UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN ... -...
118
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA DIVISIÓN DE ESTUDIOS DE POSGRADO CARACTERIZACIÓN DEL TRÁNSITO VEHICULAR A TRAVÉS DEL PROCESAMIENTO DE INFORMACIÓN DE IMÁGENES DE VIDEO POR FIDENCIO SÁNCHEZ RUEDA TESIS EN OPCIÓN AL GRADO DE DOCTOR EN INGENIERÍA CON ORIENTACIÓN EN INGENIERÍA DE SISTEMAS SAN NICOLÁS DE LOS GARZA, N. L., JULIO DEL 2008
Transcript of UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN ... -...

UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN
FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA
DIVISIÓN DE ESTUDIOS DE POSGRADO
CARACTERIZACIÓN DEL TRÁNSITO VEHICULAR A TRAVÉS DEL
PROCESAMIENTO DE INFORMACIÓN DE IMÁGENES DE VIDEO
POR
FIDENCIO SÁNCHEZ RUEDA
TESIS
EN OPCIÓN AL GRADO DE DOCTOR EN INGENIERÍA CON
ORIENTACIÓN EN INGENIERÍA DE SISTEMAS
SAN NICOLÁS DE LOS GARZA, N. L., JULIO DEL 2008

ii
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN
FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA
DIVISIÓN DE ESTUDIOS DE POSGRADO
CARACTERIZACIÓN DEL TRÁNSITO VEHICULAR A TRAVÉS DEL
PROCESAMIENTO DE INFORMACIÓN DE IMÁGENES DE VIDEO
POR
FIDENCIO SÁNCHEZ RUEDA
TESIS
EN OPCIÓN AL GRADO DE DOCTOR EN INGENIERÍA CON ORIENTACIÓN
EN INGENIERÍA DE SISTEMAS
SAN NICOLÁS DE LOS GARZA, N. L., JULIO DEL 2008

iii
Universidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica y Eléctrica
División de Estudios de Posgrado
Los miembros del Comité de Tesis recomendamos que la tesis
“Caracterización de flujo vehicular a través del procesamiento de información de
imágenes de video”, realizada por el alumno Fidencio Sánchez
Rueda_____________________ con número de matrícula 172533 sea aceptada para
su defensa como opción al grado de Doctor en Ingeniería con Orientación en
Ingeniería de Sistemas.
El Comité de Tesis
_______________________________
Dr. César Emilio Villarreal Rodríguez
Asesor de Tesis
_____________________________ ___________________________
Dra. Ada Margarita Álvarez Socarrás Dr. Arturo Berrones Santos
Revisor Revisor
_____________________________ ___________________________
Dr. Igor S. Litvinchev Dr. Fernando López Irarragorri
Revisor Revisor
________________________________
Dr. Guadalupe Alan Castillo Rodríguez
División de Estudios de Posgrado
Ciudad Universitaria, a 2 de Julio del 2008

DEDICATORIA
Con todo cariño dedico este estudio a todos los que con su apoyo, me impulsaron
a llegar a mi meta por tanto tiempo buscada:
A mis padres (†),
A mis hermanos y mis sobrinos,
A mi esposa y a mis hijos,
A mis maestros,
A mis amigos,
A mis compañeros de trabajo,
A mis compañeros de clase,
A todos los que se interesaron por mis avances…
AGRADECIMIENTOS.
El autor desea dar las gracias a los integrantes del Comité de Tesis, por su
decidido apoyo en la conclusión de este trabajo, así como al equipo de profesores del
Programa de Postgrado en Ingeniería de Sistemas por sus importantes observaciones
en el desarrollo de la tesis; en especial, a la Doctora Elisa Schaeffer pues gracias a su
decidido apoyo y confianza ha sido posible llegar a esta meta, sin olvidar al Dr. César
Villarreal y al Dr. Arturo Berrones, que semana a semana estuvieron al pendiente del
avance del trabajo desarrollado; asimismo expreso mi sincero agradecimiento a la
Universidad Autónoma de Nuevo León y al Consejo Nacional de Tecnología por la
beca concedida para la realización de mis estudios; así como al Sistema Integral del
Transporte Metropolitano (SINTRAM) por sus valiosas aportaciones, al Centro de
Calidad Ambiental y a la Dirección de Informática del ITESM, y a la Preparatoria
número 16 de la UANL. No podría olvidar agradecer a mis padres Porfirio (†) y María
Ruperto (†) y a mis hermanos Fernando (†), María Isabel (†), María del Refugio,
Antonio, María de la Paz, Martha Patricia y particularmente a mi hermana Irma
Guadalupe, quienes en diferentes etapas me apoyaron, impulsaron y motivaron para
salir adelante. Agradezco profundamente a mi esposa Francisca y a mis hijos Daniel
Adrián, Jocksan Alejandro, Gilberto Mario, Juan Arturo y Felipe de Jesús por la
paciencia que han tenido en el transcurso del desarrollo de mis estudios doctorales.
Finalmente, también expreso mi agradecimiento a todos mis compañeros de trabajo así
como a mis amigos, que siempre estuvieron al pendiente de mis estudios en PISIS.
También, deseo expresar mi agradecimiento al Instituto Tecnológico de Nuevo
León por las facilidades otorgadas para la escritura de esta tesis, y al Lic. Virgilio
Mena Becerra, Director de Desarrollo Laboral y Social del grupo FEMSA, por el
apoyo brindado para la culminación de este estudio.
Tampoco podría olvidar expresar mi agradecimiento a Dios por haberme
permitido lograr esta meta que me había propuesto desde hace muchos años y me
brindó la oportunidad y los medios para llegar a ella.

vi
PREFACIO.
Este trabajo es el fruto de una larga etapa de selección de mi tema de tesis, en
la cual estuvieron contemplados cuatro diferentes temas. Cuando inicié en el Programa
de Postgrado en Ingeniería de Sistemas (PISIS) presenté como anteproyecto ''La
elaboración de un método para la optimización del programa de corte de materia
prima'', el cual posteriormente fue descartado debido a que después de algunas
investigaciones se llegó a la conclusión de era un problema muy estudiado y no tenía
mucha área de oportunidad.
Más tarde, empecé a trabajar en la investigación sobre la metaheurística
Búsqueda Dispersa (Scatter Search) en la cual dediqué bastante tiempo haciendo
investigación bibliográfica y de la cual preparé una plática para presentar en clase de
Optimización de Flujo en Redes, logrando un avance considerable en esta dirección.
Después, se me sugirió trabajara en el tema ''Optimización en Tiempo Real'',
ya que se requería para participar en el desarrollo de un proyecto del área de Ingeniería
Eléctrica. Me dediqué a buscar información y encontré que los conceptos que se
manejaban no eran lo suficientemente claros, por lo que cuando me tocó el turno de
presentar una plática del tema en un seminario del PISIS, me pareció una experiencia
desagradable pues creo que no tenía la información necesaria para contestar las
preguntas que se plantearon.
Mi sentir en esos momentos era que realmente no tenía un tema de tesis bien
definido y firme, por lo que me enfoqué a buscar algo que fuera más práctico y
relacionado con los temas y experiencias que anteriormente ya había trabajado. Para
esto me entrevisté con el Dr. César Villarreal, planteándole la problemática en la que
me encontraba y solicitándole su apoyo para sacar adelante mi tema de tesis. Él me
sugirió trabajar en un problema de monitoreo de tránsito de coches en un tramo de
ciertas calles del Área Metropolitana de Monterrey; y yo le propuse agregarle la parte
de contaminación del ambiente, tratando de adaptarla a mi tema de tesis de Maestría.
Así empecé a documentarme en este tema y a empezar a darle forma al proyecto,
estableciendo contacto con el SINTRAM, el Departamento de Protección Ambiental

vii
del Tecnológico de Monterrey, así como otras dependencias del Gobierno del Estado
y la empresa privada SEMEX, encargada del diseño y colocación de los semáforos.
Después, se me invita a participar en un proyecto del Instituto de Ingeniería
Civil que consistía en el conteo de vehículos por trayectoria en una intersección, en el
que accedí a entrar por considerarlo muy relacionado y adecuado para mi proyecto que
en ese momento ya estaba manejando.
Desafortunadamente, encontré que no estaba obteniendo la información que yo
necesitaba para el avance de mi tesis, por lo que determinamos trabajar en forma
independiente, como inicialmente lo habíamos planteado, con el enfoque solo de
desarrollar el algoritmo para la detección de los coches en movimiento, su seguimiento
y su conteo por trayectoria en una intersección, con lo cual se cumpliría con los
objetivos planteados para mi tesis y los del Instituto, por lo cual no había
contraposición, sólo en la forma de trabajar.
De esta manera, y con esta idea preparé la presentación de mi propuesta de
tesis formal al Comité de Tesis, a la cual se le denominó ''Desarrollo de un algoritmo
para procesamiento de información de imágenes para la detección del movimiento de
coches, seguimiento y conteo por trayectorias en una intersección'', del que emanaron
una serie de sugerencias.
Continué con mi preparación para desarrollar el tema, enfocado al estudio de la
Visión Computacional, pues había encontrado que en esta disciplina existían
algoritmos muy adecuados para aplicarlos en la solución de este problema.
Actualmente, me permito manifestar y reafirmar mi mejor intención de lograr
una preparación académica que me permita ofrecer un mejor desempeño en lo
académico y en los proyectos de investigación que se me confieran, para beneficio de
las generaciones actuales y las que están por venir.
Primavera del 2008.

viii
RESUMEN
Fidencio Sánchez Rueda
Candidato a Doctor en Ingeniería con Orientación en Ingeniería de Sistemas
Facultad de Ingeniería Mecánica y Eléctrica
Universidad Autónoma de Nuevo León.
Título del estudio: Caracterización del tránsito vehicular a través del
procesamiento de imágenes de video.
Número de páginas: 118.
Objetivos y métodos de Investigación.
Este estudio se enfoca al análisis de la información obtenida a través de la
observación de imágenes de video de tres puntos seleccionados de avenidas del Área
Metropolitana de Monterrey, para calcular los valores de tres de las variables utilizadas
en el diagrama fundamental de la teoría de tránsito, que relaciona las variables flujo,
densidad y velocidad.
La razón del estudio es la preocupación que surge ante los problemas de tránsito
que enfrenta la ciudad de Monterrey y la idea es a través de esta investigación
identificar relaciones de causa a efecto que proporcionen información para apoyar la
planificación y la toma de decisiones relacionadas con la infraestructura vial.
La metodología utilizada es totalmente manual, pero simultáneamente se
desarrolla un modelo para automatizar la obtención de los valores de nuestras variables
de interés; desafortunadamente, la parte de automatización no se concreta por enfocar
el esfuerzo directamente a la parte manual o visual. Adicionalmente, se desarrolló un
simulador para verificar el funcionamiento del modelo de detección automática.

ix
Los resultados obtenidos en forma manual son procesados y graficados,
efectuando los análisis necesarios para llegar a conclusiones importantes de acuerdo a
los objetivos planteados.
Adicionalmente a la caracterización por medio de las variables flujo, densidad y
velocidad, se introduce otra variable que se ha considerado de gran importancia en el
comportamiento del tránsito vehicular: los cambios de carril.
El análisis efectuado nos conduce a comprobar que efectivamente los cambios de
carril tienen una influencia directa en el tránsito.
Recientemente, varios investigadores han desarrollado diferentes tipos de
modelos en los cuales consideran los cambios de carriles y se encuentran resultados
interesantes.
En nuestra investigación, se calculan los valores de los cambios de carril en los
mismos rangos de tiempo en los que se calculan las tres variables mencionadas, y se
realiza el análisis del comportamiento del tránsito considerando el flujo contra cambios
de carril, densidad contra cambios de carril y velocidad contra cambios de carril,
obteniéndose importantes conclusiones.
Contribuciones y conclusiones.
Este proyecto de investigación tiene una serie de contribuciones de carácter
social, económico, tecnológico, seguridad y científico.
En el aspecto social, por el impacto que tiene en la mejora de la calidad de vida
de los conductores al contar con una vialidad más fluida, pues si bien este proyecto no
conduce directamente a ese logro, sí pretende apoyar las decisiones en ese sentido.
En el aspecto económico, apoyará la toma de decisiones para la inversión de los
recursos públicos en una infraestructura vial más de acuerdo a las necesidades viales.
En el aspecto tecnológico, porque se aplican técnicas modernas de Ciencias
Computacionales, particularmente de visión computacional, en el desarrollo de un
modelo para la detección automatizada de vehículos en movimiento y su conteo.
x
En cuestiones de seguridad, pues la infraestructura generada como
consecuencia de apoyo en la toma de decisiones, será un elemento importante en el
incremento de la seguridad de los conductores y de los peatones, sin contar el apoyo en
el seguimiento a vehículos de interés para las autoridades.
Finalmente, en el aspecto científico se realiza un importante análisis de las
interrelaciones de las variables clásicas de la teoría de tránsito con una nueva variable
que representa los cambios de carriles y que según la literatura no ha sido
suficientemente estudiada, lográndose conclusiones importantes.
Por otro lado, es importante también señalar que se está aportando el diseño de
un modelo automatizado para el análisis de los videos y un simulador de tránsito, éste
último desarrollado por la Doctora Elisa Schaeffer en Java.
FIRMA DEL ASESOR: _______________________________________
Dr. César Emilio Villarreal Rodríguez.

xi
Indice
PREFACIO................................................................................................................. vi
RESUMEN ............................................................................................................... viii Objetivos y métodos de Investigación............................................................................................. viii Contribuciones y conclusiones. ..........................................................................................................ix
CAPÍTULO 1 ............................................................................................................... 1
INTRODUCCIÓN ....................................................................................................... 1
1.1 Objetivos del proyecto...................................................................................................1
1.2 Hipótesis..........................................................................................................................4
1.3 Justificación. ...................................................................................................................4
1.4 Metodología. ...................................................................................................................5
1.5 Contribución...................................................................................................................6
1.6 Estructura de la tesis. ....................................................................................................7
CAPÍTULO 2 ............................................................................................................... 9
ANTECEDENTES GENERALES.............................................................................. 9
2.1 Visión Computacional. ..................................................................................................9 2.1.1 Origen.....................................................................................................................................9
2.1.2 Dispositivos de adquisición de imágenes. ................................................................................12 2.1.3 Elementos de un sistema de procesamiento de imágenes. .......................................................14
2.2 Geometría de imágenes. ..............................................................................................16 2.2.1 Importancia de la perspectiva en el procesamiento de imágenes. ...........................................16 2.2.2 Tipos de perspectiva..................................................................................................................16
2.3 Métodos de procesamiento de imágenes. ..................................................................19 2.3.1 Representación digital de la imagen.........................................................................................20 2.3.2 Almacenamiento de imágenes. .................................................................................................20 2.3.3 Restauración y mejora de imágenes .........................................................................................23 2.3.4 Segmentación. ...........................................................................................................................26
2.3.4.1 Métodos de segmentación.................................................................................................28 2.3.5 Sustracción de Fondo................................................................................................................34 2.3.6 Distintos tipos de transformadas aplicadas a imágenes. ..........................................................38 2.3.7 Transformada de Hough. ..........................................................................................................39
2.4 Teoría de tránsito.........................................................................................................42 2.4.1 Antecedentes. ............................................................................................................................42
2.4.2 Modelos de Tránsito. ....................................................................................................42
CAPÍTULO 3 ............................................................................................................. 46
DETECCIÓN Y CONTEO DE CAMBIOS DE CARRILES. ................................... 46
3.1 Antecedentes del problema.........................................................................................46
3.2 Trabajo Relacionado. ..................................................................................................46

xii
3.3 Justificación. .................................................................................................................48
3.4 Solución Propuesta. .....................................................................................................49 3.4.1 Condiciones del entorno de los videos. ....................................................................................49 3.4.2 Detección de coches en movimiento. .......................................................................................49 3.4.3 Descripción de la solución propuesta. ......................................................................................50
CAPÍTULO 4 ............................................................................................................. 53
EXPERIMENTOS..................................................................................................... 53
4.1 Análisis por conteo manual. .......................................................................................53 4.1.1 Resultados del análisis del tramo de Constitución a la altura de Gonzalitos, dirección Puente Atirantado a Monterrey. .....................................................................................................................54 4.1.2 Análisis del Tramo Constitución-Venustiano Carranza a la altura de la Loma Larga............63 4.1.3 Análisis de la avenida José Eleuterio González(Gonzalitos)...................................................67
CAPÍTULO 5 ............................................................................................................. 74
CONCLUSIONES. .................................................................................................... 74
5.1 Resultados.....................................................................................................................74
5.2 Trabajo futuro. ............................................................................................................75
APÉNDICE A.- SINTRAM....................................................................................... 77
APÉNDICE B. Código .............................................................................................. 82
APENDICE C. Herramientas.................................................................................... 87
C.1 Herramientas de procesamiento de las secuencias de imágenes. ..............................87
C.2 Conceptos clave del conjunto de bloques.....................................................................89
APÉNDICE D.- Modelo. ........................................................................................... 95
GLOSARIO ............................................................................................................... 98
BIBLIOGRAFÍA ..................................................................................................... 100
FICHA AUTOBIOGRÁFICA................................................................................. 106

1
CAPÍTULO 1
INTRODUCCIÓN 1.1 Objetivos del proyecto.
El campo del tratamiento digital de imágenes es, sin duda, un tema muy
interesante que ha sido estudiado y trabajado desde hace mucho tiempo, por lo cual ha
merecido un avance considerable en este campo y las disciplinas relacionadas. En la
actualidad el acceso a las imágenes digitales y a las imágenes por computadora, ha
traído como consecuencia un gran crecimiento, de tal forma que, actualmente es
relativamente fácil tener acceso a las herramientas necesarias, tanto de hardware como
de software, para trabajar con las imágenes cosa que hace unos años no era tan
alcanzable.
En la presente investigación se aplican algunas de las técnicas del tratamiento
digital de imágenes, en el diseño de soluciones al problema que se está planteando.
Las grandes ciudades enfrentan diferentes tipos de problemas debido
esencialmente a la gran cantidad de habitantes que poseen. Uno de ellos es
precisamente el control del tránsito de vehículos en los diferentes sectores que
conforman el área urbana y suburbana.
Diariamente aparecen en los medios de comunicación, ya sean prensa, radio o
televisión, que en tal o cual parte de la ciudad hay mucho congestionamiento y que se
recomienda tomar rutas alternas para evitar esa parte donde hay amontonamiento de
vehículos por diferentes circunstancias. Particularmente, la radio y la televisión aportan
un excelente apoyo en el esfuerzo que se realiza para controlar eficientemente el
tránsito buscando las consecuencias mínimas al informar en tiempo real la situación
del tránsito en las diferentes avenidas.
Sin embargo, observamos que existen muchas áreas de oportunidad en este
sentido, empezando por la educación de los conductores.

2
El crecimiento del parque vehicular ha sido consecuencia natural del
crecimiento demográfico y de la complejidad de las actividades humanas.
En el área metropolitana de la ciudad de Monterrey el problema del tránsito se
torna aún más fuerte por su tamaño y la cantidad de vehículos que la conforman, esto
sin contar con otros problemas de contaminación y la serie de problemas de salud que
ésta trae consigo.
A nivel mundial, el 86% de los vehículos se localizan en ciudades
industrializadas [36]. En 1994, 43 áreas urbanas tenían más de un millón de habitantes.
En 2010, se estiman 52 áreas urbanas con más de un millón. En 1950, había 53
millones de vehículos, mientras que en 1990, se estimaron 430 millones lo cual
significa un crecimiento aproximado del 800%.
En lo que se refiere a la población del Área Metropolitana de Monterrey, en
1990 era de 2´627,000 y 3´426,000 al final de esa década, como se muestra en la
gráfica 1.
2,627,000
3,426,000
4,000,000
0
500000
1000000
1500000
2000000
2500000
3000000
3500000
4000000
4500000
1990 1999 2008
Población
Gráfica 1. Crecimiento de la población de Monterrey
En el año 2003 la flota de vehículos en el Área Metropolitana de Monterrey era
de 1´121,333 vehículos, entre privados, transporte público y vehículos foráneos
registrados en el estado; incluía 200,000 vehículos legalizados entre 2001 y 2002.

3
La flota actual tiene un alto porcentaje de vehículos viejos. Se estima que
200,000 vehículos viejos procedentes de EE. UU. fueron introducidos entre el año
2000 y 2001, cuyas condiciones mecánicas se desconocen.
La grafica 2 muestra el número de vehículos en la ciudad de Monterrey y su área
metropolitana en los años 2003 y 2006
Vehículos
1,121,333
1,400,000
0
200000
400000
600000
800000
1000000
1200000
1400000
1600000
2003 2006
Figura 2. Número de vehículos en los años 2003 y 2006
En este proyecto nos vamos a limitar a estudiar el problema del tránsito
vehicular, ya que consideramos que este problema se ha vuelto cada vez más crítico a
medida que núcleos urbanos han ido creciendo y es necesario contar con modelos de
control de tránsito vehicular más eficientes, además de que es un problema complejo
en el cual intervienen muchas variables, para lo cual es conveniente efectuar un
análisis cuidadoso y que en un momento dado se puedan contar con soluciones
óptimas al control de tránsito vehicular.
Generalmente los problemas de tránsito son generados por factores relacionados
con la forma de manejar del automovilista debido a diferentes hechos tales como prisa
por llegar tarde a su destino, generalmente a los centros de trabajo, cambios repentinos
de carril, manejo a exceso velocidad o a velocidad muy lenta en bulevares de cierta
velocidad máxima, falta de experiencia y precaución al manejar, todo esto ocasionando
accidentes de tránsito o altas probabilidades de que ocurran por el congestionamiento

4
de los mismos, molestias a los automovilistas por sus retrasos, por estar esperando o
por la lentitud en el avance.
1.2 Hipótesis.
Este análisis está fundamentado en la hipótesis de que los problemas de
tránsito vehicular se deben principalmente a los estilos de manejo y conductas de los
conductores [16], principalmente al momento de decidir modificar sus rutas cuando
van en plena vía de alta velocidad, o incluso en vías de velocidad normal, lo cual trae
como consecuencia que en forma repentina traten de cambiar de carril, provocando
también cambios de velocidad repentinos de los automovilistas que están cerca. En
vías de alta velocidad esto provoca una rápida congestión de vehículos precisamente
debido a la velocidad que traen y hacen que rápidamente se vayan amontonando
coches en la zona donde se está produciendo este evento de cambio de carril;
adicionalmente a esto hay un incremento en la probabilidad de un accidente, choque,
entre los vehículos involucrados ya sea al atravesarse repentinamente en la trayectoria
de los vehículos que circulan en el carril a donde se desean pasar o bien por alcance
entre los coches de diferentes carriles.
Por otro lado, es conveniente analizar el comportamiento del tránsito vehicular
en función de la teoría del tránsito vehicular [16,17, 27] , para saber las interrelaciones
entre ellas y como influyen en dicho comportamiento, de tal manera que sea posible
determinar en una forma realista un plan de desarrollo de la infraestructura urbana de
avenidas, puentes, pasos a desnivel, semaforización y en general todos los aspectos
relacionados con el tránsito de vehículos, de tal manera que las autoridades
responsables de su administración puedan contar con una herramienta que les facilite
la toma de decisiones.
Uno de los objetivos principales de nuestro estudio es investigar los cambios de
carril ya que es otra de las variables que deben ser consideradas en el comportamiento
del tránsito vehicular, pues hay una relación directa con las variables que intervienen,
como son el flujo, la densidad y la velocidad.
1.3 Justificación.

