WIKI, Coordenadas (...)
73
Click here to load reader
Transcript of WIKI, Coordenadas (...)

ContenidosArtículos
Coordenadas esféricas 1Coordenadas polares 6Radio (geometría) 16Colatitud 17Acimut 18Radián 20Conjunto abierto 23Coordenadas cartesianas 26Coordenadas cilíndricas 32Factores de escala (coordenadas ortogonales) 36Gradiente 37Divergencia (matemática) 40Rotacional 42Operador laplaciano 48Suma de Riemann 51Teorema fundamental del cálculo 53Partición de un conjunto 57Intervalo (matemática) 58Integración de Riemann 64
ReferenciasFuentes y contribuyentes del artículo 69Fuentes de imagen, Licencias y contribuyentes 70
Licencias de artículosLicencia 72

Coordenadas esféricas 1
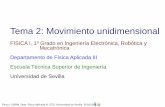
Coordenadas esféricasEl sistema de coordenadas esféricasse basa en la misma idea que lascoordenadas polares y se utiliza paradeterminar la posición espacial de unpunto mediante una distancia y dosángulos.
En consecuencia, un punto P quedarepresentado por un conjunto de tresmagnitudes: el radio , el ángulopolar o colatitud θ y el azimut φ.
Algunos autores utilizan la latitud, enlugar de colatitud, en cuyo caso sumargen es de -90º a 90º (de -π/2 a π/2radianes), siendo el cero el plano XY.También puede variar la medida delacimut, según se mida el ángulo ensentido reloj o contrarreloj, y de 0º a360º (0 a 2π en radianes) o de -180º a +180º (-π a π).
Se debe tener en cuenta qué convención utiliza un autor determinado.
Convenciones utilizadas
Convención estadounidenseActualmente, el convenio usado en los EEUU es el mismo que el europeo. Para denotar el ángulo azimutal se usa θ ypara referirse al polar, latitud o colatitud se usa φ.
Convención no estadounidense

Coordenadas esféricas 2
Sin embargo, la mayoría de los físicos, ingenierosy matemáticos no norteamericanos intercambianlos símbolos θ y φ, siendo:•• θ la colatitud, de 0º a 180º•• φ el azimutal, de 0º a 360ºEsta es la convención que se sigue en este artículo.En el sistema internacional, los rangos de variaciónde las tres coordenadas son:
La coordenada radial es siempre positiva. Sireduciendo el valor de llega a alcanzarse elvalor 0, a partir de ahí, ; vuelve a aumentar, peroθ pasa a valer π-θ y φ aumenta o disminuye en πradianes.
Relación con otros sistemas decoordenadas
Relación con las coordenadas cartesianasSobre los conjuntos abiertos:
Existe una correspondencia unívoca entre las coordenadas cartesianas y las esféricas, definidas porlas relaciones:
Estas relaciones se hacen singulares cuando tratan de extenderse al propio eje , donde , en el cualφ, no está definida. Además, φ no es continua en ningún punto tal que .La función inversa entre los dos mismos abiertos puede escribirse en términos de las relaciones inversas:

Coordenadas esféricas 3
Coordenadas esféricas y ejes cartesianos relacionados.
Relación con las coordenadascilíndricas
Como sistema intermedio entre lascoordenadas cartesianas y las esféricas, estáel de las coordenadas cilíndricas, que serelaciona con el de las esféricas por lasrelaciones
y sus inversas
Líneas y superficiescoordenadas
Las líneas coordenadas son aquellas que seobtienen variando una de las coordenadas ymanteniendo fijas las otras dos. Para lascoordenadas esféricas, estas son:• Líneas coordenadas : Semirrectas radiales partiendo del origen de coordenadas.• Líneas coordenadas θ: Semicírculos verticales (meridianos)• Líneas coordenadas φ: Circunferencias horizontales (paralelos).
Las superficies coordenadas son aquellas que se obtienen fijando sucesivamente cada una de las coordenadas de unpunto. Para este sistema son:• Superficies =cte.: Esferas con centro en el origen de coordenadas.•• Superficies θ=cte.: Conos rectos con vértice en el origen.•• Superficies φ=cte.: Semiplanos verticales.Las líneas y superficies coordenadas de este sistema son perpendiculares dos a dos en cada punto. Por ello, éste es unsistema ortogonal.

Coordenadas esféricas 4
Base coordenadaA partir del sistema de coordenadas esféricas puede definirse una base vectorial en cada punto del espacio, mediantelos vectores tangentes a las líneas coordenadas. Esta nueva base puede relacionarse con la base fundamental de lascoordenadas cartesianas mediante las relaciones
e inversamente
En el cálculo de esta base se obtienen los factores de escala
Disponiendo de la base de coordenadas esféricas se obtiene que la expresión del vector de posición en estascoordenadas es
Nótese que no aparecen término en o . La dependencia en estas coordenadas está oculta en el vector .
Diferenciales de línea, superficie y volumen
Diferencial de líneaUn desplazamiento infinitesimal, expresado en coordenadas esféricas, viene dado por
Diferenciales de superficieLa expresión general de un diferencial de superficie en coordenadas curvilíneas es complicada. Sin embargo, para elcaso de que se trate de una superficie coordenada, el resultado es
y expresiones análogas para las otras dos superficies coordenadas.En el caso particular de las coordenadas esféricas, los diferenciales de superficie son
• =cte: • θ=cte: • φ=cte:

Coordenadas esféricas 5
Diferencial de volumenEl volumen de un elemento en coordenadas curvilíneas equivale al producto del jacobiano de la transformación,multiplicado por los tres diferenciales. El jacobiano, a su vez, es igual al producto de los tres factores de escala, porlo que
que para coordenadas esféricas da
Operadores diferenciales en coordenadas esféricasEl gradiente, la divergencia, el rotacional y el laplaciano poseen expresiones particulares en coordenadas esféricas.Estas son:•• Gradiente
•• Divergencia
•• Rotacional
•• Laplaciano

Coordenadas polares 6
Coordenadas polares
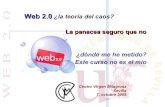
Localización de un punto en coordenadas polares.
Las coordenadas polares o sistemas polares son un sistema decoordenadas bidimensional en el cual cada punto del plano sedetermina por un ángulo y una distancia, ampliamente utilizados enfísica y trigonometría.
De manera más precisa, se toman: un punto O del plano, al que se lellama origen o polo, y una recta dirigida (o rayo, o segmento OL) quepasa por O, llamada eje polar (equivalente al eje x del sistemacartesiano), como sistema de referencia. Con este sistema de referenciay una unidad de medida métrica (para poder asignar distancias entrecada par de puntos del plano), todo punto P del plano corresponde a unpar ordenado (r, θ) donde r es la distancia de P al origen y θ es elángulo formado entre el eje polar y la recta dirigida OP que va de O aP. El valor θ crece en sentido antihorario y decrece en sentido horario.La distancia r (r ≥ 0) se conoce como la «coordenada radial» o «radiovector», mientras que el ángulo es la «coordenada angular» o «ángulo polar».
En el caso del origen, O, el valor de r es cero, pero el valor de θ es indefinido. En ocasiones se adopta la convenciónde representar el origen por (0,0º).
Historia
Sistema de coordenadas polares con variosángulos medidos en grados.
Si bien existen ejemplos de que los conceptos de ángulo y radio seconocen y manejan desde la antigüedad, no es sino hasta el siglo XVII,posterior a la invención de la geometría analítica, en que se puedehablar del concepto formal de sistema coordenadas polares.
Los primeros usos empíricos de relaciones entre ángulos y distanciasse relacionan con aplicaciones a la navegación y el estudio de labóveda celeste. El astrónomo Hiparco (190 a. C.-120 a. C.) creó unatabla trigonométrica que daba la longitud de una cuerda en función delángulo y existen referencias del uso de coordenadas polares paraestablecer la posición de las estrellas. En Sobre las espirales,Arquímedes describe la espiral de Arquímedes, una función cuyo radiodepende del ángulo. Sin embargo, estas aplicaciones no hacían uso deun sistema de coordenadas como medio de localizar puntos en el plano,situación análoga al estado de la geometría antes de la invención de lageometría analítica.
En tiempos modernos, Grégoire de Saint-Vincent y Bonaventura Cavalieri introdujeron de forma independiente elconcepto a mediados del siglo XVII en la solución de problemas geométricos. Saint-Vincent escribió sobre este temaen 1625 y publicó sus trabajos en 1647, mientras que Cavalieri publicó sus escritos en 1635 y una versión corregidaen 1653. Cavalieri utilizó en primer lugar las coordenadas polares para resolver un problema relacionado con el áreadentro de una espiral de Arquímedes. Blaise Pascal utilizó posteriormente las coordenadas polares para calcular lalongitud de arcos parabólicos.Sin embargo, el concepto abstracto de sistema de coordenada polar se debe a Sir Isaac Newton, quien en su Método de las fluxiones escrito en 1671 y publicado en 1736, introduce ocho nuevos sistemas de coordenadas (además de las

Coordenadas polares 7
cartesianas) para resolver problemas relativos a tangentes y curvas, uno de los cuales, el séptimo, es el decoordenadas polares. En el periódico Acta Eruditorum Jacob Bernoulli utilizó en 1691 un sistema con un punto enuna línea, llamándolos polo y eje polar respectivamente. Las coordenadas se determinaban mediante la distancia alpolo y el ángulo respecto al eje polar. El trabajo de Bernoulli sirvió de base para encontrar el radio de curvatura deciertas curvas expresadas en este sistema de coordenadas.El término actual de coordenadas polares se atribuye a Gregorio Fontana, y fue utilizado por los escritores italianosdel siglo XVIII. El término aparece por primera vez en inglés en la traducción de 1816 efectuada por GeorgePeacock del Tratado del cálculo diferencial y del cálculo integral de Sylvestre François Lacroix, mientras queAlexis Clairaut fue el primero que pensó en ampliar las coordenadas polares a tres dimensiones.
Representación de puntos con coordenadas polares
Los puntos (3,60º) y (4,210º) en un sistema decoordenadas polares.
En la figura se representa un sistema de coordenadas polares en elplano, el centro de referencia (punto O) y la línea OL sobre la que semiden los ángulos. Para referenciar un punto se indica la distancia alcentro de coordenadas y el ángulo sobre el eje OL.
• El punto (3, 60º) indica que está a una distancia de 3 unidades desdeO, medidas con un ángulo de 60º sobre OL.
• El punto (4, 210º) indica que está a una distancia de 4 unidadesdesde O y un ángulo de 210º sobre OL.
Un aspecto a considerar en los sistemas de coordenadas polares es queun único punto del plano puede representarse con un número infinitode coordenadas diferentes, lo cual no sucede en el sistema decoordenadas cartesianas. O sea que en el sistema de coordenadaspolares no hay una correspondencia biunívoca entre los puntos del plano y el conjunto de las coordenadas polares.Esto ocurre por dos motivos:
• Un punto, definido por un ángulo y una distancia, es el mismo punto que el indicado por ese mismo ángulo másun número de revoluciones completas y la misma distancia. En general, el punto ( , θ) se puede representarcomo ( , θ ± ×360°) o (− , θ ± (2 + 1)180°), donde es un número entero cualquiera.
• El centro de coordenadas está definido por una distancia nula, independientemente de los ángulos que seespecifiquen. Normalmente se utilizan las coordenadas arbitrarias (0, θ) para representar el polo, ya queindependientemente del valor que tome el ángulo θ, un punto con radio 0 se encuentra siempre en el polo. Estascircunstancias deben tenerse en cuenta para evitar confusiones en este sistema de coordenadas. Para obtener unaúnica representación de un punto, se suele limitar a números no negativos ≥ 0 y θ al intervalo [0, 360°) o(−180°, 180°] (en radianes, [0, 2π) o (−π, π]).
Los ángulos en notación polar se expresan normalmente en grados o en radianes, dependiendo del contexto. Porejemplo, las aplicaciones de navegación marítima utilizan las medidas en grados, mientras que algunas aplicacionesfísicas (especialmente la mecánica rotacional) y la mayor parte del cálculo matemático expresan las medidas enradianes.

Coordenadas polares 8
Conversión de coordenadas
Paso de coordenadas polares a rectangulares y viceversaLas coordenadas rectangulares (x, y) de cualquier punto de un plano implican solamente dos variables, x e y. Portanto, la ecuación de cualquier lugar geométrico en un sistema de coordenadas rectangulares en un plano , contieneuna o ambas de estas variables, pero no otras. Por esto es apropiado llamar a una ecuación de esta clase la ecuaciónrectangular del lugar geométrico.Las coordenadas polares (r , Ѳ) de cualquier punto de un plano implican solamente dos variables, r y Ѳ, de maneraque la ecuación de cualquier lugar geométrico en el plano coordenado polar contiene una o ambas variables, pero nootras. Tal ecuación se llama, de acuerdo con esto , la ecuación polar del lugar geométrico. Así, la ecuación Ѳ = -π/4y r = cos Ѳ son las ecuaciones polares de dos lugares geométricos planos .Para un lugar geométrico determinado , conviene , frecuentemente , saber transformar la ecuación polar en laecuación rectangular, y recíprocamente . Para efectuar tal Y transformación debemos conocer las relaciones queexisten entre las coordenadas rectangulares y las coordenadas polares de cualquier punto ,X,A del lugar geométrico.Se obtienen Y relaciones particularmente simples cuando el polo y el eje polar del sistema polar se hacen coincidir ,respectivamente , con el origen y la parte positiva del eje X del sistema rectangular. Sea P un punto cualquiera quetenga por coordenadas rectangulares (x, y) y por coordenadas polares (r,Ѳ) Entonces se deducen inmediatamente lasrelacionesx = r cos Ѳy = r sen Ѳx²+ y² = r²Ѳ = arc tg y/xr = ± √x²+y²sen Ѳ = ± y/√x²+y²cos Ѳ = ± x/√x²+y²
Diagrama ilustrativo de la relación entre lascoordenadas polares y las coordenadas
cartesianas.
En el plano de ejes xy con centro de coordenadas en el punto O sepuede definir un sistema de coordenadas polares de un punto M delplano, definidas por la distancia r al centro de coordenadas, y el ángulo
del vector de posición sobre el eje x.
Conversión de coordenadas polares a rectangulares
Definido un punto en coordenadas polares por su ángulo sobre el ejex, y su distancia r al centro de coordenadas, se tiene:
Conversión de coordenadas rectangulares a polares
Definido un punto del plano por sus coordenadas rectangulares (x,y),se tiene que la coordenada polar r es:
(aplicando el Teorema de Pitágoras)
Para determinar la coordenada angular θ, se deben distinguir dos casos:• Para = 0, el ángulo θ puede tomar cualquier valor real.

Coordenadas polares 9
• Para ≠ 0, para obtener un único valor de θ, debe limitarse a un intervalo de tamaño 2π. Por convención, losintervalos utilizados son [0, 2π) y (−π, π].
Para obtener θ en el intervalo [0, 2π), se deben usar las siguientes fórmulas ( denota la inversa de la funcióntangente):
Para obtener θ en el intervalo (−π, π], se deben usar las siguientes fórmulas:
o equivalentemente
Muchos lenguajes de programación modernos evitan tener que almacenar el signo del numerador y del denominadorgracias a la implementación de la función atan2, que tiene argumentos separados para el numerador y eldenominador. En los lenguajes que permiten argumentos opcionales, la función atan puede recibir comoparámetro la coordenada x (como ocurre en Lisp).
Ecuaciones polaresSe le llama ecuación polar a la ecuación que define una curva expresada en coordenadas polares. En muchos casosse puede especificar tal ecuación definiendo como una función de θ. La curva resultante consiste en una serie depuntos en la forma ( (θ), θ) y se puede representar como la gráfica de una función .Se pueden deducir diferentes formas de simetría de la ecuación de una función polar . Si (−θ) = (θ) la curvaserá simétrica respecto al eje horizontal (0°/180°), si (180°−θ) = (θ) será simétrica respecto al eje vertical (90°/270°), y si (θ−α°) = (θ) será simétrico rotacionalmente α° en sentido horario respecto al polo.Debido a la naturaleza circular del sistema de coordenadas polar, muchas curvas se pueden describir con una simpleecuación polar, mientras que en su forma cartesiana sería mucho más intrincado. Algunas de las curvas másconocidas son la rosa polar, la espiral de Arquímedes, la lemniscata, el caracol de Pascal y la cardioide.Para los apartados siguientes se entiende que el círculo, la línea y la rosa polar no tienen restricciones en el dominioy rango de la curva.

