
Unidad 4 - Método de Los Desplazamientos
155
Repaso de TTV y Método de las Fuerzas 1
-
Upload
cecy-breski -
Category
Documents
-
view
16 -
download
0
description
metedo ttv
Transcript of Unidad 4 - Método de Los Desplazamientos

Repaso de TTV y Método de las Fuerzas
1

2
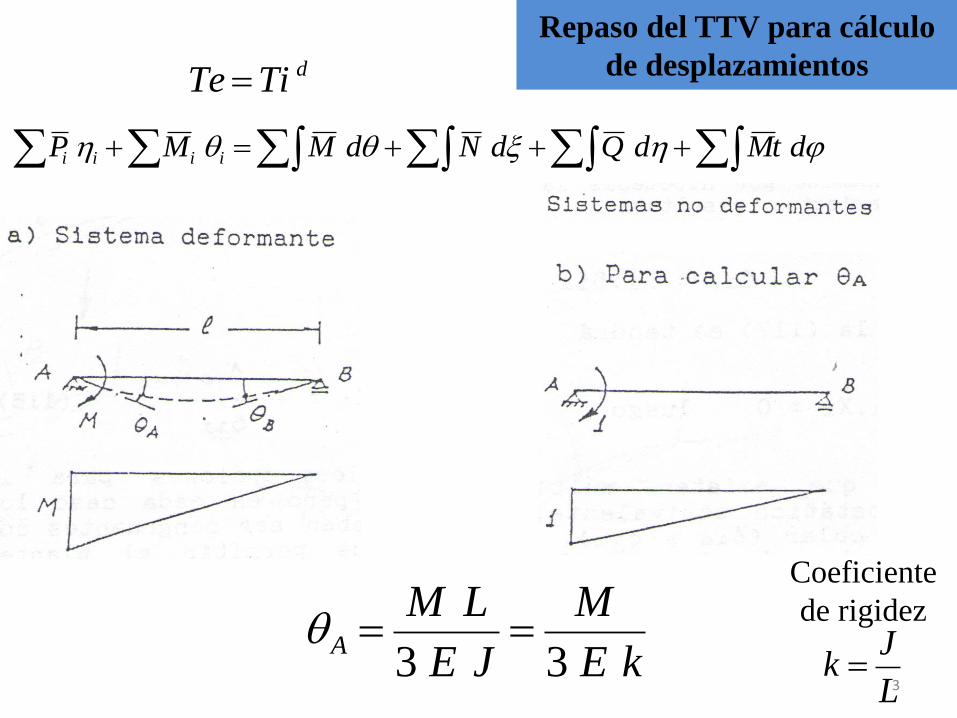
Repaso del TTV para cálculo
de desplazamientosdTiTe
dtMdQdNdMMP iiii
Objetivo: Calcular θA y θB
3
Repaso del TTV para cálculo
de desplazamientos
kE
M
JE
LMA
33
L
Jk
Coeficiente
de rigidez
dTiTe
dtMdQdNdMMP iiii

4
Repaso del TTV para cálculo
de desplazamientos
26A
BJE
LM
dTiTe
dtMdQdNdMMP iiii

5
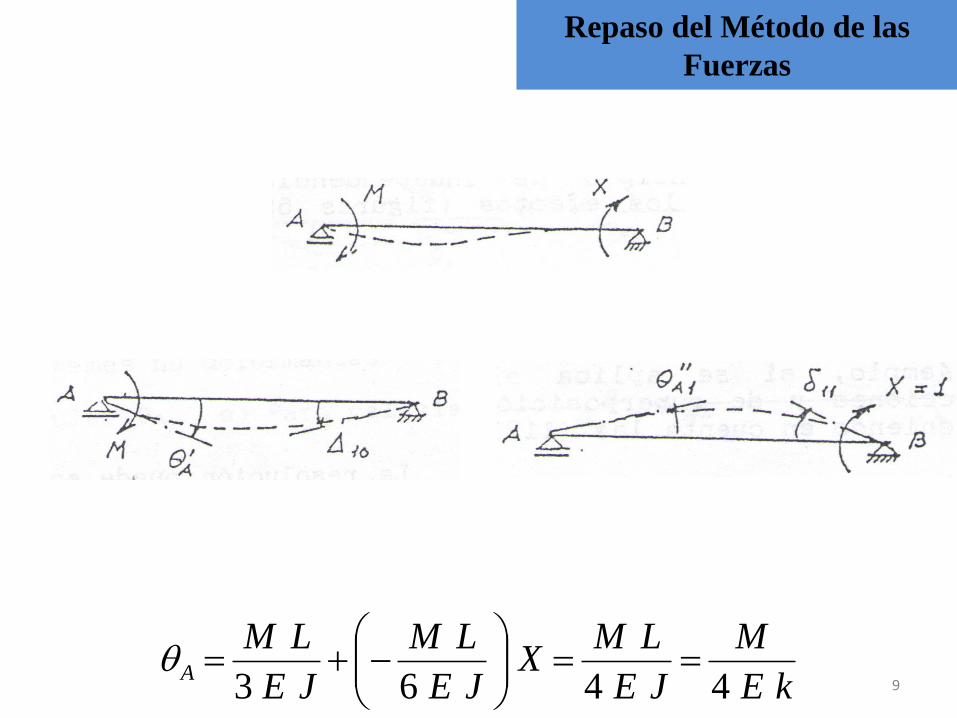
Repaso del Método de las
Fuerzas

6
Repaso del Método de las
Fuerzas 0xxxu X

7
Repaso del Método de las
Fuerzas 0xxxu X
JE
LM
610
JE
L
311

8
Repaso del Método de las
Fuerzas 0xxxu X
2
3
6 M
JE
L
JE
LM
X
9
Repaso del Método de las
Fuerzas
kE
M
JE
LMX
JE
LM
JE
LMA
4463

10
Repaso del Método de las
Fuerzas
023636
M
JE
L
JE
LMX
JE
LM
JE
LMB

11
Repaso del Método de las
FuerzasEn síntesis, para la estructura:
2
MX
kE
MA
4
Para que M provoque un giro unitario en A:
kE
M
41 1
Nota: El presente cálculo de acciones para desplazamientos unitarios, corresponde al Caso 1 de
la sección 2.2.3. del capítulo IV del libro de clase.
kEM AenB 21,
kEM AenA 41,
Para el apoyo B será:
ANÁLISIS ESTRUCTURAL I
Unidad 4: Método de los Desplazamientos o
de las Incógnitas Elásticas
Síntesis
Dr. Ing. Gustavo Palazzo
Profesor e Investigador UTN12

13
Objetivos
Realizar el análisis de estructuras
hiperestáticas.
Incógnitas básicas: Desplazamientos
14
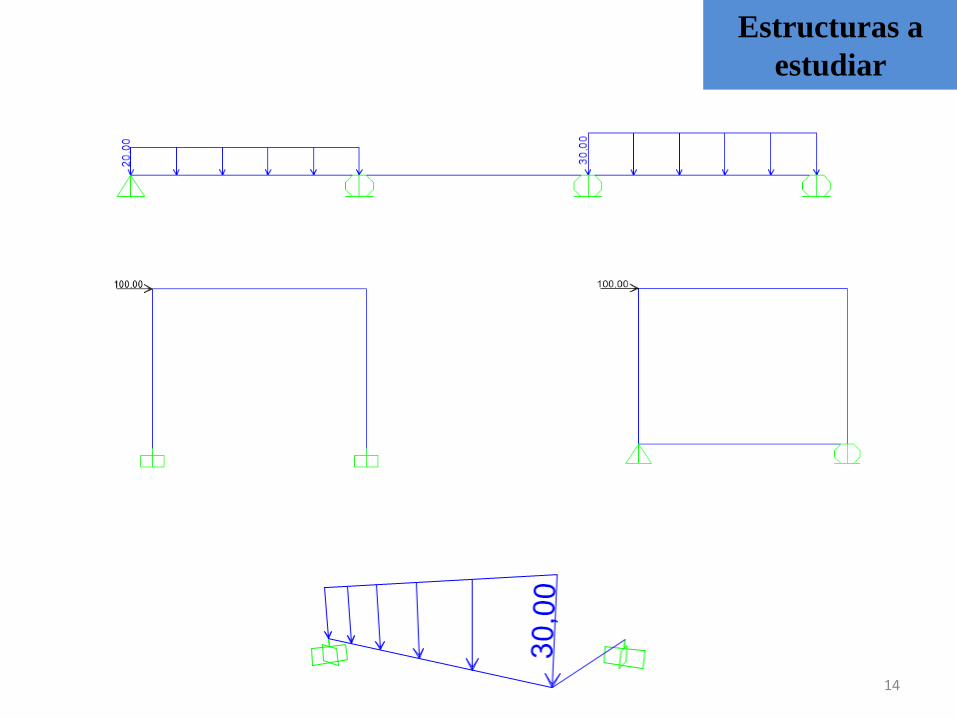
Estructuras a
estudiar

