
Viscoelasticidad -...
20
Cap´ ıtulo 7 Viscoelasticidad La caracter´ ıstica definitoria de los materiales el´ asticos es que el estado tensional en un punto e instante depende exclusivamente de la deformaci´ on en dicho punto, e instante. Esta es una suposici´ on muy restrictiva y, aunque suficientemente aproximada para gran parte de los an´ alisis en ingenier´ ıa mec´ anica, civil y aeron´ autica, no existe ning´ un material que sea el´ astico en todo rango de deformaci´ on o de velocidad de deformaci´ on. En general, tanto la historia del material (es decir, el valor de la deformaci´ on pasada del punto) como la tasa de deformaci´ on, modifican el valor instant´ aneo de la tensi´ on. La incorporaci´ on de estos efectos complica las leyes constitutivas del material pero permiten modelar con m´ as precisi´ on los materiales reales. Existe una jerarqu´ ıa de modelos materiales que, a base de modelar m´ as efectos en las ecuaciones representan de manera m´ as fiel la respuesta de los s´ olidos reales. La viscoelasticidad supone una elaboraci´ on de la respuesta el´ astica que incorpora los efectos de dependencia de la velocidad de de- formaci´ on e historia. Estos efectos son imprescindibles para poder modelar s´ olidos que poseen fluencia y relajaci´on, dos comportamientos fundamenta- les en los pol´ ımeros, los suelos e incluso el hormig´ on. Adem´ as, tambi´ en es b´ asico modelar el amortiguamiento que sufren las ondas que se transmiten en los s´ olidos deformables. Dentro de la complejidad de estos modelos, nos centraremos en este cap´ ıtulo en la descripci´ on de la viscoelasticidad lineal que estudia la viscoelasticidad en el contexto de la cinem´ atica de peque˜ nas deformaciones. La forma m´ as sencilla de abordar la viscoelasticidad es mediante mo- delos reol´ ogicos. Este tipo de idealizaci´ on extiende el concepto del resorte y permite aproximarse de manera sencilla e intuitiva al comportamiento viscoel´ astico tensorial. De hecho, como se ver´ a en este cap´ ıtulo, los modelos viscoel´ asticos tensoriales se basan en una extensi´ on de los modelos reol´ ogicos al ´ ambito tridimensional. Antes de comenzar el estudio de la respuesta viscoel´ astica es necesario mencionar el papel fundamental que juega la temperatura como modula- 137
Transcript of Viscoelasticidad -...

Capıtulo 7
Viscoelasticidad
La caracterıstica definitoria de los materiales elasticos es que el estadotensional en un punto e instante depende exclusivamente de la deformacionen dicho punto, e instante. Esta es una suposicion muy restrictiva y, aunquesuficientemente aproximada para gran parte de los analisis en ingenierıamecanica, civil y aeronautica, no existe ningun material que sea elasticoen todo rango de deformacion o de velocidad de deformacion. En general,tanto la historia del material (es decir, el valor de la deformacion pasadadel punto) como la tasa de deformacion, modifican el valor instantaneo dela tension. La incorporacion de estos efectos complica las leyes constitutivasdel material pero permiten modelar con mas precision los materiales reales.
Existe una jerarquıa de modelos materiales que, a base de modelar masefectos en las ecuaciones representan de manera mas fiel la respuesta de lossolidos reales. La viscoelasticidad supone una elaboracion de la respuestaelastica que incorpora los efectos de dependencia de la velocidad de de-formacion e historia. Estos efectos son imprescindibles para poder modelarsolidos que poseen fluencia y relajacion, dos comportamientos fundamenta-les en los polımeros, los suelos e incluso el hormigon. Ademas, tambien esbasico modelar el amortiguamiento que sufren las ondas que se transmitenen los solidos deformables. Dentro de la complejidad de estos modelos, noscentraremos en este capıtulo en la descripcion de la viscoelasticidad linealque estudia la viscoelasticidad en el contexto de la cinematica de pequenasdeformaciones.
La forma mas sencilla de abordar la viscoelasticidad es mediante mo-delos reologicos. Este tipo de idealizacion extiende el concepto del resortey permite aproximarse de manera sencilla e intuitiva al comportamientoviscoelastico tensorial. De hecho, como se vera en este capıtulo, los modelosviscoelasticos tensoriales se basan en una extension de los modelos reologicosal ambito tridimensional.
Antes de comenzar el estudio de la respuesta viscoelastica es necesariomencionar el papel fundamental que juega la temperatura como modula-
137

