Universidad de Castilla-La Mancha - Tema 3A - Busquedas v1.2.… · Búsqueda no informada...
95
Universidad de Castilla-La Mancha Inteligencia Artificial e Ingeniería del Conocimiento Tema3: Métodos de búsqueda de soluciones (Búsqueda no informada) Profesores: Luis Jiménez Linares. Luis Enrique Sánchez Crespo.
Transcript of Universidad de Castilla-La Mancha - Tema 3A - Busquedas v1.2.… · Búsqueda no informada...

Universidad de Castilla-La Mancha Inteligencia Artificial e Ingeniería del Conocimiento
Tema3: Métodos de búsqueda de soluciones (Búsqueda no informada)
Profesores:
Luis Jiménez Linares.
Luis Enrique Sánchez Crespo.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
2 de 94
Datos de la Asignatura Temarío
Introducción a la IA. (Cap. 1)
Introducción a los Agentes Inteligentes (Cap. 2)
Métodos de búsqueda de soluciones (Cap. 3-7)
– Simple sin información.
– Con información (Heurística).
– Utilizando el azar (Enfriamiento).
– Metamodelos (Búsqueda tabú).
Sistemas basados en el conocimiento (Cap. 8-12)
– Mediante lógica de predicados.
– Mediante Sistemas de producción.
Tratamiento de la incertidumbre (Cap. 13-15)
– Redes Bayesianas.
– Razonamiento aproximado (lógica difusa).

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
3 de 94
Búsqueda no informada
Agentes resolventes-problemas.
Ejemplos de problemas.
Búsqueda de soluciones.
Estrategias de búsqueda no informada.
Evitar estados repetidos.
Búsqueda con información parcial.
Resumen.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
4 de 94
Búsqueda no informada
Agentes resolventes-problemas

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
5 de 94
Búsqueda no informada
Agentes resolvente-problemas:
– Deciden que hacer para encontrar secuencias de
acciones que conduzcan a los estados deseables.
– Son no informados porque no dan información sobre el
problema, tan solo su definición.
Agentes resolvedores de problemas:
– Formulación del objetivo.
– Formulación del problema.
– Fase de búsqueda: buscar siguiendo secuencia
búsqueda-acción.
– Fase de ejecución.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
6 de 94
Búsqueda no informada
El agente sigue un plan muy simple, diseñado así: “formular, buscar,
ejecutar” – esto último según estrategia o “recomendación”
función AGENTE-SENCILLO-RESOLVEDOR-de-PROBLEMAS(percepción)
retorna acción
entradas: p, una percepción
estático s, una secuencia de acciones (cola de nodos candidatos a expandir),
inicialmente vacía
estado, una descripción del estado actual del mundo
g, una meta, originalmente nula
problema, una formulación del problema
si s = vacío entonces
g Formular-Meta (estado)
problema Formular-Problema(estado, g)
s Búsqueda(problema)
terminar_si se llega a la meta g. En el otro caso:
estado Actualizar-Estado(estado, p)
acción Recomendación(s, estado) s Saldo_de_la_cola(s, estado)
retornar acción