Coordenadas polares 10
Circunferencia
Un círculo con ecuación (θ) = 1.
La ecuación general para una circunferencia con centro en ( 0, φ) yradio es
En ciertos casos específicos, la ecuación anterior se puede simplificar.Por ejemplo, para una circunferencia con centro en el polo y radio a, seobtiene:
Línea
Las líneas radiales (aquellas que atraviesan el polo) se representanmediante la ecuación
donde φ es el ángulo de elevación de la línea, esto es, φ = arctan donde es la pendiente de la línea en elsistema de coordenadas cartesianas. La línea no radial que cruza la línea radial θ = φ perpendicularmente al punto (
0, φ) tiene la ecuación
Rosa polar
Una rosa polar con ecuación (θ) = 2 sin 4θ.
La rosa polar es una famosa curva matemática que parece una flor conpétalos, y puede expresarse como una ecuación polar simple,
para cualquier constante (incluyendo al 0). Si k es un númeroentero, estas ecuaciones representan una rosa de k pétalos cuando k esimpar, o 2k pétalos si k es par. Si k es racional pero no entero, lagráfica es similar a una rosa pero con los pétalos solapados. Nótese queestas ecuaciones nunca definen una rosa con 2, 6, 10, 14, etc. pétalos.La variable a representa la longitud de los pétalos de la rosa.Si tomamos sólo valores positivos para r y valores en el intervalo
para , la gráfica de la ecuación:
es una rosa de k pétalos, para cualquier número natural . Y si , la gráfica es una circunferencia de radio

Coordenadas polares 11
Espiral de Arquímedes
Un brazo de la espiral de Arquímedes conecuación r(θ) = θ para 0 < θ < 6π.
La espiral de Arquímedes es una famosa espiral descubierta porArquímedes, la cual puede expresarse también como una ecuaciónpolar simple. Se representa con la ecuación
Un cambio en el parámetro a producirá un giro en la espiral, mientrasque b controla la distancia entre los brazos, la cual es constante parauna espiral dada. La espiral de Arquímedes tiene dos brazos, uno paraθ > 0 y otro para θ < 0. Los dos brazos están conectados en el polo. Laimagen especular de un brazo sobre el eje vertical produce el otrobrazo. Esta curva fue una de las primeras curvas, después de lassecciones cónicas, en ser descritas en tratados matemáticos. Además esel principal ejemplo de curva que puede representarse de forma másfácil con una ecuación polar.
Otros ejemplos de espirales son la espiral logarítmica y la espiral de Fermat.
Secciones cónicas
Elipse, indicándose su semilado recto.
Una sección cónica con un foco en el polo y el otro en cualquier puntodel eje horizontal (de modo que el semieje mayor de la cónica descansesobre el eje polar) es dada por:
donde e es la excentricidad y es el semilado recto (la distanciaperpendicular a un foco desde el eje mayor a la curva). Si e > 1, estaecuación define una hipérbola; si e = 1, define una parábola; y si e < 1,define una elipse. Para la elipse, el caso especial e = 0 resulta en un círculo de radio .
Números complejos
Ilustración de un número complejo z en el planocomplejo.
Cada número complejo se puede representar como un punto en el planocomplejo, y se puede expresar, por tanto, como un punto encoordenadas cartesianas o en coordenadas polares. El número complejoz se puede representar en forma rectangular como
donde i es la unidad imaginaria. De forma alternativa, se puede escribiren forma polar (mediante las fórmulas de conversión dadas arriba)como
por lo que se deduce que
donde e es la constante de Neper. Esta expresión es equivalente a lamostrada en la fórmula de Euler. (Nótese que en esta fórmula, al igual que en todas aquellas en las que intervienenexponenciales de ángulos,

Coordenadas polares 12
Ilustración de un número complejo en el planocomplejo usando la fórmula de Euler.
se asume que el ángulo θ está expresado en radianes.) Para pasar de laforma polar a la forma rectangular de un número complejo dado sepueden usar las fórmulas de conversión vistas anteriormente.
Para las operaciones de multiplicación, división y exponenciación denúmeros complejos, es normalmente mucho más simple trabajar connúmeros complejos expresados en forma polar que con su equivalenteen forma rectangular:
•• Multiplicación:
•• División:
• Exponenciación (Fórmula de De Moivre):
Cálculo infinitesimalEl cálculo infinitesimal puede ser aplicado a las ecuaciones expresadas en coordenadas polares. A lo largo de estasección se expresa la coordenada angular θ en radianes, al ser la opción convencional en el análisis matemático.
Cálculo diferencialPartiendo de las ecuaciones de conversión entre coordenadas rectangulares y polares, y tomando derivadas parcialesse obtiene
Para encontrar la pendiente en cartesianas de la recta tangente a una curva polar r(θ) en un punto dado, la curva debeexpresarse primero como un sistema de ecuaciones paramétricas
Diferenciando ambas ecuaciones respecto a θ resultaDividiendo la segunda ecuación por la primera se obtiene la pendiente cartesiana de la recta tangente a la curva en elpunto (r, r(θ)):
Cálculo integral
La región R está delimitada por la curva r(θ) y lassemirrectas θ = a y θ = b.
Sea R una región del plano delimitada por la curva continua r(θ) y lassemirrectas θ = a y θ = b, donde 0 < b − a < 2π. Entonces, el área de Rviene dado por

Coordenadas polares 13
La región R se aproxima por n sectores (aquí, n =5).
Este resultado puede obtenerse de la siguiente manera. En primerlugar, el intervalo [a, b] se divide en n subintervalos, donde n es unentero positivo cualquiera. Por lo tanto Δθ, la longitud de cadasubintervalo, es igual a b − a (la longitud total del intervalo) divididopor n (el número de subintervalos). Para cada subintervalo i = 1, 2, …,n, sea θi su punto medio. Se puede construir un sector circular concentro en el polo, radio r(θi), ángulo central Δθ y longitud de arco
. El área de cada sector es entonces igual a
.
Por lo tanto, el área total de todos los sectores es
Cuanto mayor sea n, mejor es la aproximación al área. En el límite, cuando n → ∞, la suma pasa a ser una suma deRiemann, y por tanto converge en la integral
GeneralizaciónUsando las coordenadas cartesianas, un elemento de área infinitesimal puede ser calculado como dA = dx dy. Elmétodo de integración por sustitución para las integrales múltiples establece que, cuando se utiliza otro sistema decoordenadas, debe tenerse en cuenta la matriz de conversión Jacobiana:Por lo tanto, un elemento de área en coordenadas polares puede escribirse como:
Una función en coordenadas polares puede ser integrada como sigue:
donde R es la región comprendida por una curva r(θ) y las rectas θ = a y θ = b.La fórmula para el área de R mencionada arriba se obtiene tomando f como una función constante igual a 1. Una delas aplicaciones de estas fórmulas es el cálculo de la Integral de Gauss :
Cálculo vectorialEl cálculo vectorial puede aplicarse también a las coordenadas polares. Sea el vector de posición , con r y dependientes del tiempo t.Seaun vector unitario en la dirección de yun vector unitario ortogonal a . Las derivadas primera y segunda del vector de posición son:

Coordenadas polares 14
Extensión a más de dos dimensiones
Tres dimensionesEl sistema de coordenadas polares puede extenderse a tres dimensiones con dos sistemas de coordenadas diferentes:el sistema de coordenadas cilíndricas y el sistema de coordenadas esféricas. El sistema de coordenadas cilíndricasañade una coordenada de distancia, mientras que el sistema de coordenadas esféricas añade una coordenada angular.
Coordenadas cilíndricas
Un punto representado en coordenadascilíndricas.
El sistema de coordenadas cilíndricas es un sistema de coordenadasque extiende al sistema de coordenadas polares añadiendo una terceracoordenada que mide la altura de un punto sobre el plano, de la mismaforma que el sistema de coordenadas cartesianas se extiende a tresdimensiones. La tercera coordenada se suele representar por h,haciendo que la notación de dichas coordenadas sea (r, θ, h).
Las coordenadas cilíndricas pueden convertirse en coordenadascartesianas de la siguiente manera:
Coordenadas esféricas
Un punto representado en coordenadas esféricas.
Las coordenadas polares también pueden extenderse a tres dimensionesusando las coordenadas (ρ, φ, θ), donde ρ es la distancia al origen, φ esel ángulo con respecto al eje z (medido de 0º a 180º), y θ es el ángulocon respecto al eje x (igual que en las coordenadas polares, entre 0º y360º) Este sistema de coordenadas es similar al sistema utilizado paradenotar la altitud y la latitud de un punto en la superficie de la Tierra,donde se sitúa el origen en el centro de la Tierra, la latitud δ es elángulo complementario de φ (es decir, δ = 90° − φ), y la longitud lviene dada por θ − 180°.
Las coordenadas esféricas pueden convertirse en coordenadascartesianas de la siguiente manera:Las coordenadas polares en el espacio tienen especial interés cuandolos ángulos determinan la función, como en el caso de la hélice.

Coordenadas polares 15
n dimensionesEs posible generalizar estas ampliaciones de forma que se obtenga un sistema de representación para 4 o másdimensiones. Por ejemplo, para 4 dimensiones se obtiene
AplicacionesLas coordenadas polares son bidimensionales, por lo que solamente se pueden usar donde las posiciones de lospuntos se sitúen en un plano bidimensional. Son las más adecuadas en cualquier contexto donde el fenómeno aconsiderar esté directamente ligado con la dirección y longitud de un punto central, como en las figuras derevolución, en los movimientos giratorios, en las observaciones estelares, etc. Los ejemplos vistos anteriormentemuestran la facilidad con la que las coordenadas polares definen curvas como la espiral de Arquímedes, cuyaecuación en coordenadas cartesianas sería mucho más intrincada. Además muchos sistemas físicos, tales como losrelacionados con cuerpos que se mueven alrededor de un punto central, o los fenómenos originados desde un puntocentral, son más simples y más intuitivos de modelar usando coordenadas polares. La motivación inicial de laintroducción del sistema polar fue el estudio del movimiento circular y el movimiento orbital.
Posición y navegaciónLas coordenadas polares se usan a menudo en navegación, ya que el destino o la dirección del trayecto pueden venirdados por un ángulo y una distancia al objeto considerado. Las aeronaves, por ejemplo, utilizan un sistema decoordenadas polares ligeramente modificado para la navegación.
ModeladoLos Sistemas son Busterniano simetría radial poseen unas características adecuadas para el sistema de coordenadaspolares, con el punto central actuando como polo. Un primer ejemplo de este uso es la ecuación del flujo de las aguassubterráneas cuando se aplica a pozos radialmente simétricos. De la misma manera, los sistemas influenciados poruna fuerza central son también buenos candidatos para el uso de las coordenadas polares. Algunos ejemplos son lasantenas radioeléctricas, o los campos gravitatorios, que obedecen a la ley de la inversa del cuadrado (véase elproblema de los dos cuerpos).Los sistemas radialmente asimétricos también pueden modelarse con coordenadas polares. Por ejemplo ladirectividad de un micrófono, que caracteriza la sensibilidad del micrófono en función de la dirección del sonidorecibido, puede representarse por curvas polares. La curva de un micrófono cardioide estándar, el más común de losmicrófonos, tiene por ecuación r = 0,5 + 0,5 sen θ.
Campos escalaresUn problema en el análisis matemático de funciones de varias variables es la dificultad para probar la existencia deun límite, ya que pueden obtenerse diferentes resultados según la trayectoria de aproximación al punto. En el origende coordenadas, uno de los puntos que tienen más interés para el análisis (por anular habitualmente funcionesracionales o logarítmicas), este problema puede solventarse aplicando coordenadas polares. En otros puntos esposible realizar un cambio de sistema de referencia y así aplicar el truco.Al sustituir las coordenadas cartesianas x, y, z... por sus correspondientes equivalencias en coordenadas polares, ellímite al aproximarse al origen se reduce a un límite de una única variable, lo que resulta fácil de calcular por ser elseno y el coseno funciones acotadas y r un infinitésimo. Si el resultado no muestra dependencia angular, es posibleaseverar que el límite es indistinto del punto y trayectoria desde el que se ha aproximado.

Coordenadas polares 16
Referencias
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Coordenadas polaresCommons.• FooPlot (herramienta que puede mostrar gráficas de funciones en coordenadas polares) (http:/ / fooplot. com/
index. php?r0=2sin(4*theta)& type0=1)• Herramienta online para la conversión de coordenadas cartesianas en coordenadas polares y a la inversa (http:/ /
www. unitsconversion. com. ar/ esp/ coordenadas/ index. htm)• Gráficas de funciones en coordenadas polares (http:/ / matematicas. ingenieria. googlepages. com/ grafica_polar)
Radio (geometría)
Elementos principales de una circunferencia.
En geometría, el radio de una circunferencia es cualquiersegmento que une el centro a cualquier punto de dichacircunferencia.
La longitud del radio es la mitad de la del diámetro. Todos losradios de una figura geométrica poseen la misma longitud.
El radio de una esfera: cualquier segmento que une el centro conun punto de su superficie esférica.
El radio de un poliedro regular: no es sino el radio de la esferacircunscrita [1]
Se llama radio de un polígono regular al radio de lacircunferencia circunscrita (es el segmento que une su centro concualquier vértice). El radio de la circunferencia inscrita se llamaapotema del polígono.
Radio de curvatura: es la magnitud R, recíproca a la curvatuta Kde una curva en un punto dado M, se denomina radio de curvatura de la curva en este punto de que se trata.[2]
En un sentido más general —en geometría, ingeniería, teoría de grafos y muchos otros contextos—, el radio (porejemplo, de un cilindro, un polígono, un grafo o una parte mecánica) es el segmento que une su centro (o eje) y suspuntos más externos.
La relación entre la longitud del radio y la de la circunferencia (perímetro de un círculo) es .
La relación entre la longitud del radio de un círculo y su área es .
• Radio de torsión. La magnitud que caracteriza la desviación de la curva en el espacio respecto de la curva plana.La magnitud T se llama radio de torsión [3]
• Radio de una vecindad. Si la vecindad es el intervalo abierto (a;b), entonces el radio es [a + b]/2.• Radio vector: es el segmento, en una hipérbola o elipse, que une los focos con un punto de la misma [4]
• Radio de convergencia de una serie. Partiendo de una serie formal, que tiene coeficientes en el conjunto de losnúmeros reales o de los complejos, se define al número real R > 0 tal que la serie converge absolutamente para |z|< R y diverge si |z| > R
• Radio de giro . El radio de giro K de un sólido respecto de un eje de giro e viene a ser la distancia al eje e a laque debería situarse una partícula cuya masa fuera igual a la masa total del sólido para que dicha partícula tuvierael mismo momento de inercia que el cuerpo.

Radio (geometría) 17
Referencias[1][1] Diccionario de matemáticas ISBN 84-8055-355-3[2] Cálculo diferencial e integral de Granville, Smith, Longley (1974) (Uteha) México D. F. p. 183.[3] Elementos de goemetría diferencial de Barrett O'Neill(1976) Limusa-Wiley, S.A. México 1 D.F. p. 73[4] Diccionario de matemáticas de Julián Espinoza de los Monteros (coordinador general) (2001) ISBN 84-8055-355-3
ColatitudEn Coordenadas esféricas, colatitud es el ángulo complementario de la latitud, es decir la diferencia entre 90° y lalatitud.
Uso en astronomíaLa colatitud es muy usada en astronomía porque se refiere a la distancia cenital de los polos celestes.[1] Esto significaque la colatitud de un lugar de observación equivale al arco subtendido entre el cénit de dicho lugar y el PoloCeleste. Es otra forma de dar la altura en el sistema de coordenadas horizontales ya que, en vez de medir el ángulodesde el horizonte, éste se mide desde el Polo Celeste, mediante el ángulo complementario, o colatitud.[2]
Si se suma la declinación de una estrella a la colatitud del observador, obtenemos la latitud máxima de esta estrella(es decir, al ángulo desde el horizonte en su culminación o tránsito por el semimeridiano superior).Las estrellas cuyas declinaciones exceden la colatitud del observador se llaman circumpolares porque nuncadesaparecen bajo el horizonte en esa latitud. Si la declinación de un objeto está más al Sur en la esfera celeste que elvalor de la colatitud, nunca se podrá ver desde ese lugar.
Referencias[1][1] Martín Asín, Fernando. Astronomía. 2ª Edición, Madrid, 1982, ISBN 84-300-7163-6, 423 páginas, pag 33.[2][2] Martín Asín, Fernando. Ref. 1, pag 38.

Acimut 18
Acimut
El azimut es el ángulo formado entre la dirección de referencia (norte) y una líneaentre el observador y un punto de interés previsto en el mismo plano que la
dirección de referencia.
Acimut o azimut es una palabra queproviene del árabe clásico السمت,"assumūt"[1] (la dirección, el cenit), pluralde "samt". El significado de este términotiene algunas particularidades según ladisciplina en la que se use.
Astronomía
En astronomía, el acimut es el ángulo olongitud de arco medido sobre el horizonteceleste que forman el punto cardinal Norte yla proyección vertical del astro sobre elhorizonte del observador situado en algunalatitud. Se mide en grados desde el puntocardinal Norte en el sentido de las agujas delreloj, o sea Norte-Este-Sur-.
Por proyección vertical, entendemos el cortecon el horizonte que tiene el círculo máximoque pasa por el cenit y el astro.
Es una de las dos coordenadas horizontales, siendo la otra la altura. La altura y el acimut son coordenadas quedependen de la posición del observador. Es decir que en un mismo momento, un astro es visto bajo diferentescoordenadas horizontales por diferentes observadores situados en puntos diferentes de la Tierra. Esto significa quedichas coordenadas son locales.
NáuticaEn náutica, el acimut se mide desde el punto cardinal norte en sentido horario de 0° a 360° y se llama acimutverdadero (Azv) o real. El acimut podrá ser magnético, si se mide respecto al norte magnético (Azm) o acimutcompás (Azc) en inglés compass, si se mide desde el punto norte de la brújula. En el caso de las cartas de navegaciónaéreas, en las que se usa el acimut magnético, se le denomina rumbo.
Acimuts medidos desde el norte verdadero

Acimut 19
Desde el Norte
Norte 0° o 360° Sur 180°
Nornoreste 22,5° Sursuroeste 202,5°
Noreste 45° Suroeste 225°
Estenoreste 67,5° Oestesuroeste 247,5°
Este 90° Oeste 270°
Estesureste 112,5° Oestenoroeste 292,5°
Sureste 135° Noroeste 315°
Sursureste 157,5° Nornoroeste 337,5°
ConversionesPara convertir un rumbo a un Acimut es necesario primero conocer la declinación magnética. De esta forma si ladeclinación magnética es al Este, entonces el Acimut va a ser el rumbo más la declinación magnética (Az =Rm+Dm), en cambio, si la declinación magnética es al Oeste entonces el Acimut es igual al rumbo menos ladeclinación magnética (Az = Rm-Dm). Para facilitar las ecuaciones y que se utilice una sola, se usa la ecuacióndonde el Acimut es el rumbo más la declinación magnética teniendo en cuenta la convención de signos donde Este espositivo y Oeste es negativo. Ejemplo: necesito encontrar el acimut en un punto donde el rumbo es de 60° y ladeclinación magnética es de 5° Oeste (-5°). Utilizando la fórmula: Az = Rm+Dm = 60° + (-5°) = 55°
Demoras en naúticaEn un buque en navegación se llama así al ángulo medido "desde el norte", en sentido horario, hasta un objeto (faro,astro, embarcación, etc.) Dado que existe una diferencia entre el norte geográfico y el magnético hay una desviacióna la hora de llevar a una carta naútica las mediciones de las demoras. Puede ser demora verdadera (Dv) o demora deaguja (Da). La demora verdadera es la demora de aguja corregida con la corrección total (Ct). Es la que realmente semarca en la carta naútica. La corrección total (Ct) es la suma de la declinación magnética (dm), diferencia entre losnortes geográfico y magnético, y el desvío de aguja, desvío producido por las masas metálicas y aparatos de unbarco. (Dv=Da+Ct) Si el ángulo se mide desde la proa de la embarcación se denomina "marcación". Si la marcaciónse obtiene por el babor de la embarcación es negativa y si es por el estribor es positiva. Las marcaciones se puedenconvertir en demoras utilizando la fórmula: demora=marcación+rumbo.
InstrumentosLa toma de ángulos horizontales en el vocabulario marinero se suele denominar "marcación". En los buques, las"marcaciones visuales" se toman desde unas plataformas con suspensión cardánica que tienen un aro rotatorio(alidada) llamadas taxímetros. En buques equipados con girocompás, los taxímetros suelen poseer un "repetidor" delgirocompás, lo que permite tomar directamente el "acimut compás", al que debe sumársele el error conocido, si lohubiese.También puede tomarse una "marcación radar" a los ecos identificados. Si el radar está en presentación "relativa", esdecir que su "línea de fe" está indicando la proa, a esa "demora" se le suma el rumbo. Si el radar está en presentación"verdadera", la línea de fe indica el Norte y se toma directamente el acimut.