138 Mecanica de solidos I. Romero
dor de la respuesta, especialmente en los polımeros. Estos materiales tienenuna temperatura, la llamada temperatura de transicion vıtrea, por debajo dela cual se comportan de manera fragil y no muestran ninguno de los com-portamientos caracterısticos de los materiales viscoelasticos. Por encima deesta temperatura, la respuesta reologica aparece y ademas es muy sensibleal valor de la temperatura. Existe una temperatura de fusion donde ya elmaterial deja de ser solido y cuya respuesta no estudiaremos aquı.
Para exposiciones mas completas de la teorıa de la viscoelasticidad sepuede consultar el texto clasico [3] o los mas recientes [? 5].
7.1. Modelos reologicos
Existen dos fenomenos, la fluencia y la relajacion, que son fundamentalesen el comportamiento de los solidos, y que no pueden modelarse con leyesconstitutivas elasticas. De hecho, la motivacion primera para el desarrollode la viscoelasticidad es la formulacion de modelos que puedan reproducirestos dos procesos.
Para acercarnos a estos modelos empleamos los llamadosmodelos reologi-cos, que son sistemas mecanicos elementales que capturan de forma sencillalos distintos tipos de comportamientos, a partir de una combinacion de re-sortes y amortiguadores.
� �
E
"
� �
"
⌘
Figura 7.1: Modelos simplificados de resorte y amortiguador.
En la Figura 7.1 se muestran los dos elementos basicos que empleare-mos para describir la viscoelasticidad. El muelle o resorte es el elementoelastico basico. Cuando se somete a una tension � sufre una deformacion "cuya valor es
" =�
E, (7.1)
siendo E la constante de rigidez del resorte. Por su lado, el amortiguadores un elemento cuya tension es proporcional a la velocidad de deformaciony la relacion es:
� = ⌘" , (7.2)
siendo ˙( ) la notacion que emplearemos para indicar la derivada con respectoal tiempo.
Capıtulo 7. Viscoelasticidad 139
7.1.1. Fluencia
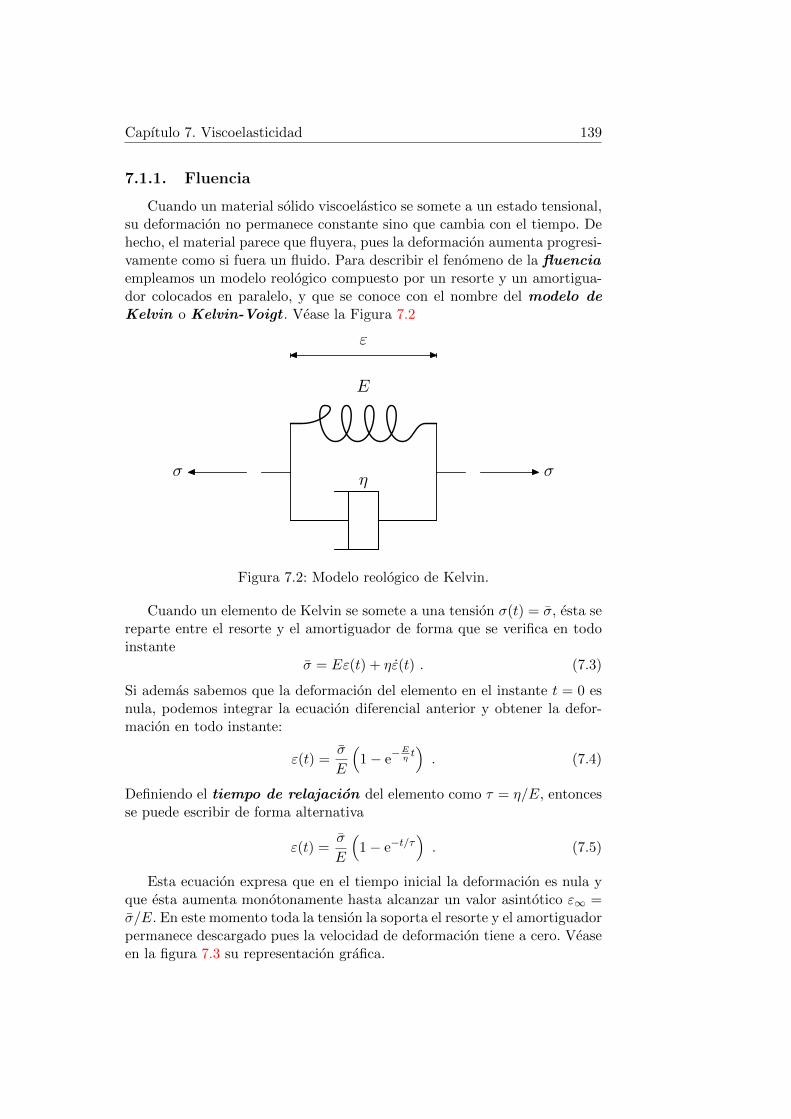
Cuando un material solido viscoelastico se somete a un estado tensional,su deformacion no permanece constante sino que cambia con el tiempo. Dehecho, el material parece que fluyera, pues la deformacion aumenta progresi-vamente como si fuera un fluido. Para describir el fenomeno de la fluenciaempleamos un modelo reologico compuesto por un resorte y un amortigua-dor colocados en paralelo, y que se conoce con el nombre del modelo deKelvin o Kelvin-Voigt . Vease la Figura 7.2
� �
"
⌘
E
Figura 7.2: Modelo reologico de Kelvin.
Cuando un elemento de Kelvin se somete a una tension �(t) = �, esta sereparte entre el resorte y el amortiguador de forma que se verifica en todoinstante
� = E"(t) + ⌘"(t) . (7.3)
Si ademas sabemos que la deformacion del elemento en el instante t = 0 esnula, podemos integrar la ecuacion diferencial anterior y obtener la defor-macion en todo instante:
"(t) =�
E
⇣
1� e�E
⌘
t⌘
. (7.4)
Definiendo el tiempo de relajacion del elemento como ⌧ = ⌘/E, entoncesse puede escribir de forma alternativa
"(t) =�
E
⇣
1� e�t/⌧⌘
. (7.5)
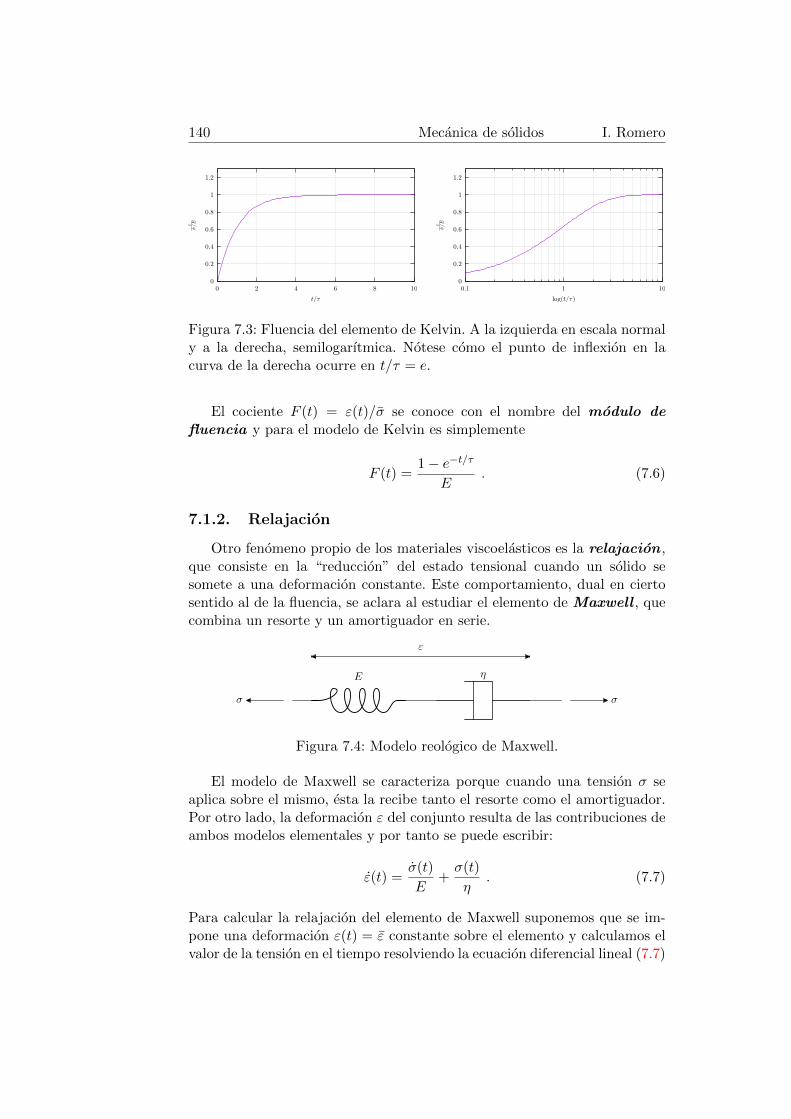
Esta ecuacion expresa que en el tiempo inicial la deformacion es nula yque esta aumenta monotonamente hasta alcanzar un valor asintotico "1 =�/E. En este momento toda la tension la soporta el resorte y el amortiguadorpermanece descargado pues la velocidad de deformacion tiene a cero. Veaseen la figura 7.3 su representacion grafica.
140 Mecanica de solidos I. Romero
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10
"�/E
t/⌧
0
0.2
0.4
0.6
0.8
1
1.2
0.1 1 10
"�/E
log(t/⌧)
Figura 7.3: Fluencia del elemento de Kelvin. A la izquierda en escala normaly a la derecha, semilogarıtmica. Notese como el punto de inflexion en lacurva de la derecha ocurre en t/⌧ = e.
El cociente F (t) = "(t)/� se conoce con el nombre del modulo defluencia y para el modelo de Kelvin es simplemente
F (t) =1� e�t/⌧
E. (7.6)
7.1.2. Relajacion
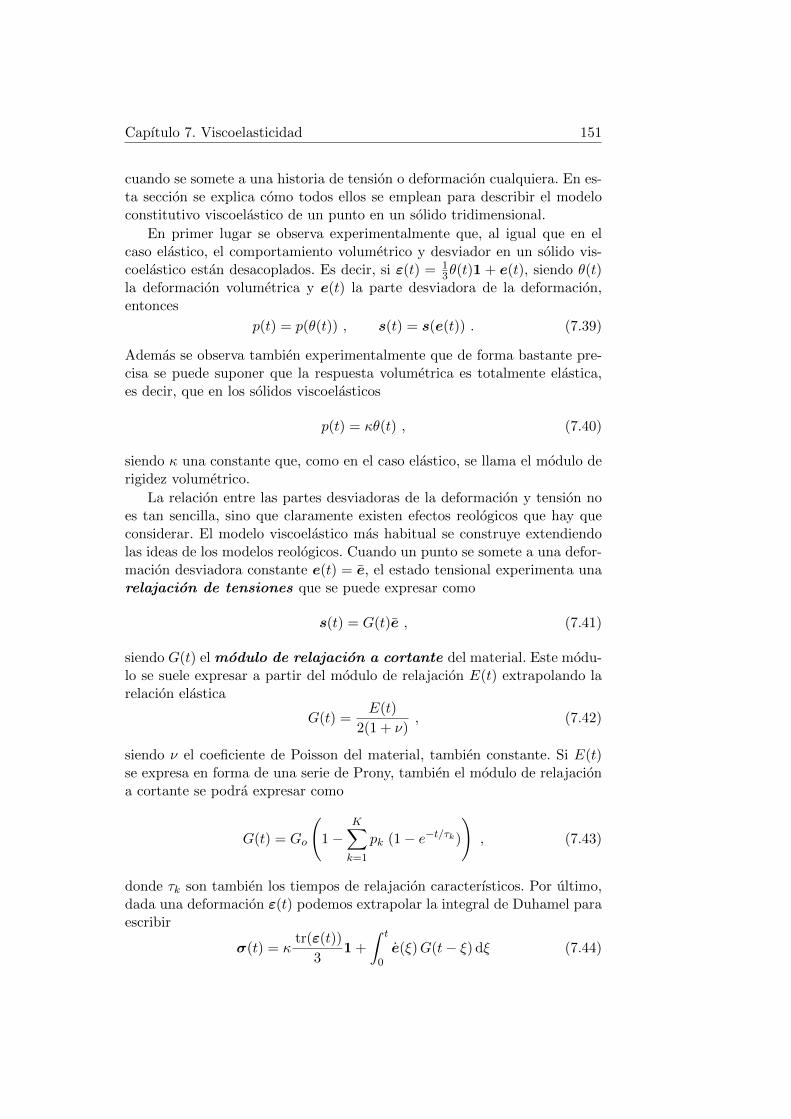
Otro fenomeno propio de los materiales viscoelasticos es la relajacion ,que consiste en la “reduccion” del estado tensional cuando un solido sesomete a una deformacion constante. Este comportamiento, dual en ciertosentido al de la fluencia, se aclara al estudiar el elemento de Maxwell , quecombina un resorte y un amortiguador en serie.
� �
"
E ⌘
Figura 7.4: Modelo reologico de Maxwell.
El modelo de Maxwell se caracteriza porque cuando una tension � seaplica sobre el mismo, esta la recibe tanto el resorte como el amortiguador.Por otro lado, la deformacion " del conjunto resulta de las contribuciones deambos modelos elementales y por tanto se puede escribir:
"(t) =�(t)
E+
�(t)
⌘. (7.7)
Para calcular la relajacion del elemento de Maxwell suponemos que se im-pone una deformacion "(t) = " constante sobre el elemento y calculamos elvalor de la tension en el tiempo resolviendo la ecuacion diferencial lineal (7.7)