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
7 de 94
Búsqueda no informada
Problemas y soluciones bien definidos:
– Estado inicial en el que comienza el agente.
– Acciones disponibles para el agente.
• Función sucesor.
• Espacio de estados.
– Test objetivo.
– Coste del camino.
Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
8 de 94
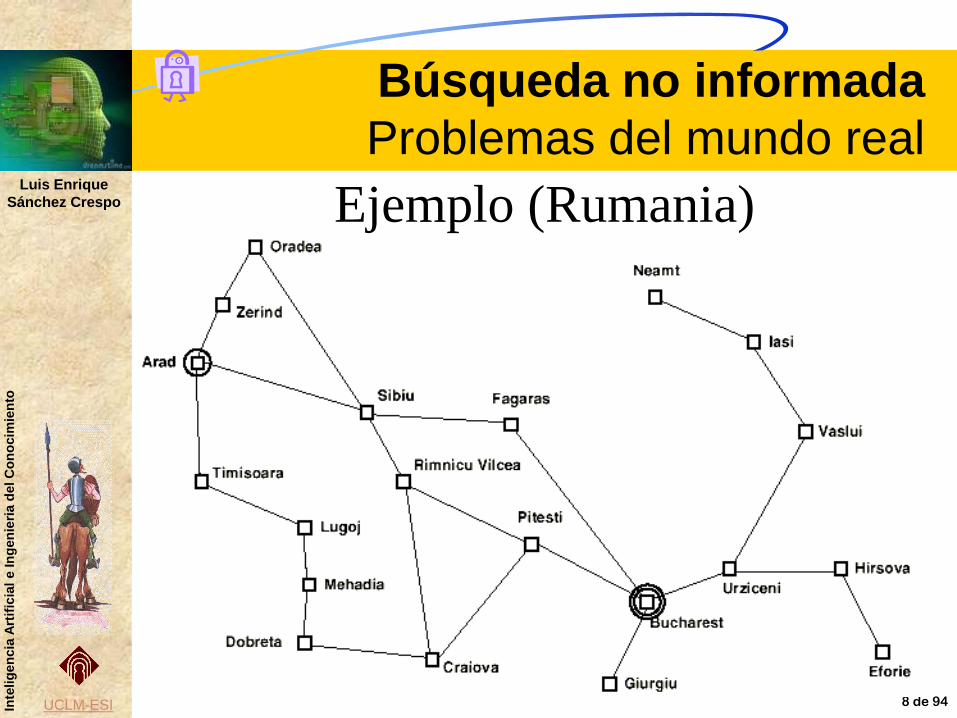
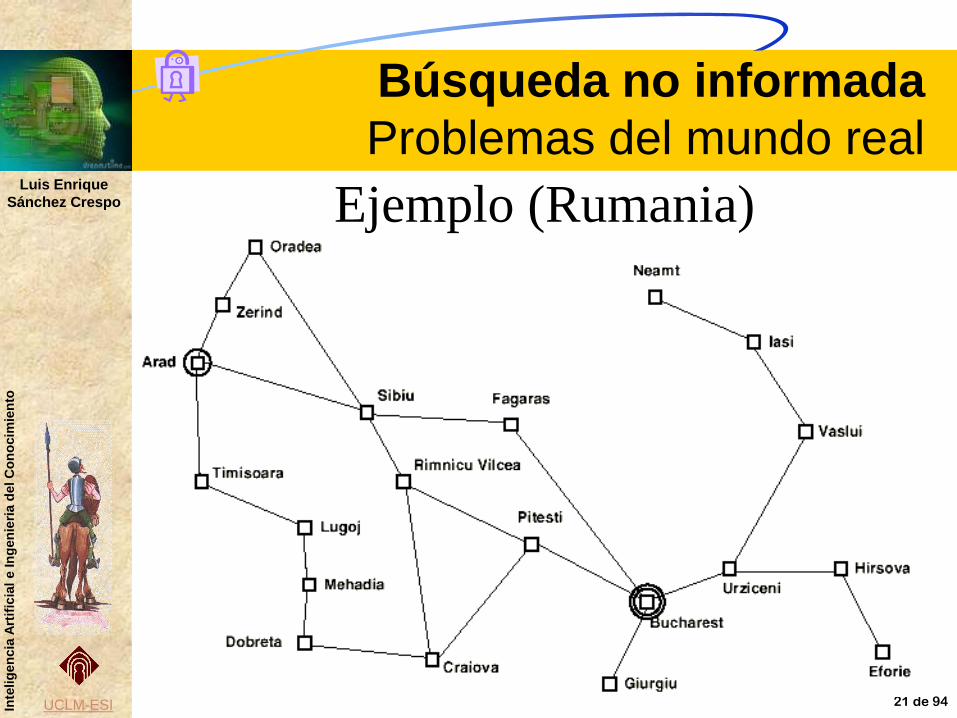
Búsqueda no informada
Problemas del mundo real
Ejemplo (Rumania)

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
9 de 94
Búsqueda no informada
Formular los problemas:
– Tipificar los problemas.
– Definir el espacio de estados del problema.
– Medir el buen éxito en la solución del problema.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
10 de 94
Búsqueda no informada
Tipificación de problemas Determinístico, accessible problema de estado único
– agente tiene suficiente información y sabe en qué estado está
– resultado de las acciones - conocido
Determinístico, inaccessible probl. múltiples estados (multiestado)
– acceso limitado a estado del mundo
– requiere de un agente que razone sobre conjuntos de estados a los que
puede llegar
Indeterminístico, inaccessible probl. de contingencia
– Durante la ejecución debe usar sensores
– ninguna acción fija garante buena solución - debe buscar por el árbol
entero
– a menudo debe entremezclar búsqueda - ejecución
Espacio de estado desconocido probl. de exploración (“en línea”)
– la única esperanza es usar el aprendizaje - aprendizaje reforzado- para
buscar los potenciales resultados de acciones e información acerca de
estados

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
11 de 94
Búsqueda no informada Definición de problemas (multi-estado)
Estado inicial (conjunto de estados)
Operadores
– (determinar el conjunto de estados accesibles)
Test o prueba de meta
– (para saber si un dado estado es o nó la meta)
– (debe ser satisfecho por cada uno de los estados del
conjunto)
Función de costo de ruta g

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
12 de 94
Búsqueda no informada
Seleccionar un espacio de estados El mundo real es complejo
– el espacio de estado debe ser abstraído (reducido) para la solución de problemas
Estado (Abstracto) = conjunto de estados reales
Operador (Abstracto) = combinación compleja de acciones reales
– p.ej., “Arad Zerind” representa un conjunto complejo de rutas posibles, desviaciones, paradas técnicas, etc.
Para una realización garantida, cualquier estado real, “en Arad” , debe conectarse con algun estado real, “en Zerind” - aquí no caben abstracciones.
Solución (Abstracta) = colección de rutas reales que son soluciones en el mundo real
Cualquier acción abstracta debiera ser “más fácil” que el problema original!

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
13 de 94
Búsqueda no informada
Medición de buen éxito en la
solución del problema
Debe ser una medición correcta, p.ej.
costo de búsqueda = tiempo/memoria para encontrar la
solución
costo total = costo de trayectoria + costo de búsqueda

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
14 de 94
Búsqueda no informada
Ejemplos de problemas

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
15 de 94
Búsqueda no informada
Problemas de juguete
– 8 fichas (o 15)
– 4 reinas (o 6, u 8)
– Cript-aritmética
– mundo de la aspiradora
– misioneros y caníbales
– dos baldes

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
16 de 94
Búsqueda no informada
Ejemplo: Gráfico del espacio del mundo de la
aspiradora
Estados?
Operadores?
Test de meta?
Costo de trayectoria?