1. Grado de indeterminación
cinemática Xc
15
16
El grado de indeterminación cinemática es igual al número de
incógnitas básicas del Método de los Desplazamientos,
quedando definido por:
. Número de desplazamientos angulares (ángulos de giro de
los nudos, igual a la cantidad de nudos rígidos que pueden
girar en forma independiente).
. Número de desplazamientos lineales independientes de los
nudos.
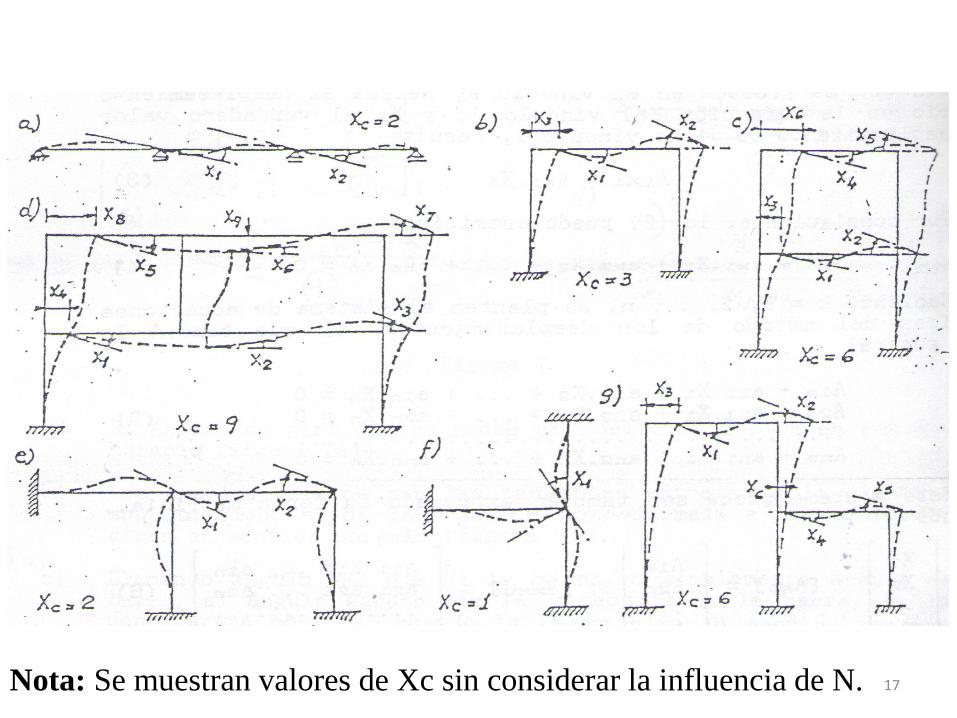
17Nota: Se muestran valores de Xc sin considerar la influencia de N.
2. Formulación del método
18

2.1. Sistema de ecuaciones canónicas
19

20

21
Sistema básico
En el Método de los Desplazamientos el sistema básico se
forma impidiendo todo movimiento en la dirección de cada
una de las incógnitas cinemáticas que presenta la estructura,
mediante la introducción de los vínculos necesarios para
restringirlos.

22
Sistema básico
Vínculo de momento
(angular): Impuesto al nudo
para impedir solo su rotación; es
capaz de generar únicamente un
momento reactivo.
Vínculo de fuerza (corrimiento):
Impuesto al sistema para impedir
solo su desplazamiento lineal; es
capaz de generar únicamente una
fuerza reactiva en la dirección del
vínculo.
23
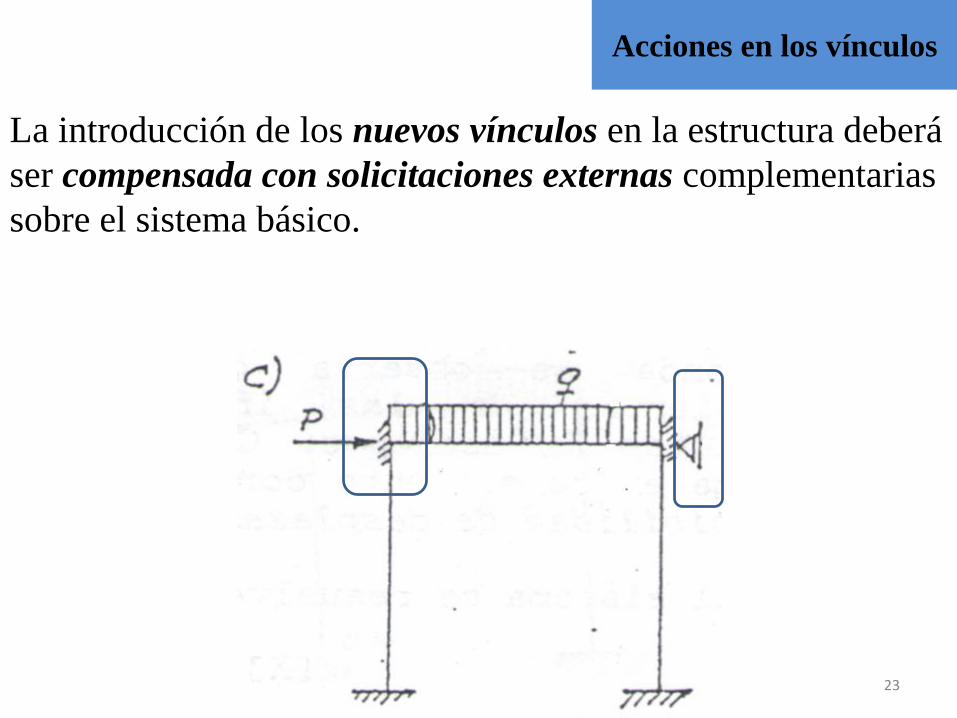
Acciones en los vínculos
La introducción de los nuevos vínculos en la estructura deberá
ser compensada con solicitaciones externas complementarias
sobre el sistema básico.

24
Acciones en los vínculos
Se pueden escribir las expresiones de las acciones que se
generan en los vínculos introducidos Ai (Xi), originadas por
los desplazamientos producidos en los mismos, y por la carga
actuante en el sistema Ai (P0).
Estas reacciones deberán ser iguales a 0, ya que en la
estructura dada esos vínculos no existen.
0),,,(
0),,,(
0),,,(
32103
32102
32101
XXXPA
XXXPA
XXXPA

25
Acciones en los vínculos
Cada ecuación indica la suma de las acciones A en la
dirección 1,2 y 3 debidas, sucesivamente, al sistema P0
actuando sobre el sistema fijo, y a cada uno de los
desplazamientos indicados entre paréntesis.
Se tienen así las ecuaciones básicas del Método de los
Desplazamientos.
0),,,(
0),,,(
0),,,(
32103
32102
32101
XXXPA
XXXPA
XXXPA

26
Acciones en los vínculos
Ai0: Acción reactiva que se produce en el vínculo introducido
i, bajo la acción del sistema exterior de cargas.
0
0
0
321
321
321
33330
22220
11110
xxx
xxx
xxx
AAAA
AAAA
AAAA

27
Acciones en los vínculos
Ai xj: Acción reactiva que se produce en el vínculo introducido
i, debido al desplazamiento real que se produce en la dirección
de cada una de las incógnitas Xj.
0
0
0
321
321
321
33330
22220
11110
xxx
xxx
xxx
AAAA
AAAA
AAAA

28
Acciones en los vínculos
Aixj: No se pueden calcular en forma directa, ya que se
desconocen los verdaderos valores de las incógnitas.
Entonces, para su cálculo, se suponen valores de
desplazamiento unitarios:
jixix XaAjj
aixj: Acción reactiva que se produce en el vínculo introducido
i, debido al desplazamiento unitario que se produce en la
dirección del vínculo j.
Xj: Verdadero valor del desplazamiento en el vínculo j.

29
Acciones en los vínculos
0
0
0
33323213130
32322212120
31321211110
XaXaXaA
XaXaXaA
XaXaXaA

30
Acciones en los vínculos
0
0
0
33323213130
32322212120
31321211110
XaXaXaA
XaXaXaA
XaXaXaA

31
Sistemas de ecuaciones
de equilibrio de fuerzas
0
0
0
33323213130
32322212120
31321211110
XaXaXaA
XaXaXaA
XaXaXaA
Coeficientes: Acciones

32
0
0
0
33323213130
32322212120
31321211110
XaXaXaA
XaXaXaA
XaXaXaA
Incógnitas:
Desplazamientos (en
los nudos de la estructura)
Sistemas de ecuaciones
de equilibrio de fuerzas

33
0
0
0
3
2
1
333231
232221
131211
30
20
10
X
X
X
aaa
aaa
aaa
A
A
A
0
0
0
33323213130
32322212120
31321211110
XaXaXaA
XaXaXaA
XaXaXaA
Sistemas de ecuaciones de equilibrio de fuerzas
Forma Matricial

34
0
0
0
3
2
1
333231
232221
131211
30
20
10
X
X
X
aaa
aaa
aaa
A
A
A
00 XaA xxux
Sistemas de ecuaciones de equilibrio de fuerzas
Forma Matricial
35
00 XaA xxux
0xxxu AXa
0
1
xxxu AaX
Cálculo de las incógnitas cinemáticas

36
0
1
xxxu AaX
Tabla 5 del Capítulo II
del libro de clase.
Tabla 1 del Capítulo IV
del libro de clase.
Cálculo de las incógnitas cinemáticas
2.2. Cálculo de los términos Aio
37