Capıtulo 7. Viscoelasticidad 141
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10
� "E
t/⌧
0
0.2
0.4
0.6
0.8
1
1.2
0.1 1 10
� "E
log(t/⌧)
Figura 7.5: Relajacion del elemento de Maxwell. A la izquierda en escalanormal y a la derecha, semilogarıtmica. Notese como el punto de inflexionen la curva de la derecha ocurre en t/⌧ = e.
empleando la condicion inicial �(0) = E". La solucion de esta es:
�(t) = E " e�t/⌧ (7.8)
La relacion �(t)/" se conoce como el modulo de relajacion
R(t) = E e�t/⌧ . (7.9)
7.1.3. El solido lineal estandar
Como acabamos de ver el modelo de Kelvin experimenta una respuestaal someterlo a una tension constante que se puede identificar con la fluencia.Por su parte, el elemento de Maxwell exhibe relajacion de tensiones al so-meterlo a un campo de deformaciones constante. Sin embargo, ninguno delos dos modelos es capaz de representar ambos fenomenos y por tanto, paraacercarnos mas al estudio del comportamiento viscoelastico debemos em-plear un modelo reologico algo mas complejo. El modelo del solido linealestandar combina un elemento de Maxwell en paralelo con un resorte, co-mo se indica en la Figura 7.6 (en algunos trabajos se define un solido linealdistinto con un elemento de Kelvin en serie con un resorte).
Repartiendo la tension � entre las dos ramas del elemento y la defor-macion " entre los dos componentes del elemento de Maxwell se obtiene laecuacion diferencial que describe el comportamiento del solido estandar:
�(t) +E
1
⌘�(t) = (E
1
+ E1)"(t) +E
1
E1⌘
"(t) (7.10)
Si definimos el tiempo de relajacion ⌧ = ⌘/E1
entonces la relacion anteriortambien se puede expresar como
�(t) +�(t)
⌧= (E
1
+ E1)"(t) +E1⌧
"(t) (7.11)
A partir de la ecuacion diferencial anterior podemos calcular los modulosde fluencia y relajacion del elemento estandar. Si la tension aplicada sobre

