Tractor Movil en C++
11
PROGRAMACION DIGITAL I Tema: Proyecto de programación digital I. Horario: Jueves de 11 a 2 pm. Proyecto: Tractor móvil. Ciclo: 2014-B Integrantes: Choqque Cusihuaman Renzo Isaac. Huamani Alata Antony. Armas Espinoza Christopher. Pinto Odar Haldan Alexis. Huallpa Huallpa Ivan. 2 0 1 4
-
Upload
brandon-payano -
Category
Documents
-
view
3 -
download
0
description
Programacion
Transcript of Tractor Movil en C++

PROGRAMACION DIGITAL I
Tema: Proyecto de programación digital I.
Horario: Jueves de 11 a 2 pm.
Proyecto: Tractor móvil.
Ciclo: 2014-B
Integrantes:
Choqque Cusihuaman Renzo Isaac. Huamani Alata Antony. Armas Espinoza Christopher. Pinto Odar Haldan Alexis. Huallpa Huallpa Ivan.
2 0 1 4

TRACTOR MOVIL EN C++
Descripción de Nuestro Programa:En nuestro proyecto trataremos de que un tractor trate de cumplir con las siguientes funciones:
[1] ADELANTE [2] ATRAS [3] IZQUIERDA [4] DERECHA [5] SUBIR GRUA [6] BAJAR GRUA [7] ABRIR PINZA [8] CERRAR TENAZA [ESPACIO] DETENER [ESC] SALIR
Usamos el Turbo c para ejecutar el código del programa en el circuito.
TURBO C:
Turbo C era un entorno de desarrollo integrado y compilador desarrollado por Borland para programar en lenguaje C.
Su primera versión es de 1987, a la que siguieron las versiones 1.5 y 2.0, de 1989. Fue el compilador más popular para desarrollar en C en entornos MS-DOS. Se le considera el primer IDE para C disponible para dicha plataforma.
Fases de un programa en Turbo C
Las fases de un programa en Turbo C se pueden resumir en:
Edición
Compilación
Enlazado
Ejecución
La Edición de un programa consiste, simplemente, en editar el código fuente del programa, Turbo C incluye un editor para este efecto.

La Compilación del programa consiste en convertir el código fuente en código objeto.
El Enlazado consiste en enlazar el código objeto para obtener el código ejecutable.
Finalmente, la Ejecución consiste precisamente en ejecutar el programa.
El entorno de Turbo C
El entorno de Turbo C facilita la edición, compilación y el enlazado de los programas, ya que incluye un editor y herramientas para compilar y enlazar los programas, para configurar el entorno de Turbo C, primero hay que conocerlo, a continuación se explican las características más importantes del entorno.
Programa turbo c:
Puerto paralelo. Vamos a dar ciertos detalles sobre el puerto paralelo:
Un puerto paralelo es una interfaz entre una computadora y un periférico cuya principal característica es que los bits de datos viajan juntos enviando un byte completo o más a la vez. Es decir, se implementa un cable o una vía física para cada bit de datos formando un bus.
El cable paralelo es el conector físico entre el puerto paralelo y el periférico. En un puerto paralelo habrá una serie de bits de control en vías aparte que irán en ambos sentidos por caminos distintos.

En contraposición al puerto paralelo está el Puerto serie, que envía los datos bit a bit por el mismo hilo.
El sistema operativo gestiona las interfaces de puerto paralelo con los nombres LPT1, LPT2 y así sucesivamente, las direcciones base de los dos primeros puertos es:
LPT1 = 0×378.
LPT2 = 0×278
La estructura consta de tres registros: de control, de estado y de datos.
El registro de control es un bidireccional de 4 bits, con un bit de configuración que no tiene conexión al exterior, su dirección en el LPT1 es 0x37A.El registro de estado, se trata de un registro de entrada de información de 5 bits, su dirección en el LPT1 es 0×379.El registro de datos, se compone de 8 bits, es bidireccional. Su dirección en el LPT1 es 0×378.
Conector DB25.
La descripción de este conector se da a continuación:
Materiales: 2 Integrados L293B. Un Protoboard. Cable macho. 4 Motores de 3 a 5 voltios. Cable Puerto Paralelo. Tractor de juguete. Turbo c++. Fuente de 5 voltios.
PROGRAMACION EN TURBO C:

#include<dos.h>
#include<conio.h>
#include<iostream.h>
void main()
{ char tecla;
int puerto;
puerto=0;
outport(0x378,puerto);
clrscr();
gotoxy(30,1);cout<<"ÉÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍ»";
gotoxy(30,2);cout<<"º CONTROL DE GRUA C++ º";
gotoxy(30,3);cout<<"ÈÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍÍͼ";
gotoxy(33,6);cout<<"";
gotoxy(33,7 );cout<<" [1] ADELANTE ";
gotoxy(33,8 );cout<<" [2] ATRAS ";
gotoxy(33,9 );cout<<" [3] IZQUIERDA ";
gotoxy(33,10);cout<<" [4] DERECHA ";
gotoxy(33,12);cout<<" [5] SUBIR GRUA ";
gotoxy(33,13);cout<<" [6] BAJAR GRUA ";
gotoxy(33,14);cout<<" [7] ABRIR PINZA ";
gotoxy(33,15);cout<<" [8] CERRAR TENAZA";
gotoxy(33,17);cout<<" [ESPACIO] DETENER ";
gotoxy(33,18);cout<<" [ESC] SALIR ";

gotoxy(29,20);cout<<"*- PULSE LA OPCION DESEADA -*";
while(1)
{ tecla=getch( );
if(tecla=='1')
{ puerto=5; //0000 0101
outport(0x378,puerto);}
if(tecla=='2')
{ puerto=10; //0000 1010
outport(0x378,puerto);}
if(tecla=='3')
{ puerto=4; //0000 0100
outport(0x378,puerto);}
if(tecla=='4')
{ puerto=1; //0000 0001
outport(0x378,puerto); }
if(tecla=='5')
{puerto=16; //0001 0000
outport(0x378,puerto);}

if(tecla=='6')
{puerto=32; //0010 0000
outport(0x378,puerto);}
if(tecla=='7')
{ puerto=64; //0100 0000
outport(0x378,puerto);}
if(tecla=='8')
{ puerto=128; //1000 0000
outport(0x378,puerto);}
if(tecla==32)
{ puerto=0; //0000 0000
outport(0x378,puerto);}
if(tecla==27)
{ outport(0x378,0);
break;}
}
}

Para la programación solo se usó 3 librerías las cuales son < iostream.h> que sirve para la entrada y salida de datos el <dos.h> que es para el puerto paralelo y la sentencia selectiva (if).
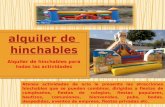
PROYECTO:
En esta imagen vemos el tractor ya terminado con todo el cableado, al costado tenemos el protoboard donde el circuito para la entra del puerto paralelo.
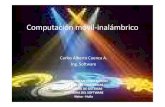
Puente H en protoboard:

En esta imagen vemos el circuito llamado puente H que hace posible el movimiento de los motores, está conectado al cable puerto paralelo que va en la PC.
Foto Grupal: