Y DESARROLLO TECNOLÓGICO cenídef · 2014-03-10 · SISTEMA NACIONAL DE INSTITUTOS TECNOL6GICOS...
131
S.E.P S.E.1.t. D.G.1.t CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO cenídef PRUEBA EXPERIMENTAL DE DETECCIÓN DE INCISIONES EN VIGAS DE SECCIÓN RECTANGULAR SOMETIDAS A VIBRACIÓN FORZADA T E S I S PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN I NGEN I ERíA MECÁNICA *s* P R E S E N T A f ING. JORGE BEDOLLA HERNÁNDEZ <I DIRECTOR DE TESIS: v DR. DARIUSZ SZWEDOWICZ WASIK ., C U ERNAVACA, MOR. ENERO 1999 g $9- 08 10 SISTEMA NACIONAL DE INSTITUTOS TECNOLÓGICOS Centro Nacional de Investigación y Desarrollo Tecnológico ACADEMIA DE LA MAESTRIA EN CIENCIAS EN INGENIERIA MECANICA d- c-' Cuernavaca, Mor., a 16 de diciembre de 1998. Dr. Juan Manuel Ricaño Castillo Director del Cenidet D - ~ a - s b -
Transcript of Y DESARROLLO TECNOLÓGICO cenídef · 2014-03-10 · SISTEMA NACIONAL DE INSTITUTOS TECNOL6GICOS...

S.E.P S.E.1.t. D.G.1.t
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO
cenídef PRUEBA EXPERIMENTAL DE DETECCIÓN DE
INCISIONES EN VIGAS DE SECCIÓN RECTANGULAR SOMETIDAS A VIBRACIÓN
FORZADA
T E S I S PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN I NGEN I ERíA MECÁNICA
*s* P R E S E N T A f ING. JORGE BEDOLLA HERNÁNDEZ <I
DIRECTOR DE TESIS: v DR. DARIUSZ SZWEDOWICZ WASIK
.,
C U ERNAVACA, MOR. ENERO 1999
g $ 9 - 0 8 1 0
SISTEMA NACIONAL DE INSTITUTOS TECNOLÓGICOS
Centro Nacional de Investigación y Desarrollo Tecnológico
ACADEMIA DE LA MAESTRIA EN CIENCIAS EN INGENIERIA MECANICA d- c-'
Cuernavaca, Mor., a 16 de diciembre de 1998.
Dr. Juan Manuel Ricaño Castillo Director del Cenidet D - ~ a - s b -
. SISTEMA NACIONAL DE INSTITUTOS TECNOL6GICOS
Centro Nacional de Investigación y Desarrollo Tecnológico
Cuernavaca, Mor., a 15 de diciembre de 1998.
Ing. Jorge Bedolla Hernandez Candidato al Grado de Maestro en Ciencias en Ingeniería Mecánica P R E S E N T E
Después de haber sometido a revisión su trabajo de tesis titulada:
"Prueba Experimental de Detección de Incisiones en Vigas de Sección Rectangular Sometidas a Vibración Forzada"
Y habiendo cumplido con todas las indicaciones que el jurado revisor de tesis hizo, se le comunica que se le concede la autorización para que se proceda a la impresión de la misma como requisito para la obtención del grado.
Sin otro particular, quedo de usted
A t e n t a m e n t e
D. G. I. T. 5 % - e .a.=+G&u NACIuNAL DE 1-m
TECNOL~OICO DR. DARIUSZ SZWEDOWI&&@&$ W A W C A Jefe del Deoartamento de Ingeniería
Mecinica del CENlDE?
A 3 i o d por co e marme de dendicioned en to d o e o3 adpectod de mi
UL .d a.
-.A !ai
l i c ie ron podL e t o d o e3 t o, mi ma d mi padw ¿‘Lad L?edo!!a /3é,ez.
perdonad que me Lan dado todo eeapoyo d e e mun d o I, ode 1 ma A e r n á n d e z S a n c L z y
Agradecimientos
,-
A mis hermanos Marcos, Sonia, Liz y Felicitas por todo el apoyo que me han dado.
A mi asesor, Dr. Dariusz Szwedowicz Wasik por sus asesona y el tiempo dedicado a esta tesis.
A mis revisores, Dr. José María Rodriguez L., M.C. Claudia Cortés G. Y M.C. Jorge Colin O. Por sus acertadas observaciones y recomendaciones para mejorar este trabajo.
A todos mis compañeros de generación y compañeros de escuela: Ovidio, Medina, Xamán, Boga, Efrain, José Luis, Ruben, Paco, Calixto, Eladio, Sunza, Ivan, Claudia Colin, Wing, Jaime, Ana Bell, Karla, Isable, Veronica, Cecilia, Angulo, Pescado, la banda reptilio, Leonel, Manuel y demás compañeros de institución que en este momento no recuerdo.
Al Sr. Gerard0 Pluma S. y familia a quien siento puedo llamar amigo; gracias por toda la confianza y paciencia que han tenido conmigo a lo largo de estos más de dos años ... y los que faltan.
A mis amigos de siempre y sus familias Edgar Pérez T. Rodolfo Carro L. Fabrizzio Murioz R. Eric Vázquez L.
A una gran amiga Elizabeth Vázquez O. Porque sin importar lo que tengas que hacer siempre que lo he necesitado, siempre has tenido tiempo para mí.
Al Consejo Nacional de Ciencia y Tecnología (CONACyT) y a al Secretaria de Educación Pública (SEP) por el apoyo económico otorgado para la realización de esta tesis.
Al cenidet por permitirme cristalizar uno de tantos sueños.
A mis “agüelos” y todas personas que han tenido y tienen confianza en mi, espero nunca defraudarlos.
Y muy especialmente quiero agradecer a Laura Pluma Sandoval (Babyc) por ser una parte fundamental e irremplazable en esta experiencia y por ... Bueno tú mejor que nadie sabes porque.

Tabla de contenido
Lista de figuras ......................................................................................... 111 Lista de tablas ........................................................................................... V Lista de fotografías ................................................................................... I V
1 Introduccion .............................................................................................. VI 1. Estado del arte I 1-1
1.2 Análisis de vigas con fractura. .............................................. 1-2
. I
...................................................................................... 1 .I Análisis de vigas sujetas a vibración forzada. .............................. 1-2
2-1 2-2
2. Planteamiento del problema y teoría Básica ..................................... 2.1 Planeación del experimento ................................................................ 2.20bjetivos ............................................ 2.3Alcance y limitaciones ....................... 2.4Análisis de vibraciones ...............................
. .
2.4.1 Conceptos básicos de mediciones dinámicas ................ 2-6 2.5 Metodología.. .. ...............................
3.1 Equipo de vibraciones ............................... 3.2 Banco de sujeción ................................................
3 Análisis del banco experimental ........................................................ 3-1
3.3Diseño y rediseño lementario para el experiment 3.3.1 Elementos de sujeción para el empotramiento ........................ 3-10 3.3.2 Pruebas preliminares al empotramient ........................ 2-10 3.3.3 Banco del excitador ............................. ............................... 3-12 3.3.4 Unión viga excitador ....... ...................................
3.3.4.1 Unión tornillo-alambre-tornillo ................................ 3.4Equipo utilizado y distribución de elementos ...................
4.1 Las vig ................................................ ., 4 Implementacion de las pruebas ........................................................... 3-1
4.1.1 Di iones y propiedades físicas d 4.1.2 Colocación de las probetas en el ban 4.1.3 Sistema de medición para excitación por impulso. .............. 4-4
4.2 Frecuencias naturales de las vigas ........................... ............... 4-5
4.2.2 Métod6 experimental. .............................
4.3.1 Unión a la mesa vibratoria .......................... .................... 4.3.2 Unión a la viga .............................
4.4.1 Sistema de medición ........................ 4.4.2 Fuerza de excitación .....
4.2.1 Método analítico .....................................................................
4.3Unión de la viga y el excit
4.4Sistema de medición y control para pruebas de vibración forzada ..... 4-14 .......................... . 4-14
........................... ................. 4-16 4.5 Puntos de medición ........... ....................... :.... ........ 4-17 4.6 Posición de la incisión .......... .................................. ................ 4-20 ., 5 Presentacion de resultados ................................................................ 5-1
5.1 Presentación de resultados .......................................... 5.1 .I Análisis cualitativo ........................... ............................... 5.1.2 Análisis cuantitativo ........................................................................ 5-16
5.2.1 Viga 1x1000 ........................... ......... ................................. 5-21 5.2.2 Viga 1x700 .................................................. 5.2.3 Viga 1x800 ........................................................... 5.2.4 Viga 1x900 ....................................................................... 5.2.5 Viga 2x1000 ............................................................................ 5.2.6 Viga 2x800 .................................................................................... 5-24
5.2Compendio de resultados ........ ..........................................
5.2.7 Viga 2x900.. ......................... 5-24 5.2.8 Viga 3x1000 ..... ........................ ............................... 5-25 5.2.9 Viga 3x800 ........................... 5.2.10Viga 3x900 ................................ 5.2.1 1 Viga 4x1000 ........... ........................ 5-26 5.2.1 2 Viga 4x700 ..................................................................... 1.. ........... 5.2.13 Viga 4x800 ............................ .............. 5.2.14Viga 4x900 ..........................
5-26
6 Conclusiones ................................ 6.1 Aportaciones al fenómeno estudiado ................. ............................ 6-2 6.2Aportaciones al cenidet ...................................... ............................ 6-4 6.3Aplicaciones. .. .................................................................. 6 4 6.4 Recomendaciones ...................................... . 5-4
Bi bliografia Apéndice A Apéndice B Apéndice C Apéndice D Apéndice E
I1
Lista de figuras
Figura 1 .I Diagrama esquemático de la viga ..................
Figura 2.3 Diagrama a bloques de la metodología piant Figura 3.1 Sección transversal amplificada de un Piezo Figura 3.2 Vista esquemática del motor-excitador de cd ............. Figura 3.3 Vista general del excitador mecánico .......................................... 3-5 Figura 3.4 Sistema típico V400 con amplificador PA500L ........... Figura 3.5 Empotramiento de las probetas ......................................... Figura 3.6 Esquema de la viga empleada para pruebas en el nu Figura 3.7 Banco del excitador ....................................... ................. 3-13 Figura 3.8 Unión viga-excitador .......... ...................... ................. 3-14 Figura 3.9 Diagrama de fuerza vs deformación del arreglo tornillo-alambre-
Figura 3.10 Diagrama de fuerza vs deformación del extensor completo ..... 3-17 Figura 2.1 1 Representación esquemática del sistema para realizar las pruebas
Figura 4.1 Representación esquemática y nomenclatura de la viga ........... 4-2 Figura 4.2 Longitud a considerar para las pruebas ...................................... 4-3 Figura 4.3 Diagrama a bloques del sistema de medición para excitación por
......... 4-4 4-7
Figura 2.1 Ejemplos de sistemas vibrantes simples ........................ ......... Figura 2.2 Condiciones en los extremos de la viga .................. 2-6
.................................................................................... tornillo 3-16
3-1 8
Figura 4.4 Solución gráfica del primer valor de “z” ............ Figura 4.5 Posición de acelerómetros en la o
Figura 4.6 Valores experimentales de las frecuencias obtenidas mediante
Figura 4.7 Valores experimentales de las frecuencias obtenidas mediante
experimentales ........................................... ~ ............................... 4-9
Frequency response ................................................................. 4-1 O
Power Spectrum .................................................................. 4-1 O Figura 4.8 Unión a la mesa vibratoria ........................................................ Figura 4.9 Unión a la viga
4-12 4-13
tación., . , , . . , , , . _. _.. , . 4-14 Figura 4.1 1 Sistema de medic
.............................................. 4.15 4-17
......... 4-20
.......................................................................... Figura 4.10 Distribución física de los elementos mecánicos para la experimen-
........................... ............................... y control para pruebas de vibración forzada
.......................... ........ Figura 4.12 Posición de los acelerómetros y aplicación de la fuerza
Figura 4.13 Ubicación de la fractura en las Vigas ....................... Figura 5.1 Comparación de las tres curvas de frecuencias obtenidas para la
Figura 5.2 Acercamientos de la figura 4.1 ....................... ........................ 5-4 Figura 5.3 Fama de las señales de fuerza de excitació oltaje y aceleración
Figura 5.4 Forma de las setiales de fuerza de excitación, voltaje y aceleración
Viga 2x900 ...................................................................
del acelerómetro 1 ................................................ ............. 5-5
del acelerómetro 1 para el segundo modo de excitación de la viga 2x900 ..................... ...................................................... 5-6
5-6
5-8
5-8
5-9
5-9
5-1 O
5-12
Figura 5.5 forma de las señal fuerza, voltaje y aceleración ................
primer modo de vibración de la viga 1x900 ............................... Figura 5.6 Forma de las señales obtenidas de los acelerómetros para el
Figura 5.7 Forma de las señales obtenidas de los acelerómetros para el segundo modo de vibración de la viga 1x900 ...........................
Figura 5.8 Forma de las señales obtenidas de los acelerómetros para el tercer y cuarto modo de vibración de la viga 1x900 .................
Figura 5.9 Forma de las señales obtenidas de los acelerómetros para las dos diferentes configuraciones del modo 5 .............................
Figura 5.10 Forma de las señales obtenidas de los acelerómetros para las
Figura 5 11 Comparación de los desplazamientos de la vig dos diferentes configuraciones del modo 6 .......
los primeros 6 modos de vibración ...................................... Figura 5.12 Representación de una señal seno ................................ 5-17
IV
Lista de tablas
Tabla 4.1 Dimensiones totales y propiedades de las vigas. Tabla 4.2 Longitud, designación y masa de las vigas a utili Tabla 4.3 Frecuencias [Hz] de los 6 primeros modos de la viga 1 para 4
Tabla 4.4 Frecuencia [Hz] de los 6 primeros modos de la viga 2 para 3
Tabla 4.5 Frecuencia [Hz] de los 6 primeros modos de la viga 3 para 3
Tabla 5.6 Frecuencia [Hz] de los 6 primeros modos de la viga 4 para 4
Tabla 4.7 Posición de los acelerórnetros en la viga para cada longitud y modo
... .............. 4-2
................ . 4-3
longitudes en voladizo ................... 4-7
longitudes en voladizo ............. ......................................... 4-a
longitudes en voladizo ............................................. 4-a
longitudes en voladizo .................................................................... 4-8
. . . , . , , . . , , . . . . . . . . . . . . . . . . . . . . . . . . . , . . . . . . . . . . . . . . . . . . . . . . . . . ..... ción y profundidad adimensional de la fractura
Tabla 5.1 Comparación de frecuencias [Hz] correspondientes a los 6
Tabla 5.2 Valores de la señal de aceleración y puntos de medición para la
Tabla 5.3 Valores porcentuales de la diferencia de los desplazamientos de
primeros modos de la viga 2x100 5-16
Viga 2x900 sin fractura ... ........................................................... 5-17
................. ............. ... .... ...
la viga sin incisión y los de la viga con incisión 5-19
Lista de fotografías
Fotografía 3.1 Unión viga excitador en la posición de trabajo ._..._...__.._....... Fotografía 3.2 Banco experimental ................................................................
3-1 5 3-1 9
V

Introducción
Un problema en los elementos mecánicos, es la presencia de grietas que existen o se iniciaron durante el tiempo de trabajo ylo la manufactura; a causa de fatiga en el material, elementos en movimiento en los que existe un cambio de sección brusco, uniones soldadas o cerca de estas uniones y condiciones de operación diferentes para el trabajo que fueron diseñados. Por esto, es necesario realizar investigaciones con el fin obtener la información necesaria que permita detectar y prevenir este tipo de problemas, antes de que representen una condición peligrosa o, en el peor de los casos, ser la causa de accidentes.
Las investigaciones relacionadas con el problema mencionado pueden estar orientadas a la etapa preventiva del mantenimiento industrial, a la etapa conceptual o de diseño de máquinas o sus elementos componentes, teniendo como base los cálculos y ecuaciones tradicionales.
Ejemplos de ecuaciones tradicionales se encuentran: en la base de la teoría de falla para cargas constantes [I]. En la resistencia por durabilidad conjuntamente. con los factores que la afectan, como pueden ser: dimensiones, acabado de la superficie, propiedades no uniformes en el material, tensiones residuales, corrosión y factores ambientales, nitruración y tipos de tensión, etc. [2].
Estas investigaciones pueden tener un enfoque numérico, auxiliándose de modernas herramientas (por ejemplo: modelación numérica empleando el método de elemento finito), las cuales permiten analizar estructuras compuestas de varios elementos o muy complejas; a las cuales se les pueden adicionar diferentes condiciones de frontera, tipos de carga y diversos materiales (isotrópico, anisotrópico, mixto o compuesto).
Seguramente un proceso de investigación como el descrito en los párrafos anteriores, realizado en la etapa de análisis conceptual, puede prevenir muchas deficiencias en el diseño y la construcción final. Pero es necesario que los resultados obtenidos mediante paquetes computacionales puedan ser verificados de manera experimental.
v1
Por tal razón, se preparan .los experimentos sobre toda la máquina, mecanismo o sus elementos (por ejemplo pruebas de fatiga) en condiciones normales de operación o en condiciones extremas que se pudieran presentar en su tiempo de trabajo.
Un aspecto importante a considerar en la prevención de fallas y los consecuentes accidentes es el monitoreo periódico del comportamiento de los sistemas mecánicos (o subsistemas), por ejemplo los rodamientos que son elementos que se someten a un gran número de ciclos a lo largo de su vida útil.
El monitoreo puede llevarse a cabo de forma periódica, o en algunos casos de manera constante, donde la complejidad del sistema o precisión de las variaciones sean de gran interés (por ejemplo en plantas atómicas, aviones, etc., donde el monitoreo de determinados elementos debe ser constante en todo momento).
La información obtenida a partir de los monitoreos realizados a sistemas mecánicos permiten controlar el estado de desgaste de los elementos bajo observación, prevenir deficiencias entre uniones y poder evitar posibles fallas en estos (por ejemplo: la fractura de un álabe, el diente de un engrane, etc.).
Tener el conocimiento preciso del estado real de una máquina o una parte de ella en cualquier instante de operación, y de esta manera poder evitar su falla o daño, se convierte en un problema muy importante para un investigador, diseñador, o ingeniero de planta, en las correspondientes etapas en las que intervienen.
Por tal razón, este tipo de información aumenta su importancia a medida que aumenta la variedad de materiales, los diseños se hacen más ligeros y con mayor precisión tanto de dimensiones como de operación (como por ejemplo los robots o manipuladores), se intenta producir mas a un menor costo.
A causa de esto es necesario buscar nuevas formas de investigación, tanto en modelación teórica como experimental o mixta para la prevención de fallas.
El presente trabajo se establece un método experimental que permite conocer la existencia de la fractura, sin retirar al elemento del dispositivo o sistema del cual forma parte; Únicamente sometiéndolo a vibración forzada, o aprovechando la propia vibración a la que se encuentre sometido.
El desarrollo del presente trabajo se enfoca a las vibraciones mecánicas; usando éstas como herramienta para la detección de cambio en el comportamiento en un elemento o sistema dinámico, con el fin de establecer si éstas pueden proporcionar la información que permita precisar existencia, tamaño y localización de una fractura existente.
El trabajo aquí se presenta, consta de 6 capítulos, los cuales se encuentran divididos de la siguiente manera:
En el capítulo 1 se presenta el estudio del estado del' arte, donde se encuentran reunidas las observaciones y conclusiones de diversos autores relacionados con el problema de la fracturas en elementos mecánicos; y a partir de dicha información se empieza con la planeación del experimento.
En el capítulo 2 se presenta teoría básica relacionada con el estudio del fenómeno; además de que es en éste capítulo donde se propone la metodología a seguir para el experimento. El capítulo 3 presenta los elementos con los que se lleva a cabo la experimentación, as¡ como y diseño y acondicionamiento de ciertos
VI1
Introducción
elementos necesarios para completar las pruebas, y se presentan algunas pruebas preliminares.
El capítulo 4 se enfoca a la descripción de las pruebas realizadas, así como las decisiones y condiciones tomadas en cuenta para la conclusión de éstas. En el capítulo 5 se presenta en forma simplificada ejemplos de los resultados obtenidos de la experimentación y se realizan los comentarios para cada una de las diferentes probetas con las que se experimento.
Por ultimo en el capítulo 6 se presentan las conclusiones del trabajo y se enuncian las aportaciones que se obtuvieron de este, de igual manera se tratan algunas recomendaciones que puedan servir para la mejora de la metodología planteada.
Re fe re n c ¡as
[ I ]
[2]
SHIGLEY , J., Diseño en lnseniería Mecanica, cuarta edición en español, Mc Graw Hill, México 1990. MOl-r, r., Diseño de Elementos de Máquinas, segunda edición, Prentice Hall, México 1995.
VI11
Capítulo 1
Estado del arte.
En muchas actividades industriales y de investigación, resulta conveniente visualizar y abordar la solución de los .problemas en su forma más sencilla, para que a partir de esto se pueda ir extendiendo el campo de estudio hasta que ese problema pueda ser reproducido y resuelto en la forma que realmente ocurren en la práctica o en condiciones de operación de los dispositivos mecánicos.
Ese es precisame'nte el caso de esta aproximación experimental, en que solamente se trabajará con vigas de sección rectangular constante a lo largo de toda su longitud. Por supuesto, teniendo la idea de que esto sirva como base para intentar expandir los. experimentos a secciones no uniformes y con distintas condiciones de operación.
Basándose en lo explicado en los dos párrafos previos, se presenta a continuación el estado del arte, donde se muestran algunos estudios relacionados a vigas sometidas a vibración forzada y vigas con fracturas, en las cuales el análisis del estado de estas se trata de determinar a partir de la vibración forzada.
Los estudios aquí presentados sirvieron como base para la planeación del experimento, incluyendo las variables a considerar en las mediciones realizadas y su posterior análisis y conclusiones.
1-1
1 .I Análisis de vigas sujetas a vibración forzada
Se han realizado diversos estudios acerca de vigas de sección cuadrada constante; como ejemplo se tiene el estudio del estado del arte realizado por Cortes i l l . en donde se mencionan las formulaciones realizadas por algunos autores para Lite tipo de elementos.
Por ejemplificar algunas de las formulaciones que se mencionan en [I] se tiene el metodo del elemento finito (FEM por sus siglas en ingles Finite Element Method) de donde a partir de éste se puede describir con precisión el problema estático de una viga Timoshenko regular discreta con sus correspondientes condiciones de frontera.
En el estudio presentado por 111 también se plantea el análisis para la determinación de cargas criticas de columnas angostas en cantiliver de sección variable o constante (el análisis para este tipo de elementos puede considerarse como una extensión del estudio experimental desarrollado en el presente trabajo de investigación), para las cuales el amortiguamiento no es tomado en cuenta.
De los resultados mencionados.por los ,autores que aparecen en [ I ] se puede observar que para una solución computacional rápida a problemas Similares al aquí planteado, resulta conveniente la combinación de formulaciones realizadas mediante elemento finito y procesos iterativos de cálculo. Mediante esta combinación las iteraciones se reducen y se pueden obtener resultados precisos en menos pasos, reduciendo considerablemente el tiempo de calculo; y aprovechar los resultados así obtenidos para la planeación de experimentos que ayuden a validar los resultados teóricos.
El estudio de [I] también incluye la determinación de frecuencias naturales y la forma modal generalizada para una viga Timoshenko libre-libre donde se presenta un ejemplo numérico que ilustra un fenómeno relacionado con el efecto que el primer momento tiene en la conducta de la frecuencia natural de la viga. Los parámetros que ahí se mencionan resultan de grana interés para la planeación del experimento.
1.2 Análisis de vigas con fractura
Para el análisis de vigas con fracturas que se someten a vibración se encuentran diversas publicaciones que son Utiles para determinar las variables de interés a considerar en la experimentación. Estos estudios aquí mencionados pueden ser o no experimentales; pero el enfoque de las magnitudes relacionadas a las vibraciones mecanicas en escénica son las mismas para un trabajo numérico y uno experimental.
Dentro de las publicaciones relacionadas con el tema se tiene a Shen y Pierre [2], donde se explica que un amplio conocimiento de los modos de vibración de una estructura danada es útil para poder determinar la posición y tamano de la fractura. En los estudios que se mencionan en [2] se determinan los cambios en las frecuencias naturales causados por fracturas, pero no se toma en cuenta el efecto sobre la forma de los modos. Sin embargo, las fracturas con diferente posición y profundidad podrán causar casi el mismo cambio en la frecuencia natural. El estudio

C-
de las fracturas en [2] se lleva a cabo considerándolas siempre abiertas y es solo para las tres frecuencias más bajas. Las pruebas realizados por [2], revelan que el cambio en la forma de los modos prácticamente no afecta al segundo modo, y los otros dos solo presentan cambios significativos para relaciones de fractura grande, aproximadamente de 113.
para poder estimar adecuadamente la posición y profundidad de la fractura a partir de mediciones. de vibración, debe ser considerada simultáneamente la información proporcionada por la frecuencia y la forma de 10s modos.
Pasando específicamente a un estudio realizado para vigas en cantiliver, Leissa y Sonalla [3] presentan el estudio en detalle del movimiento recto de una viga en cantiliver, Ya que el estudio de vibraciones libres de Sistemas continuos como 10 son las vigas, se enfoca típicamente a encontrar 10s valores propios (frecuencias) Y las correspondientes funciones propias (formas de 10s modos), se Pone Poca atención en determinar el movimiento de un sistema flexionado con desplazamiento ylo velocidad inicial conocida. Las suposiciones que se consideran para el análisis de una viga deformada en cantiliver son: el material es homogéneo y la sección transversal' es.constante en toda su longitud; además de'tener dos 'ejes de simetría perfectamente determinados, el desplazamiento de la viga se caracteriza por el desplazamiento transversal y se desacoplan los modos de vibración de los transversales. Se consideran casos de condiciones iniciales tales como la flexión producida por un momento aplicado en uno de los extremos, cuyas formas de los desplazamientos fueron usadas para reemplazar el modo de la frecuencia libre fundamental de la viga.
"Una vibración es un movimiento el cual es periódico o casi periódico, en el tiempo"; esta afirmación realizada en [3] se enuncia a causa de que el estudio de la vibración puede diferir. a partir del concepto de vibración; por ende uno de los problemas principales es determinar cuándo un movimiento es una vibración y cuándo solamente una respuesta dinámica.
El dilema en determinar si un movimiento es vibratorio no está limitado al problema de las vigas en cantiliver. Este podrá ocurrir en elementos esenciales de estructuras (vigas, vigas curvas, placas y cascarones) o en estructuras completas (combinación de elementos estructurales).
El movimiento será Perfectamente periódico solo si: (1) las frecuencias naturales de los modos iniciados son todas múltiplos razonables de cada una de las otras; (2) y solamente está iniciado un numero finito de los modos.
Los resultados .que [3] presenta, son para vibraciones libres y sin amortiguamiento, estas consideraciones son sólo teóricas y no pueden existir realmente, ya que para una viga real en cantiliver, existen cuando menos tres tipos de amortiguamiento presentes: (1) aerodinámico, a causa del aire existente en el medio circundante; (2) del material, también conocido como estructural o amortiguamiento de histéresis, el cual ocurre dentro del propio material; y (3) deslizamiento en la frontera, amortiguamiento por fricción a causa de la imperfección en el empotramiento o anclaje.
Continuando con el análisis por vibración de elementos Shen y Taylor [4] tratan el problema de vibración unidimensional en estructuras continuas, donde la vibración puede ser separada en dos categorías: la vibración longitudinal la cual es
1-3
descrita Dor una ecuación diferencial de segundo orden, y la vibración flexionante, . - - ~
descrita por un sistema de cuarto orden [4]. El método que se describe en [4] puede ser aplicado como componente de
una técnica de detección de daño de una viga vibrando, la cual no modifica sus condiciones reales. Se presenta la formulación para la identificación de vigas fracturadas con un par de fracturas simétricas. Las diferencias de mínimos cuadrados entre valores medidos y modelados de frecuencia y forma de modo son emoleadas en una de las formulaciones. La identificación del problema de fractura r ~ - - ~
puede ser constatada en la forma min-max, la cual corresponde a la meta Para minimizar 10s grandes valores entre la serie de medidas de la diferencia de datos tomados y 10s correspondientes valores obtenidos del modelo.
La identificación del problema de fractura es encontrar los parámetros de la viga dañada, para satisfacer apropiadamente las limitaciones y minimizar la diferencia de mínimos cuadrados, o el apropiado criterio en el tratamiento min-max.
Para los estudios relacionados con la presente experimentación se encontró que un de los mas útiles es el realizado por Quian y Jiang [5], donde se realiza la investigación de una estructura dañada con ayuda de la vibración, como aproximación de diagnóstico de falla. Con la limitante de quedarse es un estudio puramente numérico. Donde se le hace especial énfasis al diagnóstico de vibración como técnica de detección no destructiva que ha alcanzado gran importancia en anos recientes.
En el plano de la fractura, la deformación es discontinua y la solución puede ser obtenida de una ecuación característica, en la cual las condiciones para el desplazamiento ,intern0 y la fuerza sean consideradas. Para la consideración de la discontinuidad de la deformación debida a la fractura, se adoptan dos diferentes funciones que consideran a la viga en dos segmentos separados. A partir de esto se obtuvieron el elemento de la matriz de rigidez y la consistencia de la matriz de masa.
Únicamente han sido reportadas unas cuantas respuestas de análisis de estructuras con fractura, especialmente análisis sobre los efectos de fractura cerrada. En la abertura y cierre de la fractura, los parámetros físicos de la ecuación de movimiento están variando con el tiempo, siendo el parámetro más importante la rigidez. Por lo tanto es imposible obtener las propiedades dinámicas directamente de la solución de la ecuación característica.
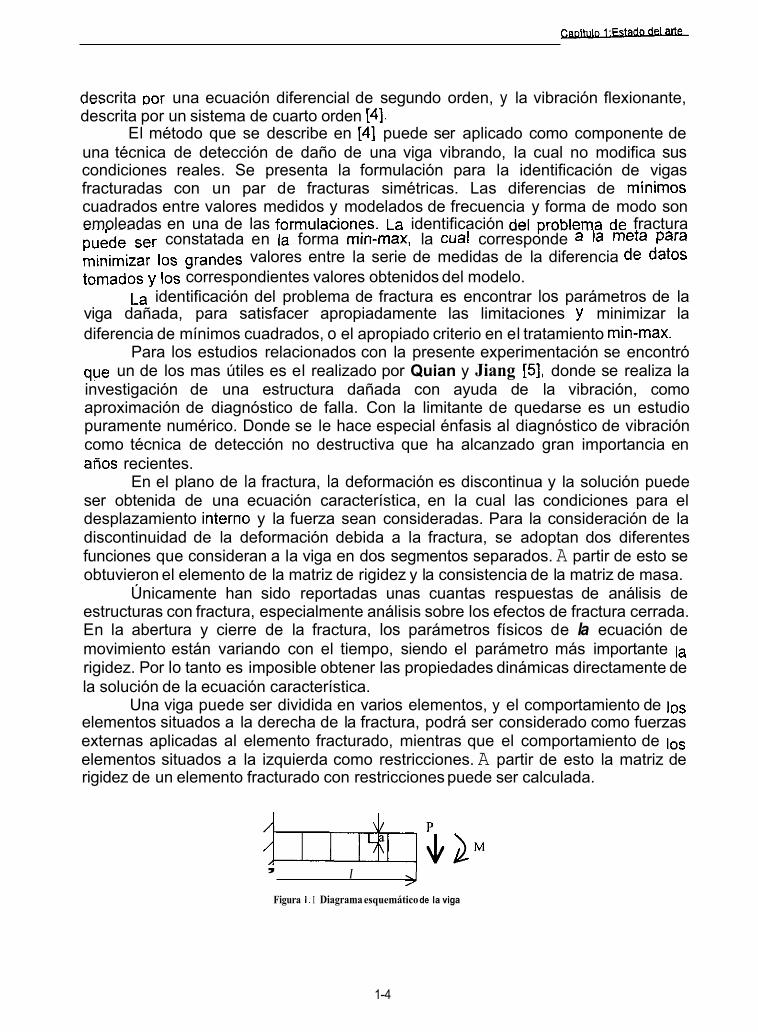
Una viga puede ser dividida en varios elementos, y el comportamiento de 10s elementos situados a la derecha de la fractura, podrá ser considerado como fuerzas externas aplicadas al elemento fracturado, mientras que el comportamiento de 10s elementos situados a la izquierda como restricciones. A partir de esto la matriz de rigidez de un elemento fracturado con restricciones puede ser calculada.
I , J Figura I . I Diagrama esquemático de la viga
1-4
Se ha probado que la frecuencia característica con diferente orden, depende solamente de la poSición.de la fractura, tamaño de la fractura Y las dimensiones geométricas de la estructura [5]. Basándose en el cambio de la frecuencia
puede ser determinada la posición de la fractura; el inconveniente es que la posición de la fractura no es Única. De esta manera, se hace necesario estudiar la relación existente entre el cambio de modo Y la Posición de la fractura. Generalmente hablando, para el primer modo la deformación de la fractura en el extremo libre se incrementa, mientras que la deformación de la fractura en el extremo fijo decrece.
EI análisis del comportamiento en fracturas que abren y Cierran es muy complejo, dado que se requiere conocer el campo esfuerzo-deformación de la fractura, la forma de la interfase de la fractura y el nivel de apertura y cierre. Para la respuesta dinámica de una viga, cuando la fractura esta cerrada, puede ser considerada como una viga sin fractura, dado que la interfase de la fractura esta totalmente en contacto una con la otra. Bajo la acción de excitación de fuerza externa, la fractura abre y cierra alternadamente en función del tiempo, dando como consecuencia que la ecuación de movimiento se vuela no lineal.
Las estructuras tienen diferente comportamiento mecánico, durante la apertura y cierre de la fractura, el cual es función de la carga externa. De aquí que la frecuencia natural de la estructura sea también función de la carga externa.
Dentro de las investigaciones experimentales que se relacionan con la que se plantea en éste trabajo de tesis; en cuanto a descripción de equipo y realización de la prueba para vigas en voladizo se presenta la realizada por Tabaddor y Nayfeh [6], la cual se realiza para encontrar respuestas en los modos de una viga metálica excitada transversalmente. Muestran un esquema del experimento y las características del equipo utilizado, la viga bajo prueba y las posiciones en que ésta se prueba (horizontal y vertical), así como la ubicación de los elementos de medición.
Una vez colocada la viga y puesta a punto para el experimento, los únicos dos parámetros a controlar fueron la frecuencia de excitación y la amplitud. Los barridos realizados se llevaron a cabo variando cada uno de estos parámetros mientras el otro se mantenía fijo. En cada incremento de los parámetros de control, se esperó durante un tiempo lo suficientemente largo para tener una señal uniforme, antes de grabar la respuesta. Se logró obtener la magnitud de los picos en el espectro de la respuesta asociados con las frecuencias naturales en la viga.
El primer paso en cualquier estudio de vibraciones es la determinación de las frecuencias naturales lineales, Las frecuencias naturales de la viga fueron encontradas experimentalmente usando la función frequency-response del analizador de señales HP 5362A. Las entradas procesadas incluyen la señal del acelerómetro, midiendo la amplitud de una excitación aleatoria, y la Señal del extensómetro, midiendo la deformación inducida. Los picos en la porción de amplitud de la función frequency-response fueron asociados con las frecuencias naturales lineales de la viga. Para incrementar la confianza de las frecuencias obtenidas experimentalmente, se midió la función frequency-response a varios niveles bajos de excitación. También se realizaron chequeos periódicos de las frecuencias naturales de la viga para detectar cualquier daño por fatiga,
En [61 se Presenta una tabla comparativa, entre las frecuencias naturales obtenidas experimentalmente (función frequency-response) y teóricamente (teoría de
.,
Euler-Bernoulli y ABAQUS, un código comercial de elemento finito), obser~ándose variaciones en las primeras frecuencias de la viga colocada .Velficalmente.
Continuando con las investigaciones experimentales, se presenta a continuación una variante del problema estudiado en esta tesis. La investigación realizada por Chondros y Dimarogonas [7] proponen un método para la detección de fracturas en construcciones soldadas. Este consiste en medir periódicamente las frecuencias naturales, en particular las tres primeras armónicas de las estructuras o parte de estas estructuras. La relación de cambio entre la frecuencia medida en cualquier instante y cuando la estructura fue colocada por vez primera, proporciona información acerca de la existencia de fractura y además hace posible la estimación de las profundidades.
Para su experimento utilizan una viga de sección constante (20mm * 20mm) y longitud de 300mm con una masa concentrada en su extremo libre, la cual se une mediante soldadura; el arreglo es montado y fijado sobre una mesa vibratoria, para dar la relación entre el cambio en frecuencia natural de la viga vibrando y la profundidad.de la fractura en el extremo soldado. La profundidad de la fractura fue medida directamente y verificada .con un detector ultrasónico por uniformidad y profundidad actual. Las señales fueron tomadas y transferidas a un analizador de vibraciones y grabadas para obtener las gráficas de frecuencia contra amplitud de vibración.
LOS resultados experimentales proporcionan las bases para poder extender el método a otras geometrías -y Otras condiciones de frontera, donde la flexibilidad del área de fractura es un fenómeno prácticamente local y SU influencia en el campo de esfuerzos ya no es considerable a determinada distancia.
Para una viga doblemente empotrada de sección transversal constante, la ecuación de frecuencia para vibraciones transversales es [7]:
2 w = o a4 w a z4 __-
de donde h=pF&El, F es el área de la sección transversal, p es la densidad del material y Wes el desplazamiento vertical. La solución de la ec. (1.1) es de la forma [71:
Cuando la viga esta fracturada en alguno de los extremos soldados, de frontera son [7]:
w(O)=O, w(L)=O, EiW"(O)=KtW'(O), w'(L)=O
Kt constante de rigidez torsional.
(1 4 las condiciones
(1.3)
Para una viga en voladizo es procedimiento es similar. Las condiciones de frontera son [7]:

La ecuación de frecuencia es [7]:
! ’ O 1 O 1 - A - 1 i I 1
1coshJ.L s inhu -cosJ.L -sinW
donde A = KtlhEl L~~ resultados obtenidos en [7] revelan cambios en las frecuencias naturales
de los elementos bajo prueba, a causa de la profundidad de la fractura en este. Sin embargo el método aquí presentado tiene limitaciones; como por ejemplo: se asume que la fractura es superficial y transversal, extendida uniformemente a Io largo del ancho de la soldadura. También se asume que el material con el que se suelda tiene el mismo modulo de Young que la viga, y que la seccción transversal es rectangular y constante para cualquier longitud.
Consideraciones similares para las vigas fracturadas a las realizadas por [5] son retomadas por Lee y Ng [8],los cuales modelan una viga con fractura como dos vigas separadas por esta discontinuidad; utilizan el método de Rayleigh Ritz para calcular las frecuencias naturales y los modos de vibración de una viga simplemente apoyada. Los dos diferentes grupos de funciones que satisfacen las respectivas condiciones de frontera son considerados para estas dos vigas imaginarias.
Consideraciones importantes en este trabajo son: el comportamiento de la viga se asume descrito por la teoría de la viga de Euler; las fracturas se consideran siempre abiertas.
Los resultados obtenidos’en este artículo concuerdan con los encontrados por [Z]. Se encuentra que las fracturas de pequeña longitud tienen poco efecto sobre las frecuencias naturales y formas de los modos.
El método tiene la posibilidad .de ser extendido a una viga con multiples fracturas y combinaciones de fracturas por uno o dos lados de la viga.
Muientras que para Hearn y Testa [9], la forma del modo, la frecuencia y el amortiguamiento (los parámetros de los modos naturales) son productos en una estructura, de su masa y rigidez. Los deterioros de una estructura pueden alterar la rigidez y cambiar los parámentros modales. La magnitud de los cambios es función de dos factores, la severidad y localización del deterioro, y un simple deterioro afectará siempre de diferente forma a cada uno de los modos de Vibración, teniendo grandes efectos sobre ciertos modos y un débil efecto en algunos otros.
Existen dos problemas para la inspección estructural basada en la estimación de los parámetros de rigidez. Primero, obtener adecuadamente estimaciones experimentales de rigidez resulta complicado, y demanda un procedimiento de prueba totalmente controlado. Se’gundo, si las rigideces estimadas pueden encontrarse, la diferencia entre la rigidez obtenida experimentalmente y la rigidez estimada puede no ser fácilmente interpretada, ya que el valor de la rigidez esperada puede no ser una buena representación de la estructura,

si el cambio de efecto sobre varios modos puede ser predeterminado, ésta es la base para la identificación de miembros dañados. .si el daño se presenta como reducción de la sección transversal, entonces las relaciones cuantitativas entre el dano y los cambios resultantes en 10s parámetros modales pueden ser desarrollados
perturbación en la ecuación ,de movimiento. A Causa de que el cambio en los modos es distinto, la contribución de .la energía potencial hecha Por un miembro cualquiera será diferente para cada modo. ConSeCUentemente, el daño en un miembro influirá selectiva y particularmente a las frecuencias naturales de 10s modos en los cuales el miembro contribuye significativamente a la energía Potencial.
La magnitud del cambio en la frecuencia natural está determinada por la severidad del daño y por el miembro particular afectado. Un método de inspección estructural basado sobre análisis modal, reconoce que los datos fuente (por ejemplo frecuencias naturales) contienen información de ambas características: severidad y localización del daño.
Con la demostración experimental que se presenta, las frecuencias naturales y el amortiguamiento modal pueden ambas indicar daño. Las formas de los modos de vibración son un pobre indicador cuando el daño es pequeño y la masa no se ve afectada. Las frecuencias y amortiguamiento de varios modos no son igualmente sensibles al daño, y es específicamente esta desigualdad en la sensibilidad lo que ofrece la posibilidad de localizar el daño.
Una forma alternativa de excitación forzada para vigas con fractura, diferente a la que se habia estado manejando en los articulos previos es la que presenta Collins et al [IO], donde se habla acerca de las vibraciones longitudinales de una barra en cantiliver con una fractura transversal. El trabajo menciona que la frecuencia fundamenta decrece con. la fractura cambiando de posición del extremo libre de la barra hacia el extremo fijo. Los cambios en las frecuencias naturales para una fractura pequeña son muy pequeños. Tambien el espectro de frecuencia para el movimiento libre de una barra con y sin fractura siguiendo un desplazamiento inicial es similar uno al otro.
Para la vibración forzada la variación de respuesta en estado estable es representada como una función de la frecuencia de la fuerza y la localización de la fractura. La presencia de fractura adiciona armónicas a la respuesta, a causa de las no linealidades.
La fractura tiene poco efecto sobre las frecuencias de la vibración libre y sobre los desplazamientos bajo la acción de vibración forzada. Sin embargo causa un notable cambio en el espectro de frecuencia para el caso de vibración forzada, adicionado picos a múltiplos de la frecuencia de la fuerza. Con objeto de detectar fracturas en estructuras, deberá aplicarse una pequeña fuerza armónica Y obtenerse el espectro de frecuencia de la respuesta en estado estable. La presencia de armónicos podría indicar la posible presencia de fracturas. Para obtener el máximo efecto de la fractura, la frecuencia de la fuerza deberá ser ligeramente menor que la frecuencia natural mas baja de la estructura sin daño.
Una investigación de los efectos de contacto de una fractura por fatiga sobre el comportamiento dinámico de una estructura que permita examinar la posibilidad de detección de fracturas existentes basandose en los cambios de comportamiento en dominio del tiempo y la frecuencia es presentada por Shen y Chu [I I].