5
Es importante contar con una metodología mediante la cual sea posible
obtener la información de las variables que caracterizan el tránsito vehicular tanto en
forma manual como automática, de manera que se puedan estimar los parámetros que
se utilizan en los modelos que se diseñan para la caracterización del tránsito vehicular.
De acuerdo a la hipótesis planteada, esta investigación está enfocada al
análisis y caracterización del movimiento de los vehículos en una vía, en la que como
se explicó anteriormente, los estilos y conductas de los choferes provocan problemas
de distinta índole, principalmente debido a los cambios repentinos de carril, obligando
a los otros conductores a frenar también repentinamente y generando los
congestionamientos y la mayoría de las veces accidentes que pueden ser fatales.
1.4 Metodología.
La metodología que se presenta tiene dos etapas fundamentales; la primera, está
enfocada a la obtención en forma manual de la información de los valores promedio de
las variables que describen el comportamiento del tránsito vehicular, a través del
análisis y observación directamente de los videos, de tal manera que faciliten el
análisis del mismo, así como su interpretación con el apoyo de la información
recopilada y analizada, la cual posteriormente es comparada con la que se obtiene del
modelo de detección automática.
Esta metodología está basada en el procesamiento de las imágenes obtenidas por
medio de las cámaras de monitoreo vial del SINTRAM, dependencia oficial del
gobierno del Estado de Nuevo León, encargada del monitoreo y operación del Sistema
de Transporte en el Área de Monterrey, así como de otras grabaciones realizadas en
forma independiente.
En la segunda etapa, las imágenes obtenidas de las cámaras son convertidas a
formato digital para procesarse en la computadora, donde sirven de entrada a las
funciones de MATLAB, un lenguaje de programación de tipo científico cuyos
elementos esenciales son matrices (MATrix LABoratory) y que cuenta con una serie
de módulos orientados a diferentes aplicaciones científicas y de ingeniería. Entre los
módulos de Matlab se cuenta SIMULINK, una herramienta para el desarrollo de

6
modelos de simulación, el cual será utilizado para el procesamiento de las secuencias
de imágenes.
El análisis realizado se centra en una de las vías de mayor tránsito como es el
boulevard Constitución, por considerarse más representativo del problema que nos
ocupa, sin embargo, la aplicación de esta metodología es posible en cualquier avenida,
así como la aplicación del modelo de detección automática, una vez realizados los
ajustes de los parámetros en forma adecuada.
1.5 Contribución.
El desarrollo de esta investigación contribuye en los diferentes aspectos:
a).- Social.
- Proporcionará información que apoyará la toma de decisiones sobre la
construcción de complejos viales, lo cual ayudará en la agilización del tránsito y
consecuentemente el ciudadano llegará más rápido a su destino.
- Al contar con información del flujo vial en forma automatizada y confiable,
apoyará en el diseño de las redes viales, logrando un tránsito vehicular más fluido.
b).- Económico.
- Al proporcionar la información del flujo vehicular en los diferentes puntos
donde se aplique la metodología, apoyará los procesos de planeación de la
infraestructura vial y facilitará la toma de decisiones sobre las inversiones en la
construcción de complejos viales, puentes peatonales, instalación de semáforos.
c).- Tecnológico.
- Dada la necesidad de contar con procedimientos automatizados, surge la
necesidad de la aplicación de tecnología de vanguardia en el monitoreo vehicular, al
emplear herramientas y dispositivos electrónicos que capturan información de
imágenes, las convierten a forma digital, las transmiten, almacenan, procesan, facilitan
la toma de decisiones y determinar señales de ajuste y control en los semáforos, y al
apoyar a los responsables del sistema de transporte para alertar a los conductores.

7
d).- Seguridad.
La información proporcionada por este sistema facilitará a los responsables la
implementación de mecanismos, tales como recomendaciones confiables a través de
los medios de comunicación, diseño y aplicación de planes de contingencia, que
ayuden a minimizar los accidentes viales e incrementar las seguridad vial en las
diferentes vías del área metropolitana de Monterrey.
d) Científico.
- Desde el punto de vista científico, la contribución es que se contará con un
algoritmo en el que se utilizan técnicas de visión computacional, que efectúa la
detección vehículos en movimiento, permita caracterizar el movimiento de los
vehículos a través de las variables flujo, densidad y velocidad, así como el análisis de
los cambios de carril y sus consecuencias.
- Permite contar con una herramienta, mediante la cual se obtendrán las variables
uqe describen el comportamiento del tránsito vehicular, con lo cual permitirá y
facilitará el análisis de su comportamiento en las diferentes avenidas e intersecciones
del Área Metropolitana de Monterrey.
1.6 Estructura de la tesis.
Este documento de tesis está estructurado de la siguiente manera: en este
capítulo se describe cual son los objetivos y la motivación para su desarrollo, así como
su contribución e impacto; en el capítulo dos se hace una revisión del marco teórico en
el que se fundamenta la investigación y el desarrollo del proyecto; se describen las
distintas metodologías y algoritmos utilizados en la implementación de la solución; en
el capítulo tres se hace una descripción del problema de detección y conteo de los
cambios de carriles en carretera, dando una explicación resumida de sus antecedentes
los cuales ya fueron descritos en el capítulo uno; también se hace una revisión de los
trabajos desarrollados y relacionados con el problema que nos ocupa.; en el capítulo
cuatro se describen los distintos procesos desarrollados para llegar a la solución del
problema y se presentan los resultados encontrados; en el capítulo cinco se presentan
las conclusiones de la investigación, haciéndose una evaluación de la solución donde

8
se mencionan los hallazgos en cada experimento realizado, así como un comparativo
con los resultados obtenidos.
Adicionalmente, se establecen las áreas de oportunidad detectadas para el
trabajo futuro, así como recomendaciones para los interesados en continuar
investigando sobre este tema.
9
CAPÍTULO 2
ANTECEDENTES GENERALES. 2.1 Visión Computacional.
Una herramienta muy importante para el desarrollo de proyectos de
automatización de análisis de escenas a través de secuencias de videos es la visión
computacional [49]. En este capítulo se presentan los conceptos más importantes de
esta importante rama del conocimiento, lo cual es básico para el desarrollo del
proyecto de investigación.
2.1.1 Origen.
Existen en la literatura muchas definiciones de Visión Computacional, también
llamada visión de máquina y visión artificial.
El objetivo de la visión computacional [10,43] es obtener las imágenes del
mundo, realizar un proceso de identificación y reconocimiento y tomar las decisiones y
acciones adecuadas a la situación particular que se presenta.
De acuerdo con esto, se pretende realizar las mismas funciones que realiza la
visión humana: a través del ojo recibe las imágenes, las procesa a través de la retina,
las envía al nervio óptico y éste las envía al cerebro, quien finalmente identifica el
objeto u objetos que conforman la imagen e interpreta su significado y toma las
decisiones necesarias en su caso.
La diferencia entre las dos formas es obvia: El sistema de visión humano consta
de millones de elementos, los llamados conos y bastones, que son los que se encargan
de procesar la información de las imágenes que reciben del mundo exterior y envían al
cerebro las señales correspondientes a través del nervio óptico.

10
Esta diferencia por supuesto, es producto de la evolución de la especie humana
desde su aparición sobre la tierra, por lo que va a ser un esfuerzo considerable y de más
largo plazo para poder siquiera acercarse un poco a su capacidad de visión en forma
artificial.
Aún así, y a pesar de la extraordinaria capacidad, no debemos pasar por alto que
nuestro sistema de visión humano no está exento de fallas, como se muestra en muchos
ejemplos, algunos de los cuales se observan en la figura 2.1.
a) b)
Figura 2.1.- La visión humana [4], no es infalible como se puede observar en estos ejemplos.
<>
><
<>
><
a) La espiral de Frasier. Lo que parece una espiral son círculos concéntricos; en b) el rostro de una joven y el de una anciana.
c) Dos segmentos de línea de longitud diferente, ideado por Franz Müller-Lyer en 1889.
d) Cuadrado con lados aparentemente distorsionados.

11
Así como estos existen muchos otros ejemplos de ilusiones ópticas debido a la
tendencia del cerebro de seguir ciertos patrones, lo cual lo lleva a interpretar imágenes
en forma errónea.
El surgimiento de la visión artificial tiene lugar a partir de los estudios de D.
Marr [32], que redefine y revitaliza el estudio de la visión humana y de máquina. Marr
en su propuesta presentó una metodología para el procesamiento de la información de
la imagen que se percibe. Esta metodología consta de tres niveles que son los
siguientes:
El Nivel ,2D llamado también esbozo primitivo, es una estructura que distingue
los rasgos básicos presentes en la imagen (bordes, líneas, arcos, manchas).
El Nivel ,2
12 D consiste de la construcción de las superficies que forman parte
de la imagen vista por el observador, utilizando la información proporcionada por el
esbozo primitivo y la información tridimensional estereoscópica, sombreado,
reflectancia, iluminación.
El Nivel ,3D es la construcción del modelo para representar los objetos en el
espacio, lo cual permitirá clasificarlos y compararlos con información previamente
almacenada.
Tenenbaum y Barrow (1976) presentaron una propuesta similar donde
consideraron modelos en los que el proceso de transformación de la información está
definido por un ciclo en el que intervienen los datos observados y un proceso dirigido
por la información ya conocida tratando de ajustar las observaciones a esta
información.
Un punto de interés en el terreno de la investigación se refiere a la forma en la
cual la información pasa del más bajo nivel (donde no hay carga semántica) al nivel
más alto (alta carga semántica) o sea, es necesario definir cuál es el proceso para pasar
la información medida a información simbólica con un alto nivel semántico.

12
Sobre este último punto, ha habido estudios recientes y propuestas sobre como
podría realizarse este proceso, en particular los trabajos de Terzopoulos (1983,1988) y
Blake y Zisserman (1987) sobre construcción de superficies y otros basados en
modelos de segmentación que utilizan campos aleatorios markovianos.
Los trabajos desarrollados a partir de las teorías de Marr y sus colaboradores, ha
dado origen a esta nueva especialidad que se denomina Visión Computacional, la cual
trata de explicar los mecanismos de cálculo de la visión humana mediante
procedimientos y métodos de la teoría matemáticas de procesamiento de información.
Dado lo anterior, podemos considerar la visión computacionalcomo una
disciplina con mucho potencial de desarrollo y con posibilidades muy diversas, ya que
por supuesto los problemas de visión computacional son de diferente índole y por lo
tanto se han diseñado muchos métodos diferentes para resolver los problemas que se
han ido presentando para resolver cuestiones muy particulares. Estas mismas
metodologías desarrolladas han servido como base para resolver otros problemas y así
sucesivamente.
2.1.2 Dispositivos de adquisición de imágenes.
Existen diferentes tipos de dispositivos de captación de imágenes; algunos están
equipados con lentes y otros no. Los primeros modelos de la cámara obscura inventada
en el siglo 16 no tenían lentes, pero en su lugar constaba de un hoyo para enfocar los
rayos de luz en una pared o placa transparente para demostrar las leyes de perspectiva
descubiertas un siglo antes por Brunelleschi. Posteriormente los hoyos fueron
remplazados por lentes cada vez más sofisticados, la cámara fotográfica moderna o
digital es esencialmente una cámara obscura con la capacidad de registrar la cantidad
de luz que incide en el área de su plano posterior.
Cámaras CCD.
La cámara CCD (Charge Coupled Device) es un sensor de imagen que utiliza
elementos semiconductores fotosensibles en forma de arreglos matriciales, en el cual
los receptores activos de este arreglo son distribuidos en píxeles individuales. En un
sensor CCD se transforma le energía de la luz incidente en energía eléctrica. La carga

13
eléctrica almacenada en la celda posteriormente se transporta mediante un registro
de desplazamiento (shift register) para conformar una señal de video. En las cámaras
CCD se discretiza la imagen en pixeles, sin embargo el valor de la carga eléctrica
almacenada en cada celda no se digitaliza en el arreglo CCD sino en una conversión
posterior realizada por un convertidor análogo-digital.
Las cámaras CCD son consideradas como dispositivos que poseen una muy baja
deformación geométrica de la imagen, una muy buena sensibilidad a la luz y una muy
buena resolución, llegando típicamente a los 400,000 pixeles. El tiempo de captura de
la imagen es típicamente en el rango de 1/60 s y 1/10000 s.
La formación geométrica de la imagen se considera como una transformación de
las coordenadas yx, en un nuevo sistema de coordenadas vu, .Para esta
transformación se consideran básicamente cuatro aspectos:
1.- Cambio de escala: Las coordenadas de una imagen están expresadas en
unidades métricas distintas a las utilizadas en el mundo real. Generalmente la imagen
se expresa en pixeles y el espacio 3D en milímetros, por lo que es necesario utilizar un
factor de escala, además, dado que los píxeles no son cuadrados sino rectangulares, el
factor de escala es distinto para cada eje de la imagen. Los factores de escala son
expresado en pixeles/Mm.
2.- Traslación del origen. Se introducen las variables ),( 00 yx para denotar el
punto principal de la imagen en el nuevo sistema de coordenadas, es decir
00 , vvuu == corresponden al punto 0,0 == yx .
3.- Rotación de los ejes. Los ejes yx, y los ejes vu, no tienen la misma
orientación. En la modelación de la cámara existen dos métodos: uno que considera un
ángulo θ de rotación y otro que asume que este ángulo es cero y que el ajuste debe
hacerse en los ejes X, Y, Z del sistema de coordenadas 3D. En este segundo método el
eje Z sigue siendo el eje óptico de la proyección y los ejes yx, siguen siendo paralelos
a los ejes X, Y; sin embargo se hace coincidir, mediante una rotación del eje Z, la
orientación de los ejes yx, con los ejes vu, .

14
4.- Factor de torcimiento. En muchos casos, los ejes vu, no son ortogonales
debido a que los pixeles en los arreglos no son rectangulares. En este caso es necesario
introducir al modelo de la cámara un factor de torcimiento (inglés: skew factor) s . En
la mayoría de las cámaras s es cero.
Resumiendo los cuatro aspectos enunciados previamente y tomando en cuenta
que la orientación de vu, y yx, es la misma, tenemos que la transformación de
coordenadas quedaría definida por la siguiente ecuación matricial:
=
1100
0
10
0
y
x
v
us
v
u
y
x
α
α
(2.1)
O bien,
Kmw = (2.2)
con [ ] [ ]TTyxmvuw 1,1 == y K es la matriz 3x3 en la ecuación 2.1 y es
conocida como la matriz de calibración de la cámara.
2.1.3 Elementos de un sistema de procesamiento de imágenes.
En la figura 2.2 se muestran los elementos que constituyen un sistema de
procesamiento de imágenes [41], los cuales se describen a continuación.
Adquisición de imágenes. Esta primera etapa requiere un sensor y la posibilidad
de digitalizar la imagen adquirida por el sensor. El sensor puede ser una cámara de
televisión, a color o monocromática, que provee una imagen del dominio del problema
en cuestión cada cierto intervalo de tiempo, normalmente cada 1/30 de segundo.
También puede ser una cámara de barrido de líneas que produzca una línea de la
imagen.
Preprocesado. Una vez digitalizada la imagen el paso siguiente es el
preprocesado. El objetivo del preprocesado o preprocesamiento es mejorar la imagen
de tal forma que el propósito final tenga una mayor posibilidad de éxito. Utiliza
técnicas que tratan de suprimir el ruido, mejorar el contraste y aislar las regiones que
por sus características nos ayuden a resolver el problema.

15
Segmentación. El objetivo de la segmentación o fragmentación es dividir la
imagen en partes que la constituyen u objetos que la conforman. Se considera uno de
los problemas más difíciles en el procesamiento de imágenes, pues una buena
segmentación nos facilitará la solución del problema de reconocimiento, mientras que
una mala segmentación nos producirá muchas fallas.
Representación y descripción. La salida del proceso de segmentación es una
imagen que contiene la frontera de la región o puntos de la misma. Se requiere
convertir los datos a una forma que sea apropiada para la computadora, por lo que es
necesario decidir si se va a utilizar la información por frontera o por regiones. Esta
decisión depende de la aplicación en particular.
La representación por frontera se utiliza cuando el objetivo se centra en
características de la forma externa como las esquinas o concavidades y convexidades.
La representación por regiones se utiliza cuando el interés es en propiedades
internas como la textura y el esqueleto.
Existen aplicaciones donde podrían utilizarse ambas representaciones. Sin
embargo, la representación es sólo una etapa del proceso de transformación de los
datos de entrada, pues adicionalmente es necesario especificar un método que se
encargue de extraer los datos que son relevantes para el problema en cuestión. La
descripción, llamada también selección de características, se encarga de extraer las
características que proporcionan información de interés o que son básicas para poder
diferenciar un objeto de otro.
Reconocimiento e interpretación [12, 13, 45]. Este es el último paso en el
procesamiento de imágenes. El reconocimiento es un proceso que asigna una etiqueta a
cada objeto basado en la información de los descriptores. La interpretación asigna un
significado a los objetos reconocidos y permite dar significado a la escena que se está
analizando.
Base de conocimientos. El conocimiento sobre el dominio del problema es
codificado en la base de conocimiento. Este conocimiento puede consistir en explicar a
detalle cuales son las regiones de la imagen donde la información de interés se

16
encuentra, lo cual ayuda a enfocar la búsqueda a los objetos que son de interés para
la aplicación.
Figura 2.2 Elementos de un sistema de procesamiento de imágenes.
2.2 Geometría de imágenes.
Es importante saber como se forman las imágenes 2D a partir de las imágenes
tridimensionales, ya que esto permite entender los métodos de recuperación de
información tridimensional a partir de las imágenes. Dos cuestiones muy importantes
en la formación de imágenes es determinar la ubicación de la imagen de un punto dado
y qué es lo que determina la brillantez de una superficie.
2.2.1 Importancia de la perspectiva en el procesamiento de imágenes.
Para el procesamiento de imágenes en forma digital es muy importante la
perspectiva, pues debemos tener en cuenta que las imágenes del mundo real
(tridimensionales) son procesadas en un mundo bidimensional (2D), por lo que al
procesarlas es necesario saber como influye en la interpretación de la imagen del
mundo real a partir de la imagen en dos dimensiones.
2.2.2 Tipos de perspectiva.
Proyección en perspectiva.
BASE DE
CONOCIMIENTOS
Adquisición de imagen
Preprocesado
Segmentación
Representación
y descripción
Reconocimiento e
interpretación
Dominio del problema

17
En la figura 2.3, consideremos un agujero ideal a una distancia fija del plano
de la imagen, en la que se considera que solo la luz que viene del ojo de la aguja llega
al plano de la imagen. Como la luz viaja en línea recta, cada punto en la imagen
corresponde a una dirección particular definida por un rayo desde el punto a través del
ojo de la aguja. Sea el eje óptico la perpendicular al plano de la imagen que pasa a
través del ojo de la aguja. Colocamos un sistema de coordenadas cuyo origen coincide
con el ojo de la aguja y de tal manera que el eje z coincida con el eje óptico y orientado
hacia la imagen. De esta manera los puntos hacia los que observa la cámara tienen
componente z negativa.
Se desea calcular donde aparecerá la imagen P′ del punto P que está ubicado
sobre un objeto que está enfrente de la cámara, como se muestra en la Figura. No
existe ningún otro objeto entre el punto P y el ojo de la aguja.
Sea ),,( zyxr = t el vector que une P y O y ),,( zyxr ′′′=′ el que une O y P′ .
En la Figura se observa que el rayo PP ′ forma un ángulo α con el eje óptico,
por lo que podemos deducir que:
r
zrˆ)cos( −=α (2.3)
Donde z es un vector unitario en la dirección del eje óptico. Los puntos delante
de la cámara tienen componente z negativa, y también se cumple que
r
f ')cos( −=α (2.4)
Por lo tanto,
zr
r
f
r
ˆ'
'= (2.5)
Lo cual nos conduce, utilizando las coordenadas, a

18
z
x
f
x=
'
'
z
y
f
y=
'
'(2.6)
Figura 2.3 - Un agujero muy pequeño (ojo de aguja) O, a una distancia fija f del plano de proyección.
Proyección Ortográfica.
Consideremos la proyección de perspectiva donde el plano de la imagen se
encuentra en 0=z , el ojo de la aguja en fz = y el plano en zz = , con zf > .Las
ecuaciones de la proyección de perspectiva serían:
zf
x
f
x
−=
' y
zf
y
f
y
−=
' (2.7)
Con la z proyectada igual a cero en todos los casos.
Proyección de perspectiva débil.
Como se presentó en la sección anterior, la perspectiva “pinhole” es solamente
una aproximación de la geometría del proceso de imágenes. Aquí se presenta una
forma de aproximación más burda, llamada modelo de proyección afín, que también es
útil en ocasiones. Este tipo de aproximación se clasifica en otros dos modelos:
proyección de perspectiva débil y la proyección ortográfica, ya tratada anteriormente.

