treball recerca
24
12/1/2012 Marc Saperas Casanovas | 2n Bachillerat A TREBALL DE RECERCA CREACIÓ D’UN ROBOT DE NETEJA
-
Upload
marc-saperas -
Category
Documents
-
view
221 -
download
0
description
el meu treball de recerca sobre la creacio d'un robot de neteja
Transcript of treball recerca

12/1/2012
Marc Saperas Casanovas | 2n Bachillerat A
TREBALL
DE
RECERCA CREACIÓ D’UN ROBOT DE NETEJA

2
Agraïments
Voldria agrair a totes les persones que m’han ajudat al llarg de tot el treball. Com son el Sr.
Pere Vilardell per el temps que hi ha dedicat supervisant tot el procés, a la meva mare la
Sra. Magda Casanovas per ajudar-me en la adquisició del robot i al meu tiet el Sr. Enric
Gabarró per ajudar-me en el plantejament del robot.
3
Índex 1. Pròleg ......................................................................................................................................................... 4
2. Introducció ................................................................................................................................................. 5
3. Què és un robot? ......................................................................................................................................... 6
3.1Definició de robot. ................................................................................................................................. 6
3.2Tipus de robots ...................................................................................................................................... 6
3.3 Elements caracteristics.......................................................................................................................... 8
3.3.1 Hardware....................................................................................................................................... 8
3.3.2 Software ...................................................................................................................................... 10
4.LA PROGRAMACIÓ EN ROBOTICA ..................................................................................................... 11
4.1 Programació general ........................................................................................................................... 11
5. La programació de Lego NTX .................................................................................................................. 11
5.1 El panell ............................................................................................................................................. 12
5.2 Sensors ............................................................................................................................................... 13
5.2.1 Característiques sensors ............................................................................................................... 13
5.3 Motors ................................................................................................................................................ 14
5.3.1 Característiques motors ............................................................................................................... 14
5.4 Altres elements ................................................................................................................................... 15
6. El projecte: Programació del robot de neteja MARK................................................................................. 16
6.1 Per que un robot de neteja. .................................................................................................................. 16
6.2 Casos considerats: MARK-1 i MARK-2 ............................................................................................. 17
6.2.1 MARK-1 ..................................................................................................................................... 17
6.2.2 MARK-2 ..................................................................................................................................... 18
6.3.1 Procés de programació per al MARK-1 ....................................................................................... 19
6.3.1 Procés de programació per al MARK-2 ....................................................................................... 20
7- Valoració de l’efectivitat dels models MARK-1 i MARK-2...................................................................... 21
8. Procés de depuració i millora de la màquina. ............................................................................................ 22
9. Conclusions .............................................................................................................................................. 23
10. Annexos ................................................................................................................................................. 24
10.1 Els programes. .................................................................................................................................. 24
10.2 Galeria d’imatges.............................................................................................................................. 24
10.3 Galeria de vídeos publicats a la xarxa. .............................................................................................. 24
11-bibliografia .............................................................................................................................................. 24

4
1. Pròleg
Des de fa molts anys tot el nostre món està molt mecanitzat en àmbits com les
industries. Però un cop mes, estem veient com els avenços tecnològics que anem
aconseguint es van incorporant lentament en els àmbits més tancats com són les llars. I
aquests estan agradant als consumidors, per què els permeten reduir els seu paper en
algunes tasques de la llar fatigoses i, en els dies que transcorren, cada vegada hi ha menys
gent disposada a fer aquestes feines. Ja pot ser el cas d'un robot de cuina, un robot que
neteja piscines, un robot que talli la gespa o un robot que netegi el terra de casa.
Jo en aquest treball he fet un robot de neteja ja que en aquests últims anys són els
que han tingut més sonada i volia saber quin era el seu funcionament i veure si era capaç
d’emular-ne un.
Llavors vaig veure una línia de la marca Lego© que estava especialitzada en robots
i que era molt ben rebuda pels consumidors (aquesta línia de productes va des de la
iniciació mes bàsica del coneixement en aquest camp fins a l’ús d’aquests robots a les
universitats), llavors vaig comprar el MINDSTORM 2 NXT i després de planificar amb el
tutor el desenvolupament del projecte em vaig posar a treballar-hi.