C-
L~ relación de rigidez mayor ocurre en ia correspondiente localización para la flexión máxima de cada forma del modo, y la relación de rigidez más pequefia Ocurre convenientemente en la reflexión de los puntos de cada forma del modo. Esto es, si la fractura se ubica en el punto de desplazamiento maxim0 para un modo, se Obtiene la reducción mas marcada de la constante de rigidez. si la fractura se localiza en el punto nodal de la forma del modo de la viga, la constante de rigidez del modo se reduce más que si la fractura se encontrara en cualquier otra localización.
Se encuentra que si el espectro patrón de una viga fracturada puede ser analizado correctamente seria muy útil para la identificación de una estructura dañada. La excitación con baja frecuencia es aplicable en una situación real.
Liang et al [I21 desarrollan una relación analítica entre los cambios en las frecuencias características y la localización y magnitud de la fractura. Si un grupo de frecuencias fue obtenido antes de que la estructura fuera dañada, las mediciones de frecuencias posteriores podrían ser usadas para determinar la incursión de daño en la estructura. Las frecuencias de una estructura pueden,ser medidas en un punto de esta y son independientes de otra posición seleccionada del nodo de cualquier modo de vibración particular.
Dos importantes suposiciones fueron hechas para la obtención de la teoría. Primero, se asume que el miembro estructural tiene un comportamiento lineal, esto da que la respuesta de la estructura para cualquier combinación de fuerzas simultáneamente aplicadas es la suma de las respuestas del miembro para cada acción de la fuerza. Segundo, las propiedades estructurales son invariables en el tiempo, la masa, rigidez y amortiguamiento no varían con el tiempo. Las estructuras que no contengan estas dos suposiciones no son validas para esta teoría. Las condiciones presentadas en el articulo pueden ser aplicables para vigas simplemente apoyadas y para vigas en voladizo.
Por ultimo, Abraham y Brandon [I31 presentan un método general para modelar vigas en voladizo con una fractura. transversal, lo cual es adaptado para incorporar varias características, tales como fricción seca y las interfaces de la fractura.
En la fractura abierta, las frecuencias naturales de la viga fracturada son mas bajas que las frecuencias naturales de una viga intacta. Ningún resultado para altas frecuencias revela que la diferencia entre la forma de los modos de una viga fracturada y una viga intacta se reduce para alto orden de frecuencias naturales. En la practica, mientras la viga esta vibrando, el estado de la sección de la fractura varia de tensión a compresión, o sea la fractura abre y cierra con el tiempo. Esto resulta en "na ~odificación de la rigidez en la sección de la fractura, cambian 10s valores extremos dados de la rigidez con fractura abierta y los de la viga intacta (cuando la fractura esta cerrada).
1.3 Consideraciones
Como puede observarse de los estudios realizados en el estado del arte para la detección de fracturas en vigas que se someten a vibración forzada; siempre se consideran dos parámetros de la vibración que son: la forma de los modos y las
1-9

cad-
frecuencias naturales de las vigas; por lo que a partir de este estudio realizado, se tiene que para el desarrollo de la metodologia planteada para realizar el experimento, no puede faltar ninguna de estas dos caracteristicas de la vibración.
Referencias
CORTES, c., "Diseño y Construcción de un Sistema de Excitación Mecánico para pruebas de Vibraciones Forzadas con Aplicaciones en Pruebas de Amortiguamiento por Fricción Seca", Tesis de maestría CENIDET, Cuernavaca, 1995. SHEN, M. [Y] PIERRE, C., 1990, "Natural Modes of Bernoulli-Euler Beams With Symmetrical Cracks", Journal of Sound and Vibration, Vol. 38, No 1 , pp.
LEISSA, A.W. [v SONALLA, M. I., 1991 "Vibrations of Cantiliver Beams With Various Initial Conditio'ns", Journal of Sound and Vibration, Vol. 150,
SHEN, M.H. [Y] TAYLOR, J.E., 1991, "An Identification Problem For Vibrating Cracked Beams", Journal of Sound And Vibration, Vol. 150, No. 3, pp 457-484. QUIAN, G.L. [Y] JIANG, J.S., 1990, "The Dynamic Behaviour and Crack Detection of a Beam With a Crack, Journal of Sound and Vibration, Vol. 138,
TABADOR, M. [Y] NAYFEH , A.H., 1997, "An Experimental Investigation of Multimode Responses in a Cantilever Beam", Journal of Vibration and Acoustics, Vol. 1 1 9, No. 4, pp 532-538. CHONDROS, T.G. [Y] DIMAROGONAS, A.D., 1980 "Identification of Cracks in Welded Joints of Complex Structures", Journal of Sound and Vibration,
LEE, H.P. [Y] NG, T.Y., 1994, "Natural Frequencies and Modes for the Flexural Vibration of a Crack Beam", Applied Acoustics, Vol. 42, pp. 151- 163. HEARN, G, [Y] TESTA, R.B., 1991, "Modal Analysis for Damage Detection in Structures",Journal of Structural Engineering, Vol. 117. No. 10, pp. 3042- 3063. COLLINS, K.R., 1992, "Free and Forced Longitudinal Vibrations of Cantilivared Bar With a Crack" Journal of Vibration and Acoustics, Vol. 114,
SHEN. M.H.H. [Y] CHU, Y.C., 1992, "vibrations of Beams With a Fatigue Crack, Computers & Structures, Vol. 45, No. 1 , pp. 73-93. LIANG, R.Y. et al, 1992, "Theoretical Study of Crack Induced Eigenfrequency Changes on Beam Structures", Journal of Engineering Mechanics, Vol. 118, No. 2, pp. 384-397. ABRAHAM, O.N.L. [Y] BRANDON, J.A., 1995, "The Modelling of the Opening and Closure of a Crack, Journal of Vibration and Acoustics, Vol.
115-134.
NO 1 , pp 83-99
NO. 2, pp 233-243.
Vol. 69, NO. 4, pp. 531-538.
pp. 171-177.
117, pp. 370-377.
1-10

Capítulo 2
Planteamiento del problema y teoría básica
Como se menciona en la introducción, la vibración esta presente en muchos procesos industriales y en general en actividades de la vida cotidiana. Resulta casi imposible imaginar cualquier comportamiento dinámico de algún sistema mecánico que se encuentre totalmente aislado de vibraciones.
Un problema frecuentemente asociado a las vibraciones mecánicas, es la presencia de fracturas que se presentan en los elementos en movimiento por diferentes causa. Así que, el tener una metodología que pueda servir para la detección de danos en los elementos mecánicos, ocupando para este fin la misma vibración producida por el sistema resulta muy interesante.
El problema aquí presentado se enfoca al desarrollo de una metodología que pueda ser utilizada para el propósito descrito previamente; tomando como base el estudio del estado del arte y de manera conjunta el trabajo de tesis realizado por Vázquez [I], donde se modelo el problema con el uso de FEM (siglas tomadas del ingles Finite Element Method) y mediante el paquete comercial algor aplicado a la detección de grietas en vigas en voladizo de sección rectangular constante sometidas a vibración transversal.
En dicho trabajo solamente se contemplan modelos teóricos, y no existe la certeza de que las vigas se comporten igual en la práctica; por tal razón como en todo trabajo numérico se requiere generalmente de experimentación que apoye los resultados obtenidos del modelo realizado en algor, o que establezca en qué casos es posible aplicarlos y en cuáles no.
2-1

caoitulo 2: Planteamiento dci iiroblema Y teorla bbica
Se requiere además una metodología básica para llevar a cabo estos experimentos con el equipo existente en el laboratorio de mecánica del cenidef; aunque como se describe en el desarrollo del experimento, se pude tener alternativas en el equipo utilizado; deforma tal, que se pueda tener una aplicación más amplia de la metodologia propuesta.
2.1 Planeación del experimento
El estudio de los métodos experimentales es una extensión necesaria de todos los temas analiticos. Conocer los métodos de verificar el trabajo analítico inyecta nueva vida y calidad a las teorias, y un claro entendimiento de las dificultades de las mediciones experimentales crea una actitud de cuidado en los teóricos que no puede generarse de ninguna otra forma [2].
La clave del éxito en el trabajo experimental es preguntarse de manera continua: ‘Qué se busca?, ¿Por qué se mide esto? ¿La medición resRonde cualquiera de las preguntas en realidad? ‘Qué dirá la medición?. Estas preguntas pueden parecer elementales, pero deben elaborarse con frecuencia durante el proceso de cualquier programa experimental.
Algunas preguntas particulares que deben plantearse en las fases iniciales de la planeación del experimento son [2]:
i Qué variables básicas deben investiaarse? 1 2 3
4
5 6
7
8
9 10
I
¿Qué control debe ejercerse sobre el experimento? ‘Qué márgenes de las variables básicas son necesarias para describir los fenómenos en estudio? ¿Cuantos puntos de información deben tomarse en los diversos intervalos de operación para asegurar un muestre0 de los datos, considerando la exactitud de los instrumentos y otros factores? ¿Qué exactitud de instrumento se requiere para cada medición? Si esta implicada una medición dinámica, ‘qué respuesta a la frecuencia deben tener los instrumentos? ¿Los instrumentos se encuentran en el mercado, o deben fabricarse para el experimento? ¿Qué precauciones de seguridad son necesarias si alguna operación peligrosa está implicada en el experimento? ¿Qué recursos financieros están disponibles para realizar el experimento? ¿Qué previsiones deben tomarse a fin de registrar la información? Las respuestas a las preguntas anteriores, se logran tomando en cuenta
algunas observaciones obtenidas de los trabajos descritos en el estado del arte y sobre todo la capacidad de los equipos y dispositivos que se utilizaran en el experimento (los cuales se mencionaran brevemente en el capítulo 3).
Por otro lado las variables independientes para el experimento son: 1)ia frecuencia de excitación y 2) la fuerza de excitación (ambas proporcionadas por el excitador con la ayuda de una fuente de voltaje regulada). Las variables que resultan como consecuencia de estas son: el modo excitado, el desplazamiento y la aceleración para determinados puntos de interés sobre la viga y la corriente
2-2
C ~ ~ I N I ~ 2: Planteamiento del oroblema Y teorla bkica
eléctrica con que el excitador es alimentado. Monitoreando todas las variables en todo momento (principalmente la corriente de alimentación y la fuerza de excitación), evita que cualquier equipo o parte de éste pueda resultar dahado.
Sobre la base de lo expuesto anteriormente en el presente capítulo y considerando las observaciones del capitulo 1; se establecen los objetivos y el alcance que se pretenden lograr con este trabajo de investigación experimental.
2.2 Objetivos
en todo trabajo experimental existe un nivel de incertidumbre: Los objetivos que se plantean a continuación son específicos, aunque como
Proponer una metodología experimental para la localización de grieta O falla en sistemas mecánicos. Contrastar los resultados que se obtengan experimentalmente con los obtenidos del paquete aigor. Además, tratar de encontrar relaciones adimensionales donde se incluya el tamaño de la incisión, que intente describir el comportamiento generalizado de vigas con fractura inducida.
2.3 Alcance y limitaciones
Establecer mediante la base de pruebas experimentales la capacidad real del equipo y material existente; intentar proponer una metodologia de detección de grietas que pueda ser aplicada prácticamente. De ser necesario se elaborara una lista de equipo y material con el que no se cuente; que sean de ayuda para ampliar este tipo de investigaciones; tomando como base la experiencia obtenida de esta investigación.
Sobre bases de mediciones experimentales intentar establecer la diferencia entre los resultados obtenidos numéricamente para problemas similares [I].
Tener los datos necesarios para agrupar las vigas dentro de grupos de familias cuyo comportamiento dinámico con fractura sea similar,
Se obtendrá una guía didactica para el estudio de fractura en vigas con el equipo existente en el laboratorio.
2.4 Análisis de vibraciones
Los sistemas oscilatorios pueden clasificarse como lineales o no lineales. Para los sistemas lineales se aplica el principio de la superposición. Por el contrario, las técnicas para el análisis de sistemas no lineales son menos conocidas y dificiles de aplicar. Sin embargo todos los sistemas tienden a volverse no lineales cuando aumenta la amplitud de la oscilación.
En el mundo real generalmente los sistemas son no lineales y el uso de modelos lineales es una forma de aproximación, para la cual frecuentemente se considera un determinado numero de justificaciones tales como[3]:
2-3
1. El análisis de sistemas lineales es más fácil que el de sistemas no lineales. 2. Actualmente muchos sistemas no lineales pueden ser modelados como
sistemas lineales. 3. si un sistema es esencialmente no. lineal, es posible (salvo unas Pocas
excepciones) linealizar su comportamiento con muy pequeñas variaciones de SU estado real, de acuerdo a las condiciones dadas. Hay dos clases generales de vibraciones, libres y forzadas. La vibración libre
es la que ocurre cuando un sistema oscila bajo la acción de fuerzas inherentes al mismo sistema y no existen fuerzas externas. El sistema bajo vibración libre vibra a una o más de sus frecuencias naturales, que son propiedades del sistema dinámico que dependen de su distribución de masa y su rigidez.
La vibración que tiene lugar bajo la excitación de fuerzas externas es una vibración forzada. Cuando la excitación es oscilatoria, el sistema es obligado a vibrar a la frecuencia de excitación. Si ésta coincide con una de las frecuencias naturales del sistema, se produce una situación de resonancia y ocurren oscilaciones peligrosamente grandes, que pueden terminar en una forma fatal cuando estas rebasan la deformación permisible del material, cuando rebasan la tolerancia de movimiento que tienen y llegan a intervenir con alguna otra parte en movimiento, etc.
Fuentes comunes de excitación armónica pueden ser: el desbalance en máquinas rotatorias, fuerzas producidas por máquinas reciprocantes o el movimiento de la maquina misma. Estas excitaciones pueden ser indeseables para equipo cuya operación puede ser perturbada o, para la seguridad de la estructura si se desarrollan grandes amplitudes de vibración.
En forma general tres coordenadas son necesarias para describir y posteriormente analizar una vibración: 1) la magnitud de la vibración; por ejemplo una amplitud de una onda seno; 2) la variación de la amplitud con la frecuencia; y 3) la variación de la magnitud y frecuencia característica de la vibración como .una función del tiempo [4].
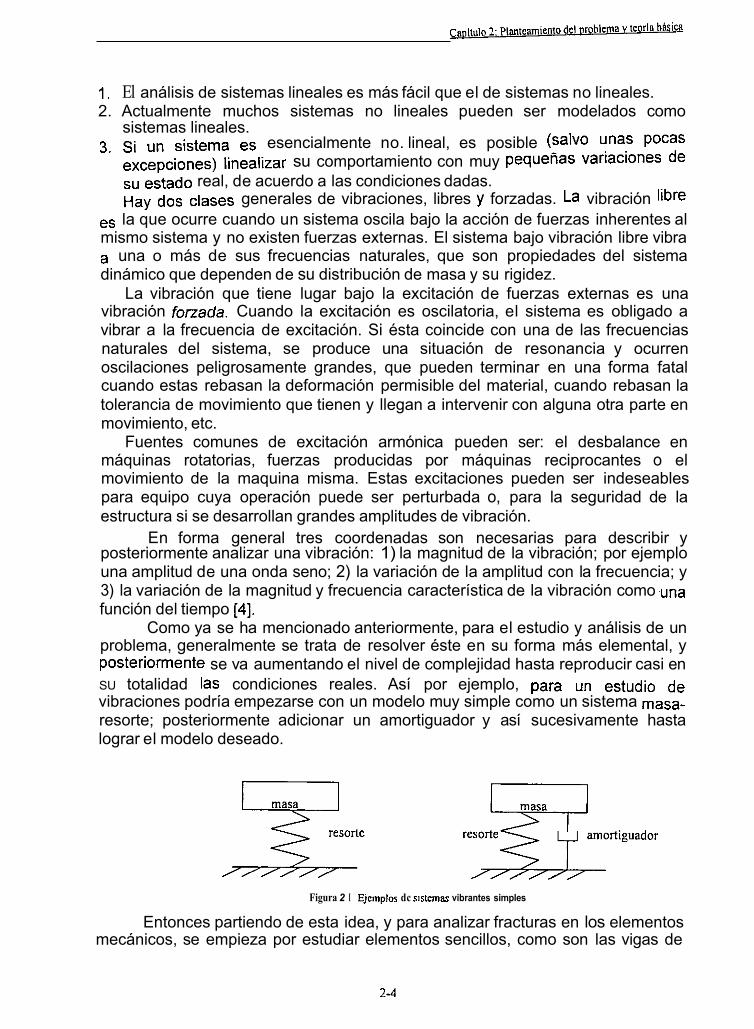
Como ya se ha mencionado anteriormente, para el estudio y análisis de un problema, generalmente se trata de resolver éste en su forma más elemental, y posteriormente se va aumentando el nivel de complejidad hasta reproducir casi en SU totalidad las condiciones reales. Así por ejemplo, para un estudio de vibraciones podría empezarse con un modelo muy simple como un sistema masa- resorte; posteriormente adicionar un amortiguador y así sucesivamente hasta lograr el modelo deseado.
Figura 2 I EJcmplos dc s l s m m vibrantes simples
Entonces partiendo de esta idea, y para analizar fracturas en los elementos mecánicos, se empieza por estudiar elementos sencillos, como son las vigas de
2-4

sección rectangular constante en toda su longitud. Posteriormente de ser posible, se extienden estos a geometrías más complejas.
Se empieza por describir las ecuaciones estáticas que relacionan las propiedades del material y sección de la viga, para posteriormente por ejemplo llegar a la ecuación Euler para vigas y sus correspondientes condiciones de frontera para vigas en voladizo (que es el tema de estudio de esta tesis).
En los tratados relacionados con resistencia de materiales, la ecuación diferencial de una viga sometida a flexión por una carga estática, tiene generalmente la siguiente forma [5]:
donde q es la carga uniformemente distribuida y Mes el momento flector. Si una, viga esta bajo ,un régimen de vibración continua, -a una cierta
frecuencia natural, la carga que actua sobre ella es una carga de inercia alterna. Para obtener un concepto físico de esta proposición, se tiene que, cuando la deformación de la viga hacia abajo es máxima, cada partícula de ésta experimentará una aceleración máxima hacia arriba. Y multiplicando por la masa de cada partícula, proporcionará la fuerza de inercia hacia arriba que la viga deberá ejercer sobre la partícula. De acuerdo con la tercera ley de Newton la partícula en cuestión deberá ejercer sobre la viga una fuerza hacia abajo. Naturalmente, mientras la viga pasa por su posición de equilibrio, las aceleraciones y por ende las cargas se reducen a cero, pero tampoco existirán deformaciones [5].
De esta forma, la ecuación diferencial que resulta para una barra de sección transversal uniforme es[5]
donde pf es la masa de la viga por unidad de longitud. Suponiendo una vibración libre sostenida con una frecuencia o, se tiene, al considerar las condiciones de la cuerda vibrante [6]
(2.3) y(x,t) = y(x)sen ot
que da a la primera ecuación la forma [6]
EI-=p,u2y d4Y dU4 (2.4)
El primer miembro de la ecuación es la elástica de la carga, mientras que el lado derecho es el valor máximo de la carga de inercia. Cualquier carga capaz de originar una curva de deformación similar a la curva de carga, podrá considerarse
2-5

caoitulo 2: Planteamiento del oroblema Y Leorla baica
como la carga de inercia durante la vibración; la frecuencia aparece solamente en el factor numérico pio2 que re1qciona.s las dos [5].
La solución general de la ecuación de la elastica contiene cuatro constantes de integración que pueden escribirse como [5]
y(x) = Cleax+ C2e-”+C3 sen ax+C4 cos ax (2.5)
C,, C2, C3, C4 son constantes de integración que se calculan por las condiciones de sus extremos. A cada extremo de la viga se asocian dos condiciones, reuniendo de esta forma con los dos extremos las cuatro condiciones requeridas. Estas son:
Figura 2.2 Condiciones en los cxlremos de la viga
de acuerdo a la figura 2.2 se tiene: a) Extremo libre b) Extremo empotrado
Esto resulta claro, si es que se considera el significado físico de las derivadas. En cualquier caso especifico, las cuatro condiciones de los extremos sustituidos proporcionan cuatro ecuaciones algebraicas homogéneas de las constantes C, [5].
y”=O, y”’=O (fuerza cortante y momento flector nulo). y = O, y’=O (deformación y pendiente nula).
2.4.1 Conceptos básicos de mediciones dinámicas
La medición estática de una cantidad física se lleva a cabo cuando la cantidad no varía en función del tiempo. La deformación o flexión que presenta una viga a causa de una carga constante, puede ser considerada como flexión estática; pero, si se establecen vibraciones en la viga, la flexión que resulta a causa de estas no es constante y está en función del tiempo. Por tal razón, el proceso de medición es mas complicado que para mediciones estáticas,
Debe establecerse que la función de desplazamiento en las vibraciones depende de la frecuencia de excitación que se aplica en función del tiempo t. Se dice que el sistema responde en forma diferente dependiendo de la frecuencia de entrada, y el comportamiento global se designa como la “respuesta de frecuencia” del sistema [2].
El problema de cualquier tipo de medición de vibración se refiere a la determinación de las cantidades apropiadas con referencia a algún estado específico, es decir, desplazamiento, velocidad o aceleración en relación con alguna referencia. En forma ideal debe tenerse un transductor de vibración conectado al cuerpo en movimiento. que suministre una señal de salida
2-6
Caoltulo 2 Planteamiento del vroblema Y teoria bisica
proporcional a la entrada vibracional. El transductor ideal es independiente de su localización.
Los valores de vibración pueden ser Útiles para predecir la falla a la fatiga de una parte en particular o de una máquina con un papel importante en los análisis en los que se requiera reducir la vibración de las estructuras o del nivel de ruido [2].
La mayor parte de los sistemas de medición puede dividirse en tres partes [2]: 1 Una etapa de detector-transductor, detecta la variable fisica y realiza una
transformación mecánica o eléctrica para convertir la señal en una forma más práctica. En sentido general, un transductor es un dispositivo que transforma un efecto fisico en otro. Sin embargo, en la mayor parte de los casos la variable fisica se transforma en una señal eléctrica, a causa de que ésta es la forma o señal que se mide con más facilidad. Una etapa intermedia, que modifica la señal directa por amplificación, filtrado u otro medio, de modo que esté disponible una salida deseable. Una etapa de terminación que indica, registra o controla la variable que mide.
2
3
2.5 Metodología
Para intentar cumplir con los propósitos de este trabajo de investigación, se propone la siguiente metodologia:
Colocación de las probetas en el banco de pruebas, de manera que el ángulo formada entre la viga y mesa sea de 90'. Determinar cuales son las frecuencias naturales de la viga, con ayuda del analizador de señales (funciones power spectrum y frequncy response)' y el martillo de impacto (golpendo con este sobre la viga hasta encontrar el punto donde el espectro se vea mas claramente). Determinar qué frecuencia es posible lograr sin que el equipo pueda ser dañado, y tampoco se pierdan caracteristicas de la señal digitalizada. Determinar la ubicación de los acelerómetros, de manera que estos se coloquen en un valle o cresta del correspondiente modo de vibración (excepto para el primer modo donde todos los puntos de medición se mueven en la misma dirección). Determinar la fuerza o fuerzas que el excitador pueda proporcionar para todas o casi todas las frecuencias, para tener un valor de fuerza de referencia (para este caso fueron 1 y 5N). Realizar el montaje de la viga con la mesa vibratoria, teniendo atención de no precargar la mesa vibratoria mediante presión excesiva de la viga. Realizar algunas pruebas para verificar el estado de todos los instrumentos y las correspondientes señales de cada uno de estos.
*La funciones pwcr spectrum y frcqucncy response san las empleadas para deleminar las gmlicas de los erpeclros donde se muestran los v a l o m de las frecuencias nalurales del sistema. La hincibn power spectrum corresponde a valores rcalcs quc se obntienc de la sena1 medida mediante la transformada rapida de Fourier y su conjugado; la funci6n frequency response corresponde al valor de una sena1 dividido entre otra sena1 de referencia: esla sena1 puede contener valores complejos.
2-7

cr,nitulo 2' Planteamiento del Drobierna Y teoria bbica
Realizar las mediciones y grabar un numero considerable de estas, de manera que se obtenga repetitividad. Transferir las grabaciones de senales a algún otro paquete computacional (matlab) para su revisión y análisis. Realizar las observaciones correpondientes.
En la figura 2.3 se presenta un diagrama a bloques de la metodologia planteada para el experimento.
Determinar, obtener y preparar las probetas
f r Colocar la probeta en el banco de pruebas 1
Obtener las frecuencias naturales
& Determinar puntos de medición 1
I Determinar la fuerza de excitación + f
Realizar el montaje con la mesa vibratoria
Realizar las mediciones de la prueba 1
r + Cambiar el formato de las señales grabadas a otro paquete de software 'i
f f Análisis de señales 1
Figura 2.3 Diagrama a bloques de la metodologia planteada
Referencias
[I] VAZQUEZ, J., "Detección Teórica de Grietas en Vigas con Vibración Transversal", Tesis de maestria CENIDET, Cuernavaca México 1998.
[2] HOLMAN J.P., MÉTODOS EXPERIMENTALES PARA INGENIEROS, Cuarta edición, Mc Graw Hill, México 1996, p 1.
[3] GENTA, G, Vibration of Structures and Machines, Segunda edición, Springer VerlagNew York, 1995, p 414.
2-8

Capitulo 2: Planteamienlo del problema Y leorin bhsica
[4]
[5]
[6]
HARRIS, C., Shock and Vibration Handbook, Mc Graw Hill, New York, 1961,
HARTOG J.P., Mecánica de /as Vibraciones, Cuarta edición, Mc Graw Hill, México, 1980, pp;’ 200-202. - THOMSON, W. T., Teoría de Vibraciones con Aplicaciones. Prentice, Hall Hispanoamericana, México, 1981.
I p22-1.
2-9
Capitulo 3: Analisis del banco experimental.
Capítulo 3
Análisis del banco experimental
Para la verificación de cualquier trabajo de investigación o análisis de tipo teórico, este debe ser complementado por una investigación experimental, la cual pueda contribuir a corroborar los resultados obtenidos teóricamente, y dar certeza de los resultados que ambas investigaciones están proporcionando.
Es una práctica común realizar en primer lugar modelación en algún paquete computacional (por ejemplo [I]). Esta forma de investigación y solución de problemas técnicos es justificada ya que los nuevos equipos de cómputo son cada vez de mayor capacidad; incrementan su memoria y usan procesadores más modernos y veloces.
Esto permite a los ingenieros e investigadores hacer un análisis mas profundo de los problemas técnicos, especialmente en la fase conceptual de diseño y rediceño de sistemas mecánicos (máquinas, mecanismos y/o elementos mecánicos).
El análisis computacional permite analizar y modelar experimentalmente solo la parte o partes del sistema mecánico que sean de mayor interés, para la verificación de cálculos numéricos y teorías aplicadas. Además, la inversión inicial requerida es considerablemente menor (si no se incluye como parte de los gastos del proyecto el costo del paquete) que' la realizada para llevar a cabo un experimento de laboratorio.
3-1
Capltula 3: AnAlisis del banco exTierimentRI.
Este puede aumentar dependiendo de Sí 1% Pruebas Por realizar son o no destructivas; además la simuiación.permite tener una más amplia gama de configuraciones para el mismo modelo.
Como se mencionó en el capítulo 2, esta investigación experimental es el seguimiento de un modelado numérico realizado en algor Por Vázquez [I], en el que se pueden encontrar algunas informaciones relacionadas con la fractura en vigas.
Para verificar cualquier trabajo numérico mediante pruebas de laboratorio, se requiere de un conjunto de accesorios, elementos, equipo y condiciones adicionales no previstos en el modelado, lo cual puede llegar a hacer mas complejo en algunos puntos el trabajo experimental al tratar de reproducir las condiciones del modelado, o por el contrario, disminuir la precisión de los datos experimentales.
Por ejemplo, en muchas de las gráficas de los resultados obtenidos por [I], la diferencia entre las curvas de los modos de vibración para una viga sin grieta y una con grieta son prácticamente la misma. Y para una prueba experimental esas pequerias diferencias pueden ser .ocasionadas por la digitalización de la señal analógica (señal de aceleración o desplazamiento principalmente). Por lo que esto no resulta en una verdadera comparación de la viga con y sin fractura.
Los desplazamientos que se presentan en [I] son todos normalizados y no se conoce el desplazamiento real de los puntos bajo observación; como se vera en el capítulo 5, los desplazamientos de un mismo punto sobre la viga varían considerablemente dependiendo de la frecuencia de excitación (y su correspondiente modo). Pero estos modos normalizados obtenidos numéricamente sirven de base para la comparación en cuanto a al forma que se debe obtener al someter la viga a vibración forzada.
Se considera que dos factores físicos son determinantes para poder reproducir las condiciones planteadas en el modelado:
1' El empotramiento, el cual se modeló en [I] como infinitamente rígido (condición muy dificil de reproducir).
2' La excitación aplicada sobre la viga, con fuerza y frecuencia controladas; la cual se mantiene constante a la salida del excitador electromagnético (con el cual se realizo el experimento), pero puede existir alguna variación de acuerdo a las uniones y superficies de contacto entre el excitador y la viga.
Otra consideración física importante .a considerar en la medición de puntos específicos sobre la viga, son las dimensiones que los acelerómetros tienen en su base. De forma tal que si se considera la viga compuesta de elementos finitos, la base del acelerómetro puede abarcar mas de uno de estos elementos y producir variaciones en la medición.
En el capítulo 4 se menciona mas a detalle en que consiste cada una de las pruebas; pero como en este capitulo se menciona el equipo que utilizado en la experimentación, aquí se presenta resumidamente en que consisten.
En al base de [ I ] y la revisión realizada en el capítulo 1, se decido por investigar el cambio en los desplazamientos y frecuencias naturales del sistema, y que afectan a los modos de vibración,
3-2
Para lograr esto se requiere de dispositivos que puedan generar y medir la vibración en puntos predeterminados (ver ubicación de los acelerómetros en capitulo 4), los cuales se mencionan mas adelante en este capitulo.
También se requiere de una estructura rígida que permita simular el empotramiento, sin que esta tenga influencia considerable sobre las mediciones realizadas En la sección base de sujeción se describe a esta estructura, además de realizar una comparación con otros bancos existentes en el laboratorio de mecánica del cenidet.
Otra parte importante del equipo utilizado es el analizador de señales, donde sedigitalizan las señales analógicas y la computadora donde se visualizan y almacenen las señales.
Se presenta una ultima sección en este capítulo, donde se mencionan algunos elementos diseñados o modificados que son requeridos para complementar el equipo con se realizaran las pruebas.
3.1 Equipo de vibraciones.
Con el nombre de equipo de vibraciones se denominara especificamente a los elementos, accesorios y equipo requerido que contribuyan a generar y medir el movimiento en el lugar que este se produce.
Dentro del conjunto del equipo de vibraciones están los excitadores con su respectiva fuente de alimentación, acelerómetros y sensores de desplazamiento, así como también sus correspondientes amplificadores, acopladores. cables, y extensiones.
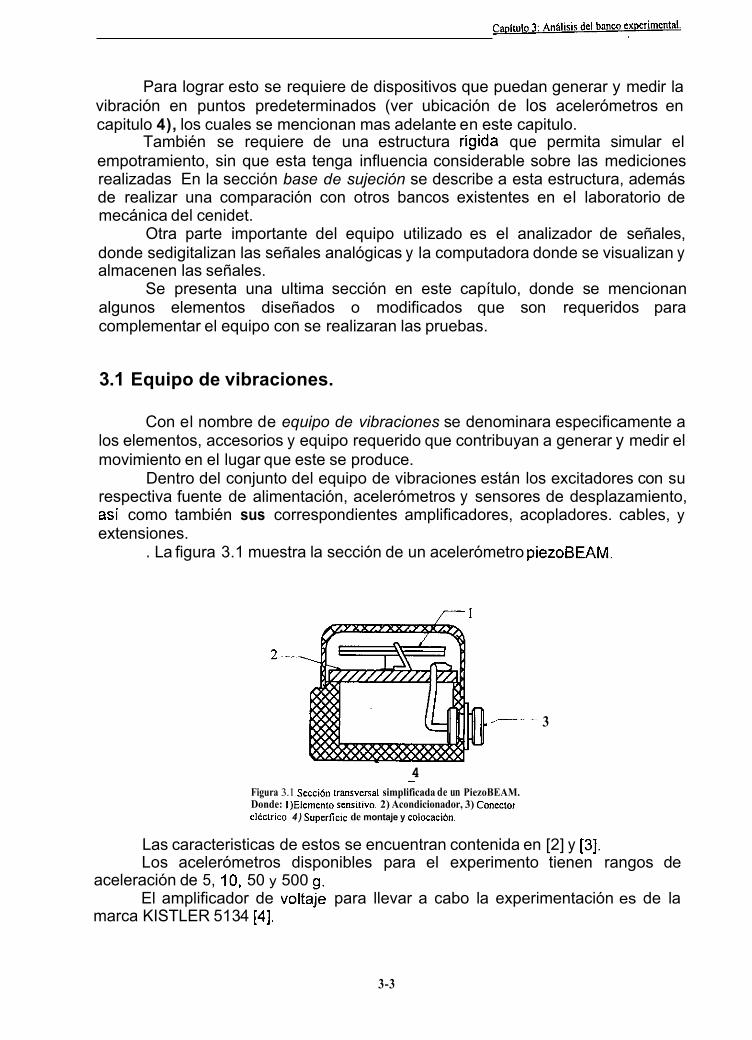
. La figura 3.1 muestra la sección de un acelerómetro piezoBEAM.
3 <---- -~
4 - Figura 3.1 Seccidn t r a n ~ ~ ~ r ~ s l simplificada de un PiezoBEAM. Donde: I)Elcmcnto sensilivo. 2) Acondicionador, 3) Concctor cl6c1rico. 4 ) Supcrficic de montaje y colocaci6n.
Las caracteristicas de estos se encuentran contenida en [2] y [3]. Los acelerómetros disponibles para el experimento tienen rangos de
aceleración de 5, 10, 50 y 500 g. El amplificador de voltaje para llevar a cabo la experimentación es de la
marca KISTLER 51 34 (41.
3-3
Cai>ltulo 3: Ansliris del banco exnerimelllal.
El amplificador dual 5010B, puede operar como amplificador de carga o como amplificador de voltaje; [SI.
El sensor de fuerza de la marca KISTLER, tipo 9312A puede transmitir y medir fuerzas dinámicas a tensión -y compresión, además de presentar una elevada rigidez (puede cargar hasta 500 kg) y pequeiio en cuanto a tamaiio (400 mm de longitud), lo que lo hace ajustarse precisamente a las necesidades requeridas para esta investigación.
Los excitadores con que se cuenta en el laboratorio de diseno que pueden ser utilizados para crear la fuerza de excitación en las vigas, son básicamente de tres
1. Motor excitador de corriente directa. Este tipo de excitador ya ha sido previamente usado por Sotelo [7] y
posteriormente por Diego [ B ] . La fuerza de excitación para este excitador, depende de la masa adicional
excéntrica, de la excentricidad y de la frecuencia a la que se encuentre girando el motor.
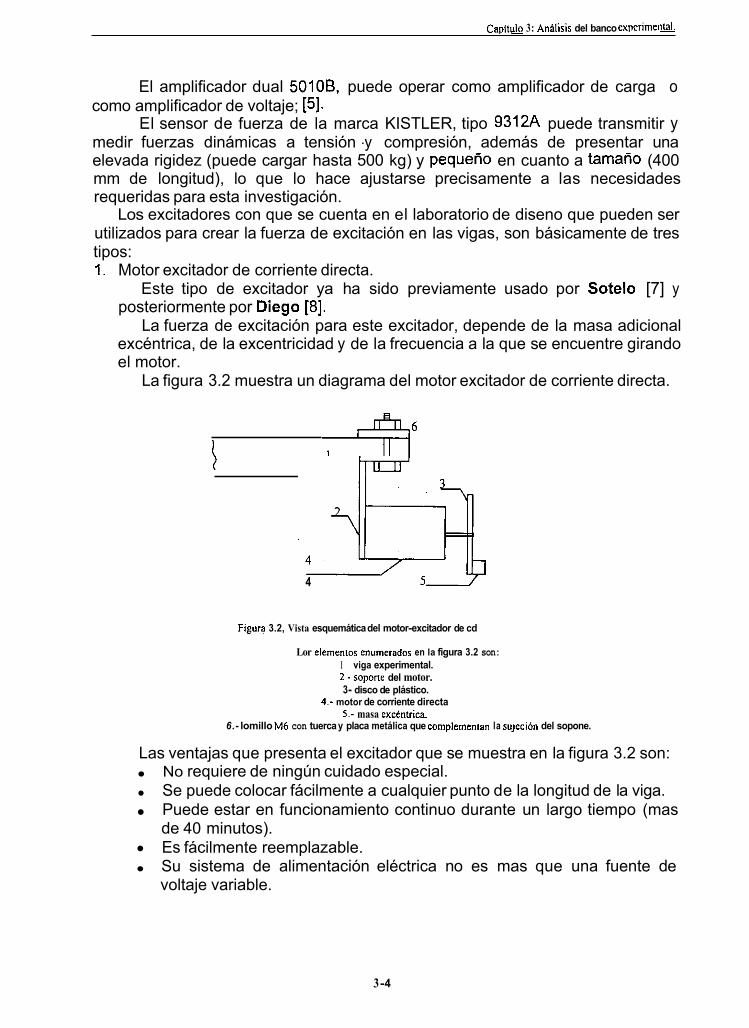
La figura 3.2 muestra un diagrama del motor excitador de corriente directa.
tipos:
.B 4
Figur! 3.2, Vista esquemática del motor-excitador de cd
Lor dementor envrncrador en la figura 3.2 son: I: viga experimental. 2.- sopone del motor. 3- disco de plástico.
4.- motor de corriente directa 5 . - masa exctntrica.
6.- lomillo M6 con tuerca y placa metálica que complerncnim la rujecihn del sopone.
Las ventajas que presenta el excitador que se muestra en la figura 3.2 son: No requiere de ningún cuidado especial. Se puede colocar fácilmente a cualquier punto de la longitud de la viga. Puede estar en funcionamiento continuo durante un largo tiempo (mas de 40 minutos). Es fácilmente reemplazable. Su sistema de alimentación eléctrica no es mas que una fuente de voltaje variable.
3 -4