142 Mecanica de solidos I. Romero
E1⌘
�
E1
� �
"
Figura 7.6: El modelo del solido lineal estandar.
el elemento estandar es �(t) = � constante y la deformacion inicial "(0) =�/(E
1
+ E1) encontramos que
"(t) =�
E1
✓
1� E1
E1
+ E1e� E1
E1+E1t
⌧
◆
(7.12)
y por lo tanto el modulo de fluencia F (t) = "(t)/� sera
F (t) =1
E1
✓
1� E1
E1
+ E1e� E1
E1+E1t
⌧
◆
(7.13)
Como en el caso del elemento de Kelvin, podemos obtener el modulo derelajacion sometiendo el elemento a una deformacion constante "(t) = " yrazonando que la tension inicial vale �(0) = (E
1
+E1)" que permite obtener
R(t) = E1 + E1
e�t/⌧ . (7.14)
. Ejemplo 7.1.1. Sobre un cilindro de 200 mm de longitud y 40 mm2 deseccion se coloca un peso de 100 N y se registra, como se indica en la figu-ra 7.7, la longitud en cada instante del cilindro. Si se supone que el modelodel solido lineal estandar es una buena aproximacion para la respuesta delmaterial del tubo, ¿Cuales son los valores de E1, E
1
, ⌘ del mismo?La grafica de la figura 7.7 representa la longitud instantanea del cilin-
dro durante un ensayo de fluencia, cuando la tension es � = �100/40 =�2,5 MPa, por lo cual podemos obtener los datos pedidos a partir de larelacion
"(t) = F (t)�,
siendo F la funcion de fluencia 7.13. Cuando el tiempo transcurrido en elensayo es muy grande (t ! 1) la deformacion longitudinal del cilindro eslımt!1 "(t) = 192�200
200
= �0,04. Ademas, el valor de la funcion de fluenciaes lımt!1 F (t) = 1
E1, y por lo tanto
�0,04 =1
E1(�2,5) ,