5
2. Introducció
Aquest treball esta dividit en dues parts:
En la primera es parla sobre les bases generals de la robòtica. Sobre els tipus de
robots que existeixen, les seves funcions i sobre les seves parts físiques (sensors, motors...).
També es parla dels diferents sensors que existeixen en l’àmbit de Lego© i sobre la
programació en diferents àmbits i s'explica el llenguatge de programació de Lego©
MINDSTORM, que és el que s’ha utilitzat per a la creació del robot.
En la segona part del treball es parla sobre el projecte de construir un robot de
neteja.
S’explica el per què de la seva forma i s’ensenya els processos de construcció i de
programació que s’han anat desenvolupant des del seu inici fins ara.
També es fa una valoració d’efectivitat sobre el robot creat segons diferents factors i es
tracten les millores que es podrien efectuar per millorar el robot. Acabo traient conclusions
sobre el projecte.

6
3. Què és un robot?
3.1Definició de robot.
Un robot és un aparell mecànic automatitzat que té com a finalitat fer una tasca.
Aquesta tasca pot ser executada per supervisió humana directa, a traves d'un programa
informàtic predefinit o seguint un conjunt de regles generals.
3.2Tipus de robots
Hi ha diferents tipus de robots i cadascun d'ells esta preparat per a fer diferents
feines:
Humanoides un robot humanoide es un robot autònom, ja que pot adaptar-
se als canvis en el seu entorn per assolir la seva meta. En aquest context podem
incloure unes capacitats bàsiques per als humanoides.
1.- auto-manteniment.
L’auto-manteniment és la capacitat dels humanoides per a poder
regular-se ells mateixos. Ja sigui posant-se a carregar, fer comprovacions del seu sistema,
etc.
2.- aprenentatge autònom.
L’aprenentatge autònom permet que el robot vagi adquirint per ell
mateix diferents conceptes des de que es fabrica. Ja sigui aprenent un vocabulari o a fer
feines diverses.
3.- interacció segura amb els humans.
L’interacció segura fa referència a que al interactuar un robot amb un
humà, no hi hagi cap mena de risc per a l’humà provinent del robot.

7
Els robots humanoides estan creats per a imitar algunes de les mateixes tasques
físiques i mentals que experimenten els essers humans cada dia.
Un dels exemples mes coneguts en l’àmbit dels humanoides es el robot de la
empresa Honda, Asimo.
Mòbils: Robots mòbils tenen la capacitat de moure’s en el seu entorn .
Els robots mòbils són el centre d'una gran quantitat d'investigacions. Els Robots mòbils
també es troben en la indústria, militars i entorns de seguretat. També apareixen com a
productes de consum, d'entreteniment o per realitzar certes tasques com escombrar, per a la
jardineria i altres tasques comuns de casa.
Zoomòrfics:son aquells que intenten imitar
als animals i es poden classificar segons:
caminadors i no caminadors.
Figura 1: Animació ASIMO font: http://www.youtube.com/watch?v=pqfu734iMe4
Figura 2: robot Lego© mindstorm

8
Poliarticulats: son aquells que tenen alguna extremitat.
Tenen un control automàtic, re programable, es mouen en tres o més
eixos, els quals poden ser fixos o mòbils i s'acostumen a utilitzar en
les industries.
3.3 Elements caracteristics.
Qualsevol electrodomèstic d'avui en dia esta creat a partir de dos conceptes: el
hardware i el software. Aquets dos conceptes també constitueixen les parts bàsiques d'un
robot.
3.3.1 Hardware
El hardware es la part física de qualsevol aparell, des de els engranatges fins a la
carcassa. Es tot allò que es pot tocar.
Normalment, els elements mes comuns en els robots son:
Per a la locomoció del robot i per a moure les articulacions: erugues, rodes, motors,
engranatges, gomes o corretges (depenent del tamany del robot), bateries.
Figura 3: braç robotic
Figura 4: motor Lego © NXT

9
Per a poder recollir dades necessitem els sensors, que ens indiquen diferents coses
(que faran que el robot reaccioni d'una certa manera) com ara: per on xoquen, a quina
velocitat van, quina distancia tenen respecte altres objectes...
Exemples:
Sensor de xoc:
És el sensor que fa que al rebre un impacte, enviï una senyal al robot per dir-li que
ha xocat.
Sensor de ultrasons
És el sensor que identifica la distancia a la que esta el robot d'un objecte.
Sensor de color
És el sensor que identifica el color d’un objecte segons la intensitat que crea aquest i
converteix aquesta intensitat en un numero per al robot.
Figura 5: sensor Lego © de xoc
Figura 6: sensor Lego © de proximitat
Figura 7: sensor Lego © de color