Canitulo 3: Analisis dcl banco exnelimcnlal,
/ \ IR /
17 14 /
2. Excitador mecánico. Cortes [9] La figura 3.3 muestra una vista general del excitador La numeración correspondiente a la figura 3.3 es: 1 .- viga experimental o plataforma para elementos en pruebas de vibración. 2.- sistema de fijación del excitador con la viga experimental. 3.- sensor de fuerza de excitación. . :
4.- conectores. 5.- pasadores. 6.- guía del pasador. 7.- resorte o sistema de resortes. 8.- disco regulador de la compresión del resorte. 9.- punta del seguidor. 10.- disco con 60 ranuras en su perímetro para medición de rpm (revoluciones por minuto). 11 .- leva. 12.- motor eléctrico trifásico marca ABB de 1 HP, 3410 rprn. 13.- flecha del motor. 14.- dispositivo de seguidor de leva. 15.- soporte del brazo del excitador. 16.- base móvil del excitador,
18.- base fija del excitador. 17.- cubo.
4 &
3-5
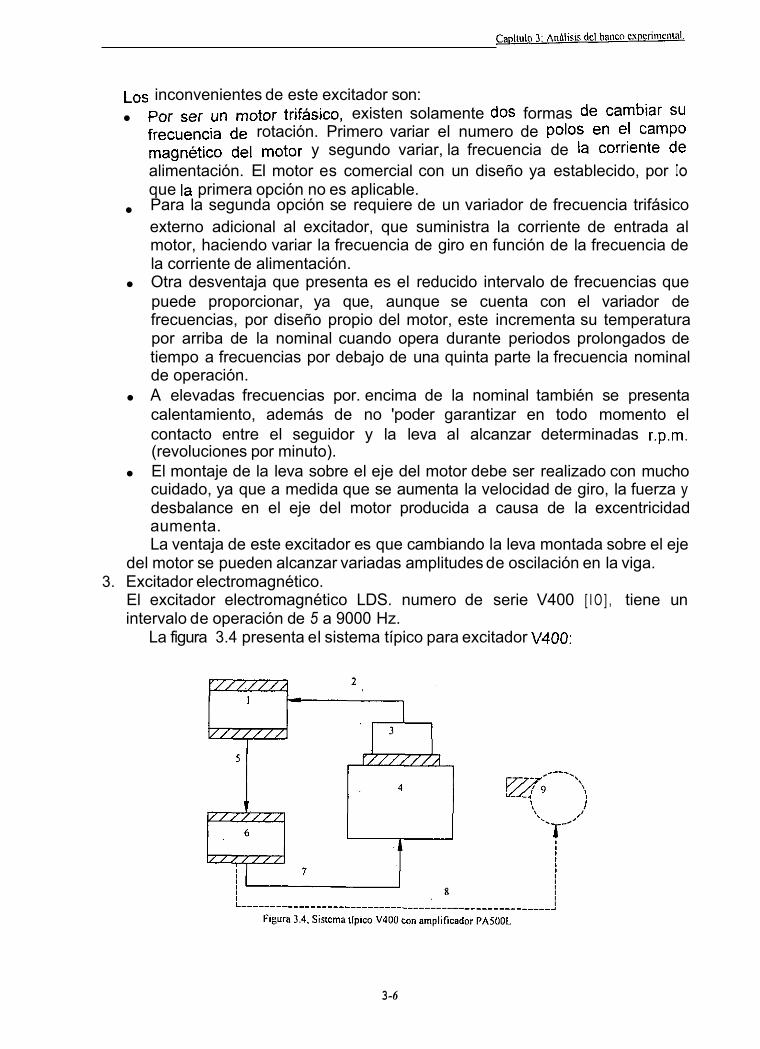
LOS inconvenientes de este excitador son: Por ser un motor trifásico, existen solamente dos formas de cambiar su frecuencia de rotación. Primero variar el numero de polos en el CamPo magnético del motor y segundo variar, la frecuencia de la corriente de alimentación. El motor es comercial con un diseño ya establecido, por IO que la primera opción no es aplicable. Para la segunda opción se requiere de un variador de frecuencia trifásico externo adicional al excitador, que suministra la corriente de entrada al motor, haciendo variar la frecuencia de giro en función de la frecuencia de la corriente de alimentación. Otra desventaja que presenta es el reducido intervalo de frecuencias que puede proporcionar, ya que, aunque se cuenta con el variador de frecuencias, por diseño propio del motor, este incrementa su temperatura por arriba de la nominal cuando opera durante periodos prolongados de tiempo a frecuencias por debajo de una quinta parte la frecuencia nominal de operación. A elevadas frecuencias por. encima de la nominal también se presenta calentamiento, además de no 'poder garantizar en todo momento el contacto entre el seguidor y la leva al alcanzar determinadas r.p.m. (revoluciones por minuto). El montaje de la leva sobre el eje del motor debe ser realizado con mucho cuidado, ya que a medida que se aumenta la velocidad de giro, la fuerza y desbalance en el eje del motor producida a causa de la excentricidad aumenta. La ventaja de este excitador es que cambiando la leva montada sobre el eje
del motor se pueden alcanzar variadas amplitudes de oscilación en la viga.
El excitador electromagnético LDS. numero de serie V400 [ I O ] , tiene un intervalo de operación de 5 a 9000 Hz.
3. Excitador electromagnético.
La figura 3.4 presenta el sistema típico para excitador V400:
3 -6
Cul)lliilo 3: AnSlisis del hanco expcrinlcnlul.
L~ linea segment& indica componentes que el Sistema actual no tiene, pero de 10s cuales requiere para operar a SU máxima capacidad. Las Partes constitutivas del sistema son: 1 .- equipo de control y retroalimentación (analizador HP 3566A). 2.- señal generada por la mesa vibratoria. 3.- carga colocada en la mesa vibratoria. 4.- vibrador LDS V400. 5.- señal de entrada al amplificador. 6.- amplificador PA500L[1 I ] 7.- control de la armadura [IO]. 8.- linea de enfriamiento. 9.- fuente de enfriamiento.
Los inconvenientes que este excitador presenta son: Para proporcionar la fuerza máxima (196 N), requiere de un sistema de
enfriamiento, y para llevar a cabo el desplazamiento máximo (18 mm pico-pico) requiere de un soporte auxiliar que aumenta su rigidez. Además el tiempo de operación máximo continuo con el sistema operando con. enfriamiento es de 40 minutos.
Otro inconveniente presente en el excitador electromagnético es que se sacrifica desplazamiento a costa de frecuencia. El desplazamiento máximo del excitador solo puede ser obtenido en bajas frecuencias (entre 10Hz y 53Hz aproximadamente según la curva de caracteristicas presentada en el manual del usuario [IO]); conforme aumenta la frecuencia de excitación (esta es igual a la frecuencia del voltaje de alimentación generado en la fuente) el desplazamiento se ve afectado de acuerdo a la relación:
donde: A. es la amplitud de desplazamiento máximo, y es el desplazamiento del punto donde se esta registrando la vibración, w2 frecuencia angular al cuadrado, a es la aceleración registrada por el acelerómetro en el punto de interés.
El desplazamiento se ve afectado de acuerdo a la frecuencia con la que el excitador se encuentra operando; de esta manera, al pasar de 300Hz aproximadamente, el desplazamiento ya no se aprecia visualmente, y solo se puede conocer este a traves de la señal que los acelerómetros proporcionan, llegando a ser de micras de metro para frecuencias superiores a ésta.
Pero no solamente el desplazamiento se ve afectado por la frecuencia, sino también la fuerza proporcionada por la mesa vibratoria varía de acuerdo a la frecuencia, la carga que se encuentra colocada en ésta, y la corriente de alimentación que el amplificador proporciona. Se observa que la fuerza es proporcional a la corriente que alimenta al excitador; as¡ que a una frecuencia superior a 1.3kHz la fuerza que se tiene en la salida de la mesa vibratoria puede ya no ser constante, d e acuerdo a [ I O]
3-1

L~ corriente de^ alimentación al excitador debe ser monitoreada en todo momento, ya que un exceso de flujo de electrones en el excitador Puede Ser la causa de elevación excesiva de temperatura (por arriba de la temperatura nominal) y de daño en el aislamiento de los devanados del excitador. La corriente sin enfriamiento no debe exceder de 6 amperes como máximo.
La fuerza máxima puede ser 'obtenida solamente en frecuencias iguales 0
inferiores a la parte de la gráfica [ I O ] donde la corriente es casi una recta. Para obtener esta fuerza máxima se tiene que llevar a cabo una combinación de frecuencia, voltaje de alimentación en el amplificador y la ganancia dada en la perilla del amplificador.
En el apéndice B se muestran las gráficas de voltaje y corriente contra ganancia del amplificador para distintos valores de frecuencia. Estas curvas fueron tomadas con el excitador operando en vacío; aunque solamente se verificaron algunas con carga, se observó que estos valores se aumentan muy ligeramente. Las gráficas obtenidas bien pueden ser usadas para tener la referencia del voltaje y la corriente que se esta aplicando al excitador y así poder prevenir cualquier daño al.equipo.
AI no contar este excitador con los elementos auxiliares de enfriamiento y soporte de aumento de rigidez, sus parámentros de viaje pico-pico y fuerza aplicada se ven reducidos a la mitad de los valores máximos [ I O ] .
Las ventajas que este excitador tiene son: 1 .- La mesa vibratoria transmite la excitación en una sola dirección y dos sentidos. 2.- La mesa vibratoria contiene barrenos con rosca interna (M4), lo cual permite
3.- En el intervalo donde la curva de corriente es lineal [IO], no existe deriva de
4.- La frecuencia de la señal con que es alimentado amplificador [I I] es la misma
5.- El equipo es la primera vez que es usado para pruebas, y se cuenta con su
De las comparaciones hechas a los tres diferentes excitadores con los que se cuenta en el laboratorio de mecánica, el que presenta mas ventajas para el trabajo a desarrollar es el excitador electromagnético LDS [IO].
Por tal motivo este es el que se usa para todas las pruebas a realizar con vibración forzada.
El martillo de tipo 9722A marca KISTLER [I21 se uso para proveer de una excitación por impulso a las vigas de prueba; y obtener experimentalmente las frecuencias de estas a partir de las gráficas obtenidas por la función frequency response y power spectrum.
El martillo de impacto tiene cuatro puntas de contacto para realizar los impactos en los elementos (vigas) que se desee probar [12].
Las puntas con que se realizaron las pruebas fueron la número 9916 (plástico, color verde) y en algunos casos la numero 9902A (punta de acero, color metalico).
unir rígidamente a éste el elemento de prueba.
fuerza o frecuencia.
que tiene la mesa vibratoria.
certificado de calibración.
3-8
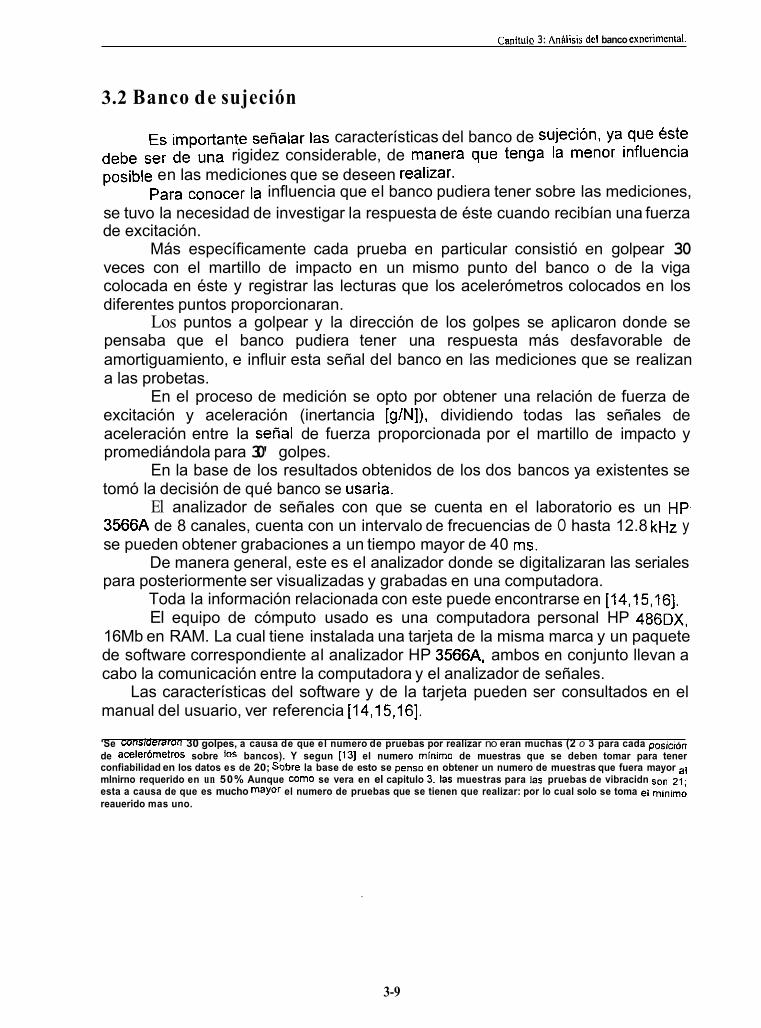
Cariltulo 3: Analisis del banco cxnerimental.
3.2 Banco de sujeción
importante señalar las características del banco de sujeción, Ya We éste debe ser de una rigidez considerable, de manera que tenga la menor i n f h m i a posible en las mediciones que se deseen realizar.
Para conocer la influencia que el banco pudiera tener sobre las mediciones, se tuvo la necesidad de investigar la respuesta de éste cuando recibían una fuerza de excitación.
Más específicamente cada prueba en particular consistió en golpear 30 veces con el martillo de impacto en un mismo punto del banco o de la viga colocada en éste y registrar las lecturas que los acelerómetros colocados en los diferentes puntos proporcionaran.
Los puntos a golpear y la dirección de los golpes se aplicaron donde se pensaba que el banco pudiera tener una respuesta más desfavorable de amortiguamiento, e influir esta señal del banco en las mediciones que se realizan a las probetas.
En el proceso de medición se opto por obtener una relación de fuerza de excitación y aceleración (inertancia [glN]), dividiendo todas las señales de aceleración entre la setial de fuerza proporcionada por el martillo de impacto y promediándola para 30' golpes.
En la base de los resultados obtenidos de los dos bancos ya existentes se tomó la decisión de qué banco se usaria.
El analizador de señales con que se cuenta en el laboratorio es un HP. 3566A de 8 canales, cuenta con un intervalo de frecuencias de O hasta 12.8 kHz y se pueden obtener grabaciones a un tiempo mayor de 40 ms.
De manera general, este es el analizador donde se digitalizaran las seriales para posteriormente ser visualizadas y grabadas en una computadora.
Toda la información relacionada con este puede encontrarse en [14,15,16]. El equipo de cómputo usado es una computadora personal HP 486DX,
16Mb en RAM. La cual tiene instalada una tarjeta de la misma marca y un paquete de software correspondiente al analizador HP 3566A, ambos en conjunto llevan a cabo la comunicación entre la computadora y el analizador de señales.
Las características del software y de la tarjeta pueden ser consultados en el manual del usuario, ver referencia [14,15,16].
'Se consideraron 30 golpes, a causa de que el numero de pruebas por realizar no eran muchas (2 o 3 para cada posicidn de acelerdmetros sobre 10% bancos). Y segun [13] el numero mlnirno de muestras que se deben tomar para tener confiabilidad en los datos es de 20; Sobre la base de esto se penso en obtener un numero de muestras que fuera mayor al mlnirno requerido en un 50% Aunque w m o se vera en el capitulo 3. las muestras para las pruebas de vibracidn son 21; esta a causa de que es mucho mayor el numero de pruebas que se tienen que realizar: por lo cual solo se toma el minim0 reauerido mas uno.
3-9

Canltulo 3: AnAlisis del banco caperirnental.
3.3 Diseño y rediceño de, equipo complementario para el experimento.
Además del equipo que ya se mencionó en las secciones anteriores de este capítulo, se requirió el diseño algunos otros accesorios que no se tienen, reacondicionar algunos para adecuarlos a las necesidades del experimento, adquirir algunos otros comerciales, .etc.
En esta sección se describirán todos los accesorios y componentes que no se habían descrito en las secciones precedentes de este capítulo; pero que son necesarios para poder llevar a cabo el experimento.
De lo analizado en la sección titulada banco de sujección, se concluyo que el banco a usar en el experimento es una máquina-herramienta ya en desuso (una fresadora copiadora), ya que esta cuenta con gran masa, una gran rigidez y las mesas (2 mesas móviles) para empotrar las vigas.
3.3.1 Elementos de sujeción para el empotramiento.
Otra condición importante es el complemento de las mesas para el empotramiento de las vigas. Para resolver éste problema se tomaron las dimensiones de las ranuras en T invertidas de las mesas de trabajo del banco (antes copiadora), así como la distancia existente entre ranuras. Y se procedió a buscar algún aditamento que se ajustara a estas necesidades en particular, encontrando y adquiriendo un juego de sujetadores para fresadora.
Ya con todos estos elementos se procedió a realizar pruebas en este banco (copiadora) similares a las practicadas en los otros bancos, para verificar que el objetivo se estuviera cumpliendo. c
3.3.2 Pruebas preliminares al empotramiento
Se preparó el empotramiento y se coloco una de las vigas empleadas por [7]; las dimensiones de la viga son las siguientes: longitud en voladizo de 600 mm, espesor de 4.5 mm y ancho de 50.7 mrn; se colocaron acelerómetros en tres puntos sobre la viga (y uno mas en el empotramiento.
El juego de sujetadores para fresadora se probó con el torquímetro para diversos aprietes (desde el mínimo que este torquímetro tiene 33.9 Nm, hasta 109 Nm) en los tornillos, revisando posteriormente a cada apriete las condiciones físicas de todos los elementos, no encontrándose ningún daño aparente.
Para las pruebas se decidió que los elementos que forman el empotramiento se apretaran a un torque de 1 01.7 Nm (no se apreciaban cambios considerables que para 61Nm, 101.7 Nm y 109 Nm en la gráfica de la función frequency response) aproximadamente, que da una carga equivalente superior a 5 toneladas sobre la viga. Este valor de torqué obedece a que no se presentaron cambios significativos en las mediciones respecto del valor de 109 Nm; pero en
3-10
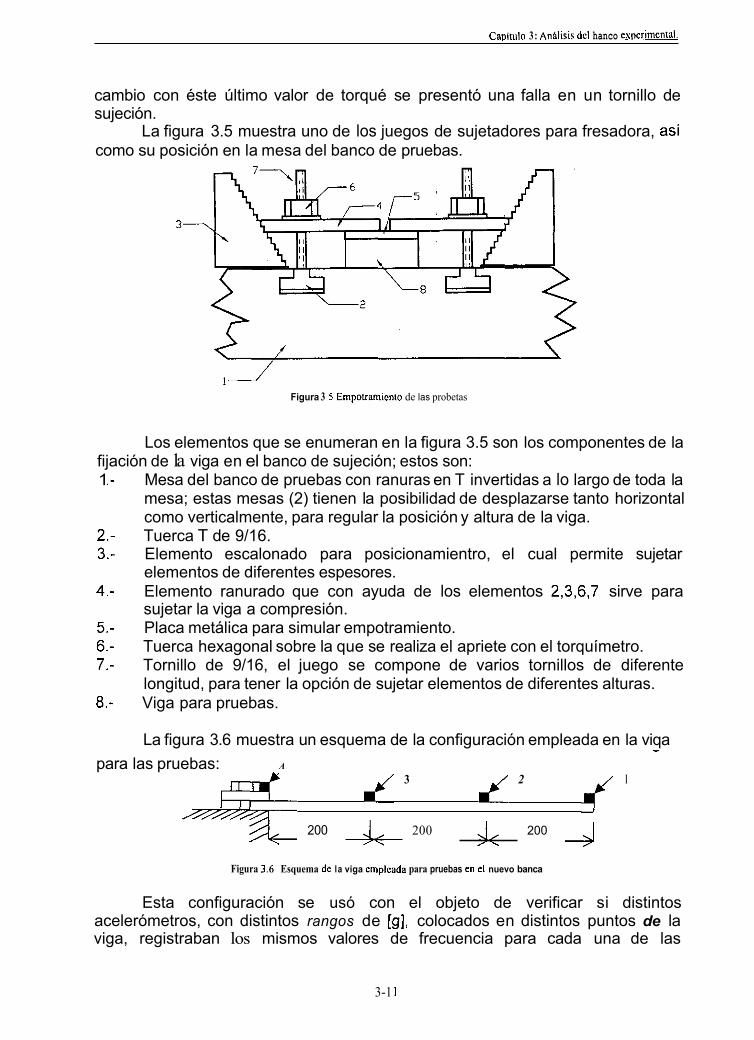
Canltulo 3: Ansliris dcl hanco exncrimcnial.
cambio con éste último valor de torqué se presentó una falla en un tornillo de sujeción.
La figura 3.5 muestra uno de los juegos de sujetadores para fresadora, así como su posición en la mesa del banco de pruebas.
1 .-
2.- 3.-
4.-
5.- 6.- 7.-
8.-
3-
Figura 3 5 Ernpotramicnio de las probetas I
Los elementos que se enumeran en la figura 3.5 son los componentes de la
Mesa del banco de pruebas con ranuras en T invertidas a lo largo de toda la mesa; estas mesas (2) tienen la posibilidad de desplazarse tanto horizontal como verticalmente, para regular la posición y altura de la viga. Tuerca T de 9/16.
fijación de la viga en el banco de sujeción; estos son:
Elemento escalonado para posicionamientro, el cual permite sujetar elementos de diferentes espesores. Elemento ranurado que con ayuda de los elementos 2,3,6,7 sirve para sujetar la viga a compresión. Placa metálica para simular empotramiento. Tuerca hexagonal sobre la que se realiza el apriete con el torquímetro. Tornillo de 9/16, el juego se compone de varios tornillos de diferente longitud, para tener la opción de sujetar elementos de diferentes alturas. Viga para pruebas.
La figura 3.6 muestra un esquema de la configuración empleada en la viqa - para las pruebas: A
3 2 I
200 J< 200 $J 200 J
Figura 3.6 Esquema de la viga cmplcada para pruebas en el nuevo banca
Esta configuración se usó con el objeto de verificar si distintos acelerómetros, con distintos rangos de [g], colocados en distintos puntos de la viga, registraban los mismos valores de frecuencia para cada una de las
3-1 1

Cariliulo 3: Anklisis del hanco cincriniciilal.
frecuencias naturales de ésta. Con estas pruebas se Verificó que efec~iv~mente la posición de los picos de las Curvas obtenidas por cada acelerómetro coincidían en relación al eje de frecuencia, pero no así en SU amplitud (esta información se amplia en el capítulo 4).
Como se puede observar en el esquema la distribución realizada para llevar a cabo primeras aproximaciones en este banco (copiadora), Se realizo la sujeción, se monto la viga y se colocaron 4 acelerómetros, 3 sobre la viga y uno mas en el empotramiento.
Las características de los acelerómetros usados se encuentran en el apéndice D. La distribución que tienen los acelerómetros se determino de acuerdo con el punto donde se realizaron los primeros golpes con el martillo de impacto sobre la viga (excitación por impulso). En el extremo libre se encontraron mayores aceleraciones, disminuyendo la amplitud de la señal de aceleración (registrada en el mismo instante) conforme la ubicación de los acelerómetros era más cercana al empotramiento, obteniéndose la menor aceleración en el empotramiento.
Los golpes con el martillo de impacto fueron 30 para cada prueba y el punto de aplicación de estos fue variando cada que se completaba una de ellas.
Los puntos de aplicación para cada prueba fueron: Primero golpeando 30 veces en la parte inferior de la viga en la misma
Después se golpeó en la parte superior de la viga a la mitad de la distancia
Posteriormente se golpeo a la mitad de distancia entre 2 y 3. Finalmente a la mitad de distancia entre el acelerómetro 3 y el
empotramiento. Las señales obtenidas por cada acelerómetro fueron grabadas y
almacenadas para su posterior análisis en la computadora personal. Las señales obtenidas por cada acelerómetro tienen unidades de inertancia [glN].
Las señales obtenidas por estas pruebas para el acelerómetro 4 (colocado sobre el juego de sujetadores), revelan que la amplitud de esta señal nunca alcanza la unidad (1 glN), por lo que todas las lecturas en todas las pruebas para este acelerómetro están expresadas en milésimas de la unidad (g/N).
La relación mayor que se pudo observa'r entre' las lecturas tomadas del acelerómetro 4 y los de cualquier otro acelerómetro corresponde al 2%. Entonces, la inertancia del acelerómetro 4 corresponde cuando más al 2% de la inertancia de cualquier otro acelerómetro, aunque generalmente la relación encontrada entre estos es menor que esta cantidad.
Estos datos y este análisis mostraron que este banco es adecuado para en él poder llevar a cabo pruebas de vibraciones mecánicas, sin que el empotramiento tenga influencia significativa en los datos medidos de las correspondientes probetas (vigas).
dirección vertical donde se encontraba colocado el acelerómetro I.
entre el acelerómetro 1 y 2,
3.3.3 Banco del excitador
El excitador también requiere de un banco donde pueda ser colocado y fijado firmemente para su correcta operación.
3-12

Cniillulo 3 . Ankliris del hanco cx~crimcnlill.
Para adecuarlo a las pruebas a realizar, se tuvo que tomar en cuenta la la diferencia de alturas entre la mesa del excitador cuando esta colocado sobre dicho banco, y la altura minima alcanzada por la mesa del banco de sujeción. Esto fue necesario debido a que, aunque se cuneta con una unión especial entre la viga y el excitador,las diferentes longitudes que esta unión puede alcanzar no son muy grandes (menores de 25mm).
Una vez que se determino la distancia faltante para que tuvieran contacto la viga, la unión y la mesa del excitador, se procedió a obtener una distancia equivalente con bloques de madera.
Un esquema del banco para el excitador se muestra en la figura 3.7:
Figura 3 7 Banco del excitador
Las partes componentes del banco presentado en la figura 3.7 son: 1 _- Banco metálico [9], 2 y 3.- Bloques de madera con barrenos, que permiten ser fijados
rígidamente al banco metálico mediante barras roscadas, y cuyos bloques pueden apilarse de manera que se varia la altura en que puede ser colocada la viga. Además se pueden deslizar a lo largo del banco, modificando con esto las longitudes de las vigas o el punto de aplicación de la fuerza sobre la viga.
En el apéndice A se muestran los planos técnicos
3.3.4 Unión viga-excitador.
Como complemento del excitador es necesaria una extensión colocada en la
Esta unión debe tener características especiales requeridas por el
Tener un margen de aproximación con la viga, para poder ajustar la distancia existente entre estos dos elementos. Ser ligero, para no incrementar el peso sobre la mesa del excitador (el peso máximo a utilizar en cualquier prueba sobre esta mesa es de 49 N). Transmitir una fuerza no mayor de 200 N en ciclos repetidos, de acuerdo a la frecuencia a que se este llevando a cabo la prueba.
mesa del excitador que sirva de unión entre esta y la viga.
funcionamiento del excitador, como son:

. -
Debe contener un sensor de fuerza para registrar, medir y grabar esta. Soportar y absorber pequetios momentos y deflexiones, originados por la deformación de la viga. Ser una unión rígida que no permita cambios en la forma de la fuerza de excitación proporcionada por el excitador electromagnético. Ser lo mas corto posibles.
Basándose en los puntos antes mencionados, se procedió a elaborar la
El esquema ilustrativo del soporte se muestra en la figura 3.8: extensión de manera que fuera practica y fácil de colocar y retirar.
w
Figura 3.8 UniOn vigaixciiador
Las partes componentes de este extensor son: 1 .- Tornillo milimétrico M4 con contratuerca. 2.- 3 tuercas M6 unidas mediante soldadura. 3.- Contratuerca M6. 4.- Tornillo M6 sin cabeza y con perforaciones para alojar el alambre y
5.- Prisioneros estándar 118" con contratuerca. 6.- Sensor de fuerza KISTLER 9312A. 7.- Tornillo M6. 8.- Placa con perforaciones para unir a la viga. 9.- Alambre de acero de l m m de diámetro aproximadamente.
prisioneros.
La fotografía 3.1 muestra este elemento antes mencionado en su posición de trabajo.
3-14

Forografia 3.1 Unión viga-excitador en la posición de trabajo.
El tornillo M4 (1) del extensor tiene la misma cuerda que la cuerda interna encontrada en la mesa vibratoria del excitador electromagnético, por lo que estos dos se conectan directamente y se fijan mediante la contratuerca. El elemento (2) es un arreglo de 3 tuercas M6 soldadas eléctricamente, las cuales tienen la función de poder variar la longitud de la unión viga-excitador. Los elementos (1) y (2) se encuentran unidos mediante soldadura eléctrica. Los elementos (3) son contratuercas M6 las cuales tiene la función de unir firmemente los tornillos al sensor de fuerza y al arreglo de tuercas. Los elementos (4) son tornillos M6 maquinados especialmente, cuya cuerda es igual a la cuerda interna del sensor de fuerza, a los cuales se les maquinó la cabeza para desaperecerla, se les practico un barreno con broca de 3/64” concéntrico con el eje del tornillo, y un barreno pasante con cuerda de 1/8” para alojar los prisioneros. El dibujo de éste se encuentra en el apéndice A. Los elementos (5) son prisioneros de 1/8” con contratuerca, los cuales sirven para sujetar firmemente el alambre. El elemento (6) es el sensor de fuerza marca KISTLER modelo 9312 A, el cual mide la fuerza con que se esta excitando a la viga. El elemento (7) es un tornillo milimétrico completo M6, el cual se une firmemente al sensor de fuerza con ayuda de la contratuerca. El elemento (8) es una placa metálica perforada que sirve de unión entre la viga y el elemento unido al sensor de fuerza. El elemento (9) tiene aproximadamente 1 mm de diámetro y una longitud de 10 mm entre prisioneros, que son aproximadamente las dimensiones que Ewins [I71 recomienda.
De forma similar que para el banco de sujeción (copiadora) se realizaron algunos ensayos preliminares para determinar la utilidad de este; las cuales se describen a continuación.
3.3.4.1 Unión tornillo-alambre-tornillo
En la presente sección se presentan los resultados de las pruebas realizadas en la máquina universal para la unión.
3-15

Caoiiulo 3: A n h i s del banco exnerirnenlal.
La figura 3.9 muestra el comportamiento registrado en la máquina universal IBERTEST (la celda de carga con que se llevo a cabo la prueba es de 50 kN) con una extensión de rango de fuerza máximo de 200 N (el excitador electromagnético puede desarrollar una fuerza máxima de 196 N).
Para empezar con las pruebas a la unión viga-excitador, se separaron algunos elementos de dicha union. Los elementos que se separaron, son los que se considera que pudieran fallar primeramente al someterlos a la vibración forzada entre la viga y la mesa del excitador.
Los elementos son el 5), 4), 9), correspondientes a la figura 3.8.
TORNILLO-ALAMBRE- TORNILLO
200
- 150 z,
O O 0.05 0.1 0.15 0.2
Deformación [mm]
Figura 3.9 Diagrama de fuem VI defomaci6n del arreglo lomillo-alambre-tomillo
En la gráfica se puede observar que el arreglo implementado efectivamente soporta los 200 N a tension que son requeridos, se aprecia que la mayor parte de la carga se presenta en una deformación de aproximadamente 0.07 mm.
La curva mostrada no es una curva ascendente.constante, a causa de que para lograrla se tendria que precargar la pieza de prueba (con aproximadamente 15 N) y el resultado obtenido por el diagrama ya no seria el real.
La curva anterior varia dependiendo del apriete que se tenga en los prisioneros que sujetan el alambre flexible; de esta manera existe un intervalo en que la presión ejercida sobre el alambre por los prisioneros es insuficiente para mantener unidos a todos los elementos hasta finalizar la prueba.
El apriete con el que se realizaron las curvas mostradas fue obtenido experimentalmente a prueba y error.
Una vez que la unión tornillo-alambre-tornillo mostró que es capaz de soportar la carga máxima que puede proporcionar el excitador, se procedió a realizar la misma prueba para todo el extensor.
La figura 3.10 muestra el comportamiento de todo el extensor al someterlo a la prueba de tensión para la fuerza máxima que el excitador electromagnético puede proporcionar.
3-16
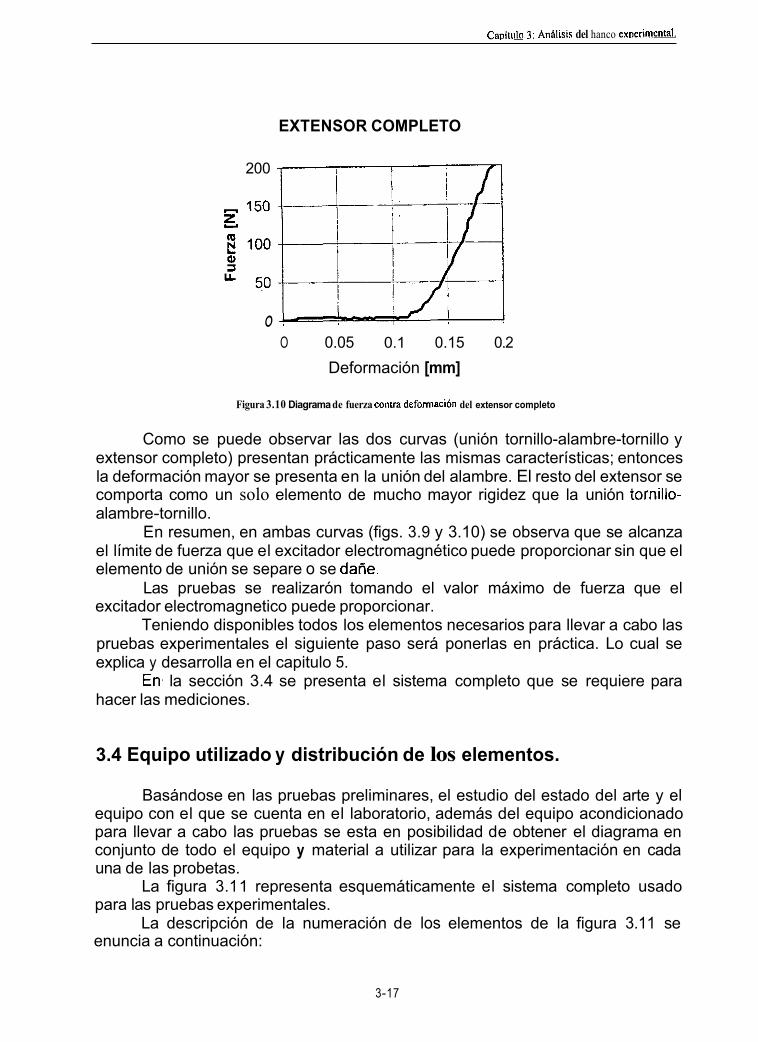
cniiltinlo 3: Anslisis del hanco cxw?rimcntal.
EXTENSOR COMPLETO
200
O O 0.05 0.1 0.15 0.2
Deformación [mm]
Figura 3.10 Diagrama de fuerza conva defomaci6n del extensor completo
Como se puede observar las dos curvas (unión tornillo-alambre-tornillo y extensor completo) presentan prácticamente las mismas características; entonces la deformación mayor se presenta en la unión del alambre. El resto del extensor se comporta como un solo elemento de mucho mayor rigidez que la unión tornillo- alam bre-tornillo.
En resumen, en ambas curvas (figs. 3.9 y 3.10) se observa que se alcanza el límite de fuerza que el excitador electromagnético puede proporcionar sin que el elemento de unión se separe o se daiie.
Las pruebas se realizarón tomando el valor máximo de fuerza que el excitador electromagnetico puede proporcionar.
Teniendo disponibles todos los elementos necesarios para llevar a cabo las pruebas experimentales el siguiente paso será ponerlas en práctica. Lo cual se explica y desarrolla en el capitulo 5.
En. la sección 3.4 se presenta el sistema completo que se requiere para hacer las mediciones.
3.4 Equipo utilizado y distribución de los elementos.
Basándose en las pruebas preliminares, el estudio del estado del arte y el equipo con el que se cuenta en el laboratorio, además del equipo acondicionado para llevar a cabo las pruebas se esta en posibilidad de obtener el diagrama en conjunto de todo el equipo y material a utilizar para la experimentación en cada una de las probetas.
La figura 3.1 1 representa esquemáticamente el sistema completo usado para las pruebas experimentales.
La descripción de la numeración de los elementos de la figura 3.11 se enuncia a continuación:
3-17
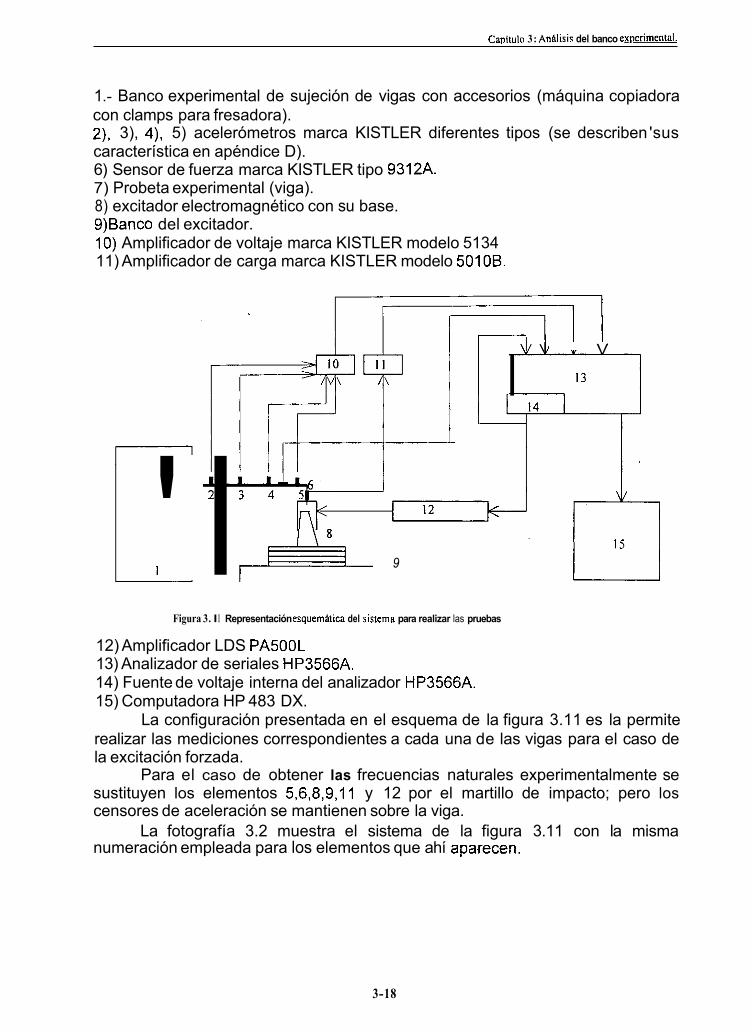
Caniaio 3: AnBIiais del banco exncrimenlal.
1 .- Banco experimental de sujeción de vigas con accesorios (máquina copiadora con clamps para fresadora). 2), 3), 4), 5) acelerómetros marca KISTLER diferentes tipos (se describen 'sus característica en apéndice D). 6) Sensor de fuerza marca KISTLER tipo 9312A. 7) Probeta experimental (viga). 8) excitador electromagnético con su base. 9)Banco del excitador. I O ) Amplificador de voltaje marca KISTLER modelo 5134 11) Amplificador de carga marca KISTLER modelo 50108.
' I I
V
I 13
9
Figura 3. I I Representación esquemilica del sistema para realizar las pruebas
12) Amplificador LDS PA500L 13) Analizador de seriales HP3566A. 14) Fuente de voltaje interna del analizador HP3566A. 15) Computadora HP 483 DX.
La configuración presentada en el esquema de la figura 3.1 1 es la permite realizar las mediciones correspondientes a cada una de las vigas para el caso de la excitación forzada.
Para el caso de obtener las frecuencias naturales experimentalmente se sustituyen los elementos 5,6,8,9,11 y 12 por el martillo de impacto; pero los censores de aceleración se mantienen sobre la viga.
La fotografía 3.2 muestra el sistema de la figura 3.11 con la misma numeración empleada para los elementos que ahí apa.recen.
3-18