Capıtulo 7. Viscoelasticidad 143
LF = 100 N
A = 40 mm2
t (h)
L (mm)
192
2
194
4
196
6
198
8
200
10
Figura 7.7: Ejemplo 7.1.1
y concluimos que E1 = 62,5 MPa. Ademas, cuando t = 0, la deformacionlongitudinal es "(0) = 198�200
200
= �0,01 y F (0) = 1
E1+E1, por lo que se
sigue que E1
= 187,5 MPa. Finalmente, para encontrar ⌧ necesitamos unpunto mas en la history de la evolucion de ✏. Por ejemplo, para t = 2 h, ladeformacion longitudinal es "(2) = 194�200
200
= �0,03 y podemos despejar elvalor del tiempo caracterıstico de la relacion
�0,03 =1
62,5
✓
1� 62,5
62,5 + 187,5exp
� 62,5
62,5 + 187,5
2
⌧
�◆
,
obteniendo ⌧ = 0,46 h. El coeficiente viscoso es, finalmente, ⌘ = ⌧E1
=85,33 MPa·h. /
7.1.4. El modelo de Maxwell generalizado
El modelo del solido estandar se puede generalizar, incrementando elnumero de elementos de Maxwell en paralelo, como en el ejemplo de la Figu-ra 7.8. Cuando se aumenta el numero de elementos de Maxwell, el elementoresultante tiene un mayor numero de tiempos de relajacion caracterısticos
⌧k = ⌘k/Ek , (7.15)
y el modulo de relajacion que resulta es
R(t) = E1 +KX
k=1
Ek e�t/⌧
k , (7.16)
siendo K el numero de elementos de Maxwell en paralelo. Este modeloreologico recibe el nombre de modelo de Maxwell generalizado o mo-delo de Wiechert .

144 Mecanica de solidos I. Romero
E1⌘1
�1
E1
E2⌘2
�2
E3⌘3
�3
E4⌘4
�4
� �
"
Figura 7.8: Modelo de Maxwell generalizado con 5 elementos de Maxwell enparalelo
En general, el valor de las rigideces E1, Ek y de los tiempos de relaja-cion ⌧k de cada elemento se escoge de forma que la funcion de relajacionse ajuste a los valores obtenidos de forma experimental. Las series de laforma (7.16) se llaman series de Prony y existen varios metodos espe-cialmente disenados para seleccionar los parametros de Prony y ajustar larespuesta [4, 6, 2]. De hecho, este tipo de series se emplea a menudo en teorıade la senal.
7.1.5. La integral de Duhamel
Todos los modelos reologicos explicados en esta seccion se describen conecuaciones diferenciales lineales de coeficientes constantes. Este resultadoexpresa analıticamente el principio de Boltzmann que establece que larespuesta viscoelastica es funcion, en cada instante, de la historia de defor-macion y que cada escalon de deformacion contribuye de forma indepen-diente al valor de la tension, siendo el valor total la suma de cada una de lascontribuciones. Este resultado se puede utilizar para obtener la respuesta

Capıtulo 7. Viscoelasticidad 145
0
20
40
60
80
100
0 5 10 15 20
E(t)/E
1
t
" = 5" = 10" = 20
Figura 7.9: Modulos de relajacion para tres escalones de deformacion distin-tos. Ilustracion de la linealidad en la respuesta viscoelastica
en tension a cualquier deformacion "(t), no necesariamente la del ensayo derelajacion.
Para ello, recordamos que la funcion de Heaviside, o escalon unidad, sedefine como
H⇠(t) =
(
0 si t < ⇠ ,
1 si t � ⇠ ,(7.17)
verificandose ademas que
H⇠(t) = H0
(t� ⇠) . (7.18)
Llamemos �R[f ] a la respuesta reologica correspondiente a una deforma-cion f . El modulo de relajacion R(t) se ha calculado hasta ahora como larespuesta a un escalon unitario de deformacion en el instante t = 0, es de-cir, R(t) = �R[H0
](t). Sin embargo, si el escalon se produce en t = ⇠, esimmediato comprobar que la respuesta es simplemente �R[H⇠] = R(t � ⇠).Dicho de otra manera, la respuesta a una deformacion "(t) = H(t � ⇠) esR(t�⇠). El principio de Boltzmann establece ademas que la respuesta a unadeformacion "(t) = �"
1
H⇠1(t) +�"2
H⇠2(t) es
�R[�"1
H⇠1(t) +�"2
H⇠2(t)] = �"1
�R[H⇠1 ](t) +�"2
�R[H⇠2 ](t)
= �"1
R(t� ⇠1
) +�"2
R(t� ⇠2
) .(7.19)
En el lımite, cuando el numero de escalones es infinito, la deformacion sepuede escribir como
"(t) =
Z t
0
"(⇠)H⇠(t) d⇠ , (7.20)