10
Per poder tenir un software necessitem: bateries, processadors, memòries (depenent
de la tasca si necessita acumular noves informacions per a la seva autoactualitzacio). En el
cas del MINDSTORM ho tenim tot en el que anomenem “ladrillo”
Per a poder protegir, donar estabilitat, aguantar algun element dels anteriorment
tractats o tans sols per a donar-li un aspecte personalitzat necessitem un chasis.
3.3.2 Software
El software es la part virtual del robot. Es la part lògica d'aquest, la que indica a
cada part del robot que ha de fer i com s'ha de moure.
Figura 8: CPU Lego © NXT

11
4.LA PROGRAMACIÓ EN ROBOTICA
4.1 Programació general
La programació és un llenguatge per a poder parlar amb la consola. És l'eina
principal per a poder crear o modificar el software de qualsevol aparell i és l'estri que ens
permet decidir quines accions volem que faci el robot o decidir com ha de respondre
depenent dels estímuls que rebi. Es regeix per expressions i instruccions.
Avui en dia hi ha molts llenguatges de programació diferents. Normalment els llenguatges
que s’utilitzen en robòtica no són específics per aquest camp; és a dir, també s’usen en
altres apartats de la informàtica.
Els llenguatges de programació principals son: JAVA, C, C++,visual basic...
Normalment, el que es fa en aquest tipus de llenguatges, és crear biblioteques específiques
per a diferents camps, per tal de tenir recopilades les idees bàsiques amb les que iniciarem
el nostre programa.
5. La programació de Lego NTX
El MINDSTORM és un llenguatge de programació visual que està adaptat per a
gent sense gaires coneixements de programació.
Per a poder programar amb MINDSTORM es necessita un programa anomenat
LEGO MINDSTORMS NXT 2.0 que permet interpretar aquest llenguatge d'una manera molt
més visual i esquemàtica.
12
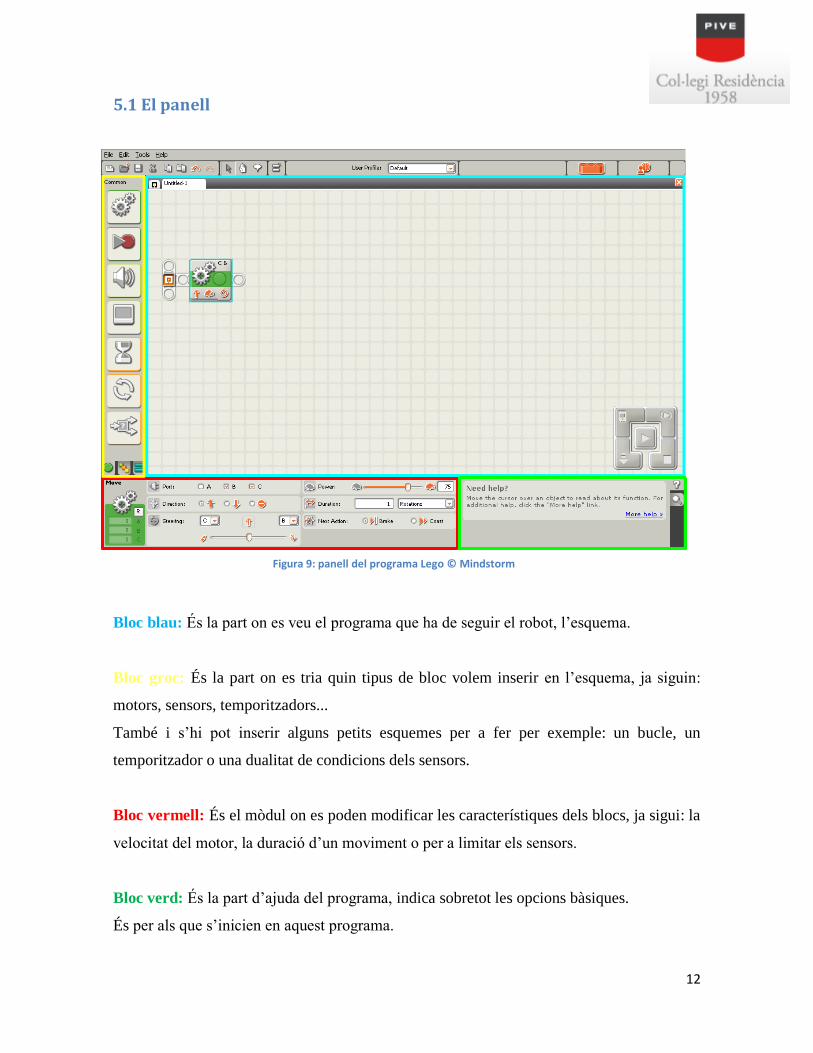
5.1 El panell
Bloc blau: És la part on es veu el programa que ha de seguir el robot, l’esquema.
Bloc groc: És la part on es tria quin tipus de bloc volem inserir en l’esquema, ja siguin:
motors, sensors, temporitzadors...
També i s’hi pot inserir alguns petits esquemes per a fer per exemple: un bucle, un
temporitzador o una dualitat de condicions dels sensors.
Bloc vermell: És el mòdul on es poden modificar les característiques dels blocs, ja sigui: la
velocitat del motor, la duració d’un moviment o per a limitar els sensors.
Bloc verd: És la part d’ajuda del programa, indica sobretot les opcions bàsiques.
És per als que s’inicien en aquest programa.
Figura 9: panell del programa Lego © Mindstorm