Capitulo 3: nil lis ir del banco eS[IcrimenlaI.
Folografia 3.2 Banco experimental.
Referencias
[I] VÁZQUEZ, J., “Detección teórica de grietas en vigas con vibración transversal”, Tesis de Maestría CENIDET, 1998:
[2] “Operating Instructions”, en Manual de KISTLER. PiezoBEAM Accelerometers type 8628B, 8630B, 8632B, 8634B, 8636B, 8638B, 8690B, 8692B.
[;I “Operating Instructions”, en Manual de KISTLER. PiezoBEAM Accelerometers type 8702,8704, 8710,8720,8722, 8724, 8726,8728,8730,8790,8792 Series.
[4] “Operating Instructions’’ en manual de Kistler. Coupler power Supply type 5,134. [5] “Operating Instructions” en manual de Kistler. Dual Mode Amplifier type 5010B
and 5010BM2 .[6] “Operating Instructions” en manual de KISTLER Instrument Corporation. Quartz
Force Links, type 9312A. [7] SOTELO, C.A. “Análisis Numérico y Experimental del Impacto en Vigas Con
Vibración Transversal”, Tesis de Maestría CENIDET, 1995. [8] DIEGO, U. “Análisis Experimental de la Influencia del Impacto en Vigas en
Voladizo Sometidas a Vibración Transversal Forzada”, Tesis de Maestría, 1998. [9] CORTÉS, C. “Diseño y Construcción de un Sistema de Excitación Mecánico para
Pruebas de Vibraciones Forzadas con Aplicación en Pruebas de Amortiguamiento por Fricción seca”, Tesis de Maestría, 1997.
[ 1 O] User Manual” en manual LDS. Installation and Operating Manual, V400 series vibrators, Manual Number 892301.
[I 11User Manual” en manual LDS. Installation and Operating Manual, PAlOOE-CE, Amplifier, Manual Number 936221.
[ 121 “Operating Instructions” en manual de KISTLER Instrument Corporation. lmpuse Force Hammers, types 9722A(X). 9724A(X), 9726A(X), 9728A2000 and Accesories.
[ 131 HOLMAN, J.P., Métodos experimentales Dara ingenieros, Cuarta edición, Mc Graw Hill, México 1996.
[14]User‘s Guide en manual Hewlett Packard. Standar Data Format Utilities. [ISJUser’s Guide en manual Hewlett Packard. Progamming Manual (HP 3566A/3567A).
3-19

[16]User’s Guide en manual Hewlett Packard. Measurement Hardware Service Manual
[17] EWiNS, D.J., “Modal Testinp: Theorv and Practice” cuarta reimpresion, RESEARCH (HP 3566N3567A).
STUDIES PRESS LTD, Taunton, 1995.
3-20
Capítulo 4
Implementación de las pruebas
Con la ayuda del equipo descrito en el capitulo 3, se prepara y acondiciona el sistema para llevar a cabo la medición a las probetas y se revisan y verifican posibles anomalías que pudieran existir durante las pruebas.
Para empezar con las mediciones experimentales es necesario tener las probetas, con las cuales se realizará la investigación. Por tanto,, este tema es el primero que se tratará en este capítulo, posteriormente se describe el proceso de preparación de las pruebas, considerando primero la viga sin fractura y posteriormente la viga fracturada en cada una de las designaciones que se mencionan en la sección 3.1.
4.1 Las vigas
Como ya se explicó brevemente en el capitulo 3, las vigas se colocan y se fijan firmemente al banco de pruebas, con io que se obtiene el empotramiento y el resto de la viga queda en voladizo.
Las vigas a utilizar son de sección rectangular constante en toda su longitud.
Se decidió trabajar con elementos de sección rectangular constante a causa de que son de fácil adquisición comercialmente en su geometría y material.
Además, en esta investigación se trata de enfocar el problema en cuestión partiendo de un tipo en particular, para posteriormente llegar a un enfoque general
4- 1
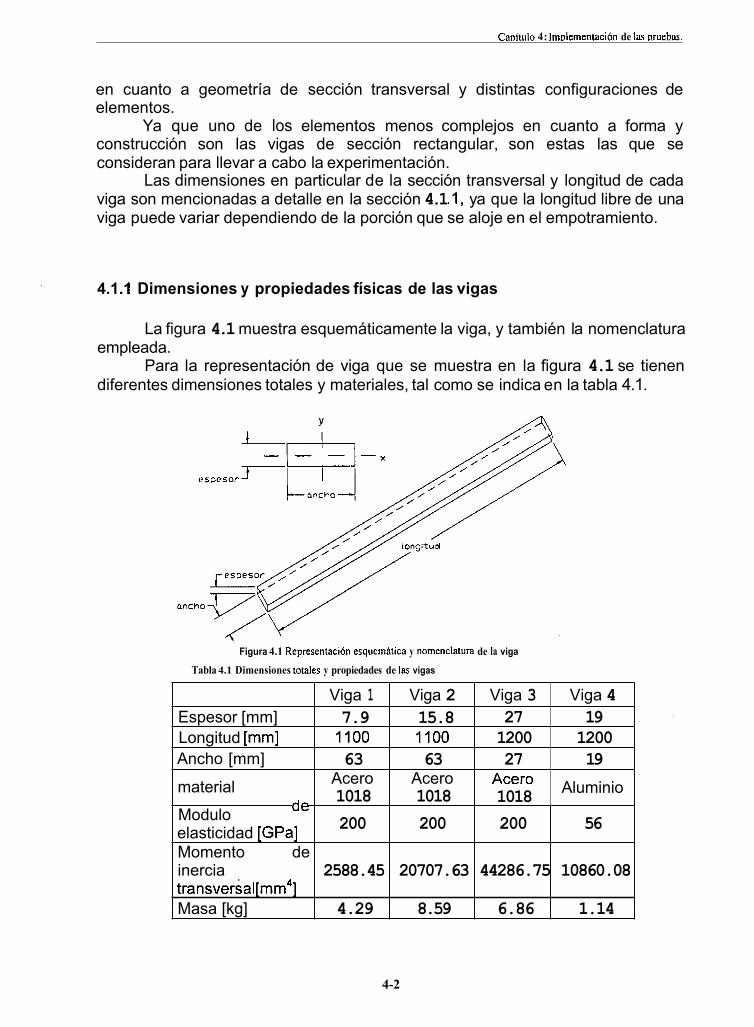
Canittilo 4: lrnolernentaci6n de lar riruebar.
Viga 1 Viga 2 Espesor [mm] 7.9 15.8 Longitud [mm] 1100 1100 Ancho [mm] 63 63
Acero Acero 1018 1018 material
en cuanto a geometría de sección transversal y distintas configuraciones de elementos.
Ya que uno de los elementos menos complejos en cuanto a forma y construcción son las vigas de sección rectangular, son estas las que se consideran para llevar a cabo la experimentación.
Las dimensiones en particular de la sección transversal y longitud de cada viga son mencionadas a detalle en la sección 4.1 .I, ya que la longitud libre de una viga puede variar dependiendo de la porción que se aloje en el empotramiento.
Viga 3 Viga 4 27 19 1200 1200 27 19
Acero Aluminio 1018
4.1 .I Dimensiones y propiedades físicas de las vigas
de Modulo elasticidad [GPa] Momento de inercia transversai[mm4] Masa [kg]
La figura 4.1 muestra esquemáticamente la viga, y también la nomenclatura
Para la representación de viga que se muestra en la figura 4.1 se tienen empleada.
diferentes dimensiones totales y materiales, tal como se indica en la tabla 4.1.
V
200 200 200 56
2588.45 20707.63 44286.75 10860.08
4.29 8.59 6.86 1.14
Figura 4.1 Repreienlacibn esquematica y nornenclalura de la viga
Tabla 4.1 Dimensiones tobales y propiedades de las vigas
4-2
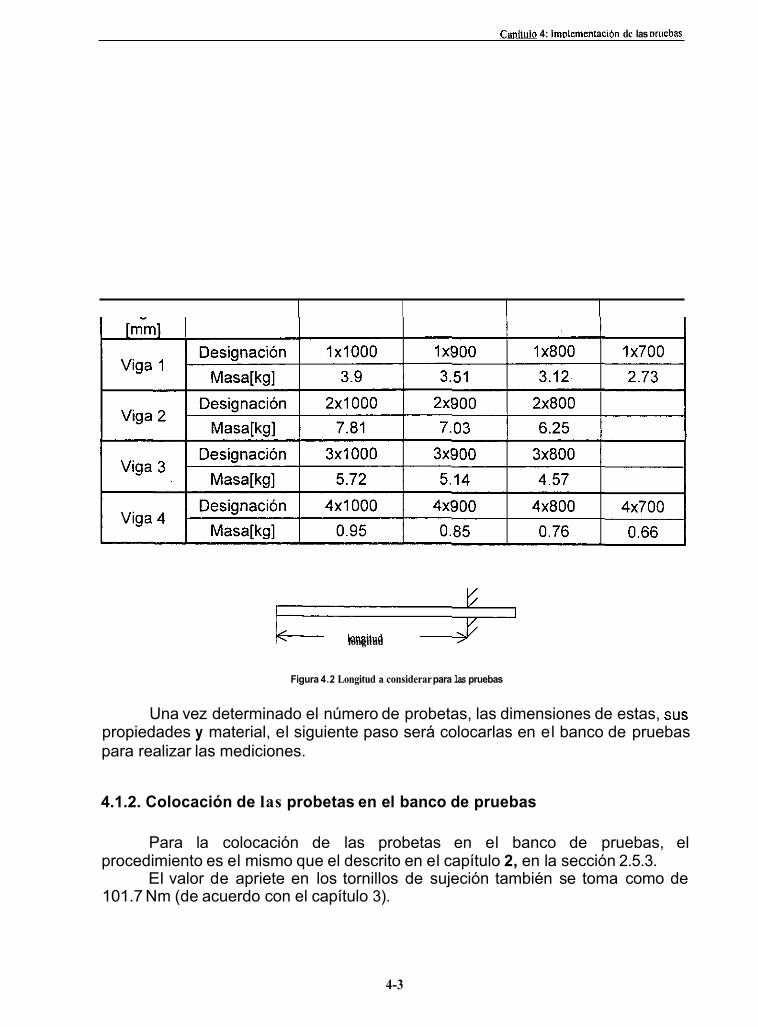
CaDltulo 4: Imolcmcntaci6n dc las nriicbas
+ longitud
Figura 4.2 Longitud a considerar para las pruebas
Una vez determinado el número de probetas, las dimensiones de estas, sus propiedades y material, el siguiente paso será colocarlas en el banco de pruebas para realizar las mediciones.
4.1.2. Colocación de las probetas en el banco de pruebas
Para la colocación de las probetas en el banco de pruebas, el
El valor de apriete en los tornillos de sujeción también se toma como de procedimiento es el mismo que el descrito en el capítulo 2, en la sección 2.5.3.
101.7 Nm (de acuerdo con el capítulo 3).
4-3

Capitulo 4: Im~lementaci6n dc las pruebas
Para la sujeción de todas las vigas se utilizan los sujetadores para fresadora; la diferencia en longitud de los tornillos que forman parte de los clamps depende del espesor de la viga que se tenga en el banco de pruebas.
Esto obedece a que se utiliza un torquímetro y un cubo de 22mm (marca CRAFSTMAN) para medir el apriete en los tornillos; el tornillo utilizado para cada diferente espesor de probeta debe tener una longitud tal que no sobresalga mas de 15 mm por arriba del nivel de la tuerca hexagonal (elemento 6, figura 3 3 , cuando esta tiene contacto con el elemento que ejerce presión sobre la probeta (elemento 4, figura 3.5).
Lo descrito en los dos párrafos anteriores es con el objeto de asegurar el mayor contacto entre la superficie externa hexagonal de la tuerca y la superficie interna hexagonal del cubo de 22mm que porta el torquimetro.
Una vez colocada la probeta en el banco de pruebas, se requiere de un sistema de medición en el cual se puedan visualizar los resultados que se van obteniendo de las pruebas, de ser necesario, guardarlos para aplicaciones posteriores. Estas primeras pruebas se realizan para determinar las frecuencias naturales de las vigas.
4.1.3 Sistema de medición para excitación por impulso.
Considerando el esquema mostrado en la figura 3.12, el sistema de medición de setiales representado a bloques para excitación por impulso, es como se muestra en la figura 4.3.
Figura 4.3 Diagrama a bloques del sistema de medicidn para excitacidn por impulso.
Las partes componentes del sistema de medición que se muestra en el diagrama a bloques de la figura 4.3 se especifican en el apéndice D.
Este sistema de medición puede variar en cuanto a los componentes que lo forman, ya que algunos de los elementos del sistema de medición que se muestran en la figura 4.3 se pueden cambiar por otros mas baratos, portátiles y de uso mas rápido, como por ejemplo un osciloscopio en lugar de los elementos 5 y 6 de la figura 4.4; de igual manera los acelerómetros pueden variar de tipo [1,2].
Para el sistema mostrado en la figura 4.4, la configuración del software del analizador de setiales, se realizó de manera tal que los gráficos desplegados fueran los obtenidos de las funciones frequency response (gráfica de inertancia
4-4
[g/N] contra frecuencia [Hz]), y power spectrum (gráfica de aceleración [g] contra frecuencia [Hz]).
Con las vigas colocadas sobre el banco de pruebas y el sistema de medición funcionando se pueden obtener experimentalmente las frecuencias naturales de las vigas para sus diferentes designaciones. Este es el caso que ocupa a la sección 4.2.
4.2 Frecuencias naturales de las vigas
Conociendo las características y propiedades físicas de las vigas con que se llevará a cabo el experimento, como primer paso en la caracterización de estos elementos y de cualquier estudio de vibración se procede a encontrar las frecuencias naturales [5].
Las frecuencias naturales se obtuvieron principalmente mediante dos métodos, uno analítico con las ecuaciones de Euler para vigas y otro experimental de acuerdo a las funciones frequency response y power spectrum del analizador de señales HP 3566A.
4.2.1 Método analítico
Para el método analitico, se consideró el caso en que R e s una constante y de acuerdo a la ecuación diferencial de vibraciones laterales de vigas uniformes de Euler-Bernoulli se tiene que [6]:
en donde: E módulo de Young [N/m2], I momento de inercia [m4], p masa por unidad de longitud de la viga [kglm], wfrecuencia [radlseg], x e y coordenadas.
Sustituyendo p 4 =p- -
El
obtenemos la ecuación diferencial de cuarto orden
d 4 Y - P 4 Y Y = O
para la vibración de una viga uniforme. La solución general de la ecuación (4.3) es [6]:
y = A coshp x + Bsenh ,B x + Ccosp x + Dsen p x
(4.2)
(4.3)
(4.4)
4-5

Para llegar a ese resultado se propone una solución de la forma: y=eax, que
a=kp, y a=@
e*Px=coshpx t senhp x
satisface la ecuación diferencial cuando [6]
Como
e*rpx- -cosp x _+ isenp x
La solución en la forma (4.4) se establece inmediatamente. Las condiciones de borde para una viga en voladizo (ver figura 2.2) son:
En x=o (punto de empotramiento): PO, - dY = O dw
d2Y - d3Y En x=l (extremo libre): - - O , -. = O dx2 dx3
Sustituyendo las condiciones de borde en la solución general se obtiene:
(y)X+A+C=O, . :A=-C
(2) =p [Asenhpx + Bcosbpx - Csenpx + Dcospx],=0=0 1.0
p[B+D]=O, ... B=-D
(2) = p 2 [ A c o s b p / + 6 ~ e n h p / - Ccosp/-Dsenpll=O r=l
A (cosh p/ + cos pl) + 6 (senh p / + sen pl)=O
[ 2) =p3 [Asen pi + Bcos p/ + Csen pl- Dcos pll=O I d
A (senh p / - sen pl) + B (cosh pl + cos pl)=O
Obteniendo a partir de estas ecs. una ec. que se satisface para un numero de valores correspondientes a cada modo normal de oscilación [6]:
cosh z cos z + I = O (4.5)
donde z=p/, y La ecuación 4.5 se resuelve gráficamente para los primeros 10 valores de z;
en la figura 4.4 se presenta la gráfica que proporciona el primer valor de z, el resto de las gráficas se muestran en el apéndice C.
I es la longitud libre de la viga.
4-6
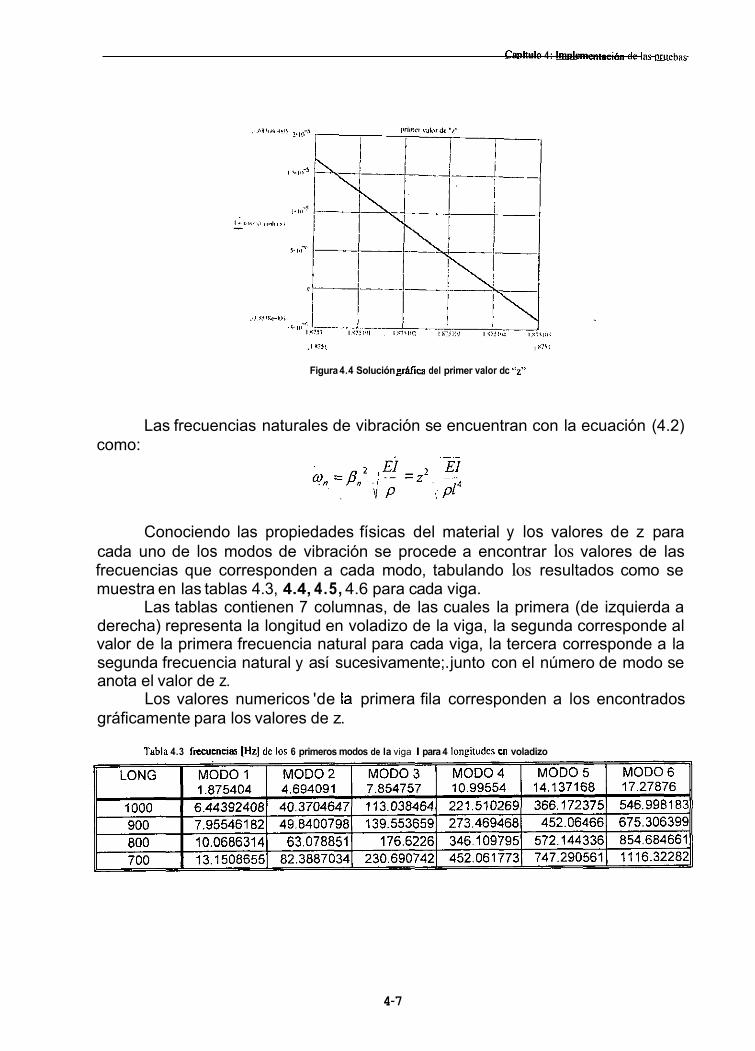
Caullulo 4: lmulcmentación dc 1% muchas
.I I% , h:,V
Figura 4.4 Solución grifica del primer valor dc Y'
Las frecuencias naturales de vibración se encuentran con la ecuación (4.2) como:
Conociendo las propiedades físicas del material y los valores de z para cada uno de los modos de vibración se procede a encontrar los valores de las frecuencias que corresponden a cada modo, tabulando los resultados como se muestra en las tablas 4.3, 4.4, 4.5, 4.6 para cada viga.
Las tablas contienen 7 columnas, de las cuales la primera (de izquierda a derecha) representa la longitud en voladizo de la viga, la segunda corresponde al valor de la primera frecuencia natural para cada viga, la tercera corresponde a la segunda frecuencia natural y así sucesivamente;. junto con el número de modo se anota el valor de z.
Los valores numericos 'de la primera fila corresponden a los encontrados gráficamente para los valores de z.
Tabla 4.3 frecuenciar [Hz] de los 6 primeros modos de la viga I para 4 longiludcs cn voladizo
4-7

Caoitulo 4' Imolcmentaci6n dc las oruebas.
long
1 O00 900 800
MODO1 M O D 0 2 MODO3 MODO4 MODO5 MODO5 1.875404 4.694091 7.854757 10.99554 14.137168 17.27876 12.8878482 80.7409293 226.076928 443.020538 732.34475 1093.99637 15.91 09236 99.6801 596 279.10731 8 546.938936 904.129321 1350.6128 20.1372627 126.157702 353.245199 692.21959 1144.28867 1709.36932
Tabla 4.5 Frecuencias [Hzl de los 6 primeros modos de la viga 3 pua 3 longitudes libres
27.1895531 170.339
Tabla 4.6 Frecuencias [Hz] de los 6 primeros modos de la viga 4 para 4 longitudes libres
Ii0"cl I MODO 1 MODO2 MODO3 MODO4 MODO5 MODO68
900 800 700
1875404 4694091 7854757 1099554 14 137168 1727876 I 158245546 991390674 277 592244 543969995 89922145 134328129 I -1000 17.4739654 109.472441 306.525989 600.668586 992.94829 1483.29297 22.1154874 138.551059 387.946955 760.22118 1256.70018 1877.29267 28.8855346 180.964648 506.706227 992.941949 1641.40432 2451.9741
4.2.2 Método experimental
En el método experimental, las frecuencias fueron obtenidas mediante las funciones frequency response y power spectrum del analizador de setiales HP 3566A.
La función frequency response grafica frecuencia [Hz] vs inertancia [glN]. La función power spectrum grafica frecuencia [Hz] vs aceleración [gr.
En este punto no son relevantes las amplitudes que se puedan presentar para las frecuencias de los modos de vibración, ya que al realizarse los impactos manualmente mediante el martillo de impacto KISTLER modelo 9722a, no se tiene control adecuado en la magnitud de la fuerza aplicada.
La importancia de las gráficas obtenidas de estas funciones está en determinar la posición donde se presentan los picos con respecto del eje de frecuencia, ya que ese valor de frecuencia se relacionará con un número de modo, incrementando el número del modo progresivamente, dependiendo del orden ascendente en que van apareciendo los picos de la curva con respecto del eje de frecuencia (ver sección 5.1 .I).
'1.8 nomenclaiura [g] ya se ha utilizado previamcnle en el capitulo 2, pero no SE habla explicado a que obedece SU uso y que represenla. El uso de esla designacibn obedece a quc el rango de opcracidn de 10s aceler6melros ticnc csla unidad [g]. además de la gráficas que se obiimcn visualmcnte en l a panialla de la computadora HP486DX, con el soñware del analizador HP3566A se preparan dc mantra quc el eje de las ordenadas tenga unidades en [g]; asi que por simplificacibn dc operaci6n los v d o m de aceleraci6n contenidos en W e irnbajo eslan en Is]. Pero dcbc iencrsc en c u m a que este valor correspondc al valor constanti dc 9.81 [ds'].
4-8
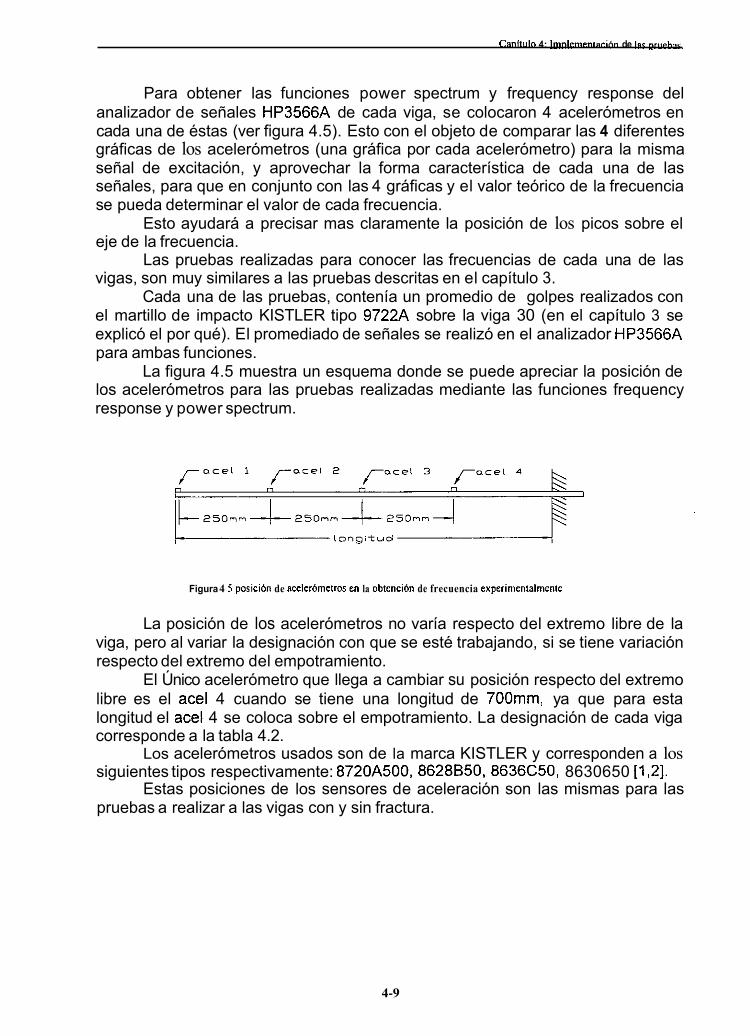
Canllulo 4: Imolcmeniaci0n de Iss Drucbas.
Para obtener las funciones power spectrum y frequency response del analizador de señales HP3566A de cada viga, se colocaron 4 acelerómetros en cada una de éstas (ver figura 4.5). Esto con el objeto de comparar las 4 diferentes gráficas de los acelerómetros (una gráfica por cada acelerómetro) para la misma señal de excitación, y aprovechar la forma característica de cada una de las señales, para que en conjunto con las 4 gráficas y el valor teórico de la frecuencia se pueda determinar el valor de cada frecuencia.
Esto ayudará a precisar mas claramente la posición de los picos sobre el eje de la frecuencia.
Las pruebas realizadas para conocer las frecuencias de cada una de las vigas, son muy similares a las pruebas descritas en el capítulo 3.
Cada una de las pruebas, contenía un promedio de golpes realizados con el martillo de impacto KISTLER tipo 9722A sobre la viga 30 (en el capítulo 3 se explicó el por qué). El promediado de señales se realizó en el analizador HP3566A para ambas funciones.
La figura 4.5 muestra un esquema donde se puede apreciar la posición de los acelerómetros para las pruebas realizadas mediante las funciones frequency response y power spectrum.
Figura 4 5 posici6n de acclerbmelros en la oblenci6n de frecuencia experimcntalmente
La posición de los acelerómetros no varía respecto del extremo libre de la viga, pero al variar la designación con que se esté trabajando, si se tiene variación respecto del extremo del empotramiento.
El Único acelerómetro que llega a cambiar su posición respecto del extremo libre es el ace1 4 cuando se tiene una longitud de 700mm, ya que para esta longitud el ace1 4 se coloca sobre el empotramiento. La designación de cada viga corresponde a la tabla 4.2.
Los acelerómetros usados son de la marca KISTLER y corresponden a los siguientes tipos respectivamente: 8720A500, 8628B50, 8636C50, 8630650 [ I ,2].
Estas posiciones de los sensores de aceleración son las mismas para las pruebas a realizar a las vigas con y sin fractura.
4-9