19
Como se muestra en la Figura 2.4, se tiene un plano ∏0definido por 0zz = .
Para cualquier punto P en ∏0la proyección en perspectiva se puede escribir como
myy
mxx
−=
−=
'
' (2.8)
con 0
'
z
fm −= (2.9)
Las restricciones físicas exigen que 0z sea negativo (el plano debe estar en frente
del pinhole), de tal forma que el factor de magnificación m asociado con el plano sea
positiva. Sean los puntos P y Q y sus imágenes P′ y Q′ , (Figura 2.4).Como
podemos observar los vectores >−−−
''QP y >−−−
PQ son paralelos y tenemos que
>−−−
''QP =>−−−
PQm .
Cuando la profundidad de la escena es pequeña respecto a la distancia promedio
desde la cámara, el factor de magnificación puede ser considerado constante. Este
modelo se proyección es llamado perspectiva débil o escalado.
Figura 2.4 Esquema de la proyección en perspectiva débil: todos los segmentos de
línea son proyectados con la misma magnificación.
2.3 Métodos de procesamiento de imágenes.
Q
P
Q’
P’
π0 π1
j
i
f’ -z0’
O k

20
Desde el inicio del procesamiento de información en forma digital ha existido
un creciente interés por el desarrollo de algoritmos que faciliten los procesos
implementados en la computadora; los en lo que se refiere a imágenes no ha sido la
excepción y muchos investigadores han enfocado sus esfuerzos en el diseño de
algoritmos para el procesamiento de imágenes por medio de la computadora.
2.3.1 Representación digital de la imagen
Una vez que una imagen es adquirida por medio de un dispositivo, es necesario
realizar un proceso de conversión al formato que la computadora maneja: el formato
digital.
Las escenas que se muestran en las secciones subsiguientes, donde aparecen
imágenes de vehículos, la mayoría fueron proporcionadas por el SINTRAM.
2.3.2 Almacenamiento de imágenes.
Al seleccionar un formato de almacenamiento de las imágenes digitales es
necesario considerar dos características fundamentales [19], como son la profundidad
del color y la compresión.
Cuando hablamos de la profundidad del color nos referimos al número máximo
de colores que puede tener una imagen en determinado formato. Para el número de
colores se requieren cierto número bits, por ejemplo para una imagen blanco y negro
(binaria) sólo se necesita un bit. Al principio las tarjetas de video sólo soportaban 16
colores, posteriormente hasta 256 y actualmente están en el orden de 16 millones de
colores.
Al hablar de compresión, se entiende si la imagen se va almacenar en forma
original o bien va a pasar por un proceso de compactación.
El compromiso entre comprimir o no comprimir una imagen no representa en
realidad problema alguno ya que el proceso de efectuar la compresión al grabarlas y
descomprimirlas cuando se leen no implica un tiempo considerable. Hay que
mencionar también que una imagen comprimida ocupa menos espacio.

21
En realidad el problema que se debe considerar es si es una compresión con
pérdida o sin pérdida.
El mecanismo de compresión con pérdida involucra un proceso de compactación
de la información de la imagen digital que trae como consecuencia pérdida de
información y consecuentemente pérdida de calidad de la imagen. El algoritmo de
codificación tiene como objetivo representar la información de la imagen utilizando
una menor cantidad de la misma, de manera que no es posible la reconstrucción exacta
de la imagen original. Este mecanismo por lo tanto sólo será útil cuando la
reconstrucción exacta no es necesaria para que la información tenga sentido, pues la
información reconstruida es solamente una aproximación de la original. La ventaja que
tienen son las altas tasas de compresión.
Las técnicas más comunes de compresión con pérdida son:
a) Por códecs de transformación: Los datos se transforman de manera que se
simplifican y no pueden regresar a los datos originales, y se crea un nuevo conjunto de
datos con altas tasas de compresión.
b).- Por códecs predictivos: los datos originales se analizan con el fin de poder
predecir su comportamiento, comparándose la predicción con la realidad, se codifica el
error y la información necesaria para la reconstrucción.
JPEG (Joint Photographic Experts Group) es un algoritmo diseñado para
comprimir imágenes con 24 bits de profundidad o en escala de grises. También se le
llama así al formato de los ficheros que utilizan este algoritmo de compresión de
imágenes JPEG se utiliza para imágenes fijas, pero también existe un estándar llamado
MPEG para videos. JPEG se abrevia algunas veces como JPG debido a que algunos
sistemas operativos sólo aceptan tres letras como extensión.
Los algoritmos de compresión sin pérdida son procedimientos de codificación
que representan la información sin utilizar una menor cantidad de la misma, lo cual
permite la reconstrucción exacta de los datos. La compresión sin pérdida es necesaria
cuando se requiere conservar íntegramente la información original de las imágenes.

22
La compresión sin pérdida se utiliza en compresores de archivo como RAR,
Gzip, Bzip, zip, 7z, en imágenes (PNG) y también en algunos formatos de audio como
WAV.
TIFF (Tagged Image File Format): es uno de los formatos de almacenamiento
sin pérdidas utilizado por muchas cámaras digitales. Es usado también en los
programas de retoque de imágenes digitales. Este formato de almacenamiento es de la
más alta calidad. Admite una profundidad de color de 64 bits, aunque gracias al uso del
algoritmo de compresión sin pérdidas consigue reducir su nivel de espacio.
RAW: Es un formato alternativo a TIFF. En este mecanismo se almacena
directamente la información que procede del sensor de la cámara digital. Si se tuviera
la necesidad de convertirla a TIFF el proceso requeriría mayor tiempo y mayor espacio
de almacenamiento. Hay diferencias en los formatos RAW de un fabricante a otro.
Como inconveniente tiene que para poder trabajar con las imágenes en un PC o para
imprimirlas hay que llevar a cabo su conversión a otro formato estándar, lo cual lleva
un cierto tiempo. Sin embargo, el nivel de calidad que tienen las imágenes en RAW es
semejante al de las imágenes TIFF .
GIF es otro de los formatos muy conocidos por los usuarios de Internet. Utiliza
un algoritmo de compresión sin pérdidas. Sin embargo, la calidad en las imágenes no
llega a ser muy alta por su limitada profundidad de color el cual es de sólo 8 bits.
Permite transparencias e imágenes rodantes a los cuales se les llama GIF’s animados.
PNG (Portable Network Graphics), es un formato de almacenamiento de
imágenes que se basa en un algoritmo de compresión sin pérdida para bitmaps. Fue
desarrollado para resolver las deficiencias del formato GIF, permitiendo almacenar
imágenes con una mayor profundidad de contraste, hasta de 48 bits.
PCX: (PiCture Xchange) es un formato de imagen digital que usa la codificación
run-length (un tipo de compresión sin pérdidas). Fue el formato para el programa
Paintbrush, uno de los primeros programas gráficos muy populares.
PDF: (Portable Document Format) es un formato para el almacenamiento de
documentos y fue desarrollado por Adobe Systems, diseñado para documentos que van

23
a ser impresos, pues especifica la información necesaria para la presentación final
del documento y determinando todos los detalles. Ha obtenido mucha popularidad, por
la calidad de las fuentes que utiliza y a las facilidades que ofrece.
BMP (BitMaP) o mapa de bits: Es el formato utilizado por el programa
Microsoft Paint, el cual viene con el sistema operativo Windows. Puede manejar hasta
224 (16 millones de colores), con compresión sin pérdida de calidad a través del
algoritmo RLE (Run Length Encoding). Se caracterizan por ser poco eficientes en el
uso del espacio en disco, pero a cambio pueden mostrar un buen nivel de calidad de la
imagen; al ser reescalados a un tamaño mayor pierden calidad.
2.3.3 Restauración y mejora de imágenes
Mejora de imágenes. El objetivo de un procedimiento de mejora de imágenes es
procesar una imagen de tal manera que resulte mejor que la original para una
aplicación dada; al hablar de una aplicación dada significa que las técnicas que se
utilicen serán orientadas a la solución del problema en cuestión y quizá no servirán
para otro problema distinto.
Normalmente los métodos son de dos tipos [3]: los orientados al dominio del
espacio y los orientados al dominio de la frecuencia.
Métodos en el dominio espacial.
Las técnicas basadas en el dominio espacial trabajan sobre el plano de la imagen
y realizan la manipulación de los píxeles, mientras que los procedimientos del dominio
de la frecuencia realizan operaciones sobre la transformada de Fourier.
El dominio espacial se refiere a los píxeles que constituyen la imagen y los
métodos en el dominio espacial son los procedimientos que operan en ese dominio.
Las funciones que operan en este dominio tienen la forma
{ ),(),( yxfTyxg = } (2.9)
24
En la que { }),( yxf representa la imagen de entrada, ),( yxg es la imagen
procesada, y T es una función de transformación que actúa sobre f, definido en algún
entorno válido de f .
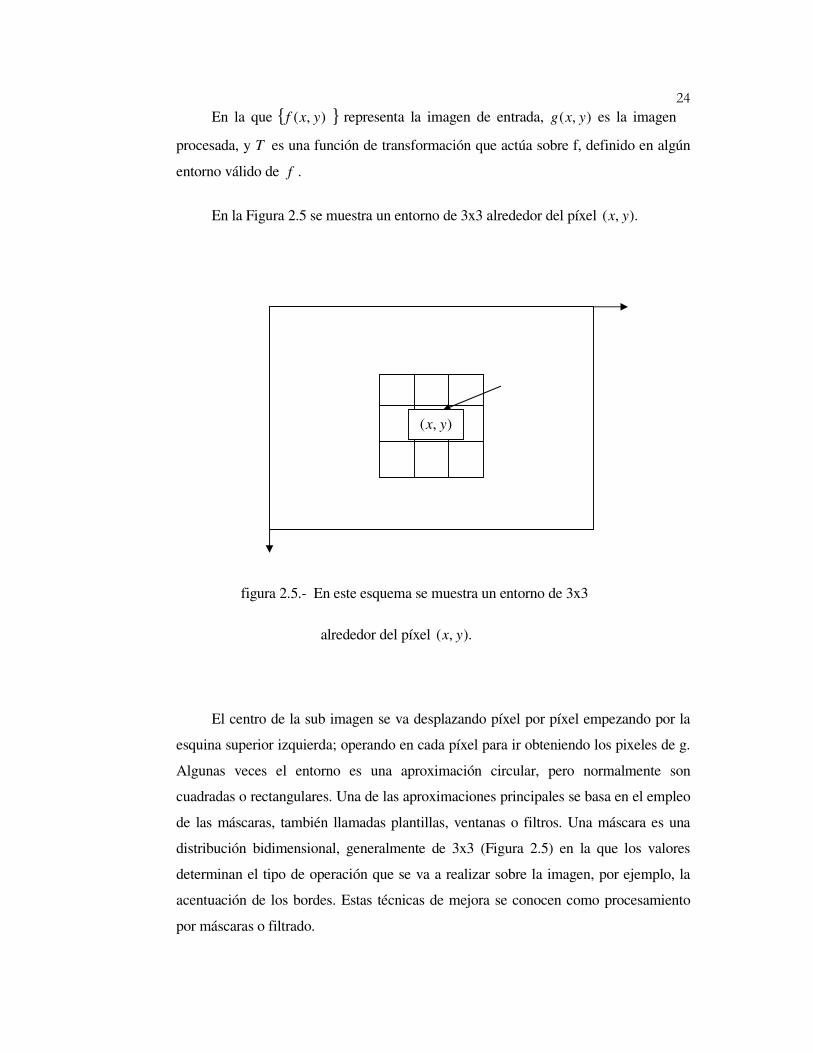
En la Figura 2.5 se muestra un entorno de 3x3 alrededor del píxel ).,( yx
figura 2.5.- En este esquema se muestra un entorno de 3x3
alrededor del píxel ).,( yx
El centro de la sub imagen se va desplazando píxel por píxel empezando por la
esquina superior izquierda; operando en cada píxel para ir obteniendo los pixeles de g.
Algunas veces el entorno es una aproximación circular, pero normalmente son
cuadradas o rectangulares. Una de las aproximaciones principales se basa en el empleo
de las máscaras, también llamadas plantillas, ventanas o filtros. Una máscara es una
distribución bidimensional, generalmente de 3x3 (Figura 2.5) en la que los valores
determinan el tipo de operación que se va a realizar sobre la imagen, por ejemplo, la
acentuación de los bordes. Estas técnicas de mejora se conocen como procesamiento
por máscaras o filtrado.
),( yx

25
Métodos en el dominio de la frecuencia.
Estas técnicas tienen su base en el teorema de convolución. Sea ),( yxg una
imagen formada por una convolución de una imagen f (x, y) y un operador lineal
invariante h(x, y), es decir,
),(*),(),( yxfyxhyxg = (2.10)
Un operador lineal invariante, es aquel cuyo resultado depende solo del valor de
),( yxf en un punto de la imagen y no de la posición del punto.
Por el teorema de convolución se tiene la siguiente relación en el dominio de la
frecuencia:
),(*),(),( vuFvuHvuG = (2.11)
Donde FHG ,, son las transformadas de Fourier de las funciones fhg ,, ,
respectivamente.
figura 2.6.- Esquema de un sistema lineal
En la teoría de los sistemas lineales, a ),( vuH se le conoce como función de
transferencia del proceso.(figura 2.6).
Para una aplicación dada, ),( yxf es conocida y el objetivo es que, una vez que
se obtuvo su transformada de Fourier, ),( vuF , se seleccione ),( vuH de tal forma que
),( vuG ),( vuH ),( vuF
26
la imagen deseada, la cual es la transformada de Fourier inversa, de ),( vuG , tenga
alguna característica de ),( yxf resaltada, es decir,
)),(*),((),( 1 vuFvuHyxg −ℑ= (2.12)
Por ejemplo se podrían resaltar los bordes de una imagen si seleccionamos la
función de transferencia ),( vuH de tal manera que haga énfasis en los componentes
de alta frecuencia de la función ),( vuF en el dominio de Fourier.
El filtrado de imágenes se puede realizar en el dominio espacial como se
describió utilizando una máscara, lo cual representa una convolución en el dominio
espacial. De acuerdo al teorema de convolución, realizar la convolución en el dominio
espacial es lo mismo que multiplicar sus espectros en el dominio de la frecuencia, el
filtrado se podría realizar en el dominio de la frecuencia realizando los siguientes
pasos:
a).- Transformar los datos al dominio de la frecuencia mediante la transformada
de Fourier.
b).- Multiplicar el espectro de la imagen por una máscara de filtrado
seleccionada.
c).- Transformar el espectro al dominio espacial mediante la transformada de
Fourier inversa.
Para el filtrado, existen muchos tipos de filtros, los cuales se clasifican en filtros
de paso bajo, paso alto y filtros banda. Los filtros de paso bajo, dejan pasar las
frecuencias bajas y atenúan las frecuencias altas; los filtros de paso alto, permiten el
paso de frecuencias altas y atenúan las bajas frecuencias; los filtros paso banda sólo
permiten las frecuencias dentro de un rango especificado.
2.3.4 Segmentación.
La segmentación [19, 31, 50] es un proceso mediante el cual se busca agrupar
regiones que reúnan ciertas condiciones de proximidad, similitud, continuidad de tal
manera que se les pueda asignar un significado.

27
La segmentación es la parte fundamental del proceso de visión computacional,
pues una buena segmentación facilitará los siguientes pasos del proceso.
Existen diferentes tipos de segmentación como son las siguientes:
Segmentación a bajo nivel, que utilizan la medida de intensidad de los pixeles
como medida de similitud. Entre las técnicas más utilizadas se encuentran los métodos
orientados a píxel, los métodos orientados a contorno y los métodos orientados a
regiones.
Los métodos orientados a píxel utilizan la intensidad del píxel como un criterio
de pertenencia a una cierta clase en conjunción con un umbral que podría ser
adaptativo. Este método tiene la desventaja de que ignora la conectividad y la
proximidad.
Los métodos orientados a contorno utilizan la noción de conectividad para
asociar regiones que tienen niveles de intensidad similares y que pertenecen a
entidades distintas en la imagen.
Los métodos orientados a contorno suponen que hay una correspondencia entre
la continuidad de la intensidad y los contornos o bordes de los objetos que aparecen en
la imagen. Sin embargo, la información utilizada no siempre es suficiente, por lo que
conduce a ambigüedades en la interpretación de la imagen o a inconsistencias en la
misma.
Segmentación a nivel medio, realizan la agrupación de los pixeles asignados de
acuerdo a una estructura de datos propia de cada entidad, de manera que describa el
contenido de la imagen. Las entidades extraídas deben cumplir con ciertas condiciones,
por ejemplo que los contornos sean continuos y conexos, y que las regiones sean
conexas y cerradas.
Los métodos utilizados en este nivel son: Métodos de preprocesado de pixeles
asignados a clases, métodos de agrupación de pixeles a entidades y métodos de
postprocesado de entidades.
28
Segmentación de alto nivel, este tipo de segmentación tiene como propósito la
interpretación de la escena, por lo que el desarrollo de un sistema de segmentación a
este nivel constituye un problema con nivel de complejidad muy elevado.
2.3.4.1 Métodos de segmentación.
Se han dividido los métodos de segmentación de imágenes [19] en varias
categorías entre las más importantes destacan las siguientes:
Métodos de umbralización, métodos de región creciente, clasificadores, métodos
de agrupamiento (inglés: clustering methods), modelos de campos aleatorios de
Markov, redes neurales artificiales, modelos deformables y métodos guiados por
plantillas. los de umbralización, clasificación, agrupamiento, y campos aleatorios de
Markov, pueden considerarse métodos de clasificación de pixeles.
Es conveniente destacar que la mayoría de los métodos de segmentación pueden
ser vistos como problemas de optimización donde la segmentación deseada es la que
minimiza alguna función de energía o de costo, definida para una aplicación en
particular. La ventaja de ver la segmentación como un problema de optimización es
que define de manera precisa los aspectos deseables de la segmentación. También es
necesario observar que, para diferentes aplicaciones, se necesitan diferentes funciones
de energía o costo.
Umbralización.
La umbralización (Inglés: thresholding) es un método para segmentar imágenes
creando una partición binaria de las intensidades de las imágenes. Una umbralización
trata de determinar un valor de intensidad, llamado umbral (threshold), que separa la
clases deseadas. La segmentación se logra agrupando todos los pixeles con mayor
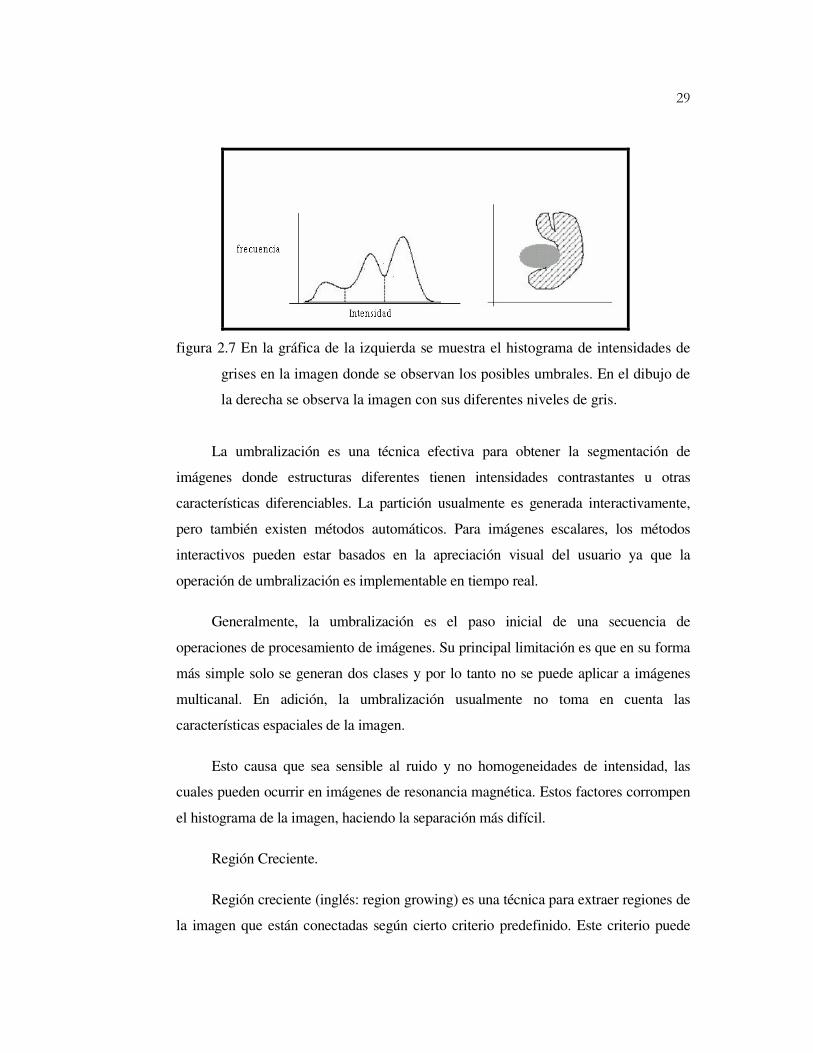
intensidad al umbral en una clase, y todos los otros pixeles en otra clase. La figura 2.7
muestra un histograma de una imagen que aparentemente posee tres clases, lo cual nos
deja dos posibles valores de umbral, en los valles del histograma. La determinación de
más de un valor umbral es un proceso llamado multiumbralización (inglés:
multithresholding).
29
figura 2.7 En la gráfica de la izquierda se muestra el histograma de intensidades de
grises en la imagen donde se observan los posibles umbrales. En el dibujo de
la derecha se observa la imagen con sus diferentes niveles de gris.
La umbralización es una técnica efectiva para obtener la segmentación de
imágenes donde estructuras diferentes tienen intensidades contrastantes u otras
características diferenciables. La partición usualmente es generada interactivamente,
pero también existen métodos automáticos. Para imágenes escalares, los métodos
interactivos pueden estar basados en la apreciación visual del usuario ya que la
operación de umbralización es implementable en tiempo real.
Generalmente, la umbralización es el paso inicial de una secuencia de
operaciones de procesamiento de imágenes. Su principal limitación es que en su forma
más simple solo se generan dos clases y por lo tanto no se puede aplicar a imágenes
multicanal. En adición, la umbralización usualmente no toma en cuenta las
características espaciales de la imagen.
Esto causa que sea sensible al ruido y no homogeneidades de intensidad, las
cuales pueden ocurrir en imágenes de resonancia magnética. Estos factores corrompen
el histograma de la imagen, haciendo la separación más difícil.
Región Creciente.
Región creciente (inglés: region growing) es una técnica para extraer regiones de
la imagen que están conectadas según cierto criterio predefinido. Este criterio puede