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
17 de 94
Búsqueda no informada
Problemas de juguete
Ejemplo: Mundo de Aspiradora
Estado único
– inicio en #5. Soluciones?
Estado múltiple
– inicio en {1,2,3,4,5,6,7,8}
– p.e., Derecha va a {2,4,6,8}.
Soluciones?
Contingencia
– inicio en #5
– p.e. Aspirar puede ensuciar
alfombra limpia (Murphy)
– hay dos sensores: mugre y
ubicación. Soluciones? Estados meta

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
18 de 94
Búsqueda no informada
Problemas de juguete
Ejemplo - el juego de las 8 fichas
Estados?
Operadores?
Test de Meta?
Costo de Ruta?

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
19 de 94
Búsqueda no informada
Problemas del mundo real
RUMANIA - trayectoria óptima
viajante de comercio - viajes turísticos
circuitos integrados
robot ambulante
robots en ensambles complejos

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
20 de 94
Búsqueda no informada
Problemas del mundo real
Ejemplo - Rumania
Formular
– Situación inicial
– De vacaciones en Rumania, hoy en Arad
• (Estado inicial: Arad)
– El vuelo de vuelta parte mañana de Bucarest
• Meta Estar en Bucarest antes del vuelo
• (Estado Meta: Bucarest)
– Problema
• estados (macroestados): varias ciudades
• operadores: trayectos entre ciudades
Buscar
– Solución a la secuencia “óptima” de ciudades
– Solución a salir del estado inicial y llegar al estado meta
Ejecutar (vector de entrada)(operador ópt acum.) = (vector de salida)
Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
21 de 94
Búsqueda no informada
Problemas del mundo real
Ejemplo (Rumania)

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
22 de 94
Búsqueda no informada
Búsqueda de soluciones

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
23 de 94
Búsqueda no informada
Medición de buen éxito en la
solución del problema
Factores:
– Completitud.
– Optimización.
– Complejidad en tiempo.
– Complejidad en espacio.
– Factor de ramificación.
– Costo de la búsqueda.
– Coste total.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
24 de 94
Búsqueda no informada
Formulación: probl. de estado único Un PROBLEMA se define con cuatro variables:
estado inicial
– p.ej., ``en Arad''
operadores (o tambien función sucesores S(x))
– p.ej., Arad Zerind Arad Sibiu
test de meta, ya sea
– explicito, p.ej., x = ``en Bucharest''
– implícito, p.ej., NoMugre(x)
costo del trayecto (aditivo)
– p.ej. Suma de distancias, número operadores usados, etc.
Una SOLUCION es una secuencia de operadores que traduce el estado inicial
en estado meta

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
25 de 94
Búsqueda no informada
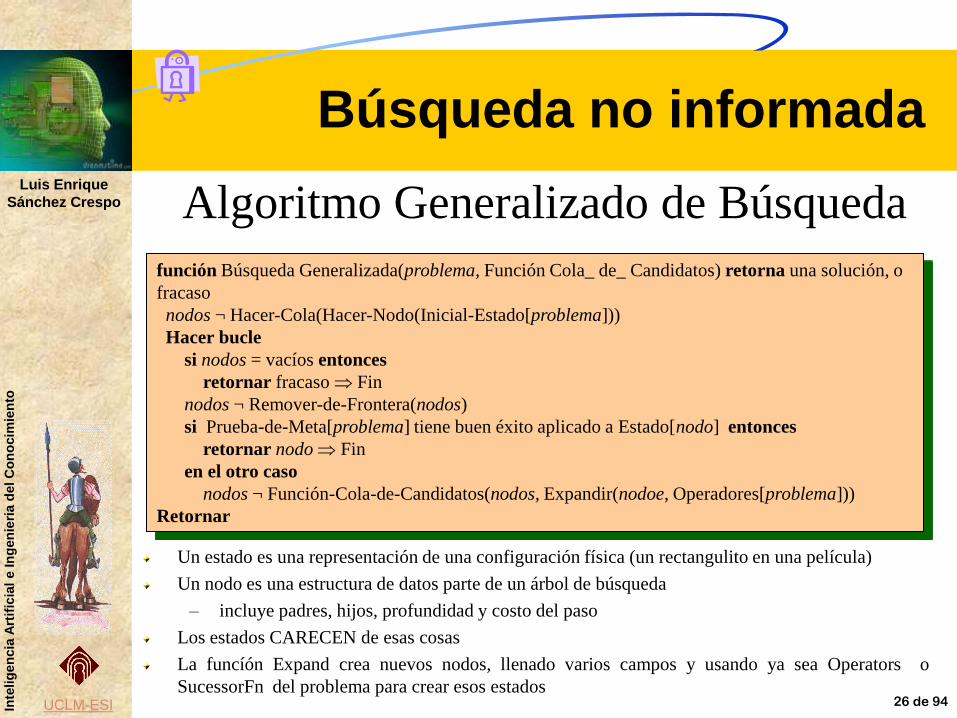
Algoritmo Generalizado de Búsqueda Idea Básica:
– Fuera del mundo real, simular una exploración del espacio de
estados...
– ...generando sucesores de los estados ya explorados (a eso se le
llama EXPANDIR estados)
función Búsqueda Generalizada(problema, estrategia) retorna solución o fracaso
inicializar el árbol de búsqueda usando el estado inicial del problema
si no hay candidatos en la cola_de_candidatos a expandir entonces
retornar fracaso Fin
elegir un nodo hoja para expandir siguiendo una dada estrategia
si el nodo contiene un estado meta entonces
retornar la solución correspondiente Fin
en el otro caso
expandir el nodo y
añadir los nodos resultantes a la cola_de_candidatos
retornar
Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
26 de 94
Búsqueda no informada
función Búsqueda Generalizada(problema, Función Cola_ de_ Candidatos) retorna una solución, o
fracaso
nodos ¬ Hacer-Cola(Hacer-Nodo(Inicial-Estado[problema]))
Hacer bucle
si nodos = vacíos entonces
retornar fracaso Fin
nodos ¬ Remover-de-Frontera(nodos)
si Prueba-de-Meta[problema] tiene buen éxito aplicado a Estado[nodo] entonces
retornar nodo Fin
en el otro caso
nodos ¬ Función-Cola-de-Candidatos(nodos, Expandir(nodoe, Operadores[problema]))
Retornar
Algoritmo Generalizado de Búsqueda
Un estado es una representación de una configuración física (un rectangulito en una película)
Un nodo es una estructura de datos parte de un árbol de búsqueda
– incluye padres, hijos, profundidad y costo del paso
Los estados CARECEN de esas cosas
La funcíón Expand crea nuevos nodos, llenado varios campos y usando ya sea Operators o
SucessorFn del problema para crear esos estados