Acimut 20
CartografíaEn la cartografía, el acimut se mide también desde el punto cardinal norte.Es el ángulo de una dirección contado en el sentido de las agujas del reloj a partir del norte geográfico. El acimut deun punto hacia el este es de 90 grados y hacia el oeste de 270 grados sexagesimales. El término acimut sólo se usacuando se trata del norte geográfico. Cuando se empieza a contar a partir del norte magnético, se suele denominarrumbo o acimut magnético. En la geodesia o la topografía geodésica, el acimut sirve para determinar la orientaciónde un sistema de triangulación.Es frecuente que en la cartografía y, especialmente, la topografía los acimuts se expresen en grados centesimales enlugar de utilizar los grados sexagesimales.
Enlaces externos• Cálculo de elevación y azimut [2] para una antena parabólica.
Referencias[1] Etimología según el DRAE (http:/ / lema. rae. es/ drae/ ?val=azimut)[2] http:/ / finder. tooway-instal. com/ fixe/ pages/ index. html
RadiánEl radián es la unidad de ángulo plano en el Sistema Internacional de Unidades. Representa el ángulo central en unacircunferencia y abarca un arco cuya longitud es igual a la del radio. Su símbolo es rad. Hasta 1995 tuvo la categoríade unidad suplementaria en el Sistema Internacional de Unidades, junto con el estereorradián. A partir de ese año, yhasta el momento presente, ambas unidades figuran en la categoría de unidades derivadas.Esta unidad se utiliza primordialmente en física, cálculo infinitesimal, trigonometría, goniometría, etc.

Radián 21
Definición
El ángulo formado por dos radios de una circunferencia, medido en radianes,es igual a la longitud del arco que delimitan los radios dividida entre el radio;es decir, θ = s/r, donde θ es ángulo, s es la longitud de arco, y r es el radio.Por tanto, el ángulo completo, , que subtiende una circunferenciade radio r, medido en radianes, es:
Utilidad
El radián es una unidad sumamente útil para medir ángulos, puesto quesimplifica los cálculos, ya que los más comunes se expresan mediante sencillos múltiplos o divisores de π.
Análisis dimensionalEl radián es la unidad natural en la medida de los ángulos. Por ejemplo, la función seno de un ángulo x expresado enradianes cumple:
Análogamente los desarrollos Taylor de las funciones seno y coseno son:
•
•
donde x se expresa en radianes.
Equivalencias•• La equivalencia entre grados sexagesimales y radianes es: π rad = 180°• La equivalencia entre grados centesimales y radianes es: π rad = 200g
La tabla muestra la conversión de los ángulos más comunes.
Grados 0° 30° 45° 60° 90° 120° 135° 150° 180° 210° 225° 240° 270° 300° 315° 330° 360°
Radianes 0 π/6 π/4 π/3 π/2 2π/3 3π/4 5π/6 π 7π/6 5π/4 4π/3 3π/2 5π/3 7π/4 11π/6 2π
Otras unidades de medida de ángulos convencionales son el grado sexagesimal, el grado centesimal y, enastronomía, la hora.• El Radián tiene una unidad derivada llamada radián por segundo (rad/s) (velocidad angular). Esta tiene una
equivalencia con las rpm. Las equivalencias se pueden calcular fácilmente con la ecuación que sigue:De rpm a π rad/s
que con la ecuación simplificada:
De π rad/s a rpm
que con la ecuación simplificada:

Radián 22
Conversiones entre grados y radianes
Ángulos de los polígonos más comunes medidos en radianes, expresados comofracciones de π.
Tabla de conversión entre grados sexagesimales y radianes.
Los grados y los radianes son dos diferentessistemas para medir ángulos. Un ángulo de360° equivale a 2π radianes; un ángulo de180° equivale a π radianes (recordemos queel número π ≈ 3,14159265359…).
Las equivalencias de los principales ángulosse muestran en las siguientes figuras:Para convertir grados en radianes oviceversa, partimos de que 180° equivalen aπ radianes; luego planteamos una regla detres y resolvemos.
Ejemplo AConvertir 38° a radianes. radian × 38º 38ºradian /180º = 0.21 radianes.Primero planteamos la regla de tres. Nóteseque la x va arriba, en la posición de losradianes.
Despejamos x, también simplificamos.
Por último obtenemos el equivalentedecimal:x = 0,6632 radianes.
Ejemplo BConvertir 2,4 radianes a grados.Primero planteamos la regla de tres. Nóteseque la x va abajo, en la posición de losgrados.
Despejamos x.
Por último obtenemos el equivalente decimal:x = 137.5099°"

Radián 23
Referencias• Earliest Known Uses of Some of the Words of Mathematics [1].
Bibliografía• Florian Cajori, 1929, History of Mathematical Notations, Vol. 2, pp. 147–148; Nature, 1910, Vol. 83, pp. 156,
217, and 459–460;
Enlaces externos• Conversión de radián en otras unidades [2]
Referencias[1] http:/ / jeff560. tripod. com/ r. html[2] http:/ / unit-converter. org/ es/ angulo/ radian. html
Conjunto abiertoUn conjunto abierto, en topología y otras ramas de las matemáticas, es un conjunto en el que todos y cada uno desus elementos están rodeados por otros elementos que también pertenecen al conjunto; o dicho de una manera másintuitiva, que cualquier elemento del conjunto nunca puede llegar a tocar la frontera del conjunto, pues siempre habrámás elementos entre él y dicho borde. En términos más rigurosos se dice que en cualquier elemento del conjuntopuede centrarse una bola abierta que está totalmente contenida en el conjunto. Se puede generalizar el concepto de‘bola’ como los elementos que están muy cerca de otro en cualquier dirección, rodeándolo, pero para ello esnecesario definir una función distancia que permita evaluar la lejanía o cercanía entre los objetos del conjunto,constituyendo así un espacio métrico —un conjunto más una definición de distancia en él—.
DEFINICIÓN:Sea un espacio métrico. Se dice que es un conjunto abierto si para todo existe una bolaabierta .
Como ejemplo típico se puede evaluar el intervalo abierto (0, 1) en los números reales ( ), que se corresponde contodos los números entre 0 y 1 pero sin incluir estos, es decir, todos los números reales x con 0 < x < 1. Pues bien,intuitivamente se dice que es un conjunto abierto porque, para cualquier número x que pertenezca al conjunto, pormucho que pretendamos acercarnos a la frontera del conjunto —0 y 1—, siempre hay más elementos entre dichonúmero x y la frontera. Por ejemplo, si evaluamos el punto 0.9, entre este y el 1 está el 0,99, por ejemplo; al igualque entre 0,99 y 1 está el 0,999; y así sucesivamente. Siempre hay más números entre cualquier elemento delconjunto y la frintera, y es por tanto ‘abierto’. Sin embargo, en el conjunto cerrado [0, 1] entre el elemento 1 y lafrontera del intervalo —que también es 1— no existen más elementos, por lo que se deduce que es en conjunto‘cerrado’.O valorando la explicación más rigurosa, el espacio métrico en el caso del intervalo (0, 1), denotado como ( , d),es el constituido por:• Los elementos que pertenecen a los números reales ( ), esto es, desde a .• La función distancia que, usando la distancia euclídea (d), se define como el valor absoluto de la resta .De esta manera en todo número x del conjunto (0, 1) puede centrarse una bola que está incluida dentro del conjunto; puesto que en la recta real una bola abierta centrada en un número x se corresponde con otro intervalo de la forma (x - ε, x + ε), donde epsilon es una cantidad muy pequeña, todo lo que se quiera. Así, una bola centrada en 0,9 estará dentro del conjunto, así como en 0,99 o en 0,999999, pues siempre habrá un epsilon de separación entre el punto y la

Conjunto abierto 24
frontera. Por el contrario en el conjunto cerrado [0, 1], una bola centrada en el elemento 1 quedará parcialmente fueradel conjunto.Observe que el que un conjunto dado U sea abierto depende del espacio circundante, el "cuarto de juegos". Porejemplo, el conjunto de los números racionales entre 0 y 1 (exclusivo) es abierto en los números racionales, pero noes abierto en los números reales. Observe también que "abierto" no es el contrario de cerrado. Primero, están losconjuntos que son ambos abiertos y cerrados (llamados conjuntos clopen); en R y otros espacios conexos, solamenteel conjunto vacío y el espacio entero son clopen, mientras que el conjunto de todos los números racionales máspequeños que √2 es clopen en los números racionales. También, hay conjuntos que son ni abiertos ni cerrados, porejemplo (0, 1] en R.
DefinicionesEl concepto de conjunto abierto se puede formalizar con varios grados de generalidad, entre ellos:
GeometríaUn subconjunto U perteneciente al conjunto se llama abierto cuando todos los puntos P de U son interiores.
Espacio euclídeoUn subconjunto U de un espacio euclídeo n-dimensional En se llama abierto si, dado cualquier punto x en U, existeun número real ε > 0 tal que, dado cualquier punto y en En cuya distancia euclidiana de x sea más pequeña que ε, ytambién pertenece a U. De forma equivalente, U es abierto si cada punto en U tiene un entorno contenido en U.Intuitivamente, la ε mide el tamaño de los "meneos permitidos".Un ejemplo de un conjunto abierto en E2 (en un plano) sería todos los puntos dentro de un círculo de radio r, quesatisfacen la ecuación .
Porque la distancia de cualquier punto p en este conjunto al borde del conjunto es mayor que cero:, podemos fijar el ε a la mitad de esta distancia, que significa que el ε es también mayor de
cero, y todos los puntos que están a una distancia ε de p estén también en el conjunto, satisfaciendo así lascondiciones para un conjunto abierto.
Espacios métricosUn subconjunto U de un espacio métrico (M, d) se llama abierto si, dado cualquier punto x en U, existe un númeroreal ε > 0 tales que, dado cualquier punto y en M con d(x, y) < ε, y también pertenece a U. (equivalente, U es abiertosi cada punto en U tiene una vecindad contenida en U)Esto generaliza el ejemplo euclidiano del espacio, puesto que el espacio euclidiano con la distancia euclidiana es unespacio métrico.
Espacios topológicosEn espacios topológicos, el concepto de apertura se toma como fundamental. Uno comienza con un conjuntoarbitrario X y una familia de subconjuntos de X que satisfacen ciertas propiedades que cada noción "razonable" deapertura se supone tener. (específicamente: la unión de conjuntos abiertos es abierta, la intersección finita deconjuntos abiertos es abierta, y en particular el conjunto vacío y X mismo son abiertos.) Tal familia T desubconjuntos se llama una topología en X, y se llama a los miembros de la familia los conjuntos abiertos del espaciotopológico (X, T).Un conjunto se llama cerrado si su complemento en X es abierto.

Conjunto abierto 25
Definición
Sea X un conjunto no vacío y T una familia de subconjuntos de X.T es una topología en X si cumple los siguientesaxiomas.•• X y el conjunto vacío {} están en T.•• La intersección de un número finito de miembros de T está en T.•• La unión de cualquier número de elementos de T está en T.Con estas precisiones, al par (X,T) se denomina espacio topológico y a los miembros de T se los nombra abiertos enel espacio topologico (X,T). Ver el libro Topología de un pool de autores de la Facultad de Ciencias de laUniversidad Complutense.[1]
Esto generaliza la definición métrica del espacio: Si se comienza con un espacio métrico y define conjuntos abiertoscomo antes, entonces la familia de todos los conjuntos abiertos formará una topología en el espacio métrico. Cadaespacio métrico es por lo tanto de una manera natural un espacio topológico. (Hay sin embargo espacios topológicosque no son espacios métricos).
Propiedades•• El conjunto vacío es abierto y cerrado a la vez.•• La unión de cualquier número de conjuntos abiertos es abierta.•• La intersección de un número finito de conjuntos abiertos es abierta.
AplicacionesCada subconjunto A de un espacio topológico X contiene a un (tal vez vacío) conjunto abierto; el más grande de talesconjuntos abiertos se llama el interior de A. Puede ser construido tomando la unión de todos los conjuntos abiertoscontenidos en A.Dados espacios topológicos X y Y, una función f de X a Y es función continua si la preimagen de cada conjuntoabierto en Y es abierto en X. La función f se llama función abierta si la imagen de cada conjunto abierto en X esabierta en Y.Un conjunto abierto en la recta real, según la topología usual, se caracteriza por la propiedad de ser una unióncontable de intervalos abiertos disjuntos.
VariedadesUna variedad se llama abierta si es una variedad sin borde y si no es compacta. Esta noción se diferencia algo de laapertura discutida más arriba.
Referencias[1][1] García Marrero et all: Topología, tomo I; Alhambra, Madrid, ISBN 84-205-0549-8
Bibliografía• Mansfield, M.J.(1974) Indroducción a la Topología, Editorial Alhambra, Madrid.• Chinn,W.G.; Steenrod,N.E. (1975) Primeros conceptyos de Topología), Editorial Alhambra, Madrid.• García Marrero et all.(1975) Topología, Editorial Alhambra, Madrid.

Coordenadas cartesianas 26
Coordenadas cartesianas
Tres ejemplos de coordenadas asignadas a tres puntos diferentes(verde, rojo y azul), sus proyecciones ortogonales sobre los ejes
constituyen sus coordenadas cartesianas y el origen decoordenadas (0,0) en magenta.
Las coordenadas cartesianas o coordenadasrectangulares son un tipo de coordenadas ortogonalesusadas en espacios euclídeos, para la representacióngráfica de una función, en geometría analítica , o delmovimiento o posición en física, caracterizadas porqueusa como referencia ejes ortogonales entre sí que se cortanen un punto origen. Las coordenadas cartesianas sedefinen así como la distancia al origen de las proyeccionesortogonales de un punto dado sobre cada uno de los ejes.La denominación de 'cartesiano' se introdujo en honor deRené Descartes, quien lo utilizó de manera formal porprimera vez.
Si el sistema en si es un sistema bidimensional, sedenomina plano cartesiano. El punto de corte de lasrectas se hace coincidir con el punto cero de las rectas y seconoce como origen del sistema. Al eje horizontal o de lasabscisas se le asigna los números enteros de las equis("x"); y al eje vertical o de las ordenadas se le asignan losnúmeros enteros de las yes ("y"). Al cortarse las dos rectasdividen al plano en cuatro regiones, estas zonas se conocen como cuadrantes:
•• Primer cuadrante "I": Región superior derecha•• Segundo cuadrante "II": Región superior izquierda•• Tercer cuadrante "III": Región inferior izquierda
circunferencia.
•• Cuarto cuadrante "IV": Región inferior derechaEl plano cartesiano se utiliza para asignarle una ubicación a cualquier punto en el plano.En la gráfica se indica el punto +2 en las abscisas y +3 en las ordenadas. El conjunto (2 ,3) se denomina "par ordenado" y del mismo modo se pueden ubicar otros puntos.
Las coordenadas cartesianas se usaron un ejemplo para definir un sistema cartesiano osistema de referencia respecto ya sea a un solo eje (línea recta), respecto a dos ejes (unplano) o respecto a tres ejes (en el espacio), perpendiculares entre sí (plano y espacio),que se cortan en un punto llamado origen de coordenadas. En el plano, las coordenadascartesianas se denominan abscisa y ordenada. La abscisa es la coordenada horizontal y se representa habitualmentepor la letra x, mientras que la ordenada es la coordenada vertical y se representa por la y.