La figura 4.6 muestra un ejemplo de la función frequency response y la figura 4.7 muestra un ejemplo de la función power spectrum. Estas gráficas se obtuvieron de las pruebas realizadas a la viga designada como 2x900 sin fractura; el resto de las gráficas para las demás vigas y designaciones muestran en [7].
FR nga 2x900 SF awl 3 iiiL1 iol;ri I S 2
SO015 g O01
: O01 c O 005
c
- - O 005
O 500 1000 1500 O 500 1000 1500 O
hecuenua [Hz] lrecuenua [Hr]
a w l 1
$10 -I
Figura 4.6 Valores experimentales de las frecuencias obtenidas mediantefiequekcy responre.
PS viga 2x900 SF
x 10-8 ace 3 I ( 1 i;Ii , , 1
- 8 a2
500 1000 1500 O O
frecuencia [HL]
ace1 1
3 ace 4
500 1000 1500 frecuencia IHzl
i : : 1 c 0.06
500 1000 1500
5 a 0.02
O O
frecuencia [Hzl I
Figura 4.1 Valorcr expcrimenlalcs de las frecuencias obtenidas rnediantepowerspeclmm.
4-10
Como se puede ver en las gráficas 4.6 y 4.7 la posición sobre el e,e de la frecuencia donde aparecen 10s picos .es la misma para ambas funciones y los acelerómetros, Pero el CaraCter de cada uno es diferente, por lo cual se utilizan las gráficas de cada función, además de los cálculos teóricos para establecer los valores de las frecuencias naturales de la viga.
Por ejemplo, Si se considera la sefiai del acelerómetro 4 de la figura 4.6, el Pico correspondiente a la Primera frecuencia es menos visible que para los otros 3 acelerómetros. De igual manera para la figura 4.7 en el acelerómetro 4 el pico de la primera frecuencia casi no se aprecia (se muestra solamente como un punto cerca de la intersección de los ejes), mientras en los otros 3 acelerómetros si se puede observar con claridad.
También, como puede verse en las figuras 4.6 y 4.7, conforme crece el eje de frecuencia, aumenta la dificultad para precisar el valor de los picos; en muchos de 10s casos analizados solo puede hacerse aumentando una región de interés en las gráficas (ver sección 5.1.1).
A causa de estas variaciones en los caracteres de cada una de las señales, es que'se tienen que usar todas las señales para obtener el valor correspondiente de las frecuencias naturales de la viga.
Para las vigas con incisión, únicamente se uso el método experimental, utilizando ambas funciones (power spectrum y frequency response) para la determinación de las frecuencias naturales, y teniendo las mismas consideraciones que para la viga sin fractura.
Los acelerómetros con que se realizan las mediciones, así como su ubicación respecto del extremo libre de la viga, son los mismos que para las vigas sin incisión, obteniéndose gráficas similares a las presentadas en esta sección y CUYOS resultados y análisis se presentan en el Capitulo 5.
Se puede mencionar a manera de introducción que existen cambios en algunas gráficas para la posicion de los picos que representan el tercer, cuarto, quinto y sexto modo de vibración de las vigas sin fractura, Con respecto de 10s picos obtenidos para una con fractura.
Tablas comparativas de cambios en los valores de frecuencia se muestran en el apéndice E.
En este punto ya se conocen todos 10s elementos con 10s que se realizarán las pruebas, las probetas para la experimentación (vigas) y las frecuencias a las cuales se excitarán cada uno de los modos de vibración mediante el excitador electromagnético LDS V400.
EI siguiente paso es preparar y elaborar el sistema que Permita tener listos todos los elementos necesarios para llevar a cabo las pruebas. Esto se desarrolla en las siguientes secciones de este capítulo, considerando todas las condiciones de las probetas bajo las cuales se realizará la prueba.
4-1 1
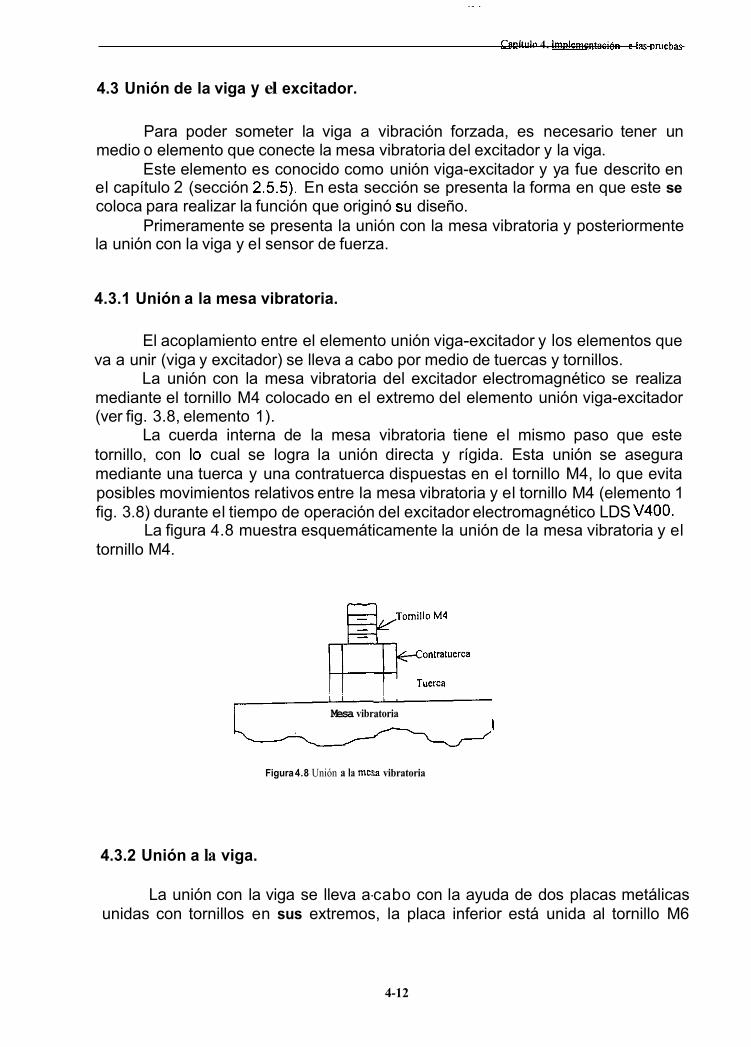
.. .
Cariltulo 4. lmolementac~6n c la rinicba
4.3 Unión de la viga y el excitador.
Para poder someter la viga a vibración forzada, es necesario tener un medio o elemento que conecte la mesa vibratoria del excitador y la viga.
Este elemento es conocido como unión viga-excitador y ya fue descrito en el capítulo 2 (sección 2.5.5). En esta sección se presenta la forma en que este se coloca para realizar la función que originó su diseño.
Primeramente se presenta la unión con la mesa vibratoria y posteriormente la unión con la viga y el sensor de fuerza.
4.3.1 Unión a la mesa vibratoria.
El acoplamiento entre el elemento unión viga-excitador y los elementos que va a unir (viga y excitador) se lleva a cabo por medio de tuercas y tornillos.
La unión con la mesa vibratoria del excitador electromagnético se realiza mediante el tornillo M4 colocado en el extremo del elemento unión viga-excitador (ver fig. 3.8, elemento 1).
La cuerda interna de la mesa vibratoria tiene el mismo paso que este tornillo, con Io cual se logra la unión directa y rígida. Esta unión se asegura mediante una tuerca y una contratuerca dispuestas en el tornillo M4, lo que evita posibles movimientos relativos entre la mesa vibratoria y el tornillo M4 (elemento 1 fig. 3.8) durante el tiempo de operación del excitador electromagnético LDS V400.
La figura 4.8 muestra esquemáticamente la unión de la mesa vibratoria y el tornillo M4.
Tucrca
Mesa vibratoria I
Figura 4.8 Unión a la mesa vibratoria
4.3.2 Unión a la viga.
La unión con la viga se lleva a-cabo con la ayuda de dos placas metálicas unidas con tornillos en sus extremos, la placa inferior está unida al tornillo M6
4-12
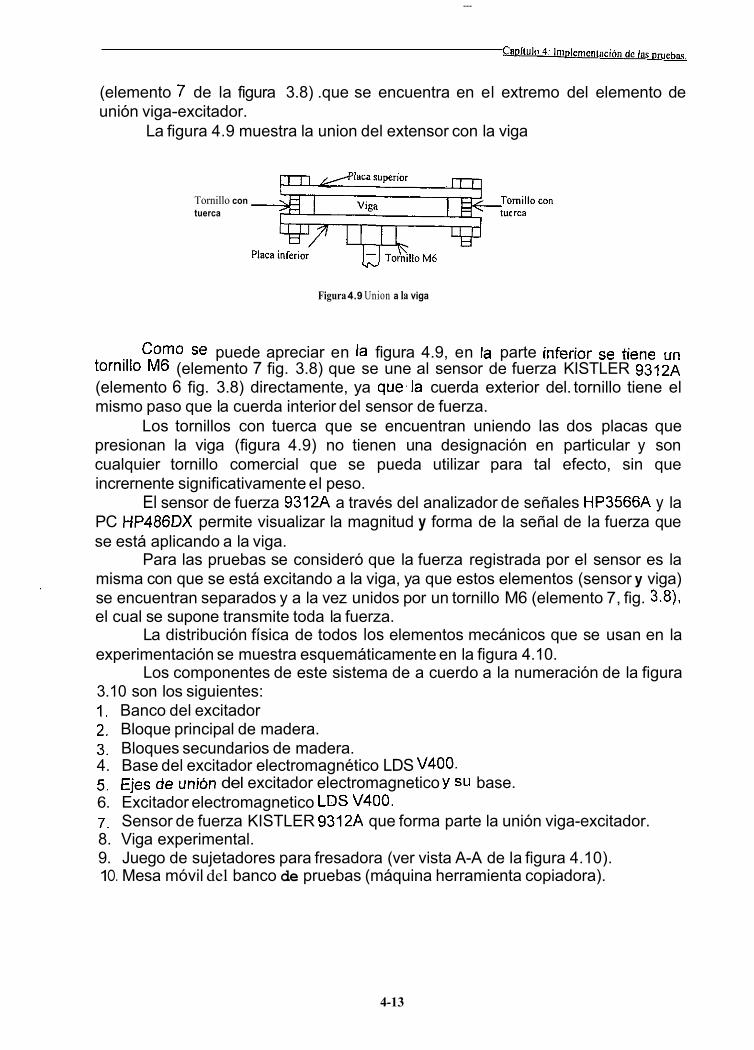
...
(elemento 7 de la figura 3.8) .que se encuentra en el extremo del elemento de unión viga-excitador.
La figura 4.9 muestra la union del extensor con la viga
Tornillo con millocon tuerca rca
Figura 4.9 Union a la viga
Como se puede apreciar en la figura 4.9, en la parte inferior se tiene un tornillo M6 (elemento 7 fig. 3.8) que se une al sensor de fuerza KISTLER 9312A (elemento 6 fig. 3.8) directamente, ya que'la cuerda exterior del. tornillo tiene el mismo paso que la cuerda interior del sensor de fuerza.
Los tornillos con tuerca que se encuentran uniendo las dos placas que presionan la viga (figura 4.9) no tienen una designación en particular y son cualquier tornillo comercial que se pueda utilizar para tal efecto, sin que incrernente significativamente el peso.
El sensor de fuerza 9312A a través del analizador de señales HP3566A y la PC HP486DX permite visualizar la magnitud y forma de la señal de la fuerza que se está aplicando a la viga.
Para las pruebas se consideró que la fuerza registrada por el sensor es la misma con que se está excitando a la viga, ya que estos elementos (sensor y viga) se encuentran separados y a la vez unidos por un tornillo M6 (elemento 7, fig. 3.8), el cual se supone transmite toda la fuerza.
La distribución física de todos los elementos mecánicos que se usan en la experimentación se muestra esquemáticamente en la figura 4.10.
Los componentes de este sistema de a cuerdo a la numeración de la figura 3.10 son los siguientes: 1, Banco del excitador 2. Bloque principal de madera. 3. Bloques secundarios de madera. 4. Base del excitador electromagnético LDS V400. 5. Ejes de unión del excitador electromagnetico Y SU base. 6. Excitador electromagnetico LDS W O O . 7. Sensor de fuerza KISTLER 9312A que forma parte la unión viga-excitador. 8. Viga experimental. 9. Juego de sujetadores para fresadora (ver vista A-A de la figura 4.10). 1 O. Mesa móvil del banco de pruebas (máquina herramienta copiadora).
4-13
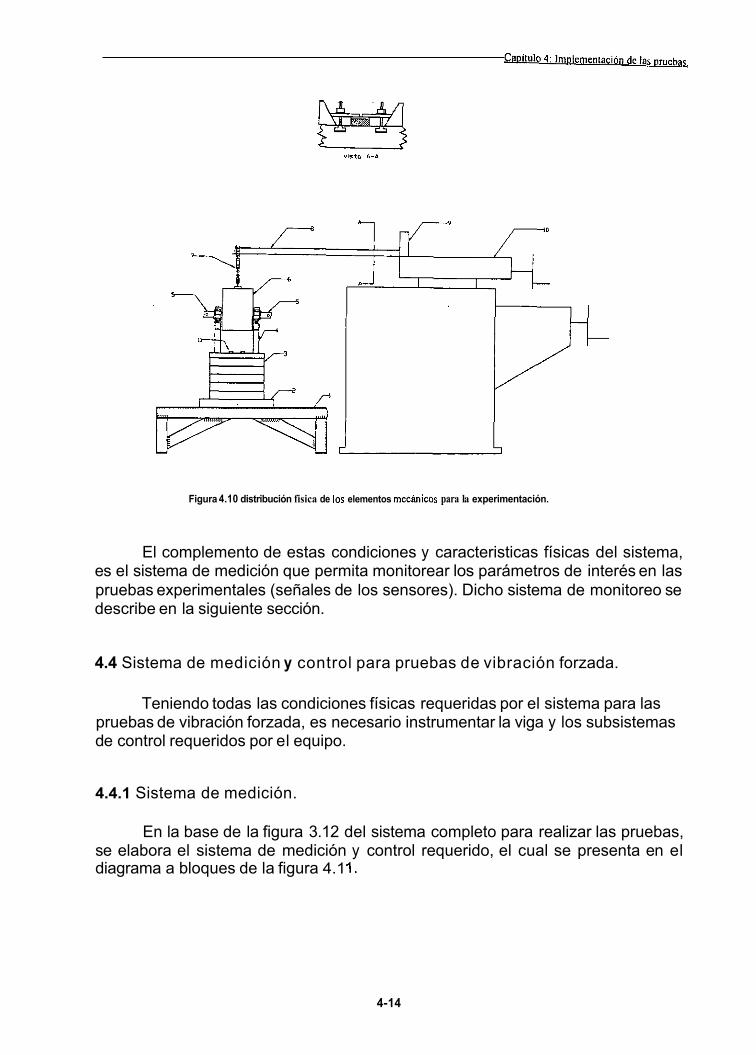
Figura 4.10 distribución fisica de los elementos mechicos para la experimentación.
El complemento de estas condiciones y caracteristicas físicas del sistema, es el sistema de medición que permita monitorear los parámetros de interés en las pruebas experimentales (señales de los sensores). Dicho sistema de monitoreo se describe en la siguiente sección.
4.4 Sistema de medición y control para pruebas de vibración forzada.
Teniendo todas las condiciones físicas requeridas por el sistema para las pruebas de vibración forzada, es necesario instrumentar la viga y los subsistemas de control requeridos por el equipo.
4.4.1 Sistema de medición.
En la base de la figura 3.12 del sistema completo para realizar las pruebas, se elabora el sistema de medición y control requerido, el cual se presenta en el diagrama a bloques de la figura 4.1 I.
4-14
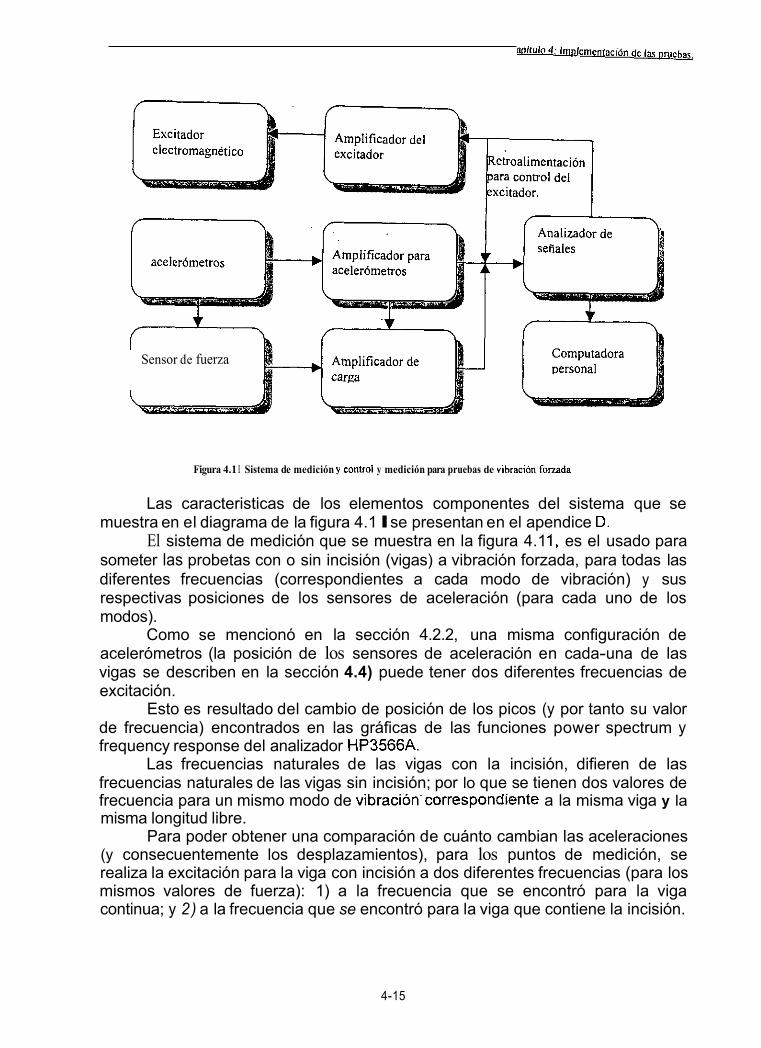
Sensor de fuerza
Figura 4.1 I Sistema de medición y control y medición para pruebas de vibracidn fomda
Las caracteristicas de los elementos componentes del sistema que se muestra en el diagrama de la figura 4.1 I se presentan en el apendice D.
El sistema de medición que se muestra en la figura 4.1 1, es el usado para someter las probetas con o sin incisión (vigas) a vibración forzada, para todas las diferentes frecuencias (correspondientes a cada modo de vibración) y sus respectivas posiciones de los sensores de aceleración (para cada uno de los modos).
Como se mencionó en la sección 4.2.2, una misma configuración de ~~ ~ ~
acelerómetros (la posición de los sensores de aceleración en cada-una de las vigas se describen en la sección 4.4) puede tener dos diferentes frecuencias de excitación.
Esto es resultado del cambio de posición de los picos (y por tanto su valor de frecuencia) encontrados en las gráficas de las funciones power spectrum y frequency response del analizador HP3566A.
Las frecuencias naturales de las vigas con la incisión, difieren de las frecuencias naturales de las vigas sin incisión; por lo que se tienen dos valores de frecuencia para un mismo modo de vibración.correspondiente a la misma viga y la misma longitud libre.
Para poder obtener una comparación de cuánto cambian las aceleraciones (y consecuentemente los desplazamientos), para los puntos de medición, se realiza la excitación para la viga con incisión a dos diferentes frecuencias (para los mismos valores de fuerza): 1) a la frecuencia que se encontró para la viga continua; y 2) a la frecuencia que se encontró para la viga que contiene la incisión.
4-15
La posición de los sensores de aceleración es la misma (si se trata del mismo modo) para ambas frecuencias. La comparación de estos valores se expone en el capítulo 4.
Dentro del sistema de medición, también se incluye la medición de la fuerza; tema que ocupa la sección 4.3.2.
4.4.2 Fuerza de excitación
La señal de fuerza de excitación, como se puede observar en el diagrama a bloques de la figura 4.11, fue registrada con el sensor de fuerza marca KISTLER 9312A.
Para la fuerza de excitacion con que se llevaron a cabo las pruebas, se trató de obtener un valor de fuerza que fuera del mismo para todos los modos de vibración y todas las longitudes de viga.
Esta cualidad deseable no fue posible obtenerla en todos los casos, a causa de características propias de diseño del excitador electromagnético, ya que a pesar de tener un intervalo de operación de 5Hz a 9000Hz no fue posible obtener en todos los casos una señal adecuada a los requerimientos por debajo de los 20Hz, ya que en éste intervalo su respuesta de corriente y voltaje no es lineal. La curva de corriente (que es función de la fuerza) mostrada en [8] puede considerarse lineal de 70Hz hasta aproximadamente í200Hz (ver capítulo 3).
Basándose en lo explicado en el párrafo anterior no fue posible obtener una adecuada señal senoidal de fuerza para casi todas las vigas en su primer modo, y en algunas pocas frecuencias aisladas que se mencionarán en el capítulo 5.
Después de realizar varios ensayos de prueba con las vigas sometidas a vibración forzada, se obtuvieron dos valores de fuerza que podían lograrse para casi todas las diferentes frecuencias y longitudes de viga.
Los valores en común para casi todas las frecuencias son: 1 N y 5N, donde el primer valor es el mínimo para algunas frecuencias, que permite obtener una señal alterna senoidal; y el segundo valor es el que se puede lograr sin rebasar en algunas frecuencias la cantidad de corriente eléctrica permisible (6 amperes como máximo según el manual [8]).
Conociendo qué señales se desea medir y controlar, es necesario precisar en qué punto se van a llevar a cabo las mediciones; y este es el titulo de la sección 4.4.
4.5 Puntos de medición
Los puntos de medición donde fueron colocados los acelerómetros varían para cada longitud libre de la viga, dependiendo del modo que se desee excitar; de esta manera la posición de los acelerómetros cambia al variar la longitud libre ylo la frecuencia del correspondiente modo de excitación.
4-16
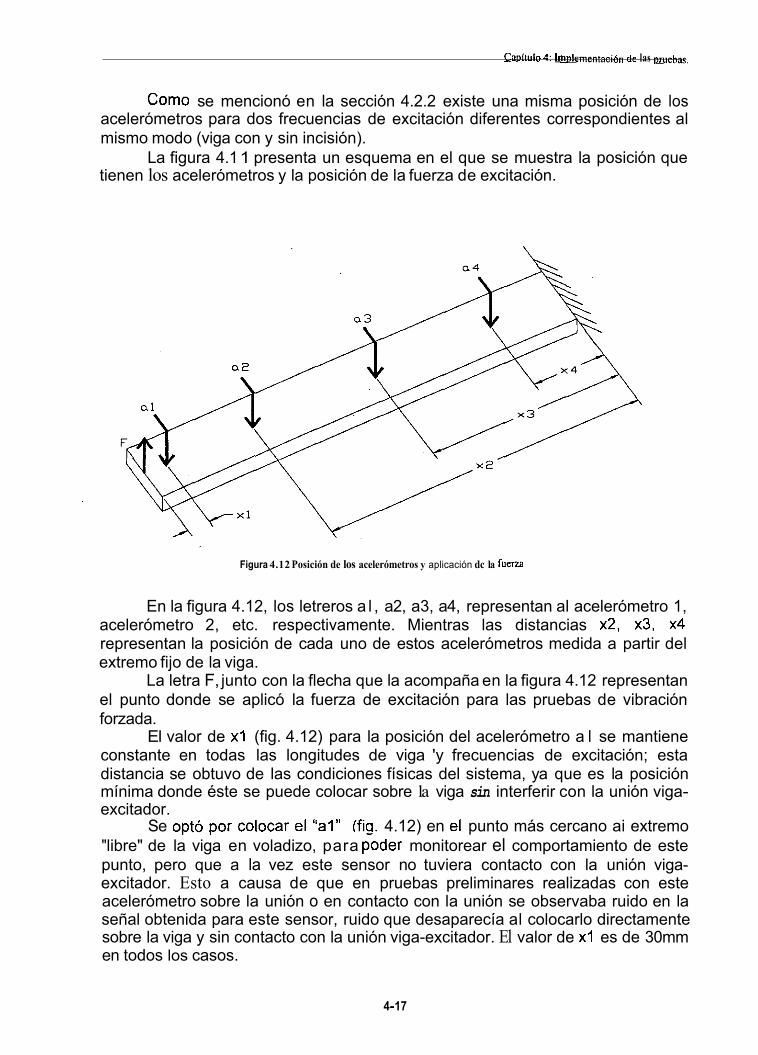
Caolrulo 4: lmolementación dc las omchas.
Como se mencionó en la sección 4.2.2 existe una misma posición de los acelerómetros para dos frecuencias de excitación diferentes correspondientes al mismo modo (viga con y sin incisión).
La figura 4.1 1 presenta un esquema en el que se muestra la posición que tienen los acelerómetros y la posición de la fuerza de excitación.
Figura 4.12 Posición de los acelerómetros y aplicación dc la fuem
En la figura 4.12, los letreros a l , a2, a3, a4, representan al acelerómetro 1, acelerómetro 2, etc. respectivamente. Mientras las distancias x2, x3, x4 representan la posición de cada uno de estos acelerómetros medida a partir del extremo fijo de la viga.
La letra F, junto con la flecha que la acompaña en la figura 4.12 representan el punto donde se aplicó la fuerza de excitación para las pruebas de vibración forzada.
El valor de XI (fig. 4.12) para la posición del acelerómetro a l se mantiene constante en todas las longitudes de viga 'y frecuencias de excitación; esta distancia se obtuvo de las condiciones físicas del sistema, ya que es la posición mínima donde éste se puede colocar sobre la viga sin interferir con la unión viga- excitador.
Se ootó Dor colocar el "a l " (fia. 4.12) en el punto más cercano ai extremo I ,
"libre" de la viga en voladizo, para poder monitorear el comportamiento de este punto, pero que a la vez este sensor no tuviera contacto con la unión viga- excitador. Esto a causa de que en pruebas preliminares realizadas con este acelerómetro sobre la unión o en contacto con la unión se observaba ruido en la señal obtenida para este sensor, ruido que desaparecía al colocarlo directamente sobre la viga y sin contacto con la unión viga-excitador. El valor de XI es de 30mm en todos los casos.
4-17
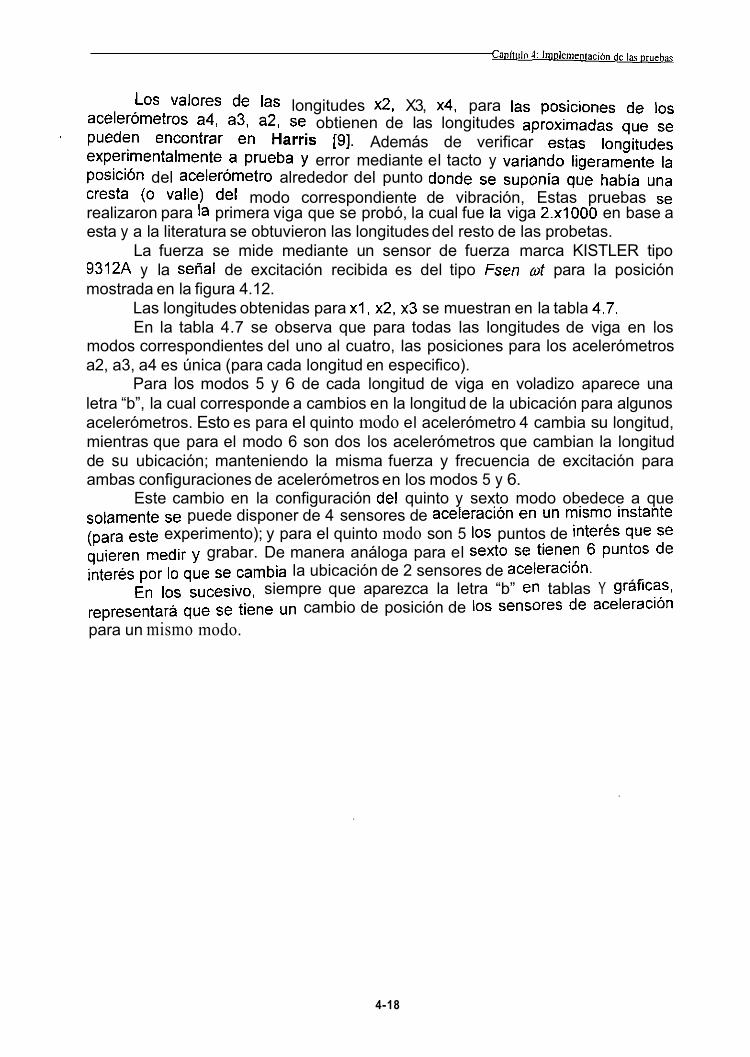
valoreS de 1% longitudes X2, X3, x4, para las posiciones de 10s acelerónletros a4, a3, a2, Se obtienen de las longitudes aproximadas que se
’ pueden encontrar en Harris PI. Además de verificar estas longitudes experimentalmente a prueba Y error mediante el tacto y variando ligeramente la Posición del aCelerómetr0 alrededor del punto donde se suponía que había una cresta (0 valle) del modo correspondiente de vibración, Estas pruebas se realizaron para la primera viga que se probó, la cual fue la viga 2.~1000 en base a esta y a la literatura se obtuvieron las longitudes del resto de las probetas.
La fuerza se mide mediante un sensor de fuerza marca KISTLER tipo 9312A y la sena1 de excitación recibida es del tipo Fsen of para la posición mostrada en la figura 4.12.
Las longitudes obtenidas para XI, x2, x3 se muestran en la tabla 4.7. En la tabla 4.7 se observa que para todas las longitudes de viga en los
modos correspondientes del uno al cuatro, las posiciones para los acelerómetros a2, a3, a4 es única (para cada longitud en especifico).
Para los modos 5 y 6 de cada longitud de viga en voladizo aparece una letra “b”, la cual corresponde a cambios en la longitud de la ubicación para algunos acelerómetros. Esto es para el quinto modo el acelerómetro 4 cambia su longitud, mientras que para el modo 6 son dos los acelerómetros que cambian la longitud de su ubicación; manteniendo la misma fuerza y frecuencia de excitación para ambas configuraciones de acelerómetros en los modos 5 y 6.
Este cambio en la configuración del quinto y sexto modo obedece a que solamente se puede disponer de 4 sensores de aceleración en un mismo instante (para este experimento); y para el quinto modo son 5 10s puntos de interés que se quieren medir y grabar. De manera análoga para el Sexto Se tienen 6 Puntos de interés por lo que se cambia la ubicación de 2 sensores de aceleración.
En los sucesivo, siempre que aparezca la letra “b” en tablas Y gráficas, representará que se tiene un cambio de posición de 10s sensores de aceleración para un mismo modo.
4-18

.. . ~.
Cadtulo 4: lmolementacidn de 18s oruebas.
Todas las consideraciones hechas para llevar a cabo el experimento han sido considerando las vigas con y sin incisión; pero aun no se ha definido la posición y profundidad que ésta tiene en cada una de las vigas sometidas a vibración forzada. La sección 4.5 proporciona la información relacionada con las incisiones.
4-19

Caoltulri 4: Irnrilcmcntaci0n dc las orucbas.
4.6 Posición de la incisión
La Posición donde fue practicada la incisión en las vigas después de realizadas las primeras pruebas sin fractura obedece a diversas causas, pero principalmente a la capacidad técnica para poder realizar estas incisiones.
La incisión fue practicada con un cortador de disco de 0.2mm de espesor y 25.4mm de diámetro, los cortadores fueron elegidos de los existentes comercialmente, así como el árbol del cual se sujetan. AI ser una herramienta comercial se tiene el inconveniente de que el árbol es de tipo estándar y con una longitud total en especifico.
El árbol mencionado en el párrafo anterior está diseñado para trabajar al aire (de un lado se coloca dentro de una boquilla de máquina fresadora y por el otro lado se monta el cortador quedando este último extremo en voladizo) y solamente permitía como máximo un corte en todo lo ancho de la viga a una distancia de 50 mm del extremo libre (corte realizado a la viga de menor espesor a una profundidad de 2 mm).
Para realizar otros cortes en las vigas se tuvo la necesidad de diseñar y maquinar un árbol de mayor longitud, pero con ciertas limitaciones que se presentaban; por ejemplo el pandeo de este al estar en operación (menos de 0.5mm de excentricidad del centro del cortador con respecto del centro del árbol en el punto donde se sujeta a la máquina fresadora), lográndose una distancia del corte de 270mm a partir del extremo libre de la viga. El dibujo correspondiente al árbol mencionado se encuentra en el apéndice A.
E[ corte realizado en cada viga se muestra en ia figura 4.13, así K X f I O la nomenclatura usada.
'
~igura 4.13 Ubicación dc 18 fractura en lar vifiar
La posición y profundidad de la fractura para cada designación de viga en particular se condensan en la tabla 4.8.
4-20
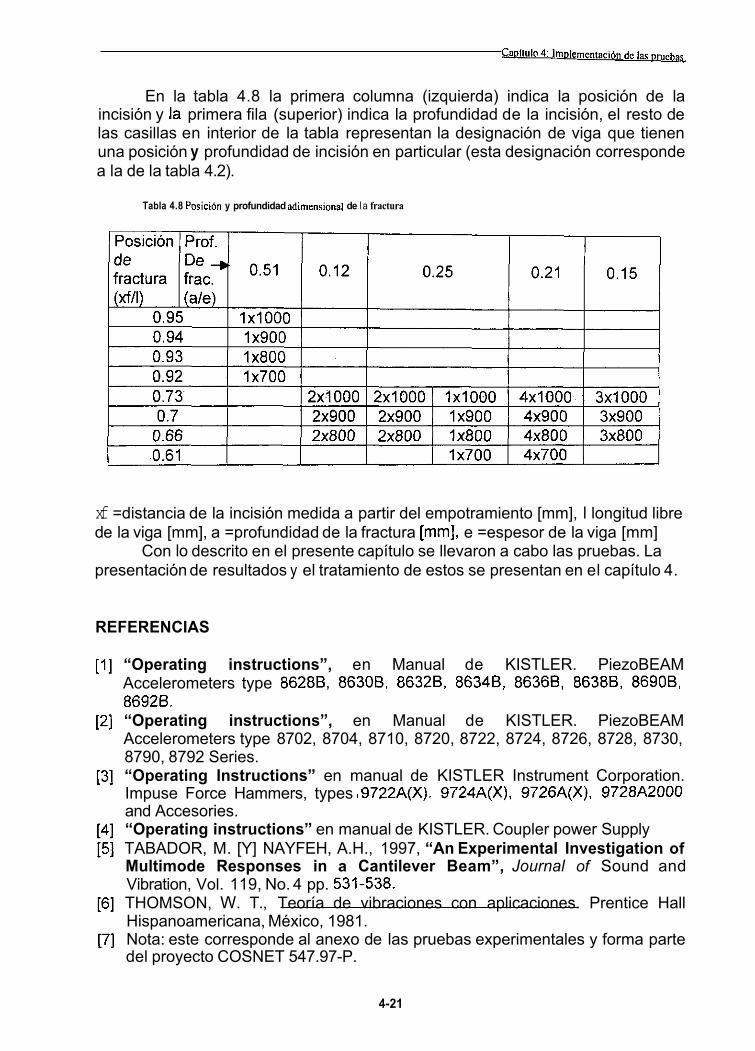
En la tabla 4.8 la primera columna (izquierda) indica la posición de la incisión y la primera fila (superior) indica la profundidad de la incisión, el resto de las casillas en interior de la tabla representan la designación de viga que tienen una posición y profundidad de incisión en particular (esta designación corresponde a la de la tabla 4.2).
Tabla 4.8 PosiciOn y profundidad adimensional de l a fractura
xf =distancia de la incisión medida a partir del empotramiento [mm], I longitud libre de la viga [mm], a =profundidad de la fractura [mm], e =espesor de la viga [mm]
Con lo descrito en el presente capítulo se llevaron a cabo las pruebas. La presentación de resultados y el tratamiento de estos se presentan en el capítulo 4.
REFERENCIAS
“Operating instructions”, en Manual de KISTLER. PiezoBEAM Accelerometers type 8628B, 8630B, 8632B, 8634B, 8636B, 86386 8690B, 86928. “Operating instructions”, en Manual de KISTLER. PiezoBEAM Accelerometers type 8702, 8704, 8710, 8720, 8722, 8724, 8726, 8728, 8730, 8790, 8792 Series. “Operating Instructions” en manual de KISTLER Instrument Corporation. Impuse Force Hammers, types I 9722A(X). 9724A(X), 9726A(X), 9728A2000 and Accesories. “Operating instructions” en manual de KISTLER. Coupler power Supply TABADOR, M. [Y] NAYFEH, A.H., 1997, “An Experimental Investigation of Multimode Responses in a Cantilever Beam”, Journal of Sound and Vibration, Vol. 119, No. 4 pp. 531-538. THOMSON, W. T., Teoría de vibraciones con aplicaciones. Prentice Hall Hispanoamericana, México, 1981. Nota: este corresponde al anexo de las pruebas experimentales y forma parte del proyecto COSNET 547.97-P.
4-21

Caniiuio 4: ImDlernenIacibn dc las mcbas .
[SI “User Manual” en manual LDS. Installation and operating Manual, V400 series vibrators, Manual Number 936221,
[9] HARRIS, C. [Y] CREDE, C., 1961, “Shock and Vibration Handbook”, Vol 2, Mc Graw Hill., E.U.
4-22
CaDliuio I: Presentaci6n dc resultados.
Capítulo 5
Presentación de resultados
En este capítulo se presentan algunos gráficos de los resultados obtenidos del experimento. Se discute y analiza los cambios en la forma de las gráficas obtenidas de las funciones del analizador de seílales HP 3566A.
También se analiza la variación en los desplazamientos que registran los sensores de aceleración al someter la viga con y sin fractura a la misma frecuencia de excitación, que corresponde a la frecuencia natural de la viga sin fractura.
Se presentan algunos ejemplos de gráficos representativos de las pruebas experimentales realizadas, grabados en dominio del tiempo y algunos grabados en dominio de la frecuencia.
5.1 Presentación de resultados.
Las señales obtenidas durante la experimentación, se digitalizaron en el analizador de seílales HP 3566A y se grabaron en la PC HP486DX, para su almacenamiento y su análisis posterior.
Para la presentación del análisis de los resultados, este se realizará en dos partes: un análisis cualitativo y otro cuantitativo.
En el análisis cualitativo se presentarán gráficas representativas de algunas longitudes de viga que permitan observar el cambio, tanto del desplazamiento de los puntos de medición, como el cambio de las frecuencias naturales de las vigas,
5-1
Caoiiiilo 5: Prcseniaci611 dc rcsulindos.
para las mediciones realizadas a la viga cuando ésta no tenia la discontinuidad, Y las mediciones cuando se presentaba alguna incisión en la viga.
En la parte cuantitativa se presentan a manera de ejemplo algunas tablas numéricas comparativas del cambio encontrado en los valores de las señales para las vigas con y sin incisión.
Se presentan también representativamente valores de algunos datos estadísticos obtenidos de las señales medidas y se explica cómo se obtuvieron las gráficas de desplazamiento a partir de las señales de aceleración.
Resulta conveniente en el desarrollo de este capítulo estar familiarizado con las designaciones dadas a cada una de las vigas y las longitudes en voladizo que cada una de ellas tiene. También es recomendable el conocer los puntos de medición que los acelerómetros tienen en cada prueba para cada uno de los modos de vibración.
La información requerida que se enuncia en el párrafo anterior se encuentra contenida en el capitulo 4 (secciones 4.1 .I, 4.4 y 4.54, y esta ordenada en tablas de manera que la consulta de cualquier dato de longitud de viga y/o posición de sensores sea rápida.
5.1.1 Análisis cualitativo.
En esta sección se muestran gráficas que ejemplifiquen los resultados obtenidos de las pruebas experimentales. Por ejemplo, la obtención 'de frecuencias naturales experimentalmente para una viga con tres diferentes profundidades de incisión (sin incisión y las dos incisiones correspondientes a la viga 2x900, ver tabla 4.8).
Se realizan las observaciones que se juzgan necesarias y se hace una discusión acerca de estos resultados que se muestran.
Por cuestiones de espacio y estetica, el juego completo de los resultados obtenidos no puede ser incluido en el cuerpo de esta tesis o en algún apéndice; por Io que el total de los resultados se encuentra en [I] disponible en la biblioteca del Departamento de Ingeniería Mecánica del cenidet.
Como se menciona al principio de este capítulo aquí solo se presentan algunas gráficas representativas y un condensado de los valores numéricos que se obtuvieron.
Para el análisis cualitativo se presentan graficas de:
-El cambio de frecuencia natural, para la viga sin fractura y la frecuencia obtenida posteriormente cuando la viga contiene una incisión.
En la figura 5.1 se presenta la comparación de tres diferentes curvas obtenidas de la misma viga (viga 2x900); para las mediciones realizadas a la viga sin incisión y para dos incisiones de diferente profundidad (a/e= 0.25 y a/e=0.12)*.
Lu designaci6n dc viga, si como la nomenclatura usada para especificar la profundidad dc la fractura se cncucnlrm descritas cn el capliulo3. Scccioncs3.1.1 y 3 3
5-2

viga 2x900
500 1 O00 1500 frecuencia iHzl
Figura 5.1 ComparaciOn de las tres curvas de frecuenciaobtenida para la viga 2x900. La linea continua representa la seaal correspondiente a la viga sin fractura; la linea de punto y trazo C.-.) representa la curva
obtenida para una inc i r ih de d e 4 . 1 2 de profundidad y x j l 4 . 7 de distancia a panir del punto de empotramiento (ver capitulo 4 para la simbologla); y la curva restante (-) representa la renal obtenida para una inciri6n dc o/e=O.25 de
profundidad y a una dislancia dcx//l=0.7.
La figura 5.1 presenta un sobremontaje de tres señales obtenidas para la viga 2x900 con cada una de las curvas teniendo la linea que se indica a continuación:
A causa del número de puntos digitalizados tomados del analizador de setiales HP3566A y al espacio de la gráfica en que se presentan este número de puntos (1600 puntos tomados para cada curva de la gráfica 5.1), no se logra apreciar en detalle cada una de las curvas; por lo que la figura 5.2 presenta porciones aumentadas de la grafica 5.1, donde pueden apreciarse claramente cada una de las curvas.
AI observar la figura 5.1 se pueden ver diferencias entre las curvas obtenidas para cada una de las diferentes incisiones (sin precisar en éste momento qué curva pertenece a qué prueba).
Como se puede observar a grandes rasgos, las tres curvas tienen la misma posición para los dos primeros picos con respecto del eje horizontal (eje de frecuencia), Correspondientes a las dos primeras frecuencias naturales; pero a partir del tercer pico la posición para cada curva varía, cambiando con esto el valor de la frecuencia natural (frecuencias que se relacionan con el tercer modo de vibración y modos mayores).
5-3

. .
Cariliulo 5 : PreseniaciOn de resuliados.
Como se mencionó anteriormente, para una mejor apreciación de los cambios de posición respecto del eje de frecuencia presentes en los picos correspondientes a la 3a,4a, 5a y (porciones a, b, c y d de la figura 5.1) frecuencia natural de la viga 2x900, la figura 5.2 presenta una ampliación del las porciones de la figura 5.1 que contienen estos picos.
frecuencia IHzI
1 0.081
i -0.021 I
820 830 840 850 860 870 . frecuencialHzl---
I 51 O 520 530 540
_ _ - . frewenaa.lMzL
1 i 1290 1300 1310 1320 1330 1340 - frecuencia.ltlzlL -
Figura 5.2 Acercamienlos de la grafica 5.1, correspondienle a las frecuencias: 3' (superior izquierda), 4' (superior derccha), 5' (inferior izquierda) y 6' (inferior derecha).
La designación de cada tipo de línea para cada es la misma que para la figura 5.1. Es decir, la línea 1 corresponde a la línea de punto y trazo descrita para la figura 5.1 (.-.-); la línea 2 fig. 5.2 es la línea segmentada de la fig. 5.1 (--) y por último la línea 3 de la fig. 5.2 es la línea continua de la fig. 5.1.
AI observar la figura 5.1 y posteriormente la figura 5.2, se puede ver las diferencias entre las tres curvas obtenidas experimentalmente con el analizador de señales HP 3566A para las diferentes profundidades de la incisión. Las principales diferencias son: 1. La posición de los dos primeros picos con respecto del eje horizontal
(correspondientes a las dos primeras frecuencias naturales de la viga 2x900) para las tres diferentes curvas es la misma.
5-4

Canllulo 5 : PresentaciOn dc resuliada&
2. Para 10s Picos de las tres curvas que corresponden a la tercera, cuarta, quinta Y sexta frecuencias naturales, la posición de estos picos con respecto del eje de frecuencia ya no es la misma. Encontrándose que cuanto mayor es la fractura, la frecuencia disminuye en comparación con la de la viga sin fractura (generalmente así ocurre en todas las señales; pero la diferencia no es tan clara en todas). Las tablas comparativas de frecuencias para todas las vigas se encuentran en [I].
3. La señal de la curva correspondiente a la incisión de a/e=0.12 es la que más ruido (eléctrico y10 mecánico) presenta; por tanto, es la más difícil de precisar su valor de frecuencia.
4. Las amplitudes de los picos correspondientes a la señal obtenida para la viga sin fractura, siempre son menores que para el caso donde ya se presenta alguna incisión. Pero esto no debe ser considerado como un indicativo real, ya que al ser aplicada la excitación manualmente con el martillo de impacto KISTLER tipo 9722A, no se tenía un control preciso en el valor de la fuerza aplicada. Por ello no se garantiza que sea la misma para todas las pruebas.
5. -La forma de la señal de fuerza de excitación y el desfasamiento de ésta con respecto de la seiial de alimentación proveniente de la fuente y la señal del acelerómetro 1 (ver capítulo 4 para posición de ace1 1).
La figura 5.3 muestra tres curvas con sus valores reales representados en el eje vertical, correspondientes a la fuerza de excitación en [NI (línea 3), voltaje de alimentación de la fuente en M (línea 1) y la aceleración obtenida del acelerómetro I en [g] (línea 2) para la primera frecuencia natural (1G-z) de la viga 1 x900.
I 1xYuu. modo 1 I
I I . . -.~iernoo~si-. . - . .
Figura 5.3 Foma dc las senales de fuerza de excilaciiin, voltaje y aceleración del acelcr6mctro I
La figuras 5.4 y 5.5 muestran señales análogas a las que se presentan en la figura 5.3, pero para las frecuencias correspondientes al segundo y tercer modo de vibración de la viga 1x900 y para dos valores de fuerza diferentes (1 y 5N).
5-5