30
estar basado en información de intensidades y/o bordes de la imagen. En su forma
más simple, este método requiere un punto semilla (inglés: seed point) que es
seleccionado manualmente por el usuario, y extrae todos los pixeles conectados a la
semilla, que tengan el mismo valor de intensidad. La figura 2.8 muestra un ejemplo
donde se utiliza el método de región creciente para aislar una estructura de la figura 2.7
del lado izquierdo.
Figura 2.8. En el dibujo de la izquierda se muestra una imagen con la semilla inicial.
En la gráfica de la derecha se muestra la clasificación utilizando el método de
región creciente.
Al igual que la umbralización, por lo general no se utiliza la región creciente
solamente en una imagen, sino que se utiliza como parte de un conjunto de operaciones
de procesamiento de imágenes, particularmente en la delineación de pequeñas y
simples estructuras. Su desventaja principal es que requiere interacción manual para
obtener el punto semilla. Los algoritmos de división y mezcla (inglés: split and merge)
están relacionados con la región creciente pero no requieren una semilla. La región
creciente también puede ser sensible al ruido, causando que las regiones extraídas
tengan agujeros e inclusive que se desconecten.
Clasificadores.
Los métodos clasificadores son técnicas de reconocimiento de patrones [13, 15,
34] que realizan una partición de un espacio característico derivado de la imagen
usando datos con etiquetas conocidas. Un espacio característico es un rango espacial

31
de cualquier función de la imagen, siendo las intensidades de la imagen el más
común de los espacios característicos.
Un histograma, como el de la figura 2.4 del lado izquierdo, es un ejemplo de un
espacio característico 1D. La figura 2.5 derecha muestra un ejemplo de un espacio
característico 2D particionado en dos clases aparentes. Todos los pixeles cuyas
características estén en el lado derecho de la partición serían agrupados en una clase.
Los clasificadores son conocidos como métodos supervisados debido a que
requieren datos de entrenamiento que son segmentados manualmente, para luego ser
utilizados en la segmentación automática de nuevos datos. Hay una gran cantidad de
maneras en las que los datos de entrenamiento pueden ser aplicados en los métodos de
clasificación. Un clasificador simple es el clasificador del vecino más cercano, donde
cada píxel o voxel es clasificado en la misma clase que el dato de entrenamiento con la
intensidad más cercana. Los k vecinos más cercanos (kNN – k Nearest Neighbor) (Fix
y Hodges, 1951) es una generalización de este método. Otros clasificadores utilizados
son la ventana de Parzen [28] y el clasificador de Bayes[18,47]. Los clasificadores
estándar requieren que la estructura a ser segmentada posea características
cuantificables distintas. Debido a que los datos de entrenamiento pueden ser
etiquetados, los clasificadores pueden transferir estas etiquetas a los nuevos datos
siempre que el espacio característico distinga cada etiqueta lo suficiente. No son
iterativos, por lo que son relativamente eficientes computacionalmente y pueden ser
aplicados a imágenes multicanal. Una desventaja de los clasificadores es que no
obedecen a ningún modelo espacial. Otra desventaja es la necesidad de la interacción
manual para obtener los datos de entrenamiento. Los conjuntos de entrenamiento
pueden ser adquiridos para cada imagen que requiera segmentación, pero esto puede
tomar mucho tiempo y esfuerzo. En adición, el uso del mismo conjunto de
entrenamiento para un gran número de imágenes puede llevar a resultados viciados, ya
que no toman en cuenta las variaciones entre diferentes tipos de objetos.
Algoritmos de agrupamiento.
Los algoritmos de agrupamiento llevan a cabo esencialmente la misma función
que los métodos clasificadores, pero sin utilizar datos de entrenamiento. Por lo tanto,

32
son métodos no supervisados. Para compensar la falta de los datos de entrenamiento,
los métodos de agrupamiento iteran entre segmentar la imagen y caracterizar las
propiedades de cada clase. En este sentido, los métodos de agrupamiento se entrenan a
si mismos usando los datos disponibles. Un algoritmo de agrupamiento común es el
algoritmo de las K-medias [35] o algoritmo ISODATA (Ridler y Calvard, 1978). Este
algoritmo agrupa datos calculando iterativamente la media de la intensidad para cada
clase y segmentando la imagen mediante la clasificación de cada píxel en la clase con
la media más cercana. La figura 2.8 (b) muestra el resultado de aplicar [8] el algoritmo
de las K-medias a un corte del cerebro en la figura 2.8(a) . En este ejemplo se asumió
que el número de clases era tres, representando (de gris oscuro a blanco) el fluido
cerebroespinal, materia gris y materia blanca.
Aunque los algoritmos de agrupamiento no requieren que los datos se entrenen,
si requieren un segmentación inicial (o de manera equivalente, requiere parámetros
iniciales).
Como los métodos de clasificación, los algoritmos de agrupamiento no
incorporan directamente un modelo espacial. De cualquier forma, esta falta de
modelado espacial puede proveer ventajas significativas para realizar los cálculos
velozmente. Es posible incorporar robustez al ruido usando campos aleatorios de
Markov [11], como se describe en la sección siguiente.
Figura 2.8 a) Imagen original.- b).- Segmentación utilizando el algoritmo de
las K-medias.

33
Campos aleatorios de Markov.
Los modelos de campos aleatorios de Markov (MRF – inglés: Markov Random
Fields) son un modelo estadístico que puede ser usado dentro de los métodos de
segmentación. Los MRF permiten modelar las interacciones espaciales entre vecinos o
pixeles cercanos. Estas correlaciones locales proporcionan un mecanismo para modelar
las propiedades de la imagen. En el tratamiento de imágenes médicas, se utilizan
frecuentemente para tomar en cuenta el hecho que la mayoría de los pixeles pertenecen
a la misma clase a la que pertenecen sus pixeles vecinos. En términos físicos, esto
implica que bajo la asunción del MRF, cualquier estructura anatómica que consista de
un solo píxel tiene una probabilidad muy baja de ocurrir.
Los MRF son incorporados frecuentemente en los algoritmos de segmentación
por agrupamiento, como las K-medias bajo un modelo Bayesiano previo. La
segmentación es obtenida maximizando la probabilidad a posteriori de la segmentación
a partir de los datos de la imagen, obtenidos mediante métodos iterativos como los
Modos Condicionales Iterados, presentados por Besag [2], o el Templado Simulado,
presentado por Geman et al [18]. La figura 2.9b muestra la robustez de la
segmentación frente al ruido, resultante de un MRF previo. La segmentación es más
suave que el resultado sin MRF de la figura 2.8b.
Una dificultad asociada con los modelos MRF es la selección apropiada de los
parámetros que controlan la fuerza de las interacciones espaciales. Una selección muy
alta puede resultar en segmentación excesivamente suave y una pérdida de los detalles
estructurales. En adición, los métodos MRF usualmente requieren algoritmos
computacionalmente intensivos. A pesar de estas desventajas, los MRF son
ampliamente utilizados no solo para modelar clases de segmentación, sino también
para modelar propiedades de texturas y no homogeneidades de las intensidades.

34
Figura 2.9 a) Imagen original, b) Segmentación mediante el algoritmo de K-medias y
usando un MRF previo.
2.3.5 Sustracción de Fondo.
Uno de los problemas principales en el procesamiento de secuencias de
imágenes es cómo separar los objetos principales o de interés del resto de los objetos
que aparecen en la imagen o imágenes. Es decir, dada una secuencia de imágenes
obtenidas en este caso por una cámara fija, cómo detectar los objetos que podemos
considerar como foreground (esto es, los objetos que están en primer plano,
considerados como los que están más cerca del espectador u observador).
Una forma muy sencilla de realizar este proceso, considerada como una
aproximación ingenua en la literatura, es calcular la diferencia entre el fotograma
actual y una imagen del background (fondo) estático de la escena bajo análisis, como
se muestra en la siguiente fórmula:
umbralfondofotogramai >− (2.13)
Esto nos conduce rápidamente a preguntarnos dos cosas, la primera relacionada
con cómo obtener la imagen del fondo estático y la segunda como calcular el umbral
apropiado.

35
El problema de background es algo muy delicado porque está influenciado por
muchos factores del medio ambiente, como pueden ser:
Cambios en la iluminación.
Presencia de nubes.
Hora del día.
Movimientos de la cámara por el viento, aún cuando esté fija en el poste.
Movimiento de objetos del fondo, como las oscilaciones de las hojas de los
árboles.
Posibles cambios en la estructura geométrica del fondo; por ejemplo, objetos que
estaban fijos, y se quitaron en algún momento de la grabación del video.
a).- Un método para calcular el fondo es por simple diferencia de fotogramas:
Umbralfotogramafotograma ii >− −1 (2.14)
en el que podemos observar el fondo estimado que se está utilizando es
justamente el fotograma previo. Cabe observar que este método [1] funciona solamente
en condiciones particulares de velocidad de los objetos y tasa de fotogramas.
b).- Otro método utiliza el promedio o la mediana de un cierto número n de
fotogramas previos; en este caso se obtiene el promedio (o la mediana) de los valores
de intensidad de cada píxel correspondiente en cada fotograma.
c).- Otro método de cálculo utiliza el fotograma actual y el fondo previo para
calcular el fondo actual, mediante la siguiente fórmula:
iii BframeB *)1(*1 αα −+=+ (2.14)
donde α , llamada tasa de aprendizaje, se le asigna un valor de .05

36
d).- Otros métodos más sofisticados, proporcionan un cálculo explícito del
umbral, como el Running Gaussian Average [19], donde se ajusta una curva normal al
histograma y esto da el background, de acuerdo a la fórmula:
ttt F µααµ *)1(*1 −+=+ (2.15)
2221 )1()( tttt F σαµασ −+−=+ (2.16)
Métodos más recientes, mezcla de gaussianas, estimadores de kernel, estimación
basada en el corrimiento de la media y estimación de eigenbackgrounds (backgrounds
propios).
Una aplicación del método promedios de sustracción de fondo (figura 2.11) para
detectar los vehículos en movimiento (figura 2.10) utilizando Matlab, se realizó para
aislar los objetos en movimiento (figura 2.12) de una escena utilizando secuencias de
imágenes de video.
Figura 2.10 Escena que muestra coches en movimiento.

37
El objetivo de este análisis fue detectar cuales eran los objetos que se estaban
moviendo en la escena, por lo que el primer paso fue obtener el fondo de la escena,
utilizando el promedio de fotogramas. Posteriormente, se obtiene la diferencia de cada
fotograma con el fondo obtenido (píxel a píxel), comparar contra un umbral que
también es necesario definir utilizando algún criterio y de esa manera obtener solo los
pixeles que se están moviendo. En este ejemplo el umbral utilizado fue de 140, para
decidir si un píxel dado corresponde al fondo o al primer nivel.
Figura 2.11 En esta escena se utilizó el método de promedio de cada píxel correspondiente en 200 fotogramas para obtener el fondo estático.

38
Figura 2.12.- Escena procesada donde se ha aplicado el método de sustracción de fondo para aislar los objetos en movimiento.
2.3.6 Distintos tipos de transformadas aplicadas a imágenes.
Existen un conjunto de transformaciones u operaciones [33, 41, 46] que se
pueden realizar sobre las imágenes, en seguida se presenta un bosquejo de las distintas
transformaciones más importantes.
Operaciones aritméticas. Las imágenes se pueden sumar, restar, multiplicar y
dividir; para ello se realizan las operaciones con los valores del nivel de gris de cada
píxel. Por ejemplo, para hacer la suma, se toma el valor del nivel de gris del píxel en
una imagen y el valor del nivel del nivel de gris del píxel correspondiente en la imagen
que se está sumando, y el resultado es el que corresponde al píxel en la imagen
resultado. De la misma manera se realizan las otras operaciones aritméticas.
Operaciones lógicas (booleanas). Las operaciones lógicas se realizan de la
misma forma que las aritméticas, excepto que en este caso los valores de los pixeles
deben ser binarios ( 0 ,1). Las operaciones que se pueden realizar son AND, OR, XOR
, NOT.
Operaciones morfológicas. Este tipo de operaciones simplifican los datos de la
imagen, preservan características que son importantes y eliminan los irrelevantes. Al
usarse, constituyen un paso intermedio en la secuencia del procesamiento de las
imágenes. El lenguaje que utiliza la morfología matemática es la teoría de conjuntos.
Las principales operaciones morfológicas son la dilatación y la erosión y a partir
de ellas surgen otras operaciones llamadas apertura y clausura.
La operación de erosión consiste en la eliminación de los pixeles vecinos a un
píxel dado, poniéndolos en cero, a través de un criterio de conectividad.
La operación de dilatación consiste en la incorporación de pixeles vecinos a un
píxel dado, poniéndolos en uno, de la misma manera utilizando un criterio de
conectividad; hace crecer los objetos por su periferia y rellena los agujeros pequeños.
39
Estas operaciones producen la disminución o el aumento del área de la
imagen, y producen cambios importantes en las regiones delgadas de los objetos,
cambian el perímetro y la forma, y el número de agujeros del objeto. Se pueden
combinar para restaurar las disminuciones o adiciones de los pixeles periféricos tras
haberse realizado la operación contraria, pero no siempre es exitosa esta restauración.
Una apertura encadena una operación de erosión seguida de una dilatación y una
operación de clausura, encadena una erosión con una dilatación.
2.3.7 Transformada de Hough.
La transformada de Hough [10] es una técnica que se utiliza para aislar
características en una imagen. Es de gran importancia para detectar características tales
como líneas y círculos, y parámetros relevantes de las imágenes.
La transformada de Hough clásica es utilizada para detectar características
regulares como líneas, círculos y elipses. La transformada de Hough Generalizada es
utilizada en aplicaciones donde no se cuenta con una descripción analítica sencilla de
una característica.
La transformada es útil para calcular una descripción global de una
característica, donde el número de soluciones no necesitan conocerse a priori. En el
caso de detección de líneas, la técnica tiene la motivación de que cada medida, por
ejemplo las coordenadas de un punto, contribuye a una solución global consistente,
que es la línea a la que conduce ese punto de la imagen.
En la figura 2.13 se presenta un ejemplo sencillo que consiste en ajustar líneas a
un conjunto de puntos de una imagen (por ejemplo, lo que sería la salida en un detector
de bordes), los cuales se muestran en la parte izquierda de la figura; a la derecha se
muestran algunas posibles líneas para esos puntos.

40
.
. .
.
.
.
. .
.
.
..
. .
.
.
.
. .
.
.
.
. .
.
.
.
. .
.
.
.
Figura 2.13.- Ajuste de líneas a un conjunto de puntos.
El algoritmo de la transformada Hough utiliza un arreglo al que se le llama
acumulador, para detectar líneas bmxy += ; las dimensiones del arreglo dependen del
número de parámetros desconocidos del problema. En el caso de las líneas son dos: m
y b . Para cada píxel y su vecindario, la transformada Hough determina si pertenece a
un borde; si es así, calcula los parámetros de esa línea y busca en los depósitos del
acumulador en el que esos parámetros caen, incrementando su valor; posteriormente
encuentra cual es el depósito con los valores máximos y de esa manera determina las
líneas que mejor ajustan a los puntos dados.
Cualquier línea recta en el espacio yx, es representada por un punto en el
espacio de parámetros θρ , y todos los puntos de esa línea recta son transformados a
ese mismo punto, de acuerdo con la ecuación:
θθρ senyx ii += cos (2.17)
donde ρ es la distancia de la línea recta al origen y θ es el ángulo que forma la
normal a la recta con el eje .x
En la figura 2.14 se muestra esta dualidad entre el espacio yx, y el espacio de
parámetros ρθ , .

41
y
Figura 2.14.- Los puntos que forman la línea recta en la gráfica de la izquierda son transformados en curvas senoidales en el plano ρθ , ; los puntos de intersección de las curvas senoidales corresponden a la recta en el plano yx,
Para ejemplificar en forma sencilla, consideremos los datos de la tabla 2.1
correspondientes a la ecuación de la recta 23 += xy . En el cuadro 2.2 se muestran
distintos valores de los ángulos para transformar al espacio ρθ , ; en ese cuadro
observamos que está resaltado el renglón correspondiente a los parámetros de la línea
recta y son los valores 06.161=θ y 63.0=ρ , como se puede verificar de la ecuación
de la recta cuya pendiente es 3 y por lo tanto su recíproco y de signo contrario es 3
1− y
corresponde a un ángulo de 161.6560. Al graficar cada uno de esos puntos con los
valores dados de los parámetros en el plano ρθ , , veríamos que las curvas
correspondientes se intersectarían en ese punto (161.6,.63), de acuerdo con la gráfica
2.14.
.
.
.
.
. x
ρ
θ

42
Cuadro 2.1 Conjunto de datos
Cuadro 2.2. Espacio de parámetros para los puntos del cuadro 2.1
2.4 Teoría de tránsito.
2.4.1 Antecedentes.
El problema de tránsito en las ciudades, se origina en el hecho de que los
automóviles avanzan despacio o bien porque se detienen, normalmente porque ocurren
accidentes en las vías. Esto normalmente en las llamadas horas pico, porque los
conductores quieren llegar a tiempo a sus centros de trabajo o a sus domicilios, es decir
hay un flujo grande de vehículos en esas horas pico.
Otra variable importante es la capacidad disponible en las calles para permitir el
paso rápido y continuo de los automóviles.
2.4.2 Modelos de Tránsito.
Existen diversas aproximaciones matemáticas que intentan explicar y modelar el
flujo de tránsito vehicular en términos de alguna de sus características. Todas ellas
Punto x y=3x+2
I -1 -1
II 0 2
III 1 5
IV 2 8
V 3 11
Punto I Punto II Punto III Punto IV Punto V
Angulo Distancia Distancia Distancia Distancia Distancia
0.0 -1.00 0.00 1.00 2.00 3.00
45.0 -1.41 1.41 4.24 7.07 9.90
160.0 0.60 0.68 0.77 0.86 0.94
161.6 0.63 0.63 0.63 0.63 0.63
163.0 0.66 0.58 0.51 0.43 0.35

43
responden con cierto grado de apego a la realidad, midiendo alguna o algunas
características del flujo vehicular.
Existen tres enfoques para modelar flujo de tránsito vehicular:
• Los modelos macroscópicos. Este tipo de modelos se enfocan hacia las
relaciones globales del flujo de tránsito, tales como velocidad de los vehículos,
flujo vehicular y densidad de tránsito. Por su naturaleza, son modelos
continuos, que hacen uso extensivo de ecuaciones diferenciales. Incluye a los
modelos de gases cinéticos y los hidrodinámicos. Dirk Helbing, M. Treiber y
L. A. Pipes son algunos de los investigadores de mayor renombre en esta área.
Dentro de los modelos macroscópicos existen modelos puramente empíricos,
denominados modelos de capacidad y nivel de servicio, que no utilizan la
precisión de las ecuaciones diferenciales y sólo establecen relaciones empíricas
entre las principales variables bajo control del diseñador.
• Los modelos microscópicos se enfocan en la descripción del
comportamiento del flujo del tránsito vehicular mediante la descripción de las
entidades discretas individuales y atómicas que interactúan unas con otras (en
este caso cada vehículo individual). Son modelos por lo general discretos.
Incluye a los modelos de carro siguiente y los modelos con autómatas celulares
(de los cuales los más importantes son los modelos Nagel-Schreckenberg y
Fukui-Ishibashi). Kai Nagel, Michael Schreckenberg, M. Bando, P. G. Gipps,
M. Fukui y Y. Ishibashi son algunos de los mayores investigadores en esta
área.
• Los modelos mesoscópicos (cinéticos) definen una función que expresa
la probabilidad de que un vehículo a determinada velocidad se encuentre en
cierto tiempo en determinada posición. Utilizan por lo general métodos de la
mecánica estadística.
Un ejemplo de los modelos microscópicos es el diseñado por Nagel y
Schrekenberg (Na-Sch) (1992) que modela el tránsito vehicular usando un autómata
celular, donde las células del autómata corresponden a un vehículo que se mueve con
una cierta velocidad v , o a un espacio vacío de la avenida donde se mueve el vehículo.
44
Este modelo es de espacio y tiempo discretos y ha servido para modelar
congestionamientos en autopistas.
Fenómenos del flujo vehicular analizados.
Los fenómenos más importantes que se analizan del flujo de tránsito vehicular,
son:
• Congestión vehicular.
• Cruces en avenidas.
• Uso de semáforos.
• Accidente de tránsito
El primero de ellos y que es uno de los objetivos de este estudio , es el
relacionado con el congestionamiento vehicular (el cual también se le conoce como
embotellamiento) se refiere tanto en el aspecto urbano como interurbano, a la
condición de un flujo vehicular que se ve saturado debido a una sobredemanda de las
arterias viales, lo cual da como resultado que se produzcan incrementos en los tiempos
de viaje y obviamente congestionamientos. Este fenómeno se produce en las llamadas
horas pico, y representan serios problemas y disgustos para los automovilistas, ya que
traen como consecuencia pérdidas de tiempo.
Las consecuencias de las congestiones vehiculares se ven reflejadas en
accidentes, a pesar que los automóviles no pueden circular a gran velocidad, debido a
que el automovilista pierde la calma al encontrarse estático por mucho tiempo en un
lugar de la vía. Esto también deriva en violencia vial, por otro lado reduce la gravedad
de los accidentes ya que los vehículos no se desplazan a una velocidad importante para
ser víctima de daños o lesiones de mayor gravedad. Otra cuestión importante es que los
vehículos gastan innecesariamente combustible debido a que está inactivo por mucho
tiempo en un mismo lugar, sin avanzar en el trayecto de un punto a otro.
Algunas de las maneras para evitar congestiones vehiculares son, el habilitar
modos de pago automatizados cuando la congestión se produce debido a la existencia
de peajes en las rutas, así como la organización de las entradas y salidas en forma
diferida de horas laborales, con la finalidad de que no se produzcan grandes
movilizaciones de automóviles a una misma hora o como lo que sucede cuando se

45
producen retornos masivos de personas que están de vacaciones en un punto de
veraneo a sus ciudades de residencia.
Adicionalmente, hay otro aspecto que se debe tomar muy en cuenta, que son los
hábitos de conducir de la gente, ya que también tiene efectos importantes en el flujo
vehicular.
Todos estos factores que se identifican como causas del flujo lento, deberían ser
considerados en el diseño de modelos que permitan apoyar la solución del problema de
tránsito vehicular, pues es necesario fundamentar la hipótesis de que hay muchos
coches en circulación y resultan insuficientes las calles disponibles para satisfacer las
necesidades de un tránsito fluido.

