Transfomracion Conforme y Criterio Nyquist
11
Instituto Tecnológico de Piedras Negras Piedras Negras, Coah. 19/Octubre/2015 Control II Ingeniería Electr ónica Chio alinas !artín "uis #ntonio $e "a Cru% &'(iga N) de control* 12/112 Investigación: T ransformación conforme y Criterio de Nyquist Transformación conforme
Transcript of Transfomracion Conforme y Criterio Nyquist

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 1/11
Instituto Tecnológico dePiedras Negras
Piedras Negras, Coah. 19/Octubre/2015
Control II
Ingeniería Electrónica
Chio alinas !artín
"uis #ntonio $e "a Cru% &'(iga N) de control*
12/112
Investigación: Transformación conforme
y Criterio de Nyquist
Transformación conforme

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 2/11
Definición y propiedades
Consideremos Ω⊆C y sea f ∈ H (Ω) . Sea z0ϵΩ
supongamos que f
no es constante. Entonces, f ( z )= f ( z0 )+ ( z− z0 )m
g ( z ) con g∈ H (Ω ) , g( z0)≠ 0.
Sea γ (t ) , ω (t ) dos curvas diferenciables que se intersectan en z0 , es decir,
γ ( t 0 )=ω (t 0 )= z0.
Sea
θ
el angulo en que se intersectan
γ ( t )y
ω( t ) en
z0
, es decir
θ= Argω' ( t 0 )− Arg γ
' (t 0 )ϵ (−π ,π ) . Por lo tanto
ω ( t )−ω (t )−ω (t 0 )γ (t )−γ ( t 0 )
=limt→t 0
ω (t )− z0
γ (t )− z0
Arg¿
θ= Argω
' (t 0 )γ
' (t 0 ) =lim
t →t 0
¿
Sea β el angulo que formanf 0 γconf 0ωenw0=f ( z0 ) . entonces se tiene
β=limt→t
0
Arg( f (ω ( t ) )−f (ω ( t 0 ))f (γ ( t ) )−f (γ (t 0 )) )=lim
t →t 0
Arg( f 0 ω ( t )−f ( z0 )f 0 γ (t )−f ( z0 ) )=lim
t→ t 0
Arg{(ω (t )− z0
γ (t )− z0 )
m
∗g (ω (t ) )
g ( γ ( t ) ) },2

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 3/11
Por lo tanto β=m θ
Lo anterior significa que f ' ( z0 )=…=f
(m−1 ) ( z0 )=0, f m( z
0)≠0
, entonces f
transforma curvas que se cortan en un aguloθ
, en curvas que se cortan en un
angulo m θ . En particular, sif ' ( z0)≠0,
entonces este ángulo se preserva.
Definición
Una función f :Ω→C se llama conforme o transformación conforme en
aϵ Ω , si f preserva angulos entre curvas diferenciables que se intersectan
en a y f es real diferenciable en a .
Teorema
.!Si f ϵ H (Ω) y si f ' (a)≠0, entonces f es conforme en a .
".!Si f es conforme en una región y su diferencial #real$ es ≠0en Ω , entonces
f
es anal%tica en
y f ' (a)≠0
Ω ¿ para
a
en
Ω
$.
Demostración
sea w=f ( z ) . Se puede suponer a=0, y f (0 )=0 #pues si f ( a )=b ,
cambiamos f por g definida por g ( z )=f ( z+a )−b y g (0)=0¿ .
+

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 4/11
β−θ0
=α
Seaθ0 el angulo que forman la imagrn del e&e real con el e&e real del plano
w . '(ora si L es la recta y=m ,m=tangα y β es angulo de la tangente
de f ( L) , se tiene que β−θ0=α , es decir β−α =θ0=con!tante , por lo tanto
tan ( β−α )=tan (θ0 )=c=con!tante .
Sea f ="+# $ , f ( , m )=" ( , m )+#$ ( , m ) , entonces se tiene
$ ( ,m )" ( ,m)
=lim →0
$ ( ,m )
" ( ,m )
=lim →0
%$
% ( ,m )
%"
%
( ,m)=¿
$ +m $ y
" +m" y
(0,0 ) ,
tang ( β )=lim → 0
¿
#si" (0,0 )
ó" y (0,0 )=0
, puesto que la diferencial es diferente de ),
$ (0,0)≠0 ó
$ y (0,0 ) ≠0 por lo que podemos tomar cotβ en lugar de
tang β ¿ .
'(ora bien ,
,

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 5/11
tang ( β−α )=tang ( β )−tang (α )
1+tang(α ) tang( β)=
$ +m $ y
" +m" y
−m
1+m∗$ +m $ y
" +m" y
=c& $ +m $ y−m (" +m" y)=c (" +m" y+m $ +m
, o sea −m2 " y+m ( $ y−" )+$ =c " +c m (" y+$ )+cm2 $ y .
Los coeficientes de las diversas potencias de m deben ser iguales por lo que
obtenemos
−" y=c $ y
$ y−" =c (" y+$ )
$ =c "
Sustituyendo las primeras dos ecuaciones en la tercera obtenemos
$ y−" =c (−c $ y+c " )=−c2 ( $ y−" ) & (1+c
2 ) ($ y−" )=0 & $ y=" y
" y=−c $ y=−c " =−$
Estas son las ecuaciones de Cauc(y!*iemann, lo cual prueba que f es
anal%tica.
Observación
E+isten funciones que preservan ángulos y cuya diferencial real es ), por lo qie se
sigue 2 que estas funciones son comple&o diferenciables en el punto pero no en
una vecindad del punto.
5