38
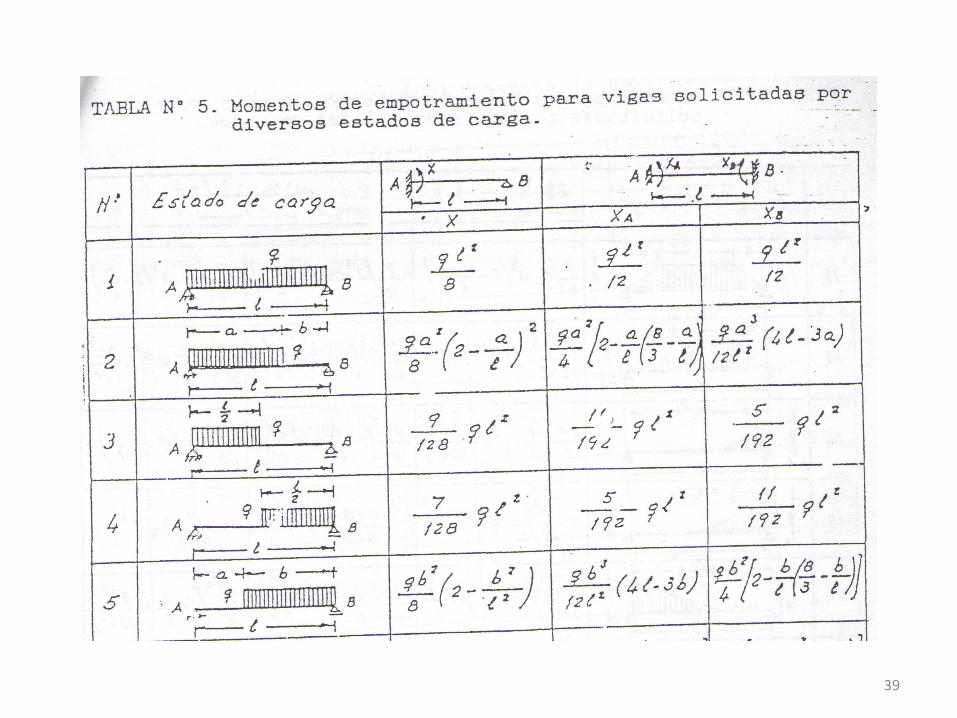
Para determinar las Aio se considera cada elemento de la
estructura: Según sea la condición de vínculos y de carga, se
determinan las acciones de extremo. Se pueden determinar
esas reacciones con la Tabla 5 del Capítulo 2 (la cual se
muestra parcialmente en la slide siguiente).
39

2.3. Cálculo de los términos aik
40

41
Para determinar las aik se considera los casos de la sección
2.2.3. del capítulo IV del libro de clase. Puede usarse también
la Tabla 1 de ese capítulo, que se reproduce parcialmente en la
slide siguiente.

42

3. Aplicaciones – Casos generales
43
44
En las subsecciones siguientes se plantea, por el Método de los
Desplazamientos, el análisis de: (i) vigas continuas; (ii) pórticos; (iii)
marcos y (iv) estructuras espaciales.
En cada caso se muestra:
. Esquema estructural a estudiar;
. Incógnitas cinemáticas en la estructura;
. Acciones en extremo de barras, para el sistema fijo sometido al sistema
exterior de cargas (acciones con las que luego se conforma el vector
{Aio});
. Acciones en extremo de barras, para giros unitarios sucesivos en cada
una de las incógnitas cinemáticas del sistema básico (acciones con las
que luego se conforma la matriz{axxu});
. Sistema de ecuaciones lineales que permite resolver las incógnitas
cinemáticas;
. Momentos flectores en alguno de los extremos de barra (solo analizado
en algunas estructuras estudiadas).

45
Los ejemplos que se muestran a continuación deberán completarse con:
. Conformación del vector {Aio} y la matriz [axxu];
. Cálculo de las incógnitas cinemáticas {X};
. Valores de reacciones y de M, N, Q y Mt en los extremos de cada barra
de la estructura;
.Valores de M, N, Q y Mt en secciones características de cada barra;
. Diagramas de M, N, Q y Mt.
. Trazado de la elástica de deformación (ver sección 6.1. del libro de
clases)
Pueden en cada caso verificarse los valores obtenidos en {Aio}, [axxu],
{X} y M en extremo de barras, en el libro de la cátedra mencionado.

3.1. Resolución de vigas continuas
46
Xc = Cantidad de apoyos
intermedios que posea la viga
(valor que no se modifica aunque
la viga tenga uno o sus 2
extremos empotrados).
Incógnitas: Rotaciones en los
nudos intermedios.

47
Viga continua de 3 tramos

48
Incógnitas cinemáticas
Rotaciones en los nudos 1 y 2.
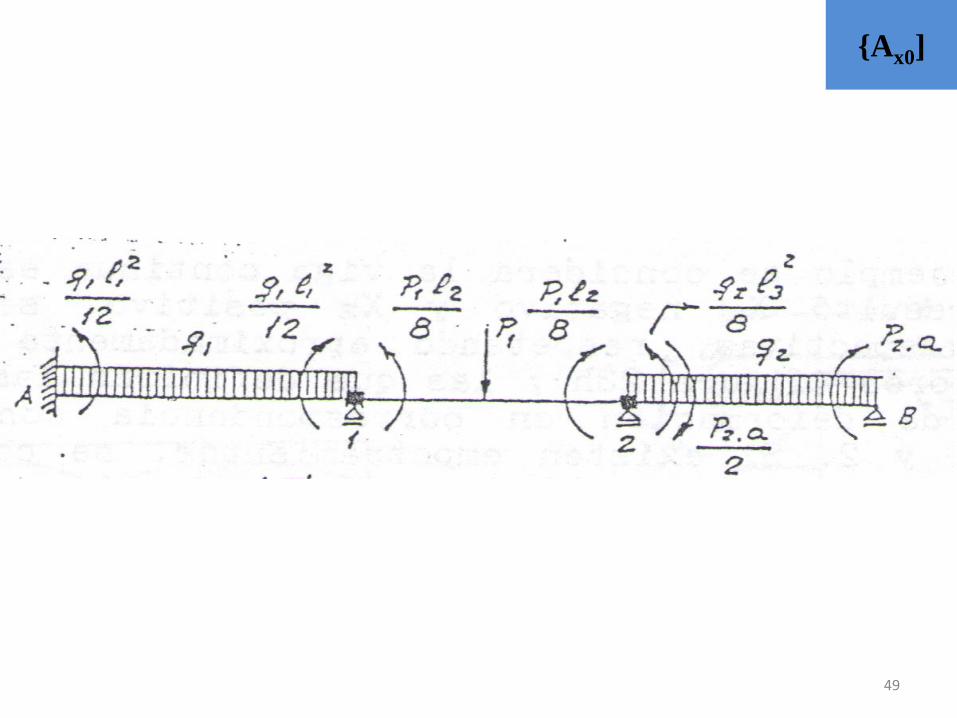
49
{Ax0]

50
[axxu]
Giro unitario en 1

51
[axxu]
Giro unitario en 2

52
{X]
Cálculo del giro en 1 y 2
0xxxu AXa

53
Momentos flectores
A-1
211
2
111 02
12XXkE
lqM A

3.2. Resolución de pórticos
54
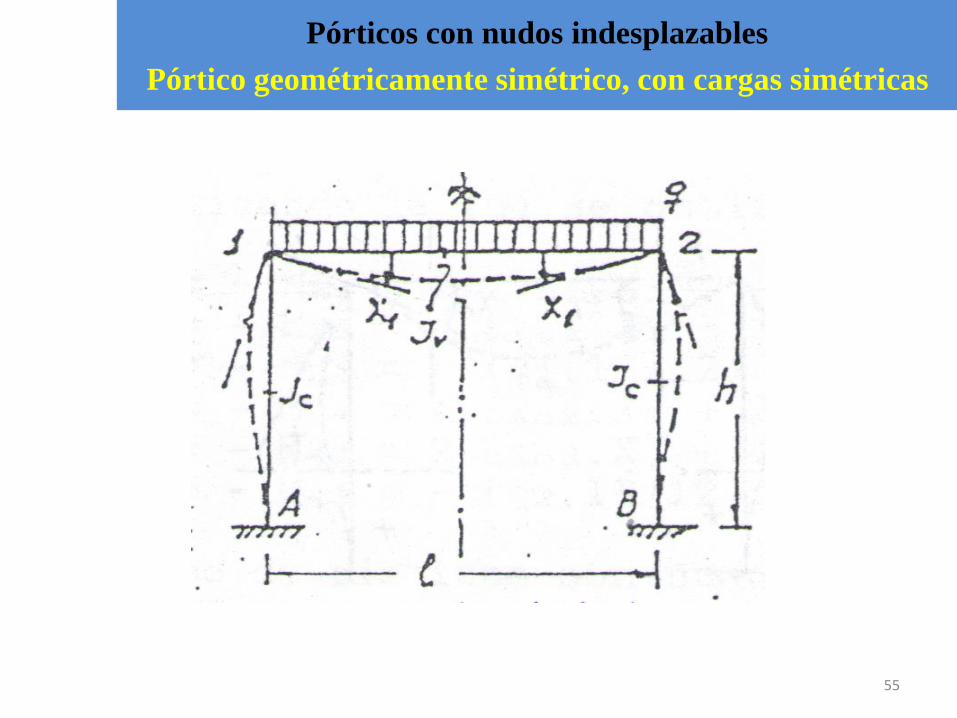
55
Pórticos con nudos indesplazables
Pórtico geométricamente simétrico, con cargas simétricas