46
CAPÍTULO 3
DETECCIÓN Y CONTEO DE CAMBIOS DE CARRILES.
3.1 Antecedentes del problema.
Mencionamos en la sección (2.4) que existen una serie de causas de los
congestionamientos viales [29]. En la literatura se encuentran referencias a
investigaciones [40, 54] que se han realizado con el objeto de modelar de una forma lo
más realista posible el comportamiento del tránsito en diferentes situaciones. Una de
las causas que se mencionan es el efecto que tienen los cambios de carriles sobre los
congestionamientos y es causa de análisis en el presente trabajo para medir cuales son
esos efectos sobre las variables consideradas como son flujo, velocidad y densidad.
3.2 Trabajo Relacionado.
Respecto a la detección [51] y clasificación de vehículos [21,22] se ha intentado
a partir de imágenes estáticas; sin embargo, el análisis de los vehículos en movimiento
[14,16,20] presentan un grado de dificultad mayor debido a los detalles adicionales que
hay que tomar en cuenta para establecer una conclusión.
En una intersección o crucero, las vueltas afectan considerablemente el flujo de
tránsito (por ejemplo, reducen la velocidad de tránsito), y subsecuentemente puede
traer como consecuencia la afectación del tránsito en zonas aledañas.
Muchos métodos se han diseñado para la identificación y clasificación de
vehículos [25, 53], ya sea estáticos o en movimiento, bajo distintas condiciones y
enfoques.
En el caso de vehículos con obstrucción, existen algunos métodos que utilizan
información del conocimiento de calibración de cámara y suponen que los vehículos

47
están en el plano del suelo. Proyectan modelos de vehículos 3D simplificados en
imágenes 2D para analizar gradientes de la imagen para detección y clasificación de
vehículos.
Otros métodos usan el perfil 2D para rastrear vehículos en videos aéreos donde
la oclusión entre vehículos no es importante.
En cuanto a obstrucción D. Koller et al [9], S. Kamijo et al [26], F. Oberti et al
[42], utilizan el contorno, puntos característicos y la teoría de campo aleatorio de
Markov [11]. Sin embargo, hacen uso de una región de interés, en la cual los coches
puedan ser identificados separadamente antes de que sean obstruidos.
C.C. Pang et al [44], trabajan en imágenes en primer plano, para detectar
obstrucción y separar vehículos mezclados, pero su método es sensitivo al ruido y no
maneja cambios en la orientación
Existen otros métodos para rastrear el movimiento [23] de manchas sin usar
modelos de perfiles.
I. Cohen et al [7], extraen rastros representando manchas en marcos continuos
como grafos, lo cual ayuda a filtrar mezclas de corto tiempo o partir de las manchas,
pero no puede separar vehículos que están mezclados por largos intervalos tales como
cuando dos vehículos se obstruyen y se mueven juntos.
S. Gupte et al [21], aplican seguimiento a manchas para detección y clasificación
de vehículos pero la mezcla de manchas es la mayor causa de errores de detección y
clasificación en su sistema.
En cuanto al problema de tránsito, en los últimos setenta años se han estado
realizando esfuerzos para contar con mecanismos para el control del tránsito vehicular,
algunos de los modelos se mencionaron en el capítulo dos.
Chowdury et al [6], desarrollan un modelo de tránsito de dos carriles con dos
diferentes tipos de vehículos, los cuales son caracterizados por dos valores diferentes
de la velocidad máxima permitida.

48
Laval y Leclercq [27] desarrollan un modelo microscópico para tratar el
problema de vehículos entrantes a un autopista, en el cual los cambios de carril se
realizan de acuerdo a un proceso estocástico que se valida en el campo y cuyo valor
medio es calculado a partir de una función macroscópica de cambios de carril.
Jia et al [24], proponen un autómata celular para dos carriles y muestran que
cuando un vehículo impide el paso de otro y éste le suena la bocina para que cambie de
carril y le permita el paso no tiene efecto en tránsito homogéneo pero refuerza el flujo
en régimen de densidad intermedio en tránsito heterogéneo.
Chetverusckin et al [5], desarrollan un modelo de congestión de flujos de tránsito
basado en el enfoque continuo y la analogía con los esquemas KCFD (Diferencias
finitas cinéticamente consistentes).
Sven Maerivoet y Bart De Moor [30] desarrollan un análisis retrospectivo de
los modelos de planeación de transporte y los modelos de flujo de tránsito.
Wen-Long Jin [57], aborda la problemática de los cambios de carril desde
diferentes enfoques y presenta una teoría cinemática de la dinámica de los cambios
de carril.
3.3 Justificación.
El origen fundamental de que se haya empezado a abordar este problema surge
de la concurrencia de dos situaciones particulares.
1.- En Junio del 2005, estábamos empezando a trabajar en un proyecto para
medir las características de movimiento de vehículos en el tramo de Cuauhtémoc desde
Constitución hasta Madero, haciendo consideraciones de velocidades y tiempos de los
semáforos. Adicionalmente se pensó en agregar un módulo que midiera los niveles de
contaminación debido a los vehículos. Este proyecto sería mi tesis para obtener el
grado.
Para hacer esto se empezaron a establecer contactos con dependencias
gubernamentales y particulares para la obtención de la información y apoyo necesario
para llevar a cabo el proyecto. Entre éstas se tiene al SINTRAM que es un sistema

49
centralizado para el control de la operación o funcionamiento de semáforos del Área
Metropolitana de Monterrey, el Centro de Calidad Ambiental del Tecnológico de
Monterrey y SIMA (Sistema Integral de Monitoreo Ambiental) encargada de medir los
niveles de contaminación en distintos puntos del área metropolitana de Monterrey;
cabe destacar que esta dependencia proporcionó además información real para la
realización de un proyecto en el curso de Diseño de Experimentos relacionado con ese
tema.
2.- En septiembre del 2005, surge una solicitud al PISIS por parte de otra
dependencia de la UANL, de trabajar en un proyecto para la detección de vehículos en
las intersecciones y contarlos por trayectoria que seguían, pues en ese momento lo
hacían manualmente y los resultados no sentían que fueran confiables. De esa manera,
se vió la posibilidad de enfocar el desarrollo del proyecto ya iniciado hacia la solución
solicitada, ya que se veía como muy afines ambos proyectos.
Una vez que se empezó a trabajar en este segundo proyecto, se fue enfocando
exclusivamente en ese aspecto por lo que se abandonaron las ideas iniciales.
Es así como a partir de entonces se empezó a estructurar este proyecto y a
obtener información sobre el tema, principalmente documentación sobre temas de
visión computacional desde sus orígenes, las diferentes técnicas y modelos
matemáticos que se han implementado para la solución a problemas relacionados con
esta nueva disciplina
3.4 Solución Propuesta.
3.4.1 Condiciones del entorno de los videos.
Como materia prima en la solución del problema se utilizó la información
obtenida a través de los videos, los cuales fueron proporcionados por el SINTRAM en
su mayor parte, y algunos fueron grabados en forma independiente. Es conveniente
resaltar que el medio ambiente influye mucho en la calidad de la grabación, ya que se
genera mucho ruido, dependiendo de las condiciones del medio ambiente, lo cual trae
como consecuencia pérdida en la calidad de las imágenes que se obtienen.
3.4.2 Detección de coches en movimiento.

50
Se diseñó un algoritmo para detectar los coches que se mueven en la escena
bajo estudio, y aislarlos del resto de los objetos presentes en la escena, obteniendo las
manchas correspondientes a los mismos. Esto se hace a través de un método de
segmentación, los cuales se describen en el capítulo dos.
Para la implementación del algoritmo se hace uso de las herramientas
proporcionadas por SIMULINK uno de los módulos de Matlab.
3.4.3 Descripción de la solución propuesta.
La solución propuesta consta de tres partes: una parte manual, que consiste en el
conteo y medición de las variables de interés, lo cual se realiza en forma visual por
medio de los videos grabados de los diferentes sitios seleccionados. En esta parte se
calculan las medias del flujo, la densidad, la velocidad y los cambios de carril, según el
procedimiento siguiente:
Para el cálculo del flujo se cuenta el número de vehículos que pasan por un
punto dado de la avenida en cada minuto, obteniéndose el promedio de todos los
minutos que se tienen grabados.
Para el cálculo de la densidad, se define una región en la escena, calculándose un
tramo de 100 metros; de cada minuto se detiene el video cada 10 segundos y se cuenta
el número de vehículos que permanecen en el tramo de 100 metros bajo consideración;
después se obtiene el promedio de las seis observaciones, obteniéndose la densidad en
ese minuto; posteriormente se obtiene el promedio de la densidad obtenida en todos los
minutos, lo cual constituye la densidad promedio.
Para el cálculo de la velocidad, se selecciona un coche desde el inicio del tramo
bajo observación y se mide el tiempo que tarda en recorrerlo, y se procede a registrar
ese tiempo; posteriormente se selecciona otro vehículo y se procede igual, hasta que se
termina el minuto actual; al final del minuto se calcula el promedio y se obtiene la
velocidad promedio por minuto.
Finalmente se realiza el conteo del número de cambios de carril en cada minuto.

51
Una vez obtenidos los valores de las variables mencionadas, se realizan las
gráficas para analizar las interrelaciones de las variables.
Un punto interesante es verificar qué tanto se cumple la relación que nos dice
que el flujo es igual a la velocidad por la densidad de flujo, lo cual lo hemos verificado
por medio de los datos obtenidos, y se ha aplicado una prueba F [37, 38, 52] para
determinar si estadísticamente es válido.
Otra parte de la solución propuesta es la obtención de los valores de las variables
en forma automática. Para ello, se desarrolló un modelo en Simulink, utilizando las
herramientas con las que cuenta para el procesamiento de imágenes a través de
bloques.
El problema con el modelo es que los videos con los que se cuenta tienen mucho
ruido del medio ambiente, de tal manera que detecta manchas en movimiento que no
corresponden a los vehículos que se están moviendo y los resultados obtenidos no son
tan exactos como nosotros esperábamos; un área de oportunidad para el futuro es el
desarrollo de algoritmos y técnicas que permitan detectar con exactitud las manchas de
los coches y haya un mínimo porcentaje de falsos positivos.
La tercera parte de la solución es el empleo de un simulador que genere los
coches en movimiento, se almacene como un video y esto sirva como entrada al
modelo; la idea es verificar que el modelo está funcionando en forma correcta y que en
la medida que se tenga una grabación de buena calidad, nos va a generar resultados
correctos y deben ser los mismos o muy aproximados a los que se obtengan
manualmente por observación de los videos.
En el apéndice C se muestra el modelo para la detección automática desarrollado
en Simulink.
Para el caso del simulador, se desarrolló un programa en Java para generar
coches en forma aleatoria, utilizando una distribución Poisson en diferentes carriles.
Esto permite contar con un experimento controlado donde sea posible obtener los datos
del número de coches generados, la velocidad de los coches, calcular la densidad
promedio y los cambios de carriles.

52
El mecanismo consiste en generar un video a partir de las pantallas donde van
apareciendo las cajas que representan los coches que se van generando a través del
simulador, y posteriormente ese video sirva de entrada al modelo en Simulink para ver
si arroja los mismos valores que nos da el programa simulador.
53
CAPÍTULO 4
EXPERIMENTOS. 4.1 Análisis por conteo manual.
A partir de las secuencias de videos, se realizó la recopilación de los valores de
las variables por cada minuto de grabación que se tiene en los videos, para lo cual se
efectuó un conteo visual del número de coches que pasan por los tramos considerados
en las avenidas seleccionadas para hacer el estudio. Los estudios que se presentan
corresponden a grabaciones realizadas en Constitución a la altura de la Avenida
Gonzalitos en la orientación al Poniente-Oriente, Constitución a la altura de
Venustiano Carranza y el túnel de la Loma Larga en dirección Oriente-Poniente y la
Avenida José Eleuterio González (Gonzalitos) en la dirección Norte-Sur entre la
Avenida Pablo González y Boulevard Constitución, este último a una hora pico.
Es conveniente mencionar que también se recopiló una grabación de
Cuauhtémoc a la altura de Juan Ignacio Ramón, y no se analizó debido a que la escena
estaba muy deficiente para realizar el conteo de vehículos. La figura 4.1 muestra una
escena de la avenida mencionada donde se puede apreciar que la escena no es muy
apropiada para el objetivo que se busca de realizar un análisis visual del
comportamiento del tránsito vehicular.
También es conveniente señalar que los videos también pasaron por un proceso
de conversión del formato de video a formato digital para poder ser leído y procesado
por la computadora; particularmente por el programa Matlab y el módulo Simulink,
que fueron utilizados en el desarrollo de programas para el procesamiento de los
videos una vez que fueron digitalizados.
El proceso de conversión a formato digital implica también una considerable
inversión de tiempo por los programas que lo realizan, para lo cual también fue

54
necesario buscar programas que efectuaran este tipo de tareas para contar con la
misma información en el formato apropiado para ser leídos desde Matlab y Simulink.
4.1.1 Resultados del análisis del tramo de Constitución a la altura de Gonzalitos, dirección Puente Atirantado a Monterrey.
Inicialmente se realizó el estudio del tramo de Constitución cruzando la avenida
José Eleuterio González, comúnmente conocida como Gonzalitos, pasando el puente
se consideró un tramo de cien metros en la escena. La Figura 4.2 muestra un escena de
ese sector. Aún en estas escenas no se contaba con la suficiente calidad para su
procesamiento en forma automatizada.
Figura 4.1 Escena de la muestra tomada de Cuauhtémoc y Juan
IgnacioRamón

55
Figura 4.2 Vista del tramo de Constitución a la altura de Gonzalitos.
Los resultados del conteo de flujo vehicular en intervalos de un minuto se
muestran en la figura 4.3:

56
Figura 4.3. Comportamiento del flujo vehicular en intervalos de un minuto.
El análisis de los datos nos conduce al valor de flujo promedio en el tramo
considerado de Constitución y Gonzalitos que es de 40 coches por minuto, así como
los valores de las variables consideradas en el diagrama fundamental de la teoría del
tránsito.
Este análisis consistió en realizar un conteo por períodos de un minuto , en el
cual se midió el flujo (q ), la velocidad (v ) y la densidad de tránsito ( ρ ), cantidades
que definimos de la siguiente manera:
Flujo vs Tiempo
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120 140
Minutos
Flu
jo

57
El flujo de tránsito ( q ) se define como el número de vehículos que pasan por
un punto dado de la avenida en cierta unidad de tiempo, en nuestro estudio un minuto,
por lo cual tenemos que q estaría dado por
Número de vehículos/Tiempo promedio=τ
n (4.1)
La velocidad promediov se calcula en forma normal, tomando la longitud del
tramo bajo consideración y el tiempo promedio que tardan los vehículos en recorrer el
tramo, de donde tenemos la ecuación
Velocidad promedio =τ
λ (4.2)
Respecto a la densidad de tránsito ρ la cual se calcula como el número promedio
de vehículos en un instante dado en el tramo bajo análisis dividido por la longitud del
tramo, tenemos la siguiente igualdad:
Número de vehículos/distancia considerada=λ
n (4.3)
De estas relaciones se obtiene una nueva relación
v =ρ
q (4.4)
o bien ρvq = , es decir, el flujo de vehículos está dado por el producto de la
velocidad promedio y la densidad de tránsito, tal y como lo enuncia la teoría del
tránsito.
Las cantidades físicas mencionadas (velocidad, flujo y densidad) son utilizadas
en la teoría de tránsito, desde el punto de vista macroscópico.
Respecto al procedimiento para la recopilación de los datos, el método de conteo
empleado fue el siguiente:
Para el flujo: Se definió una línea transversal en un tramo de la carretera que
sirvió como referencia para realizar el conteo, los vehículos que cruzaban esa línea
fueron contados durante un intervalo de un minuto y se anota, en el siguiente minuto

58
empieza de nuevo el conteo hasta que se termina el archivo; esto se realizó en cada
uno de los cinco archivos disponibles de aproximadamente treinta minutos cada uno.
De esta manera al final se obtiene el flujo promedio por minuto, considerando el total
de observaciones hechas en cada minuto.
Para medir la velocidad, se consideró el punto de inicio del tramo y el punto
donde finaliza. En cada inicio de minuto se seleccionó un vehículo y se le dio
seguimiento hasta que llegaba al punto final del tramo, midiendo el tiempo que tardaba
en recorrer dichos puntos. Esto haciendo un muestreo de entre cuatro y seis vehículos
por minuto. Finalmente se obtiene el tiempo promedio por vehículo para recorrer el
tramo y de ahí se calcula la velocidad promedio en ese tramo de cien metros.
En el caso de la densidad de flujo, se utilizó un procedimiento similar, de cada
intervalo considerado se detenía el video cada diez segundos y se contó cuántos
vehículos quedaban en la imagen dentro del tramo bajo observación, de esta manera se
tiene un muestreo muy aceptable en cada minuto del intervalo bajo estudio. De igual
forma que las otras dos variables, se obtiene un promedio del número de vehículos que
hay en ese tramo en cada minuto considerado.
De acuerdo a los datos recopilados siguiendo los procedimientos antes
descritos, se obtuvieron las siguientes gráficas.
La Figura 4.4 presenta la gráfica que representa la relación entre la densidad de
tránsito y el flujo; aquí podemos constatar lo predicho por la teoría de tránsito que a
densidades bajas hay una correlación entre el flujo y la densidad, lo cual no ocurre a
medida que aumenta la densidad.
En esta gráfica se ha dibujado la línea de tendencia en la nube de puntos
ubicada en el lado izquierdo de la gráfica, que corresponden a valores de densidad de 2
a 5 así como en los puntos dispersos en el lado derecho, que corresponde a valores de
la densidad de 6 a 12, Podemos observar que efectivamente, el flujo tiende a aumentar
a medida que aumenta la densidad, pero también observamos que a medida que la
densidad aumenta más es correlación se pierde y el flujo tiende a bajar.

59
0
10
20
30
40
50
60
- 2.00 4.00 6.00 8.00 10.00 12.00 14.00
Densidad
Flu
jo
Figura 4.4 Gráfica que muestra valores del flujo observado contra los
valores observados de la densidad
No obstante, la gráfica anterior nos permite verificar otras afirmaciones de la
teoría de tránsito [17]: 1°) que cuando la densidad de flujo es cero el flujo es cero, lo
cual indica que no hay coches en la vía; 2.-) que al aumentar la densidad, aumenta el
flujo hasta llegar a cierto valor en el que el flujo empieza a disminuir; 3.-) Al llegar la
densidad a un valor, denominado densidad de congestionamiento, el flujo es cero. La
geometría de la situación descrita se muestra en la Figura 4.5.

60
0
20
40
60
80
100
120
0 5 10 15 20 25
densidad
flu
jo
Figura 4.5 Gráfica de la Geometría del comportamiento del flujo contra densidad,
según la teoría de tránsito.
La figura 4.6 muestra la gráfica del comportamiento de la densidad de tránsito
y el flujo en el tiempo. El eje principal muestra la densidad de flujo y el eje secundario,
lado derecho, muestra el flujo.
0
2
4
6
8
10
12
14
1:44
1:00
2:05
2:10
3:00
3:05
3:10
3:15
3:20
4:04
4:09
4:14
5:01
5:06
de
ns
ida
d
0
10
20
30
40
50
60
flu
jo
densidad flujo
Figura 4.6. Gráfica que muestra el comportamiento de la densidad y el flujo.
La grafica que se muestra en la Figura 4.6 presenta el comportamiento de la
densidad de tránsito y el flujo en el tiempo, observándose como están correlacionadas

61
en el transcurso del tiempo. El eje del lado izquierdo presenta la densidad y el eje
secundario, del lado derecho, presenta el flujo.
Otro de los aspectos interesantes que se encontró en este estudio es que la
relación (4.4) velocidad, flujo y densidad, vemos que experimentalmente se satisface
como se muestra en la tabla 4.1.
Tabla 4.1 Observaciones preliminares del estudio.
Grupos de v q v ρ ρ
Densidad ( ρ )
Observaciones Tiempo (seg.)
M/seg. Vehículos
Prom. (Vehí/tramo) (Vehi/m)
1 5.76 17.35 33 56 5.4 0.054 2 5.64 17.74 34 39 3.6 0.036 3 5.80 17.24 34 39 3.8 0.038 4 5.51 18.15 32 37 3.4 0.034 5 5.05 19.81 33 38 3.2 0.032 6 5.21 19.19 37 40 3.4 0.035
En esta tabla se muestra el conteo visual del tránsito de acuerdo al mecanismo
que se describió anteriormente, y el resultado de aplicar la ecuación (4.4), ρvq = ,
donde se verifica que, excepto en el primer renglón, los resultados son muy similares.
Hacemos la aclaración que hay una diferencia grande en el primer renglón debido a
que el cálculo de la densidad en ese caso se hizo en intervalos de un minuto mientras
que en el resto de los renglones el intervalo fue de diez segundos.
Para asegurar estadísticamente que se cumple la relación (4.4) respecto a que el
flujo calculado es igual al producto de la velocidad promedio calculada y la densidad
promedio calculada, se aplicó la prueba F a los datos de la tabla correspondientes al
flujo observado y al flujo calculado con la relación (4.4), obteniéndose los siguientes
resultados:
Varianza del flujo observado: 3.5
Varianza del flujo calculado con la fórmula: 1.3

62
Valor del cociente de las varianzas, considerando el numerador como la
varianza mayor: 2.69 (Fprueba).
La hipótesis nula H0: las varianzas son iguales, se rechazaría si Fprueba es menor
que F(.025,4,4) o Fprueba es mayor que F(.975,4,4). Los valores que arroja la tabla
Fisher son: F(.025,4,4) = 9.60 y F(.975,4,4)=0.104.
De acuerdo con esto, puesto que Fprueba no es menor que F(.025,4,4) ni mayor
que F(0.975,4,4), entonces se concluye que no hay evidencia suficiente para rechazar
la hipótesis nula.
También se hace la aclaración de que el cálculo se hizo considerando sólo cuatro
grados de libertad, debido a que no se consideró el primer renglón de la tabla por
haberse obtenido bajo condiciones experimentales diferentes.
En este primer análisis de los resultados del tramo Constitución y Gonzalitos, se
ha observado un tránsito estable, con aumentos en el flujo en forma periódica, pero la
velocidad promedio de los vehículos no tiene mucha variación, por lo que concluímos
que en esta parte no hay problemas de congestionamientos ni bloqueos. Sin embargo,
hemos tenido la oportunidad de verificar algunas de las predicciones de la teoría de
tránsito, lo cual nos permite a partir de estos resultados, tener los fundamentos teóricos
para continuar adelante en el estudio de los próximos tramos de la vía objeto del
análisis.
Otros puntos interesantes a considerar serían los tramos de Constitución, a la
altura de Venustiano Carranza, el tramo comprendido de Constituyentes del 57 hasta
Felix U. Gómez, en la parte de Oriente a Poniente, pues se ha observado que en esa
parte se forman muchos congestionamientos, generándose densidades muy altas y flujo
pequeño, muchas veces debido al ingreso de vehículos que se incorporan a
Constitución, cambios de carril , generación de percances debido al congestionamiento
, a la impericia en el manejo o a la desesperación de los conductores.
Asimismo, puntos también interesantes son otras vías de comunicación en el que
se observan problemas de tránsito, entre las que podríamos considerar Morones Prieto
en su intersección con León Guzmán, Gonzalitos entre Fidel Velásquez y Constitución

63
en ambos sentidos. Otras avenidas podrían ser Cuauhtémoc desde Ocampo hasta
Madero, Pino Suárez desde Madero hasta Ocampo, Nogalar desde Félix U. Gómez
hasta Avenida Universidad, Félix U. Gómez desde Colón hasta Ruiz Cortines.
En todas estas avenidas se observan embotellamientos en las horas pico y
muchas veces, incluso en horas que no son pico.
Los resultados de estos análisis permitirán establecer relaciones entre los
distintas rutas y poder predecir a través de un modelo el comportamiento del tránsito
en horas posteriores, dadas las condiciones actuales en los distintos rumbos.
4.1.2 Análisis del Tramo Constitución-Venustiano Carranza a la altura de la Loma Larga.
Figura 4.7 Tramo de Constitución y Venustiano Carranza.
Esta metodología se aplicó al tramo de Constitución a la altura de Venustiano
Carranza (figura 4.7), particularmente en la parte correspondiente a la subida del
puente a la altura del túnel de la Loma Larga, obteniéndose los siguientes resultados.
En la figura 4.8 se muestra el comportamiento de la densidad y el flujo en el
tiempo, observándose un comportamiento similar a lo observado en el análisis anterior.

