerza de contacto es tan pequeña que se puede aproximar por un punto. Una fuerza concentrada es la representación del efecto de una carga que se supone actúa en cierto punto de un cuerpo.

17
ESTÁTICA
Leyes de Newton del movimiento
Entre los conceptos de mayor importancia están las leyes de Newton, que se relacionan con las fuerzas (Riley, 1996):
� Primera ley de Newton. En ausencia de fuerzas exteriores, una partícula que esté en reposo o moviéndose con velocidad constante, seguirá en reposo o moviéndose con velocidad constante en línea recta.
Figura 12. Primera ley de Newton
F2
v
F1
F3
Adaptada de Hibbeler (2010).
� Segunda ley de Newton. Si sobre un punto material se ejerce una fuerza exterior, dicho punto se acelerará en la dirección y sentido de la fuerza y el módulo de la aceleración será directamente proporcional a la fuerza e inversamente proporcional a la masa del punto.
Figura 13. Segunda ley de Newton
F
F = m
Movimiento acelerado
Adaptada de Hibbeler (2010).
� Tercera ley de Newton. A toda acción corresponde una reacción igual, de sentido contrario; es decir, las acciones que se ejercen dos cuerpos, uno sobre otro, son siempre iguales y directamente opuestas.
Figura 14. Tercera ley de Newton
F F
A B
fuerza de A sobre B
fuerza de B sobre A
Acción - reacción
Adaptada de Hibbeler (2010).

18
ESTÁTICA
� Ley de gravitación universal. La fuerza gravitatoria entre dos de masas m1 y m2 que están separadas por la distancia r es:
Figura 15. Ley de la gravitación universal
F
F
m1
m2
r
Adaptada de Bedford y Fowler (2008).
Donde F = G m1 m2
r2
F = fuerza de gravitación entre las dos partículas.
G =constante universal de gravitación (G = 6.67 × 10-11 Nm2/kg2) (en unidades del Sistema Internacional [si])
m1, m2 = masa de cada una de las partículas
r = distancia entre las dos partículas
Peso. Se llama peso a la atracción gravitatoria que ejerce la tierra sobre un cuerpo. Esta fuerza existe si el cuerpo está en reposo o movimiento. Se expresa en newtons según el sistema si. A partir de la ley de la atracción gravitacional se desarrolla una expresión aproximada para encontrar el peso W de una par-tícula de masa m1 = m. Si se supone que la tierra es una esfera que no gira, tiene una densidad constante y una masa m2 = MT, y si r es la distancia entre el centro de la tierra y la partícula, se tiene (Hibbeler, 2010):
W = GmMT
r2
Si g = GMT
r2
Al sustituir los valores de G, masa y radio ecuatorial de la tierra g = 9.8 m
s2 , que corresponde a la aceleración de la gravedad que se utiliza para obtener el peso de un cuerpo (W), entonces:
W = mg

19
ESTÁTICA
2.2. Cantidades escalares y vectoriales
Las cantidades físicas pueden medirse, ya sea como escalares o vectoriales.
� Cantidad escalar. Es cualquier cantidad física positiva o negativa que se especifica por completo por su magnitud. Tiempo, volumen, masa y temperatura son algunos ejemplos de cantidades escalares.
� Cantidad vectorial. Es cualquier cantidad física que tiene asociada una magnitud, una dirección y un sentido. En estática, algunas cantidades vectoriales son: fuerza, posición y momento.
2.3 Características de una fuerza
La fuerza es una magnitud vectorial, puesto que su efecto depende de la dirección y sentido de la ac-ción tanto de su intensidad. Para la descripción completa de una fuerza se debe conocer su magnitud, dirección y sentido, y punto de aplicación (Figura 16).
Figura 16. Características de una fuerza
Punto de aplicación
Línea de acción
SentidoMódulo
Dirección
� Magnitud o módulo. Es la intensidad de una fuerza. Las unidades en que se expresa el módulo pueden ser: kilogramos, toneladas, libras, newtons, dina, poundal, gramos.
� Dirección o línea de acción. Es la recta en la que está situado el vector. Representa la dirección en la que se manifiesta la magnitud vectorial.
� Sentido. Indica la orientación del vector dentro de la línea de acción y queda indicado por la punta de la flecha.
� Punto de aplicación. Es el punto situado dentro de la línea de acción donde actúa el vector.