Coordenadas cartesianas 27
Historia
Gráfica de dos hipérbolas y sus asíntotas.
Se denominan coordenadas cartesianas en honor a RenéDescartes (1596-1650), el célebre filósofo y matemático francésque quiso fundamentar su pensamiento filosófico en el método detomar un «punto de partida» evidente sobre el que edificaría todo elconocimiento.
Como creador de la geometría analítica, Descartes tambiéncomenzó tomando un «punto de partida» en esta disciplina, elsistema de referencia cartesiano, para poder representar lageometría plana, que usa sólo dos rectas perpendiculares entre síque se cortan en un punto denominado «origen de coordenadas».
Recta euclídea
Un punto cualquiera de una recta puede asociarse y representarsecon un número real, positivo si está situado a la derecha de unpunto O, y negativo si está a la izquierda. Dicho punto se llama origen de coordenadas O (letra O) y se asocia alvalor 0 (cero).
Corresponde a la dimensión uno, que se representa con el eje X, en el cual se define un origen de coordenadas,simbolizado con la letra O (O de origen) y un vector unitario en la dirección positiva de las x: .
Este sistema de coordenadas es un espacio vectorial de dimensión uno, y se le pueden aplicar todas las operacionescorrespondientes a espacios vectoriales. También se le llama recta real.Un punto:
también puede representarse:
La distancia entre dos puntos A y B es:
Plano euclídeoCon un sistema de referencia conformado por dos rectas perpendiculares que se cortan en el origen, cada punto delplano puede "nombrarse" mediante dos números: (x, y), que son las coordenadas del punto, llamadas abscisa yordenada, respectivamente, que son las distancias ortogonales de dicho punto respecto a los ejes cartesianos.

Coordenadas cartesianas 28
Sistema de coordenadas cartesianas.
La ecuación del eje x es y = 0, y la del eje y es x = 0, rectas que secortan en el origen O, cuyas coordenadas son, obviamente, (0, 0).
Se denomina también eje de las abscisas al eje x, y eje de lasordenadas al eje y. Los ejes dividen el espacio en cuatro cuadrantes enlos que los signos de las coordenadas alternan de positivo a negativo(por ejemplo, las dos coordenadas del punto A serán positivas,mientras que las del punto B serán ambas negativas).
Las coordenadas de un punto cualquiera vendrán dadas por lasproyecciones del segmento entre el origen y el punto sobre cada uno delos ejes.
Sobre cada uno de los ejes se definen vectores unitarios (i y j) como aquellos paralelos a los ejes y de módulo(longitud) la unidad. En forma vectorial, la posición del punto A se define respecto del origen con las componentesdel vector OA.
La posición del punto A será:
Nótese que la lista de coordenadas puede expresar tanto la posición de un punto como las componentes de un vectoren notación matricial.La distancia entre dos puntos cualesquiera vendrá dada por la expresión:
Aplicación del teorema de Pitágoras al triángulo rectángulo ABC.Un vector cualquiera AB se definirá restando, coordenada a coordenada, las del punto de origen de las del punto dedestino:
Evidentemente, el módulo del vector AB será la distancia dAB entre los puntos A y B antes calculada.
Espacio euclídeoSi tenemos un sistema de referencia formado por tres rectas perpendiculares entre sí (X, Y, Z), que se cortan en elorigen (0, 0, 0), cada punto del espacio puede nombrarse mediante tres números: (x, y, z), denominados coordenadasdel punto, que son las distancias ortogonales a los tres planos principales: los que contienen las parejas de ejes YZ,XZ e YX, respectivamente.
coordenadas cartesianas espaciales.
Los planos de referencia XY (z = 0); XZ (y = 0); e YZ (x = 0) dividenel espacio en ocho cuadrantes en los que, como en el caso anterior, lossignos de las coordenadas pueden ser positivos o negativos.La generalización de las relaciones anteriores al caso espacial esinmediata considerando que ahora es necesaria una tercera coordenada(z) para definir la posición del punto.
Las coordenadas del punto A serán:
y el B:

Coordenadas cartesianas 29
La distancia entre los puntos A y B será:
El segmento AB será:
Cambio del sistema de coordenadasTanto en el caso plano como en el caso espacial pueden considerarse tres transformaciones elementales: traslacióndel origen, rotación alrededor de un eje y escalado.
Traslación del origen
Traslación del origen en coordenadas cartesianas.
Suponiendo un sistema de coordenadas inicial S1 con origen en O yejes x e y
y las coordenadas de un punto A dado, sean en el sistema S1:
dado un segundo sistema de referencia S2
Siendo los centros de coordenadas de los sistemas 0 y 0´, puntosdistintos, y los ejes x, x´; e y, y´ paralelos dos a dos, y las coordenadasde O´, respecto a S1:
Se dice traslación del origen, a calcular las coordenadas de A en S2, según los datos anteriores, que llamaremos:
Dados los puntos O, O´ y A, tenemos la suma de vectores:
despejando
Lo que es lo mismo que:
Separando los vectores por coordenadas:
y ampliándolo a tres dimensiones:

Coordenadas cartesianas 30
Rotación alrededor del origen
Rotación alrededor del origen en coordenadascartesianas.
Dado un sistema de coordenadas en el plano S1
con origen en O y ejesx e y:
y una base ortonormal de este sistema:
Un punto A del plano se representará en este sistema según suscoordenadas:
Para un segundo sistema S2
de referencia girado un ángulo ,respecto al primero:
y con una base ortonormal:
Al cálculo de las coordenadas del punto A, respecto a este segundo sistema de referencia, girado respecto al primero,se llama rotación alrededor del origen, siendo su representación:
Hay que tener en cuenta que el punto y son el mismo punto, ; se emplea una denominación u otrapara indicar el sistema de referencia empleado. El valor de las coordenadas respecto a uno u otro sistema, sí sondiferentes, y es lo que se pretende calcular.La representación de B1 en B2 es:
Dado que el punto A en B1 es:
con la transformación anterior tenemos:
Y, deshaciendo los paréntesis:
reordenando:
Como:;
Tenemos que:
Como sabíamos:
Por identificación de términos:

Coordenadas cartesianas 31
Que son las coordenadas de A en B2, en función de las coordenadas de A en B1 y de .
EscaladoSea un punto con coordenadas (x,y) en el plano. Si se cambia la escala de ambos ejes en un factor λ, las coordenadasde dicho punto en el nuevo sistema de coordenadas pasarán a ser:
El factor de escala λ no necesariamente debe ser el mismo para ambos ejes.
Cálculo matricialSiendo [T] la matriz de transformación y cuyas filas son igualmente las componentes de los vectores unitarios i ' yj ' respecto de los originales i y j, o si se prefiere, cuyas columnas son las componentes de los vectores unitariosoriginales en el sistema de referencia rotado.
Nota: Las magnitudes vectoriales están en negrita.
Notas y referencias• «Cartesian Coordinate System [1]» (en inglés). Cut the knot.• Weisstein, Eric W. «Sistema de coordenadas [2]» (en inglés). MathWorld. Wolfram Research.• Weisstein, Eric W. «Coordenadas cartesianas [3]» (en inglés). MathWorld. Wolfram Research.
Enlaces externos• Coordenadas cartesianas [4], explicación interactiva (requiere java)• Proyecto didáctico para introducción al plano cartesiano [5] en lenguaje de programación Logo.
Referencias[1] http:/ / www. cut-the-knot. org/ Curriculum/ Calculus/ Coordinates. shtml[2] http:/ / mathworld. wolfram. com/ CoordinateSystem. html[3] http:/ / mathworld. wolfram. com/ CartesianCoordinates. html[4] http:/ / descartes. cnice. mec. es/ materiales_didacticos/ Coordenadas_cartesianas/ Coordenadas_cartesianas. htm[5] http:/ / neoparaiso. com/ logo/ plano-cartesiano. html

Coordenadas cilíndricas 32
Coordenadas cilíndricasLas coordenadas cilíndricas son un sistema de coordenadas para definir la posición de un punto del espaciomediante un ángulo, una distancia con respecto a un eje y una altura en la dirección del eje.El sistema de coordenadas cilíndricas es muy conveniente en aquellos casos en que se tratan problemas que tienensimetría de tipo cilíndrico o acimutal. Se trata de una versión en tres dimensiones de las coordenadas polares de lageometría analítica plana.Un punto en coordenadas cilíndricas se representa por (ρ,φ, ), donde:• ρ: Coordenada radial, definida como la distancia del punto al eje , o bien la longitud de la proyección del
radiovector sobre el plano • φ: Coordenada acimutal, definida como el ángulo que forma con el eje la proyección del radiovector sobre el
plano .• : Coordenada vertical o altura, definida como la distancia, con signo, desde el punto P al plano .Los rangos de variación de las trescoordenadas son
La coordenada acimutal φ se hacevariar en ocasiones desde -π a +π. Lacoordenada radial es siempre positiva.Si reduciendo el valor de ρ llega aalcanzarse el valor 0, a partir de ahí, ρvuelve a aumentar, pero φ aumenta odisminuye en π radianes.
Relación con otrossistemas de coordenadas

Coordenadas cilíndricas 33
Relación con las coordenadas cartesianas
Coordenadas cilíndricas y ejes cartesianos relacionados.
Teniendo en cuenta la definición del ánguloφ, obtenemos las siguientes relaciones entrelas coordenadas cilíndricas y las cartesianas:
Líneas y superficiescoordenadas
Las líneas coordenadas son aquéllas que seobtienen variando una de las coordenadas ymanteniendo fijas las otras dos. Para lascoordenadas cilíndricas, éstas son:• Líneas coordenadas ρ: Semirrectas
horizontales partiendo del eje .•• Líneas coordenadas φ: Circunferencias
horizontales.• Líneas coordenadas : Rectas
verticales.
Las superficies coordenadas son aquéllas que se obtienen fijado sucesivamente cada una de las coordenadas de unpunto. Para este sistema son:•• Superficies ρ=cte.: Cilindros rectos verticales.•• Superficies φ=cte.: Semiplanos verticales.• Superficies =cte.: Planos horizontales.Las líneas y superficies coordenadas de este sistema son perpendiculares dos a dos en cada punto. Por ello, éste es unsistema ortogonal.

Coordenadas cilíndricas 34
Base coordenadaA partir del sistema de coordenadas cilíndricas se puede definir una base vectorial en cada punto del espacio,mediante los vectores tangentes a las líneas coordenadas. Esta nueva base puede relacionarse con la basefundamental de las coordenadas cartesianas mediante las relaciones
e inversamente
En el cálculo de esta base se obtienen los factores de escala
Disponiendo de la base de coordenadas cilíndricas se obtiene que la expresión del vector de posición en estascoordenadas es
Nótese que no aparece un término . La dependencia en esta coordenada está oculta en los vectores de la base.Efectivamente:
Diferenciales de línea, superficie y volumen
Diferencial de líneaUn desplazamiento infinitesimal, expresado en coordenadas cilíndricas, viene dado por
Diferenciales de superficieLa expresión general de un diferencial de superficie en coordenadas curvilíneas es complicada.Sin embargo, para el caso de que se trate de una superficie coordenada, el resultado es
y expresiones análogas para las otras dos superficies coordenadas.En el caso particular de las coordenadas cilíndricas, los diferenciales de superficie son
• ρ=cte: • φ=cte: • z=cte:

Coordenadas cilíndricas 35
Diferencial de volumenEl volumen de un elemento en coordenadas curvilíneas equivale al producto del jacobiano de la transformación,multiplicado por los tres diferenciales. El jacobiano, a su vez, es igual al producto de los tres factores de escala, porlo que
que para coordenadas cilíndricas da
Operadores diferenciales en coordenadas cilíndricasEl gradiente, la divergencia, el rotacional y el laplaciano poseen expresiones particulares en coordenadas cilíndricas.Éstas son:•• Gradiente
•• Divergencia
•• Rotacional
•• Laplaciano

Factores de escala (coordenadas ortogonales) 36
Factores de escala (coordenadas ortogonales)Los factores de escala o coeficientes métricos de un sistema de coordenadas ortogonales sobre el espacio euclídeoson las funciones que caracterizan el tensor métrico expresado en dichas coordenadas.
IntroducciónLas líneas coordenadas de un sistema de coordenadas en el espacio euclídeo tridimensional son aquellas que seobtienen partiendo de un punto dado, de coordenadas , variando una de ellas y manteniendo fijas lasotras dos. Un sistema de coordenadas se dice ortogonal si las líneas coordenadas son ortogonales en cada punto. Lascoordenadas cartesianas, las cilíndricas y las esféricas, son ejemplos de coordenadas ortogonales.Dado un conjunto de coordenadas sobre el espacio euclídeo cuyas líneas coordenadas se cortan en ángulo recto,puede construirse una base vectorial ortonormal en cada punto, a partir de los vectores tangentes a cada líneacoordenada. En la obtención de estos vectores se definen unas cantidades, denominadas factores de escala, queaparecen frecuentemente en las fórmulas del cálculo vectorial. Tomando los vectores tangentes a cada línea en unpunto, obtenemos tres vectores ortogonales entre sí, pero no necesariamente unitarios:
Para obtener un sistema ortonormal, dividimos cada vector por su módulo
Las cantidades son los denominados factores de escala. Su nombre proviene de que dan la proporción entre loque varía una coordenada y el desplazamiento que produce esta variación. De hecho el tensor métrico gij del espacioeuclídeo expresado en este sistema de coordenadas:
Debe recordarse que el espacio euclídeo, en el que existe una función para medir distancias y longitudes de curvas,tiene la estructura de variedad de Riemann gracias a la existencia de dicho tensor métrico. Gracias a esa relaciónentre los factores de escala y el tensor métrico, estas magnitudes aparecen en multitud de expresiones de cálculovectorial. Así, un "desplazamiento infinitesimal" se escribe:
La 3-forma elemento de volumen, a partir de la cual se construye el llamado "elemento de volumen diferencial"viene dado en coordenadas curvilíneas por:
(left)También aparecen en las expresiones en coordenadas curvilíneas del gradiente, la divergencia y el rotacional.

Factores de escala (coordenadas ortogonales) 37
Coordenadas esféricas y cilíndricasAplicando el cálculo de los factores de escala a las coordenadas cartesianas se obtiene:
En coordenadas cilíndricas:
y en coordenadas esféricas:
GradienteEn cálculo vectorial, el gradiente de un campo escalar es un campo vectorial. El vector gradiente de evaluado en un punto genérico del dominio de , ( ), indica la dirección en la cual el campo varíamás rápidamente y su módulo representa el ritmo de variación de en la dirección de dicho vector gradiente. Elgradiente se representa con el operador diferencial nabla seguido de la función (cuidado de no confundir elgradiente con la divergencia, ésta última se denota con un punto de producto escalar entre el operador nabla y elcampo). También puede representarse mediante , o usando la notación . La generalización delconcepto de gradiente a campos vectoriales es el concepto de matriz Jacobiana.
DefiniciónSi se toma como campo escalar el que se asigna a cada punto del espacio una presión P (campo escalar de 3variables), entonces el vector gradiente en un punto genérico del espacio indicará la dirección en la cual la presióncambiará más rápidamente. Otro ejemplo es el de considerar el mapa de líneas de nivel de una montaña como campoescalar, que asigna a cada pareja de coordenadas latitud/longitud un escalar altitud (campo escalar de 2 variables). Eneste caso el vector gradiente en un punto genérico indicará la dirección de máxima inclinación de la montaña. Nóteseque el vector gradiente será perpendicular a las líneas de contorno (líneas "equiescalares") del mapa. El gradiente sedefine como el campo vectorial cuyas funciones coordenadas son las derivadas parciales del campo escalar, esto es:
Esta definición se basa en que el gradiente permite calcular fácilmente las derivadas direccionales. Definiendo enprimer lugar la derivada direccional según un vector:
Una forma equivalente de definir el gradiente es como el único vector que, multiplicado por el vector unitario, da laderivada direccional del campo escalar:
Con la definición anterior, el gradiente está caracterizado de forma unívoca. El gradiente se expresa alternativamentemediante el uso del operador nabla:

Gradiente 38
Interpretación del gradienteDe forma geométrica el gradiente es un vector que se encuentra normal (perpendicular) a la curva de nivel en elpunto que se está estudiando, llámese (x,y), (x,y,z), (tiempo, temperatura), etcétera. Algunos ejemplos son:• Considere una habitación en la cual la temperatura se define a través de un campo escalar, de tal manera que en
cualquier punto , la temperatura es . Asumiremos que la temperatura no varía con respectoal tiempo. Siendo esto así, para cada punto de la habitación, el gradiente en ese punto nos dará la dirección en lacual la temperatura aumenta más rápido. La magnitud del gradiente nos dirá cuan rápido aumenta la temperaturaen esa dirección.
• Considere una montaña en la cual su altura en el punto (x,y) se define como H(x, y). El gradiente de H en esepunto estará en la dirección para la que hay un mayor grado de inclinación. La magnitud del gradiente nosmostrará cuán empinada se encuentra la pendiente.
PropiedadesEl gradiente verifica que:
• Es ortogonal a las superficies equiescalares, definidas por =cte.• Apunta en la dirección en que la derivada direccional es máxima.•• Su norma es igual a esta derivada direccional máxima.• Se anula en los puntos estacionarios (máximos, mínimos y puntos de silla).•• El campo formado por el gradiente en cada punto es siempre irrotacional, esto es,
Demostración
(1) Sea M el conjunto de puntos que verifican , sea una curva en M,y sea un vector tangente ,
entonces:
de modo que es ortogonal a todo vector tangente (2) La derivada direccional en la dirección de un vector unitario viene dada por:
que es máxima cuando apunta en la dirección de (3) Por lo expuesto en (2)(4) El incremento infinitesimal en una dirección de viene dado por la derivada direccional en esa dirección, y dado queen un punto estacionario tal incremento ha de ser nulo para cualquier dirección el gradiente ha de anularse.(5) La componente k-ésima del rotacional puede calcularse empleando el símbolo de Levi-Civita y si las derivadas cruzadasson iguales se tiene:

Gradiente 39
Expresión en diferentes sistemas de coordenadasA partir de su definición puede hallarse su expresión en diferentes sistemas de coordenadas. En coordenadascartesianas, su expresión es simplemente
En un sistema de coordenadas ortogonales, el gradiente requiere los factores de escala, mediante la expresión
Para coordenadas cilíndricas ( , ) resulta
y para coordenadas esféricas ( , , )
En un sistema de coordenadas curvilíneo general el gradiente tiene la forma:
donde en la expresión anterior se usa el convenio de sumación de Einstein.
Gradiente de un campo vectorialVer también Tensor_deformación#Tensores_finitos_de_deformación
En un espacio euclidiano tridimensional, el concepto de gradiente también puede extenderse al caso de un campovectorial, siendo el gradiente de un tensor que da el diferencial del campo al realizar un desplazamiento:
Fijada una base vectorial, este tensor podrá representarse por una matriz 3x3, que en coordenadas cartesianas estáformada por las tres derivadas parciales de las tres componentes del campo vectorial. El gradiente de deformaciónestará bien definido sólo si el límite anterior existe para todo y es una función continua de dicho vector.Técnicamente el gradiente de deformación no es otra cosa que la aplicación lineal de la que la matriz jacobiana es suexpresión explícita en coordenadas.
EjemploDada la función su vector gradiente es el siguiente:
Aplicaciones
Aproximación lineal de una función
El gradiente de una función definida de Rn → R caracteriza la mejor aproximación lineal de la función en unpunto particular en Rn. Se expresa así:
donde es el gradiente evaluado en

Gradiente 40
Aplicaciones en físicaLa interpretación física del gradiente es la siguiente: mide la rapidez de variación de una magnitud física aldesplazarse una cierta distancia. Un gradiente alto significa que de un punto a otro cercano la magnitud puedepresentar variaciones importantes (aquí se entiende por gradiente alto o grande uno tal que su módulo es grande). Ungradiente de una magnitud pequeño o nulo implica que dicha magnitud apenas varía de un punto a otro.El gradiente de una magnitud física posee innumerables aplicaciones en física, especialmente enelectromagnetismo y mecánica de fluidos. En particular, existen muchos campos vectoriales que puede escribirsecomo el gradiente de un potencial escalar.• Uno de ellos es el campo electrostático, que deriva del potencial eléctrico:
• Todo campo que pueda escribirse como el gradiente de un campo escalar, se denomina potencial, conservativo oirrotacional. Así, una fuerza conservativa deriva de la energía potencial como:
• Los gradientes también aparecen en los procesos de difusión que verifican la ley de Fick o la ley de Fourier parala temperatura. Así, por ejemplo, el flujo de calor en un material es directamente proporcional al gradiente detemperaturas
siendo la conductividad térmica.
Divergencia (matemática)La divergencia de un campo vectorial mide la diferencia entre el flujo saliente y el flujo entrante de un campovectorial sobre la superficie que rodea a un volumen de control, por tanto, si el campo tiene "fuentes" la divergenciaserá positiva y "sumideros" la divergencia será negativa.
La Divergencia de un campo vectorialLa divergencia de un campo vectorial en un punto es un campo escalar, y se define como el flujo del campo vectorialpor unidad de volumen conforme el volumen alrededor del punto tiende a cero:
donde es una superficie cerrada que se reduce a un punto en el límite. El símbolo representa el operadornabla.Esta definición está directamente relacionada con el concepto de flujo del campo. Como en el caso del flujo, si ladivergencia en un punto es positiva, se dice que el campo posee fuentes. Si la divergencia es negativa, se dice quetiene sumideros. El ejemplo más característico lo dan las cargas eléctricas, que dan la divergencia del campoeléctrico, siendo las cargas positivas manantiales y las negativas sumideros del campo eléctrico.
Se llaman fuentes escalares del campo al campo escalar que se obtiene a partir de la divergencia de
La divergencia de un campo vectorial se relaciona con el flujo a través del teorema de Gauss o teorema de ladivergencia.

Divergencia (matemática) 41
Coordenadas cartesianasCuando la definición de divergencia se aplica al caso de un campo expresado en coordenadas cartesianas,
el resultado es sencillo:
Coordenadas ortogonalesSin embargo, para un caso más general de coordenadas ortogonales curvilíneas, como las cilíndricas o las esféricas,la expresión se complica debido a la dependencia de los vectores de la base con la posición. La expresión para unsistema de coordenadas ortogonales es:
Donde los son los factores de escala del sistema de coordenadas, relacionados con la forma del tensor métrico endicho sistema de coordenadas. Esta fórmula general, para el caso de coordenadas cartesianas ( ) se reduce a la expresión anterior.Para coordenadas cilíndricas ( ) resulta:
Para coordenadas esféricas ( ) resulta
Coordenadas generalesEn sistemas de coordenadas generales, no necesariamente ortogonales, la divergencia de un vector puede expresarseen términos de las derivadas parciales respecto a las coordenadas y el determinante del tensor métrico:
Divergencia de un campo tensorialEl concepto de divergencia puede extenderse a un campo tensorial de orden superior. En una variedad de Riemann ladivergencia de un tensor T completamente simétrico
Se define como:
Por ejemplo, en teoría de la relatividad especial la energía de un sistema se representa por un tensor simétrico desegundo orden, cuya divergencia es cero. De hecho el principio de conservación de la energía relativista toma laforma:

Divergencia (matemática) 42
Teorema de la divergenciaEl teorema de la divergencia, frecuentemente llamado teorema de Gauss, relaciona el flujo de un campo vectorial através de una superficie cerrada con la integral de la divergencia de dicho campo en el interior del volumenencerrado por una superficie. Ese resultado lo hace interesante en aplicaciones relacionadas con la electrostáticacomo en la mecánica de fluidos.
El teorema se enuncia así: Sea una función vectorial diferenciable definida sobre un conjunto y seaun conjunto cerrado limitado por una frontera o superficie de contorno (que sea una variedad
diferenciable) y sea el vector normal en cada punto de la superficie, entonces se cumple que:
Enlaces Externos• Video sobre la interpretación física de la divergencia [1]
• Video sobre la divergencia en cilíndricas y esféricas [2]
Referencias[1] http:/ / www. academatica. com/ interpretacion-fisica-de-la-divergencia/[2] http:/ / www. academatica. com/ rotacional-y-divergencia-deduccion-de-las-formulas/
RotacionalEn el cálculo vectorial, el rotacional o rotor es un operador vectorial que muestra la tendencia de un campovectorial a inducir rotación alrededor de un punto.Matemáticamente, esta idea se expresa como el límite de la circulación del campo vectorial, cuando la curva sobre laque se integra se reduce a un punto:
Aquí, es el área de la superficie apoyada en la curva , que se reduce a un punto. El resultado de este límiteno es el rotacional completo (que es un vector), sino solo su componente según la dirección normal a yorientada según la regla de la mano derecha. Para obtener el rotacional completo deberán calcularse tres límites,considerando tres curvas situadas en planos perpendiculares.Aunque el que el rotacional de un campo alrededor de un punto sea distinto de cero no implica que las líneas decampo giren alrededor de ese punto y lo encierren. Por ejemplo, el campo de velocidades de un fluido que circulapor una tubería (conocido como perfil de Poiseuille) posee un rotacional no nulo en todas partes, salvo en el ejecentral, pese a que la corriente fluye en línea recta:
La idea es que si colocamos una rueda de paletas infinitamente pequeña en el interior del campo vectorial, esta ruedagirará, aunque el campo tenga siempre la misma dirección, debido a la diferente magnitud del campo a un lado y aotro de la rueda.

Rotacional 43
Fuente vectorial y escalarAl campo vectorial, , que se obtiene calculando el rotacional de un campo en cada punto,
se conoce como las fuentes vectoriales de (siendo las fuentes escalares las que se obtienen mediante ladivergencia).Un campo cuyo rotacional es nulo en todos los puntos del espacio se denomina irrotacional o se dice que carece defuentes vectoriales. Y si está definido sobre un dominio simplemente conexo entonces dicho campo puedeexpresarse como el gradiente de una función escalar, o dicho de otra forma, el campo deriva de un potencial:
Expresión en coordenadas cartesianasPartiendo de la definición mediante un límite, puede demostrarse que la expresión, en coordenadas cartesianas, delrotacional es
que se puede expresar de forma más concisa con ayuda del operador nabla como un producto vectorial, calculablemediante un determinante:
Debe tenerse muy presente que dicho determinante en realidad no es tal pues los elementos de la segunda fila notienen argumento y por tanto carecen de sentido. Además dicho determinante sólo puede desarrollarse por la primerafila. En definitiva, la notación en forma de determinante sirve para recordar fácilmente la expresión del rotacional.En la notación de Einstein, con el símbolo de Levi-Civita se escribe como:
Expresión en otros sistemas de coordenadasSi se emplean sistemas de coordenadas diferentes del cartesiano, la expresión debe generalizarse, para incluir el quelos vectores de la base dependen de la posición. Para un sistema de coordenadas ortogonales, como las cartesianas,las cilíndricas o las esféricas, la expresión general precisa de los factores de escala:
(donde, en cartesianas, y reobtenemos la expresión anterior. En coordenadas cilíndricasy en coordenadas esféricas ).

Rotacional 44
Expresión mediante formas diferencialesUsando la derivada exterior, el rotacional se escribe simplemente como:
Obsérvese que tomando la derivada exterior de un campo (co)vectorial no da lugar a otro campo vectorial, sino a una2-forma o un campo de bivector, escrito correctamente como .Sin embargo, puesto que los bivectores generalmente se consideran menos intuitivos que los vectores ordinarios, elR³-dual se utiliza comúnmente en lugar de otro: esto es una operación quiral, produciendo un pseudovector queadquiere valores opuestos en conjuntos coordenados izquierdos y derechos.
Propiedades• Todo campo potencial (expresable como el gradiente de un potencial escalar) es irrotacional y viceversa, esto es,
• Todo campo central (radial y dependiente sólo de la distancia al centro) es irrotacional.
En particular, el campo eléctrostático de una carga puntual (y por superposición, cualquier campoelectrostático) es irrotacional.
• El rotacional de un campo vectorial es siempre un campo solenoidal, esto es, su divergencia siempre es nula:
Ejemplos
Un campo vectorial sencilloSea el campo vectorial:
que depende linealmente de x e y, que se muestra a continuación:
Mediante inspección visual, se observa que el campo está girando. Si indicara la dirección de un fluido y se pusiera verticalmente una rueda de palas, de las que se utilizaban en los barcos de vapor, tendería a rotar en el sentido de las

Rotacional 45
agujas del reloj. Utilizando la Regla de la mano derecha el vector rotacional apuntará a la parte negativa del eje zeta(hacia dentro) y no contendrá componentes en el eje x o y.Calculando el rotacional:
Que está en la parte negativa del eje z, como se esperaba. En este caso, el rotacional es constante,independientemente de su posición. La "cantidad" de rotación es el mismo en todo punto del espacio. La siguientefigura muestra el rotacional del campo vectorial en tres dimensiones.

Rotacional 46
Un ejemplo más complejoSupongamos otro campo vectorial un poco más complejo:
Su gráfica es:
No se observa con facilidad que este campo sea rotacional, pero investigando un poco se puede observa que, porejemplo, el campo es mayor en x=4 que en x=3. Al igual que en el caso anterior, si pusiéramos de nuevo una ruedade palas en la zona derecha del gráfico, la «corriente» más fuerte a la derecha haría rotar a la rueda en el sentido delas agujas del reloj, lo cual corresponde a un rotacional en la dirección negativa del eje z. En la parte izquierda delgráfico se observa que la corriente más fuerte esta hacia la izquierda por lo que las palas girarían en el sentidocontrario a las agujas del reloj y el rotacional, en este caso, apuntaría hacia la parte positiva el eje z. Computando elrotacional podemos comprobar las suposiciones realizadas.
Efectivamente, el rotacional apunta a la dirección positiva del eje z para x negativa y a la parte negativa del eje zpara x positivo. Obsérvese que el rotacional ya no es uniforme en todos los puntos:

Rotacional 47
Obsérvese que el rotacional solamente depende de la coordenada x.
Otros ejemplos• En un tornado los vientos están rotando sobre el ojo, y un campo vectorial que muestra las velocidades del viento
tendría un rotacional diferente de cero en el ojo, y posiblemente en otras partes (véase vorticidad).•• En un campo vectorial que describa las velocidades lineales de cada parte individual de un disco que rota, el
rotacional tendrá un valor constante en todas las partes del disco.•• Si una autopista fuera descrita con un campo vectorial, y los carriles tuvieran diversos límites de velocidad, el
rotacional en las fronteras entre los carriles sería diferente de cero.• La ley de Faraday de la inducción y la ley de Ampère-Maxwell, dos de las ecuaciones de Maxwell, se pueden
expresar muy simplemente usando el rotacional. La primera indica que el rotacional de un campo eléctrico esigual a la tasa de variación de la densidad del flujo magnético, con signo opuesto debido a la Ley de Lenz; lasegunda indica que el rotacional de un campo magnético es igual a la suma de la densidad de corrientes y laderivada temporal de la densidad de flujo eléctrico.
Enlaces externos• Video sobre la interpretación física del rotacional [1]
• Video de la deducción rotacional en coordenadas esféricas y cilíndricas [2]
• Calculo del rotacional con Sage Math [2]
Referencias[1] http:/ / www. academatica. com/ interpretacion-fisica-del-rotacional/[2] http:/ / ingen. cajael. com/ es/ content/ calculo-del-rotacional-de-un-campo-vectorial-con-sage

Operador laplaciano 48
Operador laplacianoEn cálculo vectorial, el operador laplaciano o laplaciano es un operador diferencial elíptico de segundo orden,denotado como Δ, relacionado con ciertos problemas de minimización de ciertas magnitudes sobre un ciertodominio. El operador tiene ese nombre en reconocimiento a Pierre-Simon Laplace que estudió soluciones deecuaciones diferenciales en derivadas parciales en las que aparecía dicho operador.Expresado en coordenadas cartesianas es igual a la suma de todas las segundas derivadas parciales no mixtasdependientes de una variable. Corresponde a div (grad φ), de donde el uso del símbolo delta (Δ) o nabla cuadrado (
) para representarlo. Si , son un campo escalar y un campo vectorial respectivamente, el laplaciano deambos puede escribirse en términos del operador nabla como:
Problemas relacionados con el operador laplacianoEn física, el laplaciano aparece en múltiples contextos como la teoría del potencial, la propagación de ondas, laconducción del calor, la distribución de tensiones en un sólido deformable, etc. Pero de todas estas situaciones ocupaun lugar destacado en la electrostática y en la mecánica cuántica. En la electrostática, el operador laplaciano apareceen la ecuación de Laplace y en la ecuación de Poisson. Mientras que en la mecánica cuántica el laplaciano de lafunción de onda de una partícula da la energía cinética de la misma. En matemáticas, las funciones tales que sulaplaciano se anula en un determinado dominio, se llaman funciones armónicas sobre el dominio. Estas funcionestienen una excepcional importancia en la teoría de funciones de variable compleja. Además el operador laplaciano esel ingrediente básico de la teoría de Hodge y los resultados de la cohomología de Rham.
Motivación de la ubicuidad del operador laplacianoUna de las motivaciones por las cuales el Laplaciano aparece en numerosas áreas de la física es que las soluciones dela ecuación en una región U son funciones que minimizan el funcional de energía:
Para ver esto supóngase que es una función, y es una función que se anula sobre lafrontera de U. Entonces,
donde la última igualdad se sigue usando la primera identidad de Green. Este cálculo muestra que si ,entonces el funcional de energía E es estacionario alrededor de f. Recíprocamente, si E es estacionario alrededor de f,entonces por el teorema fundamental del cálculo integral.Otra razón de su ubicuidad es que cuando uno escribe la ecuación de Laplace en forma diferencias finitas se apreciaque el Laplaciano en un punto es la diferencia entre el valor de la función en el punto y el valor de la funciónalrededor. Es decir, cualquier magnitud que puede expresarse como una magnitud flujo que se conserva satisface laecuación de Laplace.

Operador laplaciano 49
Propiedades del operador laplacianoEl laplaciano es lineal:
La siguiente afirmación también es cierta:
Operador laplaciano en diversos sistemas de coordenadas
Coordenadas cartesianasEn coordenadas cartesianas (plano) bidimensionales, el laplaciano de una función f es:
En coordenadas cartesianas tridimensionales:
En coordenadas cartesianas en :
Coordenadas cilíndricas
En coordenadas cilíndricas :
Coordenadas esféricas
En coordenadas esféricas :
Coordenadas curvilíneas ortogonales
En coordenadas ortogonales generales :
Donde son los factores de escala del sistema de coordenadas, que en general serán tres funcionesdependientes de las tres coordenadas curvilíneas.

Operador laplaciano 50
Función armónicaUna función se dice que es armónica en E si:
Ejemplos de funciones armónicas:
• sobre el plano euclídeo.
• El potencial gravitatorio dado por es armónico sobre el espacio
euclídeo tridimensional.• los armónicos esféricos son funciones armónicas sobre un dominio finito o infinito, que aparecen en la resolución
de problemas con simetría esférica.
Generalizaciones del LaplacianoEl Laplaciano puede ser extendido a funciones definidas sobre superficies, o en forma más general, en variedades deRiemann y variedades seudoriemannianas.
Operador de Laplace-BeltramiUna extensión del Laplaciano a funciones reales defindas sobre una variedad es el operador de Laplace-Beltrami(denotado ). Se lo define, en forma similar al Laplaciano, como la divergencia del gradiente, donde el gradienteuna función f definida en una variedad (seudo)riemaniana y la divergencia de un campo vectorial X sobre la mismavienen dados en componentes por:
Donde: , es tensor 2-contravariante asociado al tensor métrico. , es la raíz cuadrada del valor absoluto del
determinante del tensor métrico. El operador de Laplace-Beltrami de una función escalar, se obtiene como ladivergencia y el gradiente definidos como anteriormente es decir:
Operador de Laplace-deRhamEn variedades riemannianas y pseudo-riemannianas existe otra generalización del laplaciano que lo extiende ak-formas, que es la base de la cohomología de Hodge-deRham. Esta extensión llamada operador deLaplace-deRham, y denotado como , se define en términos de la diferencial exterior (d) y la codiferencialexterior (δ) de k-formas o alternativamente en términos de la diferencial exterior y el operador dual de Hodge. Esteoperador de Laplace-deRham se define como:
Donde se ha usado que la codiferencial puede reescribirse en términos de la diferencial exterior y el operador dual deHodge:
Donde n es la dimensión de la variedad (seudo)riemanniana y k es el orden de la k-forma α.