13
5.2 Sensors
Aquests són els blocs principals que representen els sensors que podem emprar per a
fer el nostre programa (de xoc, de proximitat, de color, de intensitat lumínica, de intensitat
sonora respectivament).
5.2.1 Característiques sensors
En la següent imatge s’hi poden les possibles variacions que es poden modificar en
un sensor de xoc.
En aquest apartat indiquem a la maquina en quin port esta el sensor de xoc.
En aquest espai indiquem que estem treballant amb un sensor.
En aquest espai indiquem les opcions que fan que aquest sensor s’activi.
En aquest espai indiquem de quin sensor es tracta.
Figura 10: bloc de sensors Lego ©

14
5.3 Motors
Aquest es el bloc de motor, en un “ladrillo” s’hi poden arribar a connectar 3, els
quals denominarem “A” “B” “C” (depenen de la entrada a la que els connectem).
5.3.1 Característiques motors
Aquesta part serveix per indicar quans motors s’activaran al arribar a aquest bloc.
Aquesta part serveix per indicar la direcció cap on han de girar els motors.
Aquesta part serveix per a indicar cap on han de girar els motors (en cas que n’hi hagi un
màxim de dos connectats en el bloc).
Aquesta part serveix per indicar la potència del motor.
Aquest espai serveix per indicar la duració de l’acció ja sigui en segons, rotacions...
Aquest espai serveix per indicar si volem fer una parada abans de la següent acció.
Figura 11: bloc motor Lego ©