20
ESTÁTICA
2.4. Representación vectorial de una fuerza
Los vectores son modelos matemáticos utilizados para expresar y representar magnitudes vectoriales. Una fuerza puede representarse como un vector en virtud de sus características. La nomenclatura que se utiliza cuando se trata de un vector, se expresa con los símbolos: F o F y el módulo se denota como F. Según la naturaleza de la magnitud vectorial que representen pueden ser:
� Vectores libres. Pueden trasladarse paralelamente a sí mismos sin que varíe su efecto; su punto de aplicación puede moverse a cualquier lugar del espacio, siempre que se mantenga la dirección paralela. Ejemplo de este tipo de vector es el de aceleración de la gravedad g.
� Vectores deslizantes. Su punto de aplicación puede desplazarse a lo largo de su línea de acción sin que varíe su efecto. Una fuerza aplicada sobre un cuerpo rígido es un ejemplo de estos vectores.
� Vectores fijos. Son aquellos que para su determinación debe de conocerse el punto de aplicación donde actúan y no puede cambiarse esta posición sin que se modifique su efecto. La velocidad de un objeto puntual y la fuerza aplicada sobre un objeto deformable son ejemplos de vectores fijos.
Gráficamente, los vectores se representan mediante flechas como se muestra en la Figura 17. Su direc-ción indica la dirección del vector, y su longitud debe ser proporcional al módulo. Por ello, normalmente se establece una escala de representación.
El ángulo entre el vector y un eje fijo define la dirección de su línea de acción, es la recta en la que se sitúa el vector. Puede ser horizontal, vertical, inclinada, etcétera. El punto de aplicación corresponde al punto, también dentro de la línea de acción, donde actúa el vector. El sentido de dirección del vector está indicado por la punta de la flecha. Es importante indicar el sentido del vector porque dos vectores, como los que se muestran en la Figura 17, que tienen la misma magnitud y línea de acción pero diferente sen-tido, tendrán efectos opuestos sobre una partícula. En este caso, se llaman vectores iguales y opuestos.
Figura 17. Representación gráfica de un vector
25 N
A
25 N
A
2.5 Principios de transmisibilidad de una fuerza
La transmisibilidad se basa en un principio que consta de la sustitución de una fuerza por otra de igual dirección, sentido y obviamente magnitud para no perder el equilibrio; considerando la misma línea de acción sobre el cuerpo.
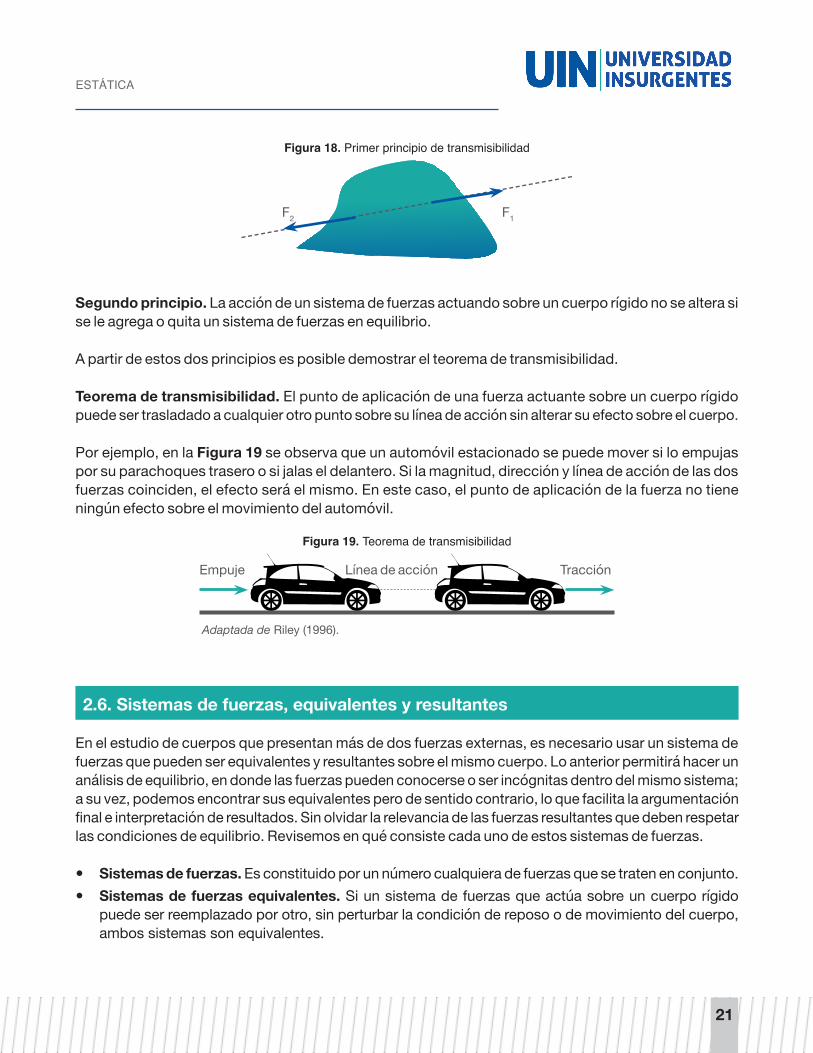
Primer principio. Un cuerpo rígido sometido a la acción de dos fuerzas sólo puede estar en equilibrio si las dos fuerzas están aplicadas en la misma línea de acción, tienen sentidos opuestos e igual magnitud. En la Figura 18 se ilustra este principio, el cual define el sistema de fuerzas en equilibrio más simple.
21
ESTÁTICA
Figura 18. Primer principio de transmisibilidad
F2 F1
Segundo principio. La acción de un sistema de fuerzas actuando sobre un cuerpo rígido no se altera si se le agrega o quita un sistema de fuerzas en equilibrio.
A partir de estos dos principios es posible demostrar el teorema de transmisibilidad.
Teorema de transmisibilidad. El punto de aplicación de una fuerza actuante sobre un cuerpo rígido puede ser trasladado a cualquier otro punto sobre su línea de acción sin alterar su efecto sobre el cuerpo.
Por ejemplo, en la Figura 19 se observa que un automóvil estacionado se puede mover si lo empujas por su parachoques trasero o si jalas el delantero. Si la magnitud, dirección y línea de acción de las dos fuerzas coinciden, el efecto será el mismo. En este caso, el punto de aplicación de la fuerza no tiene ningún efecto sobre el movimiento del automóvil.
Figura 19. Teorema de transmisibilidad
Empuje TracciónLínea de acción
Adaptada de Riley (1996).
2.6. Sistemas de fuerzas, equivalentes y resultantes
En el estudio de cuerpos que presentan más de dos fuerzas externas, es necesario usar un sistema de fuerzas que pueden ser equivalentes y resultantes sobre el mismo cuerpo. Lo anterior permitirá hacer un análisis de equilibrio, en donde las fuerzas pueden conocerse o ser incógnitas dentro del mismo sistema; a su vez, podemos encontrar sus equivalentes pero de sentido contrario, lo que facilita la argumentación final e interpretación de resultados. Sin olvidar la relevancia de las fuerzas resultantes que deben respetar las condiciones de equilibrio. Revisemos en qué consiste cada uno de estos sistemas de fuerzas.
� Sistemas de fuerzas. Es constituido por un número cualquiera de fuerzas que se traten en conjunto. � Sistemas de fuerzas equivalentes. Si un sistema de fuerzas que actúa sobre un cuerpo rígido
puede ser reemplazado por otro, sin perturbar la condición de reposo o de movimiento del cuerpo, ambos sistemas son equivalentes.