Operador laplaciano 51
Operador laplaciano para funciones no diferenciables
En el laplaciano puede generalizarse a funciones que no sean diferenciables pero que sean integrables sobre uncírculo unidad contenido en cierta región. Así se define el laplaciano generalizado:
Puede demostrarse que para una función definida en un entorno de se tiene que:
Enlaces externos• Weisstein, Eric W. «Laplacian [1]» (en inglés). MathWorld. Wolfram Research.• Calcular operador laplaciano con Sage Math [2]
Referencias[1] http:/ / mathworld. wolfram. com/ Laplacian. html[2] http:/ / ingen. cajael. com/ es/ content/ operador-laplaciano-con-sage
Suma de Riemann
Cuatro de los métodos de suma de Riemann para aproximar el área bajo las curvas.Los métodos derecha e izquierda hacen la aproximación usando, respectivamente,
los puntos finales derechos e izquierdos de cada subintervalo. Los métodosmáximo y mínimo hacen la aproximación usando, respectivamente, los valores
más grandes y más pequeños del punto final de cada subintervalo. Los valores delas sumas convergen a medida que los subintervalos parten desde arriba a la
izquierda hasta abajo a la derecha.
En matemáticas, la suma de Riemann es unmétodo de integración numérica que nossirve para calcular el valor de una integraldefinida, es decir, el área bajo una curva,este método es muy útil cuando no esposible utilizar el Teorema fundamental delcálculo. Estas sumas toman su nombre delmatemático alemán Bernhard Riemann.
La suma de Riemann consiste en trazar unnúmero finito de rectángulos dentro de unárea irregular, calcular el área de cada unode ellos y sumarlos. El problema de estemétodo de integración numérica es que alsumar las áreas se obtiene un margen deerror muy grande.
Definición
Consideremos lo siguiente:
• una función donde D es un subconjunto delos números reales
• I = [a, b] un intervalo cerradocontenido en D.
• Un conjunto finito de puntos {x0, x1, x2, ... xn} tales que a = x0 < x1 < x2 ... < xn = b

Suma de Riemann 52
crean una partición de IP = {[x0, x1), [x1, x2), ... [xn-1, xn]}
Si P es una partición con n elementos de I, entonces la suma de Riemann de f sobre I con la partición P se definecomo
donde xi-1 ≤ yi ≤ xi. La elección de yi en este intervalo es arbitraria.Si yi = xi-1 para todo i, entonces denominamos S como la suma de Riemann por la izquierda.Si yi = xi, entonces denominamos S como la suma de Riemann por la derecha.
Suma TrapezoidalEn este caso, el valor de la función f en un intervalo se aproxima por el promedio de los valores de los extremos aizquierda y derecha. De la manera ya descripta, un simple cálculo usando la fórmula del área
para un trapecio con lados paralelos b1, b2 y altura h produces
El error de esta fórmula será
donde es el valor máximo del valor absoluto de La aproximación obtenida con la suma trapezoidal para una función es igual al promedio de las sumas izquierda yderecha de Riemann.
Método de Suma Trapezoidal de la función en el intervalo [0,2] usando cuatro subdivisiones.
M.C. Alfredo Barbosa Baza

Teorema fundamental del cálculo 53
Teorema fundamental del cálculoEl teorema fundamental del cálculo consiste (intuitivamente) en la afirmación de que la derivación e integraciónde una función son operaciones inversas. Esto significa que toda función continua integrable verifica que la derivadade su integral es igual a ella misma. Este teorema es central en la rama de las matemáticas denominada análisismatemático o cálculo.El teorema es fundamental porque hasta entonces el cálculo aproximado de áreas -integrales- en el que se veníatrabajando desde Arquímedes, era una rama de las matemáticas que se seguía por separado al cálculo diferencial quese venía desarrollando por Isaac Newton, Isaac Barrow y Gottfried Leibniz en el siglo XVIII y dio lugar a conceptoscomo el de las derivadas. Las integrales eran investigadas como formas de estudiar áreas y volúmenes, hasta que enese punto de la historia ambas ramas convergieron, al demostrarse que el estudio del "área bajo una función" estabaíntimamente vinculado al cálculo diferencial, resultando la integración, la operación inversa a la derivación.Una consecuencia directa de este teorema es la regla de Barrow, denominada en ocasiones segundo teoremafundamental del cálculo, y que permite calcular la integral de una función utilizando la integral indefinida de lafunción al ser integrada.
Intuición geométrica
El área rayada en rojo puede ser calculada como h × f(x), o si se conociera la funciónA(X), como A(x+h) − A(x). Estos valores son aproximadamente iguales para valores
pequeños de h.
Supóngase que se tiene una funcióncontinua y = f(x) y que surepresentación gráfica es una curva.Entonces, para cada valor de x tienesentido de manera intuitiva pensar queexiste una función A(x) que representael área bajo la curva entre 0 y x aún sinconocer su expresión.
Supóngase ahora que se quiere calcularel área bajo la curva entre x y x+h. Sepodría hacer hallando el área entre 0 yx+h y luego restando el área entre 0 yx. En resumen, el área de esta especiede "loncha" sería A(x+h) − A(x).
Otra manera de estimar esta mismaárea es multiplicar h por f(x) para hallar el área de un rectángulo que coincide aproximadamente con la "loncha".Nótese que la aproximación al área buscada es más precisa cuanto más pequeño sea el valor de h.
Por lo tanto, se puede decir que A(x+h) − A(x) es aproximadamente igual a f(x) · h, y que la precisión de estaaproximación mejora al disminuir el valor de h. En otras palabras, ƒ(x)·h ≈ A(x+h) − A(x), convirtiéndose estaaproximación en igualdad cuando h tiende a 0 como límite.Dividiendo los dos lados de la ecuación por h se obtiene
Cuando h tiende a 0, se observa que el miembro derecho de la ecuación es sencillamente la derivada A’(x) de lafunción A(x) y que el miembro izquierdo se queda en ƒ(x) al ya no estar h presente.Se muestra entonces de manera informal que ƒ(x) = A’(x), es decir, que la derivada de la función de área A(x) es enrealidad la función ƒ(x). Dicho de otra forma, la función de área A(x) es la antiderivada de la función original.

Teorema fundamental del cálculo 54
Lo que se ha mostrado es que, intuitivamente, calcular la derivada de una función y "hallar el área" bajo su curva sonoperaciones "inversas", es decir el objetivo del teorema fundamental del cálculo integral.
Primer teorema fundamental del cálculo
Dada una función f integrable sobre el intervalo , definimos F sobre por .
Si f es continua en , entonces F es derivable en y F'(c) = f(c).Consecuencia directa del primer teorema fundamental del cálculo infinitesimal es:
Siendo f(t) una función integrable sobre el intervalo [a(x),b(x)] con a(x) y b(x) derivables.
Demostración
Lema
Sea integrable sobre y
Entonces
Demostración del lema
Está claro que para toda partición . Puesto que
, la desigualdad se sigue inmediatamente.
Demostración
Por definición se tiene que .
Sea h>0. Entonces .
Se define y como:
,
Aplicando el 'lema' se observa que
.
Por lo tanto,
Sea . Sean
,.
Aplicando el 'lema' se observa que

Teorema fundamental del cálculo 55
.
Como
,
entonces,
.Puesto que , se tiene que
.
Y como es continua en c se tiene que
,y esto lleva a que
.
Ejemplos
Segundo teorema fundamental del cálculoEl segundo teorema fundamental del cálculo integral (o regla de Newton-Leibniz, o también regla de Barrow,en honor al matemático inglés Isaac Barrow, profesor de Isaac Newton) es una propiedad de las funciones continuasque permite calcular fácilmente el valor de la integral definida a partir de cualquiera de las primitivas de la función.
EnunciadoDada una función f(x) continua en el intervalo [a,b] y sea F(x) cualquier función primitiva de f, es decir F '(x)= f(x). Entonces

Teorema fundamental del cálculo 56
DemostraciónSea
.
Tenemos por el primer teorema fundamental del cálculo que:
.Por lo tanto,
tal que .Observamos que
y de eso se sigue que ; por lo tanto,.
Y en particular si tenemos que:
Ejemplos
Como se puede integrar inmediatamente.
Referencias• APOSTOL, Cálculus (http:/ / books. google. es/ books?id=Z5-JhzoChqIC& lpg=PR3& dq=Apostol, Calculus,
Vol. 1:& hl=es& pg=PR3#v=onepage& q& f=false)• SPIVAK, Cálculo Infinitesimal (http:/ / books. google. es/ books?id=mjdXY8rshREC& lpg=PP1& dq=Spivak&
hl=es& pg=PP1#v=onepage& q=Spivak& f=false)
Enlaces externos• El descubrimiento del cálculo integral (http:/ / www. uam. es/ personal_pdi/ ciencias/ barcelo/ histmatem/ calculo/
calculo. html) – Universidad Autónoma de Madrid• Interpretación gráfica del Teorema Fundamental del Cálculo (http:/ / recursos. pnte. cfnavarra. es/ ~msadaall/
geogebra/ figuras/ d7teorema. html) – Manuel Sada Allo• Weisstein, Eric W. « Teorema fundamental del cálculo (http:/ / mathworld. wolfram. com/
FundamentalTheoremsofCalculus. html)» (en inglés). MathWorld. Wolfram Research.• Demostración Euclidiana del TFC (http:/ / mathdl. maa. org/ convergence/ 1/ ?pa=content& sa=viewDocument&
nodeId=388& bodyId=343) – James Gregory, en Convergence (http:/ / mathdl. maa. org/ convergence/ 1/ ) (eninglés)
• Isaac Barrow's proof of the Fundamental Theorem of Calculus (http:/ / www. maths. uwa. edu. au/ ~schultz/ 3M3/L18Barrow. html) (en inglés)

Partición de un conjunto 57
Partición de un conjunto
Partición del círculo en 6 partes {A1, ... , A6}.
En matemáticas, una partición de un conjunto es una divisióndel mismo en subconjuntos disjuntos no vacíos.
Definición
Una partición de un conjunto es una división del mismo en«trozos» separados y no vacíos. Esta división se representamediante una colección o familia de subconjuntos de dichoconjunto que lo recubren.
Una partición del conjunto A es una familia P desubconjuntos no vacíos de A, disjuntos dos a dos, cuyaunión es A. Es decir, P = {Ai: i ∈ I }, donde se cumple:
• Para cada i ∈ I, Ai ⊆ A y Ai ≠ ∅• Para cada par i ≠ j, Ai ∩ Aj = ∅• ∪i ∈ I Ai = A
El concepto de partición es equivalente al de relación de equivalencia: toda relación de equivalencia sobre unconjunto A define una partición de A, y viceversa. Cada elemento de la partición corresponde a una clase deequivalencia de la relación.
Ejemplos• Dado un conjunto no vacío X arbitrario, la familia P = {X} es una partición de X.• Un conjunto con un sólo elemento {x} tiene como única partición a P = { {x} }.•• El conjunto {1, 2, 3} tiene exactamente 5 particiones:
•• { {1}, {2}, {3} }•• { {1, 2}, {3} }•• { {1, 3}, {2} }•• { {1}, {2, 3} }•• { {1, 2, 3} }
Número de particionesEl número de particiones posibles para un conjunto finito solo depende de su cardinal n, y se llama el número de BellBn. Los primeros números de Bell son B0 = 1, B1 = 1, B2 = 2, B3 = 5, B4 = 15, B5 = 52, B6 = 203, ...
Referencias• Lipschutz, Seymour (1991). Teoría de conjuntos y temas afines. McGraw-Hill. ISBN 968-422-926-7.• Weisstein, Eric. «Bell Number [1]» (en inglés). MathWorld. Consultado el 7-12-2013.
Referencias[1] http:/ / mathworld. wolfram. com/ BellNumber. html

Intervalo (matemática) 58
Intervalo (matemática)Un intervalo (del latín intervallum) es un espacio métrico comprendido entre dos valores. Específicamente, unintervalo real es un subconjunto conexo de la recta real , es decir, una porción de recta entre dos valores dados.
CaracterizaciónEl intervalo real es la parte de que verifica la siguiente propiedad dos puntos:
Si e pertenecen a con , entonces para todo tal que , se tiene que pertenecea
NotaciónExisten dos notaciones principales: en un caso se utilizan corchetes y corchetes invertidos, en el otro corchetes yparéntesis; ambas notaciones están descritas en el estándar internacional ISO 31-11.
Intervalo abierto
No incluye los extremos.
• o bien • Notación conjuntista o en términos de desigualdades:
En la definición de límite de una función real se consideracomo dominio un intervalo abierto.
En la topología usual de la recta ( o ℝ) se usa un intervalo abierto para definir un conjunto abierto en dicha topología.En la topología usual de ℝ, un intervalo abierto es un conjunto abierto. El intervalo abierto <a, b> es igual a suinterior, su frontera es el conjunto {a, b} y su clausura es el intervalo cerrado [a, b][1].
Intervalo cerrado
Sí incluye los extremos.
• Que se indica: • Notación conjuntista o en términos de desigualdades
Incluye únicamente uno de los extremos.
• Con la notación o bien indicamos.En notación conjuntista:
• Y con la notación o bien ,En notación conjuntista:

Intervalo (matemática) 59
Los cuatro tipos de intervalos anteriores se llaman finitos; los expertos asignan como su longitud |b- a|. Son muyútiles en el análisis matemático y en los temas de topología general, para el estudios de diferentes operadores comoclausura, interior, frontera, conexidad, etc. [2].
Intervalo infinitoIncluye un extremos e infinito por la derecha.
• Con la notación indicamos.En notación conjuntista:
Sin incluir el extremo:
• Y con la notación ,
Incluye un extremos e infinito por la izquierda.
• Con la notación indicamos.En notación conjuntista:
Sin incluir el extremo:
• Y con la notación ,En notación conjuntista:
Para todo valor real:
• Y con la notación ,En notación conjuntista:

Intervalo (matemática) 60
Operaciones con intervalosEn notación conjuntista: supongamos el conjunto A:
Esto se lee: A son todos los x reales tales que x es menor que cuatro.Y el conjunto B:
El conjunto B abarca todos los x, reales, mayores que nueve.El conjunto unión de A y B sería:
O también se puede anotar:
La unión de dos o más conjuntos es tomar todos lospuntos pertenecientes a cada conjunto.
El conjunto intersección de A y B no existe:
porque A y B no tienen puntos en común.
Definido el conjunto C:
Es decir, que el conjunto C toma valores entre -3 y 15,siempre siendo x un número real.

Intervalo (matemática) 61
El conjunto intersección de A y C es:
El conjunto intersección es aquel que toma los valores encomún entre todos los conjuntos incluidos.
Entorno simétrico
Un entorno simétrico o entorno de centro a y radio r serepresenta:
• Con la notación indicamos.
Entorno reducido
Un entorno reducido de centro a y radio r se representa:
• Con la notación indicamos.
Un entorno reducido de un punto p es un entorno de p,menos {p}. Por ejemplo, el [[intervalo (−1, 1) = {y : −1 <y < 1} es un entorno de p = 0 en la recta real, entonces elconjunto (−1, 0) ∪ (0, 1) = (−1, 1) − {0} es un entorno reducido de 0.
Nota• Si a > b, los intervalos descritos no poseen elementos y denotan al conjunto vacío.• (a,a), [a,a) y (a,a] denotan también al conjunto vacío.• [a,a] denota al conjunto unitario {a}, también llamado intervalo degenerado.• Estas notaciones también se utilizan en otras áreas de las matemáticas; por ejemplo, la notación , denota
un par ordenado en teoría de conjuntos; las coordenadas de un punto o un vector en geometría analítica y álgebralineal; un número complejo en álgebra.
• Ambas notaciones admiten el símbolo de infinito ( ) para indicar que no hay cota.

Intervalo (matemática) 62
Ejemplos gráficos
Gráfica de una función en un intervalo.
Transformación lineal de intervalos.
Transformación lineal de intervalos.
Línea numérica.

Intervalo (matemática) 63
ClasificaciónSe pueden clasificar los intervalos según sus características topológicas (intervalos abiertos, cerrados, semiabiertos)o según sus características métricas (longitud: nula, finita no nula, infinita).La siguiente tabla resume los 11 casos posibles, con a ≤ b, y x perteneciente al intervalo:
Notación Intervalo Longitud Descripción
Intervalo cerrado de longitud finita.
Intervalo semiabierto (cerrado en a, abierto en b).
Intervalo semiabierto (abierto en a, cerrado en b).
Intervalo abierto.
Intervalo semiabierto.
Intervalo semiabierto.
Intervalo semiabierto.
Intervalo semiabierto.
Intervalo a la vez abierto y cerrado.
Intervalo cerrado de longitud nula (intervalo degenerado).
x no existe Sin longitud. Conjunto vacío.
Propiedades• La intersección de intervalos de es también un intervalo.• La unión de intervalos de no siempre es un intervalo (lo será si la intersección es no vacía).• Las partes conexas de son exactamente los intervalos.• Los intervalos cerrados sobre una recta se denominan «segmento de recta».• La imagen por una función continua de un intervalo de es un intervalo de . Esta es una formulación del
Teorema del valor intermedio.
Aritmética de intervalosSean I = [a, b] y J = [c, d] con a ≤ x ≤ b, y c ≤ y ≤ d.Entonces: a + c ≤ x + y ≤ b + d. Lo que justifica que• I + J = [ a + c , b + d ].• I - J = [ a - d, b - c ].• Si se toman a, b, c y d positivos no nulos, I · J = [ ac, bd ] y I / J = [ a/d, b/c ].