146 Mecanica de solidos I. Romero
y por tanto la tension como
�(t) = �R
Z t
0
"(⇠) d⇠
�
=
Z t
0
�R ["(⇠)H⇠(t)] d⇠
=
Z t
0
"(⇠)R(t� ⇠) d⇠
(7.21)
Este integral, conocida como la integral de Duhamel , es una convolucionde la funcion de relajacion y la tasa de deformacion, y escribimos
� = " ⇤R , (7.22)
lo cual sugiere que el analisis de esta se puede simplificar empleando latransformada de Laplace.
7.2. Respuesta en frecuencia
Cuando un material elastico se somete a una tension que varıa en eltiempo, su deformacion tambien sera variable en el tiempo pero la relacionentre tension y deformacion sera siempre constante. Cuando un materialviscoelastico es sometido a una tension variable, la deformacion se desfasacon respecto a la tension.
Supongamos un material viscoelastico sometido a una deformacion armoni-ca
"(t) = " cos(!t) , (7.23)
siendo ! su frecuencia. En general, la tension no estara en fase con la defor-macion sino que sera de la forma
�(t) = � cos(!t+ �) = � cos(�) cos(!t)� � sin(�) sin(!t) , (7.24)
que se puede escribir de forma alternativa como
�(t) = �0 cos(!t)� �00 sin(!t) , siendo
(
�0 = � cos(�) ,
�00 = � sin(�) .(7.25)
Estudiando la relacion entre deformacion y tension usando numeros com-plejos, tal y como se hace en teorıa de circuitos, observamos que la defor-macion y tension se pueden expresar como las partes reales de los complejos
"c = " ei!t , �c = � ei(!t+�) , (7.26)
donde � se puede interpretar ahora como el angulo de adelanto de la tensionrespecto a la deformacion. Reescribiendo la tension como
�c = � ei� ei!t = (� cos(�) + i � sin(�)) ei!t = (�0 + i�00) ei!t , (7.27)

Capıtulo 7. Viscoelasticidad 147
e imponiendo una relacion entre tension y deformacion de la forma
�c = Ec "c , (7.28)
se sigue que el modulo de rigidez complejo Ec ha de ser de la forma
Ec = E0 + i E00 con E0 = frac�0" , E00 =�00
", (7.29)
Estas dos cantidades se conocen, respectivamente, como el modulo de al-macenamiento y de perdida del material y su ratio coincide con la tan-gente de �, dependen de la frecuencia !. Las relaciones E0(!) y E00(!00)caracterizan completamente la respuesta viscoelastica lineal de un material,y por ello se obtienen habitualmente y se emplean para describir las propie-dades mecanica de los materiales viscoelasticos. En ocasiones, se empleanexpresiones simplificadas para estos dos modulos como por ejemplo
Ec = Eco
⇣ !
2⇡
⌘a, (7.30)
siendo Eco una constante compleja y a un exponente real. Sin embargo, es
mas habitual describir la respuesta en frecuencia de un material medianteuna representacion grafica como la de la figura 7.10.
Figura 7.10: Modulos de almacenamiento y perdida como funciones de lafrecuencia en un policarbonato a 25oC (de Wikipedia).
La razon por la que E0 y E00 se conocen con los nombres de modulo dealmacenamiento y perdida tiene relacion con el balance energetico sobre unelemento visco-elastico. Para comprender el significado del modulo de perdi-da E00, supongamos un material viscoelastico sometido a una deformacion

148 Mecanica de solidos I. Romero
armonica como (7.23). Entonces, el trabajo que hay que hacer en un ciclode carga, por unidad de volumen del material es:
W =
Z
2⇡/!
0
�(t) "(t) dt
=
Z
2⇡/!
0
(E0" cos!t� E00" sin!t)(�!)" sin!t dt
=
Z
2⇡/!
0
"2 !(�E0 cos!t sin!t+ E00 sin2 !t) dt
= "2 ⇡E00 .
(7.31)
Se deduce, por tanto, que las perdidas, es decir, el trabajo necesario paradeformar armonicamente el material, es proporcional al modulo de perdida.La componente de la tension que esta en fase con la deformacion, �0 noproduce trabajo neto en un ciclo. Este trabajo es una funcion armonica deperiodo ⇡/! cuyo valor maximo instantaneo, 1
2
E0"2!, que es proporcionalal modulo de almacenamiento.
Como el modulo de rigidez complejo es el cociente entre la tension y ladeformacion complejas se sigue que
Ec =�c
"c=
�ei!tei�
"ei!t=
�ei�
"= Eei� (7.32)
por lo que Ec es un complejo de modulo E, angulo constante �, igual alangulo de desfase entre la tension y la deformacion complejas. El inverso delmodulo complejo es la flexibilidad compleja
Jc = (Ec)�1 =E0 � iE00
(E0)2 + (E00)2= J 0 � iJ 00 (7.33)
que permite expresar la relacion constitutiva "c = Jc�c.
7.2.1. Caracterizacion en frecuencia de los modelos reologi-cos elementales
Cuando la deformacion es de la forma (7.23), la tension en un elementode Kelvin es
�(t) = E" cos(!t)� ⌘"! sin(!t) = "E cos(!t)� "E⌧! sin(!t) . (7.34)
Identificando en esta expresion obtenemos que los modulos de almacena-miento y perdida en un elemento de Kelvin son:
E0(!) = E , E00(!) = E⌧! (7.35)

Capıtulo 7. Viscoelasticidad 149
0.000010
0.000100
0.001000
0.010000
0.100000
1.000000
10.000000
100.000000
0.01 0.1 1 10 100
! ⌧
E0/EE00/E
0.000010
0.000100
0.001000
0.010000
0.100000
1.000000
10.000000
100.000000
0.01 0.1 1 10 100
! ⌧
E0/EE00/E
Figura 7.11: Modulos de almacenamiento y perdida para los modelos deKelvin (arriba) y Maxwell (abajo).