15
5.4 Altres elements
Els altres elements que es poden trobar en mindstorm son peces que ajuden a
enllaçar els motors i sensors. També permeten crear bucles o variables per a diferents
ocasions.
Els principals elements son:
1- Bucle: serveix per a fer que una acció es repeteixi indefinidament.
El que es vol que es repeteixi, s’ha de posar dins de l’element bucle.
2- Variable: permet crear diferents opcions de futur depenent de la situació.
Figura 12: element de bucle amb un motor
Figura 13: element variable Lego ©
16
6. El projecte: Programació del robot de neteja MARK
6.1 Per que un robot de neteja.
En aquests últims anys s'han posat de moda els robots domèstics que netegen el
terra i tothom a sentit a parlar d'algun conegut que en té un. Aquests robots són bastant útils
en la nostra vida quotidiana en la que no hi ha gaire temps a fer les feines de la casa i, a
més, ofereixen l’avantatge de que poden funcionar quan no estem a casa.
Un robot de neteja comercial s’usa per a escombrar el terra d’una casa mitjançant
uns raspalls i un petit aspirador incorporat que recull la brossa dipositant-la en un
compartiment que desprès hem de buidar nosaltres. Aquest robot pot evitar escales, taules,
cadires, mobles, tot allò d’us quotidià en una casa. També pot canviar d’habitació amb un
petit aparell que l’indica on està la porta per a que hi passi.
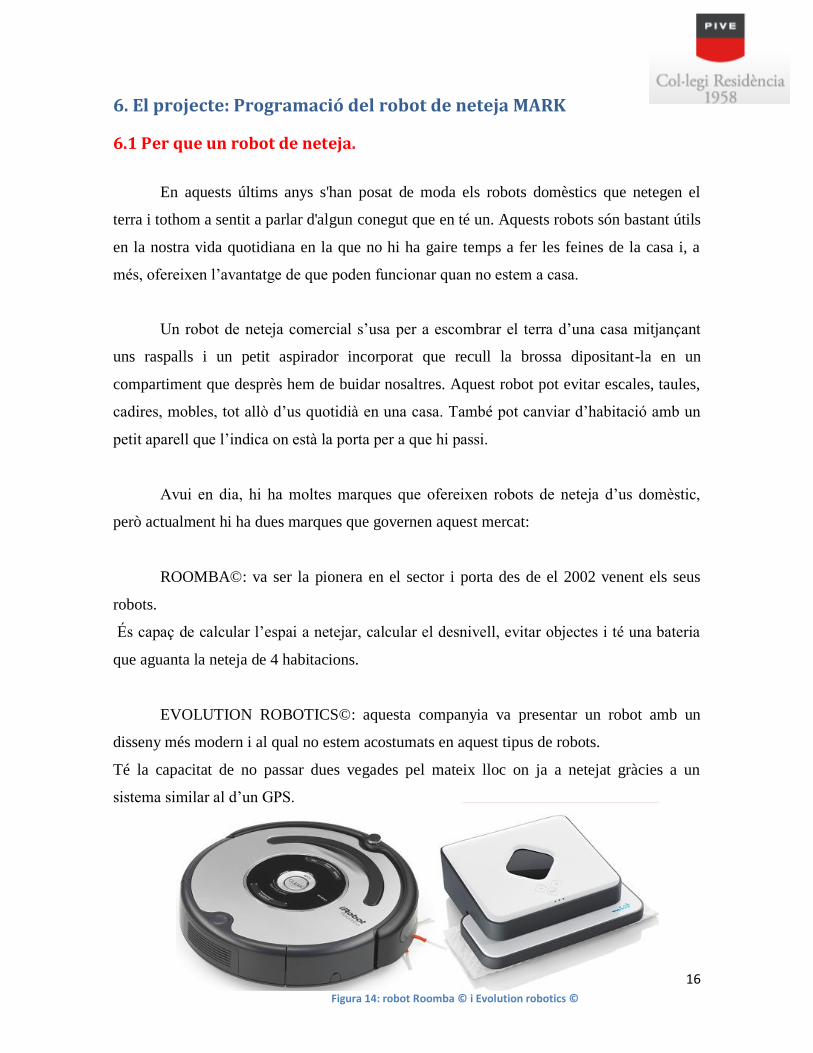
Avui en dia, hi ha moltes marques que ofereixen robots de neteja d’us domèstic,
però actualment hi ha dues marques que governen aquest mercat:
ROOMBA©: va ser la pionera en el sector i porta des de el 2002 venent els seus
robots.
És capaç de calcular l’espai a netejar, calcular el desnivell, evitar objectes i té una bateria
que aguanta la neteja de 4 habitacions.
EVOLUTION ROBOTICS©: aquesta companyia va presentar un robot amb un
disseny més modern i al qual no estem acostumats en aquest tipus de robots.
Té la capacitat de no passar dues vegades pel mateix lloc on ja a netejat gràcies a un
sistema similar al d’un GPS.
Figura 14: robot Roomba © i Evolution robotics ©
17
A mi, personalment, em va atreure la idea de crear un robot que tingues una utilitat
practica i que pogués treballar sol una vegada programat, que no necessites l'ajuda humana
en cap moment del seu procés.
6.2 Casos considerats: MARK-1 i MARK-2
Com tot robot de neteja, jo també volia que pogués tenir mes d’un programa per a
poder realitzar algunes neteges mes especialitzades, com la de poder netejar una habitació
qualsevol, o una mes especifica, netejar nomes les cantonades de les habitacions (MARK-1
i MARK-2 respectivament).
6.2.1 MARK-1
El MARK-1 des del primer moment es tenia pensat que imités els robots de neteja
comercials, és a dir, havia de netejar una habitació desconeguda per a ell podent evitar
obstacles i qualsevol entrebanc.
L’única manera de fer un robot de neteja amb peces de Lego© era donant-li una
forma bàsica quadrada, amb tracció a les rodes de darrere.
El sistema que té per a netejar el terra és molt senzill. Es tracta d’una peça amb
forma circular que té un drap enganxat que va a la part del darrere del robot i que està
connectada a un motor que li dóna un moviment circular que va netejant el terra.
Es va decidir que el recorregut que hauria de fer el robot
alhora de netejar el terra hauria de ser com els dels primers robots
de neteja: en forma d’espiral. Aquesta sistema és molt útil perquè
permet que el robot vagi donant voltes per l’habitació de tal
manera que ens permeti que en una estona estigui bona part de
l’habitació netejada. Figura 15: moviment MARK-1