64
En la figura 4.9 observamos la gráfica densidad vs flujo. Los datos recopilados
no nos permiten ver qué sucede a densidades altas, en la cual el flujo decrece a partir
de la densidad de embotellamiento, según lo predice la teoría del tránsito.También se
debe resaltar el hecho de que el flujo y las densidades observadas son altas.
En la figura 4.10 se agrega una variable adicional bajo estudio, como lo es el
cambio de carril. Esta gráfica presenta el comportamiento del flujo de tránsito frente a
los cambios de carril. Se observa una tendencia del flujo a aumentar, al aumentar los
cambios de carril.
Figura 4.8 En esta gráfica se muestra el comportamiento de las variables densidad y flujo frente al tiempo, tramo Constitución Venustiano carranza.
En la figura 4.11 se presenta el comportamiento de la densidad contra los
cambios de carriles. De la misma manera que el flujo, la densidad tiende a aumentar,
esto de manera lógica por la correlación existente entre el flujo y la densidad.
Finalmente en la figura 4.12 se muestra el comportamiento de la velocidad frente
a los cambios de carril.
Densidad y flujo vs tiempo
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
0 20 40 60 80 100 120
Minutos
Den
sid
ad
0
20
40
60
80
100
120
140
160
180
Flu
jo

65
Figura 4.9.- Gráfica que muestra cómo el flujo de tránsito aumenta al aumentar la
densidad de tránsito.
Figura 4.10 Comportamiento de flujo vs cambios de carril.
Tramo Constitución-V.Carranza
0
20
40
60
80
100
120
140
160
180
0.00 5.00 10.00 15.00
Densidad
Flu
jo
Cambios de carril vs flujo
0
20
40
60
80
100
120
140
160
180
0 2 4 6 8 10 12 14 16
Cambios de carril
Flu
jo

66
Cambios de carril vs densidad
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
0 2 4 6 8 10 12 14 16
Cambios de carril
Den
sid
ad
.
Figura 4.11 Comportamiento de la densidad frente a los cambios de carril
Cambios de carril vs velocidad
0.00
5.00
10.00
15.00
20.00
25.00
0 2 4 6 8 10 12 14 16
Cambios de carril
Ve
locid
ad
(m/s
)
Figura 4.12 Comportamiento de la velocidad frente a los cambios de carril

67
Otro análisis que se efectuó es la prueba estadística F para verificar que el
flujo observado es igual al producto de la velocidad por la densidad, obteniéndose que
efectivamente podemos afirmar que provienen de la misma población , de acuerdo a
los siguientes resultados.
La varianza del flujo observado es 391.31
La varianza del flujo calculado por la fórmula es 301.21
El valor del cociente 391.31/301.21 es 1.299
F.025,98,98=1.489
F.975,98,98=0.671
De donde concluímos que puesto que el valor del cociente no es menor que
0.671 ni mayor que 1.489, entonces no tenemos evidencia para rechazar la hipótesis
nula de que las muestras provienen de la misma población.
De acuerdo con este análisis estaremos en posibilidad de verificar los resultados
que se obtengan contra lo que predice la teoría de tránsito lo cual debe ser congruente.
Otro conteo visual que se presenta el de los cambios de carril en esos tramos que
se observen para las velocidades, flujo y las densidades promedio.
Se presentó el análisis del comportamiento de la velocidad y la densidad cuando
se producen cambios de carril en la avenida, de manera que es necesario realizar el
conteo visual de los cambios de carril que ocurran en los tramos en los que se observe
las velocidades y las densidades promedio, para poder establecer las relaciones de
causa-efecto entre las 3 variables.
4.1.3 Análisis de la avenida José Eleuterio González(Gonzalitos).
Se realizó el análisis del comportamiento vehicular en un tramo de Gonzalitos
entre la Avenida Pablo González y Constitución a una hora pico, de 7 pm. a 8 pm.,
aproximadamente, obteniéndose los resultados que enseguida se presentan.

68
Figura 4.13 Tránsito vehicular en Gonzalitos.
Como es de esperarse, el comportamiento vehicular es diferente en una hora
pico, ya que los valores del flujo y densidad son altos mientras que la velocidad
disminuye.
En esta parte se presentan los resultados de comparar los cambios de carriles
contra las variables velocidad, densidad y flujo.
La figura 4.14 muestra el flujo y la densidad frente al tiempo a medida que
transcurre la grabación. Se observa un comportamiento similar en ambas variables a
medida que transcurre el tiempo.
En la figura 4.15 se observa una tendencia a disminuir el flujo a medida que la
densidad aumenta, Esto es cierto pues como afirma la teoría de tránsito [6, 17] a
medida que aumenta la densidad aumenta el flujo, pero a valores altos de la densidad,
como es el caso que se está analizando (una hora pico), el flujo empieza a disminuir, de
hecho puede llegar a ser cero, es decir no hay avance de coches, pues se pasa a un
estado de bloqueo o congestionamiento.

69
En la figura 4.16 se muestra la gráfica densidad contra velocidad; aquí
observamos nuevamente una tendencia a la baja medida que crece la densidad, es
decir los coches tienden a ir cada vez más lentos y la densidad va creciendo
precisamente porque tienden a permanecer en el mismo lugar de la avenida.
La figura 4.17 muestra el comportamiento del flujo frente a los cambios de
carril; en esta gráfica se observa que al incrementarse el número de cambios de carril
hay una tendencia a aumentar el flujo, como es de esperarse pues los cambios de carril
se generan por la necesidad de los conductores a avanzar más rápido por lo que al
cambiar de carril dejan un espacio que es ocupado por el que está atrás de él.
La figura 4.18 muestra la gráfica de cambio de carril contra densidad de flujo. Se
observa una ligera tendencia a disminuir, esto es debido a que al cambiar de carril, hay
un desplazamiento más rápido de los coches tanto los que cambian de carril como de
los que los vienen detrás de ellos, por lo que la densidad tiende a disminuir, aunque
muy ligeramente.
La figura 4.19 muestra la relación cambios de carril vs. velocidad; la gráfica
muestra una tendencia a aumentar la velocidad, dado que al cambiar de carril es
necesario incrementar la velocidad, lo cual trae como consecuencia que la velocidad
promedio observada se incremente también.
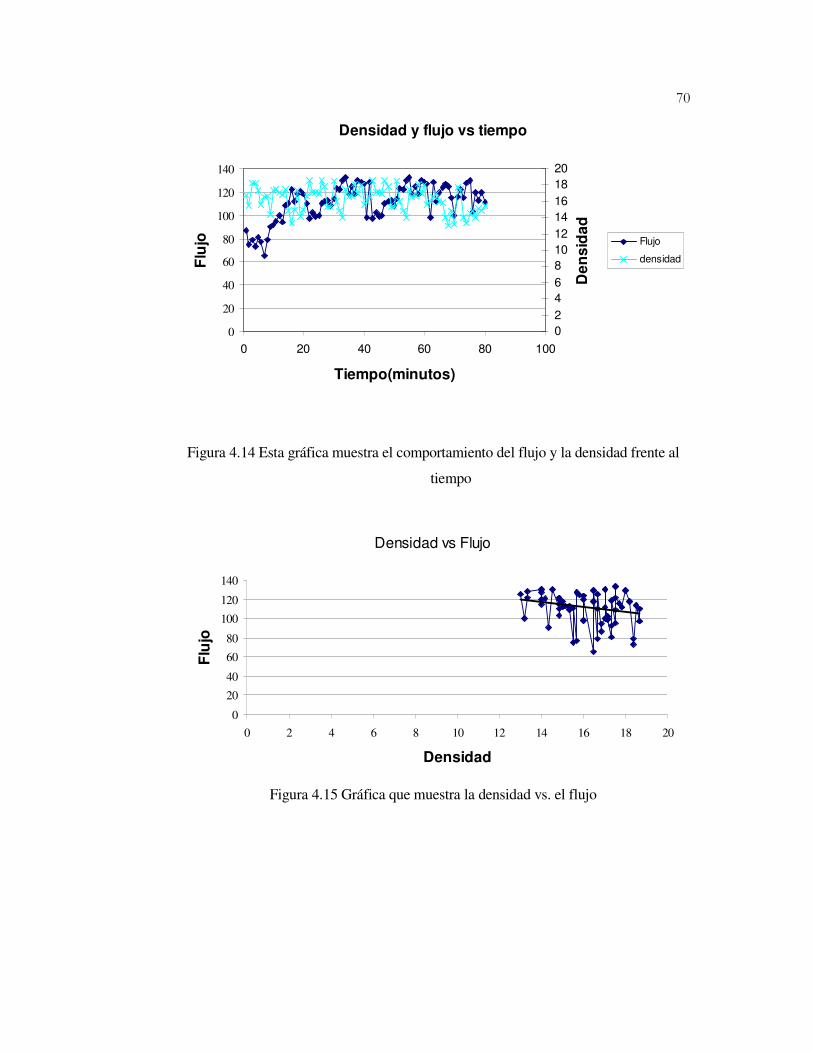
70
Figura 4.14 Esta gráfica muestra el comportamiento del flujo y la densidad frente al
tiempo
Figura 4.15 Gráfica que muestra la densidad vs. el flujo
Densidad y flujo vs tiempo
0
20
40
60
80
100
120
140
0 20 40 60 80 100
Tiempo(minutos)
Flu
jo
0
2
4
6
8
10
12
14
16
18
20
De
ns
ida
d
Flujo
densidad
Densidad vs Flujo
0
20
40
60
80
100
120
140
0 2 4 6 8 10 12 14 16 18 20
Densidad
Flu
jo

71
Figura 4.16 Gráfica que muestra como la velocidad va disminuyendo a medida que la
densidad crece.
Figura 4.17 Los cambios de carril favorecen el aumento del flujo, como se muestra en la
gráfica
Densidad Vs Velocidad
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
0 5 10 15 20
Densidad
Velo
cid
ad
Cambios de carril vs flujo
0
20
40
60
80
100
120
140
0 5 10 15 20 25
Cambios de Carril
Flu
jo

72
Cambios de carril vs densidad
0
5
10
15
20
0 5 10 15 20 25
Cambios de carril
De
nsid
ad
Figura 4.18 Gráfica donde se muestra como se comporta la densidad con los cambios de carril.
Cambios de carril vs velocidad
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
0 5 10 15 20 25
Cambios de carril
Ve
loc
idad
Figura 4.19 Gráfica donde se muestra el efecto de los cambios de carril sobre la velocidad.
Finalmente, en este análisis también se realizó la prueba F para verificar que el
flujo puede calcularse a partir de la ecuación (4.4). Los resultados que se obtuvieron
muestran que los valores observados y los calculados mediante la ecuación provienen
de la misma población.
Varianza de los datos observados: 253

73
Varianza de los datos calculados: 230.4
Fprueba (cociente 253/230.4): 1.10
F.025,78,78=1.56
F.975,78,78=0.639
Y dado que el valor del cociente Fprueba no está en la región de rechazo de la
hipótesis nula, no se rechaza esta hipótesis, de que provienen de la misma población.

74
CAPÍTULO 5
CONCLUSIONES. 5.1 Resultados.
El análisis de la información obtenida a partir de los videos nos ha permitido
contar con los parámetros que caracterizan el flujo de vehículos en ciertos puntos
específicos del Boulevard Constitución; esto nos permite, por una parte conocer el
comportamiento del tránsito vehicular a lo largo de esa avenida; por otro lado es
importante destacar que el estudio del comportamiento del tránsito vehicular ha sido
objeto de estudio de investigadores interesados en el tema en los últimos setenta años,
que es la época de crecimiento de la industria automotriz; en este lapso de tiempo, se
ha establecido una teoría que trata de explicar desde distintos enfoques y a través de
modelos el comportamiento del tránsito de vehículos; esta teoría es la llamada “Teoría
del Tránsito”, la cual fundamentalmente hace uso de las variables que hemos utilizado
en nuestro experimento: el flujo de vehículos, la densidad del tránsito y la velocidad
promedio.
Asimismo, esta investigación se ha enfocado a verificar la validez experimental
de la “teoría del tránsito” en algunos tramos de la avenida Constitución, por
considerarse muy representativa del comportamiento del tránsito en Monterrey.
Como se presentó en el análisis, se han obtenido las gráficas que muestran las
relaciones entre las diferentes variables bajo consideración, como son flujo contra
densidad, densidad y flujo contra tiempo, así como el comportamiento de la densidad y
el flujo a través del tiempo, todo esto como resultado de los experimentos realizados.
Asimismo, hemos caracterizado el movimiento vehículos por medio de una
variable adicional, los cambios de carril, en el que recientemente se han realizado
investigaciones [6] en diferentes tipos de modelos para saber cual es su influencia en el
comportamiento del tránsito vehicular.

75
Por otro lado, hemos verificado la validez de la ecuación de la teoría de
tránsito, en la que se establece que hay una relación directa entre el flujo y el producto
de la densidad y la velocidad; la teoría del tránsito afirma que a ciertas densidades esta
relación es válida, como lo podemos constatar en la gráfica 4.2. Observamos en la
gráfica que hay un valor de la densidad en la que la relación se pierde; este valor en
nuestro experimento está alrededor de seis; sin embargo, hay evidencia [17], que este
valor debe ser alrededor de 25. Debemos hacer notar que nuestro análisis está basado
en observaciones de algunas horas del día; los tiempos de observación utilizados en
otros experimentos es de un mes, e incluso hasta varios meses con tramos de vía más
grandes [48]; sin embargo, hemos observado que los resultados obtenidos tienden
estadísticamente a los mismos valores.
5.2 Trabajo futuro.
De este proyecto de investigación aún hay mucho trabajo por hacer, pues se
quedan como parte del proyecto la realización de experimentos adicionales aplicando
la metodología presentada en otros puntos del área metropolitana, donde las
condiciones del medio ambiente podrían ser más difíciles, lo cual dificultaría aún más
la parte de la detección automática en lo referente al análisis del tránsito. Otro tema de
investigación, sería analizar la interrelación entre puntos aledaños del área
metropolitana y ver el comportamiento de las variables bajo estudio y como influyen
entre sí.
La validación del modelo mediante el simulador de tránsito vehicular es otro de
los puntos que quedan en espera para saber si el modelo desarrollado en Simulink está
operando correctamente.
Por el lado de la visión computacional, es necesario mejorar el modelo de
detección de coches en movimiento, a través del uso de tecnologías de procesamiento
de imágenes más adecuadas y el diseño de algoritmos que permitan hacer eficiente el
proceso de detección de las manchas de interés y eliminar las manchas que nos
producen falsos positivos.
También por el lado de la visión computacional, es de interés poder identificar
no sólo el movimiento del vehículo, sino también poder clasificar el tipo de vehículo,

76
que es una tarea todavía más difícil; adicionalmente ser capaz de identificar
características del vehículo, así como detección de placas. Esto permitiría en un
momento dado, darle seguimiento a través de la red de cámaras instaladas en puntos
estratégicos de la ciudad, y se estará en posibilidad de ubicar algún vehículo de interés
para las autoridades.
77
APÉNDICE A.- SINTRAM
El SINTRAM (SISTEMA INTEGRAL DE TRANSITO METROPOLITANO,
es un sistema formado por 547 intersecciones sincronizadas en red cuya objetivo
principal es otorgar fluidez al tránsito vehicular, dicho sistema inicia sus operaciones
formalmente en el año 2001 y tiene cobertura sobre 7 municipios del Área
Metropolitana de Monterrey.
Cuenta con dos sistemas auxiliares uno formado por 20 cámaras que monitorean
los principales puntos de la ciudad y otro de 20 paneles electrónicos para dar
información a los conductores.
Participación Municipal:
La tabla A.1 muestra la información por municipio en lo que se refiere al número
de cruceros con semáforos, cruceros centralizados en el sistema SINTRAM, así como
su porcentaje de participación en el sistema SINTRAM.

78
Tabla A.1
MUNICIPIOS
CRUCERO CON
SEMÁFOROS
CRUCEROS
CENTRALIZADOS
PORCENTAJES DE
PARTICIPACIÓN
MONTERREY 570 363 66.36%
GUADALUPE 87 59 10.79%
SAN NICOLAS 87 57 10.42%
SAN PEDRO 58 46 8.41%
SANTA CATARINA
14 10 1.83%
ESCOBEDO 8 8 1.46%
APODACA 5 4 0.73%
TOTAL 829 547 100%
Para el funcionamiento más completo del sistema cuenta con otros elementos de
apoyo, como son los cruceros centralizados, las cámaras de video y los paneles
dinámicos, los cuales han permitido estructurar el sistema integral de monitoreo, como
se muestra en la tabla A.2.
Podemos observar que el municipio de Monterrey actualmente participa en el
sistema SINTRAM con 363 cruceros de un total de 547. También cuenta con 12
paneles informativos y 12 cámaras de monitoreo.