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
27 de 94
Búsqueda no informada
Frontera en una búsqueda Las diferentes estrategias modifican la frontera y la cola de
candidatos

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
28 de 94
Búsqueda no informada
5 4
6 1 8
7 3 2
5 4
6 1 8
7 3 2
5 4 8
6 1
7 3 2
5 4
6 1 8
7 3 2
5 1 4
6 8
7 3 2
5 4 8
6 1
7 3 2
5 4 8
6 1 2
7 3
6 5 4
1 8
7 3 2
5 1 4
6 8
7 3 2
5 1 4
6 8
7 3 2
5 1 4
6 3 8
7 2
5 8
6 4 1
7 3 2
5 4 8
6 3 1
7 2
5 4 8
6 1
7 3 2
5 4 8
6 1 2
7 3
6 5 4
1 8
7 3 2
6 5 4
7 1 8
3 2
1 4
5 6 8
7 3 2
5 1 4
7 6 8
3 2 . . .
Espacio de búsqueda parcial suprimiendo repetidos

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
29 de 94
Búsqueda no informada
Estrategias de búsqueda no
informada

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
30 de 94
Búsqueda no informada
Estrategias de búsqueda Una estrategia
cuál es el ORDEN EN LA EXPANSION DE NODOS
dónde se insertan los nodos expandidos en la lista o cola
distinta forma de expandir la FRONTERA
Dimensiones de las estrategias:
– Completitud encuentra o nó una solución siendo que existe?
– Complejidad temporal número de nodos generados/expandidos
– Complejidad espacial máximo número de nodos en memoria
– Optimalidad encuentra o nó una solución de mínimo costo?
¡RECORDAR! Las complejidades temporal y espacial se miden usando:
– b - factor de ramificación del árbol de búsqueda
– d - profundidad de la solución de mínimo costo
– m - máxima profundidad del espacio de búsqueda.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
31 de 94
Búsqueda no informada
Fronteras y algoritmo genérico
Tenemos un gráfico, nodos de inicio y nodos meta
exploremos trayectorias
Mantengamos una frontera de nodos -desde el nodo de
partida- que se hayan explorado
Seguimos con la búsqueda expandamos la frontera hasta
llegar a la meta.
La forma de expandir la frontera define la estrategia de
búsqueda

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
32 de 94
Búsqueda no informada
Algoritmos de búsqueda básica
(desinformada)
mindless search
Búsqueda primero en anchura
Búsqueda con costo uniforme
Búsqueda en profundidad
Búsqueda en profundidad limitada.
Profundización iterativa
Búsqueda bidireccional

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
33 de 94
Búsqueda no informada
Búsqueda Primero en Anchura
Nivel 0
Nivel 1
Nivel 2
¡Imaginar la forma de la frontera!