18
Per a poder evitar xocs amb objectes que estiguin pel terra alhora de fer la neteja, el
robot porta al a seva part davantera dos sensors de xoc que l’avisen en cas de xoc frontal.
En aquest moment el robot tirarà cap enrere (en línia recta) en un període de tres segons i
tornarà a fer el seu moviment en espiral. Però, com és possible que en la seva anada cap
enrere xoqui contra algun altre objecte, el robot porta incorporat a la part del darrere un
sensor de proximitat que l’avisa quan té un objecte a uns 10 cm i, llavors, el robot deixa
d'anar cap enrere i torna també a fer el circuit en espiral.
6.2.2 MARK-2
El MARK-2 és un robot molt similar físicament al MARK-1, l’única diferència
notòria és que el sensor del xoc es situa a la part dreta del robot.
La funció d’aquest segon projecte és nomes la de netejar els perímetres de
l’habitació.
Per a fer-ho hem de situar el robot al costat d’una paret i ell ja començarà a resseguir-la.
El robot està preparat per mantenir sempre una distància de 10 cm de la paret i, al arribar a
un racó de l’habitació, fer una rotació de 90° per a continuar netejant la següent paret.
6.3 Procés de programació.
El procés de programació ha sigut l'etapa més llarga en el desenvolupament del
treball, ja que una vegada muntat el robot s’ha de preparar un pla inicial del que volem que
faci el robot i de quina manera podem fer-ho, ja que en programació hi ha més d'un camí
per arribar a un mateix fi. El programa creat per a un robot és una part molt important d’ell,
ja que definirà les tasques que volem que faci i depenent del programa el rendiment serà un
o un altre.
19
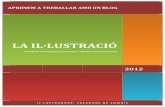
6.3.1 Procés de programació per al MARK-1
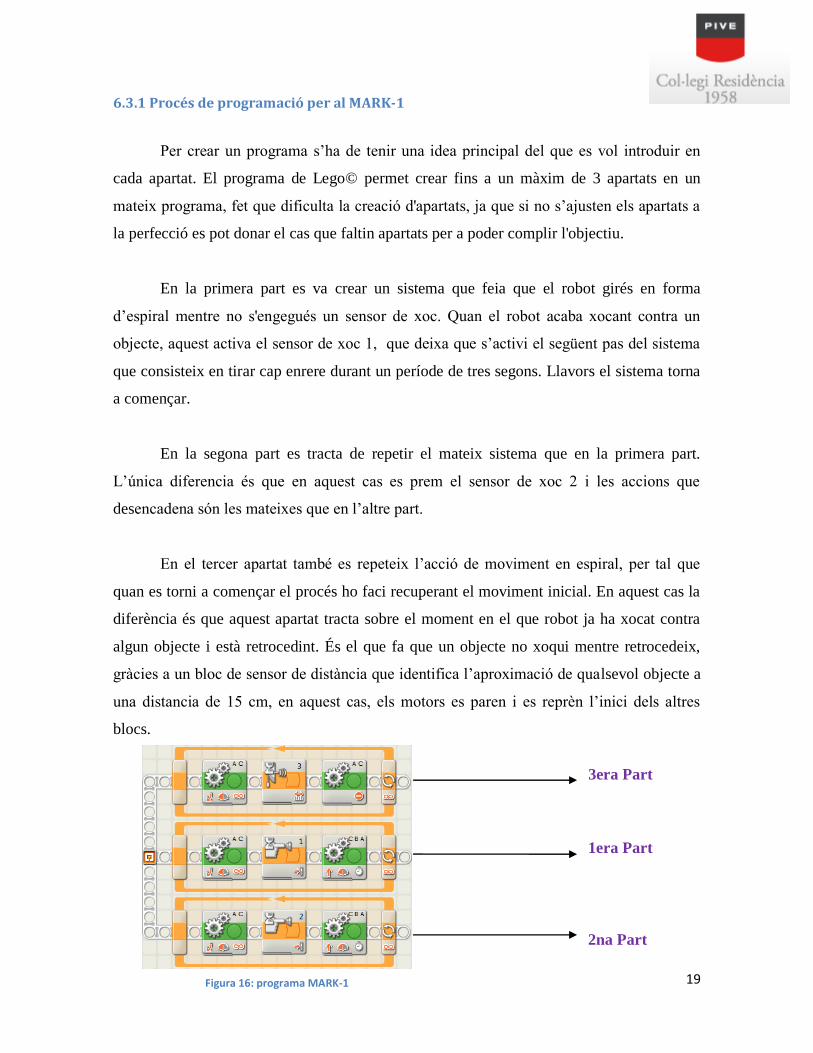
Per crear un programa s’ha de tenir una idea principal del que es vol introduir en
cada apartat. El programa de Lego© permet crear fins a un màxim de 3 apartats en un
mateix programa, fet que dificulta la creació d'apartats, ja que si no s’ajusten els apartats a
la perfecció es pot donar el cas que faltin apartats per a poder complir l'objectiu.
En la primera part es va crear un sistema que feia que el robot girés en forma
d’espiral mentre no s'engegués un sensor de xoc. Quan el robot acaba xocant contra un
objecte, aquest activa el sensor de xoc 1, que deixa que s’activi el següent pas del sistema
que consisteix en tirar cap enrere durant un període de tres segons. Llavors el sistema torna
a començar.
En la segona part es tracta de repetir el mateix sistema que en la primera part.
L’única diferencia és que en aquest cas es prem el sensor de xoc 2 i les accions que
desencadena són les mateixes que en l’altre part.
En el tercer apartat també es repeteix l’acció de moviment en espiral, per tal que
quan es torni a començar el procés ho faci recuperant el moviment inicial. En aquest cas la
diferència és que aquest apartat tracta sobre el moment en el que robot ja ha xocat contra
algun objecte i està retrocedint. És el que fa que un objecte no xoqui mentre retrocedeix,
gràcies a un bloc de sensor de distància que identifica l’aproximació de qualsevol objecte a
una distancia de 15 cm, en aquest cas, els motors es paren i es reprèn l’inici dels altres
blocs.
3era Part
1era Part
2na Part
Figura 16: programa MARK-1