79
Tabla A.2.- Elementos de apoyo
MUNICIPIOS CRUCEROS CENTRALIZADOS
CÁMARAS DE
VIDEO
PANELES DINAMICOS
MONTERREY 363
12 12
GUADALUPE 59 2 2
SAN NICOLAS 57 2 2
SAN PEDRO 46 2 2
SANTA CATARINA
10 1 1
ESCOBEDO 8 1 1
APODACA 4 0 0
TOTAL 547 20 20
FUNCIONAMIENTO
El sistema está diseñado para proporcionar el tiempo de verde en los semáforos
necesario para cada rama de una intersección, para lo cual toma en cuenta el volumen
de tránsito vehicular y sus características y reparte el tiempo de ciclo restante según
comportamiento del tránsito en cada momento.
Para lograr este propósito, el sistema hace uso de una serie de detectores que
cada segundo envían información a una computadora central del comportamiento de la
vialidad, los volúmenes de tránsito vehiculares, la formación de filas de vehículos y el
intervalo vehicular.
Esta información le permite al sistema determinar en intervalos de segundos en
forma automática qué luces deben estar en verde y cuales no.
TECNOLOGÍA SINTRAM COMPONENTES.
La tabla A.3 muestra los componentes con los que cuenta el sistema, así como el
número que determina la cantidad o la longitud de cada uno de ellos.
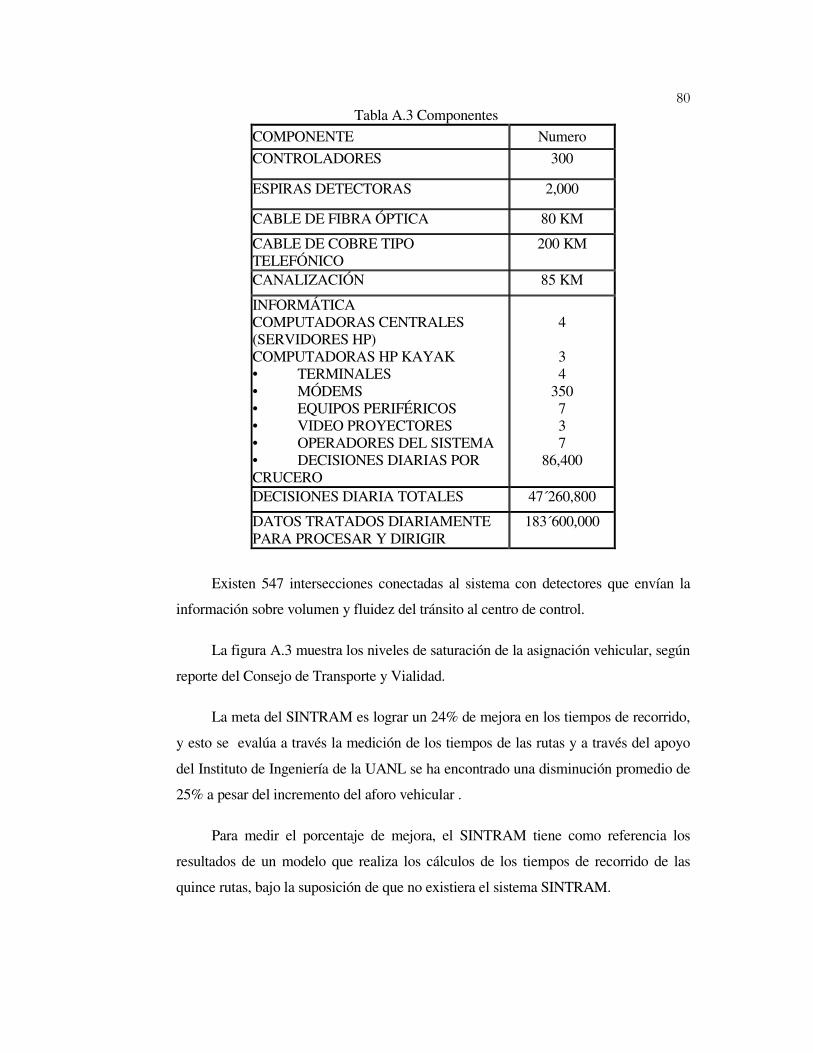
80
Tabla A.3 Componentes
COMPONENTE Numero
CONTROLADORES 300
ESPIRAS DETECTORAS 2,000
CABLE DE FIBRA ÓPTICA 80 KM
CABLE DE COBRE TIPO TELEFÓNICO
200 KM
CANALIZACIÓN 85 KM
INFORMÁTICA COMPUTADORAS CENTRALES (SERVIDORES HP) COMPUTADORAS HP KAYAK • TERMINALES • MÓDEMS • EQUIPOS PERIFÉRICOS • VIDEO PROYECTORES • OPERADORES DEL SISTEMA • DECISIONES DIARIAS POR CRUCERO
4 3 4
350 7 3 7
86,400
DECISIONES DIARIA TOTALES 47´260,800
DATOS TRATADOS DIARIAMENTE PARA PROCESAR Y DIRIGIR
183´600,000
Existen 547 intersecciones conectadas al sistema con detectores que envían la
información sobre volumen y fluidez del tránsito al centro de control.
La figura A.3 muestra los niveles de saturación de la asignación vehicular, según
reporte del Consejo de Transporte y Vialidad.
La meta del SINTRAM es lograr un 24% de mejora en los tiempos de recorrido,
y esto se evalúa a través la medición de los tiempos de las rutas y a través del apoyo
del Instituto de Ingeniería de la UANL se ha encontrado una disminución promedio de
25% a pesar del incremento del aforo vehicular .
Para medir el porcentaje de mejora, el SINTRAM tiene como referencia los
resultados de un modelo que realiza los cálculos de los tiempos de recorrido de las
quince rutas, bajo la suposición de que no existiera el sistema SINTRAM.

81
Figura A.3 Niveles de saturación.
En la figura A.4 se muestra la ubicación de los componentes del sistema en el
área metropolitana de Monterrey.
Figura A.4 Cobertura del SINTRAM

82
APÉNDICE B. Código
En este apéndice se presenta el código más importante desarrollado en Matlab para
el procesamiento de las imágenes. Se aclara que finalmente se utilizaron las facilidades de
Simulink para el desarrollo del modelo.
Programa para convertir las imágenes con estructura de video en formato avi a arreglos tridimensionales, donde cada plano contiene un fotograma.
clear all tic readerobj = mmreader('D:\SINTRAM2.avi'); %Lee los fotogramas en el video. vidFrames = read(readerobj,[1 200]); %Determina el número de fotogramas en el video. numFrames = get(readerobj, 'NumberOfFrames'); %Create a MATLAB movie struct from the video frames. for k = 1 : 200 mov = vidFrames(:,:,:,k); K(:,:,k)=rgb2gray(mov); end toc Programa para generar la caja limitante (bounding box), a partir de la
información proporcionada por Matlab en el campo BoundingBox de la estructura de datos.
imshow(I); hold on; for i=1:numObjects z(i,:)=graindata(i).BoundingBox; end for i=1:numObjects plot([z(i,1) z(i,1)+z(i,3) z(i,1)+z(i,3) z(i,1) z(i,1)],[z(i,2) z(i,2) z(i,2)+z(i,4)
z(i,2)+z(i,4) z(i,2)]) hold on end %programa para % leer del video los frames % quitar el background % checar pixel por pixel para poner o o 1 dependiendo si es background o

83
% foreground tic tiempoinicial=cputime close all, imtool close all %lee y despliega la imagen en escala de grises frame=1 for frame=1:45 M(:,:,frame)=imread(cat(2,'D:\USB
Shikatroniks\Movehi2\bad_0',num2str(frame,'%02d'),'.gif')); end t=cputime media=mean(M,3); cputime-t figure,imshow(uint8(media)), title ('esta es la media de todos los frames'); % pixeles correspondientes en 0,1 %Mstd=std(double(M),0,3); %C=zeros(512,512); Resta=imsubtract(M(:,:,1),uint8(media)); mediaframe=mean(mean(M(:,:,1))) desvst=std(std(double(M(:,:,1)))) CC=(Resta>(mediaframe*.75)); Matriz=Resta.*uint8(CC); figure,imshow(Matriz) toc %for I=1:512 % for J=1:512 % suma=0; % for k=1:45 % suma=suma+(M(I,J,k)-media(I,J))^2; % end % if M(I,J,1)>=(media(I,J)+ Mstd(I,J)) C(I,J)=M(I,J,1); % end % I,J % end %end %figure,imshow(C) cputime-tiempoinicial toc
Programa para probar los resultados de los diferentes tipos de filtros,
disponibles para el procesamiento de las imágenes.
frame=1 for frame=1:45

84
M(:,:,frame)=imread(cat(2,'C:\Proyecto de Tesis\Movehi\dt_00',num2str(frame,'%02d'),'.gif'));
end I=M(:,:,1); Imed33=medfilt2(I,[9 9]); figure, imshow(Imed33),title('filtro medfilt2 con 9 9') %For example, Bconordfilt2 = ordfilt2(I,5,ones(3,3)); %implements a 3-by-3 median filter; figure,imshow(Bconordfilt2),title('filtro mediana con ordfilt2'); Bmin = ordfilt2(I,1,ones(3,3)); %implements a 3-by-3 minimum filter; figure,imshow(Bmin),title('filtro mínimo 3 x 3'); %and Bmax = ordfilt2(I,9,ones(3,3)); figure,imshow(Bmax),title('filtro máximo 3x3'); %implements a 3-by-3 maximum filter. % Bnswe = ordfilt2(I,1,[0 1 0; 1 0 1; 0 1 0]); figure,imshow(Bnswe),title('filtro minimo norte, sur, este oeste NSWE'); %replaces each element in A by the minimum of its north, east, south, and
west neighbors. bminsobel=edge(Bmin,'Sobel'); bmincanny=edge(Bmin,'canny'); bminprewitt=edge(Bmin,'prewitt'); bminroberts=edge(Bmin,'roberts'); bminlog=edge(Bmin,'log'); bminzerocross=edge(Bmin,'zerocross',.27,'log'); subplot(2,1,1),imshow(bminsobel),title('filtro minimo con
sobel'),subplot(2,1,2),imshow(bmincanny),title... ('filtro minimo con canny'), subplot(2,2,1),imshow(bminprewitt),title('filtro
minimo con prewitt'), ... subplot(2,2,2),imshow(bminroberts),title('filtro minimo con roberts')
Programa para el proceso de imágenes, obteniendo las estadísticas de los objetos encontrados
close all, imtool close all % lee y despliega la imagen en escala de grises. tic frame=1 for frame=1:45 M(:,:,frame)=imread(cat(2,'C:\Proyecto de
Tesis\Movehi\dt_00',num2str(frame,'%02d'),'.gif')); end
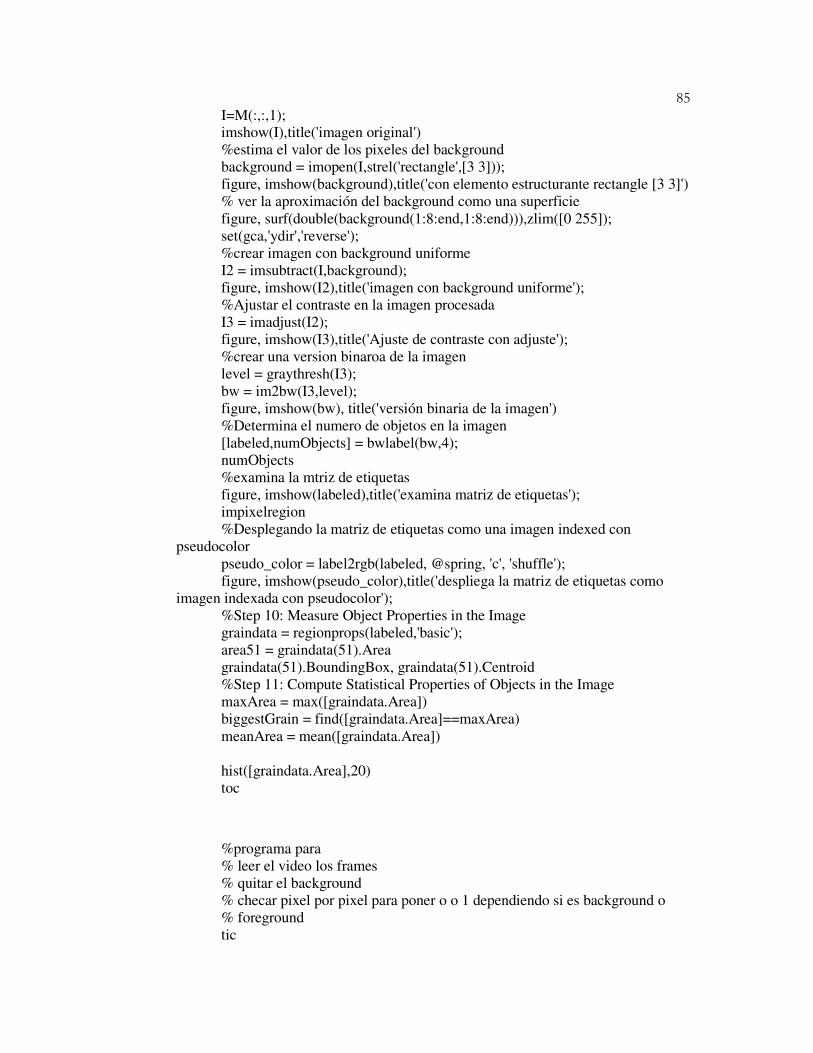
85
I=M(:,:,1); imshow(I),title('imagen original') %estima el valor de los pixeles del background background = imopen(I,strel('rectangle',[3 3])); figure, imshow(background),title('con elemento estructurante rectangle [3 3]') % ver la aproximación del background como una superficie figure, surf(double(background(1:8:end,1:8:end))),zlim([0 255]); set(gca,'ydir','reverse'); %crear imagen con background uniforme I2 = imsubtract(I,background); figure, imshow(I2),title('imagen con background uniforme'); %Ajustar el contraste en la imagen procesada I3 = imadjust(I2); figure, imshow(I3),title('Ajuste de contraste con adjuste'); %crear una version binaroa de la imagen level = graythresh(I3); bw = im2bw(I3,level); figure, imshow(bw), title('versión binaria de la imagen') %Determina el numero de objetos en la imagen [labeled,numObjects] = bwlabel(bw,4); numObjects %examina la mtriz de etiquetas figure, imshow(labeled),title('examina matriz de etiquetas'); impixelregion %Desplegando la matriz de etiquetas como una imagen indexed con
pseudocolor pseudo_color = label2rgb(labeled, @spring, 'c', 'shuffle'); figure, imshow(pseudo_color),title('despliega la matriz de etiquetas como
imagen indexada con pseudocolor'); %Step 10: Measure Object Properties in the Image graindata = regionprops(labeled,'basic'); area51 = graindata(51).Area graindata(51).BoundingBox, graindata(51).Centroid %Step 11: Compute Statistical Properties of Objects in the Image maxArea = max([graindata.Area]) biggestGrain = find([graindata.Area]==maxArea) meanArea = mean([graindata.Area]) hist([graindata.Area],20) toc
%programa para % leer el video los frames % quitar el background % checar pixel por pixel para poner o o 1 dependiendo si es background o % foreground tic

86
tiempoinicial=cputime close all, imtool close all %Lee y despliega la imagen en escala de gris. frame=1 for frame=1:45 M(:,:,frame)=imread(cat(2,'D:\USBShikatroniks\Movehi2\bad_0',num2str(fra
me,'%02d'),'.gif')); end t=cputime media=mean(M,3); cputime-t figure,imshow(uint8(media)), title ('esta es la media de todos los frames'); % pixeles correspondientes en 0,1 %Mstd=std(double(M),0,3); %C=zeros(512,512); Resta=imsubtract(M(:,:,1),uint8(media)); mediaframe=mean(mean(M(:,:,1))) desvst=std(std(double(M(:,:,1)))) CC=(Resta>(mediaframe*.75)); Matriz=Resta.*uint8(CC); figure,imshow(Matriz) toc %for I=1:512 % for J=1:512 % suma=0; % for k=1:45 % suma=suma+(M(I,J,k)-media(I,J))^2; % end % if M(I,J,1)>=(media(I,J)+ Mstd(I,J)) C(I,J)=M(I,J,1); % end % I,J % end %end %figure,imshow(C) cputime-tiempoinicial toc

87
APENDICE C. Herramientas. C.1 Herramientas de procesamiento de las secuencias de imágenes.
Como se ha comentado, la herramienta utilizada para la visualización y
procesamiento de la información de los videos es MATLAB, particularmente el
módulo denominado SIMULINK, y de este módulo algo que podríamos llamar un sub
módulo denominado Video and Image Processing Blockset (un conjunto de bloques
para el procesamiento de video e imágenes). Nos enfocaremos a hablar un poco de
estos dos últimos, que es donde nos apoyamos para el desarrollo del proyecto de
investigación.
SIMULINK, es un software desarrollado por Mathworks Corporation [37] para
modelar, simular y analizar sistemas dinámicos.
SIMULINK es útil para construir modelos o bien para modificar y adecuar
modelos ya existentes. Soporta sistemas lineales y no lineales modelados en tiempo
continuo o discreto o bien en forma híbrida. Es utilizado por científicos e ingenieros
para modelar problemas de distintos tipos. Algunas de sus aplicaciones son:
Industria aeroespacial y defensa
Automotriz.
Comunicaciones
Electrónica y procesamiento de señales
Instrumentación médica.
SIMULINK provee un interfase gráfica de usuario(GUI) constituida por un
conjunto de bloques que permiten dibujar los modelos muy fácilmente.

88
Adicionalmente incluye una biblioteca de bloques que constituyen sus
componentes principales; pero además el usuario tiene la facilidad de construir sus
propios bloques si éstos no le son lo suficientemente útiles.
SIMULINK tiene una fuerte interacción con MATLAB, pues es necesario entrar
a MATLAB para que pueda correr; pero además utiliza características funcionales de
MATLAB para entrar datos al modelo, almacenar resultados para su visualización
desde MATLAB, realiza funciones dentro del modelo mediante llamadas integradas a
funciones y operadores de MATLAB.
Una vez que se arranca SIMULINK desde la línea de comandos de MATLAB,
se despliega una ventana con todos los submódulos que pueden ser utilizados. Si se
desea crear un modelo o abrir uno ya existente, se utiliza el menú File de SIMULINK,
creándose un a ventana con el modelo que se abre o bien una ventanita vacía con el
nombre untitled cuando es nuevo.
A partir de este momento el modelo puede ser creado o modificado según sea el
caso.
Uno de los submódulos a los que hacemos referencia es el llamado Video and
image processing blockset.
En seguida damos una explicación general de los elementos que integran este
submódulo.
El conjunto de bloques de video y procesamiento de imágenes (Inglés: Video
and Image Processing Blockset) es una herramienta para el procesamiento de imágenes
y video en el medio ambiente de Simulink® . En esta sección se dará una breve
introducción a este módulo de conjunto de bloques.
El módulo de conjunto de bloques para video e imágenes es una herramienta
usada para el diseño rápido, realización de prototipos, simulación gráfica, y generación
de código eficiente de algoritmos de procesamiento de video. Los bloques de Video
and Image Processing Blockset pueden importar secuencias de video en el medio

89
ambiente Simulink y realizar filtración en dos dimensiones, transformadas
geométricas y de frecuencia, procesamiento de bloques, estimación de movimiento,
detección de bordes y otros algoritmos de procesamiento de señales. También es
posibles usar el blockset junto con Real-time Workshop para generar automáticamente
código empotrable en C para ejecución en tiempo real.
El conjunto de bloques de Video and Image Processing Blockset soporta tipos de
datos en punto flotante, entero, y punto fijo. Para usar cualquier tipo de datos distintos
a doble precisión y punto flotante de precisión sencilla, es necesario instalar Simulink
Fixed point, otro de los módulos de Simulink.
C.2 Conceptos clave del conjunto de bloques.
El modulo Video and Image Processing Blockset interpreta matrices y arreglos
de entrada. Las imagines son conjuntos de datos de color o intensidad real valorados.
Los bloques interpretan las matrices de entrada como imágenes, donde cada elemento
de la matriz corresponde a un píxel en la imagen desplegada. Datos de video son una
serie de imágenes en el tiempo. Todos los blocks en el módulo pueden procesar
imágenes o videos.
Tipos de imágenes.
Las imágenes pueden ser binarias, intensidad (escala de gris) o RGB.
Imágenes binarias. Las imágenes binarias son representadas por una matriz
booleana de 0’s y 1’s, que corresponden a los pixeles negro y blanco respectivamente.
Se puede obtener más información en la caja de herramientas de procesamiento
de imágenes (Inglés: Image Processing Toolbox)
Imágenes de Intensidad. Son representadas por una matriz de valores de
intensidad. Mientras las imágenes de intensidad no sean almacenadas con colormaps,
se puede utilizar un colormap gris para desplegarlas.
Imágenes RGB.

90
Las imágenes RGB son también conocidas como imágenes true-color . Esas
imágenes son representadas por un arreglo de tres planos, donde el primer plano
representan las intensidades en rojo del píxel, el segundo plano representa las
intensidades en verde y el tercero las intensidades en azul. Los bloques que realizan
operaciones en color, esperan tres matrices de entrada, una para cada componente de
color.
Los módulos que son utilizados en este trabajo se listan en seguida.
Análisis y mejora consta de diez bloques:
1.- Block matching (correspondencia de bloques):
Estima el movimiento entre dos imágenes o dos cuadros
de video usando el método de correspondencia de
2.- Contrast adjustment (ajuste de contraste):
Ajusta el contraste de una imagen escalando linealmente
los valores de pixeles entre valores inferiores y
3.- Detector de esquinas: localiza esquinas y
número de esquinas.
4.- Deinterlacing (convierte video entrelazado a
una forma no entrelazada). Remueve artefactos en
movimiento de imágenes compuestas de campos tejidos
5.-Detector de bordes. Encuentra los bordes en una
imagen de entrada usando métodos Sobel, Prewitt,
Roberts o Canny. El block saca una imagen binaria, una
matriz de valores booleanos, donde valores de píxel igual
a 1 corresponde a bordes. Para los primeros tres métodos,
6.- Equalización de histograma. Resalta el contraste
de la imagen de entrada usando ecualización de
histograma. 7.- Filtro Mediana: efectúa filtración mediana de la
matriz de entrada I

91
El módulo de umbralización consta de siete bloques.
8.- Flujo Óptico: estima el flujo óptico a través de
dos o más videoframes.
9.- SAD: Calcula la suma 2D de diferencias
absolutas(SAD) desplazando la plantilla de la imagen en
incrementos de un píxel a través del interior de la imagen
I. Se puede usar el puerto ROI para definir una región de
10.- Trazo de fronteras: traza las fronteras de
objetos en una imagen binaria BW, en la cual pixeles
diferentes de cero pertenecen a un objeto y pixeles cero
11.- Autoumbral. Automáticamente convierte una
imagen de intensidad a una imagen binaria. Usa el
método de Otsu, el cual determina el umbral partiendo el
histograma de la imagen de entrada tal que la varianza
para cada grupo de pixeles sea minimizada.
12.- Remuestreo de color: Muestrea hacia arriba o
hacia abajo los componentes de una señal YCbCr para
reducir el ancho de banda o requerimientos de 13.- Conversión del espacio de colores: Convierte
información de color entre espacios de colores.
14.- Demosaic: Realiza el demosaicing de una
imagen de entrada en formato Bayer con el alineamiento
especificado. El alineamiento es identificado como la
secuencia de R,G y B pixeles en los cuatro pixeles de la
izquierda en el tope de la imagen en orden por filas.

92
El submódulo de Filtración consta de cuatro bloques.
El sub módulo de Transformaciones Geométricas tiene 5 bloques:
15.- Corrección Gamma: Aplica o remueve
corrección Gamma.
16.- Complemento de imagen: Calcula el
complemento de una imagen binaria o de intensidad. Para
imágenes binarias, el block remplaza ceros por unos y
unos por ceros, en la imagen de salida el negro y blanco
son intercambiados. Para imágenes de intensidad, el
block resta el valor de cada píxel del valor máximo que
puede ser representado por el tipo de datos de la entrada y
sca la diferencia. En la imagen de salida, las áreas
oscuras se ven más claras y las áreas claras más oscuras.
17.- Image Data Type Conversión. Convierte y
escala la imagen de entrada al tipo de datos de salida
18.- 2-D Conversión: Realiza la convolución
bidimensional sobre dos entradas.
19.- 2-D FIR Filter: Realiza filtración
bidimensional FIR de la matriz I usando el filtro de
20.- Kalman Filter: Estima el estado de un sistema
dinámico de una serie de medidas incompletas y/o
ruidosas. Este block usa el estado previamente estimado
para predecir el estado actual. También puede usar la
medida del estado actual y el estado predicho para
21.- Median Filter: efectúa la filtración mediana de
la matriz de entrada I.
22.- Projective Transformation: Convierte una
imagen rectangular a una cuadrilateral, cuadrilateral a
rectangular o imagen cuadrilateral a otra imagen
cuadrilateral.