Intervalo (matemática) 64
GeneralizaciónUn intervalo n-dimensional se define como un subconjunto de , que es el producto cartesiano de n intervalos:
, uno en cada eje de coordenadas......
Entorno de centro a y radio ε.
En términos topológicos, en el espaciométrico usual los intervalos son lasbolas abiertas y cerradas. De manera másgeneral, se le llama vecindad o entorno decentro a y radio ε, al conjunto de puntos xcuya distancia a a es menor que ε.
Referencias[1] Ayala y otros: Elementos de la Topología general, Salamanca, España, ISBN 84-7829-006-0[2][2] M. J. Mansfield: "Introducción a la topología" ISBN 84-205-0450-5
• Skornyakov, L.A. (2001), « Interval and segment (http:/ / www. encyclopediaofmath. org/ index.php?title=Interval_and_segment& oldid=14087)», en Hazewinkel, Michiel (en inglés), Encyclopaedia ofMathematics, Springer, ISBN 978-1556080104
• Weisstein, Eric W. « Interval (http:/ / mathworld. wolfram. com/ Interval. html)» (en inglés). MathWorld.Wolfram Research.
Integración de RiemannEn el área de Análisis Matemático, la integral de Riemann, es una forma de abordar el problema de la integración,denotada usualmente de la siguiente forma:
Definición formalSe van a definir cuatro conceptos, el último siendo el que nos interesa: el primero una partición de un intervalo [a,b], el segundo la norma de una partición, el tercero una suma de Riemann y el último que una función acotada seaRiemann integrable en un intervalo [a,b].
Partición de un Intervalo y su NormaSea [a,b] un intervalo cerrado en el conjunto de los números los reales. Entonces una partición de [a,b] es unsubconjunto finito P = {x0 = a, x1,...,xn = b} tal que xi > xi - 1, con i = 1,...,n. La norma de la partición es el intervalomás grande:
Lo que estamos haciendo en pocas palabras es cortar al intervalo en subintervalos disjuntos, cuya unión forma elintervalo original, la norma simplemente es la longitud del intervalo de mayor longitud.

Integración de Riemann 65
Suma de RiemannSea f una función en [a, b] y tomemos una partición del intervalo [a, b], que denotaremos por P = {x0 = a, x1,...,xn =b} entonces llamamos suma de Riemann a una suma de la forma:
, con
De manera intuitiva esta suma representa la suma de áreas de rectángulos con base xk - xk - 1 y altura f(tk).Simbolizamos esta suma como S(P, f), también se utiliza la notación más extensa pero más explícita:
Integrabilidad de RiemannUna función f acotada definida en un intervalo [a, b] se dice que es Riemann integrable en [a, b] si existe un númeroI en los reales tal que, para todo número real positivo ε existe una δ positiva tal que si P es una partición de [a, b]con ||P|| < δ y S(P,f) es cualquier suma de Riemann entonces |S(P, f) - I| < ε.Usualmente para funciones conocidas que sabemos integrables se toma una partición regular del intervalo y setoman los tk como alguno de los puntos extremos de cada intervalo(notar que si no supiéramos que la función esintegrable entonces no podríamos tomar cualquier punto del intervalo arbitrariamente, es decir, no podríamos tomarlos valores extremos, tendríamos que revisar que para cualquier valor tk que tomáramos en cada intervalo [xk - 1, xk]la suma de Riemann menos algún número real I es menor en valor absoluto que cualquier ε que hubiéramos tomado,en caso de cumplirse habríamos demostrado que la función f es integrable según Riemann en [a, b] y habríamoshallado su valor; en caso de no cumplirse no habríamos probado nada en absoluto), cuando llevamos al límite estapartición, se puede demostrar que obtenemos el valor de la integral:
Esta última expresión es sobre todo útil para funciones que sabemos que son integrables como por ejemplo lascontinuas. Podemos demostrar que toda función que es continua en un intervalo [a, b], es integrable, en cuyo caso loúnico que restaría sería encontrar el valor de la integral. Por supuesto, si ya estamos familiarizados con el SegundoTeorema Fundamental del Cálculo entonces basta hallar una función F(x) (denominada "una primitiva" de f(x)) cuyaderivada nos dé nuestra función original f(x) y entonces el valor de la integral es F(b)-F(a). No siempre podemoshallar una función primitiva de la que estamos integrando, en esos casos se recurre a una expresión como la anterioro a métodos de aproximación.
Condición necesaria y suficiente para la integrabilidad de Riemann
En este apartado nos referiremos a funciones acotadas en un intervalo cerrado [a,b] (igual que en los apartadosanteriores).Una función no ha de ser continua para ser integrable de Riemann (no obstante esta es una condición suficiente); dehecho una función continua en todo el intervalo salvo en un punto es integrable de Riemann, incluso una función conun número numerable de discontinuidades es integrable y en el caso extremo ciertas funciones con un número nonumerable de discontinuidades pueden ser integrables. El siguiente teorema establece que una función es integrablesi y solo si su conjunto de discontinuidades se puede recubrir por conjuntos abiertos tales que la suma de susanchuras puede hacerse arbitrariamente pequeña.
Criterio de Lebesgue para la integrabilidad de Riemann
Sea f una función definida y acotada en [a,b] y sea D el conjunto de las discontinuidades de f en [a,b].Entonces f (con el conjunto de las funciones Riemann integrables) en [a,b] si, y solo si, D tienemedida cero

Integración de Riemann 66
De este modo, cualquier función continua o con un conjunto numerable de discontinuidades es integrable.Como ejemplo de función con un conjunto no numerable de discontinuidades e integrable tenemos por ejemplo:
siendo C el conjunto de Cantor.
Definiciones equivalentesExisten definiciones que son equivalentes a la definición de integral de Riemann. Son equivalentes en el sentido deque podemos demostrar que una función es integrable respecto a una cierta definición si y sólo si es integrable conrespecto a otra definición. Una muy utilizada es la integral de Darboux que se auxilia de los supremos e ínfimos delos intervalos en los cuales se particiona. Una segunda, que es la que de hecho se utiliza para definir la integral deRiemann-Stieltjes, con los ajustes necesarios (y no la definición que se encuentra arriba, porque cuando se extiende aser de Riemann-Stieltjes no cumple con todo lo que nos gustaría que se pudiera derivar de dicha definición) es lasiguiente:Una función f acotada definida en un intervalo [a, b] se dice que es Riemann integrable en [a, b] si existe un númeroI tal que, para todo número real positivo ε existe una partición Pε de [a, b] tal que si P es un refinamiento de Pε (esdecir P contiene a Pε) y S(P,f) es cualquier suma de Riemann entonces |S(P, f) - I| < ε.De manera intuitiva, la diferencia entre la definición de la integral de Riemann y esta última definición, es que laprimera hace uso del concepto de la norma de la partición menor que un cierto delta para obtener mejoresaproximaciones, en la segunda por contraste nos olvidamos de la norma de la partición y en vez de eso ampliamoslas particiones, es decir les añadimos puntos, para obtener mejores aproximaciones. Esta diferencia es muyimportante para el concepto de la integral de Riemann-Stieltjes, porque en la segunda definición nosotros podemosdecir específicamente qué puntos queremos incluir en la partición, en contraste a la primera, en la que estamosatados a una cierta norma, que aunque se cumpla que la norma sea menor que un cierto delta, puede ser que lapartición no incluya puntos que queremos que incluya en específico (que en el caso de la integral de Riemann no nosimporta, pero cuando utilizamos la integral de Riemann-Stieltjes, hay puntos que son críticos para que se cumplanciertas propiedades).
Notación y Otras Integrales
El símbolo es una "S" deformada. En el caso en que la función f tenga varias variables, el dx especifica la
variable de integración.Si la variable de integración y el intervalo de integración son conocidos, la notación se puede simplificar como
.Algunas funciones no son Riemann integrables tal es el caso de la función de Dirichlet. La integral de Darboux, laintegral de Lebesgue, la integral de Riemann-Stieltjes y otras más que se pueden ver en artículo sobre integraciónson otras formas de atacar el problema de la integración, logrando en algunos casos que funciones que no sonRiemann integrables sean por ejemplo Lebesgue integrables.Históricamente, Riemann concibió esta teoría de integración, y proporcionó algunas ideas para el teoremafundamental del cálculo diferencial e integral. La teoría de la integración de Lebesgue llegó mucho más tarde,cuando los puntos débiles de la integral de Riemann se comprendían mejor.

Integración de Riemann 67
Interpretación GeométricaEn Análisis real, la integral de Riemann es una forma simple de definir la integral de una función sobre un intervalocomo el área bajo la curva de la función.Sea f una función con valores reales definida sobre el intervalo [a, b], tal que para todo x, f(x)≥0 (es decir, tal que f espositiva).Sea Sf={(x, y)|0≤y≤f(x)} la región del plano delimitada por la curva correspondiente a la función f, el eje de lasabscisas y las rectas verticales de ecuaciones x=a y x=b. Estamos interesados en medir el área del dominio S, si esque se puede medir.Para obtener una aproximación al áreaencerrada debajo de una curva, se lapuede dividir en rectángulos comoindica la figura.
El área de cada rectángulo, es elproducto de la función en un punto,por el ancho del intervalo.Al aumentar el número de rectángulosse obtiene una mejor aproximación.

Integración de Riemann 68
. .
Enlaces externos• Integral de Riemann (Departamento de Matemática Aplicada. Facultad de Informática de la Universidad
Politécnica de Madrid) [1]
• Integral definida (Manuel Sada Allo): Ejemplo 1 [2] Ejemplo 2 [3]
Referencias• APOSTOL, Tom M. Análisis Matemático (Mathematical Analysis), trad., ed. Reverté S. A. 1976.• APOSTOL, Tom M. Cálculus Volumen 1 y 2(Calculus), trad., ed. Reverté S.A. 1984.• BARTLE, Robert G. Introducción al Análisis Matemático (The Elements of Real Analysis), trad., ed. Limusa S.A.
1982.• BARTLE et al. Introducción al Análisis Matemático de una Variable (Introduction to Real Analysis), trad., ed.
Limusa S.A. 2009.• KURTZ et al.Theories of Integration The Integrals of Riemann, Lebesgue, Henstock-Kurzweil and McShane, ed.
World Scientific Publishing Co. Pte. Ltd. 2004.• SPIVAK, Michael. Cálculo Infinitesimal(Calculus), trad., ed. Reverté S.A. 1992.
Referencias[1] http:/ / www. dma. fi. upm. es/ docencia/ primerciclo/ calculo/ tutoriales/ integracion/ home. html[2] http:/ / recursos. pnte. cfnavarra. es/ ~msadaall/ geogebra/ figuras/ d11riemann. html[3] http:/ / recursos. pnte. cfnavarra. es/ ~msadaall/ geogebra/ figuras/ d13riemann2. html