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 6/11
Criterio de Nyquist
ntroducción.
La definición de estabilidad adoptada y los criterios de equivalencia nos permitendecidir si una transferencia dada corresponde a un sistema estable o inestable.-asta ubicar la posición de los polos de esa transferencia para saberlo.Este es un criterio de estabilidad absoluto es decir, nos informa si un sistema esestable o no./uc(as veces no alcan0a con esa información es necesario saber si un sistemaes estable, cuán cerca está de de&ar de serlo.Con ese propósito, y para tener una visión más completa del problema se (andesarrollado otros criterios, de los cuales en el presente módulo anali0aremos elcriterio de 1yquist.
El criterio de estabilidad de 1yquist determina la estabilidad de un sistema en la0ocerrado a partir de la respuesta de la función de transferencia en la0o abierto y delos polos de 2sta.Este criterio se basa en el 3eorema de la transformación de la teor%a de la variablecomple&a, y es 4til en la ingenier%a de control porque en su aplicación, paradeterminar la estabilidad de un sistema, no se necesita la determinación de lospolos de su función de transferencia en la0o cerrado.Para el estudio del criterio de estabilidad de 1yquist, considere un sistema en la0ocerrado como el que muestra la 5igura .
-gura 1. istea en la%o cerrado
y su correspondiente función de transferencia

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 7/11
C (! ) ( ! )
= ( ( !)
1+( (! ) H (!) 1
Se supone que la función de transferencia en la0o abierto ((!) H (!) se
representa como un cociente de polinomios en ) ! * . Para un sistema que
puede materiali0arse f%sicamente, el grado del polinomio del denominador de lafunción de transferencia en la0o cerrado debe ser mayor o igual que el del
polinomio del numerador. Esto significa que el l%mite de ((!) H (!) , cuando
) ! * tiende a infinito, es cero o una constante para cualquier sistema que pueda
materiali0arse f%sicamente.
Para la estabilidad, todas las ra%ces de la ecuación caracter%stica
1+( ( ! ) H (! )=0 2
6eben estar en el semiplano i0quierdo del plano ) ! * . 7Se debe se8alar que,
aunque los polos y ceros de la función de transferencia en la0o abierto((!) H (!) pueden estar en el semiplano derec(o del plano ) ! * , el sistema
solo es estable si todos los polos de la función de transferencia en la0o cerrado#es decir, las ra%ces de la ecuación caracter%stica$ están en el semiplano i0quierdodel plano 9s:;.
El criterio de estabilidad de 1yquist relaciona la respuesta, en el dominio de la
frecuencia, de la función de transferencia en la0o abierto (( +ω) H ( +ω) con el
n4mero de ceros ( ) y polos ( -) de 1+((! ) H (!) que se encuentran en el
semiplano derec(o del plano 9s:.
Enunciado del Criterio de estabilidad de Nyquist
Si la trayectoria de 1yquist en el plano 9s: encierra ceros y - polos de
1+( (! ) H (!) y no pasa por los polos ni los ceros de 1+((! ) H (!) conforme
un punto representativo 9s: se mueve en el sentido de las agu&as del relo& a lolargo de la trayectoria de 1yquist, el contorno correspondiente en el plano
((!) H (!) rodea en un c%rculo = / - veces el punto −1+ +0 en el
3

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 8/11
sentido de las agu&as del relo&. #Los valores negativos de 1 implican rodeos ensentido contrario al de las agu&as del relo&$
'l e+aminar la estabilidad de los sistemas de control lineales mediante el criteriode estabilidad de 1yquist, se observa que se pueden presentar tres casos
. El punto −1+ +0 no está rodeado. Esto implica que el sistema es estable si
no (ay polos de ((!) H (!) en el semiplano derec(o del plano 9s:< de lo
contrario, el sistema es inestable
". El punto −1+ +0 queda rodeado una o varias veces en sentido contrario al de
las agu&as del relo&. En este caso, el sistema es estable si el n4mero de rodeos ensentido contrario al de las agu&as del relo& es igual al n4mero de polos
((!) H (!) en el semiplano derec(o del plano 9s:< de lo contrario, el sistema es
inestable
=. El punto −1+ +0 queda rodeado una o varias veces en el sentido de las
agu&as del relo&. En este caso el sistema es inestable.Contorno que encierra todo el semiplano 6erec(o del plano s
Un sistema de retroalimentación es estable si y solamente si, el contorno 0 1
.En el plano -(!) no rodea el punto (−1+ + 0) cuando el n4mero de polos de
-(!) en la parte derec(a del plano s es cero #Sistema de fase minima$.
Un sistema de control con retroalimentación es estable si y solamente si, en el
contorno 0 1 el n4mero de rodeos al punto (−1+ + 0) en el sentido contrario al
movimiento del relo& es igual al n4mero de polos de -(!) con partes reales
positivas.
4