Caoliulo 5: Presentación dc rcsultados.
De forma similar que para la gráfica de la figura 5.3, las unidades del eje vertical de la figura 5.4 son [VI para la curva de voltaje (línea I ) , [g] para la señal de aceleración (línea 2) y [NI para la setial de fuerza (línea 3).
Figura 5.4 Forma de las seriales de fuerza de excitación. voltaje y aceleración del acelerómelro I , para e l segundo modo de cxcitacitm de la viga 2x900.
La grbfica del lado derecho corresponde a 5N de fuerza de excitación y 96 'Hz de excitación. La gráfica del lado izquierdo corresponde a I N dc fuerza de excitación y 96Hz.
La figura 5.5 muestra dos gráficas correspondientes al tercer modo de vibración de la viga 1x900. La primera gráfica representa señales obtenidas con una fuerza de excitación de 1 N y 268 Hz (izquierda) y la segunda (derecha) para una fuerza de excitación de 5 N y 268 Hz.
Las unidades del eje vertical son [g] para la curva de aceleración (linea I ) , M para al curva de voltaje (línea 2) , y [NI para la curva de la señal de fuerza de excitación (línea 3).
1x900. modo 3 I
O o 02 o 04 Tiempo [SI
Figura 5.5 Forma dc las senales de fuerza de excilacitm (linea3). vollaje de la fuente (linea 2) y acelcracitm registrada por el ~celer6meIro I (linea I ) .
5-6
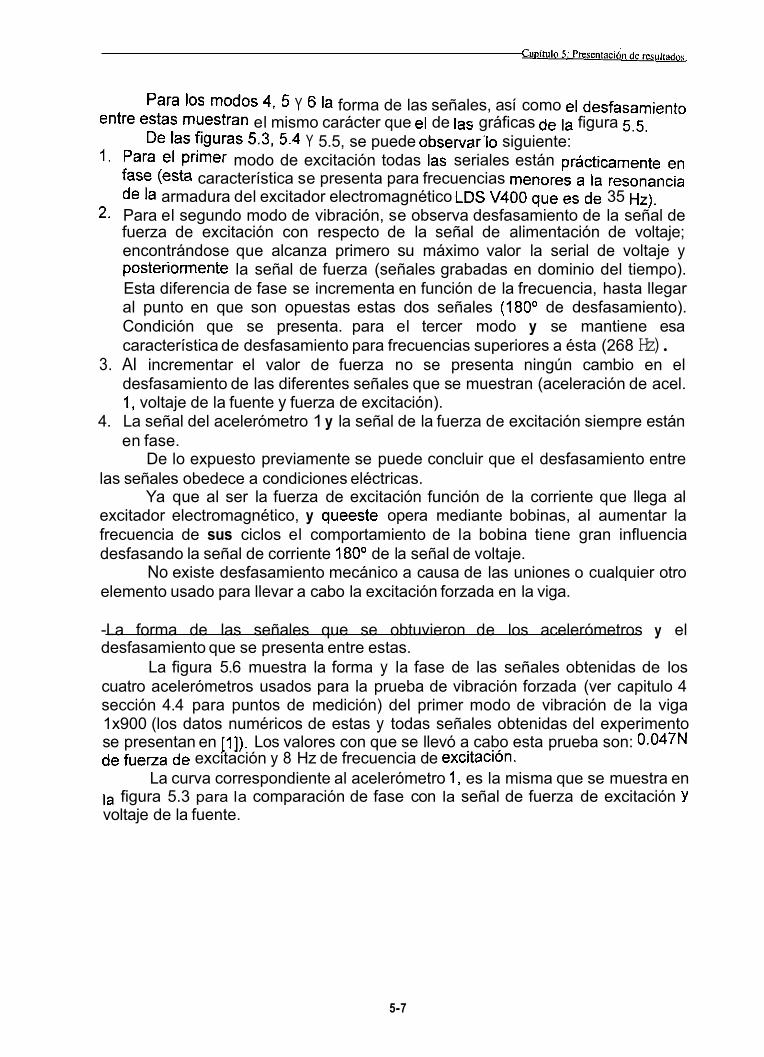
Para los modos 4, 5 Y 6 la forma de las señales, así como el desfasamiento
De las figuras 5.3, 5.4 Y 5.5, se puede observar'lo siguiente: entre estas muestran el mismo carácter que el de las gráficas de la figura 5.5,
1. Para el Primer modo de excitación todas las seriales están prácticamente en fase (esta característica se presenta para frecuencias menores a la resonancia de la armadura del excitador electromagnético LDS V400 que es de 35 H ~ ) ,
2. Para el segundo modo de vibración, se observa desfasamiento de la señal de fuerza de excitación con respecto de la señal de alimentación de voltaje; encontrándose que alcanza primero su máximo valor la serial de voltaje y poster¡omente la señal de fuerza (señales grabadas en dominio del tiempo). Esta diferencia de fase se incrementa en función de la frecuencia, hasta llegar al punto en que son opuestas estas dos señales (180O de desfasamiento). Condición que se presenta. para el tercer modo y se mantiene esa característica de desfasamiento para frecuencias superiores a ésta (268 Hz).
3. AI incrementar el valor de fuerza no se presenta ningún cambio en el desfasamiento de las diferentes señales que se muestran (aceleración de acel. 1, voltaje de la fuente y fuerza de excitación).
4. La señal del acelerómetro 1 y la señal de la fuerza de excitación siempre están en fase.
De lo expuesto previamente se puede concluir que el desfasamiento entre las señales obedece a condiciones eléctricas.
Ya que al ser la fuerza de excitación función de la corriente que llega al excitador electromagnético, y queeste opera mediante bobinas, al aumentar la frecuencia de sus ciclos el comportamiento de la bobina tiene gran influencia desfasando la señal de corriente 180° de la señal de voltaje.
No existe desfasamiento mecánico a causa de las uniones o cualquier otro elemento usado para llevar a cabo la excitación forzada en la viga.
-La forma de las señales que se obtuvieron de los acelerómetros y el desfasamiento que se presenta entre estas.
La figura 5.6 muestra la forma y la fase de las señales obtenidas de los cuatro acelerómetros usados para la prueba de vibración forzada (ver capitulo 4 sección 4.4 para puntos de medición) del primer modo de vibración de la viga 1x900 (los datos numéricos de estas y todas señales obtenidas del experimento se presentan en [I]). Los valores con que se llevó a cabo esta prueba son: 0.047N de fuerza de excitación y 8 Hz de frecuencia de excitación.
La curva correspondiente al acelerómetro 1, es la misma que se muestra en la figura 5.3 para la comparación de fase con la señal de fuerza de excitación y voltaje de la fuente.
5-7
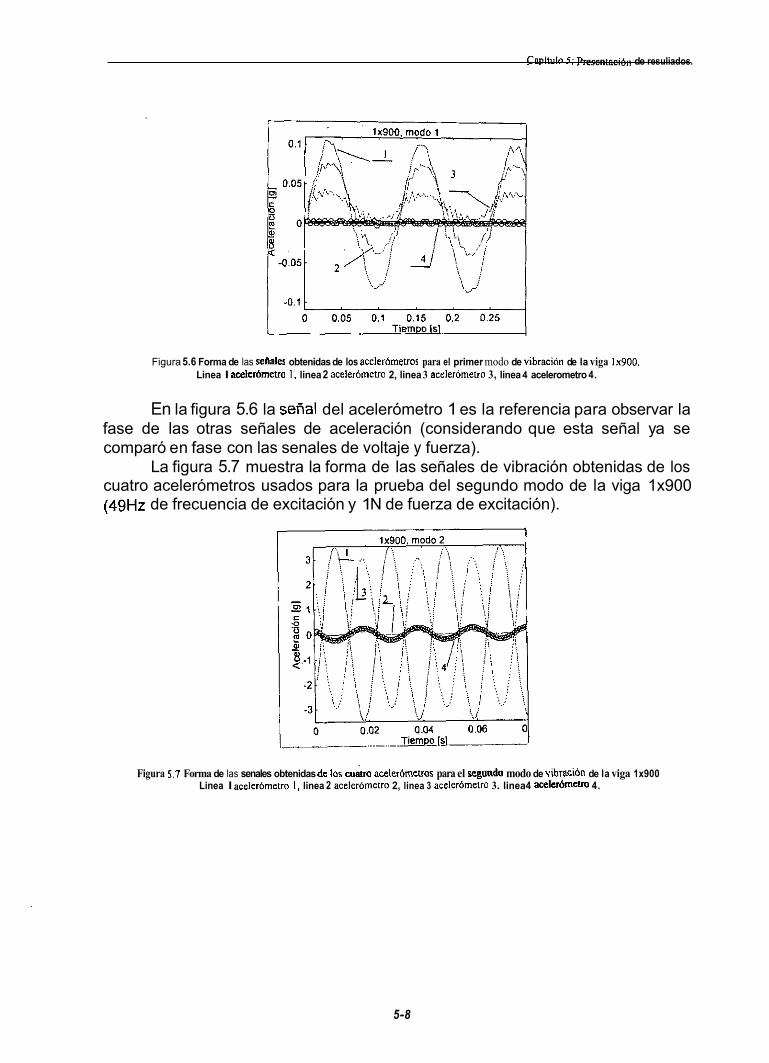
CaDltulo 5 : Presenlacióil de resuliados.
Figura 5.6 Forma de las Sellales obtenidas de los acclerdmetros para el primer modo de vibracidn de la viga 1x900. Linea I acelerhmetro I, linea 2 aceler6metra 2, linea 3 acelerometro 3, linea 4 acelerometro 4.
En la figura 5.6 la setial del acelerómetro 1 es la referencia para observar la fase de las otras señales de aceleración (considerando que esta señal ya se comparó en fase con las senales de voltaje y fuerza).
La figura 5.7 muestra la forma de las señales de vibración obtenidas de los cuatro acelerómetros usados para la prueba del segundo modo de la viga 1x900 (49Hz de frecuencia de excitación y 1 N de fuerza de excitación).
Figura 5.7 Forma de las senales obtenidas de los cu&a aceler6melros para el %%undo modo de vibration de la viga 1x900 Linea I aceler6metro 1, linea 2 aceler6melra 2, linea 3 acelerbmelro 3. linea4 acelcrdmevo 4.
5-8
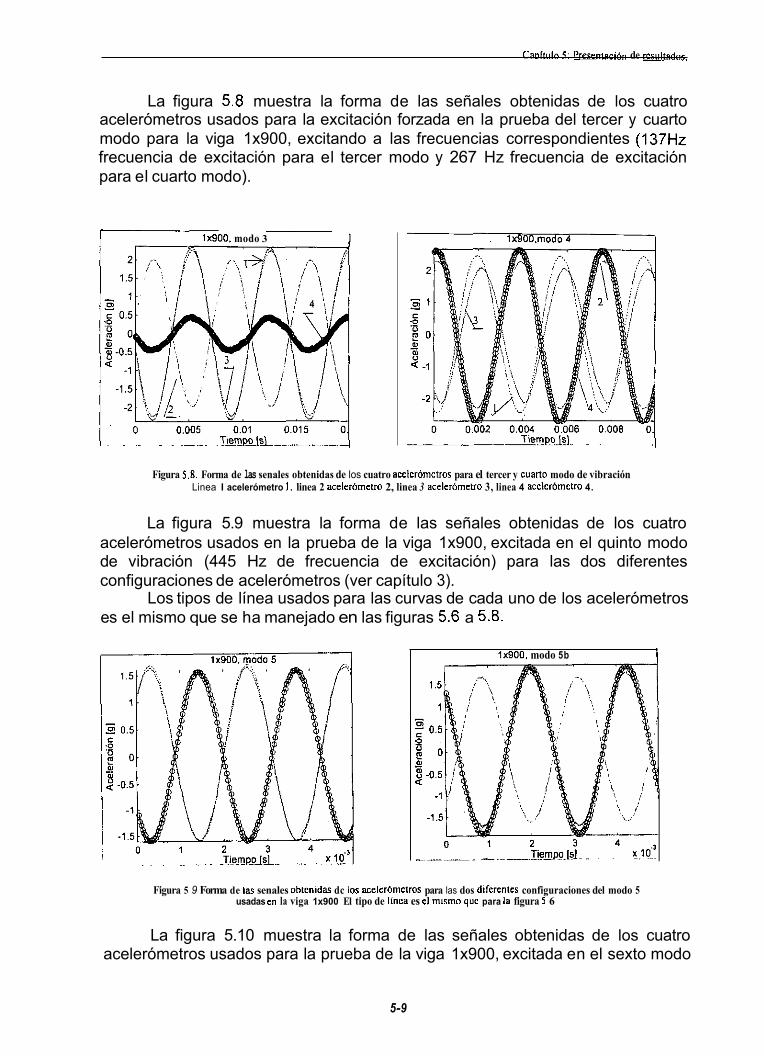
Caoitillo 5 : Presentacióii de rcsultedos.
La figura 5.8 muestra la forma de las señales obtenidas de los cuatro acelerómetros usados para la excitación forzada en la prueba del tercer y cuarto modo para la viga 1x900, excitando a las frecuencias correspondientes (137Hz frecuencia de excitación para el tercer modo y 267 Hz frecuencia de excitación para el cuarto modo).
1x900. modo 3 I
Figura 5.8. Forma de las senales obtenidas de los cuatro acelerbmetror para el tercer y cuan0 modo de vibración Linea I acelerómetro I , linea 2 acelerórnctro 2, linea 3 acelcrbmetro 3, linea 4 acelcrómetro 4.
La figura 5.9 muestra la forma de las señales obtenidas de los cuatro acelerómetros usados en la prueba de la viga 1x900, excitada en el quinto modo de vibración (445 Hz de frecuencia de excitación) para las dos diferentes configuraciones de acelerómetros (ver capítulo 3).
Los tipos de línea usados para las curvas de cada uno de los acelerómetros es el mismo que se ha manejado en las figuras 5.6 a 5.8.
1x900. modo 5b I
Figura 5 9 Forma de las senales obienidas dc los acelerórnetros para las dos dtferentcs configuraciones del modo 5 usadas en la viga 1x900 El tipo de linea es el miSrno quc para 18 figura 5 6
La figura 5.10 muestra la forma de las señales obtenidas de los cuatro acelerómetros usados para la prueba de la viga 1x900, excitada en el sexto modo
5-9
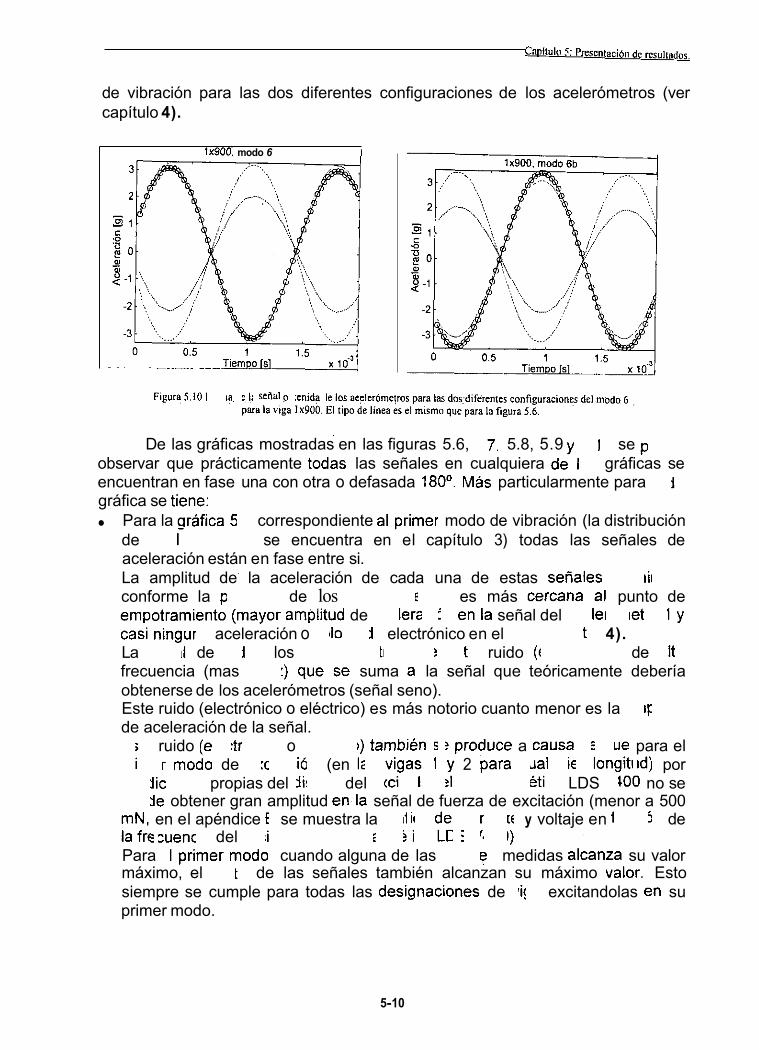
de vibración para las dos diferentes configuraciones de los acelerómetros (ver capítulo 4).
1x900. modo 6 I
F i w a 5 10 Forma de $3 señ4 ohicnioa de los aeclrromeiros pars la< dos difrrcnics configuracionrr del modo o para la \ iga Ix9UL El tipo o? l m a cs rl mismo que para la figura 5 6
De las gráficas mostradas en las figuras 5.6, 5.7, 5.8, 5.9 y 5.10 se puede observar que prácticamente todas las señales en cualquiera de las gráficas se encuentran en fase una con otra o defasada 180'. Mas particularmente para cada gráfica se tiene:
Para la gráfica 5.6 correspondiente al primer modo de vibración (la distribución de acelerómetros se encuentra en el capítulo 3) todas las señales de aceleración están en fase entre si. La amplitud de la aceleración de cada una de estas señales disminuye conforme la posición de los acelerómetros es más cercana al punto de empotramiento (mayor amplitud de aceleración en la señal del acelerómetro 1 y casi ninguna aceleración o solo ruido electrónico en el acelerómetro 4). La señal de todos los acelerómetros presenta ruido (electrónico) de alta frecuencia (mas 1kHz) que se suma a la señal que teóricamente debería obtenerse de los acelerómetros (señal seno). Este ruido (electrónico o eléctrico) es más notorio cuanto menor es la amplitud de aceleración de la señal. Este ruido (electrónico o eléctrico) también se produce a causa de que para el primer modo de excitacion (en las vigas 1 y 2 para cualquier longitud) por condiciones propias del diseño del excitador electromagnetico LDS V400 no se puede obtener gran amplitud en la señal de fuerza de excitación (menor a 500 mN, en el apéndice B se muestra la gráfica de corriente y voltaje en función de la frecuencia del excitador electromagnético LDS V400). Para el primer modo, cuando alguna de las señales medidas alcanza su valor máximo, el resto de las señales también alcanzan su máximo valor. Esto siempre se cumple para todas las designaciones de viga excitandolas en su primer modo.
5-10

Canllulo 5 : I'rcmenlaci0n de rcsuliados.
Para la figura 5.7 donde se presenta el segundo modo de vibración se observa que la señal obtenida del acelerómetro 2 es prácticamente cero (milésimas de [gl). Este acelerómetro proporciona esta señal a causa de que se colocó elemento de verificación en un punto donde teóricamente no habia desplazamiento. Las señales de 10s acelerómetros 1 y 2 son de amplitud muy Similar (los valores numéricos Para cada una de estas amplitudes se presenta en [I]) y desfasados I 80'. El acelerómetro 4 se localiza a 50 mm del empotramiento (para este modo) por lo que la amplitud de aceleración es casi cero en comparación con las señales de los acelerómetros 1 y 3. El acelerómetro 4 y el 3 se encuentran en fase (el desplazamiento de ambos es en el mismo sentido en un instante determinado). Para la figura 5.8, en la gráfica correspondiente al tercer modo de vibración se observa una clara diferencia entre la amplitud del acelerómetro 4 y los otros acelerómetros. Esta diferencia es a causa de que el acelerómetro 4 se encuentra ubicado a 50mm del empotramiento (para este modo), y los otros se ubican en los puntos donde se espera obtener despla amiento máximos, por lo que se observa este cambio de amplitud en las señales. Para este modo de vibración, se tienen tres acelerómetros en fase que son el
Esto representa que cuando los acelerómetros 1 y 3 alcanzan su desplazamiento máximo positivo, el acelerómetro 2 alcanza su desplazamiento máximo negativo. Para la figura 5.8, en la gráfica correspondiente al cuarto modo de Vibración todos los acelerómetros se colocaron donde se suponía que habia un desplazamiento máximo. Las amplitudes de aceleración para todos los acelerómetros es muy similar y se encuentran en fase las señales de los acelerómetros 1 y 3 y desfasadas 180' de las señales de los acelerómetros 4 y 2. Para la figura 5.9 se presentan dos diferentes gráficas del quinto modo de vibración (correspondiente al modo de vibración 5 y 5b, ver capítulo 4). Esto obedece a que para este modo se tienen 5 puntos de interés, y con el equipo disponible para el experimento solamente se pueden medir en el mismo instante 4 de estos 5 puntos. Por lo que para registrar la aceleración del punto numero 5, acelerómetro 4 se cambia de posición y se toman las lecturas de nuevo. Entonces en este modo para la primera configuración de acelerómetros se tienen en fase a 1 y 3. Mientras que 2 y 4 también están en fase entre si y defasado 180' de la señal del acelerómetro 1. Para la configuración (b) del modo 5 se tiene la señal de los acelerómetros 1, 3 y 4 en fase y la señal del acelerómetro 2 defasada 180'. Para la figura 5.10 se presentan las señales de las dos configuraciones correspondientes al modo 6 de vibración.
f
1, 3 y 4; mientras que el aceleró A ,etro 2 se encuentra defasado 180'.
5-1 I
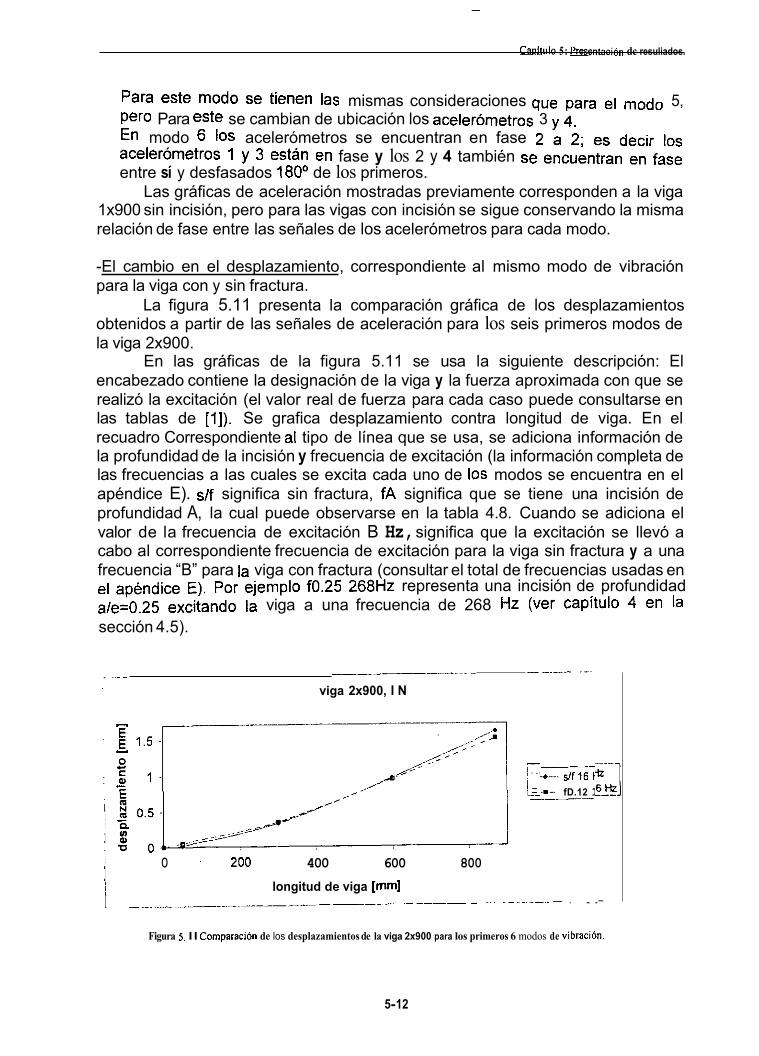
Cauliiilo 5: PresentaciOn dc resuliados.
Para este modo se tienen las mismas consideraciones que para el modo 5, Pero Para este se cambian de ubicación los acelerómetros 3 y 4. En modo 6 10s acelerómetros se encuentran en fase 2 a 2; es decir los acelerómetros 1 y 3 están en fase y los 2 y 4 también se encuentran en fase entre sí y desfasados 180° de los primeros.
Las gráficas de aceleración mostradas previamente corresponden a la viga 1x900 sin incisión, pero para las vigas con incisión se sigue conservando la misma relación de fase entre las señales de los acelerómetros para cada modo.
-El cambio en el desplazamiento, correspondiente al mismo modo de vibración para la viga con y sin fractura.
La figura 5.11 presenta la comparación gráfica de los desplazamientos obtenidos a partir de las señales de aceleración para los seis primeros modos de la viga 2x900.
En las gráficas de la figura 5.11 se usa la siguiente descripción: El encabezado contiene la designación de la viga y la fuerza aproximada con que se realizó la excitación (el valor real de fuerza para cada caso puede consultarse en las tablas de [I]). Se grafica desplazamiento contra longitud de viga. En el recuadro Correspondiente al tipo de línea que se usa, se adiciona información de la profundidad de la incisión y frecuencia de excitación (la información completa de las frecuencias a las cuales se excita cada uno de los modos se encuentra en el apéndice E). s/f significa sin fractura, fA significa que se tiene una incisión de profundidad A, la cual puede observarse en la tabla 4.8. Cuando se adiciona el valor de la frecuencia de excitación B Hz, significa que la excitación se llevó a cabo al correspondiente frecuencia de excitación para la viga sin fractura y a una frecuencia “B” para la viga con fractura (consultar el total de frecuencias usadas en el apéndice E). Por ejemplo f0.25 268Hz representa una incisión de profundidad a/e=0.25 excitando la viga a una frecuencia de 268 Hz (Ver Capítulo 4 en la sección 4.5).
~ ~. - . _._
viga 2x900, I N I
~-+..-- s/f 16 & r - ---. fD.12 16M -7 o ~ 200 400 600 800 I longitud de viga [mm]
I - . . .-
Figura 5 . I I ComparaciOn de los desplazamientos de la viga 2x900 para los primeros 6 modos de vibraci6n.
5-12
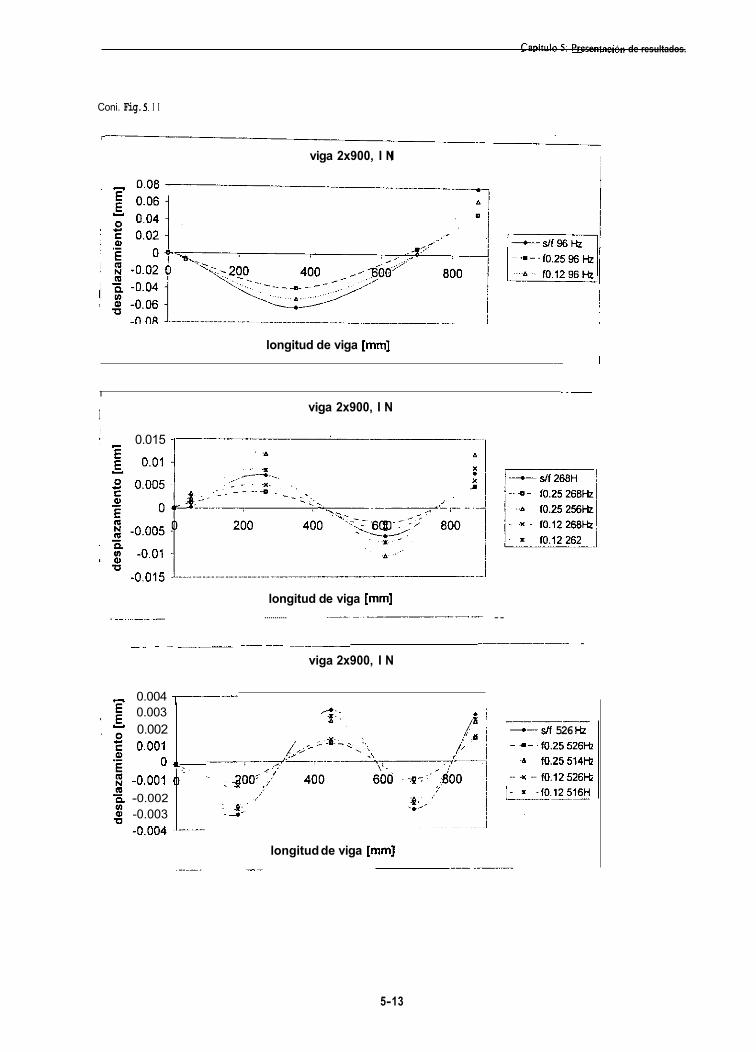
Caoitulo 5. Prcsentacion de resultados.
0.003 0.002 0.001
o -0.001 -0.002 -0.003 -0,004
Coni. Fig. 5. I I
1.-
(1
r
viga 2x900, I N
longitud de viga [mm] ~
1
I __ viga 2x900, I N 1
0.015 1
longitud de viga [mm] ........... .. .--- . .......
. -. ___ _ ~ _ _ _ viga 2x900, I N
0.004 I------ i
4- sll 526 M - a- -fO.25 526M
~A ' f0.25 514W - * - 10.12 526W
longitud de viga [mm] _ _
5-13

Conl. Fig. 5 .1 I
-~ ~
1 I viga 2x900, 1N i
~ , E 0.0003 ' - 0.0002 z 0.0001 O
al .-
- ' E
E I
! _+_ df 1320M ' - -- f0.25 1320M ! A f0.251300M
0,0015 ................. - .. __ ~ 1'''"
a.
I ' ' I
longitud de viga [mm] - .. ~
. . . . . . . . . . . . . . . . . . . . . . . -. - - ..... . .
viga 2x900, I N i 0,0004 . . ! - I"' .. .. *
-x ) A. :. a '..
i . . . . . . . . . . . . . . . 1. i ! i
\.
. l o o \PO$. 600 "., ..BOO
d . . I Y
i -0.0004 '-- I longitud de viga [mm]
La serie de gráficas mostradas en la figura 5.11 corresponden a los seis primeros modos de vibración de la viga 2x900 excitados con 1 N de fuerza.
Estas gráficas de desplazamiento fueron obtenidas a partir de la media de los valores obtenidos de las señales de aceleración para cada modo.
Para la obtención del valor medio se promediaron 21 señales en el analizador de espectros HP 3566A4, y posteriormente al archivo de datos resultante de este promedio, mediante un programa creado en matlab (el digrama de flujo se encuentra en el apéndice D), se hizo el promedio de 21 valles (valores máximos negativos de la señal seno), y 21 crestas (valores ,máximos positivos de la señal seno)de la señal de aceleración resultante con lo que se obtuvo el valor medio.
Para las gráficas mostradas en la figura 5.1 1 se puede observar que: En la construcción de las gráficas se tomaron en cuenta, tanto profundidad de la incisión como las frecuencias obtenidas experimentalmente para la excitación. Para la determinación de si el valor del punto de medición correspondía a un valor positivo o negativo, siempre el valor del acelerómetro 1 se tomó positivo y
5-14

~ ~~
Canlrulo 5 : Presentacibn de resuliados
de m ~ e r d o a la fase que se tienen en las señales de aceleración se determinó el signo del rest0 de los puntos de medición. En todos los casos, la curva que se forma con los valores de 10s desplazamientos de cada uno de los modos para la viga sin incisión es la que se toma como referencia (curva trazada con línea continua) para hacer la comparación de los desplazamientos de la viga cuando tiene alguna incisión. Las curvas trazadas para los desplazamientos de la viga cuando contiene alguna incisión se traza con tipos de linea que no son continuos. En el cuadro del lado derecho de cada gráfica se muestran los tipos de línea utilizados, la marca que se coloca en el punto donde se encontraba el acelerómetro sobre la viga y la profundidad de la incisión (por ejemplo f0.12 quiere decir que la profundidad de la incisión es a/e=0.12 y la frecuencia de excitación es la misma que para la viga sin fractura). Además en algunos casos se aumenta a esta información el valor de la frecuencia de excitación. Cuando esto ocurre, representa que la misma viga se excitó a dos diferentes frecuencias (una correspondiente a la frecuencia encontrada para la viga sin fractura y la otra correspondiente a la frecuencia encontrada para la viga con incisión). Como puede verse en las gráficas de la figura 5.11, si la frecuencia de excitación corresponde a la de la viga sin incisión, los desplazamientos para la viga con incisión decrecen en comparación con los desplazamientos obtenidos de la primera. Si la viga con incisión se excita a su frecuencia natural, los desplazamientos de esta viga comparados con los obtenidos de la viga sin fractura prácticamente se igualan o en algunos casos llegan a ser mayores. Las mediciones realizadas para el primer modo no resultan tan confiables a causa del ruido presente en las señales de aceleración; Y a que no siempre fue posible obtener la misma fuerza en pruebas de vigas correspondientes.
Se puede concluir que para la viga con incisión excitada a la frecuencia de la viga sin incisión (realmente no corresponde a su frecuencia natural) los desplazamientos disminuyen. Mientras que al excitarla a su correspondiente frecuencia natural los desplazamientos se incrementan, esta comparación se hace tomando como base los desplazamientos de la viga sin incisión.
Las gráficas presentadas en la figura 5.11 se excitaron con de 1 N de fuerza; las gráficas correspondientes a éstas, pero para 5 N de excitación presentan caracteristicas similares (todas estas gráficas se muestran en [I]).
Los valores numéricos de estos incrementos y decrementos de desplazamiento con referencia a los desplazamientos de la viga sin incisión se presentan en [I]. y a manera de ejemplificar estos resultados se presentan algunas tablas en la sección correspondiente al análisis cuantitativo.
5-15
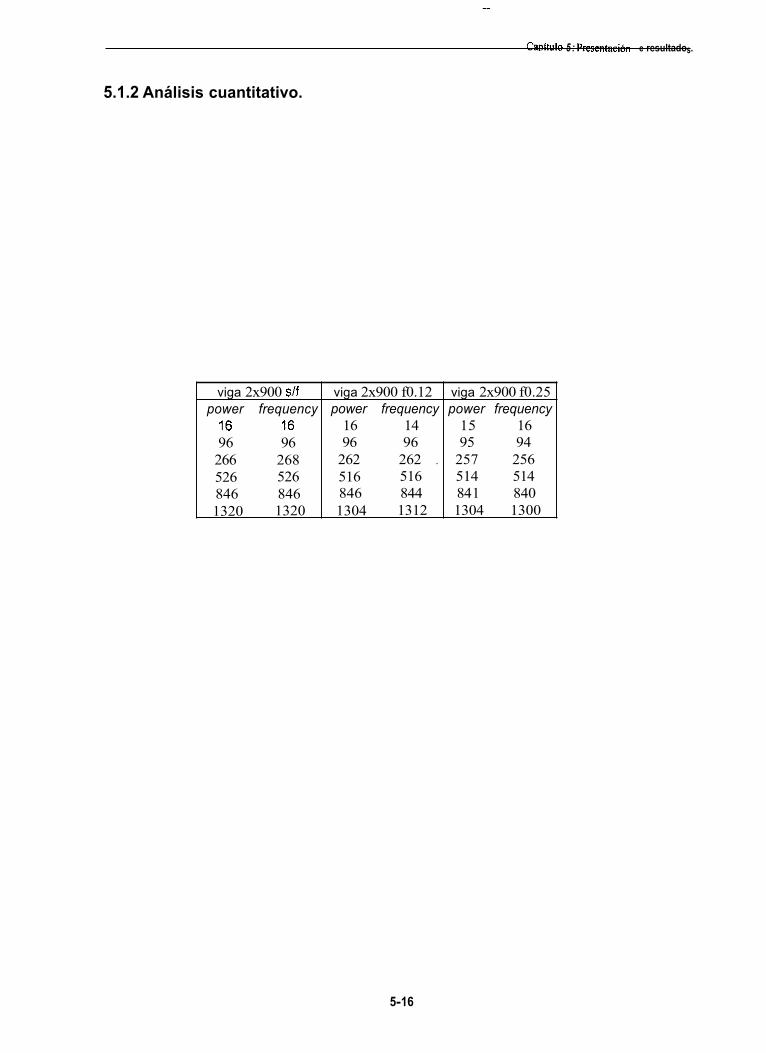
CaDltuln 5 : Prerentacidn e resultados.
viga 2x900 s/f viga 2x900 f0.12 viga 2x900 f0.25 power frequency power frequency power frequency
16 16 16 14 15 16 96 96 96 96 95 94 266 268 262 262 . 257 256 526 526 516 516 514 514 846 846 846 844 84 1 840 1320 1320 1304 1312 1304 1300
5.1.2 Análisis cuantitativo.
5-16
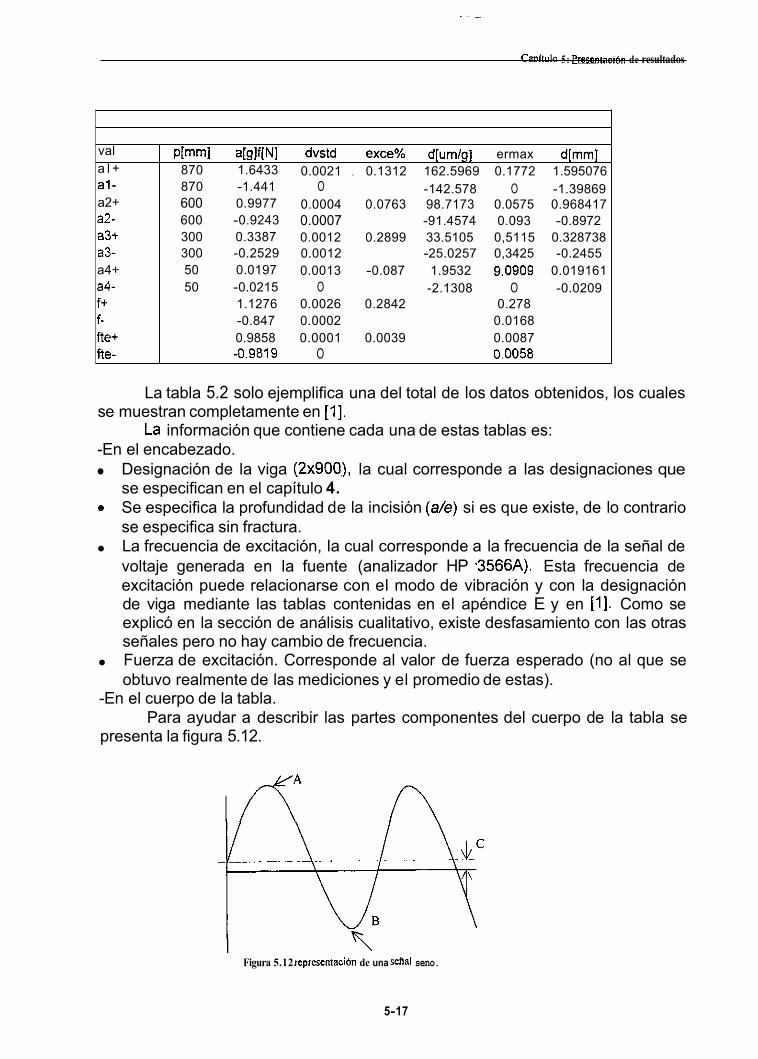
- .~
Caoltulo 5: Presenlaci6n de resultados
val a l +
a2+
a3+
a4+
f+ f- fie+ fie-
a l -
a2-
a3-
a4-
~ [ m m ] a[gIqNl dvstd exce% d[urn/g] ermax d[mm] 870 1.6433 0.0021 . 0.1312 162.5969 0.1772 1.595076
600 0.9977 0.0004 0.0763 98.7173 0.0575 0.968417
300 0.3387 0.0012 0.2899 33.5105 0,5115 0.328738
50 0.0197 0.0013 -0.087 1.9532 9,0909 0.019161
870 -1.441 O -142.578 O -1.39869
600 -0.9243 0.0007 -91.4574 0.093 -0.8972
300 -0.2529 0.0012 -25.0257 0,3425 -0.2455
50 -0.0215 O -2.1308 O -0.0209 1.1276 0.0026 0.2842 0.278 -0.847 0.0002 0.0168 0.9858 0.0001 0.0039 0.0087 -0.9819 O 0.0058
La tabla 5.2 solo ejemplifica una del total de los datos obtenidos, los cuales
La información que contiene cada una de estas tablas es: se muestran completamente en [I].
-En el encabezado. Designación de la viga (2x900), la cual corresponde a las designaciones que se especifican en el capítulo 4.
0 Se especifica la profundidad de la incisión ( d e ) si es que existe, de lo contrario se especifica sin fractura. La frecuencia de excitación, la cual corresponde a la frecuencia de la señal de voltaje generada en la fuente (analizador HP ,3566A). Esta frecuencia de excitación puede relacionarse con el modo de vibración y con la designación de viga mediante las tablas contenidas en el apéndice E y en [I]. Como se explicó en la sección de análisis cualitativo, existe desfasamiento con las otras señales pero no hay cambio de frecuencia. Fuerza de excitación. Corresponde al valor de fuerza esperado (no al que se obtuvo realmente de las mediciones y el promedio de estas).
-En el cuerpo de la tabla. Para ayudar a describir las partes componentes del cuerpo de la tabla se
presenta la figura 5.12.
Figura 5.12 rcpresentacidn de una sena1 seno.
5-17
Caol d o 5: Presenlacidn de resultados.
En la que tiene el encabezado val, se designan a las variables que
a l + 10s valores Positivos de la señal seno del acelerómetro 1 (ver capítulo 4 para la posición y Características de los acelerómetros, además ver parte A de la fig. 5.12).
a l - 10s valores negativos de la Señal seno del acelerómetro 1 (parte B de la figura 5.12).
a2+ análogo a a l+ . a2- análogo a al- . a3+ análogo a al+. a3- análogo a al-. a4+ análogo a al+. a4- análogo a al- . f+ valores positivos de la señal de fuerza (ver capítulo 3 y parte A de la
f- valores negativos de la señal de fuerza (parte B de la fig. 5.12). fte+ valores positivos de la señal de voltaje proveniente de la fuente (parte
fte- valores negativos de la señal de voltaje proveniente de la fuente (parte
O En la columna encabezada como p[mm], se anota la posición de los acelerómetros sobre la viga, medida a partir del empotramiento (ver tabla 4.7).
O Columna a[g]r[N]. Corresponde a los valores promedio de aceleración [g] para todas las filas de los acelerómetros, fuerza de excitación [NI para las filas representadas por “f+” y “f-”i voltaje de la fuente [VI para las filas representadas por “fie+” y “fte-; de las señales digitalizadas en el analizador de señales HP 3566A. Como se explicó en la sección de análisis cualitativo (sección 5.1.1), los valores promedio que se muestran en estas tablas se obtuvieron de promediar 21 seriales en el analizador. Posteriormente, mediante un programa creado en ambiente matlab se promediaron 21* valores de valles (o crestas si se considera el valor positivo de las partes A o B de la figura 5.12 según sea el caso) de cada una de las señales resultantes, y el valor que proporcionó este programa es el que se encuentra contenido en la tabla. Columna dvsts. Corresponde a la desviación estándar que se tiene al realizar el promedio de los 21 valores en el programa hecho en matlab. . Columna exce[%]. Corresponde al valor porcentual de la diferencia entre el eje de simetría de la señal senoidal y el valor cero del eje de las ordenadas que proporciona el analizador (diferencia representada por C en la fig. 5.12). El signo que contiene este valor esta relacionado con el sentido del desplazamiento del eje de simetría respecto del eje de las ordenadas. Columna d[um/g]. Valores auxiliares que se utilizaron para obtener el desplazamiento.
son de interés para las mediciones, las cuales representan:
figura 5.12).
A de la fig. 5.12).
B de la fig. 5.12).
*Para la frecuencias correspondientes al primer moda de vibracidn no siempre fue posible promediar 21 cicios, par lo que cuando 18
imrecuencia es menor de 22 Hz, el número de datas promediados conesponde a la frecuencia de excitaci6n.
5-18