Fuentes y contribuyentes del artículo 69
Fuentes y contribuyentes del artículoCoordenadas esféricas Fuente: https://es.wikipedia.org/w/index.php?oldid=71118279 Contribuyentes: 4lex, Barcex, Cobalttempest, Dark, Davius, DerKrieger, Ecemaml, Fergon, GermanX,Gonfer, HUB, Helmy oved, Ingenioso Hidalgo, JacobRodrigues, Jjmontero9, Linkedark, Mdiagom, Pino, Rafa3040, Ricardogpn, Rrmsjp, Secal, Tano4595, 100 ediciones anónimas
Coordenadas polares Fuente: https://es.wikipedia.org/w/index.php?oldid=70881477 Contribuyentes: Acratta, Andrew diaz, Antón Francho, AstroNomo, Banfield, Belgrano, BlackBeast,Blacks601, Byj2000, Cristianrock2, Daniel De Leon Martinez, Danielba894, Diegusjaimes, Edilduranp, Efepe, Ethereal alien, FAR, Fsd141, Gato ocioso, GermanX, Gusbelluwiki, Hichokei,Humberto, Integral triple, JABO, Javier Carro, Jerowiki, Jjafjjaf, Jkbw, Kernel83, Khiari, Leonpolanco, Linkedark, Lokans, MadriCR, Magister Mathematicae, Makete, Miguel.baillon, Mister,Muro de Aguas, Netito777, Papas338, Qwertymith, Rsg, Sabbut, Sergio Alvaré, Tano4595, Taty2007, Tirithel, Ulises.guevaraa1, Wikiseldon, 137 ediciones anónimas
Radio (geometría) Fuente: https://es.wikipedia.org/w/index.php?oldid=72293432 Contribuyentes: 2rombos, 4lex, AVIADOR, Andreasmperu, Baiji, Bernard, BuenaGente, Centroamericano,Chewie, DJ Nietzsche, Diegusjaimes, DylanCooper1313, Edmenb, Eduardosalg, FAL56, Gafotas, GermanX, Ginés90, Gsrdzl, Halfdrag, Harpagornis, Igna, Ivanpares, JMCC1, JacobRodrigues,Jcaraballo, Jkbw, JohnHenrii, Leonpolanco, LosLuna, MadriCR, Magister Mathematicae, Marianov, Mel 23, Ortisa, Poc-oban, Raulshc, Ricardogpn, Rondador, Rrmsjp, SuperBraulio13,Technopat, Vitamine, Waka Waka, Zalovitch, Zyder, 111 ediciones anónimas
Colatitud Fuente: https://es.wikipedia.org/w/index.php?oldid=65016786 Contribuyentes: Agestevez, Metronomo
Acimut Fuente: https://es.wikipedia.org/w/index.php?oldid=71315611 Contribuyentes: Altair Lemos, AngelRB, Antonio V. G., Arpotrek, Ascánder, AstroNomo, Audih, Brunorin, Carmin,CesarWoopi, Claudio Elias, Deachp, Diamondland, Diegusjaimes, Dorieo, Emijrp, Feandir, GermanX, HardBlade, JMPerez, Jesebi, Joseaperez, Jsanchezes, Kazzz, Lautraro, LeCire, Matdrodes,Nicoguaro, Pacoriesco, Pompilos, Rosarino, Rufflos, Salvador Cassis, Tano4595, Teby44, Technopat, Tico, Tirithel, Tortillovsky, Xgarciaf, Yix, 79 ediciones anónimas
Radián Fuente: https://es.wikipedia.org/w/index.php?oldid=70872318 Contribuyentes: .José, Acratta, Algarabia, Andreasmperu, Angel GN, Antur, Açipni-Lovrij, Balderai, Belb, BlackBeast,Charly genio, Chuffo, DJ Nietzsche, Daniel lopez avellaneda, Davius, Davm92, Diegusjaimes, EL Willy, Edslov, Emmanuele, Ener6, Fcr, Fitoschido, Gaijin, Greek, Gsrdzl, Götz, Halfdrag,Helmy oved, HiTe, Hugue, Humberto, Ialad, Igna, Indu, Interwiki, JMCC1, Jarisleif, Jkbw, JorgeGG, Jsanchezes, Juan Mayordomo, Jvgotopo, Kordas, Kved, Linkyn2, Loqu, Lucien leGrey,MadriCR, Magab992, Manuel Trujillo Berges, Manuelt15, Manwë, Marb, Marianov, Markaif, Matdrodes, Mdiagom, Metalpotato, Moriel, Mov0021, Muro de Aguas, Nicanor5, Ninrouter, Ortisa,PACO, PePeEfe, Pello, Pólux, Randerwirth, Raulshc, Rimac, Sauron, Tano4595, Taragui, TeleMania, Tirithel, Trujaman, UA31, Vitamine, Xgarciaf, YoaR, Youssefsan, Zampopo, Zupez zeta,262 ediciones anónimas
Conjunto abierto Fuente: https://es.wikipedia.org/w/index.php?oldid=72174755 Contribuyentes: Acratta, Albertojuanse, Booksboy, Davius, DefLog, Egaida, Fenicio, Humberto, JMCC1, JuanMarquez, Lauranrg, Mister, Sittsam, Snow white dntwry, Tarkus, Teytor, 21 ediciones anónimas
Coordenadas cartesianas Fuente: https://es.wikipedia.org/w/index.php?oldid=72195454 Contribuyentes: .José, 3lbrother, Acratta, Adolfo.poto, Alanfeynman, Albertojuanse, AldoEZ,Algarabia, Alhen, Angel GN, AstroNomo, Açipni-Lovrij, Bachi 2805, Baiji, Balles2601, BlackBeast, Byj2000, Camilo, Cobalttempest, Correogsk, Crescent.Moon, Davius, Diegusjaimes, Dnu72,Documentoweb, Ed547, Farisori, Fassbinder69, Frank--civeta, Fsd141, Ganímedes, GermanX, Ggenellina, Gonzalo2001, Gsrdzl, Götz, Hahc21, HiTe, Hispa, Hprmedina, Humberto, Ialad,Ivansiiito, J. A. Gélvez, JA Galán Baho, JABO, JMCC1, Jaluj, Jamascaro, Javierito92, Javierrami, Jerowiki, Jjvaca, Jkbw, Jorge c2010, José Biedma López, Khiari, Kmelguis, Kved, Lasai,Lauranrg, Leonpolanco, Lostbishop, Lucien leGrey, Magister Mathematicae, MarcoAurelio, Marianov, Matdrodes, Maximilianola, Mircalla22, Montgomery, Moriel, NachoGD, Nioger, Nixón,Niñapediatra, Numbo3, Ortisa, Oxilium, Pacovp, Pati, Petruss, Pólux, Ricardogpn, Robalgri, Rosarinagazo, Savh, Soulreaper, SpeedyGonzalez, SuperBraulio13, Tano4595, Technopat, Tomatejc,UA31, Victorlj92, Yodigo, 314 ediciones anónimas
Coordenadas cilíndricas Fuente: https://es.wikipedia.org/w/index.php?oldid=67332608 Contribuyentes: Agualin, Alejandroscf, Açipni-Lovrij, Dodo, Ecemaml, Ejmeza, Gabriel Vidal Álvarez,Galandil, GermanX, Gonfer, Humbefa, Ingenioso Hidalgo, JMCC1, Jorge c2010, Maldoror, Mdiagom, Meithan, Moriel, Nahuel.freitas, Pilaf, Porao, Rsg, Sabbut, Secal, Tano4595, TeleMania,Template namespace initialisation script, Wricardoh, 48 ediciones anónimas
Factores de escala (coordenadas ortogonales) Fuente: https://es.wikipedia.org/w/index.php?oldid=70431114 Contribuyentes: DFTDER, Davius, Farisori, GermanX, Gusbelluwiki, Hidoykukyo, Ingenioso Hidalgo, Jerowiki, Linkedark, Matdrodes, Sofi mua, Tmwsbg, Waka Waka, 18 ediciones anónimas
Gradiente Fuente: https://es.wikipedia.org/w/index.php?oldid=71309286 Contribuyentes: Abrahaman, Acratta, Adelpine, Af3, Alpha Floor, Antionio, Baytazz, Camima, Daniel De LeonMartinez, Davius, Diegusjaimes, Dodo, EduLeo, Eseotres, Fseoane, Gonfer, Gusbelluwiki, Götz, HUB, Harley orjuela, Hprmedina, Humbefa, J.R.Menzinger, Jekter, Jkbw, Lauranrg, Maldoror,Mdiagom, Netito777, Pati, Pino, Pólux, Rdaneel, Signifer, SpeedyGonzalez, Superzerocool, Tano4595, Tirithel, Torbellino, 98 ediciones anónimas
Divergencia (matemática) Fuente: https://es.wikipedia.org/w/index.php?oldid=72318637 Contribuyentes: Aeveraal, Arjuno3, Chzelada, Danielmh28, Davius, Diegusjaimes, Dusan, Dyon,Fibonacci, Gafotas, Ggenellina, IvanStepaniuk, Jamrb, Jtico, Levuj, Linkedark, Matdrodes, Redbridge, Tano4595, Technopat, 28 ediciones anónimas
Rotacional Fuente: https://es.wikipedia.org/w/index.php?oldid=72042304 Contribuyentes: Alpha Floor, Charlitos, Chzelada, DFTDER, Davius, DefLog, Gonfer, Guti che, Jamrb, Jekter, Jkbw,JuanManwell, Marsal20, Metronomo, Oblongo, Pino, 44 ediciones anónimas
Operador laplaciano Fuente: https://es.wikipedia.org/w/index.php?oldid=71451782 Contribuyentes: Alefisico, AlejandroCamara, Alhen, Carlos Molina Fisico, Charlitos, Cibi3d, Davius,GermanX, Josemiguel84, Juan Mayordomo, Nagul, Pandora89, Parodrilo, Petruss, Pino, Rdaneel, Ricardogpn, TIMINeutron, Trani182, Uruk, 31 ediciones anónimas
Suma de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=72345165 Contribuyentes: Adrianlara92, BlackBeast, CentroBabbage, Efepe, Egaida, Espilas, Gamm340, GermanX,Halfdrag, Hiperfelix, Javierito92, Jerowiki, Jkbw, Joskey, LMLM, Mega-buses, NicolasAlejandro, Pablo Darko, PabloCastellano, 43 ediciones anónimas
Teorema fundamental del cálculo Fuente: https://es.wikipedia.org/w/index.php?oldid=71955794 Contribuyentes: 19jp87, Af3, Akma72, AlfonsoERomero, Alfredobi, Alpha Floor, Amizzau,Argoroth, Arielmusico, Axvolution, Bucephala, Camilo, Cinabrium, Damian cf, Diegusjaimes, Farisori, Faustito, Figempa 2a, Gafotas, Gengiskanhg, GermanX, Götz, HGuillen, Hanjin, Igna,Ilarrosa, JacobRodrigues, Jerowiki, Jkbw, JorgeGG, Juan Mayordomo, Kn, Leandroccl3, Log2x, Luis javier sierra zaleta, Magister Mathematicae, Maldoror, Maleiva, Mandos, Marianov,Matdrodes, Mdiagom, Miguej, Moriel, Netito777, Pino, Pyr0, Pólux, Queninosta, R, RGLago, Rafa3040, Ruberyuka, Tano4595, Tirithel, Varano, Victorlj92, Vitamine, Wricardoh, Xgarciaf,Yeza, Yrithinnd, 257 ediciones anónimas
Partición de un conjunto Fuente: https://es.wikipedia.org/w/index.php?oldid=71253768 Contribuyentes: Acratta, Domaniom, Elwikipedista, Euclides, Farisori, Gato ocioso, HUB, IngeniosoHidalgo, Kismalac, Orly01, Rcrescen, 9 ediciones anónimas
Intervalo (matemática) Fuente: https://es.wikipedia.org/w/index.php?oldid=72101495 Contribuyentes: -jem-, 4lex, Aalcocer, Acratta, Andreasmperu, Angel GN, Antonorsi, Argentinoo, Belb,BlackBeast, Cansado, Cobalttempest, Crixo8, Davius, Diegusjaimes, Dinomal, Dnu72, Dodo, Durero, Edc.Edc, Edmenb, Edslov, Egaida, Error de inicio de sesión, Fibonacci, Gafotas, Götz,Helmy oved, Hprmedina, Ingenioso Hidalgo, Interwiki, JacobRodrigues, Jerowiki, Jimmy45s, Jjafjjaf, Jkbw, JorgeGG, Joseaperez, Juan Marquez, Juan Mayordomo, Julian Mendez, Knopfkind,Leonpolanco, LlamaAl, Llsalcedo, Marianov, Markoszarrate, Matdrodes, Mister, Moriel, Netito777, Nicop, Nixón, PabloCastellano, Raulshc, Ricardogpn, Romero Schmidtke, Rsg, Rubpe19,Sabbut, Sandrostone, Sauron, Savh, Tano4595, Technopat, The Anonymouse, Tirithel, Waka Waka, Weitz, Wilfredor, 214 ediciones anónimas
Integración de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=72281333 Contribuyentes: Acratta, Alhen, Apartidista, Davius, Dianai, DiegoEPaez, Diegusjaimes, Eseotres, Euty,Fsd141, Gato ocioso, Humbefa, Jcaraballo, Jerowiki, Jkbw, Juan Mayordomo, Leonpolanco, Maldoror, Marianov, Matiasasb, Moriel, Netito777, Oscar ., P.o.l.o., Pino, Ramjar, Sabbut,Snakefang, Tano4595, Tarkus, Template namespace initialisation script, Vantonio1985, Varano, Varislav, Vinoblanco, ZygnuX, 51 ediciones anónimas

Fuentes de imagen, Licencias y contribuyentes 70
Fuentes de imagen, Licencias y contribuyentesArchivo:Spherical coordinate elements.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Spherical_coordinate_elements.svg Licencia: Creative CommonsAttribution-ShareAlike 3.0 Unported Contribuyentes: Lyudmil Antonov LantonovArchivo:Coordenadas esféricas figura.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Coordenadas_esféricas_figura.svg Licencia: Creative Commons Attribution-ShareAlike3.0 Unported Contribuyentes: Derivative work: Josemontero9 Coordenadas_eséricas_figura.png by Romero SchmidtkeArchivo:Spherical with grid.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Spherical_with_grid.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes:AndeggsArchivo:Lineas_coordenadas_esfericas.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Lineas_coordenadas_esfericas.png Licencia: GNU Free Documentation License Contribuyentes: Original uploader was Gonfer at es.wikipediaArchivo:Coordenadas polares.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Coordenadas_polares.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes:Drini (Pedro Sánchez)Archivo:Polar graph paper.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Polar_graph_paper.svg Licencia: GNU Free Documentation License Contribuyentes: UserMets501 on en.wikipediaArchivo:CircularCoordinates.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:CircularCoordinates.png Licencia: GNU Free Documentation License Contribuyentes: Maksim,Pbroks13Archivo:Polar to cartesian.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Polar_to_cartesian.svg Licencia: GNU Free Documentation License Contribuyentes: Ben pcc,Mets501, Tano4595, 3 ediciones anónimasArchivo:circle r=1.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Circle_r=1.svg Licencia: GNU Free Documentation License Contribuyentes: derivative work: Pbroks13(talk) Circle_r=1.PNG: User Mets501 on en.wikipediaArchivo:Rose 2sin(4theta).svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Rose_2sin(4theta).svg Licencia: GNU Free Documentation License Contribuyentes: derivativework: Pbroks13 (talk) Rose_r=2sin(4theta).PNG: User Mets501 on en.wikipediaArchivo:Archimedian spiral.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Archimedian_spiral.svg Licencia: GNU Free Documentation License Contribuyentes: derivativework: Pbroks13 (talk) Archimedian_spiral.PNG: User Mets501 on en.wikipediaArchivo:Elps-slr-es.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Elps-slr-es.svg Licencia: Public Domain Contribuyentes: Mikm, translated by Rage againstArchivo:Imaginarynumber2.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Imaginarynumber2.svg Licencia: GNU Free Documentation License Contribuyentes: derivativework: Pbroks13 (talk) Imaginarynumber2.PNG: Mets501Archivo:Euler's formula.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Euler's_formula.svg Licencia: GNU Free Documentation License Contribuyentes: Originally createdby gunther using xfig, recreated in Inkscape by Wereon, italics fixed by lasindi.Archivo:Polar coordinates integration region.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Polar_coordinates_integration_region.svg Licencia: Public Domain Contribuyentes: Jitse NiesenArchivo:Polar coordinates integration Riemann sum.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Polar_coordinates_integration_Riemann_sum.svg Licencia: PublicDomain Contribuyentes: Jitse NiesenArchivo:Cylindrical coordinates2.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cylindrical_coordinates2.svg Licencia: Creative Commons Attribution-ShareAlike 3.0Unported Contribuyentes: Cronholm144Archivo:Spherical Coordinates (Colatitude, Longitude).svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Spherical_Coordinates_(Colatitude,_Longitude).svg Licencia: PublicDomain Contribuyentes: InductiveloadArchivo:Commons-logo.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Commons-logo.svg Licencia: logo Contribuyentes: SVG version was created by User:Grunt andcleaned up by 3247, based on the earlier PNG version, created by Reidab.Archivo:El circulo.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:El_circulo.svg Licencia: Public Domain Contribuyentes: Editor at Large, Grafite, Magister Mathematicae, 4ediciones anónimasArchivo:Acimut.JPG Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Acimut.JPG Licencia: Public Domain Contribuyentes: Claudio EliasArchivo:Arco1.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Arco1.png Licencia: Public Domain Contribuyentes: BenduKiwi, Drandstrom, 1 ediciones anónimasArchivo:Radian cropped color.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Radian_cropped_color.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: User:Stannered. Original image by en:User:IxphinArchivo:Radian-common.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Radian-common.svg Licencia: GNU Free Documentation License Contribuyentes: Traced byUser:StanneredArchivo:Degree-Radian Conversion.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Degree-Radian_Conversion.svg Licencia: Public Domain Contribuyentes: InductiveloadArchivo:Cartesian-coordinate-system.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cartesian-coordinate-system.svg Licencia: GNU Free Documentation License Contribuyentes: K. BolinoArchivo:Cartesian-coordinate-system-with-circle.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cartesian-coordinate-system-with-circle.svg Licencia: GNU FreeDocumentation License Contribuyentes: User 345Kai on en.wikipediaArchivo:Drini-conjugatehyperbolas.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Drini-conjugatehyperbolas.png Licencia: Creative Commons Attribution-Sharealike 2.0 Contribuyentes: Maksim, Stannered, 1 ediciones anónimasArchivo:Recta real.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Recta_real.svg Licencia: Public Domain Contribuyentes: HiTeArchivo:coordenadas cartesianas.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Coordenadas_cartesianas.png Licencia: GNU Free Documentation License Contribuyentes:http://enciclopedia.us.es/index.php/Usuario:WillyArchivo:coordenadas cartesianas espaciales.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Coordenadas_cartesianas_espaciales.png Licencia: GNU Free DocumentationLicense Contribuyentes: Amada44, Bryan Derksen, Darapti, YrithinndArchivo:Traslación del origen en coordenadas cartesianas.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Traslación_del_origen_en_coordenadas_cartesianas.png Licencia:GNU Free Documentation License Contribuyentes: Amada44, AnyFile, YrithinndArchivo:Rotación alrededor del origen en coordenadas cartesianas.png Fuente:https://es.wikipedia.org/w/index.php?title=Archivo:Rotación_alrededor_del_origen_en_coordenadas_cartesianas.png Licencia: GNU Free Documentation License Contribuyentes: Amada44,Czupirek, YrithinndArchivo:matriz de transformación (rotación).png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Matriz_de_transformación_(rotación).png Licencia: GNU Free DocumentationLicense Contribuyentes: Amada44, Yrithinnd, 1 ediciones anónimasImagen:Cylindrical coordinate surfaces.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cylindrical_coordinate_surfaces.png Licencia: Creative Commons Attribution 3.0 Contribuyentes: WillowWImagen:Cylindrical with grid.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cylindrical_with_grid.svg Licencia: GNU Free Documentation License Contribuyentes:AndeggsImagen:Lineas_coordenadas_cilindricas.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Lineas_coordenadas_cilindricas.png Licencia: GNU Free Documentation License Contribuyentes: Original uploader was Gonfer at es.wikipediaArchivo:Poiseuille_profile.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Poiseuille_profile.png Licencia: GNU Free Documentation License Contribuyentes: Originaluploader was Gonfer at es.wikipediaArchivo:Uniform curl.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Uniform_curl.svg Licencia: GNU Free Documentation License Contribuyentes: Original uploader wasLoodog at en.wikipediaArchivo:Curl of uniform curl.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Curl_of_uniform_curl.png Licencia: Public Domain Contribuyentes: Glosser.ca

Fuentes de imagen, Licencias y contribuyentes 71
Archivo:Nonuniform curl.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Nonuniform_curl.svg Licencia: Public Domain Contribuyentes: Glosser.caArchivo:Curl of nonuniform curl.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Curl_of_nonuniform_curl.png Licencia: Public Domain Contribuyentes: Glosser.caImagen:Riemann sum convergence.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Riemann_sum_convergence.png Licencia: Creative Commons Attribution-ShareAlike 3.0Unported Contribuyentes: KSmrqFile:TrapRiemann2.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:TrapRiemann2.svg Licencia: Public Domain Contribuyentes: QefArchivo:FTC geometric.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:FTC_geometric.png Licencia: Public domain Contribuyentes: Magog the Ogre, Mdiagom, NandhpArchivo:Set partition.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Set_partition.svg Licencia: Free Art License Contribuyentes: Original uploader was Wshun aten.wikipedia Later versions were uploaded by Andrew pmk at en.wikipedia. Converted to SVG by Oleg Alexandrov 03:28, 28 July 2007 (UTC)Archivo:Intervalo real 01.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_01.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 04.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_04.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 03.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_03.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 02.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_02.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 06.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_06.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 05.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_05.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 08.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_08.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 07.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_07.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 09.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_09.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 20.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_20.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 21.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_21.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 23.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_23.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 10.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_10.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:Intervalo real 11.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Intervalo_real_11.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Dnu72Archivo:FunEsc Dominio 01.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:FunEsc_Dominio_01.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes:Dnu72Archivo:Transformación lineal de intervalos 02.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Transformación_lineal_de_intervalos_02.svg Licencia: Creative CommonsAttribution-Share Alike Contribuyentes: Dnu72Archivo:Translin.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Translin.png Licencia: Public Domain Contribuyentes: omArchivo:Number-line.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Number-line.svg Licencia: Creative Commons Zero Contribuyentes: Original uploader was MathsIsFunat en.wikipediaArchivo:1 Zahl mit Epsilon Umgebung.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:1_Zahl_mit_Epsilon_Umgebung.svg Licencia: Creative CommonsAttribution-ShareAlike 3.0 Unported Contribuyentes: 2_Zahlen_mit_Epsilon_Umgebung.svg: Epsilon_Umgebung.svg: Konvergenz.svg: Matthias Vogelgesang (Youthenergy) derivative work:Stephan Kulla (User:Stephan Kulla) derivative work: Stephan Kulla (User:Stephan Kulla) derivative work: Robot8A (talk)Image:Riemann Integration 3.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Riemann_Integration_3.png Licencia: Creative Commons Attribution 2.5 Contribuyentes:Darapti, EugeneZelenko, Juiced lemon, Juliusross, 1 ediciones anónimasImage:Riemann Integration 2.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Riemann_Integration_2.png Licencia: Creative Commons Attribution 2.5 Contribuyentes:Darapti, EugeneZelenko, Juliusross, 1 ediciones anónimasImage:Riemann Integration 4.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Riemann_Integration_4.png Licencia: Creative Commons Attribution 2.5 Contribuyentes:Darapti, EugeneZelenko, Juliusross, 1 ediciones anónimasImage:Riemann Integration 5.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Riemann_Integration_5.png Licencia: Creative Commons Attribution 2.5 Contribuyentes:Darapti, EugeneZelenko, Juliusross, 1 ediciones anónimas

Licencia 72
LicenciaCreative Commons Attribution-Share Alike 3.0//creativecommons.org/licenses/by-sa/3.0/