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 9/11
Estabilidad relativa y criterio de Nyquist
El criterio de estabilidad de 1yquist se define en t2rminos del punto (−1+ + 0)
.En la gráfica polar. La pro+imidad a ese punto determina la estabilidad relativa deun sistema.
El margen de ganancia se define como el rec%proco de la ganancia +ω∨¿¿(H ¿
.para la frecuencia en que el ángulo de fase alcan0a >)?, es decir cuando $=0
.El margen de ganancia es el factor por el cual se tendrá que multiplicar laganancia del sistema para que el lugar geom2trico pase a trav2s del punto
(−1+ + 0)
2argen3e gananc#a=1
3
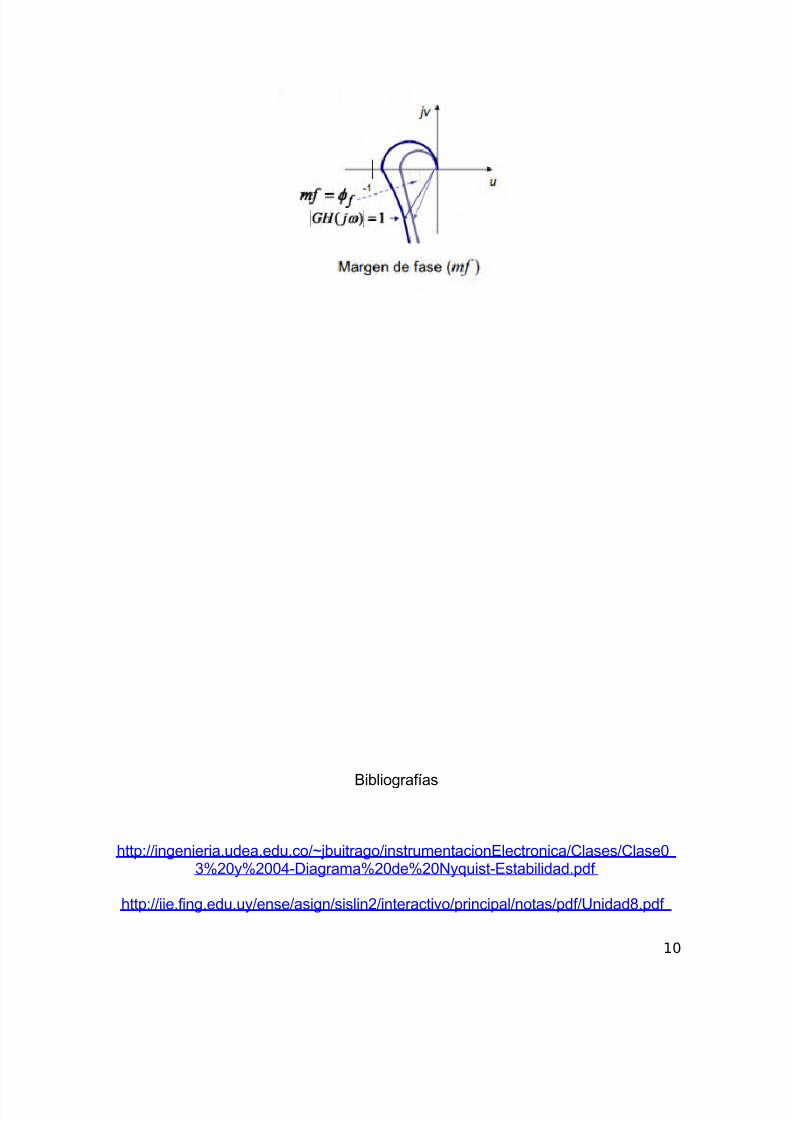
@tra medida de la estabilidad relativa es el margen de fase, que se define como
el ángulo de fase que se debe girar el lugar geom2trico (H ( +ω) para que el
punto de magnitud unitaria |(H ( +ω )|=1 pase a trav2s del punto (−1+ + 0) en
el plano (H ( +ω) .
9
7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 10/11
-ibliograf%as
(ttpAAingenieria.udea.edu.coAB&buitragoAinstrumentacionElectronicaAClasesAClase)=")y"))D!6iagrama")de")1yquist!Estabilidad.pdf
(ttpAAiie.fing.edu.uyAenseAasignAsislin"AinteractivoAprincipalAnotasApdfAUnidad>.pdf
10

7/25/2019 Transfomracion Conforme y Criterio Nyquist
http://slidepdf.com/reader/full/transfomracion-conforme-y-criterio-nyquist 11/11
(ttpAAgaleon.comAmac(verAC@13*@LP*@CA>1FGUS3.pdf
(ttpAAHHH.ctrl.cinvestav.m+ABgvillaAIariableComple&a.pdf
11