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
34 de 94
Búsqueda no informada
Búsqueda Primero en Anchura
Nivel 0
Nivel 1
Nivel 2

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
35 de 94
Búsqueda no informada
Búsqueda Primero en Anchura
Nivel 0
Nivel 1
Nivel 2

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
36 de 94
Búsqueda no informada
Búsqueda Primero en Anchura Expandir “nodo sin expandir” menos profundo.
– = QueuingFN = insertar sucesor al fondo de cola
Arad
Arad
Sibiu Timisoara Zerind

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
37 de 94
Búsqueda no informada
Búsqueda Primero en Anchura
Arad
Sibiu Timisoara Zerind
Oradea Arad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
38 de 94
Búsqueda no informada
Búsqueda Primero en Anchura
Arad
Sibiu Timisoara Zerind
Oradea Fagaras Arad Rimnicu
Vilcea Oradea Arad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
39 de 94
Búsqueda no informada
Búsqueda
Primero en
Anchura
Arad
Sibiu Timisoara Zerind
Oradea
Fagaras Arad
Rimnicu
Vilcea
Oradea
Arad Lugoi
Arad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
40 de 94
Búsqueda no informada
Búsqueda Primero en Anchura 1
2 3 4
5 6 7 8 9 10
11 12 13 14
goal

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
41 de 94
Búsqueda no informada
Juego de 8 fichas
Espacio de búsqueda “total” (BPA con supresor de repetidos)

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
42 de 94
Búsqueda no informada
Búsqueda primero en anchura Complejidad espacial:
– El árbol entero a profundidad d usa bd a nodos de memoria
– Todo termina bien si ya se sabe que hay un nodo meta a profundidad d. En
el otro caso se debe guardar los nodos d+1 a medida que los genera (esto
usa bd+1 nodos de memoria.
Nodos examinados: (suponer árbol de profundidad d con un nodo meta en esa
profundidad)
para b grande es O(bd)
11
2
1
1
1
2
1
b bb b
b
bdd d d
2 2 1
2 1
1b b b b
b
d d d
( )
b b b
b
d d1 3
2 1( )
Número de nodos internos
antes de llegar a la meta
ubicada en profundidad d
Número medio de nodos
examinados en el gráfico
( a la profundidad d)

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
43 de 94
Búsqueda no informada
Búsqueda primero en anchura Es una estrategia en la que se expanda primero el nodo raíz, después
todos los sucesores del nodo raíz a una profundidad en el árbol de
búsqueda antes de expandir cualquier nodo del próximo nivel.
Cola FIFO: Primero en entrar es el primero en salir.
Lecciones:
– Son un problema más grande los requisitos de memoria para la búsqueda
primero en anchura que el tiempo de ejecución.
– Los problemas de búsqueda de complejidad-exponencial no pueden
resolverse por métodos sin información, salvo casos pequeños.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
44 de 94
Búsqueda no informada
Algoritmos de búsqueda básica
(desinformada)
mindless search
Búsqueda en amplitud
Búsqueda con costo uniforme
Búsqueda en profundidad
Búsqueda en profundidad limitada.
Profundización iterativa
Búsqueda bidireccional

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
45 de 94
Búsqueda no informada
Búsqueda de costo uniforme

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
46 de 94
Búsqueda no informada
Búsqueda de costo uniforme Expandir el “nodo sin expandir” con menor costo
Función_embretar_cola = QueuingFN =
= ubicar en cola por creciente costo de ruta (cola con
privilegios)
Arad
Sibiu Timisoara Zerind
75 140 118
<== Zerid, Timisoara, Sibiu <==

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
47 de 94
Búsqueda no informada
Búsqueda de costo uniforme
Arad
Sibiu Timisoara Zerind
75 140 118
Oradea Arad
75+75 71+75
<== Timisoara, Sibiu, Oradea, Arad <==

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
48 de 94
Búsqueda no informada
Búsqueda de costo uniforme
Arad
Sibiu Timisoara Zerind
75 140 118
Oradea Arad
75+75 71+75
Lugoi Arad
118+118 111+118
<== Sibiu, Oradea, Arad, Lugoi, Arad <==

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
49 de 94
Búsqueda no informada
Búsqueda de costo uniforme Completa?
– Sí, mientras b sea finita (similar a búsqueda Primero en Amplitud)
Complejidad temporal?
– Número de nodos con g(n) £ costo de la solución óptima
Complejidad espacial?
– Número de nodos con g(n) £ costo de la solución óptima
Óptima?
– Sí, mientras el costo de ruta no disminuya siguiendo cualquier ruta
– o sea que g(Successor(n)) ³ g(n), para todo n
Qué sucede con operadores con costo negativo?

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
50 de 94
Búsqueda no informada
Búsqueda costo uniforme Expande el nodo n con el camino de costo más pequeño.
BPA = BCU si el coste es la unidad.
Si existen costes 0 ó negativos podemos introducirnos en un bucle infinito.
Será completo y optimo si todos los costes son mayores que 0.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
51 de 94
Búsqueda no informada
Algoritmos de búsqueda básica
(desinformada)
mindless search
Búsqueda en amplitud
Búsqueda con costo uniforme
Búsqueda en profundidad
Profundización iterativa
Búsqueda bidireccional

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
52 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
53 de 94
Búsqueda no informada
Búsqueda primero en profundidad
¡Imaginar la forma de la frontera!