56
Incógnitas cinemáticas
Por condición de simetría: solo se tiene X1.

57
{Ax0]

58
[axxu]
Giro unitario en 1
59
{X]
Giro en 1
0xxxu AXa

60
Momentos flectores
A-1
111 20 BcA MXkEM
61
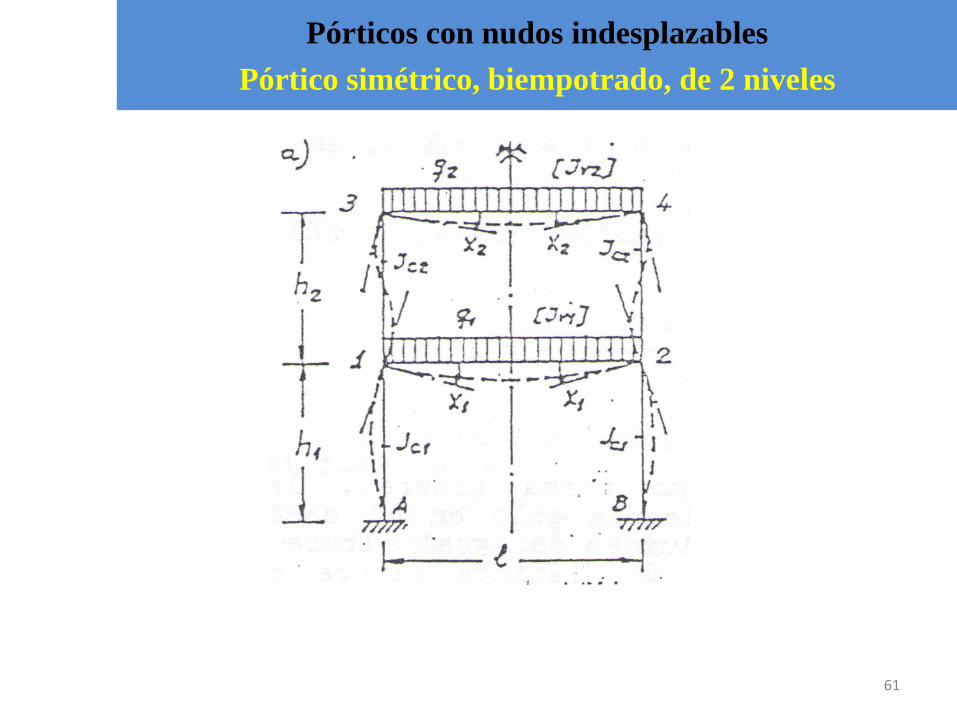
Pórticos con nudos indesplazables
Pórtico simétrico, biempotrado, de 2 niveles

62
Incógnitas cinemáticas
Por condición de simetría: solo se tiene: X1 y X2.

63
{Ax0]

64
[axxu]
Giro unitario en 1

65
[axxu]
Giro unitario en 2
66
{X]
Giro en 1 y 2
0xxxu AXa

67
Momentos flectores
1-2
211
2
121 02
12XXkE
lqM v
68
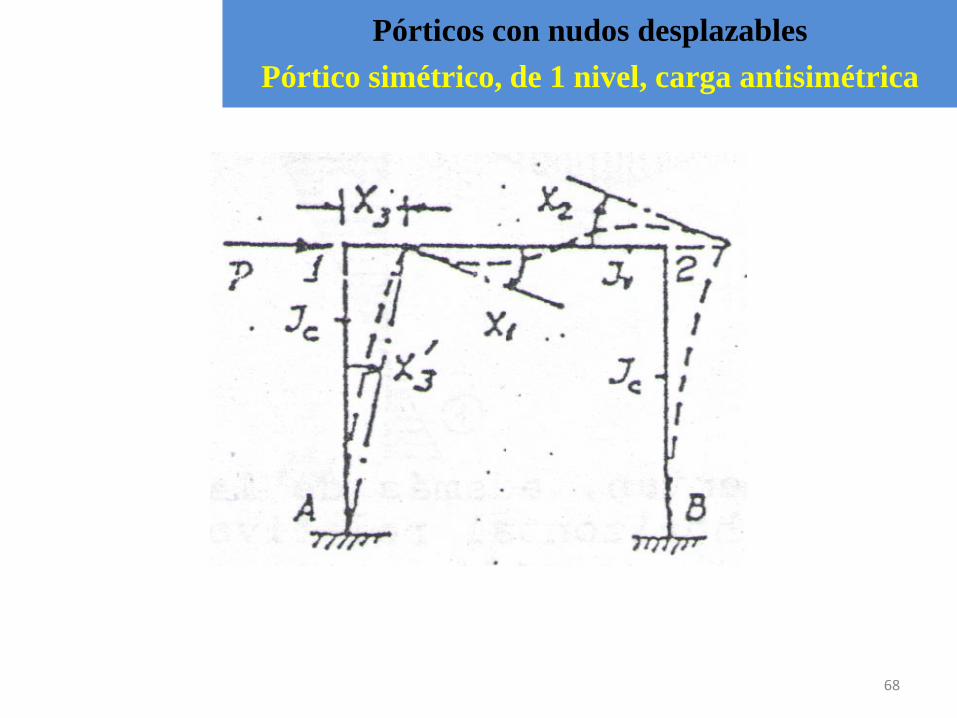
Pórticos con nudos desplazables
Pórtico simétrico, de 1 nivel, carga antisimétrica

69
Incógnitas cinemáticas
Giros X1 = X2 (por la antisimetría de las
cargas), y corrimiento horizontal y X3.

70
Incógnitas cinemáticas
Para esta clase de estructuras, las barras verticales experimentan,
además de la rotación de sus nudos extremos, un corrimiento horizontal
relativo entre los mismos (X3 en la Figura anterior).
Se tendrán entonces incógnitas de desplazamientos angulares (X1 y X2)
y de desplazamientos lineales (X3), cuyas unidades no son
homogéneas.
Para homogeneizar las unidades de los términos en la matriz [axxu], se
puede trabajar con la incógnita X3’ (ángulo de la barra
correspondiente) en vez de la X3.
Nota: La consideración de , en lugar de, es conveniente emplearla solo en el caso de
pórticos empotrados en sus bases, con columnas de igual altura.
h
XX 3
3 '

71
{Ax0]
Nota: Para este ejercicio, en vez de la incógnita de desplazamiento
lineal X3, se trabajará con el giro X3’ (ángulo de la barra).

72
[axxu]
Giro unitario en 1 = 2

73
[axxu]
Giro de barra unitario en 3’

74
{X]
Giro en 1=2 y giro de la barra
0xxxu AXa

75
Momentos flectores
1-A
'640 311 XkEXkEM ccA

76
Pórticos con nudos desplazables
Pórtico simétrico de 2 niveles, con deformación antisimétrica

77
{Ax0]
0'222
3022
212
11 A
hPhh
Ph
P
A’30 corresponde a la reacción que equilibra la columna inferior, ante la acción de las
solicitaciones (activas y reactivas) restantes. Así, tomando momentos respecto al
empotramiento A, se tiene la ecuación que permite determinar su valor:

78
[axxu]
Giro unitario en 1

79
[axxu]
Giro unitario en 3

80
[axxu]
Giro unitario en columna PB

81
[axxu]
Giro unitario en columna PA
82
{X]
Giro en 1, 3, columna PB y PA
0xxxu AXa
83
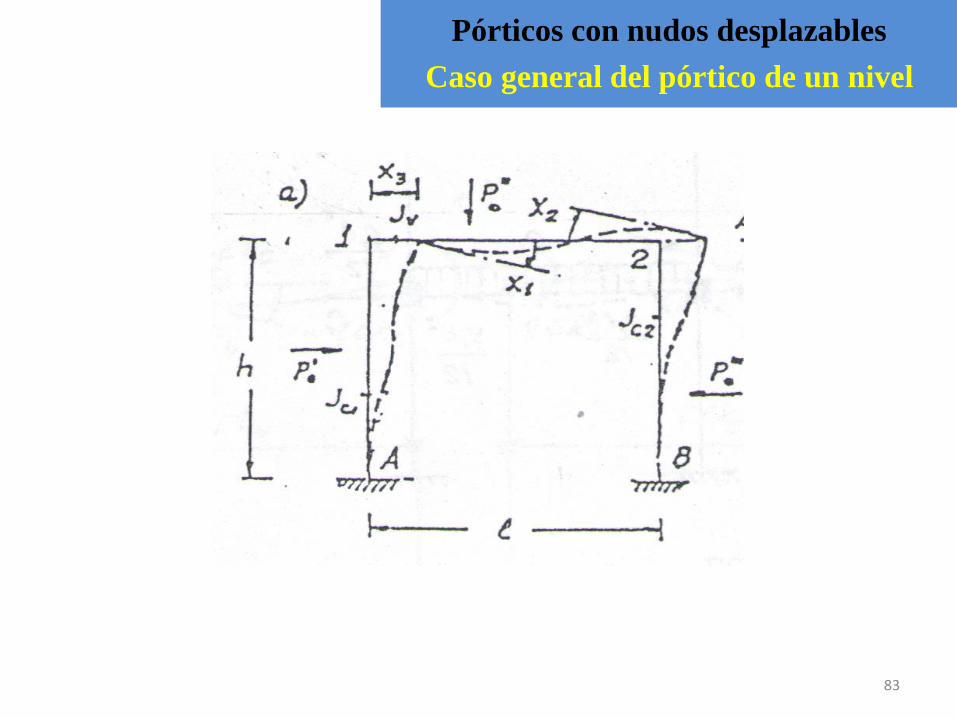
Pórticos con nudos desplazables
Caso general del pórtico de un nivel
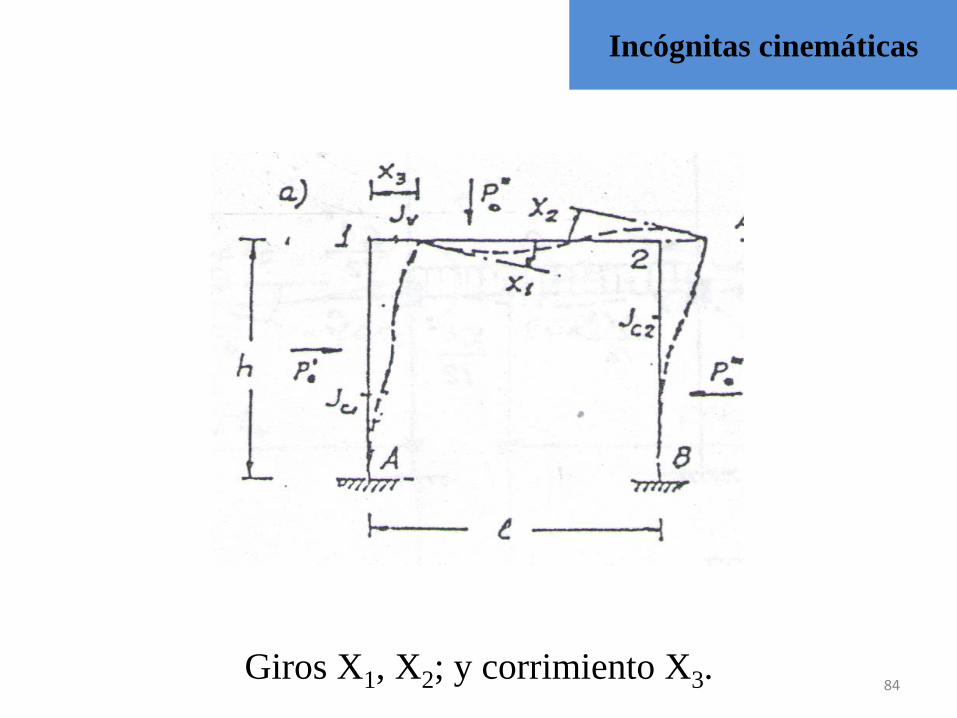
84
Incógnitas cinemáticas
Giros X1, X2; y corrimiento X3.

85
{Ax0]

86
[axxu]
Giro unitario en 1

87
[axxu]
Giro unitario en 2

88
[axxu]
Corrimiento unitario en 3

89
{X]
Giro en 1, 2 y corrimiento en 3
0xxxu AXa

90
Pórticos con nudos desplazables
Caso general del pórtico de dos niveles

91
Incógnitas cinemáticas
Giros X1, X2, X4 y X5 ;y corrimientos X3 y X6.

92
{Ax0]
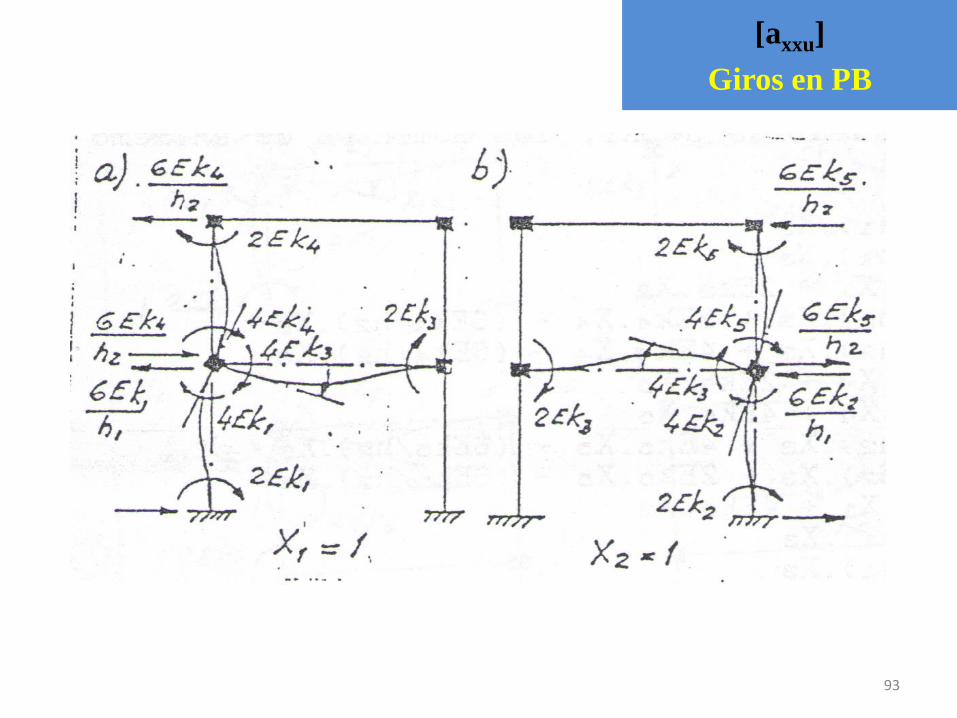
93
[axxu]
Giros en PB

94
[axxu]
Corrimiento en PB

95
[axxu]
Giros en PA

96
[axxu]
Corrimiento en PA
97
{X]
Giro en 1, 2, 4 y 5; y corrimientos en 3 y 6
0xxxu AXa

3.3. Resolución de marcos
98

99
Tanque con tabique divisorio
Compartimiento izquierdo bajo presión p
Simetría de estructura y cargas
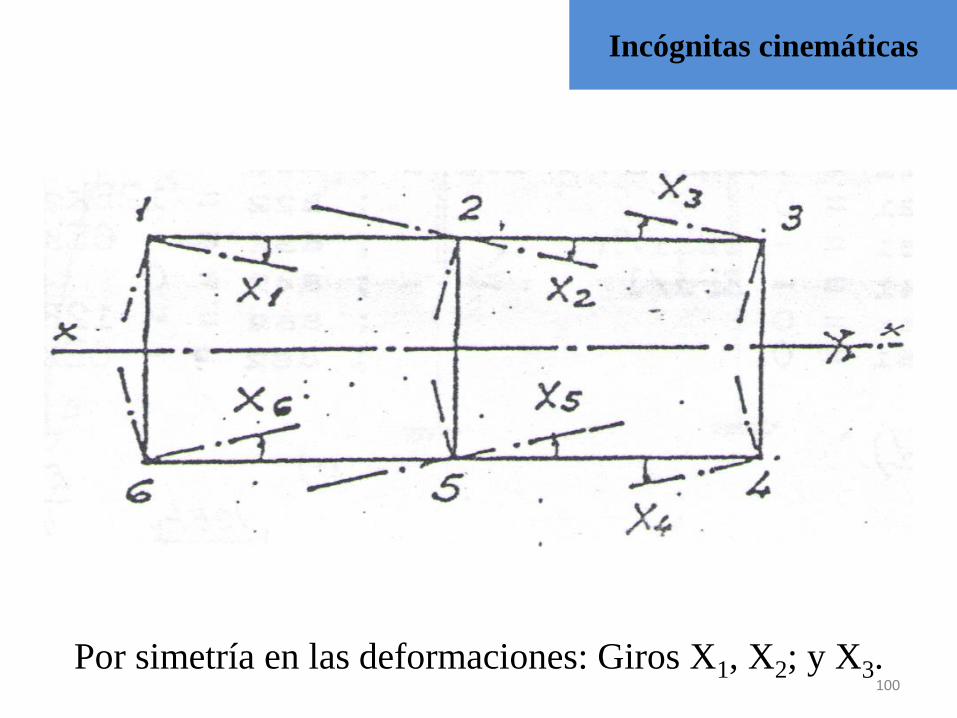
100
Incógnitas cinemáticas
Por simetría en las deformaciones: Giros X1, X2; y X3.
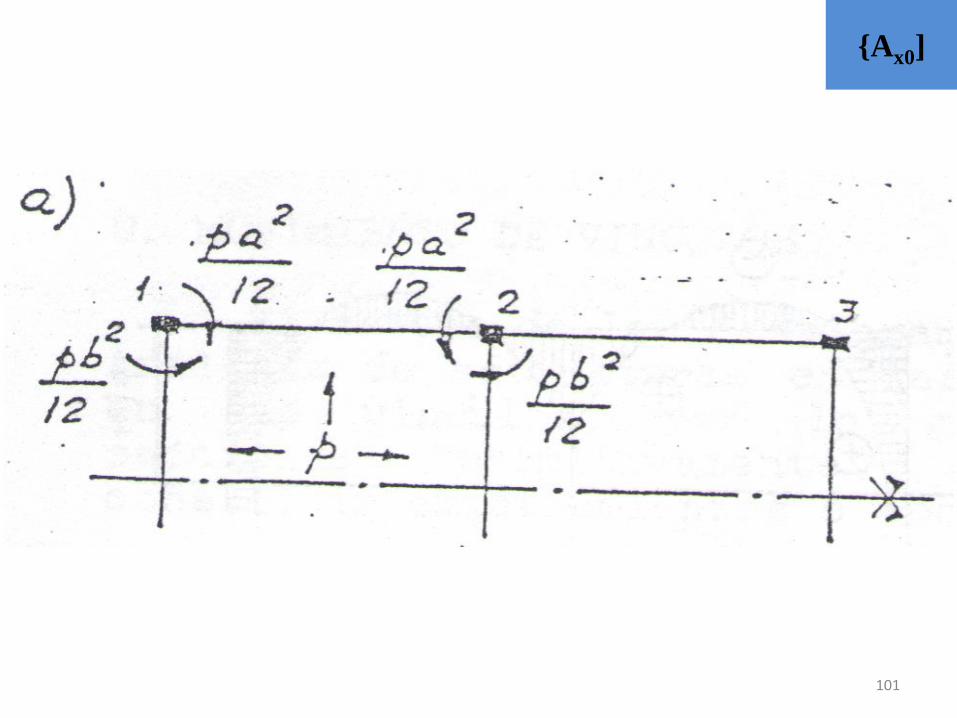
101
{Ax0]