20
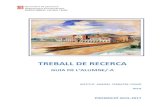
6.3.1 Procés de programació per al MARK-2
La idea principal d’aquest programa era la de netejar les bores de les parets i
també consta de tres parts com l’anterior.
En el primer apartat hi trobem un programa que contempla dues possibilitats: la de
quan està a una distància de més de 10 cm de la paret i la de quan està a una distància més
petita de 10 cm. En el cas que el robot estigui a una distancia més gran de 10 cm, seguirà en
línia recta. En cas contrari, farà una rotació el motor interior per a tornar a encaminar-se
paral·lelament a la paret.
L’apartat dos te la funció de detectar quan ens allunyem de la paret. Si ens allunyem
de la paret, l’apartat dos s’activa amb el primer bloc de sensor que indica que ens hem
allunyat més de 14 cm de la paret. Llavors, el següent bloc crea una rotació del motor
exterior per tal de redirigir-se cap a la paret.
El tercer apartat té la funció de girar al arribar al final d’una paret. Gràcies a un
sensor de xoc, quan s’activa fa parar tots els motors i aleshores activa el motor interior que
funciona durant unes determinades rotacions que acaben formant un angle de 90° en el
terra. Llavors, s’acaba l’apartat i tornen a funcionar els altres dos apartats.
3er apartat
1er apartat
2n apartat
Figura 17: programa MARK-2

21
7- Valoració de l’efectivitat dels models MARK-1 i MARK-2
Per valorar l’efectivitat del robot, en qualsevol dels dos programes que utilitzem,
hauríem de tenir en compte diferents factors com son: les dimensions del robot, autonomia i
espai netejat en un període de temps.
7.1Les dimensions del robot:
Segons aquesta gràfica podem interpretar
que a partir de 30 cm³ un robot de neteja pateix
mes incidents que impedeixen el seu
funcionament correcte .
El nostre robot te unes dimensions una
mica mes grans, fet que dificulta una mica el seu
funcionament per a llocs amb una gran quantitat
de objectes.
7.2 Autonomia:
La alimentació del nostre robot son 6 piles AAA, fet que comporta una durada molt
llarga de la bateria.
7.3 Espai netejat en un període de temps.
El programa de neteja utilitzat en el nostre robot ( netejar en forma de espiral ) és un dels
mes eficaços entre els robots comercials mes antics ( ja que els d’ara fan un reconeixement
de l’habitació ). Per tant, es pot dir que el nostre robot té un bon rendiment alhora de netejar
en un cert període de temps.
Figura 18: grafica dimensions X casos problematics