CaDllUlO 5: Presentación de resultados.
s/flmm] f0.25[%] 526Hz 514Hz
0,00270167 -51.37981 12 -15.8678286 -0.0028243 -62.8690518 -20.8753039 0.00298028 -63.9565504 -20.1777485 -0.00314116 -62.3985009 -17.6452217
Columna ermax. Corresponde a la diferencia porcentual entre el valor de la media de las señales, y la dispersión máxima de este grupo de puntos promediados. Columna d[mm]. Es el valor de desplazamiento en mm (a no ser que se indique lo contrario d[umm]) obtenido a partir de los valores promedios de aceleración. Como es sabido, el desplazamiento y la aceleración tienen un desfasamiento de 180°, es decir en el mismo instante tiene signos contrarios. Sin embargo por simplificación del programa y del uso de estos datos, se considera el mismo signo para el desplazamiento y la aceleración; pero debe tenerse presente el arreglo hecho para este caso.
fO.12[%] 526Hz 516Hz
-46.9862019 -10.6390704 -56.5474123 -12.6432789 -57.3403555 -12.5411455 -56.0274828 -10.6808245
Para esta sección también se incluyen algunos ejemplos de los valores numéricos de la diferencia obtenida en los desplazamientos para la viga sin fractura y los desplazamientos que presenta esta misma viga cuando contiene una incisión.
Tomando como base las gráficas del cuarto modo de vibración mostradas en la figura 5.11, la tabla 5.3 presenta las diferencias porcentuales de los desplazamientos con incisión en función de los valores de desplazamiento obtenidos para la viga sin incisión.
AI igual que para las tablas 5.1 y 5.2, la tabla 5.3 se usa para ejemplificar el total de los datos obtenidos, los cuales se muestran en [I].
0.01029854 -0.01007193 0.01037996 -0.01124913
._ -33.1491713 4.00076205 -33.0920175 4.50562012 -42.0960358 3.6037791 -41.7064381 7.92831402 -42.3211417 5.9068141 -42.3211417 9.9518004 -40.7255603 6.56666957 -41.2749629 10.2816779
5-19
Canltulo 5 : Prrscntacidn dc reslitlador.
El modo de vibración (el Cual se relaciona con los valores de frecuencia de las tablas semejantes a la 5.1 que se presenta en 111 y en el apéndice E). La fuerza de excitación esperada (este valor corresponde al que se presenta en el encabezado de las tablas análogas a la 5.2 y no al obtenido del promedio de las señales). La primera columna (izquierda) representa el desplazamiento en mm para la Viga sin fractura excitada a su frecuencia natural (para el modo de vibración correspondiente, ver apendice E). La segunda columna (fO.25[%]) en su encabezado presenta la profundidad de la fractura ( d e ver capítulo 4) y puede contener una o dos columnas dependiendo de la profundidad de las incisiones que se tengan. En el caso de que ésta contenga solamente una columna, los valores ahí presentados corresponden a la diferencia porcentual de desplazamiento obtenido de la viga con incisión con relación a la viga sin incisión. La frecuencia y fuerza de excitación corresponderán a los valores de la viga sin fractura (ver apéndice E). En el caso de contener dos columnas, quiere decir que la viga fue excitada a dos frecuencias diferentes. Estas frecuencias serán: 1 )la frecuencia natural de la viga sin fractura y 2) la obtenida posteriormente de la viga con incisión. Los valores de las frecuencias se anotarán en la primera fila antes de los valores porcentuales de desplazamiento. Para la tercera columna (fO.12[%]) se tienen datos análogos a la columna número 2. Para todos los valores porcentuales de este tipo de tablas se considera el signo que las antecede. De esta forma si el signo que antecede al valor porcentual es negativo, representará que el desplazamiento es menor que el obtenido para la viga sin fractura. Si el valor porcentual tiene signo positivo (ningún signo anotado), representa que el desplazamiento medido es mayor que el obtenido para la viga sin incisión.
En la siauiente sección de este capítulo se describen brevemente los - resultados obtenidos para las diferentes conf/guraciones de viga.
Como se ha mencionado a lo largo de este capítulo, los datos y gráficas mostradas sirven solamente para ejemplificar el total de los datos obtenidos de la experimentación, y reflejan sólo una parte de las observaciones que se hicieron.
Pero como también ya se dijo, el total de los resultados se presenta en [ I ] para cualquier revisión posterior.
5-20

5.2 Compendio de resultados.
A continuación se presenta una breve explicación de los resultados obtenidos.
En [ I ] se presentan tanto las gráficas como tablas numéricas obtenidas a partir de la señal digitalizada en el analizador de señales HP 3566A para este trabajo.
Todas estas gráficas y valores numéricos fueron obtenidos de acuerdo a las consideraciones hechas en la sección 5.1.2.
Debe tenerse presente que los valores medidos corresponden a los puntos donde se ubican las marcas en la gráfica, y que la línea que une estos puntos es una curva ajustada la cual puede no corresponder en su totalidad al comportamiento de la viga.
La descripción que se hace en esta sección corresponde a cada una de las designaciones de viga en particular.
Las comparaciones porcentuales se hacen tomando como referencia los desplazamientos de la viga sin incisión para el correspondiente modo y fuerza de excitación. De esta manera cada vez que se diga que el desplazamiento aumenta o disminuye será en relación con los desplazamientos de la viga sin incisión; a no ser que se especifique lo contrario.
5.2.1 Viga 1x1000
Para esta designación de viga la fuerza con que se llevó a cabo la excitación de su segundo modo de vibración (40Hz) fue Únicamente de 1 N (para la vi& con incisión y sin incisión), a causa de que al incrementar la magnitud de la fuerza se presentaban cambios de forma en las señales tanto de aceleración como de fuerza.
El cambio en la forma de las señales se le atribuye a que el valor de la frecuencia del segundo modo de vibración se encuentra cercano al valor de frecuencia de resonancia de la armadura (35Hz).
Para la incisión de a/e=0.25 ubicada a xfA=0.95 se observa que: Para el lo, 2 O , 3O,4O y 5 O modo, los desplazamientos obtenidos a partir de la misma frecuencia de excitación de la viga sin incisión son visualmente muy similares (variando de 0.24% a un máximo de 8.56%). Para el lo, 2 O , 3O y 4' modo los desplazamientos de la viga sin fractura siempre son mayores que los desplazamientos de la viga con fractura (variando la diferencia de 0.24% hasta 8.56%).
Para todos los modos excepto el sexto los desplazamientos son siempre menores que los de la viga sin incisión. La diferencia entre los desplazamientos de la viga sin incisión se reduce si la frecuencia de excitación correspondiente a ese modo es la de menor valor (se
Para la incisión de a/e=0.51 ubicada a xf/l=0.73 se observa que:
5-2 I
tiene una frecuencia para la viga sin incisión y otra para viga con incisión en el mismo modo de vibración). La diferencia de desplazamientos para la frecuencia de excitación de mayor valor correspondiente al mismo modo varía entre 20.41% y 48.8%. La diferencia de desplazamientos para la frecuencia de menor valor correspondiente al mismo modo varia entre 0.019% y 34.8%.
Para los dos tipos de incisiones en el sexto modo se tiene que si la viga es excitada a la frecuencia natural de la viga sin incisión, los desplazamientos siempre son menores.
5.2.2 Viga 1x700
.Para esta designación no se presenta comparación del primer modo, a causa de que, como ocurre en muchos otros casos no se pudo tener la “misma” fuerza de excitación para la frecuencia correspondiente al primer modo. . .
Para la.incisión.de a/e=0.25 ubicada a xfn=O.92 se observa que: Los desplazamientos para el modo de vibración 2 y 3 siempre son menores (la frecuencia de excitación corresponde a la de la viga sin incisión), variando porcentualmente entre 4.32% y 17.29%. Para el cuarto y quinto modo los desplazamientos se presentan en un intervalo de 0.83% a 22.85%.
Los desplazamientos siempre son menores en un intervalo de 0.037% a 31.63%, cuando se excita a la frecuencia de la viga sin incisión. Los desplazamientos siempre son mayores en un intervalo de 0.2% a 36.02%.
Para la incisión de a/e=0.51 ubicada a xfn=0.61 se observa que:
De lo expuesto aqui, se puede observar que cuando la incisión se encuentra cercana al extremo libre no existe un indicativo específico de la presencia de esta incisión.
Los datos obtenidos de los desplazamientos de la incisión ubicada a xf/l=0.61 establecen que:
AI excitar la viga, con incisión a la frecuencia natural de la viga sin incisión, los desplazamientos disminuyen; mientras que al excitarla a su frecuencia natural encontrada para la viga con incisión los desplazamientos aumentan.
5.2.3 Viga 1x800
Para la incisión de a/e=0.25 ubicada a xfA=0.93 se observa que: Los desplazamientos para todos los modos y las dos fuerzas de excitación son menores, cuando la frecuencia de excitación es la misma que para la viga sin incisión. La disminución de los desplazamientos varía entre 4.9% y 30.96%. Los desplazamientos del modo de vibración 5 y 6 aumentan si la frecuencia de excitación corresponde a la de la viga con incisión en un porcentaje de 0.19% a 30.2%.
Para la incisión de a/e=0.51 ubicada a xfA=0.66 se observa que:
5-22
Los desplazamientos para todos los modos y las dos fuerzas de excitación son menores, cuando la frecuencia de excitación es la misma que para la viga sin incisión. La disminución de los desplazamientos varía entre 2.79% y 61 3 % . Si la frecuencia de excitación es la que corresponde a la viga con incisión, los desplazamientos son mayores que los obtenidos al excitar la viga a la frecuencia de la viga sin incisión; pero no siempre llegan a ser mayores que los desplazamientos de la viga sin fractura. Cuando los desplazamientos son mayores que los de la viga sin incisiónm, el porcentaje de aumento oscila entre 4.86% y 32.32. Cuando los desplazamientos son ligeramente menores que los de la viga sin incisión, el porcentaje de reducción oscila entre 1.55% y 8.37%. Para los porcentajes de reducción antes mencionados no se consideran los valores del modo 4 de vibración, ya que los valores de este están entre 23% y 40% para I N de excitación, mientras que 14% y 28% es la reducción de desplazamiento para 5N de excitación. Este modo en particular requiere mayor atención para el diagnostico de falla.
CaDllUlO 5 : Prescntacián de rcsultndos.
5.2.4 Viga 1x900
Para la incisión de afe=0.25 ubicada a xfe0.94 se observa que: En los primeros 5 modos de vibración, el desplazamiento es menor en un porcentaje de 2.25% a 31.92% cuando la frecuencia de excitación es la misma que para la viga sin incisión. Excepto para el modo 4 con 5N de fuerza de excitación, donde los desplazamientos son un poco mayores (entre 3 y 5%). Para el quinto modo donde se tienen 2 frecuencias de excitación, el desplazamiento aumenta en un porcentaje de entre 3% y 7%.
En los primeros 4 modos los desplazamientos son menores que los obtenidos de la viga sin incisión; pero los desplazamientos para la frecuencia de excitación correspondiente a la viga sin incisión son menores (diferencia porcentual entre 15.68% y 46.77%) que al excitar la viga a su frecuencia natural con incisión (diferencia porcentual entre 0.16% y 16.51%). Para el modo 5, la disminución porcentual de desplazamiento al excitar la viga con incisión a la frecuencia de la viga sin incisión varía entre 6.82% y 15.03%, mientras que el aumento porcentual de desplazamiento al excitarla a la frecuencia de la viga con ranura varía entre 2.87% y 2.55%.
Para la incisión de a/e=0.51 ubicada a xffl=0.7 se observa que:
5.2.5 Viga 2x1 O00
Para la incisión de a/e=O.12 ubicada a xfn=0.73 se observa que: Cuando la excitación de la viga con incisión es igual que la frecuencia obtenida para la viga sin incisión, los desplazamientos que se obtienen son menores en un porcentaje que varía de 0.2% a 20.81%, encontrandose que para el modo 4 con I N de excitación el desplazamiento es ligeramente mayor en un máximo de 2.75%.
5-23
Caollulo 5 : Prcsenlacidn dc resulisdos.
En el modo 4, 5 y 6 de vibración se obtuvo otra frecuencia para la viga con la ranura; y excitando la viga a esta otra frecuencia se observa que los desplazamientos son mayores en un porcentaje que varía de 3.52% hasta 92.18%. Excepto en el modo 6 con 1 N de excitación donde se encuentra que el desplazamiento disminuye en un máximo del 10%.
Cuando la excitación de la viga con incisión es igual que la frecuencia obtenida para la viga sin incisión los desplazamientos que se obtienen son menores en un porcentaje que varía de 7.37% a 68.23%; se encontró que para el modo 5 con 5N de excitación el desplazamiento es ligeramente mayor en un porcentaje de entre 2.8% y 3.6%. En el modo 3, 4 y 5 de vibración, donde se tiene una segunda frecuencia para excitar la viga con la incisión, se tiene que los desplazamientos son mayores en un intervalo que varía de 044% y 103.75%. Este valor máximo se encuentra en el modo 4 de vibración.
Para la incisión de a/e=0.25 ubicada a xf/1=0.73 se observa que:
5.2.6 Viga 2x800
Para la incisión de de=0.25 ubicada a xfA=0.66 se observa que: Las observaciones realizadas son análogas a las de la viga 2x1000, encontrándose un porcentaje de disminución de desplazamiento entre el 5.64% y 34.05%; Pero para el modo 5 y el modo 3 con I N de excitación se tiene un incremento en el desplazamiento de entre 20% y 46%. Cuando la viga es excitada a la frecuencia encontrada para la viga con incisión, el aumento de desplazamiento oscila entre 2.39% y 143.72%
Las observaciones realizadas son análogas que para la viga 2x1000, donde la disminución del desplazamiento está entre 3.14% Pero al igual que para la otra profundidad de ranura, el modo 5 y 3 presentan un incremento de desplazamiento de alrededor de 3.26% y 60.16%. El desplazamiento de la viga cuando se excita a la frecuencia correspondiente a la viga con ranura no es mayor que el correspondiente a los desplazamientos de la viga sin incisión; pero tiene una disminución máxima de 6.84% para el cuarto modo y de 34.74% para el tercer modo.
Para la incisión de a/e=0.12 ubicada a xfn=0.66 se observa que:
5.2.7 Viga 2x900
Para la incisión de de=0.25 ubicada a xf/1=0.7 se observa que: AI excitar la viga con incisión a la frecuencia de la viga sin incisión, los desplazamientos disminuyen en un intervalo de 2.56% hasta 63.95%; excepto para el modo 5 donde se observa un incremento de entre 5.52% hasta 18.34%. Si la excitación se realiza a la frecuencia correspondiente a la de la viga con incision, los desplazamientos aumentan porcentualmente entre 4% y 169%.
5-24
Caollulo 5 : Prcscntacidn de resuliados.
Excepto para el modo 6 donde se tiene un decremento en el desplazamiento de entre 7.04% y 14.8%. Y en el modo 4 con I N de excitación la disminución es de entre 15.86% y 20.87%.
AI excitar la viga con incisión a la frecuencia de la viga sin incisión, los desplazamientos disminuyen en un intervalo de 13.8% hasta 61.48%; excepto para el modo 5 donde se observa un incremento de entre 3% hasta 21.39%. Si la excitación se realiza a la frecuencia correspondiente a la de la viga con incisión, los desplazamientos aumentan porcentualmente entre 4.5% y 16.32%. Excepto para el modo 4 con I N de excitación donde se tiene un decremento en el desplazamiento de entre 10.63% y 12.64%.
Para la incisión de a/e=0.12 ubicada a xfA=0.7 se observa que:
5.2.8 Viga 3x1 O00
Para la viga 3 y la 4 solamente se tiene una profundidad y localización de viga.
La profundidad con que cuentan estas dos vigas corresponde a la profundidad maxima que se pudo obtener con el cortador de disco de (ver cap. 3).
La profundidad de incisión obedece a que para una profundidad menor en estas vigas, no se observaba cambio en las frecuencias de las vigas que se obtuvieron del analizador de setiales HP 3566A mediante las funciones frequency response y power spectrum (ver capítulo 4).
Como se puede observar en las tablas comparativas de frecuencias del apéndice E, aunque se tenía esta profundidad de fractura no siempre fue posible determinar una frecuencia diferente de la viga sin incisión para la viga con incision.
La incisión es a/e=0.15 ubicada a xfA=0.73; las observaciones son: Ai excitar la viga con incisión a la misma frecuencia que para la viga sin
incisión, los desplazamientos disminuyen porcentualmente entre 1.94% y 72.07%. Excepto para el modo 4 donde los desplazamientos aumentan alrededor de 43.5% y 172.44%.
En el modo 3 se tiene una frecuencia que corresponde a la de la viga con incisión y al excitar la viga a esta frecuencia (362Hz) los desplazamientos aumentan porcentualmente entre 50.99% y 85.16%.
5.2.9 Viga 3x800
Para la incisión de a/e=0.15 ubicada a xfA=0.66 se observa que: En los modos de vibración del 2 al 6, si la viga con incisión se excita a la
frecuencia correspondiente de la viga sin incisión, los desplazamientos disminuyen porcentualmente en un intervalo comprendido entre 20.21 '70 y 36.38%.
En los modos de vibración 2 y 4 en los cuales se obtuvo frecuencias para la viga con ranura, los desplazarnientos se incrementan en un valor porcentual entre 70.93% y 138% para el modo 2. Para el modo 3, los desplazamientos se incrementan entre 3.46% y 58.71%.
5-25
5.2.10 Viga 3x900
Para la incisión de a/e=0.15 ubicada a xfb=0.7 se observa que: En todos los modos de vibración, la viga con incisión se excita a la
frecuencia correspondiente de la viga sin incisión, los desplazamientos disminuyen porcentualmente en un intervalo comprendido entre 6.2% y 36.38%.
5.2.1 1 Viga 4x1000
Para la incisión de a/e=0.21 ubicada a xfn=0.73 se observa que: Si la viga con incisión se excita a la frecuencia de la viga sin incisión, los
desplazamientos del primer modo aumentan porcentualmente entre 0.58% y 10.72%. Una característica interesante es que para los modos 3 y 4, cuando se excitan con 1 N de fuerza, los desplazamientos disminuyen entre 1.3% y 19.1%; pero al excitarla a 5N de fuerza, los desplazamientos aumentan entre 1.09% y 22%. Por otro lado, para el modo 5 en ambos valores de fuerza los desplazamientos aumentan entre 3.38% y 21.61 %. En el resto de los modos los desplazamientos disminuyen entre 0.91% y 16.1%.
Se tiene para el modo 4 una frecuencia de excitación correspondiente a la viga ranura; y al excitar la viga a esta frecuencia se puede observar que para la excitación de 1 N los desplazamientos disminuyen entre 7% y 29.26%; mientras que a 5 N de excitación los desplazamientos aumentan entre 4.12 y 34.16%.
5.2.12 Viga 4x700
Para la incisión de a/e=0.21 ubicada a xfb=0.61 se observa que: Para el quinto modo excitado a la misma frecuencia que la viga sin incisión
los desplazamientos disminuyen entre 12.33% y 63.28%; para los modos 2 y 3 al excitarlos a la frecuencia de la viga sin ranura los desplazamientos diminuyen en un porcentaje entre 1.71 % y 9.67%. AI excitar los modos 2 y 3 a la frecuencia correspondiente a la viga con incisión, los desplazamientos aumentan entre 2.57% y 27.85%. Pero particularmente para el modo 3 de vibración con excitación de 5 N de fuerza los desplazamientos disminuyen entre 2.2% y 2.77%.
Para el modo cuatro excitando a la frecuencia de la viga sin incisión, los desplazamientos aumentan porcentualmente entre 8.95% y 46%. AI excitar este modo a la frecuencia de la viga con ranura, los desplazamientos se incrementan entre 13.65% y 57.43%.
5.2.13 Viga 4x800
Para la incisión de a/e=0.21 ubicada a xfb=0.66 se observa que: El primer modo excitado a la frecuencia de la viga sin ranura aumenta los
desplazamientos en un valor porcentual entre 2.94% y 5.81%.
5-26
CaDlmlo 5 : Presentacidn de resuliados.
El resto de los modos excitados a la frecuencia de la viga sin ranura disminuyen sus desplazamiento en un intervalo de 0.24% hasta 51.09%.
En el tercer modo se tienen dos frecuencias de excitación para el mismo modo (sin incisión y con incisión); al excitar este modo con la frecuencia correspondiente de la viga con ranura y a IN, los desplazamientos disminuyen entre 5.08% y 9.83%; y al excitarlo a 5N los desplazamientos aumentan entre 1.53% y 7.09%.
5.2.14 Viga 4x900
Para la incisión de de=0.21 ubicada a xf/l=0.7 se observa que: Los desplazamientos del primer modo son ligeramente mayores en un
intervalo de 0.04% hasta 5.044%. Si se excita la viga con las frecuencias correspondientes a los modos para
la viga sin ranura, los desplazamientos disminuyen entre 0.58% y 40.63%. Para el tercer modo se tiene la frecuencia de excitación correspondiente a
la viga con incisión y los valores de los desplazamientos aumentan entre 0.22% y
En el quinto modo excitando la viga a la frecuencia para la viga con incisión, 1 4.66%.
se observa que los desplazamientos disminuyen entre 6.53% y 21.27%.
Referencias
Nota: [I] para este capítulo consiste en el anexo de las pruebas experimentales, existente en el Departamento de Ingeniería Mecánica. Este forma parte del proyecto de COSNET clave ,547.97-P.
5-21
Capítulo 6
Concl us iones
En la presente investigación se desarrolló un trabajo experimental para tratar de determinar la existencia de fracturas de vigas en voladizo sometidas a vibración transversal forzada.
Las pruebas se realizaron cambiando los parámetros fijos de las probetas (vigas), como son: el espesor, la longitud (ver capítulo 4) y el material (se realizaron pruebas con acero y aluminio); con lo cual se obtuvo como consecuencia el cambio de masa y volumen de las probetas. Además se comparo el comportamiento para de dos diferentes materiales (aluminio y acero).
También se tuvieron cambios controlados en los parámetros independientes de entrada al sistema (fuerza y frecuencia de excitación).
Se obtuvieron relaciones cualitativas y cuantitativas de las variables a medir, tanto independientes (fuerza y frecuencia de excitación proporcionadas por el excitador electromagnético LING) como las dependientes (aceleración de los distintos puntos de interés de la viga).
El experimento fue diseñado y llevado a cabo en el laboratorio de diseño del Departamento de Ingeniería Mecánica del cenidet, tomando como base el equipo e instrumentos con los que se cuenta; y complementando este de acuerdo a las necesidades de manera que fuera posible realizar el experimento de acuerdo con la planeación de este.
Los valores de aceleración, voltaje de entrada al excitador electromagnético y fuerza de excitación obtenidos de la experimentación se presentan en tablas
6- I
CPDliulo 6. Conclusiones.
numéricas en forma de promedio, se muestra además información estadística adicional como la desviación estándar y el tamaño de muestra obtenidos de los valores medidos.
Basándose en los resultados obtenidos de la experimentación se observó que es necesario preparar una modelacion en algor similar a la realizada por Vázquez [I]; pero considerando algún mallado alternativo, diferente al usado por éste.
Los valores de los datos obtenidos de la experimentación no se'comparan directamente con los resultados numéricos obtenidos por Vázquez [I] mediante el paquete algor a causa de: -Para verificar la metodologia propuesta para el experimento desarrollado en el presente trabajo se usaron vigas de medidas comerciales, a las cuales se les realizo un proceso de rectificado en todas sus superficies. -La razon principal por la Cual la experimentación no se llevo a cabo con las mismas dimensiones, de las probetas que se presentan en la modelación numérica realizada por Vázquez [I]; obedece a que las secciones de las vigas que ahi se presentan no son comerciales; y .a causa de esto el costo en el maquinado de cualquiera de esas probetas se eleva considerablemente (entre 5 y 8 veces el costo de una vigas de sección comercial), por lo que en la etapa de la planeación del experimento se opto por trabajar con elementos comerciales. Además en esta etapa (planeación) se llegó a la conclusión de que resulta mas barato y relativamente fácil realizar otro modelado numérico en algor, tomando como base los resultados obtenidos de la experimentación. Pero esa modelación no se contemplo dentro del desarrolló del presente trabajo experimental.
6.1 Aportaciones al fenómeno estudiado
Se comprobó que para la determinación de la existencia de falla en el material, es necesario tomar en cuenta los cambios que se presentan tanto en las frecuencias naturales, como en los desplazamientos de los modos de vibración. Como se pudo ver en el capítulo 5, los desplazamientos para cada modo se relacionan directamente con la frecuencia de excitación, sin que sea muy importante la fuerza con la que se excita. Para establecer claramente la existencia de fractura, las señales medidas deben presentar un indicativo claro en cuento a desplazarnientos y cambio de frecuencias. La información que revela la existencia de fractura generalmente está contenida entre el tercer y sexto modo de vibración. Se determinó que para el número de modos de vibración a medir y consecuentemente, el número de puntos de interés (de acuerdo a la metodología aquí planteada), se debe tener en cuenta el instrumento con que se realizará la medición. Ya que cuanto más grande sea el número de modo (7, 8, 9...) que se desee excitar, la distancia entre los puntos de interés disminuye; y los desplazamientos se reducen (a causa de que se incrementa el valor de la
6-2

Caiillul" 6' Colicl"%mes
frecuencia de excitación). Por tanto, si la base del instrumento de medición ocupa un área considerable no podrá precisarse el punto de medición y los errores en este proceso tenderán a aumentar. Se tiene que para el cambio de desplazamiento de un modo en particular, las variaciones tienen un aumento o disminución generalmente no mayor del 10%. Se observó que el modo 4 de manera general no sigue la misma tendencia que el resto de los modos para cuando se excita la viga con incisión a la frecuencia que se obtiene para la viga sin incisión. Es decir, no presenta el mismo comportamiento de cambio en la disminución del desplazamiento al excitar la viga con incisión a la frecuencia de la viga sin incisión. Se encontró que el comportamiento del primer modo para la viga de aluminio no es el mismo que para las vigas de acero. Ya que al excitar la viga con y sin incisión a la misma frecuencia, el desplazamiento para la viga con incisión es mayor que par al viga sin incisión en el extremo de esta viga (mientras que en el acero se presenta lo contrario). Por último, se concluye que con este tipo de mediciones es posible determinar la existencia de fractura en este tipo de elementos, sobre la base de las mediciones realizadas de frecuencia y aceleración, ya que en general todos los elementos aquí probados se comportan de manera similar (con referencia a los desplazamientos de los modos 3 y mayores), cuando se presenta alguna incisión. Pero con las mediciones realizadas en este trabajo y con el equipo existente en el laboratorio del Departamento de Ingeniería Mecánica Sección Disetio, no es posible determinar específicamente la posición y tamaño de la incisión.
Con base en los resultados que aauí se muestran y el procedimiento con el que se llevaron a cabo las mediciones se puede iratar de establecer la metodología para aplicar este método de detección de fallas de elementos (aunque no sea posible con estos valores determinar la magnitud del daño) en la práctica.
Para cualquier dispositivo mecánico, elemento, mecanismo o máquina se puede proceder de la siguiente forma: 1. En la etapa conceptual del diseño es importante precisar y tener en cuenta
los elementos que tienen mayor posibilidad de falla o un menor tiempo de vida útil respeto del resto de los elementos que forman el dispositivo o máquina.
2. Caracterizar estos elementos cuando se encuentran en Óptimas condiciones (sin ninguna falla o discontinuidad), determinando sus frecuencias naturales y desplazamientos caracteristicos. Determinar la forma de monitorear estos elementos midiendo directa O indirectamente su comportamiento (pensar en cómo colocar los censores), tanto estáticamente como en operación del elemento (por ejemplo en una chumacera, en la cual no puede ser directamente analizado el estado de las pistas; pero sin embargo, al colocar un sensor en la periferia de este elemento o algún lugar accesible para el sensor se puede obtener un indicativo del cambio de estado en la pista del rodamiento).
3.
6-3

4.
5.
Tomar en cuenta el cambio en el ruido auditivo que se presente en el mecanismo o máquina. En caso de no poder realizar el monitoreo directamente en el elemento de interés, determinar alguna parte sensible del dispositivo que sea representativa de los cambios que se llevan a cabo en el interior de este dispositivo o máquina. Caracterizar todo el sistema o máquina en su conjunto. Tratar de adecuar estos pasos antes descritos a las necesidades que pudieran presentarse en distintas situaciones prácticas.
6.
6.2 Aportaciones al cenidet
Se diseñó y fabricó la base del excitador electromagnético, teniendo un costo de alrededor de 1/5 parte del precio de una base comercial. Se diseñó y elaboró un elemento de unión entre el excitador electromagnético y las probetas de prueba, el cual es capaz de absorber pequeñas flexiones a fin de evitar daño en el elemento móvil del excitador electromagnético. Se adquirió otro banco para pruebas de vibraciones de mayor masa y rigidez que los existes en el laboratorio de diseño del Departamento de Ingeniería Mecánica del cenidet. Se diseñó y verificó el sistema de monitoreo y control para el excitador electromagnético LING.
6.3 Aplicaciones.
Los resultados aquí obtenidos muestran que es posible, mediante el monitoreo periódico de elementos, determinar cuándo existe una fractura (si se cuenta con las señales del elemento antes de sufrir cualquier daño), y el método puede ser usado en la práctica. Los resultados experimentales obtenidos pueden servir como referencia para verificar el funcionamiento de programas propios o comerciales. Brinda un soporte para analizar el comportamiento sistemas simples e intentar extrapolar este método de monitoreo a otras configuraciones.
6.4 Recomendaciones.
Para tratar de mejorar los resultados obtenidos con esta investigacion se
1. Utilizar un sistema de excitación de fuerza y frecuencia controladas que permita excitar las diferentes configuraciones de viga en su primer modo; porque con el excitador empleado para este experimento se tiene buen control de la frecuencia en todo su intervalo de operación; pero no
recomienda:
6-4

Caoliulo 6: Conclusiones.
así de la fuerza de excitación para bajas frecuencias (menos de 20 H ~ ) , donde la señal de fuerza no siempre es senoidal.
2. Tratar de aplicar el método en algún sistema que contenga un elemento tipo viga para comparar resultados, ya que de acuerdo a Chondros y Dimarogonas la energía potencial de cada elemento en un sistema es diferente.
3. Probar con otro tipo de unión viga-excitador para verificar si este tiene alguna influencia sobre la señal de excitación que llega a la viga.
4. En las probetas de mayor espesor intentar producir una incisión más profunda, y monitorear el comportamiento de estas. A causa del proceso de manufactura en el presente trabajo no fue posible obtener incisiones mayores de 4.5 mm de profundidad con el cortador de 0.2 mm de espesor.
5. Elaborar incisiones en distintas longitudes de las vigas y comparar los resultados con los aquí obtenidos
6. También se recomienda considerar otro método alternativo de modelación numérica (en la forma de los elementos de maya o el criterio usado para la modelación) diferente al utilizado por Vázquez [ I ] . Donde los resultados tanto de frecuencia como de desplazamiento sean más similares a los obtenidos de laboratorio.
Referencias. [I] transversal", Tesis de Maestría CENIDET, Cuernavaca 1998.
VAZQUEZ, J., "Detección Teórica de Grietas en Vigas con vibración
6-5
Bibliografía
1. ABRAHAM, O.N.L. [Y] BRANDON, J.A., 1995, “The Modelling of the Opening and Closure of a Crack, Journal of Vibration and Acoustics, Vol. 117, pp, 370- 377.
2. COLLINS, K.R., 1992, “Free and Forced Longitudinal Vibrations of Cantilivared Bar With a Crack” Journal of Vibration and Acoustics, Vol. 114, pp.
3. CORTÉS, C. “Diseño y Construcción de un Sistema de Excitación Mecánico para Pruebas de Vibraciones Forzadas con Aplicación en Pruebas de Amortiguamiento por Fricción Seca”, Tesis de Maestría, 1997.
4. CHONDROS, T.G. [Y] DIMAROGONAS, A.D., 1980 “Identification of Cracks in Welded Joints of Complex Structures”, Journal of Sound and Vibration, Vol. 69,
5. DIEGO, U. “Análisis Experimental de la Influencia del Impacto en Vigas en Voladizo Sometidas a Vibración Transversal Forzada”, Tesis de Maestría, 1998.
171-177.
NO. 4, pp. 531-538.
6. EWINS, D.J., “Modal Testina: Theory and Practice” cuarta reimpresion, RESEARCH STUDIES PRESS LTD. Taunton. 1995.
7. GENTA, G, Vibration of Structures and Machines, Segunda edición, Springer VerlagNew York, 1995, p 414.
8. HARRIS, C. M CREDE, C., 1961, “Shock and Vibration Handbook”, Vol 2, Mc Graw Hill., E:U:
9. HARTOG J.P., Mecánica de las Vibraciones, Cuarta edición, Mc Graw Hill, ~
México, 1980. IO.HEARN, G, [VI TESTA, R.B., 1991, “Modal Analysis for Damage Detection in
Structures”, Journal of Structural Engineering, Vol. 117, No. 10, pp. 3042-3063. 11. HOLMAN J.P., MÉTODOS EXPERIMENTALES PARA INGENIEROS, Cuarta
edición, Mc Graw Hill, México 1996. 12.LEE, H.P. [Y] NG, T.Y., 1994, “Natural Frequencies and Modes for the Flexural
Vibration of a Crack Beam”, Applied Acoustics, Vol. 42, pp. 151-163. 13.LEISSA, A.W. [VI SONALLA, M. I., 1991 “Vibrations of Cantiliver Beams With
Various Initial Conditions”, Journal of Sound and Vibration, Vol. 150, No 1, pp
14.LIANG, R.Y. et al, 1992, “Theoretical Study of Crack Induced Eigenfrequency Changes on Beam Structures”, Journal of Engineering Mechanics, Vol 118, No
15. LONG-YUAN, 1991, “Interaction Of Forced And Parametrically excited Vibrations”, Computers & Structures, Vol. 40 No 3, pp 615-618.
16. M O T , R.,Diseno de Elementos de Máquinas, segunda edición, Prentice Hall, México 1995.
17. “Operating Instructions” en manual de KISTLER Instrument Corporation. Quartz Force Links, type 9312A.
18. “Operating Instructions’’ en manual de KISTLER Instrument Corporation. Impuse Force Hammers, types 9722A(X). 9724A(X), 9726A(X), 9728A2000 and Accesories.
83-99.
2, pp. 384-397.
19.”0Perating InStrUctiOnS” en manual de Kistler. Coupler power supply type 5134. 20. “Operating Instructions” en manual de Kictler. Dual Mode Amplifier type 5 0 1 0 ~
and 5010BM2 21. “Operating Instructions”, en Manual de KISTLER. PiezoBEAM Accelerometers
type 86286,8630B, 86328,86346,86366,86386, 86906,86928, 22. “Operating Instructions”, en Manual de KISTLER. PiezoBEAM Accelerometers
type 8702,8704,8710,8720,8722,8724,8726,8728,8730,8790,8792 Series. 23.QUIAN, G.L. [Y] JIANG, J.S., 1990, “The Dynamic Behaviour and Crack
Detection of a Beam With a Crack, Journal of Sound and Vibration, Vol. 138,
24. RAKOWSKI, J., 1991 “A Critical Analysis of cuadratic Beam Finite Elements” International Journal for Numerical Methods in Engineering, Vol. 3 1 ~ pp 949-946
25.SHEN, M. [Yl CHU, Y.C., 1992, “Vibrations of Beams With a Fatigue Crack, Computers & Structures, .Vol. 45, No. 1, pp. 73-93.
26.SHEN, M. [y PIERRE, C., 1990, “Natural Modes of Bernoulli-Euler Beams With Symmetrical Cracks”, Journal of Sound and Vibration, Vol. 38, No 1, pp,
27.SHEN, M.H. y] TAYLOR, J.E., 1991, “An Identification Problem For Vibrating Cracked Beams”, Journal of Sound And Vibration, Vol. 150, No. 3, pp 457-484.
28.SHIGLEY, J., Diseño en Inqeniería Mecánica, cuarta edición en español, Mc Graw Hill, México 1990, p 261.
29. SOTELO, C.A. “Análisis Numérico y Experimental del Impacto en Vigas Con Vibración Transversal”, Tesis de Maestría CENIDET, 1995.
30.TABADOR, M. y] NAYFEH , A.H., 1997, “An Experimental Investigation of Multimode Responses in a Cantilever Beam”, Journal of Vibration and Acoustics, Vol. 119, No. 4, PP 532-538.
31 ,THoMSoN, w. T., Teoría de Vibraciones con ADliCaCiOneS. Prentice, Hall Hispanoamericana, México,.l981.
32. User Manual, Installatión and Operating Manual PA100E-CE9 LDS amplifier,
NO. 2, pp 233-243.
11 5-1 34.
manual número 936221. 33. User Manual, Installatión and Operating Manual V400 Series Vibrators, en
manual LDS numero 892301.
Manual (HP 3566Al3567A). 34. User‘s Guide en manual Hewlett Packard. Measurement Hardware Service
35 User-s Guide en manual Hewlett Packard. Programming Manual (HP ~~ ~
3566N3567A). 36. User-s Guide en manual Hewlett Packard. Standar Data Format Utilities. 37 VAZAQUEZ. J.. “Detección Teórica de Grietas en Vigas con Vibración
Transversai”, Tesis de Maestría CENIDET, 1998. 38.YAGASAK1, K., SAKATA, M., M KIMURA, K., 1990, ”Dynamics of a Weakly
Nonlinear System Subjected to Parametric and External Excitation” Transaction of the ASME. Journal of applied Mechanics, Vol. 57, pp. 209-217.