102
[axxu]
Giro en 1

103
[axxu]
Giro en 2

104
[axxu]
Giro en 3

105
{X]
Giros en los nudos 1, 2 y 3
0xxxu AXa

3.4. Resolución de estructuras espaciales
106
Xc = Cantidad de
desplazamientos nodales que es
necesario conocer a fin de definir
el estado de deformación de la
estructura.

107
Emparrillado plano

108
Incógnitas cinemáticas
Corrimiento vertical X1 (del nudo de encuentro entre las 2 vigas);
rotaciones en las secciones del nudo X2 y X3, en la dirección de cada
viga.

109
{Ax0]

110
[axxu]
Corrimiento en 1

111
[axxu]
Giro en 2

112
[axxu]
Giro en 3

113
{X]
Corrimiento en 1, giro en 2 y 3
0xxxu AXa
4. Aplicaciones – Casos particulares
114

115
Viga continua sobre apoyos elásticos
Se trata de una viga donde sus apoyos pueden experimentar
desplazamientos en la dirección perpendicular al eje de la viga.

116
Incógnitas cinemáticas
Se tienen 4 incógnitas cinemáticas: dos giros en los nudos 1 y 2, dos
desplazamientos lineales para esos nudos.

117
{Ax0]
Dadas las incógnitas cinemáticas planteadas, no solo hay que considerar
los momentos A10 y A20, sino también las reacciones A30 y A40.

118
[axxu]
Giro unitario en 1
Considerar también las reacciones en nudos 1 y 2.

119
[axxu]
Giro unitario en 2

120
[axxu]
Desplazamiento unitario en 1

121
[axxu]
Desplazamiento unitario en 1
Se calcula ahora la acción correspondiente a un desplazamiento unitario
del resorte, el cuál se supone con comportamiento según Ley de Hooke.
Suponiendo como resorte una columna de área F, longitud h, módulo
elástico E, que sufre un acortamiento/alargamiento 𝛥h, la reacción
correspondiente será:
hh
FER R
FE
hh que también puede expresarse como:
La reacción para desplazamiento unitario (E F /h) se denomina
constante de resorte, y el alargamiento/acortamiento para fuerza unitaria
(h / E F) se denomina coeficiente de compresibilidad.
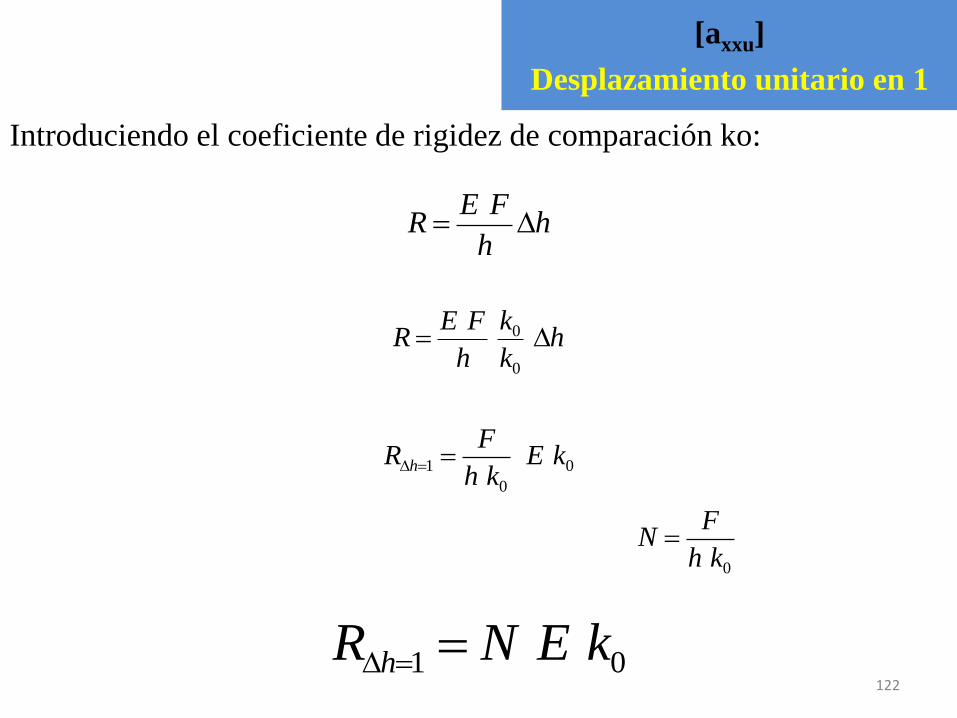
122
[axxu]
Desplazamiento unitario en 1
Introduciendo el coeficiente de rigidez de comparación ko:
hh
FER
hk
k
h
FER
0
0
0kh
FN
0
0
1 kEkh
FR h
01 kENR h

123
[axxu]
Desplazamiento unitario en 2

124
{X]
Cálculo del giro y desplazamiento en 1 y 2
0xxxu AXa

125
Pórtico con influencia del esfuerzo normal

126
Incógnitas cinemáticas
Giros X3, X6; corrimiento X1 y X4; y
desplazamientos verticales X2 y X5

127
Incógnitas cinemáticas
Xc = 3 * Nº de nodos en la estructura.

128
{Ax0]
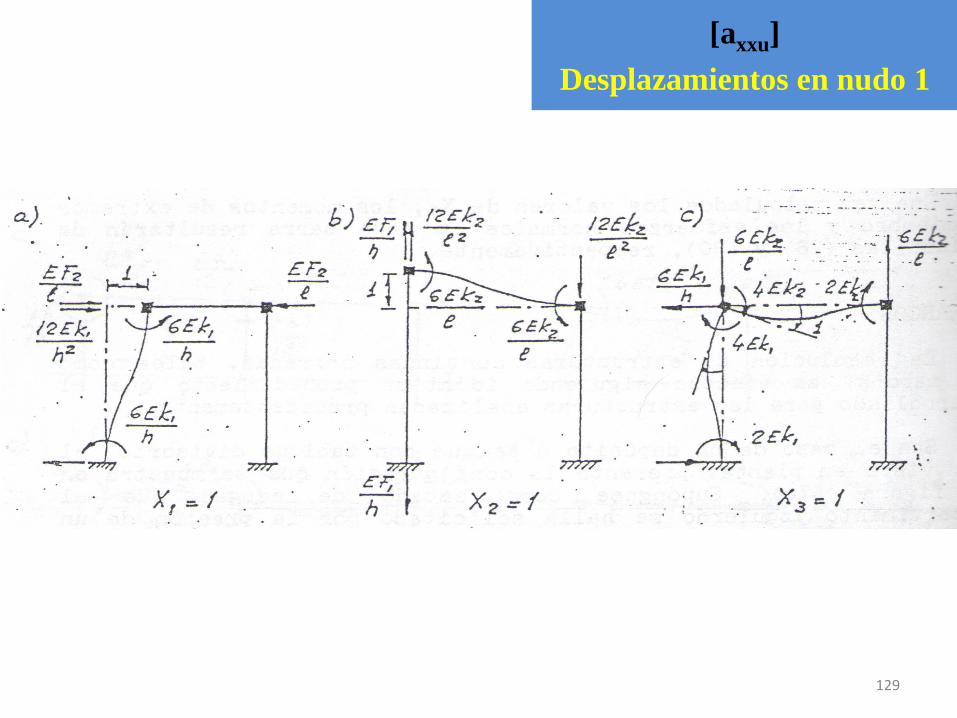
129
[axxu]
Desplazamientos en nudo 1
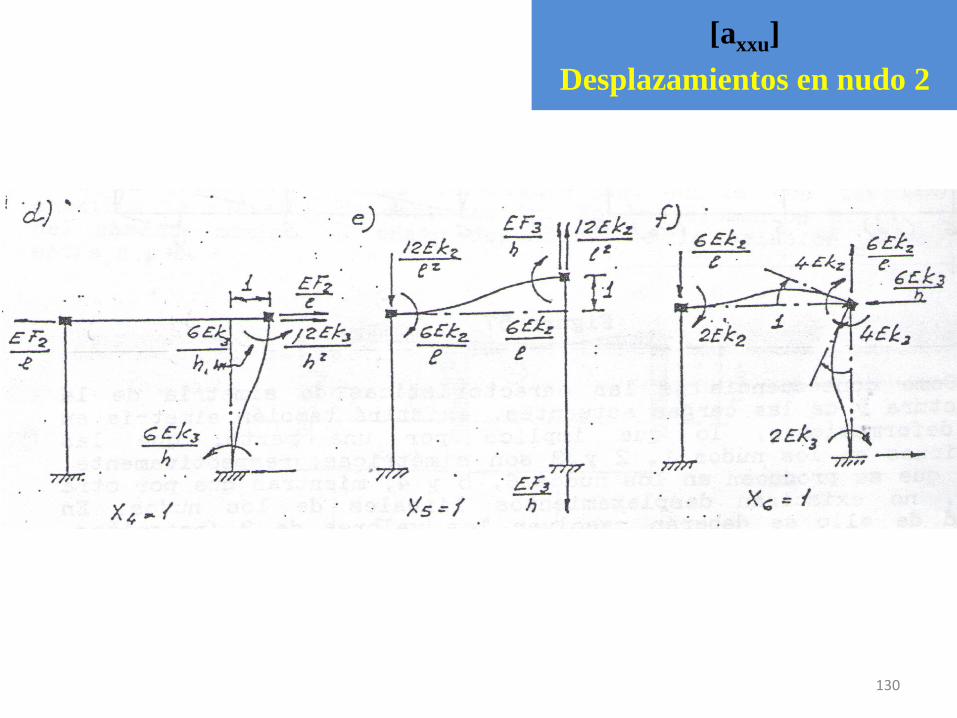
130
[axxu]
Desplazamientos en nudo 2