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
54 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
55 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
56 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
57 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
58 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
59 de 94
Búsqueda no informada
Búsqueda primero en profundidad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
60 de 94
Búsqueda no informada
Búsqueda primero en profundidad
Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
61 de 94
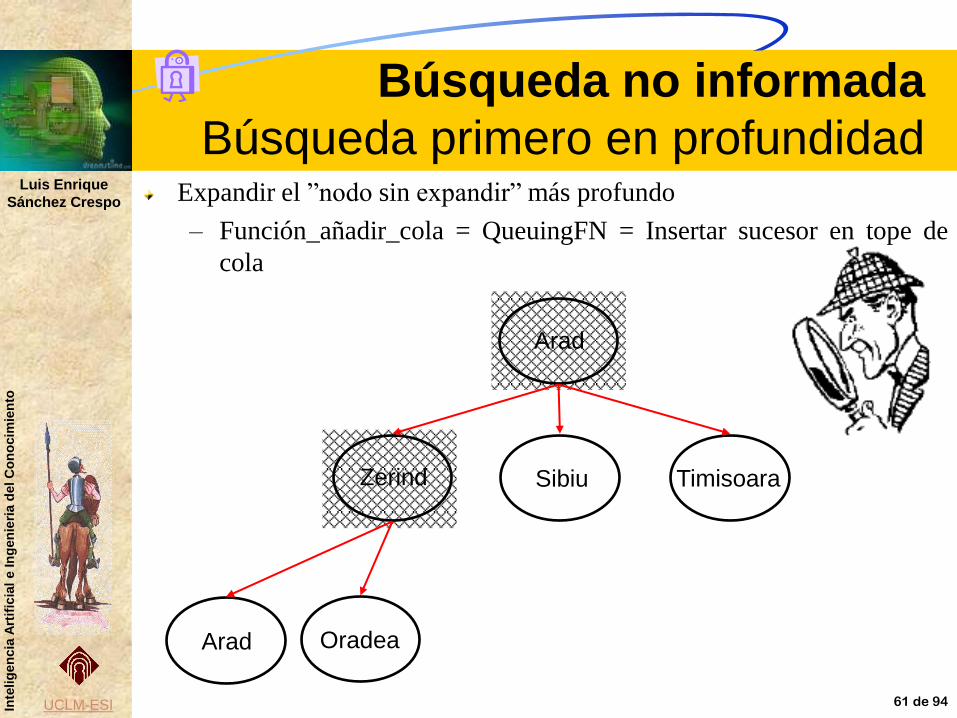
Búsqueda no informada
Búsqueda primero en profundidad Expandir el ”nodo sin expandir” más profundo
– Función_añadir_cola = QueuingFN = Insertar sucesor en tope de
cola
Arad
Sibiu Timisoara Zerind
Oradea Arad

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
62 de 94
Búsqueda no informada
Búsqueda primero en profundidad
Arad
Sibiu Timisoara Zerind
Sibiu Zerind
Oradea Arad
Timisoara
BPP puede incurrir en
excursiones cíclicas
infinitas. Necesita un
espacio de búsqueda que
sea: finito, no-cíclico, o
bien un supresor de
repetidos.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
63 de 94
Búsqueda no informada
Búsqueda primero en profundidad
1
2 8 13
3 7 9 12 14
4 10 11 15
5 6
goal
15 no es 14

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
64 de 94
Búsqueda no informada
Búsqueda primero en profundidad Complejidad espacial (suponer que el árbol tiene una profundidad d con un nodo
meta único a esa profundidad)
– La mayor memoria se consume al llegar al primer punto de profundidad d
– Necesitamos alojar b-1 nodos a cada profundidad (“coetáneos” o siblings del
nodo ya expandido) con un nodo adicional a profundidad d (ya que aún no ha
sido expandido)
– Espacio total = d(b-1) + 1 (este 1 adicional es por la meta a profundidad d)
Nodos examinados: (suponer árbol de valor d con un nodo meta a esa
profundidad)
Mejor caso (la meta está a la extrema izquierda) d +1 nodos
– Peor
– Promedio
– para b grande, equivale a O(bd)
b bd b d
b
d
1 2
2 1( )
11
1
1
b bb
b
dd

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
65 de 94
Búsqueda no informada
Búsqueda primero en profundidad (propiedades)
Completa?
– No; falla en espacio de infinita profundidad o con bucles
– necesita modificaciones en el algoritmo para evitar estados repetidos a lo
largo de trayectorias
Complejidad temporal?
– O(bm): terrible si m es mucho mayor que d
– si las soluciones son densas, BPP es más rápida que Búsqueda Primero en
Amplitud, BPA
Complejidad espacial?
– O(bm) (i.e., espacio lineal)
Óptima?
– No
LIFO
Problema crucial: que m sea mayor que d

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
66 de 94
Búsqueda no informada
Búsqueda primero en profundidad Siempre expande el nodo más profundo en la frontera actual del árbol de
búsqueda.
Al llegar a la frontera, la búsqueda retrocede al siguiente nodo más superficial
que todavía tenga sucesores inexplorados.
Cola LIFO: Último en entrar primero en salir.
Requerimiento de memoria muy bajos.
Inconveniente: Puede hacer una elección equivocada y obtener un camino muy
largo (o infinito).
No es completo.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
67 de 94
Búsqueda no informada
Algoritmos de búsqueda básica
(desinformada)
mindless search
Búsqueda en amplitud
Búsqueda con costo uniforme
Búsqueda en profundidad
Búsqueda en profundidad limitada.
Profundización iterativa
Búsqueda bidireccional