22
8. Procés de depuració i millora de la màquina.
Hi ha bastants factors millorables en aquest robot comparat amb els comercials.
En futures versions s’hi poden introduir millores com per exemple:
-El retorn a una base de carrega al finalitzar la neteja.
En el nostre robot no hi tenim aquesta possibilitat, el robot no te un límit de
temps per a finalitzar una tasca. L’hem d’aturar nosaltres mateixos per a acabar.
-El sistema de neteja.
El nostre sistema de neteja només escombra, mentre que els comercials
també tenen un sistema de aspiració molt millorat, i en el nostre cas s’hauria de variar la
forma del robot.
-La tracció del robot.
Les rodes de el nostre robot no tenen gaire tracció, fet que ha comportat l’ús
d’un material adherent sobre les rodes.
-El software.
El software es una part molt important, i de ell depèn treure’n un millor
rendiment al robot. Crec que el nostre software podria millorar i treure mes bon rendiment
al sistema i poder ampliar els programes creats.
-El processador.
El processador de el nostre robot no es gaire ràpid, fet que comporta que
tinguem que fer anar el nostre robot mes lentament i mes descoordinat que amb un
processador millor.

23
9. Conclusions
Al iniciar el treball s’havien marcat unes fites a les que es volien arribar.
La principal era la de comprendre el funcionament d’un robot de neteja comercial i
intentar imitar les seves característiques principals, com són tenir les capacitats de: netejar
el terra amb una escombra, fer un moviment similar als robots de neteja i evitar objectes.
Aquetes fites han sigut realitzades en el transcurs del treball sense més problema, però a
una escala d’efectivitat mes petita ja que no s’ha pogut imitar els robots comercials al
100%. Ja que conten amb peces creades per a ells hi han pogut dissenyar un robot des de
zero. Mentre que en el treball hi ha hagut la limitació com és la de construir el robot a partir
de el que dona la línea de robots Lego©. La part mes difícil d’elaborar ha sigut la part de
programació, ja que al ser un llenguatge de programació amb el que no s’havia treballat
prèviament, la dificultat ha sigut mes alta.
Personalment, m’ha agradat fer aquest treball, ja que feia temps que volia fer un
robot. Principalment per veure si n’era capaç i després per que m’ha agradat veure que no
tot el procediment teòric s’ha pogut portar a la pràctica tan fàcilment com semblava des
d’un principi. I aquest fet ha fet que tingues que pensar altres vies per arribar a un mateix
lloc i així veure que en aquest tipus de projectes hi ha més d’una via viable.
També m’ha agradat per que he pogut veure com funcionen els robots a grans trets i
he descobert la gran varietat de sensors que existeixen i n’he après a utilitzar els mes
generals.
En conclusió, ha sigut un treball que m’ha agradat molt, que m’ha costat moltes
hores i que n’he après una mica més sobre aquest món de la robòtica.

24
10. Annexos
10.1 Els programes.
Per a descarregar els programes creats per al MARK-1 i per al MARK-2, dirigiu-vos
a el següent enllaç.
Programa MARK-1
http://www.mediafire.com/?76a5qczawqi672x
Programa MARK-2
http://www.mediafire.com/?0syhcc1t679c1h7
10.2 Galeria d’imatges. A través d’aquest enllaç podreu veure les fotos utilitzades en el treball:
http://www.flickr.com/photos/74340366@N08/sets/72157628855201889/
10.3 Galeria de vídeos publicats a la xarxa.
11. Bibliografia
anàlisi traçat robot Roomba ©
http://megustalaroomba.com/2011/01/17/donde-pasa-roomba-recorrido-limpieza/
Article sobre els robots:
http://es.wikipedia.org/wiki/Robot
Treball sobre el disseny d’un robot de neteja domèstic :
http://robotica.udl.cat/tfc/pdf/david_pernia.pdf
Web del grup de robotica de Bellvitge
http://tecnobloc.wordpress.com/robotica-amb-lego/
Web dedicada a la robótica:
http://blog.electricbricks.com/es/2010/04/cerradura-electronica-en-nxt-g/