131
{X]
3 desplazamientos por cada nudo
0xxxu AXa

132
Pórtico con influencia del esfuerzo de corte
Para el cálculo de las aik se deben considerar los Casos 9 y 10 de la
sección 2.2.2 del Capítulo IV del libro de clase. Así, para el caso de giro
unitario en el extremo de una barra biempotrada:
41
641
212
41
14
31
21
11
l
kEa
kEa
kEa
l
kEa
kEa
kEa
'621'2
1'4
31
21
11
2
2 4
33
l
d
FGl
JE
41'
kk
133
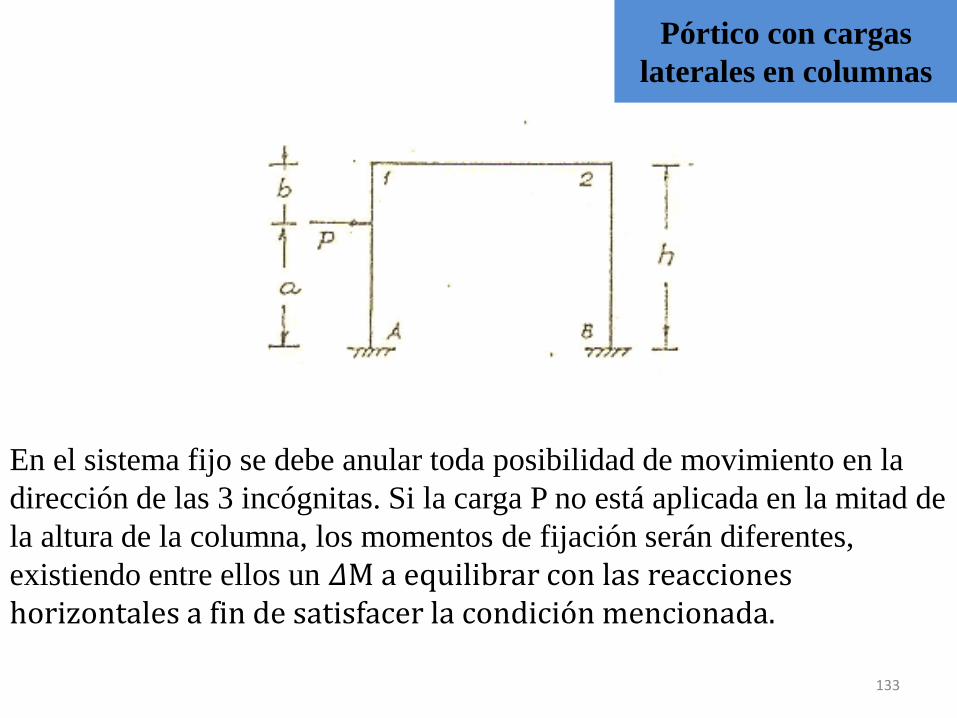
Pórtico con cargas
laterales en columnas
En el sistema fijo se debe anular toda posibilidad de movimiento en la
dirección de las 3 incógnitas. Si la carga P no está aplicada en la mitad de
la altura de la columna, los momentos de fijación serán diferentes,
existiendo entre ellos un 𝛥M a equilibrar con las reacciones horizontales a fin de satisfacer la condición mencionada.

134
Pórtico con cargas
laterales en columnas
h
M
h
aP
Ax ...
...
0
2
2
1
2
2
1
l
baPM
l
baPM
MMM
A
A

135
Pórtico con momentos
en los nudos
136
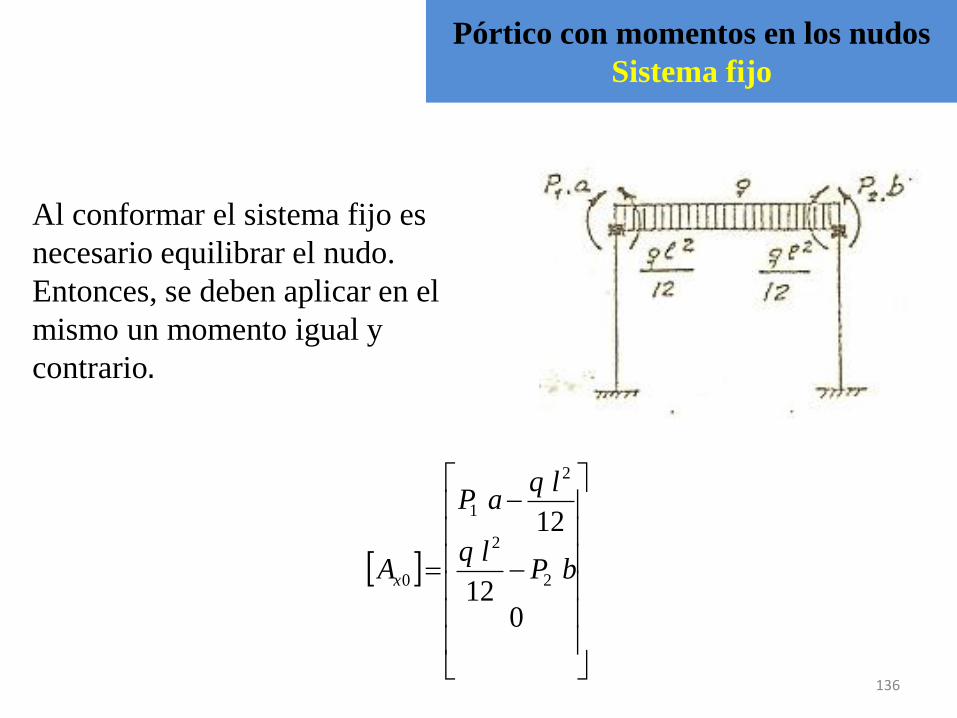
Pórtico con momentos en los nudos
Sistema fijo
Al conformar el sistema fijo es
necesario equilibrar el nudo.
Entonces, se deben aplicar en el
mismo un momento igual y
contrario.
012
12
2
2
2
1
0 bPlq
lqaP
Ax

137
Pórtico con momentos en los nudos
Sistema fijo
0
012
12
0
0
2
2
0 lq
lq
Ae
Al conformar este vector solo se consideran
los momentos de fijación en los extremos
de barra, por lo que no aparecen los
momentos aplicados en los nudos.

138
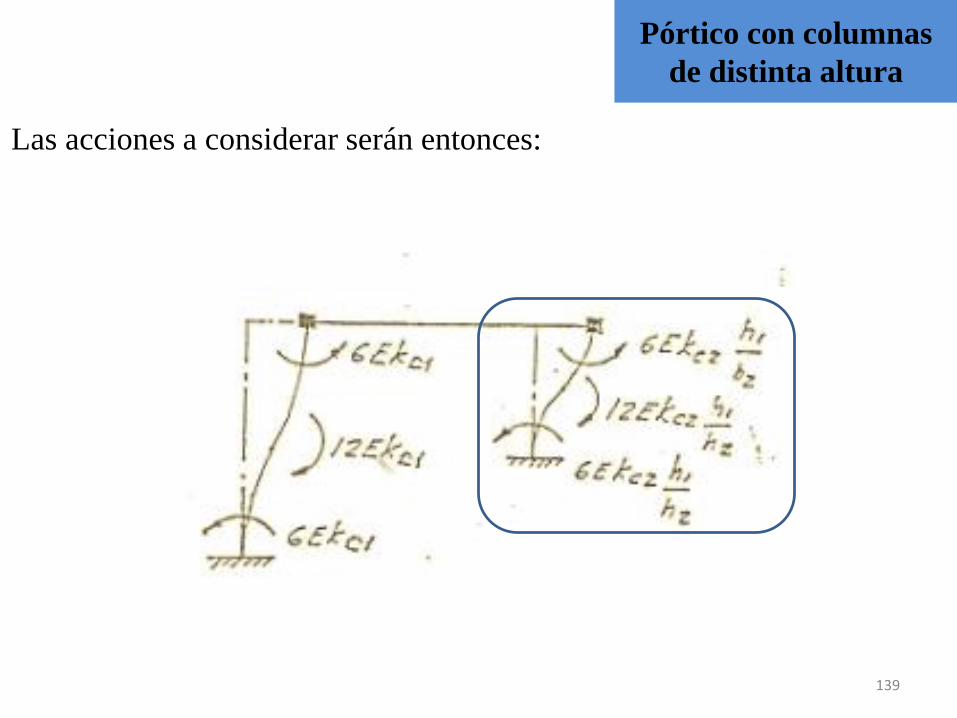
Pórtico con columnas
de distinta altura
No hay modificaciones en la determinación de [Axo], ni en las acciones
para [axxu] si se toma la incógnita de desplazamiento X3. En cambio, si
como tercera incógnita cinemática se considera X3’ en vez de X3, el giro
será unitario en la columna de la izquierda, pero con un valor h1/h2 en la
columna de la derecha.
139
Pórtico con columnas
de distinta altura
Las acciones a considerar serán entonces:

140
Pórtico con tabique
141
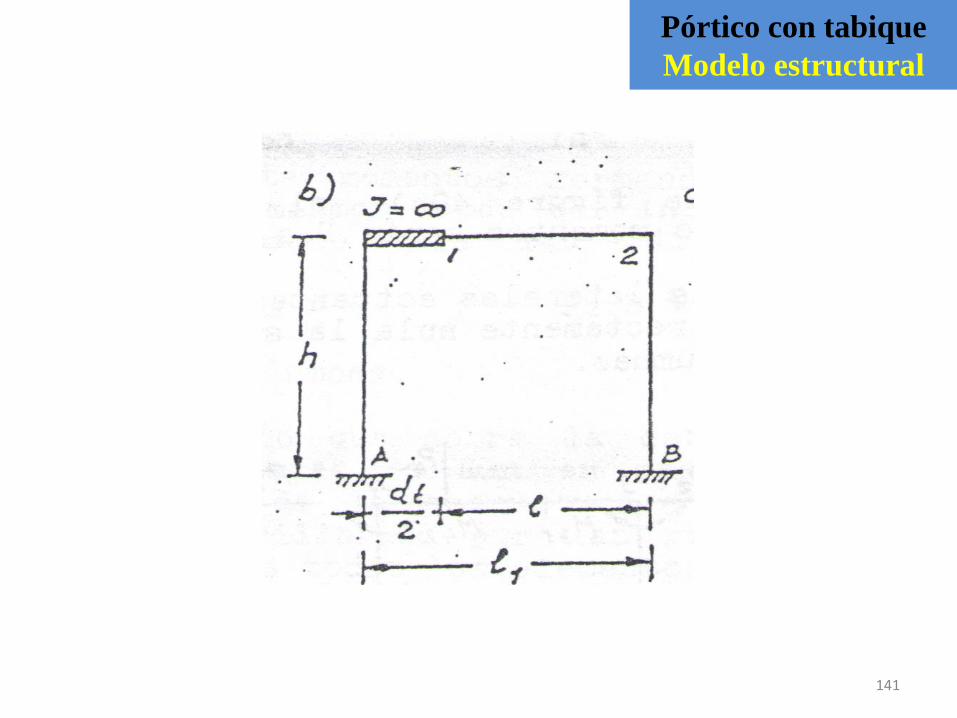
Pórtico con tabique
Modelo estructural

142
Incógnitas cinemáticas
Giros X1, X2;y corrimiento X3.

143
{Ax0]

144
[axxu]
Giro en 1

145
[axxu]
Giro en 2

146
[axxu]
Corrimiento en 3

147
{X]
Giros en 1 y 2; y corrimiento en 3
0xxxu AXa

5. Verificaciones
148

5.1. Verificación de nudos
149
150
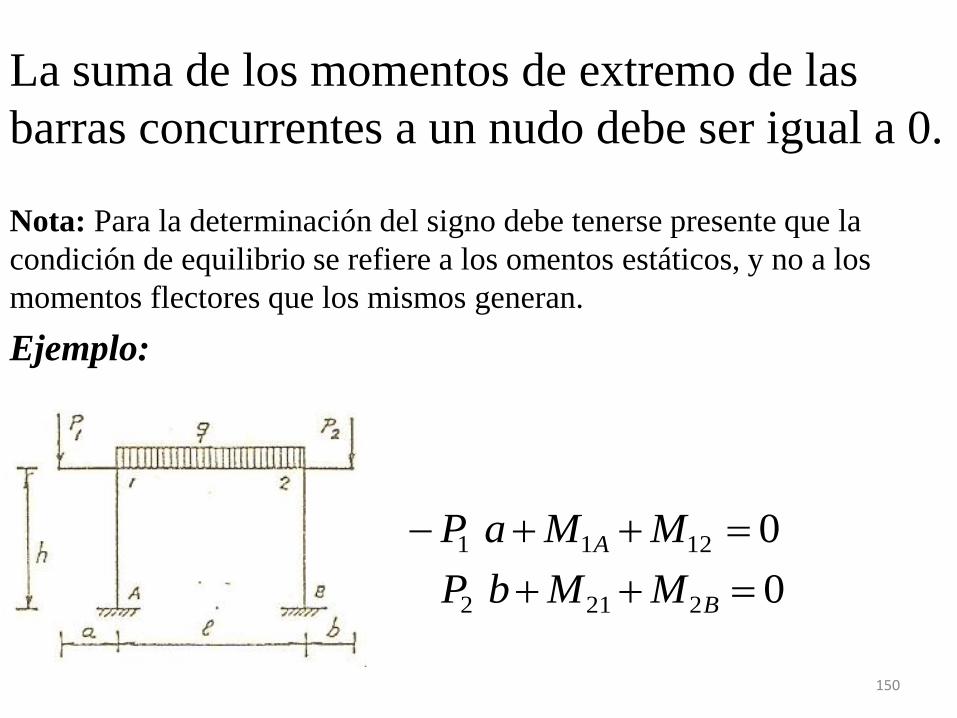
La suma de los momentos de extremo de las
barras concurrentes a un nudo debe ser igual a 0.
Nota: Para la determinación del signo debe tenerse presente que la
condición de equilibrio se refiere a los omentos estáticos, y no a los
momentos flectores que los mismos generan.
Ejemplo:
0
0
2212
1211
B
A
MMbP
MMaP

5.2. Verificación de columnas
151

152
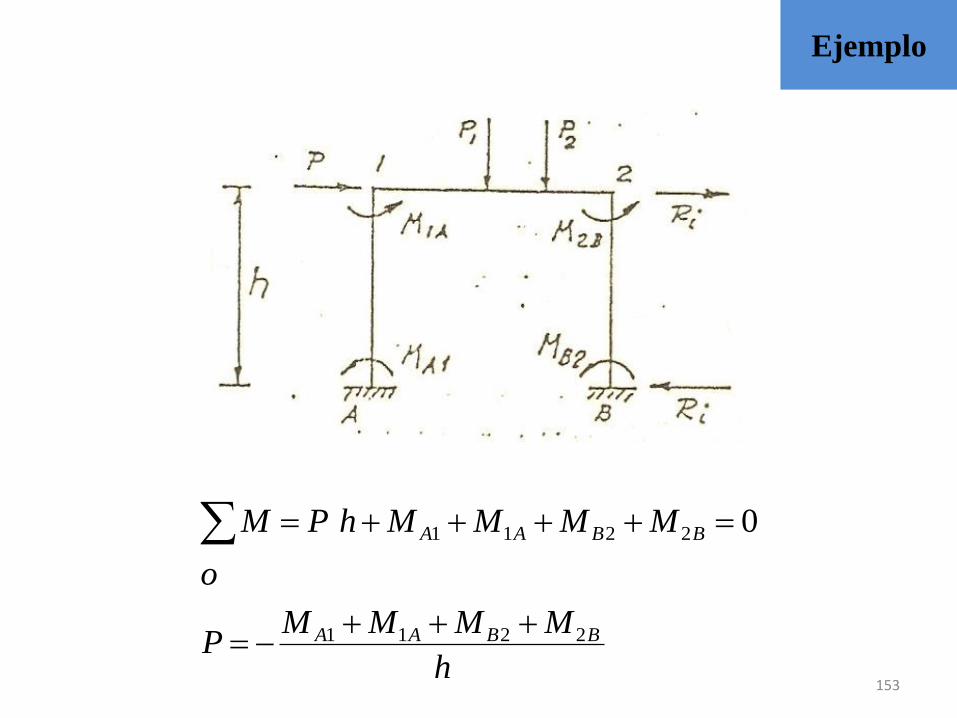
El momento de vuelco que sobre la estructura
producen las acciones laterales aplicadas (o aun
en el caso de no existir las mismas, la no
simetría de la estructura y/o la de las cargas
verticales), debe ser equilibrado por las
reacciones que generan los momentos de
extremo de todos los elementos verticales.
153
Ejemplo
h
MMMMP
o
MMMMhPM
BBAA
BBAA
2211
2211 0

154
Ejemplo
2
22
1
11
h
MM
h
MMP BBAA

155
Ejemplo
S
SR
h
MP
2
2
iS
iSRR
h
M
h
MP
12
1
24421331 MMMMMS
BBAA MMMMM 22111 FIN


