150 Mecanica de solidos I. Romero
De la misma forma se puede calcular analıticamente la expresion de losmodulos de almacenamiento y perdida en el modelo de Maxwell:
E0(!) =E(!⌧)2
1 + (!⌧)2, E00(!) =
E(!⌧)
1 + (!⌧)2, (7.36)
En la Figura 7.11 se puede apreciar la dependencia de los modulos dealmacenamiento y perdida en los modelos de Kelvin Maxwell. En amboscasos se identifica un punto especial que corresponde a ! = 1/⌧ .
7.2.2. Series de Prony
Como se menciono anteriormente, dada la respuesta en frecuencia deun material como por ejemplo el de la Figura 7.10, se puede definir unmodelo de Maxwell generalizado cuya respuesta en frecuencia se ajuste conla tolerancia deseada a los datos experimentales del material. El metodo quese utiliza habitualmente es el basado en las llamadas series de Prony .
Las series de Prony describen las funciones de relajacion de la forma
RProny(t) = Eo
1�nX
i=1
pi(1� e�t/⌧i)
!
, (7.37)
siendo E0
el modulo de rigidez instantanea, pi los coeficientes de Prony y ⌧ilos tiempos de relajacion caracterısticos.
Dado un modelo basado en series de Prony, se puede demostrar que losmodulos de almacenamiento y perdida tienen por expresion [1]:
E0(!) = Eo
1�nX
i=1
pi
!
+ Eo
nX
i=1
pi⌧2i !2
1 + ⌧2i !2
,
E00(!) = Eo
nX
i=1
pi⌧i!
1 + ⌧2i !2
.
(7.38)
No existe ninguna formula que invierta esta relacion, es decir, que permitacalcular directamente los parametros de Prony a partir de los modulos dealmacenamiento y perdida.
7.3. Solidos deformables viscoelasticos
En este capıtulo se ha estudiado, hasta ahora, la respuesta viscoelasticade modelos reologicos unidimensionales. El objetivo ha sido presentar losaspectos fundamentales del comportamiento viscoelastico de la manera massencilla posible. Utilizando los resultados obtenidos se puede calcular la res-puesta de un elemento unidimensional viscoelastico (una barra, por ejemplo)
Capıtulo 7. Viscoelasticidad 151
cuando se somete a una historia de tension o deformacion cualquiera. En es-ta seccion se explica como todos ellos se emplean para describir el modeloconstitutivo viscoelastico de un punto en un solido tridimensional.
En primer lugar se observa experimentalmente que, al igual que en elcaso elastico, el comportamiento volumetrico y desviador en un solido vis-coelastico estan desacoplados. Es decir, si "(t) = 1
3
✓(t)1 + e(t), siendo ✓(t)la deformacion volumetrica y e(t) la parte desviadora de la deformacion,entonces
p(t) = p(✓(t)) , s(t) = s(e(t)) . (7.39)
Ademas se observa tambien experimentalmente que de forma bastante pre-cisa se puede suponer que la respuesta volumetrica es totalmente elastica,es decir, que en los solidos viscoelasticos
p(t) = ✓(t) , (7.40)
siendo una constante que, como en el caso elastico, se llama el modulo derigidez volumetrico.
La relacion entre las partes desviadoras de la deformacion y tension noes tan sencilla, sino que claramente existen efectos reologicos que hay queconsiderar. El modelo viscoelastico mas habitual se construye extendiendolas ideas de los modelos reologicos. Cuando un punto se somete a una defor-macion desviadora constante e(t) = e, el estado tensional experimenta unarelajacion de tensiones que se puede expresar como
s(t) = G(t)e , (7.41)
siendo G(t) el modulo de relajacion a cortante del material. Este modu-lo se suele expresar a partir del modulo de relajacion E(t) extrapolando larelacion elastica
G(t) =E(t)
2(1 + ⌫), (7.42)
siendo ⌫ el coeficiente de Poisson del material, tambien constante. Si E(t)se expresa en forma de una serie de Prony, tambien el modulo de relajaciona cortante se podra expresar como
G(t) = Go
1�KX
k=1
pk (1� e�t/⌧k)
!
, (7.43)
donde ⌧k son tambien los tiempos de relajacion caracterısticos. Por ultimo,dada una deformacion "(t) podemos extrapolar la integral de Duhamel paraescribir
�(t) = tr("(t))
31+
Z t
0
e(⇠)G(t� ⇠) d⇠ (7.44)