Apéndice A
Planos técnicos
En este apéndice se presentan los planos técnicos de diferentes elementos usados en la experimentación. Se presentan los planos de:
Árbol para cortador. Este elemento se diserio y utilizó para sujetar el cortador de disco, el cual sirvió para realizar las incisiones en las vigas de prueba. Base del excitador. Base disenada para asegurar el excitador en su posición de trabajo. Tornillo de sujeción. Junto con la base del excitador aseguran la posición de trabajo del excitador. Bloques de madera. Los bloques de madera principal y secundarios sirven para dar una altura determinada a la base del excitador. Banco del excitador. Se compone de bloques de madera además de la estructura usada por Cortés 1997. Dispositivo experimental. Compuesto de los elementos físicos que forman parte de experimento. Unión viga-excitador. Elemento que sirve de unión entre la viga y el excitador electromagnético. Tornillo para alambre. Elemento (4) que forma parte de la unión viga-excitador para la sujeción del alambre recomendado por Ewins 1995.
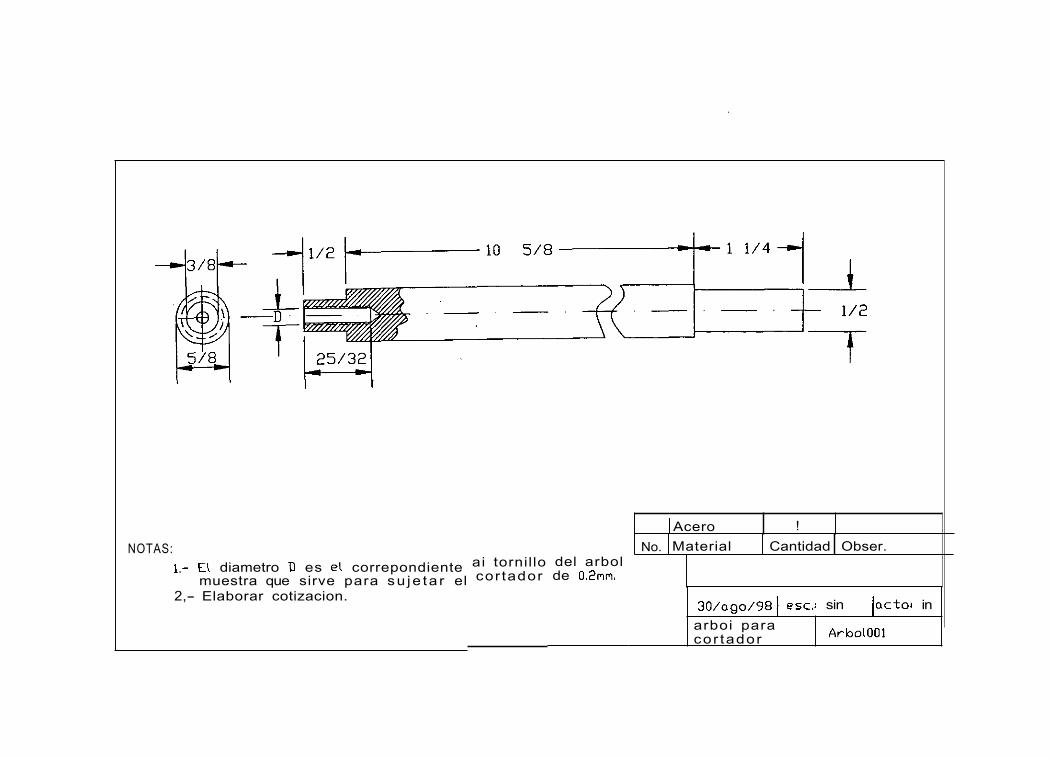
NOTAS: 1,- El diametro D es et correpondiente
muestra que sirve para su je ta r el 2,- Elaborar cotizacion.
I Acero
ai tornil lo cor tador
!
del arbol de 0.2mm.
No. Cantidad Obser. Material
30/ago/98) esc.: sin [acto: in arboi para cor tador ArbolOOl
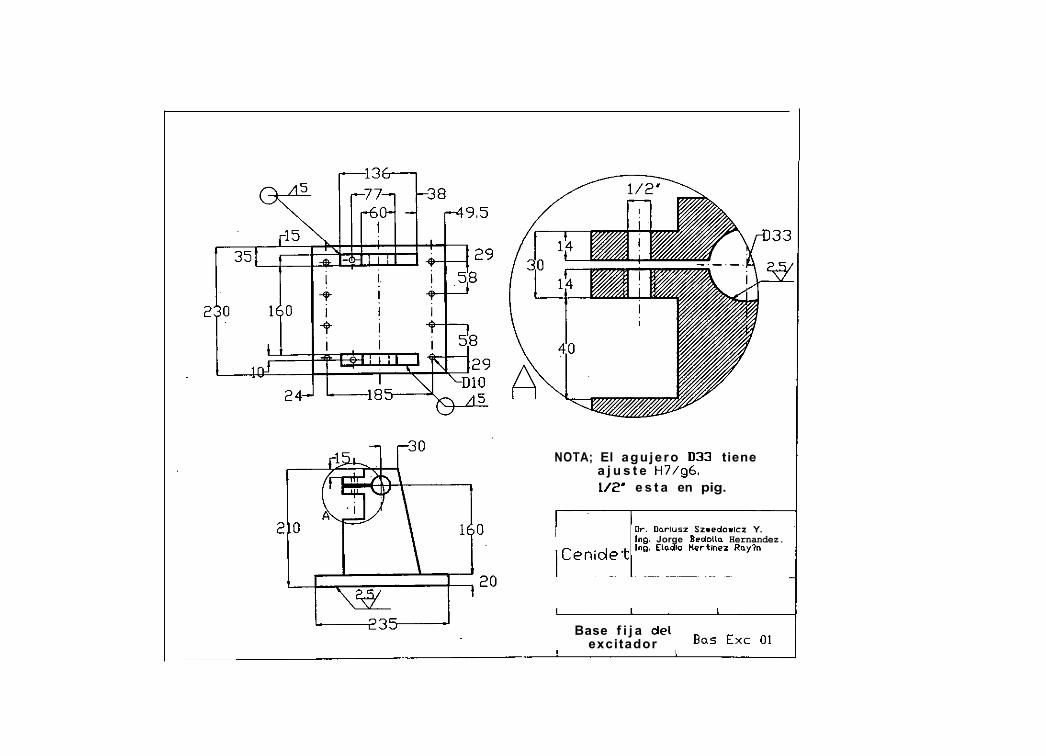
NOTA; El agu jero 033 tiene a j u s t e H7/g6. 1/2' e s t a en pig.
Dr. Doriusz Srredoiicz Y. Ing. Jorge Bedollo Hernandez. hg , Eladlo Hertinez Roy?" Cenidet
Base f i j a del excitador Bas Exc O1

. - D M D33
cenldet
NOTAS, I MATAR FILOS 2 MATERIAL TUBO DE ACERO DE 1 PULGADA CED. XXS (ALSI 303 O 304 INOXIDABLE) O SUSTITUIR CON EQUIVALENTE CON DIAMETRO INTERIOR DE 15.21 IVJ. 3 CHFLANES DE 2x2 4 DIHENSION K DE ACUERDO A LA ROSCA DEL EOUIPU CON SALIDA MENOR A 3
Or. Doriusz SIiedO.ICz Y. Ing. Jorge Bedollo Hernandez
1.9. Eladlo Herthez Rayon
2.7 SS
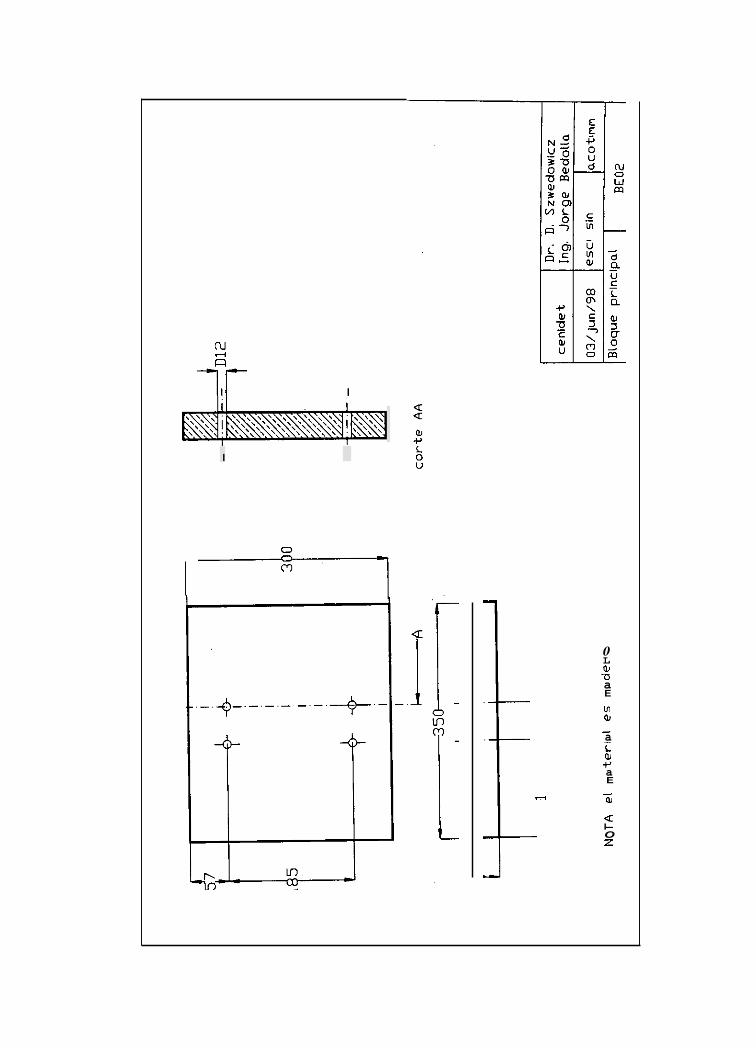
cu 3
iir I
I
ñ o
a
L QJ -0
E VI QJ - a .- L (u c> E
GI
Q I- O z
a
- 3
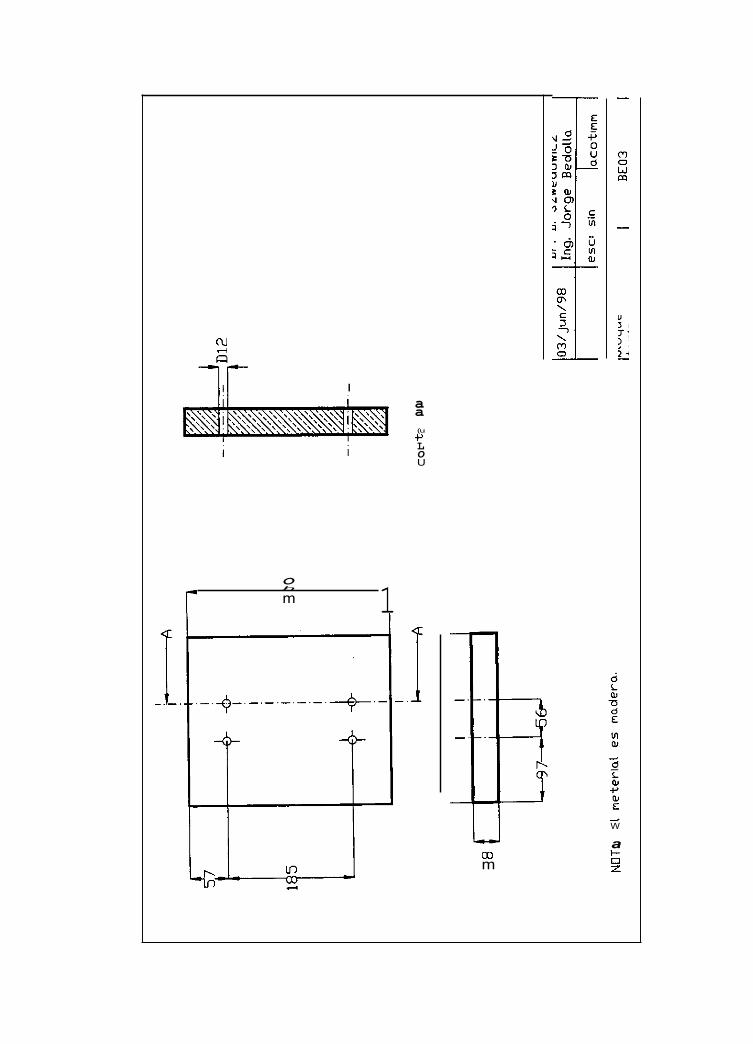
ni 3
iir I
r O h
m 1
a a (u + L O U
- W
a c o z co m
U
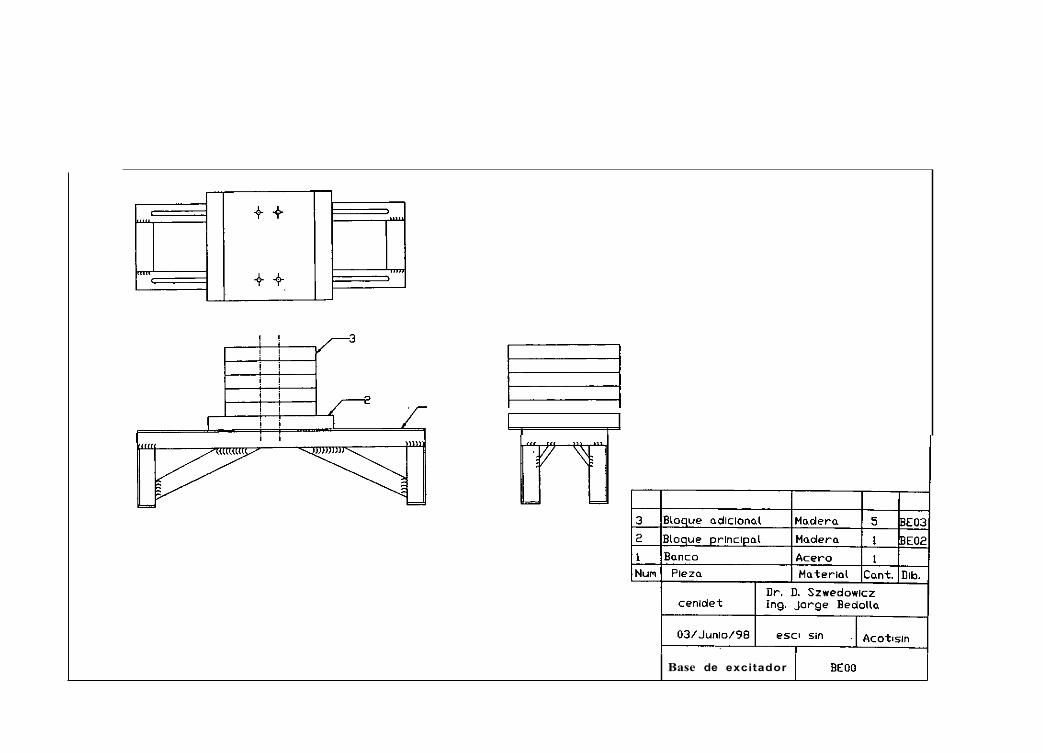
D
Base de excitador
I I
BE00

I I --+
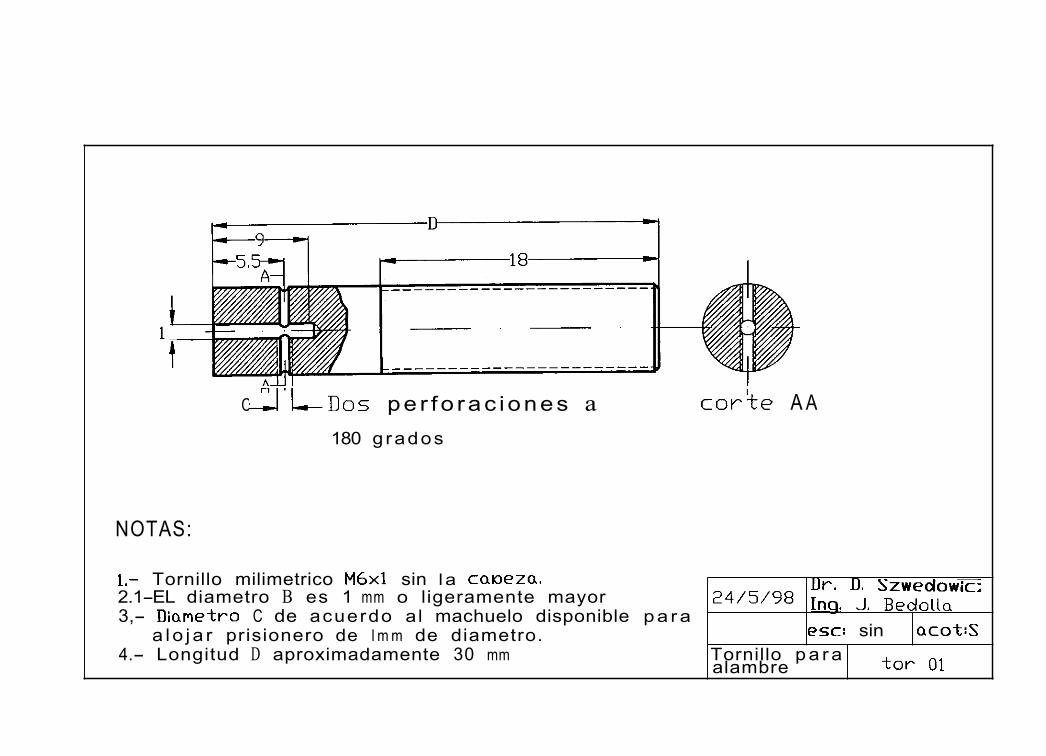
t
1.- Tornillo milimetrico M6x1 sin l a ca-eza. 2.1-EL diametro B es 1 mm o ligeramente mayor 3,- Diametro C de acuerdo al machuelo disponible pa ra
4.- Longitud D aproximadamente 30 mm a l o j a r prisionero de l m m de diametro.
C ~ ' L D O S pe r fo rac iones a cor ' te A A 180 g rados
D r . D. Szwedowic;
esc: sin acot:S 24'5'98 Ina. J. Bedolla
Tornillo p a r a tor o1 alambre
NOTAS:

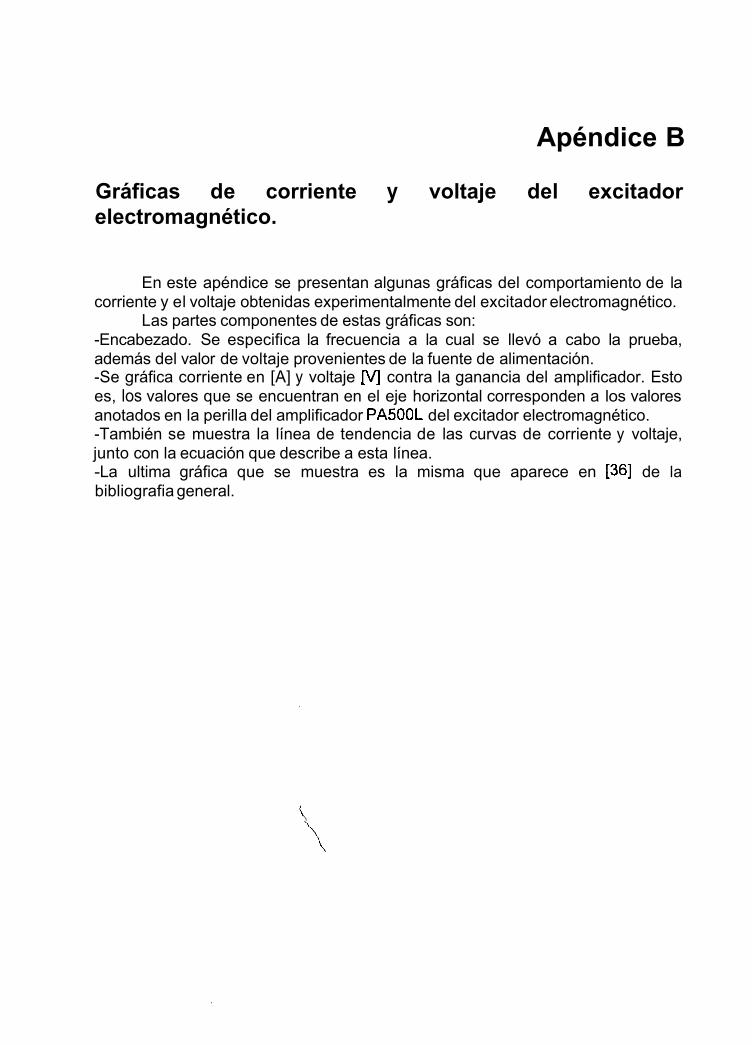
Apéndice B
Gráficas de corriente y voltaje del excitador electromagnético.
En este apéndice se presentan algunas gráficas del comportamiento de la
Las partes componentes de estas gráficas son: corriente y el voltaje obtenidas experimentalmente del excitador electromagnético.
-Encabezado. Se especifica la frecuencia a la cual se llevó a cabo la prueba, además del valor de voltaje provenientes de la fuente de alimentación. -Se gráfica corriente en [A] y voltaje M contra la ganancia del amplificador. Esto es, los valores que se encuentran en el eje horizontal corresponden a los valores anotados en la perilla del amplificador PASOOL del excitador electromagnético. -También se muestra la línea de tendencia de las curvas de corriente y voltaje, junto con la ecuación que describe a esta línea. -La ultima gráfica que se muestra es la misma que aparece en [36] de la bibliografia general.

I I i I I o
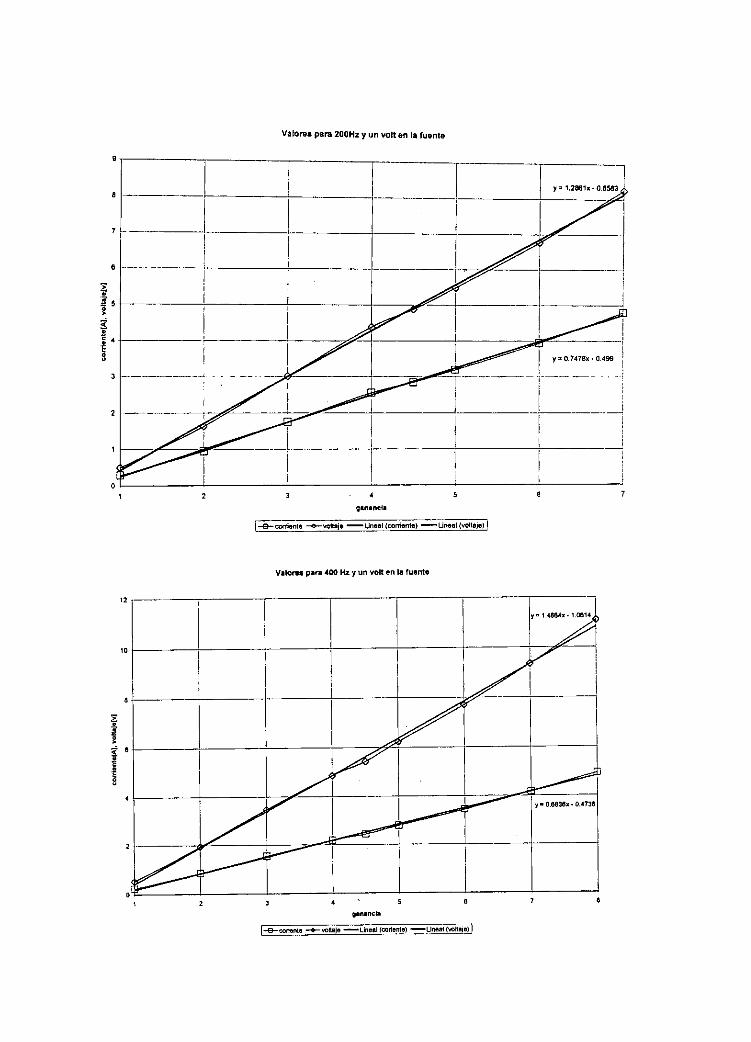
7

12
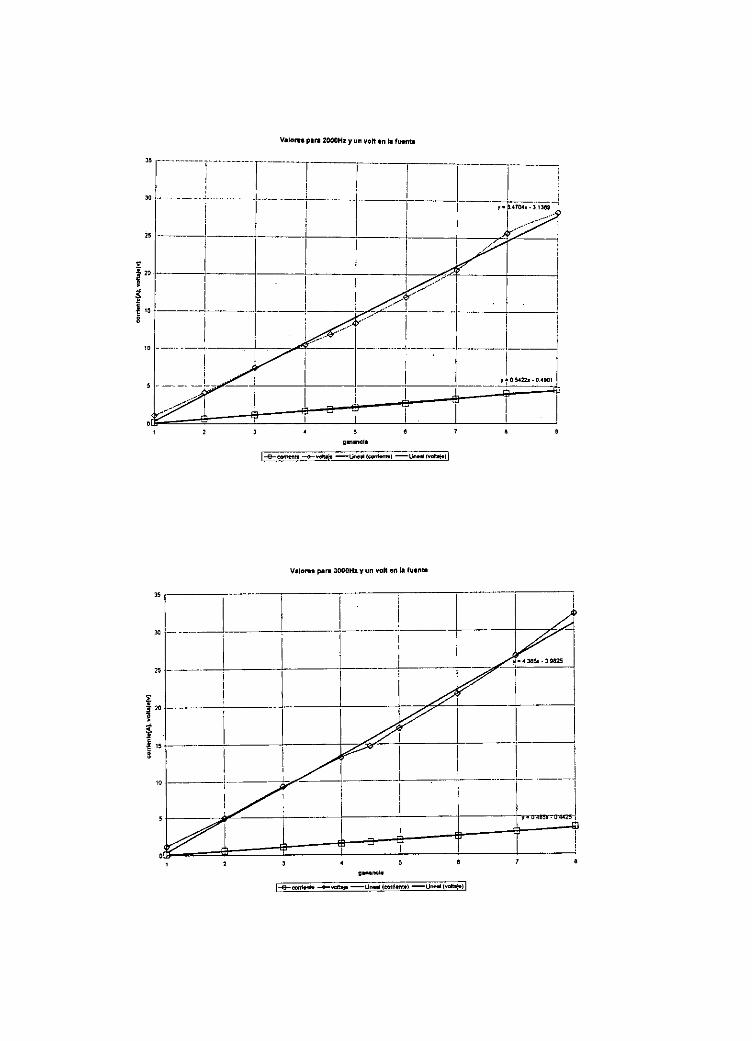

Apéndice C
<< 9 9 Gráficas de los valores de z . En este apéndice se muestran las gráficas hechas en mathcad a partir de
las ecuaciones de Euler para determinar los vhores de “z” que sirven para encontrar los valores de las frecuencias naturales (ver capitulo 4).
En la última gráfica se tiene en el eje horizontal todo el intervalo de valores con el cual se obtuvieron las 10 gráficas.
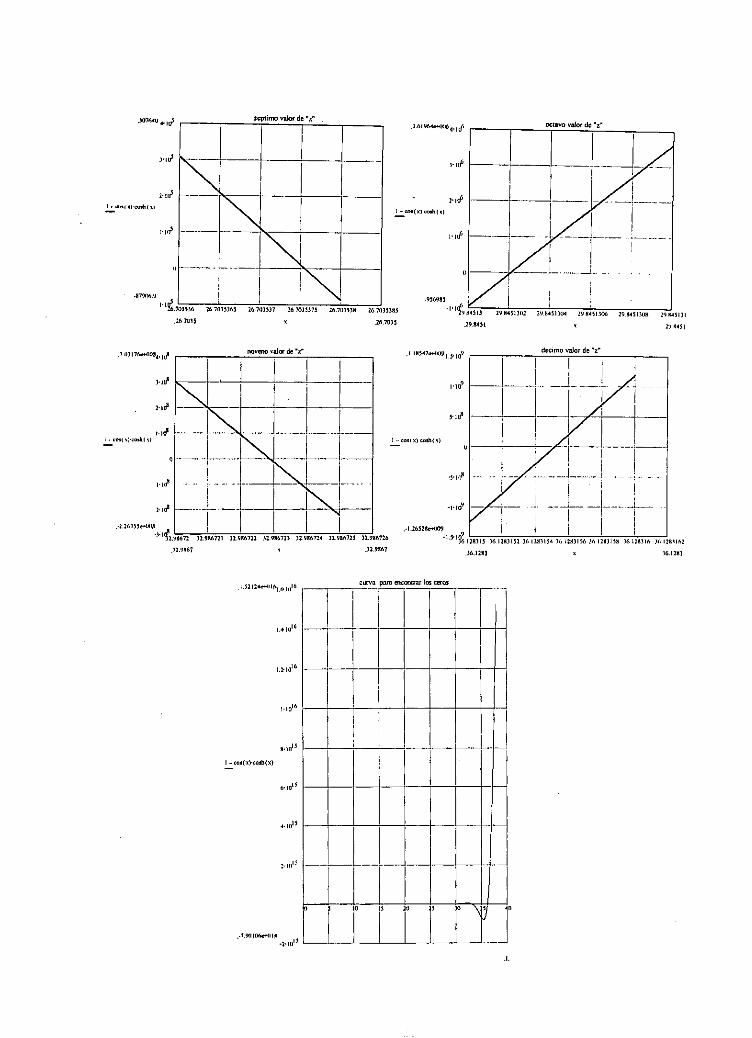
.I.

Apéndice D
Acelerómetros usados, equipo y diagrama de flujo del programa en matlab.
Acelerórnetro 1 Tipo: 8720A500 Serie: C110239 Rango: +500g. Sensibilidad: 9.79 rnvíg. Sensibilidad transversal: 0.9%. Frecuencia de resonancia: 54.0 kHz. Temperatura de operación: -54OC - 120OC.
Acelerórnetro 2 Tipo: 8628850 Serie: C109004 Rango: +50g. Sensibilidad: 99.2 rnVlg. Sensibilidad transversal: c 1%. Frecuencia de resonancia: 22 kHz. Temperatura de operación: O - 65OC.
Acelerórnetro 3 Tipo: 8636C50 Serie: C106387 Rango: +50g. Sensibilidad: 103.8 rnV/g. Sensibilidad transversal: L 1 %. Frecuencia de resonancia: 22 kHz. Temperatura de operación: O - 65OC.
Acelerórnetro 4 Tipo: 8630C50 Serie: C106965 Rango: 250g. Sensibilidad: 100.2 mVlg. Sensibilidad transversal: s 1%. Frecuencia de resonancia: 22 kHz. Temperatura de operación: O - 65OC.
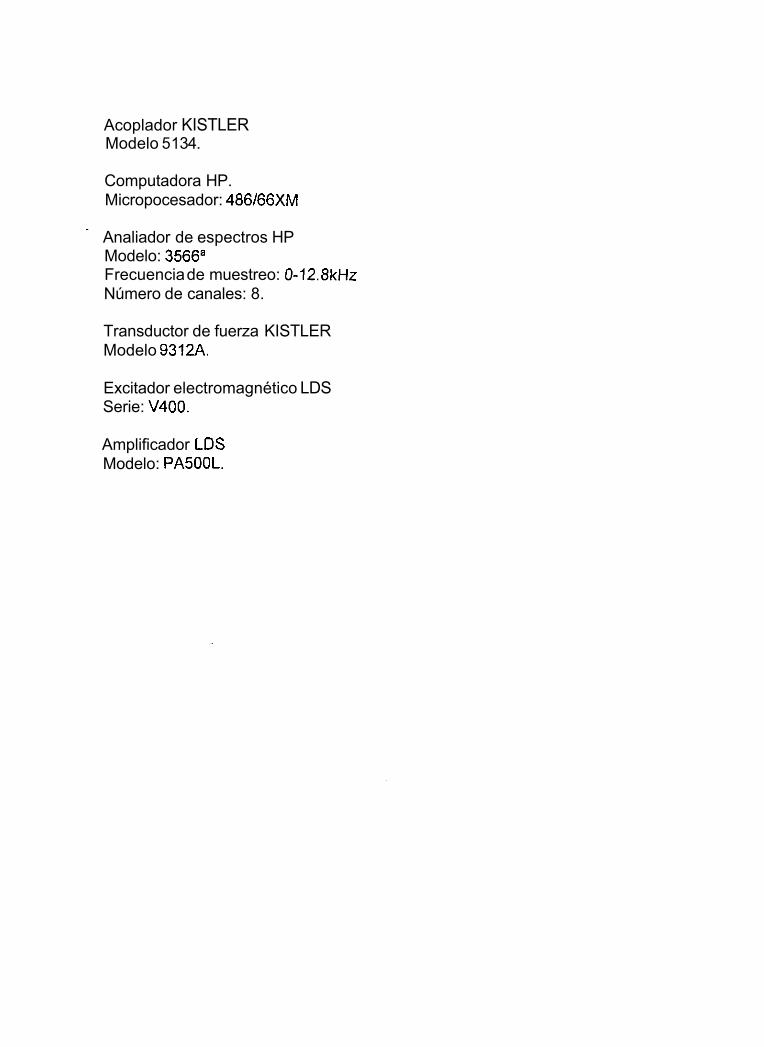
Acoplador KISTLER Modelo 51 34.
Computadora HP. Micropocesador: 486l66XM
Analiador de espectros HP Modelo: 3566a Frecuencia de muestreo: 0-12.8kHz Número de canales: 8.
Transductor de fuerza KISTLER Modelo 9312A.
Excitador electromagnético LDS Serie: V400.
Amplificador LOS Modelo: PA500L.

Diagrama de flujo del programa en matlab que calcula los valores promedio, desviación estandar, desplazamientos a partir de las señales grabadas de los acelerómetros.
/ /
inicio
de trabaio
Cargar datos
2 encontrar puntos consecutivos que cambian su sino
I
Se forman 21 vectores con los puntos contenidos para 21 ciclos de la señal seno (un vector por ciclo).
Se establece un valor máximo positivo y otro valor máximo negativo para cada ciclo
Se establece un vector con todos los valores positivos y otro vector con todos los valores negativos
1 Se realizan los cálculos de promedio, desviación estándar y error maximo para cada vector
Se determina la amplitud pico-pico de la señal seno en función de sus valores promedio, y se calcula la diferencia existente entre el eje de la señal seno y el eje horizontal.del analizador I Se calcula el valor de los desplazamientos a partir de i los valores de aceleración
1 Se despliegan resultados
6 Fin.

Apéndice E
Tablas de frecuencias usadas para la experimentación.
El grupo de tablas numéricas que se muestran en esta sección, relacionan el número de modo con la frecuencia de excitación usada para cada una de las pruebas en ambos caso de fuerza ( IN y 5N).
Las tablas están organizadas de la siguiente forma: En el encabezado contienen la designación de viga (la cual corresponde a
la descrita en el capitulo 3); se especifica que es frecuencia de excitación en Hz. En el cuerpo de las tablas la primera columna de izquierda a derecha
representa el numero de modo de la viga (se encuentra encabezada por la leyenda "Modo"), la segunda columna (encabezada por la leyenda sí9 contiene los valores de frecuencia natural correspondiente a cada numero de modo para la viga sin incisión.
La tercera y cuarta columna (cuando existe cuarta columna) contienen los valores de frecuencia (especifica los valores de frecuencia con los cuales se llevo a cabo la prueba y pueden ser mas de uno) de los respectivos modos de la viga con alguna incisión; en el encabezada de estas columnas se especifica la profundidad de la incisión y la posición que esta tiene con respecto del punto de empotramiento de la viga.
Estas tablas contienen todas las frecuencias y todas las designaciones de viga con las que se llevaron a cabo las pruebas experimentales; por lo que si en cualquier tabla o gráfico (de todo este apartada de resultados o en el cuerpo de la tesis) no se encuentra contenida la información completa de frecuencias de excitación ylo modo, bastara con revisar los datos que se incluyen en esa tabla (o gráfico) y consultar las tablas que aquí se muestran para conocer el complemento de los valores.

viga 1x1000 frecuencia de excitación e n [Hz] Modo s/f ffl.25 f0.51
1 6 6 6 2 40 40 40 3 111 111 111
1 O8 4 217 217 217
xf/l=O.73 xf/i=0.95
212 5y5b 357 357 357
36 1 360
534 530 6y6b 538 538 538
viga 1x900 frecuancia de excitación en [Hz] Mcdc s/f f0.25 w . 5 i
xi/l=0.7 xf/I=O.54 1 2 49 49 49 3 137 137 137
132 4 267 267 267
263
442 442 6 y G b E65 665 665
5y5b 445 445 445
646
viga 1 x800 frecuencia ¿e excitzción en [Hz] Modo s/f 10.25 ffl.51
#f/l=0.6& xf/I=0.93 I 10 2 62 62 62 3 172 ;72 172
1 Ed 4 334 334 334
337 5 556 556 556
550 545 6 828 828 828
e16 795
viga 1 x700 irecuencia d exctiación en [Hz] Mcdo s/í 10.25 f0.51
xi/i=0.61 xf/l=O.92 I 12 2 80 80 80
76 3 220 220 220
213 4 436 436 43E
5 y 5 b 716 716 71s 688
Sy6b 1076 1076 1076 1066
430
viga 2x1000 frecuencia de excitación en [Hz] Modo s/í fo.12 f0.25
xf/1=0.73 xfkO.73 1 12 2 78 78 78 3 216 216 216
212 4 434 434 434
426 424 5 y 5 b 702 702 702
696 696
1074 E y E b 1080 1080 1080
viga 2x900 frecuancia d e excitación en [Hz] Modo S / í fO.12 f0.25
xf/I=O.7 xf/i=0.7 1 16 16 2 96 96 96 3 268 260 26 8
262 2CE 4 525 526 526
516 514 5y5b 846 846 ti46
840 6 y 5 4 1320 1320 i 320
Í 360
V i i á 2x800 frecuancia d e excitacijn en [Hz] Modo s/f f0.12 10.25
I 20 20 20 2 120 120 1 20
j i 7 3 326 326 326
346 338 4 658 658 E58
652 647 5y5b 1102 1102 ' 1302
io84
xí/i=0.66 x?/l=0.66

.
viga 3x1 O00 frecuencia d exctiacibn en [Hz] Modo s/f 10.15
1 22 22 2 128 128 3 372 372
362 4 688 688
5 y 5 0 1204 1204
viga 3x900 frecuencia d exctiacibn en [Hz] Modo sil m.15
1 26 26 2 15E 156 3 454 454 4 828 828
5 y 5 5 1444 34144 1436
xf/1=0.73
xf/I=0.7
viga 3x800 'frecuencia ti exctiacibn en [Hz] Modo c/f f0.15
i 32 22 2 200 260
1 so 3 554 554 4 1126 1126
1094
xf/l=0.60
viga 4x1 O00 frecuencia d exctiacibn en [Hz] Modo s/f f0.21
1 14 14 2 90 90 3 248 248 4 48E 486
482 5 y 5 b 812 812 6 y 6 b 1200 1200
viga 4x900 frecuencia d exctiacibn en [Ez]
xf/I=0.73
Modo s/f 70.21 xf/i=O, 7
1 18 18 2 110 ' 710 2 308 308
300 4 596 596
5 y 5 b 1014 1014 1 O00
viga 4x800 frecuencia d exctiacion en [Hr] Modo s/í f0.21
xf/i=0.66 1 22 22 2 138 i 38 3 386 386
582 4 756 756
5 y 5 b 1230 1230
viiz 4x700 frecuenciz d exctiación en [Hz!
M O B 0 s/f M.21 >ci/l=0.61
1 2e 26 2 180 ' 180
176 2 496 495
a52 4 1008 1008
1000 5 y 5 b 1600 1000