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
68 de 94
Búsqueda no informada
Búsqueda profundidad limitada
Es una busqueda en profundidad, con límite de profundidad l predeterminado.
El limite en profundidad elimina los caminos infinitos.
El sistema no será completo si l < d, es decir que el objetivo esta fuera del
limite de profundidad.
El sistema no será optimo si l > d.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
69 de 94
Búsqueda no informada
Algoritmos de búsqueda básica
(desinformada)
mindless search
Búsqueda en amplitud
Búsqueda con costo uniforme
Búsqueda en profundidad
Búsqueda en profundidad limitada.
Profundización iterativa
Búsqueda bidireccional

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
70 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Búsqueda Primero en Profundidad con límite en
profundidad l
– Nodos a profundidad l sin sucesores
función Búsqueda Profundización Iterativa(problema, Función_embretar_cola)
retorna una secuencia como solución
entrada: problema
para profundidad d 0 a hacer
resultado Búsqueda_Profundidad_Acotada(problema, profundidad)
si resultado está dentro de la cota de corte entonces
retornar resultado (buen éxito)
en el otro caso retornar fracaso

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
71 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
72 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
73 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
74 de 94
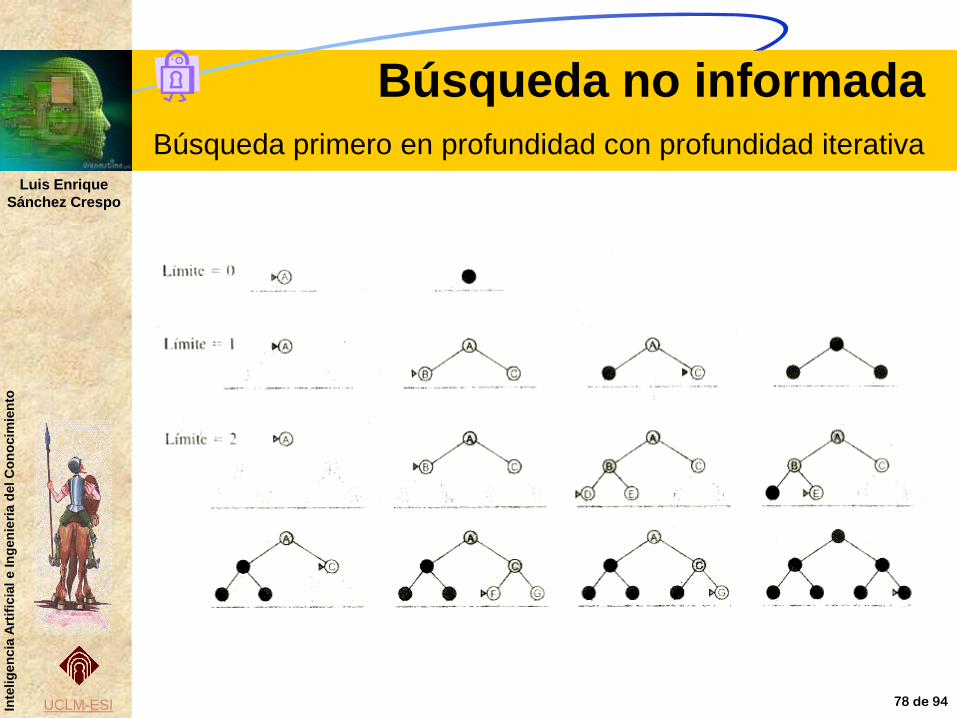
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
75 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Arad
Arad
Sibiu Timisoara Zerind
l = 0
l = 1 etapas 1 y 2

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
76 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Arad
Sibiu Timisoara Zerind
Oradea Arad l = 2 etapas 1, 2 y 3

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
77 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Arad
Sibiu Timisoara
Zerind
Oradea
Fagaras
Arad
Rimnicu
Vilcea
Oradea Arad
Lugoi
Arad
l = 2 etapa 5
Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
78 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
79 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
80 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Ccomplejidad espacial:
– habiendo varias soluciones, si la solución más “optima” se halla a profundidad g -
entonces buscando con BPP hasta dicha profundidad tendrá buen éxito. (Por ello
la Profundización Iterativa retorna a la solución más optima aunque se encamine
antes a otras zonas). La cantidad de memoria de PI es la de BPP.
b bd b d
b
d
1 2
2 1( )
11
1
1
b bb
b
jj
Nº de nodos examinados al final de
búsqueda iterativa l
(igual que en BPA):
Para cada profundidad j = 1, 2, …, d-1, buscar por el árbol
entero
BPP = búsqueda primero en profundidad
PI = profundización iterativa

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
81 de 94
Búsqueda no informada
Completa?
– Sí
Complejidad espacial?
– O(bd)
Complejidad Temporal?
Óptima?
– Sí (mientras el costo de cada paso sea unitario)
En el otro caso (costos diferentes) lleva a explorar en otro tipo de búsqueda, la de
costo uniforme
b b b d b bd b d
b
d d
2 1 2 2
2
4 5 3 2
2 1( )= O(bd)