152 Mecanica de solidos I. Romero
7.4. Efectos de la temperatura en la respuesta vis-coelastica
La temperatura a la que un material viscoelastico se encuentra modificasustancialmente su respuesta. Afortunadamente, en muchos casos, la depen-dencia en la temperatura se puede aproximar de forma sencilla y con unaprecision suficiente.
Figura 7.12: Curva maestra de relajacion para poli-iso-butileno y dependen-cia de la misma con la temperatura.
En general, el aumento de la temperatura disminuye la viscosidad de losmateriales, o lo que es lo mismo, los tiempos de relajacion. Para muchosmateriales existe una correspondencia temperatura-tiempo que se ma-nifiesta en que un aumento de la temperatura traslada la curva de relajacionhacia la izquierda, siendo este desplazamiento funcion monotona del saltotermico. Ademas, se comprueba que la forma de la curva de relajacion ape-nas cambia con la temperatura, y por tanto la correspondencia mencionadaproporciona suficiente precision para calculos a diferentes temperaturas, sise conoce dicha curva para una unica temperatura de referencia.
Si se llama aT a este “desplazamiento”, se puede definir como la relacionde viscosidades a las dos temperaturas comparadas,
aT =⌘T⌘T
g
, (7.45)
siendo Tg la temperatura de referencia. Por tanto, las respuestas de relaja-cion RT y RT
g
verifican
RT (t) = RTg
(aT t) . (7.46)

Capıtulo 7. Viscoelasticidad 153
La figura 7.13 muestra una interpretacion grafica de este resultado.Existen formulas empıricas que permiten calcular el factor aT en funcion
de la temperatura actual y la de referencia. Por ejemplo, la relacion deWilliams-Landel-Ferry establece que este “desplazamiento” es
log aT = � A(T � Tg)
B + T � Tg, (7.47)
siendo A y B dos constantes que dependen del material y de la temperaturade referencia Tg.
0.1
1
10
100
0.01 0.1 1 10 100 1000
log(R(t)/R
1)
log(t/⌧)
Figura 7.13: Ejemplo de la correspondencia temperatura-tiempo. La curvade relajacion azul se “desplaza” hacia la izquierda cuando la temperaturaaumenta. El desplazamiento es constante y unicamente funcion de la tem-peratura.
Problemas
7.1. (Termodinamica del modelo estandar) El modelo estandar viene defini-do por una energıa libre (para problemas isotermos) y una relacion cinetica
A(", �) =1
2E1"2 +
1
2E
1
("� �)2 , � = ⌘E1
("� �).
a) Interpreta las dos contribuciones de la energıa libre.
b) Razona por que la ecuacion cinetica expresa la relacion constitutivahabitual del amortiguador � = ⌘�.
c) Utilizando los resultados del capıtulo 8.39, demuestra que el modeloanterior es termodinamicamente correcto.

154 Mecanica de solidos I. Romero
� �
"
�
⌘
E1
E2
Figura 7.14: Solido viscoelastico estandar basado en el modelo de Kelvin.
7.2. Para el modelo estandar de la figura 7.14,
a) Encuentra la ecuacion diferencial que gobierna su respuesta.
b) Encuentra la funcion de fluencia.
c) Calcula la funcion de relajacion.
7.3. Calcula los modulos de perdida y almacenamiento de un elementoreologico que tiene por funcion de relajacion R(t) = R1 +R
1
e�t/⌧ ,
7.4. Un peso de 10 kg se cuelga con una cuerda de 4 m de longitud y 4 mm2
de seccion. El material de la cuerda es viscoelastico, y su comportamiento sepuede describir con un modelo estandar de constantes E
1
= 3 GPa, E1 = 2GPa, ⌘ = 1 GPa·s. Dibuja un grafica con la evolucion de la longitud de lacuerda e indica cual es la longitud maxima que esta alcanzara.
0
10
20
30
40
50
0 2 4 6 8 10 12 14
�(M
Pa)
t (s)
Figura 7.15: Historia de cargas del problema 7.5.

Bibliografıa 155
7.5. Un material viscoelastico se representa con un modelo reologico deKelvin de constantes E = 2 GPa y ⌘ = 1 GPa·s. Calcular la historia dedeformacion en el mismo cuando se somete a una tension como la indicadaen la figura 7.15.
7.6. Una generador de energıa electrica se coloca sobre una base de volumen0.01 m3 de forma que se puede considerar, en una primera aproximacion,que el estado de carga de la base es de compresion uniaxial, de valor 20 MPa.El material de la base es viscoelastico y se conoce su respuesta en frecuenciaen algunos puntos:
! E0 E00
(Hz) (GPa) (GPa)20 2.1 1.040 2.0 1.360 1.8 1.580 1.1 2.1
Si la maquina esta funcionando a 50 Hz, calcular el calor disipado por labase en 10 minutos de funcionamiento.
Bibliografıa
[1] ABAQUS theory manual, 6.7 edition.
[2] Tzikang Chen. Determining a prony series for a viscoelastic material fromtime varying strain data. Technical Report NASA/TM-2000-210123,U.S. Army Research Laboratory, 2000.
[3] Wilhem Flugge. Viscoelasticity. Blaisdell Publishing Company, 1967.
[4] SW Park and RA Schapery. Methods of interconversion between linearviscoelastic material functions. Part I—a numerical method based onProny series. International Journal of Solids and Structures, 36(11):1653–1675, 1999.
[5] Nhan Phan-Thien. Understanding viscoelasticity. Basis of rheology.Springer, 2002.
[6] R A Schapery and S W Park. Methods of interconversion between linearviscoelastic material functions. Part II—An approximate analytical met-hod. International Journal of Solids and Structures, 36(11):1677–1699,1999.
156 Mecanica de solidos I. Romero


