22
ESTÁTICA
� Resultante. Si un sistema de fuerzas es equivalente a un sistema constituido por una única fuerza, se le llama resultante del sistema. Es decir, la resultante de un sistema de fuerzas es una única fuerza cuya acción sobre el cuerpo es la misma que la de todo el sistema.
2.7. Ley del paralelogramo
La ley del paralelogramo constituye el tercer principio fundamental de la estática. Hace referencia al estu-dio de la fuerza resultante que se origina de dos fuerzas vectoriales, es decir que se requieren mínimo de dos fuerzas; en donde cada fuerza es independiente, que de manera gráfica parten de un mismo punto, regularmente es la coordenada (0,0) en un plano cartesiano y una vez trazadas la fuerzas se obtiene un paralelogramo; el cual al trazar del origen a la contra esquina del mismo se genera una fuerza vectorial con mayor magnitud a las fuerza que lo conforman. Dicha ley señala que:
� Ley del paralelogramo. Dos fuerzas aplicadas sobre un mismo punto de un cuerpo rígido tienen como resultante una fuerza aplicada en el mismo punto y representada por la diagonal de un paralelogramo que tiene por lados los vectores representativos de las fuerzas. (Hibbeler, 2010, s. p.).
En la Figura 20 se muestra cómo aplicando la ley del paralelogramo se obtiene la fuerza resultante R, correspondiente a las fuerzas F1 y F2 que actúan sobre un cuerpo rígido aplicadas en el punto 0.
Figura 20. Fuerza resultante aplicando la ley del paralelogramo
F1 F1 R
F2 F2
Ahora que tienes los conceptos básicos de la estática, como fuerza, leyes, sentido, método de resolución y la manera en que se pueden presentar, puedes darte cuenta que todo cuerpo, para que se encuentre en equilibrio, debe respetar diferentes principios que permitan condiciones importantes que requieren de un análisis matemático para argumentar la parte de la física, en este caso la estática. Recuerda el concepto de fuerza, ya que es un elemento esencial y que estarás usando en los posteriores bloques.

23
REFERENCIAS
Baldor, A., Santaló, M. y Suardíaz, P. (2006). Geometría plana y del espacio: con una introducción a la trigonometría. México: Grupo Patria Cultural.
Bedford, A. y Fowler, W. (2008). Mecánica para ingeniería. Estática. México: Pearson Education.
Hibbeler, R. (2010). Ingeniería mecánica. Estática. México: Pearson.
Riley, W. (1996). Ingeniería mecánica. Estática. Barcelona: Reverté.
Zill, D. (2012a). Precálculo con avances de cálculo. México: McGraw-Hill.
Zill, D. y Dewar, J. (2012b). Álgebra, trigonometría y geometría analítica. México: McGraw-Hill.