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
82 de 94
Búsqueda no informada
Búsqueda primero en profundidad con profundidad iterativa
Es una estrategia general, usada a menudo en combinación con la búsqueda
primero en profundidad, la cual encuentra el mejor límite de profundidad.
Se aumenta gradualmente el límite hasta que encontramos un objetivo.
El objetivo se consigue cuando el límite de profundidad alcanza d
(profundidad del nodo objetivo).
Combina las ventajas de la búsqueda primero en profundidad y primero en
anchura.
La profundidad iterativa es el método de búsqueda no informada preferido
cuando hay un espacio grande de búsqueda y no se conoce la profundidad de
la solución.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
83 de 94
Búsqueda no informada
Algoritmos de búsqueda básica
(desinformada)
mindless search
Búsqueda en amplitud.
Búsqueda con costo uniforme.
Búsqueda en profundidad.
Búsqueda en profundidad limitada.
Profundización iterativa.
=> Búsqueda bidireccional.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
84 de 94
Búsqueda no informada
Búsqueda Bidireccional Dos búsquedas simultáneas:
– Una hacia delante desde el estado inicial
– Otra hacia atrás desde el objetivo.
El caso más difícil para la búsqueda bidireccional es cuando el test objetivo da
sólo una descripción implícita de algún conjunto posiblemente grande de
estados objetivo.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
85 de 94
Búsqueda no informada
Búsqueda bidireccional
Estado Final Estado inicial

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
86 de 94
Búsqueda no informada
Evitar estados repetidos

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
87 de 94
Búsqueda no informada
Como evitar estados repetidos
Problemas en los procesos de búsqueda: la
posibilidad de perder tiempo expandiendo
estados que ya han sido visitados y
expandidos.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
88 de 94
Búsqueda no informada
Como evitar estados repetidos
No volver al Estado de su Padre (Estado Parental) -
– Cola con Privilegios (supresores) que excluye a Padres
No volver a Estados de sus Ancestros (Ancestrales) -
– Cola con Privilegios (supresores) que excluye a Ancestros
– Lista negra de suprimidos
No volver a Estados Ya Visitados -
– Cola con Privilegios (supresores) -
– Hacer lista negra de suprimidos (ocupa memoria)
– Balancear los dos costos involucrados
» costo de volver a ramas ya estudiadas
» costo de guardar y usar lista

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
89 de 94
Búsqueda con inf. parcial
Búsqueda con información
parcial

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
90 de 94
Búsqueda con inf. parcial
Conceptos Generales
Problemas sin sensores (problemas conformados):
– Si el agente carece de sensores, debemos partir de que se encuentra en uno
de los estados iniciales.
Problemas de contingencia:
– El entorno es parcialmente observable o las acciones son inciertas, luego
las percepciones del agente proporciona nueva información despues de
cada acción.
Problemas de exploración:
– Cuando se desconocen los estados y las acciones del entorno, el agente
debe actuar para descubrirlos.
– Es un caso extremo de los problemas de contingencia.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
91 de 94
Resumen
Resumen

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
92 de 94
Resumen
En este capitulo se han estudiado ambientes o entornos
deterministas, observables, estáticos y completamente
conocidos, lo que permite al agente construir secuencias de
acciones (búsquedas) que alcanzan sus objetivos.
– Para comenzar la Búsqueda el agente requiere de un Objetivo que se usa
para formular el Problema.
– Un Problema esta formado por: Estado Inicial, Conjunto de acciones,
Función del test objetivo y una función de coste del camino.
– El ENTORNO del Problema se representa por Espacio de Estados.
– Un camino por el Espacio de Estados desde el Estado Inicial a un Estado
Objetivo es una Solución.
– Lo que diferencia a un algoritmo de búsqueda de otro es la Estrategia para
encontrar la Solución.
– Los algoritmos de búsqueda se juzgan sobre: completitud, optimización,
complejidad en tiempo, complejidad en espacio.

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
93 de 94
Resumen
– La Complejidad depende de 2 variables: • b: Factor de ramificación en el espacio de estados.
• d: Profundidad de la solución..
– Búsqueda primero en anchura: selecciona para su expansión el nodo no expandido más superficial en el árbol de búsqueda.
• Es completo.
• Es optimo para costes igual a la unidad.
• La complejidad en espacio lo hace poco útil para la mayor parte de los casos.
– Búsqueda de coste uniforme: Búsqueda primero en anchura, pero expandiendo siempre primero el nodo de menor coste.
• Es completo.
• Es optimo si el coste de cada paso es positivo.
– Búsqueda primero en profundidad: selecciona para la expansión el nodo no expandido más profundo en el árbol de búsqueda.
• No es completo.
• No es optimo.
– Búsqueda de profundidad limitada: búsqueda primero en profundidad con un límite de profundidad fijo..

Luis Enrique
Sánchez Crespo
UCLM-ESI Inte
lig
en
cia
Art
ific
ial
e In
gen
ieri
a d
el C
on
ocim
ien
to
94 de 94
Resumen
– Búsqueda de profundidad iterativa: llama a la búsqueda de profundidad limitada aumentando este limite hasta que se encuentre un objetivo.
• Es completo.
• Es optimo para costes igual a la unidad.
– Búsqueda bidireccional: Búsqueda de solución en dos sentidos. • Si es aplicable reduce la complejidad.
• Requiere mucho espacio.
• Es pocas veces aplicable.
– Eliminación de estados repetidos: cuando trabajamos con grafos es aconsejable, usar mecanismos de poda de estados repetidos.
– Ambientes parcialmente observables: requiere de • Algoritmos de búsquedas en el espacio de estados de creencia.
• Y un plan de contingencia para manejar circunstancias desconocidas.

Universidad de Castilla-La Mancha
Luis Jiménez Linares
Luis Enrique Sánchez Crespo