93
Las operaciones morfológicas son siete:
23.- Resize: Cambia el tamaño de una imagen o de
una región de interés dentro de una imagen.
24.- Rotate: Gira una imagen un cierto ángulo en
radianes. Este ángulo se puede especificar usando la caja
de diálogo o un puerto de entrada. 25.- Shear: desplaza cada renglón o columna de
una imagen por una distancia aumentante o decreciente
linealmente.
26.- Translate: Mueve una imagen arriba o abajo,
izquierda o derecha.
27.- Bottom-hat: Realiza la operación morfológica
bottom-hat sobre una imagen de intensidad o binaria.
29.- Close: Realiza closing morfológico sobre una
imagen binaria o de intensidad.
28.- Dilate: Realiza dilation morfológico sobre una
imagen binaria o de intensidad.
30.- Erode: Realiza la operación morfológica
erosión sobre una imagen de intensidad o binaria.
31.- Label: Etiqueta y cuenta componentes
conectados en una imagen binaria.
32.- Open: efectúa la operación morfológica
opening sobre una imagen binaria o de intensidad.

94
Librería Links, contiene 6 bloques. :
33.- Top-hat: Realiza la operación morfológica top-
hat sobre una imagen binaria o de intensidad
35.- Frame rate display: Calcula y despliega la tasa
de frames de la señal de entrada.
34.- To multimedia file: Escribe muestras de
frames de video y/o de audio a un archivo multimedia..
36.- To video display: Envía datos de video en vivo
a un dispositivo de salida de video, cámara, monitor
conectado al sistema
37.- Video to workspace: Escribe la entrada a un
arreglo especificado en el workspace de Matlab. El
arreglo no está disponible hasta que la simulación para.
39.- Video Viewer: Despliega imágenes o video
38.- Write binary file: Escribe datos binario de
video a un archivo en el formato especificado

95
APÉNDICE D.- Modelo.
En seguida se anexan algunos módulos del modelo para la detección y conteo de
vehículos en movimiento.
Sistema de caracterización de flujo vehicular
Limpia la imagen
I
Th. Img
Count
BoundBox
Vel
Input
RGB
EOF
I
Display Results
Th. Img
Count
BBox
Vel
Video In
Message
Show_Polygon
Vel
4
BoundBox
3
Count
2
Th . Img
1
Thresholding and
Region Filtering
Vel
Th. Img
Count
BBox
Optical Flow
(Horn -Schunck)II VV
2-D FIR Filter
2-D FIR
FilterI
I
1
BBox
3
Count
2
Th . Img
1
Velocity Threshold
Vel Th. Vel
>=
Region Filtering
BW
Count
Regions
Median
FilterI
|u|2
Closing
CloseVel
1

96
Threshold
To Video
DisplayImageImageImage
Switch
single ([1 0 0 ;1 0 0 ; 0 0 0 ;0 0 0 ])
Results
To Video
DisplayImageImageImage
Original
To Video
DisplayImageImageImage
Optical Flow Lines
vel .Values vel .Lines Motion Vector
To Video
DisplayImageImageImage
Insert Text
' ...'
ImageImageImage
Select
Image
Color
ImageImage
Draw
Lines
Image
Pts
Draw
Lines
Image
Pts
Draw
Lines
Image
Pts
Draw
Lines
Image
Pts
Draw
Lines
Image
Pts
Draw Polygon 3
,170 ,440 ,110
Draw Polygon 2
236 ,440Draw Polygon 1
210 ,440Draw Polygon
270 ,440
Display bounding boxes
and number of cars
Count
BBox
Video In
Video Out u+0
Show _Polygon
7
Message
6
Video In
5
Vel
4
BBox
3
Count
2
Th . Img
1
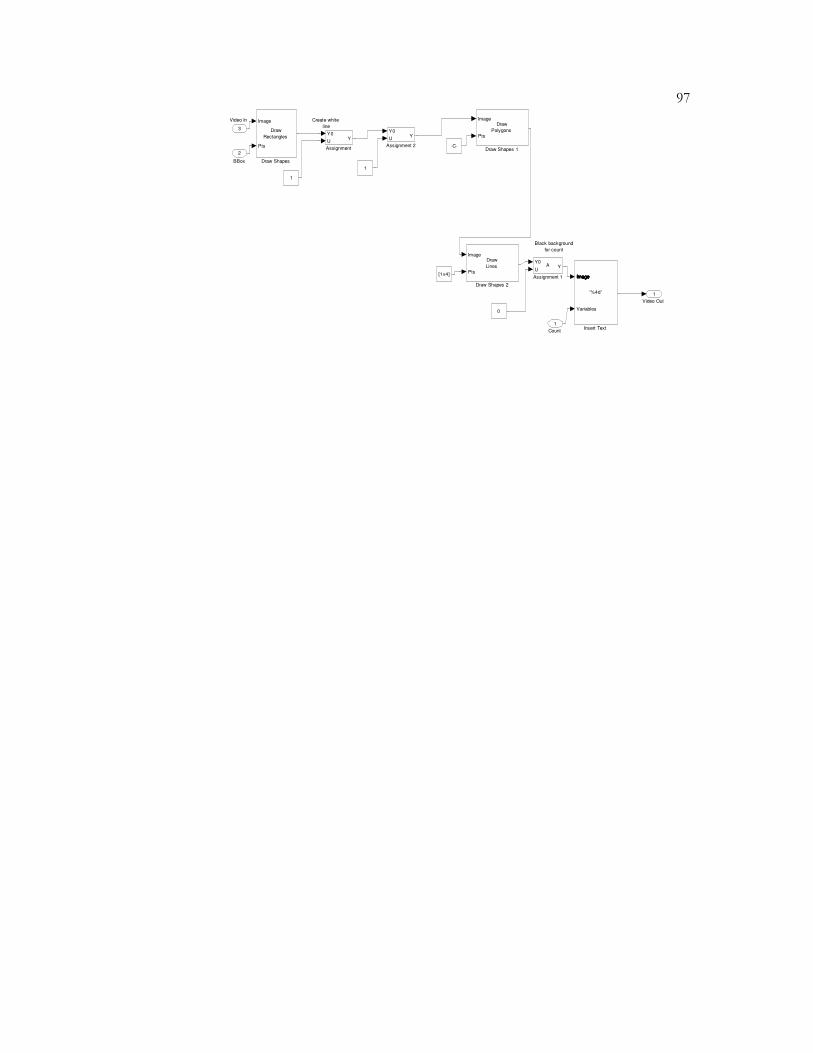
97
Black background
for count
Create white
line
Video Out
1
Insert Text
'%4d'
ImageImageImageImage
Variables
ImageImageImage
Draw Shapes 2
Draw
Lines
Image
Pts
Draw Shapes 1
Draw
Polygons
Image
Pts
Draw Shapes
Draw
Rectangles
Image
Pts -C-
1
[1x4]
0
1
Assignment 2
Y0
UY
Assignment 1
Y0
UYA
Assignment
Y0
UY
Video In
3
BBox
2
Count
1

98
GLOSARIO
Algoritmo ISODATA. Es un algoritmo iterativo para el estimado de umbrales.
A partir de la primera estimación de un umbral, se van recalculando los parámetros y
nuevos umbrales sucesivamente.
Autómata celular. Modelo matemático para sistemas dinámicos que
evolucionan en pasos discretos. Se utilizan para la modelación de sistemas naturales
que contienen una colección masiva de objetos y que interactúan entre sí en forma
local. Algunas de sus aplicaciones son en modelación de tránsito vehicular y peatones,
fluidos y evolución de células.
Calibración de la cámara. Método mediante el cual se estiman los parámetros
intrínsecos y extrínsecos de la cámara, así como los parámetros del manipulador.
También es posible calcular los parámetros del modelo de distorsión del lente de la
cámara.
Clasificación. Proceso de agrupar los píxeles en un número finito de clases
individuales o de categorías de datos con base en los niveles digitales de los datos. Si
un píxel satisface cierto criterio, entonces el píxel es asignado a la clase que
corresponda a este criterio.
Detección de movimiento. Proceso por el cual se determina cuales son los
objetos que están en movimiento en una imagen.
Imagen. Colección de medidas o valores en el espacio bidimensional (2D) o
tridimensional (3D).
Píxel. Cada uno de los puntos que constituyen una imagen en la memoria de la
computadora o en la pantalla.
Procesamiento Digital de Señales. Área de la ingeniería que se dedica al
análisis y procesamiento de señales discretas (audio, voz, imágenes, video). Por lo

99
general las señales en la naturaleza son en forma analógica, existen situaciones en
las que son por su naturaleza digitales, por ejemplo, el número de personas en una cola
de espera, el estado de una puerta (abierta/cerrada).
Rayos X. Forma de energía electromagnética con longitud de onda que van de
los 10 a los 10-2 nanómetros y que son usados para diagnósticos médicos y en
cristalografía.
Reconocimiento de patrones. Dado un conjunto de datos, determinar su
comportamiento (patrón) y en base a ello tomar una acción.
Región de Interés (ROI). Parte seleccionada de la imagen para propósitos de
análisis.
Segmentación de imágenes. Partición de una imagen en regiones
constituyentes no solapadas, las cuales son homogéneas con respecto a alguna
característica como una intensidad o una textura.
Umbralización (thresholding). Método que busca segmentar imágenes
creando una partición binaria de las intensidades de las imágenes. Trata de
determinar un valor de intensidad, llamado umbral (threshold), que separa las clases
deseadas.
Visión de máquina. Estudio de métodos y técnicas a partir de los cuales
puedan construirse sistemas de visión artificial y que puedan ser aplicados a la
solución de problemas prácticos.

100
BIBLIOGRAFÍA
[1] Aysen, T.; Kucukkececi, C. Techniques for background subtraction in urban traffic
videos, Computer Engineering Department, Bilkent University, Ankara, Turkey.
(2000).
[2] Besag, J. On the statistical analysis of dirty pictures, Journal Royal Statistical
Society B, Vol. 48, No. 3, pp. 259–302. (1986).
[3] Bezdek, J. C.; Pal, S. K. Fuzzy Models for Pattern Recognition, Methods that
search structure in data. Pal IEEE Press. (1992).
[4] Brito, D. Imágenes que confunden a la vista y a la mente,
http://serdis.dis.ulpgc.es/~ii-dgc/David/Ilusiones/ilusiones.html
[5] Chetverushkin, B. N.; Churbanova, N. G.; Karamzin, Y. N. y Trapeznikova, M. A.
A two-dimensional macroscopic model of traffic flows based on KCFD-schemes;
European Conference on Computational Fluid Dynamics ECCOMAS CFD 2006;
P. Wesseling, E. Oñate, J. Périaux (Eds),TU Delft, The Netherlands, (2006).
[6] Chowdhury, D.; Wolf, D.E.; Schreckenberg, M. Particle hopping models for two-
lane traffic with two kinds of vehicles: Effects of lane-changing rules, Physica A
235 pp. 417-439. (1997).
[7] Cohen, I.; Medioni, G. Detecting and Tracking Moving Objects for Video
Surveillance. Proc. IEEE Conf. Computer Vision and Pattern Recognition, Vol. 2,
pp. 2319-2326. (1999).
[8] Coto, E. Métodos de segmentación de imágenes médicas, Lecturas en Ciencias de
la Computación. Universidad Central de Venezuela, Facultad de Ciencias, Escuela
de Computación, Laboratorio de Computación Gráfica. (2003).
[9] Koller, D.; Weber, J. y Malik, J. Robust multiple car tracking with occlusion
reasoning. In Proc. European Conf. on Computer Vision, pp. 189-196. (1994).

101
[10] Davies, E. R. Machine Vision: Theory, Algorithms, Practicalities, Elsevier,
(2005).
[11] De la Rosa, J. I.; Villa, J. J.; Miramontes, G.; Gracia, E.; Araiza, A.; Sifuentes, C.
Campos de Markov, criterios convexos y no convexos para la restauración de
imágenes, Encuentro de Investigación en Ingeniería Eléctrica, Universidad
Autónoma de Zacatecas, Zacatecas, México. (2005).
[12] Devijver, P.A.; Kittler, J.V. Pattern Recognition. A statistical approach, Prentice
Hall Englewoods, Cliffs. (1982).
[13] Duda R. y Hart P. Pattern Classification and Scene Analysis, John Wiley & Sons.
(1973).
[14] Fernández, A.; Montoya, M.; Fernández, M. A. y Gómez, F. J. Un enfoque
neuronal al seguimiento de un objeto a través de su tamaño y localización,
Universidad de Castilla-La Mancha; Albacete, España. (2000).
[15] Fukunaga K. Introduction to Statistical Pattern Recognition, 2a edición, Academic
Press. (1990).
[16] Fujiyoshi, H.; Lipton, A.J.; Patil, R.S. Moving target classification and tracking
from real-time video. Proceedings of the Workshop on Application of Computer
Vision, IEEE, pp. 8 – 14. (1998).
[17] Garber J. N.; Lester A. J. Ingeniería de Tránsito en Carreteras, 3a edición,
Universidad de Virginia, Cengage Learning. (2005).
[18] Geman, S.; Geman, D. Stochastic relaxation, Gibbs distribution, and the Bayesian
restoration of images. IEEE Transactions on Pattern Analysis and Machine
Intelligence: Vol. 6, pp. 721–741. (1984).
[19] González, R., Woods, R., Tratamiento Digital de Imágenes, Addison Wesley.
(1996).

102
[20] Guasch, T.; Puig, V.; Figueras, J.; Ramos, J. J. Simulación de procesos
logísticos y retos para la optimización de flotas en tiempo real; LogiSim. (2002).
[21] Gupte, S.; Masoud, O.; Martin, R. F. K.; Papanikolopoulos, N.P. Detection and
Classification of Vehicles, IEEE Trans. On Intelligent Transportation Systems,
Vol. 3, No.1. (2002).
[22] Hand D.J. Discrimination and Classification, John Wiley and Sons. (1981).
[23] Hongeng, S.; Nevatia, R.; Bremond, F. Video-based event recognition: Activity
representantion and probabilistic recognition methods. Institute for Robotics and
Intelligent Systems, University of Southern California, Los Ángeles, CA, U.S.A.
(2004).
[24] Jia, B.; Jiang, R.; Wu, Q.; Hub, M. Honk effect in the two-lane cellular automaton model for traffic flow, Physica A 348 pp. 544–552. DOI: 10.1016/j.physa.2004.09.034 (2005).
[25] Jinman, K.; Cohen, I.; Medioni, G.; Yuan, Ch. Detection and Tracking of Moving
objects from a Moving Platform in Presence of Strong Parallax. Institute of
Robotics and Intelligent Systems. University of Southern California, USA. (2005).
[26] Kamijo, S.; Matsushita, Y.; Ikeuchi, K.; Sakauchi, M. Occlusion robust tracking
utilizing spatio-temporal markov random field model. In Proc. IEEE 15th Int. Conf.
Pattern Recognition, Vol. 1, pp. 140-144. (2000).
[27] Laval, J.A.; Leclercq, L. Microscopic modeling of the relaxation phenomenon
using a macroscopic lane-changing model, Transportation Research Part B
doi:10.1016/j.trb.2007.10.004. (2007).
[28] Leventon, M. E.; Grimson, W. E. L.; Faugeras, O.; Well, W. M. Level set based
segmentation with intensity and curvature priors. III Biomedical Imaging, 5th IEEE
EMBS International Summer School on Volume, D.O.I.
10.1109/SSBI.2002.1233988, pp. 15-23, (2002).
[29] Lozano, A., Torres V., Antún, J. P. Tránsito vehicular en zonas urbanas; Revista
Ciencias 70. (2003).
103
[30] Maerivoet, S.; De Moor, B.Transportation Planning and Traffic Flow Models,
arXiv:physics/0507127v1 [physics.soc-ph] , (2005).
[31] Maravall, D. Reconocimiento de Formas y Visión Artificial, Editorial Ra-Ma.
(1993).
[32] Marr, D. Vision: A Computational Investigation into the Human Representation
and Processing of Visual Information. (1982).
[33] MathWorks, Inc. http://www.mathworks.com.
[34] McLachlan, G. J. Discriminant Analysis and Statistical Pattern Recognition, John
Wiley and Sons. (1992).
[35] MacQueen, J. B. Some methods for classification and analysis of multivariate
observations, Proceedings of 5-th Berkeley Symposium on Mathematical Statistics
and Probability, Berkeley, University of California Press, 1:281-297. (1967).
[36] Mejía, G.; Sánchez, J.; Obregón, F.; Daumerie J.; Horne. J.; Burnette, A. Mobile
source emission inventory of the Monterrey Metropolitan Area using the Mobile 5
model”, Proceedings of the 97th A and WMA Annual Conference and Exhibition,
Indianapolis, Indiana, June 22 - 25, 2004. ISBN: 0-923204-63-6. (2004).
[37] Michie, D.; Halter, D.J.; Taylor, C. C. Machine Learning, Neural and Statistical
Classification, Ellis Horwood Series in AI, Ellis Horwood, New York, N.Y.
(1994).
[38] Montgomery, D. C.; Runger, G. C. Probabilidad y Estadística Aplicadas a la
Ingeniería, Primera Edición, Mc Graw Hill. (1996).
[39] Murat, T.A. Digital Video Processing , Prentice Hall Signal Processing Series.
(2005)
[40] Nagel, K.; Wagner, P.; Woesler, R. Still Flowing: Approaches to traffic flow and
traffic jam modeling. Operations Research 51(5): 681-710. (2003).

104
[41] Molina, R. Introducción al procesamiento de imágenes digitales,
Departamento de Ciencias de la Computación, Universidad de Granada. (2005).
[42] Oberti, F.; Calcagno, S.; Zara, M.; Regazzoni, C. Robust Tracking of Humans and
Vehicles in Cluttered Scenes with Occlusion. International Conference on Image
Processing. (2002).
[43] Osborne, H. S. Artificial Intelligence using C, McGraw Hill. (1987).
[44] Pang, C. C.; Lam, W.L.; Yung, H. C. A novel method for resolving vehicle
occlusion in a monocular traffic-image sequence. IEEE Trans. on Intelligent
Transportation Systems. Vol. 5, No. 3. (2004).
[45] Passarello, G. Imágenes médicas, adquisición, análisis, procesamiento e
interpretación, Editorial Equinoccio. (1998).
[46] Parker, J. R., Algorithms for Image Processing and Computer Vision,
Pattern Recognition Letters, John Wiley and sons. (1997).
[47] Sauer, K.; Bouman, C. Bayesian Estimation of Transmission Tomograms Using
Segmentation Based Optimization, IEEE Trans. on Image Processing, Vol. 2, No.
3, pp. 296-310, July (1993).
[48] Schönof, M.; Helbin, D. Empirical features of congested traffic states and their
implications for traffic modeling. Transportation Science 41(20): 135-166. (2007).
[49] Shapiro, L.G; Stockman, G.C. Computer Vision, Prentice Hall. (2001).
[50] Song, X.; Nevatia, R. A Model-based vehicle segmentation method for tracking.
;Institute for Robotics and Intelligence System, University of Southern California,
Los Angeles. (2000).
[51] Viola, P.; Jones, M. Robust real-time object detection, Second international
workshop on statistical and computational theories of vision, modeling, learning,
computing and sampling; Vancouver, Canada. (2001).

105
[52] Walpole, R. E.; Myers, R. H.; Myers, S.L. Probabilidad y Estadística para
Ingenieros, Sexta Edición, Prentice Hall. (1998).
[53] Wang, Y.; Loe, K.F.; Wu, J.K. A dynamic conditional random field model for
foreground and shadow segmentation. IEEE Trans Pattern Anal Mach Intell.
28(2):279-89. (2006).
[54] Wen-Long J. A kinematic wave theory of lane-changing vehicular traffic,
arXiv.org > math > arXiv:math/0503036v1. (2005).

106
FICHA AUTOBIOGRÁFICA.
Fidencio Sánchez Rueda nació en la ciudad de Monclova, Coahuila, el 12 de
Agosto de 1952 y vivió sus primeros 19 años en Ciudad Frontera, a 5 kilómetros de
Monclova; su padre, Porfirio Sánchez Saldaña (†) fue trabajador de Ferrocarriles
Nacionales de México, empresa paraestatal ya desaparecida, y su madre, María
Ruperta Rueda Santibáñez, se dedicó las labores del hogar. Tuvo 2 hermanos (Antonio
y Fernando), y 5 hermanas (María Isabel, María del Refugio, María de la Paz, Martha
Patricia e Irma Guadalupe).
Estudió la instrucción primaria en la Escuela Ferrocarriles Nacionales Artículo 123
en Ciudad Frontera (1960-1966), y la secundaria y preparatoria en la Escuela
Secundaria y Preparatoria Federal Número 24 de Monclova (1966-1971).
Posteriormente se trasladó a la Ciudad de Monterrey, Nuevo León, donde por
medio de una beca estudió en el Instituto Tecnológico y de Estudios Superiores de
Monterrey la carrera de Ingeniero en Sistemas Computacionales(1971-1975) y la
carrera de Licenciado en Ciencias Físicas(1972-1976) en la Facultad de Ciencias
Físico Matemáticas de la Universidad Autónoma de Nuevo León; asimismo, ya
incorporado a la fuerza laboral, estudió la Maestría en Sistemas en la Facultad de
Ciencias Químicas de la UANL y la Maestría en Administración con especialidad en
Relaciones Industriales en la Facultad de Ingeniería Mecánica y Eléctrica de la UANL.
Viajó a la Ciudad de México, donde estuvo un poco más de dos años (1976-1978)
laborando en empresas de servicios de sistemas.
Desde 1979 ha trabajado en diversos grupos industriales de Monterrey e
impartiendo clases en la Universidad Autónoma de Nuevo León, estando actualmente
asignado a la Preparatoria 16.
A partir del año 2000 se ha dedicado exclusivamente a las labores docentes, en
ocasiones realizando consultorías de sistemas y del área de compensaciones en algunas
empresas de Monterrey y el área metropolitana, enfocando sus esfuerzos en el logro de
una de sus metas más importantes: Obtener el Doctorado con especialización en áreas
afines a sus estudios de licenciatura y maestría.